Изобретение относится к транспортным средствам для межпланетного сообщения и может быть использовано в конструкциях космических аппаратов.
Известны космические аппараты (КА) и их группы (космические станции - КС), работающие на околоземных и более высоких орбитах. Запуск таких КА осуществляется с использованием мощных наземных комплексов (космодромов) и многоступенчатых ракет-носителей разового применения. При этом возвращается на Землю не сам КА, а лишь его модуль - спускаемая капсула. Для спуска применяется баллистическая траектория, что сопряжено с большими перегрузками, испытываемыми членами экипажа, и тепловым перегревом. Необходимость использования баллистической траектории объясняется отсутствием на КА ресурса для торможения при спуске из-за ограничения веса полезной нагрузки при старте.
Известна ракета для межпланетных полетов, содержащая центральный модуль первой ступени с боковыми модулями первой ступени и центральный модуль второй ступени с боковыми модулями второй ступени, боковые модули соединены с центральными соединительными штангами, имеющими возможность расстыковки, при этом все модули имеют корпус, баки окислителя и горючего внутри корпусов и по меньшей мере по одному жидкостному ракетному двигателю в каждом модуле, и системы перелива одного из компонентов топлива из боковых модулей в центральный. Ракета включает также блоки сопел крена, содержащие по два оппозитно установленных сопла крена. Блоки сопел крена установлены на внешней удаленной от оси ракеты-носителя поверхности корпусов боковых модулей всех ступеней (патент РФ №2464207, МПК B64G 1/40, В64С 29/04, публикация 2012 г.).
Известен космический аппарат, содержащий экспериментальные модули, охватывающий модули кольцеобразный ферменный каркас с элементами крепления модулей с его внутренней грани, соединенные с наружной гранью каркаса солнечные батареи и радиаторы системы обеспечения теплового режима, а также двигатели системы ориентации. Аппарат содержит модуль, размещенный в центре кольца каркаса, при этом по меньшей мере некоторые экспериментальные модули соединены с указанным модулем одними своими торцами при помощи стыковочных узлов, а другими торцами с внутренней гранью каркаса, солнечные батареи и радиаторы системы обеспечения теплового режима размещены в плоскости кольца каркаса, а двигатели системы ориентации установлены на боковых поверхностях экспериментальных модулей вблизи их торцов, соединенных с каркасом (патент РФ №2072951, МПК B64G 1/10, публикация 1997 г.).
Известные устройства не обеспечивают возможность вывода и спуска ракет с космических орбит, т.е создания «космического лифта» для запуска обитаемых спускаемых орбитальных станций многоразового действия.
В качестве ближайшего аналога принято транспортное средство (ТС) повышенной грузоподъемности по заявке №2015107430/11 от 04.03.2015 г.
Указанное транспортное средство повышенной грузоподъемности для воздушной среды большого разряжения включает транспортирующий модуль и соединенный с ним посредством узла соединения транспортируемый модуль, при этом транспортное средство использует в качестве движителя архимедову силу и двигатели с различного типа движителями, например пропеллерными. Транспортирующий модуль транспортного средства выполнен в виде мобильной стартовой площадки, причем транспортируемым модулем транспортного средства является запускаемый объект, содержащий основание, выполненное в виде эллипса с расположенными по его периметру несколькими группами оболочек постоянного и переменного объема, оснащенными системами управления плавучестью, включающими запасы жидкого гелия и оборудование для его реверсивного перекачивания, двигатели с электроприводами, снабженные системами подзарядки их аккумуляторных батарей от возобновляемых источников энергии на проточных электрогенераторах, системы управления движением и внешнего контроля и устройства для перемещения транспортного средства по земле. Транспортирующий модуль транспортного средства содержит набор тяговых электродвигателей движения в горизонтальной плоскости по одному или нескольким фиксированным курсам и два дополнительных двигателя для возможности корректировки фиксированного курса, а также тяговые двигатели движения в вертикальной плоскости для возможности фиксации положения транспортирующего модуля по высоте. Транспортирующий модуль транспортного средства содержит приемную часть, выполненную в виде ложемента, а транспортируемый модуль содержит ответную часть узла соединения транспортирующего модуля с транспортируемым.
Однако это универсальное ТС не предназначено для вывода его самого в открытый космос, полетов и маневрирования в космическом пространстве.
Задачей предлагаемого изобретения является создание такой конфигурации космического аппарата, при которой он будет способен самостоятельно выполнять «мягкий старт» с выходом на заданную орбиту, маневрировать в космическом пространстве (в том числе при выполнении функции межорбитального буксира) и плавно возвращаться на Землю. Последнее особенно важно для снижения перегрузок, испытываемых экипажем, и уменьшения перегрева поверхностей конструкции самого КА. Логическим завершением конфигурации такого КА может явиться модифицируемое ТС межпланетного сообщения. А вариантов модификации должно быть по крайней мере два: орбитальная космическая станция (КС) многоразового применения и «космический лифт» (КЛ) для запуска и спуска ракет с космических орбит.
Перечень сфер применения подобных ТС в любых вариантах ограничивается только полетом фантазии: от традиционного исследования околоземного и околосолнечного пространства в пилотируемом или беспилотном варианте (например, для выполнения программы исследований с помощью нескольких легких КА-челноков), переноса КА с одной орбиты на другую и до создания поселений колонистов на планетах Солнечной и, возможно, других систем. Например, комбинация «посещаемая космическая станция» + «мягкий старт» может стать весьма успешным коммерческим проектом. А старт из полярной области Земли позволит избежать неприятностей с прохождением пояса заряженных частиц на высотах более 600 км.
Транспортное средство (ТС) межпланетного сообщения характеризуется тем, что оно включает каркас с размещенными на нем комплексом модулей управляемой плавучести, электродвигатели с винтовыми движителями, жидкостные реактивные двигатели (ЖРД) с неизменяемыми векторами реактивной тяги, системами энергообеспечения, ориентации и управления, а также убирающимися стойками шасси, при этом на каркасе установлены ЖРД с изменяемыми векторами реактивной тяги, емкости запасов горючего и окислителя для них, обитаемый отсек с системами жизнеобеспечения и портами причаливания космических аппаратов, емкости запасов горючего системы энергообеспечения, а также средства тепловой защиты обитаемого отсека и элементов оборудования ТС, причем включение и совместная работа модулей, систем и узлов осуществляется как в автоматическом режиме, так и по командам пилота или дистанционно из центра управления вне ТС.
Модули управляемой плавучести содержат купольные конструкции, в которых размещены емкости запасов горючего и окислителя для ЖРД, причем емкости в каждом модуле предназначены только для одного из компонентов.
ЖРД с изменяемыми векторами тяги содержат стационарные цапфы механизмов поворота самих двигателей, через которые осуществляется подача топлива и окислителя в камеры сгорания ЖРД.
Купольные конструкции модулей управляемой плавучести включают секции оболочек, снабженных многосекторными теплоизоляционными крышками и устройствами удержания секторов крышек в закрытом и полностью открытом положениях.
Система энергообеспечения включает подсистемы выработки электроэнергии на различных физических принципах, работающие поочередно или одновременно в различных сочетаниях.
В другом варианте исполнения транспортное средство (ТС) межпланетного сообщения характеризуется тем, что оно включает каркас с размещенными на нем комплексом модулей управляемой плавучести, электродвигатели с винтовыми движителями, реактивные двигатели (ЖРД) с неизменяемыми векторами реактивной тяги, системами энергообеспечения, ориентации и управления, а также убирающимися стойками шасси, при этом на каркасе установлен ложемент для размещения и закрепления ракеты с полезным грузом, запускаемой или спускаемой с космической орбиты, а также установлены ЖРД с изменяемыми векторами реактивной тяги, емкости запасов горючего и окислителя для них, порты причаливания космических аппаратов, емкости запасов горючего системы энергообеспечения, средства тепловой защиты и элементов оборудования ТС, причем включение и совместная работа модулей, систем и узлов осуществляется как в автоматическом режиме, так и по командам пилота или дистанционно из центра управления вне ТС.
Сущность изобретения выражается в следующей совокупности решений для достижения технического результата, поставленного в задачах разработки устройства - предполагаемого изобретения: суммарная емкость как основных, так и резервных оболочек модулей управляемой плавучести достаточна для обеспечения подъема снаряженного ТС в верхние слои атмосферы; суммарная мощность реактивных двигателей достаточна для вывода ТС на расчетную орбиту, выполнения маневрирования в космическом пространстве и торможения при спуске ТС с орбиты на Землю; суммарные емкости горючего и окислителя достаточны, чтобы их запасы гарантированно обеспечили функционирование всех реактивных двигателей на всех этапах программы полета; суммарная емкость запасов горючего для систем энерго- и жизнеобеспечения достаточна для обслуживания экипажа и программы его полета в течение всего времени от старта с Земли до приземления в наперед заданной точке, в том числе при движении в атмосфере и резервном использовании винтокрылых машин в критических ситуациях.
Сущность предлагаемых решений поясняется следующими рисунками.
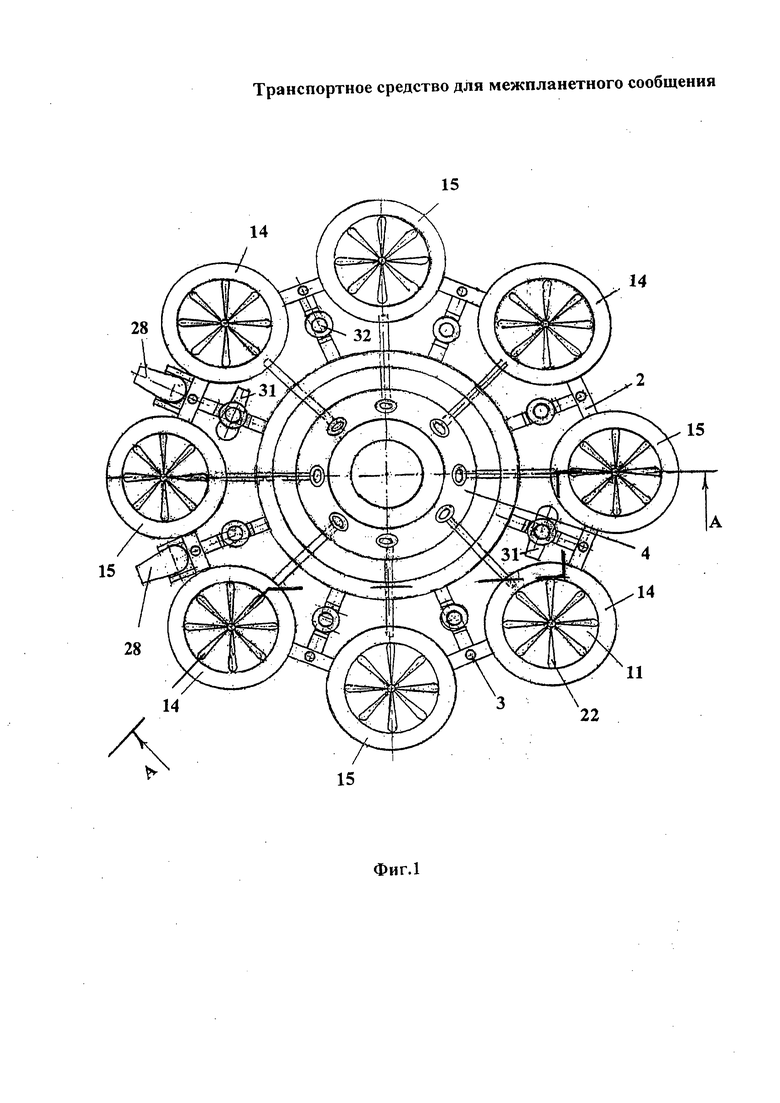
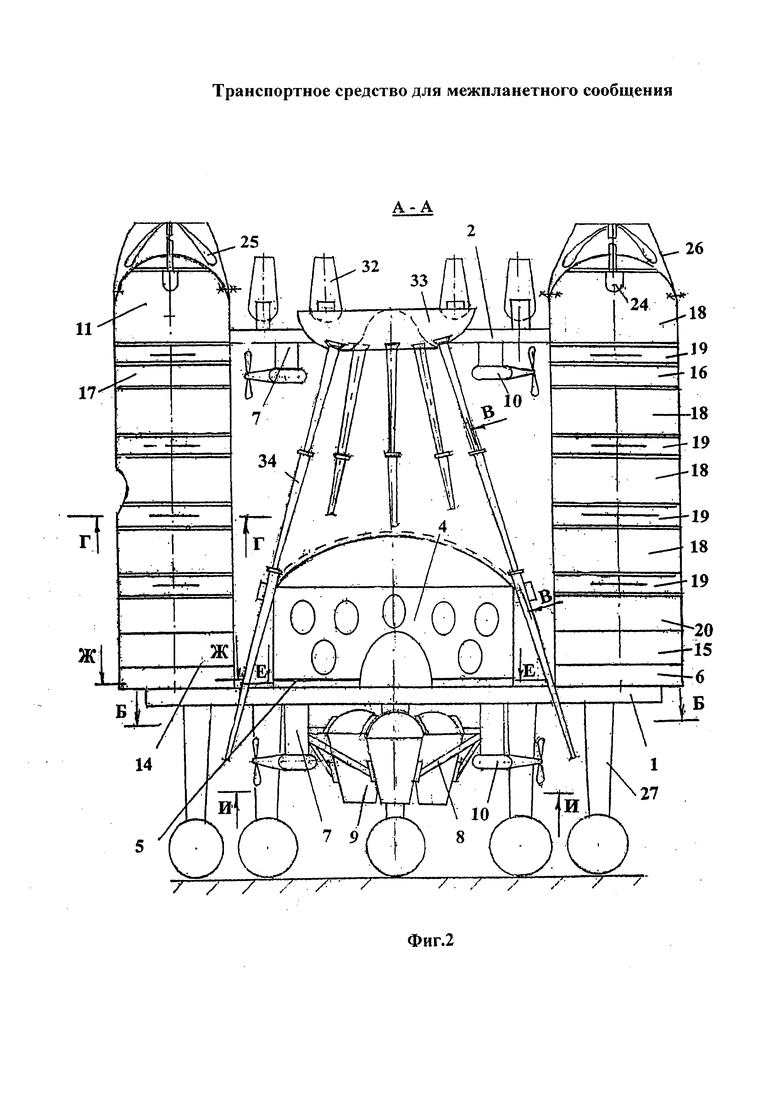
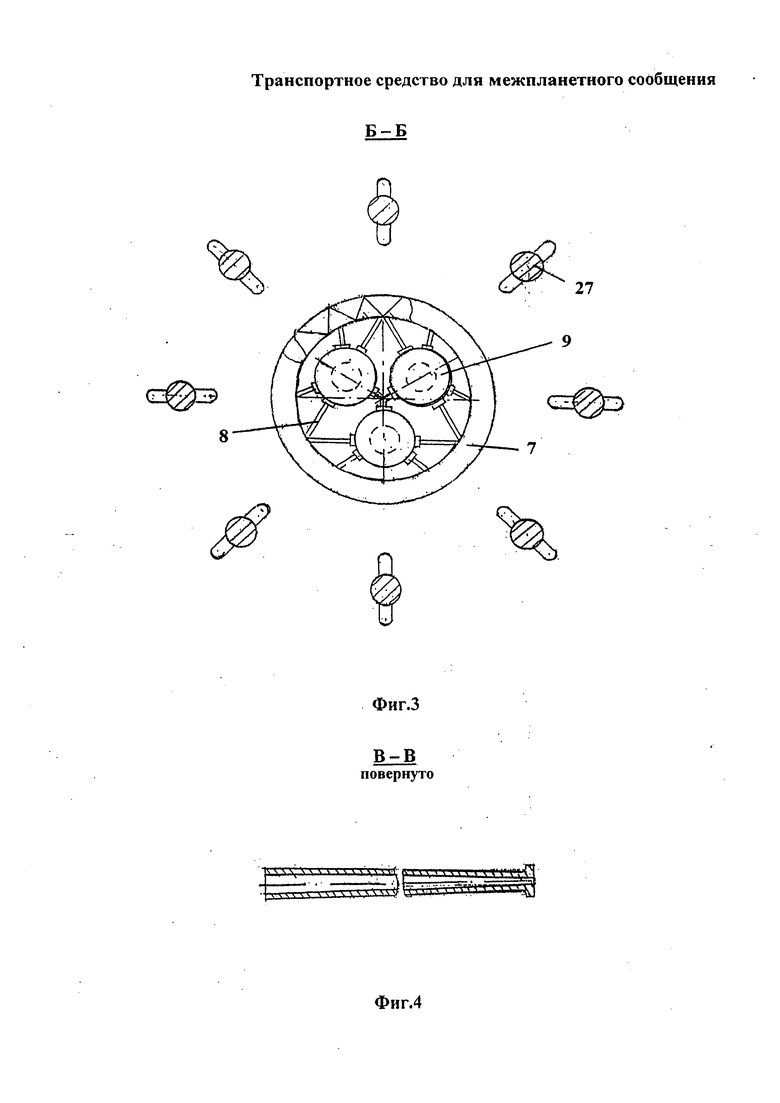
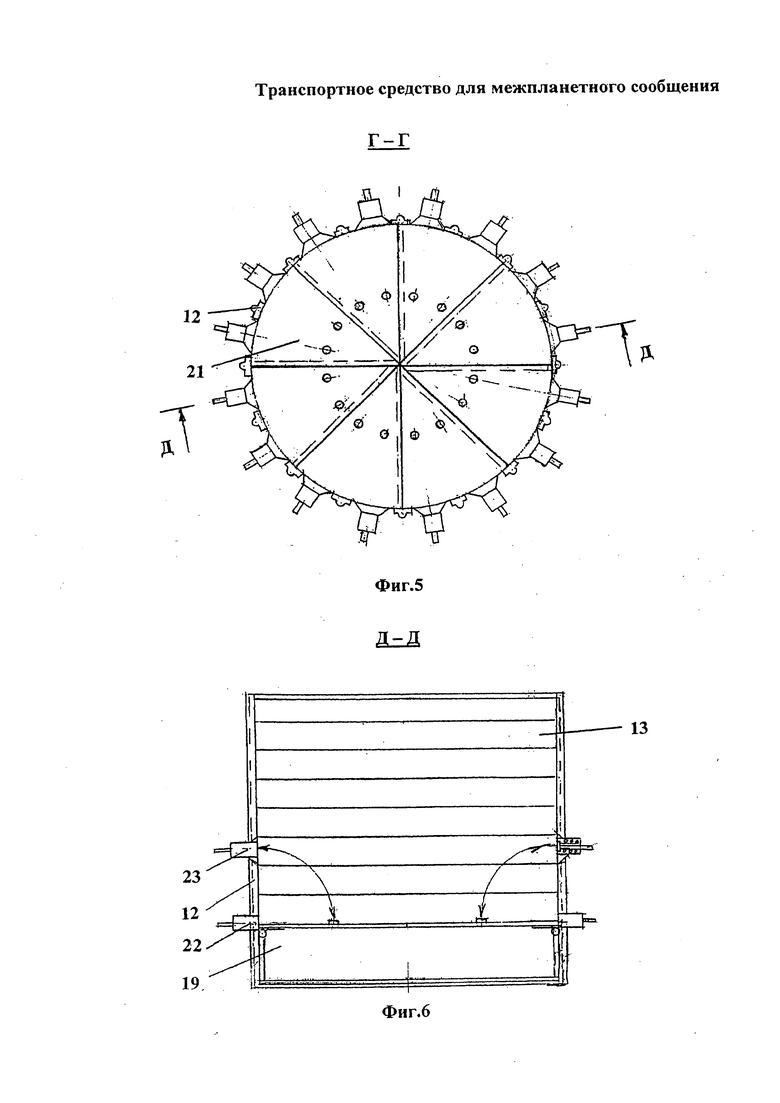
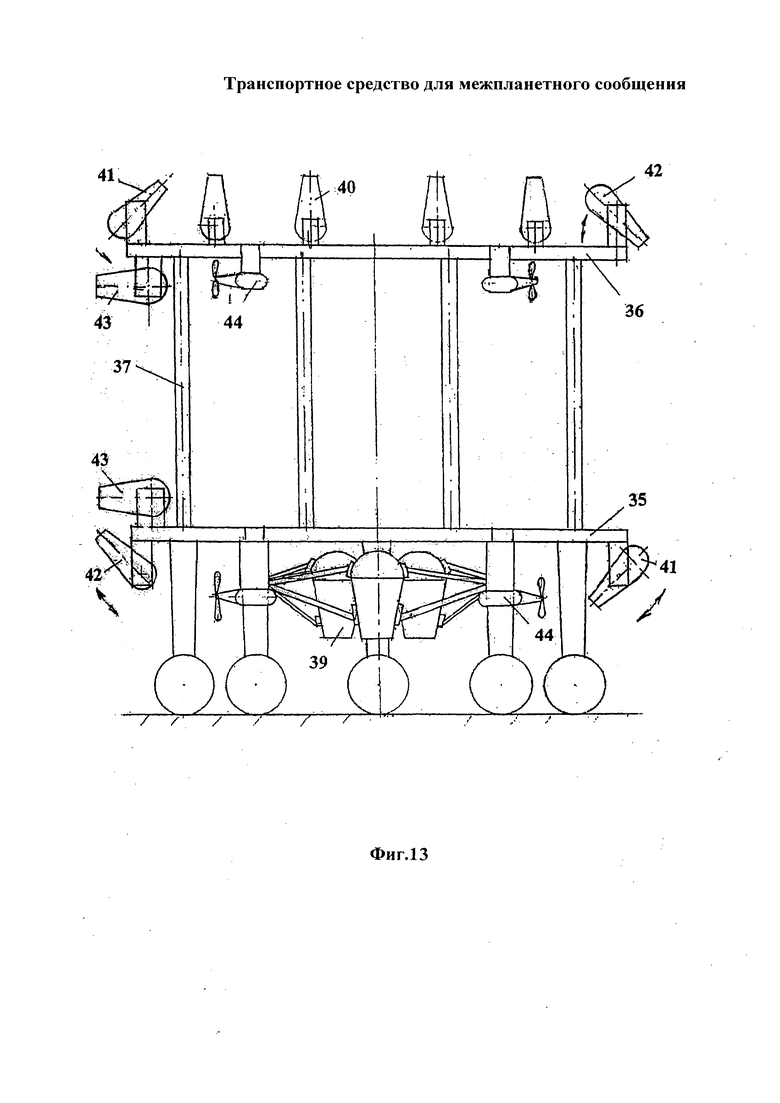
На фиг. 1 изображен космический аппарат для межпланетных перелетов; на фиг. 2 - разрез АА на фиг. 1; на фиг. 3 - сечение ББ на фиг. 2; на фиг. 4 - сечение ВВ на фиг. 2; на фиг. 5 - сечение ГГ на фиг. 2; на фиг. 6 - сечение ДД на фиг. 5; на фиг. 7 - сечение ЕЕ на фиг. 2; на фиг. 8 - сечение ЖЖ на фиг. 2; на фиг. 9 - сечение ИИ на фиг. 2; на фиг. 10 - изображена схема расположения ЖРД на космическом аппарате; на фиг. 11 изображен космический лифт; на фиг. 12 разрез КК на фиг. 11; на фиг. 13 - схема размещения ЖРД на космическом лифте.
Предложенное транспортное средство в варианте орбитальной космической станции (КС) многоразового применения содержит жесткий каркас из нижнего 1 (фиг. 2) и верхнего 2 (фиг. 1, 2) оснований, соединенных стяжками 3 (фиг. 1, 10) в виде труб. Основания 1 и 2 представляют собой конструкции из ферм в виде наружного и внутреннего замкнутых контуров, соединенных между собой радиальными фермами. Все элементы каркаса выполнены из легкого сплава. Для увеличения жесткости каркаса допускается применять ванты с предварительным натяжением.
На внутреннем контуре нижнего основания 1 (фиг. 2) жестко закреплен комплекс жилых конструкций 4 (фиг. 1, 2). Под комплексом 4 расположен комплекс 5 (фиг. 2) для технических систем и систем жизнеобеспечения, дизель-генераторов зарядки аккумуляторных батарей с запасом горючего для них, бортовой аппаратуры (включая системы технического контроля состояния узлов и систем самой КС), других технических нужд. На внешнем контуре нижнего основания 1 (фиг. 2) жестко закреплены технические отсеки 6.
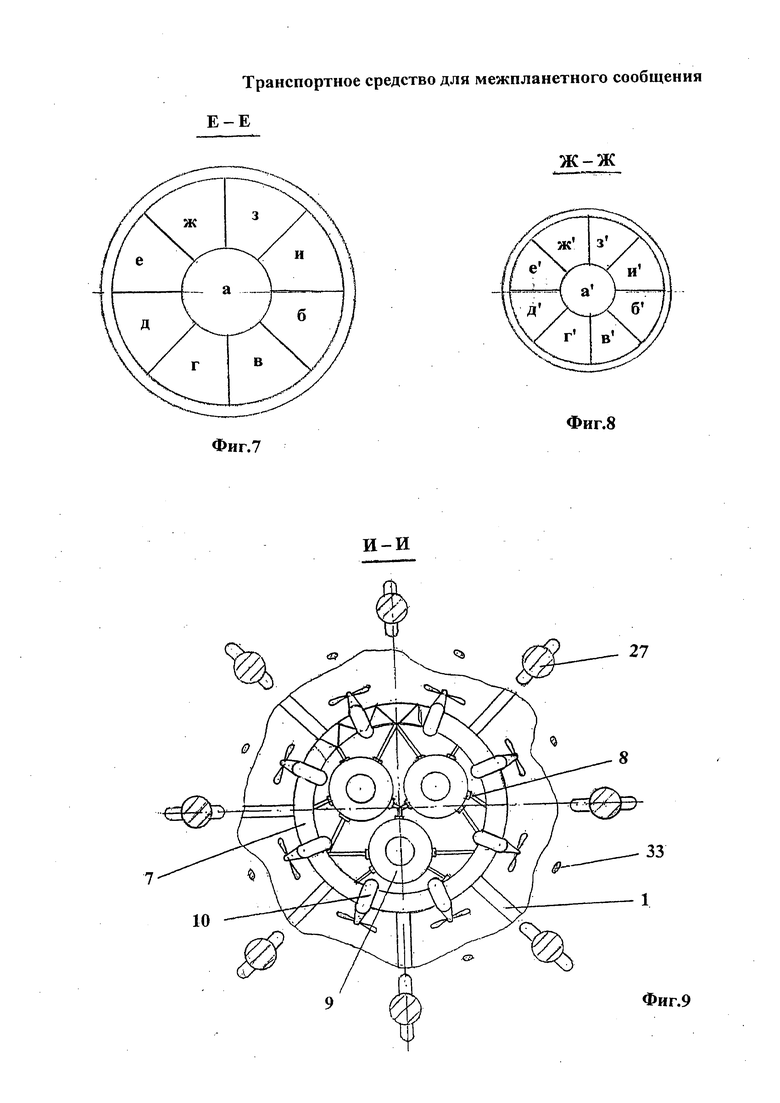
Расположение помещений в комплексе 5 и в отсеках 6 приведено на фиг. 7 и 8, где показаны:
а, а' - отсеки дизель-генераторов (поддерживается атмосферное давление),
б, б' - отсеки аккумуляторный,
в, в' - топливные отсеки,
г, г' - насосные отсеки,
д, д' - компрессорные отсеки (поддерживается атмосферное давление),
е, е' - хозяйственные отсеки,
ж, ж'- отсеки для воды,
з, з' - отсеки для компонентов воздуха,
и, и' - отсеки для хранения продуктов.
Каркас комплекса 4 выполнен в виде ферм из легкого сплава, обшитых листовым материалом. Объемы между наружными и внутренними листами обшивки заполнены теплоизолятором, например, теплизолом. Наружные поверхности защищены теплозащитным покрытием, например, в виде керамических плиток. На крыше комплекса 4 могут быть установлены раскрывающиеся солнечные батареи, входящие в состав системы энергообеспечения КС. В стене комплекса 4 (фиг. 2) смонтированы иллюминаторы. Порты для причаливания легких КА (условно не показаны) смонтированы на нижнем основании.
На внутреннем контуре нижнего основания 1 (фиг. 2) и верхнего основания 2 (фиг. 2) жестко закреплены пилонные кольца 7 (фиг. 2, 3) из фермовых конструкций. Внутри нижнего пилонного кольца 7 (фиг. 2) с помощью жестких подвесов 8 (фиг. 2, 3) установлена группа разгонных жидкостных реактивных двигателей 9 (фиг. 2, 3, 10), а на торцах пилонных колец в диаметрально противоположных точках - винтовые двигатели подрулирования 10 (фиг. 2, 9, 10) с электроприводами, используемые при маневрировании КС в атмосфере в горизонтальной плоскости.
На наружном контуре нижнего основания 1 жестко закреплены купольные конструкции 11 (фиг. 1, 2), образованные жесткими профилями 12 (фиг. 5, 6), полосами 13 (фиг. 5, 6) из титана. В нижних частях 14 и 15 купольных конструкций 11 (фиг. 1, 2) размещены жесткие отсеки емкостей горючего и окислителя реактивных двигателей, установленных на нижнем основании 1 (в каждой купольной конструкции размещена емкость только одного компонента в целях безопасной эксплуатации), емкости горючего системы энергообеспечения, отсеки оборудования 6 модулей управляемой плавучести. В верхней части купольной конструкции 11 размещены жесткие отсеки 16, 17 (фиг. 2) емкостей горючего и окислителя жидкостных реактивных двигателей, установленных под верхним основанием 2 (фиг. 10).
Все жесткие отсеки снаружи оснащены керамическими плитками.
В средней части купольных конструкций 11 размещены секции 18 (фиг. 2, 5, 6) оболочек для гелия, например, из кевлара. Каждая оболочка снабжена аварийным клапаном (условно не показан) для стравливания избыточного давления гелия с целью сохранения целостности самих оболочек. Сложенные оболочки занимают защищенную нижнюю часть секции 19 (фиг. 2, 6) и при наполнении их гелием занимают весь объем секции. Гелий в жидком состоянии находится в отсеках 20 в нижней части купольных конструкций 11.
Защита оболочек сверху в сложенном состоянии обеспечивается теплоизолированными крышками, состоящими из секторов 21 (фиг. 5, 6) на петлях. Секторы 21 (фиг. 5) удерживаются в полностью закрытом положении с помощью электромагнитных защелок 22 (фиг. 6), установленных на боковых поверхностях защищенных нижних частей секций 19 (фиг. 2, 5, 6), а в полностью открытом - с помощью электромагнитных клапанов 23 (фиг. 6), установленных на необходимой высоте на полосах 13 (фиг. 5, 6).
Суммарный объем секций при наполненных гелием оболочках позволяет поднять снаряженную КС на высоту порядка 20 км.
На вершинах купольных конструкций 11 (фиг. 2) установлены винтовые двигатели с электроприводом 24 (фиг. 2), которые вместе с винтами 25 (фиг. 2) защищены колпаками 26 (фиг. 2), а питание осуществляется от аккумуляторных батарей, размещенных в отсеках оборудования 5 и 6 (фиг. 2). Наружный контур верхнего основания 2 (фиг. 1, 2) служит, в том числе, бандажом жесткости для купольных конструкций 11 (фиг. 1, 2). На наружном контуре нижнего основания 1 (фиг. 2) жестко закреплены также стойки 27 (фиг. 2) убирающихся колесных шасси.
Даже при частичной компенсации силы тяжести за счет архимедовой силы все сооружение сможет легко передвигаться на колесах шасси по земле.
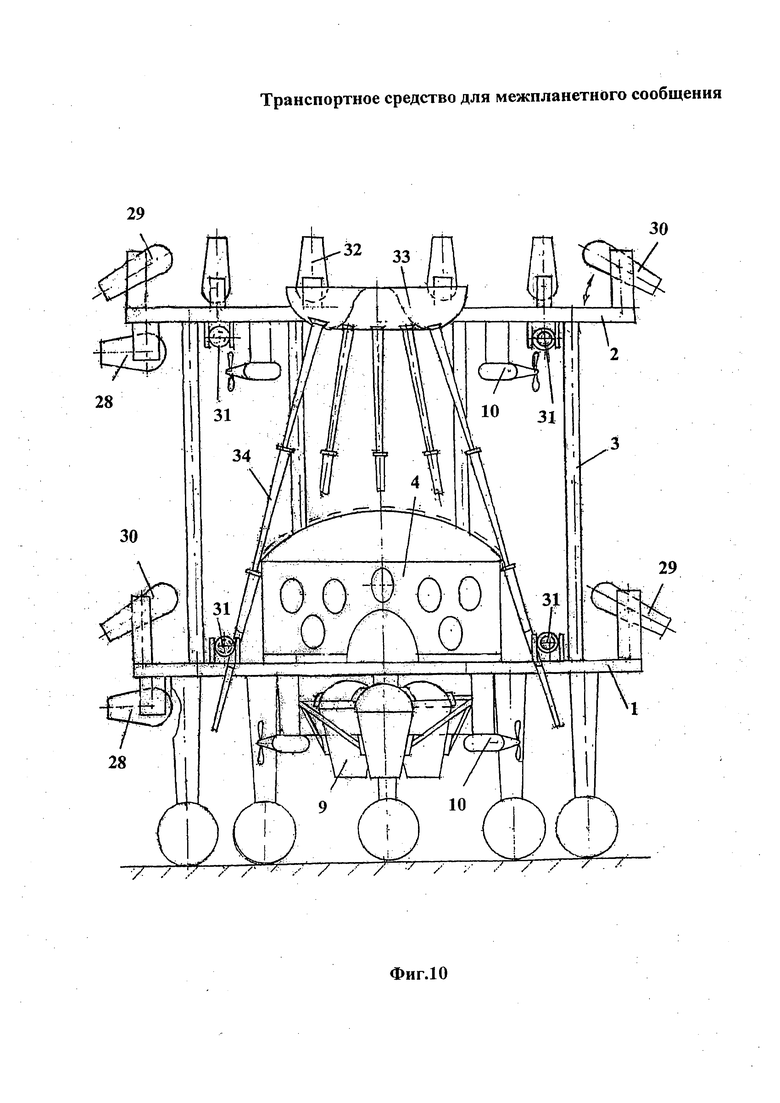
На внешнем контуре нижнего основания 1 и верхнего основания 2 установлены жидкостные реактивные двигатели 28 (фиг. 1, 10), используемые для компенсации сил тяжести при торможении, и попарно расположенные жидкостные реактивные двигатели 29, 30 (фиг. 10), используемые для ориентации КС в космическом пространстве, причем двигатели 29, 30 установлены с возможностью отклонения основного вектора тяги от вертикальной оси и для создания пары сил вращения КС вокруг нужной оси для ее ориентации в космическом пространстве. Двигатели 29, 30 могут фиксироваться в любом положении, например, с использованием шагового привода. При этом трубопроводы горючего и окислителя проходят через неподвижные цапфы оси вращения (условно не показаны).
На радиальных фермах нижнего основания 1 и верхнего основания 2 установлены жидкостные реактивные двигатели 31 (фиг. 1, 10) для обеспечения поворота КС вокруг главной оси.
На радиальных фермах, соединяющих внутренний и внешний контуры верхнего основания 2, жестко закреплены жидкостные реактивные двигатели 32 (фиг. 1, 2, 10). Двигатели 32 предназначены для торможения при сходе КС с орбиты и переходе на участок траектории плавного приземления.
Все необходимые трубопроводы (горючего, окислителя) и кабельные соединения, как и трубопроводы рабочего тела - гелия, проложены внутри ферм и труб каркаса (условно не показаны).
Между верхним и нижним основаниями каркаса 2 и 1 (фиг. 2, 10) размещено устройство пассивного торможения из жаропрочной стали, состоящее из заборной чаши 33 (фиг. 2, 10) в виде кольцевого желоба, жестко закрепленного на внутреннем контуре верхнего основания 2 (фиг. 2, 10), и сварных дроссельных труб 34 (фиг. 2, 10), закрепленных в дне заборной чаши 33 (фиг. 2, 10), на фермах каркаса комплекса 4 (фиг. 2, 10) и на внутреннем контуре нижнего основания 1 (фиг. 2). Чаша 33 и трубы 34 облицованы изнутри керамическими плитками. Описание функционирования КС.
Полностью снаряженная КС имеет в плане диаметр порядка 250 м и обладает малой отрицательной плавучестью за счет заполненных гелием оболочек некоторых секций 18 (фиг. 2). Поэтому КС может быть легко транспортирована в удобную точку старта с Земли. Старт начинается с вертикального подъема за счет архимедовой силы при постепенном заполнении гелием оболочек в секциях 19 (фиг. 2) и 18.
В секции 19 купольных конструкций 11 компрессоры перекачивают гелий из отсеков 20 (фиг. 2), электромагнитные защелки 22 (фиг. 6) освобождают секторы 21 (фиг. 5) для подъема их наполняющимися гелием оболочками из кевлара.
В процессе подъема КС перемещается в расчетную точку на космическую орбиту с помощью двигателей 10 (фиг. 2) перемещения в горизонтальной плоскости и удерживается в ней, электромагнитные клапаны 23 (фиг. 5) удерживают секторы 21 крышек (фиг. 5) в вертикальном положении, дизель-генераторы в отсеках оборудования первого этажа комплекса 4 (фиг. 7) подзаряжают аккумуляторные батареи. При движении в горизонтальной плоскости работают одна или две пары двигателей: одна из пар двигателей 10 и пара реактивных двигателей 31 (фиг. 1, 10) в случае, если курс не совпадает с осью пары двигателей 10.
Управление изменением курса осуществляется по команде пилота или программного устройства путем коммутации пар двигателей 31, оси которых наиболее близки по направлению к новому курсу («грубо») и необходимого «подрулирования» с помощью двигателей 31, совмещающих ось выбранной «грубо» пары 10 с новым курсом путем вращения КС вокруг ее вертикальной оси в нужную сторону на малый угол («точно»), после чего двигатели 31 выключаются, а двигатели 10 работают в режиме «тянитолкая» (для этого их винты вращаются в противоположные стороны). Применение такого приема в два этапа максимально сокращает радиус циркуляции и время совершения маневра.
По достижении предельной высоты подъема и расчетной точки старта включаются с медленным нарастанием суммарной силы тяги разгонные двигатели 9 (фиг. 2, 10), гелий из оболочек перекачивается компрессорами обратно в отсеки 20, клапаны 23 (фиг. 5) освобождают магнитные бобышки секторов 21 крышек для закрывания. КС оказывается «вывешенной», на что расходуется топлива и окислителя значительно меньше, чем при старте с Земли. Подготовка к выводу КС на расчетную орбиту заканчивается операциями выключения двигателей 31 и дизель-генераторов подзарядки аккумуляторов, свертывания и защиты всех оболочек секторами 21 (фиг. 5) с фиксацией их положения защелками 22 (фиг. 6). С включением разгонных двигателей 9 на полную мощность, КС сообщается скорость, необходимая дл выхода на расчетную орбиту.
Маневрирование в космосе выполняется с помощью двигателей 29, 30, 31 и 9 (фиг. 2, 10), которые являются и исполнительными органами системы ориентации КС. Приведение КС в рабочее состояние производится известным способом (расконсервация приборов и оборудования, раскрытие панелей солнечных батарей), после чего КС готова к выполнению намеченной программы.
Например, для буксирования легкого КА на новую орбиту достаточно выполнить следующие операции: причаливание легкого КА к одному из портов КС в расчетной точке ее орбиты; приведение нужных двигателей 9 в требуемое положение и включение их в расчетной точке траектории полета на время, необходимое для перехода КС на новую орбиту; отчаливание легкого КА от КС на новой орбите в расчетной точке и возврат двигателей 9 в исходное положение. После завершения всех операций КС может перейти к выполнению своей программы до ее полного завершения. Для перехода на околосолнечную орбиту КС достаточно придать в расчетной точке траектории полета необходимый импульс с помощью разгонного двигателя 9.
Для возвращения на Землю КС необходимо пройти несколько этапов, на каждом из которых выполняются следующие операции.
1. С помощью пар двигателей 29, 30 КС ориентируется в пространстве для перехода на максимально низкую круговую орбиту вокруг Земли за счет работы тормозных двигателей 32 (фиг. 2, 10).
2. На границе входа в атмосферу Земли включаются и постепенно увеличивают силу тяги двигатели 28 (фиг. 1, 10) для компенсации силы тяжести при торможении, тормозные двигатели 32 постепенно уменьшают силу тяги (на этом этапе эффективно работает пассивное тормозное устройство 33, 34 (фиг. 1, 2, 9), и при снижении скорости КС до порядка 200 км/час, КС и кресла с пилотами переводятся в положение, занимаемое ими при старте, двигатели 32, 28, 29, и 30 выключаются, при необходимости, после сбрасывания колпаков 26, включаются двигатели 24.
3. Включаются разгонные двигатели 9 (фиг. 2, 10) для «вывешивания» КС на заданной высоте в атмосфере, освобождаются секторы 21 (фиг. 5, 6) от удерживания их защелками 22 и начинается наполнение кевларовых оболочек гелием, при этом уменьшая суммарную тягу двигателей 9 настолько, чтобы КС снижалась плавно с уменьшением скорости снижения.
4. По достижении расчетной высоты над землей снижение КС прекращается (она оказывается «вывешенной» на заданной высоте), двигатели 10 (и 24, если были включены) выключаются, наполнение оболочек гелием прекращается и с помощью двигателей 10 выполняется горизонтальный полет в точку расчетного приземления.
5. Приземление осуществляется на выпущенные стойки 27 колесных шасси с выключенными двигателями 9 за счет уменьшения архимедовой силы путем перекачивания гелия из оболочек обратно в отсеки 20 и сжатия его до жидкого состояния.
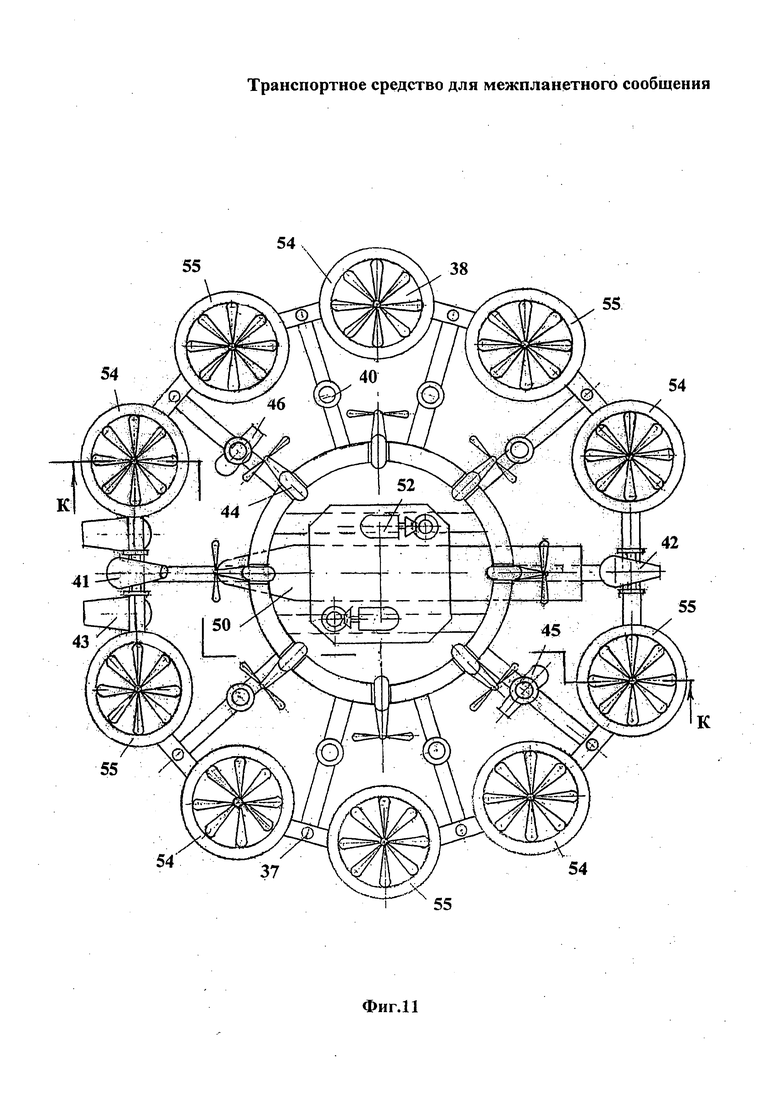
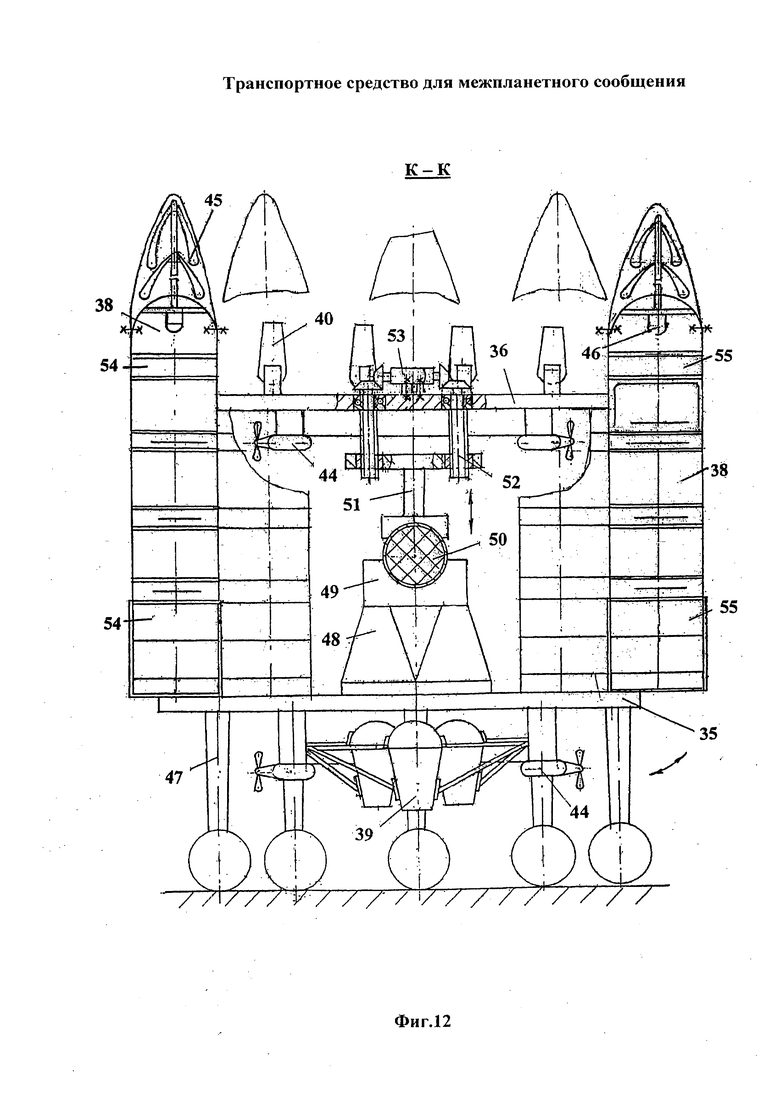
При использовании транспортного средства в качестве «космического лифта» (КЛ) для запуска ракет с околоземной орбиты, основу КЛ составляет каркас (фиг. 11, 12), аналогичный каркасу КС (в плане имеет не окружность, а овал). Каркас выполнен из нижнего 35 и верхнего 36 оснований, соединенных стяжками 37 в виде труб. На нем смонтированы, также аналогичные с КС, купольные конструкции 38 (фиг. 11, 12), разгонные жидкостные реактивные двигатели 39 (фиг. 11) повышенной мощности, жидкостные реактивные двигатели торможения 40 (фиг. 11, 12), жидкостные реактивные двигатели ориентации в пространстве 41 и 42 (фиг. 11, 13), жидкостные реактивные двигатели компенсации силы тяжести 43 (фиг. 11, 13) в процессе торможения в верхних слоях атмосферы при спуске, винтовые двигатели 44, 45, 46 для движения в атмосфере, стойки 47 (фиг. 11) с убирающимися колесными шасси. На внутреннем контуре нижнего основания 35 (фиг. 12) жестко установлена нижняя призма 48 со сменным ложементом 49 (фиг. 12) для ракеты 50 (фиг. 11, 12). На внутреннем контуре верхнего основания 36 (фиг. 12) установлен подвижный верхний фиксатор 51 (фиг. 12) с электроприводом, защищенный кожухом (не показан). При загрузке ракеты в «лифт» фиксатор 51 (фиг. 12) находится в предельном верхнем положении, а после установки ракеты в походное положение на ложементе 49 (фиг. 12), фиксатор зажимает ее с усилием, исключающим соскальзывание ракеты с ложемента. Перемещение фиксатора 51 (фиг. 12) осуществляется с помощью двух пар винт-гайка, винты которых 52 (фиг. 12) вращаются синхронно электродвигателями 53 (фиг. 12).
Увеличение габаритов оснований каркаса для облегчения размещения ракеты до овальной формы позволило разместить на внешних контурах большее число купольных конструкций и несколько уменьшить габарит всего сооружения.
Поскольку в этом варианте горючее для систем энерго- и жизнеобеспечения не требуется, емкости жестких отсеков горючего и окислителя 54, 55 (фиг. 12) для реактивных двигателей в купольных конструкциях (фиг. 11, 12) увеличены по сравнению с КС.
Описание функционирования КЛ.
Подготовка к старту, сам старт, вывод КЛ на расчетную орбиту и маневрирование на ней полностью аналогичны операциям с КС. В расчетной точке орбиты по командам системы управления верхний фиксатор 51 (фиг. 12) освобождает ракету, включаются маршевые двигатели самой ракеты и она плавно покидает ложемент. Облегченный КЛ полностью повторяет этапы плавного схода с орбиты и приземления КС по командам из центра управления или системы управления. Для осуществления повторного запуска потребуется только дозаправка и, при смене калибра ракеты, замена ложемента.
Для приема ракеты на околоземной орбите КЛ ориентируется необходимым образом, согласует свою скорость относительно ракеты так, чтобы расстояние между ними уменьшалось и в расчетное время зажимает ракету в ложементе. Операции плавного спуска описаны выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ (ВАРИАНТЫ) | 2015 |
|
RU2585380C1 |
| СПОСОБ ДОСТАВКИ НА ОРБИТУ СЫРЬЕВОГО ПРОДУКТА, РАКЕТНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА, РАКЕТА НА ЕЕ ОСНОВЕ, СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ, ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ТРАНСПОРТНО-ЗАПРАВОЧНАЯ СИСТЕМА | 2003 |
|
RU2299160C2 |
| МНОГОРАЗОВАЯ ПЕРВАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ | 2022 |
|
RU2790569C1 |
| СПОСОБ ОБСЛУЖИВАНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ И МНОГОРАЗОВАЯ АВИАЦИОННО-КОСМИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2342288C1 |
| МНОГОРАЗОВЫЙ УСКОРИТЕЛЬ ПЕРВОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 1999 |
|
RU2148536C1 |
| ВОЗВРАЩАЕМАЯ ВЕРХНЯЯ СТУПЕНЬ ДВУХСТУПЕНЧАТОЙ РАКЕТЫ-НОСИТЕЛЯ И СПОСОБ ЕЁ ПОСАДКИ | 2023 |
|
RU2818924C1 |
| АЭРОСТАТНЫЙ РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2682893C1 |
| АВТОНОМНЫЙ РАКЕТНЫЙ БЛОК | 1993 |
|
RU2043956C1 |
| ВОЗДУШНО-КОСМИЧЕСКАЯ СИСТЕМА | 2000 |
|
RU2165869C1 |
| ВОЗВРАЩАЕМАЯ ВЕРХНЯЯ СТУПЕНЬ ДВУХСТУПЕНЧАТОЙ РАКЕТЫ-НОСИТЕЛЯ И СПОСОБ ЕЁ ПОСАДКИ | 2022 |
|
RU2809408C1 |
Группа изобретений относится преимущественно к пилотируемым транспортным средствам (ТС) для полётов в ближнем и дальнем космосе. На каркасе ТС размещены модули управляемой аэростатической плавучести, электродвигатели с винтовыми движителями, жидкостные реактивные двигатели с емкостями горючего и окислителя, а также системы энергообеспечения и управления движением, обитаемый и технический отсеки, порты причаливания космических аппаратов, средства тепловой защиты обитаемого отсека и оборудования ТС. Плавучесть модулей обеспечивается путём перекачки из емкостей технического отсека жидкого гелия и его газификации под купольными конструкциями этих модулей (предусмотрен и обратный процесс). На ТС может быть установлен ложемент для размещения ракеты с полезным грузом, запускаемой или спускаемой с космической орбиты. Техническим результатом является расширение функциональных возможностей ТС данного назначения. 2 н. и 3 з.п. ф-лы, 13 ил.
1. Транспортное средство (ТС) межпланетного сообщения, характеризующееся тем, что оно включает:
- каркас с размещенным на нем комплексом модулей управляемой плавучести с купольными конструкциями;
- электродвигатели с винтовыми движителями;
- жидкостные реактивные двигатели (ЖРД) с неизменяемыми векторами реактивной тяги, системами энергообеспечения, ориентации и управления, а также убирающимися стойками шасси;
- емкости запасов горючего и окислителя для ЖРД;
- обитаемый отсек с системами жизнеобеспечения и портами причаливания космических аппаратов;
- емкости запасов горючего системы энергообеспечения;
- средства тепловой защиты обитаемого отсека и элементов оборудования ТС;
- модули управляемой плавучести выполнены с обеспечением возможности изменения плавучести транспортного средства (отрицательную или нулевую или положительную) за счет перекачки гелия, находящегося в жидком состоянии в емкостях, расположенных в технических помещениях под купольными конструкциями модулей управляемой плавучести, как в оболочки купольных конструкций, так и обратно в емкости для хранения гелия, сжимая при этом газообразный гелий снова до жидкого состояния посредством компрессоров;
- электродвигатели с винтовыми движителями, которые обеспечивают как горизонтальное перемещение в атмосфере планеты, так и перемещение транспортного средства по поверхности планеты на колесах шасси убирающихся стоек транспортного средства при условии обеспечения его отрицательной плавучести;
- ЖРД с неизменяемыми векторами реактивной тяги, используемые как в качестве разгонных, так и тормозных двигателей при посадке транспортного средства, причем векторы тяги разгонных ЖРД и тормозных ЖРД направлены навстречу друг другу и работают попеременно, при этом ЖРД с неизменяемыми векторами реактивной тяги используются в ТС в качестве поддерживающих транспортное средство, находящееся в горизонтальном положении, при его торможении в атмосфере планеты, так что вектор реактивной тяги данных двигателей направлен перпендикулярно к поверхности планеты;
- две пары ЖРД с изменяемыми векторами реактивной тяги, установленные на каркасе ТС и содержащие стационарные цапфы механизмов поворота самих двигателей, через которые осуществляется подача горючего и окислителя в камеры сгорания указанных ЖРД,
- пассивную систему торможения для снижения скорости в атмосфере планеты, размещенную на каркасе ТС над обитаемым отсеком и состоящую из заборной чаши, имеющей теплоизоляцию из керамических плиток, и расходящихся от данной чаши сварных дроссельных труб, также облицованных керамическими плитками,
при этом включение и совместная работа модулей, систем и узлов осуществляется как в автоматическом режиме, так и по командам пилота или дистанционно из центра управления вне ТС.
2. Транспортное средство по п. 1, отличающееся тем, что емкости запасов горючего и окислителя для ЖРД размещены в купольных конструкциях модулей управляемой плавучести, причем емкости в каждом модуле предназначены только для одного из компонентов.
3. Транспортное средство по п. 2, отличающееся тем, что купольные конструкции модулей управляемой плавучести включают секции оболочек, снабженных многосекторными теплоизоляционными крышками и устройствами удержания секторов крышек в закрытом и полностью открытом положениях.
4. Транспортное средство по п. 1, отличающееся тем, что система энергообеспечения включает подсистемы выработки электроэнергии на различных физических принципах, работающие поочередно или одновременно в различных сочетаниях.
5. Транспортное средство по п. 1, отличающееся тем, что на каркасе установлен ложемент для размещения и закрепления ракеты с полезным грузом, запускаемой или спускаемой с космической орбиты.
| WO 2014021741 A2, 06.02.2014 | |||
| WO 2008025139 A1, 06.03.2008 | |||
| US 20050116091 A1, 02.06.2005 | |||
| WO 2006119056 A3, 09.11.2006 | |||
| ВЫСОКОСКОРОСТНАЯ ТРАНСПОРТНАЯ СИСТЕМА, РОТОРНО-ЦИЛИНДРОВЫЙ ДВИГАТЕЛЬ, МНОГОРАЗОВАЯ НАЗЕМНО-ВОЗДУШНАЯ И МНОГОРАЗОВАЯ ВОДНО-ВОЗДУШНАЯ КОСМИЧЕСКИЕ СИСТЕМЫ | 2001 |
|
RU2217358C2 |
| ДВИГАТЕЛЬ, ВЕРТОЛЕТ, МЕЛКОВОДНОЕ СУДНО | 1999 |
|
RU2153088C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ НА ОСНОВЕ ДИРИЖАБЛЯ С ЭЛЕКТРОДВИГАТЕЛЕМ | 2011 |
|
RU2478518C1 |
| RU 2005120143 А, 10.01.2007 | |||
| RU 2005108919 А, 10.09.2006. | |||

