Изобретение относится к оптической технике и может быть использовано при проведении монтажной настройки оптических элементов перед предварительной настройкой и автоматизированной юстировкой сложных оптических систем, например, элементов многопроходной многоканальной лазерной установки.
Необходимость настройки и юстировки лазерных систем определяется направленностью лазерного излучения. Сложность настройки возрастает с увеличением количества оптических элементов, с ростом числа каналов и применением многопроходных схем усиления. Дополнительные трудности возникают при объединении каналов в модули с общей накачкой. Одной из задач, стоящей в рассматриваемой области техники, является создание способа монтажной настройки оптических элементов, обеспечивающего точное прохождение лазерных пучков по апертурам оптических элементов.
Известен способ настройки оптических элементов по световому лучу, ось которого проходит через центры диафрагм (Бардин А.Н. Сборка и юстировка оптических приборов. М., «Высшая школа», 1968). Соосно второй диафрагмы выставляется репер. Линзы устанавливают последовательно на оси, проходящей через оптические центры линз, так чтобы луч оставался на центре второй диафрагмы. Можно использовать лазер или визирную трубу, предварительно настроенные на репер. Описанный способ настройки достаточно универсален, но имеет недостаток, заключающийся в том, что поскольку оптические центры линз не точно совпадают с центром апертур, то луч, проходящий через центры диафрагм, может иметь смещения относительно центров апертур линз. Кроме того, для исправления случайного сдвига или при замене элемента схемы нужно снимать все линзы на участке оптической схемы.
Для многопроходных усилительных схем с пространственным разделением, сечения пучков разных проходов совпадают в определенной плоскости в районе усилителя, на линзах пространственных фильтров они имеют плановые относительные смещения. Выражение - «проходит через центр апертуры линзы» в этом случае относится к объединению лазерных лучей всех проходов, независимо от направления распространения.
Рассмотрим способ настройки, который применяется для американской многоканальной лазерной установки NIF [Zacharias, R., et al., "Alignment and wavefront control systems of the National Ignition Facility," Optical Engineering, Vol. 43, pp. 2873-2884, (2004)]. Оптическая система установки NIF включает два усилителя с пространственными фильтрами, соединенных перископом, образованным поляризатором и зеркалом. Первый усилитель с пространственным фильтром снабжен торцевым и кюветным зеркалами, что позволяет осуществить в нем четырехпроходный режим с пространственным разделением. Во втором усилителе с пространственным фильтром реализуется двухпроходный режим. Монтажную настройку всех элементов осуществляют с помощью геодезического прибора, в частности - лазерного трекера. Точность прохождения лазерных пучков по апертурам линз определяется как точностью самой монтажной настройки, так и точностью изготовления пластин активных элементов и линз. Наличие перископа в схеме обеспечивает возможность компенсировать неточности прохождения лазерных пучков по апертурам линз, независимо от их происхождения, однако существуют оптические схемы, где применяется другая расстановка линз и не применяется перископ.
Оптическая схема французской многоканальной лазерной установки LMJ [R.A. Zacharias, N.R. Beer, E.S. Bliss et al. Optical Engineering 43, 12 (2004)] отличается от оптической схемы установки NIF, поэтому по другому складывается ситуация для нее при осуществлении монтажной настройки. Способ монтажной настройки оптических элементов лазерной установок LMJ выбран в качестве наиболее близкого к заявляемому. В оптическую систему лазерной установки LMJ не включен перископ, и четыре линзы пространственных фильтров расположены в одну линию. Полностью четырехпроходный режим усиления реализован за счет применения дополнительной схемы ревесора. Монтажную настройку всех элементов осуществляют также с помощью геодезического прибора. Точность прохождения лазерных пучков по апертурам линз также определяется как точностью самой монтажной настройки, так и точностью изготовления пластин активных элементов и линз. Отсутствие перископа в схеме не позволяет компенсировать эти неточности. Это увеличивает требования к точности монтажной настройки и к точности изготовления оптических элементов.
Этот способ основан на измерении положения оптических меток и включает следующие процессы. Задают геометрическую ось с помощью двух реперов, в соответствии с которой располагают настраиваемые элементы оптической системы и на каждый из них устанавливают оптическую метку, координаты которой относительно центра апертуры настраиваемого элемента выбирают заранее, затем путем продольного и поперечного перемещения каждого настраиваемого элемента относительно геометрической оси осуществляют совмещение центра его апертуры с геометрической осью по положению оптической метки, которое контролируют с помощью регистрирующей аппаратуры, в частности - геодезического прибора, установленного по одну из сторон от геометрической оси, при этом оптическая метка находится в зоне видимости геодезического прибора на оси, не совпадающей с геометрической осью.
Недостатком данного способа является то, что при выставлении на одну ось трех и более линз невозможно корректировать внешними факторами неточность прохождения лазерных пучков по апертурам линз. Коррекция неточности с помощью перемещения линз невозможна входящими в геодезический способ действиями и оборудованием. Данная ситуация связана с тем, что при наличии децентровки линз и клиновидности активных элементов световой луч, который должен проходить через центры апертур линз, расположенных в одну линию, имеет изломы, а геодезический способ монтажной настройки нацелен на выставление элементов на геометрическую прямую, и не может обеспечить расстановку элементов на определенную ломаную. При таком способе настройки световой луч не проходит через центры апертур всех настраиваемых элементов, что приводит к ухудшению качества пучка, потерям энергии и дифракции на краях оптических элементов, которая может привести к их разрушению. Кроме того, такой способ настройки приводит к повышенным требованиям при изготовлении оптических элементов, по точности контроля с помощью геодезического прибора.
Техническим результатом заявляемого изобретения является повышение точности настройки.
Указанный технический результат достигается за счет того, что в способе монтажной настройки элементов оптической системы, заключающемся в том, что путем перемещения настраиваемых элементов устанавливают их в соответствии с заданной геометрической осью и заданными расстояниями между элементами оптической системы, новым является то, что осуществляют дополнительную настройку элементов путем их перемещения относительно геометрической оси в поперечном направлении, для чего устанавливают две пары оптических меток так, чтобы для каждой пары середина отрезка, соединяющего оптические метки, находилась на геометрической оси, при этом одну из этих пар принимают за базовую, а другую за вспомогательную, также на каждый настраиваемый элемент устанавливают по паре оптических меток так, чтобы середина отрезка, соединяющего эту пару, совпадала с центром апертуры настраиваемого элемента, причем все пары оптических меток устанавливают с угловым или радиальным смещением относительно друг друга, далее по изображениям пар оптических меток, сформированным с помощью регистрирующей аппаратуры, объектив которой устанавливают по геометрической оси или оптически сопряженной с ней, определяют расхождение Δ0 между положениями середин отрезков, соединяющих оптические метки вспомогательной и базовой пар, также определяют расхождения Δ1…ΔN между положениями середин отрезков, соединяющих пары оптических меток, установленных на настраиваемых элементах, относительно середины отрезка, соединяющего оптические метки базовой пары, после чего вычисляют величины смещений T1…TN настраиваемых элементов по следующим зависимостям:
T1=K1,0 Δ0+K1,1 Δ1+K1,2 Δ2+…+K1,N ΔN
T2=K2,0 Δ0+K2,1 Δ1+K2,2 Δ2+…+K2,N ΔN
…………………………………………
TN=KN,0 Δ0+KN,1 Δ1+KN,2 Δ2+…+KN,N ΔN,
где:
1…N - соответствующие настраиваемые элементы;
К - матрица перехода от вектора Δ к вектору Т;
K1,0…KN,N - элементы матрицы перехода K, которые вычисляют, исходя из фокусных расстояний линз и расстояний между элементами оптической системы с использованием формулы тонкой линзы.
Применение «маркерного» метода для дополнительной настройки элементов путем их перемещения в поперечном направлении позволяет устранить неточность расстановки настраиваемых элементов в соответствии с геометрической осью, которое производили на предыдущем этапе настройки, что позволяет снизить требования к точности изготовления линз и жесткости контроля предыдущего этапа настройки. Расстановку элементов оптической системы на предыдущем этапе настройки можно проводить либо геодезическим способом, как в наиболее близком аналоге, и контролировать по положению оптической метки с помощью регистрирующей аппаратуры, либо по лазерному лучу, либо еще каким способом, в любом случае заявляемый способ позволяет устранить неточности настройки, независимо от применяемого метода расстановки.
Размещение объектива регистрирующей аппаратуры на геометрической оси или на оси, оптически сопряженной с ней, и установка двух пар оптических меток так, чтобы середина отрезка, соединяющего пару, находилась на геометрической оси, а также установка на каждый настраиваемый элемент, по крайней мере, по паре оптических меток так, чтобы середина отрезка, соединяющего пару, совпала с центром апертуры настраиваемого элемента, связано с необходимостью контроля положений оптических меток, установленных на настраиваемых элементах, по геометрической оси через настраиваемые элементы, что устраняет влияние неточности их изготовления и снижает жесткость требований по точности настройки, осуществляемой на предыдущем этапе, что в конечном итоге повышает точность прохождения лазерного пучка по апертурам оптических элементов.
Размещение всех пар меток с угловым смещением относительно друг друга необходимо для того, чтобы все оптические метки, не перекрывая друг друга, были видны в зоне наблюдения регистрирующей аппаратуры.
Выбор в качестве базовой метки середины отрезка, соединяющего пару оптических меток, которая находится на геометрической оси, и определение расхождения Δ0 между положениями середин отрезков, соединяющих оптические метки базовой и вспомогательной пар, а также расхождений Δ1…ΔN между положениями середин отрезков, соединяющих пары оптических меток, установленных на настраиваемых элементах, относительно середины отрезка, соединяющего оптические метки базовой пары, позволяет с высокой точностью вычислить, на сколько необходимо переместить в поперечном направлении каждый настраиваемый элемент, чтобы световой луч, проходящий через базовую и вспомогательную пары оптических меток, проходил через центры апертур всех настраиваемых элементов. Такой метод позволяет при прохождении пучка уменьшить дифракцию на краях настраиваемых элементов, настроить оптические элементы с высокой точностью, снизить потери энергии пучка, повысить его качество.
Соотношения, приведенные выше, по которым вычисляют величины смещений T1…TN настраиваемых элементов, получены в предположении линейной зависимости расхождений Δ от смещения линз и аддитивности вклада отдельных линз, что упрощает вычисление величин смещений T1…TN.
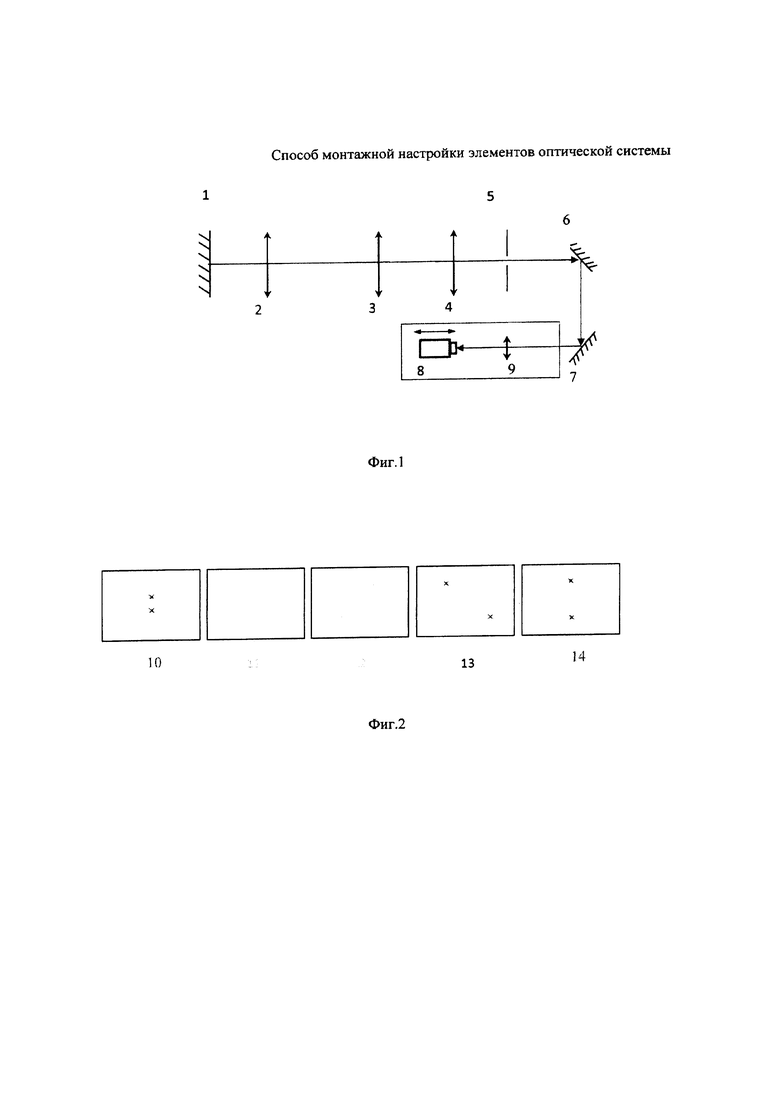
На фиг. 1 представлена оптическая схема участка стенда для отработки юстировки лазерной установки;
на фиг. 2 - изображения пар оптических меток, зарегистрированные камерой.
В качестве примера конкретного выполнения, поясняющего заявляемое изобретение, может служить оптическая схема стенда для отработки юстировки многоканального неодимового лазера. Схема включает юстировочный лазер (не показан), торцевое зеркало 1, три линзы 2, 3, 4, основания которых снабжены трансляторами для поперечного перемещения, диафрагменная пластина пространственного фильтра 5, два зеркала 6.7, заводящие излучение в регистрирующую аппаратуру, в качестве которой используют цифровую камеру 8 с объективом 9 (фиг. 1). Цифровая камера установлена на линейном моторизованном трансляторе, позволяющем осуществлять ее перемещение в продольном направлении и последовательно настраивать камеру на оптические элементы схемы (фиг. 1). Все линзы имеют фокусные расстояния F=14270 мм. Расстояния между торцевым зеркалом, линзами и диафрагмой составляют 14090 мм, 28540 мм, 19800 мм, 14270 мм соответственно. В качестве объектива выбрана линза с фокусным расстоянием f=202,6 мм. Расстояние от диафрагменной пластины до объектива составляет 688 мм. Цифровая камера имеет разрешение 1280×1024 пикселей. Размер пикселя составляет 6,7 мкм. В качестве регистрирующий аппаратуры также может быть применен геодезический прибор (теодолит), трехосевая цифровая визирная труба и т.д. Для осуществления дополнительной настройки применяют оптические метки, в качестве которых используют лазерные диоды инфракрасного диапазона с длиной волны, близкой к длине волны рабочего излучения.
На начальном этапе настройки задают геометрическую ось с помощью торцевого зеркала 1 и диафрагмы 5, после чего пропускают излучение юстировочного лазера через середину торцевого зеркала 3 и диафрагму 5. Последовательно устанавливают линзы 2, 3, 4 так, чтобы луч юстировочного лазера проходил через диафрагму 5. В результате настройки оптические центры линз оказываются на геометрической оси. Начальный этап настройки может быть осуществлен, как и в ближайшем аналоге с помощью геодезического прибора, в качестве которого используют, например, лазерный трекер. Для этого устанавливают на каждый элемент схемы оптическую метку - уголковый отражатель, координаты установки которого относительно центра апертуры элемента были определены заранее. Затем путем продольного и поперечного перемещения каждого элемента относительно геометрической оси осуществляют совмещение центра его апертуры с геометрической осью по положению уголкового отражателя, которое определяют с помощью лазерного трекера. В этом случае на геометрической оси оказываются центры апертур настраиваемых элементов.
Неточность настройки начального этапа, независимо от применяемого метода, и неточность изготовления настраиваемых элементов приводит к тому, что рабочее излучение не проходит по центрам апертур элементов оптической схемы.
Далее осуществляют дополнительную настройку. Для чего зеркалами 5 и 6 луч юстировочного лазера заводят на камеру 8 так, чтобы ось транслятора была параллельна лучу, после чего устанавливают объектив 9, тем самым осуществляют сопряжение геометрической оси с осью камеры 8 и объектива 9. На торцевое зеркало 1 и диафрагменную пластину 5 устанавливают по паре лазерных диодов, при этом середины соединяющих их отрезков находятся на геометрической оси. Пару лазерных диодов, установленных на диафрагменной пластине 5, принимают за базовую пару меток. Диоды, установленные на торцевом зеркале 1, принимают за вспомогательную пару меток. На каждую линзу 2, 3, 4 устанавливают по паре лазерных диодов таким образом, чтобы середины отрезков, соединяющих пары, совпали с центрами их апертур. Все оптические метки, не перекрывая друг друга, должны быть видны в зоне наблюдения регистрирующей аппаратуры, для чего их устанавливают с угловым или радиальным смещением относительно друг друга. Подвижки линз имеют лимбы с ценой деления 1 мм и возможность перемещения вправо и влево примерно на 15 см. Следует отметить, что подвижки не являются микрометрическими и, кроме того, имеют небольшой люфт червячного механизма, поэтому точность перемещения линзы составляет ~0,3 мм. Последовательно получают изображения пар лазерных диодов 10-14, показанные на фиг. 2. Определяют координаты положения на матрице S0 и SB центров отрезков, соединяющих изображения вспомогательной и базовой пар лазерных диодов, также определяют координаты положения на матрице S1, S2, S3 середин отрезков, соединяющих изображения пар оптических лазерных диодов, установленных на линзах. В расчетах используют только Δ0, Δ1, Δ2, Δ3 - разницы величин S0, S1, S2, S3 и SB. Элементы матрицы перехода K1,0 K2,0 K3,0 K1,1 K2,1 K3,1 K1,2 K2,2 K3,2 K1,3 K2,3 K3,3 вычисляют исходя из фокусных расстояний линз и расстояний между элементами оптической системы с использованием формулы тонкой линзы и метода обратной матрицы. Величины поперечных смещений линз вычисляют по следующим формулам:
T1=-0,39 Δ0+0,10 Δ1+0,20 Δ2+0,09 Δ3
Т2=-0,21 Δ0-0,22 Δ1+0,15 Δ2+0,27 Δ3
Т3=-0,09 Δ0-0,09 Δ1+0,26 Δ2-0,09 Δ3
Проверка работоспособности формул проводилась следующим образом. Линзы 2, 3, 4 сдвигались на известное расстояние в поперечном направлении. Измерялись координаты середины отрезков, соединяющих пары лазерных диодов на торцевом зеркале 1, линзах 2, 3, 4 и диафрагменной пластине 5. Вычислялись перемещения линз, требуемые для восстановления точной настройки. Результаты серии измерений для третьей линзы отражены в таблице 1. В столбцах 2-4 приводятся изменения положения линз, которые осуществляют вручную кареткой подставки по шкале. В столбцах 5-9 приводятся измеренные координаты середин пар лазерных диодов. В столбцах 10-12 вычисленные смещения линз. Ошибкой совмещения назовем разницу между тем, что получено в вычислениях, и тем, как на самом деле сдвинута линза.
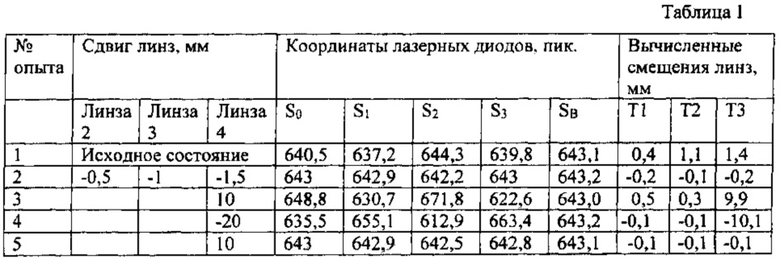
Полученная точность корректировки в первой итерации говорит о том, что ошибки выведенных формул не обнаружены, так как точность поперечного выставления линз по шкале с миллиметровыми делениями не превышает 0,3.
В реальной установке монтажная настройка линз будет осуществляться механически без шкал, а вычисление ошибки будет происходить непрерывно.
Для исправления случайного сдвига или при замене элемента оптической системы нужно повторить измерения и произвести подстройку всех линз.
Мы рассмотрели случай, когда настраиваемые элементы оптической системы расположены между парами оптических меток, у которых середины отрезков их соединяющих лежат на геометрической оси. Аналогично решается задача настройки, если они расположены в произвольных местах относительно настраиваемых элементов системы, при этом все элементы системы должны находятся в зоне видимости регистрирующей аппаратуры.
Для линз, имеющих разные фокусные расстояния и другие расстояния между элементами, в формулах будут использованы другие коэффициенты K1,0…KN,N.
Заявляемый способ настройки позволяет настроить линзы таким образом, чтобы лазерный пучок проходил соосно их апертурам, независимо от точности изготовления линз (в плане центровки). Заявляемый способ позволяет понизить требования к точности настройки, осуществляемой на предыдущем этапе, понизить требования к точности центровки линз, позволяет уменьшить степень виньетирования рабочих пучков на апертурах и диафрагмах и тем самым уменьшить искажения амплитудного профиля рабочего пучка.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ СИСТЕМЫ ТРАНСПОРТНЫХ ЗЕРКАЛ ЛАЗЕРНОЙ УСТАНОВКИ | 2024 |
|
RU2839289C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕЛИНЕЙНО-ОПТИЧЕСКИХ СВОЙСТВ ВЕЩЕСТВ И МАТЕРИАЛОВ МЕТОДОМ Z-СКАНИРОВАНИЯ ПРИ МОНОХРОМАТИЧЕСКОЙ ЛАЗЕРНОЙ НАКАЧКЕ | 2016 |
|
RU2626060C1 |
| СПОСОБ НАВЕДЕНИЯ ЧАСТОТНО ПРЕОБРАЗОВАННОГО ИЗЛУЧЕНИЯ КАНАЛА ЛАЗЕРНОЙ УСТАНОВКИ НА МИШЕНЬ | 2021 |
|
RU2758944C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЮСТИРОВОЧНОГО НАСТРОЕЧНОГО ИЗЛУЧЕНИЯ ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНЫХ ПУЧКОВ НА МИШЕНЬ | 2024 |
|
RU2828645C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ МНОГОКАНАЛЬНОГО ЛАЗЕРА В ЗАДАННЫЕ ТОЧКИ МИШЕНИ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601505C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ДЕТЕКТИРОВАНИЯ БЫСТРОДВИЖУЩИХСЯ ЗАЩИТНЫХ МЕТОК, СОДЕРЖАЩИХ МИКРОКРИСТАЛЛЫ АЛМАЗА С АКТИВНЫМИ NV-ЦЕНТРАМИ | 2014 |
|
RU2566600C1 |
| Оптическая система формирования и наведения лазерного излучения | 2016 |
|
RU2663121C1 |
| СПОСОБ НАВЕДЕНИЯ И ФОКУСИРОВКИ ИЗЛУЧЕНИЯ НА МИШЕНЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2726219C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОГИБОВ БАЛОК | 2013 |
|
RU2533343C1 |
| Лазерный теодолит | 1989 |
|
SU1670415A1 |
Способ монтажной настройки элементов оптической системы содержит два этапа. Сначала путем перемещения настраиваемых элементов устанавливают их в соответствии с заданной геометрической осью и заданными расстояниями между элементами оптической системы. Далее устраняют погрешности настройки этого этапа путем перемещения настраиваемых элементов относительно геометрической оси в поперечном направлении. Для этого используют пары меток, на основании которых определяют рассогласование положений настраиваемых элементов. При этом все пары оптических меток устанавливают с угловым или радиальным смещением относительно друг друга. Техническим результатом заявляемого изобретения является повышение точности настройки. 2 ил., 1 табл.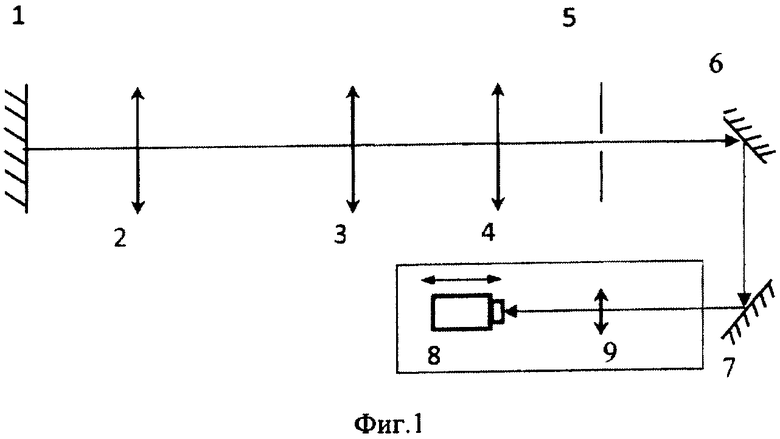
Способ монтажной настройки элементов оптической системы, заключающийся в том, что путем перемещения настраиваемых элементов устанавливают их в соответствии с заданной геометрической осью и заданными расстояниями между элементами оптической системы, отличающийся тем, что осуществляют дополнительную настройку элементов путем их перемещения относительно геометрической оси в поперечном направлении, для чего устанавливают две пары оптических меток так, чтобы для каждой пары середина отрезка, соединяющего оптические метки, находилась на геометрической оси, при этом одну из этих пар принимают за базовую, а другую за вспомогательную, также на каждый настраиваемый элемент устанавливают по паре оптических меток так, чтобы середина отрезка, соединяющего эту пару, совпадала с центром апертуры настраиваемого элемента, причем все пары оптических меток устанавливают с угловым или радиальным смещением относительно друг друга, далее по изображениям пар оптических меток, сформированным с помощью регистрирующей аппаратуры, объектив которой устанавливают по геометрической оси или оптически сопряженной с ней, определяют расхождение Δ0 между положениями середин отрезков, соединяющих оптические метки вспомогательной и базовой пар, также определяют расхождения Δ1…ΔN между положениями середин отрезков, соединяющих пары оптических меток, установленных на настраиваемых элементах, относительно середины отрезка, соединяющего оптические метки базовой пары, после чего вычисляют величины смещений T1…TN настраиваемых элементов по следующим зависимостям:
T1=K1,0Δ0+K1,1Δ1+K1,2Δ2+…+K1,NΔN
Т2=K2,0Δ0+K2,1Δ1+K2,2Δ2+…+K2,NΔN
……………………………………………
TN=KN,0Δ0+KN,1Δ1+KN,2Δ2+…+KN,NΔN,
где:
1…N - соответствующие настраиваемые элементы;
К - матрица перехода от вектора Δ к вектору Т;
K1,0…KN,N - элементы матрицы перехода K, которые вычисляют исходя из фокусных расстояний линз и расстояний между элементами оптической системы.
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ЮСТИРОВКИ ОПТИЧЕСКОЙ СИСТЕМЫ С ПОМОЩЬЮ МАРКЕРОВ | 2014 |
|
RU2566367C1 |
| US 4130361 A1, 19.12.1978 | |||
| US 6850372 B1, 01.02.2005 | |||
| УСТРОЙСТВО ЮСТИРОВКИ ДВУХЗЕРКАЛЬНОЙ ЦЕНТРИРОВАННОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2011 |
|
RU2467286C1 |

