Область техники, к которой относится изобретение
Настоящее изобретение относится к многоэкранному устройству отображения, которое отображает видео на полиэкране, включающем в себя множество экранов.
Уровень техники
Одно из устройств, которые отображают видео на больших экранах, является многоэкранным устройством отображения, которое отображает видео на полиэкране, включающем в себя множество экранов. В многоэкранном устройстве отображения, множество устройств отображения видео функционируют совместно друг с другом. То есть, многоэкранный дисплей функционирует как одно устройство посредством множества устройств отображения видео. Многоэкранное устройство отображения включает в себя множество устройств отображения видео, скомпонованных в матрицу. Матрица имеет, например, три ряда и три столбца. Эта конфигурация предусматривает большие экраны.
В многоэкранном устройстве отображения, включающем в себя множество устройств отображения видео, видео на индивидуальных экранах, включенных в полиэкран, должно быть равным по яркости и качеству отображения. Таким образом, яркость и качество отображения видео, отображаемого на экранах индивидуальных устройств отображения видео, должно быть отрегулировано для каждого из устройств отображения видео. Чтобы совершить такие регулирования, должны быть заданы идентификационные номера для идентифицирования индивидуальных устройств отображения видео.
Выложенная заявка на патент Японии № 2006-254275 (параграфы 0020-0026, Фиг. 4) раскрывает способ (в дальнейшем также называемый "родственной областью техники A") для задания идентификационных номеров (ID-номеров) для индивидуальных устройств отображения, посредством использования удаленного контроллера.
В случае, когда видео отображается на полиэкране как целое, каждый из экранов, включенных в полиэкран, отображает расширенный вид части видео. В этом случае, расположение экрана каждого устройства отображения видео должно быть идентифицировано в полиэкране.
Патент Японии № 5193563 (параграфы 0069-0074, Фиг. 7) раскрывает способ (в дальнейшем называемый "родственной областью техники B") для обнаружения расположения каждого из множества устройств отображения соединенных посредством гирляндного соединения посредством, например, выделенных последовательных кабелей. В частности, согласно родственной области техники B, устройство формирования изображения захватывает изображения, отображаемые на индивидуальных устройствах отображения. Затем, расположение индивидуального устройства отображения обнаруживается на основе захваченных изображений.
Раскрытие изобретения
К сожалению, родственные области техники A и В вызывают нижеследующее проблемы. В частности, родственная область техники A, с использованием которой идентификационные номера (ID-номера), являющиеся идентификационной информацией, задаются для индивидуальных устройств отображения (устройств отображения видео), включенных в многодисплейное устройство, требует задания идентификационных номеров для индивидуальных устройств отображения видео, где каждое служит как устройство отображения, посредством использования, например, удаленного контроллера. Таким образом, задание идентификационных номеров требует длительного времени.
Родственная область техники В обеспечивает возможность быстрого задания идентификационных номеров посредством использования обнаруженного расположения каждого из устройств отображения (устройств отображения видео), тем самым разрешая проблему, возникающую из родственной области техники A.
Родственная область техники В дополнительно требует устройство формирования изображения для обнаружения расположения каждого из устройств отображения (устройств отображения видео). Таким образом, конфигурация, использующая родственную область техники В, является сложной и таким образом затратной.
Настоящее изобретение имеет целью предусмотреть многоэкранное устройство отображения, способное задавать идентификационные номера для устройств отображения видео посредством простой конфигурации.
Многоэкранное устройство отображения согласно одному аспекту настоящего изобретения включает в себя множество устройств отображения видео, скомпонованных в матрицу и соединенных посредством гирляндного соединения посредством кабеля связи, так чтобы экраны множества устройств отображения видео образовывали полиэкран, имеющий прямоугольную форму. Для множества устройств отображения видео, задается последовательность передачи, в которой информация передается между множеством устройств отображения видео через гирляндное соединение. Опорное устройство отображения видео, которое идет первым в последовательности передачи из числа множества устройств отображения видео, включает в себя блок вычисления, который вычисляет координаты множества устройств отображения видео на полиэкране на основе последовательности передачи и информации компоновки для точного определения конфигурации компоновки множества устройств отображения видео. Блок вычисления вычисляет идентификационный номер для идентифицирования каждого из множества устройств отображения видео на основе предварительно определенного правила для задания идентификационного номера каждому из множества устройств отображения видео. Опорное устройство отображения видео включает в себя блок задания, который выполняет обработку для задания идентификационного номера каждого из множества устройств отображения видео с вычисленными координатами рассматриваемому устройству отображения видео.
Согласно настоящему изобретению, блок вычисления опорного устройства отображения видео, который идет первым в последовательности передачи, вычисляет координаты множества устройств отображения видео на полиэкране на основе информации компоновки и последовательности передачи, описанных выше. Блок вычисления вычисляет идентификационный номер на основе предварительно определенного правила для задания идентификационного номера каждому из множества устройств отображения видео.
Блок задания выполняет обработку для задания идентификационного номера каждого из множества устройств отображения видео с вычисленными координатами рассматриваемому устройству отображения видео.
Например, это устраняет необходимость вычисления координат индивидуального устройства отображения видео для обыкновенного устройства формирования изображения и подобного. Таким образом, координаты индивидуального устройства отображения видео могут быть вычислены посредством простой конфигурации. Как описано выше, блок задания выполняет обработку для задания идентификационного номера каждого из устройств отображения видео с вычисленными координатами рассматриваемому устройству отображения видео. Таким образом, идентификационные номера могут быть заданы индивидуальным устройствам отображения видео посредством простой конфигурации.
Эти и другие цели, признаки, аспекты и преимущества настоящего изобретения станут более понятны из нижеследующего подробного описания настоящего изобретения при рассмотрении совместно с прилагаемыми чертежами.
Краткое описание чертежей
Фиг. 1 является схемой, иллюстрирующей конфигурацию многоэкранного устройства отображения согласно первому предпочтительному варианту осуществления настоящего изобретения;
Фиг. 2 является видом спереди многоэкранного устройства отображения согласно первому предпочтительному варианту осуществления настоящего изобретения;
Фиг. 3 является схемой, иллюстрирующей пример конфигурации полиэкрана согласно первому предпочтительному варианту осуществления настоящего изобретения;
Фиг. 4 является блок-схемой, иллюстрирующей конфигурацию устройства отображения видео согласно первому предпочтительному варианту осуществления настоящего изобретения;
Фиг. 5 является схемой, описывающей конфигурацию для отображения видео на полиэкране;
Фиг. 6 является схемой последовательности операций обработки BX соответствия задания идентификационной информации;
Фиг. 7 является схемой, описывающей расположение ведущего устройства;
Фиг. 8 является схемой, описывающей конфигурацию кабельного соединения в зависимости от расположения ведущего устройства;
Фиг. 9 является схемой, иллюстрирующей другой пример конфигурации соединения индивидуальных устройств отображения видео, включенных в многоэкранное устройство отображения;
Фиг. 10 является схемой, описывающей правило задания идентификационной информации для задания идентификационных номеров i;
Фиг. 11 является схемой последовательности операций обработки BM соответствия задания идентификационной информации;
Фиг. 12 является схемой последовательности операций обработки по вычислению координат;
Фиг. 13 является схемой, описывающей определение направлений в зависимости от расположения ведущего устройства;
Фиг. 14 является схемой последовательности операций обработки BM по вычислению идентификационной информации;
Фиг. 15 является схемой последовательности операций обработки BS соответствия задания идентификационной информации;
Фиг. 16 является схемой, иллюстрирующей пример идентификационных номеров i и координат P, заданных индивидуальным устройствам отображения видео;
Фиг. 17 является схемой последовательности операций обработки NX соответствия задания идентификационной информации;
Фиг. 18 является схемой, описывающей правило задания идентификационной информации для задания идентификационных адресов;
Фиг. 19 является схемой последовательности операций обработки NM соответствия задания идентификационной информации;
Фиг. 20 является схемой последовательности операций обработки NM по вычислению идентификационной информации;
Фиг. 21 является схемой последовательности операций обработки NS соответствия задания идентификационной информации;
Фиг. 22 является схемой, иллюстрирующей пример идентификационных адресов и координат P, заданных индивидуальным устройствам отображения видео; и
Фиг. 23 является схемой конфигурации аппаратных средств устройства отображения видео.
Осуществление изобретения
Со ссылкой на чертежи, нижеследующее описывает предпочтительные варианты осуществления настоящего изобретения. В описаниях ниже, одинаковые ссылочные номера указывают одинаковые составляющие компоненты, что справедливо для их названий и функций. Вследствие этого, их подробные описания могут быть опущены.
<Первый предпочтительный вариант осуществления>
Фиг. 1 является схемой, иллюстрирующей конфигурацию многоэкранного устройства 1000 отображения согласно первому предпочтительному варианту осуществления настоящего изобретения. Со ссылкой на Фиг. 1, направление X и направление Y являются ортогональными друг к другу. Направление X и направление Y, указанные на последовательных чертежах, также являются ортогональными друг к другу. Направление, включающее в себя направление X, и направление (-направление X) противоположное направлению X, в дальнейшем также называется "направлением оси X". Направление, включающее в себя направление Y, и направление (-направление Y) противоположное направлению Y, в дальнейшем также называется "направлением оси Y". Плоская поверхность, включающая в себя направление оси X и направление оси Y, в дальнейшем также называется "плоскостью X-Y".
Фиг. 1 также показывает внешние устройства 5 и 7 управления, также как и концентратор 6, которые не включены в многоэкранное устройство 1000 отображения. Внешние устройства 5 и 7 управления являются, например, персональными компьютерами (PC). Внешнее устройство 5 управления, которое будет подробно описано позднее, управляет многоэкранным устройством 1000 отображения. После задания идентификационных адресов, которые будут описаны позднее, внешнее устройство 7 управления управляет многоэкранным устройством 1000 отображения через сеть. Сетью является, например, локальная сеть (LAN). Каждое из внешних устройств 5 и 7 управления включают в себя интерфейс (в дальнейшем также называемый "операционным интерфейсом"), которым оперирует оператор. Операционным интерфейсом является, например, клавиатура. Внешнее устройство 5 управления не ограничено PC и может быть, например, удаленным контроллером.
Фиг. 2 является видом спереди многоэкранного устройства 1000 отображения согласно первому предпочтительному варианту осуществления настоящего изобретения. Как показано на Фиг. 1 и 2, многоэкранное устройство 1000 отображения включает в себя устройства 100-1, 100-2, 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео.
Каждое из устройств 100-1, 100-2, 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео, которые будут подробно описаны позднее, имеет одинаковую конфигурацию. Каждое из устройств 100-1, 100-2, 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео в дальнейшем также называется "устройством 100 отображения видео".
Многоэкранное устройство 1000 отображения включает в себя двенадцать устройств 100 отображения видео. Число устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, не ограничивается и может составлять любое значение от двух до одиннадцати, тринадцати, или более.
В многоэкранном устройстве 1000 отображения, множество устройств 100 отображения видео функционируют совместно друг с другом, тем самым функционируя как один дисплей или множество дисплеев. Многоэкранное устройство 1000 отображения включает в себя двенадцать устройств 100 отображения видео, скомпонованных, например, в матрицу с тремя рядами и четырьмя столбцами, как показано на Фиг. 2. Множество устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, соединены посредством гирляндного соединения посредством кабеля 71 связи.
Последовательность, в которой информация (данные) передается между множеством устройств 100 отображения видео, которые соединены посредством гирляндного соединения, в дальнейшем также называется "последовательностью передачи". То есть, для множества устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, задается последовательность (последовательность передачи), в которой информация (данные) передается между множеством устройств 100 отображения видео через гирляндное соединение.
Связь согласно последовательности передачи, описанной выше, в дальнейшем также называется "гирляндной связью". При гирляндной связи, информация (данные) передается согласно последовательности передачи между множеством устройств 100 отображения видео, которые соединены посредством гирляндного соединения. Например, при гирляндной связи, информация (данные) передается в указанном порядке устройств 100-1, 100-2, 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео. Кабель 71 связи является кабелем, выделенным для гирляндной связи.
Канал связи, образованный множеством устройств 100 отображения видео, соединенных посредством гирляндного соединения посредством кабеля 71 связи, в дальнейшем также называется "каналом SK связи". Канал SK связи является каналом связи, который следует за гирляндным соединением. Связь,
осуществляемая через канал SK связи, в дальнейшем также называется "связью SK".
Связь SK включает в себя связь в восходящем направлении и гирляндную связь. Связь в восходящем направлении является связью, которая следует последовательности, противоположной последовательности передачи, описанной выше. При связи в восходящем направлении, индивидуальные устройства 100 отображения видео передают информацию (данные) на внешнее устройство 5 управления. При связи в восходящем направлении, устройство 100-3 отображения видео, например, отправляет информацию (данные) на внешнее устройство 5 управления через кабель 70 управления, описанный ниже, и/или канал SK связи.
В частности, двенадцать устройств 100 отображения видео соединены посредством гирляндного соединения, так чтобы информация (данные) передавалась в указанном порядке устройств 100-1, 100-2, 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео. То есть, при гирляндной связи, информация (данные) передается согласно последовательности передачи между множеством устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения.
Номер, указывающий последовательность передачи в дальнейшем называется "последовательным номером n (n является натуральным числом)" или "последовательным номером". Последовательный номер n является порядком, в котором данные передаются между множеством устройств 100 отображения видео, включенных в многоэкранные устройства 1000 отображения. Последовательный номер n составляет 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, и 12 для устройств 100-1, 100-2, 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео, соответственно.
Устройство 100 отображения видео, имеющее заданный ему последовательный номер, который больше на 1, чем последовательный номер другого устройства 100 отображения видео, в дальнейшем также называется "последующим смежным устройством 100 отображения видео". Устройство 100 отображения видео, имеющее заданный ему последовательный номер, который меньше на 1, чем последовательный номер другого устройства 100 отображения видео в дальнейшем также называется "предыдущим смежным устройством 100 отображения видео".
Устройство 100 отображения видео, имеющее заданный ему последовательный номер, из множества устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, в дальнейшем также называется "оконечным устройством отображения видео". Оконечным устройством отображения видео является, например, устройство 100-12 отображения видео. Устройства 100 отображения видео, отличные от оконечного устройства отображения видео, из множества устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, в дальнейшем также называется "неоконечным устройством отображения видео".
Внешнее устройство 7 управления соединено с каждым из устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, посредством сетевого кабеля 72 через концентратор 6. Например, как показано на Фиг. 1, внешнее устройство 7 управления соединено по сети с каждым из устройств 100-1, 100-2, 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео посредством сетевого кабеля 72 через концентратор 6.
Таким образом, канал связи, поддерживаемый сетевым кабелем 72 и концентратором 6, образовывает сеть (в дальнейшем также называемую "сетью NW"). Сетью NW является, например, LAN. Концентратор 6 является коммутирующим концентратором, который ретранслирует данные при связи, поддерживаемой сетью.
Канал связи, образующий сеть NW, в дальнейшем также называется "каналом NK связи". Множество устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, соединены с внешним окружением (внешним устройством 7 управления), так чтобы образовать сеть NW с использованием канала NK связи, отдельного от канала SK связи, следуя гирляндному соединению.
Связь, поддерживаемая каналом NK связи, в дальнейшем также называется "связью по сети". При связи по сети, внешнее устройство 7 управления, например, осуществляет связь с каждым из устройств 100 отображения видео через сетевой кабель 72 и концентратор 6.
Устройством 100 отображения видео является жидкокристаллический дисплей (LCD). Устройство 100 отображения видео не ограничивается LCD и может быть рирпроекционным устройством отображения. Рирпроекционное устройство отображения предусматривает отображение посредством проецирования видео на экране с задней поверхности экрана. Индивидуальные устройства 100 отображения видео, включенные в многоэкранное устройство 1000 отображения, отображают видео на основе видеосигналов, введенных извне.
Каждое из устройств 100 отображения видео имеет прямоугольную параллелепипедную форму. Как показано на Фиг. 2, индивидуальные устройства 100 отображения видео скомпонованы в матрицу в плоскости X-Y. Индивидуальные устройства 100 отображения видео необязательно имеют прямоугольную параллелепипедную форму и могут иметь другую форму, которая обеспечивает возможность компоновки индивидуальных устройств 100 отображения видео в матрицу.
Устройства 100-1, 100-2, 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео включают в себя экраны 10-1, 10-2, 10-3, 10-4, 10-5, 10-6, 10-7, 10-8, 10-9, 10-10, 10-11 и 10-12, соответственно.
Многоэкранное устройство 1000 отображения включает в себя полиэкран 10A, показанный на Фиг. 3. Полиэкран 10A параллелен плоскости X-Y. Как показано на Фиг. 3, полиэкран 10A является экраном, включающим в себя экраны 10-1, 10-2, 10-3, 10-4, 10-5, 10-6, 10-7, 10-8, 10-9, 10-10, 10-11 и 10-12, которые скомпонованы в матрицу. Полиэкран 10A имеет прямоугольную форму.
Каждый из экранов 10-1, 10-2, 10-3, 10-4, 10-5, 10-6, 10-7, 10-8, 10-9, 10-10, 10-11 и 10-12 в дальнейшем также называется "экраном 10". Полиэкран 10A включает в себя множество экранов 10 множества устройств 100 отображения видео, скомпонованных в матрицу. Экран 10 является экраном для отображения видео. Экран 10 является, например, листом стекла или экраном. Число экранов 10, включенных в полиэкран 10A, не ограничивается и может быть любым значением от двух до одиннадцати, тринадцати, или более.
Экран 10 индивидуального устройства 100 отображения видео, например, размещен на всей передней поверхности устройства 100 отображения видео. Таким образом, полиэкран 10A на Фиг. 3 имеет такую же форму, как плоскость X-Y многоэкранного устройства 1000 отображения на Фиг. 2.
Многоэкранное устройство 1000 отображения включает в себя множество устройств 100 отображения видео, скомпонованных в матрицу, так что экраны 10 множества устройств 100 отображения видео образуют полиэкран 10A, имеющий прямоугольную форму. Индивидуальные устройства 100 отображения видео отображают видео на экранах 10, в силу чего многоэкранное устройство 1000 отображения отображает видео на полиэкране 10A.
Нижеследующее описывает конфигурацию устройств 100 отображения видео. Фиг. 4 является блок-схемой, иллюстрирующей конфигурацию устройства 100 отображения видео согласно первому предпочтительному варианту осуществления настоящего изобретения. Фиг. 4 также показывает устройство-видеоисточник 4 и внешнее устройство 5 управления, которые не включены в устройство 100 отображения видео.
Устройство 100 отображения видео включает в себя блок 20 управления, запоминающий блок 32, контакт 34 внешнего управления, входной контакт 35a, выходной контакт 35b, блок 33 обработки связи, схему 37 ввода видео, блок 38 обработки отображения и блок 40 отображения.
Блок 20 управления управляет каждым блоком (такими как блок 33 обработки связи и блок 38 обработки отображения) устройства 100 отображения видео. Блоком 20 управления является, например, центральный процессор (CPU). Блок 20 управления включает в себя блок 21 вычисления и блок 22 задания. Блок 21 вычисления, который будет подробно описан позднее, выполняет различные виды вычисления. Блок 22 задания, который будет подробно описан позднее, задает различные виды информации.
Блок 21 вычисления и блок 22 задания, включенные в блок 20 управления, полностью или частично могут быть сконфигурированы с помощью аппаратных средств, таких как большая интегральная схема (LSI). Блок 21 вычисления и блок 22 задания полностью или частично могут быть программным модулем, исполняемым процессором, таким как CPU.
Входной контакт 35a является входным контактом для приема данных (информации) при гирляндной связи, описанной выше. Выходной контакт 35b является контактом для отправки данных (информации) при гирляндной связи. Каждый входной контакт 35a и выходной контакт 35b, в некоторых случаях, используется для приема и отправки данных (информации) для связи, отличной от гирляндной связи.
Как описано выше, множество устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, соединены посредством гирляндного соединения посредством кабеля 71 связи. В частности, выходной контакт 35b устройства 100 отображения видео, имеющего последовательный номер n, соединен с входным контактом 35a устройства 100 отображения видео, имеющего последовательный номер (n+1), посредством кабеля 71 связи.
В качестве примера, выходной контакт 35b устройства 100-1 отображения видео соединен с входным контактом 35a устройства 100-2 отображения видео посредством кабеля 71 связи. В качестве другого примера, выходной контакт 35b устройства 100-2 отображения видео соединен с входным контактом 35a устройства 100-3 отображения видео посредством кабеля 71 связи.
Устройство 100 отображения видео, которое идет первым в последовательности передачи из множества устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, в дальнейшем также называется "опорным устройством отображения видео" или "ведущим устройством". Устройство 100-1 отображения видео является опорным устройством отображения видео (ведущим устройством).
Устройства 100 отображения видео, отличные от ведущего устройства, из множества устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, в дальнейшем также называются "ведомыми устройствами". Например, устройства 100-2, 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео, показанные на Фиг. 1, являются ведомыми устройствами. То есть, многоэкранное устройство 1000 отображения включает в себя одно ведущее устройство и по меньшей мере одно ведомое устройство.
Контакт 34 внешнего управления ведущего устройства включает в себя контакт (в дальнейшем также называемый "контактом связи управления"), используемый при связи с внешним устройством 5 управления. Контакт связи управления (контакт 34 внешнего управления) ведущего устройства соединен с внешним устройством 5 управления посредством кабеля 70 управления. Таким образом, ведущее устройство соединено с внешним устройством 5 управления посредством кабеля 70 управления.
Контакты 34 внешнего управления индивидуальных устройств 100 отображения видео включают в себя контакты (в дальнейшем также называемые "сетевыми контактами"), используемые при связи по сети с внешним устройством 7 управления. Сетевые контакты (контакты 34 внешнего управления) соединены с внешним устройством 7 управления (не показано) посредством сетевого кабеля 72 через концентратор 6.
Устройства 100 отображения видео имеют, в качестве режимов функционирования для связи, обычный режим и режим задания идентификационной информации. Обычный режим является режимом, в котором устройства 100 отображения видео отправляют данные (информацию) согласно
последовательности передачи, описанной выше. Режим задания идентификационной информации, который будет подробно описан позднее, является режимом для задания идентификационного номера, описанного ниже, и/или идентификационного адреса, описанного ниже, являющихся идентификационной информацией.
Устройства 100 отображения видео имеют режим ввода информации для осуществления ввода информации. Режим ввода информации включается или отключается устройствами 100 отображения видео. Устройства 100 отображения видео с режимом ввода информации во включенном состоянии способны принимать ввод информации извне.
Блок 33 обработки связи управляет различными видами связи. Блок 33 обработки связи имеет обычное состояние и состояние приостановки пересылки в восходящем направлении в качестве состояния для управления связью.
Для связи по сети, описанной выше, блок 33 обработки связи постоянно задают в обычное состояние. При связи по сети, блок 33 обработки связи отправляет данные, принятые контактом 34 внешнего управления, в блок 20 управления.
Для связи SK, описанной выше, блок 33 обработки связи выполняет нижеследующую обработку. В частности, находясь в обычном состоянии, блок 33 обработки связи ведущего устройства отправляет (пересылает) данные (сигнал), принятые контактом 34 внешнего управления, на выходной контакт 35b. Данные (сигнал), отправленные из выходного контакта 35b ведущего устройства, отправляются на видеодисплей 100 (ведомое устройство), идущий вторым в последовательности передачи.
Находясь в обычном состоянии, блок 33 обработки связи индивидуального ведомого устройства отправляет (пересылает) данные (сигнал), принятые входным контактом 35a, на выходной контакт 35b. Данные, отправленные на выходной контакт 35a, отправляются в последующее устройство 100 отображения видео (ведомое устройство), смежное для релевантного ведомого устройства.
Находясь в обычном состоянии, блок 33 обработки связи индивидуального ведомого устройства отправляет (пересылает) данные, принятые выходным контактом 35b, на входной контакт 35a. Данные, отправленные на входной контакт 35a, отправляются в предыдущее устройство 100 отображения видео (ведущее устройство или ведомое устройство), смежное для релевантного ведомого устройства.
Находясь в обычном состоянии, блок 33 обработки связи ведущего устройства отправляет, в блок 20 управления, данные, принятые контактом 34 внешнего управления, входным контактом 35a или выходным контактом 35b. Блок 33 обработки связи в обычном состоянии отправляет данные (сигнал), принятые из блока 20 управления, в контакт 34 внешнего управления, входной контакт 35a или выходной контакт 35b в соответствии с пунктом назначения (целью доставки) данных. Пунктом назначения данных является, например, внешнее устройство 5 управления, внешнее устройство 7 управления или другое устройство 100 отображения видео. Блок 33 обработки связи функционирует как блок переключения связи, который изменяет партнера по связи в зависимости от обстоятельств.
Находясь в обычном состоянии, блок 33 обработки связи индивидуального ведомого устройства отправляет, в блок 20 управления, данные, принятые входным контактом 35a или выходным контактом 35b. Блок 33 обработки связи в обычном состоянии отправляет данные (сигнал), принятые из блока 20 управления, на входной контакт 35a или выходной контакт 35b в соответствии с пунктом назначения релевантных данных.
Блок 33 обработки связи в состоянии приостановки пересылки в восходящем направлении отправляет данные, принятые выходным контактом 35b, только в блок 20 управления и не отправляет данные на входной контакт 35a. Блок 33 обработки связи в состоянии приостановки пересылки в восходящем направлении отправляет (пересылает) данные (сигнал), принятые входным контактом 35a, на выходной контакт 35b.
Схема 37 ввода видео принимает видеосигнал, выведенный устройством-видеоисточником 4, размещенном вне многоэкранного устройства 1000 отображения. Затем, схема 37 ввода видео выводит видеосигнал, преобразованный в цифровой сигнал, в блок 38 обработки отображения.
Блок 38 обработки отображения управляет блоком 40 отображения. В частности, блоком 38 обработки отображения является схема обработки изображений, которая подвергает изображение, указанное принятым видеосигналом, обработке изображений, включающей в себя регулирование качества изображения. Блок 38 обработки отображения также имеет функцию обработки изображений, включающую в себя отображение на экране дополнительной информации (OSD). Блок 38 обработки отображения преобразовывает видеосигнал, прошедший обработку изображений, в видеосигнал в формате, который может быть обработан блоком 40 отображения.
Блок 38 обработки отображения отправляет, по требованию, видеосигнал, указывающий изображение, включающее в себя информацию, такую как меню, наложенное на изображение, указанное видеосигналом, в блок 40 отображения в соответствии с командами от блока 20 управления.
Блок 40 отображения является устройством для отображения видео на экране 10 (не показано). Блок 40 отображения отображает на экране 10 изображение, указанное видеосигналом, принятым из блока 38 обработки отображения. Блоком 40 отображения является LCD-панель. Блок 40 отображения не ограничивается LCD-панелью и может быть устройством, использующим другую систему для отображения изображения. Блок 40 отображения, который может быть рирпроекционным устройством отображения, может быть, например, устройством отображения для проецирования видео на экран 10.
Как описано выше, внешнее устройство 7 управления соединено с каждым из устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, посредством сетевого кабеля 72 через концентратор 6. То есть, внешнее устройство 7 управления и индивидуальные устройства 100 отображения видео соединены так, чтобы образовывать сеть NW, описанную выше.
Индивидуальные устройства 100 отображения видео должны иметь заданные им отличительные идентификационные номера, для того, чтобы обеспечить внешнему устройству 5 управления возможность индивидуального управления заданным одним из устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения. Идентификационные номера являются идентификационными номерами (ID) для идентифицирования индивидуальных устройств 100 отображения видео. Идентификационный номер в дальнейшем также называется "идентификационным номером i".
Индивидуальные устройства 100 отображения видео должны иметь заданную им отличительную идентификационную информацию, для того, чтобы обеспечить внешнему устройству 7 управления возможность индивидуального управления заданным одним из устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения. Идентификационной информацией является идентификационный адрес для идентифицирования индивидуальных устройств 100 отображения видео в сети NW. Идентификационный адрес будет подробно описан позднее.
Предполагается, что многоэкранное устройство 1000 отображения выполняет обработку по увеличению отображения. Например, предполагается, что обработка по увеличению отображения предусматривает обработку отображения изображения G10, показанного в части (a) на Фиг. 5, на всем полиэкране 10A. Другими словами, предполагается, что многоэкранное устройство 1000 отображения выполняет обработку по предоставлению увеличенного отображения изображения G10. В этом случае, одинаковое изображение G10 отправляется на индивидуальные устройства 100 отображения видео. Каждое из устройств 100 отображения видео предоставляет увеличенное отображение соответствующей целевой области изображения G10. Например, устройство 100-1 отображения видео увеличивает изображение в области R10 из изображения G10 и отображает ее на экране 10-1 (см. часть (b) на Фиг. 5).
Для обработки по увеличению отображения, информация MJ матрицы (информация KJ компоновки, описанная ниже), последовательный номер, описанный выше, координаты P и подобное задаются заранее для индивидуальных устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения. Информация MJ матрицы является информацией о матрице для точного определения расположений индивидуальных устройств 100 отображения видео на полиэкране 10A.
Матрица для точного определения расположений индивидуальных устройств 100 отображения видео на полиэкране 10A в дальнейшем также называется "матрицей MX". То есть, матрица MX является матрицей, соответствующей множеству устройств 100 отображения видео, скомпонованных в матрицу, так чтобы образовывать многоэкранное устройство 1000 отображения. Например, со ссылкой на Фиг. 2, многоэкранное устройство 1000 отображения включает в себя двенадцать устройств 100 отображения видео, скомпонованных в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами. Информация MJ матрицы включает в себя число рядов rw (rw является натуральным числом) и число столбцов (cl является натуральным числом) матрицы MX.
Число устройств 100 отображения видео в горизонтальном направлении (направлении оси X) в многоэкранном устройстве 1000 отображения, включающем в себя множество устройств 100 отображения видео, скомпонованных в матрицу, в дальнейшем также называется "горизонтальным числом Hm". Hm является натуральным числом. Горизонтальное число Hm равняется числу столбцов cl.
Число устройств 100 отображения видео в вертикальном направлении (направлении оси Y) в многоэкранном устройстве 1000 отображения, включающем в себя множество устройств 100 отображения видео, скомпонованных в матрицу, в дальнейшем также называется "вертикальным числом Hm". Vm является натуральным числом. Вертикальное число Vm равняется числу рядов rw. Например, в конфигурации, показанной на Фиг. 2, горизонтальное число Hm составляет 4, и вертикальное число Vm составляет 3. Информация KJ компоновки состоит из горизонтального числа Hm и вертикального числа Vm.
Информация KJ компоновки является информацией для указания конфигурации компоновки устройств 100 отображения видео. В частности, информация KJ компоновки является информацией для точного определения конфигурации компоновки множества устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения. Как описано выше, горизонтальное число Hm равняется числу столбцов cl, и вертикальное число Vm равняется числу рядов rw. То есть, информация KJ компоновки состоит из числа рядов rw и числа столбцов cl матрицы MX.
Координаты P являются координатами индивидуального устройства 100 отображения видео на полиэкране 10A. Координаты P выражены как (HL (натуральное число), VL (натуральное число)). По отношению к координатам P, "HL" указывает координату (расположение) индивидуального устройства 100 отображения видео в горизонтальном направлении (направлении оси X) на полиэкране 10A. "VL" указывает координату (расположение) устройства 100 отображения видео в вертикальном направлении (направлении оси Y) на полиэкране 10A. Например, со ссылкой на Фиг. 3, устройство 100-3 отображения видео имеет координаты P (3, 1).
Индивидуальное устройство 100 отображения видео предоставляет, на всем экране 10, увеличенное отображение соответствующей целевой области изображения G10 в соответствии, например, с информацией KJ компоновки (информацией MJ матрицы), последовательным номером и координатами P, описанными выше. В качестве примера, предполагается, что горизонтальное число Hm=4, вертикальное число Vm=3 и координаты P (1, 1) заданы для устройства 100-1 отображения видео. В этом случае, как показано в части (b) на Фиг. 5, устройство 100-1 отображения видео предоставляет, на экране 10-1, увеличенное отображение изображения в области R10, показанной в части (a) на Фиг. 5.
В этом предпочтительном варианте осуществления, индивидуальные устройства 100 отображения видео, включенные в многоэкранное устройство 1000 отображения проходят обработку (в дальнейшем также называемую "обработкой соответствия задания идентификационной информации") для задания идентификационного номера i, являющегося идентификационной информацией, и координат P. Обработка, выполняемая внешним устройством 5 управления при обработке соответствия задания идентификационной информации, в дальнейшем также называется "обработкой BX соответствия задания идентификационной информации". Как описано выше, внешнее устройство 5 управления соединено с контактом 34 внешнего управления устройства 100-1 отображения видео, включающего в себя экран 10-1 на Фиг. 3, посредством кабеля 70 управления.
Фиг. 6 является схемой последовательности операций обработки BX соответствия задания идентификационной информации. Сначала, обработка на этапе S110 выполняется при обработке BX соответствия задания идентификационной информации.
На этапе S110 выполняется обработка по включению режима ввода информации. При обработке по включению режима ввода информации, внешнее устройство 5 управления отправляет команду включения режима ввода в ведущее устройство. Команда включения режима ввода является командой для включения режима ввода информации. Ведущее устройство, которое приняло команду включения режима ввода, включает режим ввода информации. Таким образом, ведущее устройство может принять ввод информации извне.
На этапе S120 выполняется обработка по вводу информации компоновки для осуществления ввода информации KJ компоновки, описанной выше. При обработке по вводу информации компоновки, оператор вводит, в качестве информации KJ компоновки, горизонтальное число Hm и вертикальное число Vm во внешнее устройство 5 управления с использованием операционного интерфейса.
Затем, внешнее устройство 5 управления отправляет, в ведущее устройство, информацию KJ компоновки, указывающую горизонтальное число Hm и вертикальное число Vm, которые были введены. Только ведущее устройство задается в качестве цели доставки информации KJ компоновки. Таким образом, блок 33 обработки связи ведущего устройства принимает информацию KJ компоновки от контакта 34 внешнего управления. Затем, блок 33 обработки связи отправляет информацию KJ компоновки только в блок 20 управления. Блок 20 управления предписывает запоминающему блоку 32 сохранить информацию KJ компоновки (горизонтальное число Hm и вертикальное число Vm).
Кабель 71 связи, который соединяет любые два устройства 100 отображения видео, смежные друг другу в горизонтальном направлении (направлении оси X), в дальнейшем также называется "кабелем горизонтального соединения". Со ссылкой на Фиг. 1, кабель горизонтального соединения является, например, кабелем 71 связи, который соединяет устройство 100-1 отображения видео с устройством 100-2 отображения видео. Кабель 71 связи, который соединяет любые два устройства 100 отображения видео, смежные друг с другом в вертикальном направлении (направлении оси Y), в дальнейшем также называется "кабелем вертикального соединения". Со ссылкой на Фиг. 1, кабель вертикального соединения является, например, кабелем 71 связи, который соединяет устройство 100-4 отображения видео с устройством 100-5 отображения видео.
На этапе S130 выполняется обработка по вводу информации конфигурации проводки для осуществления ввода информации W конфигурации проводки. Информация W конфигурации проводки является информацией, точно определяющей конфигурацию индивидуальных кабелей 71 связи, которые соединяют индивидуальные устройства 100 отображения видео. Конфигурация индивидуальных кабелей 71 связи, которые соединяют индивидуальные устройства 100 отображения видео, в дальнейшем также называется "конфигурацией кабельного соединения".
Конфигурация, в которой индивидуальные устройства 100 отображения видео, соответствующие каждому ряду матрицы MX, соответствующей множеству устройств 100 отображения видео, скомпонованных в матрицу, соединены друг с другом посредством кабелей горизонтального соединения, в дальнейшем также называется "конфигурацией горизонтального соединения". Конфигурация горизонтального соединения является, например, конфигурацией кабельного соединения, показанной на Фиг. 1. В конфигурации горизонтального соединения, индивидуальные кабели 71 связи соединяют индивидуальные устройства 100 отображения видео, соответствующие каждому ряду матрицы MX в горизонтальном направлении (направлении оси X).
В конфигурации горизонтального соединения, устройство 100 отображения видео, имеющее наибольший последовательный номер из числа устройств 100 отображения видео, соответствующих каждому ряду матрицы MX, соединено с другим устройством 100 отображения видео, размещенного рядом в направлении Y, посредством кабеля 71 связи, являющегося кабелем вертикального соединения. Например, со ссылкой на Фиг. 1, устройство 100-4 отображения видео, имеющее последовательный номер 4, из числа устройств 100 отображения видео, соответствующих первому ряду матрицы MX, соединено с устройством 100-5 отображения видео, смежным с устройством 100-4 отображения видео в направлении Y, посредством кабеля 71 связи, являющегося кабелем вертикального соединения.
В этом предпочтительном варианте осуществления, опорное устройство отображения видео (ведущее устройство) размещается в любом одном из четырех углов полиэкрана 10A. Четыре угла включают в себя верхний левый конец LT, верхний правый конец RT, нижний левый конец LB и левый правый конец RB на Фиг. 7. Например, опорное устройство отображения видео (устройство 100-1 отображения видео) на Фиг. 2 размещается в верхнем левом конце LT.
В конфигурации горизонтального соединения, кабели вертикального соединения размещаются в разных расположениях в зависимости от расположения опорного устройства отображения видео (ведущего устройства). В частности, в конфигурации горизонтального соединения, кабели вертикального соединения размещаются в разных расположениях в зависимости от расположения опорного устройства отображения видео (ведущее устройство), которое размещается в верхнем левом конце LT, верхнем правом конце RT, нижним левом конце LB или нижнем правом конце RB.
В качестве примера, предполагается, что опорное устройство отображения видео (ведущее устройство) из числа устройств 100 отображения видео в конфигурации кабельного соединения на Фиг. 1 размещается в верхнем левом конце LT. В этом случае, например, кабель вертикального соединения располагается так, чтобы соединять устройство 100-4 отображения видео в верхнем правом конце RT с устройством 100-5 отображения видео, смежным с устройством 100-4 отображения видео в направлении Y. В конфигурации горизонтального соединения по вышеуказанному случаю, индивидуальные устройства 100 отображения видео соединены друг с другом посредством кабеля 71 связи, так чтобы данные передавались в последовательности передачи, указанной стрелками в части (a) на Фиг. 8.
В качестве примера, предполагается, что опорное устройство отображения видео (ведущее устройство) размещается в верхнем правом конце RT в конфигурации горизонтального соединения. В этом случае, например, кабель вертикального соединения располагается так, чтобы соединять устройство 100 отображения видео в верхнем левом конце LT с другим устройством 100 отображения видео, размещенным рядом в направлении Y.
Конфигурация, в которой индивидуальные устройства 100 отображения видео, соответствующие каждому столбцу матрицы MX, соответствующей множеству устройств 100 отображения видео, скомпонованных в матрицу, соединены друг с другом посредством кабеля вертикального соединения, в дальнейшем также называется "конфигурацией вертикального соединения". Конфигурация вертикального соединения является, например, конфигурацией кабельного соединения, показанной на Фиг. 9. В конфигурации вертикального соединения, индивидуальные кабели 71 связи соединяют индивидуальные устройства 100 отображения видео, соответствующие каждому столбцу матрицы MX в вертикальном направлении (направлении оси X).
В конфигурации вертикального соединения, устройство 100 отображения видео, имеющее наибольший последовательный номер из числа устройств 100 отображения видео, соответствующих каждому столбцу матрицы MX, соединено с другим устройством 100 отображения видео, размещенного рядом в направлении X, посредством кабеля 71 связи, являющегося кабелем горизонтального соединения. Например, со ссылкой на Фиг. 9, устройство 100-3 отображения видео, имеющее последовательный номер 3, из числа устройств 100 отображения видео, соответствующих первому столбцу матрицы MX, соединено с устройством 100-4 отображения видео, смежным с устройством 100-3 отображения видео в направлении X, посредством кабеля 71 связи, являющегося кабелем горизонтального соединения.
В конфигурации вертикального соединения, кабели горизонтального соединения размещаются в разных расположениях в зависимости от расположения опорного устройства отображения видео (ведущего устройства). В частности, в конфигурации вертикального соединения, кабели горизонтального соединения размещаются в разных расположениях в зависимости от расположения опорного устройства отображения видео (ведущее устройство), которое размещается в верхнем левом конце LT, верхнем правом конце RT, нижним левом конце LB или нижнем правом конце RB.
В качестве примера, предполагается, что опорное устройство отображения видео (ведущее устройство) из числа устройств 100 отображения видео в конфигурации кабельного соединения на Фиг. 9 размещается в верхнем левом конце LT. В этом случае, например, кабель горизонтального соединения располагается так, чтобы соединять устройство 100-3 отображения видео в нижнем левом конце LB с устройством 100-4 отображения видео, смежным с устройством 100-3 отображения видео в направлении X. В конфигурации вертикального соединения по вышеуказанному случаю, индивидуальные устройства 100 отображения видео соединены друг с другом посредством кабеля 71 связи, так чтобы данные передавались в последовательности передачи, указанной стрелками в части (b) на Фиг. 8.
В качестве примера, предполагается, что опорное устройство отображения видео (ведущее устройство) размещается в нижнем левом конце LB в конфигурации вертикального соединения. В этом случае, например, кабель горизонтального соединения располагается так, чтобы соединять устройство 100 отображения видео в верхнем левом конце LT с другим устройством 100 отображения видео, размещенным рядом в направлении X.
Обращаясь снова к Фиг. 6, при обработке по вводу конфигурации проводки на этапе S130, оператор вводит информацию W конфигурации проводки во внешнее устройство 5 управления с использованием операционного интерфейса. Информацией W конфигурацией проводки является, например, информация, точно определяющая конфигурацию горизонтального соединения или конфигурацию вертикального соединения, описанные выше.
Затем, внешнее устройство 5 управления отправляет, в ведущее устройство, информацию W конфигурации проводки, которая была введена. Только ведущее устройство задается в качестве цели доставки информации W конфигурации проводки. Таким образом, блок 33 обработки связи ведущего устройства принимает информацию W конфигурации проводки от контакта 34 внешнего управления. Затем, блок 33 обработки связи отправляет информацию W конфигурации проводки только в блок 20 управления. Блок 20 управления предписывает запоминающему блоку 32 сохранить информацию W конфигурации проводки.
На этапе S140 выполняется обработка по вводу информации расположения для осуществления ввода информации LJ расположения. Информация LJ расположения является информацией, указывающей расположение ведущего устройства (опорного устройства отображения видео). Ведущее устройство (опорное устройство отображения видео) размещается в любом одном из верхнего левого конца LT, верхнего правого конца RT, нижнего левого конца LB и нижнего правого конца RB, упомянутых выше.
При обработке ввода информации расположения, оператор вводит информацию LJ расположения во внешнее устройство 5 управления с использованием операционного интерфейса. Информация LJ расположения является информацией для точного определения одного из верхнего левого конца LT, верхнего правого конца RT, нижнего левого конца LB и нижнего правого конца RB. В случае, когда ведущее устройство (опорное устройство отображения видео) размещается в верхнем левом конце LT, информация LJ расположения, которая должна быть введена, указывает верхний левый конец LT.
Затем, внешнее устройство 5 управления отправляет, в ведущее устройство, информацию LJ расположения, которая была введена. Только ведущее устройство задается в качестве цели доставки информация LJ расположения. Таким образом, блок 33 обработки связи ведущего устройства принимает информацию LJ расположения от контакта 34 внешнего управления. Затем, блок 33 обработки связи отправляет информацию LJ расположения только в блок 20 управления. Блок 20 управления предписывает запоминающему блоку 32 сохранить информацию LJ расположения.
Правило для задания идентификационных номеров i, являющихся идентификационной информацией для индивидуальных устройств 100 отображения видео, в дальнейшем также называется "правилом B задания идентификационной информации" или "правилом задания идентификационной информации". Правилом задания идентификационной информации В является предварительно определенное правило для задания идентификационного номера i, являющегося идентификационной информацией для каждое из устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения. Правило задания идентификационной информации В задается, чтобы упростить оператору (человеку) распознавание идентификационного номера i.
На этапе S150 выполняется обработка по вводу информации правила задания идентификационной информации для осуществления ввода информации правила задания идентификационной информации Ft. Информация правила задания идентификационной информации R является информацией для точного определения правила B задания идентификационной информации.
Устройство 100 отображения видео, для которого должен быть задан идентификационный номер i, в дальнейшем также называется "целевым для задания устройством отображения видео". Устройство 100 отображения видео, соответствующее самому правому столбцу матрицы MX, из числа устройств 100 отображения видео, соответствующих каждому ряду матрицы MX кроме нижнего ряда, в дальнейшем также называется "самым правым устройством отображения видео". Например, со ссылкой на Фиг. 1, самым правым устройством отображения видео, соответствующим первому ряду матрицы MX, является устройство 100-4 отображения видео. Устройство 100 отображения видео, соответствующее самому левому столбцу матрицы MX, из числа устройств 100 отображения видео, соответствующих каждому ряду матрицы MX кроме первого ряда, в дальнейшем также называется "самым левым устройством отображения видео".
Правило задания идентификационной информации для задания идентификационных номеров i, как показано в части (a) на Фиг. 10, для индивидуальных устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, в дальнейшем также называется "правилом горизонтального задания".
Расположение ведущего устройства (опорного устройства отображения видео) на полиэкране 10A в дальнейшем также называется "опорным расположением BL". Опорным расположением BL является, например, любой из верхнего левого конца LT, верхнего правого конца RT, нижнего левого конца LB и нижнего правого конца RB на Фиг. 7.
Растровое сканирование, в котором последовательность сканирования, начинающегося с опорного расположения BL, изменяется в направлении (направлении оси X), горизонтальном к полиэкрану 10A, в дальнейшем также называется "горизонтальным растровым сканированием".
В качестве примера, предполагается, что опорным расположением BL является верхний левый конец LT. В этом случае, правило горизонтального задания, описанное выше, задается на основе последовательности согласно горизонтальному растровому сканированию. То есть, согласно правилу горизонтального задания, значение идентификационного номера i, который должен быть задан, увеличивается на 1, каждый раз, когда целевое для задания устройство отображения видео сдвигается от одного из устройств 100 отображения видео, соответствующих каждому ряду матрицы MX, к другому устройству 100 отображения видео, находящемуся непосредственно справа.
В частности, согласно правилу горизонтального задания, значение идентификационного номера i, заданного для устройства 100 отображения видео в (HL+1)-м столбце из числа устройств 100 отображения видео, соответствующих каждому ряду матрицы MX, больше на один, чем значение идентификационного номера i, заданного для устройства 100 отображения видео в HL-м столбце. Например, как показано в части (a) на Фиг. 10, значение идентификационного номера i, заданного для устройства 100-2 отображения видео во втором столбце из числа устройств 100 отображения видео, соответствующих первому ряду матрицы MX на Фиг. 1, составляет 2, что больше на один, чем идентификационный номер i (1), заданный для устройства 100-1 отображения видео в первом столбце.
Согласно правилу горизонтального задания, целевым для задания устройством отображения видео, которому должен быть задан идентификационный номер i вслед за самым правым устройством отображения видео, является самое левое устройство отображения видео, соответствующее ряду, следующему за рядом матрицы MX, соответствующим релевантному самому правому устройству отображения видео. Например, согласно правилу горизонтального задания, целевым для задания устройством отображения видео, которому должен быть присвоен идентификационный номер i вслед за устройством 100-4 отображения видео, соответствующим первому ряду матрицы MX, является устройство 100-8 отображения видео, соответствующее второму ряду матрицы MX.
Устройство 100 отображения видео, соответствующее нижнему ряду матрицы MX из числа устройств 100 отображения видео, соответствующих каждому столбцу матрицы MX кроме самого правого столбца, в дальнейшем также называется "нижним устройством отображения видео". Например, со ссылкой на Фиг. 9, нижним устройством отображения видео, соответствующем первому столбцу матрицы MX, является устройство 100-3 отображения видео. Устройство 100 отображения видео, соответствующее верхнему ряду матрицы MX из числа устройств 100 отображения видео, соответствующих каждому столбцу матрицы MX кроме первого столбца, в дальнейшем также называется "верхним устройством отображения видео".
Правило задания идентификационной информации для задания идентификационных номеров i, как показано в части (b) на Фиг. 10, для индивидуальных устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, в дальнейшем также называется "правилом вертикального задания". Растровое сканирование, в котором последовательность сканирования, начинающегося с опорного расположения BL, изменяется в направлении, вертикальном к полиэкрану 10A, в дальнейшем также называется "вертикальным растровым сканированием".
В качестве примера, предполагается, что опорным расположением BL является верхний левый конец LT. В этом случае, правило вертикального задания задается на основе последовательности согласно вертикальному растровому сканированию. То есть, согласно правилу вертикального задания, значение идентификационного номера i, который должен быть задан, увеличивается на 1, каждый раз, когда целевое для задания устройство отображения видео сдвигается от одного из устройств 100 отображения видео, соответствующих каждому столбцу матрицы MX, к другому устройству 100 отображения видео, находящемуся непосредственно ниже.
В частности, согласно правилу вертикального задания, значение идентификационного номера i, заданного для устройства 100 отображения видео в (VL+1)-м ряду из числа устройств 100 отображения видео, соответствующих каждому столбцу матрицы MX, больше на один, чем значение идентификационного номера i, заданного для устройства 100 отображения видео в VL-м ряду. Например, со ссылкой на Фиг. 9, значение идентификационного номера i, заданного для устройства 100-2 отображения видео во втором ряду из числа устройств 100 отображения видео, соответствующих первому столбцу матрицы MX, составляет 2, что больше на один, чем идентификационный номер i (1), заданный для устройства 100-1 отображения видео в первом ряду.
Согласно правилу вертикального задания, целевым для задания устройством отображения видео,
которому должен быть задан идентификационный номер i вслед за нижним устройством отображения видео, является верхнее устройство отображения видео, соответствующее столбцу, следующему за столбцом матрицы MX, соответствующим вышеупомянутому нижнему устройству отображения видео. Например, согласно правилу вертикального задания, целевым для задания устройством отображения видео, которому должен быть присвоен идентификационный номер i вслед за устройством 100-3 отображения видео, соответствующим первому столбцу матрицы MX, является устройство 100-6 отображения видео, соответствующее второму столбцу матрицы MX.
Обращаясь к Фиг. 6, при обработке по вводу информации правила задания идентификационной информации на этапе S150, оператор вводит информацию правила задания идентификационной информации R во внешнее устройство 5 управления с использованием операционного интерфейса. Информация правила задания идентификационной информации R является информацией для точного определения, например, правила горизонтального задания или правила вертикального задания.
Затем, внешнее устройство 5 управления отправляет, в ведущее устройство, информацию правила задания идентификационной информации R, которая была введена. Только ведущее устройство задается в качестве цели доставки информации правила задания идентификационной информации R. Таким образом, блок 33 обработки связи ведущего устройства принимает информацию правила задания идентификационной информации R от контакта 34 внешнего управления. Затем, блок 33 обработки связи отправляет информацию правила задания идентификационной информации R только в блок 20 управления. Блок 20 управления предписывает запоминающему блоку 32 сохранить информацию правила задания идентификационной информации R.
На этапе S160 внешнее устройство 5 управления отправляет команду M выполнения задания идентификационной информации в ведущее устройство (устройство 100-1 отображения видео). Команда M выполнения задания идентификационной информации является командой для предписания ведущему устройству выполнять обработку (в дальнейшем также называемую "обработкой BM соответствия задания идентификационной информации") для задания идентификационного номера
i, являющегося идентификационной информацией. Только ведущее устройство является целью доставки команды M выполнения задания идентификационной информации. То есть, команда M выполнения задания идентификационной информации отправляется только в ведущее устройство.
Ведущее устройство выполняет обработку BM соответствия задания идентификационной информации после приема команды M выполнения задания идентификационной информации. В частности, блок 33 обработки связи ведущего устройства принимает команду M выполнения задания идентификационной информации от контакта 34 внешнего управления. Затем, блок 33 обработки связи отправляет команду M выполнения задания идентификационной информации только в блок 20 управления. Таким образом, блок 20 управления ведущего устройства принимает команду M выполнения задания идентификационной информации. Блок 20 управления выполняет обработку BM соответствия задания идентификационной информации в соответствии с командой M выполнения задания идентификационной информации.
Нижеследующее описывает обработку BM соответствия задания идентификационной информации. Фиг. 11 является схемой последовательности операций обработки BM соответствия задания идентификационной информации. Сначала, обработка на этапе S210 выполняется при обработке BM соответствия задания идентификационной информации.
На этапе S210 блок 21 вычисления (блок 20 управления) задает значение счетчика CT в значение "0". Счетчик CT является внутренним счетчиком, в котором числовые значения задаются для того, чтобы задавать идентификационную информацию. Счетчик CT в дальнейшем также просто называется "CT".
На этапе S220 выполняется обработка по вычислению координат. Подводя итог, при обработке по вычислению координат, блок 21 вычисления вычисляет координаты P (расположения) множества устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, на полиэкране 10A на основе информации компоновки
KJ и последовательности передачи, описанных выше. Немного более конкретно, блок 21 вычисления вычисляет координаты P на основе расположения ведущего устройства, являющегося опорным устройством отображения видео.
Фиг. 12 является схемой последовательности операций обработки по вычислению координат. Устройство 100 отображения видео, чьи координаты должны быть вычислены при обработке по вычислению координат, в дальнейшем также называется "целевым устройством PD". Нижеследующее сначала описывает обработку для вычисления координат ведущего устройства при обработке по вычислению координат. Сначала, обработка на этапе S221 выполняется при обработке по вычислению координат.
На этапе S221 определяется вид конфигурации кабельного соединения. В частности, блок 21 вычисления (блок 20 управления) определяет, является ли конфигурация кабельного соединения конфигурацией горизонтального соединения или конфигурацией вертикального соединения. Более конкретно, блок 21 вычисления определяет, является ли информация W конфигурации проводки, хранящейся в запоминающем блоке 32, информацией, точно определяющей конфигурацию горизонтального соединения, или информацией, точно определяющей конфигурацию вертикального соединения.
Если конфигурация кабельного соединения является конфигурацией горизонтального соединения, или эквивалентно, если информация W конфигурации проводки является информацией, точно определяющей конфигурацию горизонтального соединения, обработка переходит на этап S222A. Между тем, если конфигурация кабельного соединения является конфигурацией вертикального соединения, или эквивалентно, если информация W конфигурации проводки является информацией, точно определяющей конфигурацию вертикального соединения, обработка переходит на этап S222B.
Со ссылкой на Фиг. 13, направления в плоскости X-Y задаются как следует ниже. Часть (a) на Фиг. 13 показывает конфигурацию компоновки устройств 100 отображения видео в состоянии, когда ведущее устройство (опорное устройство отображения видео) размещается в верхнем левом конце LT. Часть (b) на Фиг. 13 показывает конфигурацию компоновки устройств 100 отображения видео в состоянии, когда ведущее устройство размещается в верхнем правом конце RT. Часть (c) на Фиг. 13 показывает конфигурацию компоновки устройств 100 отображения видео в состоянии, когда ведущее устройство размещается в нижнем левом конце LB. Часть (d) на Фиг. 13 показывает конфигурацию компоновки устройств 100 отображения видео в состоянии, когда ведущее устройство размещается в нижнем правом конце RB.
Устройство 100-2 отображения видео, которое идет вторым в последовательности передачи, в дальнейшем также называется "вторым устройством". Второе устройство соединено с ведущим устройством (опорным устройством отображения) посредством кабеля 71 связи.
Со ссылкой на часть (a) - часть (d) на Фиг. 13, направление X в плоскости X-Y задано как "направление +H". Направление -X в плоскости X-Y задано как "направление -H". Направление Y в плоскости X-Y задано как "направление +V". Направление -Y в плоскости X-Y задано как "направление -V".
Устройство 100 отображения видео, смежное с ведущим устройством (опорным устройством отображения видео) в горизонтальном направлении (направление оси X), в дальнейшем также называется "горизонтально смежным устройством". Устройство 100 отображения видео, смежное с ведущим устройством в вертикальном направлении (направление оси Y), в дальнейшем также называется "вертикально смежным устройством". Направление, стремящееся от ведущего устройства к горизонтально смежному устройству, в дальнейшем также называется "горизонтально смежным направлением". Направление, стремящееся от ведущего устройства к вертикально смежному устройству, в дальнейшем также называется "вертикально смежным направлением".
Горизонтально смежное направление и вертикально смежное направление задаются согласно расположению ведущего устройства. В качестве примера, предполагается, что ведущее устройство размещается в верхнем левом конце LT как показано в части (a) на Фиг. 13. Также, предполагается, что конфигурация кабельного соединения является конфигурацией горизонтального соединения.
В этом случае, как показано на Фиг. 2, горизонтально смежным устройством является устройство 100-2 отображения видео (второе устройство), и вертикально смежным устройством является устройство 100-8 отображения видео. Как показано в части (a) на Фиг. 13, горизонтально смежным направлением является направление +H, и вертикально смежным направлением является направление +V. Ведущее устройство соединено со вторым устройством посредством кабеля 71 связи, являющегося кабелем горизонтального соединения.
В качестве другого примера, предполагается, что ведущее устройство размещается в верхнем левом конце LT как показано в части (a) на Фиг. 13. Также, предполагается, что конфигурация кабельного соединения является конфигурацией вертикального соединения. В этом случае, как показано на Фиг. 9, горизонтально смежным устройством является устройство 100-6 отображения видео, и вертикально смежным устройством является устройство 100-2 отображения видео (второе устройство). Как показано в части (a) на Фиг. 13, ведущее устройство соединено со вторым устройством посредством кабеля 71 связи, являющегося кабелем вертикального соединения.
В качестве другого примера, предполагается, что ведущее устройство размещается в верхнем правом конце RT, как показано в части (b) на Фиг. 13. В этом случае, горизонтально смежным направлением является направление -H, и вертикально смежным направлением является направление +V.
В качестве другого примера, предполагается, что ведущее устройство размещается в нижнем левом конце LB, как показано в части (c) на Фиг. 13. В этом случае, горизонтально смежным направлением является направление +H, и вертикально смежным направлением является направление -V.
В качестве другого примера, предполагается, что ведущее устройство размещается в нижнем правом конце RB, как показано в части (d) на Фиг. 13. В этом случае, горизонтально смежным направлением является направление -H, и вертикально смежным направлением является направление -V.
На этапе S222A блок 21 вычисления (блок 20 управления) определяет, является ли соответствующий ряд рядом с нечетным номером или рядом с четным номером. Соответствующий ряд является рядом матрицы MX, соответствующим целевому устройству PD. Ряды с нечетными номерами ссылаются на ряды с нечетными номерами матрицы MX, при этом ее началом является расположение ведущего устройства (опорного устройства отображения видео). Ряды с четными номерами ссылаются на ряды с четными номерами матрицы MX, при этом ее началом является расположение ведущего устройства.
Отражено нижеследующее предварительное условие A1. При предварительном условии A1, в качестве примера, индивидуальные устройства 100 отображения видео скомпонованы как показано на Фиг. 2. При предварительном условии A1, целевым устройством PD является устройство 100-1 отображения видео. При предварительном условии A1, предполагается, что ведущее устройство размещается в верхнем левом конце LT.
При вышеупомянутом предварительном условии A1, первым рядом матрицы MX является верхний ряд матрицы, соответствующей конфигурации на Фиг. 2. То есть, первым рядом матрицы MX является ряд, соответствующий, например, устройствам 100-1 и 100-2 отображения видео. Ряд, соответствующий целевому устройству PD является первым рядом матрицы MX. Рядами с нечетными номерами матрицы MX, соответствующей предварительному условию A1, являются, например, ряд, соответствующий устройству 100-1 отображения видео, и ряд, соответствующий устройству 100-9 отображения видео. Рядом с четным номером матрицы MX, соответствующей предварительному условию A1, является, например, ряд, соответствующий устройству 100-8 отображения видео. Таким образом, рядом, соответствующим целевому устройству PD при предварительном условии A1, является ряд с нечетным номером.
Затем, отражено нижеследующее предварительное условие A2. При предварительном условии A2, как показано на Фиг. 7, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами. При предварительном условии A2, целевым устройством PD является устройство 100-1 отображения видео. При предварительном условии A2, ведущее устройство размещается в верхнем правом конце RT.
При вышеупомянутом предварительном условии A2, первым рядом матрицы MX является верхний ряд матрицы MX, соответствующей конфигурации на Фиг. 7. Ряд, соответствующий целевому устройству PD является первым рядом матрицы MX. Рядами с нечетными номерами матрицы MX, соответствующей предварительному условию A1, являются, например, ряд, соответствующий ведущему устройству, и ряд, соответствующий устройству 100 отображения видео, размещенному в нижнем левом конце LB. Рядом с четным номером матрицы MX, соответствующей предварительному условию A2, является, например, ряд, соответствующий устройству 100-8 отображения видео, смежному с ведущим устройством в направлении Y. Таким образом, при предварительном условии A2, рядом, соответствующим целевому устройству PD, является ряд с нечетным номером.
На этапе S222A является ли соответствующий ряд рядом с нечетным номером или рядом с четным номером вычисляется нижеследующим образом. В частности, блок 21 вычисления (блок 20 управления) определяет, является ли соответствующий ряд рядом с нечетным номером или ряд с четным номером, с использованием актуального значения счетчика CT и горизонтального числа Hm, хранящегося в запоминающем блоке 32.
Целочисленная часть значения, полученного посредством "CT/Hm" задается как "значение S определения". Hm является горизонтальным значением Hm. В качестве примера, предполагается, что CT составляет 0 и Hm составляет 4. В этом случае, значение S определения составляет 0. В качестве другого примера, предполагается, что CT составляет 5 и Hm составляет 4. В этом случае, значение S определения получается посредством "5/4=1,25", составляя 1. То есть, значение S определения составляет 1, что является целочисленной частью 1,25.
Остаток выражения "значение S определения/2" задается как "значение Sa определения ряда". В качестве примера, предполагается, что значение S определения составляет 0. В этом случае, значение Sa определения ряда получается посредством "0/2", составляя 0. То есть, значение Sa определения ряда составляет 0, соответствуя остатку деления "0/2". В качестве другого примера, предполагается, что значение S определения составляет 1. В этом случае, значение Sa определения ряда получается посредством "1/2", составляя 1. То есть, значение Sa определения ряда составляет 1, соответствуя остатку деления "1/2". В качестве еще одного примера, предполагается, что значение S определения составляет 2. В этом случае, значение Sa определения ряда получается посредством "2/2", составляя 0. То есть, значение Sa определения ряда составляет 0, соответствуя остатку деления "2/2".
В случае, когда значение Sa определения ряда составляет 0, блок 21 вычисления определяет, что ряд, соответствующий целевому устройству PD, является рядом с нечетным номером. В этом случае, обработка переходит на этап S223A. В случае, когда значение Sa определения ряда составляет 1, блок 21 вычисления определяет, что ряд, соответствующий целевому устройству PD, является рядом с четным номером. В этом случае, обработка переходит на этап S223B.
На этапе S223A блок 21 вычисления (блок 20 управления) определяет, является ли горизонтально смежным направлением направление +H или направление -H. Горизонтально смежное направление задается согласно расположению ведущего устройства, как описано выше со ссылкой на Фиг. 13. В случае, когда горизонтально смежным направлением является направление +H, обработка переходит на этап S224A. Между тем, в случае, когда горизонтально смежным направлением является направление -H, обработка переходит на этап S224B.
Остаток выражения "CT/Hm" в дальнейшем задан как "MA". В качестве примера, предполагается, что CT составляет 0 и Hm составляет 4. В этом случае, MA получается посредством "0/4", составляя 0. То есть, MA составляет 0, соответствуя остатку деления "0/4". В качестве другого примера, предполагается, что CT составляет 5 и Hm составляет 4. В этом случае, MA получается посредством "5/4", составляя 1. То есть, MA составляет 1, соответствуя остатку деления "5/4".
На этапе S224A блок 21 вычисления выполняет обработку H1 по вычислению для вычисления координат HL. При обработке H1 по вычислению, блок 21 вычисления вычисляет координату HL посредством нижеследующего выражения (1).
HL=MA+1 ••• Выражение (1)
На этапе S224B блок 21 вычисления выполняет обработку H2 по вычислению для вычисления координат HL. При обработке H2 по вычислению, блок 21 вычисления вычисляет координату HL посредством нижеследующего выражения (2).
HL=Hm - MA ••• Выражение (2)
В случае, когда соответствующий ряд является рядом с четным номером на вышеописанном этапе S222A, обработка переходит на этап S223B.
На этапе S223B выполняется такая же обработка как обработка на этапе S223A. В случае, когда горизонтально смежным направлением является направление +H, обработка переходит на этап S224C. Между тем, в случае, когда горизонтально смежным направлением является направление -H, обработка переходит на этап S224D.
На этапе S224C блок 21 вычисления выполняет обработку H3 по вычислению для вычисления координат HL. При обработке H3 по вычислению, блок 21 вычисления вычисляет координату HL посредством вышеописанного выражения (2).
На этапе S224D блок 21 вычисления выполняет обработку H4 по вычислению для вычисления координат HL. При обработке H4 по вычислению, блок 21 вычисления вычисляет координату HL посредством вышеописанного выражения (1).
На этапе S225A блок 21 вычисления (блок 20 управления) определяет, является ли вертикально смежным направлением направление +V или направление -V. Вертикально смежное направление задается согласно расположению ведущего устройства, как описано выше со ссылкой на Фиг. 13. В случае, когда вертикально смежным направлением является направление +V, обработка переходит на этап S226A. Между тем, в случае, когда вертикально смежным направлением является направление -V, обработка переходит на этап S226B.
Значение S определения, описанное выше, в дальнейшем также называется "MB". Значение S определения является целочисленной частью значения, полученного посредством "CT/Hm".
На этапе S226A блок 21 вычисления выполняет обработку V1 по вычислению для вычисления координат VL. При обработке V1 по вычислению, блок 21 вычисления вычисляет координату VL посредством нижеследующего выражения (3).
VL=MB+1 ••• Выражение (3)
На этапе S226B блок 21 вычисления выполняет обработку V2 по вычислению для вычисления координат VL. При обработке V2 по вычислению, блок 21 вычисления вычисляет координату VL посредством нижеследующего выражения (4).
VL=Vm-MB ••• Выражение (4)
Вышеупомянутые вычисления дают координаты P (HL, VL) целевого устройства PD, в случае, когда конфигурацией кабельного соединения является конфигурация горизонтального соединения.
Нижеследующее описывает процедуры для вычисления координат P (HL, VL) ведущего устройства при нижеследующем предварительном условии В1. При предварительном условии В1, CT составляет 0. При предварительном условии В1, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами, как показано на Фиг. 2. При предварительном условии B1, ведущее устройство размещается в верхнем левом конце LT. Таким образом, как показано в части (a) на Фиг. 13, горизонтально смежным направлением является направление +H, и вертикально смежным направлением является направление +V. При предварительном условии B1, горизонтальное число Hm составляет 4, и вертикальное число Vm составляет 3. При предварительном условии B1, конфигурацией кабельного соединения является конфигурация горизонтального соединения.
При предварительном условии B1, описанном выше, за обработкой на этапе S221 следует обработка на этапе S222A. При вышеупомянутом предварительном условии B1, значение S определения, которое является целочисленной частью значения, полученного посредством "CT/Hm", составляет 0. Таким образом, значение Sa определения ряда, которое является остатком выражения "значение S определения/2", составляет 0. Значение Sa определения ряда составляет 0, и блок 21 вычисления вследствие этого определяет, что, на этапе S222A, рядом, соответствующим ведущему устройству, является ряд с нечетным номером.
При предварительном условии B1, горизонтально смежным направлением является направление +H, и таким образом, за обработкой на этапе S223A следует обработка на этапе S224A. Остаток MA выражения "CT/Hm" составляет 0. Выражение, полученное посредством подстановки значения (MA=0) при предварительном условии B1 в выражение (1) при обработке H1 по вычислению, или эквивалентно, "0+1=1", дает 1 в качестве координаты HL.
При предварительном условии B1, вертикально смежным направлением является направление +V, и вследствие этого выполняется обработка на этапе S226A. MB, которое является целочисленной частью значения, полученного посредством "CT/Hm", составляет 0. Выражение, полученное посредством подстановки значения (MB=0) при предварительном условии B1 в выражение (3) при обработке V1 по вычислению, или эквивалентно, "0+1=1", дает 1 в качестве координаты VL. Таким образом, вычисления дают координаты P (1, 1) в качестве координат ведущего устройства.
Далее, в качестве другого примера, нижеследующее описывает процедуры для вычисления координат P (HL, VL) ведущего устройства при предварительном условии B2. Предварительное условие B2 отличается от предварительного условия B1 только в том, что ведущее устройство размещается в верхнем правом конце RT вместо размещения в верхнем левом конце LT. Предварительное условие B2 кроме вышеуказанного аспекта является таким же как предварительное условие В1. При предварительном условии B2, горизонтально смежным направлением является направление -H.
При предварительном условии B2, выполняется обработка, как при обработке при предварительном условии B1, описанном выше, в указанном порядке этапов S221, S222A, S223A и S224B. Остаток MA выражения "CT/Hm" составляет 0. Выражение, полученное посредством подстановки значений (Hm=4 и MA=0) при предварительном условии B2 в выражение (2) при обработке H2 по вычислению, или эквивалентно, "4-0=4", дает 4 в качестве координаты HL.
Затем, как при обработке при предварительном условии B1, выполняется обработка на этапах S225A и S226A, и таким образом, вычисления дают 1 в качестве координаты VL. Таким образом, вычисления дают координаты P (4, 1) в качестве координат ведущего устройства.
Далее, в качестве другого примера, нижеследующее описывает процедуры для вычисления координат P (HL, VL) при предварительном условии B3. Предварительное условие B3 отличается от предварительного условия B1 только в том, что ведущее устройство размещается в нижнем левом конце LB вместо размещения в верхнем левом конце LT. Предварительное условие B3 кроме вышеуказанного аспекта является таким же как предварительное условие B1. При предварительном условии B3, вертикально смежным направлением является направление -V.
При предварительном условии B3, выполняется обработка, как при обработке при предварительном условии B1, описанном выше, в указанном порядке этапов S221, S222A, S223A, S224B, S225A и S226B. MB, которое является целочисленной частью значения полученного посредством выражения "CT/Hm", составляет 0. Выражение, полученное посредством подстановки значений (Vm=3 и MB=0) при предварительном условии B3 в выражение (4) при обработке V2 по вычислению, или эквивалентно, "3-0=3", дает 3 в качестве координаты VL. Таким образом, вычисления дают координаты P (1, 3) в качестве координат ведущего устройства.
Нижеследующее описывает обработку по вычислению координат в случае, когда конфигурацией кабельного соединения является конфигурация вертикального соединения. Если конфигурацией кабельного соединения является конфигурация вертикального соединения, обработка, прошедшая этап S221, переходит на этап S222B.
На этапе S222B блок 21 вычисления (блок 20 управления) определяет, является ли соответствующий столбец столбцом с нечетным номером или столбцом с четным номером. Соответствующий столбец является столбцом матрицы MX, соответствующим целевому устройству PD. Столбцы с нечетными номерами ссылаются на столбцы с нечетными номерами матрицы MX, при этом ее началом является расположение ведущего устройства (опорного устройства отображения видео). Столбцы с четными номерами ссылаются на столбцы с четными номерами матрицы MX, при этом ее началом является расположение ведущего устройства.
Отражено нижеследующее предварительное условие C1. В качестве примера, при предварительном условии C1, предполагается, что индивидуальные устройства 100 отображения видео скомпонованы как показано на Фиг. 9. При предварительном условии C1, целевым устройством PD является устройство 100-1 отображения видео. При предварительном условии C1, предполагается, что ведущее устройство размещается в верхнем левом конце LT.
При вышеупомянутом предварительном условии C1, первым столбцом матрицы MX является самый левый столбец матрицы MX, соответствующей конфигурации на Фиг. 9.
То есть, первым столбцом матрицы MX является столбец, соответствующий, например, устройствам 100-1 и 100-2 отображения видео. Столбец, соответствующий целевому устройству PD является первым столбцом матрицы MX. Столбцами с нечетными номерами матрицы MX, соответствующей предварительному условию C1, являются, например, столбец, соответствующий устройству 100-1 отображения видео, и столбец, соответствующий устройству 100-7 отображения видео. Столбцами с четными номерами матрицы MX, соответствующей предварительному условию C1, являются, например, столбец, соответствующий устройству 100-6 отображения видео, и столбец, соответствующий устройству 100-12 отображения видео. Таким образом, столбцом, соответствующим целевому устройству PD при предварительном условии C1, является столбец с нечетным номером.
Затем, отражено нижеследующее предварительное условие C2. При предварительном условии C2, как показано на Фиг. 7, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами. При предварительном условии C2, целевым устройством PD является устройство 100-1 отображения видео. При предварительном условии C2, ведущее устройство размещается в верхнем правом конце RT.
При вышеупомянутом предварительном условии C2, первым столбцом матрицы MX является самый правый столбец матрицы MX, соответствующей конфигурации на Фиг. 7. Столбец, соответствующий целевому устройству PD является первым столбцом матрицы MX. Столбцами с нечетными номерами матрицы MX, соответствующей предварительному условию C2, являются, например, столбец, соответствующий ведущему устройству, и столбец, соответствующий устройству 100 отображения видео, смежному с другим устройством 100 отображения видео, размещенным в верхнем левом конце LT в направлении X. Столбцами с четными номерами матрицы MX, соответствующей предварительному условию C2, являются, например, столбец, соответствующий устройству 100 отображения видео, смежному с ведущим устройством в направлении -X, и столбец, соответствующий устройству 100 отображения видео, размещенному в верхнем левом конце LT. Таким образом, при предварительном условии C2, столбцом, соответствующим целевому устройству PD, является столбец с нечетным номером.
На этапе S222B является ли соответствующий столбец столбцом с нечетным номером или столбцом с четным номером вычисляется нижеследующим образом. В частности, блок 21 вычисления (блок 20 управления) определяет, является ли соответствующий столбец столбцом с нечетным номером или столбцом с четным номером, с использованием актуального значения счетчика CT и вертикального числа Vm, хранящегося в запоминающем блоке 32.
Целочисленная часть значения, полученного посредством "CT/Vm" задается как "значение T определения". Vm является вертикальным значением Vm. В качестве примера, предполагается, что CT составляет 0, и Vm составляет 3. В этом случае, значение T определения составляет 0. В качестве другого примера, предполагается, что CT составляет 5, и Vm составляет 3. В этом случае, значение T определения получается посредством "5/3=1,67", составляя 1. То есть, значение T определения составляет 1, что является целочисленной частью 1,67.
Остаток выражения "значение T определения/2" задается как "значение Ta определения столбца". В качестве примера, предполагается, что значение T определения составляет 0. В этом случае, значение Ta определения столбца получается посредством "0/2", составляя 0. То есть, значение Ta определения столбца составляет 0, соответствуя остатку деления "0/2". В качестве другого примера, предполагается, что значение T определения составляет 1. В этом случае, значение Ta определения столбца получается посредством "1/2", составляя 1. То есть, значение Ta определения столбца составляет 1, соответствуя остатку деления "1/2". В качестве еще одного примера, предполагается, что значение T определения составляет 2. В этом случае, значение Ta определения столбца получается посредством "2/2", составляя 0. То есть, значение Ta определения столбца составляет 0, соответствуя остатку деления "2/2".
В случае, когда значение определения столбца Та составляет 0, блок 21 вычисления определяет, что столбец, соответствующий целевому устройству PD, является столбцом с нечетным номером. В этом случае, обработка переходит на этап S223C. В случае, когда значение определения столбца Та составляет 1, блок 21 вычисления определяет, что столбец, соответствующий целевому устройству PD, является столбцом с четным номером. В этом случае, обработка переходит на этап S223D.
На этапе S223C выполняется такая же обработка как обработка на этапе S225A, и ее подробное описание опущено. В случае, когда вертикально смежным направлением является направление +V, обработка переходит на этап S224E. Между тем, в случае, когда вертикально смежным направлением является направление -V, обработка переходит на этап S224F.
Остаток выражения "CT/Vm" в дальнейшем задан как "MC". В качестве примера, предполагается, что CT составляет 0, и Vm составляет 3. В этом случае, MC получается посредством "0/3", составляя 0. То есть, MC составляет 0, соответствуя остатку деления "0/3". В качестве другого примера, предполагается, что CT составляет 5, и Vm составляет 4. В этом случае, MC получается посредством "5/4", составляя 1. То есть, MC составляет 1, соответствуя остатку деления "5/4".
На этапе S224E блок 21 вычисления выполняет обработку V3 по вычислению для вычисления координат VL. При обработке V3 по вычислению, блок 21 вычисления вычисляет координату VL посредством нижеследующего выражения (5).
VL=MC+1 ••• Выражение (5)
На этапе S224F блок 21 вычисления выполняет обработку V4 по вычислению для вычисления координат VL. При обработке V4 по вычислению, блок 21 вычисления вычисляет координату VL посредством нижеследующего выражения (6).
VL=Vm - MC ••• Выражение (6)
В случае, когда соответствующий столбец является столбцом с четным номером на вышеописанном этапе S222B, обработка переходит на этап S223D.
На этапе S223D выполняется такая же обработка как обработка на этапе S225A, и ее подробное описание опущено. В случае, когда вертикально смежным направлением является направление +V, обработка переходит на этап S224G. Между тем, в случае, когда вертикально смежным направлением является направление -V, обработка переходит на этап S224H.
На этапе S224G блок 21 вычисления выполняет обработку V5 по вычислению для вычисления координат VL. При обработке V5 по вычислению, блок 21 вычисления вычисляет координату VL посредством вышеописанного выражения (6).
На этапе S224H блок 21 вычисления выполняет обработку V6 по вычислению для вычисления координат VL. При обработке V6 по вычислению, блок 21 вычисления вычисляет координату VL посредством вышеописанного выражения (5).
На этапе S225B выполняется такая же обработка как обработка на вышеописанном этапе S223A, и ее подробное описание опущено. В случае, когда горизонтально смежным направлением является направление +H, обработка переходит на этап S226C. Между тем, в случае, когда горизонтально смежным направлением является направление -H, обработка переходит на этап S226D.
Значение T определения, описанное выше, в дальнейшем также называется "MD". Значение T определения является целочисленной частью значения, полученного посредством "CT/Vm".
На этапе S226C блок 21 вычисления выполняет обработку H5 по вычислению для вычисления координат HL. При обработке H5 по вычислению, блок 21 вычисления вычисляет координату HL посредством нижеследующего выражения (7).
HL=MD+1 ••• Выражение (7)
На этапе S226D блок 21 вычисления выполняет обработку H6 по вычислению для вычисления координат HL. При обработке H6 по вычислению, блок 21 вычисления вычисляет координату HL посредством нижеследующего выражения (8).
HL=Hm - MD ••• Выражение (8)
Вышеупомянутые вычисления дают координаты P (HL, VL) целевого устройства PD, в случае, когда конфигурацией кабельного соединения является конфигурация вертикального соединения.
Нижеследующее описывает процедуры для вычисления координат P (HL, VL) ведущего устройства при нижеследующем предварительном условии D1. При предварительном условии D1, CT составляет 0. При предварительном условии D1, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами, как показано на Фиг. 9. При предварительном условии D1, ведущее устройство размещается в верхнем левом конце LT. Таким образом, как показано в части (a) на Фиг. 13, горизонтально смежным направлением является направление +H, и вертикально смежным направлением является направление +V. При предварительном условии D1, горизонтальное число Hm составляет 4, и вертикальное число Vm составляет 3. При предварительном условии D1, конфигурацией кабельного соединения является конфигурация вертикального соединения.
При предварительном условии D1, описанном выше, за обработкой на этапе S221 следует обработка на этапе S222B. При вышеупомянутом предварительном условии D1, значение T определения, которое является целочисленной частью значения, полученного посредством "CT/Vm", составляет 0. Таким образом, значение Ta определения столбца, которое является остатком выражения "значение T определения/2", составляет 0. Значение Ta определения столбца составляет 0, и блок 21 вычисления вследствие этого определяет, что, на этапе S222B, столбцом, соответствующим ведущему устройству, является столбец с нечетным номером.
При предварительном условии D1, вертикально смежным направлением является направление +V, и таким образом, за обработкой на этапе S223C следует обработка на этапе 224E. MC, полученное посредством выражения "CT/Vm", составляет 0. Выражение, полученное посредством подстановки значения (MC=0) при предварительном условии D1 в выражение (5) при обработке V3 по вычислению, или эквивалентно, "0+1=1", дает 1 в качестве координаты VL.
При предварительном условии D1, горизонтально смежным направлением является направление +H, и вследствие этого выполняется обработка на этапе S226C. MD, которое является целочисленной частью значения, полученного посредством "CT/Vm", составляет 0. Выражение, полученное посредством подстановки значения (MD=0) при предварительном условии D1 в выражение (7) при обработке H5 по вычислению, или эквивалентно, "0+1=1", дает 1 в качестве координаты HL. Таким образом, вычисления дают координаты P (1, 1) в качестве координат ведущего устройства.
Далее, в качестве другого примера, нижеследующее описывает процедуры для вычисления координат P (HL, VL) ведущего устройства при предварительном условии D2. Предварительное условие D2 отличается от предварительного условия D1 только в том, что ведущее устройство размещается в верхнем правом конце RT вместо размещения в верхнем левом конце LT. Предварительное условие D2 кроме вышеуказанного аспекта является таким же как предварительное условие D1. При предварительном условии D2, горизонтально смежным направлением является направление -H.
При предварительном условии D2, выполняется обработка, как при обработке при предварительном условии D1, описанном выше, в указанном порядке этапов S221, S222B, S223C, S224E, S225B и S226D. Целочисленная часть MD значения, полученного посредством выражения "CT/Vm", составляет 0. Выражение, полученное посредством подстановки значений (Hm=4 и MD=0) при предварительном условии D2 в выражение (8) при обработке H6 по вычислению, или эквивалентно, "4-0=4", дает 4 в качестве координаты HL. Таким образом, вычисления дают координаты P (4, 1) в качестве координат ведущего устройства.
Далее, в качестве другого примера, нижеследующее описывает процедуры для вычисления координат P (HL, VL) ведущего устройства при предварительном условии D3.
Предварительное условие D3 отличается от предварительного условия D1 только в том, что ведущее устройство размещается в нижнем левом конце LB вместо размещения в верхнем левом конце LT. Предварительное условие D3 кроме вышеуказанного аспекта является таким же как предварительное условие D1. При предварительном условии D3, вертикально смежным направлением является направление -V.
При предварительном условии D3, выполняется обработка, как при обработке при предварительном условии D1, описанном выше, в указанном порядке этапов S221, S222B, S223C и S224F. Остаток MC выражения "CT/Vm" составляет 0. Выражение, полученное посредством подстановки значений (Vm=3 и MC=0) при предварительном условии D3 в выражение (6) при обработке V4 по вычислению, или эквивалентно, "3-0=3", дает 3 в качестве координаты VL.
Затем, как при обработке при вышеописанном предварительном условии D1, выполняется обработка на этапах S225B и S226C, и таким образом, вычисление дает 1 в качестве координаты HL. Вышеупомянутые вычисления дают координаты P (1, 3) в качестве координат ведущего устройства.
Как описано выше, при обработке по вычислению координат, блок 21 вычисления вычисляет координаты P на основе расположения ведущего устройства с использованием любых двух из выражений (1)-(8). После окончания обработки по вычислению координат, обработка возвращается к обработке BM соответствия задания идентификационной информации на Фиг. 11, и выполняется обработка на этапе S230.
На этапе S230 выполняется обработка BM по вычислению идентификационной информации. Подводя итог, при обработке BM по вычислению идентификационной информации, блок 21 вычисления вычисляет идентификационный номер i, являющийся идентификационной информацией, на основе правила задания идентификационной информации.
Фиг. 14 является схемой последовательности операций обработки BM по вычислению идентификационной информации. Устройство 100 отображения видео, чей идентификационный номер i, являющийся идентификационной информацией, должен быть вычислен при обработке BM по вычислению идентификационной информации, в дальнейшем также называется "целевым устройством BD". Сначала, обработка на этапе S231 выполняется при обработке BM по вычислению идентификационной информации.
На этапе S231 определяется вид правила задания идентификационной информации. В частности, блок 21 вычисления определяет, является ли правило задания идентификационной информации правилом горизонтального задания или правилом вертикального задания. Более конкретно, блок 21 вычисления (блок 20 управления) определяет, является ли информация правила задания идентификационной информации R, хранящейся в запоминающем блоке 32, информацией, точно определяющей правило горизонтального задания, или информацией, точно определяющей правило вертикального задания.
Если правило задания идентификационной информации является правилом горизонтального задания, или эквивалентно, если информация правила задания идентификационной информации R является информацией, точно определяющей правило горизонтального задания, обработка переходит на этап S232A. Между тем, если правило задания идентификационной информации является правилом вертикального задания, или эквивалентно, если информация правила задания идентификационной информации R является информацией, точно определяющей правило вертикального задания, обработка переходит на этап S232B.
На этапе S232A выполняется обработка по вычислению B1 для вычисления идентификационного номера i. При обработке по вычислению B1, блок 21 вычисления вычисляет идентификационный номер i посредством нижеследующего выражения (9) с использованием вычисленных координат P (HL, VL), горизонтального числа Hm и вертикального числа Vm.
i=HL+(VL-1) × Hm ••• Выражение (9)
На этапе S232B выполняется обработка по вычислению B2 для вычисления идентификационного номера i. При обработке по вычислению B2, блок 21 вычисления вычисляет идентификационный номер i посредством нижеследующего выражения (10) с использованием вычисленных координат P (HL, VL).
i=(HL-1)×Vm+VL ••• Выражение (10) Вышеупомянутые вычисления дают идентификационный номер i. Нижеследующее описывает процедуры для вычисления идентификационного номера i ведущего устройства при нижеследующем предварительном условии E1. При предварительном условии E1, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами, как показано на Фиг. 2. При предварительном условии E1, горизонтальное число Hm составляет 4, и вертикальное число Vm составляет 3. При предварительном условии E1, ведущее устройство размещается в верхнем левом конце LT. При предварительном условии E1, ведущее устройство имеет координаты (1, 1). При предварительном условии E1, правилом задания идентификационной информации является правило горизонтального задания.
При вышеупомянутом предварительном условии E1, обработка выполняется в указанном порядке этапов S231 и S232A. При обработке по вычислению B1 на этапе S232A, блок 21 вычисления предоставляет 1 в качестве идентификационного номера i посредством выражения, полученного посредством подстановки значений (HL=1, VL=1 и Hm=4) при предварительном условии E1 в выражение (9), или эквивалентно, "1+(1-1)×4=1".
В качестве другого примера, нижеследующее описывает процедуры для вычисления идентификационного номера i ведущего устройства при предварительном условии E2. Предварительное условие E2 отличается от предварительного условия E1 только в том, что правилом задания идентификационной информации является правило вертикального задания. Предварительное условие E2 кроме вышеуказанного аспекта является таким же как предварительное условие E1.
При предварительном условии E2, обработка выполняется в указанном порядке этапов S231 и S232B. При обработке по вычислению B2 на этапе S232B, блок 21 вычисления предоставляет 1 в качестве идентификационного номера i посредством выражения, полученного посредством подстановки значений (HL=1, Vm=3 и VL=1) при предварительном условии E2 в выражение (10), или эквивалентно, "(1-1)×3+1=1".
Как описано выше, при обработке BM по вычислению идентификационной информации, блок 21 вычисления вычисляет идентификационный номер i, являющийся идентификационной информацией, на основе правила задания идентификационной информации, с использованием выражения (9) или выражения (10). После окончания обработки BM по вычислению идентификационной информации, обработка возвращается к обработке BM соответствия задания идентификационной информации на Фиг. 11, и выполняется обработка на этапе S241.
На этапе S241 выполняется обработка BM по заданию идентификационной информации. При обработке BM по заданию идентификационной информации, блок 22 задания из блока 20 управления выполняет обработку для задания идентификационного номера i устройства отображения видео (ведущее устройство) с вычисленными координатами P рассматриваемому устройству отображения видео (ведущему устройству). В частности, блок 22 задания предписывает запоминающему блоку 32 сохранить идентификационный номер i, вычисленный при обработке BM по вычислению идентификационной информации. Следовательно, идентификационный номер задается ведущему устройству.
На этапе S242 выполняется обработка PM по заданию координат. При обработке PM по заданию координат, блок 22 задания выполняет обработку для задания координат P устройства отображения видео (ведущего устройства) с вычисленными координатами P рассматриваемому устройству отображения видео (ведущему устройству). В частности, блок 22 задания предписывает запоминающему блоку 32 сохранить координаты P ведущего устройства, вычисленные при обработке по вычислению координат. Следовательно, координаты P задаются ведущему устройству.
На этапе S243 блок 21 вычисления (блок 20 управления) увеличивает значение счетчика CT на 1. Таким образом, значение счетчика CT составляет 1.
На этапе S244 блок 20 управления отправляет команду выполнения задания идентификационной информации В всем ведомым устройствам. Команда выполнения задания идентификационной информации В является командой для предписания ведомому устройству задать идентификационный номер i, являющийся идентификационной информацией. Другими словами, команда выполнения задания идентификационной информации В является командой для предписания ведомому устройству выполнить обработку (в дальнейшем также называемую "обработкой BS соответствия задания идентификационной информации") для задания идентификационного номера i. Команда выполнения задания идентификационной информации В является также командой для переключения режима функционирования ведомого устройства на режим задания идентификационной информации.
В частности, блок 20 управления ведущего устройства отправляет команду B выполнения задания идентификационной информации, причем заданными целями доставки являются все ведомые устройства, в ведомое устройство (устройство 100-2 отображения видео), которое идет вторым в последовательности передачи. Идентификационный номер i указан в команде B выполнения задания идентификационной информации. В качестве примера, предполагается, что номер 9999 задан в качестве значения идентификационного номера i. Таким образом, команда выполнения задания идентификационной информации В отправляется во все ведомые устройства по каналу SK связи согласно вышеупомянутой последовательности передачи.
Следовательно, блок 20 управления каждого из ведомых устройств принимает команду B выполнения задания идентификационной информации. В частности, блок 33 обработки связи принимает команду выполнения задания идентификационной информации В от предыдущего смежного устройства 100 отображения видео (ведущего устройства или ведомого устройства) через входной контакт 35a. Блок 33 обработки связи отправляет принятую команду выполнения задания идентификационной информации В в блок 20 управления и на выходной контакт 35b. Блок 20 управления таким образом принимает команду B выполнения задания идентификационной информации.
Значение идентификационного номера i, указанного командой выполнения задания идентификационной информации В не ограничено значением 9999 и может быть любым числом, большим, чем максимальное значение (например, 100), которое может быть фактически задано в качестве идентификационного номера i.
Блок 20 управления индивидуального ведомого устройства выполняет обработку BS соответствия задания идентификационной информации после приема команды B выполнения задания идентификационной информации. Фиг. 15 является схемой последовательности операций обработки BS соответствия задания идентификационной информации. Сначала, обработка на этапе S311 выполняется при обработке BS соответствия задания идентификационной информации.
На этапе S311 идентификационный номер i задается в значение 9999. В частности, блок 20 управления предписывает запоминающему блоку 32 сохранить идентификационный номер i (9999), указанный принятой командой выполнения задания идентификационной информации В.
На этапе S312 выполняется обработка по переключению режима задания. При обработке по переключению режима задания, блок 20 управления переключает режим функционирования ведомого устройства с вышеупомянутого обычного режима на режим задания идентификационной информации в соответствии с командой B выполнения задания идентификационной информации.
На этапе S313 выполняется обработка по переключению состояния связи ST. При обработке по переключению состояния связи ST, блок 20 управления задает состояние блока 33 обработки связи в состояние приостановки пересылки в восходящем направлении. Как описано выше, блок 33 обработки связи в состоянии приостановки пересылки в восходящем направлении отправляет данные, принятые выходным контактом 35b, только в блок 20 управления и не отправляет данные на входной контакт 35a. Блок 33 обработки связи в состоянии приостановки пересылки в восходящем направлении отправляет (пересылает) данные (сигнал), принятые входным контактом 35a, на выходной контакт 35b.
В ведущем устройстве, за обработкой на этапе S244 следует этап S245. Ведомое устройство, имеющее идентификационный номер i, заданный в значение 9999, в дальнейшем также называется "целевым ведомым устройством".
На этапе S245 блок 20 управления отправляет, на каждое из целевых ведомых устройств, команду запроса индивидуальной информации для запроса индивидуальной информации. Индивидуальной информацией является информация для идентифицирования каждого из ведомых устройств. Индивидуальная информация включает в себя, например, серийные номера и MAC-адреса. Каждое из ведомых устройств имеет заранее заданную ему отличительную индивидуальную информацию.
Таким образом, команда запроса индивидуальной информации отправляется всем целевым ведомым устройствам согласно вышеупомянутой последовательности передачи.
После приема команды запроса индивидуальной информации, целевое ведомое устройство выполняет обработку на этапе S321.
На этапе S321 выполняется обработка по отправке индивидуальной информации. При обработке по отправке индивидуальной информации, блок 20 управления отправляет индивидуальную информацию собственного устройства (ведомого устройства) в блок 33 обработки связи, так чтобы переслать релевантную индивидуальную информацию в ведущее устройство посредством блока 33 обработки связи и входного контакта 35a, также как и канал SK связи, описанный выше. Ведущее устройство задается в качестве цели доставки индивидуальной информации.
К сожалению, в результате обработки по переключению состояния связи ST, описанной выше, состояние блока 33 обработки связи задается в состояние приостановки пересылки в восходящем направлении. Таким образом, блок 33 обработки связи в состоянии приостановки пересылки в восходящем направлении не отправляет индивидуальную информацию, принятую выходным контактом 35b, на входной контакт 35a. В случае, когда обработка по отправке индивидуальной информации выполняется в первый раз, ведущее устройство принимает индивидуальную информацию устройства 100-2 отображения видео только от устройства 100-2 отображения видео.
Ведомое устройство, соответствующее индивидуальной информации, принятой ведущим устройством, в дальнейшем также называется "ответным ведомым устройством". В случае, когда обработка по отправке индивидуальной информации выполняется в первый раз, ответное ведомое устройство относится только к устройству 100-2 отображения видео.
После приема индивидуальной информации, ведущее устройство выполняет обработку на этапе S260. На этапе S260 выполняется обработка по вычислению координат на Фиг. 12. Координаты P ответного ведомого устройства вычисляются посредством обработки по вычислению координат. Пример вычисления координат P ответного ведомого устройства будет описан позднее.
На этапе S270 выполняется обработка BM по вычислению идентификационной информации на Фиг. 14. Идентификационный номер i ответного ведомого устройства вычисляется посредством обработки BM по вычислению идентификационной информации. Пример вычисления идентификационного номера i ответного ведомого устройства будет описан позднее.
На этапе S281 выполняется обработка BP по управлению заданием информации. Обработка BP по управлению заданием информации является обработкой для задания, посредством блока 22 задания, идентификационного номера i устройства отображения видео (ответного ведомого устройства) с вычисленными координатами P рассматриваемому устройству отображения видео. Обработка BP по управлению заданием информации является также обработкой для задания, посредством блока 22 задания, координат P устройства отображения видео (ответного ведомого устройства) с вычисленными координатами P рассматриваемому устройству отображения видео (ответному ведомому устройству).
В частности, при обработке BP по управлению заданием информации, блок 22 задания отправляет команду задания информации ответному ведомому устройству. Команда задания информации является командой для задания вычисленного идентификационного номера i и вычисленных координат P ответного ведомого устройства ответному ведомому устройству. Команда задания информации указывает идентификационный номер i и координаты P рассматриваемого ответного ведомого устройства. Команда задания информации также указывает индивидуальную информацию ответного ведомого устройства, принятую ведущим устройством.
В ответном ведомом устройстве, блок 20 управления принимает команду задания информации на этапе S331.
На этапе S332, блок 20 управления определяет, согласуется ли индивидуальная информация собственного устройства (ответного ведомого устройства) с индивидуальной информацией, указанной принятой командой задания информации. Если этап S332 дает в результате ДА, обработка переходит на этап S333. Если этап S332 дает в результате НЕТ, обработка переходит на этап S334B.
На этапе S333 выполняется обработка BP по заданию информации. При обработке BP по заданию информации, блок 22 задания задает идентификационный номер i, указанный принятой командой задания информации, собственному устройству (ответному ведомому устройству). В частности, блок 22 задания изменяет значение (9999) идентификационного номера i, хранящегося в запоминающем блоке 32, на значение идентификационного номера i, указанного командой задания информации.
Блок 22 задания задает координаты P, указанные принятой командой задания информации, собственному устройству (ответному ведомому устройству). В частности, блок 22 задания предписывает запоминающему блоку 32 сохранить координаты P, указанные командой задания информации.
На этапе S334A блок 20 управления (блок 22 задания) отправляет уведомление о завершении ведущему устройству. Уведомление о завершении является уведомлением, что задание идентификационного номера и координат было завершено.
На этапе S335 выполняется обработка по переключению на обычный режим. При обработке по переключению на обычный режим, блок 20 управления переключает режим функционирования устройства 100 отображения видео с режима задания идентификационной информации на обычный режим. Наряду с этим, блок 20 управления задает состояние блока 33 обработки связи в обычное состояние. То есть, состояние приостановки пересылки в восходящем направлении обработки 33 связи отменяется.
Как описано выше, блок 33 обработки связи в обычном состоянии отправляет (пересылает) данные, принятые выходным контактом 35b, на входной контакт 35a. Как описано выше, блок 33 обработки связи в обычном состоянии отправляет данные, принятые входным контактом 35a или выходным контактом 35b, в блок 20 управления. Как описано выше, блок 33 обработки связи в обычном состоянии отправляет данные (сигнал), принятые блоком 20 управления, на входной контакт 35a или выходной контакт 35b в соответствии с пунктом назначения релевантных данных.
Обработка по переключению на обычный режим, описанная выше, обеспечивает устройству 100-2 отображения видео возможность отправки (пересылки) данных, принятых выходным контактом 35b, на входной контакт 35a. Данные, отправленные на входной контакт 35a, отправляются в предыдущее устройство 100 отображения видео (ведущее устройство), смежное с вышеупомянутым ведомым устройством отображения. Затем обработка BS соответствия задания идентификационной информации завершается.
Если этап S332 дает в результате НЕТ, обработка переходит на этап S334B. На этапе S334B, блок 20 управления (блок 22 задания) отправляет уведомление об ошибке в ведущее устройство.
После приема уведомления о завершении или уведомления об ошибке посредством вышеописанной обработки, ведущее устройство выполняет обработку на этапе S282.
На этапе S282 блок 20 управления определяет, какой вид уведомления был принят. Если блок 20 управления принимает уведомление о завершении, обработка переходит на этап S291. Если блок 20 управления принимает уведомление об ошибке, обработка BM соответствия задания идентификационной информации заканчивается.
Число устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, в дальнейшем также называется "составляющим числом C" или "C". С является натуральным числом. В случае, когда многоэкранное устройство 1000 отображения имеет конфигурацию на Фиг. 2, составляющее число С составляет 12.
На этапе S291 блок 20 управления определяет, больше ли значение счетчика CT, чем значение, полученное посредством выражения "С - 1", или равно ему, или нет. Составляющее число С вычисляется выражением "горизонтальное число Hm × вертикальное число Vm".
Если этап S291 дает в результате ДА, обработка BM соответствия задания идентификационной информации заканчивается. Для ДА на этапе S291, задание координат P и идентификационного номера i было завершено для всех устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения. Между тем, для НЕТ на этапе S291 обработка переходит на этап S292.
На этапе S292 блок 21 вычисления увеличивает значение счетчика CT на 1. Затем, обработка на этапе S245 выполняется снова.
В случае, когда блоку 20 управления длительное время не удается принять уведомление об ошибке или значение счетчика CT продолжает быть меньше, чем "С - 1", посредством обработки BM соответствия задания идентификационной информации, описанной выше, обработка на этапах S245-S292 выполняется повторно. Таким образом, этап S281 выполняется повторно. Этап S281 выполняется повторно, так чтобы блок 22 задания выполнил обработку для задания идентификационного номера i каждого из устройств отображения видео (ответных ведомых устройств) с вычисленными координатами P рассматриваемому устройству отображения видео (ответному ведомому устройству). Этап S281 выполняется повторно, так чтобы блок 22 задания выполнил обработку для задания координат P каждого из устройств отображения видео (ответных ведомых устройств) с вычисленными координатами P рассматриваемому устройству отображения видео (ответному ведомому устройству).
Каждый раз, когда выполняется обработка на этапах S245-S292, число целевых ведомых устройств уменьшается. Например, целевыми ведомыми устройствами в конце первого цикла обработки на этапах S245-S292 являются устройства 100-3, 100-4, 100-5, 100-6, 100-7, 100-8, 100-9, 100-10, 100-11 и 100-12 отображения видео.
Каждый раз, когда выполняется обработка на этапах S245-S292, выполняется обработка A, описанная ниже. При обработке A, команда запроса индивидуальной информации отправляется каждому из целевых ведомых устройств посредством этапа S245. При обработке A, после приема команды запроса индивидуальной информации, целевые ведомые устройства выполняют обработку на этапе S321.
Например, в случае, когда выполняется второй цикл обработки на этапе S245, ведущее устройство принимает индивидуальную информацию устройства 100-3 отображения видео только от устройства 100-3 отображения видео. В этом случае, ответное ведомое устройство относится только к устройству 100-3 отображения видео. В этом случае, значение счетчика CT, используемое для вычисления координат P и идентификационного номера i устройства 100-3 отображения видео, составляет 2.
То есть, посредством обработки BM соответствия задания идентификационной информации, описанной выше, ведущее устройство увеличивает значение счетчика CT, и наряду с увеличением, задает координаты P и идентификационный номер i каждому из ведомых устройств согласно последовательности передачи.
Если "CT=С-1" удовлетворяется (ДА на этапе S291), ведущее устройство определяет, что задание идентификационного номера i было завершено для устройств отображения видео, включающих в себя оконечное устройство отображения видео, упомянутое выше, и обработка BM соответствия задания идентификационной информации заканчивается.
Нижеследующее описывает процедуры для вычисления координат P и идентификационных номеров i ведомых устройств. Ведомое устройство, чьи координаты P и идентификационный номер i должны быть вычислены, в дальнейшем также называется "целевым для вычисления ведомым устройством". Сначала, нижеследующее описывает процедуры для вычисления координат P и идентификационного номера i целевого для вычисления ведомого устройства при нижеследующем предварительном условии F1.
При предварительном условии F1, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами, как показано на Фиг. 2. При предварительном условии F1, целевым для вычисления ведомым устройством является устройство 100-6 отображения видео. При предварительном условии F1, CT составляет 5. При предварительном условии F1, горизонтальное число Hm составляет 4, и вертикальное число Vm составляет 3. При предварительном условии F1, ведущее устройство размещается в верхнем левом конце LT. Таким образом, как показано в части (a) на Фиг. 13, горизонтально смежным направлением является направление +H, и вертикально смежным направлением является направление +V. При предварительном условии F1, конфигурацией кабельного соединения является конфигурация горизонтального соединения. При предварительном условии F1, правилом задания идентификационной информации является правило горизонтального задания.
Сначала, нижеследующее описывает процедуры для вычисления координат P при нижеследующем предварительном условии F1. Со ссылкой на Фиг. 12, за обработкой на этапе S221 следует обработка на этапе S222A при предварительном условии F1.
На этапе S222A, при вышеупомянутом предварительном условии F1, значение S определения, которое является целочисленной частью значения, заданного посредством "CT/Hm", получается посредством 5/4=1,25, составляя 1. Таким образом, значение Sa определения ряда, которое является остатком выражения "значение S определения/2", получается посредством 1/2, составляя 1. Значение Sa определения ряда составляет 1, и блок 21 вычисления вследствие этого определяет, что ряд, соответствующий целевому для вычисления ведомому устройству является рядом с четным номером.
Таким образом, обработка переходит на этап S223B. При предварительном условии F1, горизонтально смежным направлением является направление +H, и таким образом, за обработкой на этапе S223B следует обработка на этапе S224C. Остаток MA выражения "CT/Hm" получается посредством 5/4, составляя 1. Выражение, полученное посредством подстановки значений (Hm=4 и MA=1) при предварительном условии F1 в выражение (2) при обработке H3 по вычислению, или эквивалентно, "4-1=3", дает 3 в качестве координаты HL.
При предварительном условии F1, вертикально смежным направлением является направление +V, и вследствие этого выполняется обработка на этапе S226A. MB, которое является целочисленной частью значения, заданного посредством "CT/Hm", получается посредством 5/4=1,25, составляя 1. Выражение, полученное посредством подстановки значения (MB=1) при предварительном условии F1 в выражение (3) при обработке V1 по вычислению, или эквивалентно, "1+1=2", дает 2 в качестве координаты VL. Таким образом, вычисления дают координаты P (3, 2) в качестве координат устройства 100-6 отображения видео, являющегося ведомым устройством при предварительном условии F1.
Далее, нижеследующее описывает процедуры для вычисления идентификационного номера i при предварительном условии F1. При предварительном условии F1, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232A на Фиг. 14. При обработке по вычислению B1 на этапе S232A, блок 21 вычисления предоставляет 7 в качестве идентификационного номера i посредством выражения, полученного посредством подстановки значений (HL=3, VL=2 и Hm=4) при предварительном условии F1 в выражение (9), или эквивалентно, "3+(2-1)×4=7".
Далее, в качестве другого примера, нижеследующее описывает процедуры для вычисления координат P и идентификационного номера i целевого для вычисления ведомого устройства при предварительном условии F2. Предварительное условие F2 отличается от предварительного условия F1 только в том, что ведущее устройство размещается в верхнем правом конце RT вместо размещения в верхнем левом конце LT. Предварительное условие F2 кроме вышеуказанного аспекта является таким же как предварительное условие F1. При предварительном условии F2, горизонтально смежным направлением является направление -H.
При предварительном условии F2, выполняется обработка, как при обработке при предварительном условии F1, описанном выше, в указанном порядке этапов S221, S222A, S223B и S224D на Фиг. 12. Остаток MA выражения "CT/Hm" составляет 1. Выражение, полученное посредством подстановки значения (MA=1) при предварительном условии F2 в выражение (1) при обработке H4 по вычислению, или эквивалентно, "1+1=2", дает 2 в качестве координаты HL.
Затем, как при обработке при предварительном условии F1, выполняется обработка на этапах S225A и S226A, и таким образом, вычисления дают 2 в качестве координаты VL. Таким образом, вычисления дают координаты P (2, 2) в качестве координат устройства 100-6 отображения видео, являющегося ведомым устройством при предварительном условии F2.
Далее, нижеследующее описывает процедуры для вычисления идентификационного номера i при предварительном условии F2. При предварительном условии F2, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232A на Фиг. 14. При обработке по вычислению B1 на этапе S232A, блок 21 вычисления предоставляет 6 в качестве идентификационного номера i посредством выражения, полученного посредством подстановки значений (HL=2, VL=2 и Hm=4) при предварительном условии F2 в выражение (9), или эквивалентно, "2+(2-1) × 4=6".
В качестве другого примера, нижеследующее описывает процедуры для вычисления координат P и идентификационного номера i целевого для вычисления ведомого устройства при предварительном условии F3. Предварительное условие F3 отличается от предварительного условия F1 только в том, что целевым для вычисления ведомым устройством является устройство 100-9 отображения видео. Предварительное условие F3 кроме вышеуказанного аспекта является таким же как предварительное условие F1. При предварительном условии F3, CT составляет 8.
При предварительном условии F3, за обработкой на этапе S221 следует обработка на этапе S222A на Фиг. 12.
На этапе S222A, при вышеупомянутом предварительном условии F3, значение S определения, которое является целочисленной частью значения, заданного посредством "CT/Hm", получается посредством 8/4=2, составляя 2. Таким образом, значение Sa определения ряда, которое является остатком выражения "значение S определения/2", получается посредством 2/2, составляя 0. Значение Sa определения ряда составляет 0, и блок 21 вычисления вследствие этого определяет, что ряд, соответствующий целевому для вычисления ведомому устройству является рядом с нечетным номером.
Таким образом, обработка переходит на этап S223A. При предварительном условии F3, горизонтально смежным направлением является направление +H, и таким образом, за обработкой на этапе S223A следует обработка на этапе S224A. Остаток MA выражения "CT/Hm" получается посредством 8/4, составляя 0. Выражение, полученное посредством подстановки значения (MA=0) при предварительном условии F3 в выражение (1) при обработке H1 по вычислению, или эквивалентно, "0+1=1", дает 1 в качестве координаты HL.
При предварительном условии F3, вертикально смежным направлением является направление +V, и вследствие этого выполняется обработка на этапе S226A. MB, которое является целочисленной частью значения, заданного посредством выражения "CT/Hm", получается посредством 8/4=2, составляя 2. Выражение, полученное посредством подстановки значения (MB=2) при предварительном условии F3 в выражение (3) при обработке V1 по вычислению, или эквивалентно, "2+1=3", дает 3 в качестве координаты VL. Таким образом, вычисления дают координаты P (1, 3) в качестве координат устройства 100-9 отображения видео, являющегося ведомым устройством при предварительном условии F3.
Далее, нижеследующее описывает процедуры для вычисления идентификационного номера i при предварительном условии F3. При предварительном условии F3, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232A на Фиг. 14. При обработке по вычислению B1 на этапе S232A, блок 21 вычисления предоставляет 9 в качестве идентификационного номера i посредством выражения, полученного посредством подстановки значений (HL=1, VL=3 и Hm=4) при предварительном условии F3 в выражение (9), или эквивалентно, "1+(3-1)×4=9".
Далее, в качестве другого примера, нижеследующее описывает процедуры для вычисления координат P и идентификационного номера i целевого для вычисления ведомого устройства при предварительном условии F4.
При предварительном условии F4, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами, как показано на Фиг. 9. При предварительном условии F4, целевым для вычисления ведомым устройством является устройство 100-10 отображения видео. При предварительном условии F4, CT составляет 9. При предварительном условии F4, горизонтальное число Hm составляет 4, и вертикальное число Vm составляет 3. При предварительном условии F4, ведущее устройство размещается в верхнем левом конце LT. Таким образом, как показано в части (a) на Фиг. 13, горизонтально смежным направлением является направление +H, и вертикально смежным направлением является направление +V. При предварительном условии F4, конфигурацией кабельного соединения является конфигурация вертикального соединения. При предварительном условии F4, правилом задания идентификационной информации является правило горизонтального задания.
При предварительном условии F4, за обработкой на этапе S221 следует обработка на этапе S222B на Фиг. 12.
На этапе S222B, при вышеупомянутом предварительном условии F4, значение T определения, которое является целочисленной частью значения, заданного посредством "CT/Vm", получается посредством 9/3=3, составляя 3. Таким образом, значение Та определения столбца, которое является остатком выражения "значение T определения/2", получается посредством 3/2, составляя 1. Значение Та определения столбца составляет 1, и блок 21 вычисления вследствие этого определяет, что столбец, соответствующий целевому для вычисления ведомому устройству, является столбцом с нечетным номером.
Таким образом, обработка переходит на этап S223D. При предварительном условии F4, вертикально смежным направлением является направление +V, и таким образом, за обработкой на этапе S223D следует обработка на этапе S224G. Остаток MC выражения "CT/Vm" получается посредством 9/3, составляя 0. Выражение, полученное посредством подстановки значений (Vm=3 и MC=0) при предварительном условии F4 в выражение (6) при обработке V5 по вычислению, или эквивалентно, "3-0=3", дает 3 в качестве координаты VL.
При предварительном условии F4, горизонтально смежным направлением является направление +H, и вследствие этого выполняется обработка на этапе S226C. MD, которое является целочисленной частью значения, заданного посредством выражения "CT/Vm", получается посредством 9/3=3, составляя 3. Выражение, полученное посредством подстановки значения (MD=3) при предварительном условии F4 в выражение (7) при обработке H5 по вычислению, или эквивалентно, "3+1=4", дает 4 в качестве координаты HL. Таким образом, вычисления дают координаты P (4, 3) в качестве координат устройства 100-10 отображения видео, являющегося ведомым устройством при предварительном условии F4.
Далее, нижеследующее описывает процедуры для вычисления идентификационного номера i при предварительном условии F4. При предварительном условии F4, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232A на Фиг. 14. При обработке по вычислению B1 на этапе S232A, блок 21 вычисления предоставляет 12 в качестве идентификационного номера i посредством выражения, полученного посредством подстановки значений (HL=4, VL=3 и Hm=4) при предварительном условии F4 в выражение (9), или эквивалентно, "4+(3-1) × 4=12".
В качестве другого примера, нижеследующее описывает процедуры для вычисления координат P и идентификационного номера i целевого для вычисления ведомого устройства при предварительном условии F5. Предварительное условие F5 отличается от предварительного условия F4 только в том, что целевым для вычисления ведомым устройством является устройство 100-7 отображения видео. Предварительное условие F5 кроме вышеуказанного аспекта является таким же как предварительное условие F4. При предварительном условии F5, CT составляет 6.
При предварительном условии F5, за обработкой на этапе S221 следует обработка на этапе S222B на Фиг. 12.
На этапе S222B, при вышеупомянутом предварительном условии F5, значение T определения, которое является целочисленной частью значения, заданного посредством "CT/Vm", получается посредством 6/3=2, составляя 2. Таким образом, значение Та определения столбца, которое является остатком выражения "значение T определения/2", получается посредством 2/2, составляя 0. Значение определения столбца Та составляет 0, и блок 21 вычисления вследствие этого определяет, что столбец, соответствующий целевому для вычисления ведомому устройству, является столбцом с нечетным номером.
Таким образом, обработка переходит на этап S223C. При предварительном условии F5, вертикально смежным направлением является направление +V, и таким образом, за обработкой на этапе S223C следует обработка на этапе S224E. Остаток MC выражения "CT/Vm" получается посредством 6/3, составляя 0. Выражение, полученное посредством подстановки значения (MC=0) при предварительном условии F5 в выражение (5) при обработке V3 по вычислению, или эквивалентно, "0+1=1", дает 1 в качестве координаты VL.
При предварительном условии F5, горизонтально смежным направлением является направление +H, и вследствие этого выполняется обработка на этапе S226C. MD, которое является целочисленной частью значения, заданного посредством выражения "CT/Vm", получается посредством 6/3=2, составляя 2. Выражение, полученное посредством подстановки значения (MD=2) при предварительном условии F5 в выражение (7) при обработке H5 по вычислению, или эквивалентно, "2+1=3", дает 3 в качестве координаты HL. Таким образом, вычисления дают координаты P (3, 1) в качестве координат устройства 100-7 отображения видео, являющегося ведомым устройством при предварительном условии F5.
Далее, нижеследующее описывает процедуры для вычисления идентификационного номера i при предварительном условии F5. При предварительном условии F5, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232A на Фиг. 14. При обработке по вычислению B1 на этапе S232A, блок 21 вычисления предоставляет 3 в качестве идентификационного номера i посредством выражения, полученного посредством подстановки значений (HL=3, VL=1 и Hm=4) при предварительном условии F5 в выражение (9), или эквивалентно, "3+(1-1)×4=3".
Как описано выше, вычисления дают координаты P (1, 1) в качестве координат ведущего устройства при предварительном условии D1. При предварительном условии D1, ведущее устройство размещается в верхнем левом конце LT. При предварительном условии D1, конфигурацией кабельного соединения является конфигурация вертикального соединения. Как описано выше, вычисления дают 1 в качестве идентификационного номера i ведущего устройства при предварительном условии E1.
Предполагается, что координаты P и идентификационный номер i вычисляются при условии, что целевым устройством вычисления при предварительном условии F4 является любое одно из устройств 100-2, 100-3, 100-4, 100-5, 100-6, 100-8, 100-9, 100-11 и 100-12 отображения видео. Затем, предполагается, что координаты P и идентификационные номера i индивидуальных устройств 100 отображения видео, вычисленные как описано выше, координаты P и идентификационный номер i устройства 100-10 отображения видео, полученные при вышеупомянутом предварительном условии F4, координаты P и идентификационный номер i устройств 100-7 отображения видео, полученные при вышеупомянутом предварительном условии F5, и координаты P и идентификационный номер i устройства 100-1 отображения видео задаются соответствующим устройствам отображения видео из устройств 100 отображения видео посредством обработки на Фиг. 11 и Фиг. 15.
В этом случае, идентификационные номера i и координаты P индивидуальных устройств 100 отображения видео являются такими как показано на Фиг. 16. Фиг. 16 иллюстрирует состояние, в котором идентификационный номер i и координаты P, заданные индивидуальному устройству 100 отображения видео, отображаются на экране 10 рассматриваемого индивидуального устройства 100 отображения видео.
Как описано выше, в этом предпочтительном варианте осуществления, блок 21 вычисления ведущего устройства (опорного устройства отображения видео), которое идет первым в последовательности передачи, вычисляет координаты P множества устройств 100 отображения видео на полиэкране 10A на основе информации KJ компоновки и вышеупомянутой последовательности передачи. Блок 21 вычисления вычисляет идентификационный номер i на основе правила B задания идентификационной информации. Блок 22 задания выполняет обработку для задания идентификационного номера i каждого из устройств 100 отображения видео с вычисленными координатами P рассматриваемому устройству 100 отображения видео.
Например, это устраняет необходимость вычисления координат P устройств 100 отображения видео для обыкновенного устройства формирования изображения и подобного. Таким образом, координаты P устройств 100 отображения видео могут быть вычислены посредством простой конфигурации. Это способствует вычислению координат P и идентификационных номеров i индивидуальных устройств 100 отображения видео. Как описано выше, блок 22 задания выполняет обработку для задания идентификационного номера i каждого из устройств 100 отображения видео с вычисленными координатами P рассматриваемому устройству 100 отображения видео. Таким образом, идентификационные номера i могут быть заданы устройствам 100 отображения видео посредством простой конфигурации.
Этот предпочтительный вариант осуществления способствует вычислению координат P и идентификационных номеров i индивидуальных устройств 100 отображения видео без использования специального устройства, такого как обыкновенное устройство формирования изображения. Это также способствует заданию вычисленных координат P и вычисленных идентификационных номеров i.
В этом предпочтительном варианте осуществления, ведущее устройство размещается в любом одном из четырех углов полиэкрана 10A. Блок 21 вычисления ведущего устройства вычисляет координаты P на основе расположения ведущего устройства. Немного более конкретно, ведущее устройство может легко вычислить координаты P на основе конфигурации кабельного соединения, последовательности передачи, горизонтального числа Hm и вертикального числа Vm. То есть, ведущее устройство, размещенное в любом одном из четырех углов полиэкрана 10A, может легко вычислить координаты P.
Этот предпочтительный вариант осуществления обеспечивает задание идентификационных номеров i индивидуальным устройствам отображения видео в последовательности согласно горизонтальному растровому сканированию или вертикальному растровому сканированию. То есть, каждое из устройств 100 отображения видео, скомпонованных в матрицу и соединенных посредством гирляндного соединения, может легко задать идентификационный номер i рассматриваемому устройству 100 отображения видео на основе правила задания идентификационной информации, заданного, чтобы упростить оператору (человеку) распознавание идентификационного номера i без использования последовательности передачи, которая следует гирляндному соединению.
В этом предпочтительном варианте осуществления, координаты P и идентификационные номера i, вычисленные блоком 21 вычисления ведущего устройства, задаются индивидуальным ведомым устройствам. Это устраняет необходимость ручного задания оператором координат P и идентификационных номеров i индивидуальным устройствам отображения видео.
В этом предпочтительном варианте осуществления, ведущее устройство может автоматически вычислить координаты P и идентификационные номера i и может также автоматически задать вычисленные координаты P и вычисленные идентификационные номера i индивидуальным устройствам 100 отображения видео, которые соединены посредством гирляндного соединения.
При первоначальной установке обыкновенного многоэкранного устройства отображения, все устройства отображения видео, включенные в многоэкранное устройство отображения, имеют сконфигурированные при изготовлении координаты и сконфигурированные при изготовлении идентификационные номера, другими словами, одинаковые координаты и одинаковый идентификационный номер. В этом случае, устройства отображения видео имеют одинаковый идентификационный номер, делая невозможным задание, например, координат посредством внешнего устройства, такого как PC. Таким образом, оператор должен задать координаты и идентификационный номер каждому из устройств отображения видео.
Между тем, в этом предпочтительном варианте осуществления, оператор задает значения по умолчанию только ведущему устройству посредством внешнего устройства 5 управления, тем самым координаты и идентификационные номера i автоматически задаются индивидуальным устройствам 100 отображения видео, включенным в многоэкранное устройство 1000 отображения. Это может значительно уменьшить время регулирования, требуемое при установке многоэкранного устройства 1000 отображения.
В обыкновенной конфигурации, идентификационный номер задается каждому из устройств отображения видео в вышеупомянутой последовательности передачи на основе гирляндного соединения. Следовательно, идентификационные номера не следуют последовательности согласно горизонтальному растровому сканированию или вертикальному растровому сканированию.
Между тем, в этом предпочтительном варианте осуществления, идентификационный номер i автоматически задается каждому из устройств 100 отображения видео в последовательности согласно горизонтальному растровому сканированию или вертикальному растровому сканированию. Это обеспечивает простое для понимания соответствие между идентификационными номерами i и координатами P устройства 100 отображения видео при управлении многоэкранным устройством 1000 отображения. Это также предотвращает, например, возникновение ошибок управления при регулировании и функционировании многоэкранного устройства 1000 отображения.
В этом предпочтительном варианте осуществления, ведущее устройство, размещенное в любом одном из четырех углов полиэкрана 10A, может уникально задать координаты P и идентификационные номера i устройств 100 отображения видео. Таким образом, в многоэкранном устройстве 1000 отображения, устройство 100 отображения видео в верхнем левом конце необязательно задано в качестве ведущего устройства. То есть, устройство 100 отображения видео, размещенное ближе всего к внешнему устройству 5 управления, может быть задано в качестве ведущего устройства.
Для обыкновенного задания идентификационных номеров в конфигурации, в которой индивидуальные устройства отображения видео соединены посредством гирляндного соединения посредством последовательных кабелей, идентификационные номера задаются согласно последовательности передачи на основе гирляндного соединения. Родственная область техники В требует устройство формирования изображения, такое как камера, для обнаружения расположений индивидуальных устройств отображения видео в многоэкранном устройстве отображения, включающем в себя индивидуальные устройства отображения видео, скомпонованные в матрицу. Это, к сожалению, увеличивает стоимость.
Этот предпочтительный вариант осуществления с вышеописанной конфигурацией может решить вышеупомянутые проблемы.
<Второй предпочтительный вариант осуществления>
В этом предпочтительном варианте осуществления в основном описывается обработка для задания идентификационного адреса.
Идентификационным адресом является, например, адреса протокола Интернета (IP). В этом предпочтительном варианте осуществления, идентификационный адрес выражен в соответствии с, например, протоколом Интернета версии 4 (IPv4). В этом случае, идентификационный адрес выражен в 4 байтах (например, 8 битов × 4=32 бита). Идентификационный адрес выражен посредством последовательности четырех чисел, соединенных точкой. Каждое из чисел, выражающих идентификационный адрес, выражено, например, в 8 битах. В этом случае, каждое из чисел, выражающих идентификационный номер, является числом от 0 до 255. Идентификационный адрес выражен, например, посредством "192.168.100.32".
Идентификационный адрес не ограничивается IP-адресом. Идентификационным адресом может быть, помимо IP-адреса, информация для идентифицирования устройства 100 отображения видео в сети NW. Например, идентификационный адрес может быть выражен числами и/или буквами.
Последнее число последовательности из четырех чисел, включенных в идентификационный адрес, в дальнейшем также называется "конечным адресом fAD" или "fAD". Адрес, включающий в себя последовательность из трех чисел из последовательности из четырех чисел, включенных в идентификационный адрес кроме конечного адреса fAD, в дальнейшем называется "частичным адресом pAD" или "pAD".
В качестве примера, предполагается, что идентификационным номером является "192.168.100.32". В этом случае, частичным адресом является pAD "192.168.100", и конечным адресом fAD является 32.
Согласно заводской конфигурации многоэкранного устройства 1000 отображения, идентификационные адреса индивидуальных устройств 100 отображения видео являются фиксированными значениями. Таким образом, при установке многоэкранного устройства 1000 отображения, идентификационные адреса должны быть заданы индивидуальным устройствам 100 отображения видео, включенным в многоэкранное устройство 1000 отображения, предотвращая перекрытие среди идентификационных адресов индивидуальных устройств 100 отображения видео.
В этом предпочтительном варианте осуществления, индивидуальные устройства 100 отображения видео, включенные в многоэкранное устройство 1000 отображения проходят обработку (в дальнейшем также называемую "обработкой соответствия задания идентификационной информации") для задания идентификационного адреса, являющегося идентификационной информацией, и координат P. Обработка, выполняемая внешним устройством 5 управления при обработке соответствия задания идентификационной информации, в дальнейшем также называется "обработкой NX соответствия задания идентификационной информации".
Фиг. 17 является схемой последовательности операций обработки NX соответствия задания идентификационной информации. Со ссылкой на Фиг. 17, обработка на этапах, обозначенных такими же номерами, как этапы на Фиг. 6, выполняется как описано в первом предпочтительном варианте осуществления, и ее подробное описание не повторяется. Нижеследующее в основном описывает аспекты, отличные от первого предпочтительного варианта осуществления.
Как в первом предпочтительном варианте осуществления, обработка на этапах S110 и S120 выполняется при обработке NX соответствия задания идентификационной информации. Таким образом, блок 20 управления предписывает запоминающему блоку 32 сохранить информацию KJ компоновки (горизонтальное число Hm и вертикальное число Vm).
На этапе S130, как в первом предпочтительном варианте осуществления, выполняется вышеописанная обработка по вводу информации конфигурации проводки для осуществления ввода информации W конфигурации проводки. Таким образом, блок 20 управления предписывает запоминающему блоку 32 сохранить информацию W конфигурации проводки.
В этом предпочтительном варианте осуществления, опорное устройство отображения видео (ведущее устройство) размещается в любом одном из четырех углов полиэкрана 10A как описано выше. Четыре угла включают в себя верхний левый конец LT, верхний правый конец RT, нижний левый конец LB и нижний правый конец RB на Фиг. 7.
На этапе S140, как в первом предпочтительном варианте осуществления, выполняется обработка ввода информации расположения для осуществления ввода информации LJ расположения. Таким образом, блок 20 управления ведущего устройства предписывает запоминающему блоку 32 сохранить информацию LJ расположения.
Правило для задания идентификационных адресов, являющихся идентификационной информацией для индивидуальных устройств 100 отображения видео, в дальнейшем также называется "правилом N задания идентификационной информации" или "правилом задания идентификационной информации". Правилом N задания идентификационной информации является предварительно определенное правило для задания идентификационного адреса, являющегося идентификационной информацией для каждое из устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения. Правило N задания идентификационной информации задается, чтобы упростить оператору (человеку) распознавание идентификационного адреса.
На этапе S150A выполняется обработка по вводу информации правила задания идентификационной информации для осуществления ввода информации правила задания идентификационной информации R. Информация правила задания идентификационной информации R является информацией для точного определения правила N задания идентификационной информации.
Устройство 100 отображения видео, для которого должен быть задан идентификационный адрес, также называется "целевым для задания устройством отображения видео".
Правило задания идентификационной информации для задания идентификационного адреса, как показано в части (a) на Фиг. 18, для индивидуальных устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, в дальнейшем также называется "правилом горизонтального задания". Идентификационные адреса, заданные индивидуальным устройствам 100 отображения видео, отличаются друг от друга только конечными адресами fAD релевантных идентификационных адресов. Для упрощения чертежа, часть (a) на Фиг. 18 указывает только конечные адреса fAD идентификационных адресов. Как описано выше, расположение ведущего устройства (опорного устройства отображения видео) на полиэкране 10A также называется "опорным расположением BL".
В качестве примера, предполагается, что опорным расположением BL является верхний левый конец LT. В этом случае, правило горизонтального задания, упомянутое выше, задается на основе последовательности согласно горизонтальному растровому сканированию. То есть, согласно правилу горизонтального задания, значение конечного адреса fAD идентификационного адреса, который должен быть задан, увеличивается на 1, каждый раз, когда целевое для задания устройство отображения видео сдвигается от одного из устройств 100 отображения видео, соответствующих каждому ряду матрицы MX, к другому устройству 100 отображения видео, находящемуся непосредственно справа.
В частности, согласно правилу горизонтального задания, значение конечного адреса fAD, заданного для устройства 100 отображения видео в (HL+1)-м столбце из числа устройств 100 отображения видео, соответствующих каждому ряду матрицы MX, больше на один, чем значение конечного адреса fAD, заданного для устройства 100 отображения видео в HL-м столбце. Например, как показано в части (a) на Фиг. 18, значение конечного адреса fAD, заданного для устройства 100-2 отображения видео во втором столбце из числа устройств 100 отображения видео, соответствующих первому ряду матрицы MX на Фиг. 1, составляет 33, что больше на один, чем конечный адрес fAD (32), заданный для устройства 100-1 отображения видео в первом столбце.
Согласно правилу горизонтального задания, целевым для задания устройством отображения видео, которому должен быть задан идентификационный адрес вслед за самым правым устройством отображения видео, является самое левое устройство отображения видео, соответствующее ряду, следующему за рядом матрицы MX, соответствующим релевантному самому правому устройству отображения видео. Например, согласно правилу горизонтального задания, целевым для задания устройством отображения видео, которому должен быть присвоен идентификационный адрес вслед за устройством 100-4 отображения видео, соответствующим первому ряду матрицы MX, является устройство 100-8 отображения видео, соответствующее второму ряду матрицы MX.
Правило задания идентификационной информации для задания идентификационного адреса, как показано в части (b) на Фиг. 18, для индивидуальных устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, в дальнейшем также называется "правилом вертикального задания". Для упрощения чертежа, часть (b) на Фиг. 18 указывает только конечные адреса fAD идентификационных адресов.
В качестве примера, предполагается, что опорным расположением BL является верхний левый конец LT. В этом случае, правило вертикального задания задается на основе последовательности согласно вертикальному растровому сканированию. То есть, согласно правилу вертикального задания, значение конечного адреса fAD, который должен быть задан, увеличивается на 1, каждый раз, когда целевое для задания устройство отображения видео сдвигается от одного из устройств 100 отображения видео, соответствующих каждому столбцу матрицы MX, к другому устройству 100 отображения видео, находящемуся непосредственно ниже.
В частности, согласно правилу вертикального задания, значение конечного адреса fAD, заданного для устройства 100 отображения видео в (VL+1)-м ряду из числа устройств 100 отображения видео, соответствующих каждому столбцу матрицы MX, больше на один, чем значение конечного адреса fAD, заданного для устройства 100 отображения видео в VL-м ряду. Например, со ссылкой на Фиг. 9, значение конечного адреса fAD, заданного для устройства 100-2 отображения видео во втором ряду из числа устройств 100 отображения видео, соответствующих первому столбцу матрицы MX, составляет 33, что больше на один, чем конечный адрес fAD (32), заданный для устройства 100-1 отображения видео в первом ряду.
Согласно правилу вертикального задания, целевым для задания устройством отображения видео, которому должен быть задан идентификационный адрес вслед за нижним устройством отображения видео, является верхнее устройство отображения видео, соответствующее столбцу, следующему за столбцом матрицы MX, соответствующим релевантному нижнему устройству отображения видео. Например, согласно правилу вертикального задания, целевым для задания устройством отображения видео, которому должен быть присвоен идентификационный адрес вслед за устройством 100-3 отображения видео, соответствующим первому столбцу матрицы MX, является устройство 100-6 отображения видео, соответствующее второму столбцу матрицы MX.
Обращаясь опять к Фиг. 17, при обработке по вводу информации правила задания идентификационной информации на этапе S150A, обработка выполняется как на этапе S150, и подробное ее описание не повторяется. Нижеследующее предоставляет краткое описание. При обработке по вводу информации правила задания идентификационной информации, оператор вводит информацию правила задания идентификационной информации R во внешнее устройство 5 управления с использованием операционного интерфейса. Обработка выполняется как на этапе S150, так что блок 20 управления ведущего устройства предписывает запоминающему блоку 32 сохранить информацию правила задания идентификационной информации R.
Идентификационный адрес, который должен быть задан ведущему устройству (опорному устройству отображения видео), в дальнейшем также называется "идентификационным адресом начальной точки". Конечный адрес fAD идентификационного адреса начальной точки в дальнейшем также называется "конечным адресом fADa начальной точки" или "fADa". Адрес, включающий в себя последовательность из трех чисел из последовательности из четырех чисел, включенных в идентификационный адрес начальной точки кроме конечного адреса fADa начальной точки, в дальнейшем называется "частичным адресом pADa начальной точки" или "pADa".
На этапе S151 выполняется обработка по вводу идентификационного адреса начальной точки. При обработке по вводу идентификационного адреса начальной точки, оператор вводит идентификационный адрес начальной точки во внешнее устройство 5 управления с использованием операционного интерфейса. В качестве примера, предполагается, что идентификационным адресом начальной точки является "192.168.100.32". В этом случае, частичным адресом pADa начальной точки является "192.168.100", и конечным адресом fADa начальной точки является 32.
Затем, внешнее устройство 5 управления отправляет, в ведущее устройство, идентификационный адрес начальной точки, который был введен. Только ведущее устройство задается в качестве цели доставки идентификационного адреса начальной точки. Таким образом, блок 33 обработки связи ведущего устройства принимает идентификационный адрес начальной точки от контакта 34 внешнего управления. Затем, блок 33 обработки связи отправляет идентификационный адрес начальной точки только в блок 20 управления. Блок 20 управления предписывает запоминающему блоку 32 сохранить идентификационный адрес начальной точки. Таким образом, запоминающий блок 32 хранит частичный адрес pADa начальной точки и конечный адрес fADa начальной точки, включенные в идентификационный адрес начальной точки.
На этапе S160 внешнее устройство 5 управления отправляет команду M выполнения задания идентификационной информации в ведущее устройство (устройство 100-1 отображения видео). Команда M выполнения задания идентификационной информации является командой для предписания ведущему устройству выполнять обработку (в дальнейшем также называемую "обработкой NM соответствия задания идентификационной информации") для задания идентификационного адреса, являющегося идентификационной информацией. Только ведущее устройство является целью доставки команды M выполнения задания идентификационной информации. То есть, команда M выполнения задания идентификационной информации отправляется только в ведущее устройство.
Ведущее устройство выполняет обработку NM соответствия задания идентификационной информации после приема команды M выполнения задания идентификационной информации. В частности, блок 33 обработки связи ведущего устройства принимает команду M выполнения задания идентификационной информации от контакта 34 внешнего управления. Затем, блок 33 обработки связи отправляет команду M выполнения задания идентификационной информации только в блок 20 управления. Таким образом, блок 20 управления ведущего устройства принимает команду M выполнения задания идентификационной информации. Блок 20 управления выполняет обработку NM соответствия задания идентификационной информации в соответствии с командой M выполнения задания идентификационной информации.
Далее описывается обработка NM соответствия задания идентификационной информации. Фиг. 19 является схемой последовательности операций обработки NM соответствия задания идентификационной информации. Со ссылкой на Фиг. 19, обработка на этапах,
обозначенных такими же номерами, как этапы на Фиг. 11, выполняется как описано в первом предпочтительном варианте осуществления, и ее подробное описание не повторяется. Нижеследующее в основном описывает аспекты, отличные от первого предпочтительного варианта осуществления. Как в первом предпочтительном варианте осуществления, обработка на этапах S210 и S220 выполняется при обработке NM соответствия задания идентификационной информации.
На этапе S220, обработка по вычислению координат выполняется как в первом предпочтительном варианте осуществления, и ее подробное описание не повторяется. При обработке по вычислению координат, как описано выше, блок 21 вычисления вычисляет координаты P (расположения) множества устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения на полиэкране 10A, на основе информации KJ компоновки и последовательности передачи, описанных выше. Немного более конкретно, блок 21 вычисления вычисляет координаты P на основе расположения ведущего устройства, являющегося опорным устройством отображения видео. После окончания обработки по вычислению координат, обработка возвращается к обработке NM соответствия задания идентификационной информации на Фиг. 19, и выполняется обработка на этапе S230A.
На этапе S230A выполняется обработка NM по вычислению идентификационной информации. Подводя итог, при обработке NM по вычислению идентификационной информации, блок 21 вычисления вычисляет идентификационный адрес, являющийся идентификационной информацией, на основе правила задания идентификационной информации.
Фиг. 20 является схемой последовательности операций обработки NM по вычислению идентификационной информации. Со ссылкой на Фиг. 20, обработка на этапах, обозначенных такими же номерами, как этапы на Фиг. 14, выполняется как описано в первом предпочтительном варианте осуществления, и ее подробное описание не повторяется. Нижеследующее в основном описывает аспекты, отличные от первого предпочтительного варианта осуществления. Устройство 100 отображения видео, чей идентификационный адрес, являющийся идентификационной информацией, должен быть вычислен при обработке NM по вычислению идентификационной информации, в дальнейшем также называется "целевым устройством ND". Сначала, обработка на этапе S231 выполняется при обработке NM по вычислению идентификационной информации.
На этапе S231, обработка выполняется как в первом предпочтительном варианте осуществления. Таким образом, если правило задания идентификационной информации является правилом горизонтального задания, или эквивалентно, если информация правила задания идентификационной информации R является информацией, точно определяющей правило горизонтального задания, обработка переходит на этап S232NA. Между тем, если правило задания идентификационной информации является правилом вертикального задания, или эквивалентно, если информация правила задания идентификационной информации R является информацией, точно определяющей правило вертикального задания, обработка переходит на этап S232NB.
На этапе S232NA выполняется обработка N1 по вычислению для вычисления конечного адреса fAD и идентификационного адреса. При обработке N1 по вычислению, блок 21 вычисления вычисляет конечный адрес fAD посредством нижеследующего выражения (11) с использованием вычисленных координат P (HL, VL), горизонтального числа Hm и вертикального числа Vm.
fAD=(fADa-1)+HL+(VL-1)×Hm ••• Выражение (11)
В выражении (11), "fADa" относится к "конечному адресу начальной точки fADa", упомянутому выше.
Затем, посредством вычислений, блок 21 вычисления предоставляет, в качестве идентификационного адреса, адрес, включающий в себя частичный адрес pADa начальной точки, хранящийся в запоминающем блоке 32, и вычисленный конечный адрес fAD, которые соединяются друг с другом точкой (.).
На этапе S232NB выполняется обработка N2 по вычислению для вычисления конечного адреса fAD и идентификационного адреса. При обработке N2 по вычислению, блок 21 вычисления вычисляет конечный адрес fAD посредством нижеследующего выражения (12) с использованием вычисленных координат P (HL, VL).
fAD=(fADa-1)+(HL-1)×Vm+VL ••• Выражение (12) Затем, посредством вычислений, блок 21 вычисления предоставляет, в качестве идентификационного адреса, адрес, включающий в себя частичный адрес pADa начальной точки, хранящийся в запоминающем блоке 32, и вычисленный конечный адрес fAD, которые соединяются друг с другом точкой (.).
Вышеупомянутые вычисления дают конечный адрес fAD и идентификационный адрес. В некоторых случаях (в дальнейшем также называемых "ситуацией A"), значение fAD, вычисленного посредством выражения (11) или выражения (12), превышает 255.
В ситуации A, блок 21 вычисления выполняет, при обработке N1 по вычислению или обработке N2 по вычислению, обработку для задания значения fAD в значение любого числа от 0 до 255. В частности, посредством вычислений, блок 21 вычисления предоставляет остаток выражения "fAD/255" в качестве определяющего fAD.
В качестве примера, предполагается, что fAD, вычисленный выражением (11), составляет 257. В этом случае, посредством вычислений, блок 21 вычисления предоставляет 2, являющееся остатком выражения "257/255", в качестве определяющего fAD при обработке N1 по вычислению.
Нижеследующее описывает процедуры для вычисления идентификационного адреса ведущего устройства при нижеследующем предварительном условии E1. При предварительном условии E1, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами, как показано на Фиг. 2. При предварительном условии E1, горизонтальное число Hm составляет 4, и вертикальное число Vm составляет 3. При предварительном условии E1, ведущее устройство размещается в верхнем левом конце LT. При предварительном условии E1, ведущее устройство имеет координаты (1, 1). При предварительном условии E1, правилом задания идентификационной информации является правило горизонтального задания. При предварительном условии E1, адресом начальной точки является "192.168.100.32". То есть, при предварительном условии E1, частичным адресом pADa начальной точки является "192.168.100", и конечным адресом fADa начальной точки является 32.
При вышеупомянутом предварительном условии E1, обработка выполняется в указанном порядке этапов S231 и S232NA. При обработке N1 по вычислению на этапе S232NA, блок 21 вычисления предоставляет 32 в качестве конечного адреса fAD посредством выражения, полученного посредством подстановки значений (fADa=32, HL=1, VL=1, и Hm=4) при предварительном условии E1 в выражение (11), или эквивалентно, "(32-1)+1+(1-1)×4=32".
Затем, посредством вычислений, блок 21 вычисления предоставляет идентификационный адрес "192.168.100.32", являющийся адресом, включающим в себя частичный адрес pADa начальной точки "192.168.100", и вычисленный конечный адрес fAD (32), которые соединяются друг с другом точкой (.).
В качестве другого примера, нижеследующее описывает процедуры для вычисления конечного адреса fAD ведущего устройства при предварительном условии E2. Предварительное условие E2 отличается от предварительного условия E1 только в том, что правилом задания идентификационной информации является правило вертикального задания. Предварительное условие E2 кроме вышеуказанного аспекта является таким же как предварительное условие E1.
При предварительном условии E2, обработка выполняется в указанном порядке этапов S231 и S232NB. При обработке N2 по вычислению на этапе S232NB, блок 21 вычисления предоставляет 32 в качестве конечного адреса fAD посредством выражения, полученного посредством подстановки значений (fADa=32, HL=1, Vm=3, и VL=1) при предварительном условии E2 в выражение (12), или эквивалентно, (32-1)+(1-1)×3+1=32.
Затем, посредством вычислений, блок 21 вычисления предоставляет идентификационный адрес "192.168.100.32" являющийся адресом, включающим в себя частичный адрес pADa начальной точки
"192.168.100", и вычисленный конечный адрес fAD (32), которые соединяются друг с другом точкой (.).
Как описано выше, при обработке NM по вычислению идентификационной информации, блок 21 вычисления вычисляет конечный адрес fAD и идентификационный адрес, являющиеся идентификационной информацией, на основе правила задания идентификационной информации с использованием выражения (11) или выражения (12). После окончания обработки NM по вычислению идентификационной информации, обработка возвращается к обработке NM соответствия задания идентификационной информации на Фиг. 19, и выполняется обработка на этапе S241A.
На этапе S241A выполняется обработка NM по заданию идентификационной информации. При обработке NM по заданию идентификационной информации, блок 22 задания из блока 20 управления выполняет обработку для задания идентификационного адреса устройства отображения видео (ведущее устройство) с вычисленными координатами P рассматриваемому устройству отображения видео (ведущему устройству). В частности, блок 22 задания предписывает запоминающему блоку 32 сохранить идентификационный адрес, вычисленный при обработке NM по вычислению идентификационной информации. Следовательно, идентификационный адрес задается ведущему устройству.
На этапе S242, обработка выполняется как в первом предпочтительном варианте осуществления. Таким образом, блок 22 задания выполняет обработку для задания координат P устройства отображения видео (ведущего устройства) с вычисленными координатами P рассматриваемому устройству отображения видео (ведущему устройству).
На этапе S243 блок 21 вычисления (блок 20 управления) увеличивает значение счетчика CT на 1. Таким образом, значение счетчика CT составляет 1.
На этапе S244A блок 20 управления отправляет команду N выполнения задания идентификационной информации всем ведомым устройствам. Команда N выполнения задания идентификационной информации является командой для предписания ведомому устройству задать идентификационный адрес, являющийся идентификационной информацией. Другими словами, команда N выполнения задания идентификационной информации является командой для предписания ведомому устройству выполнить обработку (в дальнейшем также называемую "обработкой NS соответствия задания идентификационной информации") для задания идентификационного адреса. Команда N выполнения задания идентификационной информации является также командой для переключения режима функционирования ведомого устройства на режим задания идентификационной информации.
В частности, блок 20 управления ведущего устройства отправляет команду N выполнения задания идентификационной информации, причем заданными целями доставки являются все ведомые устройства, в ведомое устройство (устройство 100-2 отображения видео), которое идет вторым в последовательности передачи. Команда N выполнения задания идентификационной информации указывает частичный адрес pADa начальной точки и временно присвоенный конечный адрес fAD. В качестве примера, предполагается, что число 256 задается в качестве значения временно присвоенного конечного адреса fAD. Таким образом, команда N выполнения задания идентификационной информации отправляется во все ведомые устройства по каналу SK связи согласно вышеупомянутой последовательности передачи.
Следовательно, в каждом из ведомых устройств, блок 20 управления принимает команду N выполнения задания идентификационной информации. В частности, блок 33 обработки связи принимает команду N выполнения задания идентификационной информации от предыдущего смежного устройства 100 отображения видео (ведущего устройства или ведомого устройства) через входной контакт 35a. Блок 33 обработки связи отправляет принятую команду N выполнения задания идентификационной информации в блок 20 управления и на выходной контакт 35b. Блок 20 управления таким образом принимает команду N выполнения задания идентификационной информации.
Значение временно присвоенного конечного адреса fAD, указанного командой N выполнения задания идентификационной информации, не ограничивается значением 256 и может быть любым числом, отличным от чисел (0-255), которые могут быть фактически заданы в качестве конечного адреса fAD.
Блок 20 управления индивидуального ведомого устройства выполняет обработку NS соответствия задания идентификационной информации после приема команды N выполнения задания идентификационной информации. Фиг. 21 является схемой последовательности операций обработки NS соответствия задания идентификационной информации. Со ссылкой на Фиг. 21, обработка на этапах, обозначенных такими же номерами, как этапы на Фиг. 15, выполняется как описано в первом предпочтительном варианте осуществления, и ее подробное описание не повторяется. Нижеследующее в основном описывает аспекты, отличные от первого предпочтительного варианта осуществления. Сначала, обработка на этапе S311A выполняется при обработке NS соответствия задания идентификационной информации.
На этапе S311A, идентификационный адрес fAD задается в значение 256. В частности, блок 20 управления предписывает запоминающему блоку 32 сохранить временно присвоенный конечный адрес fAD (256), указанный принятой командой N выполнения задания идентификационной информации. Более конкретно, блок 20 управления предписывает запоминающему блоку 32 сохранить временно присвоенный идентификационный адрес, включающий в себя частичный адрес pADa начальной точки, указанный командой N выполнения задания идентификационной информации, и временно присвоенный конечный адрес fAD, указанный командой N выполнения задания идентификационной информации, которые соединяются друг с другом точкой (.). То есть, конечным адресом fAD временно присвоенного идентификационного адреса, хранящегося в запоминающем блоке 32, является 256.
В качестве примера, предполагается, что частичным адресом pADa начальной точки является "192.168.100", и временно присвоенным конечным адресом fAD является 256. В этом случае, временно присвоенным идентификационным адресом, хранящимся в запоминающем блоке 32, является "192.168.100.256".
На этапе S312A выполняется обработка по переключению режима задания. При обработке по переключению режима задания, блок 20 управления переключает режим функционирования ведомого устройства с вышеупомянутого обычного режима на режим задания идентификационной информации в соответствии с командой N выполнения задания идентификационной информации.
На этапе S313, обработка выполняется как в первом предпочтительном варианте осуществления.
В ведущем устройстве, за обработкой на этапе S244A следует этап S245. Ведомое устройство, чей конечный адрес fAD идентификационного адреса задан в значение 256, в дальнейшем также называется "целевым ведомым устройством".
На этапе S245, обработка выполняется как в первом предпочтительном варианте осуществления.
Таким образом, команда запроса индивидуальной информации отправляется всем целевым ведомым устройствам согласно вышеупомянутой последовательности передачи.
После приема команды запроса индивидуальной информации, целевое ведомое устройство выполняет обработку на этапе S321.
На этапе S321, обработка по отправке индивидуальной информации выполняется как в первом предпочтительном варианте осуществления.
Как описано выше, ведомое устройство, соответствующее индивидуальной информации, принятой ведущим устройством, в дальнейшем также называется "ответным ведомым устройством". В случае, когда обработка по отправке индивидуальной информации выполняется в первый раз, ответное ведомое устройство относится только к устройству 100-2 отображения видео.
После приема индивидуальной информации, ведущее устройство выполняет обработку на этапе S260. На этапе S260 выполняется обработка по вычислению координат на Фиг. 12. Координаты P ответного ведомого устройства вычисляются посредством обработки по вычислению координат. Пример вычисления координат P ответного ведомого устройства будет описан позднее.
На этапе S270A выполняется обработка NM по вычислению идентификационной информации на Фиг. 20. Идентификационный адрес ответного ведомого устройства вычисляется
посредством обработки NM по вычислению идентификационной информации. Пример вычисления идентификационного адреса ответного ведомого устройства будет описан позднее.
На этапе S281A выполняется обработка по управлению заданием информации NP. Обработка по управлению заданием информации NP является обработкой для задания, посредством блока 22 задания, идентификационного адреса устройства отображения видео (ответного ведомого устройства) с вычисленными координатами P рассматриваемому устройству отображения видео. Обработка по управлению заданием информации NP является также обработкой для задания, посредством блока 22 задания, координат P устройства отображения видео (ответного ведомого устройства) с вычисленными координатами P рассматриваемому устройству отображения видео (ответному ведомому устройству).
В частности, при обработке по управлению заданием информации NP, блок 22 задания отправляет команду задания информации ответному ведомому устройству. Команда задания информации является командой для задания вычисленного идентификационного адреса и вычисленных координат P ответного ведомого устройства ответному ведомому устройству. Команда задания информации указывает идентификационный адрес и координаты P ответного ведомого устройства. Команда задания информации также указывает индивидуальную информацию ответного ведомого устройства, принятую ведущим устройством.
В ответном ведомом устройстве, блок 20 управления принимает команду задания информации на этапе S331.
На этапе S332, обработка выполняется как в первом предпочтительном варианте осуществления. Если этап S332 дает в результате ДА, обработка переходит на этап S333A. Если этап S332 дает в результате НЕТ, обработка переходит на этап S334B.
На этапе S333A выполняется обработка по заданию информации NP. При обработке по заданию информации NP, блок 22 задания задает идентификационный адрес, указанный принятой командой задания информации, собственному устройству (ответному ведомому устройству). В частности, блок 22 задания изменяет временно присвоенный идентификационный адрес, хранящийся в запоминающем блоке 32, на идентификационный адрес, указанный команде задания информации.
Блок 22 задания задает координаты P, указанные принятой командой задания информации, собственному устройству (ответному ведомому устройству). В частности, блок 22 задания предписывает запоминающему блоку 32 сохранить координаты P, указанные командой задания информации.
На этапе S334A блок 20 управления (блок 22 задания) отправляет уведомление о завершении ведущему устройству. Уведомление о завершении является уведомлением, что задание идентификационного адреса и координат было завершено.
На этапе S335, обработка по переключению на обычный режим выполняется как в первом предпочтительном варианте осуществления. Затем обработка NS соответствия задания идентификационной информации завершается.
Если этап S332 дает в результате НЕТ, обработка на этапе S334B выполняется как в первом предпочтительном варианте осуществления.
После приема уведомления о завершении или уведомления об ошибке посредством вышеописанной обработки, ведущее устройство выполняет обработку на этапе S282.
На этапе S282, обработка выполняется как в первом предпочтительном варианте осуществления. Если блок 20 управления принимает уведомление о завершении, обработка переходит на этап S291. Если блок 20 управления принимает уведомление об ошибке, обработка NM соответствия задания идентификационной информации заканчивается.
Как описано выше, число устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения, также называется "составляющим числом C" или "C".
На этапе S291, обработка выполняется как в первом предпочтительном варианте осуществления.
Если этап S291 дает в результате ДА, обработка NM соответствия задания идентификационной информации заканчивается. Для ДА на этапе S291, задание координат P и идентификационного адреса было завершено для всех устройств 100 отображения видео, включенных в многоэкранное устройство 1000 отображения. Между тем, для НЕТ на этапе S291 обработка переходит на этап S292.
На этапе S292 блок 21 вычисления увеличивает значение счетчика CT на 1. Затем, обработка на этапе S245 выполняется снова.
В случае, когда блоку 20 управления длительное время не удается принять уведомление об ошибке или значение счетчика CT продолжает быть меньше, чем "С-1", посредством обработки NM соответствия задания идентификационной информации, описанной выше, обработка на этапах S245-S292 выполняется повторно. Таким образом, этап S281A выполняется повторно. Этап S281A выполняется повторно, так чтобы блок 22 задания выполнил обработку для задания идентификационного адреса каждого из устройств отображения видео (ответных ведомых устройств) с вычисленными координатами P рассматриваемому устройству отображения видео (ответному ведомому устройству). Этап S281A выполняется повторно, так чтобы блок 22 задания выполнил обработку для задания координат P каждого из устройств отображения видео (ответных ведомых устройств) с вычисленными координатами P рассматриваемому устройству отображения видео (ответному ведомому устройству).
Каждый раз, когда выполняется обработка на этапах S245-S292, число целевых ведомых устройств уменьшается.
Каждый раз, когда выполняется обработка на этапах S245-S292, выполняется обработка A, описанная ниже. При обработке A, команда запроса индивидуальной информации отправляется каждому из целевых ведомых устройств посредством этапа S245. При обработке A, после приема команды запроса индивидуальной информации, целевые ведомые устройства выполняют обработку на этапе S321.
Например, в случае, когда выполняется второй цикл обработки на этапе S245, ведущее устройство принимает индивидуальную информацию устройства 100-3 отображения видео только от устройства 100-3 отображения видео. В этом случае, ответное ведомое устройство относится только к устройству 100-3 отображения видео. В этом случае, значение счетчика CT, используемое для вычисления координат P и идентификационного адреса устройства 100-3 отображения видео, составляет 2.
То есть, посредством обработки NM соответствия задания идентификационной информации, описанной выше, ведущее устройство увеличивает значение счетчика CT, и наряду с увеличением, задает координаты P и идентификационный адрес каждому из ведомых устройств согласно последовательности передачи.
Если "CT=С - 1" удовлетворяется (ДА на этапе S291), ведущее устройство определяет, что задание идентификационного адреса было завершено для устройств отображения видео, включающих в себя оконечное устройство отображения видео, упомянутое выше, и обработка NM соответствия задания идентификационной информации заканчивается.
Нижеследующее описывает процедуры для вычисления координат P и идентификационных адресов ведомых устройств. Ведомое устройство, чьи координаты P и идентификационный адрес должны быть вычислены, в дальнейшем также называется "целевым для вычисления ведомым устройством". Сначала, нижеследующее описывает процедуры для вычисления координат P и идентификационного адреса целевого для вычисления ведомого устройства при нижеследующем предварительном условии F1.
При предварительном условии F1, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами, как показано на Фиг. 2. При предварительном условии F1, целевым для вычисления ведомым устройством является устройство 100-6 отображения видео. При предварительном условии F1, CT составляет 5. При предварительном условии F1, горизонтальное число Hm составляет 4, и вертикальное число Vm составляет 3. При предварительном условии F1, ведущее устройство размещается в верхнем левом конце LT. Таким образом, как показано в части (a) на Фиг. 13, горизонтально смежным направлением является направление +H, и вертикально смежным направлением является направление +V. При предварительном условии F1, конфигурацией кабельного соединения является конфигурация горизонтального соединения. При предварительном условии F1, правилом задания идентификационной информации является правило горизонтального задания. При предварительном условии F1, конечным адресом fADa начальной точки является 32. При предварительном условии F1, частичным адресом pADa начальной точки является "192.168.100".
Процедуры для вычисления координат P при вышеупомянутом предварительном условии F1 являются такими же как процедуры в первом предпочтительном варианте осуществления, и их подробное описание не повторяется. При предварительном условии F2, вычисления посредством обработки на Фиг. 12 дают координаты P (2, 2) в качестве координат устройства 100-6 отображения видео, являющегося ведомым устройством.
Далее, нижеследующее описывает процедуры для вычисления идентификационного адреса при предварительном условии F1. При предварительном условии F1, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232NA на Фиг. 20.
При обработке N1 по вычислению на этапе S232NA, блок 21 вычисления предоставляет 38 в качестве конечного адреса fAD посредством выражения, полученного посредством подстановки значений (fADa=32, HL=3, VL=2, и Hm=4) при предварительном условии F1 в выражение (11), или эквивалентно, "(32-1)+3+(2-1)×4=38".
Затем, посредством вычислений, блок 21 вычисления предоставляет идентификационный адрес "192.168.100.38", являющийся адресом, включающим в себя частичный адрес pADa начальной точки "192.168.100", и вычисленный конечный адрес fAD "38", которые соединяются друг с другом точкой (.).
Далее, в качестве другого примера, нижеследующее описывает процедуры для вычисления координат P и идентификационного адреса целевого для вычисления ведомого устройства при предварительном условии F2. Предварительное условие F2 отличается от предварительного условия F1 только в том, что ведущее устройство размещается в верхнем правом конце RT вместо размещения в верхнем левом конце LT. Предварительное условие F2 кроме вышеуказанного аспекта является таким же как предварительное условие F1. При предварительном условии F2, горизонтально смежным направлением является направление -H.
Далее, нижеследующее описывает процедуры для вычисления идентификационного адреса при предварительном условии F2. При предварительном условии F2, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232NA на Фиг. 20. При обработке N1 по вычислению на этапе S232NA, блок 21 вычисления предоставляет 37 в качестве конечного адреса fAD посредством выражения, полученного посредством подстановки значений (fADa=32, HL=2, VL=2, и Hm=4) при предварительном условии F2 в выражение (11), или эквивалентно, "(32-1)+2+(2-1)×4=37".
Затем, посредством вычислений, блок 21 вычисления предоставляет идентификационный адрес "192.168.100.37" являющийся адресом, включающим в себя частичный адрес pADa начальной точки "192.168.100", и вычисленный конечный адрес fAD "37", которые соединяются друг с другом точкой (.).
В качестве другого примера, нижеследующее описывает процедуры для вычисления координат P и идентификационного адреса целевого для вычисления ведомого устройства при предварительном условии F3. Предварительное условие F3 отличается от предварительного условия F1 только в том, что целевым для вычисления ведомым устройством является устройство 100-9 отображения видео. Предварительное условие F3 кроме вышеуказанного аспекта является таким же как предварительное условие F1. При предварительном условии F3, CT составляет 8.
Процедуры для вычисления координат P при вышеупомянутом предварительном условии F3 являются аналогичными процедурам в первом предпочтительном варианте осуществления, и их подробное описание не повторяется. При предварительном условии F3, вычисления посредством обработки на Фиг. 12 дают координаты P (1, 3) в качестве координат устройства 100-9 отображения видео, являющегося ведомым устройством.
Далее, нижеследующее описывает процедуры для вычисления идентификационного адреса при предварительном условии F3. При предварительном условии F3, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232NA на Фиг. 20. При обработке N1 по вычислению на этапе S232NA, блок 21 вычисления предоставляет 40 в качестве конечного адреса fAD посредством выражения, полученного посредством подстановки значений (fAD=32, HL=1, VL=3, и Hm=4) при предварительном условии F3 в выражение (11), или эквивалентно, "(32-1)+1+(3 1)×4=40".
Затем, посредством вычислений, блок 21 вычисления предоставляет идентификационный адрес "192.168.100.40" являющийся адресом, включающим в себя частичный адрес pADa начальной точки "192.168.100", и вычисленный конечный адрес fAD "40", которые соединяются друг с другом точкой (.).
Далее, в качестве другого примера, нижеследующее описывает процедуры для вычисления координат P и идентификационного адреса целевого для вычисления ведомого устройства при предварительном условии F4.
При предварительном условии F4, двенадцать устройств 100 отображения видео скомпонованы в матрицу, являющуюся матрицей MX, с тремя рядами и четырьмя столбцами, как показано на Фиг. 9. При предварительном условии F4, целевым для вычисления ведомым устройством является устройство 100-10 отображения видео. При предварительном условии F4, CT составляет 9. При предварительном условии F4, горизонтальное число Hm составляет 4, и вертикальное число Vm составляет 3. При предварительном условии F4, ведущее устройство размещается в верхнем левом конце LT. Таким образом, как показано в части (a) на Фиг. 13, горизонтально смежным направлением является направление +H, и вертикально смежным направлением является направление +V. При предварительном условии F4, конфигурацией кабельного соединения является конфигурация вертикального соединения. При предварительном условии F4, правилом задания идентификационной информации является правило горизонтального задания. При предварительном условии F4, конечным адресом fADa начальной точки является 32. При предварительном условии F4, частичным адресом pADa начальной точки является "192.168.100".
Процедуры для вычисления координат P при вышеупомянутом предварительном условии F4 являются аналогичными процедурам в первом предпочтительном варианте осуществления, и их подробное описание не повторяется. При предварительном условии F4, вычисления посредством обработки на Фиг. 12 дают координаты P (4, 3) в качестве координат устройства 100-10 отображения видео, являющегося ведомым устройством.
Далее, нижеследующее описывает процедуры для вычисления идентификационного адреса при предварительном условии F4. При предварительном условии F4, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232NA на Фиг. 20. При обработке N1 по вычислению на этапе S232NA, блок 21 вычисления предоставляет 43 в качестве конечного адреса fAD посредством выражения, полученного посредством подстановки значений (fADa=32, HL=4, VL=3, и Hm=4) при предварительном условии F4 в выражение (11), или эквивалентно, "(32-1)+4+(3 1)×4=43".
Затем, посредством вычислений, блок 21 вычисления предоставляет идентификационный адрес "192.168.100.43" являющийся адресом, включающим в себя частичный адрес pADa начальной точки "192.168.100", и вычисленный конечный адрес fAD "43", которые соединяются друг с другом точкой (.).
В качестве другого примера, нижеследующее описывает процедуры для вычисления координат P и идентификационного адреса целевого для вычисления ведомого устройства при предварительном условии F5. Предварительное условие F5 отличается от предварительного условия F4 только в том, что целевым для вычисления ведомым устройством является устройство 100-7 отображения видео. Предварительное условие F5 кроме вышеуказанного аспекта является таким же как предварительное условие F4. При предварительном условии F5, CT составляет 6.
Процедуры для вычисления координат P при вышеупомянутом предварительном условии F5 являются аналогичными процедурам в первом предпочтительном варианте осуществления, и их подробное описание не повторяется. При предварительном условии F5, вычисления посредством обработки на Фиг. 12 дают координаты P (3, 1) в качестве координат устройства 100-7 отображения видео, являющегося ведомым устройством.
Далее, нижеследующее описывает процедуры для вычисления идентификационного адреса при предварительном условии F5. При предварительном условии F5, правилом задания идентификационной информации является правило горизонтального задания, и таким образом, обработка выполняется в указанном порядке этапов S231 и S232NA на Фиг. 20. При обработке N1 по вычислению на этапе S232NA, блок 21 вычисления предоставляет 34 в качестве конечного адреса fAD посредством выражения, полученного посредством подстановки значений (fADa=32, HL=3, VL=1, и Hm=4) при предварительном условии F5 в выражение (11), или эквивалентно, "(32-1)+3+(1 1)×4=34".
Затем, посредством вычислений, блок 21 вычисления предоставляет идентификационный адрес "192.168.100.34" являющийся адресом, включающим в себя частичный адрес pADa начальной точки "192.168.100", и вычисленный конечный адрес fAD "34", которые соединяются друг с другом точкой (.).
Как описано в первом предпочтительном варианте осуществления, вычисления дают координаты P (1, 1) в качестве координат ведущего устройства при предварительном условии D1.
При предварительном условии D1, ведущее устройство размещается в верхнем левом конце LT. При предварительном условии D1, конфигурацией кабельного соединения является конфигурация вертикального соединения. Как описано выше, вычисления дают "192.168.100.32" в качестве идентификационного адреса ведущего устройства при предварительном условии E1.
Предполагается, что координаты P и идентификационный адрес вычисляются при условии, что целевым устройством вычисления при предварительном условии F4 является любое одно из устройств 100-2, 100-3, 100-4, 100-5, 100-6, 100-8, 100-9, 100-11 и 100-12 отображения видео. Затем, предполагается, что координаты P и идентификационные адреса индивидуальных устройств 100 отображения видео, вычисленные как описано выше, координаты P и идентификационный адрес устройства 100-10 отображения видео, полученные при вышеупомянутом предварительном условии F4, координаты P и идентификационный адрес устройств 100-7 отображения видео, полученные при вышеупомянутом предварительном условии F5, и координаты P и идентификационный адрес устройства 100-1 отображения видео задаются соответствующим устройствам отображения видео из устройств 100 отображения видео посредством обработки на Фиг. 19 и Фиг. 21.
В этом случае, идентификационные адрес и координаты P индивидуальных устройств 100 отображения видео являются такими как показано на Фиг. 22. Фиг. 22 иллюстрирует состояние, в котором идентификационный адрес и координаты P, заданные индивидуальному устройству 100 отображения видео, отображаются на экране 10 рассматриваемого индивидуального устройства 100 отображения видео.
Как описано выше, в этом предпочтительном варианте осуществления, блок 21 вычисления ведущего устройства (опорного устройства отображения видео), которое идет первым в последовательности передачи, вычисляет координаты P множества устройств 100 отображения видео на полиэкране 10A на основе информации KJ компоновки и вышеупомянутой последовательности передачи. Блок 21 вычисления вычисляет идентификационный адрес на основе правила N задания идентификационной информации. Блок 22 задания выполняет обработку для задания идентификационного адреса каждого из устройств 100 отображения видео с вычисленными координатами P рассматриваемому устройству 100 отображения видео.
Например, это устраняет необходимость вычисления координат P устройств 100 отображения видео для обыкновенного устройства формирования изображения и подобного. Таким образом, координаты P устройств 100 отображения видео могут быть вычислены посредством простой конфигурации. Это способствует вычислению координат P и идентификационных адресов индивидуальных устройств 100 отображения видео. Как описано выше, блок 22 задания выполняет обработку для задания идентификационного адреса каждого из устройств 100 отображения видео с вычисленными координатами P рассматриваемому устройству 100 отображения видео. Таким образом, идентификационные адреса могут быть заданы устройствам 100 отображения видео посредством простой конфигурации.
Этот предпочтительный вариант осуществления способствует вычислению координат P и идентификационных адресов индивидуальных устройств 100 отображения видео без использования специального устройства, такого как обыкновенное устройство формирования изображения. Это также способствует заданию вычисленных координат P и вычисленных идентификационных адресов.
В этом предпочтительном варианте осуществления, ведущее устройство размещается в любом одном из четырех углов полиэкрана 10A как в первом предпочтительном варианте осуществления. Блок 21 вычисления ведущего устройства вычисляет координаты P на основе расположения ведущего устройства. Таким образом, ведущее устройство, размещенное в любом одном из четырех углов полиэкрана 10A, может легко вычислить координаты P.
Этот предпочтительный вариант осуществления обеспечивает задание идентификационных адресов индивидуальным устройствам отображения видео в последовательности согласно горизонтальному растровому сканированию или вертикальному растровому сканированию. То есть, каждое из устройств 100 отображения видео, скомпонованных в матрицу и соединенных посредством гирляндного соединения, может легко задать идентификационный адрес рассматриваемому устройству 100 отображения видео на основе правила задания идентификационной информации, заданного, чтобы упростить оператору (человеку) распознавание идентификационного адреса без использования последовательности передачи, которая следует гирляндному соединению.
В этом предпочтительном варианте осуществления, координаты P и идентификационные адреса, вычисленные блоком 21 вычисления ведущего устройства, задаются индивидуальным ведомым устройствам. Это устраняет необходимость ручного задания оператором координат P и идентификационных адресов индивидуальным устройствам отображения видео.
В этом предпочтительном варианте осуществления, ведущее устройство может автоматически вычислить координаты P и идентификационные адреса и может также автоматически задать вычисленные координаты P и вычисленные идентификационные адреса индивидуальным устройствам 100 отображения видео, которые соединены посредством гирляндного соединения.
При первоначальной установке обыкновенного многоэкранного устройства отображения, все устройства отображения видео, включенные в многоэкранное устройство отображения, имеют сконфигурированные при изготовлении координаты и сконфигурированные при изготовлении идентификационные адреса, другими словами, одинаковые координаты и одинаковый идентификационный адрес. В этом случае, устройства отображения видео имеют одинаковый идентификационный номер, делая невозможным задание, например, координат посредством внешнего устройства, такого как PC. Таким образом, оператор должен задать координаты и идентификационный адрес каждому из устройств отображения видео, например, через сеть.
Между тем, в этом предпочтительном варианте осуществления, оператор задает значения по умолчанию только ведущему устройству посредством внешнего устройства 5 управления, тем самым координаты и идентификационные адреса автоматически задаются индивидуальным устройствам 100 отображения видео, включенным в многоэкранное устройство 1000 отображения. Это может значительно уменьшить время регулирования, требуемое при установке многоэкранного устройства 1000 отображения.
В обыкновенной конфигурации, идентификационный адрес задается каждому из устройств отображения видео в вышеупомянутой последовательности передачи на основе гирляндного соединения. Следовательно, идентификационные адреса не следуют последовательности согласно горизонтальному растровому сканированию или вертикальному растровому сканированию.
Между тем, в этом предпочтительном варианте осуществления, идентификационный адрес автоматически задается каждому из устройств 100 отображения видео в последовательности согласно горизонтальному растровому сканированию или вертикальному растровому сканированию. Это обеспечивает простое для понимания соответствие между идентификационным адресом и координатами P устройства 100 отображения видео при управлении многоэкранным устройством 1000 отображения. Это также предотвращает, например, возникновение ошибок управления при регулировании и функционировании многоэкранного устройства 1000 отображения.
В этом предпочтительном варианте осуществления, ведущее устройство, размещенное в любом одном из четырех углов полиэкрана 10A, может уникально задать координаты P и идентификационный адрес устройства 100 отображения видео. Таким образом, в многоэкранном устройстве 1000 отображения, устройство 100 отображения видео в верхнем левом конце необязательно задано в качестве ведущего устройства. То есть, устройство 100 отображения видео, размещенное ближе всего к внешнему устройству 5 управления, может быть задано в качестве ведущего устройства.
Для обыкновенного задания идентификационных адресов в конфигурации, в которой индивидуальные устройства отображения видео соединены посредством гирляндного соединения, например, посредством последовательных кабелей, идентификационные адреса задаются согласно последовательности передачи на основе гирляндного соединения. Родственная область техники В требует устройство формирования изображения, такое как камера, для обнаружения расположений индивидуальных устройств отображения видео в многоэкранном устройстве отображения, включающем в себя индивидуальные устройства отображения видео, скомпонованные в матрицу. Это, к сожалению, увеличивает стоимость.
Этот предпочтительный вариант осуществления с вышеописанной конфигурацией может решить вышеупомянутые проблемы.
(Другие модификации)
Вышеуказанное описание было дано в отношении многоэкранного устройства отображения (устройств отображения видео) согласно настоящему изобретению на основе его предпочтительных вариантов осуществления. Между тем, настоящее изобретение не ограничивается вышеуказанными предпочтительными вариантами осуществления. Настоящее изобретение включает в себя изменение, внесенное в вышеуказанные предпочтительные варианты осуществления специалистами в данной области техники без отступления от объема настоящего изобретения. В настоящем изобретении, каждый предпочтительный вариант осуществления может быть соответствующим образом изменен или опущен в рамках объема данного изобретения.
Например, многоэкранное устройство 1000 отображения может исполнить, последовательно, обработку в первом предпочтительном варианте осуществления и обработку во втором предпочтительном варианте осуществления. Обработка в первом предпочтительном варианте осуществления относится, например, к обработке на Фиг. 11, 12, 14, и 15. Обработка во втором предпочтительном варианте осуществления относится, например, к обработке на Фиг. 19, 12, 20, и 21.
Опорное устройство отображения видео (устройство 100 отображения видео), включенное в многоэкранное устройство отображения согласно настоящему изобретению, в дальнейшем также называется "устройством hz отображения видео".
Например, устройство hz отображения видео необязательно включают в себя все из составляющих элементов, показанных на Фиг. 4. Требуется, только чтобы устройство hz отображения видео включало в себя минимум составляющих компонентов для эффектов настоящего изобретения. Например, если блок 20 управления выполнен с возможностью выполнения обработки, выполняемой блоком 33 обработки связи, устройству hz отображения видео не требуется включать в себя блок 33 обработки связи.
Функции блока 21 вычисления и блока 22 задания, включенных в устройство hz отображения видео, могут быть реализованы схемой обработки. То есть, устройство hz отображения видео включает в себя схему обработки для вычисления координат множества устройств отображения видео на полиэкране на основе последовательности передачи и информации компоновки для точного определения конфигурации компоновки множества устройств отображения видео, для вычисления идентификационного номера для идентифицирования каждого из множества устройств отображения видео на основе предварительно определенного правила для задания идентификационного номера каждому из множества устройств отображения видео, и для выполнения обработки для задания идентификационного номера каждого из множества устройств отображения видео с вычисленными координатами рассматриваемому устройству отображения видео.
Схема обработки может быть выделенным аппаратным средством. Схемой обработки может быть процессором, который выполняет программу, хранящуюся в памяти. Процессором является, например, центральный процессор (CPU), арифметический блок, микропроцессор, микрокомпьютер или процессор цифровой обработки сигналов (DSP).
Конфигурация, в которой выделенное аппаратное средство служит в качестве схемы обработки, в дальнейшем также называется "конфигурацией Cs1". Конфигурация, в которой процессор служит в качестве схемы обработки, в дальнейшем также называется "конфигурацией Cs2". Конфигурация, в которой функции блока 21 вычисления и блока 22 задания реализованы посредством комбинации аппаратных средств и программного обеспечения, в дальнейшем также называется "конфигурацией Cs3".
В конфигурации Cs1, схема обработки относится, например, к одиночной схеме, составной схеме, программируемому процессору, параллельно программируемому процессору, специализированной интегральной микросхеме (ASIC), программируемой пользователем вентильной матрице (FPGA) или комбинации вышеуказанного. Функции блока 21 вычисления и блока 22 задания могут быть реализованы посредством соответствующих блоков из двух блоков схемы обработки. Все функции блока 21 вычисления и блока 22 задания могут быть реализованы одним блоком схемы обработки.
В качестве примера, нижеследующее описывает конфигурация, в которой все или часть составляющих компонентов устройства hz отображения видео указаны как аппаратные средства. Устройство отображения видео, представляющее все или часть составляющих компонентов устройства hz отображения видео как аппаратные средства, в дальнейшем называется "устройством отображения видео hd10".
Фиг. 23 является схемой конфигурации аппаратных средств устройства отображения видео hd10. Со ссылкой на Фиг. 23, устройство отображения видео hd10 включает в себя процессор hd1 и память hd2. Память hd2 является энергозависимой или энергонезависимой полупроводниковой памятью, такой как оперативная память (RAM), постоянная память (ROM), flash-память, стираемая программируемая постоянная память (EPROM), или электрически стираемая программируемая постоянная память (EEPROM). Памятью hd2 является, например, магнитный диск, гибкий диск, оптический диск, компакт-диск, минидиск, или DVD.
В конфигурации Cs2, процессор hd1 служит в качестве схемы обработки. Процессором hd1 является схема 20 управления устройства hz отображения видео. В конфигурации Cs2, функции блока 21 вычисления и блока 22 задания реализованы посредством программного обеспечения, программно-аппаратных средств, или комбинации программного обеспечения и программно аппаратных средств. Программное обеспечение или программно-аппаратные средства описаны как программа и хранятся в памяти hd2.
В конфигурации Cs2, схема обработки (процессор hd1) считывает программу, хранящуюся в памяти hd2, и затем исполняет программу, тем самым реализуя функции блока 21 вычисления и блока 22 задания. То есть, память hd2 хранит программу, описанную ниже.
Вышеупомянутая программа является программой для предписания схеме обработки (процессору hd1) выполнить этап для вычисления координат множества устройств отображения видео на полиэкране на основе последовательности передачи и информации компоновки для точного определения конфигурации компоновки множества устройств отображения видео, этап для вычисления идентификационного номера для идентифицирования каждого из множества устройств отображения видео на основе предварительно определенного правила для задания идентификационного номера каждому из множества устройств отображения видео, и этап для выполнения обработки для задания идентификационного номера каждого из множества устройств отображения видео с вычисленными координатами рассматриваемому устройству отображения видео.
Вышеупомянутая программа предписывает компьютеру реализовать, например, процедуры обработки, выполняемые каждым из блока 21 вычисления и блока 22 задания, и способ для выполнения обработки.
В конфигурации Cs3, часть функций блока 21 вычисления и блока 22 задания реализована посредством выделенных аппаратных средств. В конфигурации Cs3, часть оставшихся функций блока 21 вычисления и блока 22 задания реализована посредством программного обеспечения или программно-аппаратных средств.
Например, схема обработки считывает и исполняет программу, хранящуюся в памяти, тем самым реализуя функцию блока 21 вычисления. Например, схема обработки, являющаяся выделенным аппаратным средством, реализует функцию блока 22 задания.
Как и в вышеупомянутых конфигурациях Cs1, Cs2 и Cs3, схема обработки может реализовать каждую из функций, описанных выше, посредством аппаратных средств, программного обеспечения, программно-аппаратных средств, или комбинации вышеуказанного.
Настоящее изобретение может быть реализовано как способ задания идентификационного номера или способ задания идентификационного адреса, включающий в себя этапы операций отличительных составляющих компонентов устройства hz отображения видео. В настоящем изобретении, каждый этап, включенный в способ задания идентификационного номера или способ задания идентификационного адреса, может быть выполнен компьютером. В настоящем изобретении, каждый этап включенный в способ задания идентификационного номера или способ задания идентификационного адреса, может быть реализован как программа, которая должна быть выполнена компьютером. Настоящее изобретение может быть реализовано как компьютерно-читаемый носитель информации, который хранит программу. Программа может распространяться через среду передачи, такую как Интернет.
Способ задания идентификационного номера согласно настоящему изобретению эквивалентен обработке BM соответствия задания идентификационной информации на Фиг. 11. Последовательность, в которой выполняется каждая обработка в способе задания идентификационного номера, является примером для конкретного описания настоящего изобретения и не ограничивается вышеописанной последовательностью. Часть обработки в способе задания идентификационного номера может независимо выполняться параллельно с оставшейся частью обработки.
Способ задания идентификационного адреса согласно настоящему изобретению эквивалентен обработке NM соответствия задания идентификационной информации на Фиг. 19. Последовательность, в которой выполняется каждая обработка в способе задания идентификационного адреса, является примером для конкретного описания настоящего изобретения и не ограничивается вышеописанной последовательностью. Часть обработки в способе задания идентификационного адреса может независимо выполняться параллельно с оставшейся частью обработки.
Все значения, упомянутые в вышеуказанных предпочтительных вариантах осуществления, являются примерами для конкретного описания настоящего изобретения. То есть, в настоящем изобретении, значения не ограничиваются значениями, упомянутыми в вышеуказанных вариантах осуществления.
В настоящем изобретении, каждый предпочтительный вариант осуществления может быть соответствующим образом изменен или опущен в рамках объема данного изобретения. Например, как идентификационные номера i, так и координаты P задаются индивидуальным устройствам 100 отображения видео в первом предпочтительном варианте осуществления, который не ограничен этим. Например, индивидуальным устройствам 100 отображения видео могут быть заданы только идентификационные номера i.
Например, как идентификационный адрес, так и координаты P задаются индивидуальным устройствам 100 отображения видео во втором предпочтительном варианте осуществления, который не ограничен этим. Например, индивидуальным устройствам 100 отображения видео могут быть заданы только идентификационные адреса.
Устройство 100 отображения видео в первом предпочтительном варианте осуществления, показанном на Фиг. 4, включает в себя только один контакт 34 внешнего управления в качестве интерфейса для связи по сети. В качестве альтернативы, число контактов 34 внешнего управления, включенных в устройство 100 отображения видео, может составлять два или более в другой конфигурации (конфигурации X1).
Хотя данное изобретение было показано и описано подробно, вышеприведенное описание является во всех аспектах иллюстративным и неограничительным. Вследствие этого понятно, что многочисленные модификации и вариации могут быть разработаны без отступления от объема данного изобретения.
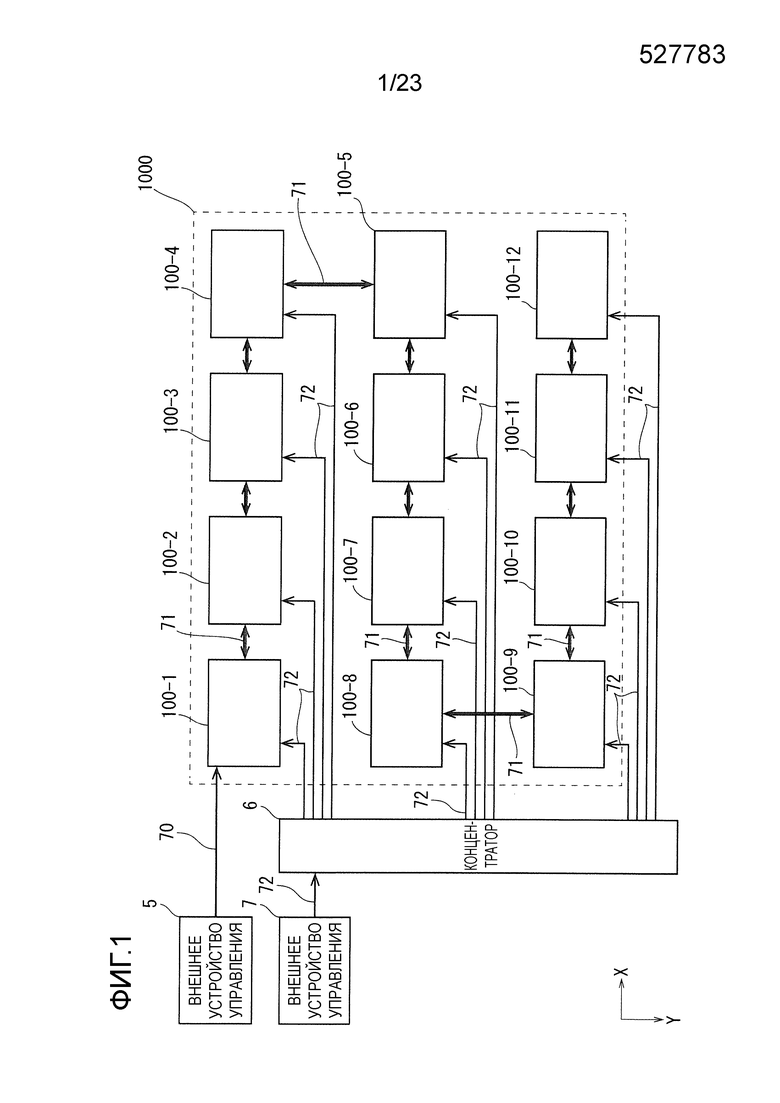
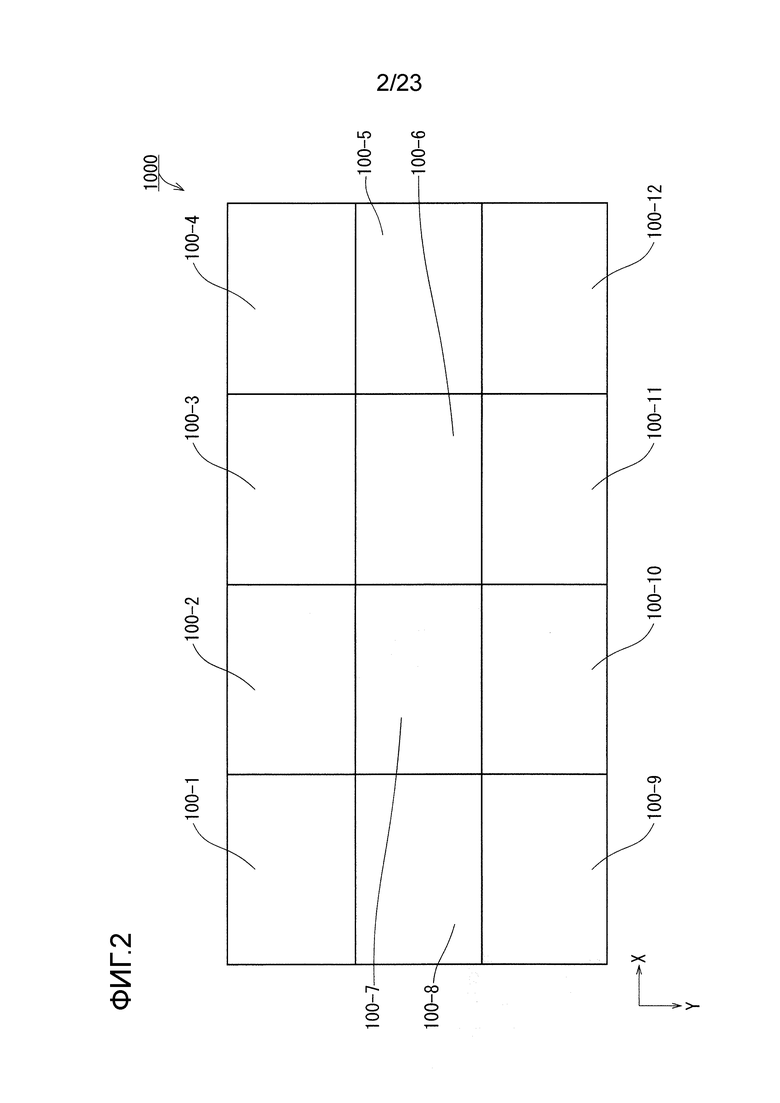
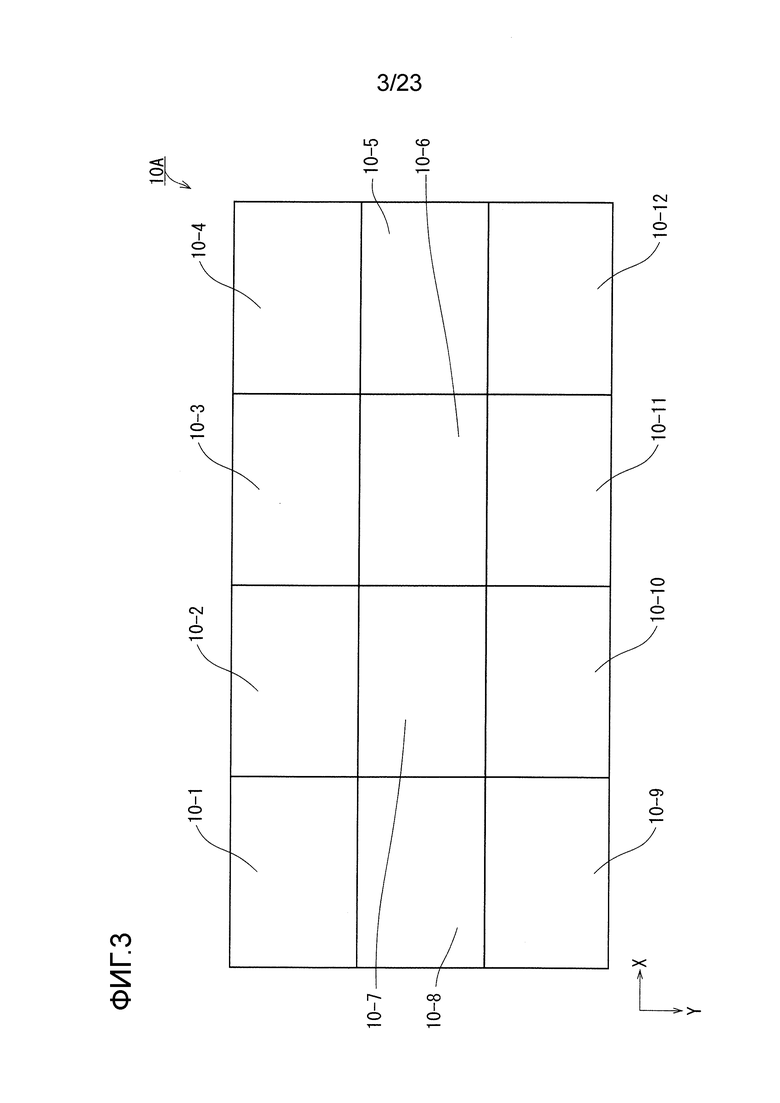
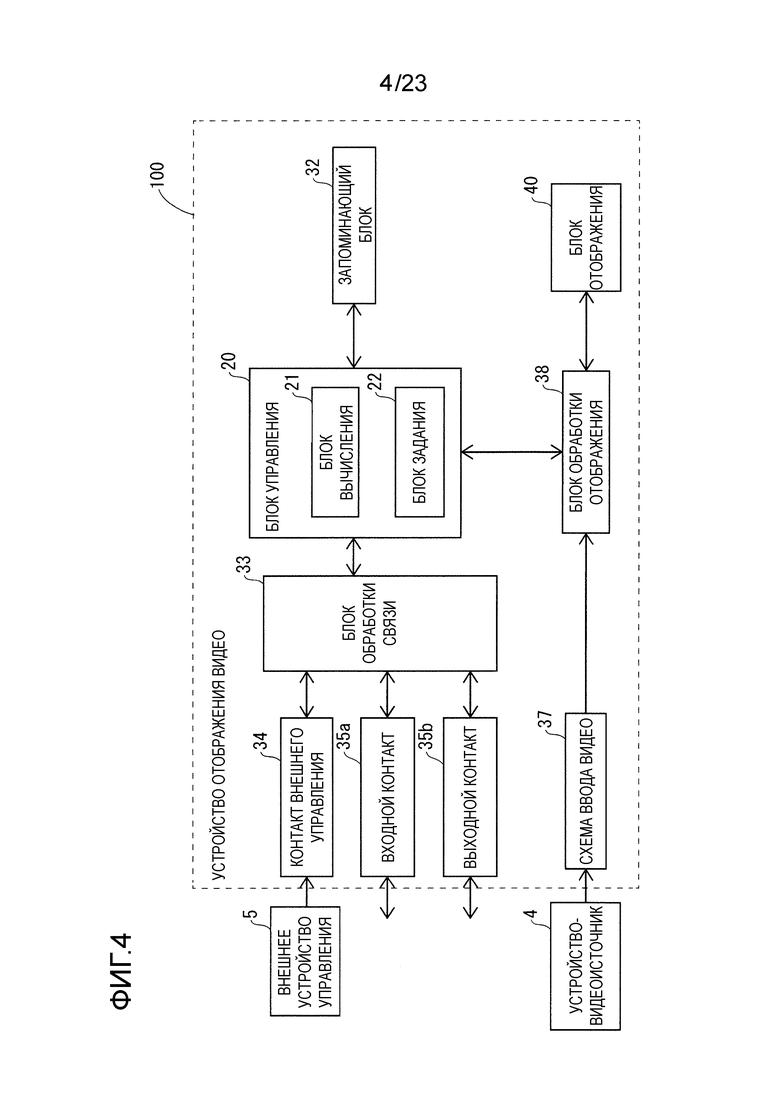
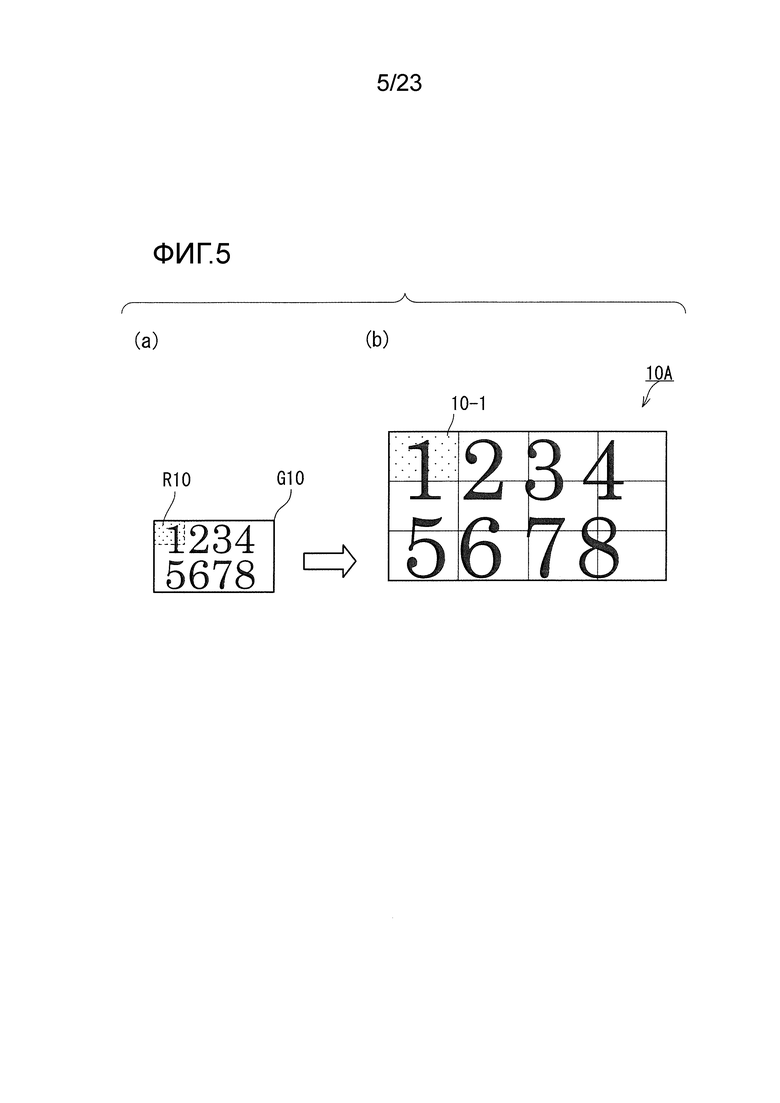
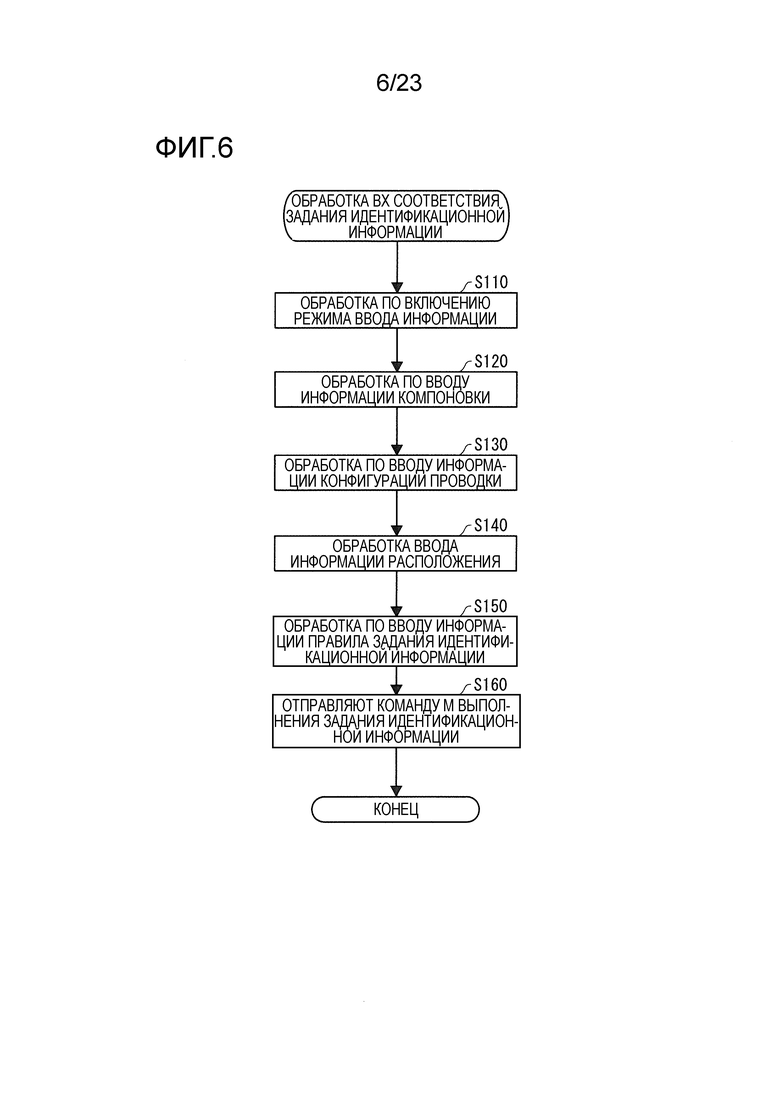
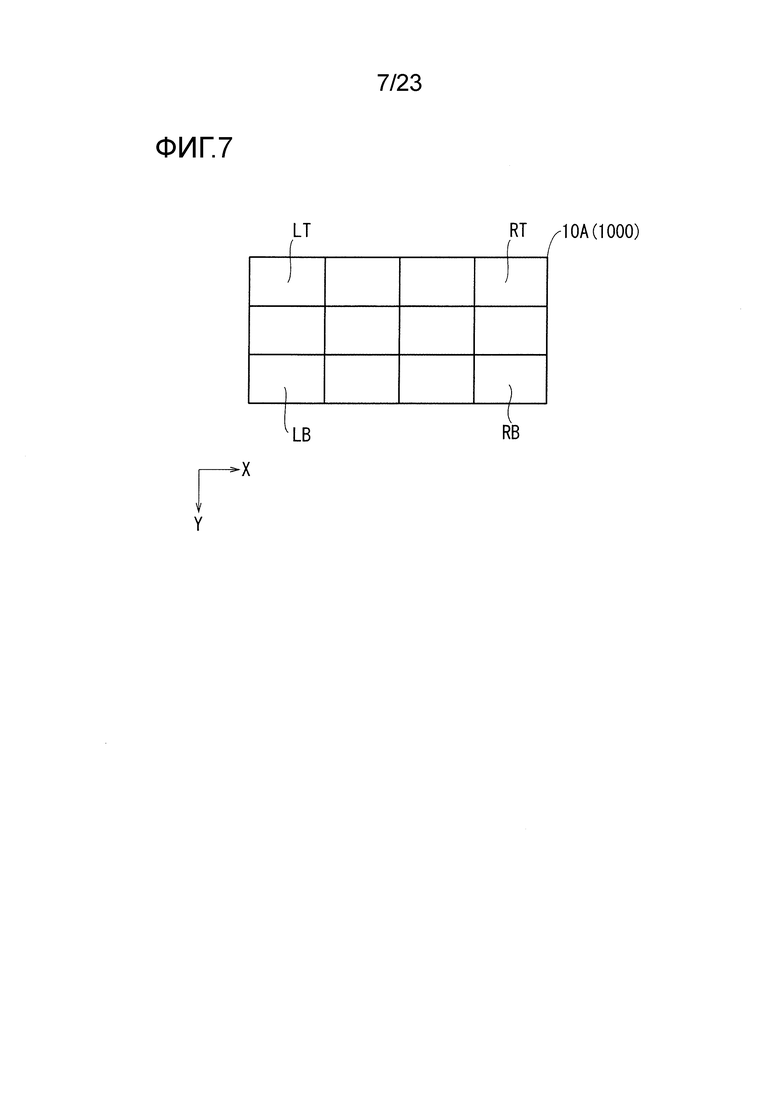
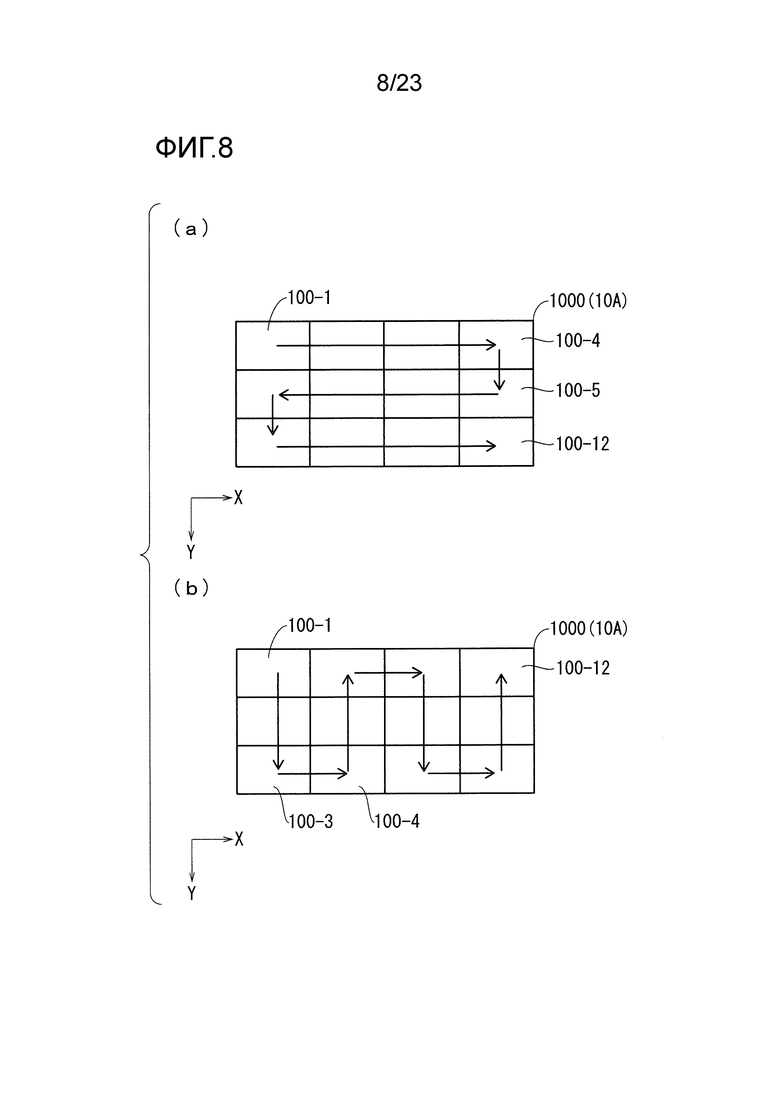
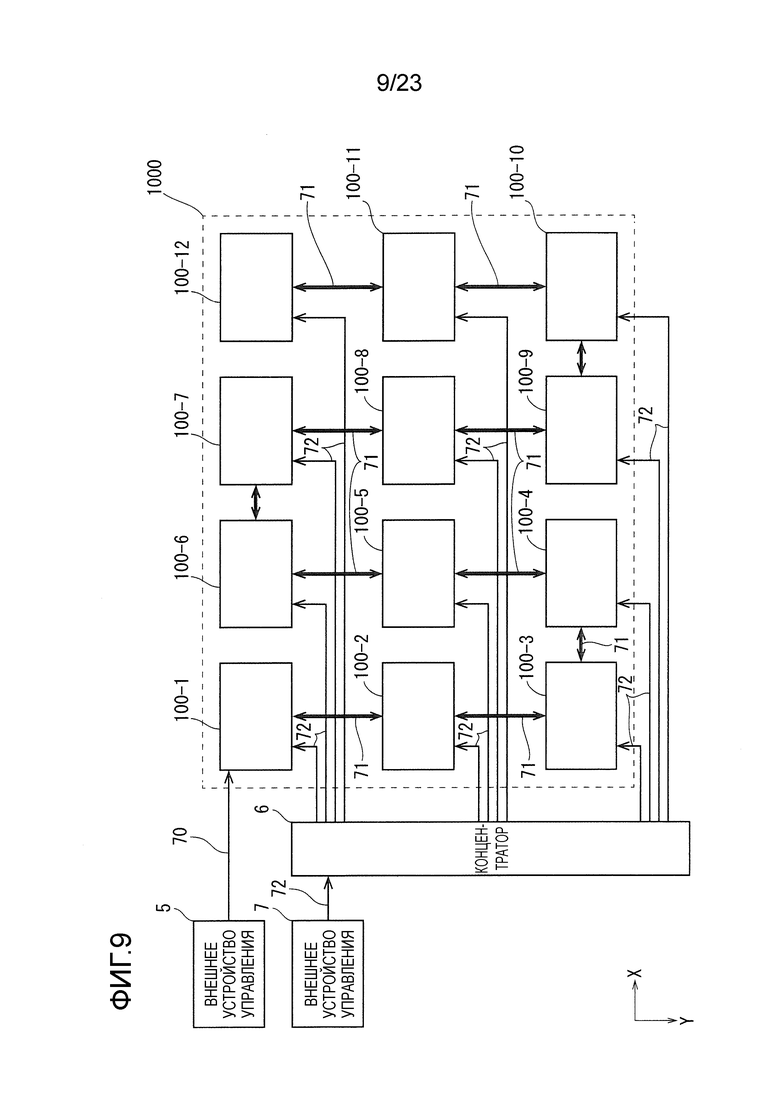
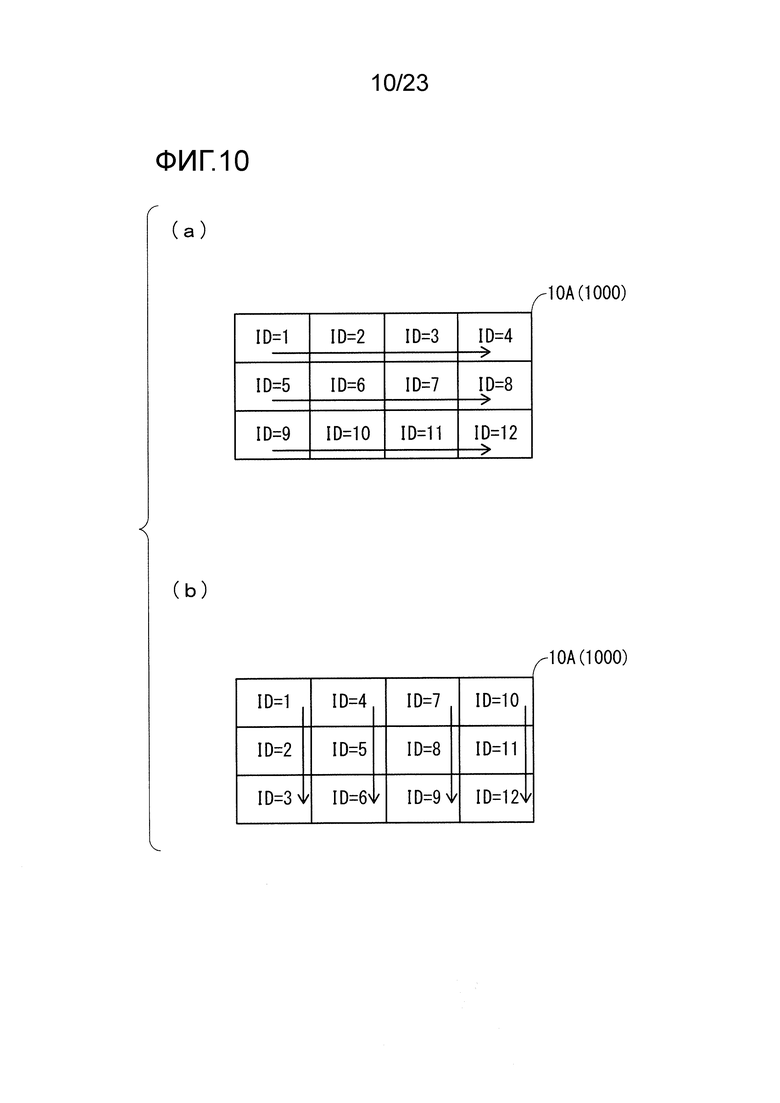
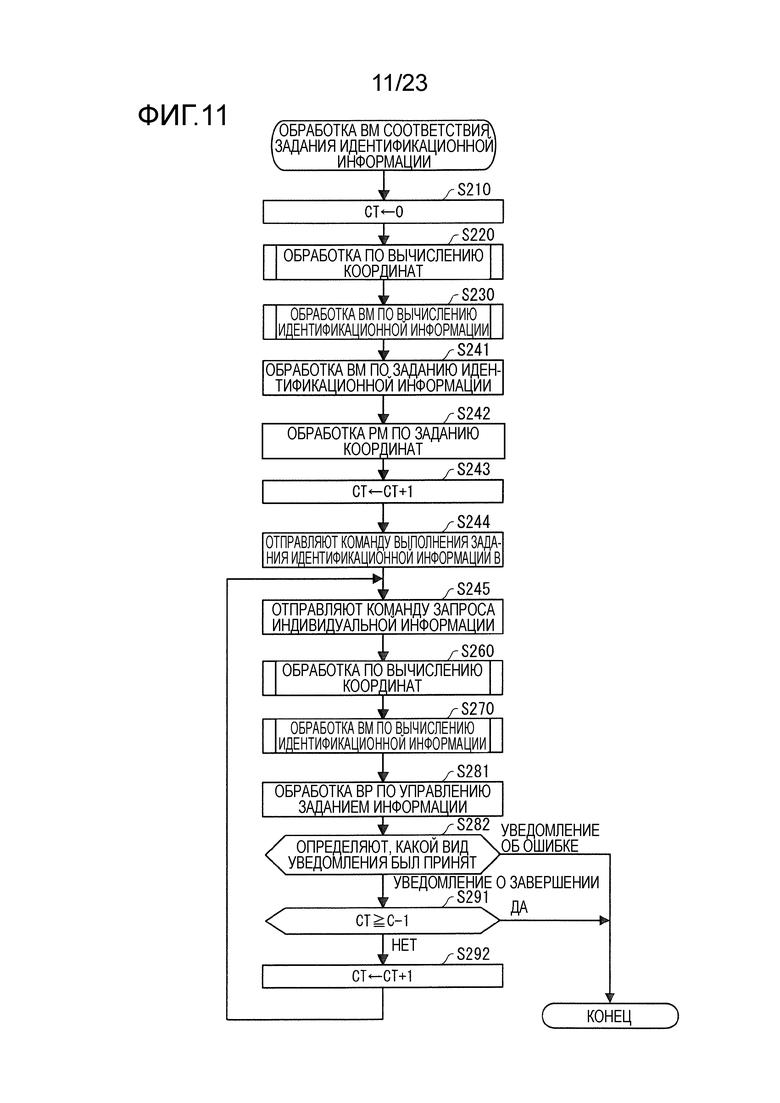
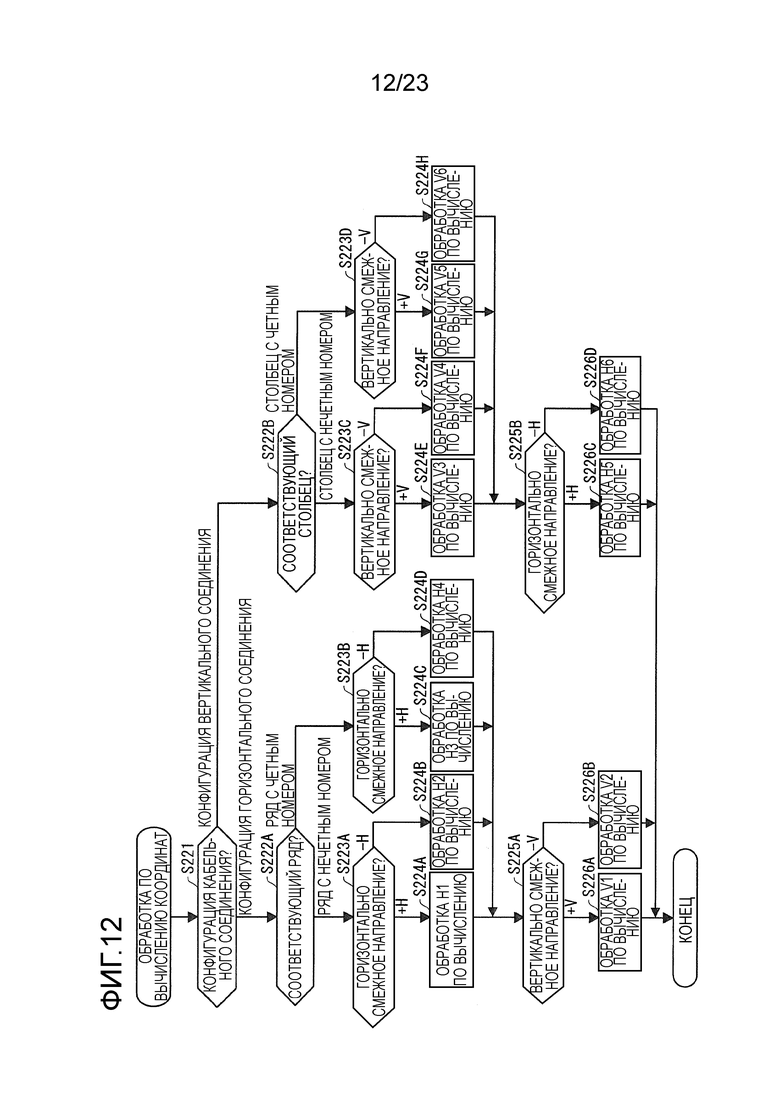
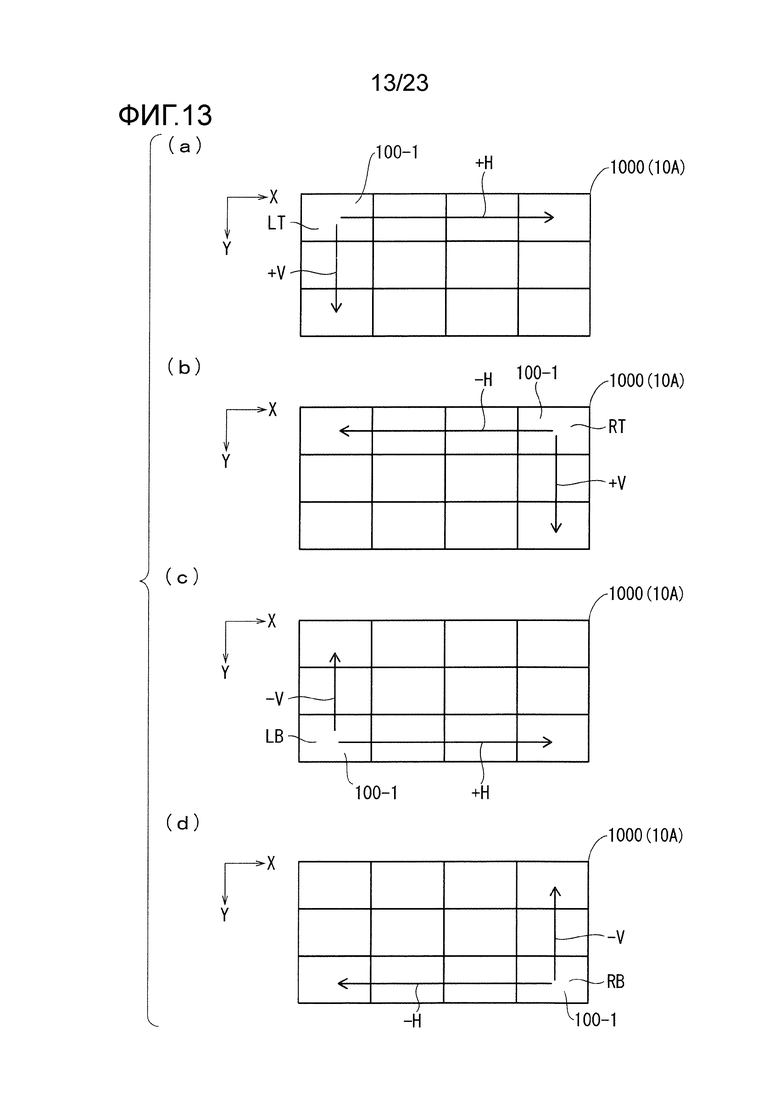
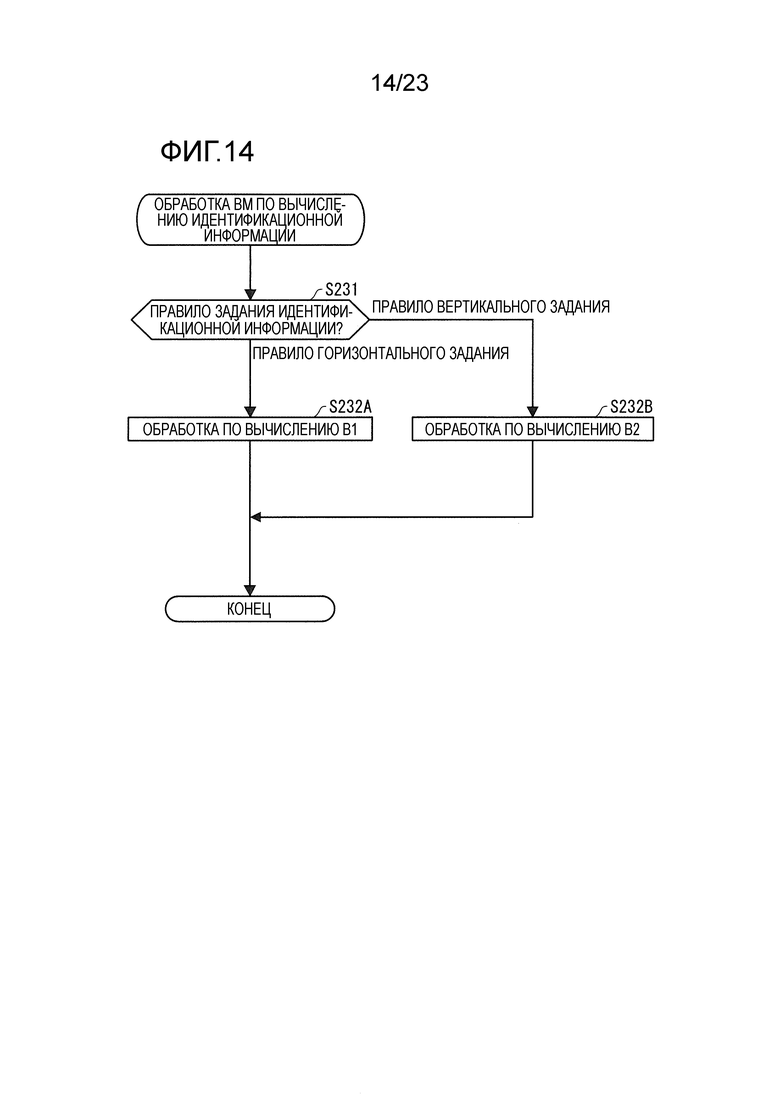
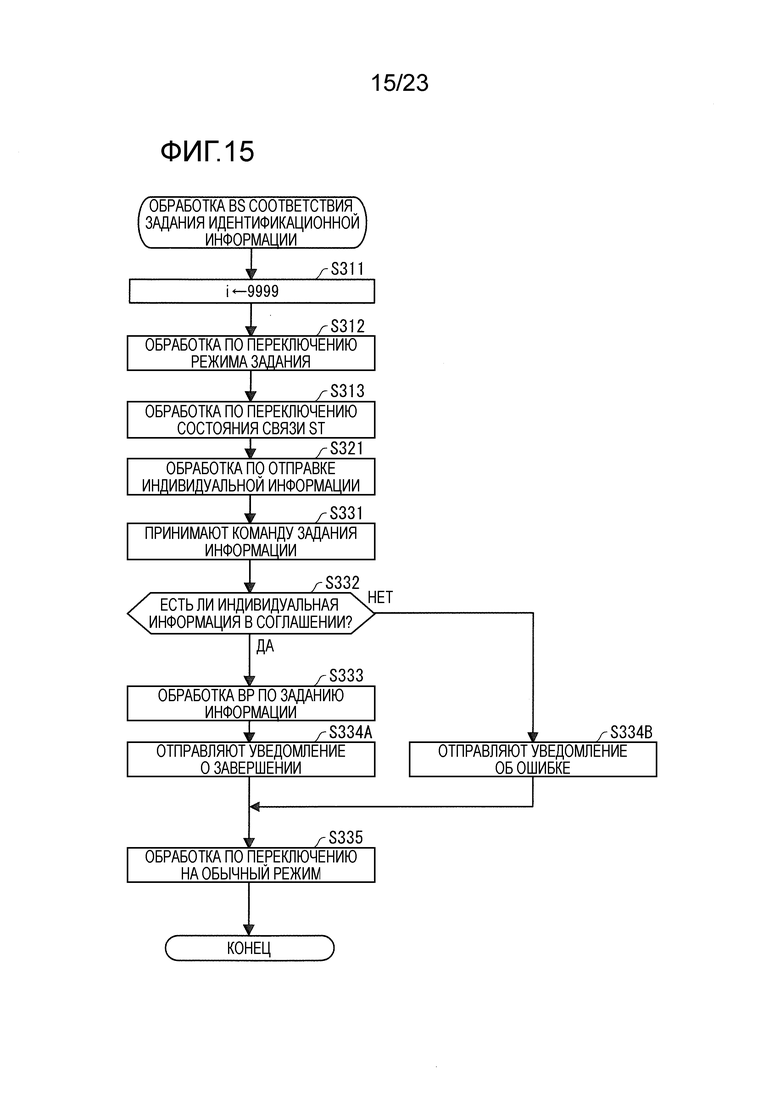
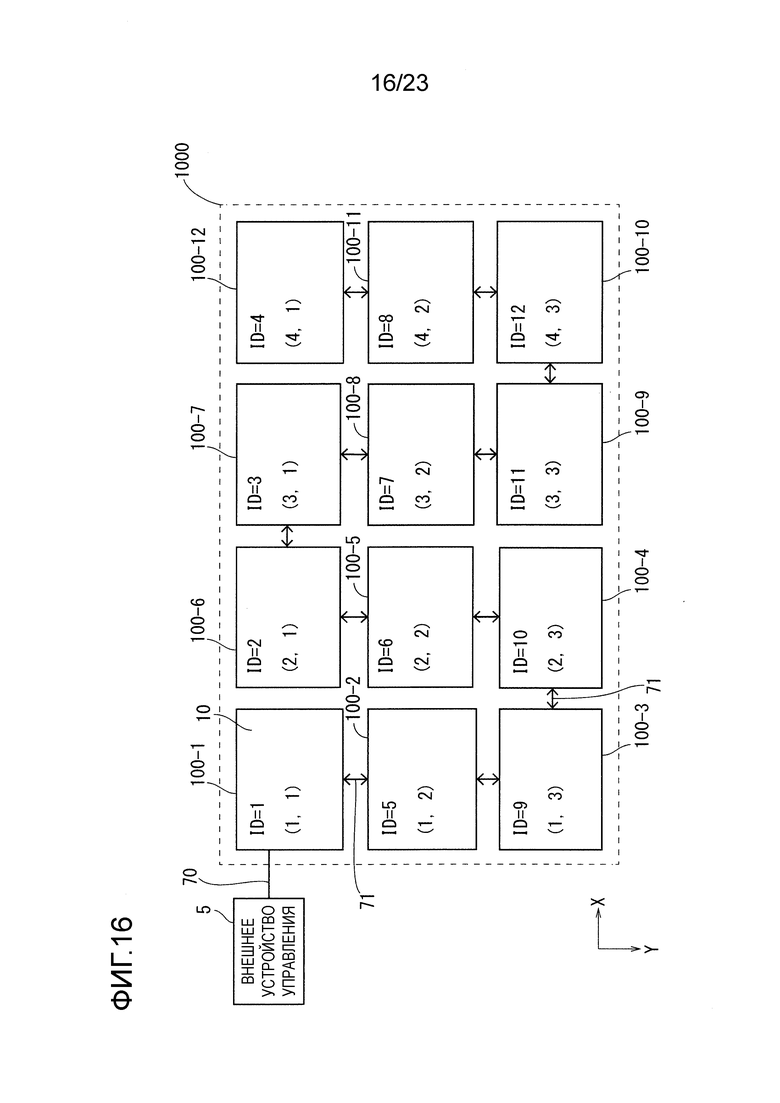
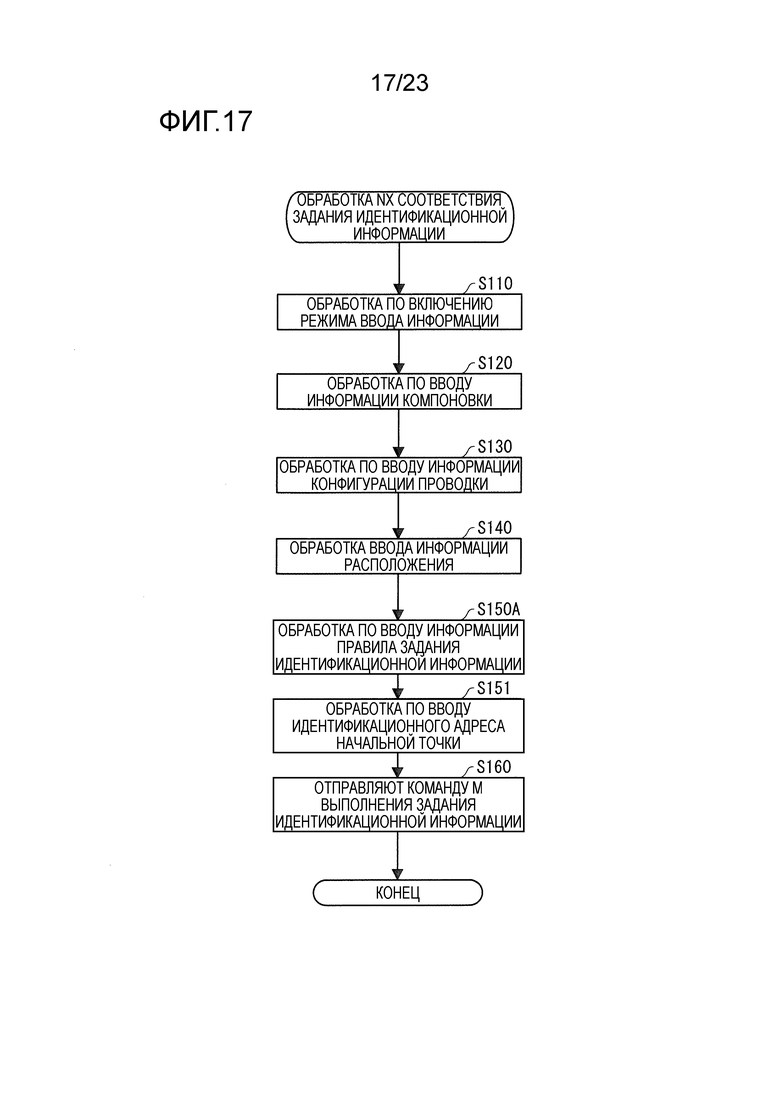
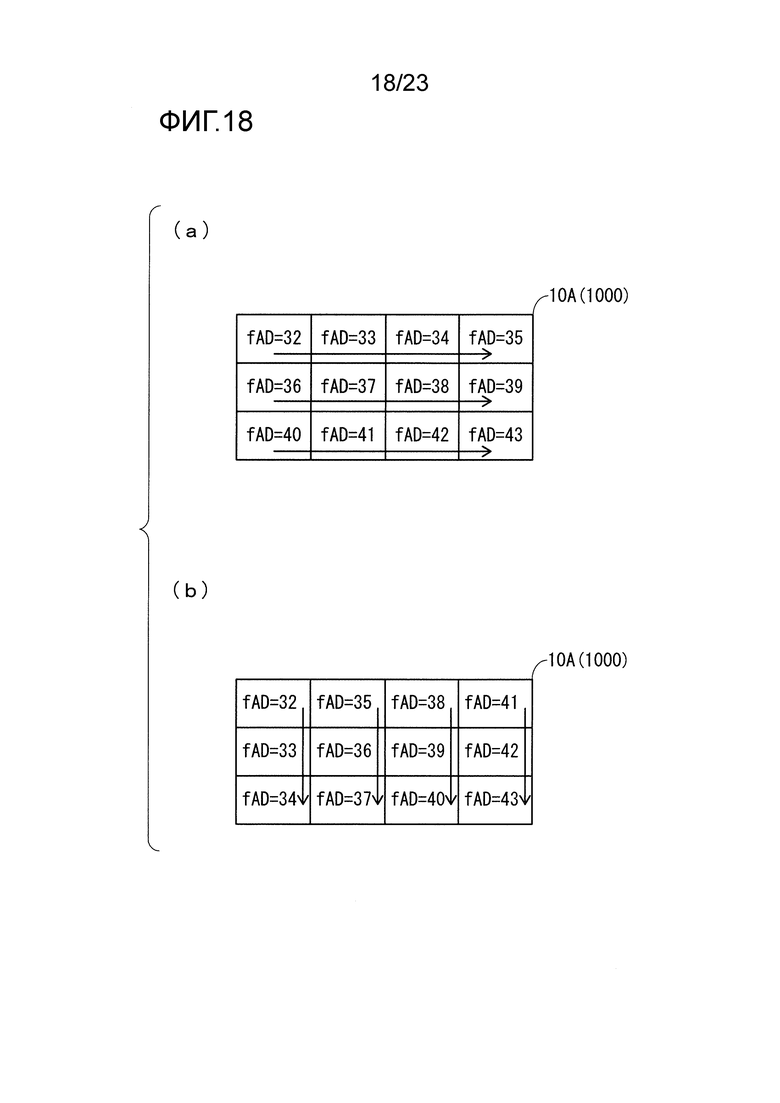
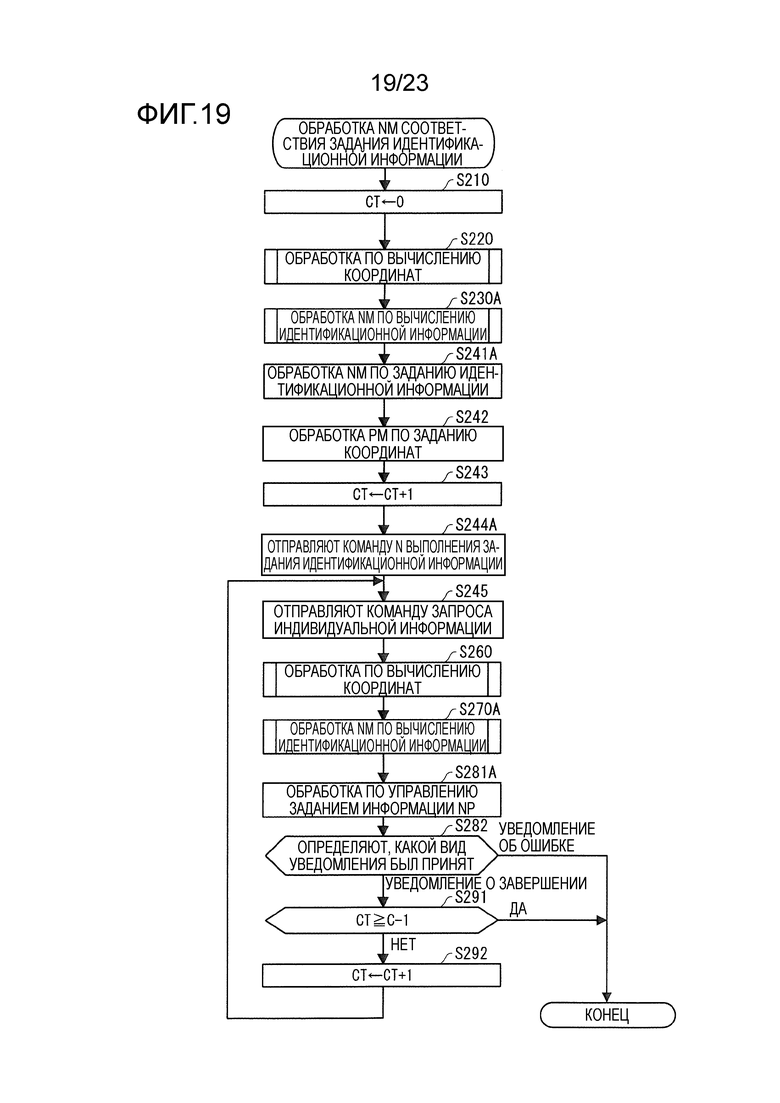
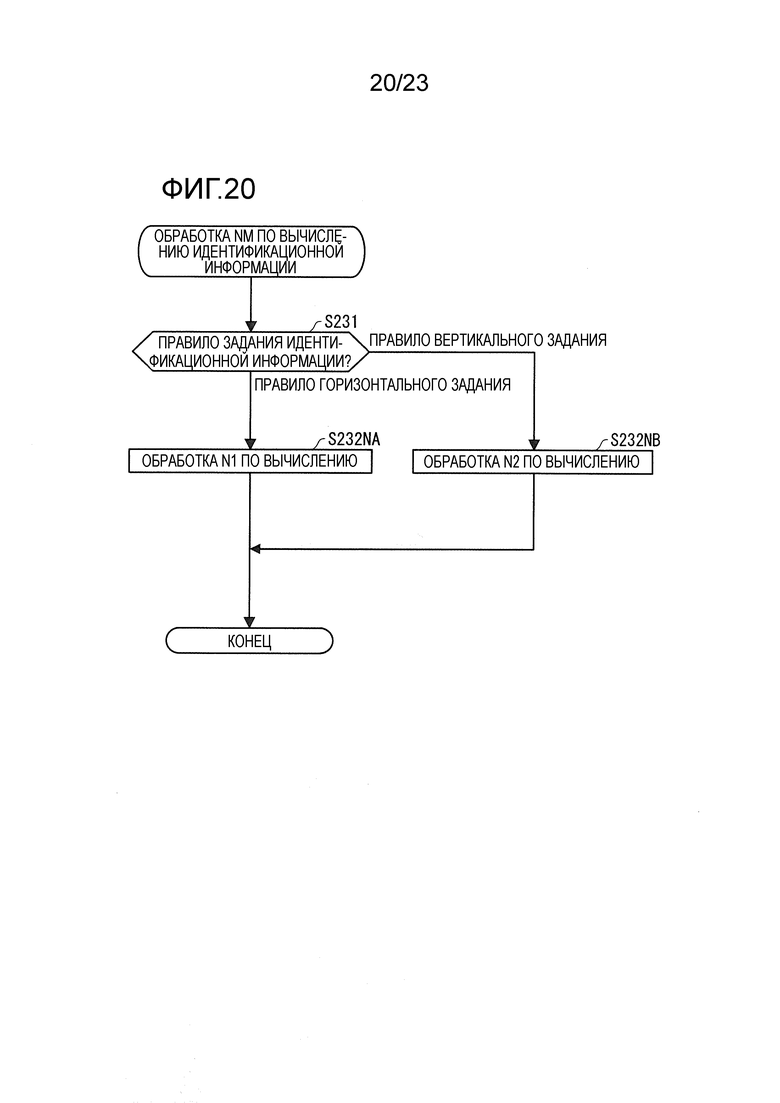
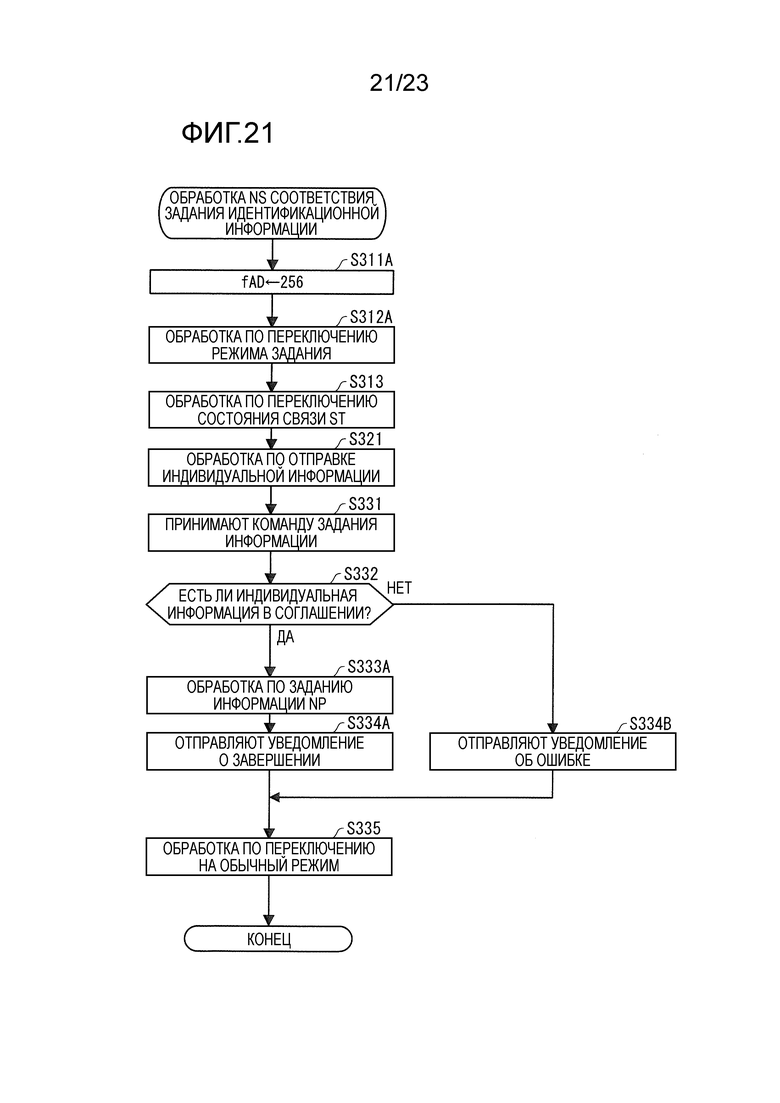
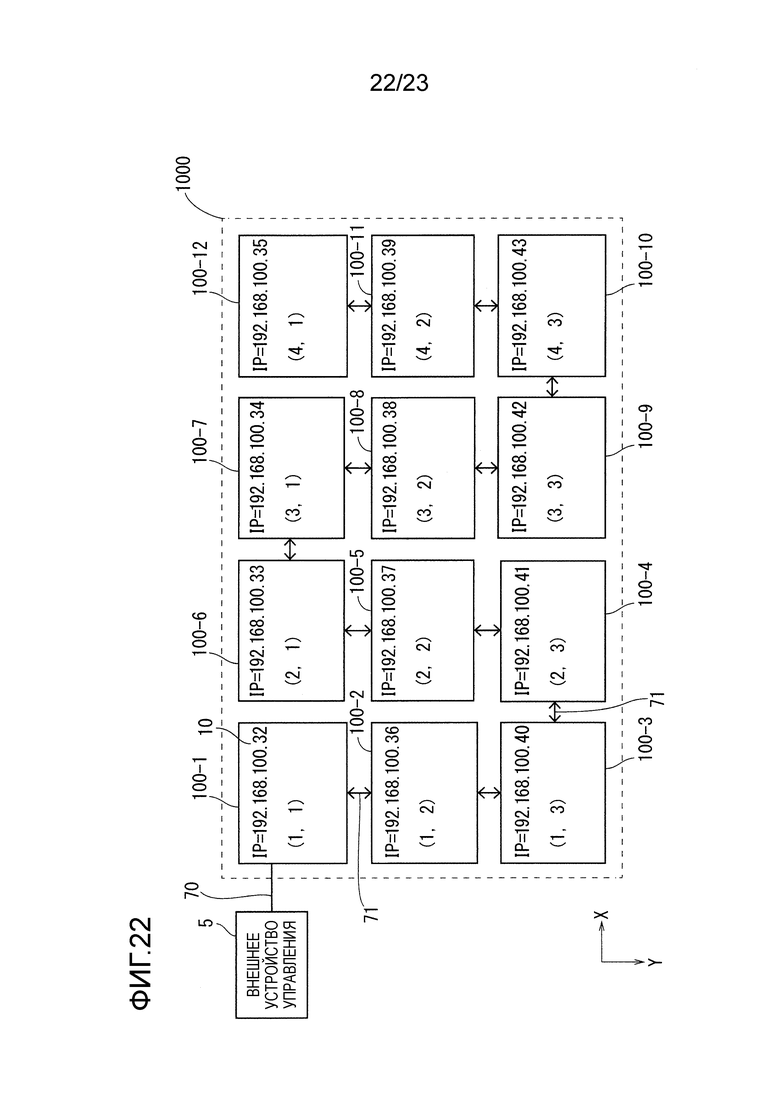
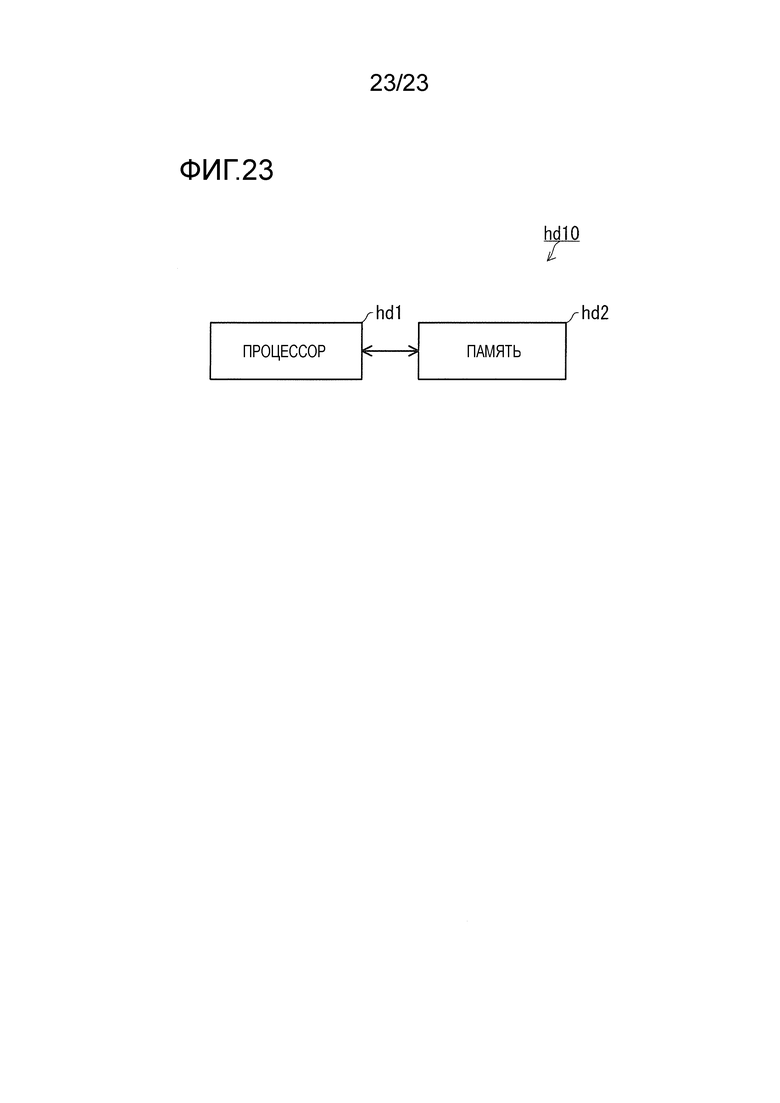
Изобретение относится к многоэкранному устройству отображения. Технический результат – обеспечение возможности многоэкранному устройству отображения задавать идентификационные номера для устройств отображения. Для этого предложено многоэкранное устройство отображения, в котором блок вычисления ведущего устройства, который идет первым в последовательности передачи, вычисляет координаты множества устройств отображения видео на полиэкране на основе информации компоновки и последовательности передачи. Блок вычисления вычисляет идентификационный номер на основе правила задания идентификационной информации. Блок задания выполняет обработку для задания идентификационного номера каждого из устройств отображения видео с вычисленными координатами рассматриваемому устройству отображения видео. 5 з.п. ф-лы, 23 ил.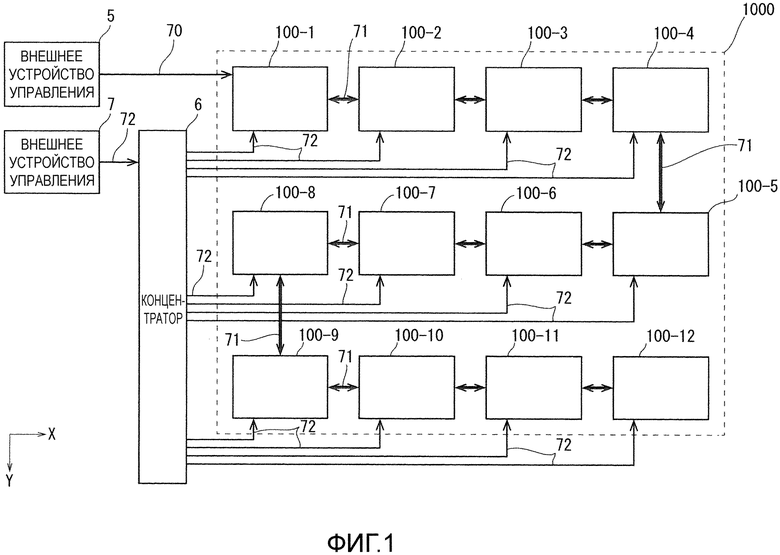
1. Многоэкранное устройство отображения, содержащее множество устройств отображения видео, скомпонованных в матрицу и соединенных с использованием гирляндного соединения посредством кабеля связи, так чтобы экраны упомянутого множества устройств отображения видео образовывали полиэкран, имеющий прямоугольную форму, при этом
для упомянутого множества устройств отображения видео задается последовательность передачи, в которой информация передается между упомянутым множеством устройств отображения видео через упомянутое гирляндное соединение, и
опорное устройство отображения видео, которое идет первым в упомянутой последовательности передачи, из упомянутого множества устройств отображения видео включает в себя:
блок вычисления, выполненный с возможностью:
вычисления координат упомянутого множества устройств отображения видео на упомянутом полиэкране на основе упомянутой последовательности передачи и информации компоновки для определения конфигурации компоновки упомянутого множества устройств отображения видео и
вычисления множества идентификационных номеров для идентифицирования упомянутого множества устройств отображения видео таким образом, чтобы последовательность из множества идентификационных номеров представляла собой (1) последовательность согласно растровому сканированию, в котором последовательность сканирования, начинающегося с опорного расположения, являющегося расположением упомянутого опорного устройства отображения видео в упомянутом полиэкране, изменяется в направлении, горизонтальном упомянутому полиэкрану, или (2) последовательность согласно растровому сканированию, в котором последовательность сканирования, начинающегося с упомянутого опорного расположения, изменяется в направлении, вертикальном упомянутому полиэкрану; и
блок задания, который выполняет обработку для задания упомянутого идентификационного номера каждого из упомянутого множества устройств отображения видео с вычисленными координатами упомянутому рассматриваемому устройству отображения видео.
2. Многоэкранное устройство отображения по п. 1, в котором
упомянутое множество устройств отображения видео соединено с внешним окружением, так чтобы образовать сеть с использованием канала связи, отдельного от другого канала связи, следуя упомянутому гирляндному соединению,
упомянутый блок вычисления вычисляет идентификационный адрес для идентифицирования каждого из упомянутого множества устройств отображения видео в упомянутой сети на основе предварительно определенного правила для задания упомянутого идентификационного адреса каждому из упомянутого множества устройств отображения видео, и
упомянутый блок задания выполняет обработку для задания упомянутого идентификационного адреса каждого из упомянутого множества устройств отображения видео с вычисленными координатами упомянутому рассматриваемому устройству отображения видео.
3. Многоэкранное устройство отображения по п. 1 или 2, в котором упомянутая информация компоновки состоит из числа рядов и числа столбцов матрицы, соответствующей упомянутому множеству устройств отображения видео, скомпонованных в матрицу.
4. Многоэкранное устройство отображения по п. 1 или 2, в котором упомянутый блок задания выполняет обработку для задания координат каждого из упомянутого множества устройств отображения видео с вычисленными координатами упомянутому рассматриваемому устройству отображения видео.
5. Многоэкранное устройство отображения по п. 1 или 2, в котором упомянутое опорное устройство отображения видео размещается в любом одном из четырех углов упомянутого полиэкрана, и упомянутый блок вычисления вычисляет координаты на основе расположения упомянутого опорного устройства отображения видео.
6. Многоэкранное устройство отображения по п. 2, в котором упомянутое правило задается на основе (а) последовательности согласно растровому сканированию, в котором последовательность сканирования, начинающегося с опорного расположения, являющегося расположением упомянутого опорного устройства отображения видео в упомянутом полиэкране, изменяется в направлении, горизонтальном упомянутому полиэкрану, или (b) последовательности согласно растровому сканированию, в котором последовательность сканирования, начинающегося с опорного расположения, изменяется в направлении, вертикальном упомянутому полиэкрану.
| WO 2014064824 A1, 01.05.2014 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| CN 103258521 A, 21.08.2013 | |||
| МНОГОЭКРАННОЕ ДИСПЛЕЙНОЕ УСТРОЙСТВО | 2011 |
|
RU2473943C2 |

