Изобретение относится к области волоконной оптики и может быть использовано при конструировании волоконно-оптических гироскопов и других датчиков физических величин на основе одномодовых световодов.
Волоконно-оптический гироскоп (далее по тексту - ВОГ) содержит в своем составе оптический блок, который представляет собой волоконный кольцевой интерферометр (ВКИ) и электронный блок обработки информации. Оптический блок содержит источник оптического излучения, волоконный делитель мощности излучения, интегрально-оптическую схему (далее по тексту - ИОС), многовитковую чувствительную катушку и фотоприемник. ИОС содержит в своем составе Y-делитель мощности оптического излучения на основе поляризующих канальных волноводов и фазовый модулятор, располагающийся на выходных плечах Y-делителя. Канальные волноводы Y-делителя сформированы в подложке ниобата лития по протонно-обменной технологии, которая позволяет приобретать волноводам поляризующие свойства. На выходных канальных волноводах располагается фазовый модулятор оптических лучей, проходящих по канальным волноводам. Фазовый модулятор представляет собой металлические электроды, нанесенные по обе стороны канальных волноводов. При подаче на электроды электрического напряжения за счет электрооптического эффекта в материале канальных волноводов изменяется показатель преломления, что приводит к эффекту фазовой модуляции оптических лучей, распространяющихся по канальным волноводам. К выходным волноводам Y-делителя пристыкованы концы световодов чувствительной катушки гироскопа.
На фотоприемнике ВКИ наблюдается интерференционная картина, образованная двумя оптическими лучами, прошедшими чувствительную катушку гироскопа в двух взаимно противоположных направлениях. При вращении кольцевого интерферометра между этими двумя лучами вследствие эффекта Саньяка возникает разность фаз, которая выражается следующим образом:
Фс=[4πRL/λc]×Ω,
где R - радиус чувствительной катушки гироскопа;
L - длина световода катушки;
λ - центральная длина волны излучения источника;
с - скорость света в вакууме;
Ω - угловая скорость вращения гироскопа.
Таким образом, на фотоприемнике мощность оптического излучения можно представить в виде:
 ,
,
где Р0 - мощность интерферирующих на фотоприемнике лучей.
Для повышения чувствительности ВОГ вблизи нулевых угловых скоростей используется вспомогательная фазовая модуляция. Для достижения эффекта фазовой модуляции лучей в кольцевом интерферометре с помощью фазового модулятора ИОС используется временное запаздывание интерферирующих на фотоприемнике фронтов лучей при прохождении фазового модулятора ИОС. Это временное запаздывание равно времени пробега световых лучей ВКИ по световоду чувствительной катушки и составляет величину:
 ,
,
где n0 - показатель преломления материала световода чувствительной катушки.
При подаче на фазовый модулятор импульсов напряжения, следующих с частотой 1/2τ и вносящих разность фаз между лучами ВКИ в виде импульсной последовательности с амплитудами ±π/2 радиан и ±3π/2 радиан [1,2], ток фотоприемника можно представить в виде:
 ,
,
где ηф - токовая чувствительность фотоприемника.
Далее сигнал с фотоприемника поступает на вход усилителя тока фотоприемника, на выходе которого присутствует напряжение, пропорциональное величине:
 ,
,
где Rн - сопротивление нагрузки усилителя тока фотоприемника.
В работе [1] предложен способ линеаризации выходной характеристики ВОГ. На фазовый модулятор одновременно с напряжением вспомогательной фазовой модуляции (ВФМ) подается ступенчатое пилообразное напряжение для компенсации разности фаз Саньяка. Работа ВОГ подробно описана в [2]. С помощью пилообразного напряжения, подаваемого на фазовый модулятор, вносится управляемая разность фаз между лучами ВКИ, с помощью которой осуществляется компенсация разности фаз Санька. С этой целью организуется закрытый контур обратной связи (ВОГ с закрытым контуром обратной связи ОС-1) по обнулению сигнала на выходе синхронного детектора (демодулятора) СВ гироскопа. Сигнал на выходе синхронного детектора автоматически обнуляется за счет подбора величины ступеньки напряжения пилообразного ступенчатого напряжения (СПН). За счет этого выходная характеристика ВОГ становится линейной. Сигнал на выходе усилителя тока фотоприемника в этом случае можно представить в виде:
 ,
,
где Ψк - регулируемая разность фаз, которая вносится между лучами ВКИ с помощью СПН при подаче его на фазовый модулятор.
Для частоты СПН в этом случае справедливо следующее соотношение:
 ,
,
где η - эффективность фазового модулятора, Uп - амплитуда напряжения СПН;
τст - длительность ступеньки СПН, Ω(t) - угловая скорость вращения.
Масштабный коэффициент ВОГ стабилизируется за счет обеспечения амплитуды СПН, которая при подаче на фазовый модулятор изменяет фазу лучей ВКИ на 2π радиан. Амплитуда СПН регулируется путем выделения импульса засветки фотоприемника при сбросе напряжения СПН и последующего его обнуления путем регулировки амплитуды СПН (контур обратной связи ОС-2). В этом случае для частоты СПН справедливо следующее соотношение:
fn(t)=[2R/λn0]×Ω(t)
Таким образом, масштабный коэффициент ВОГ не зависит от эффективности фазового модулятора, которая имеет большую нестабильность при воздействии внешних дестабилизирующих факторов.
Известен ВОГ, в котором для стабилизации масштабного коэффициента [3, 4, 5] вспомогательная фазовая модуляция (ВФМ) с амплитудами ±(π±Δ) радиан, Δ=π/2n, где n=1,2,3… Сигнал вращения (СВ) в режиме разомкнутого контура ОС-1 на фотоприемнике в этом случае можно представить в виде:
 .
.
Сигнал на фотоприемнике содержит СВ, сигнал рассогласования (CP) и постоянную составляющую СВ и СР. СВ имеет период, равный 6τ-интервалов, где τ - время пробега оптических лучей по световоду чувствительной катушки. CP имеет период, равный 3τ - интервалам. Сигнал с фотоприемника поступает на вход аналоговой части блока сервисной электроники ВОГ, то есть на вход дифференциального усилителя тока фотоприемника. Аналоговая часть электроники содержит также интегратор, с помощью которого компенсируется постоянная составляющая сигнала на выходе дифференциального усилителя тока фотоприемника [6]. Это необходимо для обеспечения большого коэффициента усиления СВ и СР. При наличии постоянной составляющей СВ и CP усилитель будет находиться в насыщении, что не позволит получать информацию об амплитуде СВ и СР. Далее с выхода усилителя СВ и CP поступают на вход цифроаналогового преобразователя и далее с его выхода на вход цифрового блока. Цифровой блок представляет собой либо микропроцессор, либо программируемую логическую интегральную схему (ПЛИС). Таким образом, на вход АЦП поступают в чистом виде СВ и СР. CP образуется на фотоприемнике при изменении эффективности фазовой модуляции ИОС при воздействии на нее внешних дестабилизирующих факторов, например температуры окружающей среды. Наличие CP свидетельствует об изменении масштабного коэффициента ВОГ при воздействии внешних дестабилизирующих факторов. Для осуществления ВФМ в цифровом блоке формируются коды напряжения ВФМ (генератор ВФМ), а также коды ступенчатого пилообразного напряжения (генератор СПН) для компенсации разности фаз Саньяка. Коды напряжения ВФМ и СПН с выхода цифрового блока поступают на вход цифроаналогового преобразователя (ЦАП), после которого объединенный сигнал напряжения ВФМ и СПН поступает на вход аналоговых усилителей и далее с их выхода на электроды фазовых модуляторов ИОС. В цифровом блоке сформирован первый детектор СВ и второй детектор для выделения СР. С помощью контура ОС-1, в состав которого входит первый детектор, генератор СПН и регулятор величины ступеньки СПН, с помощью подачи на фазовые модуляторы ИОС напряжения ВФМ и СПН производится компенсация разности фаз Саньяка с целью линеаризации выходной характеристики ВОГ. В цифровом блоке также сформирован и контур ОС-2, в состав которого входит второй детектор и регулятор амплитуды напряжения ВФМ, подаваемого на электроды фазового модулятора ИОС. С помощью изменения амплитуды напряжения ВФМ CP на выходе второго детектора поддерживается равным нулю и тем самым обеспечивается стабильность масштабного коэффициента ВОГ при изменении эффективности фазовых модуляторов ИОС.
Недостатком известных схем электронного блока является низкое быстродействие аналоговых интеграторов, с помощью которых производится компенсация постоянной составляющей СВ и СР. Низкое быстродействие компенсации понижает точность волоконно-оптического гироскопа при воздействии вибраций из-за смещения нулевого сигнала при изменении амплитуды СВ и СР. Амплитуда CP и CP может изменяться при изменении выходной мощности источника излучения, при изменении коэффициента передачи электронного тракта (изменяется ширина полосы контура ОС-1), а также при воздействии вибрационных нагрузок, которые приводят к модуляции на частоте вибраций амплитуд СВ, CP и их постоянной составляющей, разности фаз лучей в ВКИ, ширины полосы контура ОС-1. Наложение друг на друга модуляции указанных выше оптических и электрических параметров сигнала приводит к смещению нулевого сигнала ВОГ и изменению его масштабного коэффициента при изменении частоты вибраций и ее амплитуды.
Целью настоящего изобретения является повышение точности волоконно-оптического гироскопа при воздействии вибраций.
1. Указанная цель достигается тем, что в алгоритме обработки информации цифрового блока используют третий контур обратной связи на основе третьего демодулятора, который выделяет постоянную составляющую кода на выходе цифроаналогового преобразователя, причем в состав третьего контура обратной связи также входит ячейка регулируемого кода, который подают на вход второго цифроаналогового преобразователя, далее напряжение с его выхода подают на второй вход дифференциального усилителя, причем с помощью регулятора изменяют код ячейки с целью обнуления кода на выходе третьего демодулятора цифрового блока.
2. Способ повышения точности волоконно-оптического гироскопа по п. 1, отличающийся тем, что в цифровом блоке организуют четвертый контур обратной связи, в состав которого включают схему вычитания кодов и регулятор количества выборок сигналов на первом и втором демодуляторах, при этом на первый вход схемы вычитания подают сигнал с выхода ячейки регулируемого кода, а на второй ее вход подают постоянный код, при этом с помощью регулятора синхронно изменяют количество выборок первого и второго демодуляторов пропорционально коду на выходе схемы вычитания.
3. Способ повышения точности волоконно-оптического гироскопа по п. 2, отличающийся тем, что код на выходе схемы вычитания обнуляют с помощью регулировки коэффициента усиления дифференциального усилителя тока фотоприемника.
4. Способ повышения точности волоконно-оптического гироскопа по п. 2, отличающийся тем, что код на выходе схемы вычитания обнуляют с помощью изменения выходной мощности источника излучения.
5. Способ повышения точности волоконно-оптического гироскопа по п. 1, отличающийся тем, что в цифровом блоке коды с выхода первого и второго демодуляторов поступают на первые входы первой и второй схемы деления кодов соответственно, при этом вторые их входы соединяют с выходом ячейки регулируемого входа.
Повышение точности волоконно-оптического гироскопа при воздействии вибраций достигается за счет повышения быстродействия компенсации постоянной составляющей СВ и CP путем использования цифрового контура обратной связи (контур ОС-3). Повышение точности гироскопа также достигается за счет стабилизации амплитуд CP и СВ с помощью дополнительных быстродействующих контуров обратной связи, организованных в цифровой части электронной схемы ВОГ.
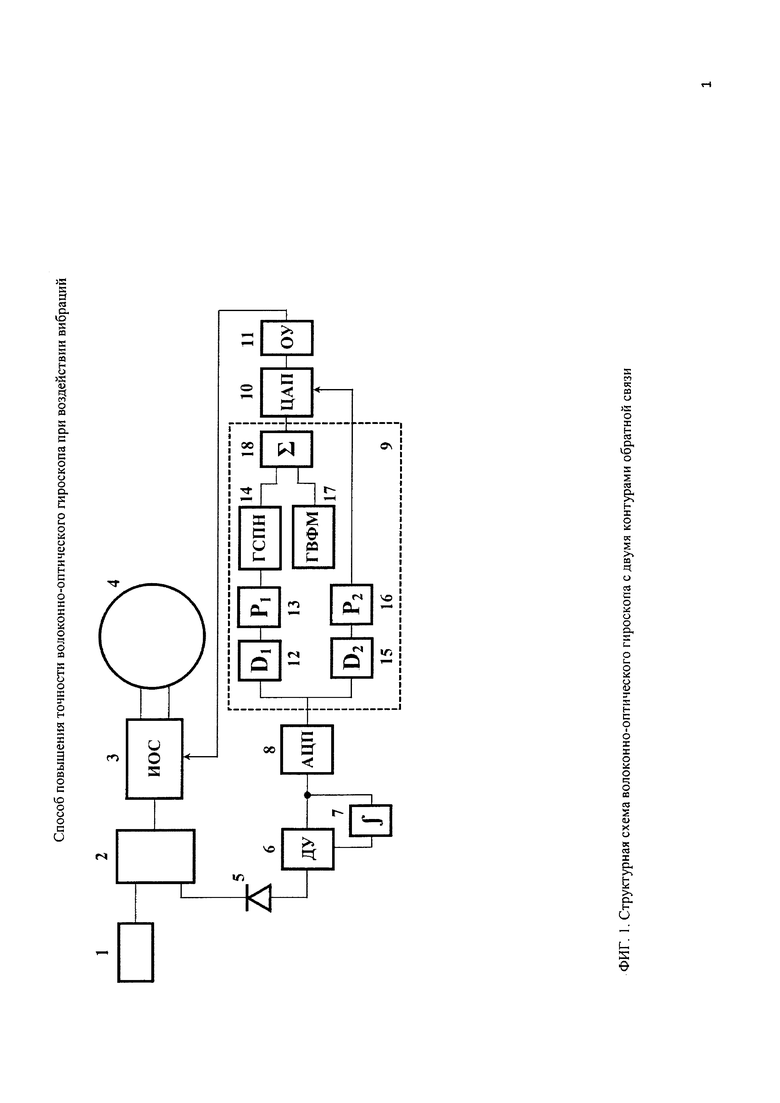
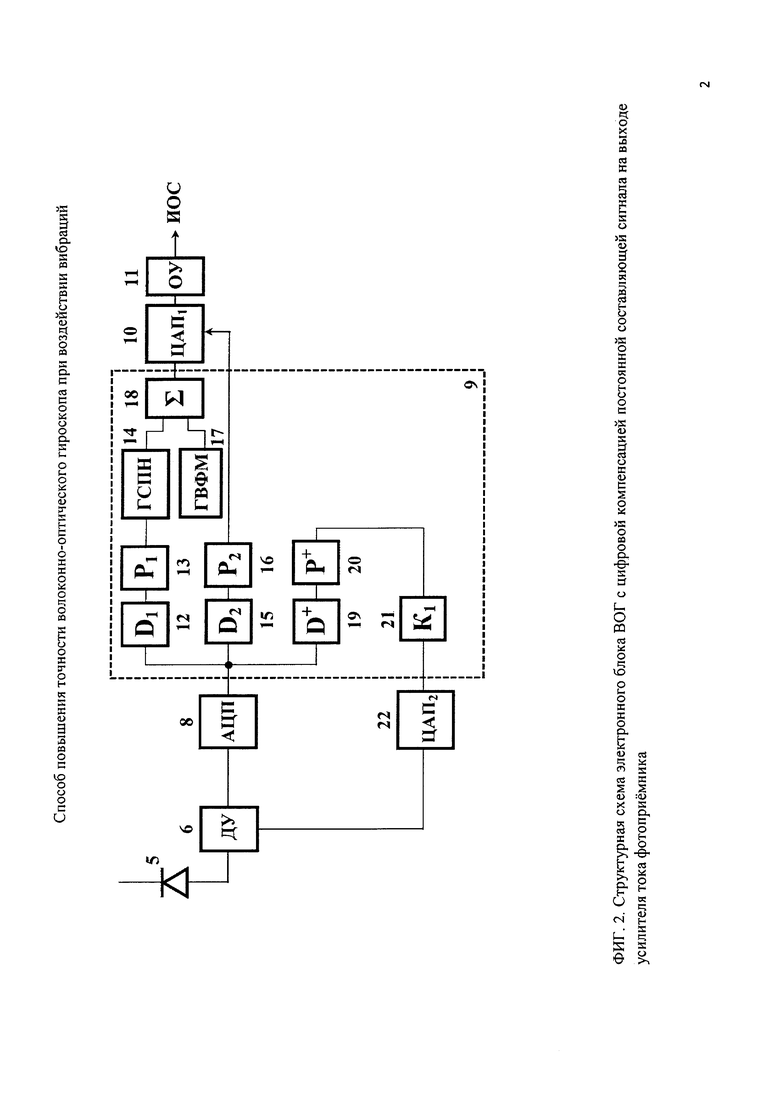
Сущность изобретения поясняется чертежами. На Фиг. 1 показана структурная схема волоконно-оптического гироскопа с двумя контурами обратной связи. На Фиг. 2 показана структурная схема электронного блока ВОГ с цифровой компенсацией постоянной составляющей сигнала на выходе усилителя тока фотоприемника. На Фиг. 3 показана структурная схема электронного блока ВОГ со стабилизацией амплитуды сигналов вращения и рассогласования за счет изменения количества выборок АЦП при их демодуляции. На Фиг. 4 показана структурная схема электронного блока ВОГ со стабилизацией сигналов вращения и рассогласования за счет изменения коэффициента усиления усилителя тока фотоприемника. На Фиг. 5 показана структурная схема электронного блока ВОГ со стабилизацией сигналов вращения и рассогласования за счет изменения выходной мощности источника излучения. На Фиг. 6 показана структурная схема электронного блока ВОГ со стабилизацией амплитуды сигналов вращения и рассогласования за счет использования схемы деления.
На Фиг. 1 показана структурная схема волоконно-оптического гироскопа (ВОГ) с двумя контурами обратной связи. ВОГ состоит из волоконного кольцевого интерферометра (ВКИ) и электронного блока (ЭБ) обработки информации, поступающей С ВКИ. ВКИ содержит источник оптического излучения 1, волоконный делитель оптических лучей 2, интегрально-оптическую схему (ИОС) 3, волоконную чувствительную катушку 4 и фотоприемник 5. ЭБ состоит из аналоговой части и цифрового блока. Аналоговая часть ЭБ содержит дифференциальный усилитель тока фотоприемника 6, фильтр низких частот (интегратор) 7 для компенсации постоянной составляющей СВ и CP на выходе усилителя тока фотоприемника [6]. Для увеличения амплитуды СВ и CP усилитель должен иметь большой коэффициент усиления, а так как постоянная составляющая СВ и CP имеет значительно большую величину, поэтому, если ее не скомпенсировать на выходе усилителя, то он будет постоянно находиться в насыщении. Далее СВ и CP поступают на вход аналого-цифрового преобразователя 7 (АЦП). Сигнал с выхода АЦП поступает на вход цифрового блока 9. В качестве цифрового блока (ЦБ) может использоваться как микропроцессор, так и программируемая логическая интегральная схема (ПЛИС). С выхода ЦБ сигналы поступают на вход первого цифроаналогового преобразователя 10 (ЦАП1) и на операционный усилитель 11. Напряжение с выхода усилителя подается на электроды фазовых модуляторов ИОС. В ЦБ сформирован демодулятор СВ 12, на выходе которого присутствует разность между суммой выборок АЦП в первый полупериод СВ и суммой выборок во второй полупериод СВ. Таким образом, на выходе демодулятора СВ выделяется код, пропорциональный удвоенной амплитуде СВ. Далее код с выхода демодулятора СВ поступает на вход регулятора (Р1) 13, который изменяет величину ступеньки ступенчатого пилообразного напряжения (СПН), который вырабатывается генератором (ГСПН) 14. Код CP с выхода АЦП также поступает на вход демодулятора CP 15, на выходе которого также выделяется код, пропорциональный удвоенной амплитуде СР. Далее этот код с выхода демодулятора CP поступает на вход регулятора (Р2) 16. В ЦБ формируется также генератор напряжения вспомогательной фазовой модуляции 17 (ГВФМ) [4, 5]. Коды СПН и напряжения ВФМ поступают на вход сумматора 18 и далее на вход ЦАП1. Таким образом, на выходе ЦАП1 присутствует СПН и напряжение ВФМ, которые затем подаются через операционный усилитель на электроды фазовых модуляторов ИОС. Амплитуда-напряжение с выхода операционного усилителя регулируется с помощью Р2 путем изменения опорного тока ЦАП1 с помощью, например, сигнала с широтно-импульсной модуляцией (ШИМ-сигнала). Код сигнала на выходе демодулятора СВ обнуляется путем регулировки с помощью Р1 величины ступеньки СПН и таким образом образуется первый контур обратной связи (контур ОС-1), с помощью которого осуществляется линеаризация выходной характеристики ВОГ. Код на выходе демодулятора CP обнуляется с помощью Р2 путем изменения опорного тока ЦАП1 и таким образом образуется второй контур обратной связи (контур ОС-2), с помощью которого осуществляется стабилизация масштабного коэффициента ВОГ при изменении эффективности фазовых модуляторов ИОС при воздействии на них внешних дестабилизирующих факторов.
На Фиг. 2 показана структурная схема электронного блока ВОГ с цифровой компенсацией постоянной составляющей сигнала на выходе усилителя тока фотоприемника. Для компенсации постоянной составляющей в ЦБ формируется третий демодулятор 19 для выделения постоянной составляющей сигнала на выходе АЦП. Демодулятор осуществляет сложение выборок сигнала на выходе АЦП на одном периоде СВ. Количество выборок сигнала на каждом полупериоде СВ равно количеству выборок при выделении сигнала, пропорционального амплитуде СВ, первым демодулятором. При работе контуров ОС-1 и ОС-2 сумма выборок на каждом полупериоде СВ пропорциональна постоянной составляющей сигнала на выходе АЦП. Код с выхода третьего демодулятора поступает на вход регулятора Р+ 20, который изменяет код ячейки 21. Регулируемый код ячейки поступает на вход цифроаналогового преобразователя (ЦАП2) 22, напряжение с выхода которого подается на второй вход дифференциального усилителя тока фотоприемника. Таким образом, для компенсации постоянной составляющей на выходе дифференциального усилителя тока фотоприемника организуется третий контур обратной связи (контур ОС-3). Контур ОС-3 значительно увеличивает быстродействие компенсации постоянной составляющей на выходе усилителя тока фотоприемника за счет цифровой обработки информации по сравнению со схемой (Фиг. 1), в которой используется аналоговый интегратор [6]. При наличии постоянной составляющей на выходе АЦП и при ее изменении появляется паразитный сигнал на частоте СВ, который выделяется первым демодулятором и таким образом возникает паразитное смещение нулевого сигнала ВОГ. Для исключения ошибок подобного рода необходимо повышать быстродействие компенсации постоянной составляющей. Постоянная времени контура ОС-3 должна быть меньше 1/fCB, где fСВ - частота СВ.
ВКИ ВОГ может иметь при отсутствии вращения паразитную разность фаз Δϕп. Паразитная разность фаз может быть вызвана неидеальностью характеристик оптических компонентов схемы. Паразитная разность фаз может быть вызвана, например, разъюстировкой осей двулучепреломления световода чувствительной катушки и осями пропускания канальных волноводов ИОС, эффектом Шьюппа в чувствительной катушке и т.д. В этом случае уравнение компенсации разности фаз Саньяка Фс фазовыми модуляторами ИОС при подаче на них СПН может быть записано в виде:
Ψк=Фс-Δϕп/АСВ,
где АСВ - амплитуда СВ;
Ψк - разность фаз, вносимая фазовыми модуляторами ИОС при подаче на них СПН с целью компенсации разности фаз Саньяка. Как видно из приведенного соотношения компенсационная разность фаз ψк определяет разность фаз с ошибкой, которая определяется как величиной паразитной разности фаз в ВКИ, так и амплитудой СВ.
Из приведенного соотношения следует, что при наличии в ВКИ ВОГ паразитной разности фаз возникает паразитное смещение нулевого сигнала ВОГ и оно зависит от амплитуды СВ. Для исключения смещения нулевого сигнала в этом случае необходимо как минимизировать паразитную разность фаз в ВКИ ВОГ, так и обеспечить стабильность амплитуды СВ. Смещение нулевого сигнала может также возникать и из-за воздействия на ВОГ вибрационных и акустических нагрузок [7, 8]. При воздействии вибрации в ВКИ ВОГ возникает модуляция разности фаз на частоте вибрации, а также модуляция амплитуды СВ на той же частоте. В результате наложения друг на друга промодулированных на частоте вибрации этих величин возникает паразитное смещение нулевого сигнала ВОГ, которое пропорционально амплитудам изменения этих величин. Для исключения паразитного смещения нулевого сигнала ВОГ при воздействии вибрационных нагрузок необходимо исключить модуляцию либо разности фаз в ВКИ, либо модуляцию амплитуды СВ.
При работе контура ОС-2 также может возникать ошибка в измерении угловой скорости из-за изменений масштабного коэффициента ВОГ. Условием стабилизации масштабного коэффициента является обнуление CP на выходе второго демодулятора контуром ОС-2. Но из-за паразитных эффектов в фазовых модуляторах на выходе второго демодулятора может возникать паразитное смещение γп из-за ложного СР. Ложный CP может возникать при сужении полосы пропускания фазовых модуляторов, например при воздействии влаги [4]. Для изменения эффективности фазовых модуляторов ИОС справедливо следующее соотношение:
Δη=η0×ΔU/UСПН-γп/AСРUСПН,
где Δη - изменение эффективности фазовых модуляторов ИОС, которое приводит к образованию CP на выходе второго демодулятора;
UСПН - амплитуда напряжения СПН;
ΔU - изменение напряжения на фазовых модуляторах ИОС для компенсации изменений их эффективности Δη;
АСР - амплитуда СР.
Из приведенного соотношения следует, что при наличии ложного CP на выходе второго демодулятора возникает изменение масштабного коэффициента ВОГ. Изменение масштабного коэффициента зависит как от паразитного смещения γп на выходе второго демодулятора, так и от изменений амплитуды СР. Для повышения точности ВОГ необходимо стремиться к устранению ложного CP и к стабилизации амплитуды СР.
Паразитное смещение нулевого сигнала ВОГ может быть вызвано также и воздействием вибрационных нагрузок [7, 8]. Данный вид ошибки ВОГ обусловлен следующими физическими явлениями при воздействии вибраций: модуляцией на частоте вибрации разности фаз в чувствительной катушке, модуляцией оптических потерь в оптических компонентах схемы ВКИ и модуляцией полосы обработки контура ОС-1. Модуляция оптических потерь в оптических компонентах схемы приводит к модуляции амплитуд СВ и CP, а также к их постоянной составляющей. В связи с этим следует рассматривать три вида процессов, которые приводят к паразитному смещению нулевого сигнала ВОГ при воздействии вибраций. Первый вид ошибки возникает из-за наложения друг на друга модуляций амплитуд СВ и CP и модуляции разности фаз лучей ВКИ [7]. Второй тип ошибки вызывается модуляцией постоянной составляющей СВ и CP и, как следствие, модуляцией амплитуд СВ и CP на частоте вибрации [8]. Эти два вида ошибок могут быть исключены при обеспечении стабильности амплитуд СВ и CP в условиях воздействия вибраций.
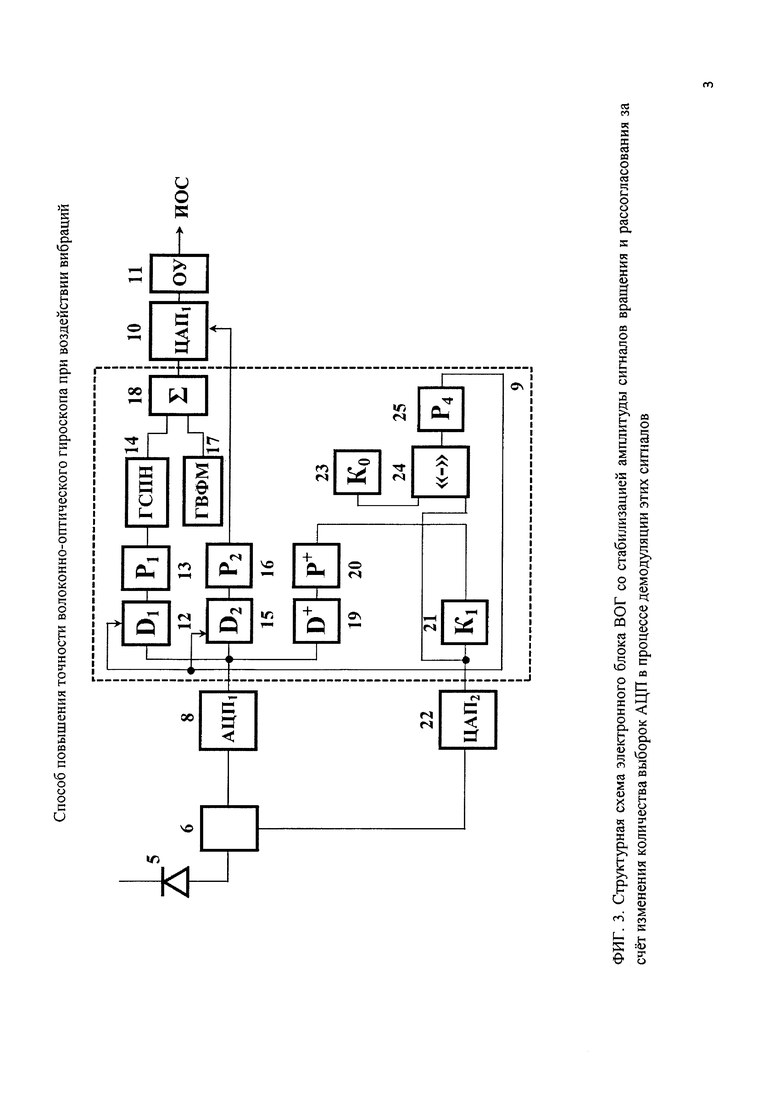
На Фиг. 3 показана структурная схема электронного блока ВОГ со стабилизацией амплитуды сигналов вращения и рассогласования за счет изменения количества выборок АЦП при их демодуляции. Стабилизация амплитуд СВ и CP осуществляется с помощью четвертого контура обратной связи, организованного в ЦБ. В состав четвертого контура обратной связи ОС-4 входит ячейка постоянного кода 23, схема вычитания 24 и регулятор количества выборок демодуляторов СВ и СР. На первый вход схемы вычитания подается сигнал с выхода ячейки постоянного кода, а на второй ее вход подается сигнал с выхода ячейки регулируемого кода. Разностный код на выходе схемы вычитания поступает на вход регулятора Р4. Регулятор Р4 изменяет синхронно количество выборок демодуляторов СВ (D1) и CP (D2) пропорционально коду на выходе схемы вычитания. Контур ОС-4 обладает достаточным быстродействием для того, чтобы обеспечить стабилизацию амплитуд СВ и CP даже при воздействии высокочастотной вибрации и акустического шума. Данный алгоритм обработки информации позволяет исключить вибрационные ошибки, а также обеспечить стабильность нулевого сигнала при постоянстве паразитного смещения разности фаз в ВКИ (паразитное смещение на выходе демодулятора СВ) и наличии постоянного ложного сигнала на выходе демодулятора СР. Для ВОГ с длиной световода в катушке порядка 1000 м время пробега лучей составляет τ=5 мкс, при выборе АЦП с частотой выборок 800 МГц на каждом τ-интервале СВ и CP можно иметь до 4000 выборок. При допустимом двухкратном падении амплитуды СВ и CP достаточно использовать 2000 выборок. Стабильность амплитуд СВ и CP за счет регулировки количества выборок в этом случае составит величину 0,05%.
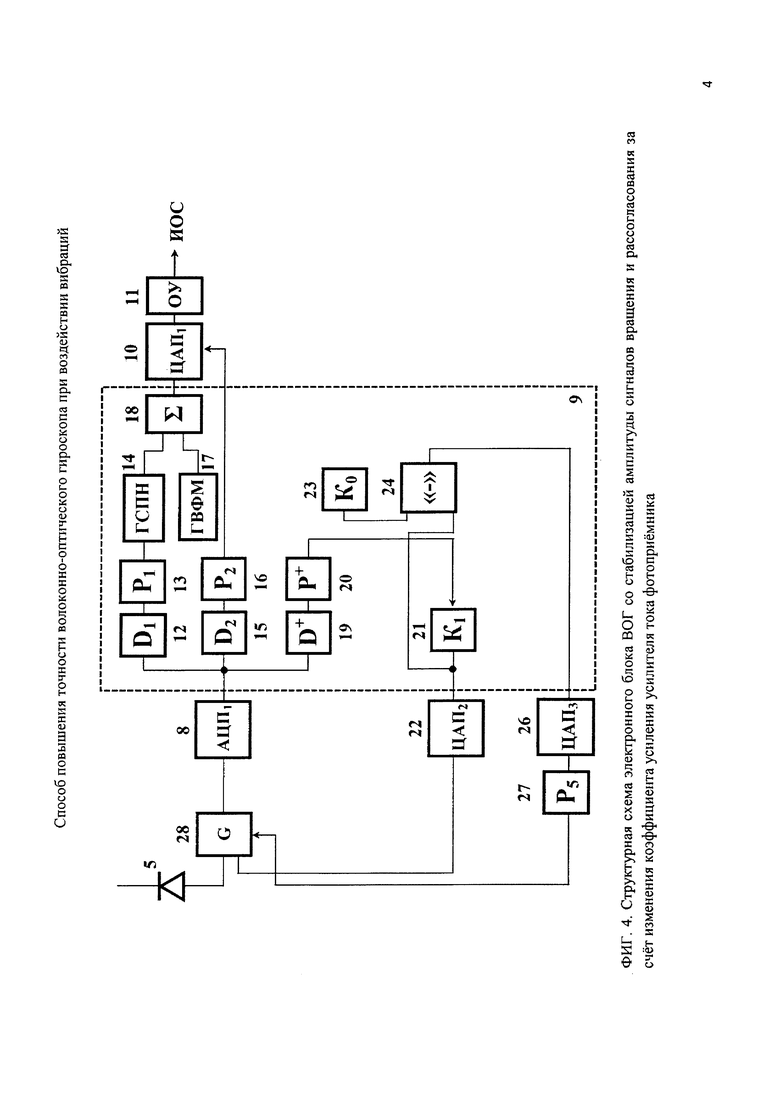
На Фиг. 4 показана структурная схема электронного блока ВОГ со стабилизацией амплитуд сигналов вращения и рассогласования за счет изменения коэффициента усиления усилителя тока фотоприемника. Код с выхода схемы вычитания ЦБ подается на вход третьего цифроаналогового преобразователя 26 (ЦАП3) и далее напряжение подается на вход регулятора 27 (Р5). Регулятор Р5 изменяет коэффициент усиления усилителя тока фотоприемника до тех пор, пока код на выходе схемы вычитания не станет равным нулю. В этом случае обеспечивается стабильность напряжения на входе дифференциального усилителя тока фотоприемника, которое и компенсирует постоянную составляющую СВ и СР. А так как в этом случае обеспечивается стабильность постоянной составляющей СВ и CP, то автоматически обеспечивается стабильность и амплитуды СВ, и СР. Данный алгоритм обработки информации позволяет устранить вибрационные ошибки ВОГ, а также обеспечить стабильность нулевого сигнала при постоянстве паразитного смещения разности фаз в ВКИ (паразитное смещение на выходе демодулятора СВ) и наличии постоянного ложного сигнала на выходе демодулятора СР.
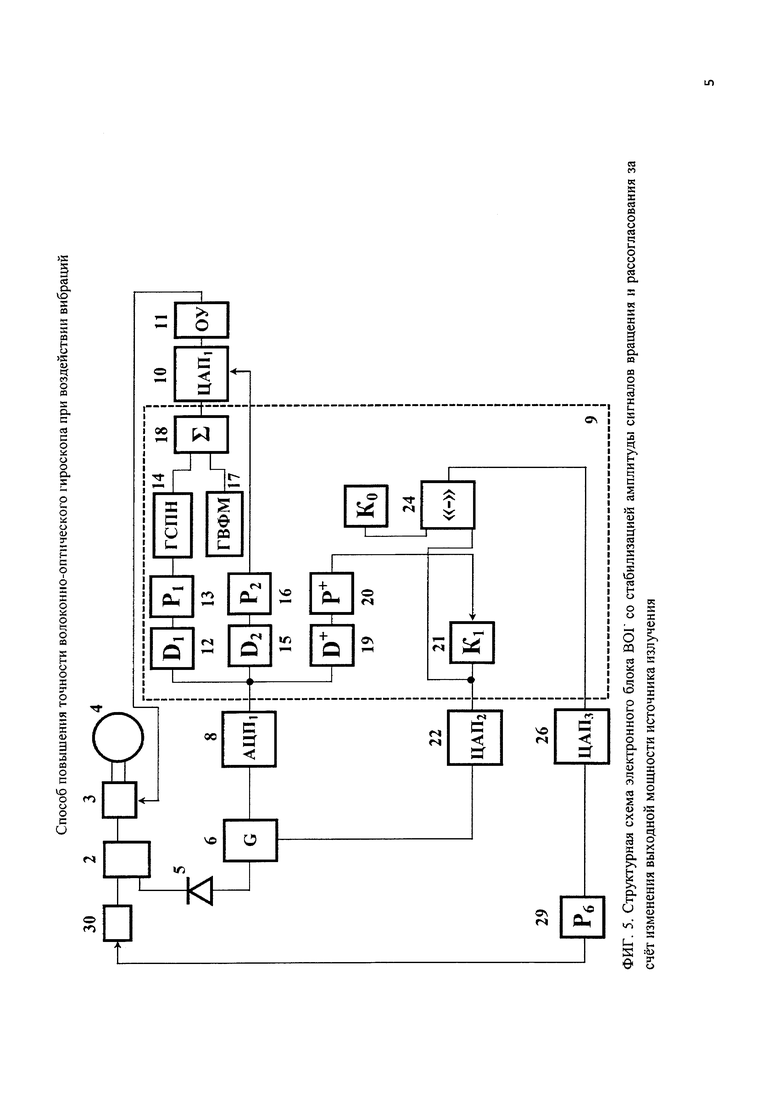
На Фиг. 5 показана структурная схема электронного блока ВОГ со стабилизацией амплитуды сигналов вращения и рассогласования за счет изменения выходной мощности источника излучения. Код с выхода схемы вычитания поступает на вход ЦАП3 и далее на вход регулятора 29 (Р6). В случае использования в качестве источника излучения эрбиевого волоконного источника регулятор Р6 для изменения выходной мощности оптического излучения соответствующим образом изменяет ток диодов накачки источника. Регулятор Р6 управляет выходной мощностью источника излучения до тех пор, пока код на выходе схемы вычитания не станет равным нулю. В этом случае обеспечивается стабильность напряжения на входе дифференциального усилителя тока фотоприемника, которое компенсирует постоянную составляющую СВ и СР. А так как в этом случае обеспечивается стабильность постоянной составляющей СВ и CP, то автоматически обеспечивается и стабильность амплитуды СВ и СР. Данный алгоритм обработки информации позволяет устранить вибрационные ошибки ВОГ, а также обеспечить стабильность нулевого сигнала при постоянстве паразитного смещения разности фаз в ВКИ (паразитное смещение на выходе демодулятора СВ) и наличии постоянного ложного сигнала на выходе демодулятора СР.
Для устранения негативного воздействия на точность ВОГ вибраций можно воспользоваться для устранения изменений амплитуды СВ и CP процедурой деления амплитуды этих сигналов на их постоянную составляющую, так как они жестко связаны между собой. Сигнал на фотоприемнике можно представить в виде, который приведен выше:
 .
.
Здесь приведены выражения для амплитуды СВ и его постоянной составляющей. Для получения стабильной амплитуды СВ необходимо выполнить операцию деления амплитуды СВ на постоянную составляющую СВ. В этом случае выражение для сигнала, зависящего от угловой скорости, можно представить в виде:
AΩ=ctgΔ×sinФс
Величина Δ стабилизируется за счет работы контура ОС-2 и, таким образом, амплитуда СВ при выполнении операции деления становится независимой от изменений оптических потерь излучения в элементах схемы ВКИ, что в свою очередь приводит к стабилизации полосы пропускания контура ОС-1 и отсутствию паразитного смещения нулевого сигнала ВОГ при воздействии вибраций. При выполнении операции деления амплитуды CP на его постоянную составляющую амплитуда CP также становится независимой от изменений оптической мощности лучей ВКИ при воздействии вибраций, что приводит к стабилизации полосы пропускания контура ОС-2 и, как следствие, к отсутствию паразитных изменений масштабного коэффициента ВОГ. Для устранения влияния вибраций на точность ВОГ из-за изменений паразитного смещения нулевого сигнала и его масштабного коэффициента необходимо восстановить структуру сигнала на фотоприемнике (СВ, CP и их постоянную составляющую) в цифровом виде в ЦБ электронного блока ВОГ, после чего выполнить необходимые операции деления кодов соответствующих сигналов в цифровом виде. Операции деления кодов в ЦБ ВОГ обеспечит необходимое быстродействие операций для эффективного подавления негативного влияния на точность ВОГ вибрационных нагрузок.
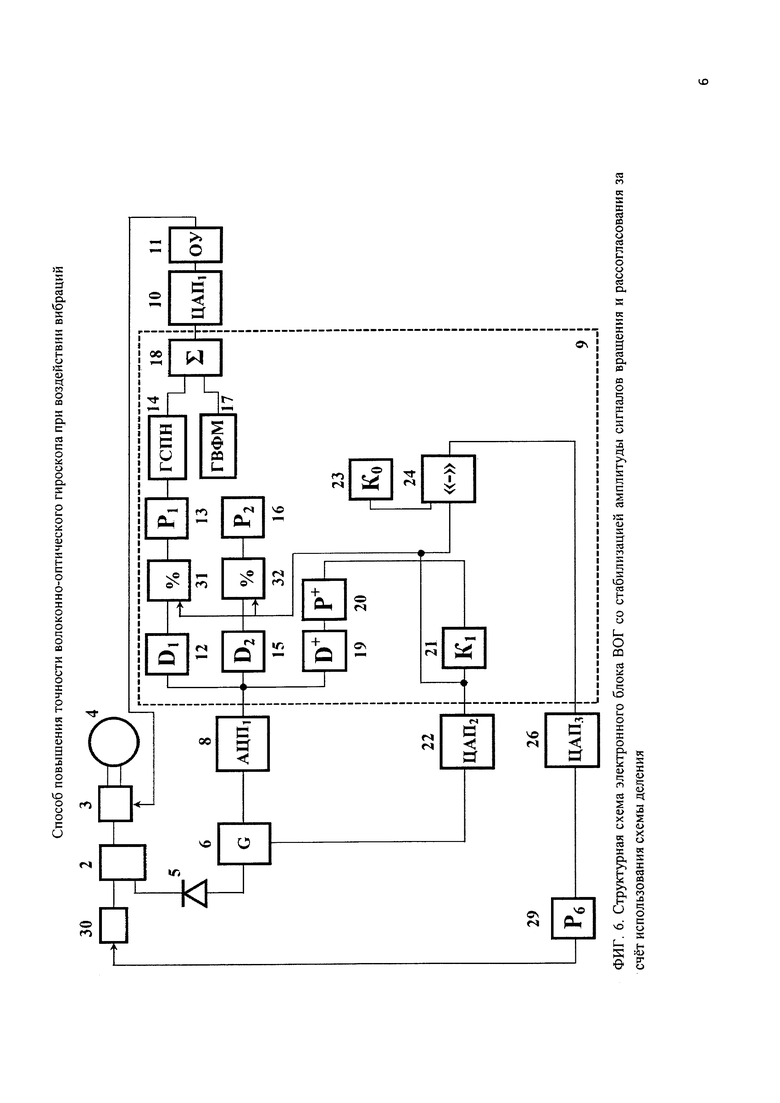
На Фиг. 6 показана структурная схема электронного блока ВОГ со стабилизацией амплитуды сигналов вращения и рассогласования за счет использования схемы деления. Код с выхода ячейки управляемого кода поступает на первые входы схемы деления кодов 31, 32, а на вторые их входы поступают коды с выходов первого D1 и второго D2 демодуляторов СВ и CP соответственно. Данный алгоритм обработки информации вместе со стабилизацией постоянной составляющей сигнала на фотоприемнике с помощью, например, регулировки выходной мощности источника излучения позволяет устранить вибрационные ошибки ВОГ.
Литература
[1] Lefevre Н.С. et all. «Double closed-loop hybrid fiber gyroscope using digital phase ramp // Optical Fiber Sensors (OFS), 1985, San Diego, CA, January 1, Post Deadline, p. PDS7-1.
[2] Pavlath, G. A. Closed-loop fiber optic gyros // Proc. SPIE. 1996. v. 2837. p. 46.
[3] A.M. Курбатов, P.A. Курбатов. «Пути повышения точности волоконно-оптических гироскопов» «Гироскопия и Навигация» УДК 531.383 №1(76). 2012, стр. 102÷121.
[4] А.М. Курбатов. «О новых путях совершенствования волоконно-оптических гироскопов с открытым и закрытым контуром обратной связи». «Гироскопия и навигация», №1 (88), 2015.
[5] А.М. Курбатов, Р.А. Курбатов. «Волоконно-оптический гироскоп с закрытым контуром». Патент РФ №2512599 от 28.02.2014 г., дата приоритета 24.10.2012 г.
[6] Sanders G., Dankwort R., Kaliszek A. et al. Fiber optic gyroscope vibration error compensator. US Patent №5,923,424, 1999.
[7] Greening Т. Digital intensity suppression for vibration and radiation insensitivity in a fiber optic gyroscope. US Patent №2008/0079946, 2008.
[8] Курбатов A.M., Курбатов P.А. «Вибрационная ошибка угловой скорости волоконно-оптического гироскопа и методы ее подавления». Радиотехника и электроника. Т. 58, №7, стр. 842-850, 2013.
Изобретение относится к области волоконной оптики. Способ повышения точности волоконно-оптического гироскопа, содержащего источник оптического излучения, делитель оптического луча, интегрально-оптическую схему, чувствительную катушку, фотоприемник, дифференциальный усилитель тока, фильтр для компенсации постоянной составляющей тока, АЦП, цифровой блок, ЦАП и операционный усилитель напряжения, заключается в том, что в цифровом блоке сформирован генератор кода напряжения вспомогательной фазовой модуляции и организованы первый контур и второй контур обратной связи, включающие в свой состав демодулятор сигнала вращения, первый регулятор и генератор ступенчатого пилообразного напряжения, второй демодулятор сигнала рассогласования, второй регулятор, изменяющий опорный ток ЦАП. В алгоритме обработки информации цифрового блока используют третий контур обратной связи на основе третьего демодулятора. В состав третьего контура обратной связи входит ячейка регулируемого кода, подающегося на вход второго ЦАП. Напряжение с выхода ЦАП подают на второй вход дифференциального усилителя, изменяя код ячейки с помощью регулятора с целью обнуления кода на выходе третьего демодулятора. Технический результат заключается в повышении точности волоконно-оптического гироскопа при воздействии вибрации. 4 з.п. ф-лы, 6 ил.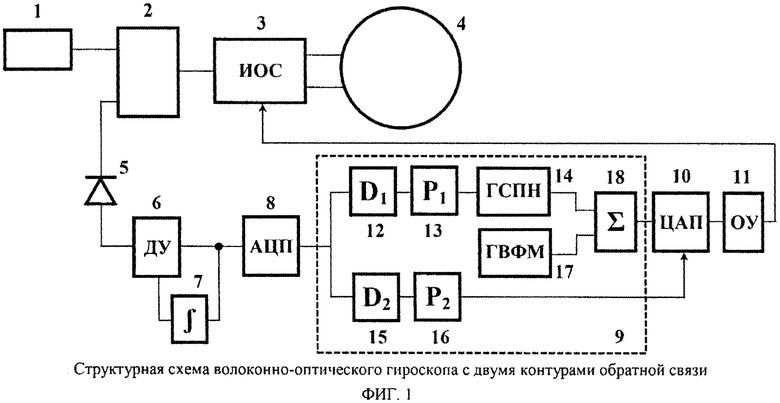
1.Способ повышения точности волоконно-оптического гироскопа при воздействии вибраций, содержащего источник оптического излучения, делитель оптического луча, интегрально-оптическую схему, чувствительную катушку, фотоприемник, дифференциальный усилитель тока фотоприемника, фильтр для компенсации постоянной составляющей тока фотоприемника на выходе дифференциального усилителя, аналого-цифровой преобразователь, цифровой блок, цифроаналоговый преобразователь и операционный усилитель напряжения, выход которого соединен с фазовыми модуляторами интегрально-оптической схемы, при этом в цифровом блоке сформирован генератор кода напряжения вспомогательной фазовой модуляции и организованы первый контур обратной связи для линеаризации выходной характеристики, включающий в свой состав демодулятор сигнала вращения, первый регулятор и генератор ступенчатого пилообразного напряжения и второй контур обратной связи для стабилизации масштабного коэффициента гироскопа при изменении эффективности фазовых модуляторов, включающий в свой состав второй демодулятор сигнала рассогласования, второй регулятор, который изменяет опорный ток цифроаналогового преобразователя с целью изменения амплитуды вспомогательной фазовой модуляции, отличающийся тем, что в алгоритме обработки информации цифрового блока используют третий контур обратной связи на основе третьего демодулятора, который выделяет постоянную составляющую кода на выходе цифро-аналогового преобразователя, причем в состав третьего контура обратной связи также входит ячейка регулируемого кода, который подают на вход второго цифроаналогового преобразователя, далее напряжение с его выхода подают на второй вход дифференциального усилителя, причем с помощью регулятора изменяют код ячейки с целью обнуления кода на выходе третьего демодулятора цифрового блока.
2. Способ повышения точности волоконно-оптического гироскопа по п. 1, отличающийся тем, что в цифровом блоке организуют четвертый контур обратной связи, в состав которого включают схему вычитания кодов и регулятор количества выборок сигналов на первом и втором демодуляторах, при этом на первый вход схемы вычитания подают сигнал с выхода ячейки регулируемого кода, а на второй ее вход подают постоянный код, при этом с помощью регулятора синхронно изменяют количество выборок первого и второго демодуляторов пропорционально коду на выходе схемы вычитания.
3. Способ повышения точности волоконно-оптического гироскопа по п. 2, отличающийся тем, что код на выходе схемы вычитания обнуляют с помощью регулировки коэффициента усиления дифференциального усилителя тока фотоприемника.
4. Способ повышения точности волоконно-оптического гироскопа по п. 2, отличающийся тем, что код на выходе схемы вычитания обнуляют с помощью изменения выходной мощности источника излучения.
5. Способ повышения точности волоконно-оптического гироскопа по п. 1, отличающийся тем, что в цифровом блоке коды с выхода первого и второго демодуляторов поступают на первые входы первой и второй схемы деления кодов соответственно, при этом вторые их входы соединяют с выходом ячейки регулируемого входа.
| Способ возведения бетонной крепи вертикальных стволов | 1959 |
|
SU126452A1 |
| RU 2012156296 A, 27.06.2014 | |||
| US 0008885170 B2, 11.11.2014 | |||
| US 9140551 B2, 22.09.2015.. | |||

