Изобретение относится к области оперативного дистанционного мониторинга зданий и сооружений при исследовании их прочностных свойств в условиях вибрационного воздействия естественного и техногенного происхождения.
Проблема заключается в необходимости определения динамических характеристик, фиксируемых в паспорте здания, по динамике изменения которых во времени принимается решение о его техническом состоянии и возможности дальнейшей эксплуатации (в текущий момент времени или прогнозируемый на заданную дату).
Специфика зданий такова, что в штатных условиях эксплуатации они совершают микроколебания под воздействием микросейсмического фона естественного и техногенного происхождения. Иными словами амплитуды колебаний, за редким исключением, на всех частотах спектра мало отличаются друг от друга. Точность же существующих измерительных датчиков (трехосных акселерометров), оцениваемая по величине среднеквадратической ошибки единичного измерения, сравнима по абсолютной величине с амплитудами колебаний здания. Кроме того, зарегистрированные измерения проекций линейного ускорения (виброграммы, являющиеся исходными данными для определения частот собственных колебаний) искажены проекциями вектора ускорения силы тяжести на оси акселерометра, что также искажает истинную картину анализируемых колебаний. Эти факторы приводят к тому, что спектр частот колебаний здания, определяемый в результате известного и реализуемого практически во всех системах мониторинга разложения Фурье, имеет «размытый» характер в области частоты основного тона и наиболее значимых обертонов, а иногда данный спектр очень близок к сплошному. В связи с этим возникает основная проблема - достоверного определения в таком спектре искомых частот.
В общем виде способы решения данной проблемы, применяемые на практике, можно условно разделить на три категории:
1) Используется принудительное возбуждение колебаний здания при помощи устройств нагружения, позволяющих получить отклик на частоте основного тона и наиболее значимых обертонов, имеющий более высокую амплитуду, чем амплитуда колебаний в результате повседневного воздействия микросейсмического фона естественного и техногенного происхождения. Недостаток способа очевиден. Хотя способ и направлен на компенсацию явления «размытости» спектра частот в окрестности частоты основного тона или обертонов, но его реализация не позволяет проводить непрерывный дистанционный мониторинг по причине негативного влияния на повседневную эксплуатацию зданий и сооружений. Также ясно, что частота основного тона и, тем более, частоты обертонов не всегда точно известны, поэтому возможное ошибочное задание частоты вынужденных колебаний в устройстве нагружения может привести к искажению результатов, которые фиксируются в паспорте здания и по которым принимается решение о его техническом состоянии.
2) Возможно применение более точных измерительных устройств (акселерометров), регистрирующих первичные измерительные данные для определения частот собственных колебаний. Недостаток данного способа следующий. Каждое здание индивидуально, так как даже если это типовой тиражируемый проект, при его возведении и эксплуатации всегда возникнут особенности, приводящие к отличию динамических характеристик, указываемых в паспорте здания согласно ГОСТ Ρ 53778-2010, ГОСТ 31937-2011. Это делает затруднительным формирование требований по точности измерительных устройств, применяемых в системе мониторинга. А требование по применению измерительных средств, имеющих наивысшую точность из возможных, обязательно связано с ограничениями финансового характера. Кроме того, в условиях малого превышения полезного сигнала над шумом эффект от реализации данного способа может оказаться хуже ожидаемого.
3) Определение частот собственных колебаний в области их модельных (расчетных) значений, ограниченной некоторой пороговой величиной (или интервала возможных значений, например, ГОСТ Ρ 54859-2011). Недостаток применения данного способа состоит в том, что модели, применяемые для расчета динамических характеристик зданий и сооружений, основываются на целом ряде упрощений и допущений, которые на практике могут оказаться неадекватными реальным условиям. В этом случае способ приводит к ошибочным результатам.
Кроме того, конкретными недостатками способа, реализованного в упомянутом выше ГОСТ Ρ 54859-2011, по сравнению с предлагаемым нами являются: а. Необходимость задания интервала, в котором определяется частота основного тона собственных колебаний. Очевидно, что в случае ошибочного задания данного интервала, что является наиболее вероятным для технически сложных и уникальных объектов, результат будет ошибочным. Второй недостаток аналогичен основному недостатку метода максимума апостериорной вероятности по сравнению с методами наибольшего правдоподобия или метода наименьших квадратов, это - смещение оценок в сторону априорных данных, верных или неверных.
b. Простой выбор максимума в интервале, что реализовано в указанном способе, не учитывает простого факта, состоящего в том, что разложение Фурье аддитивно. То есть вместо истинного максимума может быть определен максимум, содержащий погрешность. Частичная компенсация этого недостатка предусмотрена за счет многократного повторения вычислений. А сколько их должно быть проведено для достижения достоверного результата в общем случае неизвестно, так как закон больших чисел требует стремления к бесконечному числу повторений.
c. Необходимость многократного повторения вычислений, не являющихся элементарными, требует значительных вычислительных и временных ресурсов, что усложняет техническую реализацию системы мониторинга особенно для крупных объектов, оснащенных большим числом первичных измерительных датчиком.
Общий же недостаток способов всех категорий заключается в том, что не предусмотрено исключение составляющих вектора силы тяжести, содержащихся в первичных измерениях проекций линейного ускорения. Эти составляющие совместно с реализациями погрешностей измерений значительно искажают характер первичной виброграммы, по которой в последующем оцениваются частоты собственных колебаний зданий и сооружений. Наибольшая актуальность данного вопроса имеет место тогда, когда мониторинг осуществляется без применения устройств возбуждения колебаний.
Известен способ планово-предупредительного контроля физического состояния зданий и сооружений (патент РФ на изобретение №2163009, МПК G01M 7/02, 06.01.1999) включающий определение динамических характеристик объекта по измерениям его колебаний под воздействием вибрации, измерение пространственных микроколебаний объекта под воздействием микросейсмического фона естественного и техногенного происхождения, в условиях которого находится обследуемый объект, или под воздействием управляемого источника вибраций.
В способе отсутствует описание реализации определения частот собственных колебаний, тогда как первичные измерения ускорений пространственных микроколебаний объекта под воздействием микросейсмического фона естественного и техногенного происхождения приводят к «размытому» спектру частот, для выделения искомой частоты в котором потребуется надежная априорная информация о ней, например, в виде интервала частот. Простой же поиск максимума неизбежно приводит к ошибочным результатам.
Известны способ мониторинга и прогнозирования технического состояния зданий и сооружений и система мониторинга и прогнозирования технического состояния зданий и сооружений (варианты) (патент РФ на изобретение №2381470, МПК G01M 7/00, 26.02.2008).
Способ мониторинга и прогнозирования технического состояния здания и сооружения, состоит в том, что на здании или сооружении устанавливают блок датчиков и оборудования автоматизированной системы мониторинга, определяют по данным измерений этих датчиков и/или оборудования параметры технического состояния объекта, осуществляют фильтрацию параметров технического состояния объекта на две группы параметров: группу параметров технического состояния нижней части и группу параметров технического состояния верхней части объекта, определяют на основе параметров технического состояния нижней части объекта расчетные параметры строительных конструкций верхней части объекта, сравнивают расчетные параметры строительных конструкций верхней части объекта с аналогичными параметрами строительных конструкций верхней части объекта, определенных по результатам натурных измерений датчиками системы мониторинга, корректируют параметры математической модели объекта при условии, что расчетные параметры строительных конструкций верхней части определенных по результатам натурных измерений на величину больше заданного порога, определяют по измеренным параметрам технического состояния нижней части тренды параметров технического состояния нижней части объекта, экстраполируют трендовые значения параметров технического состояния нижней части объекта на заданный временной интервал, определяют на основе данных экстраполяции параметров технического состояния нижней части объекта прогнозные расчетные параметры технического состояния строительных конструкций верхней части объекта, фиксируют для потребителя прогнозную оценку будущего технического состояния объекта на основе сравнительного анализа прогнозных расчетных параметров технического состояния строительных конструкций верхней части объекта с предельно допустимыми значениями. Система мониторинга и прогнозирования технического состояния зданий и сооружений, которая реализует вышеприведенный способ, включает устройство ударного воздействия, блок датчиков и оборудования автоматизированной системы мониторинга, блок расчета параметров технического состояния объекта, блок фильтрации параметров технического состояния объекта, блок определения трендов и экстраполяции параметров технического состояния нижней части объекта, блок сравнения, пороговое устройство, блок математического моделирования и расчета параметров технического состояния верхней части, блок корректировки параметров математической модели объекта, электронный ключ, блок отображения прогнозной и мониторинговой информации, блок обработки и выходной информации, блок градации выходной информации. При этом, как вариант, система мониторинга технического состояния зданий и сооружений может быть выполнена с возможностью реагирования на ударное воздействие в виде микросейсмического фона и/или техногенного характера. Технический результат - создание способа мониторинга и прогноза технического состояния объекта и системы для его осуществления, которые позволили бы на ранней стадии развития неблагоприятных сейсмических и/или гидрогеологических процессов осуществить прогнозную оценку будущего технического состояния наземной части объекта на длительный временной интервал и тем самым позволили бы, при необходимости, реализовать комплекс превентивных мер по предотвращению разрушения объекта
Во-первых, способ предполагает возбуждение колебаний объекта мониторинга при помощи специальных устройств. Недостаток описан выше.
В нем вскользь упоминается, что динамические характеристики здания (в том числе и собственные частоты), определяются с использованием экспериментальных данных и математической модели объекта. При этом в качестве экспериментальных динамических характеристик принимаются те значения, которые не превышают некоторого порога отличия от данных полученных расчетным путем с использованием математической модели.
Во-вторых, основной недостаток очевиден: математическая модель основывается на допущениях о конструкции и поведении объекта, а также условиях его эксплуатации, которые на практике могут оказаться неадекватными реальным условиям. Поэтому модельные значения динамических характеристик могут оказаться недостоверными и, если их использовать совместно с экспериментальными данными для определения динамической характеристики, можно получить ошибочный результат. Такой же недостаток присущ и ГОСТ Ρ 54859-2011.
Известны способ мониторинга безопасности несущих конструкций, конструктивных элементов зданий и сооружений и система для его осуществления (патент РФ на изобретение №2413193, МПК G01M 7/00, 26.03.2009).
Способ заключается в создании компьютерных моделей сооружения, моделей нагрузок и воздействий на него, расчете характеристик несущих конструкций с формированием матрицы граничных значений этих характеристик и определении категорий состояния здания и показателей изменения состояния несущих конструкций и точек несущих конструкций, критически важных для безопасности сооружения. При этом производят измерения с помощью датчиков, установленных в критически важных точках, интегральных характеристик несущих конструкций, производят сбор и обработку данных с датчиков и сравнивают измеренные интегральные характеристики с элементами матрицы граничных значений этих характеристик. По результатам сравнения осуществляют категорирование состояния сооружения и отображают средствами отображения информацию о текущей категории состояния сооружения, в случае наступления критически важных ухудшений состояния безопасности несущих конструкций сооружения осуществляют передачу информации потребителям по каналам связи. При этом проводят периодическую проверку и настройку системы с помощью блока нагружения непрерывного действия, размещенного в критически важной точке и вырабатывающего сигнал нагружения и опроса датчиков системы, и проводят обработку полученной информации. При изменении значений интегральных характеристик несущих конструкций проводят корректировку матрицы граничных значений интегральных характеристик состояния здания/сооружения. Система содержит не менее одного блока нагружения непрерывного действия, вырабатывающего сигнал нагружения произвольно заданной формы и/или частоты, блок определения собственных частот колебаний, блок измерения ускорений колебаний, блок измерения амплитуд колебаний, блок измерения скоростей колебаний, блок измерения наклонов, блок измерения прогибов, блок измерения напряжений, блок измерения нагрузок, блок измерения абсолютной и неравномерной осадки, блок измерения геодезических параметров, блок обработки и выходной информации, блок градации выходной информации, предназначенный для категорирования уровня безопасности здания/сооружения, блок измерения уровня грунтовых вод, блок измерения влажности, блок влагомеров, блок измерения температуры, блок передачи информации потребителям, не менее одного источника бесперебойного питания и блок встроенного контроля работоспособности системы и ее элементов, причем все упомянутые блоки подключены к шинам передачи данных, шинам управления и шинам питания. Технический результат заключается в повышении достоверности предупреждений населения о возможности наступления аварийных, чрезвычайных ситуаций в зданиях/сооружениях и их предотвращении за счет своевременного выявления, оповещения и реагирования.
Недостатки:
1) В составе системы требуется использование одного или нескольких блоков нагружения, возбуждающих колебания на определенной заданной частоте. Такое требование, хотя и направлено на компенсацию явления «размытости» спектра частот в окрестности частоты основного тона или обертонов, но его реализация не позволяет проводить непрерывный дистанционный мониторинг по причине негативного влияния на повседневную эксплуатацию зданий и сооружений. Также ясно, что частота основного тона и, тем более, частоты обертонов не всегда точно известны, поэтому возможное ошибочное задание частоты вынужденных колебаний в блоке нагружения может привести к искажению результатов, которые фиксируются в паспорте здания и по которым принимается решение о его техническом состоянии.
2) В составе системы предполагается наличие блока определения собственных частот. Однако, не упоминается о том, что спектр частот в окрестности частоты основного тона и наиболее значимых обертонов имеет «размытый» характер, что требует для выделения истинной частоты применения средств, в основе реализации которых положены физико-статистические методы аппроксимации «размытой» области с целью выделения близкой к искомой частоты и оценки точности ее определения. Кроме того, устройства или блоки обработки должны предусматривать процедуру исключения мешающего фактора - ускорения силы притяжения Земли, значительно искажающего амплитудочастотную характеристику спектра частот.
3) В способе отсутствуют критерии определения критических точек для размещения датчиков и блоков нагружения.
Известен способ и система определения устойчивости зданий и сооружений (патент РФ на изобретение №2245531, МПК G01M 7/00, 27.01.2005), используемые для определения устойчивости объектов (зданий и сооружений), при этом система для определения устойчивости зданий и сооружений содержит блок ударного устройства, блок формирования электрического синхроимпульса, блок преобразования колебаний в электрический сигнал, блок аналого-цифрового преобразования электрического сигнала, блок цифрового запоминающего устройства и блок управления цифровым запоминающим устройством, блок ввода экспериментальных и/или расчетных значений поверхностной прочности, и/или объемной прочности, и/или параметров армирования элементов конструкции объекта, и/или осадков, и/или сдвигов, и/или кренов объекта, и/или глубины залегания фундамента, и/или его поверхностной прочности, и/или его объемной прочности, и/или периода собственных колебаний грунта под объектом, и/или вокруг него, измеренного, по меньшей мере, по первому тону колебаний и/или уровня грунтовых вод, блок сравнения экспериментальных данных с нормированными данными, рассчитанными для данных конструкций и материалов испытуемого объекта и состава грунта под ним и/или вокруг него и блок воспроизведения полученных данных, связанные по шинам управления и данных между собой и с остальными функциональными блоками системы.
Способ также предусматривает изначально принудительное возбуждение колебаний здания при помощи устройств нагружения. В нем перечисляются динамические характеристики собственных колебаний здания, в том числе и собственные частоты, и говорится, что данные характеристики определяются путем экспертного оценивания.
Дополнительно к этому недостатку, необходимо указать следующие:
1) Частоты собственных колебаний по результатам измерений оцениваются не алгоритмически в автоматизированном режиме, а вручную методом экспертного оценивания. Это может привести к ошибочному определению частоты, так как разложение Фурье аддитивно, и в случае совпадения случайной ошибки по знаку с полезным сигналом (вероятность данного события - 0,5), амплитуда полезного сигнала увеличивается на величину, которая может достигать 3σ, а частота собственных колебаний оценивается уже по ошибочному пику.
2) Способ не обеспечивает оценки погрешности определяемых частот собственных колебаний (в предлагаемом нами способе наряду с частотой оценивается и среднеквадратическая ошибка ее определения). Неучет погрешности определения частоты собственных колебаний на этапе принятия решения о состоянии объекта может привести к ошибочному решению.
Известен способ мониторинга машин и сооружений, принимаемый за прототип нашего способа (патент РФ на изобретение №2371691, МПК G01M 7/02, G01M 15/00, 22.04.2008), включающий измерение посредством, по крайней мере, одного датчика параметров вибрации объекта, определение и анализ значений параметров вибрации объекта мониторинга в месте установки датчика, для чего используют датчик, синфазно измеряющий три ортогональных проекции вектора ускорения, определяют вектор деформации объекта мониторинга в месте установки датчика, накапливают массив векторных величин деформации, отображают на мониторе, по крайней мере, для одной частоты вибрации годограф вектора деформации относительно системы координат, связанной с объектом мониторинга, и определяют наличие анизотропии в деформациях элемента объекта мониторинга в месте установки датчика. Накапливают массив векторных величин деформации в выбранном диапазоне спектра частот вибрации объекта мониторинга и отображают на мониторе пространственное распределение массива векторных величин деформации, а наличие анизотропии определяют, отображая на мониторе годографы вектора деформации для нескольких выбранных частот вибрации. Дополнительно определяют величину анизотропии в виде значения отношения осей эллипсоида годографа вектора деформации. Для измерения параметров вибрации используют более одного датчика виброускорения, синфазно измеряющего три ортогональных проекции вектора ускорения, по данным каждого датчика определяют вектор деформации соответствующего элемента объекта, накапливают массив векторных величин деформации, отображают на мониторе, по крайней мере, для одной частоты вибрации годографы векторов деформации относительно системы координат, связанной с объектом мониторинга, и определяют наличие анизотропии в деформациях элементов объекта, при этом дополнительно на экране монитора отображают распределение механической анизотропии на объекте мониторинга.
Как и все способы, представленные ранее, этот способ мониторинга предполагает в своем составе определение динамических характеристик собственных колебаний зданий и сооружений (в том числе и частот собственных колебаний). Однако, конкретного алгоритма определения собственных частот в описании не представлено. Предположительно авторы ограничиваются либо алгоритмическим поиском максимума амплитудочастотной характеристики колебаний, полученной в результате разложения Фурье зарегистрированных измерений линейных ускорений, либо визуально определяют собственные частоты. Причем, об исключении проекций вектора силы тяжести для выделения из измерений линейных ускорений полезного сигнала, содержащего информацию именно о колебаниях здания, не упоминается вообще. Пренебрежение таким действием - грубейшая ошибка, которая приводит к значительному искажению амплитудочастотной характеристики колебаний, полученной в результате разложения Фурье зарегистрированных измерений линейных ускорений. Недостаточная точность способа требует необходимости многократного повторения экспериментов для накопления массива данных, не являющихся элементарными, значительных вычислительных и временных ресурсов, что снижает оперативность способа и усложняет техническую реализацию системы мониторинга особенно для крупных объектов, оснащенных большим числом первичных измерительных датчиков.
В нашем изобретении предполагается компенсация недостатков указанных способов реализацией средств, позволяющих:
1) Исключить мешающее влияние проекций ускорения вектора силы тяжести, содержащихся в измеренных проекциях линейного ускорения на оси измерительного датчика. Это позволит анализировать «чистые» зарегистрированные виброграммы, по которым строятся амплитудочастотные характеристики, из которых затем находятся собственные частоты.
2) Применить физико-статистическую обработку, для аппроксимации амплитудочастотных характеристик колебаний зданий и сооружений. Полученные аппроксимирующие модели позволяют с высокой степенью достоверности идентифицировать «пики», представляющие частоту основного тона и наиболее значимые обертоны собственных колебаний зданий и сооружений. С использованием аппроксимирующих моделей также становится возможным вычислить оценки среднеквадратических погрешностей определяемых собственных частот. Без знания оценок погрешностей определения частот осуществление надежного прогнозирования динамических характеристик здания является невозможным.
Техническим результатом изобретения является повышение точности и оперативности экспериментального определения характеристик собственных колебаний эксплуатируемых зданий и сооружений при исследовании их прочности в процессе мониторинга.
Указанный технический результат достигается в способе мониторинга зданий и сооружений, включающем измерение посредством, по крайней мере, одним датчиком параметров вибрации объекта, синфазно измеряющим три ортогональные проекции вектора ускорения, тем, что предварительно устанавливают датчик на элемент строительной конструкции здания или сооружения ориентируя три его ортогональные измерительные оси в направлении главных осей симметрии здания или сооружения, одна из которых вертикальная, регистрируют измеренные проекции линейного ускорения микроколебаний под воздействием микросейсмического фона естественного и техногенного происхождения на ортогональные измерительные оси датчика, центрируют измеренные проекции линейного ускорения, выделяя полезный сигнал вычитанием из измеренного сигнала проекций вектора силы тяжести g на три ортогональные измерительные оси датчика, вычисляют амплитудочастотные характеристики проекций линейного ускорения по трем ортогональным осям с использованием прямого преобразования Фурье для зарегистрированного сеанса измерений, производят сглаживание сплайновой моделью амплитудочастотных характеристик проекций линейного ускорения по трем ортогональным осям, определяют визуально точки перегиба реализаций сглаживающих функций, аппроксимирующих амплитудочастотные характеристики проекций линейного ускорения по трем ортогональным осям, и соответствующих им амплитуд и частот измеряемого сигнала, производят ранжирование полученных оценок частот сигнала в порядке убывания их амплитуд, при этом принимают, что частота, которой соответствует наибольшая амплитуда, является частотой основного тона собственных колебаний здания или сооружения, а остальные частоты являются обертонами сигнала, нумерацию которых осуществляют в порядке убывания соответствующих им амплитуд, находят среднеквадратические оценки определяемых частот по точкам пересечения прямой, параллельной горизонтальной оси отсчета частот измеряемого сигнала, проходящей через локальный максимум по амплитуде, соответствующий частоте анализируемого тона собственных колебаний здания или сооружения, со сглаживающей моделью, представляющей совокупность числовых оценок амплитуд, увеличенных на величину среднеквадратической ошибки их оценивания, с последующим проецированием данных точек на ось отсчета частот измеряемого сигнала.
Предлагаемый способ поясняется чертежами.
На фиг. 1 представлена схема размещения и ориентации датчика (трехосного акселерометра) на здании или сооружении в изометрии, где обозначены: 1 - датчик;
Ζ - вертикальная ось здания;
Y - малая ось здания;
X - большая ось здания;
О - геометрический центр здания;
Ζ1, Υ1, Χ1 - измерительные оси датчика.
На фиг. 2 представлено сечение здания вертикальной плоскостью симметрии вдоль малой оси.
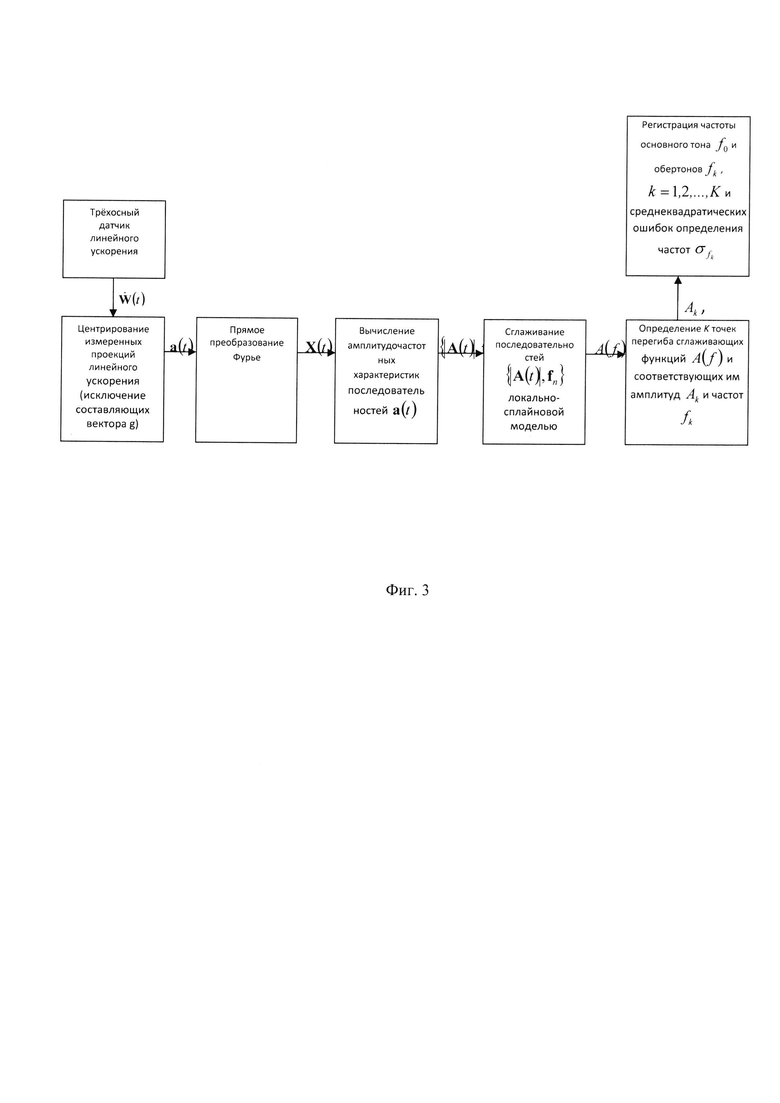
На фиг. 3 показана примерная блочно - модульная схема аппаратных средств, реализующих способ.
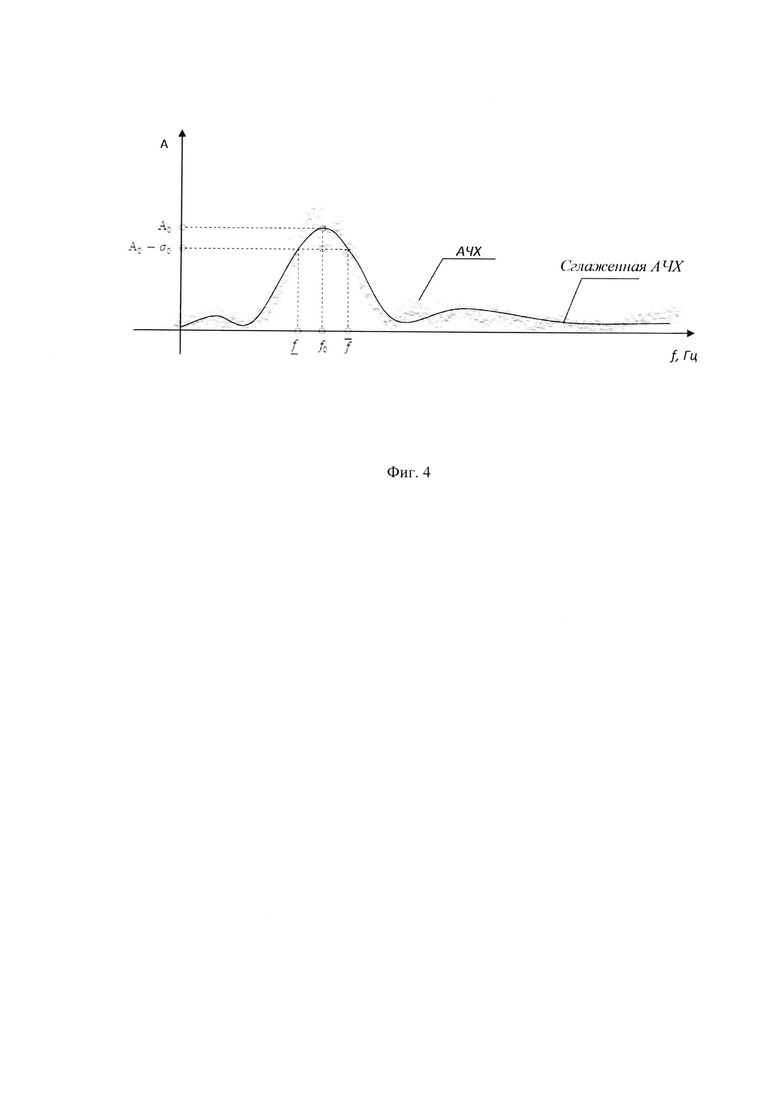
На фиг. 4 показана амплитудочастотная характеристика колебаний здания или сооружения в точке установки датчика с функцией, сглаженной локально-сплайновой моделью.
Способ мониторинга зданий и сооружений основывается на применении в составе автоматизированных систем средств, позволяющих выделять частоты собственных колебаний в «размытом» спектре частот, полученном по результатам измерений проекций линейного ускорения на три ортогональные оси инерциального цифрового измерительного датчика 1 (трехосного акселерометра), установленного на элементе строительной конструкции здания или сооружения. При этом полагается, что «размытость» экспериментального спектра частот в окрестности собственных частот обусловлена как характером вынужденных колебаний зданий и сооружений в условиях штатных микросейсмических, техногенных и атмосферных воздействий, так и погрешностями измерений проекций линейного ускорения, являющимися исходными данными для построения спектра. Кроме того, особенностью применяемых средств является учет характера искажения экспериментального спектра частот составляющими вектора силы тяжести, содержащимися в результатах измерений проекций линейного ускорения на три ортогональные оси инерциального цифрового измерительного датчика 1 (трехосного акселерометра).
Применение блоков нагружения для возбуждения колебаний здания в данном способе не требуется, так как сами действия по возбуждению вынужденных колебаний, позволяющие реализовать способы мониторинга, в которых не предусмотрена процедура выделения собственных частот в «размытом» спектре, нарушают режим повседневной эксплуатации здания и не позволяют организовать непрерывный дистанционный мониторинг с произвольной периодичностью. Хотя положительный эффект нагружения позволяет частично компенсировать «размытость» спектра частот в окрестности частоты основного тона и наиболее значимых обертонов, если частота нагружения выбрана правильно, а также в случае применения нагружения здания требования по точности первичных измерительных датчиков (трехосных акселерометров) могут быть снижены.
Существо способа экспериментального оценивания частот собственных колебаний в автоматизированных системах мониторинга зданий и сооружений состоит в выделении локальных максимумов сглаживающих функций, аппроксимирующих амплитудочастотные характеристики зарегистрированных измеренных проекций линейного ускорения на три ортогональные оси инерциального цифрового измерительного датчика (трехосного акселерометра), установленного и соответствующим образом ориентированного на элементе строительной конструкции (фиг. 1, 2), и последующего их ранжирования в порядке убывания амплитуд с целью установления соответствия основному тону и обертонам собственных колебаний зданий и сооружений. При этом из первичных измерений до построения амплитудочастотных характеристик применяемыми средствами исключаются составляющие вектора силы тяжести. Также одновременно по измеренным значениям проекций линейного ускорения определяются оценки среднеквадратических ошибок оценивания частот собственных колебаний.
Способ реализуется посредством аппаратных средств блочно-модульного типа, объединенных в единую структуру, реализующую последовательность действий, представленных на фиг. 3.
Способ повышает точность и оперативность определения характеристик собственных колебаний эксплуатируемых зданий и сооружений за счет обеспечения экспериментального оценивания частот собственных колебаний в автоматизированных системах мониторинга зданий и сооружений реализацией следующей последовательности действий:
- размещение на элементе строительной конструкции датчика 1 (трехосного акселерометра) с ориентацией трех его ортогональных измерительных осей в направлении главных осей симметрии здания или сооружения, одна из которых вертикальная (см. фиг. 1);
- регистрация измерений проекций линейного ускорения на три ортогональные оси датчика (трехосного акселерометра);
- центрирование измеренных проекций линейного ускорения (исключение составляющих вектора силы тяжести);
- вычисление амплитудочастотных характеристик проекций линейного ускорения по трем ортогональным осям (методом прямого преобразования Фурье) для зарегистрированного сеанса измерений;
- сглаживание сплайновой моделью амплитудочастотных характеристик проекций линейного ускорения по трем ортогональным осям;
- определение точек перегиба реализаций сглаживающих функций, аппроксимирующих амплитудочастотные характеристик проекций линейного ускорения по трем ортогональным осям, и соответствующих им амплитуд и частот измеряемого сигнала.
- ранжирование полученных оценок частот сигнала в порядке убывания их амплитуд, при этом принимается, что частота, которой соответствует наибольшая амплитуда, является частотой основного тона собственных колебаний здания или сооружения, а остальные частоты являются обертонами сигнала, нумерация которых осуществляется в порядке убывания соответствующих им амплитуд.
- среднеквадратические оценки определяемых частот находятся по точкам пересечения прямой, параллельной горизонтальной оси отсчета частот измеряемого сигнала, проходящей через локальный максимум по амплитуде, соответствующий частоте анализируемого тона собственных колебаний, со сглаживающей моделью, представляющей совокупность числовых оценок амплитуд, увеличенных на величину среднеквадратической ошибки их оценивания, с последующим проецированием данных точек на ось отсчета частот измеряемого сигнала.
Конкретная реализация последовательности действий процесса измерений заключается в следующем:
1) Действие по регистрации измерений  ,
,  ,
,  на интервале [t0,tk] каждым датчиком, установленным в назначенной
на интервале [t0,tk] каждым датчиком, установленным в назначенной  точке размещения на объекте (
точке размещения на объекте ( ). Дальнейшее рассмотрение проводится для одной точки установки датчика. Вопросы обобщения динамических характеристик собственных колебаний для определения их соответствующих значений, относящихся к зданию или его конструктивному элементу в целом, выходят за рамки описания способа и здесь не рассматриваются.
). Дальнейшее рассмотрение проводится для одной точки установки датчика. Вопросы обобщения динамических характеристик собственных колебаний для определения их соответствующих значений, относящихся к зданию или его конструктивному элементу в целом, выходят за рамки описания способа и здесь не рассматриваются.
2) Действия исключения составляющих вектора силы тяжести (центрирование измерений , , ) имеет своей целью выделение полезного сигнала ах, ay, az, содержащего информацию о собственных колебаниях объекта под воздействием возмущений геофизического и техногенного характера (или динамической нагрузки), из измерений , , на интервале [t0, tk]:

Необходимость действий (1) обусловлена тем, что данные измерений , , датчика, установленного на условно неподвижном основании содержат проекции вектора силы тяжести g на три ортогональные оси, параллельные большой, малой и вертикальной осям здания (см. фиг. 1).
3) Действие построения амплитудочастотных характеристик колебаний здания или сооружения в точке установки датчика реализуется следующим образом.
Построение Фурье-образов последовательностей ах, ay, az для каждой точки установки датчика:

где xn=⎣ax ау az⎦.
В формуле (2) положено, что дискретным отсчетам зарегистрированных данных по времени t на интервале [t0,tk] соответствуют индексы 
Построение амплитудочастотных (АЧХ)  последовательностей ах, ау, az.
последовательностей ах, ау, az.

Определение технических частот:

Идентификатор t текущего дискретного отсчета времени в формуле (3) эквивалентен номеру отсчета.
4) Действие сглаживания последовательностей локально-сплайновой моделью:

существующей на ограниченном интервале частот  , в которой xj - коэффициенты, а базисные функции
, в которой xj - коэффициенты, а базисные функции  которой определяются в соответствии с [1].
которой определяются в соответствии с [1].
Коэффициенты многочлена xj определяются из уравнения  методом наименьших квадратов в соответствии с [2]. В данном уравнении обозначены:
методом наименьших квадратов в соответствии с [2]. В данном уравнении обозначены:
Реализации точечных оценок неизвестных коэффициентов многочлена  :
:

Описание матриц, входящих в выражение (6), представлено в [2, 3].
Ковариационная матрица оценок коэффициентов сглаживающего многочлена вычисляется по следующей формуле:

С использованием выражения (7) вычисляется ковариационная матрица оценок сглаженных амплитуд последовательностей хn:

5) Определение всех имеющихся К (k=1,2,…,К, К<<N) точек перегиба реализаций сглаживающих функций, аппроксимирующих амплитудочастотные характеристик проекций линейного ускорения по трем ортогональным осям датчика, и соответствующих им амплитуд Ak и частот  с использованием необходимого условия экстремума сглаживающей функции (5) в точке:
с использованием необходимого условия экстремума сглаживающей функции (5) в точке:
и критерия изменения знака производной с плюса на минус:

6) Ранжирование полученных оценок частот в порядке убывания их амплитуд, по результатам которого в качестве частоты основного тона  зданий или сооружений
зданий или сооружений
принимается ближайшая к нулевой частота, которой соответствует максимальная амплитуда колебаний  . Частоты обертонов
. Частоты обертонов  зданий или сооружений расположены правее от нее на числовой оси частот в порядке убывания амплитуд.
зданий или сооружений расположены правее от нее на числовой оси частот в порядке убывания амплитуд.
7) Среднеквадратические оценки определяемых частот находятся по вариации АЧХ  в точках максимума
в точках максимума  , соответствующих частотам
, соответствующих частотам  ,
,  (см. фиг. 3). Оценки среднеквадратических ошибок
(см. фиг. 3). Оценки среднеквадратических ошибок  сглаженных амплитуд
сглаженных амплитуд  определяются как корни квадратные из диагональных элементов матрицы
определяются как корни квадратные из диагональных элементов матрицы  , вычисляемой по формуле (8).
, вычисляемой по формуле (8).
Оценка среднеквадратической ошибки собственной частоты зданий или сооружений (см. фиг. 4) определяется по формуле:

Таким образом, достигается технический результат изобретения, которым является повышение точности и оперативности экспериментального определения характеристик собственных колебаний эксплуатируемых зданий и сооружений при исследовании их прочности в процессе мониторинга.
Список использованных источников
1. Сухорученков Б.И., Меньшиков В.А. Методы анализа характеристик летательных аппаратов. - М.: Машиностроение, 1995. - 368 с.
2. Бетанов В.В., Лысенко И.В. Оценивание характеристик технических систем в условиях неоднозначной вероятностной формализации экспериментальных и априорных данных /Изв. РАН, «Теория и системы управления», №3, 2001.
3. Лоусон Ч., Хенсон Р. Численное решение задач метода наименьших квадратов / Пер. с англ. М.: Мир, 1986. - 232 с.
Изобретение относится к области оперативного дистанционного мониторинга зданий и сооружений при исследовании их прочностных свойств в условиях вибрационного воздействия естественного и техногенного происхождения. Сущность технического решения заключается в способе мониторинга зданий и сооружений, включающем измерение посредством, по крайней мере, одним датчиком параметров вибрации объекта, синфазно измеряющим три ортогональные проекции вектора ускорения, и состоит в том, что предварительно устанавливают датчик на элемент строительной конструкции здания или сооружения, ориентируя три его ортогональные измерительные оси в направлении главных осей симметрии здания или сооружения, одна из которых вертикальная, регистрируют измеренные проекции линейного ускорения микроколебаний под воздействием микросейсмического фона естественного и техногенного происхождения на ортогональные измерительные оси датчика, центрируют измеренные проекции линейного ускорения, выделяя полезный сигнал вычитанием из измеренного сигнала проекций вектора силы тяжести g на три ортогональные измерительные оси датчика, вычисляют амплитудочастотные характеристики проекций линейного ускорения по трем ортогональным осям с использованием прямого преобразования Фурье для зарегистрированного сеанса измерений, производят сглаживание сплайновой моделью амплитудочастотных характеристик проекций линейного ускорения по трем ортогональным осям, определяют визуально точки перегиба реализаций сглаживающих функций, аппроксимирующих амплитудочастотные характеристики проекций линейного ускорения по трем ортогональным осям, и соответствующих им амплитуд и частот измеряемого сигнала, производят ранжирование полученных оценок частот сигнала в порядке убывания их амплитуд, при этом принимают, что частота, которой соответствует наибольшая амплитуда, является частотой основного тона собственных колебаний здания или сооружения, а остальные частоты являются обертонами сигнала, нумерацию которых осуществляют в порядке убывания соответствующих им амплитуд, находят среднеквадратические оценки определяемых частот по точкам пересечения прямой, параллельной горизонтальной оси отсчета частот измеряемого сигнала, проходящей через локальный максимум по амплитуде, соответствующей частоте анализируемого тона собственных колебаний здания или сооружения, со сглаживающей моделью, представляющей совокупность числовых оценок амплитуд, увеличенных на величину среднеквадратической ошибки их оценивания, с последующим проецированием данных точек на ось отсчета частот измеряемого сигнала. Технический результат заключается в повышении точности и оперативности экспериментального определения характеристик собственных колебаний эксплуатируемых зданий и сооружений при исследовании их прочности в процессе мониторинга. 4 ил.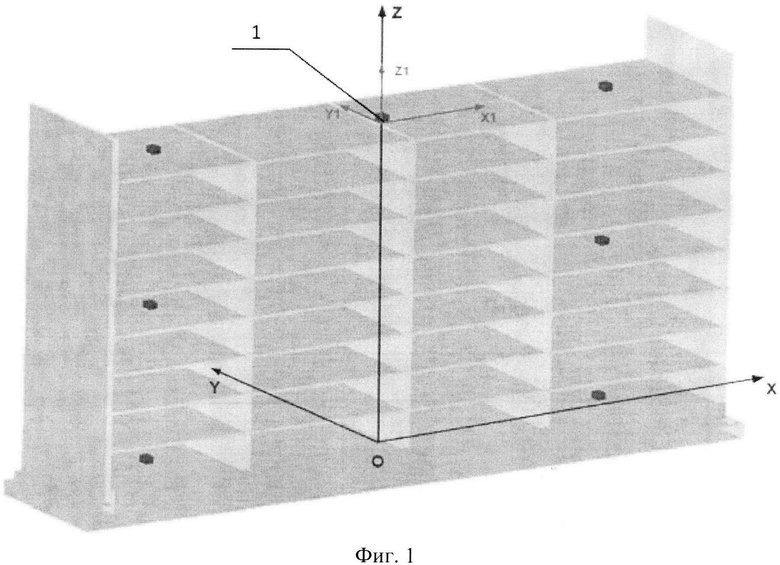
Способ мониторинга зданий и сооружений, включающий измерение посредством, по крайней мере, одним датчиком параметров вибрации объекта, синфазно измеряющим три ортогональные проекции вектора ускорения, отличающийся тем, что предварительно устанавливают датчик на элемент строительной конструкции здания или сооружения, ориентируя три его ортогональные измерительные оси в направлении главных осей симметрии здания или сооружения, одна из которых вертикальная, регистрируют измеренные проекции линейного ускорения микроколебаний под воздействием микросейсмического фона естественного и техногенного происхождения на ортогональные измерительные оси датчика, центрируют измеренные проекции линейного ускорения, выделяя полезный сигнал вычитанием из измеренного сигнала проекций вектора силы тяжести g на три ортогональные измерительные оси датчика, вычисляют амплитудочастотные характеристики проекций линейного ускорения по трем ортогональным осям с использованием прямого преобразования Фурье для зарегистрированного сеанса измерений, производят сглаживание сплайновой моделью амплитудочастотных характеристик проекций линейного ускорения по трем ортогональным осям, определяют визуально точки перегиба реализаций сглаживающих функций, аппроксимирующих амплитудочастотные характеристики проекций линейного ускорения по трем ортогональным осям, и соответствующих им амплитуд и частот измеряемого сигнала, производят ранжирование полученных оценок частот сигнала в порядке убывания их амплитуд, при этом принимают, что частота, которой соответствует наибольшая амплитуда, является частотой основного тона собственных колебаний здания или сооружения, а остальные частоты являются обертонами сигнала, нумерацию которых осуществляют в порядке убывания соответствующих им амплитуд, находят среднеквадратические оценки определяемых частот по точкам пересечения прямой, параллельной горизонтальной оси отсчета частот измеряемого сигнала, проходящей через локальный максимум по амплитуде, соответствующей частоте анализируемого тона собственных колебаний здания или сооружения, со сглаживающей моделью, представляющей совокупность числовых оценок амплитуд, увеличенных на величину среднеквадратической ошибки их оценивания, с последующим проецированием данных точек на ось отсчета частот измеряемого сигнала.
| СПОСОБ ПЛАНОВО-ПРЕДУПРЕДИТЕЛЬНОГО КОНТРОЛЯ ФИЗИЧЕСКОГО СОСТОЯНИЯ ЗДАНИЙ И СООРУЖЕНИЙ | 1999 |
|
RU2163009C2 |
| СПОСОБ МОНИТОРИНГА И ПРОГНОЗИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЗДАНИЙ И СООРУЖЕНИЙ И СИСТЕМА МОНИТОРИНГА И ПРОГНОЗИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЗДАНИЙ И СООРУЖЕНИЙ (ВАРИАНТЫ) | 2008 |
|
RU2381470C2 |
| СПОСОБ МОНИТОРИНГА БЕЗОПАСНОСТИ НЕСУЩИХ КОНСТРУКЦИЙ, КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ ЗДАНИЙ И СООРУЖЕНИЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413193C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСТОЙЧИВОСТИ ЗДАНИЙ И СООРУЖЕНИЙ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УСТОЙЧИВОСТИ ЗДАНИЙ И СООРУЖЕНИЙ | 2003 |
|
RU2245531C2 |
| WO 2001001124 A1, 04.01.2001. | |||

