Уровень техники
Известны проглатываемые датчики, которые могут содержать средство связи малой мощности для передачи сигналов, принимаемых приемником, который пользователь может носить на теле. Традиционные "системы связи с телом" должны быть способны обрабатывать передаваемые с высокой скоростью необработанные данные за установленный период времени с учетом доступной потребляемой мощности и емкости памяти. В традиционном приемнике поступающий сигнал проходит через аналоговые внешние интерфейсные аппаратные средства, содержащие аналоговые фильтры и аналоговые электронные усилители. Аналоговый фильтр обычно имеет широкую полосу пропускания, позволяющую обнаруживать сигналы, передаваемые на всех возможных частотах в соответствии с допустимым отклонением частоты передатчика. Поскольку аналоговые внешние интерфейсные аппаратные средства обеспечивают ограниченную фильтрацию, они пропускают значительное количество шума вместе с желаемым сигналом. После аналогового усиления и фильтрации сигнал оцифровывается аналого-цифровым преобразователем (АЦП). Остальная часть обработки принимаемого сигнала может осуществляться в цифровых аппаратных средствах, таких как встроенный микропроцессор, конечный автомат, логическая вентильная матрица, среди прочих. Оцифрованный сигнал может проходить через один или несколько узкополосных цифровых фильтров с целью максимального удаления шума до попытки его декодировать.
В тех случаях, когда приемник рассчитывает несущую частоту со значительной степенью неопределенности, требуется, чтобы приемник начинал прием через более широкополосный цифровой фильтр и, соответственно, принимал большее количество шума. Большее количество шума означает, что слабый сигнал может быть полностью пропущен. Тем не менее, чтобы отбрасывать большую часть шума, в приемнике может применяться цифровой фильтр с узкой полосой пропускания. Однако, если центр полосы пропускания узкополосного фильтра соответствует неверной несущей частоте, поступающий сигнал может быть полностью пропущен. Соответственно, с целью эффективного обнаружения и декодирования поступающего сигнала, необходимо достичь равновесия между узкополосными фильтрами для удаления максимального числа шума и фильтрами с более широкой полосой пропускания для повышения вероятности того, что несущая частота сигнала будет захвачена, когда приемнику точно неизвестна несущая частота поступающего сигнала. Соответственно, приемник может быть сконфигурирован на итерационную корректировку средней частоты узкополосного фильтра, ее перенос в новое положение и затем еще одну попытку обнаружения. Этот процесс поиска несущей частоты с использованием узкополосного фильтра занимает много времени и является энергоемким. Что важно, для повторной фильтрации на новой средней частоте приемник должен сохранять в памяти копию записи исходных данных или при недоступности исходных данных получать запись совершенно новых данных. Этот процесс требует не только значительных ресурсов памяти (а особенности при использовании АЦП с высокой разрешающей способностью), но также затрат значительного ресурса аккумуляторной батареи устройства всего лишь для идентификации несущей частоты поступающего сигнала.
Сущность изобретения
Согласно первой особенности настоящего изобретения предложен способ по пп. 1-16.
Согласно второй особенности настоящего изобретения предложен приемник сигналов по п.п. 17-34.
Согласно третьей особенности настоящего изобретения предложен способ по пп. 35-39.
Согласно четвертой особенности настоящего изобретения предложен приемник по п.п. 40-44.
Согласно пятой особенности настоящего изобретения предложен способ по пп. 45-52.
Согласно шестой особенности настоящего изобретения предложен способ по пп. 53-61.
Согласно седьмой особенности настоящего изобретения предложен способ по пп. 62-65.
Согласно восьмой особенности настоящего изобретения предложен способ по п.п. 66 и 67.
Согласно девятой особенности настоящего изобретения предложен способ по пп. 68-72.
Согласно десятой особенности настоящего изобретения предложен способ по пп. 73-79.
Согласно одной из дополнительных особенностей настоящего изобретения предложена программа. Такая программа может использоваться как таковая или на программоносителе. Программоносителем может являться среда для записи или другой носитель данных. Передающей средой может являться сигнал.
В одном из вариантов осуществления способ может включать прием и дискретизацию сигнала. В сигнале может быть закодирован пакет данных. Может генерироваться и сохраняться срез, содержащий пару значений для каждого из заданного числа выборок сигнала. Затем может обнаруживаться присутствие пакета данных, и обнаруженный пакет может декодироваться из сохраненных срезов. Выборки сигнала могут представлять корреляцию сигнала с эталонными функциями в приемнике. Генерирование и сохранение срезов может осуществляться по мере дискретизации принимаемого сигнала. Дискретные значения сигнала могут отбрасываться по мере генерирования и сохранения срезов. Представлением сигнала в виде срезов можно манипулировать с целью генерирования фильтров с гибкой полосой пропускания и средней частотой.
В одном из вариантов осуществления способ обнаружения и декодирования сигнала, поступающего в приемник, может начинаться с приема поступающего сигнала приемником, необязательного выполнения какой-либо предварительной аналоговой обработки (например, усиления и фильтрации) в аналоговых внешних интерфейсных аппаратных средствах, после чего может осуществляться дискретизация предварительно обработанных данных в АЦП. Затем в одном из вариантов осуществления дискретные необработанные данные могут сравниваться с внутренними контрольными шаблонами, хранящимися в памяти, с использованием, например, алгоритма корреляции. Один из типичных методов включает корреляцию дискретизированного поступающего сигнала с заданными контрольными шаблонами на протяжении определенного периода времени.
В вариантах осуществления изобретения решены задачи захвата и хранения большого числа поступающих с высокой скоростью дискретизированных сигналов, что создает нагрузку как на вычислительные возможности, так и емкость памяти. Обе эти задачи решены в вариантах осуществления изобретения за счет захвата "срезов". В одном из вариантов осуществления представление данных в виде срезов обеспечивает достаточно информации для эффективного и компактного представления поступающего сигнала и реализации фильтров по большей части с любой полосой пропускания. В одном из вариантов осуществления срезы могут подвергаться операции деформирования, путем которой наборы срезов трансформируются выгодными способами с целью завершения процесса обнаружения. В действительности, в одном из вариантов осуществления срезы могут объединяться с целью создания фильтров с избирательно широкими или узкими полосами пропускания. В вариантах осуществления операция деформирования может быть сконфигурирована на трансформацию срезов, захваченных на одной частоте, в срезы на другой соседней частоте. Эта операция деформирования может осуществляться посредством алгоритма, сконфигурированного на определение несущей частоты поступающего сигнала и обнаружение пакетов данных в зашумленной среде. Представление параметров сигнала в виде срезов в сочетании с функцией деформирования согласно вариантам осуществления обеспечивает новый и эффективный способ выполнения сложных алгоритмов обнаружения с использованием ограниченных ресурсов аппаратных средств и памяти.
Дополнительные признаки настоящего изобретения станут ясны и следующего описания примеров его осуществления со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
На фиг. 1 показаны различные формы сигналов и типичный срез согласно одному из вариантов осуществления, а также система, в которую входит передатчик и приемник, сконфигурированные согласно одному из вариантов осуществления.
На фиг. 2А показана корреляция дискретизированных сигналов двух форм.
На фиг. 2В показан способ расчета одного члена (в данном случае синусоидального члена) согласно одному из вариантов осуществления.
На фиг. 3 показаны особенности способа расчета члена объединенного среза (в данном случае косинусоидального члена) согласно одному из вариантов осуществления.
На фиг. 4 показаны особенности способа объединения синусоидального и косинусоидального членов среза с целью формирования более длинной корреляции согласно одному из вариантов осуществления.
На фиг. 5 показана фаза сигнала, представленного как вращающийся вектор в системе полярных координат.
На фиг. 6А показан вращающийся вектор на опорной частоте в системе полярных координат.
На фиг. 6Б показан вращающийся вектор на опорной частоте и вращающийся вектор сигнала на большей, чем опорная частота, частоте в системе полярных координат.
На фиг. 6В показан вращающийся вектор на опорной частоте и вращающийся вектор сигнала на меньшей, чем опорная частота, частоте в системе полярных координат.
На фиг. 7 показаны особенности деформирования согласно одному из вариантов осуществления.
На фиг. 8 показаны деформированные, совмещенные и готовые к объединению срезы согласно одному из вариантов осуществления.
На фиг. 9 показаны особенности способа поиска несущей частоты и использованием деформирования срезов согласно одному из вариантов осуществления.
На фиг. 10 показаны особенности обнаружения несущей методом частотной манипуляция (ЧМн) согласно одному из вариантов осуществления.
На фиг. 11 показаны особенности обнаружения несущей методом ЧМн с точной настройкой согласно одному из вариантов осуществления.
На фиг. 12 показана логическая блок-схема способа обнаружения сигнала согласно одному из вариантов осуществления.
На фиг. 13 показана логическая блок-схема способа согласно одному из вариантов осуществления.
Подробное описание изобретения
На фиг. 1 показана система согласно одному из вариантов осуществления, в которую входят маломощный передатчик 102 колебательных сигналов и приемник 104. Показано, что передатчик 102 колебательных сигналов и приемник 104 могут быть разделены каналом 103 связи. Например, передатчик 102 колебательных сигналов может находиться внутри проглатываемого датчика, сигналы 105 которого принимает приемник 104, который пользователь может носить на теле, например, на коже 106. В этом случае каналом 103 связи может являться водная среда тела. Приемник 104 может содержать аналоговые внешние интерфейсные аппаратные средства, в которых принимаемый сигнал может подвергаться предварительной обработке до его ввода в АЦП 110, который может генерировать временной ряд выборок необработанных цифровых данных. Выборки могут быть представлены, например, как 1-24 разрядные двоичные числа. Приемник 104 может содержать контроллер 112, который может быть связан с памятью 114. Память 114 может быть сконфигурирована на хранение, как подробно описано далее, данных в виде срезов, контрольных шаблонов и других временных переменных, необходимых контроллеру 112. Приемник также может содержать связной интерфейс (не показанный), позволяющий передавать во внешний мир декодированную полезную нагрузку пакетов, закодированную в принимаемом сигнале.
В одном из вариантов осуществления реализованный в компьютере способ обнаружения и декодирования сигнала, поступающего в приемник 104, может начинаться: с приема поступающего сигнала 105 приемником 104, выполнения какой-либо предварительной аналоговой обработки (например, усиления и фильтрации) в аналоговых внешних интерфейсных аппаратных средствах 108, после чего может осуществляться дискретизация предварительно обработанных данных в АЦП 110. Затем в одном из вариантов осуществления дискретные необработанные данные могут сравниваться контроллером 112 с внутренними контрольными шаблонами, хранящимися в памяти 114, с использованием алгоритма корреляции. Один из методов включает корреляцию дискретизированного поступающего сигнала с заданными контрольными шаблонами на протяжении определенного периода времени.
В вариантах осуществления изобретения решены задачи захвата и хранения большого числа поступающих с высокой скоростью дискретизированных сигналов, что создает нагрузку как на вычислительные возможности, так и емкость памяти. Обе эти задачи решены в вариантах осуществления изобретения за счет захвата "срезов". В одном из вариантов осуществления представление данных в виде срезов обеспечивает достаточно информации для эффективного и компактного представления поступающего сигнала и реализации фильтров по большей части с любой полосой пропускания. В одном из вариантов осуществления срезы могут подвергаться операции деформирования, путем которой наборы срезов трансформируются выгодными способами с целью завершения процесса обнаружения. В действительности, в одном из вариантов осуществления срезы могут объединяться с целью создания фильтров с избирательно широкими или узкими полосами пропускания. В вариантах осуществления операция деформирования может быть сконфигурирована на трансформацию срезов, захваченных на одной частоте, в срезы на другой соседней частоте. Эта операция деформирования может осуществляться посредством алгоритма, сконфигурированного на определение несущей частоты поступающего сигнала и обнаружение пакетов данных в зашумленной среде. Представление параметров сигнала в виде срезов в сочетании с функцией деформирования согласно вариантам осуществления обеспечивает новый и эффективный способ выполнения сложных алгоритмов обнаружения с использованием ограниченных ресурсов аппаратных средств и памяти. Например, для выполнения описанной в изобретении обработки может использоваться одна или несколько программируемых пользователем вентильных матриц (FPGA) или специализированных интегральных схем (ASIC). Также с выгодой может использоваться цифровой процессор сигналов (DSP).
Срез
В одном из вариантов осуществления предложена конструкция среза. Короткие корреляции, достигаемые в результате корреляции относительно короткого участка поступающего сигнала (например, приблизительно 4-8 циклов), именуются срезами. В одном из вариантов осуществления интервал среза может быть охарактеризован как заданный период времени. На фиг. 1 показаны различные сегменты сигнала с частотой 20000 Гц. Позицией 102 обозначен один цикл такого сигнала, период T которого равен 1/20000 Гц или 50 мкс. Позицией 104 обозначен один интервал среза, равный 4 циклам сигнала с частотой 20000 Гц или 200 мкс. В данном случае интервал среза произвольно принят за 4 цикла поступающего сигнала. Тем не менее, интервал среза может соответствовать другому временному интервалу или числу циклов. Например, интервал среза может соответствовать периоду времени, равному 8 циклам. Если конкретно не указано иное, далее интервал среза считается содержащим 4 цикла поступающего сигнала, при этом ясно, что могут быть легко реализованы другие интервалы срезов. Например, срез может выражаться в циклах, но необязательно должен содержать множество полных циклов какого-либо сигнала или шаблона. Срез может соответствовать любому заданному количеству времени. Длительность среза может быть при необходимости изменена в приемнике. Например, в приемнике могут быть реализованы две программы одновременного захвата двух потоков срезов, например, одного с частотой 20 кГц и другого с частотой 12,5 кГц. При вычислении обоих срезов могут использоваться две различные длительности срезов, применимые для каждого канала. Как обозначено позицией 106 на фиг. 1, четыре интервала срезов могут содержать 16 циклов и иметь длительность 800 мкс. Наконец, 64 цикла опорной частоты могут быть поделены на 16 интервалов срезов, как обозначено позицией 108. Число выборок поступающего сигнала, входящих в один срез, обусловлено определением интервала среза и частотой выборки АЦП:
число выборок на срез = частота выборки АЦП ⋅ интервал среза.
АЦП может иметь частоту выборки, по меньшей мере равную частоте выборки, требуемой согласно теореме Найквиста, а именно, по меньшей мере вдвое превышать частоту интересующего сигнала. В одном из вариантов осуществления может быть выбрана более высокая частота выборки АЦП, такая как в пять или более раз превышающая частоту интересующего поступающего сигнала. Могут использоваться другие частоты выборки. В одном из вариантов осуществления АЦП в приемнике (прикрепленном, например, к животу пациента) может быть сконфигурирован на выполнение 40 или более выборок в секунду. Может преимущественно выбираться периодическое время начала последовательных срезов с определенным, например, фиксированным интервалом. Тем менее, приемлемые результаты также могут быть получены даже в случае коротких промежутков времени, когда выборка не осуществляется.
Чтобы определить сходство между оцифрованными выборками поступающего сигнала и контрольным шаблоном, может быть получено скалярное произведение (сумма произведений соответствующих выборок) или выполнена операция корреляции. На фиг. 2А показана такая операция корреляции оцифрованного поступающего сигнала и косинусоидального шаблона. В данном случае, А может означать оцифрованный поступающий сигнал, а В может означать шаблон первой эталонной функции, такой как, например, косинусоидальный шаблон на первой опорной частоте (например, 20000 Гц). Иными словами, в одном из вариантов осуществления косинусоидальный шаблон В является представлением того, как по предположению приемника 104 должен выглядеть косинусоидальный компонент принимаемого сигнала, а операция корреляции определяет степень сходства между сигналом А и косинусоидальным шаблоном В. Как показано, выборки сигнала А умножаются на соответствующие выборки косинусоидального шаблона В, а результаты их сложения суммируются с числом выборок N. Говоря более строго, С является скалярным произведением А и В и может быть выражено следующим уравнением:
Аналогичным образом, на фиг. 2Б показа корреляция В и синусоидального шаблона. В данном случае А может означать оцифрованный поступающий сигнал, a D может означать шаблон второй эталонной функции со сдвигом по фазе на 90 градусов относительно первой эталонной функции. Например, шаблоном второй эталонной функции может являться, например, синусоидальный шаблон на опорной частоте (например, 20000 Гц). Как показано, выборки сигнала А умножаются на соответствующие выборки синусоидального шаблона D, а результаты их сложения суммируются с числом выборок N. Говоря более строго, S является скалярным произведением А и D и может быть выражено следующим уравнением:
Ортогональные косинусоидальные и синусоидальные шаблоны сдвинуты по фазе на 90 градусов относительно друг друга. Результаты двух корреляций С и S в сочетании отображают срез. В полярной системе представления комплексных чисел С + j ⋅ S является вектором, угол которого указывает фазу между поступающим сигналом контрольными шаблонами приемника. На практике срез можно считать фильтром 1/(интервала среза).
В одном из вариантов осуществления скалярные величины С и S могут быть масштабированы с использованием коэффициента масштабирования. Например, С и S быть масштабированы таким образом, что они могут иметь значения в области, например, от 0 до 1. Могут применяться другие коэффициенты масштабирования и области значений.
Как и описано в изобретении, контрольными шаблонами являются синусоидальные шаблоны и косинусоидальные шаблоны. Тем не менее, в качестве контрольных шаблонов могут использоваться другие сигналы периодической формы, такие как, например, сигналы пилообразной, прямоугольной или квадратной формы. При выборе сигналов несинусоидных форм в качестве контрольных шаблонов часть информации может отбрасываться, но из принимаемого сигнала может быть извлечен интересующий сигнал. Кроме того, даже при несовпадении контрольных шаблонов по фазе на 90 градусов могут использоваться контрольные шаблоны с другими фазовыми соотношениями. Например, контрольные шаблоны могут не совпадать по фазе на 89 градусов или 91 градус без существенных неблагоприятных последствий.
В одном из вариантов осуществления корреляции срезов (или просто срезы) могут вычисляться на основании необработанных оцифрованных выборок, генерируемых АЦП 110 приемника. Эти необработанные оцифрованные выборки могут сопоставляться с выборками как косинусоидальных, так и синусоидальных контрольных шаблонов на опорной частоте (freqRef), сохраненных в приемнике 104. В одном из вариантов осуществления косинусоидальный член и синусоидальный член среза могут определяться согласно следующим уравнениям:
в которых N означает число выборок в одном срезе.
Величина вектора среза может быть вычислена путем определения среднеквадратического значения (RMS):

Величина среза является скалярной величиной, отображающей величину объединенных срезов.
Угол вектора среза (угол среза) задан следующим уравнением:

Объединение срезов
На фиг. 3 схематически показано скалярное произведение сигнала А и шаблона В на протяжении двух интервалов срезов (при этом в данном случае интервал среза охватывает один цикл косинусоидального шаблона) и показан аддитивный характер корреляции. Чтобы срезы можно было объединять, в одном из вариантов осуществления все опорные сигналы каждого контрольного шаблона должны являться когерентными, то есть совпадать по фазе друг с другом. Как показано, корреляция или скалярное произведение А и В на протяжении двух интервалов срезов (в этом случае 2N выборок) соответствует простой скалярной сумме (накоплению) корреляции А и В на протяжении первого N цикла и корреляции на протяжении второго N цикла или
Кроме того, чтобы вычислить корреляцию за временной интервал, соответствующий трем интервалам срезов А и В, не требуется заново вычислять C1 и С2. Достаточно вычислить корреляцию С3 и прибавить результат к С12, чтобы получить корреляцию С13 (скалярное произведение векторов А и В на протяжении отрезка сигнала длиной 3 интервала срезов). Поскольку срез эквивалентен фильтру 1/(интервала среза), при объединении срезов в более длинные корреляции, полоса пропускания фильтра соответствующим образом уменьшается, как подробно описано далее.
В одном из вариантов осуществления со срезами обращаются как с комплексными парами, содержащими как косинусоидальный член, так и синусоидальный член. В одном из вариантов осуществления косинусоидальный член среза отображает корреляцию между дискретизированным поступающим сигналом и косинусоидальным шаблоном, хранящимся в приемнике 104 на опорной частоте (freqRef). Аналогичным образом, в одном из вариантов осуществления синусоидальный член среза отображает корреляцию между дискретизированным поступающим сигналом и синусоидальным шаблоном, хранящимся в приемнике 104 на опорной частоте freqRef. В качестве freqRef может быть установлена расчетная или номинальная частота, на которой должен осуществлять передачу передатчик, но которая может варьировать из-за производственных допусков (как в передатчике, так и приемнике), условий окружающей среды, таких как температура передатчика и приемника, искажения в канале связи (например, в водной и физиологической среде тела человека), например, вследствие солености желудочной среды и окружающих тканей. Другие факторы могут включать, например, отклонения в процессе калибровки частоты в передатчике и приемнике, который может не отличаться высокой точностью или может иметь большие шаги при регулировке частоты.
После выполнения расчетов срезов и сохранения членов срезов в памяти 114 исходные необработанные выборки, генерированные АЦП (на основании которых генерированы срезы), могут быть отброшены, поскольку все последующие шаги обнаружения пакетов, определения частоты и декодирования полезной нагрузки могут выполняться на основании сохраненных в виде срезов данных без необходимости когда-либо обращаться к оцифрованным выборкам, генерированным АЦП, или повторно генерировать их. В вариантах осуществления расчет срезов и сохранение данных в виде срезов в памяти 114 может оперативно осуществляться в реальном времени применимым контроллером, имеющимся в приемнике 104. В одном из вариантов осуществления данные корреляция срезов могут рассчитываться и сохраняться в памяти 114 контроллером 112 приемника на протяжении цикла выполнения команд контроллера между периодами выборок, выполняемых АЦП. Соответственно, может не требоваться сохранять в памяти 114 поток необработанных оцифрованных выборок из АЦП 110, что обеспечивает значительную эффективность.
В вариантах осуществления может достигаться значительное уменьшение числа данных, сохраняемых приемником 104. Например, опорная несущая частота может составлять 20000 Гц, а частота выборки АЦП может составлять 3,2 миллиона выборок в секунду (выб./сек), что соответствует 160 выборкам АЦП за цикл несущей частоты. Тем не менее частота выборки АЦП может выбираться свободно. Например, может выбираться частота выборки АЦП порядка тысяч выборок в секунду. Например, может выбираться частота выборки АЦП около 200 тысяч выб./сек, что соответствует 10 выборкам АЦП за цикл несущей частоты. Контроллер 112 может быть сконфигурирован на выполнение, например, 16 миллионов команд в секунду. Если интервал среза составляет 4 цикла опорной частоты при частоте выборки 200 тысяч выб./сек, в каждом срезе содержатся 10⋅4 или 40 выборок АЦП. Между каждым периодом выборки АЦП доступно 16000000/20000 или 80 циклов процессора, что в целом достаточно для генерирования и сохранения записи среза. В одном из вариантов осуществления каждая отдельная новая выборка может включаться в накапливающиеся скалярные произведения косинусоидального и синусоидального членов среза и сохраняться в этих доступных циклах процессора, что позволяет контроллеру 112 генерировать данные в виде срезов, не отставая от выборок, генерируемых АЦП. Результат расчета этой корреляции срезов представляет собой два числа (косинусоидальный член и синусоидальный член) и отображает сжатие 40:2 в пересчете на срез (например, 4 цикла поступающего сигнала) или коэффициент сжатия, равный 20, относительно потока необработанных выборок. В данном конкретном примере это соответствует снижению более, чем на порядок величины требований к памяти. Эта степень сжатия линейно увеличивается в результате увеличения длительности среза или повышения частоты частота выборки. В одном из вариантов осуществления при частоте выборки 760 тысяч выб./сек доступен 21 цикл процессора между выборками, что обеспечивает достаточные вычислительные возможности для генерирования данных в виде срезов без отставания от выборок по мере их поступления. Поскольку каждый цикл представлен 760/20 или 38 выборками, каждый срез отображает 4⋅38 или 152 выборки поступающего сигнала. Получаемый коэффициент сжатия составляет 152:2 или 71.
Аналоговая обработка срезов
В одном из вариантов осуществления поступающий сигнал может умножаться на два аналоговых множителя (например, квадратурных смесителя) с двумя опорными сигналами. Затем все произведения сигналов за определенный период времени могут быть суммированы (например, путем аналоговой интеграции с использованием конденсатора или активной Схеме на основе накопленного заряда конденсатора) и дискретизированы на значительно более низкой частоте. Каждая такая пара выборок отображает пару срезов. При таком аналоговом осуществлении могут быть достигаться выгода с точки зрения потребляемой мощности.
Объединение срезов, фильтрация
Расчет корреляции срезов, по существу, отображает фильтр с полосой пропускания 1/(интервала среза), или в случае опорной частоты 20000 Гц и 4 циклов на срез 1/200 мкс или 5000 Гц, что является относительно широкой полосой пропускания. В одном из вариантов осуществления составные косинусоидальные компоненты пары срезов и синусоидальные компоненты пары срезов могут быть объединены, за счет чего увеличивается длительность среза и создается фильтр с более узкой полосой пропускания. Поскольку между интервалом среза и полосой пропускания фильтра существует обратная зависимость, в одном из вариантов осуществления более узкая полоса пропускания фильтра может достигаться путем объединения членов срезов. В действительности, корреляции срезов, вычисленная на протяжении коротки периодов времени, может быть распространена на более длинные корреляции путем объединения таких коротких периодов времени, то есть путем объединения срезов. В одном из вариантов осуществления члены срезов могут объединяться путем суммирования последовательных косинусоидальных членов срезов и суммирования такого же числа последовательных синусоидальных членов срезов. Полученные два новых члена в паре образуют объединенный срез, отображающий более длинную корреляцию.
В вариантах осуществления такой расчет объединения срезов может выполняться для каждого номера среза (т.е. без перескакивания к каждому энному номеру среза). На фиг. 4 графически представлено объединение ранее вычисленных и сохраненных пар срезов косинусоидальных и синусоидальных компонентов. Показано, что исходные косинусоидальные компоненты сохраненных в виде срезов данных обозначены как "исходные косинусоидальные члены срезов", а исходные синусоидальные компоненты сохраненных в виде срезов данных обозначены как "исходные синусоидальные члены срезов". Чтобы объединить четыре среза, суммируют первые четыре косинусоидальных члена (i=1, 2, 3, 4) и получают "объединенный косинусоидальный член среза" с номером 1. Аналогичным образом, суммируют первые четыре синусоидальных члена данных в виде срезов и получают "объединенный синусоидальный член среза" с текущим номером 1. Соответственно, в качестве первой итерации суммируют i=1 и ранее вычисленные косинусоидальные члены с номерами i=1, i=2, i=3 и i=4, чтобы получить косинусоидальный член среза SliceCosTerm1, и объединяют ранее вычисленные синусоидальные члены с номерами i=1, i=2, i=3 и i=4, чтобы получить синусоидальный член среза SliceSinTerm1, после чего увеличивают i до 2. Затем может быть получен косинусоидальный член среза SliceCosTerm2 из четырех последовательных косинусоидальных членов среза, начиная с текущего номера среза i=2; а именно, i=2, i=3, i=4 и i=5. Аналогичным образом, путем такого же вычисления может быть получен синусоидальный член среза SliceSinTerm2. Эта операция может выполняться для всей записи среза. Путем варьирования числа объединяемых срезов можно по желанию выбирать полосу пропускания получаемого фильтра. Эта способность быстрым и простым способом генерировать различные фильтры выгодно используется в приемнике. В качестве простого примера, когда приемник 104 ведет поиск несущей частоты принимаемого сигнала, может быть объединено небольшое число косинусоидальных и синусоидальных членов среза, чтобы получить, по существу, фильтр с относительно широкой полосой пропускания, за счет чего повышается вероятность присутствия несущей частоты в пределах диапазона частот, который охватывает широкополосный фильтр. Тем не менее, такой широкополосный фильтр также пропускает соответствующее большое количество шума, что может затруднять обнаружение особо слабых сигналов. В качестве альтернативы, может быть большое число членов среза, чтобы получить по существу, фильтр с соответствующей узкой полосой пропускания. Такой узкополосный фильтр не пропускает большое количество шума, что может облегчать обнаружение несущей частоты.
В вариантах осуществления одним из результатов объединения срезов является цифровой фильтр с уменьшенной полосой пропускания при сохранении разрешения по времени исходных срезов. Следует отметить, что такие фильтры могут конструироваться с использованием только данных в виде срезов, сохраненных в памяти 114, поскольку исходные необработанные данные АЦП могли быть уже отброшены и, соответственно, быть недоступными. В вариантах осуществления может быть предусмотрено объединение большего числа срезов. Кроме того, может многократно осуществляться объединение различного числа срезов (и, следовательно, реализация фильтров с различными полосами пропускания) с использованием данных в виде исходных срезов или записи ранее объединенных срезов без повторного обращения к исходным необработанным выборкам АЦП (которые в любом случае могли быть отброшены) и без повторного захвата поступающего сигнала и повторного генерирования новых необработанных выборок АЦП. Из-за высокой степени сжатия, отображенного данными в виде срезами (т.е. более, чем на порядок величины в рассматриваемом примере), длинные записи данных в виде срезов могут храниться, например, в памяти контроллера даже в случае жестких ограничений на емкость памяти. Память 114, показанная на фиг. 1, может являться внешней или внутренней по отношению к контроллеру 112.
В одном из вариантов осуществления срезы не требуется объединять, если задан исходный интервал среза такой же длительности, как период времени объединенного среза в случае объединения срезов. Например, в качестве примера рассматриваемой реализации может быть задан интервал среза большей длительности, чем 4 цикла. Это может быть желательным в системах с хорошей кварцевой стабилизацией частоты передатчика и приемника. В таких случаях деформирование (описанное далее) необходимо лишь в узком диапазоне частот для обнаружения несущей частоты и/или присутствия пакета в зашумленной среде. Соответственно, в одном из вариантов осуществления для формирования фильтра может использоваться первоначально захваченный набор срезов без необходимости объединять срезы, как описано в изобретении.
Поскольку описанные и проиллюстрированные расчеты объединения срезов главным образом состоят из сложения, такие расчеты объединения могут выполняться эффективным образом. Кроме того, поскольку операция объединения срезов возможна только с пронумерованными синусоидальными и синусоидальными членами срезов, хранящимися в памяти 114, необязательно выполнять ее в реальном времени по мере поступления необработанных выборок, и она может выполняться после того, как на основании необработанных выборок АЦП поступающего сигнала генерированы и сохранены в памяти 114 все пары срезов. Помимо этого, поскольку в одном из вариантов осуществления операции объединения не приводят к изменению сохраненных пронумерованных пар срезов, операции объединения срезов могут повторяться любое число раз в зависимости от потребностей общих алгоритмов обнаружения и декодирования. Иными словами, данные в виде исходных срезов могут по желание использоваться множество раз. В качестве альтернативы, возможна операция объединения срезов, которые сами являются результатом операции объединения. Например, четыре среза могут быть объединены (в 4-срезную запись) путем 1) объединения четырех исходных срезов с целью генерирования 4-срезной записи или 2) объединения двух исходных срезов в 2-срезную запись, а затем объединения двух срезов 2-срезной записи с целью генерирования желаемой 4-срезной записи. Такая гибкость может использоваться, например, для сохранения памяти в процессоре.
Краткие выводы: срез и объединение срезов
Из описанного до этого момента представления в виде срезов можно заключить, что поступающий сигнал может захватываться с помощью последовательности коротких корреляций и контрольных шаблонов. Шаблоны могут содержать первую эталонную функцию и вторую эталонную функцию. В одном из вариантов осуществления первая и вторая эталонные функции сдвинуты по фазе на 90 градусов относительно друг друга; Например, первая эталонная функция может представлять собой или содержать косинусоидальную функцию, а вторая эталонная функция может представлять собой или содержать синусоидальную функцию. Может быть удобно выбрана длина корреляции, составляющая несколько периодов (или более) функций шаблона. Результатом корреляции являются два скалярных члена, которые можно считать представляющими комплексное число: costerm + j ⋅ sinterm. Каждый результат корреляция именуется в изобретении срезом, при этом в памяти в записи среза хранится несколько срезов. Одной из операций, которая может применяться к записи среза, является описанное выше объединение срезов. Объединение срезов осуществляется путем простых сложений отдельных членов срезов. Результатом объединения срезов является запись нового среза, отображающая фильтр с более узкой полосой пропускания, чем запись исходного среза. Это очень выгодно при приеме и фильтрации зашумленного сигнала.
До этого момента в описании средней частотой полученного путем объединения срезов узкополосного фильтра являлась частота функций контрольного шаблона. Этот выбор всего одной средней частоты в значительной степени ограничивает захват срезов и операции объединения срезов, описанные до сих пор. Далее описан один из вариантов осуществления способа перемещения запись среза на какую-либо соседнюю частоту и тем самым значительного повышения эффективности представления в виде срезов.
Деформирование
Одной из важных функций любого устройства обработки сигналов является способность реагировать на колебания частоты передаваемого сигнала. Это же относится к системам, захватывающим сигнал с описанным выше представлением в виде срезов. После захвата сигнала в форме срезов с использованием корреляции с контрольными шаблонами может быть желательным создание фильтров на других частотах помимо опорной частоты (например, на опорной частоте (freqRef) плюс частота дельта (freqDelta). Частота дельта может иметь положительный или отрицательный сдвиг относительно опорной частоты freqRef. В одном из вариантов осуществления такой новый узкополосный фильтр со средней частотой freqRef + freqDelta может быть создан путем а) захвата записей срезов на опорной частоте (freqRef), б) преобразования (также называемого "деформированием") записи исходного среза в запись нового деформированного среза с использованием операции вращения комплексного вектора, в которой угол вращения обусловлен или определен так называемой функцией деформирования (WF), и в) объединения деформированных срезов с целью генерирования узкополосного фильтра теперь со средней частотой freqRef + freqDelta.
Соответственно, в одном из вариантов осуществления данные в виде срезов, принимаемые на одной частоте (например, freqRef), могут деформироваться в данные в виде срезов на другой частоте, скажем, freqRef + freqDelta. В одном из вариантов осуществления это может происходить без сбора новых данных и без необходимости повторно использовать исходные выборки, генерированные АЦП 110 в аналоговых внешних интерфейсных аппаратных средствах приемника 104, поскольку поток таких исходных данных может отбрасываться или просто никогда не сохраняться. Соответственно, в одном из вариантов осуществления способ деформирования может быть сконфигурирован на сдвиг средней частоты цифрового фильтра без повторного сбора новых данных и повторного использования исходных выборок, генерированных АЦП 110, в который вводится (обработанный) поступающий сигнал.
Полярная система представления
На фиг. 5 показан вектор 504, имеющий длину 1, в системе 502 полярных координат. Показано, что любая точка в системе 502 полярных координат может быть представлена как комплексная пара, а именно (x, y). Аналогичным образом, любая точка в системе 502 полярных координат, может быть представлена величиной 504 и углом 505 (r, θ), при этом θ означает угол вектора 504 относительно положительной оси х. Точки z в комплексной плоскости могут определяться как точки, удовлетворяющие уравнению z=r cos θ + j ⋅ r sin θ. Координаты любой точки содержат как косинусоидальный член (r cos θ) 508, так и синусоидальный член (r sin θ) 506.
Как показано на фиг. 6А, опорная частота freqRef, такая как частота контрольного шаблона, используемого в операции корреляции, может быть представлена как вращающийся вектор в системе полярных координат. В идеале сигнал, принимаемый приемником, имеет точно такую же частоту, как частота, на которой он передан, т.е. опорную частоту. Однако на практике это часто не так. Частота принимаемого поступающего сигнала может быть выше, чем опорная частота freqRef. В этом случае при использовании векторного представления с вращением, показанного на фиг. 5, вектор, представляющий поступающий сигнал, будет опережать (вращаться быстрее, чем) вектор, представляющий опорную частоту freqRef, как показано на фиг. 6Б. Аналогичным образом, частота принимаемого поступающего сигнала может быть ниже, чем опорная частота freqRef. В этом случае, вектор, представляющий поступающий сигнал, будет отставать (вращаться медленнее, чем) вектор, представляющий опорную частоту freqRef, как показано на фиг. 6В.
В примере, проиллюстрированном на фиг. 7, показано, что поступающий сигнал имеет более высокую частоту, чем опорная частота. На фиг. 7 проиллюстрирована система полярных координат, в которой ось x соответствует косинусоидальному члену, а ось у соответствует синусоидальному члену. Сигнал на опорной частоте (freqRef, сплошная линия) показан, как это принято, в виде вектора, проходящего вдоль положительной оси х. Данные в виде срезов, генерируемые на основании поступающего сигнала, показаны в виде пунктирных векторов, представляющих срезы 1, 2, 3, 4 и т.д. На этом статическом представлении можно увидеть, что вектор, представляющий первый срез, образует произвольный (0-2π радиан) фазовый угол α по отношению к вектору опорной частоты. В этом примере векторы последующих срезов с номерами срезов 2, 3, 4 и т.д. опережают (т.е. вращаются быстрее, чем) вектор опорной частоты на все возрастающий угол. В основе концепции деформирования лежит то, что угол каждого последующего среза возрастает на постоянную величину Ф для всех срезов. Иными словами, вектор второго среза находится под углом Ф к вектору первого среза, вектор третьего среза находится под углом Ф к вектору второго среза или 2Ф к вектору первого среза, а вектор четвертого среза находится под углом Ф к вектору третьего среза или 3Ф к вектору первого среза. Соответственно, угол Ф и кратные ему величины можно считать показателем опережения или отставания срезов, при этом кратные ему величины отображают опережения или отставания относительно вектора опорной частоты. На фиг. 7 показано, что - в случае, когда частота поступающего сигнала в точности не соответствует опорной частоте, данные в виде срезов все больше не совпадают по фазе (опережают или отстают) с вектором опорной частоты по мере роста числа срезов. Даже очень небольшой исходный угол Ф имеет тенденцию возрастать, в результате чего с течением времени срезы начинают значительно не совпадать по фазе. Угол Ф пропорционален соотношению freqDelta (разности между частотой поступающего сигнала и частотой контрольных шаблонов в приемнике) и частоты freqRef контрольных шаблонов. Угол Ф также пропорционален интервалу среза. В одном из вариантов осуществления угол Ф в радианах может быть задан следующим уравнением:

в котором freqDelta означает разность между частотой поступающего сигнала (freqSignal) и частотой опорного сигнала (freqRef).
В случае сигнала с постоянной частотой угловой сдвиг между среза является одинаковым. Как наглядно показано на фиг. 7, угол поворота последовательных срезов не постоянной величиной по отношению к вектору опорной частоты. Напротив, в этом наглядном примере угол сдвига каждого следующего среза относительно первого среза равен целой величине, кратной углу Ф.
Векторное вращение
Поворот комплексного вектора на угол θ может быть представлен в общем виде следующим уравнением матричной формы:
в котором х и у означают исходные координаты вектора, а θ означает угол поворота при положительном вращении против часовой стрелки. Получаемый повернутый вектор имеет координаты и х' и y'. Операция вращения может быть выражена в алгебраической форме двумя уравнениями:


Эта операция может быть неформально представлена следующим образом:
повернутый вектор = вращение вектора (входной вектор, угол)
В системе представления срезов косинусоидальный член соответствует оси х, а синусоидальный член соответствует оси у.
Функция деформирования
Комплексное представление позволяет отображать срезы как векторы в комплексной полярной плоскости. Система комплексного представления векторов служит удобным способом иллюстрации операций деформирования при следующем далее описании так называемой функции деформирования (WF). Срезы могут быть представлены как комплексные пары, а именно costerm + j ⋅ sinterm. В одном из вариантов осуществления способ оперирования данными в виде срезов можно охарактеризовать как векторное вращение, угол поворота в котором определяется функцией деформирования (WF). Запись деформирования среза может являться результатом операции вращения комплексного вектора (скажем, VectorRotate) с использованием двух аргументов: записи входных данных в виде срезов (далее - срезы входных данных) и угла поворота (определяемого результатом функции деформирования), на который должен быть повернут каждый срез в записи данных в виде срезов. В более лаконичной форме обобщенная операция деформирования может быть описана следующим образом:
деформированный срез(i) = вращение вектора (входные срезы(i), WF(θ, i, другие аргументы)),
где i означает от 1 до числа срезов в записи срезов. Угол поворота выводится из функции деформирования:
угол(i) = WF(θ, i, другие аргументы)
В различных вариантах осуществления выбор функции деформирования (WF) и угла θ в уравнении определяет свойства получаемой записи деформированных срезов.
Примеры функции деформирования
В этом разделе описан ряд функций деформирования от простого случая до более сложного случая, из которого можно почерпнуть несколько полезных определении.
Начнем с относительно простого примера, в котором функция деформирования может быть задана как WF()=1⋅θ. Если применить эту функцию деформирования к записи срезов, вся запись срезов сдвигается на постоянный фазовый угол θ. В системе полярных координат на фиг. 5 эта функция деформирования соответствует повороту всех векторов срезов на одинаковый угол θ. Что касается временной области, при фазовом сдвиге на постоянную величину поступающий сигнал опережает или отстает от контрольных шаблонов приемника без иных изменений свойств сигнала.
Деформирование с целью настройки срезов на новую среднюю частоту
В одном из вариантов осуществления функция деформирования быть задана как

где канонический показатель i означает номер номера среза (а не комплексный корень "i") и угол между последовательными срезами. В таком случае

Операция деформирования может выполняться с исходными членами срезов (косинусоидальным членом, синусоидальным членом) с целью генерирования деформированной записи срезов, содержащей деформированные члены срезов (деформированный косинусоидальный член, деформированный синусоидальный член):
деформированный косинусоидальный член(i) = косинусоидальный член(i) ⋅ косинус (-i⋅ ) - синусоидальный член(i) ⋅ синус (-i⋅ )
деформированный синусоидальный член(i) = косинусоидальный член(i) ⋅ синус (-i⋅ ) + синусоидальный член(i) ⋅ косинус (-i⋅ )
Описанная операция деформирования эффективно перестраивает приемник 104, с использованием сохраненных срезов на новую частоту (freqRef + freqDelta). В вариантах осуществления эта перенастройка достигается путем использования сохраненных в виде срезов данных, а не повторного сбора данных в виде срезов на какой-либо другой частоте (такой как новая частота) или повторно обработки исходных выборок АЦП, которые могли быть отброшены или никогда не сохранялись после их сбора. Кроме того, такая операция является не прямым векторным вращением, а операцией деформирования срезов, в результате которой запись срезов перестраивается с одной частоты (freqRef) на другую частоту (freqRef + freqDelta). Как показано на фиг. 8, срезы 1, 2, 3 и 4, … N совмещены друг с другом. В результате выполнения описанной выше операции объединения срезов с набором деформированных срезов получают максимальный отклик на деформированной частоте freqRef + freqDelta. Это соответствует фильтру, настроенному на эту среднюю частоту. На фиг. 8 показано, как в одном из вариантов осуществления путем объединения срезов (сложения векторов) объединяют векторы совмещенных срезов, полученные в результате операции деформирования. Если поступающий сигнал имеет частоту freqRef + freqDelta, срезы в деформированной записи срезов будут совмещены или преимущественно совмещены друг с другом и объединены, обеспечивая максимально возможную чувствительность фильтра.
Обнаружение несущей частоты путем деформирования и объединения срезов
В одном из вариантов осуществления показанные и описанные функции деформирования и объединения срезов могут применяться для обнаружения несущей частоты поступающего сигнала на начальной стадии процесса обнаружения путем поиска несущей частоты передаваемого сигнала в определенном диапазоне частот. Как показано на фиг. 9, freqRef является опорной частотой, такой как, например, номинальная частота передачи, на которую рассчитан передатчик. Фактическая несущая частота 904 может быть заранее не известна приемнику 104, который в таком случае может вести поиск фактической несущей частоты, располагая только знанием опорной частоты и, возможно, некоторыми сведениями о передатчике (например, о том, что отклонение фактической частоты приемника от опорной частоты, вероятно, составляет не боле нескольких герц). В одном из вариантов осуществление с целью обнаружения фактической несущей частоты 904 поступающего сигнала поступающий сигнал может быть дискретизирован и преобразован в цифровую форму (необязательно после определенной предварительной аналоговой обработки) и данные в виде срезов (комплексные пары косинус-синус). Соответственно, принимаемые поступающие данные преобразуются в данные в виде срезов, нумеруются и сохраняются (последовательное сохранение данных в виде срезов, начиная с известной ячейки памяти, по сути, может служить для номерации данных в виде срезов) по мере генерирования АЦП 110 выборок поступающих аналоговых данных, подвергнутых предварительной обработке (например, фильтрации, усилению и/или нормализации помимо других возможных операций). Дискретные поступающие данные (например, выборки, генерированные АЦП 110) не требуется сохранять, а в случае их сохранения они могут отбрасываться после генерирования и сохранения данных в виде срезов. Затем избирательное число срезов может объединяться с целью формирования фильтра 905 с соответствующей избирательной полосой пропускания. Полоса пропускания фильтра может выбираться путем объединения меньшего числа (с получением более широкополосного фильтра) или большего числа (с получением более узкополосного фильтра) срезов. Максимум отфильтрованных данных в виде срезов может служить признаком фактической несущей частоты. Если максимум, служащий признаком присутствия фактической несущей частоты 904 в пределах полосы пропускании фильтра не обнаружен, может применяться показанная и описанная выше функция деформирования исходных срезов (как, например, на фиг. 9) с целью их переноса на следующую потенциальную частоту 906 со сдвигом на величину freqDelta на фиг. 9. Деформированные срезы могут быть снова объединены с целью формирования избирательно узкополосного или широкополосного фильтра на новой средней частоте 907, и может проверяться наличие максимума 908, служащего признаком фактической несущей частоты. Этот процесс может часто повторяться до тех пор, пока фактическая несущая частота 904 не окажется в пределах полосы пропускания фильтра 909. Затем путем конструирования одного или нескольких более узкополосных фильтров (путем объединения большего числа срезов) и проверки присутствия фактической несущей частоты 904 могут выполняться все более точные расчеты фактической несущей частоты 904. Такие более узкополосные фильтры могут облегчать процесс обнаружения путем ослабления большого числа шума, в результате чего большая часть энергии в пределах полосы пропускания фильтра приходится на несущую частоту 904. Описанная выше стратегия поиска несущей частоты является одной из простых стратегий обнаружения фактической несущей частоты. В этих же целях могут быть предусмотрены другие стратегии с использованием функция деформирования и объединения срезов.
Использование одной записи среза для обнаружения ЧМн
В одном из вариантов осуществления показанная и описанная выше функция деформирования может применяться для эффективного обнаружения модуляции методом частотной манипуляции (ЧМн). Следует отметить, что обнаружение ЧМн также может осуществляться путем выполнения двух параллельных вычислений срезов, одного на частоте freq0, а другого на частоте freq1. Как показано на фиг. 10, поступающие данные могут быть преобразованы в данные в виде срезов на одной опорной частоте (freqRef) 1001, которой в одном из вариантов осуществления может быть выбрана, например, частота примерно посередине между известной или номинальной верхней частотой (freq1) 1002 и номинальной нижней частотой (freq0) 1003 ЧМн. Затем, если это еще не сделано, данные в виде срезов могут нумероваться и сохраняться по мере того, как АЦП 110 генерирует выборки цифровых данных на основе поступающих предварительно обработанных аналоговых данных. Поступающие данные (например, выборки АЦП 110) не требуется сохранять, а в случае их сохранения они могут отбрасываться после сбора и сохранения данных в виде срезов. Затем сохраненные срезы могут избирательно деформироваться на избирательном числе частот и объединяться с целью формирования первого относительно широкополосного фильтра со средней частотой на одной из двух номинальных частот ЧМн, скажем, на частоте freq0 1004. При этом приемник 104 фактически перенастраивается с первой частоты (freqRef в этом примере) на вторую частоту freq0, отстоящую от первой частоты на величину (в герцах), равную разности между freqRef и freq0. Аналогичным образом, исходные сохраненные срезы могут затем избирательно деформироваться на избирательном числе частот и объединяться с целью формирования второго относительно широкополосного фильтра со средней частотой на второй из номинальных частот ЧМн, в этом примере на частоте freq1 1005. Как и в случае перенастройки приемника 104 на частоту freq0, при этом приемник 104 фактически перенастраивается с первой частоты (freqRef в этом примере) на вторую частоту freq1, отстоящую от первой частоты на величину, равную разности между freq1 и freqRef. При перенастройке приемника 104 на freq0 и freq1 полосы пропускания первого фильтра 1004 и второго фильтра 1005 могут конфигурироваться относительно широкими (путем объединения относительно меньшего числа срезов) с целью повышения вероятности того, что в каждом случае фактические частоты ЧМн (предположительно вблизи частот freq0 и freq1) будут находиться в пределах полосы пропускания соответствующего первого и второго фильтров. Функция деформирования может по мере необходимости применяться для поиска фактических частот ЧМн или точной настройки на них. Точность обнаружение может повышаться путем конструирования относительно более узкополосных фильтров (путем объединения относительно большего числа срезов), в результате чего за счет ослабленил большего числа шума повышается отношение сигнал-шум выходного сигнала.
Если первая и вторая фактические частоты ЧМн (actualfreq0 1104 и actualfreq1 1110) были обнаружены в пределах полосы пропускания широкополосных фильтров, сформированных на основе данных в виде срезов, в одном из вариантов осуществления и, как показано на фиг. 11, функция деформирования может снова использоваться с целью точной идентификации обеих фактических частот actualfreq0 1104 и actualfreq1 1110 ЧМн. Показано, что частоты freq0 1102 и actualfreq0 1104 различаются на величину freqDelta0, обозначенную позицией 1106. Аналогичным образом, частоты freq1 1108 и actualfreq1 1110 различаются на величину freqDelta1, обозначенную позицией 1112. Обе величины, а именно, freqDelta0 1106 и freqDelta1 1112, отображают степень отклонения обеих частот ЧМн от номинальных частот freq0 1102 и freq1 1108 ЧМн, на которых рассчитан вести передачу передатчик. Такое отклонение может быть вызвано, например, погрешностью калибровки вследствие неточной настройки передатчика на заводе-изготовителе, влиянием температуры или других факторов окружающей среды, таких как локальная проводимость вокруг передатчика, которая влияет на частоту передачи. По существу, частоты freq0 1102 и freq1 1108 можно считать приближением первого порядка местонахождения частот actualfreq0 1104 и actualfreq1 1110, соответствен не. Для точной настройки приемника 104 на обе фактические частоты actualfreq0 1104 и actualfreq1 1110 ЧМн и подавления нежелательного сигнала(-ов) (если они имеются) к данным в виде уже деформированных срезов может снова применяться функция деформирования с целью создания методом итераций (если требуется) применимых узкополосных фильтров с различными центральными частотами до появления выраженных максимумов, служащих признаков присутствия фактических частот 1104 и 1110 в полосах пропускания фильтров. Этот процесс может повторно осуществляться до тех достаточной локализации фактических частот 1104 и 1110 и подавления частоты (обычно шума) по обе стороны от созданных таким способом узкополосных фильтров с целью обеспечения надежного обнаружения и декодирования.
Как показано на фиг. 11, после обнаружении действительных частот ЧМн вблизи номинальных частот freq0 1102 и freq1 1108 может применяться функция деформирования, чтобы перенастроить приемник 104 (если он уже не был перенастроен в результате поиска обеих фактических частот ЧМн) с частоты freq0 1102 на частоту actualfreq0 1104 путем сдвига фильтра на величину freqDelta0 в несколько герц, обозначенную позицией 1.106 на фиг. 11. Аналогичным образом, функция деформирования также может применяться, чтобы перенастроить приемник 104 с частоты freq1 1108 на частоту actualfreq1 1110 также путем сдвига фильтра на величину freqDelta1 в несколько герц, обозначенную позицией 1112 на фиг. 11. Соответственно, в результате этой тонкой настройки приемник 104 использует данные в виде срезов, которые собраны на частоте freqRef и перенастроены на первую и вторую фактические частоты ЧМн, а именно, частоту freqwarp0 1114 (равную freq0 - freqRef + freqDelta0) и частоту freqwarp1 1116 (равную freq1 - freqRef + freqDelta1). Поскольку приемнику заранее известна зависимость между обеими частотами ЧМн (такая как известное соотношение), такая зависимость может использоваться приемник при настройке на обе отдельные частоты ЧМн.
Соответственно, в одном из вариантов осуществления приемник 104 может быть сконфигурирован на настройку на частоту freqRef, которая не является ни первой частотой freq0 ЧМн, ни второй частотой freq1 ЧМн. В таком случае приемник 104 может быть перенастроен с использованием функций деформирования и объединения срезов на первую и вторую частоты freq0 и freq1 ЧМн, а затем на фактические частоты ЧМн путем тонкой настройки, но без повторного сбора данных на какой-либо из этих частот, то есть без повторного сбора новых необработанных данных АЦП на перенастроенной частоте или без считывания ранее сохраненных дискретных необработанных данных из памяти 114. Кроме того, согласно вариантам осуществления такая перенастройка может выполняться путем обработки значительно меньшего числа данных (например, на порядок или более), чем потребовалось бы противном случае в случае сбора новых данных АЦП или манипулирования исходными данными, хранящимися в памяти 114, и их повторной обработки с целью обнаружения частот freq0 и freq1 ЧМн. Так, в одном из вариантов осуществления перенастройка приемника 104 может выполняться исключительно посредством по большей части операций сложения и некоторых операций умножения с ограниченным количеством ранее собранных данных в виде срезов.
Деформирование с целью подавления шума, совмещения срезов по оси
Как показано на фиг. 8, векторы совмещенных срезов имеют ненулевой косинусоидальный компонент по оси x и ненулевой синусоидальный компонент по оси y. Каждый из этих компонентов может содержать сигнал и шум. Если векторы совмещенных срезов на фиг. 8 принудительно совмещены, например, с осью x (и тем самым их синусоидальный компонент был сведен к нулю), в одном из вариантов осуществления их синусоидальный компонент содержит только нулевой сигнал и шум. Этот можно безопасно игнорировать, поскольку вся энергия среза (и, соответственно, сигнала) теперь совмещена, с осью x. Соответственно, в одном из вариантов осуществления функция деформирования (WF) при обнаружении изменена таким образом, чтобы вся энергия срезов находилась в одном из двух измерений. Например, если все срезы были бы направлены вдоль действительной оси х, на мнимой оси у оставался бы только шум без сигнала. Соответственно, в одном из вариантов осуществления деформированные срезы могут совмещаться с осью х или осью путем прибавления постоянного угла (Θ) к деформированным срезам:

Соответственно, при этой реализации функции деформирования добавляют постоянный угол после масштабирования номера среза на величину i. В результате добавления постоянного угла Θ (который может являться положительным или отрицательным по знаку) выходные срезы совмещаются в выбранном (и предпочтительном) направлении, например, с действительной осью (косинусоидальным компонентом или осью х) или мнимой осью (синусоидальным компонентом или осью y). Тем не менее, деформированные срезы могут совмещаться путем деформирования под любым углом при разумном выборе постоянного угла.
Деформирование с целью корректировки искажение частоты
В дополнительных вариантах осуществления могут быть предусмотрены функции деформирования на основе более сложных моделей или последовательностей номеров срезов. Например, коэффициентом масштабирования необязательно должно являться целое число. Например, если при передаче пакетов частота передачи снижается (или повышается) с приближением к концу пакета, функция деформирования может быть приспособлена к слежению за снижением частоты с приближением к концу пакета. Например, если допустить, что приемник идентифицировал начальный номер среза в пакете, с целью совмещения всех срезов в пакете к записи срезов может быть применена следующая функция деформирования:

где, например, коэффициент масштабирования = [1 1 1 1 1 1 1 1 .9 .9 .8 .8 .7 .6 .5 .3 и т.д.]. Коэффициент масштабирования может представлять собой алгебраическое выражение или может быть извлечен из хранящейся в памяти 114 таблицы с соответствующими значениями. Этим способом функция деформирования может быть сконфигурирована на отслеживание любого поддающегося количественному определению изменению профиля частот принимаемых пакетов и тем самым может предусматривать, например, непостоянные и/или нецелочисленные последовательные корректировки угла деформирования от среза к срезу.
Деформирование с целью обнаружения линейной частотной модуляции
В одном из вариантов осуществления деформирование также может применяться к любому поступающему сигналу, имеющему непостоянную частоту, такому как сигнал с намеренной линейной частотной модуляцией, или к передатчику с управлением частотой, в котором частота передаваемого сигнала повышается или снижается по мере разрядки аккумуляторной батареи передатчика.
Например, если поступающий сигнал является сигналом с возрастающей частотой линейной частотной модуляции, данные в виде срезов могут деформироваться под углом, который увеличивается быстрее, чем согласно целочисленной модели, описанной со ссылкой на фиг. 7 и 8. Например, первый срез может быть деформирован под углом с коэффициентом 1 ⋅ , второй срез может быть деформирован под углом с коэффициентом 2.2 ⋅, третий срез может быть деформирован под углом с коэффициентом 3.3 ⋅ и т.п. Соответственно, в вариантах осуществления вычисление угла деформирования может представлять собой любую функцию, которая отражает структуру частот ожидаемого поступающего сигнала. Применение срезов в вариантах осуществления обеспечивает эффективное использование ресурсов за счет того, что может достигаться высокая степень сжатия данных путем преобразования потока необработанных выборок АЦП 110 в данные в виде срезов и отбрасывания (или отказа от сохранения) необработанных дискретных данных. Это важно с точки зрения не только требуемого объема памяти 114, но также объема выполняемых позднее расчетов в процессе обнаружения и декодирования. Применение срезов, функций деформирования и объединения срезов функций в вариантах осуществления также придает приемнику 104 высокую степень гибкости во множестве мест в алгоритме обнаружения. Поскольку исходные срезы могут быть иметь относительно широкую полосу пропускания, они могут перенастраиваться/ деформироваться со сдвигом на множество герц в любом направлении. Например, срез с полосой пропускания 5000 Гц в вариантах осуществления может быть деформирован со сдвигом вверх или вниз на 1000-2000 Гц или более без значительной потери силы сигнала.
Корреляция срезов: обнаружение известной модели
В одном из вариантов осуществления может выполняться процедура обнаружения присутствия одного или нескольких пакетов данных в записи срезов. В одном из вариантов осуществления анализу подвергается не поток исходных необработанных данных, выборку которых осуществляет АЦП (которые в любом случае могли быть отброшены ранее), а данные в виде индексированных и сохраненных срезов. В одном из вариантов осуществления к данным в виде срезов может применяться какая-либо функция (например, функция вещественной или комплексной корреляции), чтобы сравнить их с одной или несколькими ранее сохраненными моделями срезов, соответствующими известным моделям срезов в сигнале. В одном из вариантов осуществления пакеты данных, которые должны быть обнаружены (и разбиты на кадры, чтобы определить их границы), могут содержать преамбулу известной длины и конфигурации, за которой следует полезная нагрузка известной длины,, из которой путем декодирования может извлекаться полезная информация. Например, каждый искомый пакет данных может содержать преамбулу, содержащую 11 битов. Например, преамбула может содержать известную последовательность, такую как, например, последовательность из 7 нулей, за которой следует 1010 (00000001010). Соответственно, чтобы обнаружить присутствие пакета, в одном из вариантов осуществления может применяться функция вещественной или комплексной корреляции с целью взаимной корреляции данных в виде срезов и модели срезов, соответствующей известной преамбуле. Поскольку в данных в виде срезов закодированы данные, соответствующие одной или нескольким преамбулам одного или нескольких пакетов данных, функция корреляции обеспечивает лучшие результаты, когда преамбула(-ы) поступающих данных в виде срезов и преамбула шаблона совмещены друг с другом, соответственно, худшие результаты, когда преамбулы поступающих данных в виде срезов и преамбула шаблона совмещены только частично, и наихудшие результаты, когда преамбулы поступающих данных в виде срезов и преамбула шаблона не совмещены или поступающие данные в виде срезов не содержат пакетов. Эта операция взаимной корреляции представляет очень узкополосный фильтр, полоса пропускания которого пропорциональна обратному числу срезов в известной преамбуле.
В одном из вариантов осуществления корреляция и деформирование срезов могут использоваться в сочетании друг с другом с целью объективного расчета фактической несущей частоты принимаемого сигнала по мере многократной перенастройки приемника 104 посредством деформирования и определения корреляции получаемых деформированных срезов, например, с ожидаемой моделью срезов, используемой для обнаружения присутствия преамбулы и ее границ. Этим способом может достигаться высокая степень корреляции с фактической несущей частотой принимаемого сигнала.
Корреляция срезов: обнаружение присутствия пакета
В одном из вариантов осуществления процедура обнаружения присутствия одного или нескольких пакетов данных в записи срезов может выполняться до определения частоты(частот) несущей(-их). Как и при описанной выше взаимной корреляции с предварительно сохраненным шаблоном, требуется анализ только данных в виде индексированных и сохраненных срезов. В одном из вариантов осуществления к данным в виде срезов может применяться определенная функция (например, функция вещественной или комплексной корреляции) с целью сравнения данных в виде срезов с самими собой (автокорреляции). Это часто полезно для выполнения расчетов корреляции всего при нескольких различных задержках. Например, может быть рассчитана энергия всей записи А срезов на основании корреляции срезов с задержкой = 0:
Автокорреляция AutoCorr(0) отображает исходный уровень энергии записи срезов, с которым могут сравниваться другие автокорреляции.
Для записи срезов, не содержащей пакетов, автокорреляция срезов с задержкой = 1:
В одном из вариантов осуществления до определения частоты(частот) несущей(-их) может выполняться автокорреляция записи A срезов, чтобы определить, присутствует ли в ней пакет. В случае, когда запись срезов содержит один или несколько пакетов, Corr(1) будет иметь большую величину, чем Corr(0). Это является показателем присутствия пакета где-либо в записи срезов. В случае записи срезов, не содержащей пакетов, автокорреляция срезов с задержкой = 1 будет иметь очень небольшую величину по сравнению с AutoCorr(0), если в записи среза содержится только некоррелированный шум. В одном из вариантов осуществления пакет может считаться обнаруженным, когда установлено, что член автокорреляций Corr(1)/Corr(0) превышает заданный порог.
Подтверждение присутствия пакета может быть получено, если в записи срезов присутствует множество пакетов с известным интервалом m (измеренным в срезах) между пакетами. Корреляция записи срезов с задержкой lag=m (равной интервалу между пакетами) дает высокий показатель, если пакеты разделены ожидаемым интервалом:
В одном из вариантов осуществления пакет может считаться обнаруженным, когда установлено, что члены корреляции, многократно вычисленные на протяжении определенного диапазона ожидаемых интервалов Corr(m±range) между пакетами, превышают заданный порог относительно Corr(0). Ожидаемый диапазон интервалов между пакетами возникает вследствие отклонений частоты пакетов, которая еще должна быть определена. Этим способом может осуществляться обнаружение пакетов с использованием данных в виде срезов путем корреляции записи А среза с задержкой и записи А среза и контроля величины получаемых членов корреляции.
Перекрывающиеся пакеты
В одном из вариантов осуществления, чем больше число пакетов в записи данных в виде срезов, тем лучшими могут быть результаты автокорреляции. Срезы, представляющие множество предполагаемых пакетов, могут суммироваться друг с другом, чтобы повысить вероятность правильного обнаружения пакетов. Кроме того, путем суммирования двух или более предполагаемых пакетов друг с другом могут определяться границы пакетов. Наибольший результат сложения может быть получен, когда соответствующие пакеты точно совмещены. Предполагаемые пакеты могут иметь сдвиг на один или несколько срезов (в одном из вариантов осуществления на число срезов между пакета), и в этом случае операция сложения может применяться к пакетам со сдвигом для определения границ пакетов. Тем не менее, подразумевается, что существует несколько способов обнаружения пакетов и определения их границ. Подразумевается, что все такие способы предусмотрены вариантами осуществления настоящего изобретения. Также подразумевается, что после обнаружения границ пакетов отношение сигнал-шум повышается при только при рассмотрении пакета, при этом единственным присутствующим шумом является шум внутри пакета, а весь шум вне границ пакета может устраняться или в значительной мере ослабляться.
Схема модуляции: БФМн
Пакет необязательно должен кодироваться и декодироваться методом ЧМн. В одном из вариантов осуществления могут использоваться другие формы цифровой модуляции, такие как, например, двухпозиционная фазовая манипуляция (БФМн). При такой схеме кодирования символ 0 может кодироваться с использованием определенного числа циклов синусоидального сигнала, а символ 1 может кодироваться с использованием такого же числа циклов синусоидального сигнала, не совпадающего по фазе на π радиан. Например, пакет, закодированный методом БФМн, может содержать преамбулу и полезную нагрузку. Преамбула может содержать, например, семь нулей, за которыми следуют 1, 0, 1 и 0 (000000001010). Для обнаружения присутствия одного или нескольких пакетов путем сравнения записи срезов с заданной моделью срезов, представляющей преамбулу, могут использоваться описанные выше методы вещественной или комплексной корреляции. Эта операция обеспечивает обнаружение присутствия пакета и синхронизацию приемника 104 со стартовым битом преамбулы. Как отмечено выше, функция корреляции может дополнительно обеспечивать расчет фактической несущей частоты.
Итерационное декодирование
В одном из вариантов осуществления биты полезной нагрузки пакета могут по одному последовательно декодироваться в приемнике. Чтобы определить, является ли бит логическим нулем или логической единицей, могут использоваться последовательные корреляции с "нулевым шаблоном" и "единичным шаблоном", при этом лучший из двух результатов корреляции указывает значение бита. В одном из вариантов осуществления такой способ может использоваться для декодирования полезной нагрузки пакета, которая следует за его преамбулой, поскольку последовательность битов в полезной нагрузке чаще всего заранее неизвестна приемнику.
Арктангенс
В одном из вариантов осуществления в тех случаях, когда отношение сигнал-шум является приемлемым (например, около 0 дБ или выше), путем использования арктангенса срезов, содержащих предполагаемые пакеты можно обнаруживать присутствие или отсутствии пакета.
Стратегия поиска несущей частоты
В одном из вариантов осуществления после того, как в данных в виде срезов обнаружено присутствие одного или нескольких пакетов, чтобы определить частоту(-ы) модуляции пакетов, закодированных методом ЧМн или БФМн (например) или каким-либо другим методом при известном приблизительном расчете фактической частоты сигнала (скажем, в пределах 20 Гц, например, для типичного сигнала с частотой 20 кГц), величины корреляции преамбулы, например, могут определяться на каждой из 20 различных частот с приращениями 1 Гц (или менее). В одном из вариантов осуществления приблизительно расчетной несущей частотой(-ами) может являться номинальная частота(-ы), на которой рассчитан вести передачу передатчик. Такому обоснованному предположению в отношении диапазона частот, в котором вероятно находится фактический сигнал, могут способствовать определенные сведения о канале связи. В таком случае после того, как вычислена корреляция для каждой частоты в диапазоне частот, за несущую частоту (или одну из несущих частот) может безопасно приниматься частота, соответствующая наибольшей величине корреляции.
Постоянное обнаружение путем выравнивания фазы
Подразумевается, что могут применяться другие способы определения частоты обнаруженного пакета, не выходящие за объем описанных вариантов осуществления. Например, для каждого бита пакета могут определяться фазовые углы составляющего бит срезов. В одном из вариантов осуществления фазовые углы могут определяться путем использования арктангенса (соотношения синусоидального компонент и косинусоидального компонента) каждого среза. Такой способ может быть лучше всего реализован, когда отношение сигнал-шум превышает заданный порог, такой как, например, около 0 дБ. В случае модуляции методом БФМн такой фазовый угол может составлять от 0 до 2π в виде пилообразной развертки. Присутствие такой пилообразной формы предполагает, что срезы, образующие биты, исследуемые с использованием полярного представления на фиг. 7, не совмещены, как срезы 1, 2, 3 и 4 на фиг. 7. Как показано на фиг. 8, когда углы деформирования образуют более или менее прямую линию (в отличие от пилообразной формы) на тестируемой частоте, эта частота являться фактической частотой интересующего сигнала или близкой к ней частотой. В случае БФМн, например, углы деформирования сдвинуты от одного угла деформирования к другому углу деформирования, который является признаком частоты БФМн, на которой были закодированы данные. В таком случае полученная форма может напоминать меандр, из которого можно легко вывести данные.
Схема модуляции: МЧМн
При использовании способов, сходных с описанными ранее, можно обнаруживать и декодировать данные, закодированные с использованием других видов модуляции, путем использования только описанных сохраненных срезов и функции деформирования. Например, данные в срезах могут быть закодированы с использованием, например, многопозиционной частотной манипуляции (МЧМн), например, на 4 частотах или, например, 16 частотах, представляющих различные символы. В этом случае каждый символ может содержать информационные биты, закодированные на одной или нескольких частотах (например, одной или двух) из множества (например, 16) частот, и потенциально представляет несколько битов. Данные, закодированные с использованием модуляции других видов, могут декодироваться с использованием только информации о срезах (а не исходных данных из АЦП 110, которые были уже отброшены) и описанных функций деформирования и объединения срезов. Кроме того, данные, закодированные с использованием сочетаний модуляций различных видов, также могут обнаруживаться и декодироваться и в этом случае использованием только информации о срезах и функций деформирования и объединения срезов. Например, закодированные с использованием сочетания МЧМн и БФМн, могут декодироваться из сохраненных данных в виде срезов.
В каждом случае вычислительная нагрузка контроллер 112 приемника 104 является меньшей, чем в противном случае, если бы контроллеру 112 пришлось повторно обрабатывать поток исходных необработанных данных. По аналогичным причинам требуемый объем памяти контроллера 112 приемника является на несколько порядком величин меньшим, чем в случае, если бы требовалось сохранять исходные необработанные поступающие. данные с целью дальнейшего оперирования с ними во время обнаружения и декодирования..
Одноразрядный АЦП
В ситуациях особо низкого отношения сигнал-шум может быть выгодным использовать в приемнике 104 аналоговый компаратор или одноразрядный АЦП для квантования сигнала как находящегося ниже или выше заданного порога (закодированного в виде двух величин: +1 и -1). В вариантах осуществления этим способом значительно уменьшается количество данных, которые хранятся в конструкции срезов, по сравнению с сохранением многоразрядных представлений сигнала. Компаратор или одноразрядный АЦП может выгодно использоваться в ситуациях с низким отношением сигнал-шум, поскольку он позволяет осуществлять выборку с очень высокой частотой и при этом вычислять срезы в быстродействующем цикле реального времени на обычном процессоре. В цикле реально: о времени операции умножения значительно упрощены, поскольку одним из операндов является +1 или -1.
На фиг. 12 показана логическая блок-схема способа согласно одному из вариантов осуществления. Показано, что на шаге В121 принимается сигнал, в котором закодирован один или несколько пакетов данных. На шаге В122 принятый сигнал может быть дискретизирован в АЦП с целью получения дискретных значений. На шаге В123 может генерироваться и сохраняться в памяти срез, каждый из которых содержит пару значений, представляющих выбранный временной интервал среза. На шаге В124 в сохраненных срезах обнаруживаются и декодируются пакеты данных с использованием различных сочетаний операций деформирования и объединения срезов.
На фиг. 13 показана логическая блок-схема способа согласно одному из вариантов осуществления. Показано, что на шаге В131 может приниматься сигнал, в котором закодирован пакет данных на первой частоте. Затем на шаге В132 принятый сигнал может быть дискретизирован в АЦП с целью генерирования дискретных значений. Дискретные значения, запрошенные на шаге В133, могут быть коррелированы с первым и вторым шаблонами значений, полученных на второй частоте, которая может отличаться от частоты, с целью генерирования срезов на второй частоте. Согласно одному из вариантов осуществления и, как описано и проиллюстрировано выше, первый шаблон может генерироваться с использованием первой эталонной функции, а второй шаблон может генерироваться с использованием второй эталонной функции со сдвигом по фазе на 90 градусов относительно первой эталонной функции. На шаге В134 некоторые или все срезы на второй частоте частота могут трансформироваться (и также "деформироваться") в срезы на второй частоте (также частоте "freqRef) плюс или минус сдвиг (также "freqDelta"). На шаге В135 путем объединения трансформированных (деформированных) срезов может генерироваться фильтр со средней частотой на второй частоте плюс или минус сдвиг.
В одном из вариантов осуществления затем на шаге В136 может определяться, находится ли первая частота (интересующая частота, на которой закодирован(-ы) пакет(-ы) данных, в полосе пропускания генерированного фильтра. Если первая частота действительно находится в полосе пропускания генерированного таким способом фильтра, могут выполняться дальнейшие шаги, такие как, например, шаги обнаружения и декодирования, подробно описанные в изобретении. Если первая частота не находится в полосе пропускания генерированного фильтра, шаги трансформации (деформирования) и генерирования фильтра (объединения срезов) могут многократно повторяться с использованием соответственно различных сдвигов до тех пор, пока первая частота в действительности не окажется в полосе пропускания фильтра согласно ветви "Нет" шага В136.
Хотя выше описаны некоторые варианты осуществления, они представлены лишь в качестве примера и не имеют целью ограничить объем изобретения. В действительности, новые способы, устройства и системы, описанные в изобретении, могут быть воплощены в разнообразных других формах. Кроме того, различные признаки различные описанных способов и систем могут быть опущены, заменены и изменены в пределах существа изобретения. Подразумевается, что такие разновидности или модификации в пределах объема и существа изобретения входят в сопровождающую формулу изобретения и ее эквиваленты имеют. Например, специалисты в данной области техники учтут, что в различных вариантах осуществления фактические физические и логические структуры могут отличаться от показанных на чертежах. В зависимости от варианта осуществления некоторые шаги, описанные в выше, могут быть исключены, а другие шаги могут быть добавлены. Кроме того, признаки и особенности конкретных описанных выше вариантов осуществления могут сочетаться различными способами, образуя дополнительные варианты осуществления, все из которых входят в объем настоящего изобретения. Хотя в настоящем изобретении предложены некоторые предпочтительные варианты осуществления и применения, в его объем также входят другие варианты осуществления, известные специалистам в данной области техники, включая варианты осуществления, в которых не используются все описанные в изобретении признаки и преимущества. Соответственно, предполагается, что объем настоящего изобретения определяется только прилагаемой формулой изобретения.
Выше были рассмотрены варианты осуществления настоящего изобретения. Также возможны дополнительные варианты осуществления систем и устройств, считывающих и выполняющих программы, записанные в запоминающем устройстве, с целью осуществления функций описанного варианта(-ов) осуществления, и способа, шаги которого осуществляются, например, путем считывания и выполнения программы, записанной в запоминающем устройстве, с целью осуществления функций описанного варианта(-ов) осуществления. С этой целью система или устройство (например, приемник) могут получать программу, например по сети или с носителя записи различных типов (например, машиночитаемого носителя), служащего запоминающим устройством.
Настоящее изобретение может быть охарактеризовано следующими пунктами. Подразумевается, что признаки, перечисленные в следующих далее пунктах, являются взаимозаменяемыми. Иными словами, признаки пунктов могут сочетаться с целью определения объема изобретения.
Пункты
1. Способ, включающий:
прием сигнала, в котором закодирован пакет данных,
дискретизацию принимаемого сигнала,
генерирование и сохранение множества срезов, содержащих пары значений для каждого из заданного числа выборок сигнала, и
обнаружение присутствия и декодирование пакета данных из сохраненных срезов.
2. Способ по п. 1, в котором генерирование каждого из множества срезов включает:
корреляцию выборок сигнала с первым контрольным шаблоном,
генерирование первого значения из пары значений,
корреляцию заданного числа выборок сигнала со вторым контрольным шаблоном, и
генерирование второго значения из пары значений.
3. Способ по п. 2, в которой первый контрольный шаблон представляет собой косинусоидальную функцию на опорной частоте, а второй контрольный шаблон представляет собой синусоидальную функцию на опорной частоте.
4. Способ по любому из пп. 1-3, дополнительно включающий формирование фильтра путем объединения определенного числа из множества срезов.
5. Способ по любому из пп. 1-4, в котором обнаружение присутствия пакета включает обнаружение несущей частоты в полосе пропускания фильтра, сформированного множеством срезов.
6. Способ по любому из пп. 1-4, в котором обнаружение присутствия пакета включает обнаружение несущей частоты в полосе пропускания фильтра, сформированного путем объединения срезов.
7. Способ по любому из пп. 4-6, в котором обнаружение дополнительно включает перенастройку средней частоты фильтра с первой средней частоты на вторую среднюю частоту, отличающуюся от первой средней частоты, с использованием сохраненных срезов.
8. Способ по п. 7, в котором перенастройка средняя частота фильтра включает деформирование срезов, из которых сформирован фильтр, путем поворота соответствующих пар их значений на определенную величину.
9. Способ по п. 8, в котором величиной является угол поворота, коэффициент масштабирования и номера, присвоенные срезам, из которых сформирован фильтр.
10. Способ по п. 8, в котором величиной является сумма фазового угла относительно опорной частоты и произведения угла поворота и номера среза.
11. Приемник сигналов, содержащий:
аналого-цифровой преобразователь (АЦП), сконфигурированный на дискретизацию принимаемого сигнала,
память,
контроллер, связанный с памятью и сконфигурированный на:
генерирование и сохранение в памяти среза, содержащего пару значений, заданного числа выборок сигнала,
обнаружение присутствия и декодирования пакета данных из сохраненных срезов.
12. Приемник по п. 11, в котором память сконфигурирована на хранение по меньшей мере первого контрольного шаблона и второго контрольного шаблона, а контроллер дополнительно сконфигурирован на корреляцию заданного числа циклов дискретизированного сигнала с первым контрольным шаблоном с целью генерирования первого значения из пары значений и корреляцию заданного числа выборок сигнала со вторым контрольным шаблоном с целью генерирования второго значения из пары значений.
13. Приемник по п. 11 или 12, в котором контроллер дополнительно сконфигурирован на объединение нескольких срезов с целью формирования фильтра.
14. Приемник по п. 13, в котором полоса пропускания фильтра зависит от числа объединенных срезов.
15. Приемник по любому из пп. 11-14, в котором контроллер дополнительно сконфигурирован на обнаружение присутствия пакета путем обнаружения несущей частоты в полосе пропускания фильтра, сформированного путем объединения срезов.
16. Приемник по любому из пп. 13-15, в котором контроллер дополнительно сконфигурирован на перенастройку с использованием сохраненных срезов средней частоты фильтра с первой средней частоты на вторую среднюю частоту, отличающуюся от первой средней частоты.
17. Приемник по любому из пп. 11-16, в котором в сигнале закодированы пакеты данных на первой частоте, а контроллер дополнительно сконфигурирован на:
корреляцию выборок с первым и вторым шаблонами значений, полученных на второй частоте, отличающейся от первой частоты, с целью генерирования множества срезов, каждый из которых содержит пару значений,
трансформацию по меньшей мере некоторых из множества срезов на второй частоте в срезы на второй частоте плюс или минус сдвиг, и
генерирование фильтра со средней частотой на второй частоте плюс или минус сдвиг путем объединения трансформированных срезов.
18. Способ, включающий:
прием сигнала, в котором закодирован пакет данных на первой частоте,
дискретизацию сигнала с целью генерирования дискретных значений,
корреляцию дискретных значений с первым и вторым шаблонами значений, полученных на второй частоте, отличающейся от первой частоты, с целью генерирования множество срезов на второй частоте, каждый из которых содержит пару значений,
трансформацию по меньшей мере некоторых из множества срезов на второй частоте в срезы на второй частоте плюс или минус сдвиг, и
генерирование фильтра со средней частотой на второй частоте плюс или минус сдвиг путем объединения трансформированных срезов.
19. Способ по п. 18, дополнительно включающий определение того, находится ли первая частота в полосе пропускания генерированного фильтра.
20. Способ по п. 19, дополнительно включающий итерационную трансформацию, генерирование и определение с использованием соответственно различных сдвигов до тех пор, пока первая частота не окажется в полосе пропускания фильтра.
21. Способ, включающий:
прием сигнала, в котором закодирован пакет данных,.
дискретизацию сигнала с целью генерирования дискретных значений,
генерирование записи срезов, содержащей множество срезов, путем корреляции дискретных значений с первым и вторым контрольными шаблонами, при этом первый контрольный шаблон содержит первую эталонную функцию, а второй контрольный шаблон содержит вторую эталонную функцию со сдвигом по фазе на 90 градусов относительно первой эталонной функции,
автокорреляцию части записи срезов с задержанной частью записи срезов с целью генерирования членов автокорреляции, и
определение того, когда величины членов автокорреляции превышают заданный порог для заданного числа членов автокорреляции.
22. Способ по п. 21, дополнительно включающий определение несущей частоты принимаемого сигнала.
23. Способ по п. 22, в котором определение включает:
деформирование по меньшей мере некоторых из множества срезов путем сдвига частоты,
генерирование фильтра из деформированных срезов, и
определение того, находится ли несущая частота в полосе пропускания генерированного фильтра.
24. Способ, включающий:
прием сигнала, в котором закодирован пакет данных,
дискретизацию сигнала с целью генерирования дискретных значений,
генерирование из дискретных значений записи срезов, содержащей множество срезов, путем корреляции дискретных значений с первым и вторым контрольными шаблонами, при этом первый контрольный шаблон содержит первую эталонную функцию, а второй контрольный шаблон содержит вторую эталонную функцию со сдвигом по фазе на 90 градусов относительно первой эталонной функции,
взаимную корреляцию записи срезов с хранящимся шаблоном с целью генерирования членов взаимной корреляции, и
определение того, превышает ли величина членов взаимной корреляции заданный порог длительности хранящегося шаблона.
25. Способ по п. 24, в котором первый контрольный шаблон представляет собой косинусоидальную функцию, а второй контрольный шаблон представляет собой синусоидальную функцию.
26. Способ по п. 24, дополнительно включающий определение несущей частоты принимаемого сигнала.
27. Способ, включающий:
прием сигнала,
дискретизацию сигнала с целью генерирования дискретных значений,
корреляцию дискретных значений с заданными первым и вторым шаблонами значений, полученных на первой частоте, с целью генерирования множество срезов на первой частоте,
трансформацию по меньшей мере некоторых из генерированного множества срезов на первой частоте в срезы на второй частоте, отличающейся от первой частоты,
генерирование первого фильтра из срезов на второй частоте,
трансформацию по меньшей мере некоторых из генерированного множества срезов на первой частоте в срезы на третьей частоте, отличающейся от первой и второй частот, и
генерирование второго фильтра из срезов на третьей частоте.
28. Способ по п. 27, дополнительно включающий отбрасывание генерированных дискретных значений принимаемого сигнала после генерирования множества срезов на первой частоте.
29. Способ по п. 27 или 28, дополнительно включающий обнаружение первой несущей частоты в полосе пропускания первого фильтра и обнаружение второй несущей частоты в полосе пропускания второго фильтра.
30. Способ, включающий:
прием сигнала, в котором закодирован пакеты данных,
дискретизацию сигнала с целью генерирования дискретных значений,
генерирование из дискретных значений записи срезов, содержащей множество срезов, путем корреляции дискретных значения с первым и вторым контрольными шаблонами, при этом первый контрольный шаблон содержит первую эталонную функцию, а второй контрольный шаблон содержит вторую эталонную функцию со сдвигом по фазе на 90 градусов относительно первой эталонной функции,
автокорреляцию части записи срезов, охватывающей по меньшей мере две преамбулы закодированных пакетов данных, с ее задержанной частью с целью генерирования членов автокорреляции, и
определение, когда величины членов автокорреляции превышают заданный порог для заданного числа членов автокорреляции.
31. Способ по п. 30, дополнительно включающий определение границ пакетов данных на основании величин членов автокорреляции.
32. Способ по п. 30 или 31, в котором несущая частота сигнала обнаруживается, когда последовательные фазовые углы на протяжении биток пакета данных в наименьшей степени сходны с первой заданной моделью и в наибольшей степени сходны со второй заданной моделью.
33. Программа, при выполнении которой компьютер осуществляет способ по любому из пп. 1-10 и 18-32.
34. Программа, при выполнении которой компьютер действует как приемник по любому из пп. 11-17.
35. Носитель данных, на котором хранится программа по п. 33 или 34.
Соответственно, выше лишь проиллюстрированы принципы изобретения. Следует учесть, что специалисты в данной области техники могут предложить различные модификации, которые, хотя они в прямой форме не описаны и не проиллюстрированы в изобретении, воплощают его принципы и входят в пределы его сущности и объема. Кроме того, все приведенные примеры и формулировки в основном имеют целью помочь в понимании принципов изобретения и вклада в авторов изобретения в развитие техники и должны считаться не ограничивающими применительно к таким конкретным примерам и формулировкам. Помимо этого, подразумевается, что все упоминания принципов и особенностей изобретения, а также его конкретных примеров включают их как конструктивные, так функциональные эквиваленты. Кроме того, подразумевается, что такие эквиваленты включают как известные в настоящее время эквиваленты, так и эквиваленты, созданные в будущем, т.е. любые созданные элементы, которые выполняют такую же функцию независимо от конструкции. Соответственно, подразумевается, что объем настоящего изобретения не ограничен проиллюстрированными и описанными примерами его особенностей. Напротив, объем и сущность настоящего изобретения воплощены в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ, УСТРОЙСТВА И СИСТЕМЫ ПРИЕМА И ДЕКОДИРОВАНИЯ СИГНАЛОВ В ПРИСУТСТВИИ ШУМА С ИСПОЛЬЗОВАНИЕМ СРЕЗОВ И ДЕФОРМИРОВАНИЯ | 2014 |
|
RU2736776C2 |
| СИСТЕМА И СПОСОБ ВНУТРИПОЛОСНОГО МОДЕМА ДЛЯ ПЕРЕДАЧИ ДАННЫХ ПО ЦИФРОВЫМ БЕСПРОВОДНЫМ СЕТЯМ СВЯЗИ | 2009 |
|
RU2470464C2 |
| СИСТЕМА И СПОСОБ ВНУТРИПОЛОСНОГО МОДЕМА ДЛЯ ПЕРЕДАЧИ ДАННЫХ В ЦИФРОВЫХ СЕТЯХ БЕСПРОВОДНОЙ СВЯЗИ | 2009 |
|
RU2474062C2 |
| ПОИСК СОТЫ УЗКОПОЛОСНОЙ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2689989C1 |
| СИСТЕМА И СПОСОБ ВНУТРИПОЛОСНОГО МОДЕМА ДЛЯ ПЕРЕДАЧ ДАННЫХ ПО ЦИФРОВЫМ БЕСПРОВОДНЫМ СЕТЯМ СВЯЗИ | 2009 |
|
RU2496242C2 |
| СПОСОБ ГЕНЕРАЦИИ КАДРОВ МАСКИРОВАНИЯ В СИСТЕМЕ СВЯЗИ | 2006 |
|
RU2407071C2 |
| СПОСОБ КОНКАТЕНАЦИИ КАДРОВ В СИСТЕМЕ СВЯЗИ | 2006 |
|
RU2417457C2 |
| СПОСОБ ВЗВЕШЕННОГО СЛОЖЕНИЯ С ПЕРЕКРЫТИЕМ | 2006 |
|
RU2405217C2 |
| РАДИОПРИЕМНИК ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА СИГНАЛА | 2016 |
|
RU2669700C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ВНУТРИПОЛОСНОГО МОДЕМА ДЛЯ ПЕРЕДАЧИ ДАННЫХ ПО СЕТЯМ ЦИФРОВОЙ БЕСПРОВОДНОЙ СВЯЗИ | 2009 |
|
RU2477931C2 |
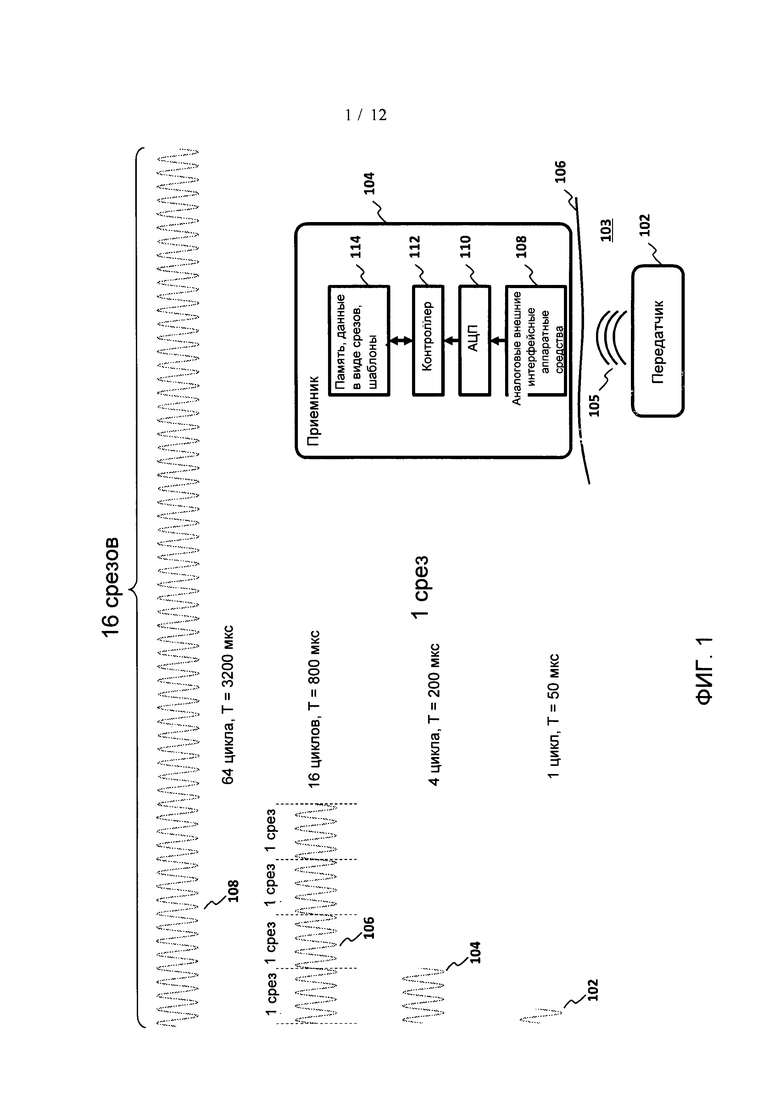
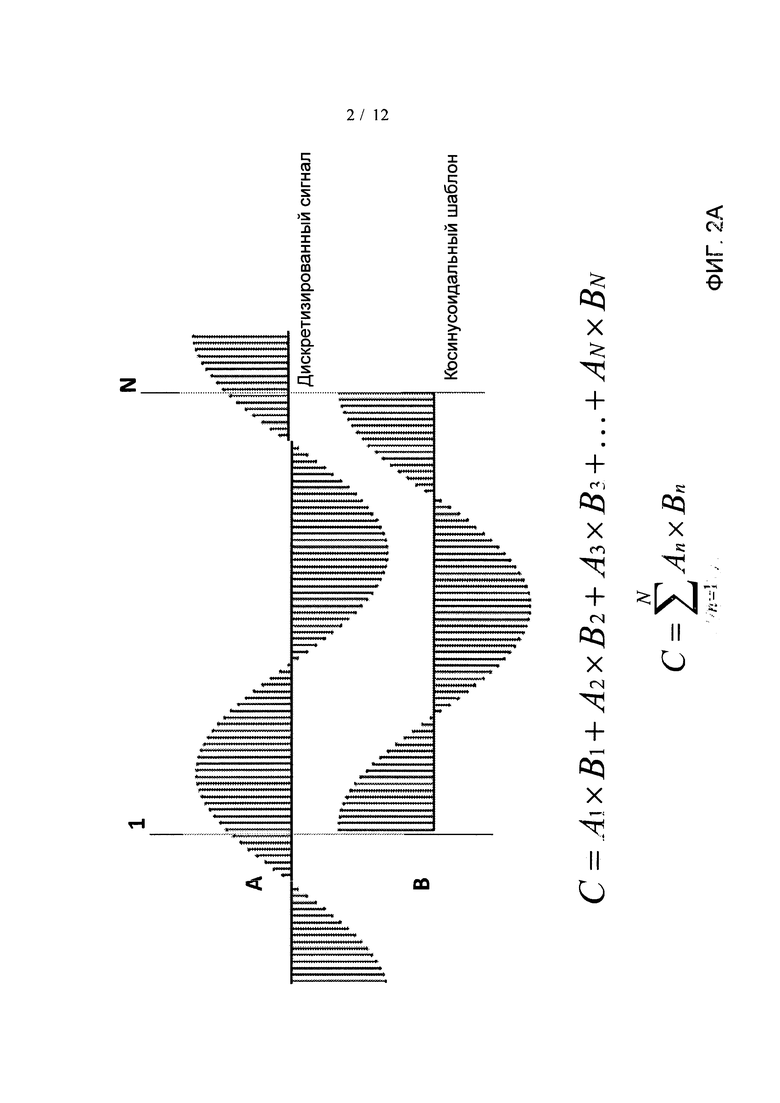
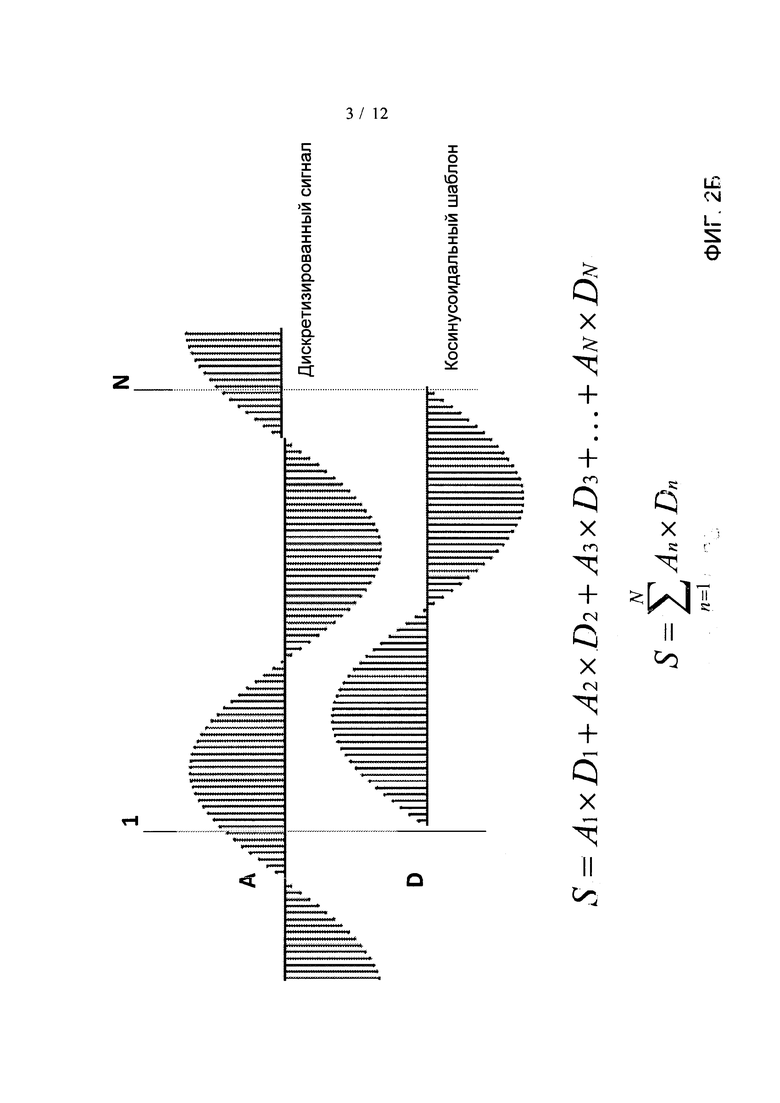

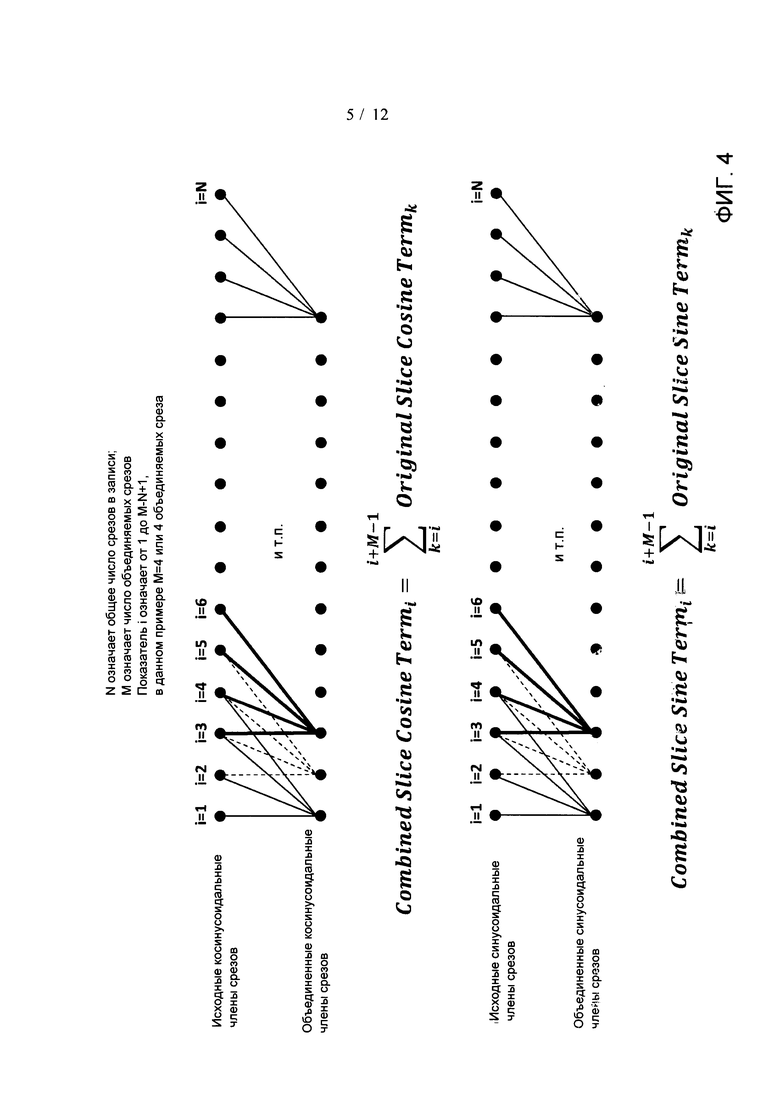
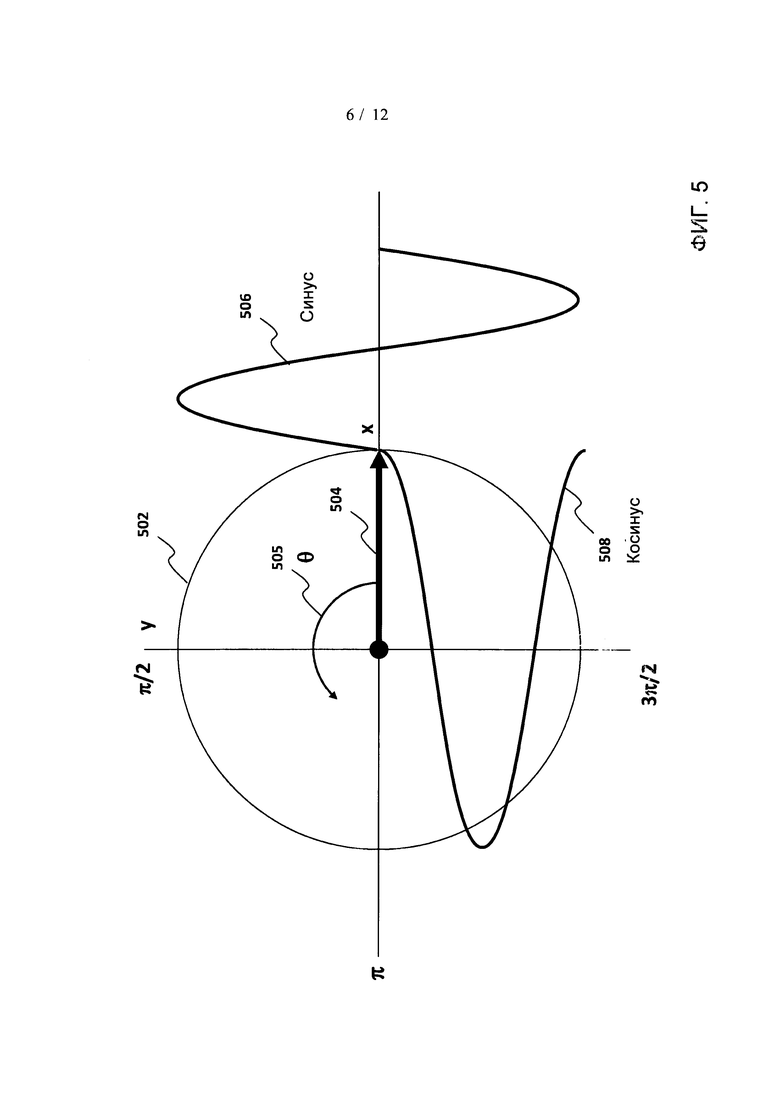
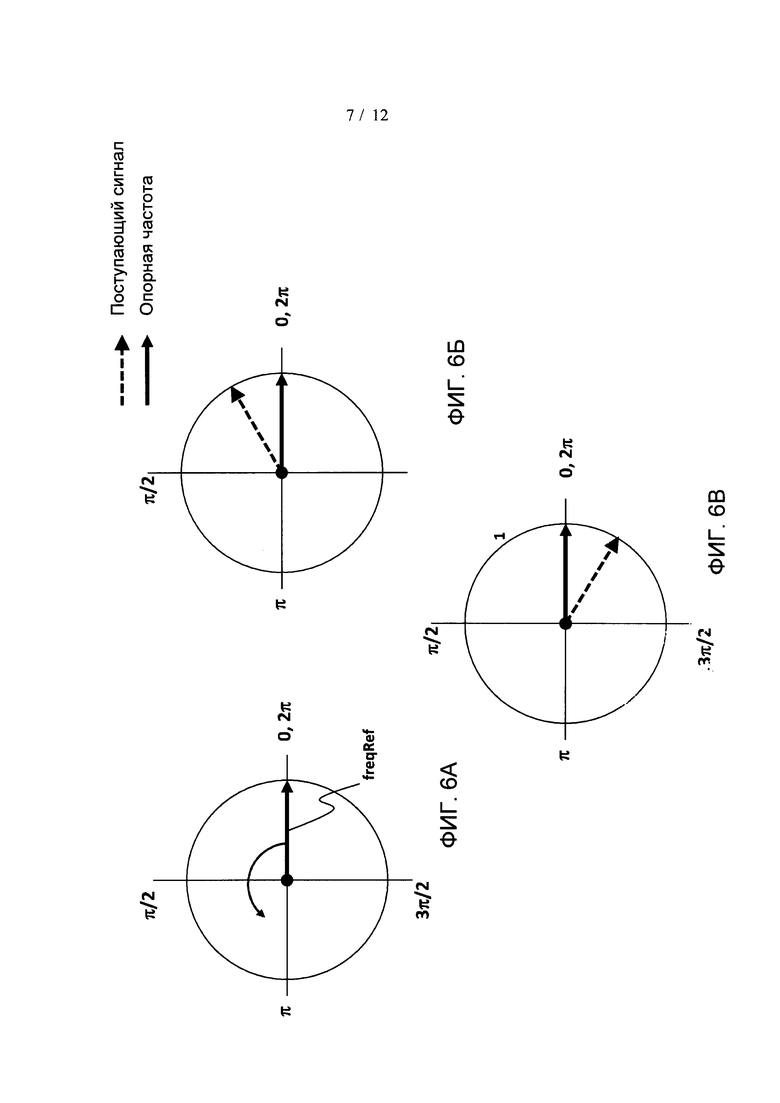
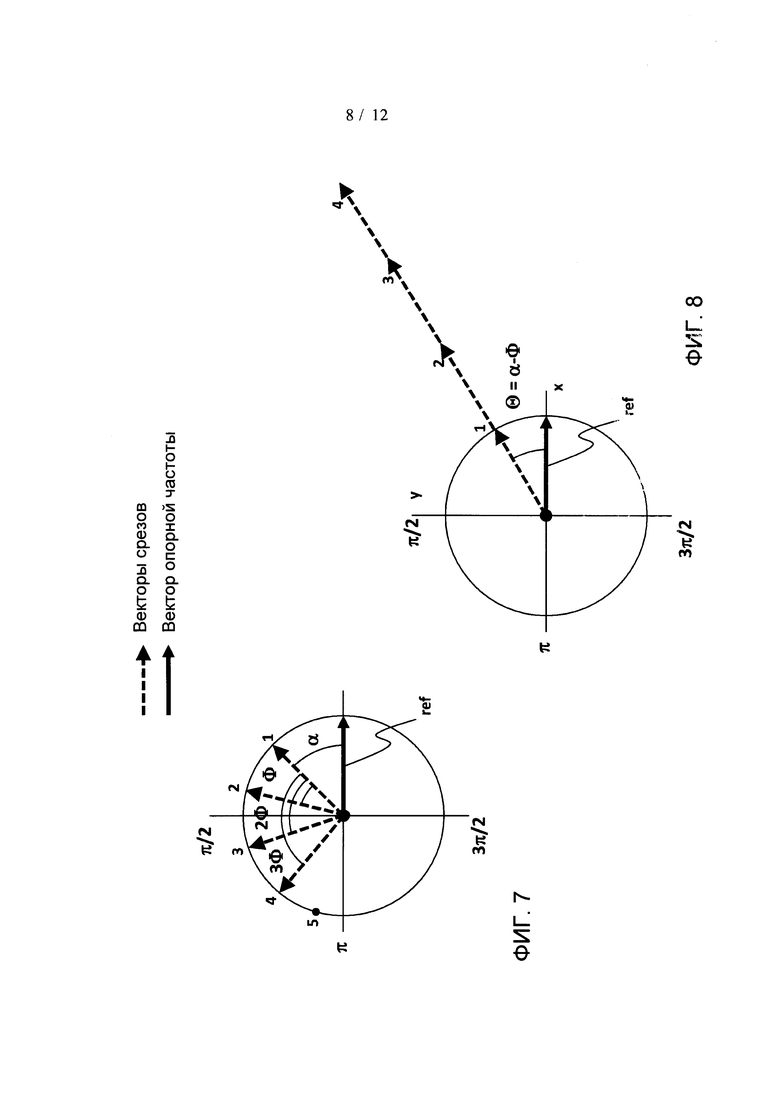
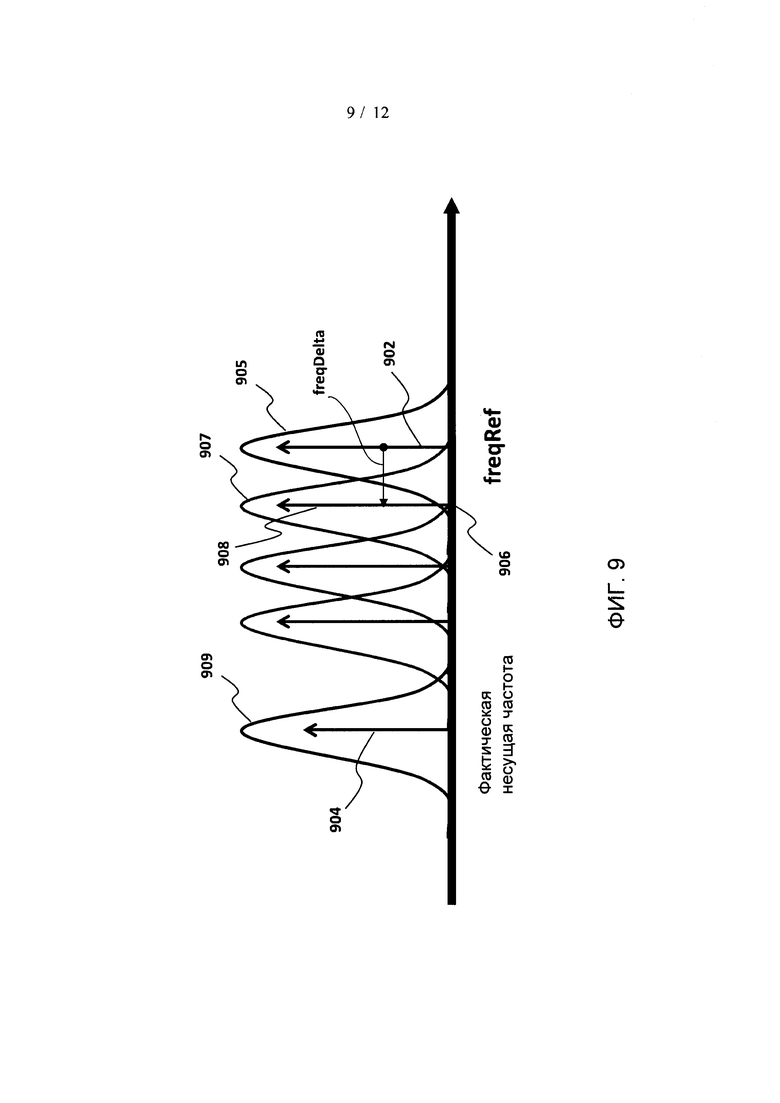
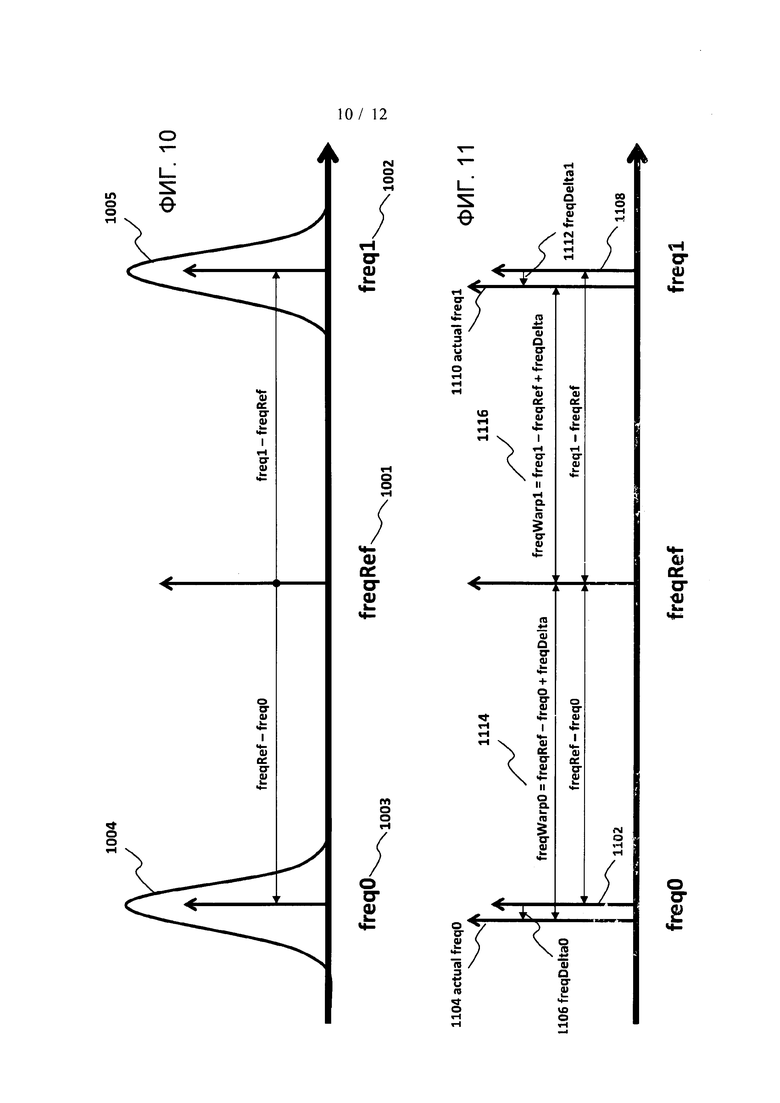
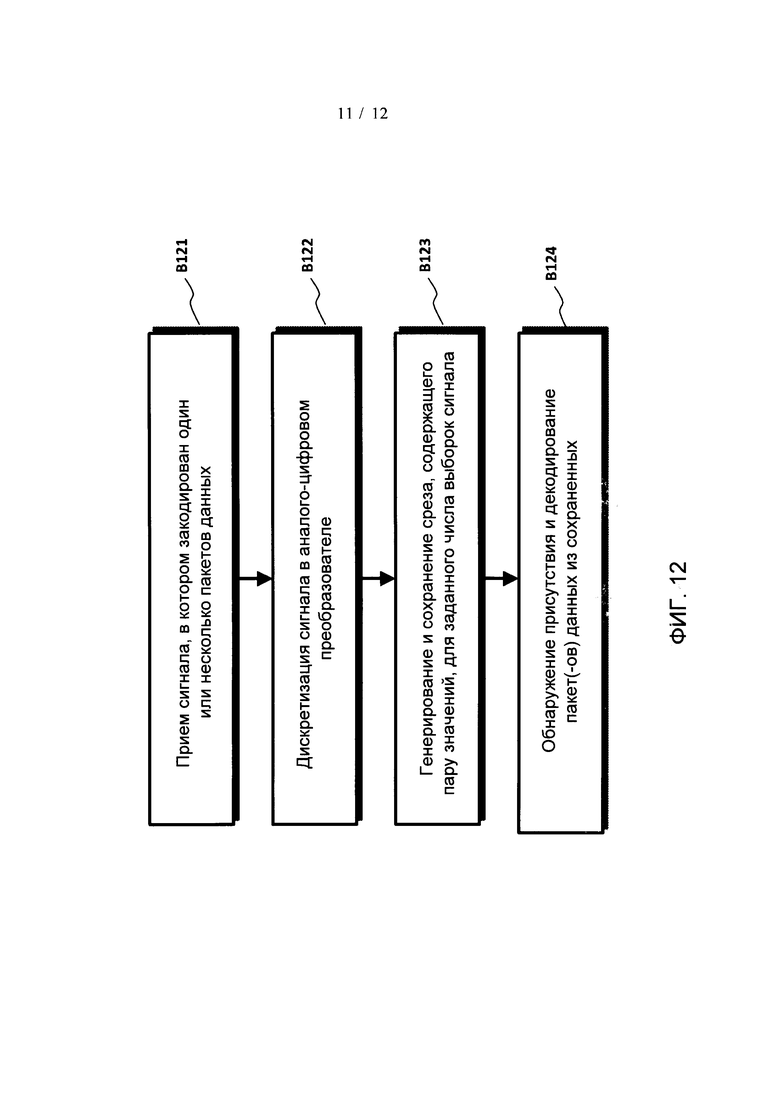
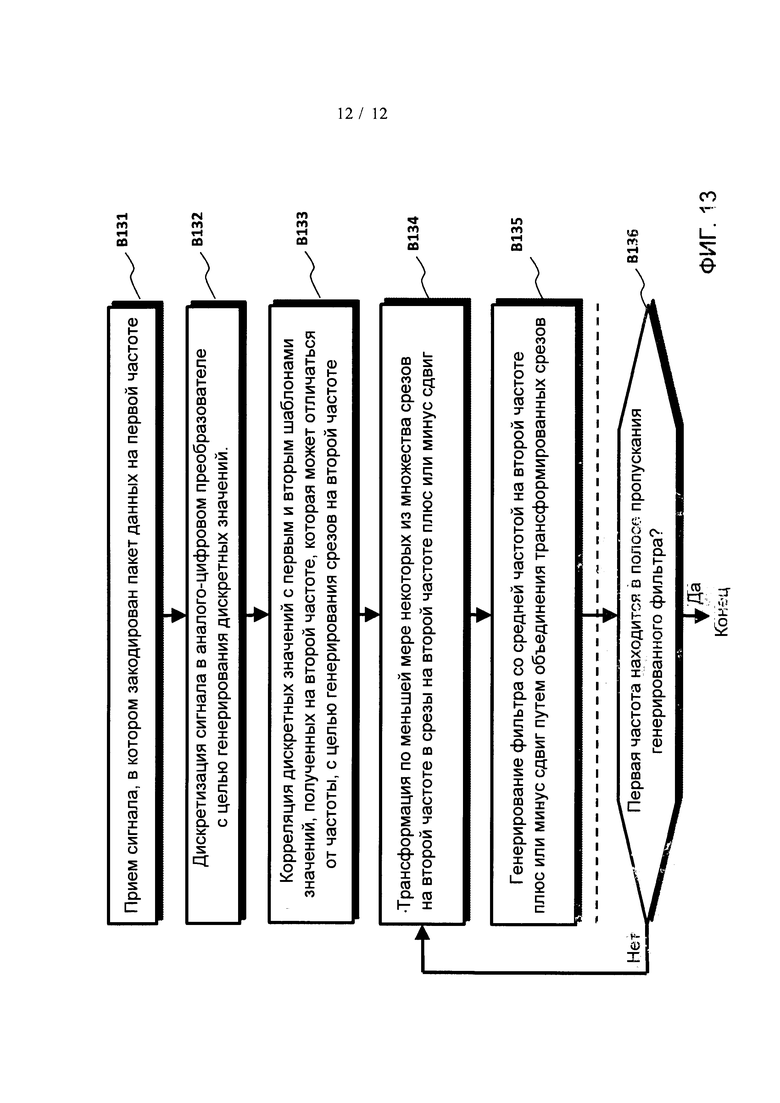
Изобретение относится к области радиоприема и может быть использовано для приема и декодирования сигналов в присутствии шума с использованием срезов. Способ приема включает прием и дискретизацию сигнала, в котором закодирован пакет данных. Посредством контроллера генерируется и сохраняется срез, содержащий пару значений для каждого из заданного числа выборок сигнала. Из сохраненных срезов обнаруженный пакет декодируют. Посредством контроллера из множества срезов посредством их объединения формируют фильтр, имеющий установленную полосу пропускания. Средняя частота фильтра перенастраивается с первой средней частоты на вторую среднюю частоту деформированием сохраненных срезов, из которых сформирован фильтр, путем поворота соответствующих пар их значений на определенную величину. Технический результат – повышение эффективности обнаружения и декодирования принимаемого сигнала. 2 н. и 27 з.п. ф-лы, 13 ил.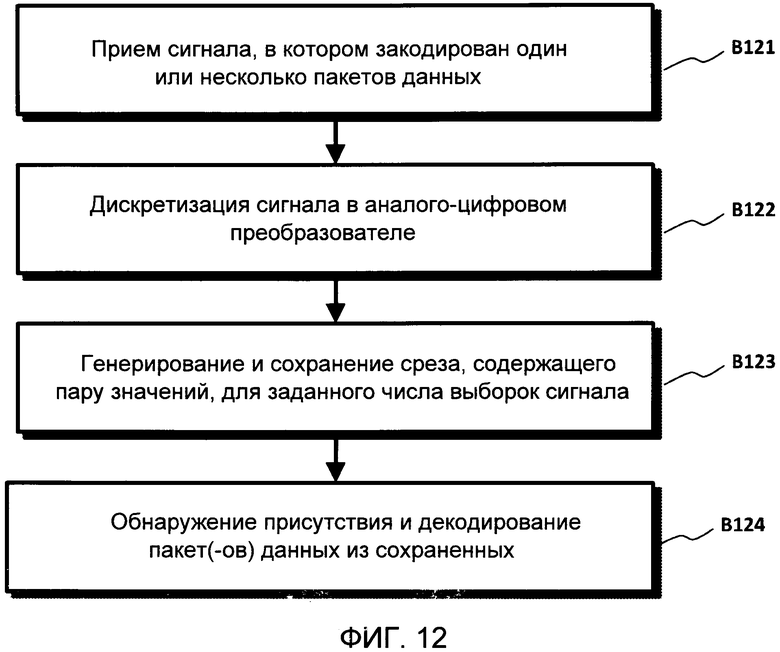
1. Способ, включающий:
прием сигнала аналоговым внешним интерфейсным аппаратным средством приемника, в котором закодирован пакет данных,
дискретизацию полученного сигнала аналого-цифровым преобразователем;
генерирование контроллером и сохранение контроллером в памяти, связанной с контроллером, множества срезов, содержащих пары значений для каждого из выбранного числа выборок сигнала;
обнаружение контроллером присутствия и декодирование контроллером пакета данных из сохраненных срезов;
формирование контроллером фильтра, имеющего установленную пропускающую полосу, путем объединения контроллером определенного числа из множества срезов;
и перенастройку контроллером средней частоты фильтра с первой средней частоты на вторую среднюю частоту, отличающуюся от первой средней частоты, с использованием сохраненных срезов деформированием сохраненных срезов, из которых сформирован фильтр, путем поворота соответствующих пар их значений на определенную величину.
2. Способ по п. 1, в котором генерирование и сохранение контроллером выполняется по мере дискретизации принимаемого сигнала.
3. Способ по п. 1, дополнительно включающий отбрасывание контроллером дискретизированного сигнала по мере генерирования и сохранения срезов.
4. Способ по п. 1, в котором генерирование и сохранение контроллером выполняется с использованием составляющих значений каждого из срезов, генерируемых с использованием первой эталонной функции и второй эталонной функции со сдвигом по фазе на 90 градусов относительно первой эталонной функции.
5. Способ по п. 1, в котором генерирование контроллером каждого из множества срезов включает:
корреляцию контроллером выборок сигнала с первым контрольным шаблоном,
генерирование контроллером первого значения из пары значений,
корреляцию контроллером выбранного числа выборок сигнала со вторым контрольным шаблоном, и
генерирование контроллером второго значения из пары значений.
6. Способ по п. 5, в котором первый контрольный шаблон представляет собой косинусоидальную функцию на опорной частоте, а второй контрольный шаблон представляет собой синусоидальную функцию на опорной частоте.
7. Способ по п. 6, в котором первое значение из пары значений среза представляет собой скалярное произведение дискретизированного сигнала и косинусоидальной функции на опорной частоте, а второе значение из пары значений среза представляет собой скалярное произведение дискретизированного сигнала синусоидальной функции на опорной частоте.
8. Способ по п. 1, в котором полоса пропускания фильтра зависит от числа объединенных срезов.
9. Способ по п. 8, в котором при объединении первого числа срезов фильтр имеет первую полосу пропускания, а при объединении второго числа срезов, превышающего первое число срезов, фильтр имеет вторую полосу пропускания, более узкую, чем первая полоса пропускания.
10. Способ по п. 1, в котором обнаружение контроллером присутствия пакета данных, содержащего обнаружение контроллером несущей частоты в установленной полосе пропускания фильтра, сформированного путем объединения срезов.
11. Способ по п. 1, в котором обнаружение контроллером дополнительно включает перенастройку контроллером средней частоты фильтра с первой средней частоты на вторую среднюю частоту, отличающуюся от первой средней частоты, с использованием сохраненных срезов.
12. Способ по п. 1, в котором величиной является угол поворота, коэффициент масштабирования и соответствующие номера, присвоенные срезам, из которых сформирован фильтр.
13. Способ по п. 1, в котором величиной является сумма фазового угла относительно опорной частоты и произведения угла поворота и номера среза.
14. Приемник сигналов, содержащий:
аналоговое внешнее интерфейсное аппаратное средство, сконфигурированное на прием сигнала, в котором закодирован пакет данных,
аналого-цифровой преобразователь (АЦП), сконфигурированный на генерирование дискретных значений принимаемого сигнала,
память,
контроллер, связанный с памятью и сконфигурированный на: генерирование и сохранение в памяти среза, содержащего пару значений для каждого из выбранного числа выборок сигнала;
обнаружение присутствия и декодирование пакета данных из сохраненных срезов;
объединение определенного числа срезов с целью формирования фильтра, имеющего установленную пропускающую полосу;
и перенастройку средней частоты фильтра деформированием срезов, из которых сформирован фильтр, путем поворота соответствующих пар их значений на определенную величину.
15. Приемник сигналов по п. 14, в котором контроллер сконфигурирован на генерирование и сохранение срезов по мере дискретизации АЦП принимаемого сигнала.
16. Приемник сигналов по п. 14, в котором контроллер дополнительно сконфигурирован на отбрасывание дискретизированного сигнала по мере генерирования и сохранения срезов.
17. Приемник сигналов по п. 14, в котором контроллер дополнительно сконфигурирован на генерирование каждого из срезов таким образом, чтобы генерировать их составляющие значения с использованием первой эталонной функции и второй эталонной функции со сдвигом по фазе на 90 градусов относительно первой эталонной функции.
18. Приемник сигналов по п. 14, в котором память сконфигурирована на сохранение по меньшей мере первого контрольного шаблона и второго контрольного шаблона, а контроллер дополнительно сконфигурирован на корреляцию выбранного числа циклов дискретизированного сигнала с первым контрольным шаблоном с целью генерирования первого значения из пары значений и корреляцию выбранного числа выборок сигнала со вторым контрольным шаблоном с целью генерирования второго значения из пары значений.
19. Приемник сигналов по п. 18, в котором первый контрольный шаблон содержит первую эталонную функцию на опорной частоте, а второй контрольный шаблон представляет собой вторую эталонную функцию на опорной частоте.
20. Приемник сигналов по п. 19, в котором первая эталонная функция имеет сдвиг по фазе на 90 градусов относительно второй эталонной функции.
21. Приемник сигналов по п. 20, в котором первая эталонная функция представляет собой косинусоидальную функцию, а вторая эталонная функция представляет собой синусоидальную функцию.
22. Приемник сигналов по п. 21, в котором первое значение из пары значений среза представляет собой скалярное произведение дискретизированного сигнала и косинусоидальной функции на опорной частоте, а второе значение из пары значений среза представляет собой скалярное произведение дискретизированного сигнала и синусоидальной функции на опорной частоте.
23. Приемник сигналов по п. 14, в котором полоса пропускания фильтра зависит от числа объединенных срезов.
24. Приемник сигналов по п. 23, в котором при объединении первого числа срезов фильтр имеет первую полосу пропускания, а при объединении второго числа срезов, превышающего первое число срезов, фильтр имеет вторую полосу пропускания, более узкую, чем первая полоса пропускания.
25. Приемник сигналов по п. 14, в котором контроллер дополнительно сконфигурирован на обнаружение присутствия пакета данных путем обнаружения несущей частоты в полосе пропускания фильтра, сформированного путем объединения срезов.
26. Приемник сигналов по п. 14, в котором контроллер дополнительно сконфигурирован на перенастройку с использованием сохраненных срезов средней частоты фильтра с первой средней частоты на вторую среднюю частоту, отличающуюся от первой средней частоты.
27. Приемник сигналов по п. 14, в котором величиной является угол поворота, коэффициент масштабирования и соответствующие номера, присвоенные срезам, из которых сформирован фильтр.
28. Приемник сигналов по п. 27, в котором коэффициентом масштабирования является целое число.
29. Приемник сигналов по п. 27, в котором коэффициентом масштабирования является алгебраическое выражение.
| US 4333150 A, 28.01.1980 | |||
| US 2006268170 A1, 30.11 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 2010128175 A1, 27.05 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 2013194118 A1, 01.08 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 2003021166 A1, 30.01.2003 | |||
| EP 2063535 A1, 27.05.2009 | |||
| US 4513385 А, 31.01.1983 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНОГО СИГНАЛА С НЕИЗВЕСТНОЙ ЧАСТОТОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1998 |
|
RU2141730C1 |

