Область техники, к которой относится изобретение
[1] Настоящее изобретение относится к системе беспроводной связи, а более конкретно, к способу и устройству для доступа к каналу в системе на основе беспроводной LAN (WLAN).
Уровень техники
[2] Вследствие быстрого развития технологий обмена информацией разрабатываются различные системы на основе технологий беспроводной связи. WLAN-технология из числа технологий беспроводной связи обеспечивает возможность беспроводного доступа в Интернет дома или в организациях либо в конкретной области предоставления услуг с использованием мобильных терминалов, таких как персональное цифровое устройство (PDA), переносной компьютер, портативный мультимедийный проигрыватель (PMP) и т.д. на основе радиочастотной (RF) технологии.
[3] Чтобы исключать ограниченную скорость передачи данных, одно из преимуществ WLAN, последний технический стандарт предлагает усовершенствованную систему, допускающую повышение скорости и надежности сети при одновременном расширении зоны покрытия беспроводной сети. Например, Институт инженеров по электротехнике и радиоэлектронике (IEEE) 802.11n обеспечивает такую скорость обработки данных, чтобы поддерживать максимальную высокую пропускную способность (HT) в 540 Мбит/с. Помимо этого, технология со многими входами и многими выходами (MIMO) в последнее время применяется как к передающему устройству, так и к приемному устройству, с тем чтобы минимизировать ошибки при передаче, а также оптимизировать скорость передачи данных.
Сущность изобретения
Техническая задача
[4] Цель настоящего изобретения заключается в том, чтобы предоставлять способ и устройство для регулирования и управления расширенным межкадровым интервалом (EIFS) в системе на основе беспроводной LAN (WLAN), чтобы поддерживать защиту ответных кадров и поддерживать эффективность доступа к каналу.
[5] Следует понимать, что технические цели, которые должны достигаться посредством настоящего изобретения, не ограничены вышеуказанными техническими целями, и другие технические цели, которые не упоминаются в данном документе, должны становиться очевидными из нижеприведенного описания для специалистов в области техники, к которой относится настоящее изобретение.
Техническое решение
[6] В аспекте настоящего изобретения, цель настоящего изобретения может достигаться посредством предоставления способа для станции (STA) для доступа к каналу в системе на основе беспроводной локальной вычислительной сети, способ может содержать: прием кадра; и определение того, является или нет беспроводная среда бездействующей, с использованием временного интервала, указываемого посредством расширенного межкадрового интервала (EIFS), перед выполнением передачи в беспроводной среде, при этом EIFS задается равным динамическому значению на основе состояния циклического избыточного кода (CRC) поля SIGNAL-A (SIG-A) принимаемого кадра.
[7] В другом аспекте настоящего изобретения, устройство станции (STA) для доступа к каналу в системе на основе беспроводной локальной вычислительной сети, STA-устройство может содержать: приемо-передающее устройство; и процессор, при этом процессор выполнен с возможностью: управлять приемо-передающим устройством таким образом, чтобы принимать кадр; и определять то, является или нет беспроводная среда бездействующей, с использованием временного интервала, указываемого посредством расширенного межкадрового интервала (EIFS), перед выполнением передачи в беспроводной среде, при этом EIFS задается равным динамическому значению на основе состояния циклического избыточного кода (CRC) поля SIGNAL-A (SIG-A) принимаемого кадра.
[8] Нижеприведенное может применяться к одному или более из вышеуказанных аспектов настоящего изобретения.
[9] Динамическое значение EIFS может означать то, что значение EIFS является изменяемым согласно CRC-состоянию поля SIG-A.
[10] Поле SIG-A может переносить информацию, требуемую для того, чтобы интерпретировать принимаемый кадр.
[11] EIFS может задаваться равным значению, меньшему суммы aSIFSTime, межкадрового интервала функции распределенной координации (DIFS) и ACKTxTime, если кадр не имеет CRC-сбоя при приеме поля SIG-A принимаемого кадра, при этом aSIFSTime является номинальным значением короткого межкадрового интервала (SIFS), и при этом ACKTxTime является временем, требуемым для того, чтобы передавать ACK-кадр.
[12] EIFS может задаваться значению, равному DIFS, если кадр не имеет CRC-сбоя при приеме поля SIG-A принимаемого кадра.
[13] Примитив PHY-RXEND.indication может не содержать значение FormatViolation, если кадр не имеет CRC-сбоя при приеме поля SIG-A принимаемого кадра.
[14] DIFS может получаться посредством уравнения DIFS=aSIFSTime+2 x aSlotTime, при этом aSIFSTime является номинальным значением короткого межкадрового интервала (SIFS), и при этом aSlotTime является номинальной длительностью временного слота.
[15] EIFS может получаться посредством уравнения EIFS=aSIFSTime+DIFS+ACKTxTime, если кадр имеет CRC-сбой при приеме поля SIG-A принимаемого кадра, при этом aSIFSTime является номинальным значением короткого межкадрового интервала (SIFS), и при этом ACKTxTime является временем, требуемым для того, чтобы передавать ACK-кадр.
[16] Примитив PHY-RXEND.indication может содержать значение FormatViolation, если кадр имеет CRC-сбой при приеме поля SIG-A принимаемого кадра.
[17] Поле SIG-A может включать в себя поле индикатора ответного кадра.
[18] Поле индикатора ответного кадра может указывать одно из отсутствия ответа, ответа с пакетом без данных (NDP), нормального ответа или длинного ответа.
[19] STA может начинать передачу в беспроводной среде, если беспроводная среда определяется как бездействующая в течение временного интервала, указываемого посредством EIFS.
[20] STA может выполнять процедуру задержки после ожидания в течение временного интервала, указываемого посредством EIFS, если беспроводная среда определяется как занятая.
[21] STA может работать в нелицензированной полосе частот до 1 ГГц.
[22] EIFS может задаваться на основе CRC-состояния поля SIG-A принимаемого кадра, независимо от CRC-состояния поля SIG-B принимаемого кадра.
[23] Следует понимать, что вышеприведенное общее описание и нижеприведенное подробное описание настоящего изобретения являются примерными и пояснительными и имеют намерение предоставлять дополнительное пояснение изобретения согласно формуле изобретения.
Преимущества изобретения
[24] Как очевидно из вышеприведенного описания, примерные варианты осуществления настоящего изобретения могут предоставлять способ и устройство для регулирования и управления расширенным межкадровым интервалом (EIFS) в системе на основе беспроводной LAN (WLAN), чтобы поддерживать защиту ответных кадров и поддерживать эффективность доступа к каналу.
[25] Специалисты в данной области техники должны принимать во внимание, что преимущества, которые могут достигаться с помощью настоящего изобретения, не ограничены тем, что конкретно описано выше, и другие преимущества настоящего изобретения должны более ясно пониматься из нижеприведенного подробного описания, рассматриваемого в сочетании с прилагаемыми чертежами.
Краткое описание чертежей
[26] Прилагаемые чертежи, которые включены для того, чтобы обеспечивать дополнительное понимание изобретения, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для того, чтобы пояснять принципы настоящего изобретения.
[27] Фиг. 1 примерно показывает систему IEEE 802.11 согласно одному варианту осуществления настоящего изобретения.
[28] Фиг. 2 примерно показывает систему IEEE 802.11 согласно другому варианту осуществления, настоящего изобретения.
[29] Фиг. 3 примерно показывает систему IEEE 802.11 согласно еще одному другому варианту осуществления настоящего изобретения.
[30] Фиг. 4 является концептуальной схемой, иллюстрирующей WLAN-систему.
[31] Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей процесс установления линии связи для использования в WLAN-системе.
[32] Фиг. 6 является концептуальной схемой, иллюстрирующей процесс задержки.
[33] Фиг. 7 является концептуальной схемой, иллюстрирующей маскированный узел и демаскированный узел.
[34] Фиг. 8 является концептуальной схемой, иллюстрирующей RTS (готовность к передаче) и CTS (готовность к приему).
[35] Фиг. 9 является концептуальной схемой, иллюстрирующей структуру кадра для использования в системе IEEE 802.11.
[36] Фиг. 10 примерно показывает взаимосвязи DCF-синхронизаций.
[37] Фиг. 11 является концептуальной схемой, иллюстрирующей структуру кадра для NDP-кадров.
[38] Фиг. 12 является концептуальной схемой, иллюстрирующей структуру кадра для SU/MU-кадра.
[39] Фиг. 13 показывает пример использования поля индикатора ответного кадра поля SIG PLCP-заголовка принимаемого кадра.
[40] Фиг. 14 является блок-схемой последовательности операций способа, иллюстрирующей способ для доступа к каналу согласно настоящему изобретению.
[41] Фиг. 15 является блок-схемой, иллюстрирующей беспроводное устройство согласно настоящему изобретению.
Оптимальный режим осуществления изобретения
[42] Далее приводится подробное описание предпочтительных вариантов осуществления настоящего изобретения, примеры которых проиллюстрированы на прилагаемых чертежах. Подробное описание, которое приведено ниже со ссылкой на прилагаемые чертежи, имеет намерение пояснять примерные варианты осуществления настоящего изобретения вместо того, чтобы показывать только варианты осуществления, которые могут быть реализованы согласно настоящему изобретению. Нижеприведенное подробное описание включает в себя конкретные подробности для того, чтобы предоставлять полное понимание настоящего изобретения. Тем не менее, специалистам в данной области техники должно быть очевидным, что настоящее изобретение может быть использовано на практике без этих конкретных подробностей.
[43] Следующие варианты осуществления предлагаются посредством комбинирования составляющих компонентов и характеристик настоящего изобретения согласно предварительно определенному формату. Отдельные составляющие компоненты или характеристики должны считаться необязательными факторами при условии, что нет дополнительных указаний. При необходимости отдельные составляющие компоненты или характеристики могут не комбинироваться с другими компонентами или характеристиками. Помимо этого, некоторые составляющие компоненты и/или характеристики могут комбинироваться, с тем чтобы реализовывать варианты осуществления настоящего изобретения. Порядок операций, которые раскрываются в вариантах осуществления настоящего изобретения, может быть изменен. Некоторые компоненты или характеристики любого варианта осуществления при необходимости также могут быть включены в другие варианты осуществления либо могут быть заменены компонентами или характеристиками других вариантов осуществления.
[44] Следует отметить, что конкретные термины, раскрытые в настоящем изобретении, предлагаются для удобства описания и лучшего понимания настоящего изобретения, и использование этих конкретных терминов может быть изменено для других форматов в объеме или сущности настоящего изобретения.
[45] В некоторых случаях, известные структуры и устройства опускаются во избежание затруднения понимания принципов настоящего изобретения, и важные функции структур и устройств показаны в форме блок-схемы. Идентичные номера ссылок используются на всех чертежах для того, чтобы ссылаться на идентичные или аналогичные части.
[46] Примерные варианты осуществления настоящего изобретения поддерживаются посредством стандартных документов, раскрытых, по меньшей мере, для одной из систем беспроводного доступа, включающих в себя систему по стандарту 802 Института инженеров по электротехнике и радиоэлектронике (IEEE), систему по стандарту Партнерского проекта третьего поколения (3GPP), систему по стандарту долгосрочного развития 3GPP (LTE), систему по усовершенствованному стандарту LTE (LTE-A) и 3GPP2-систему. В частности, этапы или части, которые не описываются, чтобы понятно раскрывать техническую идею настоящего изобретения, в вариантах осуществления настоящего изобретения могут поддерживаться посредством вышеуказанных документов. Вся терминология, используемая в данном документе, может поддерживаться посредством, по меньшей мере, одного из вышеуказанных документов.
[47] Следующие варианты осуществления настоящего изобретения могут применяться ко множеству технологий беспроводного доступа, например, CDMA (множественного доступа с кодовым разделением каналов), FDMA (множественного доступа с частотным разделением каналов), TDMA (множественного доступа с временным разделением каналов), OFDMA (множественного доступа с ортогональным частотным разделением каналов), SC-FDMA (множественного доступа с частотным разделением каналов с одной несущей) и т.п. CDMA может быть осуществлен через технологию беспроводной (или радио-) связи, такую как UTRA (универсальный наземный радиодоступ) или CDMA2000. TDMA может быть осуществлен через технологию беспроводной (или радио-) связи, такую как GSM (глобальная система мобильной связи)/GPRS (общая служба пакетной радиопередачи)/EDGE (развитие стандарта GSM с увеличенной скоростью передачи данных). OFDMA может быть осуществлен через технологию беспроводной (или радио-) связи, такую как стандарт Института инженеров по электротехнике и радиоэлектронике (IEEE) 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802-20 и E-UTRA (усовершенствованный UTRA). Для понятности, нижеприведенное описание фокусируется на системах IEEE 802.11. Тем не менее, технические признаки настоящего изобретения не ограничены этим.
[48] Структура WLAN-системы
[49] Фиг. 1 примерно показывает систему IEEE 802.11 согласно одному варианту осуществления настоящего изобретения.
[50] Структура IEEE 802.11-системы может включать в себя множество компонентов. WLAN, которая поддерживает прозрачную STA-мобильность для верхнего уровня, может предоставляться посредством взаимных операций компонентов. Базовый набор служб (BSS) может соответствовать базовому составляющему блоку в LAN IEEE 802.11. На фиг. 1, показаны два BSS (BSS1 и BSS2), и две STA включаются в каждый из BSS (т.е. STA1 и STA2 включаются в BSS1, а STA3 и STA4 включаются в BSS2). Эллипс, указывающий BSS на фиг. 1, может пониматься как зона покрытия, в которой поддерживают связь STA, включенные в соответствующий BSS. Эта область может называться "базовой зоной обслуживания (BSA)". Если STA перемещается за пределы BSA, STA не может непосредственно обмениваться данными с другими STA в соответствующей BSA.
[51] В IEEE 802.11 LAN, самый базовый тип BSS представляет собой независимый BSS (IBSS). Например, IBSS может иметь минимальную форму, состоящую только из двух STA. BSS (BSS1 или BSS2) по фиг. 1, который представляет собой простейшую форму и в котором опускаются другие компоненты, может соответствовать типичному примеру IBSS. Такая конфигурация является возможной, когда STA могут непосредственно обмениваться данными между собой. Такой тип LAN не диспетчеризуется заранее и может быть сконфигурирован, когда LAN необходима. Она может называться "самоорганизующейся сетью".
[52] Членства STA в BSS могут быть динамически изменены, когда STA включается или выключается, либо STA входит или выходит из BSS-области. STA может использовать процесс синхронизации для того, чтобы присоединяться к BSS. Чтобы осуществлять доступ ко всем службам BSS-инфраструктуры, STA должна быть ассоциирована с BSS. Такое ассоциирование может быть динамически сконфигурировано и может включать в себя использование службы системы распространения (DSS).
[53] Фиг. 2 является схемой, показывающей другую примерную структуру IEEE 802.11-системы, к которой применимо настоящее изобретение. На фиг. 2, такие компоненты, как система распространения (DS), среда системы распространения (DSM) и точка доступа (AP), добавляются в структуру по фиг. 1.
[54] Прямое расстояние между STA в LAN может ограничиваться посредством PHY-производительности. В некоторых случаях, такое ограничение расстояния может быть достаточным для связи. Тем не менее, в других случаях, может требоваться связь между STA на большое расстояние. DS может быть выполнена с возможностью поддерживать расширенное покрытие.
[55] DS означает структуру, в которой BSS соединяются между собой. В частности, BSS может быть сконфигурирован как компонент расширенной формы для сети, состоящей из множества BSS, вместо независимой конфигурации, как показано на фиг. 1.
[56] DS является логическим понятием и может указываться посредством характеристики DSM. Относительно этого, беспроводная среда (WM) и DSM логически отличаются в IEEE 802.11. Соответствующие логические среды используются в различных целях и используются посредством различных компонентов. В определении IEEE 802.11, такие среды не ограничиваются идентичными или различными средами. Гибкость IEEE 802.11 LAN-архитектуры (DS-архитектуры или других сетевых архитектур) может поясняться в отношении того, что множество сред логически отличаются. Иными словами, IEEE 802.11 LAN-архитектура может по-разному реализовываться и может независимо указываться посредством физической характеристики каждой реализации.
[57] DS может поддерживать мобильные устройства посредством предоставления прозрачной интеграции нескольких BSS и предоставления логических служб, необходимых для обработки адреса назначения.
[58] AP означает объект, который предоставляет возможность ассоциированным STA осуществлять доступ к DS через WM и который имеет STA-функциональность. Данные могут перемещаться между BSS и DS через AP. Например, STA2 и STA3, показанные на фиг. 2, имеют STA-функциональность и предоставляют функцию инструктирования ассоциированным STA (STA1 и STA4) осуществлять доступ к DS. Кроме того, поскольку все AP, по сути, соответствуют STA, все AP являются адресуемыми объектами. Адрес, используемый посредством AP для связи по WM, не всегда должен быть идентичным адресу, используемому посредством AP для связи по DSM.
[59] Данные, передаваемые из одной из STA, ассоциированных с AP, на STA-адрес AP, могут всегда приниматься посредством неуправляемого порта и могут обрабатываться посредством объекта доступа к порту IEEE 802.1X. Если управляемый порт аутентифицируется, передаваемые данные (или кадр) могут быть переданы в DS.
[60] Фиг. 3 является схемой, показывающей еще одну другую примерную структуру IEEE 802.11-системы, к которой применимо настоящее изобретение. В дополнение к структуре по фиг. 2, фиг. 3 концептуально показывает расширенный набор служб (ESS) для предоставления широкого покрытия.
[61] Беспроводная сеть, имеющая произвольный размер и сложность, может состоять из DS и BSS. В IEEE 802.11-системе, такой тип сети называется "ESS-сетью". ESS может соответствовать набору BSS, подключенных к одной DS. Тем не менее, ESS не включает в себя DS. ESS-сеть отличается тем, что ESS-сеть выглядит как IBSS-сеть на уровне управления логической связью (LLC). STA, включенные в ESS, могут обмениваться данными между собой, и мобильные STA могут прозрачно перемещаться в LLC из одного BSS в другой BSS (в идентичном ESS).
[62] В IEEE 802.11, относительные физические местоположения BSS на фиг. 3 не предполагаются, и возможны все следующие формы. BSS могут частично перекрываться, и эта форма, в общем, используется для того, чтобы предоставлять непрерывное покрытие. BSS могут не соединяться физически, и логические расстояния между BSS не имеют предела. BSS могут быть расположены в идентичной физической позиции, и эта форма может быть использована для того, чтобы предоставлять избыточность. Одна или более IBSS- или ESS-сетей могут физически находиться в пространстве, идентичном с пространством одной или более ESS-сетей. Это может соответствовать форме ESS-сети в случае, если самоорганизующаяся сеть работает в местоположении, в котором присутствует ESS-сеть, в случае если сети по стандарту IEEE 802.11 различных организаций физически перекрываются, или в случае, если две или более различных политик доступа и безопасности требуются в идентичном местоположении.
[63] Фиг. 4 является схемой, показывающей примерную структуру WLAN-системы. На фиг. 4, показан пример инфраструктурного BSS, включающего в себя DS.
[64] В примере по фиг. 4, BSS1 и BSS2 составляют ESS. В WLAN-системе, STA представляет собой устройство, работающее согласно нормативным требованиям по MAC/PHY IEEE 802.11. STA включают в себя AP STA и не-AP STA. Не-AP STA соответствуют таким устройствам, как переносные компьютеры или мобильные телефоны, носимые непосредственно пользователями. На фиг. 4, STA1, STA3 и STA4 соответствуют не-AP STA, и STA2 и STA5 соответствуют AP STA.
[65] В нижеприведенном описании, не-AP STA может называться терминалом, беспроводным приемо-передающим модулем (WTRU), абонентским устройством (UE), мобильной станцией (MS), мобильным терминалом или мобильной абонентской станцией (MSS). AP является понятием, соответствующим базовой станции (BS), узлу B, усовершенствованному узлу B (e-NB), приемо-передающей подсистеме базовой станции (BTS) или фемто-BS в других областях техники беспроводной связи.
[66] Процесс установления линии связи
[67] Фиг. 5 является блок-схемой последовательности операций способа, поясняющей общий процесс установления линии связи согласно примерному варианту осуществления настоящего изобретения.
[68] Чтобы давать возможность STA устанавливать установление линии связи в сети, а также передавать/принимать данные по сети, STA должна выполнять установление этой линии связи через процессы обнаружения, аутентификации и ассоциирования сети и должна устанавливать ассоциирование и выполнять аутентификацию для обеспечения безопасности. Процесс установления линии связи также может называться "процессом инициирования сеанса" или "процессом установления сеанса". Помимо этого, этап ассоциирования является общим термином для этапов обнаружения, аутентификации, ассоциирования и установления безопасности в процессе установления линии связи.
[69] Процесс установления линии связи описывается со ссылкой на фиг. 5.
[70] На этапе S510, STA может выполнять этап обнаружения сети. Этап обнаружения сети может включать в себя этап STA-сканирования. Иными словами, STA должна выполнять поиск доступной сети, с тем чтобы осуществлять доступ к сети. STA должна идентифицировать совместимую сеть до участия в беспроводной сети. Здесь, процесс для идентификации сети, содержащейся в конкретной области, называется "процессом сканирования".
[71] Схема сканирования классифицируется на активное сканирование и пассивное сканирование.
[72] Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей этап обнаружения сети, включающий в себя процесс активного сканирования. В случае активного сканирования STA, выполненная с возможностью осуществлять сканирование, передает кадр тестового запроса и ожидает ответа на кадр тестового запроса, так что STA может перемещаться между каналами и одновременно может определять то, какая AP (точка доступа) присутствует в периферийной области. Ответчик передает кадр тестового ответа, выступающий в качестве ответа на кадр тестового запроса, в STA, передающую кадр тестового запроса. В этом случае, ответчик может представлять собой STA, которая в завершение передает кадр маякового радиосигнала в BSS сканированного канала. В BSS, поскольку AP передает кадр маякового радиосигнала, AP работает в качестве ответчика. В IBSS, поскольку STA IBSS последовательно передают кадр маякового радиосигнала, ответчик не является постоянным. Например, STA, которая передает кадр тестового запроса на канале #1 и принимает кадр тестового ответа на канале #1, сохраняет ассоциированную с BSS информацию, содержащуюся в принимаемом кадре тестового ответа, и перемещается (или коммутируется) на следующий канал (например, канал #2), так что STA может выполнять сканирование с использованием идентичного способа (т.е. передачи/приема тестового запроса/ответа на канале #2).
[73] Хотя не показано на фиг. 5, этап сканирования также может быть выполнен с использованием пассивного сканирования. STA, выполненная с возможностью осуществлять сканирование в режиме пассивного сканирования, ожидает кадра маякового радиосигнала при одновременном перемещении из одного канала на другой канал. Кадр маякового радиосигнала представляет собой один из управляющих кадров в IEEE 802.11, указывает присутствие беспроводной сети, предоставляет возможность STA, выполняющей сканирование, выполнять поиск беспроводной сети, и периодически передается таким образом, что STA может участвовать в беспроводной сети. В BSS, AP выполнена с возможностью периодически передавать кадр маякового радиосигнала. В IBSS, STA IBSS выполнены с возможностью последовательно передавать кадр маякового радиосигнала. Если каждая STA для сканирования принимает кадр маякового радиосигнала, STA сохраняет информацию BSS, содержащуюся в кадре маякового радиосигнала, и перемещается (коммутируется) на другой канал и записывает информацию кадров маякового радиосигнала в каждом канале. STA, принимающая кадр маякового радиосигнала, сохраняет ассоциированную с BSS информацию, содержащуюся в принимаемом кадре маякового радиосигнала, перемещается (или коммутируется) на следующий канал и в силу этого выполняет сканирование с использованием идентичного способа.
[74] При сравнении между активным сканированием и пассивным сканированием, активное сканирование является более преимущественным по сравнению с пассивным сканированием с точки зрения запаздывания и потребления мощности.
[75] После того, как STA обнаруживает сеть, STA может выполнять процесс аутентификации на этапе S520. Процесс аутентификации может называться "первым процессом аутентификации" таким образом, что процесс аутентификации может четко отличаться от процесса установления безопасности этапа S540.
[76] Процесс аутентификации может включать в себя передачу кадра запроса на аутентификацию в AP посредством STA и передачу кадра ответа по аутентификации в STA посредством AP в ответ на кадр запроса на аутентификацию. Аутентификационный кадр, используемый для запроса/ответа по аутентификации, может соответствовать управляющему кадру.
[77] Аутентификационный кадр может включать в себя номер алгоритма аутентификации, порядковый номер транзакции аутентификации, код состояния, текст оклика, помехоустойчивую защитную сеть (RSN), конечную циклическую группу (FCG) и т.д. Вышеуказанная информация, содержащаяся в аутентификационном кадре, может соответствовать некоторым частям информации, допускающей содержание в кадре запроса/ответа по аутентификации, может быть заменена другой информацией или может включать в себя дополнительную информацию.
[78] STA может передавать кадр запроса на аутентификацию в AP. AP может определять то, следует или нет аутентифицировать соответствующую STA, на основе информации, содержащейся в принимаемом кадре запроса на аутентификацию. AP может предоставлять результат аутентификации в STA через кадр ответа по аутентификации.
[79] После того, как STA успешно аутентифицирована, процесс ассоциирования может быть выполнен на этапе S530. Процесс ассоциирования может заключать в себе передачу кадра запроса на ассоциирование в AP посредством STA и передачу кадра ответа по ассоциированию в STA посредством AP в ответ на кадр запроса на ассоциирование.
[80] Например, кадр запроса на ассоциирование может включать в себя информацию, ассоциированную с различными характеристиками, интервал прослушивания маяковых радиосигналов, идентификатор набора служб (SSID), поддерживаемые скорости, поддерживаемые каналы, RSN, область мобильности, поддерживаемые функциональные классы, запрос на широковещательную передачу TIM (карты индикаторов трафика), поддержку услуг для межсетевого взаимодействия и т.д.
[81] Например, кадр ответа по ассоциированию может включать в себя информацию, ассоциированную с различными характеристиками, код состояния, идентификатор ассоциирования (AID), поддерживаемые скорости, набор параметров усовершенствованного распределенного доступа к каналу (EDCA), индикатор мощности приема канала (RCPI), индикатор отношения "мощность-принимаемого-сигнала-к-шуму" (RSNI), область мобильности, интервал тайм-аута (время возвращения ассоциирования), перекрывающийся параметр BSS-сканирования, широковещательный TIM-ответ, карту QoS (качества обслуживания) и т.д.
[82] Вышеуказанная информация может соответствовать некоторым частям информации, допускающей содержание в кадре запроса/ответа по на ассоциированию, может быть заменена другой информацией или может включать в себя дополнительную информацию.
[83] После того, как STA успешно ассоциирована с сетью, процесс установления безопасности может быть выполнен на этапе S540. Процесс установления безопасности этапа S540 может называться "процессом аутентификации на основе запроса/ответа по ассоциированию с помехоустойчивой защитной сетью (RSNA)". Процесс аутентификации этапа S520 может называться "первым процессом аутентификации", а процесс установления безопасности этапа S540 также может называться просто "процессом аутентификации".
[84] Например, процесс установления безопасности этапа S540 может включать в себя процесс установления закрытого ключа через четырехстороннее квитирование на основе кадра на основе расширяемого протокола аутентификации по LAN (EAPOL). Помимо этого, процесс установления безопасности также может быть выполнен согласно другим схемам обеспечения безопасности, не заданным в стандартах IEEE 802.11.
[85] Развитие WLAN
[86] WLAN-стандарт разрабатывается в качестве стандарта IEEE 802.11. IEEE 802.11a и IEEE 802.11b используют нелицензированный диапазон в 2,4 ГГц или 5 ГГц. IEEE 802.11b может предоставлять скорость передачи в 11 Мбит/с, а IEEE 802.11a может предоставлять скорость передачи в 54 Мбит/с. IEEE 802.11g может использовать мультиплексирование с ортогональным частотным разделением каналов (OFDM) при 2,4 ГГц и предоставлять скорость передачи в 54 Мбит/с. IEEE 802.11n может использовать OFDM со многими входами и многими выходами (MIMO) и предоставлять скорость передачи в 300 Мбит/с для четырех пространственных потоков. IEEE 802.11n может поддерживать максимум 40 МГц для полосы пропускания канала и поддерживать стандарт высокой пропускной способности (HT) максимум в 540 Мбит/с.
[87] Чтобы исключать ограничения по скорости WLAN-связи, IEEE 802.11n недавно установлен в качестве стандарта связи. IEEE 802.11n стремится повышать скорость и надежность работы сети, а также расширять зону покрытия беспроводной сети. Подробнее, IEEE 802.11n поддерживает стандарт высокой пропускной способности (HT) максимум в 540 Мбит/с и основан на MIMO-технологии, в которой несколько антенн устанавливаются на каждом из передающего устройства и приемного устройства.
[88] Чтобы предоставлять пропускную способность 1 Гбит/с или выше для MAC SAP, VHT-система IEEE 802.11 запрашивает полосу пропускания канала в 80 МГц или выше и, по меньшей мере, 8 пространственных потоков. Чтобы назначать, по меньшей мере, 1 Гбит/с для агрегированной пропускной способности VHT BSS, несколько VHT не-AP STA должны одновременно использовать канал. Чтобы разрешать нескольким VHT не-AP STA одновременно использовать канал, VHT AP STA может использовать либо множественный доступ с пространственным разделением каналов (SDMA), либо MU-MIMO. Другими словами, одновременная передача/прием может осуществляться между VHT AP STA и несколькими VHT не-AP STA.
[89] В дополнение к традиционной полосе частот на 2,4 ГГц или полосе частот на 5 ГГц, в настоящее время разрабатывается стандарт IEEE 802.11af для задания работы нелицензированного устройства в полосе частот TV Whitespace (TVWS), к примеру, в полосе частот для состояния бездействия (например, в полосе частот на 54-698 МГц), вызываемой посредством оцифровки аналоговых телевизоров. Полоса TVWS-частот, которая представляет собой полосу частот, выделяемую широковещательному телевидению, включает в себя полосу ультравысоких частот (UHF) и полосу сверхвысоких частот (VHF). В частности, полоса TVWS-частот представляет собой полосу частот, которая разрешена для использования посредством нелицензированного устройства при условии, что она не затрудняет связь лицензированного устройства, которое работает в полосе частот. Лицензированное устройство может включать в себя телевизор или беспроводной микрофон. Лицензированное устройство может упоминаться в качестве доминирующего пользователя или первичного пользователя. Чтобы преодолевать проблему совместного использования между нелицензированными устройствами, протокол передачи служебной информации, такой как общий кадр маякового радиосигнала, механизм считывания частоты и т.п., может требоваться для нелицензированных устройств.
[90] Операции всех нелицензированных устройств разрешаются в полосе частот 512-608 МГц и полосе частот 614-698 МГц. Тем не менее, только связь между стационарными устройствами разрешается в полосах частот 54-60 МГц, 76-88 МГц, 174-216 МГц и 470-512 МГц. Термин "стационарное устройство" означает устройство, которое выполняет передачу сигналов только в стационарном местоположении. IEEE 802.11 TVWS-терминал представляет собой нелицензированное устройство, которое работает, в TVWS-спектре, с использованием уровня управления доступом к среде (MAC) IEEE 802.11 и физического уровня (PHY).
[91] Нелицензированное устройство, которое хочет использовать полосу TVWS-частот, должно предоставлять функцию для того, чтобы защищать лицензированные устройства. Соответственно, нелицензированное устройство должно проверять то, занимает или нет лицензированное устройство полосу частот, до того, как нелицензированное устройство начинает передачу сигналов. Для этого нелицензированное устройство может проверять то, используется или нет полоса частот посредством лицензированного устройства, посредством выполнения считывания спектра. Примеры механизма считывания спектра включают в себя схему обнаружения энергии и схему обнаружения признаков. Нелицензированное устройство может определять то, что лицензированное устройство использует конкретную полосу частот, когда интенсивность принимаемого сигнала превышает конкретный уровень, либо когда обнаруживается DTV-преамбула. После определения того, что лицензированное устройство работает в канале, который является непосредственно смежным с каналом, в настоящий момент используемым посредством нелицензированного устройства, нелицензированное устройство должно уменьшать мощность передачи.
[92] Технология M2M (межмашинной) связи обсуждается в качестве технологии связи следующего поколения. Технический стандарт для поддержки M2M-связи разработан в качестве IEEE 802.11ah в IEEE 802.11 WLAN-системе. M2M-связь означает схему связи, включающую в себя одну или более машин, или также может называться "машинной связью (MTC)" или "межмашинной (M2M) связью". В этом случае, машина может представлять собой объект, который не требует прямой обработки и вмешательства пользователя. Например, не только счетчик или торговый автомат, включающий в себя RF-модуль, но также и абонентское устройство (UE) (к примеру, смартфон), допускающее осуществление связи посредством автоматического осуществления доступа к сети без вмешательства/обработки пользователя, может представлять собой пример таких машин. M2M-связь может включать в себя связь между устройствами (D2D) и связь между устройством и сервером приложений и т.д. В качестве примерной связи между устройством и сервером приложений, приводится связь между торговым автоматом и сервером приложений, связь между кассовым (POS) терминалом и сервером приложений и связь между электрическим счетчиком, газовым счетчиком или счетчиком воды и сервером приложений. Варианты применения связи на основе M2M могут включать в себя безопасность, транспортные перевозки, здравоохранение и т.д. В случае рассмотрения вышеуказанных примеров вариантов применения, M2M-связь должна поддерживать способ для периодической передачи/приема небольшого объема данных на низкой скорости в окружении, включающем в себя большое число устройств.
[93] Подробнее, M2M-связь должна поддерживать большое число STA. Хотя текущая WLAN-система допускает то, что одна AP ассоциирована максимум с 2007 STA, различные способы для поддержки других случаев, в которых гораздо большее число STA (например, приблизительно 6000 STA) ассоциированы с одной AP, в последнее время обсуждаются касательно M2M-связи. Помимо этого, предполагается, что множество вариантов применения для поддержки/запроса низкой скорости передачи присутствуют в M2M-связи. Чтобы безотказно поддерживать множество STA, WLAN-система может распознавать присутствие или отсутствие данных, которые должны быть переданы в STA, на основе TIM (карты индикаторов трафика), и в последнее время обсуждаются различные способы для уменьшения размера битовой карты TIM. Помимо этого, предполагается, что значительный объем данных трафика, имеющих очень большой интервал передачи/приема, присутствует в M2M-связи. Например, в M2M-связи, очень небольшой объем данных (например, измерение расхода электричества/газа/воды) должен быть передан с длительными интервалами (например, каждый месяц). Помимо этого, STA работает согласно команде, принимаемой через нисходящую линию связи (т.е. линию связи из AP в не-AP STA) в M2M-связи, так что данные сообщаются через восходящую линию связи (т.е. линию связи из не-AP STA в AP). M2M-связь в основном ориентирована на схему связи, улучшенную на восходящей линии связи для передачи основных данных. Помимо этого, M2M STA работает главным образом от аккумулятора, и пользователь может испытывать затруднение при частом заряде M2M STA электричеством, так что расход питания аккумулятора минимизируется, что приводит к увеличенному времени работы от аккумулятора. Помимо этого, пользователь может испытывать затруднение при прямой обработке M2M STA в конкретной ситуации, так что требуется функция самовосстановления. Следовательно, хотя число STA, ассоциированных с одной AP, увеличивается в WLAN-системе, многие разработчики и компании проводят интенсивные исследования относительно WLAN-системы, которая может эффективно поддерживать случай, в котором имеется очень небольшое число STA, каждая из которых имеет кадр данных, который должен быть принят из AP в течение одного периода маякового радиосигнала, и одновременно может сокращать потребление мощности STA.
[94] Как описано выше, WLAN-технология быстро развивается, и интенсивно разрабатываются не только вышеуказанные примерные технологии, но также и другие технологии, такие как установление прямой линии связи, повышение пропускной способности потоковой передачи мультимедиа, высокая скорость и/или поддержка крупномасштабного начального установления сеанса и поддержка расширенной полосы пропускания и рабочей частоты.
[95] Механизм доступа к среде
[96] В WLAN-системе на основе IEEE 802.11, базовый механизм доступа MAC (управления доступом к среде) представляет собой механизм множественного доступа со считыванием несущей и с предотвращением коллизий (CSMA/CA). CSMA/CA-механизм называется "функцией распределенной координации (DCF)" MAC IEEE 802.11 и, по сути, включает в себя механизм доступа по принципу "слушай перед тем, как сказать". В соответствии с вышеуказанным механизмом доступа, AP и/или STA могут выполнять оценку состояния канала (CCA) для считывания беспроводного канала или среды в течение предварительно определенного временного интервала (например, межкадрового DCF-интервала (DIFS)), до передачи данных. Если определено то, что среда находится в состоянии бездействия, начинается передача кадров через соответствующую среду. Между тем, если определено то, что среда находится в занятом состоянии, соответствующая AP и/или STA не начинает собственную передачу, устанавливает время ожиданий (например, период случайной задержки) для доступа к среде и пытается начинать передачу кадров после ожидания в течение предварительно определенного времени. Через применение периода случайной задержки, предполагается, что несколько STA должны пытаться начинать передачу кадров после ожидания в течение различных периодов времени, что приводит к минимальной коллизии.
[97] Помимо этого, MAC-протокол IEEE 802.11 предоставляет функцию гибридной координации (HCF). HCF основана на DCF и функции координации точкой доступа (PCF). PCF означает схему синхронного доступа на основе опроса, в которой периодический опрос выполняется таким образом, что все приемные (Rx) AP и/или STA могут принимать кадр данных. Помимо этого, HCF включает в себя усовершенствованный распределенный доступ к каналу (EDCA) и доступ к каналу под управлением HCF (HCCA). EDCA достигается, когда схема доступа, предоставленная от поставщика множеству пользователей, является конкурентной. HCCA достигается посредством схемы неконкурентного доступа к каналу на основе механизма опроса. Помимо этого, HCF включает в себя механизм доступа к среде для повышения качества обслуживания (QoS) WLAN и может передавать данные по QoS как в конкурентный период (CP), так и в неконкурентный период (CFP).
[98] Фиг. 6 является концептуальной схемой, иллюстрирующей процесс задержки.
[99] Далее описываются операции на основе периода случайной задержки со ссылкой на фиг. 6. Если среда в занятом состоянии или в состоянии занятости переводится в состояние бездействия, несколько STA могут пытаться передавать данные (или кадр). В качестве способа для реализации минимального числа коллизий, каждая STA выбирает счетчик времени случайной задержки, ожидает в течение временного слота, соответствующего выбранному счетчику времени задержки, и затем пытается начинать передачу данных. Счетчик времени случайной задержки является псевдослучайным целым числом и может задаваться равным одному из 0 и CW-значений. В этом случае, CW означает значение параметра конкурентного окна. Хотя начальное значение CW-параметра обозначается посредством CWmin, начальное значение может быть удвоено в случае неудачной попытки передачи (например, в случае если ACK кадра передачи не принимается). Если значение CW-параметра обозначается посредством CWmax, CWmax поддерживается до тех пор, пока передача данных не завершится удачно, и одновременно можно пытаться начинать передачу данных. Если передача данных завершена удачно, значение CW-параметра сбрасывается до CWmin. Предпочтительно, CW, CWmin и CWmax задаются равными 2n-1 (где n=0, 1, 2,...,).
[100] Если начинает работать процесс случайной задержки, STA непрерывно отслеживает среду при обратном подсчете временного слота задержки в ответ на определенное значение счетчика времени задержки. Если среда отслеживается как находящаяся в занятом состоянии, прекращается обратный подсчет, и выполняется ожидание в течение предварительно определенного времени. Если среда находится в состоянии бездействия, перезапускается оставшийся обратный подсчет.
[101] Как показано в примере по фиг. 6, если пакет, который должен быть передан в MAC STA3, поступает в STA3, STA3 определяет то, находится или нет среда в состоянии бездействия в течение DIFS, и может непосредственно начинать передачу кадров. Между тем, оставшиеся STA отслеживают то, находится или нет среда в состоянии занятости, и ожидают в течение предварительно определенного времени. В течение предварительно определенного времени, данные, которые должны быть переданы, могут возникать в каждой из STA1, STA2 и STA5. Если среда находится в состоянии бездействия, каждая STA ожидает в течение DIFS-времени и затем выполняет обратный подсчет временного слота задержки в ответ на значение счетчика времени случайной задержки, выбранное посредством каждой STA. Пример по фиг. 6 показывает то, что STA2 выбирает наименьшее значение счетчика времени задержки, а STA1 выбирает наибольшее значение счетчика времени задержки. Иными словами, после того, как STA2 заканчивает подсчет времени задержки, остаточное время задержки STA5 во время начала передачи кадров меньше остаточного времени задержки STA1. Каждая из STA1 и STA5 временно прекращает обратный подсчет в то время, когда STA2 занимает среду, и ожидает в течение предварительно определенного времени. Если занятие STA2 заканчивается, и среда повторно переходит в состояние бездействия, каждая из STA1 и STA5 ожидает в течение предварительно определенного времени DIFS и перезапускает подсчет времени задержки. Иными словами, после того, как обратно подсчитывается оставшийся временной слот задержки в течение остаточного времени задержки, может начинать работу передача кадров. Поскольку остаточное время задержки STA5 меньше остаточного времени задержки STA1, STA5 начинает передачу кадров. Между тем, данные, которые должны быть переданы, могут возникать в STA4 в то время, когда STA2 занимает среду. В том случае, если среда находится в состоянии бездействия, STA4 ожидает в течение DIFS-времени, выполняет обратный подсчет в ответ на значение счетчика времени случайной задержки, выбранное посредством STA4, и затем начинает передачу кадров. Фиг. 6 примерно показывает случай, когда остаточное время задержки STA5 случайно является идентичным значению счетчика времени случайной задержки STA4. В этом случае, может возникать неожиданная коллизия между STA4 и STA5. Если коллизия возникает между STA4 и STA5, каждая из STA4 и STA5 не принимает ACK, что приводит к возникновению сбоя в передаче данных. В этом случае, каждая из STA4 и STA5 увеличивает CW-значение в два раза, и STA4 или STA5 может выбирать значение счетчика времени случайной задержки и затем выполнять обратный подсчет. Между тем, STA1 ожидает в течение предварительно определенного времени в то время, когда среда находится в занятом состоянии вследствие передачи STA4 и STA5. В этом случае, если среда находится в состоянии бездействия, STA1 ожидает в течение DIFS-времени и затем начинает передачу кадров после истечения остаточного времени задержки.
[102] Операция считывания STA
[103] Как описано выше, CSMA/CA-механизм включает в себя не только механизм физического считывания несущей, в котором AP и/или STA могут непосредственно считывать среду, но также и механизм виртуального считывания несущей. Механизм виртуального считывания несущей может разрешать некоторые проблемы (к примеру, проблему маскированных узлов), встречающиеся при доступе к среде. Для виртуального считывания несущей, MAC WLAN-системы может использовать вектор резервирования сети (NAV). Подробнее, посредством NAV-значения, AP и/или STA, каждая из которых в настоящий момент использует среду или имеет полномочие использовать среду, могут сообщать в другую AP и/или в другую STA относительно оставшегося времени, когда доступна среда. Соответственно, NAV-значение может соответствовать зарезервированному времени, когда среда должна использоваться посредством AP и/или STA, выполненной с возможностью передавать соответствующий кадр. STA, принимающая NAV-значение, может запрещать доступ к среде (или доступ к каналу) в течение соответствующего зарезервированного времени. Например, NAV может задаваться согласно значению поля "длительности" MAC-заголовка кадра.
[104] Предложен механизм надежного обнаружения коллизий для того, чтобы уменьшать вероятность такой коллизии, и, по сути, далее приводится его подробное описание со ссылкой на фиг. 7 и 8. Хотя фактический диапазон считывания несущей отличается от диапазона передачи, предполагается, что фактический диапазон считывания несущей является идентичным диапазону передачи для удобства описания и лучшего понимания настоящего изобретения.
[105] Фиг. 7 является концептуальной схемой, иллюстрирующей маскированный узел и демаскированный узел.
[106] Фиг. 7(a) примерно показывает маскированный узел. На фиг. 7(a), STA A обменивается данными с STA B, и STA C имеет информацию, которая должна быть передана. На фиг. 7(a), STA C может определять то, что среда находится в состоянии бездействия, при выполнении считывания несущей перед передачей данных в STA B при условии, что STA A передает информацию в STA B. Поскольку передача STA A (т.е. занятая среда) не может быть обнаружена в местоположении STA C, определяется то, что среда находится в состоянии бездействия. В этом случае, STA B одновременно принимает информацию STA A и информацию STA C, что приводит к возникновению коллизии. Здесь, STA A может считаться маскированным узлом STA C.
[107] Фиг. 7(b) примерно показывает демаскированный узел. На фиг. 7(b), при условии, что STA B передает данные в STA A, STA C имеет информацию, которая должна быть передана в STA D. Если STA C выполняет считывание несущей, определяется то, что среда занята вследствие передачи STA B. Следовательно, хотя STA C имеет информацию, которая должна быть передана в STA D, считывается занятое состояние среды, так что STA C должна ожидать в течение предварительно определенного времени (т.е. в режиме ожидания) до тех пор, пока среда не будет находиться в состоянии бездействия. Тем не менее, поскольку STA A фактически находится за пределами диапазона передачи STA C, передача из STA C может не конфликтовать с передачей из STA B с точки зрения STA A, так что STA C избыточно переходит в режим ожидания до тех пор, пока STA B не прекратит передачу. Здесь, STA C называется "демаскированным узлом STA B".
[108] Фиг. 8 является концептуальной схемой, иллюстрирующей RTS (готовность к передаче) и CTS (готовность к приему).
[109] Чтобы эффективно использовать механизм предотвращения коллизий в вышеуказанной ситуации по фиг. 7, можно использовать короткий служебный пакет, такой как RTS (готовность к передаче) и CTS (готовность к приему). RTS/CTS между двумя STA может прослушиваться посредством периферийной STA, так что периферийная STA может рассматривать то, передается или нет информация между двумя STA. Например, если STA, которая должна быть использована для передачи данных, передает RTS-кадр в STA, принимающую данные, STA, принимающая данные, передает CTS-кадр в периферийные STA и может сообщать периферийным STA относительно того, что STA собирается принимать данные.
[110] Фиг. 8(a) примерно показывает способ для разрешения проблем маскированного узла. На фиг. 8(a), предполагается, что каждая из STA A и STA C готова передавать данные в STA B. Если STA A передает RTS в STA B, STA B передает CTS в каждую из STA A и STA C, расположенных около STA B. Как результат, STA C должна ожидать в течение предварительно определенного времени до тех пор, пока STA A и STA B не прекратят передачу данных, так что не допускается возникновение коллизии.
[111] Фиг. 8(b) примерно показывает способ для разрешения проблем демаскированного узла. STA C выполняет прослушивание RTS/CTS-передачи между STA A и STA B, так что STA C может не определять коллизию, хотя она передает данные в другую STA (например, STA D). Иными словами, STA B передает RTS во все периферийные STA, и только STA A, имеющая данные, которые должны быть фактически переданы, может передавать CTS. STA C принимает только RTS и не принимает CTS STA A, так что можно распознавать то, что STA A расположена за пределами диапазона считывания несущей STA C.
[112] Формат кадра
[113] Фиг. 9 является схемой для пояснения примерного формата кадра, используемого в системе IEEE 802.11.
[114] Формат кадра пакетной единицы данных на основе протокола конвергенции физического уровня (PLCP) (PPDU) может включать в себя короткое обучающее поле (STF), длинное обучающее поле (LTF), поле сигнала (SIG) и поле данных. Большая часть базового (например, не-HT) формата PPDU-кадра может состоять из унаследованного STF-поля (L-STF), унаследованного LTF-поля (L-LTF), поля SIG и поля данных. Помимо этого, самый базовый формат PPDU-кадра дополнительно может включать в себя дополнительные поля (т.е. поля STF, LTF и SIG) между полем SIG и полем данных согласно типам форматов PPDU-кадра (например, PPDU в HT-смешанном формате, PPDU в формате HT "с нуля", VHT PPDU и т.п.).
[115] STF представляет собой сигнал для обнаружения сигналов, автоматической регулировки усиления (AGC), выбора разнесения, точной временной синхронизации и т.д. LTF представляет собой сигнал для оценки канала, оценки ошибок по частоте и т.д. Сумма STF и LTF может называться "PCLP-преамбулой". PLCP-преамбула может упоминаться в качестве сигнала для синхронизации и оценки канала физического уровня с мультиплексированием с ортогональным частотным разделением каналов (OFDM).
[116] Поле SIG может включать в себя поле скорости, поле длины и т.д. Поле скорости может включать в себя информацию, связанную со скоростью модуляции и кодирования данных. Поле длины может включать в себя информацию, связанную с длиной данных. Кроме того, поле SIG может включать в себя поле четности, концевой SIG-бит и т.д.
[117] Поле данных может включать в себя служебное поле, служебную единицу данных PLCP (PSDU) и концевой PPDU-бит. При необходимости поле данных дополнительно может включать в себя дополняющий бит. Некоторые биты служебного поля могут быть использованы для того, чтобы синхронизировать модуль дескремблирования приемного устройства. PSDU может соответствовать MAC PDU (протокольной единице данных), заданной на MAC-уровне, и может включать в себя данные, сформированные/используемые на верхнем уровне. Концевой PPDU-бит может обеспечивать возможность кодеру возвращаться в состояние нуля (0). Дополняющий бит может быть использован для того, чтобы регулировать длину поля данных согласно предварительно определенной единице.
[118] MAC PDU может задаваться согласно различным форматам MAC-кадра, и базовый MAC-кадр состоит из MAC-заголовка, тела кадра и контрольной последовательности кадра. MAC-кадр состоит из MAC PDU, так что он может быть передан/принят через PSDU части данных формата PPDU-кадра.
[119] MAC-заголовок может включать в себя поле управления кадрами, поле длительности/идентификатора, поля адреса, поле управления последовательностями, поле QoS-управления, поле управления HT (в режиме высокой пропускной способности) и т.д. Поле управления кадрами может включать в себя управляющую информацию, необходимую для передачи/приема кадров. Поле длительности/идентификатора может устанавливаться в качестве конкретного времени для передачи соответствующего кадра и т.п. Четыре поля адреса (адрес 1, адрес 2, адрес 3, адрес 4) могут указывать идентификатор базового набора служб (BSSID), исходный адрес (SA), адрес назначения (DA), адрес передающего устройства (TA), адрес приемного устройства (RA) и т.д. Только некоторые части из четырех полей адреса могут быть включены согласно типам кадров. На предмет подробного описания управления последовательностями, поля QoS-управления и подполей HT-управления MAC-заголовка обратитесь к документам по стандарту IEEE 802.11-2012.
[120] Поле управления кадрами MAC-заголовка может включать в себя подполя версии протокола, типа, подтипа, в DS, из DS, дополнительных фрагментов, попыток повторной передачи, управления питанием, дополнительных данных, защищенного кадра и порядка. На предмет подробного описания отдельных подполей поля управления кадрами обратитесь к документам по стандарту IEEE 802.11-2012.
[121] Между тем, формат кадра пакета без данных (NDP) может указывать формат кадра, имеющий пакет данных. Иными словами, NDP-кадр включает в себя часть PLCP-заголовка (т.е. поля STF, LTF и SIG) общего формата PPDU, при том, что он не включает в себя оставшиеся части (т.е. поле данных). NDP-кадр может упоминаться в качестве формата короткого кадра.
[122] Поле управления кадрами формата короткого кадра может включать в себя подполя версии протокола, типа, PTID/подтипа, из DS, дополнительных фрагментов, управления питанием, дополнительных данных, защищенного кадра, периода прекращения предоставления услуг, ретранслированного кадра и политики ACK. Поле политики ACK может быть включено в поле QoS-управления кадров данных по QoS или в поле управления кадрами для коротких кадров. Поле политики ACK может указывать отсутствие ACK, нормальное ACK либо запрос неявного блочного ACK или блочное ACK.
[123] Межкадровый интервал (IFS)
[124] IFS представляет собой временной интервал между кадрами. STA может выполнять считывание несущей, чтобы определять то, является канал занятым или бездействующим в течение временного интервала, указываемого посредством IFS. Различные типы IFS задаются для того, чтобы предоставлять уровни приоритета для доступа к беспроводной среде.
[125] Некоторые примеры IFS представляют собой короткий IFS (SIFS), PCF IFS (PIFS), DCF IFS (DIFS), расширенный IFS (EIFS). SIFS используется до передачи CTS-кадра, ACK-кадров и т.д. PIFS используется для передачи PCF-кадров, и DIFS используется для передачи DCF-кадров. DCF использует EIFS перед передачей, когда она определяет то, что среда является бездействующей, после приема кадра, для которого индикатор из PHY содержит ошибку, или кадра, для которого значение MAC FCS (контрольной последовательности кадра) или значение MAC CRC (циклического избыточного кода) не является корректным.
[126] Различные IFS являются независимыми от скорости передачи STA-битов. IFS-синхронизации задаются как временные промежутки в среде, и IFS-синхронизации могут быть фиксированными для каждого PHY. IFS-значения определяются из атрибутов, указываемых посредством PHY.
[127] Фиг. 10 примерно показывает взаимосвязи DCF-синхронизаций. Все синхронизации указываются ссылкой из примитивов PHY-TXEND.confirm, PHY-TXSTART.confirm, PHY-RXSTART.indication и PHY-RXEND.indication.
[128] Ссылаясь на фиг. 10, номинальное SIFS-значение (aSIFSTime) и номинальная длительность временного слота (aSlotTime) определяется для каждого PHY, aSIFSTime может иметь фиксированное значение, и aSlotTime может варьироваться динамически согласно времени распространения (aAirPropagationTime). Уравнения 1 и 2 являются определениями aSlotTime и aSlotTime.
[129] уравнение 1
aSIFSTime=aRxRFDelay+aRxPLCPDelay+aMACProcessingDelay+aRxTxTurnaroundTime
[130] уравнение 2
aSlotTime=aCCATime+aRxTxTurnaroundTime+aAirPropagationTime+aMACProcessingDelay
[131] Параметр aRxRFDelay описывается как номинальное время (в микросекундах) между концом символа в радиоинтерфейсе до выдачи примитива PMD_DATA.indication в PLCP. Примитив PMD_DATA.indication задает передачу данных из зависимого от физической среды объекта (PMD-объекта) в PLCP-подуровень.
[132] Параметр aRxPLCPDelay описывается как номинальное время (в микросекундах), которое PLCP использует для того, чтобы доставлять последний бит принимаемого кадра из тракта приема PMD в MAC.
[133] Параметр aMACProcessingDelay описывается как максимальное время (в микросекундах), доступное для MAC, чтобы выдавать примитив PHY-TXSTART.request в соответствии с примитивом PHY-RXEND.indication (для ответа после SIFS) или примитивом PHY-CCA.indication(IDLE) (для ответа на любой границе временного слота после SIFS). Примитив PHY-TXSTART.request представляет собой запрос посредством MAC-подуровня в локальный PHY-объект, чтобы начинать передачу PSDU. Примитив PHY-CCA.indication представляет собой индикатор посредством PHY в локальный MAC-объект относительно текущего состояния среды, а также предоставляет наблюдаемые значения индикатора мощности в бездействующем режиме (IPI), когда передача IPI-сообщений включается.
[134] Параметр aRxTxTurnaroundTime описывается как максимальное время (в микросекундах), которое требуется для PHY, чтобы переключаться с приема на передачу начала первого символа.
[135] Параметр aCCATime описывается как максимальное время (в микросекундах), которое механизм CCA имеет доступным для того, чтобы оценивать среду в каждом временном слоте, чтобы определять то, является среда занятой или бездействующей.
[136] Уравнения 3 и 4 являются определениями PIFS и DIFS.
[137] уравнение 3
PIFS=aSIFSTime+aSlotTime
[138] уравнение 4
DIFS=aSIFSTime+2 x aSlotTime
[139] Уравнение 5 является определением EIFS.
[140] уравнение 5
EIFS=aSIFSTime+DIFS+ACKTxTime
[141] Параметр ACKTxTime описывается как время, выражаемое в микросекундах, требуемое для того, чтобы передавать ACK-кадр, включающий в себя преамбулу, заголовок PHY и любую дополнительную зависимую от PHY информацию, при наименьшей обязательной скорости в PHY.
[142] Фиг. 10 иллюстрирует взаимосвязь между SIFS, PIFS и DIFS, когда они измеряются в среде, и различные границы временных MAC-слотов TxSIFS, TxPIFS и TxDIFS. Эти границы временных слотов задают то, когда передающее устройство должно включаться посредством MAC, чтобы удовлетворять различным IFS-синхронизациям в среде после последующего обнаружения CCA-результата предыдущего временного слота.
[143] Уравнения 6, 7 и 8 задают границы временных MAC-слотов, с использованием атрибутов, предоставленных посредством PHY, которые являются такими, что они компенсируют изменения синхронизации реализации. Начальный ориентир этих границ временных слотов снова является концом последнего символа предыдущей PPDU.
[144] уравнение 6
TxSIFS=SIFS – aRxTxTurnaroundTime
[145] уравнение 7
TxPIFS=TxSIFS+aSlotTime
[146] уравнение 8
TxDIFS=TxSIFS+2 x aSlotTime
[147] Динамический расширенный межкадровый интервал (динамический EIFS)
[148] Настоящее изобретение предлагает эффективное регулирование/управление EIFS.
[149] Как показано в уравнении 5, ACKTxTime добавляется в вычислении EIFS, чтобы отражать то, что ACK-кадр передается в качестве ответного кадра на принимаемый кадр. Если STA не может определять тип кадра либо информацию длительности принимаемого (или прослушиваемого) кадра, поскольку принимаемый кадр имеет ошибку, STA предполагает то, что фактическая STA-получатель может передавать ответный кадр, и отсрочивать доступ к каналу для ACKTxTime, чтобы защищать ответный кадр, передаваемый посредством фактической STA-получателя.
[150] Традиционно, ACKTxTime вычисления EIFS определяется на основе предположения касательно наименьшей обязательной скорости в PHY, чтобы охватывать максимальное время ACK-передачи, поскольку STA не может прогнозировать длину ответного кадра, передаваемого посредством фактической STA-получателя. В связи с этим, ответный кадр, имеющий неизвестную длину, передаваемый посредством фактической STA-получателя, может быть полностью защищен посредством вычисления EIFS с учетом максимального времени ACK-передачи. Между тем, если фактическая STA-получатель передает ответный кадр короче максимального времени ACK-передачи, оставшееся время не используется посредством других STA. В этом случае, доступ к каналу других STA чрезмерно отсрочивается, и снижается эффективность использования канала.
[151] Настоящее изобретение предлагает схему на основе динамического EIFS, включающую в себя вычисление (либо конфигурирование или задание) EIFS посредством использования дополнительной информации из PPDU, имеющей ошибку, чтобы разрешать проблемы неэффективности доступа к каналу с защитой ответного кадра.
[152] Как описано выше, EIFS может использоваться в двух случаях: i) STA принимает PSDU, но сбой возникает в MAC CRC (циклическом избыточном коде) вследствие ошибки канала; ii) индикатор из PHY (например, примитив PHY-RXEND.indication) содержит ошибку.
[153] Случай ii) включает в себя случай, когда PLCP-заголовок имеет ошибку (например, нарушение формата), или случай, когда обнаруживается неподдерживаемая скорость передачи данных (например, неподдерживаемая скорость). Таблица 1 показывает параметры, возвращаемые для каждого из состояний ошибки.
[154]
[155] Схема на основе динамического EIFS для случая i) описывается следующим образом.
[156] PLCP-заголовок принимаемой PPDU содержит поле короткого защитного интервала (SGI) в поле SIG. Если поле SGI имеет значение 1 (т.е. принимаемая PPDU использует короткий GI), ответный кадр также использует короткий GI. Например, когда управляющий кадр, к примеру, ACK-кадр передается в качестве ответного кадра, если кадр данных использует параметр короткого GI, следующий ACK-кадр также использует параметр короткого GI. Соответственно, предлагается, что короткий GI используется при вычислении ACKTxTime для EIFS, если PPDU, принимаемая с ошибкой, имеет поле SGI, имеющее значение 1.
[157] Схема на основе динамического EIFS для случая ii) описывается следующим образом.
[158] Если ошибка принимаемой PPDU возникает в PLCP-заголовке, дополнительная информация для прогнозирования ACKTxTime для EIFS не может получаться. Между тем, если время передачи для кадра, имеющего конкретный тип кадра, является фиксированным, STA может определять тип кадра из времени передачи кадра и вычисления ACKTxTime на основе определенного типа кадра.
[159] Например, NDP-кадры (или NDP MAC-кадры) имеют различные времена передачи для различных типов NDP-кадров. Как описано выше, NDP-кадр имеет только поля STF, LTF и SIG, и PSDU, STF или LTF не передается после поля SIG. NDP-кадры могут использоваться для уменьшения объема протокольной служебной информации в WLAN-системе, работающей в нелицензированной полосе частот в 1 ГГц (например, Исследовательская группа IEEE 802.11ah (работа в освобожденной полосе частот до 1 ГГц (S1G)) с использованием полосы пропускания канала в 1/2/4/8/16 МГц). NDP MAC-кадры включают в себя управляющий кадр (например, CTS-кадр, ACK-кадр, блочный ACK-кадр,...,) с информацией, кодированной в поле SIG PLCP-заголовка без конфигурирования MPDU.
[160] Фиг. 11 является концептуальной схемой, иллюстрирующей структуру кадра для NDP-кадров.
[161] Фиг. 11(a) показывает пример формата NDP MAC-кадра, используемого для ширины канала, большей или равной 2 МГц (>= 2 МГц). Фиг. 11(b) показывает пример формата NDP MAC-кадра, используемого для ширины канала в 1 МГц. Следует отметить, что соответствующая длина полей STF, LTF и SIG равна 2, 2 и 2 OFDM-символам для формата NDP MAC-кадра для >= 2 МГц и 4, 4 и 6 OFDM-символам для формата NDP MAC-кадра для 1 МГц.
[162] Согласно схеме на основе динамического EIFS настоящего изобретения, если STA принимает PPDU с ошибкой в PLCP-заголовке, и время передачи (или число OFDM-символов) принимаемой PPDU соответствует 6 символам (фиг. 11(a)) или 14 символам (фиг. 11(b)), STA рассматривает принимаемую PPDU в качестве управляющего кадра и исключает ACKTxTime из EIFS, поскольку кадр отсутствия ответа передается в ответ на NDP MAC-кадр.
[163] Если STA считает то, что принимаемая PPDU с ошибкой представляет собой одно из NDP MAC-кадра (например, NDP CTS-кадр, NDP ACK-кадр, блочный NDP ACK-кадр,...,), то она вычисляет EIFS без учета ACKTxTime и aSIFSTime, приводя к EIFS=DIFS.
[164] Если STA считает то, что принимаемая PPDU с ошибкой не представляет собой ни один из NDP MAC-кадров (т.е. время передачи принимаемой PPDU не соответствует 6 символам или 14 символам), то она вычисляет EIFS с учетом ACKTxTime и aSIFSTime, приводя к EIFS=aSIFSTime+DIFS+ACKTxTime.
[165] Таблица 2 показывает контент поля SIG NDP ACK-кадра для 1 МГц, и таблица 3 показывает контент поля SIG NDP ACK-кадра для >= 2 МГц в качестве примеров NDP MAC-кадров. На предмет подробных описаний таблицы 2 и 3 обратитесь к проекту стандарта – IEEE P802.11ah.
[166]
Если значение длительности задается равным 1, поле длительности задается равным продолжительности, в миллисекундах, в течение которой период бездействия (в течение которого отсутствует передача кадров) ожидается от STA, которая получает ответ, начиная от конца ACK-ответа NDP.
[167]
Если поле индикатора длительности задается равным 0, поле длительности задается так, как описано в 8.2.5.7 (Setting for control response frames).
Если значение длительности задается равным 1, поле длительности задается равным продолжительности, в миллисекундах, в течение которой период бездействия (в течение которого отсутствует передача кадров) ожидается от STA, которая получает ответ, начиная от конца ACK-ответа NDP.
[168] Помимо этого, схема на основе динамического EIFS для SU/MU-кадра описывается следующим образом.
[169] Фиг. 12 является концептуальной схемой, иллюстрирующей структуру кадра для SU/MU-кадра.
[170] Однопользовательский (SU) кадр может использоваться в SU-MIMO, и многопользовательский (MU) кадр может использоваться в MU-MIMO. Ссылаясь на фиг. 12, поля STF, LTF1 и SIG-A (SIGNAL-A) могут соответствовать омничасти, поскольку они передаются во все STA во всех направлениях. Если необходимо, формирование диаграммы направленности или предварительное кодирование может не применяться к полям STF, LTF1 и SIG-A (SIGNAL-A) в случае передачи данных.
[171] Между тем, поля MU-STF, MU-LTF1,..., MU-LTF_NLTF и SIG-B (SIGNAL-B), расположенные после поля SIG-A, передаются конкретно для пользователя, и формирование диаграммы направленности или предварительное кодирование может применяться к каждому полю перед такой передачей. MU-часть может включать в себя поля MU-STF, MU-LTF, SIG-B и поля данных, как показано в формате кадра по фиг. 12.
[172] В омничасти каждое из полей STF, LTF1 и SIG-A может передаваться в качестве одного потока в ассоциации с каждой поднесущей, как представлено посредством следующего уравнения 1:
[173] уравнение 9

[174] В уравнении 9, k является индексом поднесущей (или тона), xk представляет собой сигнал, передаваемый в поднесущей k, и NTX является числом Tx-антенн. Qk является вектором-столбцом для кодирования (например, пространственного преобразования) сигнала, передаваемого на поднесущей (k), и dk является данными, вводимыми в кодер. В уравнении 9, задержка с циклическим сдвигом (CSD) временной области может применяться к Qk. CSD временной области обозначает циклический сдвиг фаз или сдвиг фаз в частотной области. Следовательно, Qk может включать в себя значение сдвига фаз на тоне (k), вызываемого посредством CSD временной области.
[175] В случае использования формата кадра по фиг. 12, поля STF, LTF1 и SIG-A могут приниматься посредством всех STA. Каждая STA может декодировать поле SIG-A через оценку канала на основе STF и LTF1.
[176] Поле SIG-A может включать в себя информацию длины/длительности, информацию полосы пропускания канала и информацию числа пространственных потоков. Поле SIG-A может иметь длину в два OFDM-символа. Один OFDM-символ использует модуляцию на основе двухпозиционной фазовой манипуляции (BPSK) для 48 тонов данных, так что 24-битовая информация может быть представлена в одном OFDM-символе. Соответственно, поле SIG-A может включать в себя 48-битовую информацию.
[177] Следующая таблица 4 показывает примерное выделение битов поля SIG-A относительно SU-случая и MU-случая.
[178]
[179] Поле SU/MU-индикатора может использоваться для того, чтобы различать между форматом SU-кадра и форматом MU-кадра.
[180] Поле длины/длительности представляет OFDM-символы (т.е. длительность) кадра или число байтов (т.е. длину) кадра. Если поле агрегирования поля SU задается равным значению 1, поле длины/длительности интерпретируется в качестве поля длительности. Напротив, если поле агрегирования задается равным нулю (0), поле длины/длительности интерпретируется в качестве поля длины. Поле агрегирования не задается в MU-кадре, и поле агрегирования всегда применяется к полю MU, так что поле длины/длительности интерпретируется в качестве поля длительности.
[181] Поле MCS указывает схему модуляции и кодирования для использования в PSDU-передаче. В случае SU-кадра поле MCS передается через поле SIG-A. Если другие STA (каждая из которых также может упоминаться в качестве сторонней STA, косвенно ассоциированной с передачей/приемом между двумя STA) выполнены с возможностью принимать SU-кадр, длительность SU-кадра (т.е. SU-кадра со сформированной диаграммой направленности, имеющего поле агрегирования в 0), принимаемого в данный момент, может вычисляться как на основе значения длины поля длины/длительности, так и на основе значения поля MCS. С другой стороны, в поле MU, поле MCS не содержится в поле SIG-A, а содержится в поле SIG-B, переносящем конкретную для пользователя информацию, так что независимая MCS может применяться для каждого пользователя.
[182] Поле BW представляет полосу пропускания канала SU-кадра или MU-кадра. Например, поле BW может задаваться равным конкретному значению, указывающему одно из 2 МГц, 4 МГц, 8 МГц, 16 МГц и 8+8 МГц.
[183] Поле агрегирования указывает то, агрегирована или нет PSDU в форме агрегированной MPDU (т.е. A-MPDU). Если поле агрегирования задается равным 1, это означает то, что PSDU агрегирована в форме A-MPDU и затем передана. Если поле агрегирования задается равным 0, это означает то, что PSDU передается без агрегирования. В MU-кадре всегда передается PSDU, сконфигурированная в форме A-MPDU, поле агрегирования не должно передаваться в служебных сигналах, так что PSDU не содержится в поле SIG-A.
[184] Поле пространственно-временного блочного кодирования (STBC) указывает то, применяется STBC к SU-кадру или MU-кадру.
[185] Поле кодирования указывает схему кодирования для использования в SU-кадре или MU-кадре. Схема на основе двоичного сверточного кода (BCC), схема на основе разреженного контроля по четности (LDPC) и т.д. может применяться к SU-кадру. Независимые схемы кодирования отдельных пользователей могут применяться к MU-кадру, так что поле кодирования, состоящее из 2 битов или больше, может задаваться с возможностью поддерживать независимые схемы кодирования.
[186] Поле короткого защитного интервала (SGI) указывает то, короткий GI применяется к PSDU-передаче SU-кадра или MU-кадра. В случае MU-кадра, если SGI применяется к MU-кадру, это означает то, что SGI может обычно применяться ко всем пользователям, содержащимся в MU-MIMO-группе.
[187] Поле GID представляет информацию многопользовательской (MU) группы MU-кадра. В случае SU-кадра, группа пользователей не должна задаваться, так что поле GID не содержится в поле SIG-A.
[188] Поле Nsts указывает число пространственно-временных потоков SU-кадра или MU-кадра. В случае MU-кадра, поле Nsts представляет число пространственных потоков каждой STA, содержащейся в соответствующей MU-группе, так что 8 битов требуются для поля Nsts. Подробнее, максимум 4 пользователя могут содержаться в одной MU-группе, и максимум пространственных потоков может передаваться каждому пользователю, так что 8 битов требуются для того, чтобы корректно поддерживать вышеуказанную структуру.
[189] Поле частичного AID (PAID) может представлять идентификатор STA, выполненный с возможностью идентифицировать приемную STA для использования в SU-кадре. PAID-значение в кадре восходящей линии связи (UL) состоит из некоторых частей идентификатора базового набора служб (BSSID). В кадре нисходящей линии связи (DL), PAID-значение может состоять из AID-хешированного результата STA. Например, BSSID может иметь длину в 48 битов, AID может иметь длину в 16 битов, и PAID может иметь длину в 9 битов.
[190] Поле индикатора ответного кадра указывает тип ответного кадра, который должен передаваться после SU-кадра или MU-кадра. Например, типы ответных кадров могут представлять собой отсутствие ответа, NDP-ответ, нормальный ответ, длинный ответ. Поле индикатора ответного кадра может упоминаться в качестве поля индикатора ответа.
[191] Если STA определяет тип ответного кадра на принимаемый кадр, она может прогнозировать значение поля длительности MPDU MAC-заголовка, даже если ошибка возникает в MPDU принимаемого кадра.
[192] Фиг. 13 показывает пример использования поля индикатора ответного кадра поля SIG PLCP-заголовка принимаемого кадра.
[193] Например, если поле индикатора ответного кадра указывает отсутствие ответа, STA может прогнозировать (или определять) то, что значение поля длительности MPDU MAC-заголовка принимаемого кадра равно 0.
[194] Если поле индикатора ответного кадра указывает NDP-ответ (или ответ по NDP-управлению), STA может прогнозировать (или определять) то, что значение поля длительности MPDU MAC-заголовка принимаемого кадра составляет время передачи PLCP-заголовка плюс SIFS.
[195] Если поле индикатора ответного кадра указывает нормальный ответ (или нормальный ответ по управлению), STA может прогнозировать (или определять) то, что значение поля длительности MPDU MAC-заголовка принимаемого кадра составляет время передачи CTS/ACK/BlockACK плюс SIFS.
[196] Если поле индикатора ответного кадра указывает длинный ответ, STA может прогнозировать (или определять) то, что значение поля длительности MPDU MAC-заголовка принимаемого кадра составляет время MAX_PPDU-передачи плюс SIFS для указания любого ответного кадра.
[197] Между тем, поле SIG-B в MU-кадре, показанном на фиг. 12, дополнительно может включать в себя конкретную для пользователя информацию. Следующая таблица 5 примерно показывает поля, используемые в качестве составляющих элементов поля SIG-B MU-кадра. Помимо этого, таблица 5 примерно показывает различные параметры, применяемые к PPDU соответствующих полос пропускания (BW) в 2, 4, 8 и 16 МГц.
[198]
[199] В таблице 5, поле MCS может указывать поле MCS PPDU, передаваемой в форме MU-кадра в расчете на пользователя.
[200] Концевой бит может предоставлять возможность кодеру возвращаться в нулевое (0) состояние.
[201] Поле CRC (циклического избыточного кода) может использоваться для того, чтобы обнаруживать ошибку из STA, выполненной с возможностью принимать MU-кадр.
[202] Согласно вышеописанной схеме на основе динамического EIFS, STA принимает PPDU, имеющую ошибку в PLCP-заголовке, STA определяет то, соответствует или нет время передачи (число OFDM-символов) PPDU одному из NDP MAC-кадров (т.е. время передачи принимаемой PPDU соответствует 6 символам или 14 символам). Если STA принимает MU-кадр, имеющий время передачи, отличное от 6 символов или 14 символов, STA считает то, что принимаемая PPDU с ошибкой не представляет собой ни один из NDP MAC-кадров, и затем STA вычисляет EIFS с учетом ACKTxTime и aSIFSTime, приводя к EIFS=aSIFSTime+DIFS+ACKTxTime.
[203] Улучшение вышеописанной схемы на основе динамического EIFS включает в себя задание EIFS на основе того, что ошибка принимаемого кадра возникает в SIG-A или SIG-B. В частности, если STA принимает кадр с ошибкой, EIFS задается равным различным значениям (или динамическим значениям) на основе, по меньшей мере, одного из CRC-состояния SIG-A или CRC-состояния SIG-B.
[204] Таблица 6 показывает примеры задания EIFS-значений на основе SIG-A CRC-состояния и SIG-B CRC-состояния.
[205]
[206] В таблице 6, SIG-A/SIG-B CRC-состояние "пройдено" (или CRC OK) означает то, что SIG-A/SIG-B успешно декодируется, и примитив PHY-RXEND.indication не содержит FormatViolation. SIG-A/SIG-B CRC-состояние "сбой" означает то, что SIG-A/SIG-B не декодируется успешно, и примитив PHY-RXEND.indication задается равным FormatViolation.
[207] Как показано в таблице 6, даже если SIG-B CRC-состояние представляет собой "пройдено", если SIG-A CRC-состояние представляет собой "сбой", значение EIFS-параметра задается равным aSIFSTime+DIFS+ACKTxTime. Помимо этого, даже если SIG-B CRC-состояние представляет собой "сбой", если SIG-A CRC-состояние представляет собой "пройдено", значение EIFS-параметра задается согласно полю индикатора ответного кадра в SIG-A. Другими словами, независимо от SIG-B CRC-состояния, EIFS динамически задан согласно SIG-A CRC-состоянию.
[208] Если STA прогнозирует значение поля длительности MPDU MAC-заголовка и задает NAV (или виртуальное считывание несущей) с использованием поля индикатора ответного кадра в SIG-A, EIFS может быть просто задан равным DIFS (т.е. EIFS=DIFS). Соответственно, EIFS-параметр может задаваться так, как показано в таблице 7, если STA выполнена с возможностью задавать NAV (или виртуальный контроль несущей) с использованием индикатора ответного кадра.
[209]
[210] Как показано в таблице 7, EIFS задается равным DIFS, если STA принимает кадр, имеющий CRC-сбой в SIG-A (например, если STA принимает кадр, для которого примитив PHY-RXEND.indication не содержит FormatViolation). Иначе (например, если STA принимает кадр, для которого примитив PHY-RXEND.indication содержит FormatViolation), EIFS для STA получается посредством уравнения 5 (т.е. EIFS=aSIFSTime+DIFS+ACKTxTime). Помимо этого, таблица 7 показывает то, что не SIG-B CRC-состояние, а SIG-A CRC-состояние оказывает влияние на динамическое значение EIFS-параметра. Соответственно, EIFS задается равным динамическому значению на основе SIG-A CRC-состояния, как показано в таблице 8.
[211]
[212] Помимо этого, для различных примеров динамического EIFS с использованием параметра ACKTxTime, ACKTxTime может задаваться или вычисляться на основе значения поля индикатора ответного кадра. Например, если поле индикатора ответного кадра указывает нормальный ответ, ACKTxTime задается равным продолжительности, требуемой для того, чтобы передавать время нормальной передачи. Если поле индикатора ответного кадра указывает NDP-ответ, ACKTxTime задается равным продолжительности, требуемой для того, чтобы передавать NDP MAC-кадр для 1 МГц (фиг. 11(b)) или NDP MAC-кадр для >= 2 МГц (фиг. 11(a)).
[213] Фиг. 14 является блок-схемой последовательности операций способа, иллюстрирующей способ для доступа к каналу согласно настоящему изобретению.
[214] STA может находиться в состоянии RX-бездействия и выполняет CS/CCA-процедуру, в то время как приемное устройство STA включается, и STA в данный момент не принимает или передает пакет, чтобы обнаруживать начало сигнала из других объектов, которые могут приниматься (CS), и определять то, готов или нет канал, до передачи пакета (CCA).
[215] На этапе S1410, STA может принимать кадр. В частности, STA может обнаруживать поле SIG-A кадра. При приеме кадра, STA может тестировать CRC принимаемого поля SIG-A кадра.
[216] Между тем, в случае CRC-сбоя, STA может задавать примитив PHY-RXEND.indication таким образом, чтобы указывать FormatViolation. В противном случае, STA может задавать примитив PHY-RXEND.indication равным другому значению (например, NoError, CarrierLost или UnsupportedRate).
[217] На этапе S1420, STA определяет то, является или нет беспроводная среда бездействующей, с использованием определенного временного интервала. STA может использовать временной интервал, указываемый посредством EIFS, перед выполнением передачи в беспроводной среде, когда STA определяет то, что среда является бездействующей после приема кадра, для которого примитив PHY-RXEND.indication содержит ошибку, или кадра, для которого значение MAC FCS не является корректным.
[218] Здесь, EIFS может быть динамически сконфигурирован (либо вычислен или задан) согласно настоящему изобретению. Например, EIFS задается равным DIFS, если кадр не имеет CRC-сбоя при приеме поля SIG-A принимаемого кадра (или если STA принимает кадр, для которого примитив PHY-RXEND.indication не содержит FormatViolation). В противном случае, EIFS получается посредством уравнения EIFS=aSIFSTime+DIFS+ACKTxTime, если кадр имеет CRC-сбой при приеме поля SIG-A принимаемого кадра (или если STA принимает кадр, для которого примитив PHY-RXEND.indication содержит FormatViolation).
[219] На этапе S1430, STA может начинать передачу в беспроводной среде, если беспроводная среда определяется как бездействующая в течение временного интервала, указываемого посредством EIFS. STA может выполнять процедуру задержки, если беспроводная среда определяется как занятая.
[220] Для способа согласно настоящему изобретению, как показано на фиг. 14, различные варианты осуществления настоящего изобретения выполняются независимо, либо два или более вариантов осуществления настоящего изобретения выполняются одновременно.
[221] В целях упрощения пояснения технологии показаны и описаны как последовательность действий, необходимо понимать и принимать во внимание, что технологии не ограничены порядком действий, поскольку некоторые действия могут, в соответствии с одним или более вариантов осуществления, выполняться в другом порядке и/или параллельно с действиями, отличными от действий, показанных и описанных в данном документе. Например, специалисты в данной области техники должны понимать и принимать во внимание, что технология может быть альтернативно представлена как последовательность взаимосвязанных состояний или событий, к примеру, на диаграмме состояний. Более того, не все проиллюстрированные действия могут быть использованы для того, чтобы реализовывать технологию в соответствии с одним или более вариантов осуществления.
[222] Фиг. 15 является блок-схемой, иллюстрирующей беспроводное устройство согласно настоящему изобретению.
[223] Ссылаясь на фиг. 15, STA 10 может включать в себя процессор 11, запоминающее устройство 12 и приемо-передающее устройство 13. Приемо-передающее устройство 13 может передавать/принимать сигналы и может реализовывать физический уровень согласно IEEE 802-системе. Процессор 11 может соединяться с приемо-передающим устройством 13 и может реализовывать физический уровень и/или MAC-уровень согласно IEEE 802-системе. Процессор 11 может быть выполнен с возможностью работать согласно вышеописанным различным вариантам осуществления настоящего изобретения. Модули для реализации работы STA согласно вышеописанным различным вариантам осуществления настоящего изобретения сохраняются в запоминающем устройстве 12 и могут реализовываться посредством процессора 11. Запоминающее устройство 12 может быть включено в процессор 11 или может устанавливаться за пределами процессора 11 для соединения посредством известного средства с процессором 11.
[224] STA 10, показанная на фиг. 15, может быть выполнена с возможностью осуществлять схему доступа к каналу настоящего изобретения. Например, процессор 11 может быть выполнен с возможностью управлять приемо-передающим устройством 13, чтобы принимать кадр. Процессор 11 может быть дополнительно выполнен с возможностью определять то, является или нет беспроводная среда бездействующей, с использованием EIFS перед выполнением передачи в беспроводной среде. Процессор 11 может использовать временной интервал, указываемый посредством EIFS, перед выполнением передачи в беспроводной среде, когда процессор 11 определяет то, что среда является бездействующей после приема кадра, для которого примитив PHY-RXEND.indication содержит ошибку, или кадра, для которого значение MAC FCS не является корректным.
[225] Здесь, EIFS может быть динамически сконфигурирован (либо вычислен или задан) согласно настоящему изобретению. Например, EIFS задается равным DIFS, если кадр не имеет CRC-сбоя при приеме поля SIG-A принимаемого кадра (или если STA принимает кадр, для которого примитив PHY-RXEND.indication не содержит FormatViolation). В противном случае, EIFS получается посредством уравнения EIFS=aSIFSTime+DIFS+ACKTxTime, если кадр имеет CRC-сбой при приеме поля SIG-A принимаемого кадра (или если STA принимает кадр, для которого примитив PHY-RXEND.indication содержит FormatViolation).
[226] Помимо этого, процессор 11 может управлять приемо-передающим устройством таким образом, чтобы начинать передачу в беспроводной среде, если беспроводная среда определяется как бездействующая в течение временного интервала, указываемого посредством EIFS. Процессор 11 может выполнять процедуру задержки, если беспроводная среда определяется как занятая.
[227] Общая конфигурация STA 10 может быть реализована таким образом, что вышеописанные различные варианты осуществления настоящего изобретения могут независимо применяться, либо два или более вариантов осуществления этого могут одновременно применяться, и повторное описание опускается для ясности.
[228] Помимо этого, процессор 11 может иметь многоуровневые структуры, MAC-подуровень на канальном уровне (DLL) и физическом уровне (PHY), в числе прочего. PHY может включать в себя объект на основе процедуры конвергенции физического уровня (PLCP) и зависимый от физической среды (PMD) объект. Как MAC-подуровень, так и PHY концептуально включают в себя управляющие объекты, называемые управляющим объектом MAC-подуровня (MLME) и управляющим объектом физического уровня (PLME), соответственно. Эти объекты (MLME и PLME) предоставляют интерфейсы предоставления услуг управления уровнем, через которые могут активироваться функции управления уровнем.
[229] Чтобы предоставлять корректную работу MAC, управляющий объект станции (SME) присутствует в каждой STA. SME представляет собой независимый от уровня объект, который может рассматриваться как находящийся в отдельной плоскости управления или как находящийся "в стороне". Точные функции SME не указываются в этом документе, но в общем SME может рассматриваться как отвечающий за такие функции, как сбор зависимого от уровня состояния из различных управляющих объектов уровней (LME) и аналогично задание значения конкретных для уровня параметров. SME типично должен выполнять такие функции от имени общих системных управляющих объектов и должен реализовывать стандартные протоколы управления.
[230] Вышеописанные объекты взаимодействуют различными способами. Например, объекты могут быть, взаимодействуют посредством обмена примитивами GET/SET. Примитив является набором элементов или параметров, связанных с конкретной целью. Примитив XX-GET.request используется для запроса значения данного атрибута базы управляющей информации (MIBattribute). Примитив XX-GET.confirm используется для возвращения надлежащего значения MIB-атрибута, если состояние="успешность", в противном случае возвращения индикатора ошибки в поле состояния. Примитив XX-SET.request используется для запроса того, что указываемый MIB-атрибут должен задаваться равным данному значению. Если этот MIB-атрибут подразумевает конкретную операцию, то он запрашивает то, что операция выполняется. Так же, примитив XX-SET.confirm используется таким образом, что если состояние="успешность", он подтверждает то, что указываемый MIB-атрибут задан равным запрашиваемому значению, иначе он возвращает состояние ошибки в поле состояния. Если этот MIB-атрибут подразумевает конкретную операцию, то он подтверждает то, что операция выполнена.
[231] Различными примитивами PLME_GET/SET можно обмениваться между PLME и SME через PLME_SAP и между MLME и PLME через MLME-PLME_SAP.
[232] Вышеописанные варианты осуществления могут быть реализованы посредством различных средств, например, посредством аппаратных средств, микропрограммного обеспечения, программного обеспечения или комбинации вышеозначенного.
[233] В аппаратной конфигурации, способ согласно вариантам осуществления настоящего изобретения может быть реализован посредством одной или более специализированных интегральных схем (ASIC), процессоров цифровых сигналов (DSP), устройств обработки цифровых сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров или микропроцессоров.
[234] В микропрограммной или программной конфигурации, способ согласно вариантам осуществления настоящего изобретения может быть реализован в форме модулей, процедур, функций и т.д., выполняющих вышеописанные функции или операции. Программный код может быть сохранен в запоминающем устройстве и выполнен посредством процессора. Запоминающее устройство может находиться внутри или за пределами процессора и может передавать и принимать данные в/из процессора через различные известные средства.
[235] Подробное описание предпочтительных вариантов осуществления настоящего изобретения приведено для того, чтобы давать возможность специалистам в данной области техники реализовывать и осуществлять на практике изобретение. Хотя изобретение описано в отношении предпочтительных вариантов осуществления, специалисты в данной области техники должны принимать во внимание, что различные модификации и изменения могут вноситься в настоящее изобретение без отступления от сущности или объема изобретения, описанного в прилагаемой формуле изобретения. Соответственно, изобретение не должно ограничиваться конкретными вариантами осуществления, описанными в данном документе, а должно удовлетворять самому широкому объему, согласованному с принципами и новыми признаками, раскрытыми в данном документе.
Промышленная применимость
[236] Хотя вышеуказанные различные варианты осуществления настоящего изобретения описаны на основе системы IEEE 802.11, варианты осуществления могут применяться таким же образом к различным системам мобильной связи.

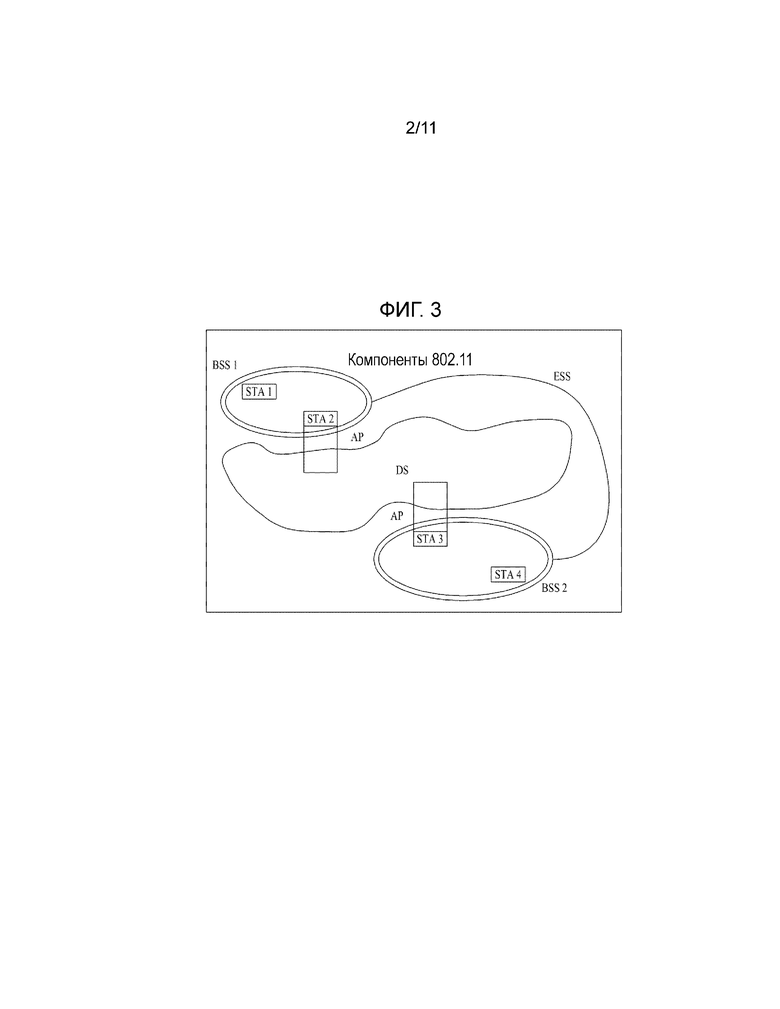
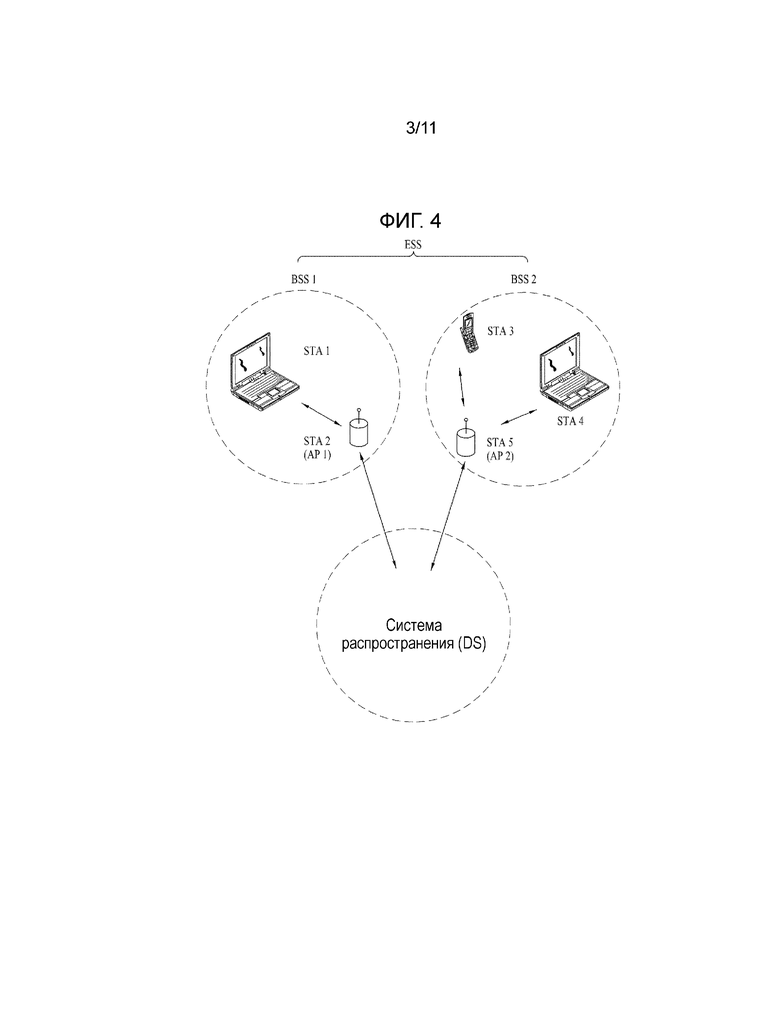
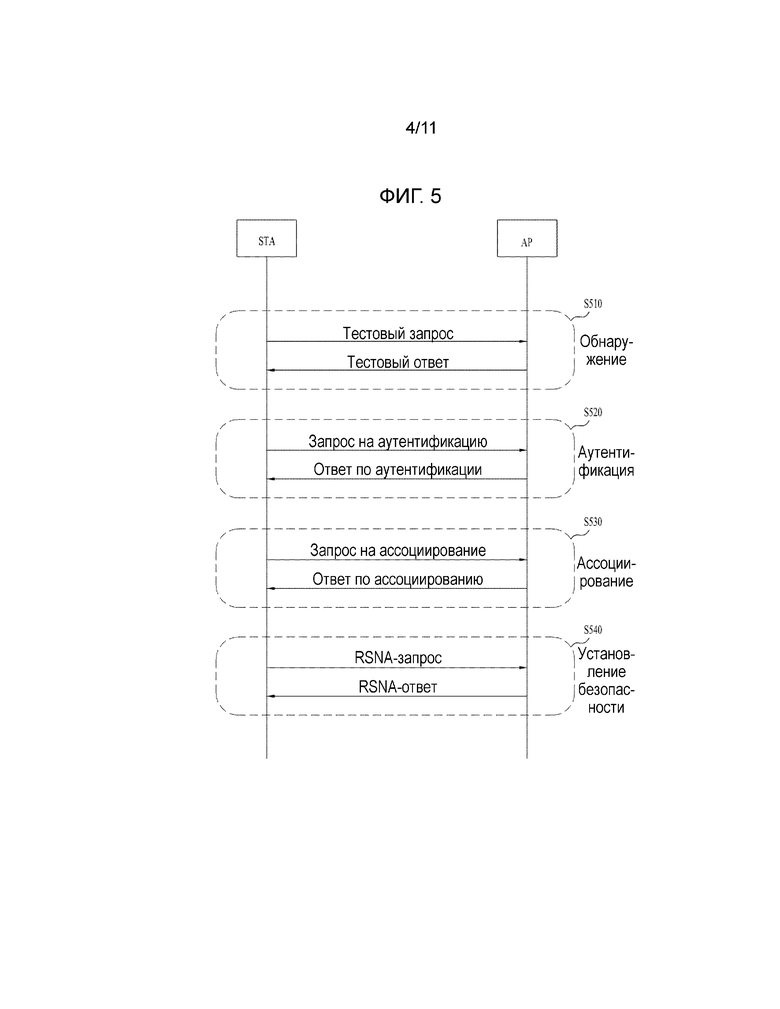
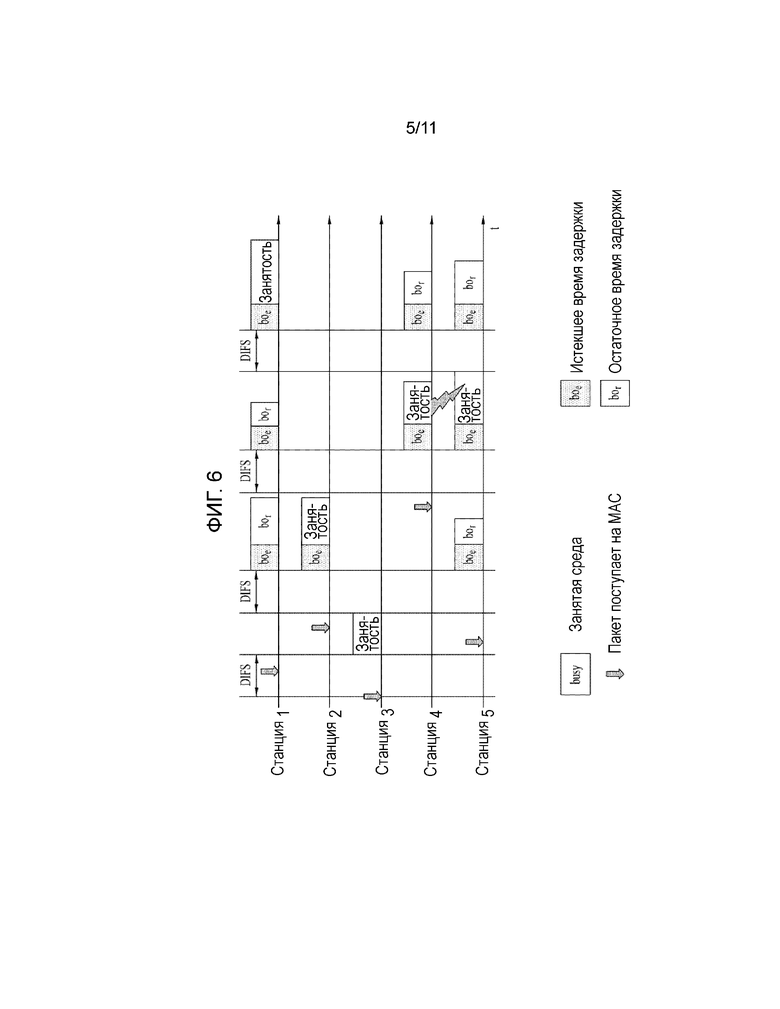

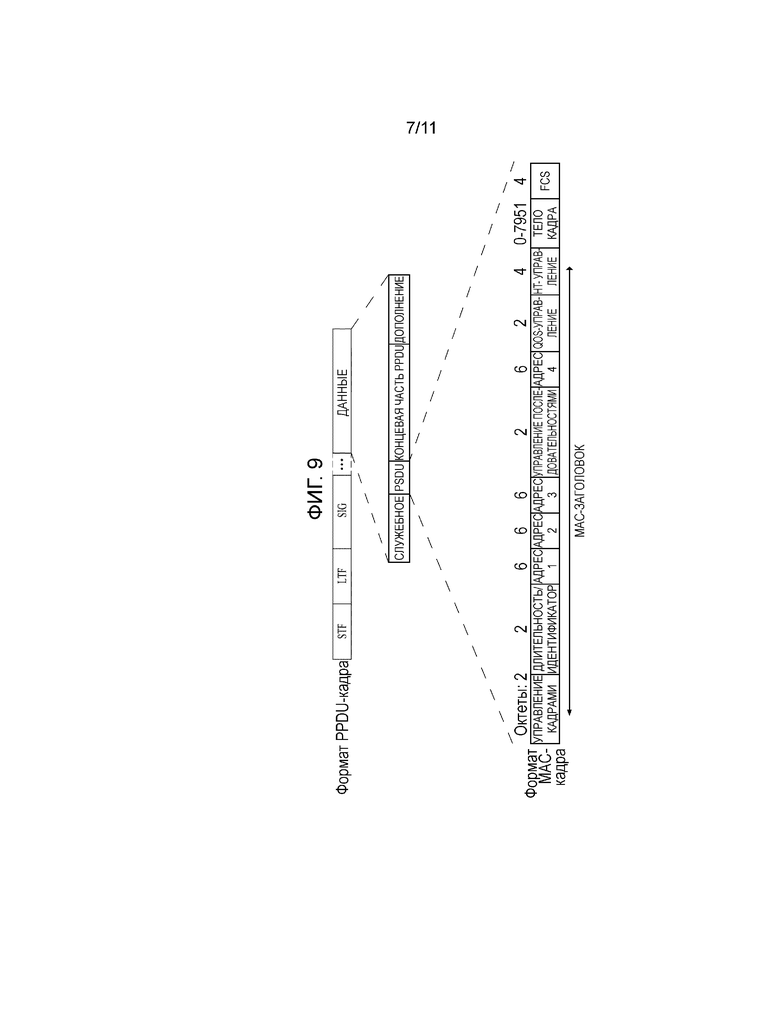
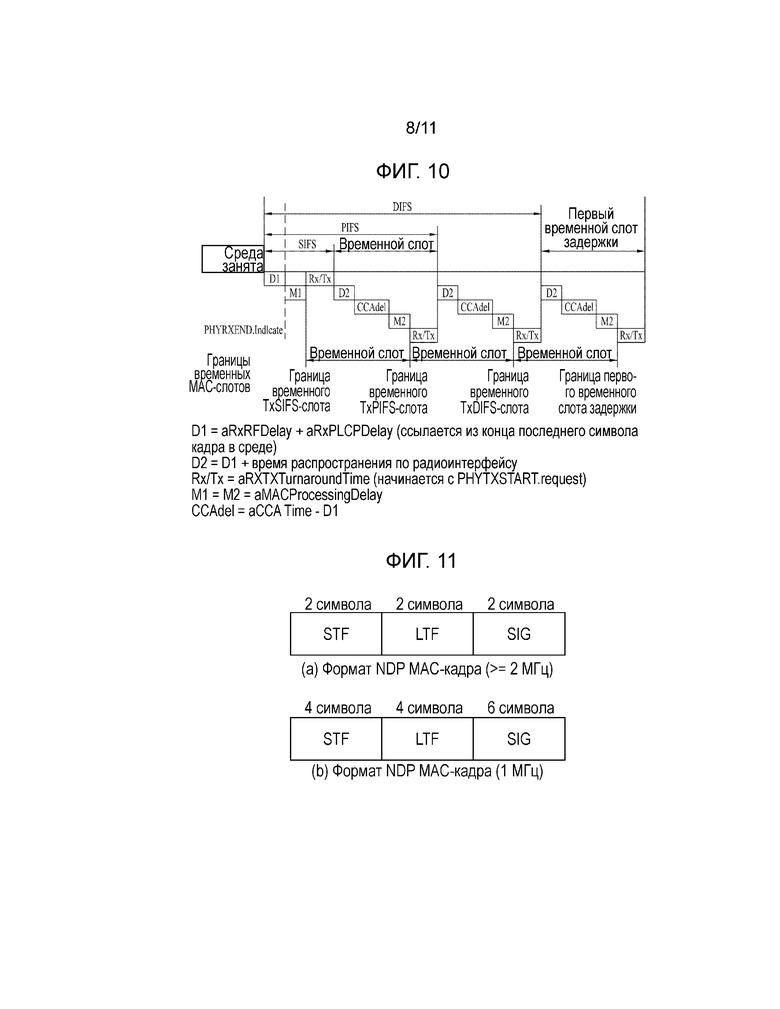



Изобретение относится к способу для доступа к каналу в системе на основе беспроводной LAN (WLAN), осуществляемому посредством станции (STA). Технический результат заключается в обеспечении регулирования и управления расширенным межкадровым интервалом (EIFS) в системе на основе WLAN, чтобы поддерживать защиту ответных кадров и доступ к каналу. Способ содержит этапы, на которых: принимают кадр, содержащий поле SIGNAL-A (SIG-A); и определяют, является или нет беспроводная среда бездействующей, с использованием временного интервала, указываемого посредством EIFS, перед выполнением передачи в беспроводной среде. При этом если кадр имеет сбой циклического избыточного кода (CRC) при приеме поля SIG-A, EIFS задается равным сумме aSIFSTime, межкадрового интервала функции распределенной координации (DIFS) и ACKTxTime, где aSIFSTime является номинальным значением короткого межкадрового интервала (SIFS), и ACKTxTime является временем, требуемым для передачи АСК-кадра, и при этом если кадр не имеет сбоя CRC при приеме поля SIG-A, EIFS сокращается до DIFS. 2 н. и 9 з.п. ф-лы, 15 ил., 8 табл.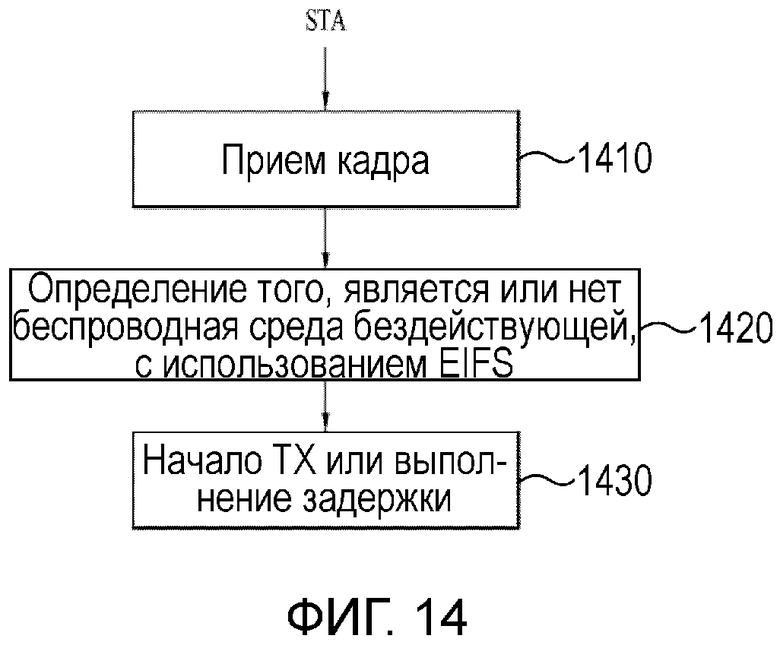
1. Способ, осуществляемый посредством станции (STA) для доступа к каналу в системе на основе беспроводной локальной вычислительной сети, содержащий этапы, на которых:
принимают кадр, содержащий поле SIGNAL-A (SIG-A); и
определяют, является или нет беспроводная среда бездействующей, с использованием временного интервала, указываемого посредством расширенного межкадрового интервала (EIFS), перед выполнением передачи в беспроводной среде,
при этом если кадр имеет сбой циклического избыточного кода (CRC) при приеме поля SIG-A, EIFS задается равным сумме aSIFSTime, межкадрового интервала функции распределенной координации (DIFS) и ACKTxTime, где aSIFSTime является номинальным значением короткого межкадрового интервала (SIFS), и ACKTxTime является временем, требуемым для передачи АСК-кадра, и
при этом если кадр не имеет сбоя CRC при приеме поля SIG-A, EIFS сокращается до DIFS.
2. Способ по п. 1, в котором примитив PHY-RXEND.indication не содержит значение FormatViolation, если кадр не имеет сбоя CRC при приеме поля SIG-A принимаемого кадра.
3. Способ по п. 1, в котором DIFS получают посредством уравнения DIFS=aSIFSTime+2 х aSlotTime, при этом aSlotTime является номинальной длительностью временного слота.
4. Способ по п. 1, в котором примитив PHY-RXEND.indication содержит значение FormatViolation, если кадр имеет сбой CRC при приеме поля SIG-A принимаемого кадра.
5. Способ по п. 1, в котором поле SIG-A включает в себя поле индикатора ответного кадра.
6. Способ по п. 5, в котором поле индикатора ответного кадра указывает одно из отсутствия ответа, ответа с пакетом без данных (NDP), нормального ответа и длинного ответа, при этом вектор резервирования сети (NAV) задается на основе типа кадра, указываемого полем индикатора ответного кадра.
1. Способ по п. 1, в котором STA начинает передачу в беспроводной среде, если беспроводная среда определена как бездействующая в течение временного интервала, указываемого посредством EIFS.
2. Способ по п. 1, в котором STA выполняет процедуру задержки после ожидания в течение временного интервала, указываемого посредством EIFS, если беспроводная среда определена как занятая.
3. Способ по п. 1, в котором STA работает в нелицензированной полосе частот до 1 ГГц.
4. Способ по п. 1, в котором EIFS задается на основе состояния CRC поля SIG-A принимаемого кадра, независимо от состояния CRC поля SIG-B принимаемого кадра.
5. Устройство станции (STA) для доступа к каналу в системе на основе беспроводной локальной вычислительной сети, причем STA-устройство содержит:
приемо-передающее устройство; и процессор,
при этом процессор выполнен с возможностью:
управлять приемо-передающим устройством таким образом, чтобы принимать кадр, содержащий поле SIGNAL-A (SIG-A); и
определять, является или нет беспроводная среда бездействующей, с использованием временного интервала, указываемого посредством расширенного межкадрового интервала (EIFS), перед выполнением передачи в беспроводной среде,
при этом если кадр имеет сбой циклического избыточного кода (CRC) при приеме поля SIG-A, EIFS задается равным сумме aSIFSTime, межкадрового интервала функции распределенной координации (DIFS) и ACKTxTime, где aSIFSTime является номинальным значением короткого межкадрового интервала (SIFS), и ACKTxTime является временем, требуемым для передачи АСК-кадра, и
при этом если кадр не имеет сбоя CRC при приеме поля SIG-A, EIFS сокращается до DIFS.
| US 6987770 B1, 17.01.2006 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ НАДЕЖНОЙ РАССЫЛКИ СИНХРОКАДРОВ (БИКОНОВ) В БЕСПРОВОДНОЙ ЛОКАЛЬНОЙ mesh-СЕТИ | 2009 |
|
RU2408167C1 |

