Изобретение относится к области электротехники, а именно к технологии электромашиностроения, в частности к контролю посадочного натяга обода ротора электрической машины на остов, при этом на основе эффекта акустоупругости учитывается изменение напряженного состояния клиньев, обеспечивающих натяг обода ротора на остов.
Известен способ диагностики состояния посадочных натягов бандажных колец без разборки бандажного узла (RU 2145144, МПК H02K 15/02, H02K 15/00. Способ диагностики состояния посадочных натягов бандажных колец на составные части ротора электрической машины (варианты)), заключающийся в том, что оценку изменения натягов в местах посадки бандажных колец проводят до пуска турбогенератора в эксплуатацию и в процессе проведения ремонтных работ путем сравнительных измерений наружных диаметров колец контрольной стрелой.
Недостатком способа является то, что при расчете величины изменения натяга используется соотношение коэффициентов податливости бандажных колец и ротора, что вносит значительные погрешности. Кроме того, определение численного значения этих коэффициентов является трудоемкой задачей, т.к. необходимо проводить расчет с учетом геометрии, упругих модулей или проводить дополнительные натурные испытания.
Известен способ вибродиагностики состояния посадочных натягов бандажных колец на бочку ротора электрической машины (RU 2289185 C1, МПК H02K 15/00, G01R 31/34. Способ диагностики состояния посадочных натягов бандажных колец на бочку ротора электрической машины), согласно которому дефект в роторе выявляют путем сравнительного измерения вибросмещения или виброскорости вала ротора или опорных подшипников электрической машины в различных режимах ее эксплуатации.
Недостатком способа является то, что появление и изменение вибросмещений может быть обусловлено не только ослаблением натяга бандажных колец на бочке ротора, но и другими факторами. Другими недостатками способа являются отсутствие информации об изменении напряженного состояния бандажных колец на бочке ротора и отсутствие количественных критериев ослабления натяга, регламентирующих дальнейшую эксплуатацию машины.
В качестве прототипа выбран способ контроля натяга обода ротора, заключающийся в измерении радиуса обода по валу до боковой поверхности при его расклиновке (СТО 17330282.27.140.001-2006 «Методики оценки технического состояния основного оборудования гидроэлектростанций»). Способ позволяет с помощью парных встречных клиньев обеспечить необходимый натяг обода на остов и довести форму обода до значений, указанных в нормативных документах.
Недостатком способа является то, что для периодического контроля натяга на различных этапах эксплуатации электрической машины необходимо проводить разборку ротора, что весьма трудоемко и экономически невыгодно. Кроме того, при данном способе не контролируется состояние отдельных клиньев, обеспечивающих натяг.
Следует заметить, что измерение линейных размеров обода ротора, в общем случае, не достаточно для принятия решения о возможности дальнейшей эксплуатации электрической машины. Величина натяга может находиться в допустимых пределах, тогда как в клиньях, удерживающих обод на остове, вследствие различных факторов могут значительно уменьшиться усилия обжатия, т.е. обод может находиться, практически, в свободном состоянии. Это может привести к возникновению аварийной ситуации.
Предлагаемый способ контроля натяга обода ротора лишен недостатков известных способов, описанных выше.
Технический результат предлагаемого изобретения заключается в контроле посадочного натяга обода на остов без разборки ротора и достигается за счет оценки изменения напряженного состояния клиньев, обеспечивающих натяг. Предлагаемый способ позволяет регистрировать факт уменьшения посадочного натяга ниже критического.
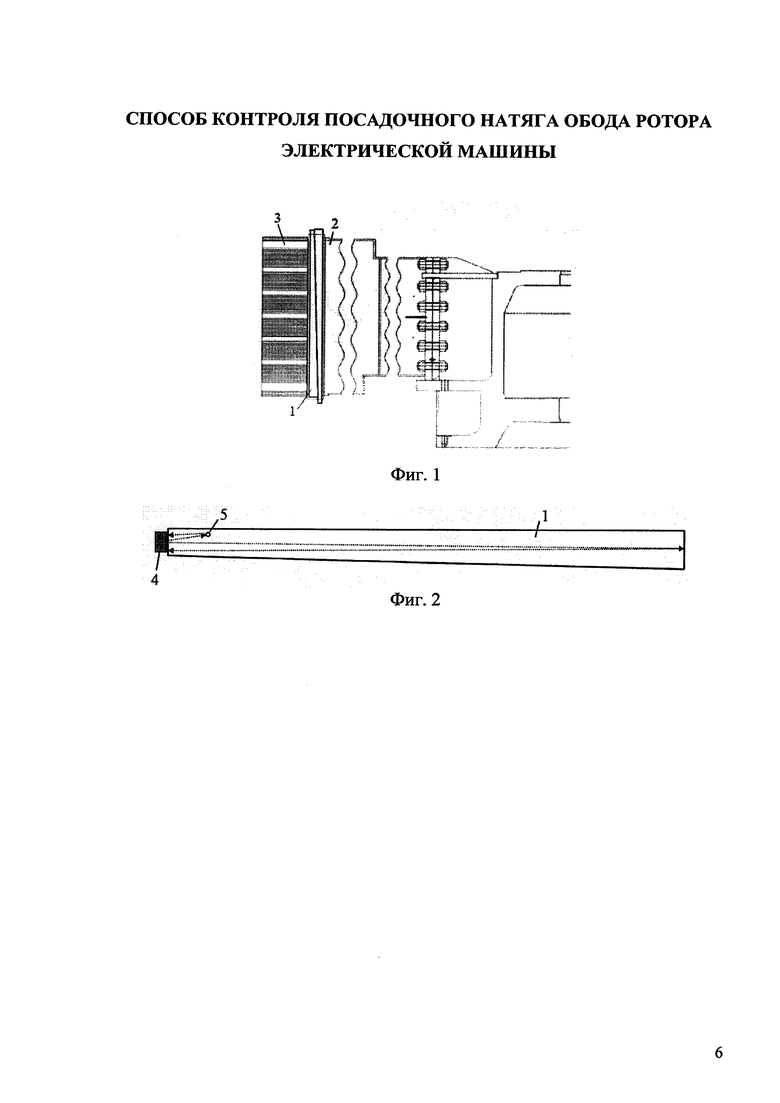
Сущность предлагаемого способа заключается в следующем. На торцевую поверхность закладного клина 1 (фиг. 1), расположенного между остовом ротора 2 и ободом 3 (фиг. 1), устанавливается преобразователь упругих волн 4 (фиг. 2). С помощью преобразователя в тело клина 1 вводятся упругие волны (фиг. 1, фиг. 2). Далее регистрируются временная задержка t1 импульса, отраженного от искусственного отражателя 5 в теле клина, и временная задержка t2 импульса, отраженного от обратной торцевой поверхности клина.
При достаточно малой длине клина и достаточно малой величине затухания упругих волн в клине в качестве t1 может быть выбрана временная задержка первого импульса, отраженного от обратной торцевой поверхности клина (прошедшего путь, равный двойной длине клина), а в качестве t2 может быть выбрана временная задержка второго импульса, отраженного от обратной торцевой поверхности клина (прошедшего путь, равный четырем длинам клина). Кроме того, в качестве t1 может быть выбрана временная задержка зондирующего импульса, однако, это связано с большими погрешностями, связанными с особенностями акустической аппаратуры, в том числе преобразователей упругих волн.
В качестве информативного параметра определяется разность временных задержек t=t2-t1.
Временные задержки измеряются до расклиновки, после расклиновки, а также после наработки при плановых остановках электрической машины.
Величина P, характеризующая усилие обжатия i-го клина и связанная с его напряженным состоянием, определяется как относительное изменение разности временных задержек:

где t0 - значение разности временных задержек в ненагруженном клине (до расклиновки), tσ - значение разности временных задержек в нагруженном клине, i - номер клина.
Посадочный натяг обода ротора δ пропорционален среднему значению величин Рi.

где k - коэффициент пропорциональности (определяется после расклиновки путем сопоставления значения натяга, измеренного механическим способом, со средним значением Pi), n - количество клиньев в роторе.
Во время остановки электрической машины для профилактических работ без демонтажа ротора снова измеряются временные задержки, определяются величины Pi по формуле (1) и рассчитывается значение 8 по формуле (2). При периодическом мониторинге отслеживаются изменения величин Pi в клиньях:

где Pнараб - величина P, измеренная после наработки, Pраскл - величина P, измеренная после расклиновки.
При уменьшении посадочного натяга δ ниже критического значения и при увеличении дисперсии изменений значений Pi выше критического значения считается, что состояние натяга обода ротора является неудовлетворительным и электрическая машина останавливается для ремонта.
Изобретение относится к электротехнике, а именно к способу контроля посадочного натяга обода ротора электрической машины. Способ содержит ввод до установки клиньев, после расклиновки и в процессе эксплуатации электрической машины с торцевой поверхности закладных клиньев упругих волн, измерение временных задержек упругих волн для каждого клина и расчет величины (P) - относительного изменения разности временных задержек распространения упругих волн в клине. В процессе эксплуатации электрической машины состояние натяга определяется по среднему значению величины P и значению дисперсии изменений величины P. Технический результат состоит в контроле посадочного натяга обода на остов без разборки ротора посредством оценки изменения напряженного состояния клиньев, обеспечивающих натяг. 4 з.п. ф-лы, 2 ил.
1. Способ контроля посадочного натяга обода ротора электрической машины, заключающийся в том, что при расклиновке натяг обода контролируется измерением радиуса обода по валу до боковой поверхности, отличающийся тем, что на торцевую поверхность клина, расположенного между остовом ротора и ободом, устанавливается преобразователь упругих волн, с помощью преобразователя в тело клина вводятся упругие волны, регистрируются временная задержка импульса, отраженного от искусственного отражателя в теле клина, и временная задержка импульса, отраженного от обратной торцевой поверхности клина, временные задержки измеряются до расклиновки, после расклиновки, а также после наработки при плановых остановках электрической машины, рассчитывается величина Р, определяемая как относительное изменение разности временных задержек распространения упругих волн в клиньях, рассчитывается натяг, определяемый как среднее значение величины Р по всем клиньям с учетом коэффициента пропорциональности, который определяется после расклиновки путем сопоставления значения посадочного натяга обода ротора, измеренного механическим способом, со средним значением Р.
2. Способ контроля посадочного натяга обода ротора электрической машины по п. 1, отличающийся тем, что в процессе эксплуатации состояние натяга определяется с помощью двух критериев: среднего значения величины Р, определяемой как относительное изменение разности временных задержек распространения упругих волн в клиньях, и значения дисперсии изменения величины Р.
3. Способ контроля посадочного натяга обода ротора электрической машины по п. 1, отличающийся тем, что измерения проводят в закладных клиньях.
4. Способ контроля посадочного натяга обода ротора электрической машины по п. 1, отличающийся тем, что для повышения точности измерений в клиньях изготавливаются искусственные отражатели.
5. Способ контроля посадочного натяга обода ротора электрической машины по п. 1, отличающийся тем, что для расчета величины Р можно использовать временную задержку импульса, однократно отраженного от обратной торцевой поверхности клина, и временную задержку импульса, двукратно отраженного от обратной торцевой поверхности клина.
| Способ определения средней скорости ультразвука в плавно-неоднородном слое | 1987 |
|
SU1460620A1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ПОСАДОЧНЫХ НАТЯГОВ БАНДАЖНЫХ КОЛЕЦ НА БОЧКУ РОТОРА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2005 |
|
RU2289185C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОВЕРХНОСТНОЙ УЛЬТРАЗВУКОВОЙ ВОЛНЫ | 2012 |
|
RU2490606C1 |
| US 3690155 A, 12.09.1972 | |||
| US 4388830 A, 21.06.1983 | |||
| KR 20140004987 A, 14.01.2014. | |||

