Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству и способу для управления двигателем внутреннего сгорания для транспортного средства с механизмом трансмиссии и, более конкретно, к управлению степенью сжатия двигателя внутреннего сгорания, имеющего механизм переменной степени сжатия, который изменяет механическую степень сжатия.
Уровень техники
[0002] Традиционно известны различные типы механизмов переменной степени сжатия, которые изменяют механические степени сжатия двигателей внутреннего сгорания. Например, заявитель настоящей заявки предложил множество механизмов переменной степени сжатия типа, способного перемещать вверх и вниз положение верхней мертвой точки поршня посредством изменения геометрии рычагов многорычажного поршневого кривошипно-шатунного механизма. Также известны механизмы переменной степени сжатия такого типа, которые могут изменять механическую степень сжатия посредством перемещения вверх и вниз положения цилиндра относительно центральной позиции коленчатого вала.
[0003] В основном, предпочтительно для механизма переменной степени сжатия задавать степень сжатия настолько высокой, насколько возможно, в диапазоне, который не вызывает ненормального сгорания, такого как детонация. Таким образом, целевая степень сжатия, как правило, имеет тенденцию становиться выше, когда нагрузка уменьшается. Например, патентный документ 1 раскрывает технологию работы механизма переменной степени сжатия с тем, чтобы управлять степенью сжатия со ссылкой на карту степени сжатия, в которой оптимальная целевая степень сжатия ранее была определена с помощью нагрузки и скорости вращения (об/мин) двигателя внутреннего сгорания в качестве параметров. В одном примере этой технологии механическая степень сжатия постоянно изменяется и управляется в диапазоне от 10 до 16.
[0004] Патентный документ 2 раскрывает технологию для управления двигателем внутреннего сгорания транспортного средства с помощью механизма переменной степени сжатия с тем, чтобы изменять степень сжатия в направлении, которое уменьшает толчок, вызванный инерционным моментом во время операции изменения скорости трансмиссии.
[0005] Патентный документ 1 конкретно не упоминает соотношение между степенью понижения скорости (передаточным отношением) трансмиссии и управлением степенью сжатия. Однако технология патентного документа 1 представляет проблему ухудшения в управляемости транспортного средства, вызванного большим изменением степени сжатия в ответ на управление водителем педалью акселератора (эквивалентно запрашиваемой нагрузке), когда транспортное средство управляется с точной регулировкой скорости транспортного средства в состоянии высокой степени понижения скорости. В частности, механизм переменной степени сжатия, использующий механические работы, неизбежно вызывает задержку в срабатывании в ответ на действие, так что изменения фактической степени сжатия задерживаются относительно быстрых изменений запрашиваемой нагрузки. Это ведет к возникновению изменения крутящего момента в непредусмотренный водителем момент времени, что может приводить в результате к ухудшению управляемости транспортного средства.
[0006] Патентный документ 2 не предоставляет какого-либо решения для вышеописанной проблемы управляемости транспортного средства на основе степени понижения скорости трансмиссии.
Документы предшествующего уровня техники
Патентный документ
[0007] Патентный документ 1: Японская выложенная патентная публикация № 2004-92639.
Патентный документ 2: Японская выложенная патентная публикация № 2011-144784.
Сущность изобретения
[0008] Настоящее изобретение предоставляет устройство управления для управления двигателем внутреннего сгорания для транспортного средства, причем двигатель внутреннего сгорания имеет механизм переменной степени сжатия, чтобы изменять механическую степень сжатия, транспортное средство имеет механизм трансмиссии, расположенный между двигателем внутреннего сгорания и ведущими колесами, чтобы изменять степень понижения скорости, устройство управления выполнено с возможностью задавать механическую степень сжатия на основе режимов работы двигателя, при этом устройство управления изменяет диапазон управления механической степени сжатия согласно степени понижения скорости.
[0009] А именно, настоящее изобретение характеризуется тем, что, в то время как механическая степень сжатия механизма переменной степени сжатия задается на основе режимов работы двигателя, таких как нагрузка двигателя и скорость вращения (об/мин), диапазон управления механической степени сжатия (т.е. ширина изменения между нижним и верхним предельными значениями механической степени сжатия) изменяется согласно степени понижения скорости.
[0010] В предпочтительном аспекте настоящего изобретения диапазон управления механической степени сжатия ограничивается более узким диапазоном, когда степень понижения скорости является более высокой; и диапазон управления механической степени сжатия ограничивается более узким диапазоном во время движения задним ходом, чем во время движения передним ходом.
[0011] Ухудшение управляемости транспортного средства пресекается посредством задания диапазона управления механической степени сжатия согласно степени понижения скорости, как упомянуто выше.
[0012] Соответственно, представляется возможным в настоящем изобретении пресекать изменение крутящего момента, возникающее в непредусмотренный водителем момент времени, и тем самым получать улучшение в управляемости транспортного средства, поскольку диапазон управления механической степени сжатия переменно задается согласно степени понижения скорости механизма трансмиссии.
Краткое описание чертежей
[0013] Фиг. 1 – это схематичный чертеж конфигурации системы транспортного средства с устройством управления согласно одному варианту осуществления настоящего изобретения.
Фиг. 2 – это блок-схема для управления степенью сжатия и управления степенью понижения скорости, выполняемых посредством устройства управления согласно одному варианту осуществления настоящего изобретения.
Фиг. 3 – это блок-схема последовательности операций для управляющей обработки, выполняемой посредством устройства управления согласно одному варианту осуществления настоящего изобретения.
Фиг. 4 – это характеристический график первой карты степени сжатия, используемой устройством управления в состоянии низкой степени понижения скорости согласно одному варианту осуществления настоящего изобретения.
Фиг. 5 – это характеристический график второй карты степени сжатия, используемой устройством управления в состоянии высокой степени понижения скорости согласно одному варианту осуществления настоящего изобретения.
Фиг. 6 – это характеристический график карты степени сжатия для движения задним ходом, используемой устройством управления при выборе положения заднего хода согласно одному варианту осуществления настоящего изобретения.
Фиг. 7 – это временная диаграмма, показывающая изменения в режимах работы согласно одному варианту осуществления настоящего изобретения во время ускорения из состояния низкой скорости транспортного средства.
Фиг. 8 – это временная диаграмма, показывающая изменения в режимах работы согласно одному варианту осуществления настоящего изобретения во время движения задним ходом при выборе положения заднего хода.
Подробное описание вариантов осуществления
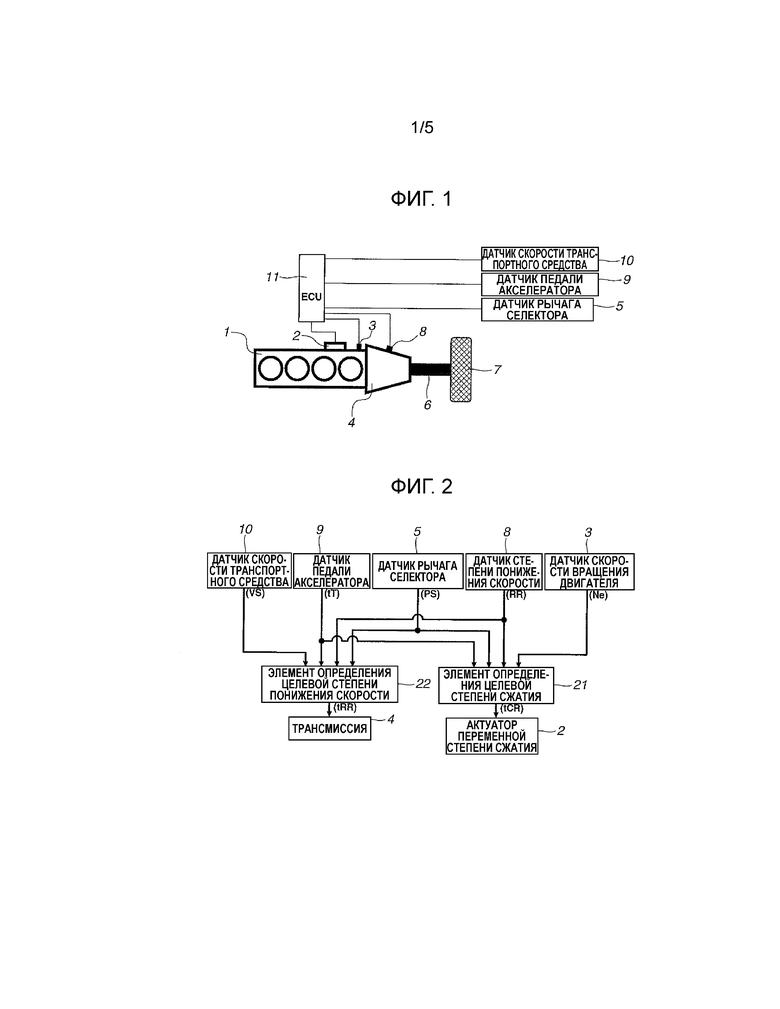
[0014] Фиг. 1 – это схематичный чертеж конфигурации системы транспортного средства с двигателем 1 внутреннего сгорания и устройством управления согласно одному варианту осуществления настоящего изобретения.
[0015] Двигатель 1 внутреннего сгорания имеет известный механизм степени сжатия (не обозначен на чертеже), который перемещает вверх и вниз положение верхней мертвой точки поршня, изменяя геометрию рычагов многорычажного поршневого кривошипно-шатунного механизма. Механизм переменной степени сжатия оснащен актуатором 2 переменной степени сжатия, таким как электромотор, чтобы изменять геометрию рычагов, т.е. изменять механическую степень сжатия (далее в данном документе также просто называемую "степенью сжатия"). Автоматическая трансмиссия 4, использующая механизм бесступенчатой трансмиссии ременного типа, соединена с двигателем 1 внутреннего сгорания. Приводной вал 6 приводится в движение посредством выходного вала трансмиссии 4 через дифференциальную передачу с тем, чтобы приводить в движение ведущие колеса 7.
[0016] Автоматическая трансмиссия 4 имеет множество диапазонов приведения в движение, включающих в себя диапазон переднего хода (D-диапазон) для движения передним ходом, диапазон заднего хода (R-диапазон) для движения задним ходом и нейтральный диапазон (N-диапазон). Любой один из диапазонов приведения в движение выбирается в зависимости от положения рычага селектора (не показан), управляемого водителем. Датчик 5 рычага селектора предусмотрен на рычаге селектора с тем, чтобы определять диапазон приведения в движение (т.е. позицию PS селектора), выбранный водителем. Датчик 8 степени понижения скорости предусмотрен в трансмиссии 4 с тем, чтобы определять фактическую степень RR понижения скорости механизма бесступенчатой трансмиссии для трансмиссии 4. Трансмиссия 4 может альтернативно быть сконфигурирована как автоматическая трансмиссия, которая выполняет операцию изменения скорости посредством изменения передач.
[0017] Предусматриваются датчик 9 педали акселератора для определения открытия педали акселератора (т.е. запрашиваемой нагрузки tT), управляемой водителем, и датчик 3 скорости вращения двигателя для определения скорости (об/мин) Ne вращения двигателя внутреннего сгорания, так что эти параметры определяются в качестве режимов работы двигателя 1 внутреннего сгорания. Предусматривается датчик 10 скорости транспортного средства для определения скорости движения транспортного средства, т.е. скорости VS транспортного средства. Также предусматриваются различные другие датчики, включающие в себя расходомер воздуха для определения объема всасываемого воздуха во впускном канале двигателя внутреннего сгорания, датчик температуры охлаждающей жидкости для определения температуры охлаждающей жидкости в двигателе внутреннего сгорания и датчик отношения воздух-топливо для определения отношения воздух-топливо выхлопного газа на стороне выше по потоку от каталитического нейтрализатора для очистки выхлопного газа в выпускном канале двигателя внутреннего сгорания, хотя он специально не относится к настоящему изобретению и, таким образом, не показан на чертежах. Сигналы определения датчиков вводятся в блок 11 управления. На основе сигналов определения датчиков актуатор 2 переменной степени сжатия приводится в действие с тем, чтобы регулировать механическую степень сжатия к ее целевому значению. Аналогично, автоматическая трансмиссия 4 задействуется так, чтобы регулировать степень понижения скорости к ее целевому значению согласно требованию водителя и режимам работы транспортного средства.
[0018] Фиг. 2 – это блок-схема для управления степенью сжатия и управления степенью понижения скорости, выполняемых посредством блока 11 управления. В блоке управления элемент 21 определения целевой степени сжатия предоставляется с множеством предварительно определенных карт степени сжатия, как будет объяснено позже, и выполнен с возможностью выбирать любую одну из карт степени сжатия в зависимости от положения PR селектора, определенного посредством датчика 5 рычага селектора, и фактической степени PR понижения скорости, определенной посредством датчика 8 степени понижения скорости, определять целевое значение механической степени сжатия, т.е. целевую степень tCR сжатия, на основе запрашиваемой нагрузки tT, определенной посредством датчика 9 педали акселератора, и скорости Ne вращения двигателя, определенной посредством датчика 3 скорости вращения двигателя со ссылкой на выбранную карту степени сжатия, и затем приводить в действие актуатор 2 переменной степени сжатия согласно целевой степени tCR сжатия. Дополнительно, элемент 22 определения целевой степени понижения скорости выполнен с возможностью определять целевую степень tRR понижения скорости автоматической трансмиссии 4 на основе скорости VS транспортного средства, определенной посредством датчика 10 скорости транспортного средства, запрашиваемой нагрузки tT, определенной посредством датчика 9 педали акселератора, положения PS рычага селектора и фактической степени RR понижения скорости, определенной посредством датчика 8 степени понижения скорости, и затем управлять автоматической трансмиссией 4 согласно целевой степени tRR понижения скорости.
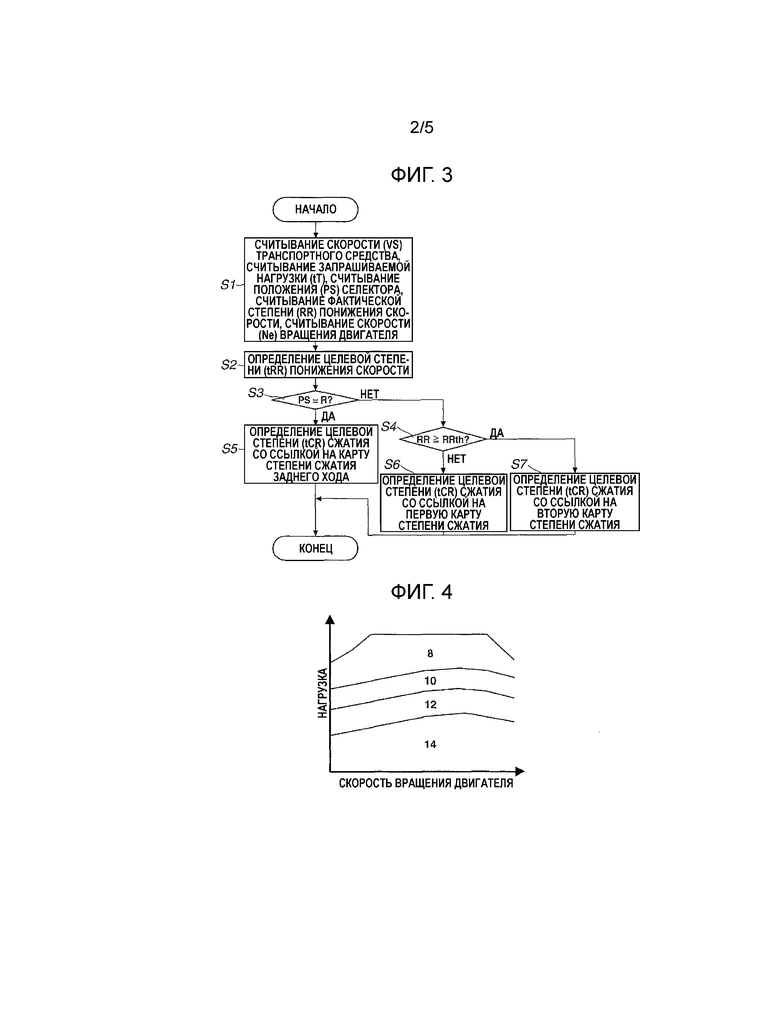
[0019] Фиг. 3 – это блок-схема последовательности операций для управления степенью сжатия и управления степенью понижения скорости, выполняемых посредством блока 11 управления двигателем. На этапе 1 скорость VS транспортного средства, запрашиваемая нагрузка tT, положение PS селектора, фактическая степень RR понижения скорости и скорость Ne вращения двигателя считываются.
[0020] На этапе 2 целевая степень tRR понижения скорости определяется на основе скорости VS транспортного средства, запрашиваемой нагрузки tT, положения PS селектора и фактической степени RR понижения скорости.
[0021] На этапе 3 оценивается, является ли положение PS селектора положением заднего хода (R-диапазон). Когда положение селектора является положением заднего хода, управление переходит к этапу 5. На этапе 5 целевая степень tT сжатия определяется после выбора предварительно определенной карты степени сжатия заднего хода в качестве карты настройки степени сжатия. Более конкретно, целевая степень tCR сжатия определяется согласно запрашиваемой нагрузке tT и скорости Ne вращения двигателя со ссылкой на карту степени сжатия заднего хода.
[0022] Когда положение селектора не является положением заднего хода, управление переходит к этапу 4. На этапе 4 оценивается, выше или равна фактическая степень RR понижения скорости предварительно определенному пороговому значению RRth. Когда фактическая степень RR понижения скорости ниже порогового значения RRth, управление переходит к этапу 6. На этапе 6 предварительно определенная первая карта степени сжатия выбирается в качестве карты настройки степени сжатия, и затем целевая степень tCR сжатия определяется согласно запрашиваемой нагрузке tT и скорости Ne вращения двигателя со ссылкой на первую карту степени сжатия. Когда фактическая степень RR понижения скорости выше или равна пороговому значению RRth, управление переходит к этапу 7. На этапе 7 предварительно определенная вторая карта степени сжатия выбирается в качестве карты настройки степени сжатия, и затем целевая степень tCR сжатия определяется согласно запрашиваемой нагрузке tT и скорости Ne вращения двигателя со ссылкой на вторую карту степени сжатия.
[0023] В первой и второй картах степени сжатия оптимальное значение механической степени сжатия определяется с помощью запрашиваемой нагрузки и скорости вращения двигателя в качестве параметров. Фиг. 4 является характеристическим графиком первой карты степени сжатия, используемой на этапе 6. Фиг. 5 является характеристическим графиком второй карты степени сжатия, используемой на этапе 7. Как показано на чертежах, каждая из первой и второй карт степени сжатия имеет тенденцию задавать высокую степень сжатия на стороне низкой нагрузки и задавать более низкую степень сжатия, когда нагрузка становится более высокой. Первая карта степени сжатия выбирается, когда фактическая степень RR понижения скорости является низкой. В первой карте степени сжатия степень сжатия изменяется в диапазоне от значения степени сжатия области максимальной нагрузки, равного 8, до значения степени сжатия области низкой нагрузки, равного 14. Вторая карта степени сжатия выбирается, когда фактическая степень RR понижения скорости является высокой. Во второй карте степени сжатия степень сжатия задается в максимальное значение степени сжатия, равное 12, в области низкой нагрузки и изменяется в диапазоне от значения степени сжатия области максимальной нагрузки, равного 8 до значения степени сжатия области низкой нагрузки, равного 12.
[0024] А именно, ширина изменения степени сжатия, т.е. диапазон переменного управления степени сжатия задается в диапазон "от 8 до 14" в первой карте степени сжатия для низкой фактической степени RR понижения скорости. С другой стороны, диапазон переменного управления степени сжатия ограничивается относительно узким диапазоном "от 8 до 12" во второй карте степени сжатия для высокой фактической степени RR понижения скорости. В частности, область степени сжатия, равной 12, задается более широкой во второй карте степени сжатия, чем в первой карте степени сжатия, так что, когда фактическая степень RR понижения скорости является низкой, степень сжатия на стороне более низкой нагрузки, равная 14, ограничивается степенью сжатия, равной 12, в настоящем варианте осуществления. В данном документе отмечается, что настоящее изобретение не ограничено таким вариантом осуществления. Карта степени сжатия может быть предоставлена с различными характеристиками управления, включающими в себя области более низких степеней сжатия, равных 8 и 10.
[0025] Фиг. 6 – это характеристический график карты степени сжатия заднего хода, используемой во время движения задним ходом, т.е. выбора положения заднего хода (R-диапазона) в качестве положения PS селектора. В карте степени сжатия заднего хода оптимальное значение механической степени сжатия также определяется с помощью запрашиваемой нагрузки и скорости вращения двигателя в качестве параметров. Карта степени сжатия заднего хода имеет тенденцию задавать высокую степень сжатия на стороне низкой нагрузки и задавать более низкую степень сжатия, когда нагрузка становится более высокой. В карте степени сжатия заднего хода степень сжатия задается в максимальное значение степени сжатия, равное 10, в области низкой нагрузки и ограничивается диапазоном переменного управления от значения степени сжатия области максимальной нагрузки, равного 8, до значения степени сжатия области низкой нагрузки, равного 10. А именно, диапазон переменного управления степени сжатия задается более узким в карте степени сжатия заднего хода, чем в соответствующих первой и второй картах степени сжатия. В частности, область степени сжатия, равная 10, задается более широкой в карте степени сжатия заднего хода, чем в первой карте степени сжатия, так что, когда фактическая степень RR понижения скорости является низкой, степени сжатия на стороне более низкой нагрузки, равные 14 и 12, ограничиваются степенью сжатия, равной 10, в настоящем варианте осуществления. В данном документе отмечается, что настоящее изобретение не ограничено таким вариантом осуществления. Карта степени сжатия может быть предоставлена с различными характеристиками управления, включающими в себя область более низкой степени сжатия, равной 8.
[0026] Представляется возможным улучшать эксплуатационные качества транспортного средства, ограничивая диапазон переменного управления степени сжатия относительно узким диапазоном, когда фактическая степень RR сжатия является высокой, и когда транспортное средство движется задним ходом. Например, когда транспортное средство движется с точной регулировкой скорости транспортного средства в состоянии низкой скорости транспортного средства, возникают частые изменения между степенью сжатия, равной 14, и степенью сжатия, равной 12, в случае использования первой карты степени сжатия все время. Это ведет к ухудшению управляемости транспортного средства. Напротив, такие необязательные изменения степени сжатия не возникают в случае использования второй карты степени сжатия, в которой область степени сжатия, равной 12, расширена до области низкой нагрузки. Во время выбора положения заднего хода, что часто используется для так называемой гаражной парковки и т.д., дополнительно ограничивается диапазон управления степени сжатия, в котором область степени сжатия, равная 10, расширена. Таким образом, пресекается возникновение непреднамеренного изменения крутящего момента вследствие изменений степени сжатия.
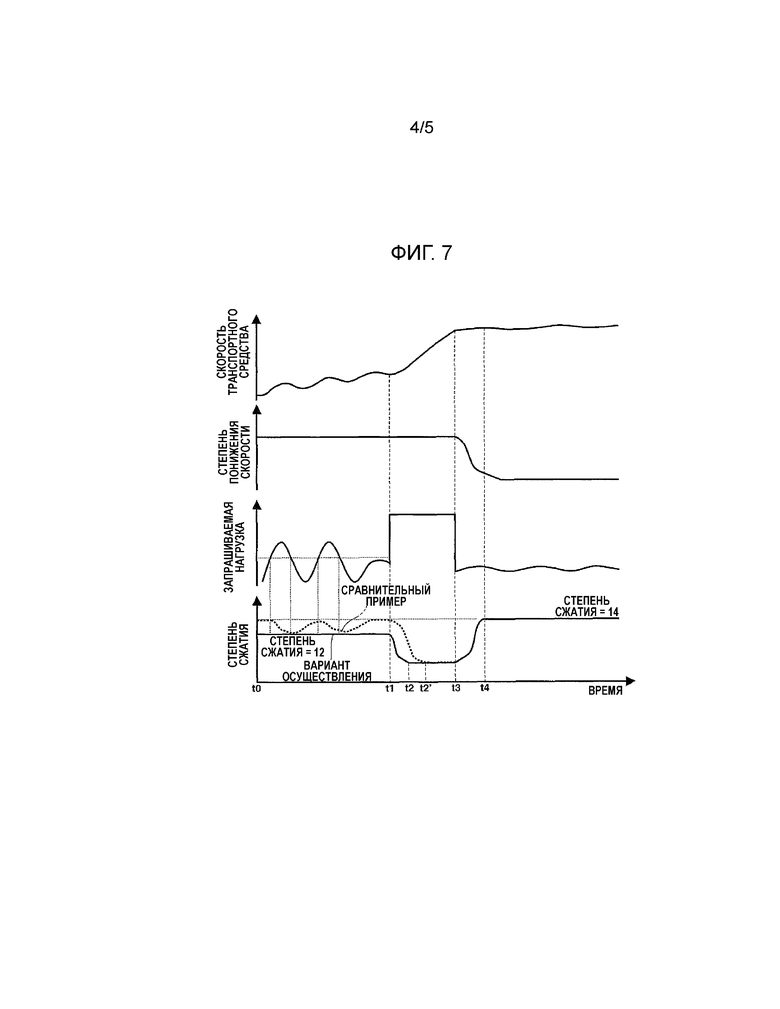
[0027] Фиг. 7 – это временная диаграмма, показывающая, в качестве примера, изменения степени сжатия и другие режимы работы во время ускорения из состояния низкой скорости транспортного средства.
[0028] В этом примере период от момента t0 времени до момента t1 времени соответствует состоянию, когда транспортное средство постепенно ускоряется с точной регулировкой скорости транспортного средства водителем в области низкой скорости транспортного средства. Степень понижения скорости устанавливается в высокое значение, когда скорость транспортного средства является низкой. В течение этого периода запрашиваемая нагрузка (т.е. величина нажатия педали акселератора) неоднократно увеличивается и уменьшается в области относительно низкой нагрузки для регулировки скорости транспортного средства. Поскольку фактическая степень RR понижения скорости является высокой, целевая степень tCR сжатия задается со ссылкой на вторую карту степени сжатия на фиг. 5 в настоящем варианте осуществления. В результате степень сжатия поддерживается практически постоянной около 12.
[0029] Период от момента t1 времени до момента t2 времени соответствует состоянию, когда транспортное средство ускоряется с нажатием педали акселератора водителем. В течение этого периода степень сжатия уменьшается, когда запрашиваемая нагрузка tT скачкообразно увеличивается. В этом примере степень сжатия уменьшается до "8" на основе второй карты степени сжатия.
[0030] В момент t3 времени ускорение заканчивается. Когда запрашиваемая нагрузка tT уменьшается, транспортное средство переходит в состояние равномерного движения с постоянной скоростью транспортного средства. В течение периода от момента t3 времени до момента t4 времени степень сжатия увеличивается с уменьшением в запрашиваемой нагрузке tT. Одновременно степень понижения скорости уменьшается с уменьшением в запрашиваемой нагрузке. Карта настройки степени сжатия затем переключается со второй карты степени сжатия на первую карту степени сжатия. В результате степень сжатия увеличивается до "14" в соответствии с низкой запрашиваемой нагрузкой tT.
[0031] Пунктирная линия на чертеже показывает, в качестве сравнительного примера, изменение степени сжатия в случае использования первой карты степени сжатия, в которой диапазон управления степени сжатия является "от 8 до 14" независимо от фактической степени RR понижения скорости. В этом случае рабочее состояние неоднократно изменяется между степенью сжатия 12 и степенью сжатия 14 в первой карте степени сжатия в ответ на быстрые изменения запрашиваемой нагрузки tT в течение периода от момента t0 времени до момента t1 времени. Таким образом, происходят неоднократные относительно большие изменения степени сжатия. Кроме того, фактическая степень сжатия реагирует с задержкой на изменения запрашиваемой нагрузки tT вследствие неизбежной задержки реакции механически работающего механизма переменной степени сжатия. Следовательно, изменения степени сжатия задерживаются относительно срабатывания педали акселератора в состоянии низкой скорости транспортного средства/высокой степени понижения скорости. Это приводит в результате к большому изменению движущей силы в непредусмотренный водителем момент времени, в силу чего становится очень трудно выполнять точную регулировку скорости транспортного средства.
[0032] В сравнительном примере степень сжатия увеличивается до "14" в момент непосредственно перед временем t1, так что уменьшение степени сжатия задерживается, когда ускорение начинается в момент t1 времени, по сравнению с характеристиками настоящего варианта осуществления, указанными сплошной линией на чертеже. Более конкретно, тогда как степень сжатия уменьшается до минимального значения степени сжатия, равного "8", в момент t2 времени в настоящем варианте осуществления, как указано сплошной линией, степень сжатия уменьшается до минимального значения степени сжатия, равного "8", в задержанный момент t2' времени в сравнительном примере, как указано пунктирной линией. Это приводит в результате к более длительному продолжению состояния, когда степень сжатия является высокой относительно нагрузки, в силу чего топливная экономичность ухудшается или фактический крутящий момент двигателя 1 внутреннего сгорания становится меньше намерения водителя вследствие выполнения принудительной задержки момента зажигания для предотвращения детонации.
[0033] Представляется возможным в настоящем варианте осуществления пресекать вышеописанные проблемы сравнительного примера, такие как ухудшение управляемости транспортного средства в области низкой скорости транспортного средства и задержка в уменьшении степени сжатия во время ускорения.
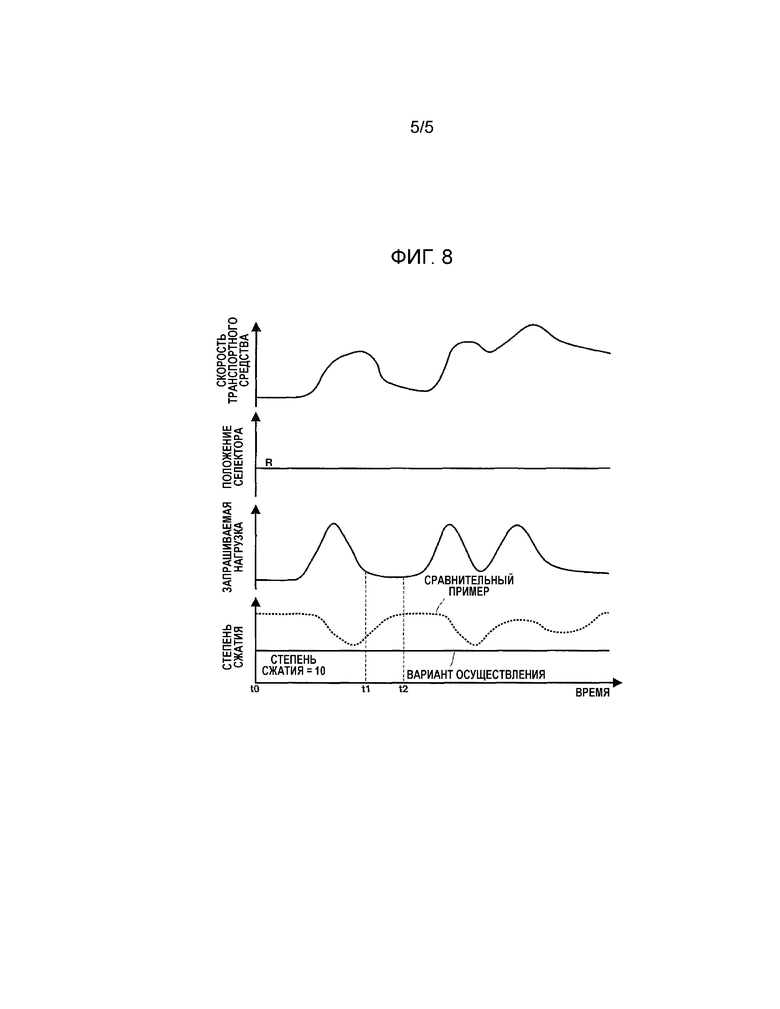
[0034] Фиг. 8 – это временная диаграмма, показывающая изменения режимов работы во время движения задним ходом транспортного средства при переключении автоматической трансмиссии 4 в положение заднего хода. В частности, чертеж предполагает движение задним ходом в состоянии очень низкой скорости транспортного средства, например, при парковке. На чертеже каждая волна графика запрашиваемой нагрузки соответствует водительскому действию легкого нажатия и немедленного отпускания педали акселератора. В настоящем варианте осуществления степень сжатия управляется со ссылкой на карту степени сжатия заднего хода на фиг. 6. Поскольку запрашиваемая нагрузка tT изменяется вверх и вниз на стороне относительно низкой нагрузки, транспортное средство приводится в движение со степенью сжатия, поддерживаемой равной "10". Таким образом, не возникает непредусмотренного водителем изменения крутящего момента вследствие изменений степени сжатия, в силу чего достаточно просто выполнять точную регулировку скорости транспортного средства в состоянии очень низкой скорости транспортного средства, например, во время парковки.
[0035] Пунктирная линия на чертеже указывает, в качестве сравнительного примера, изменение степени сжатия в случае использования, например, второй карты степени сжатия на фиг. 6, даже при выборе положения заднего хода. В этом случае, степень сжатия изменяется согласно запрашиваемой нагрузке tT (т.е. величине нажатия педали акселератора) с неизбежной задержкой реакции. Например, педаль акселератора отпускается обратно в свою позицию педали водителем в момент t1 времени. Однако увеличение фактической степени сжатия задерживается, так что фактическая степень сжатия увеличивается с момента t1 времени до момента t2 времени. Это приводит в результате к уменьшению фактической движущей силы меньше намерения водителя, в силу чего становится очень трудно выполнять точную регулировку скорости транспортного средства.
[0036] Хотя настоящее изобретение было описано со ссылкой на вышеописанный примерный вариант осуществления, настоящее изобретение не ограничивается вышеописанным примерным вариантом осуществления. Возможны различные изменения и модификации вышеописанного примерного варианта осуществления.
В вышеописанном варианте осуществления механизм переменной степени сжатия является типом, использующим многорычажный поршневой кривошипно-шатунный механизм. В настоящем изобретении, однако, механизм переменной степени сжатия не ограничивается таким типом. Настоящее изобретение может быть применено к двигателям внутреннего сгорания с различными типами механизмов переменной степени сжатия.
[0037] В вышеописанном варианте осуществления используется одна карта степени сжатия заднего хода, когда выбирается положение заднего хода. Альтернативно, может быть использовано множество карт степени сжатия заднего хода, как и в случае движения передним ходом. Дополнительно, альтернативно возможно использовать карту степени сжатия заднего хода на фиг. 6, когда степень понижения скорости является высокой при выборе положения заднего хода, и использовать либо первую карту степени сжатия на фиг. 4, либо вторую карту степени сжатия на фиг. 5, когда степень понижения скорости является низкой даже при выборе положения заднего хода.
[0038] Кроме того, актуатор 2 механизма переменной степени сжатия управляется посредством управления с обратной связью на основе различия между целевой степенью tCR сжатия и фактической степенью сжатия, определенной посредством какого-либо датчика. Коэффициент усиления системы управления с обратной связью может изменяться согласно фактической степени RR понижения скорости, так что скорость изменения степени сжатия уменьшается, когда фактическая степень RR понижения скорости является более высокой. В этом случае представляется возможным пресекать изменение крутящего момента, возникающее вследствие чувствительных изменений степени сжатия, например, когда скорость транспортного средства является низкой, а фактическая степень RR понижения скорости является высокой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2624481C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2505432C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2615083C1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ | 2015 |
|
RU2676170C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
| СПОСОБ УПРАВЛЕНИЯ И УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2670343C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2686977C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668448C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2671593C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |

Изобретение относится к управлению степенью сжатия двигателя внутреннего сгорания, имеющего механизм переменной степени сжатия, который изменяет механическую степень сжатия. В транспортном средстве с автоматической трансмиссией (4) двигатель внутреннего сгорания снабжается механизмом переменной степени сжатия. Целевая степень tCR сжатия механизма переменной степени сжатия определяется со ссылкой на карту степени сжатия, в которой целевое значение степени сжатия было ранее определено с помощью запрашиваемой нагрузки tT и скорости Ne вращения двигателя в качестве параметров. Карта степени сжатия заднего хода выбирается, когда автоматическая трансмиссия находится в положении заднего хода; первая карта степени сжатия выбирается, когда фактическая степень RR понижения скорости трансмиссии является низкой; и вторая карта степени сжатия выбирается, когда фактическая степень RR понижения скорости трансмиссии является низкой (S3-S7). Переменный диапазон управления степени сжатия является более узким во второй карте степени сжатия для высокой степени понижения скорости, чем в первой карте степени сжатия, и является более узким в карте степени сжатия заднего хода, чем в первой и второй картах степени сжатия. Техническим результатом является пресечение возникновения непредусмотренного изменения крутящего момента вследствие изменений степени сжатия, когда степень понижения скорости является высокой. 2 н. и 3 з.п. ф-лы, 8 ил.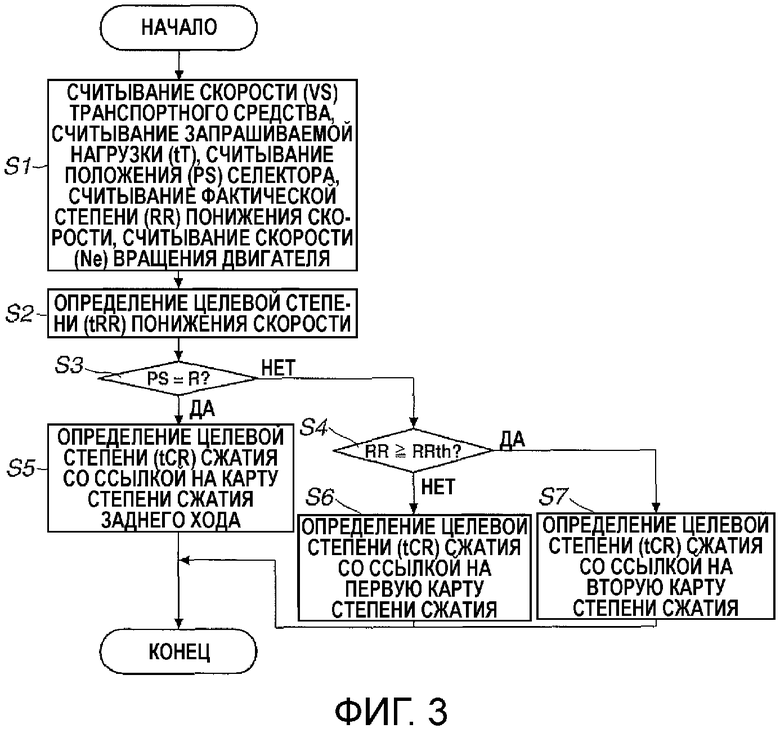
1. Устройство управления для управления двигателем внутреннего сгорания для транспортного средства, причем двигатель внутреннего сгорания имеет механизм переменной степени сжатия, чтобы изменять механическую степень сжатия, а транспортное средство имеет механизм трансмиссии, расположенный между двигателем внутреннего сгорания и ведущими колесами, чтобы изменять степень понижения скорости, причем устройство управления выполнено с возможностью задавать механическую степень сжатия на основе режимов работы двигателя, при этом устройство управления ограничивает диапазон управления механической степени сжатия более узким диапазоном, когда степень понижения скорости является более высокой.
2. Устройство управления для управления двигателем внутреннего сгорания для транспортного средства по п. 1, при этом устройство управления задает верхнее предельное значение диапазона управления механической степени сжатия в более низкое значение, когда степень понижения скорости является более высокой.
3. Устройство управления для управления двигателем внутреннего сгорания для транспортного средства по любому из пп. 1-2, при этом устройство управления уменьшает скорость изменения механической степени сжатия, когда степень понижения скорости является более высокой.
4. Устройство управления для управления двигателем внутреннего сгорания для транспортного средства по любому из пп. 1-2, при этом устройство управления ограничивает диапазон управления механической степени сжатия так, что при той же степени понижения скорости диапазон управления механической степени сжатия является более узким во время движения задним ходом, чем во время движения передним ходом.
5. Способ управления для управления двигателем внутреннего сгорания для транспортного средства, причем двигатель внутреннего сгорания имеет механизм переменной степени сжатия, чтобы изменять механическую степень сжатия, а транспортное средство имеет механизм трансмиссии, расположенный между двигателем внутреннего сгорания и ведущими колесами, чтобы изменять степень понижения скорости, при этом способ управления содержит этапы, на которых:
устанавливают механическую степень сжатия на основе режимов работы двигателя; и
ограничивают диапазон управления механической степени сжатия более узким диапазоном, когда степень понижения скорости является более высокой.
| JP 2005147104 A, 09.06.2005 | |||
| US 6561145 B1, 13.05.2003 | |||
| JP 2010132085 A, 17.06.2010 | |||
| Устройство для разрезания рулонной бумаги | 1961 |
|
SU147480A1 |
| US 20040153234 A1, 05.08.2004. | |||

