Изобретение относится к области автоматического управления динамическими объектами и обеспечивает формирование программных траекторий перемещения программной точки с заданной скоростью.
Известно устройство для автоматической подстройкой частоты входного гармонического сигнала, содержащее последовательно соединенные первый сумматор, корректирующее устройство, усилитель, двигатель, редуктор, датчик положения, выход которого соединен с первым входом первого сумматора, последовательно соединенные блок вычисления модуля, вход которого соединен с выходом первого сумматора, второй сумматор, релейный элемент, запоминающее устройство, информационный вход которого соединен с выходом блока вычисления модуля и через устройство задержки со вторым входом второго сумматора, третий сумматор, второй вход которого соединен с выходом первого задатчика сигнала, первый интегратор, фильтр низких частот второго порядка, четвертый сумматор, второй вход которого соединен с выходом второго задатчика сигнала, второй интегратор, синусный функциональный преобразователь, блок умножения, второй вход которого соединен с третьим задатчиком сигнала, а выход - со вторым входом первого сумматора (патент РФ №2399079, кл. G05B 13/00, B25J 13/00, бюл. №25, 2010).
Недостаток этого устройства в том, что оно предназначено для формирования программной скорости перемещения в одной степени свободы динамического объекта и только по гармонической траектории. Формирование других видов программных сигналов с помощью этого устройства невозможно.
Известно также устройство формирования программных сигналов управления, содержащее последовательно соединенные первый задатчик сигнала, первый сумматор, первый интегратор, последовательно соединенные нелинейный элемент, вход которого соединен с выходом первого интегратора, ключ, второй вход которого соединен с выходом второго задатчика сигнала, блок деления, второй интегратор, второй сумматор, второй вход которого соединен с первым выходом навигационной системы, первый квадратор, третий сумматор, второй вход которого через второй квадратор соединен с выходом четвертого сумматора, а третий вход через третий квадратор - с выходом пятого сумматора, и первый блок извлечения корня, выход которого соединен со вторым входом первого сумматора, последовательно соединенные первый функциональный преобразователь, вход которого соединен с выходом второго интегратора, с входом второго функционального преобразователя, с входом первой следящей системы, через третий функциональный преобразователь - с первым входом четвертого сумматора, второй вход которого соединен со вторым выходом навигационной системы, с входом второй следящей системы и через четвертый функциональный преобразователь - с входом третьей следящей системы и с первым входом пятого сумматора, второй вход которого соединен с третьим выходом навигационной системы, четвертый квадратор, шестой сумматор, второй вход которого через пятый квадратор соединен с выходом второго функционального преобразователя, а третий вход - с выходом третьего задатчика сигнала, и второй блок извлечения корня, выход которого соединен со вторым входом блока деления (патент РФ №2453891, кл. G05B 13/02, бюл. №17, 2012).
Это устройство по своей технической сущности является наиболее близким к предлагаемому решению и принято за прототип.
Недостатками прототипа являются сложность реализации содержащихся в нем функциональных преобразователей для определения отклонения программной точки от желаемой траектории и невозможность использования этого устройства для построения программных перемещений динамических объектов вдоль траекторий, задаваемых параметрическими сплайнами. Более того, это устройство формирует только максимальную скорость движения объектов по заданным траекториям, что часто связано с повышенным расходом энергии и не всегда необходимо.
Задачей заявляемого технического решения является формирование положения программной точки (желаемого положения динамического объекта), перемещающейся по траекториям, задаваемым параметрическими сплайнами, с желаемой скоростью.
Технический результат, который может быть получен при реализации заявляемого решения, заключается в формировании скорости изменения параметров каждого из сплайнов, образующих траектории движения динамических объектов, таким образом, чтобы программные точки двигались по этим траекториям с требуемой скоростью.
Поставленная задача решается тем, что в устройство формирования программных сигналов управления, содержащее навигационную систему, первую, вторую и третью следящие системы управления динамическими объектами, и последовательно соединенные первый сумматор, первый квадратор, второй сумматор, второй вход которого через второй квадратор подключен к выходу третьего сумматора, а третий вход через третий квадратор - к выходу четвертого сумматора, и блок извлечения квадратного корня, дополнительно вводятся последовательно соединенные пятый сумматор, первый вход которого подключен к первому выходу навигационной системы, к первому входу шестого сумматора и к первому входу седьмого сумматора, а второй вход - ко второму выходу навигационной системы и ко второму входу шестого сумматора, восьмой сумматор, второй вход которого подключен к третьему выходу навигационной системы и к третьему входу шестого сумматора, а третий вход - к четвертому выходу навигационной системы, первый блок умножения, выход которого подключен к первому входу первого сумматора, девятый сумматор, второй вход которого подключен ко второму входу первого сумматора и к выходу пятого сумматора, а третий - к третьему входу первого сумматора и выходу второго блока умножения, третий блок умножения, выход которого подключен ко второму входу седьмого сумматора, соединенного выходом с входом первой следящей системы, последовательно соединенные десятый сумматор, первый вход которого подключен к пятому выходу навигационной системы, и первым входам одиннадцатого и двенадцатого сумматоров, а второй вход - к шестому выходу навигационной системы и второму входу одиннадцатого сумматора, тринадцатый сумматор, второй вход которого подключен к седьмому выходу навигационной системы и третьему входу одиннадцатого сумматора, а третий вход - к восьмому выходу навигационной системы, четвертый блок умножения, выход которого подключен к первому входу третьего сумматора, четырнадцатый сумматор, второй вход которого подключен ко второму входу третьего сумматора и к выходу десятого сумматора, а третий вход - к третьему входу третьего сумматора и к выходу пятого блока умножения, и шестой блок умножения, подключенный выходом ко второму входу двенадцатого сумматора, выход которого подключен к входу второй следящей системы, последовательно соединенные пятнадцатый сумматор, первый вход которого подключен к девятому выходу навигационной системы, первому входу шестнадцатого сумматора и первому входу семнадцатого сумматора, а второй вход - к десятому выходу навигационной системы и второму входу шестнадцатого сумматора, восемнадцатый сумматор, второй вход которого соединен с одиннадцатым выходом навигационной системы и третьим входом шестнадцатого сумматора, а третий вход - с двенадцатым выходом навигационной системы, седьмой блок умножения, выход которого подключен к первому входу четвертого сумматора, девятнадцатый сумматор, второй вход которого подключен ко второму входу четвертого сумматора и к выходу пятнадцатого сумматора, а третий вход - к третьему входу четвертого сумматора и к выходу восьмого блока умножения, девятый блок умножения, выход которого подключен ко второму входу семнадцатого сумматора, подключенного выходом к входу третьей следящей системы, последовательно соединенные блок деления, вход делителя которого подключен к выходу блока извлечения квадратного корня, а вход делимого - к выходу задатчика сигнала, интегратор и четвертый квадратор, вход которого подключен также ко вторым входам третьего, шестого и девятого блоков умножения и к первым входам второго, пятого и восьмого блоков умножения, вторые входы которых подключены соответственно к выходам шестого, одиннадцатого и шестнадцатого сумматоров, а выход четвертого квадратора подключен ко вторым входам первого, четвертого и седьмого блоков умножения.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналогов и прототипа свидетельствуют о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения обеспечивают возможность применения описанного устройства для формирования требуемой скорости движения программной точки по траектории, заданной параметрическими сплайнами.
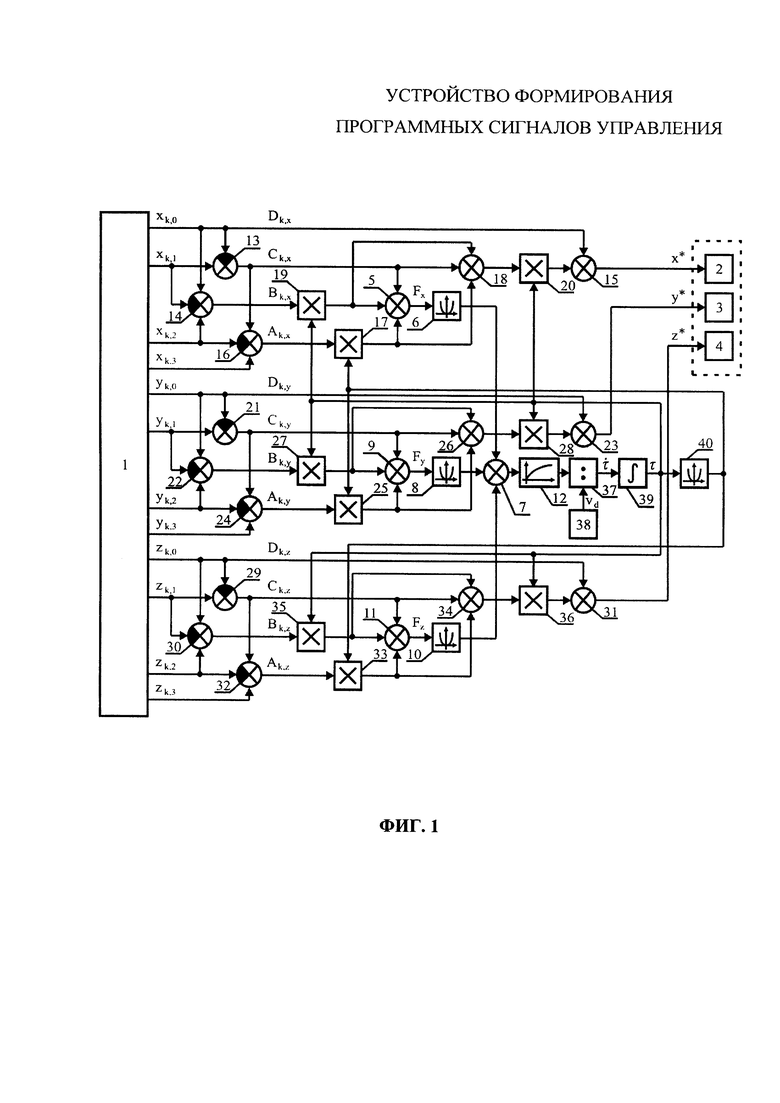
Сущность заявляемого технического решения поясняется чертежом, где на фиг. 1 приведена блок-схема устройства формирования программных сигналов управления.
Устройство содержит навигационную систему 1, первую 2, вторую 3 и третью 4 следящие системы управления динамическими объектами, и последовательно соединенные первый сумматор 5, первый квадратор 6, второй сумматор 7, второй вход которого через второй квадратор 8 подключен к выходу третьего сумматора 9, а третий вход через третий квадратор 10 - к выходу четвертого сумматора 11, и блок 12 извлечения квадратного корня, последовательно соединенные пятый сумматор 13, первый вход которого подключен к первому выходу навигационной системы 1, к первому входу шестого сумматора 14 и к первому входу седьмого сумматора 15, а второй вход - ко второму выходу навигационной системы 1 и ко второму входу шестого сумматора 14, восьмой сумматор 16, второй вход которого подключен к третьему выходу навигационной системы 1 и к третьему входу шестого сумматора 14, а третий вход - к четвертому выходу навигационной системы 1, первый блок 17 умножения, выход которого подключен к первому входу первого сумматора 5, девятый сумматор 18, второй вход которого подключен ко второму входу первого сумматора 5 и к выходу пятого сумматора 13, а третий - к третьему входу первого сумматора 5 и выходу второго блока 19 умножения, третий блок 20 умножения, выход которого подключен ко второму входу седьмого сумматора 15, соединенного выходом с входом первой следящей системы 2, последовательно соединенные десятый сумматор 21, первый вход которого подключен к пятому выходу навигационной системы 1 и первым входам одиннадцатого 22 и двенадцатого 23 сумматоров, а второй вход - к шестому выходу навигационной системы 1 и второму входу одиннадцатого сумматора 22, тринадцатый сумматор 24, второй вход которого подключен к седьмому выходу навигационной системы 1 и третьему входу одиннадцатого сумматора 22, а третий вход - к восьмому выходу навигационной системы 1, четвертый блок 25 умножения, выход которого подключен к первому входу третьего сумматора 9, четырнадцатый сумматор 26, второй вход которого подключен ко второму входу третьего сумматора 9 и к выходу десятого сумматора 21, а третий вход - к третьему входу третьего сумматора 9 и к выходу пятого блока 27 умножения, и шестой блок 28 умножения, подключенный выходом ко второму входу двенадцатого сумматора 23, выход которого подключен к входу второй следящей системы 3, последовательно соединенные пятнадцатый сумматор 29, первый вход которого подключен к девятому выходу навигационной системы 1, первому входу шестнадцатого сумматора 30 и первому входу семнадцатого сумматора 31, а второй вход - к десятому выходу навигационной системы 1 и второму входу шестнадцатого сумматора 30, восемнадцатый сумматор 32, второй вход которого соединен с одиннадцатым выходом навигационной системы 1 и третьим входом шестнадцатого сумматора 30, а третий вход - с двенадцатым выходом навигационной системы 1, седьмой блок 33 умножения, выход которого подключен к первому входу четвертого сумматора 11, девятнадцатый сумматор 34, второй вход которого подключен ко второму входу четвертого сумматора 11 и к выходу пятнадцатого сумматора 29, а третий вход - к третьему входу четвертого сумматора 11 и к выходу восьмого блока 35 умножения, девятый блок 36 умножения, выход которого подключен ко второму входу семнадцатого сумматора 31, подключенного выходом к входу третьей следящей системы 4, последовательно соединенные блок 37 деления, вход делителя которого подключен к выходу блока 12 извлечения квадратного корня, а вход делимого - к выходу задатчика 38 сигнала, интегратор 39 и четвертый квадратор 40, вход которого подключен также ко вторым входам третьего 20, шестого 28 и девятого 36 блоков умножения и к первым входам второго 19, пятого 27 и восьмого 35 блоков умножения, вторые входы которых подключены соответственно к выходам шестого 14, одиннадцатого 22 и шестнадцатого 30 сумматоров, а выход четвертого квадратора 40 подключен ко вторым входам первого 17, четвертого 25 и седьмого 33 блоков умножения.
На фиг. 1 введены следующие обозначения: xk.i, yk.i, zk.i( ) - координаты точек, используемые при построении k-го сплайна;
) - координаты точек, используемые при построении k-го сплайна;  - скорость изменения параметра τk-го сплайна, по которому в текущий момент времени движется программная точка; х*, у*, z* - координаты, задающие положение программной точки на сплайне в абсолютной системе координат.
- скорость изменения параметра τk-го сплайна, по которому в текущий момент времени движется программная точка; х*, у*, z* - координаты, задающие положение программной точки на сплайне в абсолютной системе координат.
Заявляемое устройство работает следующим образом.
В начальный момент времени индексу k присваивается значение 1 и на соответствующих выходах навигационной системы 1 формируются сигналы x1,i, y1,i z1,i  .
.
Первые отрицательные входы сумматоров 13, 21, 29 имеют единичные коэффициенты усиления, а вторые положительные входы - коэффициенты усиления 3. В результате на их выходах формируются сигналы 
 соответственно.
соответственно.
Первые и третьи положительные входы сумматоров 14, 22, 30 имеют соответственно коэффициенты усиления 3, а вторые отрицательные входы - коэффициенты усиления 6. В результате на их выходах формируются сигналы  соответственно.
соответственно.
Первые и третьи положительные входы сумматоров 16, 24, 32 имеют единичные коэффициенты усиления, а их вторые отрицательные входы - коэффициенты усиления 3. В результате на их выходах соответственно формируются сигналы 
 ,
, 
В начальный момент времени на выходе интегратора 39 формируется сигнал τ=0, τ∈[0,1], который представляет собой параметр k-го сплайна, его суть будет пояснена ниже. При выполнении условия τ=1 интегратор обнуляется, а индексу k присваивается следующее значение k+1. На выходе квадратора 40 формируется сигнал τ2, на выходах блоков 19, 27, 35 - соответственно сигналы Вk,хτ, Вk,уτ, Bk,zτ, а на выходах блоков 17, 25, 33 - соответственно сигналы Аk,хτ2, Аk,уτ2, Аk,zτ2.
Все положительные входы сумматоров 18, 26, 34 имеют единичные коэффициенты усиления. В результате на выходах этих сумматоров формируются, соответственно, сигналы (Аk,xτ2+Вk,хτ+Сk,х), (Аk,уτ2+Вk,уτ+Ck,у), (Ak,zτ2+Bk,zτ+Ck,z), а на выходах блоков 20, 28, 36 - соответственно сигналы (Аk,хτ3+Вk,xτ2+Сk,хτ), (Аk,yτ3+Вk,уτ2+Сk,уτ), (Ak,zτ3+Bk,zτ2+Ck,zτ).
Входы сумматоров 15, 23, 31 имеют единичные коэффициенты усиления. В результате на входах первой 2, второй 3 и третьей 4 следящих систем соответственно формируются сигналы



Первые (со стороны блоков 17, 25 и 33), вторые (со стороны сумматоров 13, 21 и 29) и третьи положительные входы сумматоров 5, 9 и 11 имеют коэффициенты усиления, равные 3, 1 и 2 соответственно. В результате на выходах этих сумматоров получаются сигналы  ,
,  которые через квадраторы 6, 8, 10 поступают соответственно на положительные единичные входы сумматора 7. В результате на выходе этого сумматора получается сигнал
которые через квадраторы 6, 8, 10 поступают соответственно на положительные единичные входы сумматора 7. В результате на выходе этого сумматора получается сигнал Задатчик 38 формирует сигнал vd скорости движения объекта по сплайну, а на выходе блока 37 появляется сигнал
Задатчик 38 формирует сигнал vd скорости движения объекта по сплайну, а на выходе блока 37 появляется сигнал

Из теории известно, что траекторию движения программной точки, состоящую из K сплайнов, можно описать параметрическими полиномами третьей степени (Rogers D.F., Adams J.A. Mathematical elements for computer graphics. - McGraw-Hill, 1976. - 239 p.)
где Ak,x, Ak,y, Ak,z, Bk,x, Bk,y, Bk,z, Ck,x, Ck,y, Ck,z, Dk,x, Dk,y, Dk,z - коэффициенты k-го сплайна при соответствующих степенях параметра τ∈[0,1], изменяющегося во времени t и определяющего положение программной точки на сплайне, перемещающейся от начала (при τ=0) до конца (при τ=1) сплайна. Скорость движения этой точки определяется только скоростью изменения параметра τ.
Обычно положением указанной точки на каждом отдельном сплайне управляют, равномерно изменяя параметр τ от 0 до 1. При этом скорость перемещения этой точки явно не задается, что недопустимо при выполнении многих технологических операций.
Для перемещения программной точки вдоль траектории (2) с желаемой скоростью vd необходимо определить ее зависимость от , которую можно получить, продифференцировав уравнение (2) по времени
где

Учитывая, что вместо выражения (3) можно записать
вместо выражения (3) можно записать
а в итоге получить закон формирования  с учетом желаемой скорости vd в виде выражения (1).
с учетом желаемой скорости vd в виде выражения (1).
Таким образом, за счет введения дополнительных элементов и новых связей между ними удалось создать новое устройство, обеспечивающее формирование программных сигналов для управления различными динамическими объектами при их перемещении вдоль траекторий, задаваемых параметрическими сплайнами, со скоростью vd, которая в процессе движения указанных объектов может целенаправленно изменяться в зависимости от выполнения конкретных задач производственного цикла или миссий.
Практическая реализация предлагаемого устройства не вызывает затруднений, так как в нем использованы только типовые электронные элементы.
Изобретение относится к области автоматического управления динамическими объектами и обеспечивает формирование программных траекторий перемещения программной точки с заданной скоростью. Устройство формирования программных сигналов управления содержит навигационную систему, первую, вторую и третью следящие системы управления динамическими объектами, а также сумматоры, квадраторы, блок извлечения квадратного корня, блоки умножения, блок деления, задатчик сигнала и интегратор. Технический результат заключается в формировании скорости изменения параметров каждого из сплайнов, образующих траектории движения динамических объектов, таким образом, чтобы программные точки двигались по этим траекториям с требуемой скоростью. 1 ил.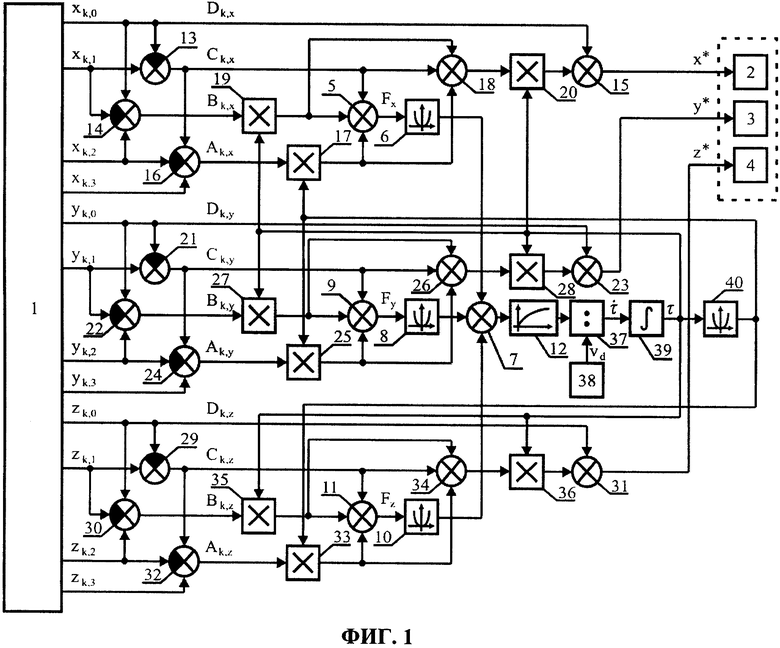
Устройство формирования программных сигналов управления, содержащее навигационную систему, первую, вторую и третью следящие системы управления динамическими объектами, и последовательно соединенные первый сумматор, первый квадратор, второй сумматор, второй вход которого через второй квадратор подключен к выходу третьего сумматора, а третий вход через третий квадратор - к выходу четвертого сумматора, и блок извлечения квадратного корня, отличающееся тем, что в него дополнительно вводят последовательно соединенные пятый сумматор, первый вход которого подключен к первому выходу навигационной системы, к первому входу шестого сумматора и к первому входу седьмого сумматора, а второй вход - ко второму выходу навигационной системы и ко второму входу шестого сумматора, восьмой сумматор, второй вход которого подключен к третьему выходу навигационной системы и к третьему входу шестого сумматора, а третий вход - к четвертому выходу навигационной системы, первый блок умножения, выход которого подключен к первому входу первого сумматора, девятый сумматор, второй вход которого подключен ко второму входу первого сумматора и к выходу пятого сумматора, а третий - к третьему входу первого сумматора и выходу второго блока умножения, третий блок умножения, выход которого подключен ко второму входу седьмого сумматора, соединенного выходом со входом первой следящей системы, последовательно соединенные десятый сумматор, первый вход которого подключен к пятому выходу навигационной системы и первым входам одиннадцатого и двенадцатого сумматоров, а второй вход - к шестому выходу навигационной системы и второму входу одиннадцатого сумматора, тринадцатый сумматор, второй вход которого подключен к седьмому выходу навигационной системы и третьему входу одиннадцатого сумматора, а третий вход - к восьмому выходу навигационной системы, четвертый блок умножения, выход которого подключен к первому входу третьего сумматора, четырнадцатый сумматор, второй вход которого подключен ко второму входу третьего сумматора и к выходу десятого сумматора, а третий вход - к третьему входу третьего сумматора и к выходу пятого блока умножения, и шестой блок умножения, подключенный выходом ко второму входу двенадцатого сумматора, выход которого подключен к входу второй следящей системы, последовательно соединенные пятнадцатый сумматор, первый вход которого подключен к девятому выходу навигационной системы, первому входу шестнадцатого сумматора и первому входу семнадцатого сумматора, а второй вход - к десятому выходу навигационной системы и второму входу шестнадцатого сумматора, восемнадцатый сумматор, второй вход которого соединен с одиннадцатым выходом навигационной системы и третьим входом шестнадцатого сумматора, а третий вход - с двенадцатым выходом навигационной системы, седьмой блок умножения, выход которого подключен к первому входу четвертого сумматора, девятнадцатый сумматор, второй вход которого подключен ко второму входу четвертого сумматора и к выходу пятнадцатого сумматора, а третий вход - к третьему входу четвертого сумматора и к выходу восьмого блока умножения, девятый блок умножения, выход которого подключен ко второму входу семнадцатого сумматора, подключенного выходом к входу третьей следящей системы, последовательно соединенные блок деления, вход делителя которого подключен к выходу блока извлечения квадратного корня, а вход делимого - к выходу задатчика сигнала, интегратор и четвертый квадратор, вход которого подключен также ко вторым входам третьего, шестого и девятого блоков умножения и к первым входам второго, пятого и восьмого блоков умножения, вторые входы которых подключены соответственно к выходам шестого, одиннадцатого и шестнадцатого сумматоров, а выход четвертого квадратора подключен ко вторым входам первого, четвертого и седьмого блоков умножения.
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523187C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523186C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| EP 2055446 A1, 06.05.2009. | |||

