Изобретение относится к измерительной технике и может быть использовано для распределенного измерения параметров вибрационных или акустических сигналов вдоль протяженных объектов.
Известно о применении волоконно-оптических датчиков для распределенного измерения величины вибрационных или акустических воздействий, основанном на использовании эффектов релеевского рассеяния или рассеяния Мандельштама-Бриллюэна. Основное преимущество в построении измерительных систем с использованием оптического волокна в качестве сенсора заключается в их простоте и масштабируемости. Так, например, с помощью одного измерителя можно охватить объект протяженностью от сотен метров до десятков километров.
Известен патент RU 139468 U1, в котором описана оценка мгновенных значений измеряемого фазового набега между элементами разрешения без использования в приемном тракте интерферометра Майкельсона. Однако есть существенный недостаток, обусловленный тем, что, если рабочая точка модуляционной характеристики соответствующего канала дальности находится вблизи точки экстремума, в окрестности которой функция не является взаимно-однозначной, то для оценки информационного параметра - мгновенного значения измеряемого фазового набега между элементами разрешения, требуются априорные сведения о модели процесса воздействия, что существенным образом сужает класс оцениваемых и распознаваемых воздействий.
Известно устройство, лишенное всех описанных выше недостатков, однако в реализуемой посредством него оценки параметров ширина полосы восстанавливаемых сигналов ограничена 1/3 частоты Найквиста, см. статью «А.Е. Alekseev, V.S. Vdovenko, B.G. Gorshkov, V.T. Potapov, D.E. Simikin, A phase-sensitive optical time-domain reflectometer with dual-pulse phase modulated probe signal, Laser Phys. 24 (2014) 115106 (5pp)».
Необходимо также отметить одну общую негативную особенность для всех когерентных рефлектометров, использующих в качестве распределенного чувствительного элемента одномодовое оптическое волокно - наличие каналов дальности, в которых чувствительность к внешним воздействия мала или равна нулю. Этот эффект можно численно охарактеризовать таким параметром, как видность интерференционной картины. Его величина зависит от ряда факторов:
- наличия поляризационно-модовой дисперсии (ПМД) в оптическом волокне. Для типовых одномодовых телекоммуникационных оптических волокон значения параметра Dp, характеризующего ПМД, лежат в диапазоне от 0.01 до 0.1 пс/√км (за исключением волокон, сохраняющих состояние поляризации). Такие значения Dp определяют характерную длину поляризационных биений в диапазоне от единиц до десятков метров [Fiber-optic Communications Systems, Third Edition. Govind P. Agrawal, p 43-45], в совокупности с высокой степенью поляризованности лазерного излучения генератора зондирующего сигнала это приводит к разрушению профиля поляризации зондирующего сигнала, что, в свою очередь, уменьшает видность интерференционной картины.
- наличия точек экстремума у функции модуляционной характеристики канала дальности. При нахождении рабочей точки канала дальности в окрестности точки экстремума значение параметра видности интерференционной картины также падает [Sergey V. Shatalin, Vladimir N. Treschikov, and Alan J. Rogers, Interferometric optical time-domain reflectometry for distributed optical-fiber sensing, APPLIED OPTICS Vol. 37, No. 2 24 20 August 1998].
Из патента RU 2271446 C1 известны способ и устройство для мониторинга виброакустической характеристики протяженного объекта, в схему которого входит кольцевой волоконный лазер, работающий в режиме модуляции добротности резонатора. Описанное в данном патенте устройство чрезвычайно чувствительно к внешним вибрационным и температурным воздействиям, которые приводят к колебаниям оптической длины резонатора лазера, которые вносят фазовый и частотный шум в зондирующий сигнал, а это, в свою очередь, приводит к ухудшению отношения сигнал/шум. Кроме того, описанные в данном патенте средства не позволяет создавать зондирующие пачки импульсов с заданным фазовым и спектральным портретом, что позволило бы применить методы оценки изменений мгновенных значений фазового набега между центрами релеевского рассеяния в оптическом волокне, обусловленных внешним давлением, деформацией или температурными изменениями, что связано с нелинейным характером воздействия фазового набега на амплитуду релеевского рассеяния, наблюдаемого на фотоприемнике.
Этими же недостатками обладает и способ мониторинга виброакустических колебаний вдоль протяженного объекта на основе устройства, содержащего узкополосный импульсный источник излучения в виде полупроводникового лазера и оптического модулятора, чувствительный элемент в виде оптического волокна, расположенного продольно внутри или снаружи протяженного объекта, узел ввода оптического излучения в чувствительный элемент, фотоприемник и узел обработки сигнала с процессором, см. US 5194847 А.
Отмеченные выше недостатки устранены в известном способе, при реализации которого осуществляется быстрое измерение величины возмущений в передаваемом, отраженном или рассеянном свете вдоль оптического волокна, что позволяет осуществлять моноимпульсную оценку мгновенных значений измеряемого фазового набега между элементами разрешения, см. заявку WO 2010/136810 А1. Однако, использование в приемном тракте интерферометра Майкельсона, организованного на базе оптического направленного ответвителя 3/3 или 4/4, накладывает жесткие требования на термостабилизацию и виброизоляцию приемного тракта. Кроме того, требуется использование специального ответвителя для внесения разного фазового набега в оптический сигнал, распространяющегося в разных плечах интерферометра, что существенно усложняет и удорожает схему, а разделение сигнала снижает рабочую дальность прибора и требует использовать оптический предусилитель, что снижает отношение сигнал/шум на входе фотоприемника. Кроме того, необходимы выравнивание и стабилизация чувствительности фотоприемников приемного тракта для того, чтобы избежать вносимых помех, обусловленных расбалансировкой приемных каналов приемного тракта.
Техническим результатом изобретения является повышение точности воспроизведения мгновенных значений фазового набега между центрами релеевского рассеяния в оптическом волокне и улучшение возможностей по оценке быстро меняющихся параметров вибрационных и акустических сигналов, повышение надежности обнаружения слабых воздействий и их сопровождения в случае их перемещения вдоль датчика, расширение класса оцениваемых и распознаваемых воздействий.
Указанный технический результат достигается за счет того, что в предлагаемом способе для оценки вибрационных или акустических сигналов вдоль протяженных объектов используются источник когерентного излучения - полупроводниковый лазер с распределенной обратной связью, чувствительный элемент в виде оптического волокна, приемный тракт, сигнальный тракт, при этом ввод зондирующего сигнала в оптическое волокно, развязка зондирующего сигнала и обратнорассеянного релеевского излучения осуществляется при помощи оптического циркулятора, зондирующий сигнал формируют в виде последовательности пачек импульсов при помощи фазового модулятора, поляризационного переключателя и амплитудного модулятора, определяют информационную составляющую оценки вибрационного или акустического сигнала в виде мгновенного значения фазового набега между центрами релеевского рассеяния в оптическом волокне - φk, используя формулу Ik=А2+В2-2 A⋅Bcos(φk+π⋅k/2), характеризующую зависимость мгновенных значений фазового набега φk между центрами релеевского рассеяния в наблюдаемом канале дальности и отсчетов рефлектограммы от номера зондирующей пачки импульсов для любого выбранного канала дальности, где k - номер зондирующей пачки импульсов, Ik - отсчеты рефлектограммы в выбранном канале дальности, А и В - интенсивности рассеянного поля от первого и второго импульса в зондирующей пачке в заданном канале дальности, причем отсчеты Ik разделяют на два параллельных потока обработки - на два независимых цифровых тракта, где один тракт обрабатывает нечетные элементы входной последовательности, а другой - четные, причем в тракте, который обрабатывает нечетные элементы входной последовательности, формируют аппроксимированную синусную квадратуру сигнала по формуле Sk=-2⋅A⋅B⋅sin(φk), а в тракте, который обрабатывает четные элементы входной последовательности, формируют аппроксимированную косинусную квадратуру сигнала по формуле Ck=-2⋅А⋅В⋅cos(φk), а после объединения в обоих трактах обработки посредством квадратурного фазового детектора выделяют информационную составляющую в виде мгновенных значений фазового набега между центрами релеевского рассеяния в оптическом волокне - φk. Приемный тракт может быть выполнен из приемника оптического излучения и аналого-цифрового преобразователя, или из двухплечевого интерферометра Майкельсона, созданного на базе симметричного оптоволоконного разветвителя, двух фарадеевских зеркал, линии задержки, которую выполняют в виде фрагмента волокна, причем, для осуществления развязки оптического сигнала между фарадеевскими зеркалами применяют дополнительный циркулятор, а сигнальный тракт может содержать двухплечевой интерферометр Майкельсона, выполненный на базе симметричного оптоволоконного разветвителя, фарадеевского зеркала, обычного зеркала, линии задержки, отвечающей за подвижку компонент зондирующего сигнала с ортогональной поляризацией относительно друг друга. Предпочтительно после формирования зондирующего сигнала производить его усиление.
Изобретение поясняется с помощью графических материалов, где:
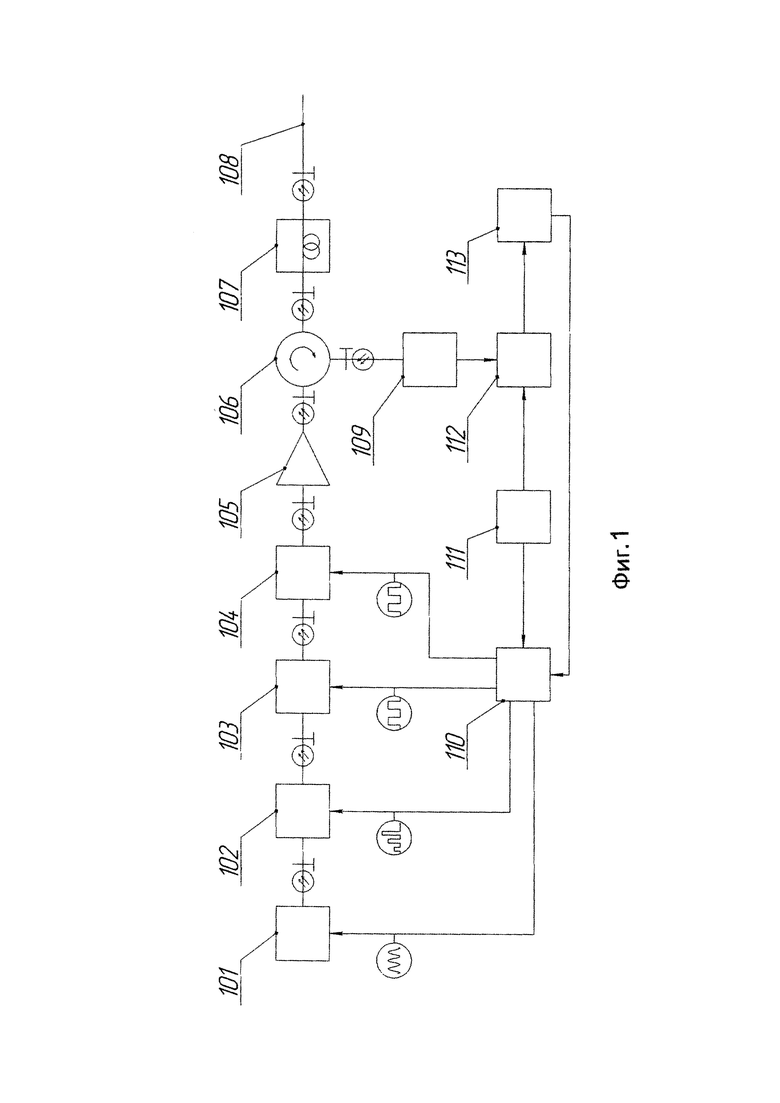
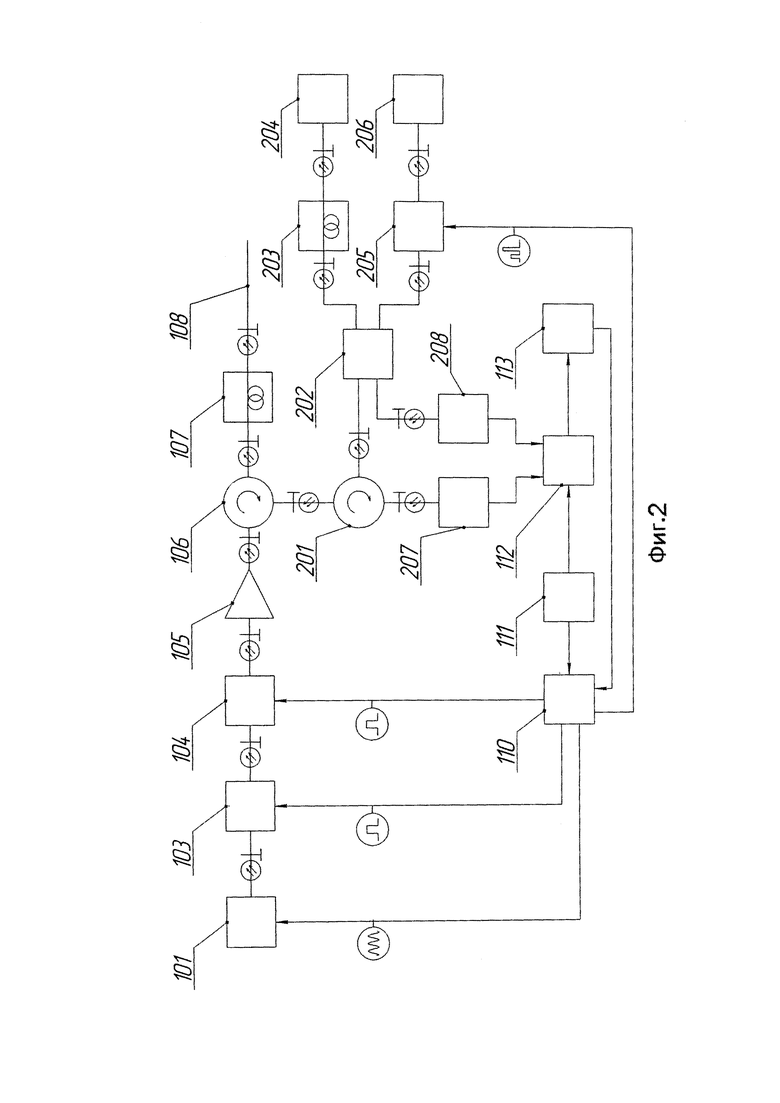
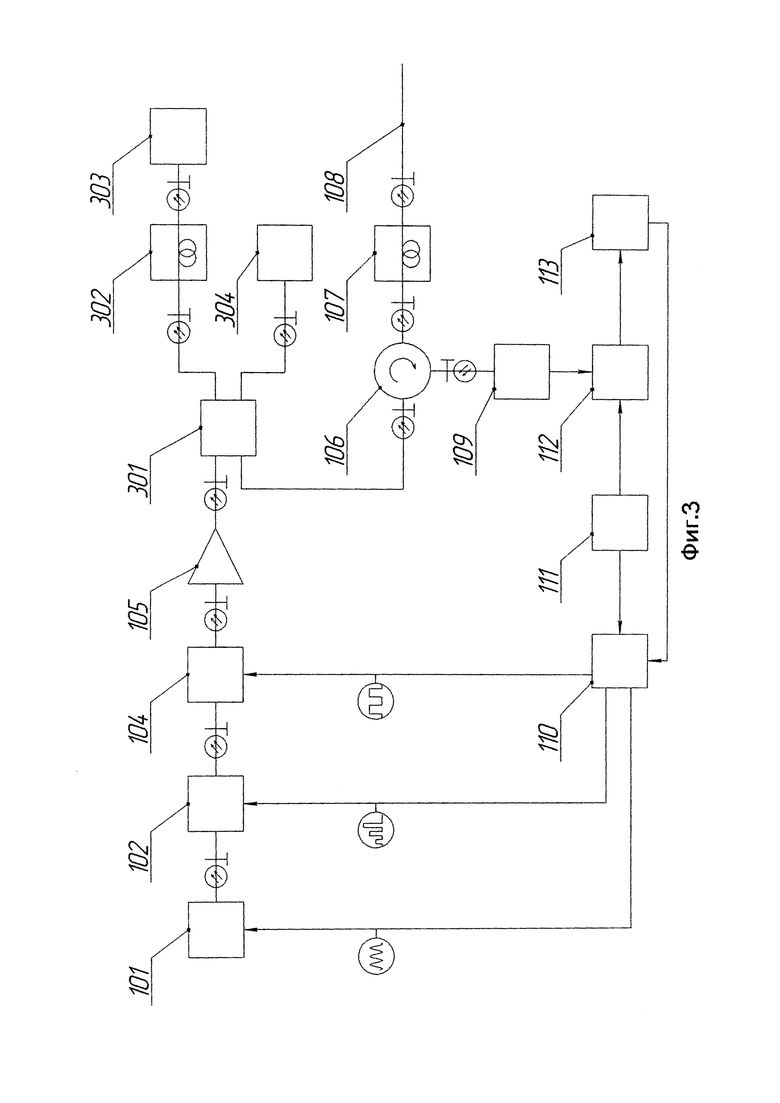
- на Фиг. 1 - Фиг. 3 представлены принципиальные схемы устройств, направленных на реализацию заявленного способа.
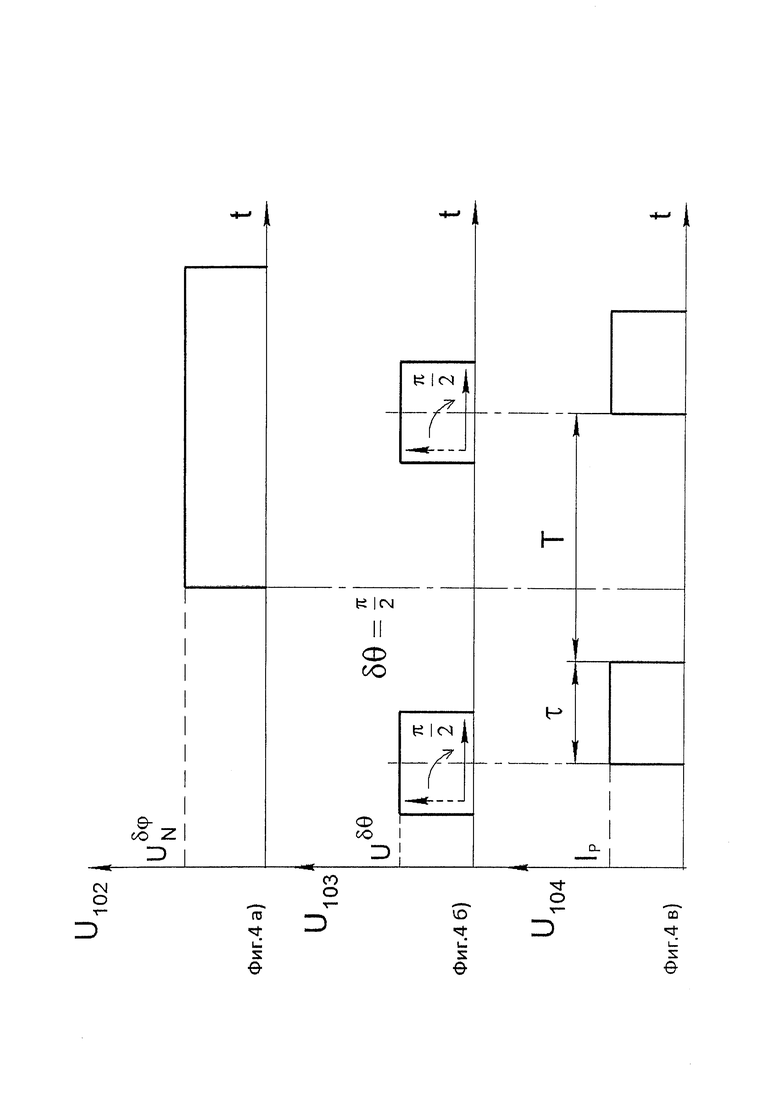
На Фиг. 4а, фиг. 4б, фиг. 4в показаны отображения сигналов управления элементами устройства, отвечающими за формирование и модуляцию зондирующего сигнала, причем на Фиг. 4а показана временная зависимость напряжения на фазовом модуляторе, в соответствии с которой создается относительный фазовый сдвиг между импульсами в пачке зондирующего сигнала, на Фиг. 4б - временная зависимость напряжения на поляризационном переключателе, в соответствии с которой модулируется состояние поляризации зондирующего сигнала, на Фиг. 4в - временная зависимость силы тока на амплитудном модуляторе, в соответствии с которой формируется амплитуда зондирующего сигнала, где τ - длина импульса в пачке, Т - расстояние между импульсами в пачке.
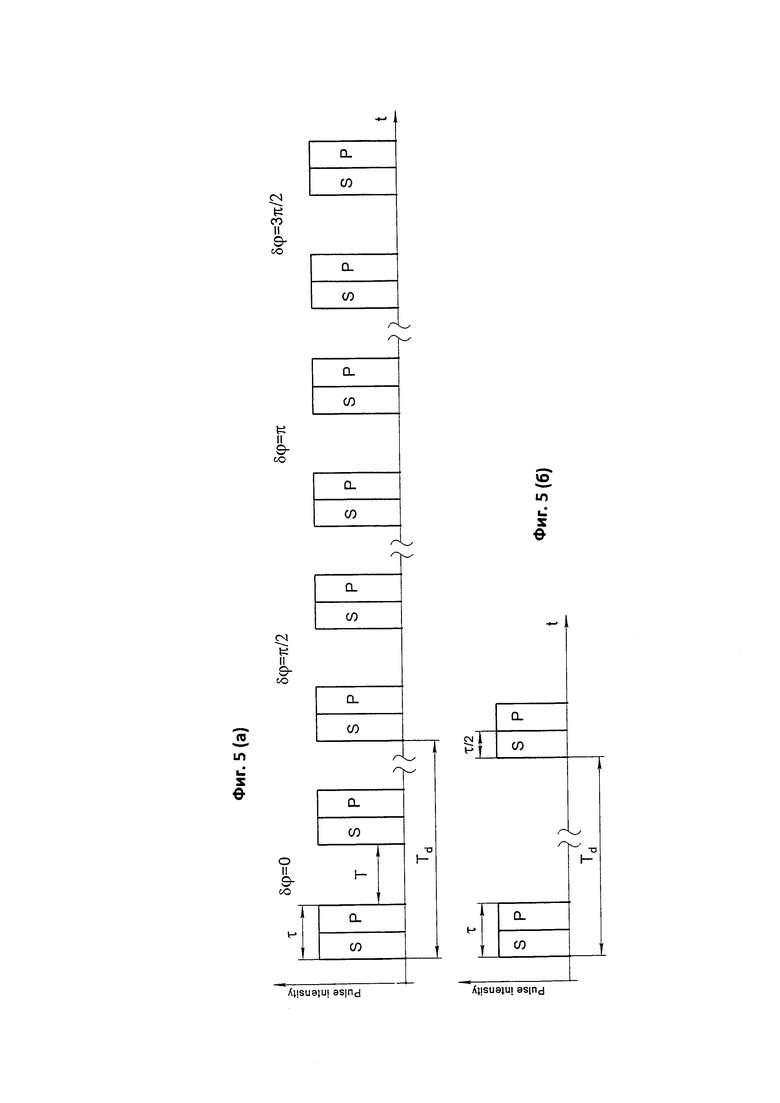
На Фиг. 5а и фиг. 5б отображена структура зондирующего сигнала, где τ - длина импульса, Т - расстояние между импульсами, S и Р - ортогональные состояния поляризации, Td - период посылки зондирующего сигнала, δϕ - относительная разность фаз между импульсами в зондирующей пачке.
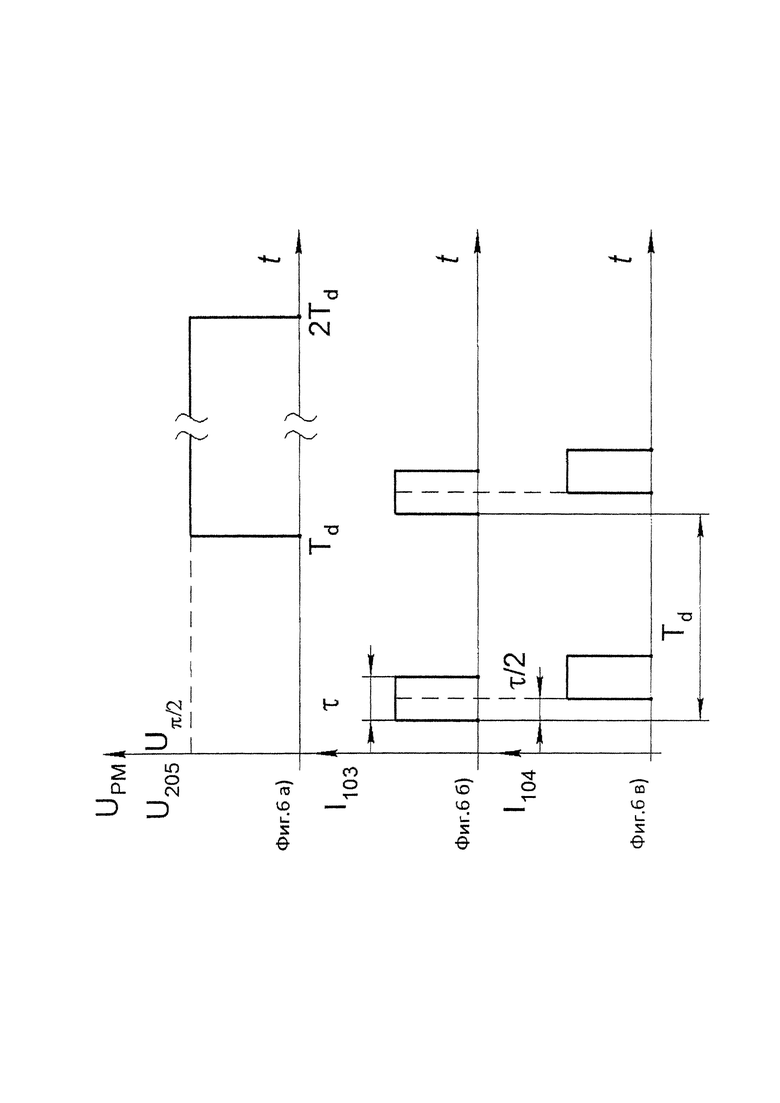
На Фиг. 6а, Фиг. 6б и на Фиг. 6в отображены сигналы управления элементами устройств, отвечающими за формирование и модуляцию зондирующего сигнала. На Фиг. 6а показана временная зависимость напряжения на фазовом модуляторе, в соответствии с которой создается относительный фазовый сдвиг между обратнорассеянным релеевским излучением, проходящим по разным плечам интерферометра. На Фиг. 6б показана временная зависимость напряжения на поляризационном переключателе, в соответствии с которой модулируется состояние поляризации зондирующего сигнала. На Фиг. 7в показана временная зависимость силы тока на амплитудном модуляторе, в соответствии с которой формируется амплитуда зондирующего сигнала.
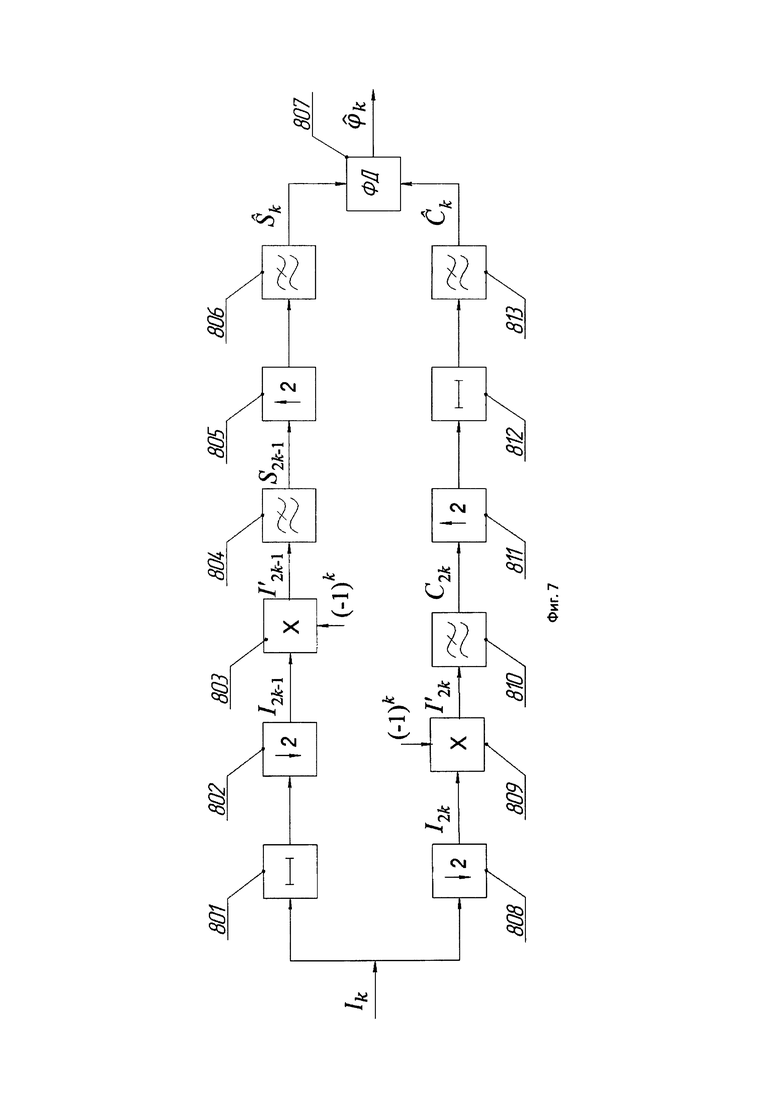
На Фиг. 7 отображена структура схемы цифровой обработки сигнала для схем устройств, показанных на Фиг. 1 и на Фиг. 3.
В схеме, показанной на Фиг. 7, используются следующие элементы:
- цифровая задержка на один такт - 701, 712;
- блок понижающей дискретизации в 2 раза - 702, 708;
- блок повышающей дискретизации в 2 раза - 705, 711;
- фильтр нижних частот - 704, 706, 710, 713;
- знакопеременный модулятор цифрового сигнала - 703, 709;
- цифровой квадратурный фазовый детектор - 707.
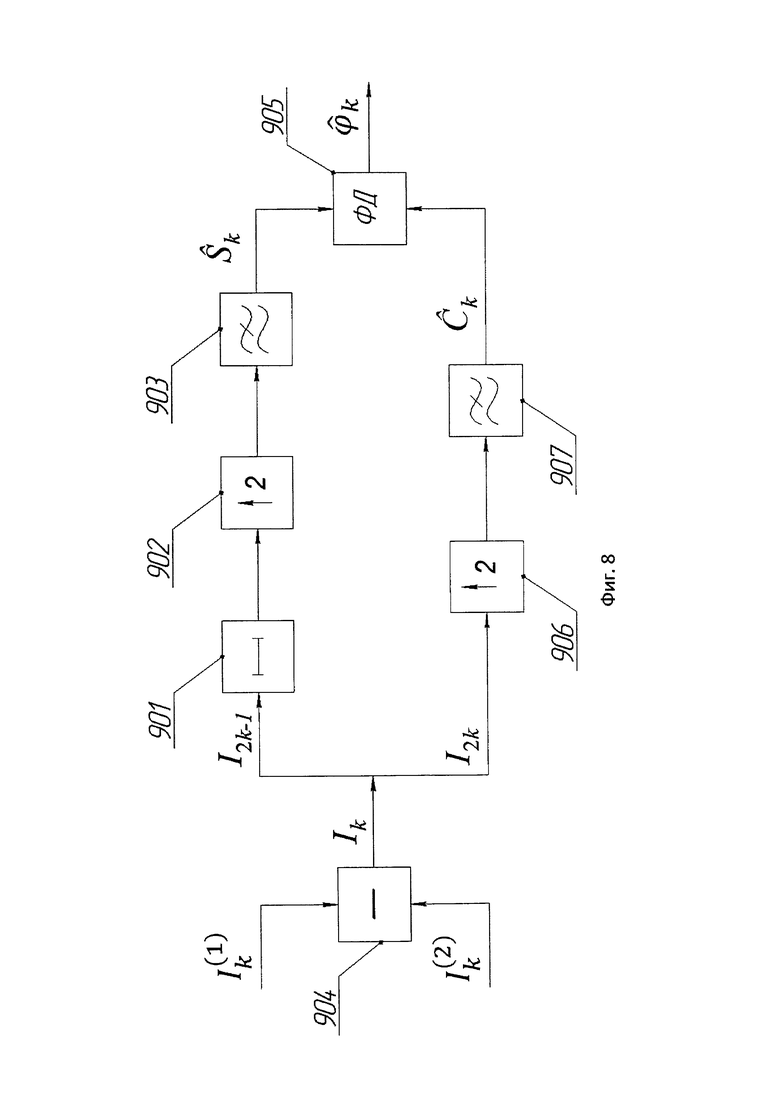
На Фиг. 8 отображена структура схемы цифровой обработки сигнала для устройства, показанного на Фиг. 2.
В схеме, отображенной на Фиг. 8, используются следующие элементы:
- цифровая задержка на один такт - 801;
- блок повышающей дискретизации в 2 раза - 802, 806;
- фильтр нижних частот - 803, 807;
- блок вычитания сигналов - 804;
- цифровой квадратурный фазовый детектор - 805.
Возможность осуществления предлагаемого способа поясняется следующим образом.
Пример 1
На Фиг. 1 схематично представлено устройство, элементы схемы которого пронумерованы индексом 100. В качестве источника постоянного лазерного излучения используется полупроводниковый лазер 101 с распределенной обратной связью. При помощи фазового модулятора 102, поляризационного переключателя 103 и амплитудного модулятора 104 происходит формирование зондирующего сигнала. На Фиг. 5а отображен механизм формирования фазовой задержки между оптическими импульсами с использованием поляризационного переключателя 103, на Фиг. 5б отображен механизм формирования профиля поляризации зондирующего сигнала, что позволяет компенсировать эффекты, связанные с ПМД. Фиг. 5в отображает процесс амплитудной модуляции посредством амплитудного модулятора 104. После модуляции и формирования зондирующий сигнал усиливается до необходимого уровня в волоконном усилителе 105. С помощью оптического циркулятора 106 осуществляется развязка зондирующего сигнала и обратнорассеянного релеевского излучения между оптическим волокном 108 и приемным трактом. В данном Примере приемный тракт состоит из приемника оптического излучения 109 и аналого-цифрового преобразователя 112. Термостабилизированный и виброизолированный фрагмент 107 оптического волокна 108 позволяет оценивать медленные флуктуации центральной частоты излучения полупроводникового лазера 101. Сигналы управления для фазового модулятора 102, поляризационного переключателя 103, амплитудного модулятора 104 и коррекции флуктуаций центральной частоты излучения для полупроводникового лазера 101 формируются узлом управления 110. Импульсы синхронизации и частота тактирования генерируются узлом 111. Первичная обработка и интерфейс пользователя реализованы на ЭВМ 113.
Пример 2
На Фиг. 2 показана схема устройства, элементы которого пронумерованы индексом 200. Существенным отличием от устройства по Примеру 1 является применение в приемном тракте двухплечевого интерферометра Майкельсона, построенного на базе симметричного оптоволоконного разветвителя 202 (предпочтительно 2X2), двух фарадеевских зеркал 204 и 206, линии задержки 203, представляющей собой фрагмент оптического волокна, длина которого определяется из требований к пространственной разрешающей способности и чувствительности используемого оптического волокна. Метод разнесения фаз реализуется при помощи фазового модулятором 205. Стоит отметить, что в Примере 2 требования по быстродействию снижаются на порядки по сравнению с Примером 1. Для осуществления развязки оптического сигнала между приемниками излучения 207, 208 применяется дополнительный циркулятор 201. Так как полный набор необходимых данных для оценки мгновенных значений фазового набега между центрами релеевского рассеяния в оптическом волокне происходит за 2, а не за 4 акта зондирования, то требования к длине когерентности постоянного лазерного излучения источника 101 снижаются вдвое.
Пример 3
На Фиг. 3 схематично представлена реализация другого устройства, новые элементы которого пронумерованы индексом 300. Существенным отличием от устройств, описанных в Примере 1 и в Примере 2, является применение в приемном тракте двухплечевого интерферометра Майкельсона, построенного на базе симметричного оптоволоконного разветвителя 301 (предпочтительно 2X2), фарадеевского зеркала 304, обычного зеркала 303 и линии задержки 302, отвечающей за подвижку компонентов зондирующего сигнала с ортогональной поляризацией относительно друг друга. Этот модуль подменяет собой узел 103. Вследствие того, что в указанном интерферометре применяются лишь пассивные оптоволоконные элементы, не требующие управления и контроля состояния, общая надежность системы возрастает.
Обработка сигналов
Вариант цифровой обработки сигналов для схем реализации устройства в устройствах, описанных в Примере 1 и в Примере 3, представлен на Фиг. 8. Зависимость отсчетов рефлектограммы от номера зондирующей пачки импульсов для любого выбранного канала 10 дальности может быть записана следующим образом Ik=A2+B2-2A⋅B⋅cos(φk+πk/2), где k - номер зондирующей пачки импульсов, Ik - отсчеты рефлектограммы в выбранном канале дальности, А и В - интенсивности рассеянного поля от первого и второго импульса в зондирующей пачке в заданном канале дальности, φk - фазовый набег в наблюдаемом канале дальности. Входные отсчеты Ik разделяются на два параллельных потока обработки. Рассмотрим по отдельности эти два потока. После линии задержки 701 и блока понижающей дискретизации 702 в 2 раза в одном из трактов (на фиг. 8 изображен верхним) формируются нечетные отсчеты входного сигнала: I2k-1=(-1)k⋅(А2+В2)-2А⋅В⋅sin(φ2k-1). Знакопеременный модулятор 703 преобразует данный сигнал к следующему виду: I'2k-1=(-1)k⋅(А2+В2)-2A⋅B⋅sin(φ2к-1). Применяя фильтр частот 704 с верхней частотой отсечки, меньшей 1/2 частоты Найквиста исходного цифрового сигнала, получим нечетную синусную квадратуру сигнала: S2к-1=-2⋅A⋅B⋅sin(φ2к-1). После блока повышающей дискретизации 705 и фильтра нижних частот 706 с частотой отсечки, равной 1/2 частоты Найквиста исходного цифрового сигнала, формируется аппроксимированная синусная квадратура сигнала: Sк=-2⋅А⋅В⋅sin(φk). Обработка в другом тракте (на фиг. 8 изображен нижним) осуществляется аналогичным образом. После блока понижающей дискретизации 708 в 2 раза в этом (нижнем) тракте формируются четные отсчеты входного сигнала: I2к=А2+В2-(-1)k⋅2⋅А⋅В⋅cos(φ2k). Знакопеременный модулятор 709 преобразует данный сигнал к следующему виду: I'2k=(-1)k (А2+В2)-2A⋅B⋅cos(φ2k). Применяя фильтр частот 710 с верхней частотой отсечки меньшей 1/2 частоты Найквиста исходного цифрового сигнала, получим четную косинусную квадратуру сигнала: C2k=-2⋅А⋅В⋅cos(φ2k). После блока повышающей дискретизации 711, линии задержки 712 и фильтра нижних частот 713 с частотой отсечки, равной 1/2 частоты Найквиста исходного цифрового сигнала, формируется аппроксимированная косинусная квадратура сигнала: Ck=-2⋅А⋅В⋅cos(φk). Квадратурный фазовый детектор 707, объединяющий оба тракта обработки, позволяет выделить информационную составляющую в виде оценки фазы φk. Заметим, что цифровые фильтры, используемые в обоих трактах формирования квадратур сигнала, имеют частоту среза, сколь угодно близкую к 1/2 частоты Найквиста исходного цифрового сигнала. Это означает, что при малых амплитудах колебаний значений фазы φk, для выполнения условий однозначного восстановления исходного сигнала фазы достаточно ограничений по спектру не более 1/2 частоты Найквиста.
Вариант цифровой обработки сигналов для схем реализации устройства, изображенного на фиг. 2, представлен на Фиг. 8. Два сигнала на выходе фотоприемников можно записать следующим образом:
I2k (1)=А2+В2-2⋅А⋅В⋅cos(φ2k)
I2k-1 (1)=А2+В2-2⋅А⋅В⋅sin(φ2k-1)
I2k (2)=А2+В2-2⋅А⋅В⋅cos(φ2k)
I2k-1 (2)=А2+В2-2⋅А⋅В⋅sin(φ2k-1)
После блока вычитания 804 постоянная составляющая (A2+B2) компенсируется. Сигнал на выходе имеет вид:
I2k=-4⋅А⋅В⋅cos(φ2k)
I2k-1=-4⋅A⋅B⋅sin(φ2k-1)
Далее обработка разделяется на два независимых цифровых тракта. Один тракт (на фиг. изображен верхним) обрабатывает нечетные элементы входной последовательности, другой (на фиг. изображен нижним) - четные. В верхнем тракте после линии задержки 801, блока повышающей дискретизации 802 и фильтра нижних частот 803 с частотой среза, равной 1/2 частоты Найквиста исходного сигнала, получим синусную квадратуру полезного сигнала: Sk=-4⋅А⋅В⋅sin(φk). Аналогичным образом в нижнем тракте после блока повышающей дискретизации 806 и фильтра нижних частот 807 с частотой среза, равной 1/2 частоты Найквиста исходного сигнала, получим косинусную квадратуру полезного сигнала: Ck=-4⋅А⋅В⋅cos(φk).
Квадратурный фазовый детектор 805, объединяющий оба тракта обработки, позволяет выделить информационную составляющую в виде оценки фазы φk. Цифровые фильтры, используемые в обоих трактах формирования квадратур сигнала и имеющие частоту среза, сколь угодно близкую к 1/2 частоты Найквиста исходного цифрового сигнала, обеспечивают при малых амплитудах колебаний значений фазы φk однозначное восстановление исходного сигнала фазы.
За счет применения в качестве зондирующего сигнала последовательности указанных пачек импульсов, сформированных при помощи фазового модулятора 102, поляризационного переключателя 103 и амплитудного модулятора 104, обеспечивает расширение полосы восстанавливаемых сигналов до 1/2 от частоты Найквиста. Ее особенность заключается в создании по определенному закону относительного фазового сдвига между импульсами пачки и последующей, адаптированной к структуре зондирующего сигнала и его цифровой обработке.
За счет модулирования состояния поляризации зондирующего сигнала обеспечивается существенное снижение количества нечувствительных каналов дальности.
Расширение класса оцениваемых и распознаваемых воздействий происходит за счет применения предлагаемых алгоритмов вычисления мгновенных значений фазового набега между центрами релеевского рассеяния в оптическом волокне, не требующих априорной информации о характере оцениваемого воздействия.
Таким образом, заявленный способ в представленной совокупности признаков обеспечивает повышение точности воспроизведения мгновенных значений фазового набега между центрами релеевского рассеяния в оптическом волокне, улучшение возможностей по оценке быстро меняющихся параметров вибрационных и акустических сигналов, повышение надежности обнаружения слабых воздействий и их сопровождения в случае их перемещения вдоль датчика, расширение класса оцениваемых и распознаваемых воздействий.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛЕННЫЙ ДАТЧИК АКУСТИЧЕСКИХ И ВИБРАЦИОННЫХ ВОЗДЕЙСТВИЙ | 2013 |
|
RU2532562C1 |
| Волоконно-оптическое устройство мониторинга трубопроводов | 2016 |
|
RU2637722C1 |
| Устройство для мониторинга виброакустических характеристик протяженных объектов | 2024 |
|
RU2837066C1 |
| СПОСОБ КОНТРОЛЯ ПОЛЯ ВИБРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2568416C1 |
| Устройство для мониторинга виброакустических характеристик протяженных объектов | 2024 |
|
RU2830211C1 |
| Устройство квантовой криптографии (варианты) | 2015 |
|
RU2622985C1 |
| Способ измерения параметров неоднородностей показателя преломления вдоль оптического волокна и оптический рефлектометр частотной области | 2022 |
|
RU2797693C1 |
| СПОСОБ КОНТРОЛЯ ПОЛЯ ВИБРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2568417C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| ОПТИЧЕСКАЯ СХЕМА КОЛЬЦЕВОГО ИНТЕРФЕРОМЕТРА ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 2009 |
|
RU2449246C2 |
Способ оценки вибрационных или акустических сигналов вдоль протяженных объектов на базе волоконно-оптического когерентного рефлектометра с амплитудной, фазовой и поляризационной модуляцией зондирующего излучения. При этом определяют информационную составляющую оценки сигнала в виде мгновенного значения фазового набега между центрами релеевского рассеяния в оптическом волокне. Полученные значения разделяют на два параллельных потока обработки, где один обрабатывает нечетные элементы входной последовательности, а другой – четные. После объединения посредством квадратурного фазового детектора выделяют информационную составляющую. Технический результат заявленного решения заключается в повышении точности воспроизведения мгновенных значений фазового набега между центрами релеевского рассеяния в оптическом волокне и улучшении возможностей по оценке быстро меняющихся параметров вибрационных и акустических сигналов, повышении надёжности обнаружения слабых воздействий и их сопровождения в случае их перемещения вдоль датчика. 4 з.п. ф-лы, 8 ил.
1. Способ оценки вибрационных или акустических сигналов вдоль протяженных объектов, включающий использование источника когерентного излучения, в качестве которого используют полупроводниковый лазер с распределенной обратной связью, чувствительного элемента в виде оптического волокна, приемного тракта, сигнальный тракт, при этом ввод зондирующего сигнала в оптическое волокно, развязка зондирующего сигнала и обратнорассеянного релеевского излучения осуществляется при помощи оптического циркулятора, отличающийся тем, что зондирующий сигнал формируют в виде последовательности пачек импульсов при помощи фазового модулятора, поляризационного переключателя и амплитудного модулятора, определяют информационную составляющую оценки вибрационного или акустического сигнала в виде мгновенного значения фазового набега между центрами релеевского рассеяния в оптическом волокне - φk, используя формулу Ik=A2+B2-2⋅A⋅Bcos(φk+πk/2), характеризующую зависимость мгновенных значений фазового набега φk между центрами релеевского рассеяния в наблюдаемом канале дальности и отсчетов рефлектограммы от номера зондирующей пачки импульсов для любого выбранного канала дальности, где k - номер зондирующей пачки импульсов, Ik - отсчеты рефлектограммы в выбранном канале дальности, А и В - интенсивности рассеянного поля от первого и второго импульса в зондирующей пачке в заданном канале дальности, причем отсчеты Ik разделяют на два параллельных потока обработки - на два независимых цифровых тракта, где один тракт обрабатывает нечетные элементы входной последовательности, а другой - четные, причем в тракте, который обрабатывает нечетные элементы входной последовательности, формируют аппроксимированную синусную квадратуру сигнала по формуле Sk=-2⋅A⋅B⋅sin(φk), а в тракте, который обрабатывает четные элементы входной последовательности, формируют аппроксимированную косинусную квадратуру сигнала по формуле Ck=-2⋅A⋅B⋅cos(φk), а после объединения в обоих трактах обработки посредством квадратурного фазового детектора выделяют информационную составляющую в виде мгновенных значений фазового набега между центрами релеевского рассеяния в оптическом волокне - φk.
2. Способ по п. 1, отличающийся тем, что приемный тракт выполняют из приемника оптического излучения и аналого-цифрового преобразователя.
3. Способ по п. 1, отличающийся тем, что приемный тракт выполняют из двухплечевого интерферометра Майкельсона, созданного на базе симметричного оптоволоконного разветвителя, двух фарадеевских зеркал, линии задержки, которую выполняют в виде фрагмента волокна, причем для осуществления развязки оптического сигнала между приемниками излучения применяют дополнительный циркулятор.
4. Способ по п. 1, отличающийся тем, что сигнальный тракт содержит двухплечевой интерферометр Майкельсона, выполненный на базе симметричного оптоволоконного разветвителя, фарадеевского зеркала, обычного зеркала, линии задержки, отвечающей за подвижку компонент зондирующего сигнала с ортогональной поляризацией относительно друг друга.
5. Способ по п. 1, отличающийся тем, что после формирования зондирующий сигнал усиливают.
| US 20110255077 A1, 20.10.2011 | |||
| WO 2004040241 A1, 13.05.2004 | |||
| СИНТЕЗАТОР АУДИОСИГНАЛА И КОДИРУЮЩЕЕ УСТРОЙСТВО АУДИОСИГНАЛА | 2009 |
|
RU2491658C2 |
| РАСПРЕДЕЛЕННЫЙ ДАТЧИК АКУСТИЧЕСКИХ И ВИБРАЦИОННЫХ ВОЗДЕЙСТВИЙ | 2013 |
|
RU2532562C1 |

