ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет согласно предварительной заявке на патент США №61/753,173, поданной 16 января 2013; предварительной заявке на патент США №61/753,389, поданной 16 января 2013; предварительной заявке на патент США №61/807,476, поданной 2 апреля 2013; предварительной заявке на патент США №61/821,038, поданной 8 мая 2013; предварительной заявке на патент США №61/882,574, поданной 25 сентября 2013; предварительной заявке на патент США №61/897,738, поданной 30 октября 2013.
УРОВЕНЬ ТЕХНИКИ
[0002] Связь от устройства к устройству (D2D) может содействовать специфическим коммерческим и социальным прикладным задачам, разгрузке сети и/или непосредственной связи общественной безопасности. Эти службы, основанные на близости, (ProSe) могут требовать процедур обнаружения и связи D2D.
[0003] Некоторые беспроводные технологии, например, Wi-Fi и/или Bluetooth могут обеспечивать возможность непосредственной связи между двумя устройствами. Однако такие технологии могут работать в свободных от лицензии полосах и могут подвергаться более высоким помехам и более низкому качеству обслуживания. Кроме того, с появлением мобильных технологий долгосрочного развития (LTE) и улучшенного стандарта долгосрочного развития (LTE-A), желательно обеспечить возможность сетевого управления связью D2D.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Описаны способы и устройства, ассоциированные с передачей сигналов от устройства к устройству (D2D) посредством беспроводного приемопередающего устройства, содержащие определение плана сигнала обнаружения, указывающего разрешенные субкадры для передачи сигнала обнаружения D2D, определение последовательности скремблирования, определение, передавать ли сигнал обнаружения D2D в одном или нескольких разрешенных субкадрах, и передачу сигнала обнаружения D2D с использованием последовательности скремблирования, при этом сигнал обнаружения D2D содержит полезную нагрузку и опорный символ.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Фиг. 1А - схема системы примерной системы связи.
[0006] Фиг. 1B - схема системы примерного беспроводного приемопередающего блока (WTRU), который может быть использован в системе связи, показанной на фиг. 1А.
[0007] Фиг. 1C - схема системы примерной сети радиодоступа и примерной базовой сети, которые могут быть использованы в системе связи, показанной на фиг. 1А.
[0008] Фиг. 1D - схема системы другой примерной сети радиодоступа и примерной базовой сети, которые могут быть использованы в системе связи, показанной на фиг. 1А.
[0009] Фиг. 1E - схема системы другой примерной сети радиодоступа и примерной базовой сети, которые могут быть использованы в системе связи, показанной на фиг. 1А.
[0010] Фиг. 2 иллюстрирует концептуальные примерные комбинации частей сигналов обнаружения (с TDM, FDM и комбинациями TDM и FDM).
[0011] Фиг. 3 иллюстрирует примерное отображение сигналов обнаружения на физические ресурсы в присутствии передач PUCCH на краю диапазона.
[0012] Фиг. 4 иллюстрирует пример опорных символов, отображаемых на символ OFDM.
[0013] Фиг. 5 иллюстрирует пример опорных символов, отображаемых на множественные символы OFDM.
[0014] Фиг. 6 иллюстрирует примерную структуру сигналов обнаружения.
[0015] Фиг. 7 иллюстрирует пример частотно/временного представления сигналов D2D LTE.
[0016] Фиг. 8 иллюстрирует пример многосигнального приемника.
[0017] Фиг. 9 иллюстрирует пример параллельной обработки для декодирования сигнала D2D LTE.
[0018] Фиг. 10 иллюстрирует пример многомодульных конфигураций, которые могут быть использованы в последовательной обработке.
[0019] Фиг. 11 иллюстрирует пример успешного подавления сигнальных помех, применяемого к D2D.
[0020] Фиг. 12 иллюстрирует пример многосигнального планирования, отображаемого на передатчики WTRU.
[0021] Фиг. 13 иллюстрирует примерную топологию, использующую мультиплексирование с временным разделением (TDM).
[0022] Фиг. 14 иллюстрирует примерную синхронизацию, относящуюся к примерной топологии по фиг. 13.
[0023] Фиг. 15 иллюстрирует примерную топологию, использующую мультиплексирование с частотным разделением (FDM).
[0024] Фиг. 16 иллюстрирует примерную синхронизацию, относящуюся к примерной топологии по фиг. 15.
[0025] Фиг. 17 иллюстрирует примерное задание размера циклического сдвига в случае примерных сигналов, мультиплексированных с кодовым разделением (CDM).
[0026] Фиг. 18 иллюстрирует примерный сигнал обнаружения с секцией избыточности.
[0027] Фиг. 19 иллюстрирует примерный сигнал обнаружения с защитным временным интервалом.
[0028] Фиг. 20 иллюстрирует примерный(е) радиокадр(ы) обнаружения.
[0029] Фиг. 21 иллюстрирует примерное выравнивание по времени радиокадров обнаружения.
[0030] Фиг. 22 иллюстрирует примерные область перекрытия и пустую область в субкадре(ах) обнаружения.
[0031] Фиг. 23 иллюстрирует примерные область перекрытия и пустую область в субкадре(ах) обнаружения.
ПОДРОБНОЕ ОПИСАНИЕ
[0032] В дальнейшем изобретение поясняется описанием иллюстративных вариантов осуществления со ссылками на сопровождающие чертежи. Хотя настоящее описание обеспечивает подробный пример возможных реализаций, следует отметить, что подробности являются примерными и никоим образом не ограничивают объем заявки.
[0033] Фиг. 1А - схема примерной системы 100 связи, в которой могут быть реализованы один или несколько раскрытых вариантов осуществления. Система 100 связи может представлять собой систему множественного доступа, которая обеспечивает контент, такой как голос, данные, видео, сообщения, вещание и т.п. многочисленным пользователям беспроводной связи. Система 100 связи может позволить многочисленным пользователям беспроводной связи получать доступ к такому контенту посредством совместного использования системных ресурсов, в том числе полосы пропускания беспроводной связи. Например, системы 100 связи могут использовать один или несколько способов доступа к каналу, такие как множественный доступ с кодовым разделением (CDMA), множественный доступ с временным разделением (TDMA), множественный доступ с частотным разделением (FDMA), ортогональный FDMA (OFDMA), FDMA с одной несущей (SC-FDMA) и т.п.
[0034] Как показано на фиг. 1А, система 100 связи может включать в себя беспроводные приемопередающие блоки (WTRU) 102a, 102b, 102c и/или 102d (которые в общем или совместно могут упоминаться как WTRU 102), сеть радиодоступа (RAN) 103/104/105, базовую сеть 106/107/109, коммутируемую телефонную сеть общего пользования (PSTN) 108, Интернет 110 и другие сети 112, хотя можно понять, что раскрытые варианты осуществления предполагают любое число WTRU, базовых станций, сетей и/или сетевых элементов. Каждый из WTRU 102a, 102b, 102c, 102d может быть устройством любого типа, сконфигурированным с возможностью работы и/или связи в беспроводной среде. Например, WTRU 102a, 102b, 102c, 102d могут быть сконфигурированы с возможностью передачи и/или приема беспроводных сигналов и могут включать в себя пользовательское оборудование (UE), мобильную станцию, стационарный или мобильный абонентский блок, пейджер, сотовый телефон, карманный компьютер (PDA), смартфон, переносной компьютер, нетбук, персональный компьютер, беспроводный датчик, бытовую электронику и т.п.
[0035] Система 100 связи также может включать в себя базовую станцию 114a и базовую станцию 114b. Каждая из базовых станций 114a, 114b может быть устройством любого типа, сконфигурированным с возможностью беспроводного взаимодействия с по меньшей мере одним из WTRU 102a, 102b, 102c, 102d для содействия доступу к одной или нескольким сетям связи, таким как базовая сеть 106/107/109, Интернет 110 и/или сети 112. Например, базовые станции 114a, 114b могут представлять собой базовую приемопередающую станцию (BTS), Node-B (узел B), eNode B (развитый узел B), домашний Node B, домашний eNode B, контроллер узла, точку доступа (AP), беспроводный маршрутизатор и т.п. Хотя каждая из базовых станций 114a, 114b изображена как единый элемент, должно быть понятно, что базовые станции 114a, 114b могут включать в себя любое число взаимосвязанных базовых станций и/или сетевых элементов.
[0036] Базовая станция 114a может быть частью RAN 103/104/105, которая также может включать в себя другие базовые станции и/или сетевые элементы (не показаны), такие как контроллер базовой станции (BSC), контроллер радиосети (RNC), ретрансляционные узлы и т.п. Базовая станция 114a и/или базовая станция 114b могут быть сконфигурированы с возможностью передачи и/или приема беспроводных сигналов в пределах некоторой конкретной географической области, которая может упоминаться как сота (не показана). Сота может дополнительно делиться на секторы соты. Например, сота, ассоциированная с базовой станцией 114a, может быть разделена на три сектора. Таким образом, в одном варианте осуществления, базовая станция 114a также может включать в себя три приемопередатчика, то есть, по одному на каждый сектор соты. В другом варианте осуществления, базовая станция 114a может использовать технологию множественного входа/множественного выхода (MIMO) и, следовательно, может использовать множество приемопередатчиков для каждого сектора соты.
[0037] Базовые станции 114a, 114b могут осуществлять связь с одним или несколькими WTRU 102a, 102b, 102c, 102d по радиоинтерфейсу 115/116/117, который может представлять собой любую подходящую беспроводную линию связи (например, радиочастотную (RF), микроволновую, инфракрасную (IR), ультрафиолетовую (UV), видимого света и т.п.). Радиоинтерфейс 115/116/117 может устанавливаться с использованием любой подходящей технологии радиодоступа (RAT).
[0038] Более конкретно, как отмечалось выше, система 100 связи может быть системой множественного доступа и может использовать одну или несколько схем доступа к каналу, как например, CDMA, TDMA, FDMA, OFDMA, SC-FDMA и т.п. Например, базовая станция 114a в RAN 103/104/105 и WTRU 102а, 102b, 102с могут реализовывать технологию радиосвязи, такую как Наземный радиодоступ Универсальной мобильной телекоммуникационной системы (UMTS)(UTRA), который может устанавливать радиоинтерфейс 115/116/117 с использованием широкополосного CDMA (WCDMA). WCDMA может включать в себя протоколы связи, такие как высокоскоростной пакетный доступ (HSPA) и/или развитый HSPA (HSPA+). HSPA может включать в себя высокоскоростной пакетный доступ нисходящей линии связи (HSDPA) и/или высокоскоростной пакетный доступ восходящей линии связи (HSUPA).
[0039] В другом варианте осуществления базовая станция 114a и WTRU 102a, 102b, 102c могут реализовывать такую технологию радиосвязи, как Наземный радиодоступ Развитой UMTS (E-UTRA), который может устанавливать радиоинтерфейс 115/116/117 с использованием стандарта долгосрочного развития (LTE) и/или улучшенного LTE (LTE-A).
[0040] В других вариантах осуществления, базовая станция 114a и WTRU 102a, 102b, 102c могут реализовывать такие технологии радиосвязи, как IEEE 802.16 (то есть, Глобальная функциональная совместимость для микроволнового доступа (WiMAX)), CDMA2000, CDMA2000 1X, CDMA2000 EV-DO, Временный стандарт 2000 (IS-2000), Временный стандарт 95 (IS-95), Временный стандарт 856 (IS-856), Глобальная система мобильной связи (GSM), Улучшенные скорости передачи данных для развития GSM (EDGE), GSM EDGE (GERAN) и т.п.
[0041] Базовая станция 114b на фиг. 1 может представлять собой, например, беспроводный маршрутизатор, домашний Node B, домашний eNode B или точку доступа и может использовать любую подходящую RAT для содействия беспроводной связности в локальной области, такой как коммерческое предприятие, дом, транспортное средство, университетский городок и т.п. В одном варианте осуществления базовая станция 114b и WTRU 102c, 102d могут реализовывать такую технологию радиосвязи, как IEEE 802.11 для создания беспроводной локальной сети (WLAN). В другом варианте осуществления базовая станция 114b и WTRU 102c, 102d могут реализовывать такую технологию радиосвязи, как IEEE 802.15 для создания беспроводной персональной сети (WPAN). Еще в одном варианте осуществления базовая станция 114b и WTRU 102c, 102d могут использовать сотовую RAT (например, WCDMA, CDMA2000, GSM, LTE, LTE-A и т.п.) для создания пикосоты или фемтосоты. Как показано на фиг. 1А, базовая станция 114b может иметь прямое соединение с Интернетом 110. Таким образом, базовая станция 114b не обязательно должна получать доступ к Интернету 110 через базовую сеть 106/107/109.
[0042] Сеть RAN 103/104/105 может осуществлять связь с базовой сетью 106/107/109, которая может быть сетью любого типа, сконфигурированной для предоставления голоса, данных, приложений и/или служб передачи голоса по Интернет-протоколу (VoIP) одному или нескольким WTRU 102a, 102b, 102c, 102d. Например, базовая сеть 106/107/109 может обеспечивать управление вызовами, услуги тарификации, услуги, основанные на определении мобильного местоположения, вызовы по предоплате, соединение с Интернетом, распространение видео и т.п. и/или может выполнять функции безопасности высокого уровня, такие как аутентификация пользователя. Хотя и не показано на фиг. 1А, но должно быть понятно, что RAN 103/104/105 и/или базовая сеть 106/107/109 могут осуществлять прямую или опосредованную связь с другими RAN, которые используют ту же RAT, что и RAN 103/104/105, или другую RAT. Например, в дополнение к соединению с RAN 103/104/105, которая может использовать технологию радиосвязи E-UTRA, базовая сеть 106/107/109 также может осуществлять связь с другой RAN (не показана), использующей технологию радиосвязи GSM.
[0043] Базовая сеть 106/107/109 также может служить шлюзом для WTRU 102a, 102b, 102c, 102d для доступа к PSTN 108, Интернету 110 и/или к другим сетям 112. PSTN 108 может включать в себя телефонные сети с коммутацией каналов, которые обеспечивают простую старую телефонную службу (POTS). Интернет 110 может включать в себя глобальную систему взаимосвязанных компьютерных сетей и устройств, которые используют общие протоколы связи, такие как протокол управления передачей (TCP), протокол пользовательских дейтаграмм (UDP) и Интернет-протокол (IP) в наборе Интернет-протоколов TCP/IP. Сети 112 могут включать в себя проводные и беспроводные сети связи, которыми владеют и/или управляют другие поставщики услуг. Например, сети 112 могут включать в себя другую базовую сеть, соединенную с одной или несколькими RAN, которые могут использовать ту же RAT, что и RAN 103/104/105, или другую RAT.
[0044] Один или несколько или все из WTRU 102a, 102b, 102c, 102d в системе 100 связи могут включать в себя многорежимные функциональные возможности, то есть, WTRU 102a, 102b, 102c, 102d могут включать в себя множество приемопередатчиков для связи с различными беспроводными сетями по различным беспроводным линиям связи. Например, WTRU 102c, показанный на фиг. 1А, может быть сконфигурирован для связи с базовой станцией 114a, которая может использовать технологию сотовой радиосвязи, и с базовой станцией 114b, которая может использовать технологию радиосвязи IEEE 802.
[0045] Фиг. 1B является схемой системы примерного беспроводного приемопередающего устройства (WTRU) 102. Как показано на фиг. 1B, WTRU 102 может включать в себя процессор 118, приемопередатчик 120, приемопередающий элемент 122, динамик/микрофон 124, клавиатуру 126, устройство отображения/сенсорную панель 128, несъемную память 130, съемную память 132, источник питания 134, набор микросхем 136 глобальной системы позиционирования (GPS) и другие периферийные устройства 138. Должно быть понятно, что WTRU 102 может включать в себя любую подкомбинацию вышеупомянутых элементов, при этом оставаясь в рамках варианта осуществления. Также, варианты осуществления предполагают, что базовые станции 114a и 114b и/или узлы, которые могут представлять, без ограничения указанным, базовые станции 114a и 114b, такие как приемопередающая станция (BTS), Node-B, контроллер узла, точка доступа (AP), домашний node-B, развитый домашний node-B (eNodeB), домашний развитый node-B (HeNB), шлюз домашнего развитого node-B и посреднические (прокси) узлы, в числе прочего, могут включать в себя один или более или все из элементов, показанных на фиг. 1B и описанных здесь.
[0046] Процессор 118 может представлять собой процессор общего назначения, процессор специального назначения, обычный процессор, процессор цифровых сигналов (DSP), множество микропроцессоров, один или несколько микропроцессоров в ассоциации с ядром DSP, контроллер, микроконтроллер, специализированные интегральные схемы (ASIC), схемы на программируемых вентильных матрицах (FPGA) или другой тип интегральной схемы (IC), конечный автомат и т.п. Процессор 118 может выполнять кодирование сигналов, обработку данных, управление мощностью, обработку ввода/вывода и/или любую другую функциональность, которая позволяет WTRU 102 работать в беспроводной среде. Процессор 118 может быть связан с приемопередатчиком 120, который может быть связан с приемопередающим элементом 122. Хотя фиг. 1B изображает процессор 118 и приемопередатчик 120 как отдельные компоненты, должно быть понятно, что процессор 118 и приемопередатчик 120 могут быть объединены друг с другом в упаковку электронных схем или микросхему.
[0047] Приемопередающий элемент 122 может быть сконфигурирован для передачи сигналов в базовую станцию или для приема сигналов от базовой станции (например, базовой станции 114a) по радиоинтерфейсу 115/116/117. Например, в одном варианте осуществления приемопередающий элемент 122 может представлять собой антенну, сконфигурированную для передачи и/или приема RF сигналов. В другом варианте осуществления приемопередающий элемент 122 может представлять собой излучатель/детектор, сконфигурированный для передачи и/или приема, например, IR, UV сигналов или сигналов видимого света. Еще в одном варианте осуществления приемопередающий элемент 122 может быть сконфигурирован для передачи и/или приема как RF, так и световых сигналов. Должно быть понятно, что приемопередающий элемент 122 может быть сконфигурирован для передачи и/или приема любой комбинации беспроводных сигналов.
[0048] Кроме того, хотя приемопередающий элемент 122 изображен на фиг. 1B в виде одного элемента, WTRU 102 может включать в себя любое число приемопередающих элементов 122. Более конкретно, WTRU 102 может использовать технологию MIMO. Таким образом, в одном варианте осуществления, WTRU 102 может включать в себя два или более приемопередающих элементов 122 (например, множество антенн) для передачи и приема беспроводных сигналов через радиоинтерфейс 115/116/117.
[0049] Приемопередатчик 120 может быть сконфигурирован для модуляции сигналов, которые должны передаваться приемопередающим элементом 122, и для демодуляции сигналов, которые принимаются приемопередающим элементом 122. Как упоминалось выше, WTRU 102 может иметь многорежимные функциональные возможности. Таким образом, WTRU 102 может включать в себя множество приемопередатчиков для обеспечения возможности WTRU 102 осуществлять связь посредством множества RAT, таких как, например, UTRA и IEEE 802.11.
[0050] Процессор 118 WTRU 102 может быть подсоединен к динамику/микрофону 124, клавиатуре 126 и/или устройству отображения/сенсорной панели 128 (например, блоку отображения на жидкокристаллическом дисплее (LCD) или блоку отображения на органических светоизлучающих диодах (OLED)) и принимать данные пользовательского ввода от них. Процессор 118 также может выводить пользовательские данные на динамик/микрофон 124, клавиатуру 126 и/или устройство отображения/сенсорную панель 128. Кроме того, процессор 118 может получать доступ к информации из подходящей памяти любого типа, такой как несъемная память 130 и/или съемная память 132, и сохранять данные в ней. Несъемная память 130 может включать в себя оперативную память (RAM), постоянную память (ROM), жесткий диск или устройство памяти другого типа. Съемная память 132 может включать в себя карту модуля идентификации абонента (SIM), карту памяти, карту формата Secure Digital (SD-карту) и т.п. В других вариантах осуществления процессор 118 может получать доступ к информации из памяти, которая физически не расположена в WTRU модуле 102, такой как находящаяся на сервере или домашнем компьютере (не показан), и сохранять данные в ней.
[0051] Процессор 118 может получать питание от источника 134 питания и может быть сконфигурирован для распределения и/или регулировки питания, подаваемого на другие компоненты WTRU 102. Источник 134 питания может представлять собой любое подходящее устройство для питания WTRU 102. Например, источник 134 питания может включать в себя одну или несколько батарей сухих элементов (например, никель-кадмиевых (NiCd), никель-цинковых (NiZn), никель-металлгидридных (NiMH), литий-ионных (Li-ion) и т.п.), солнечные элементы, топливные элементы и т.п.
[0052] Процессор 118 также может быть связан с набором микросхем 136 GPS, который может быть сконфигурирован для обеспечения информации местоположения (например, по долготе и широте) касательно текущего местоположения WTRU 102. Кроме того, или вместо информации от набора микросхем 136 GPS, WTRU 102 может принимать информацию местоположения по радиоинтерфейсу 115/116/117 из базовой станции (например, базовых станций 114a, 114b) и/или определять свое местоположение основываясь на временных характеристиках (тайминге) сигналов, принимаемых от двух или более близлежащих базовых станций. Должно быть понятно, что WTRU 102 может получать информацию местоположения любым подходящим способом определения местоположения, при этом оставаясь в согласии с вариантом осуществления.
[0053] Процессор 118 может быть дополнительно связан с другими периферийными устройствами 138, которые могут включать в себя один или более модулей программного обеспечения и/или аппаратных средств, которые обеспечивают дополнительные особенности, функциональные возможности и/или проводную или беспроводную связность. Например, периферийные устройства 138 могут включать в себя акселерометр, е-компас, спутниковый приемопередатчик, цифровую камеру (для фотографий или видео), порт универсальной последовательной шины (USB), вибратор, телевизионный приемопередатчик, гарнитуру громкой связи, модуль Bluetooth®, модуль частотно-модулированного (FM) радио, цифровой аудиоплеер, медиаплеер, плеер видеоигр, Интернет-браузер и т.п.
[0054] Фиг. 1C показывает схему системы RAN 103 и базовой сети 106 согласно варианту осуществления. Как отмечалось выше, RAN 103 может использовать технологию радиосвязи UTRA для связи с WTRU 102a, 102b, 102c по радиоинтерфейсу 115. RAN 103 также может осуществлять связь с базовой сетью 106. Как показано на фиг. 1C, RAN 103 может включать в себя Node-B 140a, 140b, 140c, каждый из которых включает в себя один или более приемопередатчиков для связи с WTRU 102a, 102b, 102c по радиоинтерфейсу 115. Каждый из Node-B 140a, 140b, 140c может быть ассоциирован с конкретной сотой (не показана) в пределах RAN 103. RAN 103 также может включать в себя RNC 142a, 142b. Должно быть понятно, что RAN 103 может включать в себя любое число Node-B и RNC, при этом оставаясь согласующейся с вариантом осуществления.
[0055] Как показано на фиг. 1C, Node-B 140a, 140b могут осуществлять связь с RNC 142a. Кроме того, Node-B осуществлять связь с RNC 142b. Node-B 140a, 140b, 140c могут осуществлять связь с соответствующими RNC через Iub интерфейс. RNC 142a, 142b могут осуществлять связь друг с другом через Iur интерфейс. Каждый из RNC 142a, 142b может быть сконфигурирован для управления соответствующими Node-B 140a, 140b, 140c, с которым он соединен. Кроме того, каждый из RNC 142a, 142b может быть сконфигурирован для выполнения или поддержки других функциональных возможностей, таких как управление мощностью во внешнем контуре, управление нагрузкой, управление допуском, планирование пакетов, управление передачей обслуживания (хэндовером), макроразнесение, функции безопасности, шифрование данных и т.п.
[0056] Базовая сеть 106, показанная на фиг. 1C, может включать в себя медиа-шлюз (MGW) 144, центр коммутации мобильной связи (MSC) 146, обслуживающий узел поддержки GPRS (SGSN) 148 и/или шлюзовой узел поддержки GPRS (GGSN) 150. Хотя каждый из вышеупомянутых элементов изображен как часть базовой сети 106, должно быть понятно, что любой из этих элементов может находиться во владении и/или управляться объектом иным, чем оператор базовой сети.
[0057] RNC 142a в RAN 103 может быть соединен с MSC 146 в базовой сети 106 через IuCS интерфейс. MSC 146 может быть соединен с MGW 144. MSC 146 и MGW 144 могут предоставлять WTRU 102a, 102b, 102c доступ к сетям с коммутацией каналов, таким как PSTN 108, для содействия связи между WTRU 102a, 102b, 102c и традиционными устройствами наземных линий связи.
[0058] RNC 142a в RAN 103 также может быть соединен с SGSN 148 в базовой сети 106 через IuPS интерфейс. SGSN 148 может быть соединен с GGSN 150. SGSN 148 и GGSN 150 могут предоставлять WTRU 102a, 102b, 102c доступ к сетям с пакетной коммутацией, таким как Интернет 110, для содействия связи между WTRU 102a, 102b, 102c и IP-устройствами.
[0059] Как отмечалось выше, базовая сеть 112 также может быть соединена c сетями 112, которые могут включать в себя другие проводные и беспроводные сети связи, которыми владеют и/или управляют другие поставщики услуг.
[0060] Фиг. 1D показывает схему системы RAN 104 и базовой сети 107 согласно варианту осуществления. Как отмечалось выше, RAN 104 может использовать технологию радиосвязи E-UTRA для осуществления связи с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. RAN 104 также может осуществлять связь с базовой сетью 107.
[0061] RAN 104 может включать в себя eNode-B 160a, 160b, 160c, хотя должно быть понятно, что RAN 104 может включать в себя любое число eNode-B и RNC, при этом оставаясь согласующейся с вариантом осуществления. Каждый из eNode-B 160a, 160b, 160c может включать в себя один или более приемопередатчиков для осуществления связи с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. В одном варианте осуществления eNode-B 160a, 160b, 160c могут реализовать технологию MIMO. Таким образом, eNode-B 160a, например, может использовать множество антенн для передачи беспроводных сигналов к WTRU 102a и приема беспроводных сигналов от WTRU 102a.
[0062] Каждый из eNode-B 160a, 160b, 160c может быть ассоциирован с конкретной сотой (не показана) и может быть сконфигурирован для принятия решений о регулировании ресурсов радиосвязи, решений о передаче обслуживания, планировании пользователей в восходящей линии связи и/или нисходящей линии связи и т.п. Как показано на фиг. 1D, eNode-B 160a, 160b, 160c могут осуществлять связь друг с другом через Х2 интерфейс.
[0063] Базовая сеть 107, показанная на фиг. 1D, может включать в себя шлюз управления мобильностью (MME) 162, обслуживающий шлюз 164 и шлюз 166 сети пакетных данных (PDN). Хотя каждый из вышеупомянутых элементов изображен как часть базовой сети 107, должно быть понятно, что любой из этих элементов может находиться во владении и/или управляться объектом иным, чем оператор базовой сети.
[0064] MME 162 может быть соединен с каждым из eNode-B 160a, 160b, 160c в RAN 104 через S1 интерфейс и может служить узлом управления. Например, MME 162 может отвечать за аутентификацию пользователей WTRU 102a, 102b, 102c, активацию/деактивацию канала-носителя, выбор конкретного обслуживающего шлюза во время начального подключения WTRU 102a, 102b, 102c и т.п. MME 162 также может обеспечивать функцию плоскости управления для переключения между RAN 104 и другими RAN (не показаны), которые используют другие технологии радиосвязи, такие как GSM и WCDMA.
[0065] Обслуживающий шлюз 164 может быть соединен с каждым из eNode-B 160a, 160b, 160c в RAN 104 через S1 интерфейс. Обслуживающий шлюз 164 может в основном маршрутизировать и направлять пакеты пользовательских данных в/из WTRU 102a, 102b, 102c. Обслуживающий шлюз 164 также может выполнять другие функции, такие как привязка пользовательских плоскостей во время передач обслуживания между eNode B, запуск поискового вызова, когда имеются данные нисходящей линии связи для WTRU 102a, 102b, 102c, администрирование и сохранение контекстов WTRU 102a, 102b, 102c и т.п.
[0066] Обслуживающий шлюз 164 может быть соединен с шлюзом 166 PDN, который может предоставлять WTRU 102a, 102b, 102c доступ к сетям с пакетной коммутацией, таким как Интернет 110, для содействия связи между WTRU 102a, 102b, 102c и IP-устройствами.
[0067] Базовая сеть 107 может содействовать связи с другими сетями. Например, базовая сеть 107 может предоставить WTRU 102a, 102b, 102c доступ к сетям с коммутацией каналов, таким как PSTN 108, для содействия связи между WTRU 102a, 102b, 102c и традиционными устройствами связи наземных линий. Например, базовая сеть 107 может включать в себя, или может осуществлять связь с IP-шлюзом (например, сервером IP мультимедийной подсистемы (IMS)), который служит в качестве интерфейса между базовой сетью 107 и PSTN 108. Кроме того, базовая сеть 107 может предоставить WTRU 102a, 102b, 102c доступ к сетям 112, которые могут включать в себя другие проводные и беспроводные сети, которыми владеют и/или управляют другие поставщики услуг.
[0048] Фиг. 1E показывает схему системы RAN 105 и базовой сети 109 согласно варианту осуществления. RAN 105 может представлять собой сеть доступа к услугам (ASN), которая использует технологию радиосвязи IEEE 802.16 для осуществления связи с WTRU 102a, 102b, 102c по радиоинтерфейсу 117. Как будет поясняться подробно ниже, линии связи между различными функциональными объектами WTRU 102a, 102b, 102c, RAN 105 и базовой сети 109 могут быть определены как опорные точки.
[0069] Как показано на фиг. 1E, RAN 115 может включать в себя базовые станции 180a, 180b, 180c и шлюз 182 ASN, хотя должно быть понятно, что RAN 105 может включать в себя любое число базовых станций и шлюзов ASN, при этом оставаясь в соответствии с вариантом осуществления. Каждая из базовых станций 180a, 180b, 180c может быть ассоциирована с конкретной сотой (не показана) в RAN 103 и может включать в себя один или более приемопередатчиков для осуществления связи с WTRU 102a, 102b, 102c по радиоинтерфейсу 117. В одном варианте осуществления базовые станции 180a, 180b, 180c могут реализовать технологию MIMO. Таким образом, базовая станция 108, например, может использовать множество антенн для передачи беспроводных сигналов к WTRU 102a и приема беспроводных сигналов от WTRU 102a. Базовые станции 180a, 180b, 180c могут также обеспечивать функции управления мобильностью, такие как запуск передачи обслуживания, установление туннеля, управление радиоресурсами, классификация трафика, выполнение политики качества обслуживания (QoS) и т.п. Шлюз 182 ASN может служить в качестве точки агрегирования трафика и может отвечать за поисковый вызов, кэширование абонентских профилей, маршрутизацию к базовой сети 109 и т.п.
[0070] Радиоинтерфейс 117 между WTRU 102a, 102b, 102c и RAN 105 может быть определен как опорная точка R1, которая реализует спецификацию IEEE 802.16. Кроме того, каждый из WTRU 102a, 102b, 102c может устанавливать логический интерфейс (не показан) с базовой сетью 109. Логический интерфейс между WTRU 102a, 102b, 102c и базовой сетью 109 может быть определен как опорная точка R2, которая может быть использована для аутентификации, авторизации, управления конфигурацией IP-хоста и/или управления мобильностью.
[0071] Соединительная линия между каждой из базовых станций 180a, 180b, 180c может быть определена как опорная точка R8, которая включает в себя протоколы для содействия передачам обслуживания WTRU и переносу данных между базовыми станциями. Линия связи между базовыми станциями 180a, 180b, 180c и шлюзом 182 ASN может быть определена как опорная точка R6. Опорная точка R6 может включать в себя протоколы для содействия управлению мобильностью, основываясь на событиях мобильности, ассоциированных с каждым из WTRU 102a, 102b, 102c.
[0072] Как показано на фиг. 1E, RAN 105 может быть соединена с базовой сетью 109. Линия связи между RAN 105 и базовой сетью 109 может быть определена как опорная точка R3, которая включает в себя протоколы для содействия, например, переносу данных и возможностям управления мобильностью. Базовая сеть 109 может включать в себя домашний агент мобильного IP (MIP-HA) 184, сервер 186 аутентификации, авторизации, учета (AAA) и шлюз 188. Хотя каждый из вышеупомянутых элементов изображен как часть базовой сети 109, должно быть понятно, что любой из этих элементов может находиться во владении и/или управляться объектом иным, чем оператор базовой сети.
[0073] MIP-HA 184 может отвечать за управление IP-адресами и может позволить WTRU 102a, 102b, 102c осуществлять роуминг между различными ASN и/или различными базовыми сетями. MIP-HA 184 может предоставить WTRU 102a, 102b, 102c доступ к сетям с пакетной коммутацией, таким как Интернет 110, для содействия связи между WTRU 102a, 102b, 102c и IP-устройствами. Сервер AAA 186 может отвечать за аутентификацию пользователя и за поддержку пользовательских услуг. Шлюз 188 может содействовать взаимодействию с другими сетями. Например, шлюз 188 может предоставить WTRU 102a, 102b, 102c доступ к сетям с коммутацией каналов, таким как PSTN 108, для содействия связи между WTRU 102a, 102b, 102c и традиционными устройствами связи наземных линий. Кроме того, шлюз 188 может предоставить WTRU 102a, 102b, 102c доступ к сетям 112, которые могут включать в себя другие проводные и беспроводные сети связи, которыми владеют и/или управляют другие поставщики услуг.
[0074] Хотя не показано на фиг. 1E, должно быть понятно, что RAN 105 может быть соединена с другими ASN, и базовая сеть 109 может быть соединена с другими базовыми сетями. Линия связи между RAN 105 и другими ASN может быть определена как опорная точка R4, которая может включать в себя протоколы для координации мобильности WTRU 102a, 102b, 102c между RAN 105 и другими ASN. Линия связи между базовой сетью 109 и другими базовыми сетями может быть определена как опорная точка R5, которая может включать в себя протоколы для облегчения взаимодействия между домашними базовыми сетями и посещаемыми базовыми сетями.
[0075] В вариантах осуществления учитывается, что службы, основанные на близости (ProSe), могут привлекать все большее и большее внимание со стороны экосистемы сотовой технологии. Эти службы могут основываться на близости между двумя или более устройствами и могут обеспечить возможность специфических коммерческих и социальных прикладных задач, разгрузки сети и/или непосредственной связи общественной безопасности. Другие альтернативные технологии, например, Wi-Fi и/или Bluetooth, могут обеспечивать возможность прямой связи между двумя устройствами (D2D), возможно, в свободной от лицензии полосе и, следовательно, могут подвергаться более высоким помехам и более низкому качеству обслуживания. Сотовая технология может обеспечить возможность сетевого управления связью D2D. В вариантах осуществления предполагается, что может быть полезным сократить время сканирования устройства и/или его потребляемую мощность и, возможно, также с точки зрения уровня безопасности линии связи, предлагаемого централизованными инфраструктурами. Это может обеспечить возможность повторного использования ресурсов для связи D2D и/или инфраструктурного режима при управлении уровнем помех между одним или несколькими или каждым режимом. Добавление возможности D2D к сотовой технологии может быть полезным в применениях общественной безопасности. Оно может, например, обеспечить возможность использования одинаковой технологии для локальных сот в прямом режиме или режиме связи D2D и может, например, обеспечить возможность доступа к национальной сотовой сети с тем же оборудованием. Это может позволить получить экономию, обусловленную ростом масштабов производства. Интеграция обеих возможностей может улучшить время реагирования и координацию в случае крупных аварий, среди прочих условий.
[0076] Близость между двумя устройствами может быть определена с использованием переменного уровня точности (например, в зависимости от подхода). Например, использование GPS для определения близости между двумя устройствами может предусматривать два устройства, поддерживающих GPS, и может предусматривать, что оба устройства определяют местоположение, что может быть трудным в одном или нескольких или всех условиях (например, внутри помещения, на узкой улице и/или при сильном дожде/облачности). Использование сетевого позиционирования (например, триангуляции, основанной на известном местоположении или eNB) может приводить к другим неопределенностям, возможно, обусловленным характеристиками канала распространения. Варианты осуществления могут учитывать, что эти два подхода могут основываться на двух устройствах, сообщающих о своем местоположении в сеть, которая затем может определить степень их близости. Другие подходы выявления близости могут быть основаны на беспроводном приемопередающем модуле (WTRU), передающем маяк, и другом WTRU, пытающемся детектировать сигнал. Такие подходы могут действовать при любых условиях канала и окружающей среды, возможно, обеспечивая меру RF близости. В вариантах осуществления могут рассматриваться устройства и методы для обеспечения возможности таких механизмов обнаружения, например, в контексте систем LTE. В вариантах осуществления могут рассматриваться методы и устройства для передачи и/или приема сигнала обнаружения и/или определения того, когда необходимо передавать и/или принимать сигнал обнаружения.
[0077] В одном или нескольких вариантах осуществления термин “устройство” может охватывать, без ограничения его применимости, любой объект, такой как мобильное устройство (например, WTRU), или сетевой узел, или приложение, или, возможно, пользователь, или их комбинацию. Например, мобильное устройство может принимать роль сетевого устройства (например, в одном или нескольких вариантах осуществления D2D). Термин “устройство” или UE или WTRU может быть использован главным образом в этом смысле, если специально не оговаривается иначе. Для иллюстрации, а не для ограничения, можно рассмотреть следующие термины.
[0078] Обнаружение может относиться к первому устройству, обнаруживающему второе устройство. Обнаружение службы может относиться к устройству, обнаруживающему доступность службы. RF обнаружение может относиться к первому устройству, обнаруживающему близость второго устройства, основываясь на одной или нескольких радио характеристиках, например, первое устройство детектирует сигнал, переданный вторым устройством, или первое устройство информируется сетью о близости второго устройства (например, для близости на сотовом уровне). RF близость может относиться к первому устройству, обнаруживающему, что второе устройство находится в пределах некоторой дальности. Идентичность (идентификационная информация, идентификатор) обнаружения может относиться к идентификатору, который может быть использован для определения соотношения между процедурой обнаружения и запрашивающим устройством. Идентификатор обнаружения может быть ассоциирован с процедурой RF обнаружения или с процедурой обнаружения службы или с ними обеими. Идентификатор обнаружения службы может относиться к идентификатору обнаружения, ассоциированному с процедурой обнаружения службы. RF идентификатор может относиться к идентификатору обнаружения, ассоциированному с процедурой RF обнаружения. RF идентификатор может быть одним из индекса физического ресурса или последовательности скремблирования, численного значения, циклического избыточного кода (CRC), идентификатора обнаружения службы или т.п.
Сигнал обнаружения: Сигнал обнаружения, передаваемый первым устройством. Такой сигнал может приниматься вторым устройством и может быть использован для обнаружения RF близости. Сигнал обнаружения может включать в себя полезную нагрузку (например, идентификатор обнаружения службы).
Совместно используемый канал обнаружения (DISCH): Логический канал, который может содержать информацию обнаружения.
Физический канал от устройства к устройству (PD2DCH): Физический канал, который может быть использован для сигнала обнаружения и/или для передачи полезной нагрузки. Например, PD2DCH канал может переносить сообщения DISCH. PD2DCH может быть определен как физический канал между множеством WTRU. В некоторых вариантах осуществления, это может быть отклонением от обычных каналов, которые могут быть определены либо как канал восходящей линии связи (от WTRU к eNB), либо как канал нисходящей линии связи (от eNB к WTRU). Передачи по PD2SCH могут быть использованы в качестве сигнала обнаружения. Передачи по PD2SCH могут быть ассоциированы с передачей по меньшей мере одного физического сигнала, такого как по меньшей мере один опорный сигнал, используемый для целей демодуляции, по меньшей мере один сигнал синхронизации, используемый для целей синхронизации, и/или по меньшей мере одна преамбула или заключение, используемые для целей оценивания канала, и/или по меньшей мере один сигнал обнаружения.
Запрос обнаружения: Процедура, посредством которой устройство делает идентификатор обнаружения видимым и/или доступным для других устройств. Такой запрос может выполняться посредством передачи сигнала обнаружения и/или посредством передачи на DISCH.
Обнаруживаемая служба: Служба, которая может обнаруживаться другим устройством (например, WTRU или приложением) с использованием процедуры обнаружения службы.
Обнаруживаемое устройство: Устройство (например, второй WTRU), которое может обнаруживаться другим устройством (например, первым WTRU) с использованием процедуры RF обнаружения.
Обнаруживаемый WTRU: WTRU может обнаруживаться посредством оповещения о службе (например, WTRU имеет по меньшей мере одну обнаруживаемую службу), посредством передачи сигнала обнаружения (например, WTRU является обнаруживаемым устройством) или комбинацией того и другого. Таким образом, обнаруживаемый WTRU может представлять собой WTRU, который передает сигнал обнаружения и/или запрашивает передачу по меньшей мере идентификатора обнаружения на DISCH (например, транслируемого сетью) и/или который выполняет передачу по меньшей мере идентификатора обнаружения на DISCH.
Контролирующий (отслеживающий) WTRU: WTRU, который активно ведет поиск службы, другого WTRU или того и другого. Например, WTRU, который контролирует сигнал обнаружения и/или идентификатор обнаружения в заданном ресурсе по времени/частоте и/или на DISCH.
Область обнаружения: Область сети, где транслируется информация о процессах обнаружения. Это может быть сота или группа сот и т.п.
Центр области обнаружения: Сетевой объект, управляющий процессами обнаружения для данной области обнаружения.
[0079] В вариантах осуществления предполагается, что термин “сеть” относится к любому элементу или функции инфраструктуры беспроводной сети. Например, сетевой элемент может иметь способность управления передачей и/или приемом устройств (WTRU), передачи сигналов, используемых устройствами в качестве опорных и т.п. Примеры сетевых элементов могут включать в себя eNB, MME, S-GW и т.п. Термин “сеть” может относиться к любому устройству, которое имеет указанную способность, например, в конкретном контексте. Например, в некоторых приложениях общественной безопасности, возможно, что устройство принимает роль сети для некоторых функций.
[0080] Варианты осуществления могут предполагать один или более методов и/или устройств для планирования сигналов обнаружения, передачи и/или приема. Один или более вариантов осуществления могут быть применимы в контексте WTRU при наличии инфраструктуры сети LTE или под управлением другого устройства, действующего в качестве инфраструктуры сети. Один или более вариантов осуществления могут быть применимы в случае, когда WTRU может не находится в инфраструктуре сети (например, что может упоминаться как режим без инфраструктуры или специальный (ad-hoc) режим).
[0081] Хотя один или несколько вариантов осуществления могут быть описаны в контексте систем LTE, предполагаемые варианты осуществления могут быть применимы к другим беспроводным технологиям. В одном или нескольких вариантах осуществления может предполагаться, что WTRU знает свою роль, то есть, WTRU знает, должен ли он быть контролирующим или обнаруживаемым. Например, WTRU может принимать конфигурацию, указывающую его роль, посредством уровня приложений, посредством более высоких уровней сигнализации и/или через специальные сообщения L1. Один или несколько вариантов осуществления могут предполагать планирование сигнала обнаружения, чтобы WTRU определял, когда передавать сигнал обнаружения и/или когда принимать сигнал обнаружения и какие ресурсы использовать. Один или несколько вариантов осуществления могут предполагать передачу и прием сигналов обнаружения. В одном или более вариантах осуществления термин PDCCH может быть использован, например, для ссылки либо на PDCCH, либо на ePDCCH и/или, в общем, на любой тип канала планирования. Хотя предполагаемые методы и устройства могут быть описаны здесь в контексте известного носителя LTE (например, с PDCCH, CRS и т.п.), предполагаемые методы и устройства могут быть применимыми к новым (например, предполагаемым или до сего времени неопределенным) типам носителей (NCT).
[0082] В одном или нескольких вариантах осуществления термин “сигнал обнаружения” может быть использован при описании одного или более методов. В некоторых вариантах осуществления описанные методы и устройства могут применяться к последовательности обнаружения и/или полезной нагрузке обнаружения. В некоторых вариантах осуществления при ссылке на сигнал обнаружения, предполагаемые методы и устройства могут быть применимыми к последовательности обнаружения и/или полезной нагрузке обнаружения. В некоторых вариантах осуществления термины “сигнал обнаружения”, “последовательность обнаружения” и/или “полезная нагрузка обнаружения” могут быть использованы взаимозаменяемо.
[0083] Варианты осуществления предполагают один или более методов планирования для передачи сигнала обнаружения. Термин “сигнал обнаружения” может включать в себя одну или более или любую передачу между двумя или несколькими WTRU. Например, это может быть передача на физическом ресурсе или на физическом канале, например, сопровождаемая поддерживающими сигналами (например, сигналами синхронизации, преамбулы, опорным сигналом и/или сигналом обнаружения), которые могут включать в себя или не включать полезную нагрузку, в том числе, без ограничения указанным, физический сигнал (такой как SRS или сигнал синхронизации, например, PSS/SSS) или передачу по физическому каналу (например, с такой же структурой, как PUSCH или PDSCH, или новому каналу, который может использоваться для этой цели, например, PD2DCH). Это может быть сигнал, соответствующий описанным выше, и т.п.
[0084] WTRU может быть сконфигурирован, чтобы передавать сигнал обнаружения. Такая передача может выполняться на физических ресурсах, соответствующих частоте восходящей линии связи или нисходящей линии связи соты, причем такой аспект может быть частью конфигурации WTRU. WTRU может быть сконфигурирован для приема сигнала обнаружения с подобными физическими ресурсами.
[0085] Сигнал обнаружения может нести информацию, такую как управляющая сигнализация, или может быть ассоциирован с полезной нагрузкой. Такая полезная нагрузка может представлять собой информацию, соответствующую характеристикам WTRU, таким как идентификация, или радиоканал-носитель данных и/или радиоканалы-носители сигнализации, блоки системной информации (SIB) и/или блоки специальной системной информации для обнаружения или непосредственной связи (SIBD) и т.п.
[0086] Сигнал обнаружения может планироваться, например, динамически, полустатически, и/или конфигурироваться. Варианты осуществления могут предполагать выделение и/или планирование радио ресурсов для сигнала обнаружения, например, согласно одному или более или каждому из этих принципов.
[0087] WTRU может быть сконфигурирован с одним или несколькими наборами информации сигналов обнаружения, причем один или более или каждый может соответствовать различным процессам обнаружения. Процесс обнаружения может быть охарактеризован, например, набором параметров, которые могут включать в себя ассоциированный D-RNTI. Например, WTRU не может быть сконфигурирован с двумя процессами обнаружения, ассоциированными с тем же самым D-RNTI или с теми же самыми параметрами. Другими словами, WTRU может быть способным различать разные процессы обнаружения. Например, WTRU может быть сконфигурирован с процессом обнаружения, ассоциированным с одним или несколькими сигналами обнаружения и/или с одной или несколькими полезными нагрузками.
[0088] В одном или нескольких вариантах осуществления, касающихся периодической передачи сигнала обнаружения, WTRU может быть сконфигурирован для одного, или нескольких, или каждого процесса обнаружения со специфическим набором ресурсов (например, PRB, символы OFDM, субкадр и т.п.) для передачи сигнала обнаружения, что может включать в себя, например, конфигурацию для периодической передачи сигнала обнаружения.
[0089] WTRU может быть сконфигурирован с рядом параметров, применимых к планированию сигнала обнаружения (или к планированию передачи PD2DCH и/или применимых к передаче на PD2DCH), который может быть ассоциирован с процессом обнаружения. Такая конфигурация может быть принята в широковещательной передаче системной информации (например, как часть SIB), на DISCH, широковещательно передаваемом (транслируемом) в соте, с использованием выделенной сигнализации или их комбинации.
[0090] Один или несколько вариантов осуществления могут предполагать прием конфигурации в транслируемой системной информации (SysInfo) или посредством выделенной сигнализации. Например, WTRU (например, в режиме ожидания) может принимать транслируемую системную информацию, которая может включать в себя конфигурацию сигнала обнаружения. WTRU в соединенном режиме может принимать такую конфигурацию посредством выделенной сигнализации. Такая конфигурация сигнала обнаружения может включать в себя параметры, относящиеся к планированию передач сигналов обнаружения, например, информацию полустатического планирования, и/или параметры, которые могут потребоваться для динамического планирования.
[0091] Варианты осуществления могут предполагать прием конфигурации DISCH в транслируемой SysInfo и/или посредством выделенной сигнализации. Конфигурация, принимаемая WTRU (как, например, путем широковещательной передачи системной информации), может включать в себя параметры для получения канала обнаружения (DISCH), например, в рассматриваемой соте. Такой DISCH может быть логическим транспортным каналом, посредством которого WTRU может принимать набор идентификаторов (идентификатор службы и/или RF идентификатор) и, возможно, одну или более или каждую, ассоциированную с устройством, специфическую для устройства конфигурацию, например, конфигурацию сигнала обнаружения для RF обнаружения.
[0092] Один или несколько вариантов осуществления могут предполагать конфигурацию параметров планирования для сигнала обнаружения. Например, WTRU может принимать относящиеся к планированию и/или другие параметры конфигурации (например, для процесса обнаружения) согласно по меньшей мере конфигурации субкадра для декодирования PDCCH.
[0093] WTRU может принимать параметры временных характеристик (тайминга), относящиеся к приему управляющей сигнализации, по PDCCH (например, из которых WTRU может вывести временные характеристики применимой передачи сигнала обнаружения, например, согласно одному или нескольким методам, описанным здесь).
[0094] Например, такие параметры могут включать в себя конфигурацию кадра, например, в форме одного или нескольких из длительности цикла (DCycle), смещения (DOffset) и/или другого параметра для определения применимого(ых) радиокадра(ов) или субкадров.
[0095] WTRU может определять применимые субкадры согласно выражению:
[SFN*10 + номер субкадра] по модулю (DCycle)=DOffset
где в этом примере цикл (DCycle) и смещение (DOffset) могут быть выражены в единицах субкадров. Конфигурация субкадра может быть сконфигурирована, например, в форме битовой карты, указывающей один или несколько субкадров в рассматриваемых радиокадрах и т.п.
[0096] Например, применимые радиокадры или субкадры могут определяться посредством WTRU как функция индекса конфигурации субкадра или набор индексов, представляющий параметры, такие как длительность цикла (DCycle) и/или смещение (DOffset). В таблице 1 показаны примерный период DCycle специфической для соты или WTRU конфигурации субкадра или смещение DOffset специфическое для соты или WTRU для передачи сигнала(ов) обнаружения. Параметр D2D-SubframeConfig может быть обеспечен посредством сигнализации, такой как RRC. Субкадры, которые являются кандидатами для передачи сигналов обнаружения, могут удовлетворять выражению [SFN*10+номер кадра] по модулю (DCycle)∈ DOffset. Основываясь на примере, показанном в таблице 1, могут быть истолкованы подобные отображения длительности цикла, смещения и другие параметры из/на индекс или наборы индексов, описывающих случаи возможности передачи сигналов обнаружения, что может привести к вероятно различным настройкам для периодичностей, различным отображениям на допустимые субкадры для данного кадра и/или к числу возможностей передачи сигналов обнаружения на один мультикадровый период и т.п.
Примерная конфигурация субкадров сигналов обнаружения
(в субкадрах)
(в субкадрах)
[0097] Подходящие субкадры также могут определяться как функция конкретного RNTI и SFN, смещения и номера субкадра (например, согласно формуле: [SFN-D-RNTI] по модулю (смещение) =0), в котором WTRU активируется, чтобы контролировать PDCCH. Определение также может быть функцией SFN, смещения и конкретного RNTI.
[0098] В таком субкадре WTRU может контролировать PDCCH на присутствие конкретного RNTI (например, сконфигурированного D-RNTI). WTRU может осуществлять контроль в отношении DCI, которые могут быть специфическими для планирования от устройства к устройству. В таком субкадре, WTRU может делать попытки слепого декодирования на PDCCH в отношении размеров DCI, которые могут соответствовать DCI, который может быть специфическим для процедуры обнаружения. В некоторых вариантах осуществления возможны только такие размеры DCI и возможно, что WTRU не должен декодировать другую информацию планирования в рассматриваемом субкадре. WTRU может принять DCI, который может динамически планировать передачу сигналов обнаружения. WTRU может принять DCI, который может активировать и/или деактивировать сконфигурированный ресурс для сигнала обнаружения. WTRU может принять DCI, который заново ассоциирует сконфигурированный ресурс для сигнала обнаружения с другим идентификатором RF обнаружения. WTRU может определять, может ли он (или возможно должен) принимать или передавать соответствующий сигнал обнаружения, например, в соответствии со способами, описанными здесь (например, как функцию RNTI, пространства поиска, формата DCI, содержимого DCI, события PD2DCH и/или идентификатора RF обнаружения, ассоциированного с принятым DCI).
[0099] Такой контроль PDCCH может быть частью активного времени DRX WTRU. В таких случаях, WTRU может контролировать другие DCI и/или другие RNTI, применимые к субкадру, в соответствии с унаследованными процедурами (например, либо в режиме ожидания, либо в соединенном режиме). В некоторых вариантах осуществления это может быть не применимо для алгоритма DRX WTRU.
[0100] В одном или нескольких вариантах осуществления WTRU может принимать параметры, относящиеся к планированию, и/или параметры конфигурации (например, для процесса обнаружения) согласно по меньшей мере конфигурации субкадра для событий сигналов обнаружения. Например, такие параметры могут включать в себя конфигурацию кадра, например, в форме смещения для определения применимых радиокадров или субкадров. Например, в соответствии с формулой [SFN*10 + номер субкадра] по модулю (цикл)=смещение, где цикл может представлять собой периодичность, и смещение может представлять собой смещение субкадра относительно (со ссылкой на) номера кадра. Также может быть использована конфигурация субкадра в форме битовой карты, показывающей один или несколько субкадров в рассматриваемом(ых) радио кадре(ах) и т.п. События также могут определяться как функция конфигурируемого сетью номера субкадра (например, [SFN + номер субкадра] по модулю (цикл) =0). События могут определяться как функция конфигурируемого сетью конкретного RNTI для D2D.
[0101] В некоторых вариантах осуществления WTRU может принимать параметры временных характеристик, относящиеся к появлению передачи сигнала обнаружения. Например, WTRU может принимать информацию планирования, так что она может обеспечить параметры управления для событий, которые могут быть фиксированными и/или периодически повторяющимися во времени.
[0102] В одном или нескольких вариантах осуществления WTRU может принимать параметры, относящиеся к планированию, и/или другие параметры конфигурации (например, для процесса обнаружения) согласно по меньшей мере одному (или нескольким) RNTI для декодирования PDCCH. Такие параметры могут включать в себя RNTI (например, RNTI обнаружения (D-RNTI)) для приема информации управления по PDCCH (например, в частности, для динамического планирования).
[0103] Например, WTRU (либо в режиме ожидания, либо в соединенном режиме) может принимать системную информацию, широковещательно предаваемую сетью, причем эта информация может включать в себя совместно используемый RNTI (например, D-RNTI) для планирования ресурсов для сигнала обнаружения. Например, WTRU может декодировать управляющую сигнализацию, скремблированную совместно используемым D-RNTI в общем пространстве поиска PDCCH (например, пространстве поиска, специфическом для соты). В LTE, информация DCI может подвергаться контролю CRC. Тогда CRC может “маскироваться” (или эквивалентно “скремблироваться”) посредством RNTI. Здесь для простоты, в вариантах осуществления эта операция будет упоминаться как “DCI, скремблированный посредством RNTI”, или “управляющая сигнализация является скремблированной”. Если WTRU принимает конфигурацию сигнала обнаружения посредством выделенной сигнализации, то WTRU может декодировать управляющую сигнализацию, скремблированную соответствующим RNTI (например, также может применяться C-RNTI в случае использования специфических для сигнала обнаружения DCI) также в пространстве поиска, специфическом для WTRU.
[0104] В другом примере WTRU может принимать конфигурацию с использованием выделенной сигнализации, информация которой включает в себя RNTI (например, D-RNTI) для планирования от устройства к устройству. Например, WTRU может декодировать управляющую сигнализацию и определять, что информация планирования обнаружения присутствует для WTRU в PDCCH, расположенном в специфическом для D2D пространстве поиска, когда CRC PDCCH скремблирован посредством D-RNTI.
[0105] В другом примере WTRU может быть сконфигурирован с двумя RNTI, один из которых может использоваться, когда WTRU может планироваться для передачи сигнала обнаружения и/или на канале обнаружения, и другой может использоваться, когда WTRU может планироваться для приема сигнала обнаружения (например, RNTI приема и передачи). WTRU может декодировать PDCCH и может определять, что DCI содержит информацию планирования для приема сигнала обнаружения для рассматриваемого WTRU, возможно, если соответствующий CRC может быть скремблирован посредством RNTI приема (в некоторых вариантах осуществления, возможно, только если DCI может включать в себя идентификатор, который соответствует процессу обнаружения для рассматриваемого WTRU). WTRU может декодировать PDCCH и может определять, что DCI содержит информацию планирования для передачи сигнала обнаружения для рассматриваемого WTRU, возможно, если соответствующий CRC может быть скремблирован посредством RNTI передачи (в некоторых вариантах осуществления, возможно, только если DCI включает в себя идентификатор, который соответствует процессу обнаружения для рассматриваемого WTRU). В одном примере та же самая управляющая сигнализация, например, DCI, PDCCH и RNTI, может быть использована для планирования передающего WTRU и принимающего WTRU. В таких случаях RNTI передачи для одного WTRU может быть тем же самым, что и RNTI приема для целевого принимающего WTRU.
[0106] Такие параметры могут включать в себя RNTI для сигнализации, активации и/или деактивации сконфигурированного ресурса, например, RNTI для полу-постоянного планирования ресурсов для передачи от устройства к устройству, например, SPS-D-RNTI, если это имеет место. Такие параметры могут включать в себя RNTI для планирования DISCH, если он сконфигурирован.
[0107] В одном или нескольких вариантах осуществления WTRU может принимать параметры, относящиеся к планированию, и/или другие параметры конфигурации (например, для процесса обнаружения) согласно по меньшей мере пространству поиска, специфическому для обнаружения. WTRU может быть сконфигурирован со специфическим для обнаружения пространством поиска. Такое пространство поиска может определяться на основе по меньшей мере одного из идентификаторов, специфических для связи от устройства к устройству (например, идентификатора виртуальной группы ID VGID, идентификатора службы или RF идентификатора, D-RNTI, например, либо D-RNTI приема, либо D-RNTI передачи), числа CCE в рассматриваемом субкадре k, уровня L агрегирования CCE (например, 1, 2, 4, 8, 16 или их подмножество) и/или системного номера кадра SFN. Такие параметры могут быть аспектами конфигурации WTRU.
[0108] Например, CCE, соответствующие кандидату m PDCCH пространства поиска, специфического для обнаружения, могут быть заданы выражением:

где, например,
i=0, … L-l;
m=0, …, M(L)-1 (M(L) - число кандидатов PDCCH в SS, например, ссылка 36.213 таблица 9.1.1-1, или может быть функцией нового набора DCI для обнаружения);
Ncce: число CCE в субкадре #k;
Yk=(A.Yk-1)mod D
при A=39827, D=65537;
K=[ns/2], ns - число временных интервалов в радиокадре;
Y-1=VGID
[0109] Кроме того, WTRU может быть сконфигурирован с расширенным диапазоном для PDCCH, например, как расширение до набора ресурсных элементов (RE), используемых для PDCCH. Возможно, такое расширение может применяться только для специфического для обнаружения пространства поиска. Например, WTRU может инициализировать пространство поиска PDCCH с использованием виртуального ID, причем пространство поиска может перекрывать или не перекрывать общее пространство поиска и пространство поиска, специфическое для WTRU.
[0110] В одном или нескольких вариантах осуществления WTRU может принимать параметры, относящиеся к планированию, и/или параметры конфигурации (например, для процесса обнаружения) в соответствии с по меньшей мере множеством пространств поиска. Например, WTRU может быть сконфигурирован с множеством пространств поиска для декодирования PDCCH, где каждое пространство может быть ассоциировано с конкретной функцией. Например, успешное декодирование DCI в первом пространства поиска для конкретного RNTI может указывать, что управляющая сигнализация предназначена для передачи сигнала обнаружения, тогда как успешное декодирование DCI во втором пространстве поиска может указывать, что управляющая сигнализация может быть предназначена для приема сигнала обнаружения. Например, два WTRU, которые, как ожидается, должны принимать участие в том же самом процессе обнаружения, могут тогда конфигурироваться с одинаковым RNTI для различных пространств поиска, причем прием того же самого DCI может тогда интерпретироваться различным образом, например, либо как передача, либо как прием как функция заданной конфигурации. Возможно, дополнительное пространство поиска может располагаться в RE, отличных от таковых PDCCH соты. Возможно, дополнительное пространство поиска может располагаться на ePDCCH.
[0111] В одном или нескольких вариантах осуществления WTRU может принимать параметры, относящиеся к планированию, и/или другие параметры конфигурации (например, для процесса обнаружения) в соответствии с по меньшей мере типом планирования для сигнала обнаружения и ассоциированных параметров. В одном или нескольких вариантах осуществления WTRU может принимать конфигурацию, обеспечивающую возможность динамического планирования для сигнала обнаружения. Например, WTRU может использовать принятую конфигурацию либо для получения дополнительной информации управляющей сигнализации (например, в DCI на PDCCH, скремблированном посредством D-RNTI, или в формате(ах) DCI, специфическом(их) для сигнала обнаружения, скремблированном(ых) посредством C-RNTI на PDCCH) посредством динамического планирования применимого(ых) субкадра(ов). Здесь описаны примеры такого дополнительного содержимого управляющей сигнализации.
[0112] В одном или нескольких вариантах осуществления WTRU может принимать конфигурацию, обеспечивающую возможность полу- постоянного планирования для сигнала обнаружения. Например, WTRU может вести себя, как здесь описано. Такая конфигурация может приниматься либо по широковещательному каналу, либо посредством выделенной сигнализации. Такая конфигурация может включать в себя SPS-D-RNTI, информацию физического ресурса и/или временных характеристики для субкадра, применимого для информации планирования.
[0113] В одном или нескольких вариантах осуществления WTRU может принимать параметры, относящиеся к планированию, и/или параметры конфигурации (например, для процесса обнаружения) в соответствии с по меньшей мере параметрами передачи для сигнала обнаружения, как здесь описано.
[0114] В одном или нескольких вариантах осуществления WTRU может принимать параметры, относящиеся к планированию, и/или параметры конфигурации (например, для процесса обнаружения) в соответствии с по меньшей мере любыми комбинациями описанных здесь методов. Возможно, WTRU может принимать параметры временных характеристик, относящиеся к субкадру, для приема планирования PDCCH, и параметры временных характеристик, относящиеся к субкадру, для событий передачи сигнала обнаружения. Например, WTRU может принимать DCI, скремблированный посредством D-RNTI, который планирует передачу сигнала обнаружения для следующего возможного события сигнала обнаружения.
[0115] В другом примере WTRU может быть сконфигурирован с одним или более специальным идентификатором радиосети, ассоциированным с процессом обнаружения (например, D-RNTI). WTRU может тогда принимать информацию планирования, относящуюся к обнаружению, по PDCCH посредством детектирования D-RNTI на принятом DCI.
[0116] В одном или нескольких вариантах осуществления WTRU, сконфигурированный со структурой кадра типа 2 (то есть TDD), может определять, что субкадр может использоваться для обнаружения, как функцию SFN и как функцию TDD конфигурации. Например, контролирующий WTRU может определить, что он может принимать сигнал обнаружения в субкадре, смежном (например, непосредственно предшествующем субкадре) со специальным субкадром в радиокадре, в соответствии с функцией SFN. В некоторых вариантах осуществления это может происходить, возможно, только если запланировано в предыдущем субкадре в соответствии с соотношением временных характеристик, применимым к рассматриваемой конфигурации TDD. Возможно, субкадр обнаружения может быть либо первым событием (например, субкадром 0) специального субкадра в рассматриваемом радиокадре, либо вторым событием (например, субкадром 5) (если применимо для конфигурации TDD), либо обоими (если применимо для конфигурации TDD). Это может минимизировать величину переключения от DL на UL вследствие связи D2D, а также минимизировать разрывы планирования ее для передачи TDD LTE.
[0117] В одном или нескольких вариантах осуществления рассматривается один или несколько форматов управляющей сигнализации. Для поддержки планирования передач от устройства к устройству, рассматривается один или несколько новых форматов DCI. Новый (например, не определенный до сих пор для такой цели) формат DCI может проектироваться, чтобы переносить один или несколько вышеупомянутых параметров. Например, новый формат DCI может переносить информацию физических характеристик сигнала обнаружения, идентификатор обнаружения и/или информацию физических радио ресурсов для передачи и/или приема сигнала обнаружения. В одном примере, поскольку информация планирования может приниматься множеством WTRU на совместно используемом канале, информация планирования может не переносить точное указание того, должен ли WTRU быть передающим или принимающим сигнал обнаружения. Вернее, каждый WTRU может быть предварительно сконфигурированным для его режима работы. Информация планирования может приниматься или назначаться для WTRU, и в этом случае DCI может содержать явное указание того, предназначено ли планирование для целей приема или передачи.
[0118] В некоторых вариантах осуществления DCI, который планирует передачу от устройства к устройству (такую как сигнал обнаружения) может дополнительно к информации планирования иметь по меньшей мере одну из следующих функциональностей, возможно одну для одного или более или каждого процесса обнаружения и, возможно, для множества процессов сразу: активация/деактивации процесса обнаружения (или части процесса обнаружения, такой как полезная нагрузка); ассоциация, повторная ассоциация или отмена ассоциации (например, завершение) между процессом обнаружения и идентификатором; и/или ассоциация, повторная ассоциация или отмена ассоциации (например, завершение) между идентификатором обнаружения службы и идентификатором RF обнаружения; такой DCI может быть принят одним (например, если скремблируется посредством C-RNTI) или множеством WTRU (например, если скремблируется посредством D-RNTI в общем пространстве поиска).
[0118] Один или несколько вариантов осуществления учитывают одну или несколько временных характеристик передачи сигнала обнаружения. Временная характеристика передачи сигнала обнаружения является функцией приема применимой управляющей сигнализации. Такой (возможно, специфический для сигнала обнаружения) DCI может дополнительно включать в себя информацию временных характеристик, либо относительно приема DCI, относительно текущего периода, абсолютного значения (например, SFN/номера субкадра), либо указывающую приближающийся субкадр, сконфигурированный для обнаружения. Возможно, такой DCI планирует (в некоторых вариантах осуществления, возможно, всегда) следующую возможность появления сигнала обнаружения (согласно конфигурации сигнала обнаружения) не раньше, чем n+x, где n - субкадр, в течение которого WTRU принимает DCI, и x может быть фиксированным смещением (например, 4 мс) или сигнализироваться в самом DCI. Возможно, такой DCI может планировать множество субкадров сразу (например, мульти-субкадровое планирование). Возможно, DCI может включать в себя информацию планирования для множества передач сигнала обнаружения, возможно, проиндексированных с использованием идентификатора, например, RF идентификатора.
[0120] В некоторых вариантах осуществления сигнал обнаружения может охватывать множество субкадров. В таких случаях WTRU может быть сконфигурирован для применения информации планирования обнаружения для полной длительности сигнала обнаружения. Такие аспекты могут быть указаны как часть управляющей информации, которая может планировать передачу (например, внутри DCI, как функцию пространства поиска DCI или как функцию RNTI).
[0121] Один или несколько вариантов осуществления предусматривают временные характеристики передачи сигнала обнаружения как функцию D-RNTI. В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения времени планирования сигнала обнаружения неявным образом, основываясь на идентификаторе, например, D-RNTI. Например, D-RNTI может быть специфическим для процесса обнаружения. WTRU может определять набор субкадров для передачи/контроля для сигнала обнаружения посредством применения D-RNTI и, возможно, других конфигурированных параметров, таких как длина цикла, смещение субкадра и т.п., к конкретной функции (например, такой, как могла бы задаваться в спецификациях стандартов).
[0122] Например, WTRU может быть сконфигурирован, чтобы передавать/контролировать сигнал обнаружения для субкадра s, удовлетворяющего выражению:
[SFN*10 + номер субкадра] по модулю(Nd-cycle)=(D-RNTI) по модулю (Nd-Cycle)+Doffset
где Nd-Cycle - длина цикла сигнала обнаружения и Doffset - смещение сигнала обнаружения (в одном практическом примере Doffset не используется и может принимать значение 0). Один или оба из циклов сигнала обнаружения и/или смещения сигнала обнаружения могут конфигурироваться полустатически через более высокие уровни.
[0123] Подобным образом, вышеупомянутые методы могут применяться, но как функция пространства поиска, в котором принимается DCI, как функция идентификатора (например, идентификатора RF обнаружения), или как функция первого CCE DCI. Например, WTRU может успешно декодировать DCI в субкадре n, идентифицировать первый CCE соответствующего DCI и передавать в субкадре n+k, где k может быть функцией CCE, например, основываясь на таблице и/или конфигурации. Индекс ресурса для передачи сигнала может быть функцией вышеуказанного.
[0124] Один или несколько вариантов осуществления рассматривают методы для определения идентификатора RF обнаружения для передачи сигнала обнаружения. В одном или нескольких вариантах осуществления, возможно, когда WTRU успешно декодирует DCI на PDCCH, который может быть применимым к сигналу обнаружения, WTRU может определять идентификатор RF обнаружения, соответствующий передаче сигнала обнаружения, как функцию первого элемента управления каналом (CCE) соответствующего DCI. Возможно, соответствующий идентификатор может быть индексом для физического ресурса для соответствующей передачи. Возможно, идентификатор может быть выведен на основе или в комбинации с RNTI или индексом для RNTI, соответствующего DCI (например, RNTI, используемого, чтобы маскировать CRC этого DCI) (например, в случае, когда WTRU вслепую выполняет декодирование с использованием множества RNTI). Аналогично, вышеупомянутый способ может применяться как функция пространства поиска, в котором принимается DCI или соответствующий ему RNTI.
[0125] В некоторых вариантах осуществления WTRU может определять идентификатор RF обнаружения, соответствующий передаче сигнала обнаружения, как функцию характеристики принятого сигнала обнаружения (например, скремблирования, применяемого к самой передаче сигнала обнаружения) (например, слепое детектирование на основе приема сигнала обнаружения).
[0126] В некоторых вариантах осуществления WTRU может определять идентификатор RF обнаружения, соответствующий передаче сигнала обнаружения, как функцию полезной нагрузки в DCI, который планирует саму передачу сигнала обнаружения (например, ее идентификатор или индекс могут явно сигнализироваться).
[0127] В некоторых вариантах осуществления WTRU может определять идентификатор RF обнаружения, соответствующий передаче сигнала обнаружения, как функцию полезной нагрузки в DCI, который может активировать ресурс для передачи сигнала обнаружения (например, управляющая сигнализация может переключать состояние активации для события конфигурированного сигнала обнаружения и явно сигнализировать идентификатор, ассоциированный с соответствующим ресурсом).
[0128] Один или несколько вариантов осуществления рассматривают один или несколько методов для полу-постоянного планирования сигнала обнаружения. WTRU может быть сконфигурирован для получения дополнительной информации управляющей сигнализации посредством динамического планирования в подходящем(их) субкадре(ах). Например, WTRU может принимать дополнительную управляющую сигнализацию в DCI, принятом на PDCCH, и CRC, скремблированный посредством D-RNTI и/или SPS-D-RNTI, или в формате(ах) DCI, специфическом(их) для сигнала обнаружения, принятого на PDCCH, и CRC, скремблированный посредством C-RNTI.
[0129] Возможно, WTRU может последовательно принимать команду активации для соответствующего(их) ресурса(ов), подобно полу-постоянному планированию ресурсов PD2DCH. WTRU может определять, что принятый управляющий сигнал является командой активации, например, на основе информации, содержащейся в DCI (например, 1-битовое указание), на основе RNTI (например, SPS-D-RNTI), используемого для декодирования, на основе субкадра приема или на основе пространства поиска, в котором WTRU принимает управляющую сигнализацию.
[0130] Аналогично, WTRU также может принимать команду деактивации такими же способами, как для команды активации. WTRU также может освобождать ресурсы, следуя одному или нескольким триггерам событий, таким как по меньшей мере одно из:
- деактивации ресурса, применимого для связи от устройства к устройству;
- обнаружения потери близости;
- завершения передач сигналов обнаружения;
- исчерпывания ресурсов (например, основанная на таймере неявная деактивация);
- потери действительной синхронизации, например, истечения таймера выравнивания времени (TAT), соответствующего обслуживающей соте соединения RRC; и/или
- события мобильности с сетью или сбоя линии радиосвязи (RLF) с сетью или RLF на линии связи D2D.
[0131] Такая команда активации/деактивации может приниматься на PDCCH, скремблированным либо посредством C-RNTI (в случае выделенного планирования), либо посредством D-RNTI.
[0132] В некоторых вариантах осуществления конфигурация также может включать в себя полустатическое распределение ресурсов, применимое к группе WTRU. Например, дополнительная информация управляющей сигнализации может приниматься в широковещательной передаче системной информации, например, в случае статического полу-постоянного распределения ресурсов. Например, WTRU может затем принимать команду активации для соответствующего(их) ресурса(ов), подобно полу-постоянному планированию ресурсов для сигнала обнаружения. Аналогично, WTRU может также принимать команду деактивации. Такая команда может приниматься в DCI на PDCCH, скремблированном, например, посредством D-RNTI или SPS-D-RNTI (например, в случае планирования обнаружения для множества WTRU) или посредством C-RNTI (например, для выделенного и/или избирательного планирования обнаружения).
[0133] Арбитраж и/или выделение ресурсов может распределяться между участвующими WTRU или управляться одним из WTRU, участвующих в процессе обнаружения.
[0134] В некоторых вариантах осуществления передающий WTRU может быть сконфигурирован, возможно после приема команды активации, среди прочих сценариев, чтобы начинать передачу сигнала обнаружения согласно сконфигурированным полу-постоянным ресурсам и/или сконфигурированным параметрам. В некоторых вариантах осуществления, возможно после приема команды деактивации, среди прочих сценариев, передающий WTRU может быть сконфигурирован, чтобы останавливать передачу сигнала обнаружения. В некоторых вариантах осуществления подобные конфигурации также могут применяться к принимающему WTRU, возможно, за исключением того, что принимающий WTRU может быть сконфигурирован для контроля сигнала обнаружения (и может не быть сконфигурирован для его передачи). Например, WTRU может быть сконфигурирован для передачи/контроля сигнала обнаружения для субкадра s, удовлетворяющего вышеприведенному уравнению (2).
[0135] Один или несколько вариантов осуществления рассматривают методы для приема параметров, ассоциированных с передачей сигнала обнаружения. WTRU может быть опционально сконфигурирован с дополнительной информацией планирования или может быть сконфигурирован, чтобы принимать дополнительную управляющую информацию планирования, которая может включать в себя одно или более из следующего, например: набор блоков физических ресурсов (PRB), схему модуляции и кодирования (MCS), регулировки управления мощностью (TPC), длительность символа (например, в случае сигнала, который охватывает один или несколько символов) и т.п., которые WTRU может использовать, чтобы определять выделение ресурсов для передач сигналов обнаружения.
[0136] Конфигурация сигнала обнаружения может дополнительно включать в себя характеристики сигнала, например, начальное значение или корень генератора псевдослучайной последовательности для сигнала обнаружения, индекс для последовательности скремблирования, индекс синхронизации, параметр инициализации кода, формат сигнала (например, имеется или нет полезная нагрузка), корень Задова-Чу и/или циклический сдвиг или т.п.
[0137] В одном или нескольких вариантах осуществления рассматриваются действия WTRU после приема управляющей сигнализации, применимой к PD2DCH. Некоторые варианты осуществления учитывают, что планирование совместно используемого сигнала обнаружения может интерпретироваться как функция контролирующего/обнаруживаемого WTRU.
[0138] WTRU может интерпретировать информацию планирования сигнала обнаружения как функцию своей процедуры и/или роли обнаружения. Например, контролирующий WTRU может определять, что планирование предназначено для приема сигнала обнаружения и может дополнительно пытаться детектировать сигнал обнаружения, возможно, используя подходящие параметры. Аналогично, обнаруживаемый WTRU может определять, что информация планирования предназначена для передачи сигнала обнаружения, и может дополнительно передавать сигнал обнаружения, используя подходящие параметры.
[0139] Интерпретирование информации планированию может иметь аспект конфигурации. Например, WTRU может быть сконфигурирован посредством сигнализации RRC или, возможно, динамически, например, посредством элемента управления (CE) MAC, посредством DCI, с помощью которого RNTI используется для успешного декодирования соответствующего DCI, так что он явно указывает режим, например, одно из передачи или приема. Такие средства включают в себя бит явного указания в информации планирования (например, сообщение или информационный бит в DCI).
[0140] В одном или нескольких вариантах осуществления рассматривается обратная связь для планирования сигнала обнаружения. WTRU может передавать в сеть обратную связь HARQ восходящей линии связи, возможно, когда он может успешно принимать информацию планирования, применимую к сигналу обнаружения в субкадре n. В одном примере WTRU может передавать обратную связь HARQ в субкадре n+4 с использованием ресурса PUCCH, который в некоторых вариантах осуществления может выводиться согласно одному или нескольким унаследованным способам (например, на основе первого CCE DCI и/или на основе конфигурации PUCCH WTRU).
[0141] В одном или нескольких вариантах осуществления рассматривается подтверждение планирования сигнала обнаружения - обнаруживаемого WTRU. В некоторых вариантах осуществления WTRU (например, обнаруживаемый WTRU), который принимает информацию планирования, например, в субкадре n, применимом для передачи сигнала обнаружения, может передавать ACK HARQ запроса для рассматриваемого DCI, например, на PUCCH, например, в субкадре n+4, (или более обобщенно, после предопределенной задержки).
[0142] В некоторых вариантах осуществления WTRU (например, обнаруживаемый WTRU), который принимает планирование управления, активирующее конфигурированный ресурс, применимый для передач сигналов обнаружения, может передавать ACK HARQ для рассматриваемого DCI на PDCCH. В некоторых вариантах осуществления, возможно, только обнаруживаемый WTRU может передавать обратную связь HARQ (ACK/NACK), например, WTRU, который может выполнять передачу на соответствующем ресурсе.
[0143] В некоторых вариантах осуществления WTRU (например, обнаруживаемый WTRU), который принимает планирование управления, которое деактивирует сконфигурированный ресурс, применимый для передач сигналов обнаружения, может передавать ACK HARQ для соответствующего DCI на PDCCH. В некоторых вариантах осуществления, возможно только обнаруживаемый WTRU может передавать обратную связь HARQ (ACK/NACK), например, WTRU, который ранее выполнял передачу на соответствующем ресурсе.
[0144] В некоторых вариантах осуществления WTRU (например, контролирующий WTRU), который принимает информацию управления, применимую для приема передачи сигнала обнаружения, может не передавать никакой обратной связи HARQ для соответствующей управляющей информации. Возможно, контролирующий WTRU может не передавать никакой обратной связи HARQ, например, WTRU, который может не выполнять передачу на соответствующем ресурсе, но может принимать передачу на нем.
[0145] В одном или нескольких вариантах осуществления рассматривается подтверждение планирования сигналов обнаружения, где контролирующий WTRU может указывать RF близость или нет. В некоторых вариантах осуществления WTRU (например, контролирующий WTRU), который принимает информацию управления, применимую для приема передачи сигнала обнаружения, может передавать обратную связь HARQ для соответствующей передачи в субкадре, следующем за субкадром запланированной передачи (например, n+4, где n - субкадр передачи сигнала обнаружения). В некоторых вариантах осуществления это может применяться для случаев (и в некоторых вариантах осуществления только таких случаев), где информация планирования может приниматься с использованием специализированного способа (C-RNTI, конфигурация RRC и т.п.). Например, если WTRU определяет, что прием сигнала обнаружения является успешным (например, WTRU находится поблизости), возможно согласно некоторым предопределенным критериям, то он может передавать ACK HARQ на ресурсе PDCCH в соответствующем субкадре с использованием ресурса, выведенного неявным образом на основе первого CCE соответствующего DCI, как функцию RNTI соответствующего DCI, или на основе пространства поиска (если, множество пространств поиска может быть сконфигурировано, например, по одному для каждого сигнала обнаружения или RF идентификатора). В некоторых вариантах осуществления WTRU может передавать NACK HARQ, если он определяет, что прием сигнала обнаружения является безуспешным.
[0146] В вариантах осуществления рассматривается один или несколько методов передачи и приема планирования ассоциированной полезной нагрузки. В одном или нескольких вариантах осуществления WTRU может быть сконфигурирован для передачи (и/или приема) полезной нагрузки, ассоциированной с сигналом обнаружения. Более конкретно, WTRU может быть сконфигурирован с процессом обнаружения, для которого сконфигурирована полезная нагрузка. В некоторых вариантах осуществления WTRU может быть сконфигурирован с форматом сигнала обнаружения, который включает в себя последовательность обнаружения и/или полезную нагрузку. WTRU может тогда передавать полезную нагрузку вместе с последовательностью обнаружения в едином сигнале обнаружения (например, как здесь описано).
[0147] В некоторых вариантах осуществления полезная нагрузка и/или последовательность обнаружения не могут передаваться в том же самом формате сигнала обнаружения. Например, WTRU может передавать полезную нагрузку независимо от последовательности обнаружения, например, в другой момент времени (например, в другом субкадре) и/или на различных ресурсных блоках. В таких сценариях контролирующий WTRU может быть сконфигурирован, чтобы пытаться декодировать полезную нагрузку обнаружения после того, как он сначала успешно детектировал ассоциированную последовательность обнаружения.
[0148] В вариантах осуществления рассматривается один или несколько методов, чтобы определять, когда передавать полезную нагрузку. В одном или нескольких вариантах осуществления рассматриваются методы, согласно которым WTRU должен определять, когда передавать полезную нагрузку обнаружения. Один или несколько рассматриваемых методов также могут применяться для контролирующего WTRU, например, для определения, когда контролировать полезную нагрузку.
[0149] В некоторых вариантах осуществления рассматривается независимый набор параметров. WTRU может быть сконфигурирован, чтобы передавать полезную нагрузку обнаружения, например, согласно одному или нескольким способам, описанным здесь для передачи сигнала обнаружения. Более конкретно, WTRU может быть сконфигурирован с отдельным набором независимых параметров для передачи полезной нагрузки обнаружения (например, независимо или частично независимо от последовательности обнаружения). Например, WTRU может быть сконфигурирован, чтобы передавать полезную нагрузку обнаружения периодически, с использованием различных наборов ресурсов, как передачу последовательности обнаружения. Например, WTRU может быть сконфигурирован с рабочим циклом, более низким для передачи полезной нагрузки обнаружения, чем для передачи последовательности обнаружения.
[0150] В некоторых вариантах осуществления рассматриваются методы, которые могут быть основаны на динамическом указании. WTRU может быть сконфигурирован, чтобы определять, передавать или нет полезную нагрузку обнаружения, путем приема информации явным образом из канала управления нисходящей линии связи (например, PDCCH), посылаемого из eNB. Подобно тому, как здесь описано для общего сигнала обнаружения, WTRU также может быть дополнительно сконфигурирован, чтобы контролировать PDCCH на присутствие специального RNTI полезной нагрузки D2D (DP-RNTI), например, во время субкадров, разрешенных для связи D2D. В некоторых вариантах осуществления WTRU может быть сконфигурирован, чтобы контролировать PDCCH на присутствие D-RNTI, ассоциированного с процессом обнаружения, и может определять, передавать или нет ассоциированную полезную нагрузку, на основе DCI. Например, на основе формата DCI, WTRU может определять формат DCI вслепую и может определять, указывает ли DCI передачу полезной нагрузки или передачу последовательности обнаружения; и/или, на основе явного содержимого декодируемого DCI, WTRU может декодировать DCI D2D и может определять значение конкретного поля в управляющих данных, явно указывающее передачу полезной нагрузки.
[0151] В некоторых вариантах осуществления рассматриваются методы, основанные на периодическом отношении. В некоторых вариантах осуществления, для определения того, когда передавать полезную нагрузку обнаружения, WTRU может быть сконфигурирован, например, с отношением передачи полезной нагрузки обнаружения. Это отношение (например, Nd:p) может показывать, например, отношение числа передач последовательности обнаружения к числу передач полезной нагрузки обнаружения. WTRU может тогда передавать одну полезную нагрузку обнаружения для одной или более или каждой Nd:p передачи сигнала обнаружения. Например, WTRU может быть сконфигурирован, чтобы передавать полезную нагрузку обнаружения на том же самом физическом ресурсе, что и последовательность обнаружения. Например, WTRU может быть сконфигурирован, чтобы передавать полезную нагрузку обнаружения в то же самое время (например, в том же субкадре), что и последовательность обнаружения, но на другом наборе физических ресурсов.
[0152] Возможно, для того, чтобы контролирующий WTRU мог определять, когда передается полезная нагрузка обнаружения, среди прочих сценариев, цикл может быть синхронизирован как в передатчике, так и в приемнике, с общим опорным тактовым сигналом. В одном примере WTRU (передающий или контролирующий) может быть сконфигурирован, чтобы использовать системный номер кадра (SFN) для определения начала цикла передачи полезной нагрузки обнаружения. Например, WTRU может быть сконфигурирован, чтобы определять начало цикла передачи полезной нагрузки обнаружения путем использования операции по модулю на SFN, например, используя дополнительные параметры, такие как длина цикла передачи полезной нагрузки обнаружения (например, Np-cycle) (например, в терминах субкадра), ассоциированный D-RNTI или DP-RNTI и/или другие возможные сконфигурированные параметры. В одном примере WTRU может определять субкадр, для которого может планироваться передача полезной нагрузки обнаружения, основываясь на периодической конфигурации субкадра обнаружения в уравнении (2) и параметре, указывающем цикл полезной нагрузки обнаружения относительно цикла последовательности обнаружения (Np-cycle в следующем примере):
[SFN*10 + номер субкадра] по модулю (Nd-cycle × Np-cycle)=(D-RNTI) по модулю (Nd-cycle × Np-cycle) + Dd-offset
[0153] В другом подходе, для того, чтобы позволить контролирующему WTRU определять начало цикла для передачи полезной нагрузки обнаружения, передающий WTRU может быть сконфигурирован, чтобы указывать отсчет явным образом как часть последовательности обнаружения. В некоторых вариантах осуществления, WTRU может быть сконфигурирован, чтобы присоединять предопределенное число битов отсчета к последовательности обнаружения. Контролирующий WTRU может тогда детектировать биты отсчета во время процесса обнаружения и может определять начало цикла для передачи полезной нагрузки обнаружения и/или время для следующей передачи полезной нагрузки обнаружения. В некоторых вариантах осуществления передающий WTRU может быть сконфигурирован, чтобы выбирать одну из множества последовательностей обнаружения для указания отсчета. В таких сценариях соотношение между отсчетом и действительной последовательностью обнаружения может быть предварительно определено, например, явным образом в спецификациях и/или через отношение с параметрами последовательности обнаружения (например, с корнем ZC, циклическим сдвигом в случае последовательности Задова-Чу). WTRU может быть сконфигурирован, чтобы передавать/принимать полезную нагрузку обнаружения, например, когда отсчет достигает конкретного значения, например, нуля.
[0154] В одном или нескольких вариантах осуществления рассматриваются методы для определения параметров передачи полезной нагрузки. В некоторых вариантах осуществления WTRU может быть сконфигурирован, чтобы передавать полезную нагрузку на предопределенном наборе ресурсов. Более конкретно, WTRU может быть сконфигурирован с фиксированным набором PRB, символа в субкадре, MCS и/или размера полезной нагрузки. WTRU может тогда выполнять передачу полезной нагрузки в соответствующее время согласно одному или нескольким методам, описанным здесь.
[0155] В некоторых вариантах осуществления WTRU может быть сконфигурирован, чтобы определять физические ресурсы полезной нагрузки для передачи, основываясь на физических ресурсах ассоциированной последовательности обнаружения. Например, WTRU может быть сконфигурирован, чтобы передавать полезную нагрузку на том же самом наборе PRB, что и для последовательности обнаружения, но на другом (например, предварительно сконфигурированном) символе OFDM субкадра. Например, WTRU может быть сконфигурирован, чтобы передавать полезную нагрузку на том же самом наборе ресурсов (символе(ах) OFDM и PRB), что и для последовательности обнаружения, потенциально заменяя передачу последовательности обнаружения. Еще в одном примере WTRU может быть сконфигурирован со смещением ресурса, которое он может применять к индексу физического ресурса последовательности обнаружения для определения индекса ресурса ассоциированной полезной нагрузки обнаружения. В некоторых вариантах осуществления это смещение может быть фиксированным и конфигурироваться посредством сигнализации RRC. Например, это смещение может зависеть от временных параметров, таких как SFN или номер субкадра, и потенциально от других параметров, таких как D-RNTI, например, для рандомизации ресурса среди одного или более или всех WTRU.
[0156] В некоторых вариантах осуществления, WTRU может быть сконфигурирован с динамическими параметрами передачи полезной нагрузки, например, указываемыми на PDCCH в новом (например, предполагаемом) формате DCI. Предполагаемый формат DCI может, например, указывать ресурсы радиосвязи, ассоциированные с полезной нагрузкой и/или форматом полезной нагрузки (например, размер полезной нагрузки, MCS и т.п.).
[0157] В одном или нескольких вариантах осуществления рассматриваются методы, ассоциированные с приемом полезной нагрузки обнаружения. WTRU может быть сконфигурирован, чтобы принимать полезную нагрузку обнаружения согласно одному или нескольким методам, описанным здесь.
[0158] WTRU может быть сконфигурирован, чтобы сначала детектировать последовательность обнаружения и затем определять, пытаться или нет декодировать ассоциированную полезную нагрузку обнаружения. Более конкретно, WTRU может быть сконфигурирован, чтобы принимать решение декодировать ассоциированную полезную нагрузку обнаружения, когда удовлетворяются одно или несколько из следующих условий (в любом порядке или комбинации): детектированная последовательность обнаружения может соответствовать сигналу обнаружения, сконфигурированному с полезной нагрузкой; детектированная последовательность обнаружения может быть ассоциирована со службой или классом службы, требующим детектирования ассоциированной полезной нагрузки: WTRU может быть сконфигурирован со списком сигналов обнаружения и ассоциированным классом службы. WTRU может определять класс службы, ассоциированный с последовательностью обнаружения, например, путем просмотра ее конфигурации; и/или WTRU также может быть сконфигурирован для определения класса службы, ассоциированного с последовательностью обнаружения, основываясь на свойстве детектированной последовательности (например, корне ZC, циклическом сдвиге и т.п.) и предопределенном ассоциированном выполнении через конфигурацию; контент полезной нагрузки обнаружения, ассоциированной с детектированной последовательностью обнаружения, не может декодироваться посредством WTRU (например, не может никогда декодироваться); контент полезной нагрузки обнаружения, ассоциированной с детектированной последовательностью обнаружения, не может считываться в последние Tpayload_expiry (истечение времени полезной нагрузки) секунд (или в другую единицу времени); контент полезной нагрузки обнаружения, ассоциированной с детектированной последовательностью обнаружения, может утратить силу. Более конкретно, WTRU может быть сконфигурирован с одним или несколькими значениями таймера, ассоциированными с конкретным сигналом обнаружения и/или классом сигнала обнаружения. WTRU может быть сконфигурирован, чтобы запускать таймер, когда полезная нагрузка, ассоциированная с сигналом обнаружения, может считываться, и может выполнять одно из следующего, когда таймер истекает: стирать контент полезной нагрузки из памяти WTRU и/или запрашивать более низкие уровни для повторного получения полезной нагрузки.
[0159] Значение таймера (например, Tpayload_expiry) или другие параметры могут конфигурироваться для класса службы, к которому может принадлежать сигнал обнаружения. В некоторых вариантах осуществления один или более или каждый сигнал обнаружения может быть сконфигурирован с конкретным значением таймера, где, как специальный случай, 0 мог бы указывать, что полезная нагрузка может считываться один или несколько или каждый раз, и бесконечное значение могло бы указывать, что информация полезной нагрузки может считываться один раз (например, только один раз) и может сохраняться в памяти WTRU.
[0160] WTRU может быть сконфигурирован, чтобы сбрасывать из буфера полезной нагрузки контент полезной нагрузки, который он мог считать из одного или нескольких сигналов обнаружения, возможно, когда удовлетворяются одно или несколько из следующих условий (в любом порядке или комбинации): сеть может указать WTRU выполнить сброс из буфера полезной нагрузки явным образом посредством сигнализации RRC или L1/L2 (например, элемент управления MAC); WTRU может перейти в режим ожидания RRC E-UTRA; WTRU может сменить соту; и/или WTRU может сменить область обнаружения.
[0161] В вариантах осуществления рассматривается одна или несколько структур сигналов для передачи полезной нагрузки. WTRU может передавать и/или принимать полезную нагрузку обнаружения или любой другой тип информации для целей связи от устройства к устройству, среди прочих причин, согласно одному из уже определенных физических каналов восходящей линии связи или нисходящей линии связи. Например, полезная нагрузка может обрабатываться таким же образом, как PUSCH, PUCCH и/или PDSCH.
[0162] WTRU может также передавать (и/или принимать) полезную нагрузку в соответствии с модифицированной обработкой физического канала по сравнению с существующими каналами, возможно, чтобы облегчить реализацию передатчика или приемника. Например, WTRU мог бы передавать полезную нагрузку в соответствии с той же самой обработкой, что и для PUSCH, но этап “преобразования предварительного кодирования” может модифицироваться так, чтобы никакая операция DFT не могла выполняться на модулированных символах до ее применения к входу модулятора OFDM для одного или нескольких или всех символов SC-FDMA. Например, такая модификация может применяться для символов SC-FDMA, несущих информацию (например, возможно, только для таких символов и/или не опорных сигналов). В таких сценариях может не потребоваться коррекции в приемнике, возможно, упрощая обработку в приемнике WTRU.
[0141] В одном или нескольких вариантах осуществления рассматривается одна или несколько последовательных процедур обнаружения в данном ресурсе, основываясь на активации/деактивации. Например, WTRU может принимать конфигурацию на транслируемой системной информации, например, в SIB, специфическом для конфигурации обнаружения D2D. Конфигурация может включать в себя: синхронизацию (тайминг) для распределения ресурсов для сигнала обнаружения, периодического или фиксированного во времени. Например, периодичность ресурса может быть DCycle=100мс со смещением DOffset, и тогда номер субкадра может быть задан как [SFN*10 + номер субкадра] по модулю (DCycle)=DOffset). Например, цикл DCycle может сигнализироваться равным 10, так что цикл может быть точно длиной в один кадр; в соответствующем радиокадре, например, субкадре #5 (соответствующем, например, DCycle=5) может быть событие сигнала обнаружения (возможно, также указывается в конфигурации, например, посредством битовой карты, или задано/известно WTRU); применимый(е) PRB или индекс ресурса (например, в зависимости от типа сигнала) для распределения ресурса для сигнала обнаружения в соответствующем субкадре; SPS-D-RNTI с параметрами для выведения события(й) планирования для сигнала обнаружения. DCI, скремблированный с SPS-D-RNTI, может затем быть использован для активации/деактивации ресурса. Например, периодичность ресурса может быть, например, DCycle=100 мс со смещением DOffset, и тогда номер субкадра может быть задан как [SFN*10 + номер субкадра] по модулю (DCycle)=DOffset). В одном практическом примере, цикл DCycle может сигнализироваться равным 10, так что цикл точно равен длине одного кадра; и/или в соответствующем радиокадре, например, субкадре #5 (соответствующем, например, DCycle=5) может быть событие сигнала обнаружения (возможно, также указывается в конфигурации, например, посредством битовой карты, или задано/известно WTRU).
[0164] В некоторых вариантах осуществления ресурс, выделенный для сигнала обнаружения, может соответствовать субкадру MBSFN, например, тот же самый ресурс может использоваться во множестве сот (например, в области обнаружения) и возникать в одно и то же время. Это обеспечивает возможность RF обнаружения через границы соты координированным образом.
[0165] В некоторых вариантах осуществления WTRU может получать конфигурацию сигнала обнаружения. WTRU может переходить в обнаруживаемое состояние (возможно, запускаемое приложением в WTRU через API) и может запрашивать широковещательную передачу идентификатора в сеть, например, путем передачи сообщения RRC, которое запрашивает ресурсы RF обнаружения для данного идентификатора обнаружения. В некоторых вариантах осуществления обнаруживаемый WTRU может принимать подтверждение запроса посредством сигнализации RRC. Обнаруживаемый WTRU может декодировать PDCCH для SPS-D-RNTI в субкадре, указанном конфигурацией.
[0166] Другие WTRU, которые могут получать конфигурацию сигнала обнаружения, могут иметь задействованную функцию обнаружения (например, возможно, запускаемую приложением в WTRU через API). Такие контролирующие WTRU могут декодировать PDCCH для SPS-D-RNTI в субкадре, указанном конфигурацией. WTRU, который может успешно декодировать PDCCH DCI, скремблированный посредством SPS-D-RNTI, причем DCI может указывать активацию ресурса для соответствующего идентификатора, может определять дальнейшие действия в зависимости от того, является ли WTRU контролирующим WTRU или обнаруживаемым WTRU.
[0167] Обнаруживаемый WTRU может определять, что идентификатор, указанный в DCI, может соответствовать идентификатору, который он послал в запросе обнаружения. Обнаруживаемый WTRU может передавать ACK HARQ в субкадре n+4 при приеме команды активации в субкадре n. Обнаруживаемый WTRU может передавать сигнал обнаружения на ресурсе сигнала обнаружения и/или в субкадре(ах), указанном(ых) конфигурацией сигнала обнаружения, возможно, в некоторых вариантах осуществления, в течение ограниченного времени и/или до следующего события планирования сигнала обнаружения.
[0168] Контролирующий(ие) WTRU может (могут) определять, что идентификатор, указанный в DCI, соответствует требуемому идентификатору. Если это так, то контролирующий(ие) WTRU может (могут) пытаться декодировать любую передачу сигнала обнаружения в ресурсе сигнала обнаружения и/или в субкадре(ах), указанном(ых) конфигурацией сигнала обнаружения. В противном случае, WTRU может (могут) декодировать следующее событие планирования сигнала обнаружения.
[0169] Возможно, если контролирующий WTRU может определять, что он детектировал сигнал обнаружения, то он может выполнять дальнейшие действия, например, сообщать в сеть, инициировать процедуру обнаружения и т.п.
[0170] В следующем событии планирования сигнала обнаружения, WTRU, которые контролируют PDCCH на присутствие SPS-D-RNTI, могут декодировать DCI, указывающий активацию конфигурированного ресурса, либо для того же идентификатора (для RF обнаружения дается больше времени для завершения), либо для другого идентификатора (начинается новая процедура обнаружения, и в этом случае предыдущая процедура завершается). В некоторых вариантах осуществления может приниматься DCI, указывающий деактивацию ресурса для текущей процедуры, что также может завершать процедуру. В некоторых вариантах осуществления срок действия активации может истечь через некоторое время.
[0171] В одном или нескольких вариантах осуществления рассматриваются процедуры последовательного обнаружения на заданном ресурсе на основе запросов запрошенной передачи. WTRU может принимать конфигурацию на транслируемой системной информации, например, в SIB, специфическом для конфигурации обнаружения D2D. Конфигурация может включать в себя синхронизацию для распределения ресурса для сигнала обнаружения, периодического и/или фиксированного во времени. Например, периодичность ресурса может быть DCycle=320 мс со смещением DOffset, и номер субкадра может быть задан как [SFN*10 + номер субкадра] по модулю (DCycle) = DOffset); в соответствующем радиокадре, например, субкадре #5 (соответствующем, например, DCycle=5) может иметься возможность передачи сигнала обнаружения (возможно, также указывается в конфигурации, например, посредством битовой карты, или может быть индексом, заданным/известным WTRU; применимый(е) PRB или индекс ресурса (в зависимости от типа сигнала) для выделения ресурса для сигнала обнаружения в соответствующем субкадре; и/или формат(ы) DCI, контролируемый(е) WTRU, который(е) может (могут) нести запрос передачи сигнала обнаружения. Например, запрос передачи сигнала обнаружения может соответствовать полю длиной N=1, 2, … бит, сигнализируемому как часть формата DCI. Или запрос передачи сигнала обнаружения может кодироваться как набор одной или более хорошо определенных кодовых точек как часть информации, сигнализируемой через формат(ы) DCI к WTRU. Или запрос передачи сигналов обнаружения может соответствовать специальному RNI, например, D-RNTI, когда формат DCI может декодироваться посредством WTRU.
[0172] В некоторых вариантах осуществления WTRU может получать конфигурацию сигнала обнаружения. WTRU может переходить в обнаруживаемое состояние (возможно, запускаемое приложением в WTRU через API) и может запрашивать трансляцию идентификатора в сеть, например, путем передачи сообщения RRC, которое запрашивает ресурсы RF обнаружения для данного идентификатора обнаружения. В некоторых вариантах осуществления обнаруживаемый WTRU может принимать подтверждение запроса посредством сигнализации RRC.
[0173] Обнаруживаемый WTRU может декодировать PDCCH для событий DCI, которые переносят, представляют или иным образом кодируют информацию, соответствующую запросу передачи сигнала обнаружения в субкадре, указанном конфигурацией.
[0174] Другие WTRU, которые могут получать конфигурацию сигнала обнаружения, могут иметь задействованную функцию обнаружения (например, возможно запускаемую приложением в WTRU через API). Такие контролирующие WTRU могут декодировать PDCCH в субкадре(ах), указанном(ых) конфигурацией.
[0175] WTRU, который успешно декодирует DCI, который переносит, представляет или иным образом кодирует информацию, соответствующую запросу передачи сигнала обнаружения, может определять дальнейшие действия в зависимости от того, является ли WTRU контролирующим WTRU или обнаруживаемым WTRU.
[0176] Обнаруживаемый WTRU может передавать АСК HARQ в субкадре n+4 при приеме DCI, несущего запрос передачи сигнала обнаружения в субкадре n.
[0177] Обнаруживаемый WTRU может передавать сигнал обнаружения в ресурсе сигнала обнаружения и в субкадре(ах), указанных конфигурацией сигнала обнаружения. В некоторых вариантах осуществления он может передавать сигнал обнаружения один раз (возможно, только один раз), возможно, для ограниченного числа раз (возможно, только для ограниченного числа раз) и/или как функцию субкадра DL, где был принят запрос, при сравнении со следующим(и) происходящим(и) или разрешенным(и) событием(ями) планирования сигнала обнаружения.
[0178] Контролирующий(е) WTRU может (могут) определять, что идентификатор, указанный в DCI, соответствует требуемому идентификатору. Если это так, то контролирующий(е) WTRU может (могут) пытаться декодировать любую передачу сигнала обнаружения в ресурсе сигнала обнаружения и/или в субкадре(ах), указанном(ых) конфигурацией сигнала обнаружения. В некоторых вариантах осуществления WTRU может (могут) декодировать следующее событие планирования сигнала обнаружения.
[0179] Возможно, если контролирующий WTRU определяет, что он детектировал сигнал обнаружения, то он может выполнять дальнейшие действия, например, сообщать в сеть, инициировать процедуру обнаружения и т.п.
[0180] В вариантах осуществления предполагается, что с использованием одного или нескольких рассматриваемых здесь методов, сигнал(ы) обнаружения и процедуры обнаружения может (могут) эффективно мультиплексироваться даже в присутствии многих устройств, и/или используемые ресурсы передачи в соте или на системном уровне могут быть разнесены во времени и/или может поддерживаться низкая служебная нагрузка.
[0181] В одном или нескольких вариантах осуществления предполагается, что, используя описанные здесь методы, сеть может планировать другие передачи на рассматриваемых ресурсах, возможно, если ресурсы обнаружения не были активированы или при использовании в соответствии с режимом реализации сети.
[0182] Один или несколько вариантов осуществления рассматривают методы для передачи и приема сигнала обнаружения. В вариантах осуществления учитывается, что на высоком уровне процедура обнаружения может затрагивать передачу сигнала обнаружения первым устройством с целью быть обнаруженным вторым устройством. Сигнал обнаружения может использоваться для ряда целей, включающих в себя синхронизацию, измерение мощности, идентификацию и/или потенциально для переноса информации полезной нагрузки.
[0183] В одном или нескольких вариантах осуществления сигнал обнаружения может переноситься на специальном канале, физическом канале от устройства к устройству (PD2DCH). Сигнал может отображаться непосредственно на физические ресурсы, например, подобно зондирующим опорным сигналам. Описанные здесь методы могут применяться к обоим случаям, где сигнал обнаружения может переноситься на PD2DCH или отображаться непосредственно на физические ресурсы. В некоторых вариантах осуществления может предполагаться, что приемопередающий WTRU может быть сконфигурирован для использования надлежащих физических ресурсов.
[0184] В вариантах осуществления рассматривается одна или несколько структур сигналов. Сигнал обнаружения может содержать некоторое количество частей, одна или более или каждая из которых может быть нацелена на выполнение конкретной цели. Следующие части могут быть включены в сигнал обнаружения в любом порядке или комбинации:
- Защитный временной интервал
- Часть синхронизации
- Последовательность обнаружения
- Полезная нагрузка
- Опорные символы.
[0185] В некоторых вариантах осуществления защитный временной интервал может быть или не быть рассматриваемой частью сигнала обнаружения. В некоторых вариантах осуществления опорные символы могут быть или не быть рассматриваемыми частями вне защитных временных интервалов. В некоторых вариантах осуществления опорные символы могут присутствовать в частях синхронизации, последовательности обнаружения и/или полезной нагрузки. Фиг. 2 показывает список примерных возможных концептуальных комбинаций, формирующих сигнал обнаружения. Например, комбинация (a) содержит две части защитных интервалов и часть последовательности обнаружения.
[0186] В некоторых вариантах осуществления, термин “последовательность обнаружения” может использоваться для описания конкретной последовательности символов, которая может использоваться для обнаружения. Этот термин может использоваться взаимозаменяемо с термином “сигнал обнаружения”, как используется здесь, включая то, когда ссылка на сигнал обнаружения может включать или не включать в себя последовательность обнаружения и в некоторых вариантах осуществления синхронизацию, полезную нагрузку и/или защитный временной интервал.
[0187] В некоторых вариантах осуществления может поддерживаться и/или конфигурироваться одна или несколько комбинаций частей сигнала обнаружения (например, формат сигнала обнаружения). Например, WTRU может быть сконфигурирован для поддержки некоторого количества форматов сигнала обнаружения для операций обнаружения в зоне покрытия сети и/или другого набора форматов сигнала обнаружения для операций обнаружения в отсутствие покрытия сети. В другом примере WTRU может быть сконфигурирован с форматами сигнала обнаружения с последовательностью обнаружения и/или полезной нагрузкой, с последовательностью обнаружения без полезной нагрузки или с полезной нагрузкой без последовательности обнаружения.
[0188] В некоторых вариантах осуществления защитная часть (или защитный период, или, эквивалентно, защитный временной интервал) может обеспечивать время, достаточное, чтобы WTRU мог реконфигурировать свое радио для приема/передачи сигнала обнаружения, чтобы избегать перекрытия с другими сигналами и/или чтобы обеспечивать достаточное время для распространения сигналов. В некоторых вариантах осуществления защитные временные интервалы могут не рассматриваться как часть сигнала обнаружения, поскольку во время этих защитных временных интервалов может отсутствовать действительная передача сигнала.
[0189] В некоторых вариантах осуществления защитная часть может быть предназначена для отделения по времени других частей сигнала обнаружения. В таких примерах WTRU может использовать защитный временной интервал для отделения части кода синхронизации от других частей (например, см. фиг. 2 g)-i)). Этот подход может, например, снизить требование к размеру буфера в WTRU и/или обеспечить время для конфигурирования WTRU для контроля последовательности обнаружения и/или полезной нагрузки после детектирования сигнала кода синхронизации (или сигнала обнаружения в случае, где может существовать защитный интервал между последовательностью обнаружения и полезной нагрузкой).
[0190] В одном или нескольких вариантах осуществления рассматривается код синхронизации. В сетях LTE, устройства могут синхронизироваться на восходящей линии связи так, чтобы выравнивать (например, насколько это возможно) символы OFDM UL и/или субкадры в принимающем eNB. Эта синхронизация может быть полезна при поддержании демодуляции OFDM эффективной и для снижения служебной нагрузки, ассоциированной с передачей циклического префикса (CP). Для поддержания синхронизации, eNB может выдавать команды опережения тайминга (TA) в один или более или каждый WTRU, соединенный с ним. Значение TA может зависеть от расстояния от WTRU до соты или более конкретно от времени RF распространения. Когда WTRU в той же самой соте могут быть синхронизированы в eNB, может не иметься опережения тайминга для линии радиосвязи между WTRU, и таким образом, вследствие TA и задержек распространения, WTRU, принимающий сигнал обнаружения, может требовать дополнительных опорных символов для получения синхронизации с сигналом обнаружения.
[0191] В присутствии сетевой инфраструктуры, WTRU может быть синхронизирован с сетью, и, таким образом, окно поиска синхронизации может быть меньше, чем в случае, когда сетевая инфраструктура не присутствует. В некоторых вариантах осуществления может быть полезным обеспечить относительно быструю синхронизацию сигнала обнаружения для улучшения процесса детектирования.
[0192] Сигнал обнаружения может содержать специальный код синхронизации. Этот код синхронизации может использоваться, например, контролирующим WTRU для ускорения и/или упрощения процесса синхронизации. Другое использование для WTRU, принимающего сигнал, может состоять в том, что окно поиска может быть уменьшено, что в результате может упростить детектирование, а также снизить потребление аккумулятора.
[0193] В некоторых вариантах осуществления для включения кода синхронизации в сигнал обнаружения, WTRU может передавать один или несколько кодов синхронизации отдельно (на независимом символе OFDM) от других частей сигнала обнаружения (например, последовательности обнаружения, полезной нагрузки). WTRU может быть сконфигурирован, чтобы передавать код синхронизации в течение символа OFDM, несущего код синхронизации, и в некоторых вариантах осуществления только в течение таких символов OFDM (например, передача других сигналов или информации на другом наборе RB).
[0194] В некоторых вариантах осуществления для включения кода синхронизации в сигнал обнаружения, WTRU может быть сконфигурирован, чтобы мультиплексировать код синхронизации с другой управляющей информацией или информацией данных в пределах заданного символа OFDM. В этом примерном решении WTRU может быть сконфигурирован, например, чтобы передавать код синхронизации на конкретном поднаборе RB и другую управляющую информацию или информацию данных на отдельном (потенциально смежном) поднаборе RB. Эта концепция иллюстрируется, например, на фиг. 2j.
[0195] Код синхронизации может генерироваться посредством WTRU из одной или нескольких предварительно заданных последовательностей (например, явным образом из спецификаций); или с использованием параметризованной последовательности, например, Задова-Чу или псевдослучайной последовательности (например, m-последовательности или последовательности Голда), генерированной с использованием, например, генератора псевдослучайной последовательности.
[0196] WTRU может быть сконфигурирован с параметрами для использования для кода синхронизации, например, посредством сигнализации RRC или предварительно сконфигурированными в WTRU. В некоторых вариантах осуществления, один или несколько параметров последовательности могут определяться, основываясь на локальных параметрах WTRU, таких как идентификатор WTRU, идентификатор соты или другие известные параметры. WTRU, принимающий последовательность, может быть сконфигурирован для слепого поиска кода синхронизации, например, из сокращенного набора кодов синхронизации.
[0197] WTRU может быть сконфигурирован с набором кодов синхронизации, которые могут совместно использоваться одним или более или множеством WTRU, передающими сигналы обнаружения. В некоторых вариантах осуществления WTRU может принимать информацию на наборе кодов синхронизации через SIB. WTRU может дополнительно конфигурироваться для выбора конкретного кода синхронизации среди набора сконфигурированных значений. WTRU может, например, выполнять выбор кода синхронизации в одной или более или каждой передаче сигнала обнаружения. WTRU может быть сконфигурирован для выбора кода синхронизации с использованием одного или нескольких методов, например: в некоторых вариантах осуществления для выбора кода синхронизации WTRU может быть сконфигурирован, чтобы случайно выбирать один из сконфигурированных кодов синхронизации; в некоторых вариантах осуществления для выбора кода синхронизации WTRU может быть сконфигурирован, чтобы выбирать код синхронизации, основываясь на сконфигурированном идентификаторе, например, C-RNTI WTRU. Более конкретно и используя C-RNTI в качестве примера и, возможно, предполагая, что сконфигурировано Nsync кодов, WTRU может выбирать код(ы) синхронизации с индексом sc_index = C-RNTI по модулю Nsync; в некоторых вариантах осуществления WTRU может быть сконфигурирован, чтобы выбирать код(ы) синхронизации, основываясь на идентификаторе соты, с которой он может быть ассоциирован (например, находится в соте в режиме ожидания или соединен с ней в соединенном режиме). Например, WTRU может быть сконфигурирован, чтобы выбирать код синхронизации, основываясь на идентификаторе физического уровня и/или идентификаторе соты физического уровня; и/или в некоторых вариантах осуществления WTRU может быть сконфигурирован, чтобы выбирать код синхронизации, основываясь на службе обнаружения, ассоциированной с сигналом обнаружения. Один или несколько из этих иллюстративных методов для выбора кода(ов) синхронизации, также могут применяться к выбору последовательности(ей) обнаружения.
[0198] В одном или нескольких вариантах осуществления рассматривается последовательность обнаружения. Последовательность обнаружения может быть использована для цели идентификации устройства и/или службы и/или для принимающего WTRU (или, эквивалентно, контролирующего WTRU), чтобы измерять его мощность приема, чтобы сообщать указание близости и/или прямое измерение в сеть/приложение. В некоторых вариантах осуществления последовательность обнаружения также может быть использована для целей синхронизации и/или оценки канала.
[0199] В некоторых вариантах осуществления последовательность обнаружения может быть выведена из других существующих последовательностей, таких как последовательность Задова-Чу или псевдослучайная последовательность (например, m-последовательностей или последовательностей Голда). В некоторых вариантах осуществления WTRU может быть сконфигурирован для использования одного бита/тона на заданном ресурсном элементе (RE) в качестве последовательности обнаружения (в некоторых вариантах осуществления последовательность обнаружения может уже не быть “последовательностью”, однако для простоты представления термин “последовательность” может обобщаться, чтобы также включать в себя подход одного бита/тона). В некоторых вариантах осуществления набор битовых последовательностей может быть определен явным образом в спецификациях. В некоторых вариантах осуществления последовательности обнаружения могут быть индексированы. Индекс последовательности обнаружения может тогда быть привязан к устройству или идентификации службы через ассоциацию более высокого уровня. В одном примере последовательность обнаружения может быть создана со специальными соображениями для устойчивости к частотным смещениям. Варианты осуществления учитывают, что WTRU могут иметь более низкие требования к частотному смещению, чем eNB, что может сделать прием сигнала обнаружения более проблематичным.
[0200] В одном примере индексирования, в случае последовательности Задова-Чу, WTRU может быть сконфигурирован, чтобы индексировать набор последовательностей Задова-Чу, основываясь на известном правиле привязки, например, набора корней и циклических сдвигов к конкретным индексам. Аналогично, псевдослучайные последовательности могут быть параметризованы индексом начального времени и/или значением(ями) инициализации для генератора(ов) случайных последовательностей. Подобную концепцию можно применять, например, к подходу одного тона, где может быть задано правило, ассоциирующее доступный RE для обнаружения с некоторым индексом.
[0201] WTRU может быть сконфигурирован для ассоциирования из спецификаций или через сигнализацию RRC. В одном примере WTRU может быть сконфигурирован через более высокие уровни, чтобы использовать поднабор всех заданных последовательностей обнаружения (или возможно, только все заданные последовательности обнаружения). Этот поднабор может определяться, например, сетью (например, eNB), основываясь на числе сигналов обнаружения, необходимых для конкретной службы/географической области.
[0202] WTRU может быть сконфигурирован сетью, чтобы использовать конкретную последовательность обнаружения (например, через выделенную конфигурацию). WTRU может быть сконфигурирован с набором последовательностей обнаружения для использования, например, посредством SIB и/или выделенной сигнализации RRC. WTRU может быть сконфигурирован для выбора последовательности обнаружения для передачи с использованием, например, одного или нескольких подходов, описанных здесь для выбора кода синхронизации.
[0203] WTRU может быть сконфигурирован, например, чтобы выбирать последовательность(и) обнаружения для передачи, основываясь на выбранном(ых) коде(ах) синхронизации. В некоторых вариантах осуществления WTRU может быть сконфигурирован, чтобы выбирать последовательность обнаружения случайным образом из поднабора сконфигурированного набора используемых последовательностей обнаружения, индексированных кодом синхронизации. Более конкретно, WTRU может определять поднабор последовательностей обнаружения, из которого следует выбирать, основываясь на коде(ах) синхронизации. WTRU может выбирать, например, случайным образом, одну или несколько последовательностей обнаружения, чтобы использовать для передачи, из определенного поднабора последовательностей обнаружения.
[0204] В некоторых вариантах осуществления WTRU может быть сконфигурирован, чтобы выбирать последовательность(и) обнаружения, основываясь на сконфигурированном идентификаторе, например, C-RNTI WTRU. Более конкретно и используя C-RNTI в качестве примера, предполагая, что сконфигурировано Ndisc последовательностей обнаружения, WTRU может выбирать последовательность(и) обнаружения для передачи с индексом ds_index = C-RNTI по модулю Ndisc.
[0205] В некоторых вариантах осуществления создание последовательности обнаружения может зависеть от множества различных факторов. Например, если сразу можно детектировать много последовательностей обнаружения одним WTRU, то может быть полезным выбрать тип последовательности, которую можно относительно легко генерировать на локальном WTRU (например, псевдослучайные последовательности). С другой стороны, может быть полезным поддерживать ортогональность между последовательностями низкой для улучшенных характеристик детектирования. В таких случаях может быть полезным использовать последовательность обнаружения, выведенную из последовательностей нулевой автокорреляции постоянной амплитуды (CAZAC) (например, Задова-Чу), из-за благоприятных свойств автокорреляции. Далее, длина последовательности также может в некоторой степени зависеть от ожидаемой дальности, поддерживаемой для обнаружения. Большая дальность может потребовать длинных последовательностей с соответственно длинным циклическим префиксом для поддержки разнесения задержек распространения и задержки канала. В некоторых случаях (например, последовательностей Задова-Чу), более длинные последовательности могут также позволить выводить более высокое число ортогональных сигналов, что может улучшить масштабируемость метода.
[0206] В некоторых вариантах осуществления WTRU может быть сконфигурирован для передачи последовательности обнаружения с использованием избыточности. Использование избыточности для последовательности обнаружения может расширять дальность (диапазон) обнаружения с использованием, например, той же самой базовой последовательности обнаружения. В одном примере WTRU может быть сконфигурирован с базовой последовательностью обнаружения и может быть сконфигурирован (например, через более высокие уровни или фиксированным способом в спецификациях) для передачи одного или нескольких повторений этой базовой последовательности. Например, WTRU может быть сконфигурирован для повторения базовой последовательности с использованием одного или нескольких из следующих подходов:
- Избыточность частотной области. WTRU может быть сконфигурирован для повторения последовательности в частотной области, то есть, в отдельном наборе RB.
- Избыточность на уровне символов. WTRU может быть сконфигурирован для повторения последовательности во временной области, например, с использованием такой же ширины полосы, но передаваемой на другом наборе символов OFDM.
- Избыточность на уровне субкадров. WTRU может быть сконфигурирован для повторения последовательности во временной области, например, с использованием той же самой ширины полосы, но передаваемой на другом наборе субкадров.
Принимающий WTRU может быть сконфигурирован для накопления энергии в одном или более или всех повторениях для улучшенного детектирования.
[0207] В одном или нескольких вариантах осуществления рассматривается полезная нагрузка обнаружения. Сигнал обнаружения может нести полезную нагрузку обнаружения. Полезная нагрузка обнаружения также может быть защищена в отношении целостности с использованием обычного CRC. Кроме того, для защиты от ошибок канала, полезная нагрузка обнаружения может быть кодирована с использованием метода кодирования, такого как турбо кодирование, сверточное кодирование, блочное кодирование (например, Рида - Мюллера) или другая форма кодирования.
[0208] В одном или нескольких вариантах осуществления рассматривается указание присутствия полезной нагрузки обнаружения. Передающий WTRU может быть сконфигурирован для указания присутствия полезной нагрузки обнаружения в сигнале обнаружения путем использования специального значения последовательности обнаружения или кода синхронизации. Например, передающий WTRU может быть сконфигурирован для выбора кода синхронизации из предварительно заданного набора кодов синхронизации, когда полезная нагрузка обнаружения также передается в том же сигнале обнаружения. Указание может происходить в предыдущем сигнале обнаружения с предварительно заданными правилами синхронизации, возможно, чтобы избежать неопределенности. Такая же концепция также может применяться для последовательности обнаружения, когда WTRU может указывать присутствие последовательности обнаружения. В некоторых вариантах осуществления WTRU может передавать полезную нагрузку в предварительно заданный момент времени после передачи сигнала/последовательности обнаружения (в некоторых вариантах осуществления полезная нагрузка может больше не быть соответствующей частью сигнала обнаружения).
[0209] Полезная нагрузка обнаружения может присутствовать в поднаборе предварительно заданных или сконфигурированных субкадров (или, возможно, только в таком поднаборе). В таких случаях передающий WTRU (или, эквивалентно, обнаруживаемый WTRU) может быть сконфигурирован для передачи полезной нагрузки обнаружения в течение этих субкадров (или, возможно, только в течение этих субкадров).
[0210] Принимающий WTRU может быть сконфигурирован для определения того, присутствует или нет полезная нагрузка обнаружения в сигнале обнаружения. Например, используя пример кода синхронизации, описанный здесь, принимающий WTRU может быть сконфигурирован для определения присутствия полезной нагрузки обнаружения посредством определения кода последовательности и того, принадлежит ли он или нет поднабору, указывающему присутствие полезной нагрузки обнаружения. В этом примере WTRU может пытаться детектировать один или несколько кодов синхронизации из различных поднаборов и затем определять (например, с использованием порога) набор присутствующих кодов синхронизации и для одного или более или каждого случая детектирования определять, несет или нет ассоциированный сигнал обнаружения полезную нагрузку обнаружения. Подобный подход также рассматривается при использовании последовательности обнаружения.
[0211] В некоторых вариантах осуществления принимающий WTRU может определять, что полезная нагрузка обнаружения присутствует, при детектировании сигнала/последовательности обнаружения. WTRU может быть сконфигурирован, чтобы пытаться декодировать полезную нагрузку после предварительно заданного момента времени после детектирования сигнала/последовательности обнаружения.
[0212] В некоторых вариантах осуществления принимающий WTRU может быть сконфигурирован, чтобы определять потенциальное присутствие полезной нагрузки обнаружения путем определения того, может или нет текущий субкадр обеспечить возможность передачи полезной нагрузки обнаружения. Принимающий WTRU может быть сконфигурирован, чтобы пытаться декодировать полезную нагрузку обнаружения в таких субкадрах. В одном альтернативном подходе WTRU может пытаться определять потенциальное присутствие полезной нагрузки, возможно, если сигнал, ассоциированный с этим устройством, выше некоторого порога.
[0213] Принимающий WTRU может быть сконфигурирован, чтобы определять целостность полезной нагрузки с использованием CRC. В случае, когда проверка CRC проходит, WTRU может быть сконфигурирован, чтобы доставлять данные полезной нагрузки на более высокие уровни (которые могут включать в себя приложения). WTRU может быть сконфигурирован, чтобы указывать более высоким уровням, что полезная нагрузка обнаружения не была успешно детектирована, в случае, когда проверка CRC не проходит.
[0214] В некоторых вариантах осуществления рассматривается обработка модуляции, кодирования и повторной передачи полезной нагрузки обнаружения. В одном или нескольких вариантах осуществления WTRU может быть сконфигурирован для передачи или приема с фиксированным размером полезной нагрузки обнаружения и/или ассоциированной схемой модуляции и кодирования. Конфигурация может быть фиксированной в спецификациях или полу-статической или приниматься через сигнализацию более высокого уровня (например, сигнализацию RRC).
[0215] В некоторых вариантах осуществления WTRU может быть сконфигурирован для передачи или приема с динамическим размером полезной нагрузки обнаружения и с потенциально другой схемой модуляции и кодирования. В одном примере WTRU может быть сконфигурирован с одним или несколькими различными размерами полезной нагрузки обнаружения (и ассоциированными схемами модуляции и кодирования). Передающий WTRU может выбирать размер полезной нагрузки обнаружения, например, основываясь на количестве данных, принятых от более высоких уровней, которые должны переноситься полезной нагрузкой обнаружения. В одном примере различные размеры полезной нагрузки обнаружения и ассоциированные схемы модуляции и кодирования могут быть индексированными (например, индексом полезной нагрузки обнаружения) из известной таблицы.
[0216] В некоторых вариантах осуществления передающий WTRU может указывать индекс полезной нагрузки обнаружения явным образом в части управления, ассоциированной с полезной нагрузкой обнаружения (например, часть управления может предшествовать части данных полезной нагрузки обнаружения и не кодироваться таким же способом). Принимающий WTRU может тогда определять действительный размер полезной нагрузки обнаружения и ассоциированную с ним схему модуляции и кодирования путем детектирования части управления полезной нагрузки обнаружения.
[0217] В некоторых вариантах осуществления принимающий WTRU может выполнять слепое декодирование на ограниченном наборе возможных размеров полезной нагрузки и/или схем модуляции.
[0218] В некоторых вариантах осуществления передающий WTRU может быть сконфигурирован с ассоциацией между индексом полезной нагрузки обнаружения и кодом синхронизации, последовательностью обнаружения или обоими. Тогда передающий WTRU может быть сконфигурирован для выбора кода синхронизации и/или последовательности обнаружения, основываясь на индексе полезной нагрузки обнаружения. Принимающий WTRU может определять размер полезной нагрузки обнаружения и/или ассоциированную схему модуляции и кодирования путем детектирования сначала кода синхронизации и/или последовательности обнаружения.
[0219] Передающий WTRU может быть сконфигурирован для передачи одинаковых данных полезной нагрузки обнаружения более одного раза для улучшения надежности. В одном подходе передающий WTRU может повторно передавать одинаковые закодированные биты для одной или более или каждой повторной передачи. В одном примере повторная передача может динамически планироваться сетью или основываться на периодической структуре, сконфигурированной сетью. В другом подходе передающий WTRU может повторно передавать другой набор закодированных битов, например, используя правила инкрементной избыточности, подобные таковым в существующих спецификациях. План версии избыточности может быть предварительно определен (например, на основе индекса субкадра или другой временной переменной) или динамически планироваться явным образом сетью.
[0220] В некотором варианте осуществления передающий WTRU может применять скремблирование к части полезной нагрузки обнаружения. В вариантах осуществления рассматривается потенциально большое число передающих WTRU. В одном примере код или параметр скремблирования может зависеть от одного или более из следующего: код синхронизации, индекс последовательности обнаружения, ID соты (соты, в которой расположен WTRU или к которой он прикреплен), идентификатор WTRU (например, RNTI, IMSI или другой идентификатор) и/или идентификатор службы (например, как конфигурировано или ассоциировано сетью).
[0221] В одном или нескольких вариантах осуществления рассматривается контент полезной нагрузки. Передающий WTRU может быть сконфигурирован для передачи информации на полезной нагрузке. Передающий WTRU может, например, передавать одно или более из следующей информации в полезной нагрузке: статус устройства: например, занят, открыт для запроса соединения; в зоне охвата или вне ее и т.д.; измерение(я) датчика (например, информация, относящаяся к устройству (например, уровень батареи WTRU; температура WTRU); отсчеты подсоединенных аксессуаров (например, уровень кислородного бака (например, у пожарника); качество наружного воздуха (например, уровень СО2 и т.д.); уровень топлива; информация об окружающей среде: температура, влажность и т.п.; информация, относящаяся к пользователю (например, частота пульса; уровень кислорода крови или другая информация; давление; температура тела; уровень сахара и т.п.)); статус кластера: например, в применении общественной безопасности, главный WTRU кластера может обеспечивать информацию о своем кластере (число WTRU, текущая нагрузка трафика и т.п.). Информация, переносимая на полезной нагрузке, может быть сконфигурирована сетью или быть специфической для приложения. WTRU может быть сконфигурирован с набором предварительно заданных размеров полезной нагрузки и ассоциированных полей (например, формат полезной нагрузки). В одном примере передающий WTRU может быть сконфигурирован с конкретным форматом полезной нагрузки, и принимающий WTRU может быть сконфигурирован для слепого детектирования формата из конечного списка возможных поддерживаемых форматов.
[0222] При детектировании полезной нагрузки принимающий WTRU может быть сконфигурирован, чтобы сообщать о контенте полезной нагрузки на более высокие уровни (например, в приложение и т.п.). В одном подходе корректный прием полезной нагрузки может запускать передачу принимающим WTRU отчета в сеть, например, указывающего корректный прием и сообщающего дополнительные измерения и/или значения, содержащиеся в полезной нагрузке.
[0223] В одном или нескольких вариантах осуществления рассматривается отображение на физические ресурсы и опорные символы. В одном или нескольких вариантах осуществления рассматривается отображение сигнала обнаружения на физические ресурсы. В одном или нескольких вариантах осуществления рассматривается отображение сигнала(ов) обнаружения D2D на физические ресурсы.
[0224] В некоторых вариантах осуществления сигнал обнаружения из одного или нескольких сигналов обнаружения от множества пользователей может передаваться в выделенной части субкадра, назначенного и сконфигурированного как событие передачи для сигналов обнаружения D2D. Выделенная часть, несущая сигналы обнаружения, может удовлетворять принципам проектирования, описанным здесь, например, путем присвоения подходящих защитных периодов (во временной области) и/или защитных областей (в частотной области), которые могут обеспечить возможность беспрепятственной передачи и приема даже в присутствии неопределенности синхронизации и/или неточности генератора.
[0225] На фиг.3 для иллюстрации принципов действия показаны два примерных варианта осуществления, использующих субкадр UL, в случае системной BW UL, равной 5 МГц.
[0226] В первом примере сигнал обнаружения может передаваться в субкадре, назначенном или сконфигурированном как возможность передачи для обнаружения D2D как в виде одиночной возможности Tx (левая сторона фиг. 3). В этом случае последовательность сигналов обнаружения занимает 19 RB, оставляя при этом по 180 кГц слева и справа от занятой BW в качестве частотного защитного интервала. Один символ OFDM, предшествующий, и один символ OFDM, следующий за форматом передачи действительного сигнала обнаружения, оставлен в качестве защитного временного интервала. Возможно, что один WTRU передает свой сигнал обнаружения, используя эти зарезервированные ресурсы. Возможно также, что множество WTRU передают свои соответственные сигналы обнаружения на назначенных ресурсах посредством рациональной структуры сигнала, обеспечивающей возможность одновременной корреляции и/или детектирования присутствия таких сигналов контролирующими WTRU.
[0227] В этом примере должно быть понятно, что сигнал обнаружения может состоять из множества компонентов, таких, как описаны выше, например, он может состоять либо из одного, либо из комбинации сигналов синхронизации, последовательностей сигналов обнаружения, полезной нагрузки, несущей данные, и/или последовательностей пилот-сигналов.
[0228] Занятая сигналом обнаружения ширина полосы (BW) может варьироваться как функция доступной системной BW. Например, WTRU может определять применимую BW передачи сигнала обнаружения как функцию любого выбранного параметра или их комбинации, таких как системная BW, размер PDCCH или зарезервированной области и/или сигнализированная или конфигурированная BW передачи. Аналогично, если сигнал обнаружения занимает поднабор системной BW (возможно, только такую BW), то центральная BW для передачи сигнала обнаружения может либо конфигурироваться как часть параметров передачи, либо подчиняться правилам выделения, как описано здесь.
[0229] Во втором примере (правая часть фиг. 3), возможно, существует более одной назначенной возможности передачи для обнаружения D2D на один субкадр. Емкость мультиплексирования для сигналов обнаружения D2D может быть увеличена, что может быть полезно для систем TDD, где может быть доступно ограниченное число субкадров UL. Первый WTRU может передавать свой сигнал обнаружения в области 1, тогда как второй WTRU может передавать свой сигнал обнаружения в области 2. Аналогично первому примеру, можно варьировать занятую BW как функцию параметров, влияющих на размер и число доступных возможностей передачи D2D сигналов в заданном субкадре. Как в первом примере, возможно, что множество WTRU передают свои соответственные сигналы обнаружения в данной назначенной области обнаружения D2D посредством рациональной структуры сигнала, обеспечивающей возможность одновременной корреляции и/или детектирования присутствия таких сигналов контролирующим(и) WTRU. Когда поддерживается множество возможностей передачи обнаружения D2D на один субкадр, возможности Tx для каждой области обнаружения D2D могут выделяться сначала по времени и затем по частоте. Это может быть полезным, если временное мультиплексирование недостаточно для поддержки всех возможностей конфигурации D2D, необходимых для некоторого значения DRA плотности без перекрытия во времени. Для иллюстрации этого принципа, когда заданная область сигнала обнаружения D2D занимает BW передачи 6 RB, частотное мультиплексирование множества таких областей D2D может быть задано выражением:
где 



[0230] WTRU может быть сконфигурирован, чтобы выбирать набора PRB для использования в передаче обнаружения. В некоторых вариантах осуществления WTRU может быть сконфигурирован для передачи (и/или приема) сигнала обнаружения предварительно заданной ширины полосы 

[0231] Передающий WTRU может быть сконфигурирован, чтобы выбирать область D2D из набора областей D2D, доступных на основе одного или более из следующих методов: WTRU может быть сконфигурирован с конкретной областью D2D (например, для конкретного сигнала обнаружения) и может передавать сигнал обнаружения в этой области D2D; и/или WTRU может быть сконфигурирован для чередования областей D2D, например, при передаче сигнала обнаружения. Этого можно достигнуть, например, с использованием предопределенной последовательности скачкообразного изменения или, например, основываясь на случайном выборе. В примере подхода случайного выбора WTRU может быть сконфигурирован для инициализации начального числа генератора псевдослучайных чисел (например, генератора m-последовательности) с использованием, например, идентификатора, ассоциированного с WTRU (например, C-RNTI или идентификатора D2D).
[0232] В одном или нескольких вариантах осуществления рассматривается одновременная передача сигнализации управления и D2D. В некоторых вариантах осуществления отображение сигнала(ов) обнаружения в субкадре(ах), назначенном(ых) или конфигурированном(ых) в качестве возможности передачи для обнаружения D2D, может позволить одновременную передачу управляющих сигналов, таких как PUCCH. Планирование DL и соответствующая им A/N передача в субкадрах UL может оставаться беспрепятственной посредством конфигурирования и действительного использования ресурсов UL, доступных для служб D2D. Даже унаследованные WTRU, которые не поддерживают D2D, могут все же планироваться в субкадре n-4 DL, возможно, если субкадр n UL сконфигурирован как возможность передачи для WTRU, поддерживающих D2D. Способность частотного мультиплексирования управляющих сигналов, таких как PUCCH, с параллельными передачами сигналов обнаружения в том же субкадре может поддерживаться (и возможно гарантироваться) до тех пор, пока форматы сигналов могут позволить достаточное защитное разнесение.
[0233] В одном примере возможность передачи для сигналов обнаружения может быть сконфигурирована или выделена первому WTRU. Этот WTRU может передавать сигнал обнаружения в субкадре n, тогда как второй WTRU, который принимает данные DL в субкадре n-4, может передавать PUCCH, несущий A/N во внешней области PUCCH BW.
[0234] В другом примере WTRU, поддерживающий параллельную передачу первого сигнала обнаружения D2D и второго сигнала PUCCH в том же самом субкадре, может передавать оба сигнала одновременно.
[0235] В одном или нескольких вариантах осуществления рассматривается скремблирование. В некоторых вариантах осуществления передача сигнала обнаружения или его части может скремблироваться посредством кода скремблирования, специфического для соты или службы. Помехи, воспринимаемые во время демодуляции и декодирования такого передаваемого сигнала, могут усредняться и/или рандомизироваться.
[0236] Например, для передачи сигнала обнаружения WTRU может инициализировать генератор последовательностей скремблирования с


[0237] Параметр q может относиться к уровню передачи. В некоторых вариантах осуществления WTRU может использовать один уровень для передачи сигнала обнаружения, который может соответствовать фиксированному значению, например, q=0. В контексте обнаружения с распределением ресурсов обнаружения, не специфическим для WTRU, варианты осуществления учитывают, что множество устройств могут передавать одновременно на одних и тех же ресурсах. В таких и других сценариях для WTRU может быть полезным использовать различные последовательности скремблирования, чтобы отбеливать помехи. Варианты осуществления также учитывают, возможно, с точки зрения контролирующего WTRU, что выполнение слепого детектирования последовательности скремблирования (например, даже из малого поднабора значений) может требовать большого объема вычислений.
[0238] Варианты осуществления предлагают один или более методов для скремблирования, которые могут обеспечить специфическое для WTRU скремблирование, возможно без подразумеваемой сложности для контролирующего WTRU. В таких и других сценариях, WTRU, передающий сигнал обнаружения, может быть сконфигурирован, чтобы основывать инициализацию генератора последовательности скремблирования на параметре, который может быть ассоциирован и/или выведен из одной или более специфических для WTRU последовательностей, которые могут передаваться на сигнале обнаружения, таких как код синхронизации, последовательность обнаружения и/или другая последовательность пилот-сигнала и т.п.
[0239] В некоторых вариантах осуществления WTRU может быть сконфигурирован для инициализации генератора скремблирования, используя следующую формулу:

где nUE - параметр, специфический для WTRU, который может быть выведен из параметров сигнала обнаружения. Например, nUE представляет собой битовую последовательность длиной 16 битов, которая может быть конкатенацией одного или нескольких битовых значений, включающих в себя, например: идентификатор, известный для одного или более или всех контролирующих WTRU; этот идентификатор может быть сконфигурирован для данной службы и/или может быть общим для одного или более или всех WTRU в соте (например, транслируемым на SIB); индекс, ассоциированный с параметром сигнала обнаружения, специфическим для WTRU, например, один или более из индекса кода синхронизации, индекса последовательности обнаружения и/или индекса последовательности (пилот-сигнала) DMR.
[0240] Также в качестве примера, WTRU может быть сконфигурирован с общим 16-битовым идентификатором (например, через SIB) для nUE и может использовать параметр сигнала, специфический для WTRU, заменяющий параметр ns в вышеприведенной формуле скремблирования.
[0241] Контролирующий WTRU может определять последовательность инициализации генератора скремблирования путем определения одного или более из следующего (в любом порядке): ID соты сигнала обнаружения (например, он может переноситься посредством ресурсов D2D, назначенных одной или более или каждой конкретной соте и/или через ассоциирование кода синхронизации/последовательности обнаружения с ID конкретной соты); параметры сигнала обнаружения, такие как индекс кода синхронизации, индекс последовательности обнаружения и/или индекс пилот-сигналов демодуляции. WTRU может определять значение nUE путем конкатенации релевантного параметра сигнала обнаружения с конфигурированным идентификатором. WTRU может определять значение ns, основываясь на детектированных параметрах сигнала обнаружения; и/или в некоторых вариантах осуществления, если это полезно, WTRU может определять номер временного интервала в радиокадре, ns, например, путем ассоциирования представляющего интерес сигнала с его исходной сотой. В таких сценариях, среди прочих, WTRU может получать временные характеристики ассоциированной соты. В некоторых вариантах осуществления передающие и/или принимающие WTRU могут конфигурироваться, например, для использования фиксированного значения ns (например, ns=0) для скремблирования сигналов обнаружения и/или для улучшения дальности сигнала обнаружения за пределами его собственной соты.
[0242] В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения значения инициализации генератора скремблирования, основываясь, например, на предварительно сконфигурированных значениях по умолчанию и/или значениях, сохраненных в USIM WTRU, возможно в сценариях, где WTRU может находиться вне зоны покрытия сети. WTRU может определять временные характеристики кадра и/или номера временных интервалов из сигнала синхронизации главного узла кластера (CH).
[0243] В одном или нескольких вариантах осуществления рассматривается Тх разнесение. В некоторых вариантах осуществления устройства, которые поддерживают передачи сигналов обнаружения из более чем одного антенного порта, могут использовать схему передачи с Тх разнесением для этих сигналов D2D. Устойчивость линии связи для передаваемого сигнала обнаружения или его частей может быть улучшена, приводя к увеличенной дальности обнаружения. При условии, что обратная связь из принимающего WTRU может не предполагаться доступной для передающего WTRU, для передачи сигналов обнаружения могут подходить схемы передачи с множеством антенн в открытом контуре, такие как Tx разнесение или подобные схемы.
[0244] В некоторых вариантах осуществления передающий WTRU, поддерживающий N=2 антенных порта, может чередовать передачи сигнала обнаружения между последовательными событиями возможностей передачи сигналов D2D между доступными антенными портами. Например, в первом субкадре #5 кадра #1 он может использовать первый антенный порт, в следующем субкадре #5 кадра #2 следующей возможности передачи D2D он может использовать второй антенный порт.
[0245] В некоторых вариантах осуществления передающий WTRU, поддерживающий N=2 антенных порта, может одновременно передавать сигнал обнаружения или его части, используя схему блочного кодирования. Для иллюстрации и в качестве примера, используемая схема передачи может представлять собой SFBC или STBC, где символы, RE или назначенные части сигнала обнаружения могут подвергаться блочному кодированию и затем отображаться на доступные N=2 антенных порта.
[0246] В некоторых вариантах осуществления передающий WTRU, поддерживающий N=2 антенных порта, может одновременно передавать сигнал обнаружения или его части, используя различные наборы частотно-временных ресурсов для каждого антенного порта в данной возможности передачи D2D. Для иллюстративных целей, первая область или код или индекс ресурса последовательности обнаружения могут быть использованы для передачи сигнала обнаружения из первого антенного порта, и вторая область или код или индекс ресурса последовательности обнаружения могут быть использованы для передачи сигнала обнаружения из второго антенного порта.
[0247] В некоторых вариантах осуществления передающий WTRU, поддерживающий N=2 антенных порта, может передавать сигнал обнаружения из первого антенного порта, при этом передавая задержанный по времени или подстроенный по фазе сигнал обнаружения из второго антенного порта.
[0248] Вышеупомянутые варианты осуществления могут быть распространены на более чем N=2 антенны и на одну или более или все описанные схемы передачи для множества антенн с временной коммутацией, с блочным кодированием или с ортогональным назначением ресурсов. Кроме того, необязательно, чтобы использование передачи с множеством антенн было известно принимающему WTRU. Например, для разнесения антенн с временной коммутацией, принимающий WTRU может не знать, что эти передачи исходят из 2 различных антенных портов, например, он может просто воспринимать более высокую степень разнесения при декодировании сигнала. В других примерах, таких как схемы множества антенн с блочным кодированием, структура сигнала обнаружения или его частей может обеспечить возможность того, что различные последовательности пилот-сигналов или оценивания канала или индексы могут допускать раздельную демодуляцию и рекомбинацию сигнала обнаружения, посылаемого с использованием более одного антенного порта посредством передающего устройства.
[0249] В некоторых вариантах осуществления использование множества антенн в открытом контуре или схемы передачи с Tx разнесением может конфигурироваться в передающем WTRU с использованием сообщений сигнализации, таких как RRC и DCI. Например, сеть в качестве части сигнализации конфигурации для передач D2D конфигурирует передающий WTRU, чтобы использовать или не использовать Tx разнесение в случае, когда устройство поддерживает передачу с множеством антенн. Аналогично, использование множества антенн в открытом контуре или схемы передачи с Tx разнесением может сигнализироваться в принимающее устройство посредством использования сообщений сигнализации, таких как RRC и DCI, чтобы позволить принимающему WTRU конфигурировать свой приемник соответственно для целей оценки канала и рекомбинации при демодуляции принятого сигнала обнаружения. В некоторых вариантах осуществления структура последовательности сигнала обнаружения или его части может обеспечить возможность определения явным образом посредством принимающего WTRU, может ли использоваться передача с множеством антенн в открытом контуре в данной передаче сигнала обнаружения или нет. В целях иллюстрации и в качестве примера, передача сигнала обнаружения из различных антенных портов может распознаваться принимающим WTRU посредством использования различных последовательностей скремблирования, различных значений последовательности и/или различных индексов ресурсов как части сигнала обнаружения.
[0250] В одном или более вариантах осуществления рассматриваются опорные символы. Опорные символы могут быть использованы для целей оценки канала, например, для корректной демодуляции полезной нагрузки обнаружения или для других измерений (например, RSRP). Передающий WTRU может быть сконфигурирован для передачи опорных символов вместе с одной или несколькими частями сигнала обнаружения. Например, передающий WTRU может быть сконфигурирован для передачи опорных символов в части полезной нагрузки, но не в других частях. WTRU может быть сконфигурирован для передачи опорных символов вместе с последовательностью обнаружения.
[0251] В некоторых вариантах осуществления принимающий WTRU может быть сконфигурирован для измерения качества опорных символов и сообщения измерения в сеть (например, RSRP, CQI и другое). В некоторых вариантах осуществления принимающий WTRU может сообщать измерение качества канала обратно в передающий WTRU при подготовке для непосредственной связи.
[0252] В некоторых вариантах осуществления принимающий WTRU может использовать опорные символы для демодуляции полезной нагрузки обнаружения.
[0253] В одном или нескольких вариантах осуществления рассматриваются один или несколько методов для передачи опорных символов. В одном или нескольких вариантах осуществления для передачи опорных символов WTRU может передавать опорные символы в одном или нескольких предопределенных конкретных символах OFDM во время передачи сигнала обнаружения. Набор символов OFDM, на которых имеет место передача опорных символов, может быть предварительно определен. Набор символов OFDM может зависеть от параметра, ассоциированного с сигналом обнаружения (или идентифицирующего его), такого как индекс или идентификатор. В этом подходе символ OFDM, несущий опорный сигнал, может нести опорный сигнал и возможно больше никакой другой информации данных/управления. Эта концепция иллюстрируется на фиг.4, где два символа в сигнале обнаружения выделены опорным символам (здесь в качестве примера четвертый символ первого временного интервала и первый символ второго временного интервала). В этом примере, сигнал обнаружения имеет два защитных периода и некоторое число символов, которые могут быть использованы для передачи одной или нескольких частей сигнала обнаружения, обсужденных выше, то есть последовательности обнаружения, полезной нагрузки, части синхронизации, перерыв передачи (DTX) и т.п.
[0254] В некоторых вариантах осуществления для передачи опорных символов WTRU может быть сконфигурирован, чтобы передавать опорные символы вместе с содержимым сигнала обнаружения. В этом подходе символ OFDM, несущий сигналы обнаружения, может также нести опорные символы. Эта концепция иллюстрируется на фиг. 5, где три символа несут опорные символы на некоторых поднесущих, а также другие данные на других поднесущих. В примере на фиг. 5 четвертый и седьмой символ в первом временном интервале и третий символ во втором временном интервале несут опорные символы, мультиплексированные с другой информацией. Опорные символы могут мультиплексироваться с другими данными, такими как последовательность обнаружения, последовательность синхронизации, полезная нагрузка (данные) или даже перерыв передачи (DTX). Подобным образом, другие символы OFDM, свободные от опорных символов (символы 5 и 6 в первом временном интервале и символы 1, 2, 4 и 5 во втором временном интервале в этом примере) также могут нести одно или более из последовательности обнаружения, последовательности синхронизации, полезной нагрузки (данных) или даже перерыва передачи (DTX).
[0255] В вариантах осуществления рассматриваются один или несколько методов для генерации опорных символов. Действительная последовательность опорных символов может генерироваться посредством WTRU, основываясь на одном или нескольких из следующих подходов: последовательность Задова-Чу (ZC); PN-последовательность (например, m-последовательность, последовательность Голда или другие); предопределенная последовательность (например, фиксированная в спецификациях).
[0256] В некоторых вариантах осуществления любая ZC, PN- последовательность или другие могут нуждаться в параметризации или инициализации с использованием конкретного набора из одного или нескольких значений. Для опорного символа, для определения инициализации/параметров опорной последовательности, WTRU может использовать один или более из следующих элементов: C-RNTI WTRU; ассоциированный D-RNTI; ID соты eNB; набор выделенных параметров, указанных в сообщении RRC; параметры, указанные в SIB; и/или параметр, ассоциированный с сигналом обнаружения или идентифицирующий его, такой как индекс. Этот параметр может быть указан посредством сигнализации физического уровня или сконфигурирован посредством сигнализации более высокого уровня.
[0257] В одном примере, основанном на последовательности ZC, WTRU может определять длину последовательности ZC на основе ширины полосы сигнала обнаружения, например, как сконфигурировано сетью или как зафиксировано в спецификациях (например, для каждой возможной ширины полосы сигнала обнаружения). Корень последовательности ZC и/или циклический сдвиг могут определяться, основываясь на операции по модулю с D-RNTI.
[0258] В некоторых вариантах осуществления WTRU может быть сконфигурирован с одним или более из следующих параметров: максимальное число доступных корневых последовательностей ZC; список разрешенных корневых последовательностей ZC; список разрешенных циклических сдвигов (для каждого разрешенного корня ZC или общий для всех корней ZC); максимальное число циклических сдвигов на один корень ZC; минимальное расстояние циклического сдвига; и/или максимальное число последовательностей, доступных для использования.
[0259] WTRU может дополнительно определять максимальное число последовательностей ZC, которые могут быть доступны (например, в случае, когда они конфигурированы неявным образом), на основе одного или нескольких вышеупомянутых параметров. Например, WTRU может определять число доступных последовательностей ZC на основе числа (например, максимального числа) корней и числа доступных циклических сдвигов на один корень ZC. WTRU может дополнительно определять действительный индекс последовательности ZC для использования на основе ассоциированного D-RNTI, например, используя операцию по модулю, следующим образом:
SequenceIndex = (D-RNTI) по модулю (максимальное число доступных последовательностей ZC) (4)
Затем WTRU может определять корень и циклический сдвиг из индекса последовательности Sequencelndex (например, с использованием сконфигурированных параметров и известного соотношения в спецификациях).
[0260] В другом примере, основанном на PN-последовательности, PN-последовательность может инициализироваться на основе D-RNTI. Например, и в зависимости от размера требуемой последовательности инициализации, для инициализации может использоваться часть D-RNTI или расширенный D-RNTI (например, круговое расширение).
[0261] В вариантах осуществления рассматривается один или несколько методов для сигнала обнаружения. В некоторых вариантах осуществления, для сигнала обнаружения, как иллюстрируется на фиг.6, WTRU может быть сконфигурирован для передачи сигнала обнаружения, который может включать в себя ряд символов OFDM, несущих одно или более из следующего:
• Первый защитный период (например, в начале);
• Часть содержимого, несущая одно или более из следующего:
- Опорные символы;
- DTX;
- Последовательность обнаружения и/или
- Полезная нагрузка
• Сигнал синхронизации и/или
• Другая часть содержимого, несущая одно или более из следующего:
- Опорные символы;
- DTX;
- Последовательность обнаружения и/или
- Полезная нагрузка
[0262] Например, WTRU может быть сконфигурирован для передачи последовательности обнаружения в первой части содержимого и/или полезной нагрузки во второй части содержимого.
[0263] WTRU может быть сконфигурирован для передачи опорных символов в том же местоположении, что и CRS нисходящей линии связи. Это может упростить реализацию приемника WTRU.
[0264] В некоторых вариантах осуществления WTRU может быть сконфигурирован со специальным форматом сигнала обнаружения, несущим полезную нагрузку и, возможно, без последовательности обнаружения. Этот специальный формат может включать в себя один или несколько из следующих элементов: защитный период (начало); опорные символы; полезная нагрузка и/или защитный период (конец). В некоторых вариантах осуществления, опорные символы могут быть использованы для демодуляции полезной нагрузки.
[0265] В некоторых вариантах осуществления WTRU может быть сконфигурирован со специальным форматом сигнала обнаружения для использования в отсутствие покрытия сети. Например, этот специальный формат сигнала обнаружения может включать в себя регулярный формат сигнала обнаружения с добавлением, например, одного или более из следующих элементов: дополнительные защитные поднесущие для учета возможных ошибок частотной синхронизации; и/или дополнительные опорные символы для улучшенной синхронизации.
[0266] В вариантах осуществления рассматривается один или более методов для определения формата сигнала обнаружения.
[0267] Один или несколько вариантов осуществления предполагают, что WTRU может быть сконфигурирован для определения формата сигнала обнаружения для использования (либо для передачи, либо для приема/контроля) на основе одного или более измерений.
[0268] В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения того, может ли он находиться в зоне покрытия сети LTE или нет, и может определять подходящий формат сигнала обнаружения (или другой связанный параметр) для использования. Это применимо, например, к WTRU, которые могут конфигурироваться с операциями общественной безопасности (PS). В одном примере, WTRU может определять, что он находится вне зоны покрытия, если удовлетворяется один или несколько следующих факторов в любом порядке или комбинации (один или более или все факторы могут дополняться использованием таймера): WTRU может быть PS WTRU; WTRU мог не найти соту путем измерений PSS/SSS до истечения предопределенного времени; для WTRU могло быть не разрешено базироваться в любой соте (например, никакая из найденных сот не оказалась подходящей); и/или WTRU мог не найти соту для базирования в течение определенного времени.
[0269] В сценариях, в которых WTRU может определять, что он находится вне зоны покрытия, WTRU может определять формат сигнала обнаружения и/или параметры передачи, которые могут быть использованы, на основе одного или более из следующего (в любом порядке или комбинации): на основе конфигурации USIM; на основе предварительно заданного формата, например, в спецификациях; и/или на основе конфигураций более высокого уровня.
[0270] Когда WTRU может определять, что он может находиться в зоне покрытия сети, WTRU может быть сконфигурирован, чтобы выполнять операции обнаружения, после того, как это было указано сетью (например, возможно только после того, как это было указано), например, посредством конфигураций RRC. Например, WTRU может выполнять одну или более из следующих задач: WTRU может соединяться с сетью и передавать свои функциональные возможности посредством сигнализации RRC; WTRU может принимать из сети данные синхронизации и опережение тайминга; WTRU может принимать из сети параметр/конфигурацию обнаружения или непосредственной связи, например, через сигнализацию RRC/SIB; и/или WTRU может применять конфигурацию и/или выполнять действия обнаружения согласно конфигурации.
[0271] В некоторых вариантах осуществления WTRU может быть сконфигурирован для выполнения контроля обнаружения, основываясь на конфигурации, сохраненной или в USIM для конкретной PLMN, и/или основываясь на уровне приложения. WTRU может определять один или несколько параметров обнаружения для контроля (например, выполнения открытого обнаружения), например, из SIB. В одном примере WTRU может быть сконфигурирован, чтобы не передавать никакого сигнала обнаружения в режиме ожидания RRC E-UTRA.
[0272] В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения параметров соты и для выбора формата сигнала обнаружения, основываясь на одном или нескольких измерениях одного или нескольких параметров соты. Например, WTRU может быть сконфигурирован для использования конкретного формата сигнала обнаружения, основываясь на конфигурации PRACH (например, основываясь на формате преамбулы PRACH, на индексе конфигурации PRACH или другом параметре, связанном с PRACH). Это может быть полезным по меньшей мере по причине того, что конфигурация PRACH может быть связана с размером соты и в некоторых вариантах осуществления, возможно, с желательной дальностью сигнала обнаружения.
[0273] В вариантах осуществления рассматривается один или несколько методов для определения из сигнала обнаружения идентификатора службы и/или устройства. В некоторых вариантах осуществления идентификация устройства, передающего сигнал, может выполняться явным образом, например, посредством передачи идентификатора в части полезной нагрузки, или неявным образом, например, через последовательность обнаружения. Например, набор последовательностей обнаружения может быть упорядочен и/или проиндексирован. Тогда идентификатор устройства может быть привязан к последовательности обнаружения. Эта ассоциация может быть явной, например, основанной на сетевой конфигурации (например, передающий WTRU может быть сконфигурирован сетью для использования конкретной последовательности обнаружения), или неявной, например, основанной на других известных параметрах WTRU, например, IMEI или C-RNTI или другом.
[0274] В некоторых вариантах осуществления идентификатор службы, ассоциированный с сигналом или процессом обнаружения, также может передаваться явным образом или привязываться к последовательности обнаружения или к набору последовательностей обнаружения (например, конкретному корню, физическому ресурсу и т.п.).
[0275] В вариантах осуществления рассматривается одно или несколько действий WTRU, относящихся к сигналу обнаружения. WTRU, сконфигурированный для приема или сконфигурированный для передачи сигналов обнаружения, может конфигурироваться, чтобы выполнять одну или несколько функций, возможно до события обнаружения (для иллюстрации, событие обнаружения может относиться к передаче сигнала обнаружения и/или к приему сигнала обнаружения). В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения того, следует ли или нет принимать или передавать сигнал обнаружения, возможно, когда аппаратные средства радио WTRU могут также требоваться для других использований. Далее, сигнал обнаружения может передаваться на частоте UL или DL. Возможно в зависимости от конструкции, передающий или принимающий WTRU может выполнять ряд реконфигураций. В одном или нескольких вариантах осуществления предполагается, что WTRU может быть сконфигурирован для выполнения одной или нескольких функций, описанных здесь далее.
[0276] В одном или нескольких вариантах осуществления предполагается, что WTRU может быть сконфигурирован для определения приоритета события обнаружения. В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения того, может ли событие обнаружения иметь превосходство над другими событиями передачи/приема или нет, например, основываясь по меньшей мере отчасти на предопределенных правилах. В случае, когда событие обнаружения может иметь превосходство, WTRU может выполнять одну или несколько других предполагаемых функций. В противном случае WTRU может не принимать/передавать сигнал обнаружения и может продолжать действовать обычным способом.
[0277] В одном примере WTRU может быть сконфигурирован для передачи последовательности обнаружения на частоте UL. Если WTRU может планироваться одновременно для передачи сигнала обнаружения и другого сигнала восходящей линии связи, такого как PUSCH или PUCCH, то WTRU может определять, какой сигнал имеет приоритет.
[0278] Например, WTRU может быть сконфигурирован (например, фиксированным образом в спецификациях или через сигнализацию более высокого уровня) с одним или несколькими из следующих правил: PUSCH и/или PUCCH имеют более высокий приоритет над передачей сигнала обнаружения; PUSCH и/или PUCCH имеют более высокий приоритет над периодической передачей сигнала обнаружения; запланированная (например, по PDCCH) передача сигнала обнаружения имеет более высокий приоритет над PUCCH и/или PUSCH; и/или периодическая передача сигнала обнаружения имеет более высокий приоритет над PUCCH и/или PUSCH.
[0279] В некоторых вариантах осуществления такие правила назначения приоритета в WTRU могут также учитывать возможные различные типы управляющей информации (например, A/N, CSI, SR), конфликтующие с возможностями передачи сигнала обнаружения UL, например, субкадрами UL, в которых может передаваться сигнал обнаружения. Например, WTRU, определяющий, что субкадр, в котором может передаваться сигнал обнаружения, также может соответствовать возможности передачи периодической CSI на PUCCH, может прекратить передачу CSI в этом субкадре и может передавать сигнал обнаружения.
[0280] Еще в одном примере WTRU, определяющий, что субкадр UL, в котором должен передаваться сигнал обнаружения, также может соответствовать субкадру, в котором он может послать A/N на PUCCH, может передавать A/N вместе с сигналом обнаружения в таком субкадре, когда структура формата сигнала обнаружения может позволить эту возможность. Если PUCCH и сигнал обнаружения могут передаваться посредством WTRU параллельно и независимо в некотором субкадре, то WTRU может посылать оба сигнала в таком субкадре, возможно, в некоторых вариантах осуществления подчиняясь правилам назначения приоритета для мощности передачи.
[0281] В другом примере WTRU может быть сконфигурирован для приема последовательности обнаружения на частоте UL. Если WTRU может планироваться одновременно для приема на частоте нисходящей линии связи, то WTRU может определять, какой сигнал может иметь приоритет. Например, WTRU может быть сконфигурирован (например, фиксированным образом в спецификациях или через сигнализацию более высокого уровня) с одним или несколькими из следующих правил:
- Управление нисходящей линии связи (например, PDCCH для HARQ-ACK и т.п.) и/или данные (например, PDSCH) имеют более высокий приоритет над приемом сигнала обнаружения;
- Управление нисходящей линии связи (например, PDCCH для HARQ-ACK и т.п.) и/или данные (например, PDSCH) имеют более высокий приоритет над периодическим приемом сигнала обнаружения;
- Запланированный (например, по PDCCH) прием сигнала обнаружения имеет более высокий приоритет над приемом управления нисходящей линии связи (например, PDCCH для HARQ-ACK и т.п.) и/или данных (например, PDSCH); и/или
- Периодический прием сигнала обнаружения имеет более высокий приоритет над управлением нисходящей линии связи (например, PDCCH для HARQ-ACK и т.п.) и/или данными (например, PDSCH).
[0282] В случае, когда WTRU принимает два противоречивых указания планирования сетью, WTRU может быть сконфигурирован, чтобы игнорировать одно из указаний планирования, как определено описанными правилами.
[0283] Предыдущий пример можно распространить на случай, в котором сигнал обнаружения передается/принимается на частоте DL. В таких случаях, вышеупомянутые правила могут быть инвертированы. Например, правила для передачи UL могут применяться, например, к приему DL, а правила для приема UL могут применяться к передаче DL.
[0284] В одном или нескольких вариантах осуществления предполагается, что WTRU может быть сконфигурирован для реконфигурирования своего радио. В некоторых вариантах осуществления WTRU может быть сконфигурирован для реконфигурирования своего радио для передачи/приема сигнала обнаружения.
[0285] Например, WTRU может быть сконфигурирован для приема сигнала обнаружения на частоте UL. WTRU может быть сконфигурирован для реконфигурирования своего радио для приема сигнала обнаружения на частоте UL. В некоторых вариантах осуществления WTRU может реконфигурировать радио перед тем, как сигнал обнаружения, как ожидается, может быть принят, чтобы принять его во всей его полноте. При реконфигурировании WTRU может выполнять одну или несколько из следующих функций (в любом порядке или комбинации): остановка передачи на частоте UL, остановка приема на частоте DL, переключение частоты приема, например, на UL.
[0286] Еще в одном примере WTRU может быть сконфигурирован для передачи сигнала обнаружения на частоте DL. WTRU может быть сконфигурирован для реконфигурирования своего радио для передачи сигнала обнаружения на частоте DL. В некоторых вариантах осуществления WTRU может реконфигурировать радио перед тем, как сигнал обнаружения может быть передан, для его надежной передачи. При реконфигурировании WTRU может выполнять одну или несколько из следующих функций (в любом порядке или комбинации): остановка передачи на частоте UL, остановка приема на частоте DL, конфигурирование радио для передачи на частоте DL.
[0287] В одном или нескольких вариантах осуществления предполагается, что WTRU может быть сконфигурирован для передачи/приема сигнала обнаружения. В некоторых вариантах осуществления принимающий WTRU может быть сконфигурирован для контроля сигнала обнаружения, и передающий WTRU может быть сконфигурирован для передачи сигнала обнаружения. В некоторых вариантах осуществления эта функция может выполняться в течение определенного времени.
[0288] В одном или нескольких вариантах осуществления предполагается, что WTRU может быть сконфигурирован для реконфигурирования своего радио (например, обратно в предыдущее состояние). В некоторых вариантах осуществления WTRU может быть сконфигурирован для реконфигурирования радио обратно в нормальное состояние работы. Например, WTRU может быть сконфигурирован для выполнения одной или нескольких из следующих функций (возможно, в зависимости от роли): остановка передачи/контроля сигнала обнаружения; реконфигурирование радио (например, возможно, если необходимо и полезно) и/или возобновление нормальных операций (например, реконфигурирование частоты для передачи/приема в зависимости от конфигурации).
[0289] В некоторых вариантах осуществления реконфигурирование радио может регулироваться по времени (например, чтобы позволить завершиться переходным процессам в электронных схемах). В некоторых вариантах осуществления WTRU могут конфигурироваться, чтобы применять реконфигурирование во время защитных временных интервалов, ассоциированных с сигналами обнаружения. WTRU может также конфигурироваться для реконфигурирования радио перед субкадром обнаружения и/или после него, что в некоторых вариантах осуществления может подразумевать, что защитные субкадры могут не использоваться или могут быть ненадежными.
[0290] В вариантах осуществления рассматривается одно или несколько действий WTRU, которые могут относиться к многосигнальному приему. Варианты осуществления учитывают, что в классических сотовых системах WTRU мог бы принимать и декодировать один сигнал за раз, когда он передается посредством eNB (например, может только принимать и декодировать такой сигнал в данный момент времени). В D2D может быть полезным, чтобы WTRU принимал множество параллельных сигналов, которые могут передаваться многими WTRU D2D. В вариантах осуществления рассматривается один или несколько методов для выполнения эффективного приема и декодирования этих сигналов. Используемые здесь индексы i, j, k и т.п., могут представлять нуль или положительные целые числа, тогда как I, J, K и т.п. могут представлять набор индексов, например, I=1:N, J={[2:5]∪ [8]∪[10:13]} и т.д.
[0291] WTRU может планироваться для приема и декодирования сигнала S D2D. Этот сигнал S может состоять из набора сигналов S(J). Фиг. 7 иллюстрирует пример для S и S(J), где J=1:N. Этот набор сигналов S(J) может передаваться набором WTRU(K) из WTRU D2D. В некоторых вариантах осуществления WTRU может быть сконфигурирован с полным или частичным отображением между S(J) и WTRU(K), например, какой сигнал может передаваться каким WTRU. В некоторых вариантах осуществления WTRU может быть сконфигурирован для выполнения слепого декодирования и может не иметь знания о передатчике одного или более или каждого сигнала.
[0292] В вариантах осуществления рассматривается одна или более реализаций многосигнального приема в D2D LTE. Приемник WTRU D2D может содержать набор обрабатывающих модулей M(L), которые могут применяться в по меньшей мере одной из следующих областей: RF, временной, частотной, области логарифмического отношения правдоподобия и/или битовой области. Один или более или каждый модуль M(i) может быть сконфигурирован посредством набора параметров P(i), которые могут включать в себя, например, параметр, специфический для состояния каждого модуля, например: частотное смещение, временное смещение, мощность или смещение усиления, состояние AGC и/или различные значения временных характеристик на интервале и т.д. WTRU может быть сконфигурирован для назначения конфигурации P(i,j) набору параметров P(i). Например, P(i,0) может соответствовать конфигурации, которая может быть оптимизирована для декодирования сигнала DL eNB, и P(i,5) может соответствовать конфигурации, которая оптимизирована для декодирования сигнала WTRU(5).
[0293] Фиг. 8 иллюстрирует пример многосигнального приемника. На фиг. 8 входной каскад приемника может быть определен RF каскадом M(1), за которым следует модуль (M2) обработки временной области и модуль М(3) обработки частотной области. RF каскад может включать в себя по меньшей мере один из следующих модулей: AGC, фильтр, ADC, осциллятор. Модуль обработки временной области может включать в себя CORDIC для компенсации частотного смещения, автокоррелятор и/или кросс-коррелятор для временной синхронизации. Набор параметров P(2), ассоциированный с M(2), может содержать α (угол, который должен применяться в CORDIC), W1 (начало/конец окна для запуска/остановки функции автокорреляции), T1 (порог для функции автокорреляции), W2 (окно для кросс-корреляции), T2 (порог для кросс-корреляции).
[0294] В вариантах осуществления предполагается, что один или более или каждый модуль WTRU может быть сконфигурирован для декодирования сигнала S D2D. В некоторых вариантах осуществления WTRU может конфигурировать набор модулей M(I) с конфигурацией, используемой для декодирования сигнала eNB: P(I)=P(I,0). В некоторых вариантах осуществления, WTRU может конфигурировать набор модулей M(I) с конфигурацией, которая может быть использована для декодирования сигнала eNB, объединенного с набором смещений Δ(I): P(I)=P(I,0)+Δ(I). Для одного или более или каждого параметра из P(I), смещение может быть статически определено и/или обеспечиваться посредством eNB. Например, WTRU может быть сконфигурирован для смещения конфигурации AGC, возможно, основываясь на максимальной дальности обнаружения и/или основываясь на GPS местоположении WTRU(j), среди прочих сценариев. Также, например, WTRU может быть сконфигурирован для смещения окна синхронизации (такого как W1 в примере на фиг. 8) на некоторое значение опережения тайминга D2D, которое может быть обеспечено посредством eNB.
[0295] WTRU может быть сконфигурирован для определения P(I), возможно, основываясь на приеме предыдущих сигналов D2D. В одном или нескольких вариантах осуществления рассматривается конфигурация P(I), основанная на сигнале S(j) D2D (например, возможно, в некоторых вариантах осуществления на одном таком сигнале). В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения P(I) для приема конкретного WTRU(k). Например, WTRU может быть сконфигурирован для обновления диапазона AGC, возможно, основываясь на измеренной мощности S(k), которая может быть ассоциирована с WTRU(k).
[0296] В вариантах осуществления рассматривается конфигурация P(I), основанная на множестве сигналов S(J) D2D. В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения P(I) для приема набора WTRU(K) из WTRU. В некоторых вариантах осуществления WTRU может конфигурировать P(I) как линейную комбинацию параметров, которые могут оптимизироваться для одного или более или каждого приема WTRU, следующим образом:

где, например:
I представляет набор модулей, которые необходимо конфигурировать;
J представляет набор сигналов WTRU, которые могут быть использованы для оптимизации/настройки параметров:
P(I,k,T) представляет набор значений параметров, которые могут быть оптимизированы для приема сигналов, ассоциированных с WTRU(k);
T представляет временное окно, которое может быть использовано для определения P(I,k), например, если T=0,2 сек, то любой сигнал, принятый более чем за 0,2 сек перед этим, не может использоваться для оптимизации/настройки параметров;
α - вектор, представляющий линейные весовые коэффициенты, применяемые к набору параметров P(i); и/или
Δ представляет вектор смещения, который может применяться к одному или более или каждому параметру, Δ может быть статически определен и/или обеспечиваться посредством eNB.
[0297] WTRU может быть сконфигурирован для переустановки параметров P(I,k,T) на основе одного или более из следующих триггеров: указание насыщения; частота успешного обнаружения снижается, и/или последовательные/смежные измерения показывают разницу выше предопределенного порога.
[0298] В некоторых вариантах осуществления WTRU может выполнять несколько итераций декодирования сигнала S (например, на наборе периодических субкадров), среди прочих сценариев, WTRU может быть сконфигурирован для использования конфигурации P(I,k), которая может быть оптимизирована для приема конкретного WTRU(k) для некоторых итераций декодирования (например, в наборе субкадров), и/или для использования конфигурации (I,1), которая может быть оптимизирована для приема конкретного UE(1) для других итераций декодирования (например, в другом наборе субкадров). В некоторых вариантах осуществления этот подход может быть распространен на любое число сигналов WTRU, подлежащих декодированию.
[0299] В одном или нескольких вариантах осуществления рассматривается многосигнальная обработка, включающая в себя параллельную обработку. В некоторых вариантах осуществления множество сигналов могут декодироваться параллельно в примерном модуле M(i). Модуль M(i) может содержать множество параллельных субмодулей обработки (пример которых иллюстрируется на фиг. 9). WTRU может быть сконфигурирован для применения конкретной конфигурации к каждому субмодулю. Эта конфигурация может вычисляться, как объясняется здесь дальше.
[0300] В вариантах осуществления рассматривается последовательная обработка, например, когда множество сигналов могут декодироваться последовательно. WTRU может быть сконфигурирован для применения конфигурации P(i,k) для модуля M(i), возможно, чтобы декодировать WTRU(k) и/или выполнять N итераций обработки в модуле M(i+1), среди прочих сценариев. WTRU может быть сконфигурирован для выполнения одной или более или каждой итерации обработки с различной конфигурацией P(i+1,1). Фиг.10 иллюстрирует пример такого подхода.
[0301] В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения P(i+1,1), как описано здесь более детально. В некоторых вариантах осуществления WTRU может быть сконфигурирован для определения P(i+1,1), чтобы полностью или по меньшей мере частично компенсировать в модуле M(i) обработку, которая могла выполняться с конфигурацией, которая может быть оптимизирована для другого WTRU. Например, точка синхронизации может выбираться для WTRU(k) во временной области (M(2)) и CORDIC может применяться к сигналу частотной области, чтобы, возможно, компенсировать временной сдвиг (например, который может быть эквивалентен наклону в частотной области), для UE(1), среди прочих причин.
[0302] Варианты осуществления учитывают, что потенциальной проблемой, которая может быть ассоциирована с последовательной обработкой, может быть ограничение на размер буфера, который может ограничивать максимальное число итераций обработки, которые могут выполняться в модуле M(i+1). WTRU может быть сконфигурирован для применения одного или нескольких из следующих примерных методов:
- Вычисление максимального числа итераций N, доступных для M(i), на основе текущей нагрузки приемника и времени ожидания;
- Разбиение набора параллельных сигналов, подлежащих декодированию, на N групп;
- Разбиение может быть основано на информации сигналов, такой как:
- последнее успешное декодирование сигнала,
- измерения сигнала (мощности, временных характеристик и т.п.) и/или
- приоритет декодирования сигналов и т.п.;
- Вычисление оптимальной конфигурации P(i,k), P(i,l), P(i,m) и т.п. для одной или более или каждой группы сигналов (как описано здесь); и/или
- Выполнение последовательной обработки над S для одной или более или каждой конфигурации.
[0303] В вариантах осуществления рассматривается последовательная компенсация сигналов, например, где множество сигналов могут декодироваться последовательно, и/или один или более или каждый декодированный сигнал может удаляться из исходного сигнала. В некоторых вариантах осуществления WTRU может быть сконфигурирован для выполнения одного или нескольких из следующих примерных методов:
- буферизация сигнала S - входа модуля M(i);
- обработка S с параметрами P(j) в модуле M(i), где P(j) может оптимизироваться для декодирования WTRU(j);
- удаление S(j) из сигнала S; и/или
- обработка S с параметрами P(k) в модуле M(i), где P(k) может оптимизироваться для декодирования WTRU(k).
[0304] В вариантах осуществления рассматривается одна или несколько конфигураций приемника WTRU для многосигнального приема D2D LTE. В одном или нескольких вариантах осуществления WTRU может быть сконфигурирован для декодирования комбинации параллельных сигналов D2D, как иллюстрируется в примере на фиг. 11. WTRU может быть сконфигурирован с информацией планирования сигнала, отображаемого на один или несколько передатчиков WTRU. WTRU может быть сконфигурирован для применения конфигурации P(I,0) приемника в момент t0, где P(I,0) может быть конфигурацией, которая может оптимизироваться для приема сигнала eNB. WTRU может быть сконфигурирован для выполнения начального измерения в момент t0 мощности (Pi), частотного смещения (Δfi) и/или временной опоры (Ti) для одного или более и/или каждого передатчика (UE 1-3) WTRU.
[0305] WTRU может быть сконфигурирован для определения весового коэффициента (αi) для одного или более или каждого пользователя, основываясь на измерении мощности, например:
α1=Р1/(Р1+Р2+Р3)
α2=Р2/(Р1+Р2+Р3) и/или
α3=Р3/(Р1+Р2+Р3)
[0306] WTRU может быть сконфигурирован для применения конфигурации P(I,1) приемника в момент t1, где P(I,1) может быть конфигурацией, оптимизированной для приема UE(1), например:
Уровень AGC, основанный на P1;
Временная опора = Ti и/или
Частотное смещение для компенсации = Δf1.
[0307] WTRU может быть сконфигурирован для применения конфигурации P(I,1) приемника в момент t1, где P(I,1) может быть конфигурацией, оптимизированной для приема UE(1), например:
Уровень AGC, основанный на P1;
Временная опора = T1 и/или
Частотное смещение для компенсации = Δf1.
[0308] WTRU может быть сконфигурирован для применения конфигурации P(I,2) приемника в момент t2, где P(I,2) может быть конфигурацией, оптимизированной для приема UE(1) и UE(2), как например:
Уровень AGC, основанный на max(P1,P2);
Временная опора = min(T1,T2) и/или
Частотное смещение для компенсации = (Δf1+Δf2)/2.
[0309] WTRU может быть сконфигурирован для применения конфигурации P(I,3) приемника в момент t3, где P(I,3) может быть конфигурацией, оптимизированной для приема UE(1), UE(2) и UE(3), как например:
Уровень AGC, основанный на max(P1,P2,P3);
Временная опора = α1Т1+α2Т2+α3Т3 и/или
Частотное смещение для компенсации = (α1Δf1+α2Δf2+α3Δf3).
WTRU может быть сконфигурирован для выполнения начального измерения в момент t3 мощности (Pi), частотного смещения (Δfi) и/или опоры синхронизации (Ti) для одного или более или каждого передатчика (UE 1-3) WTRU.
[0310] WTRU может быть сконфигурирован для определения весового коэффициента (αi) для одного или более или каждого пользователя на основе измерения мощности, например:
α1=Р1/(Р1+Р2+Р3)
α2=Р2/(Р1+Р2+Р3) и/или
α3=Р3/(Р1+Р2+Р3)
WTRU может быть сконфигурирован для повторения одного или нескольких из вышеупомянутых методов для других случаев приема.
[0311] В одном или нескольких вариантах осуществления рассматривается обнаружение и/или измерение сигналов обнаружения. WTRU может детектировать наличие и/или временные характеристики сигнала обнаружения посредством измерения по меньшей мере одного сигнала синхронизации, который может быть частью сигнала обнаружения (или ассоциирован с ним). WTRU может выполнять эти измерения в течение временных окон, обеспеченных более высокими уровнями. Например, WTRU может быть сконфигурирован с набором субкадров, в которых может присутствовать сигнал синхронизации.
[0312] В некоторых вариантах осуществления WTRU может определять идентификатор, ассоциированный с сигналом обнаружения, основываясь на свойстве детектированного(ых) сигнала(ов) синхронизации.
[0313] В некоторых вариантах осуществления WTRU может определять, из свойства сигнала обнаружения, информацию о времени или аппроксимировать время, в которое могут приниматься другие сигналы и/или информация полезной нагрузки из устройства, передающего сигнал обнаружения. Эта информация может быть полезна, когда устройство может передавать информацию полезной нагрузки с низкой периодичностью (такой как, например, десятки секунд). Принимающее устройство может использовать эту информацию для определения момента времени, в который оно может инициировать одну или более процедур приема для детектирования полезной нагрузки и/или других сигналов. Принимающее устройство может прерывать одну или несколько процедур приема (например, входить в состояние низкой активности) до указанного момента, возможно, чтобы снизить потребление аккумулятора, среди прочих причин.
[0314] В некоторых вариантах осуществления конкретная детектированная корневая последовательность ZC и/или конкретный детектированный циклический сдвиг корневой последовательности ZC могут указывать минимальную длительность, в течение которой устройство, передающее сигнал обнаружения, может не передавать полезную нагрузку и/или другие сигналы. Например, первое значение корневой последовательности ZC (или другое свойство, как например, последовательность Голда и/или положение в частотной области) может указывать, что полезная нагрузка не может передаваться в течение по меньшей мере 10 секунд (среди прочих рассматриваемых временных периодов). После детектирования этого значения принимающее устройство может входить в состояние низкой активности на 10 секунд и затем может инициировать процедуры приема для декодирования полезной нагрузки. Второе значение корневой последовательности ZC может указывать, что полезная нагрузка не может передаваться, например, в течение по меньшей мере 20 секунд (среди прочих рассматриваемых временных периодов).
[0315] В одном или нескольких вариантах осуществления рассматривается определение принимаемой мощности и/или качества сигнала обнаружения. WTRU может выполнять и/или сообщать в сеть по меньшей мере один тип измерения на сигнале обнаружения. Тип измерения может соответствовать оценке принимаемой мощности сигнала обнаружения. Такое измерение в настоящем описании может упоминаться как принятая мощность сигнала обнаружения (или DSRP).
[0316] В некоторых вариантах осуществления измерение принятой мощности DSRP может определяться путем усреднения вкладов мощности ресурсных элементов, соответствующих назначенному набору сигнальных компонентов, образующих сигнал обнаружения. Такие компоненты могут включать в себя один или более или все из ресурсных элементов, соответствующих:
- Опорному(ым) сигналу(ам)
- Сигналу(ам) синхронизации
- Последовательности(ям) обнаружения и/или
- Полезной нагрузке.
[0317] В некоторых вариантах осуществления усреднение вкладов мощности ресурсных элементов, характерных для измерения DSRP на принятом сигнале обнаружения, может выполняться в линейной области. Возможно, если контролирующее WTRU может использовать более одной Rx антенны, то усреднение вкладов мощности может выполняться на портах Rx антенн.
[0318] В некоторых вариантах осуществления измерение DSRP может выполняться на назначенной или сконфигурированной ширине полосы при сравнении с полной системной шириной полосы (или в некоторых вариантах осуществления возможно только в такой ширине полосы).
[0319] В некоторых вариантах осуществления измерение принятой мощности DSRP может определяться посредством усреднения вкладов мощности компонентов сигнала обнаружения по назначенному или сконфигурированному поднабору временных символов для возможностей передачи сигналов обнаружения.
[0320] В некоторых вариантах осуществления тип измерения может соответствовать оценке принятого качества сигнала обнаружения, которое может упоминаться здесь как качество принятого сигнала обнаружения (DSRQ), в качестве примера, но не ограничения.
[0321] Например, такое измерение DSRQ может определяться частично из DSRP, определенной здесь, и/или дополнительных измерений.
[0322] В другом примере DSRQ может определяться как отношение N×DSRP/RSSI, где RSSI может определяться путем линейного усреднения полной принятой мощности во временных символах, где по меньшей мере один ресурсный элемент может быть использован для определения DSRP. Значение N может соответствовать числу ресурсных блоков, использованных для определения RSSI.
[0323] Один или несколько вариантов осуществления рассматривают временные характеристики (тайминг) сигнала обнаружения. Тип измерения может соответствовать оценке принятых временных характеристик сигнала обнаружения. Такое измерение может упоминаться в настоящем описании, например, как тайминг сигнала обнаружения (или DST).
[0324] Тайминг может соответствовать временной разности (Td-Tref) между началом приема сигнала обнаружения или одной его компоненты (Td) и началом приема второго сигнала (Tref). Компонента сигнала обнаружения, которая может быть использована для определения Td, может соответствовать по меньшей мере одному из:
- Опорного сигнала
- Сигнала синхронизации
- Полезной нагрузки.
[0325] Начало приема одного из вышеупомянутых сигналов может соответствовать началу конкретного временного символа, где сигнал может быть представлен, такого как первый временной символ.
[0326] Td может определяться как начало субкадра, тайминг которого может иметь известное соотношение при сравнении с измеренной компонентой сигнала обнаружения. Например, если определяется, что часть опорного сигнала в сигнале обнаружения должна передаваться в третьем символе субкадра, то WTRU может определять Td путем измерения начала приема опорного сигнала и вычитания длительности, соответствующей трем символам.
[0327] Начало приема второго сигнала (Tref) может соответствовать началу одного субкадра (или одного кадра) из обслуживающей соты WTRU. Обслуживающая сота WTRU может представлять собой по меньшей мере одну из первичной обслуживающей соты и/или обслуживающей соты, работающей на той же несущей, что и несущая, из которой принимается сигнал обнаружения. Субкадр (или кадр) может соответствовать по меньшей мере одному из субкадра (или кадра), в течение которого начинается прием сигнала обнаружения; субкадра (или кадра), в течение которого заканчивается прием сигнала обнаружения; субкадра (или кадрв), начальное время которого является ближайшим к Td.
[0328] В одном или нескольких вариантах осуществления рассматривается по меньшей мере одна конфигурация измерения. WTRU может выполнять по меньшей мере одно из вышеупомянутых измерений на сигнале обнаружения, возможно, предполагая по меньшей мере одну из следующих характеристик: идентификатор, ассоциированный с сигналом обнаружения; свойство опорного сигнала, который является частью сигнала обнаружения, такое как начальное значение генератора псевдослучайной последовательности, используемого для последовательности опорного сигнала; набор ресурсных элементов, в котором может находиться часть сигнала обнаружения; по меньшей мере один субкадр, в котором может находиться сигнал обнаружения; и/или время, в которое начинается часть сигнала обнаружения.
[0329] По меньшей мере одна из вышеупомянутых характеристик может определяться как функция второй характеристики. Например, начальное значение генератора псевдослучайной последовательности может определяться из идентификатора.
[0330] По меньшей мере одна из вышеупомянутых характеристик может быть предварительно определена или получена из сигнализации более высокого уровня. Например, набор ресурсных элементов, в котором может присутствовать опорный сигнал, может быть предварительно определен. В другом примере идентификатор, ассоциированный с сигналом обнаружения, может быть обеспечен посредством сигнализации более высокого уровня.
[0331] По меньшей мере одна из вышеупомянутых характеристик может быть определена из части сигнала синхронизации сигнала обнаружения (или ассоциирована с ней). Например, идентификатор может быть определен из сигнала синхронизации как часть описанной здесь процедуры обнаружения. Время начала опорного(ых) сигнала(ов) может определяться на основе тайминга сигнала синхронизации. Например, тайминг опорного сигнала может определяться как смещение, добавленное к таймингу сигнала синхронизации. Смещение может быть больше или меньше, чем длительность субкадра.
[0332] В одном или нескольких вариантах осуществления рассматривается представление отчета об измерении. Измерение и/или представление отчета об измерениях обнаружения могут регулироваться и/или управляться подсистемой измерений протокола RRC. В этом случае ресурсы сигнала обнаружения могут быть включены в объект измерения, или может быть задан новый тип (например, до сего времени не определенный для этой цели) объекта измерения. Конфигурация представления отчета может, например, использовать существующие события или вновь определяемые события.
[0333] В некоторых вариантах осуществления событие, которое может запускать передачу отчета измерения, может иметь место, когда тайминг сигнала обнаружения становится ниже или выше порога (возможно, плюс положительный или отрицательный гистерезис).
[0334] В вариантах осуществления рассматриваются операции WTRU вне зоны покрытия сети. В некоторых вариантах осуществления WTRU может предварительно конфигурироваться с набором правил и/или параметров для обнаружения, например, в сценариях, в которых WTRU может работать вне зоны покрытия сети (например, WTRU может быть с параметрами по умолчанию в спецификациях, и/или с конфигурацией, сохраненной, например, в памяти WTRU или в его USIM). WTRU может использовать эти параметры для передачи/приема сигналов обнаружения.
[0335] WTRU может быть сконфигурирован для контроля сигнала синхронизации (например, передаваемого из другого WTRU по соседству или главного модуля кластера (CH)). WTRU может тогда выводить параметры для обнаружения (например, тайминг кадра и/или субкадра и/или значения идентификатора соты и т.д.) из сигнала СН.
[0336] В вариантах осуществления рассматривается один или несколько методов WTRU с сигналом обнаружения, в том числе методы, которые могут включать в себя не специфическое для WTRU распределение и/или специфическую для WTRU последовательность. В некоторых вариантах осуществления контролирующий WTRU может определять, какой(ие) субкадр(ы) может (могут) нести сигналы обнаружения (например, субкадр обнаружения), возможно, посредством сигнализации RRC и/или SIB. Контролирующий WTRU может определять параметры физического уровня сигнала обнаружения из SIB и/или на основе системной ширины полосы и/или других фиксированных значений. WTRU может выполнять одно или более из следующего:
- При приеме субкадра обнаружения контролирующий WTRU может настраивать свой приемник на частоту UL и может пытаться детектировать сигналы обнаружения в областях обнаружения;
- WTRU может детектировать код синхронизации из списка возможных кодов синхронизации (например, ассоциированных с ID соты);
- WTRU может получать последовательность обнаружения (и/или (DMRS) из списка возможных значений и/или может определять индексы, ассоциированные с кодом(ами) синхронизации и/или с конфигурацией последовательности обнаружения/пилот-сигнала;
- WTRU может определять номер субкадра, ассоциированный с передачей обнаружения, что может подразумевать получение WTRU тайминга кадра и/или субкадра соты, с которой может быть ассоциирован сигнал обнаружения;
- WTRU может оценивать канал с использованием известных символов пилот-сигнала/синхронизации;
- WTRU может определять и/или может применять параметры генератора скремблирования и/или
- WTRU может декодировать полезную нагрузку сигнала обнаружения.
[0337] В вариантах осуществления рассматривается один или несколько методов WTRU с сигналом обнаружения, включая методы, которые могут включать в себя не специфическое для WTRU распределение и/или не специфическую для WTRU последовательность. В некоторых вариантах осуществления, контролирующий WTRU может определять, какие субкадры могут нести сигналы обнаружения (например, субкадр обнаружения), например, посредством сигнализации RRC и/или SIB. Контролирующий WTRU может определять параметры физического уровня сигнала обнаружения из SIB и/или на основе системной ширины полосы и/или других фиксированных значений. WTRU может выполнять одно или более из следующего:
- При приеме субкадра обнаружения контролирующий WTRU может настраивать свой приемник на частоту UL и может пытаться детектировать сигналы обнаружения в областях обнаружения;
- WTRU может детектировать код синхронизации из списка возможных кодов синхронизации (например, ассоциированных с ID соты);
- WTRU может оценивать канал с использованием ассоциированных последовательности обнаружения/пилот-сигналов и/или символов синхронизации;
- WTRU может определять номер субкадра, ассоциированный с передачей обнаружения, что может подразумевать получение WTRU тайминга кадра и/или субкадра соты, с которой может быть ассоциирован сигнал обнаружения;
- WTRU может определять и/или применять параметры генератора скремблирования и/или
- WTRU может декодировать полезную нагрузку сигнала обнаружения.
[0338] Фиг. 13 иллюстрирует примерную сотовую сеть, основанную на мультиплексировании с временным разделением (TDM). Фиг. 14 иллюстрирует примерные временные характеристики (тайминг), относящиеся к сети примерной топологии по фиг. 13.
[0327] Как показано на фиг. 13, обнаруживаемый WTRU (WTRU1) может передавать сигнал обнаружения к контролирующему WTRU (WTRU2). Можно предположить, что субкадры (n-1) и (n+1) являются смежными к субкадру обнаружения (n), которые могут планироваться для сетевых коммуникаций (обнаруживаемого и контролирующего WTRU). Чтобы избежать помех на субкадре (n+1), можно предположить, что обнаруживаемый WTRU может использовать свой тайминг восходящей линии связи (UL) для сигнала обнаружения.
[0328] Используемая здесь терминология может включать в себя, например, Rc - радиус/дальность соты, Rd - радиус и/или дальность обнаружения, TP1 - задержка распространения между eNB и WTRU1, TP2 - задержка распространения между eNB и WTRU2 и TPd - задержка распространения между WTRU1 и WTRU2. Разброс задержки может быть частью задержки распространения. Терминология может дополнительно включать в себя, например, ΔS - время ожидания переключения частоты (с частоты нисходящей линии связи (DL) на частоту UL, или с частоты UL на DL), ΔL - искаженное время приемника (Rx) в начале сигнала обнаружения, и ΔM - искаженное время Rx в конце сигнала обнаружения. Если для сигнала обнаружения используется выделенный приемопередатчик, то значение ΔS может быть нулевым.
[0329] Как иллюстрируется на фиг.14, воздействие искажения сигнала может быть вычислено с использованием следующих уравнений:
ΔL=ΔS+TP1+TP2-TPd (5)
ΔM=ΔS+TPd-TP2-TP1 (6)
[0330] В уравнении (5), когда TP1 увеличивается, WTRU1 может посылать свой сигнал обнаружения (например, на его UL тайминге) раньше, например, во время приема субкадра (n-1) посредством WTRU2. Когда TP2 увеличивается, WTRU2 может принимать свой субкадр DL позже. Это может привести к тому, что WTRU2 будет иметь меньше времени, чтобы переключиться на частоту UL и принять сигнал обнаружения. Время ожидания ΔS переключения может добавляться к задержке приема. Задержка распространения между WTRU1 и WTRU2, TPd, может компенсировать три другие величины, поскольку она может задержать поступление сигнала обнаружения в WTRU2.
[0331] В уравнении (6) TPd может задержать конец приема сигнала обнаружения. ΔS может быть использовано для коррекции приема субкадра (n+1) DL на частоте DL. TP1 может сдвигать вперед передачу сигнала обнаружения и конец его приема. TP2 может задерживать приход субкадра (n+1) DL в WTRU2 и может обеспечить больше времени для завершения приема сигнала обнаружения (или для начала приема субкадра (n+1) DL). Для WTRU, привязанных к той же самой соте, TPd может быть ограничено величиной (TP1+TP2). ΔL может быть больше или равно ΔS, и/или ΔM может быть меньше или равно ΔS.
[0332] Фиг. 15 иллюстрирует примерную топологию, основанную на мультиплексировании с частотным разделением (FDM). Фиг. 16 иллюстрирует примерный тайминг, относящийся к сети примерной топологии по фиг. 15. Как иллюстрируется на фиг. 15 и 16, Tpi может быть значениями времени распространения для каждого WTRU, WTRUi.
[0333] Как иллюстрируется на фиг. 16, ΔP может представлять потерю ортогональности между двумя FDM сигналами (например, секцией сигнала вне циклического префикса обоих сигналов) и может вычисляться посредством уравнения (7):
ΔР=TP4-TPd+TP1-TP3-СР_длительность
[0334] Для WTRU, привязанных к той же самой соте, TPd может быть ограничено величиной (TP2+TP3). Тогда уравнение (7) может иметь вид:
ΔР≤TP1+TP2-TPd-СР_длительность
[0335] Наихудший случай может возникнуть, когда TPd становится приблизительно равным нулю. По сравнению со случаем сети (где приемник может находиться в центре соты), максимальное время распространения TP4max может удваиваться, так что длительность обычного циклического префикса LTE может стать слишком короткой.
[0336] Опорные сигналы LTE могут быть, например, основаны на последовательностях Задова-Чу. Последовательность Задова-Чу (ZC) длиной Nzc может быть определена как:
где u - корень последовательности, может быть простым числом относительно Nzc (например, когда общий делитель для u и Nzc равен 1).
[0337] Для фиксированного u, последовательность ZC может иметь свойство периодической автокорреляции (например, периодическая автокорреляция может быть нулевой для временных сдвигов иных, чем нуль). Для различных u, последовательности ZC могут не быть ортогональными, но могут проявлять низкую кросс-корреляцию. Если длина NZC последовательности выбирается как простое число, то может существовать (Nzc-1) различных последовательностей с периодической кросс-корреляцией 1/√NZC между двумя любыми последовательностями, независимо от временного сдвига. Набор ортогональных сигналов может генерироваться посредством задания циклических временных сдвигов той же самой последовательности ZC. Этот подход может быть использован в сетях LTE.
[0338] Как иллюстрируется на фиг. 17, разность времени распространения (включая разброс задержки) между двумя сигналами CDM может быть ниже размера циклического сдвига, например, чтобы поддерживать ортогональность. Для топологии, описанной на фиг. 15, минимальное значение размера циклического сдвига (ΔCS) может быть ограничено согласно уравнению (10):
ΔCS>TP1max+TP2max
[0339] Ограничение размера циклического сдвига может влиять на максимальное число ортогональных сигналов, доступных для заданного размера последовательности ZC.
[0340] Процедуры тайминга, проиллюстрированные на фиг. 14 и 16, могут представлять проблемы, включая то, каким образом можно избежать или минимизировать искажение приема сигнала обнаружения (например, создаваемое временем распространения и временем ожидания переключения) и/или потерю ортогональности сигналов (обнаружения и сети) (например, создаваемую временем распространения и множественностью опорных значений синхронизации).
[0341] Если используется мультиплексирование FDM между сетевыми передачами и сигналами обнаружения, то приемник eNB может испытывать эффект “ближнего - дальнего” для WTRU, близких к eNB. Максимальная мощность передачи сигналов обнаружения в WTRU может быть снижена на основе расстояния WTRU от eNB, чтобы сохранить корректный прием сетевых передач. Это может привести к недостаточным дальностям обнаружения, основанным на местоположении WTRU.
[0342] Уровень помех на краю соты может быть намного выше, чем в ее центре. Даже если мощность передачи WTRU выше на краю соты, то отношение сигнала к помехе плюс шуму (SINR) сигнала обнаружения, как наблюдается контролирующими WTRU, может быть ниже.
[0343] Процедуры управления мощностью могут представлять проблемы, включая обработку помех от сигналов обнаружения сетевым передачам (например, эффект “ближнего - дальнего”, который может возникать при приеме посредством eNB) и/или обеспечение достаточных и предопределенных дальностей сигналов обнаружения.
[0344] Термин “устройство” может относиться, например, к беспроводному приемопередающему модулю, такому как WTRU, клиенту, сетевому адаптеру и т.п. Термин “устройство” может относиться к фиксированным или мобильным ретрансляторам, фемто-сотам, малым сотам и домашним eNB, например, в обстоятельствах, когда эти узлы ведут себя по правилам, подобным таковым для WTRU.
[0345] Термин “сеть” может относиться, например, к элементу или функции инфраструктуры беспроводной сети, которая может иметь способность управления передачей и/или приемом устройств (например, WTRU), или может передавать сигналы, используемые устройствами в качестве опорных. Примеры сетевых элементов могут включать в себя eNB, MME, S-GW и т.п. Термин “сеть” может относиться устройству, которое может иметь способность сети в контексте. Например, в некоторых приложениях общественной безопасности, может быть возможным, что некоторое устройство принимает на себя роль сети для некоторых функциональных возможностей, например, обеспечение опорного сигнала синхронизации.
[0346] Могут быть обеспечены способы, относящиеся к временным характеристикам (таймингу) сигналов обнаружения. Эти способы могут выполняться передающим WTRU, обнаруживаемым WTRU, принимающим WTRU и/или контролирующим WTRU. Передача и прием сигналов обнаружения и связь D2D могут происходить вслед за кадром обнаружения. В контексте LTE, кадр обнаружения может длиться 10 мс и может быть разделен на 10 субкадров обнаружения по 1 мс. Субкадр обнаружения может включать в себя 2 временных интервала обнаружения. Соотношение между кадром обнаружения, субкадром обнаружения и временными интервалами обнаружения иллюстрируется на фиг. 20.
[0347] WTRU может или не может одновременно передавать обычный сигнал в обычном субкадре восходящей линии связи и сигнал обнаружения или сигнал связи D2D в субкадре обнаружения. WTRU в зоне покрытия сети может быть сконфигурирован для использования радиокадра нисходящей линии связи (например, от eNB, с которым он соединен или привязан) в качестве опоры для тайминга кадра обнаружения.
[0348] Может быть определен тайминг кадра обнаружения. WTRU может быть сконфигурирован для применения опережения тайминга к кадру обнаружения (например, опережения тайминга связи D2D, “D2D-TA”). Фиг. 21 иллюстрирует тайминг радиокадра обнаружения относительно тайминга радиокадра нисходящей линии связи и тайминга обычного радиокадра восходящей линии связи с точки зрения WTRU. На фиг. 21, TTA может представлять выравнивание по времени (например, в секундах) для радиокадра восходящей линии связи, и TD2D-TA может представлять выравнивание по времени (например, в секундах) для радиокадра обнаружения.
[0349] WTRU может быть сконфигурирован для определения опережения тайминга для кадра обнаружения (например, значения D2D-TA (TD2D-TA). Например, WTRU может быть сконфигурирован для определения значения D2D-TA посредством явно определенной конфигурации. WTRU может конфигурироваться явным образом, например, посредством сигнализации RRC, с конкретным значением для D2D-TA. Значение D2D-TA может быть фиксированным в спецификациях. WTRU может принимать конфигурацию D2D-TA явным образом от другого WTRU, например, через прямую линию связи от WTRU к WTRU (например, D2D).
[0350] Например, WTRU может быть сконфигурирован для определения значения D2D-TA посредством неявно определенной конфигурации. WTRU может быть сконфигурирован для определения значения D2D-TA, например, основываясь в одном или нескольких других неявных параметрах. WTRU может быть сконфигурирован для определения того, что радиокадр обнаружения может быть выровнен с радиокадром восходящей линии связи (например, TD2D-TA=TTA). WTRU может быть сконфигурирован для определения того, что радиокадр обнаружения может быть выровнен с радиокадром нисходящей линии связи (например, TD2D-TA=0). WTRU может быть сконфигурирован для определения того, что радиокадр обнаружения может быть выровннен с радиокадром восходящей линии связи с дополнительным смещением (например, TD2DOffset), которое может фиксироваться в спецификациях или динамически конфигурироваться посредством более высоких уровней. Например, значение D2F-TA может быть получено как TD2D-TA=TTA+TD2DOffset.
[0351] WTRU может определять значения D2D-TA, например, основываясь на состоянии WTRU. WTRU может определять, что, когда WTRU не имеет действительного опережения тайминга (например, WTRU находится не в соединенном режиме, или истек его таймер действительности опережения тайминга), тайминг кадра обнаружения может быть выровнен с таймингом кадра нисходящей линии связи (например, TD2D-TA=0). WTRU может определять, что, когда WTRU имеет действительное опережение тайминга, тайминг кадра обнаружения может быть выровнен с таймингом радиокадра восходящей линии связи (например, TD2D-TA=TTA).
[0352] Например, WTRU может быть сконфигурирован, чтобы определять значение D2D-TA на основе конфигурации соты и/или измерений WTRU. WTRU может быть сконфигурирован, чтобы определять значение D2D-TA, например, на основе одного или нескольких измерений WTRU.
[0353] WTRU может использовать радиокадр нисходящей линии связи в качестве опоры и может определять значение TD2D-TA от этой опорной точки. WTRU может определять смещение относительно тайминга TD2DOffset радиокадра восходящей линии связи. Для простоты, определение описано в контексте, где WTRU определяет смещение тайминга относительно радиокадра нисходящей линии связи. Способ также применим к определению смещения относительно тайминга радиокадра восходящей линии связи. Например, WTRU может использовать одно или несколько измерений или подходов в любом порядке или комбинации для определения значения тайминга радиокадра обнаружения (TD2D-TA).
[0354] WTRU может определять значение TD2D-TA, например, основываясь на параметрах соты, сигнализируемых в SIB. WTRU может определять значение TD2D-TA, основываясь на индексе конфигурации PRACH. Более конкретно, WTRU может быть сконфигурирован с таблицей, связывающей набор из одного или нескольких фиксированных значений TD2D-TA с соответствующим набором параметров конфигурации PRACH. WTRU может определять значение TD2D-TA с использованием формата преамбулы PRACH в качестве индекса в этой предварительно сконфигурированной таблице.
[0355] WTRU может быть сконфигурирован для определения значения TD2D-TA, основываясь на структуре кадра. Например, WTRU может быть сконфигурирован для специального значения TD2D-TA или специального смещения для структуры 1 кадра и другого значения для структуры 2 кадра (TDD).
[0356] WTRU может быть сконфигурирован для определения значения TD2D-TA на основе циклического префикса, используемого в соте. Например, WTRU может быть сконфигурирован для специального значения TD2D-TA или специального смещения для нормального циклического префикса и другого значения для расширенного циклического префикса.
[0357] WTRU может быть сконфигурирован для определения значения TD2D-TA, например, на основе одного или нескольких измерений потерь в тракте передачи. Например, WTRU может определять разницу в потерях в тракте передачи между двумя ближайшими сотами и определять регулировку для TD2D-TA, основываясь на разности потерь в тракте передачи.
[0358] WTRU может быть сконфигурирован для определения значения TD2D-TA на основе разности принимаемого тайминга кадра нисходящей линии связи между одной или несколькими сотами (например, с использованием измерения разности времени опорного сигнала (RSTD)). Например, WTRU может определять разность во времени приема между двумя ближайшими сотами и определять значение TD2D-TA на основе измеренной разности времени.
[0359] WTRU может быть сконфигурирован для использования различного опорного источника для тайминга. Например, этот подход может быть использован в контексте, где WTRU находится вне зоны покрытия сети. Этот подход может быть использован для непосредственно связи WTRU. Эти примерные способы также могут быть применимы для определения тайминга радиокадра нисходящей линии связи или радиокадра восходящей линии связи WTRU.
[0360] В одном примере, WTRU может быть сконфигурирован для определения тайминга радиокадра обнаружения, основываясь на измерении GNSS. WTRU может быть сконфигурирован для определения радиокадра обнаружения, основываясь, например, на тайминге GPS. WTRU может предварительно конфигурироваться (например, через его подписку или его USIM или через конфигурацию уровня приложений) для выравнивания своего тайминга радиокадра обнаружения на конкретном поднаборе геостационарных спутников.
[0361] WTRU может быть сконфигурирован для определения тайминга радиокадра обнаружения, основываясь на радиокадре обнаружения других WTRU. WTRU может быть сконфигурирован для контроля сигналов обнаружения и может быть сконфигурирован для выравнивания своего радиокадра обнаружения с синхронизацией выбранного WTRU. WTRU может быть сконфигурирован для выбора источника для временной опоры на основе мощности принятого сигнала. WTRU может быть сконфигурирован для выбора источника для временной опоры на основе содержимого или характеристики сигнала (например, корневой последовательности или циклического сдвига сигнала).
[0362] Операции могут изменяться, например, от субкадра, где имеют место обычные операции (например, связь с eNB), к субкадру, где имеют место операции, относящиеся к связи D2D (например, передача/прием сигнала обнаружения, связь D2D), и наоборот.
[0363] Вследствие задержки распространения, различных позиций WTRU и различного выравнивания времени между WTRU в соте, для принимающего WTRU, тайминг радиокадра восходящей линии связи другого передающего WTRU может быть не выровнен с его радиокадром восходящей линии связи или нисходящей линии связи. Эта разница в выравнивании в операциях D2D может быть проблематичной. Например, помехи рассогласования между субкадрами вследствие перекрытия между сигналом D2D и обычным сигналом, принадлежащими к различным субкадрам, и/или меньшая ортогональность OFDM, приводящая к дополнительным помехам. Чтобы смягчить эти потенциальные проблемы, WTRU может быть сконфигурирован с определенным таймингом кадра обнаружения. WTRU может выполнять действия, относящиеся к изменениям режима передачи/приема к и от субкадра обнаружения.
[0364] Например, передача D2D может происходить на той же частоте, что и передача восходящей линии связи в FDD, или в субкадре восходящей линии связи в операциях TDD. Если субкадр обнаружения не выровнен по времени с субкадром восходящей линии связи, то он может перекрываться со смежным субкадром восходящей линии связи. Например, если разность между TD2D-TA и TTA является положительной, как иллюстрируется на фиг. 22, то субкадр #n обнаружения может перекрываться во времени с субкадром #n-1 восходящей линии связи. Как показано на фиг. 22, субкадр #n обнаружения может не перекрываться с субкадром #n+1 восходящей линии связи, оставляя пустое пространство между временем, когда WTRU передает субкадр #n обнаружения, и временем, когда WTRU передает субкадр #n+1 восходящей линии связи.
[0365] Когда разность TD2D-TA-TTA является отрицательной, как иллюстрируется на фиг. 23, то субкадр #n обнаружения может перекрываться во времени с субкадром #n+1 восходящей линии связи. Как показано на фиг. 23, субкадр #n обнаружения может не перекрываться с субкадром #n-1 восходящей линии связи, оставляя пустое пространство между временем, когда WTRU передает субкадр #n-1 восходящей линии связи, и временем, когда WTRU передает субкадр #n обнаружения.
[0366] Можно уменьшить или избежать передач с перекрытием. WTRU может быть сконфигурирован, чтобы не передавать последние k символов OFDM субкадра восходящей линии связи, предшествующего передаче обнаружения. Более конкретно и со ссылкой на фиг. 22, WTRU может быть сконфигурирован, чтобы избегать передачи последних k символов OFDM субкадра #n-1 восходящей линии связи, когда WTRU сконфигурирован, чтобы передавать субкадр #n обнаружения.
[0367] Значение k может быть сконфигурировано более высокими уровнями, или WTRU может определять значение k посредством округления разности значений выравнивания тайминга между TTA и TD2D-TA до времени следующего символа OFDM. Разница временного выравнивания может квантоваться и выражаться в целых числах символов OFDM.
[0368] В другом примере WTRU может быть сконфигурирован, чтобы не передавать SRS, когда он планируется в последнем символе OFDM субкадра восходящей линии связи, предшествующего передаче субкадра обнаружения. Уменьшение PUSCH и PUCCH на один символ OFDM, когда передается SRS, может применяться, даже если SRS не передается.
[0369] Передача PUSCH на субкадре восходящей линии связи может регулироваться до меньшего числа OFDM символов, например, путем прокалывания кодированных битов или путем уменьшения размера транспортного блока в соответствии с субкадром уменьшенного размера. Передача PUCCH может регулироваться до меньшего числа OFDM символов, например, путем прокалывания кодированных битов или путем уменьшения размера транспортного блока в соответствии с субкадром уменьшенного размера.
[0370] WTRU может быть сконфигурирован, чтобы воздерживаться от передачи в субкадре обнаружения в течение периода перекрытия. Приоритет может быть отдан обычной передаче восходящей линии связи. WTRU может быть сконфигурирован, чтобы не передавать субкадр обнаружения в течение периода перекрытия и начинать передачу сразу после окончания периода перекрытия. WTRU может быть сконфигурирован, чтобы определять число символов OFDM, ассоциированных с периодом перекрытия (например, путем округления разности во времени вперед до длительности следующего символа OFDM) и может не передавать первый символ OFDM субкадра обнаружения.
[0371] WTRU может быть сконфигурирован с субкадром обнаружения, в котором первая часть специального субкадра может включать в себя защитный период фиксированного значения (например, выраженного целым числом символов OFDM). WTRU может быть сконфигурирован для использования субкадра обнаружения при смене с обычного субкадра восходящей линии связи на субкадр обнаружения. WTRU может быть сконфигурирован с субкадром обнаружения с предварительно заданным числом зарезервированных (например, не передаваемых) символов OFDM в начале и/или в конце специального субкадра обнаружения.
[0372] Хотя способы/подходы описаны в контексте положительной разности между TD2D-TA и TTA, они могут применяться в контексте отрицательной разности между TD2D-TA и TTA путем соответствующего изменения части субкадра, где может происходить перекрытие.
[0373] Когда WTRU конфигурируется для приема сигналов обнаружения и/или на частоте UL или в субкадре UL в операциях TDD, WTRU может быть сконфигурирован для определения того, когда начинать и/или когда останавливать контроль сигналов обнаружения или связи D2D. WTRU может определять и/или регулировать мощность сигнала обнаружения. Например, пусть PDISC(i) обозначают мощность сигнала обнаружения, передаваемую посредством WTRU, где i представляет собой индекс. Индекс может соответствовать, например, одному или более из номера кадра, номера субкадра, индекса ресурса обнаружения (субкадра, символа и т.п.) или индекса последовательности сигнала обнаружения. Чтобы гарантировать качество службы и минимизировать помехи сети и другим WTRU, обнаруживаемый WTRU может быть сконфигурирован, чтобы работать с использованием предела минимальной и/или максимальной мощности для сигнала обнаружения. Например, минимальная и максимальная мощность может относиться к минимальной и максимальной производительности обнаружения или каким-либо критериям близости (QoS, дальность, частота успешных попыток в данном контексте и т.п.).
[0374] WTRU может быть сконфигурирован, чтобы ограничивать мощность сигнала обнаружения (например, PDISC(i)), например, минимальной мощностью сигнала обнаружения (например, PMIN,d). WTRU может определять значение PMIN,d с использованием одного или комбинации из следующего. WTRU может принимать значение PMIN,d из сети, например, через сигнализацию PHY, MAC или RRC. WTRU может определять значение PMIN,d, например, через конфигурацию, передаваемую на SIB. WTRU может определять значение PMIN,d, основываясь на последней мощности передачи для канала данных или сетевого управления. Например, PMIN,d может соответствовать значению последнего переданного PUCCH. WTRU может определять значение PMIN,d, например, основываясь на другой комбинации параметров.
[0371] Когда WTRU конфигурируется с минимальной мощностью сигнала обнаружения, он может быть сконфигурирован, чтобы не уменьшать мощность сигнала обнаружения ниже этого предела. Например, когда WTRU определяет, что мощность сигнала обнаружения после обновления мощности будет становиться меньше предела минимальной мощности сигнала обнаружения, WTRU может выполнять одно или более из следующего в любом порядке или комбинации. WTRU может устанавливать мощность сигнала обнаружения на минимальное значение мощности сигнала обнаружения (например, PDISC(i)=PMIN,d). WTRU может останавливать накопление отрицательных команд TPC. WTRU может накапливать отрицательные команды TPC как в нормальных операциях, но WTRU может быть сконфигурирован, чтобы не применять команды TPC к обновлению мощности сигнала обнаружения. Более конкретно, WTRU может устанавливать мощность сигнала обнаружения на минимальную мощность сигнала обнаружения (например, PDISC(i)=PMIN,d) и сохранять результаты из накоплений команд TPC в виртуальном значении мощности (например, PDISC-V(i)). WTRU может применять принятые команды TPC к PDISC-V(i), тем самым поддерживая виртуальную мощность передачи. WTRU может быть сконфигурирован, чтобы устанавливать значение мощности сигнала обнаружения на PDISC-V(i), когда последнее становится выше, чем PMIN,d (например, когда PDISC-V(i)>PMIN,d, тогда PDISC(i)=PDISC-V(i)). WTRU может посылать в сеть отчет, указывающий, что достигнуто PMIN,d. Этот отчет может передаваться посредством сигнализации PHY, MAC или сигнализацию RRC. WTRU может быть сконфигурирован для передачи отчета только после того, как минимальная мощность обнаружения была использована в течение сконфигурированной величины времени (например, времени до запуска). Отчет может включать в себя запрос увеличения мощности. WTRU может прекращать процесс обнаружения и останавливать передачу сигналов обнаружения. WTRU может сообщать об этом событии на более высокие уровни (например, в сеть, на уровень приложений и т.п.). WTRU может быть сконфигурирован, чтобы освобождать ресурсы, ассоциированные с процессом обнаружения/передачей сигналов обнаружения, и сообщать об этом событии в сеть. WTRU может ожидать в течение сконфигурированного времени и запрашивать сеть о новом процессе обнаружения. WTRU может быть сконфигурирован, чтобы начинать контроль одного или более сконфигурированных указателей высоких помех (HI) D2D, например, передаваемых сетью (например, SIB и т.п.). После определения того, что указатель HI D2D больше не указывает наличие высоких помех, WTRU может передать новый запрос процесса обнаружения.
[0376] Мощность передачи сигнала обнаружения может быть ограничена максимальной мощностью PMAX,d сигнала обнаружения. В одном примере максимальная мощность сигнала обнаружения может быть ограничена, чтобы избежать помех с eNB обслуживающих или смежных сот или не создавать помех другим сигналам обнаружения. WTRU может определять значение PMAX,d. WTRU может принимать конфигурацию максимальной мощности сигнала обнаружения из сети, например, через RRC или другую (например, MAC, PHY, SIB и т.д.) сигнализацию. WTRU может устанавливать значение максимальной мощности сигнала обнаружения на PCMAX(i), максимальную мощность, определенную для сетевого канала данных или управления WTRU. WTRU может определять значение максимальной мощности сигнала обнаружения, например, как функцию последней мощности передачи для данных или управления. Например, мощность PMAX,d может быть выведена из последней мощности PUSCH, применяемой посредством WTRU.
[0377] Обновление мощности может не увеличивать мощность сигнала обнаружения выше указанного предела. Когда WTRU вычисляет мощность передачи, достигшую этого значения, WTRU может применять одну или несколько процедур. Например, WTRU может устанавливать мощность сигнала обнаружения на максимальное значение мощности сигнала обнаружения (например, PDISC(i)=PMAX,d). WTRU может прекратить накопление положительных команд TPC. WTRU может накапливать положительные команды TPC, как в нормальных операциях, но WTRU может быть сконфигурирован, чтобы не применять команды TPC к обновлению мощности сигнала обнаружения. Более конкретно, WTRU может устанавливать мощность сигнала обнаружения на максимальную мощность сигнала обнаружения (например, PDISC(i)=PMAX,d) и далее сохранять результаты из накоплений команд TPC в виртуальном значении мощности (например, PDISC-V(i)). WTRU может применять принятые команды TPC к PDISC-V(i), тем самым поддерживая виртуальную мощность передачи. WTRU может быть сконфигурирован, чтобы устанавливать значение мощности сигнала обнаружения на PDISC-V(i), когда последнее становится ниже, чем PMAX,d (например, когда PDISC-V(i)<PMAX,d, то PDISC(i)=PDISC-V(i)). WTRU может посылать в сеть отчет, указывающий, что достигнуто PMAX,d. Этот отчет может передаваться через сигнализацию PHY, MAC или RRC. В одном примере, WTRU может быть сконфигурирован для передачи отчета только после того, как максимальная мощность обнаружения была использована в течение сконфигурированного количества времени (например, времени до запуска). WTRU может начать сканировать сетевое сообщение, указывающее необходимую процедуру (например, остановить процедуру или увеличить мощность на X дБ). WTRU может запустить счетчик и остановить процедуру, если он не принял никакого сетевого сообщения, когда счетчик достиг заданного значения. WTRU может прекращать процесс обнаружения и останавливать передачу сигналов обнаружения. WTRU может сообщать об этом событии на более высокие уровни (например, в сеть, на уровень приложений и т.п.). WTRU может быть сконфигурирован, чтобы освобождать ресурсы, ассоциированные с процессом обнаружения/передачей сигналов обнаружения, и сообщать об этом событии в сеть. WTRU может ожидать в течение сконфигурированного количества времени и запрашивать сеть о новом процессе обнаружения.
[0378] WTRU, достигший PMIN,d и/или PMAX,d, может быть сконфигурирован, чтобы передавать сообщение регулировки планирования для своего сигнала обнаружения. Например, WTRU может запрашивать расширение или сокращение ширины полосы или изменение коэффициента числа повторений сигнала обнаружения.
[0379] WTRU может определять мощность передачи сигнала обнаружения. WTRU может определять мощность передачи сигнала обнаружения, основываясь на одном или нескольких параметрах или коэффициентах в любом порядке или комбинации.
[0380] Мощность передачи сигнала обнаружения может быть функцией номинальной мощности (например, PN-DISC) и одного или нескольких коэффициентов регулировки мощности сигнала обнаружения (например, Δj). Например, WTRU может вычислять мощность передачи сигнала обнаружения (например, PDISC(i)) на основе следующего уравнения (выраженного в дБ мВт):

[0381] Выбор коэффициентов регулировки мощности сигнала обнаружения (например, режима мощности) может быть основан на роли WTRU в обнаружении и/или на типе ресурса обнаружения.
[0382] WTRU может определять номинальную мощность PN-DISC. Например, WTRU может быть сконфигурирован с фиксированным значением PN-DISC, например, в спецификациях. WTRU может быть сконфигурирован со значением PN-DISC динамически/полустатически, например, через сеть. Конфигурация может сигнализироваться через сигнализацию RRC (например, через выделенную сигнализацию или через SIB), через сигнализацию MAC-уровня (например, через MAC CE) и/или PHY (например, через PDCCH, например, использующий новый формат DCI с явно определенным указанием мощности).
[0383] WTRU может определять значение PN-DISC, например, на основе текущей мощности, применяемой к сигналу или к сетевому каналу, такому как PUSCH, PUCCH, SRS, PRACH и т.п. Например, PN-DISC может быть выведено из последней мощности SRS, применяемой посредством WTRU.
[0384] Номинальная мощность может быть специфической для сети, соты, WTRU и/или процесса обнаружения. Определение ее значения может быть ассоциировано с периодом действительности. Например, WTRU может быть сконфигурирован для определения нового значения PN-DISC после смены лучшей соты или после истечения таймера. Номинальная мощность может быть ассоциированной с процессом обнаружения, и WTRU может быть сконфигурирован для ее получения в начале нового процесса обнаружения.
[0385] Номинальная мощность может быть обеспечена посредством ширины полосы опорного сигнала и/или может относиться к ней. Например, PN-DISC может относиться к мощности для ресурсного блока (RB) или поднесущей и/или предопределенному значению. WTRU может быть сконфигурирован, чтобы регулировать мощность передачи относительно ширины полосы сигнала обнаружения (например, путем масштабирования номинальной мощности отношением ширины полосы сигнала обнаружения к его опорной ширине полосы). Этого можно достичь с помощью одного из коэффициентов Δj.
[0386] Может быть определено более одного номинального значения, так что WTRU может выбирать одно из них для сигнала обнаружения. WTRU может выбирать значение номинальной мощности, основываясь на классе службы обнаружения, например, в соответствии с QoS, дальностью или любыми критериями близости, заданными для текущего процесса обнаружения. WTRU может быть сконфигурирован с множеством, например, тремя значениями номинальной мощности, например, ассоциированными с минимальной, средней и максимальной дальностью обнаружения (например, в соответствии с тремя различными классами служб). Значения номинальной мощности могут включать в себя статические параметры и/или динамические параметры, обеспеченные посредством RRC.
[0387] WTRU может определять класс обслуживания, например, путем считывания свойств процесса обнаружения, сконфигурированных более высокими уровнями или уровнем приложений.
[0388] WTRU может быть сконфигурирован с одним или несколькими коэффициентами регулировки мощности сигнала обнаружения (например, Δj). Эти коэффициенты могут быть статическими/полустатическими, могут вычисляться посредством WTRU или динамически обеспечиваться сетью через команды RRC (например, SIB), MAC (например, MAC CE) или PHY (например, через PDCCH). Они могут быть специфическими для сети, соты, WTRU или процесса обнаружения. Например, WTRU может быть сконфигурирован для определения нового значения одного или нескольких коэффициентов регулировки мощности сигнала обнаружения после смены лучшей соты или после истечения таймера. В одном примере коэффициенты регулировки мощности сигнала обнаружения могут быть ассоциированными с процессом обнаружения, и WTRU может быть сконфигурирован для их получения в начале нового процесса обнаружения.
[0389] В одном примере WTRU может быть сконфигурирован с одним или несколькими параметрами, специфическими для соты, связанными с коэффициентом регулировки мощности сигнала обнаружения, например, с помощью дополнительного IE в SIB2. IE, такой как IE Discovery_ConfigCommon в качестве части IE RadioResourceConfigCommon в SIB2 может быть использован для переноса релевантной информации. WTRU может быть сконфигурирован с другими параметрами, ассоциированными с коэффициентом регулировки мощности сигнала обнаружения через IE, такой как Discovery_ConfigDedicated, принимаемый как часть сообщения RRCConnectionSetup.
[0390] Коэффициенты регулировки мощности сигнала обнаружения могут обозначаться как Δj, где каждый коэффициент может быть ассоциированным с различным индексом j.
[0391] WTRU может определять коэффициент регулировки мощности сигнала обнаружения, основываясь на одном или нескольких свойствах или характеристиках сигнала обнаружения. Например, WTRU может определять коэффициент регулировки мощности сигнала обнаружения, основываясь на одном или более из следующего (в любом порядке или комбинации): формат сигнала обнаружения, MCS сигнала обнаружения, полезная нагрузка, роль сигнала обнаружения, ширина полосы сигнала обнаружения и/или другие факторы.
[0392] WTRU может быть сконфигурирован с одним или несколькими форматами или типами сигнала обнаружения. WTRU может определять формат сигнала обнаружения для использования для процесса обнаружения. В этом контексте WTRU может определять мощность PDISC(i) передачи сигнала обнаружения, основываясь на формате сигнала обнаружения. В одном примере, WTRU может быть сконфигурирован с коэффициентом регулировки мощности сигнала обнаружения для каждого из сконфигурированных форматов сигнала обнаружения. WTRU может определять значение коэффициента регулировки мощности сигнала обнаружения, основываясь на формате сигнала обнаружения.
[0393] WTRU может быть сконфигурирован с одним или несколькими свойствами сигнала обнаружения, такими как MCS или число битов в полезной нагрузке. В этом контексте WTRU может определять мощность PDISC(i) передачи сигнала обнаружения, основываясь на упомянутых свойствах. WTRU может вычислять коэффициент регулировки MCS с помощью:

где j_MCS может соответствовать (произвольному) индексу для этого коэффициента регулировки мощности сигнала обнаружения; ΔMCS может соответствовать коэффициенту регулировки мощности сигнала обнаружения для MCS сигнала обнаружения; BPRE может соответствовать числу битов на один ресурсный элемент в сигнале обнаружения; и Ks может соответствовать коэффициенту реализации, учитывающему ухудшение производительности в приемнике WTRU.
[0394] WTRU может быть сконфигурирован с некоторой ролью обнаружения (например, обнаруживаемый или контролирующий). В этом контексте, WTRU может определять мощность PDISC(i) передачи сигнала обнаружения, основываясь на своей роли обнаружения.
[0395] WTRU может быть сконфигурирован с некоторой шириной полосы сигнала обнаружения. Ширина полосы сигнала обнаружения может не быть динамическим фактором. WTRU может регулировать PDISC(i) с помощью смещения, связанного с шириной полосы сигнала. Например, смещение может соответствовать ширине полосы передачи, выраженной в виде одного или комбинации следующих параметров: число ресурсных блоков сигнала, число поднесущих сигнала и/или кратное число ширины полосы сигнала, используемое для вычисления PN-DISC.
[0396] WTRU может вычислять коэффициент регулировки мощности сигнала обнаружения, чтобы поддерживать спектральную плотность мощности сигнала обнаружения постоянной, независимо от его ширины полосы. Например, WTRU может получать номинальную мощность, соотнесенную с конкретной шириной полосы N сигнала. WTRU может вычислить, что выделенная ширина полосы сигнала обнаружения составляет M-кратное значение опорной ширины полосы. WTRU может применять положительное смещение, равное 10log10(M), к мощности сигнала обнаружения. Мощность сигнала обнаружения может поддерживаться постоянной, какой бы ни была ширина полосы сигнала. WTRU может быть сконфигурирован, чтобы не применять этот коэффициент.
[0397] WTRU может использовать другие параметры, такие как коэффициент повторения или режим скачкообразного изменения частоты для вычисления коэффициента регулировки мощности сигнала обнаружения.
[0398] WTRU может быть сконфигурирован для вычисления коэффициента регулировки компенсации потерь в тракте передачи для определения PDISC(i). Для выполнения такой компенсации потерь в тракте передачи, WTRU может быть сконфигурирован, чтобы оценивать потери в тракте передачи для опорного сигнала и может применять компенсацию к передаваемому сигналу.
[0399] WTRU может быть сконфигурирован, чтобы оценивать и использовать потери в тракте передачи к обслуживающей соты для целей компенсации потерь в тракте передачи. Это может гарантировать, что обслуживающая сота может контролировать сигнал обнаружения. WTRU может быть сконфигурирован, чтобы оценивать и использовать потери в тракте передачи к другому WTRU для целей компенсации потерь в тракте передачи. Это может гарантировать, что целевой WTRU принимает сигнал надлежащим образом для целей связи или для целей взаимного обнаружения. WTRU может быть сконфигурирован сетью с конкретным источником опорного сигнала (например, обслуживающая сота, другая сота, другой WTRU). Например, сигнализация источника опорного сигнала может быть неявной, например, основанной на конкретных правилах (например, WTRU всегда использует обслуживающую соту или самую сильную соту в качестве опорного сигнала для компенсации потерь в тракте передачи). Сигнализация может быть явно определенной, например, через сигнализацию RRC. Источник опорного сигнала может динамически обеспечиваться посредством сигнализации MAC или PHY (например, в DCI предоставления обнаружения в PDCCH). Источник опорного сигнала может приниматься через сигнал обнаружения WTRU (например, детектироваться посредством WTRU).
[0400] WTRU может быть сконфигурирован, чтобы частично компенсировать потери в тракте передачи. WTRU может быть сконфигурирован для применения дробного коэффициента (α) компенсации потерь в тракте передачи.
[0401] WTRU может определять действительный коэффициент регулировки потерь в тракте передачи, например, с использованием следующей формулы (например, в дБ мВт):

где j_PLC может соответствовать (например, произвольному) индексу для этого коэффициента регулировки мощности сигнала обнаружения; ΔPLC может соответствовать коэффициенту регулировки мощности сигнала обнаружения для компенсации потерь в тракте передачи; PDISC,Tx может соответствовать мощности передачи опорного сигнала; и PDISC,Rx может соответствовать оценке принятой мощности опорного сигнала, измеренной в WTRU. WTRU может быть сконфигурирован со значением мощности PDISC,Tx передачи опорного сигнала, например, с использованием одного или более из статического параметра, сконфигурированного посредством RRC, и/или динамически обеспечиваемого посредством сигнализации физического уровня (например, в DCI предоставления обнаружения в PDCCH).
[0402] WTRU может быть сконфигурирован для определения мощности передачи опорного сигнала, например, из полезной нагрузки, переносимой как часть сигнала обнаружения другого WTRU. Мощность передачи опорного сигнала (например, сигнала обнаружения другого WTRU) может быть встроена в сигнал обнаружения (в полезную нагрузку сигнала или может определяться неявным образом на основе свойств сигнала обнаружения). В примере неявного указания мощности сигнала обнаружения, обнаруживаемый WTRU может выбирать индекс циклического сдвига или корень последовательности Задова-Чу, основываясь на смещении мощности Tx от предопределенного номинального значения (например, [-6, -3, 0, +3, +6] дБ). Таблица отображения может быть предварительно задана в спецификациях или обеспечена более высокими уровнями. WTRU может быть сконфигурирован, чтобы определять индекс циклического сдвига сигнала обнаружения обнаруживаемого WTRU и определять смещение мощности переноса из справочной таблицы.
[0403] WTRU может определять PDISC,Rx, основываясь на измерениях принятой мощности. Например, WTRU может быть сконфигурирован, чтобы определять PDISC,Rx, основываясь на измерениях RSRP на одной или нескольких итерациях из сигнала обнаружения. WTRU может быть дополнительно сконфигурирован, чтобы использовать измерения, отфильтрованные более высокими уровнями.
[0404] WTRU может определять использование частичной или полной компенсации потерь в тракте передачи, основываясь на типе используемых ресурсов обнаружения. В одном примере WTRU может быть сконфигурирован с предоставлением обнаружения, соответствующим ресурсу мультиплексирования с кодовым разделением. WTRU может быть сконфигурирован, чтобы применять полную компенсацию потерь в тракте передачи.
[0405] WTRU может быть сконфигурирован, чтобы определять и применять коэффициент регулировки мощности сигнала обнаружения, связанный с помехами в его окрестности (например, ΔInterf). Коэффициент регулировки может определяться так, что дальность обнаружения может быть относительно постоянной, независимо от местоположения WTRU в соте. WTRU может использовать один или более из следующих подходов для определения регулировки мощности сигнала обнаружения, связанной с помехами, в любом порядке или комбинации.
[0406] WTRU может определять величину регулировки мощности сигнала обнаружения для применения, основываясь на измерениях.
[0407] WTRU может определять коэффициент регулировки, основываясь на измеренных потерях в тракте передачи от обслуживающего eNB. Например, более высокие потери в тракте передачи могут указывать, что WTRU находится ближе к краю соты и, таким образом, более восприимчив к помехам. WTRU может быть сконфигурирован с таблицей, отображающей одно или несколько пороговых значений потерь в тракте передачи на соответствующие коэффициенты регулировки. Таблица 2 представляет собой пример отображения между измерениями потерь в тракте передачи и соответствующей регулировкой мощности сигнала обнаружения. Значения в таблице (например, набор PLx, где x представляет собой индекс порога измерений потерь в тракте передачи, и действительные значения ΔInterf) могут быть заполнены, например, посредством более высоких уровней. В одном примере WTRU может быть сконфигурирован с одной или несколькими парами PL и ΔInterf и может быть сконфигурирован, чтобы интерполировать коэффициент регулировки мощности сигнала обнаружения, основываясь на измеренном значении PL.
Примерная таблица отображения потерь в тракте передачи на регулировку мощности сигнала обнаружения
[0408] WTRU может определять коэффициент регулировки на основе значения опережения тайминга от обслуживающего eNB. Например, более высокое опережение тайминга может указывать, что WTRU находится ближе к краю соты, и таким образом, более восприимчив к помехам. WTRU может быть сконфигурирован с таблицей, отображающей один или несколько порогов опережения тайминга на соответствующие коэффициенты регулировки. Таблица 3 представляет собой пример отображения между значениями опережения тайминга и соответствующей регулировкой мощности сигнала обнаружения. Значения в таблице (например, набор TAx, где x представляет собой индекс порога опережения тайминга, и действительные значения ΔInterf) могут быть заполнены, например, посредством более высоких уровней. В одном примере WTRU может быть сконфигурирован с одной или несколькими парами TA и ΔInterf и может быть сконфигурирован для интерполяции коэффициента регулировки мощности сигнала обнаружения на основе значения TA.
Примерная таблица отображения опережения тайминга на регулировку мощности сигнала обнаружения
Уровень помех может оцениваться, например, на основе оцененного местоположения WTRU.
[0409] WTRU может принимать коэффициент регулировки из сети и применять его. WTRU может принимать одно или несколько значений помех из обслуживающей и/или смежных сот. WTRU может быть сконфигурирован, чтобы объединять значения помех в глобальное значение помех. WTRU может быть сконфигурирован с таблицей, отображающей одно или несколько пороговых значений помех на соответствующие коэффициенты регулировки. Таблица 4 представляет собой пример отображения между значениями помех и соответствующей регулировкой мощности сигнала обнаружения. Значения в таблице (например, набор IVx, где x представляет собой индекс порога значения помех, и действительные значения ΔInterf) могут быть заполнены, например, посредством более высоких уровней. WTRU может быть сконфигурирован с одной или несколькими парами значения помех и ΔInterf, и может быть сконфигурирован, чтобы интерполировать коэффициент регулировки мощности сигнала обнаружения на основе значения помех.
Примерная таблица отображения значения помех на регулировку мощности сигнала обнаружения
[0410] Коэффициент регулировки мощности сигнала обнаружения может быть ассоциированным с типом ресурса, выделенного для процесса обнаружения. WTRU может применять коэффициент регулировки, основанный на типе ресурса, выделенного для сигнала обнаружения. WTRU может быть сконфигурирован, чтобы определять этот коэффициент регулировки, основываясь на динамичности ресурсов обнаружения, статически, полу-статически, динамически. WTRU может быть сконфигурирован, чтобы применять конкретный коэффициент регулировки для динамических предоставлений (когда управляющая служебная нагрузка, ассоциированная с этим типом сигнала, может обосновывать более высокую мощность передачи). WTRU может конфигурироваться с сигналом обнаружения, встроенным в субкадр связи D2D, или нет. WTRU может дополнительно конфигурироваться с одним коэффициентом регулировки для случая встраивания и с другим коэффициентом регулировки для случая не встраивания.
[0411] WTRU может быть сконфигурирован для определения коэффициента регулировки мощности сигнала обнаружения на основе его текущего уровня зарядки аккумулятора. WTRU может быть сконфигурирован с таблицей, отображающей один или несколько порогов уровня зарядки аккумулятора на соответствующие коэффициенты регулировки. Таблица 5 представляет собой пример отображения между уровнями зарядки аккумулятора и соответствующей регулировкой мощности сигнала обнаружения. Значения в таблице (например, набор BLx, где x представляет собой индекс порога уровня зарядки аккумулятора, и действительные значения ΔInterf) могут быть заполнены, например, посредством более высоких уровней. В одном примере WTRU может быть сконфигурирован с одной или несколькими парами уровня зарядки аккумулятора и ΔInterf и может быть сконфигурирован для интерполяции коэффициента регулировки мощности сигнала обнаружения на основе уровня зарядки аккумулятора.
Примерная таблица отображения уровня зарядки аккумулятора на регулировку мощности сигнала обнаружения
[0412] WTRU может быть сконфигурирован, чтобы определять и применять коэффициент регулировки мощности сигнала обнаружения, относящийся к одной или нескольким функциональным возможностям релевантного WTRU. В одном примере WTRU может быть сконфигурирован, чтобы использовать свой класс мощности (например, свою максимальную выходную мощность) для определения коэффициента регулировки мощности сигнала обнаружения (например, WTRU класса 3 может устанавливать свою мощность сигнала обнаружения, равной своей максимальной мощности (23 дБ мВт) минус конкретное смещение (например, 21 дБ). WTRU с функциональной возможностью ретранслятора может быть сконфигурирован для применения положительного коэффициента регулировки мощности сигнала обнаружения.
[0413] WTRU может быть сконфигурирован, чтобы определять и применять коэффициент регулировки мощности сигнала обнаружения, относящегося к приложению, исполняющему процесс обнаружения. Например, коэффициенты регулировки мощности сигнала обнаружения могут быть использованы в зависимости от класса приложений обнаружения, размещения рекламы, социальных сетей, чрезвычайных ситуаций и т.п. WTRU может быть сконфигурирован с таблицей, отображающей один или несколько классов приложений на соответствующие коэффициенты регулировки. Таблица 6 представляет собой пример отображения между классами приложений и соответствующей регулировкой мощности сигнала обнаружения. Значения в таблице могут быть заполнены, например, посредством более высоких уровней.
Примерная таблица отображения класса приложений на регулировку мощности сигнала обнаружения
сигнала обнаружения (ΔApp-class)
[0414] Мощность для сигнала обнаружения может быть динамически управляемой. WTRU может определять опорную или начальную мощность для сигнала обнаружения, которая может регулироваться. WTRU может быть сконфигурирован, чтобы принимать свой коэффициент регулировки от eNB, чтобы принимать свой коэффициент регулировки от другого WTRU и/или чтобы вычислять коэффициент регулировки внутренним образом (например, в случае наращивания мощности).
[0415] Мощность сигнала обнаружения может регулироваться, например, через явно определенную сигнализацию. Может приниматься команда TPC. Коэффициент(ы) регулировки может (могут) приниматься от eNB. WTRU может быть сконфигурирован, чтобы принимать обновления мощности, относящиеся к процессу обнаружения, из сети через RRC (например, через обновление SIB), MAC (например, через элемент управления MAC) и/или PHY (например, посредством некоторых конкретных форматов DCI, идентифицированных посредством RNTI D2D). Коэффициенты регулировки могут приниматься от другого WTRU.
[0416] WTRU может быть сконфигурирован для приема обновлений мощности, относящихся к процессу обнаружения, от другого WTRU через канал управления или данных D2D. WTRU может быть сконфигурирован, чтобы декодировать обновление мощности из свойства сигнала обнаружения. В одном примере контролирующий WTRU может отвечать обнаруживаемому WTRU запросом обновления мощности для следующей передачи сигнала обнаружения. Контролирующий WTRU может быть сконфигурирован для использования сигнала обнаружения SRS. Контролирующий и обнаруживаемый WTRU могут конфигурироваться с таблицей, отображающей один или несколько индексов циклического сдвига SRS на соответствующие запросы обновления мощности. Таблица 7 представляет собой пример отображения между значениями циклического сдвига и соответствующими запросами обновления мощности. Значения в таблице могут быть заполнены, например, посредством более высоких уровней.
Примерная таблица отображения индекса циклического сдвига на запрос обновления мощности сигнала обнаружения
сигнала обнаружения
[0417] WTRU может применять обновление мощности, назначенное в команде TPC, к опорной мощности сигнала обнаружения, которая может соответствовать одному или комбинации мощности передачи, сконфигурированной минимальной мощности и/или начальной мощности, статически определенной или предоставленной более высокими уровнями.
[0418] WTRU может быть сконфигурирован, чтобы использовать мощность PDISC(i) передачи в качестве опорной мощности. WTRU может дополнительно конфигурироваться, чтобы определять регулировку мощности следующим образом:
PDISC(i)=Max(PMIN,d, Min(PMAX,d,PDISC(i)+f(i)))
где f(i) - состояние регулировки управления мощностью сигнала обнаружения.
[0419] В режиме накопления WTRU может быть сконфигурирован, чтобы определять f(i) следующим образом:

[0420] В абсолютном режиме WTRU может быть сконфигурирован, чтобы определять f(i) следующим образом:
[0421] В (15) и (16), δ(i) может соответствовать команде обновления мощности, принимаемой WTRU при индексе i, и K является смещением; i и K могут соответствовать одному или более из номера кадра, номера субкадра, индекса ресурса обнаружения (например, субкадра, символа и т.п.) или индексу последовательности сигнала обнаружения. Число K может определяться на основе дуплексной конфигурации или конфигурации TDD. Число K может быть равно или больше 4 субкадров, чтобы учесть время ожидания декодирования TPC. WTRU может быть сконфигурирован, чтобы выбирать K согласно типу структуры кадра и конкретной конфигурации субкадра в случае TDD.
[0422] WTRU может быть сконфигурирован, чтобы устанавливать f(i) на 0 или на опорную начальную мощность. WTRU может определять параметры f(0), K, а также режим ТРС (например, с накоплением или абсолютный). Определение может быть основано на значении, статистически определенном для сети, конфигурации через RRC и/или динамически предоставленном значении через сигнализацию МАС или PHY (например, в DCI предоставления обнаружения в PDCCH).
[0423] WTRU может быть сконфигурирован, чтобы переустанавливать накопление f(i) на основе одного или любой комбинации триггеров, таких как явное указание переустановки, обеспечиваемое посредством eNB, обнаружение множества WTRU, достигнуто некоторое значение счетчика (например, в субкадрах или абсолютном времени), WTRU изменил свою обслуживающую соту, новая номинальная мощность была указана более высокими уровнями, изменился тип сигнала обнаружения, и/или изменилась ширина полосы сигнала обнаружения.
[0424] В процедуре наращивания мощности, WTRU может быть сконфигурирован, чтобы обновлять мощность PDISC(i) передачи сигналов обнаружения следующим образом:
PDISC(i)=Min(PpowerRampingMax, PpowerRampingRef + FLOOR(i/ powerRampingPeriod)*powerRampingStep)
где PpowerRampingMax может соответствовать максимальной мощности, PpowerRampingRef может соответствовать опорной (например, начальной) мощности, powerRampingPeriod может соответствовать периоду обновления, и powerRampingStep может соответствовать значению приращения мощности.
[0425] WTRU может быть сконфигурирован для получения различных параметров процедуры наращивания мощности, таких как PpowerRampingMax, PpowerRampingRef, powerRampingPeriod и powerRampingStep. Эти параметры могут определяться статически, например, сетью, конфигурироваться посредством RRC и/или динамически обеспечиваться посредством сигнализации MAC или PHY (например, в DCI предоставления обнаружения в PDCCH).
[0426] WTRU может быть сконфигурирован, чтобы устанавливать опорную мощность PpowerRampingRef на основе одного или комбинации из мощности передачи, конфигурируемой минимальной мощности и/или начальной мощности, статически определенной или обеспеченной более высокими уровнями.
[0427] WTRU может быть сконфигурирован, чтобы устанавливать максимальное значение PpowerRampingMax мощности на основе одного или комбинации из мощности передачи, конфигурируемой максимальной мощности и/или максимальной мощности, статически определенной или обеспеченной более высокими уровнями.
[0428] WTRU может быть сконфигурирован, чтобы применять параметр powerRampingPeriod в одном или более из номера кадра, номера субкадра, индекса ресурса обнаружения (например, субкадра, символа и т.п.) и/или индекса последовательности сигнала обнаружения.
[0429] WTRU может быть сконфигурирован, чтобы запускать наращивание мощности сигнала обнаружения на основе одного или более из следующих условий: когда WTRU передает первый сигнал обнаружения процесса обнаружения; явное указание наращивания мощности обеспечивается посредством eNB; достигнуто некоторое значение счетчика (в субкадрах или абсолютном времени); WTRU изменил свою обслуживающую соту, новая номинальная мощность была указана более высокими уровнями, изменился тип сигнала обнаружения, и/или изменилась ширина полосы сигнала обнаружения.
[0430] WTRU может быть сконфигурирован, чтобы останавливать наращивание мощности сигнала обнаружения на основе одного или любой комбинации триггеров, таких как: было достигнуто максимальное значение мощности процесса наращивания; явное указание остановки обеспечивается посредством eNB; обнаружено множество WTRU; достигнуто некоторое значение счетчика (в субкадрах или абсолютном времени), и/или WTRU принимает ответ от контролирующего WTRU.
[0431] При остановке наращивания мощности, WTRU может сохранять сигнал обнаружения на той же мощности в течение периода, который может быть определен на основе одного или любой комбинации из следующих условий: счетчик (например, субкадров, субкадров обнаружения или абсолютного времени), запущенный при событии остановки; максимальное число повторных передач (например, отсчет счетчика увеличиваются для каждой повторной передачи или для каждых x повторных передач) до явного указания переустановки из сети; WTRU изменил свою обслуживающую соту, и/или новая номинальная мощность была указана более высокими уровнями.
[0432] WTRU может быть сконфигурирован, чтобы переустанавливать наращивание мощности сигнала обнаружения на основе одного или любой комбинации триггеров, таких как: явное указание переустановки обеспечивается посредством eNB, обнаружено множество WTRU, достигнуто некоторое значение счетчика (в субкадрах или абсолютном времени), WTRU изменил свою обслуживающую соту, новая номинальная мощность была указана более высокими уровнями, изменился тип сигнала обнаружения, и/или изменилась ширина полосы сигнала обнаружения.
[0433] WTRU может выполнять одиночное обнаружение. WTRU может быть сконфигурирован, например, статически, со свойствами сигнала обнаружения (например, статический и уникальный сигнал SRS на 24 RB). WTRU может быть сконфигурирован, например, статически, с параметрами PMIN,d и PMAX,d. WTRU может быть сконфигурирован, например, статически, с коэффициентом Δ1 регулировки до PN-DISC для X критериев близости (например, [-3, 0, +3 дБ] для минимальной, средней и максимальной дальности обнаружения).
[0434] WTRU может сканировать (например, непрерывно) PN-DISC (например, специфическую для соты) в SIB2 и применять последнее значение. Приложение WTRU может запрашивать исполнение процесса обнаружения с максимальной дальностью. WTRU может передавать запрос процесса обнаружения в сеть (например, через сигнализацию RRC). WTRU может принимать ответ сети на запрос (например, через сигнализацию RRC), включающий в себя параметр, указывающий, что для данного процесса разрешена автономная компенсация помех. WTRU может выбирать коэффициент Δ1 регулировки согласно критериям близости, обеспечиваемым приложением обнаружения. WTRU может измерять уровень помех в своем локальном окружении. WTRU может определять коэффициент ΔInterf регулировки c использованием таблицы отображения. WTRU может вычислять мощность передачи сигнала обнаружения следующим образом:
PDISC(i)=Max(PMIN,d, Min(PN-DISC + Δ1 + ΔInterf,PMAX,d))
WTRU может принимать динамическое предоставление (например, указанное посредством D-RNTI), относящееся к этому процессу обнаружения. WTRU может передавать выбранную последовательность SRS при PDISC(i) в соответствующем предоставлении.
[0435] WTRU может выполнять множество одиночных и групповое обнаружение с наращиванием мощности. WTRU может передавать в сеть запрос процесса обнаружения, указывающий параметр QoS (например, посредством сигнализации RRC). WTRU может принимать из сети (например, посредством сигнализации RRC) конфигурацию процесса обнаружения, указывающую тип сигнала (например, PRACH), ширину полосы сигнала (например, 6 RB), указание режима наращивания мощности, начальную или максимальную мощность для наращивания, как, например, PpowerRampingRef и PpowerRampingMax, период наращивания powerRampingPeriod (например, 2 субкадра обнаружения), смещение наращивания мощности powerRampingStep (например, 1 дБ) и/или идентификаторы пяти контролирующих WTRU.
[0436] WTRU может применять значение PpowerRampingRef к первой мощности передачи сигнала обнаружения. WTRU может применять коэффициент регулировки 1 дБ каждые 2 субкадра обнаружения вплоть до PpowerRampingMax. WTRU может обнаружить 4 WTRU перед достижением максимальной мощности наращивания. WTRU может посылать в сеть сообщение, показывающее, что значение PpowerRampingMax достигнуто. WTRU может запускать счетчик (получающий приращение на каждый субкадр обнаружения) и может оставаться на значении PpowerRampingMax до тех пор, пока он не примет ответ из сети или пока не достигнет предела счетчика. WTRU может принимать из сети ответ, указывающий остановку процесса обнаружения (например, потому, что текущий уровень помех в соте может не позволить превысить значение PpowerRampingMax). WTRU может останавливать процесс обнаружения.
[0437] WTRU может выполнять множество одиночных обнаружений с замкнутым контуром eNB. WTRU может выполнять одиночное обнаружение. WTRU может быть сконфигурирован, например, статически со свойствами сигнала обнаружения (например, статического и уникального сигнала SRS на 24 RB), PMIN,d и PMAX,d и/или номинальной мощностью PN-DISC, ассоциированной с сигналом обнаружения.
[0438] WTRU может передавать в сеть запрос процесса обнаружения, указывающий параметр QoS (например, посредством сигнализации RRC). WTRU может принимать из сети конфигурацию процесса обнаружения, указывающую статическое распределение ресурсов. WTRU может передавать сигнал обнаружения с PDISC(i)=PN-DISC в каждом выделенном ресурсе i. Во время процесса обнаружения, WTRU может принимать из сети команды TPC, указывающие накопленные отрицательные смещения, которые должны применяться к PDISC(i) (например, когда сеть измеряет высокий уровень помех). После n субкадров обнаружения, WTRU может вычислить, что PDISC(i)=PN-DISC. WTRU может останавливать передачу сигналов обнаружения и может посылать в сеть сообщение, показывающее, что достигнуто значение PMIN,d. WTRU может информировать более высокие уровни о том, что процесс обнаружения был временно остановлен. WTRU может начать сканировать указатель HI D2D в SIBn. WTRU может запустить счетчик, чтобы ограничить максимальную длительность этого сканирования. WTRU может определить, что указатель HI сброшен в 0 в SIBn. WTRU может передавать в сеть новый запрос обнаружения.
[0439] Первый WTRU может обнаруживать второй WTRU через процесс обнаружения. WTRU может быть сконфигурирован, например, статически со свойствами сигнала обнаружения (например, статического и уникального сигнала SRS на 24 RB). WTRU может быть сконфигурирован, например, статически с параметрами PMIN,d и PMAX,d. WTRU может быть сконфигурирован, например, статически с номинальной мощностью PN-DISC, ассоциированной с сигналом обнаружения.
[0440] WTRU, такой как UE1, может передавать в сеть запрос процесса обнаружения. UE1 может принимать из сети конфигурацию процесса обнаружения, указывающую статическое распределение ресурсов. UE1 может передавать сигнал обнаружения при PDISC(i)=PN_DISC на ресурсе i обнаружения. Второй WTRU, такой как UE2, может декодировать сигнал обнаружения и может вычислять потери в тракте передачи, основываясь на статической мощности PN-DISC передачи. UE2 может измерять качество сигнала обнаружения ниже некоторого порогового значения. UE2 может отображать это качество сигнала на запрос (δ1) обновления мощности для следующей передачи сигнала обнаружения. UE2 может выбирать свой сигнал обнаружения на основе запроса смещения мощности, например, с использованием таблицы 7. UE2 может применять полную компенсацию потерь в тракте передачи к своей мощности (ΔPLC) передачи сигнала обнаружения и передавать свой сигнал обнаружения на PDISC(i+1)=PN_DISC + ΔPLC. UE1 может декодировать этот сигнал и может идентифицировать запрос повышения мощности. UE1 может передавать другой сигнал обнаружения при PDISC(i+2)= PN_DISC + δ1.
[0441] Сигнал обнаружения может включать в себя избыточную секцию (например, циклический префикс, основанный на субкадре, как иллюстрируется на фиг. 18). Сигнал обнаружения может иметь защитный временной интервал перед и/или после сигнала, например, как иллюстрируется на фиг. 19. Защитный временной интервал в конце сигнала обнаружения может быть искусственно создан посредством смещения опережения тайминга.
[0442] Искаженное время приемника в начале сигнала обнаружения, ΔL, может быть больше или равно ΔS. Независимо от своего местоположения, контролирующий WTRU может не видеть первую секцию ΔS сигнала обнаружения (например, в предположении передачи с таймингом UL). Следовательно, можно уменьшить размер сигнала обнаружения и потребление мощности передачи, не влияя на производительность приема. Этого можно достичь путем добавления защитного временного интервала, равного ΔS, в начале сигнала обнаружения.
[0443] Чтобы компенсировать наихудший случай (ΔL)MAX, избыточная секция может быть использована в сигнале обнаружения, так что приемник способен правильно декодировать сигнал обнаружения, независимо от условий распространения. Если используется защитный временной интервал, равный ΔS, то избыточная секция может быть определена посредством: (ΔL)max=TP1max+TP2max. Если защитный временной интервал не используется, то избыточная секция может быть расширена до (ΔL)max=TP1max+TP2max+ΔS. Чтобы компенсировать наихудший случай, (ΔP)MAX в FDM, длительность расширенного циклического префикса, равная TP1max+TP2max (что может быть заменено на 2Rcmax/3×108, чтобы охватить наихудший случай), может быть использована для субкадров сигнала обнаружения (сигналы FDM могут использовать расширенный циклический префикс в субкадре). Для ограничения максимальной разности тайминга между сигналами FDM, может быть использовано управление помехами.
[0444] В процедурах обнаружения WTRU, защитный временной интервал может создаваться путем применения смещения опережения тайминга к передаче сигнала обнаружения. Это смещение может быть обеспечено сетью или вычислено обнаруживаемым WTRU. Процесс обнаружения может планироваться на субкадре n.
[0445] Обнаруживаемый WTRU может передавать сигнал обнаружения, включающий в себя статический защитный временной интервал или избыточную секцию сигнала, например, в начале сигнала. Его размер может быть основан на фиксированном сетевом значении, представляющем собой максимальное разрешенное время ожидания ΔS переключения WTRU. Обнаруживаемый WTRU может передавать сигнал обнаружения, включающий в себя статический защитный временной интервал или избыточную секцию сигнала в конце сигнала. Размер сигнала обнаружения может быть основан на фиксированном сетевом значении, представляющем собой максимальное разрешенное время ожидания ΔS переключения WTRU. Обнаруживаемый WTRU может передавать сигнал обнаружения, включающий в себя защитный временной интервал, объединенный с избыточной секцией сигнала в начале и/или в конце сигнала обнаружения. Обнаруживаемый WTRU может выбирать и/или определять размер защитного временного интервала, размер избыточной секции и значение циклического сдвига (например, для последовательности Задова-Чу), основываясь на ΔS-(TP1+TP2), (TP1+TP2) и (TP1+TP2), соответственно. Значение TP1 может быть функцией размера соты и может быть равно значению TA обнаруживаемого WTRU, принятому из сети. Размер соты может статически задаваться равным его максимальному значению, например, Rcmax/3×108. Размер соты также может косвенно выводиться из параметра, ассоциированного с размером соты (размера циклического префикса, конфигурации PRACH и т.п.). TP2 может быть равно максимальному значению TA группы контролирующих WTRU (например, в случае, когда к процессу обнаружения применяется предварительный выбор). Значение TP2 может распределяться сетью в течение конфигурирования процесса обнаружения и/или передаваться на уровне приложений. TP2 может быть функцией размера соты и может, например, статически задаваться равным его максимуму Rcmax/3×108, и/или косвенно выводиться из параметра, ассоциированного с размером соты (например, размера циклического префикса, конфигурации PRACH и т.п.). Значения могут быть аппроксимированы до размера ближайшего символа.
[0446] Обнаруживаемый WTRU может использовать символ зондирования на конце субкадра обнаружения для создания защитного временного интервала. WTRU может комбинировать символ зондирования с отрицательным смещением опережения тайминга на сигнале обнаружения для создания искусственного защитного временного интервала в начале субкадра.
[0447] Параметры сигнала обнаружения, такие как защитный временной интервал, избыточная секция и циклический сдвиг, могут вычисляться посредством WTRU на основе статических параметров и/или системных или выделенных параметров, обеспечиваемых сетью. Параметры сигнала обнаружения могут вычисляться сетью и передаваться в WTRU. Два способа вычисления могут быть объединены, например, сеть может обеспечивать значение защитного временного интервала, а WTRU может вычислять избыточную секцию и циклический сдвиг. Избыточность сигнала может помещаться внутри полезной нагрузки сигнала обнаружения с использованием скорости кодирования, основанной на ожидаемых условиях распространения. Например, для WTRU, которые находятся близко к eNB, TP1 и TP2 могут быть малыми, и может быть использована более высокая скорость кодирования, поскольку контролирующий WTRU может быть способным декодировать большую часть сигнала обнаружения.
[0448] В случае добавления или удаления предварительно выбранных WTRU в процедуре обнаружения, обнаруживаемый WTRU может принимать из сети обновления на используемом сигнале обнаружения на основе максимального значения TP2. Обнаруживаемый WTRU может непосредственно обновлять свой сигнал, основываясь на информации предварительного выбора. Например, обнаруживаемый WTRU может первоначально принимать список WTRU, вовлеченных в процесс обнаружения, с их соответствующими значениями TA. WTRU может принимать уведомление, указывающее, что WTRU может не быть вовлеченным в процесс. WTRU может удалять соответствующее TA из своего списка и обновлять свой сигнал обнаружения, соответственно.
[0449] WTRU в режиме ожидания RRC (RRC_IDLE) или WTRU в соединенном режиме RRC (RRC_CONNECTED), который может быть не синхронизированным, может выбирать конкретный сигнал обнаружения, спроектированный более устойчивым к неточностям тайминга. WTRU в режиме RRC_IDLE или WTRU в режиме RRC_CONNECTED, который не синхронизирован, может использовать конкретные ресурсы обнаружения, чтобы гарантировать, что он не создает помехи для сетевых коммуникаций.
[0450] Контролирующий WTRU может получать набор параметров сигнала обнаружения (например, размер избыточной секции и т.п.) из сети (например, из системной или выделенной информации). Контролирующий WTRU может использовать значения ΔS, TP1 и TP2, чтобы регулировать свои параметры приема, например, чтобы открывать и/или закрывать окно приема (частоту UL), для улучшения декодирования сигнала обнаружения (например, чтобы объединять избыточные секции). TP1 в контролирующем WTRU может быть равно значению TA обнаруживаемого WTRU, обеспеченному сетью. TP2 может быть равно максимальному значению TA группы контролирующих WTRU. TP1 и TP2 могут быть функцией размера соты и могут, например, статически задаваться равными его максимальному значению (Rcmax/3×108) и/или косвенно выводиться из параметра, ассоциированного с размером соты (например, размера циклического префикса, конфигурации PRACH и т.п.).
[0451] Контролирующий WTRU, запланированный для сетевой связи в субкадре (n-1), может открывать окно приема сигнала обнаружения при ΔS после начала субкадра (n), тогда как WTRU, не запланированный для сетевой связи в субкадре (n-1), может переключаться на частоту UL при ΔS перед началом субкадра (n). Контролирующий WTRU, запланированный для сетевой связи в субкадре (n+1), может переключаться на свою частоту DL при ΔS перед началом субкадра (n+1).
[0452] Контролирующий WTRU может использовать сетевую опору синхронизации, чтобы выводить время передачи сигнала обнаружения. Например, контролирующий WTRU может знать сетевое опорное время из значения опережения тайминга, обеспеченного сетью. Контролирующий WTRU может принимать из сети значение опережения тайминга обнаруживаемого WTRU. Основываясь на принятом значении опережения тайминга, контролирующий WTRU может выводить время передачи сигнала обнаружения. Контролирующий WTRU может вычислять момент времени синхронизации принятого сигнала обнаружения (например, через автокорреляцию или кросс-корреляцию опорного шаблона). Контролирующий WTRU может выводить время распространения из времени передачи и момента времени синхронизации принятого сигнала обнаружения.
[0453] Контролирующий WTRU может задавать статус RF близости (или расстояние связи D2D), основываясь на вычислении времени распространения D2D, объединенного или не объединенного с другими метриками сигнала (например, RSRP, RSRQ, потерями в тракте передачи и т.п.). Контролирующий WTRU, который не способен надлежащим образом декодировать сигнал обнаружения из-за проблем тайминга (например, в случае, когда уровень энергии может быть корректным, но размер сигнала может быть короче заданного порога), может запрашивать сеть о регулировке настроек сигнала обнаружения (например, тайминга, избыточности и т.д.).
[0454] Контролирующий WTRU в режиме RRC_IDLE может не иметь действительного значения TA и может использовать вместо этого функцию размера соты. Например, значение TA может статически задаваться равным его максимальному значению (Rcmax/3×108) и/или косвенно выводиться из параметра, ассоциированного с размером соты (размера циклического префикса, конфигурации PRACH и т.п.).
[0455] Сеть может использовать смещение символа в управляющей информации для контролирующего WTRU в субкадре (n+1) (например, R-PDCCH или ePDCCH). В этом случае, первые символы в субкадре (n+1) могут не быть декодированы. Такое ограничение планирования может быть задано при проектировании. Например, WTRU, запланированный для процесса обнаружения на субкадре n, может планироваться для сетевой связи на субкадре (n+1) посредством ePDCCH. Ограничение планирования может быть обеспечено сетью, например, во время конфигурирования процесса обнаружения. Контролирующий WTRU может декодировать весь сигнал обнаружения в субкадре (n) перед переключением обратно на частоту DL в субкадре (n+1).
[0456] Сеть может дополнительно добавлять ограничения планирования для контролирующего WTRU, например, никакое сетевое планирование DL не может обеспечиваться в субкадре (n-1), так что контролирующий WTRU может переключаться на частоту UL в субкадре (n)-ΔS. Никакое сетевое планирование DL или управляющая информация не могут обеспечиваться в субкадре (n+1), так что контролирующий WTRU может оставаться на частоте UL, чтобы декодировать весь сигнал обнаружения.
[0457] В случае TDD, проблема времени ожидания переключения может быть подобной случаю FDD. Время ожидания переключения частоты, ΔS, может быть равно времени переключения с передачи (Tx) на прием (Rx) или с Rx на Tx (например, когда частота может оставаться той же самой). Дополнительные процедуры, используемые для случая TDD, могут включать в себя, например, случаи, в которых субкадр n-1 является специальным субкадром TDD, и/или в которых субкадр n+1 является субкадром DL. Если субкадр n-1 является специальным субкадром TDD, то контролирующий WTRU с процессом обнаружения, запланированным после специального субкадра TDD (DwPTS/GP/UpPTS), может оставаться в состоянии Rx в течение специального субкадра (GP и UpPTS) и принимать сигнал обнаружения, не испытывая влияния времени ожидания переключения. Этот способ может предотвратить сетевое распределение UL для контролирующего WTRU на UpPTS. Если субкадр n+1 является субкадром DL, то обнаруживаемый WTRU может учитывать, что ΔS равно нулю, затем использовать способы обнаружения WTRU, например, чтобы выбрать или определить сигнал обнаружения. Контролирующий WTRU может декодировать весь субкадр (n) обнаружения, поскольку WTRU не может переключиться назад в состояние передачи до конца субкадра.
[0458] Контролирующий WTRU может посылать ответ к обнаруживаемому WTRU после детектирования RF близости. В этом случае контролирующий WTRU может использовать конкретный тайминг передачи (например, тайминг, отличающийся от его текущего сетевого тайминга UL). Например, контролирующий WTRU может выводить опорное время Tref DL обнаруживаемого WTRU путем приема из сети опережения тайминга, ассоциированного с обнаруживаемым WTRU, или посредством временной метки, вставленной в сигнал обнаружения. Контролирующий WTRU может получать время TPd распространения D2D. Контролирующий WTRU может передавать свой ответ в момент Tref-TPd+ΔS.
[0459] Обнаруживаемый WTRU может непосредственно выбирать, или принимать из сети, одно или несколько значений мощности, включая, например, начальную мощность передачи сигнала обнаружения, минимальную мощность передачи сигнала обнаружения и/или максимальную мощность передачи сигнала обнаружения. Эти принятые значения мощности могут быть основаны, например, на одном или более из диапазона RF обнаружения; текущего уровня помех сети; количества ресурсов, выделенных для сигнала обнаружения; текущего опережения тайминга WTRU; типа распределения сигнала (которое может быть свободным от конкуренции или основанным на конкуренции); числа параллельных процессов обнаружения или значения приоритета, ассоциированного с процессом обнаружения.
[0460] Текущий уровень помех сети может предоставляться сетью во время конфигурирования обнаружения или на основе измерений WTRU. Количество ресурсов, назначенных сигналу обнаружения, может включать в себя ресурсы по частоте, времени и/или пространству. Текущее значение опережения тайминга WTRU может быть использовано, например, для увеличения мощности передачи, чтобы противодействовать более высокому уровню помех на краях соты. Значение TA может быть использовано для уменьшения мощности передачи, например, чтобы не усиливать уровень помех. Такие правила могут динамически переключаться, основываясь, например, на условиях сети. Если применяется предварительный выбор контролирующего WTRU, то может быть использовано TA контролирующих WTRU. Как описано здесь, знание TA для обнаруживаемого и контролирующего WTRU может обеспечить верхний предел максимального расстояния между WTRU. Максимальная мощность передачи WTRU, например, запас, может быть зарезервирована для возможных будущих коммуникаций D2D.
[0461] В случае множества передач сигналов обнаружения, регулировки мощности могут определяться обнаруживаемым WTRU или посылаться сетью между передачами (например, обмен сообщениями PDCCH или RRC). Такие регулировки мощности могут быть основаны, например, на числе событий детектирования близости, отчетах контролирующих WTRU (например, метриках принятых сигналов, уровне помех и т.п.), отчетах о помехах из других eNB (например, чтобы снизить помеху на заданном ресурсе) и/или обновлении значений мощности, числе итераций передач сигнала обнаружения (например, наращивания мощности). Максимальное значение мощности может быть ограничено статическим параметром или обеспечиваться во время конфигурирования обнаружения.
[0462] Такие параметры мощности могут объединяться многими способами, например, обнаруживаемый WTRU может увеличивать свою мощность вплоть до номинальной мощности (отнесенной к максимальному диапазону обнаружения), но может останавливать наращивание мощности, если по меньшей мере n WTRU сообщают о RF близости. Наращивание мощности может быть ограничено по времени.
[0463] Обнаруживаемый WTRU может передавать один или несколько сигналов UL параллельно сигналу обнаружения. В таком случае, обнаруживаемый WTRU может вычислять мощность, которая должна выделяться для сигналов UL, основываясь на “процедурах физического уровня”, как обеспечено, например, в Технической Спецификации 26.213 Проекта партнерства третьего поколения (3GPP). Обнаруживаемый WTRU может вычислять мощность, которая должна выделяться для сигнала обнаружения. Если полная мощность передачи WTRU превышает максимальную выходную мощность WTRU, то WTRU может масштабировать мощность (Pdiscovery) сигнала обнаружения согласно следующему уравнению:

Значения мощности, описанные в уравнении (12), могут быть линейными, коэффициенты w(i) могут представлять собой коэффициенты масштабирования, относящиеся к передаче PUSCH, как определено, например, в 3GPP TS 26.213. α может представлять собой коэффициент масштабирования для мощности сигнала обнаружения. Этот коэффициент может быть известен из проектирования или может быть предоставлен сетью для соты или для данного процесса обнаружения.
[0464] Контролирующий WTRU может посылать ответ на сигнал обнаружения после детектирования RF близости. В этом случае, контролирующий WTRU может использовать конкретный уровень мощности передачи, основываясь на параметрах, включающих в себя, например, частичную компенсации потерь в тракте передачи и/или время распространения между обнаруживаемым и контролирующим WTRU (например, относящееся к расстоянию D2D). Мощность передачи сигнала обнаружения может быть известна из проектирования, приниматься из сети или предоставляться в сигнале обнаружения (например, внутри полезной нагрузки или ассоциирована с опорным шаблоном). Принятая мощность сигнала может быть основана на измерении принятой мощности опорного сигнала (RSRP). Доля потерь в тракте передачи для компенсации может быть обеспечена сетью для этого процесса обнаружения или может быть статическим параметром.
[0465] Контролирующий WTRU может учитывать минимальный запас (например, разность между номинальным и максимально допустимым значением мощности) с его максимальной мощностью передачи перед передачей ответа. Запас можно вычислить, например, основываясь на максимальной частоте пакетных ошибок, определенной для связи D2D. Запас может учитывать минимальный баланс мощности, зарезервированный для параллельных сетевых передач. Если запас недостаточный, то контролирующий WTRU может пропустить свой ответ (например, в случае, когда за обнаружением должна последовать связь D2D). Также можно применять другие параметры значения мощности для описанного здесь обнаруживаемого WTRU.
[0466] Совместные процедуры могут быть использованы для компенсации эффекта “ближний - дальний” на контролирующем WTRU в сети. Сеть может использовать различные механизмы для достижения такой компенсации. Например, мультиплексирование с частотным разделением (FDM) или мультиплексирование с кодовым разделением (CDM) могут быть использованы в процессах обнаружения, расположенных далеко друг от друга (например, eNB может использовать для распределения назначения информацию опережения тайминга, информацию грубого определения местоположения и т.п.). Процессы, близкие друг к другу, могут использовать различные ресурсы мультиплексирования с временным разделением (TDM). Сеть может переключаться на выделенные ресурсы (TDM) или изменять ресурсы FDM/CDM, основываясь на частоте неудач обнаружения для заданного процесса обнаружения. Сеть может переключать роль обнаруживаемого/контролирующего WTRU, основываясь на уровне помех в каждом WTRU. В этом случае, обнаруживаемый WTRU может брать на себя роль контролирующего WTRU, и контролирующий WTRU может брать на себя роль обнаруживаемого WTRU. Остальные параметры обнаружения могут оставаться неизменными, чтобы ограничивать служебную нагрузку управления.
[0467] Обнаруживаемый WTRU может переключать свой шаблон скачкообразного изменения частоты для рандомизации помех. Этот шаблон может предоставляться сетью в контролирующие WTRU, или контролирующие WTRU могут использовать слепое декодирование на наборе ресурсов.
[0468] Различные совместные методы могут быть приняты, чтобы избежать эффекта “ближний - дальний” в приемнике eNB. Когда WTRU имеет значение опережения тайминга, которое, например, ниже, чем заданный порог, eNB может ограничить свою роль контролирующей ролью. Такому WTRU может не разрешаться запрашивать роль обнаруживаемого. Когда два WTRU, например, имеющие значения опережения тайминга ниже, чем заданный порог, хотят обнаружить друг друга, eNB может выбирать альтернативный способ определения местоположения. Если, например, опережение тайминга ниже, чем первый порог, то сеть может непосредственно допустить, что они находятся в RF близости, и может предоставить эту информацию к WTRU. Если, например, опережение тайминга ниже, чем второй порог, то сеть может использовать альтернативные процедуры определения местоположения, которые могут быть достаточно точными, поскольку WTRU может быть физически близок к передатчику сигналов.
[0469] Хотя признаки и элементы описаны выше в конкретных комбинациях, специалисту в данной области техники должно быть понятно, что каждый признак или элемент может быть использован отдельно или в любой комбинации с другими признаками или элементами. В дополнение, описанные здесь способы могут быть реализованы в компьютерной программе, программном обеспечении или программном обеспечении, встроенном в считываемый компьютером носитель, для выполнения компьютером или процессором. Примеры считываемых компьютером носителей включают в себя электронные сигналы (передаваемые по проводным или беспроводным соединениям) и считываемые компьютером носители хранения данных. Примеры считываемых компьютером носителей хранения данных включают в себя, без ограничения указанным, постоянную память (ROM), оперативную память (RAM), регистр, кэш-память, полупроводниковые устройства памяти, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители, оптические носители, такие как диски CD-ROM и цифровые многофункциональные диски (DVD). Процессор в сочетании с программным обеспечением может использоваться для реализации радиочастотного приемопередатчика для использования в WTRU, в WTRU терминале, базовой станции, RNC или любом хост-компьютере.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫБОР РЕСУРСА ДЛЯ ОБНАРУЖЕНИЯ И СВЯЗИ ОТ УСТРОЙСТВА К УСТРОЙСТВУ | 2015 |
|
RU2643349C1 |
| МНОГОТОЧЕЧНАЯ ПЕРЕДАЧА ПРИ БЕСПРОВОДНОЙ СВЯЗИ | 2012 |
|
RU2654052C2 |
| ПЕРЕДАЧА УПРАВЛЯЮЩИХ ДАННЫХ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ | 2010 |
|
RU2557164C2 |
| АКТИВАЦИЯ/ДЕАКТИВАЦИЯ КОМПОНЕНТНЫХ НЕСУЩИХ В СИСТЕМАХ С НЕСКОЛЬКИМИ НЕСУЩИМИ | 2010 |
|
RU2558733C2 |
| СПОСОБ ДЛЯ ПРЕДОСТАВЛЕНИЯ УСОВЕРШЕНСТВОВАННОГО ФИЗИЧЕСКОГО КАНАЛА УПРАВЛЕНИЯ НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ И БЕСПРОВОДНОЙ ПРИЕМО-ПЕРЕДАЮЩИЙ МОДУЛЬ | 2013 |
|
RU2628011C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ РАСШИРЕННОГО КАНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2589892C2 |
| УСТОЙЧИВОСТЬ ПОДКЛЮЧЕНИЯ В БЕСПРОВОДНЫХ СИСТЕМАХ | 2014 |
|
RU2646846C2 |
| СПОСОБ, СИСТЕМА И УСТРОЙСТВО ДЛЯ ПРИЕМА СОВМЕСТНО ИСПОЛЬЗУЕМОГО КАНАЛА НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ В КООПЕРАТИВНЫХ МНОГОТОЧЕЧНЫХ ПЕРЕДАЧАХ | 2012 |
|
RU2613178C2 |
| ПРИНУДИТЕЛЬНОЕ ВЫСВОБОЖДЕНИЕ И УПРАВЛЕНИЕ ДОСТУПОМ ПО ТИПУ УСТРОЙСТВО-УСТРОЙСТВО (D2D) | 2015 |
|
RU2700181C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2014 |
|
RU2642354C2 |
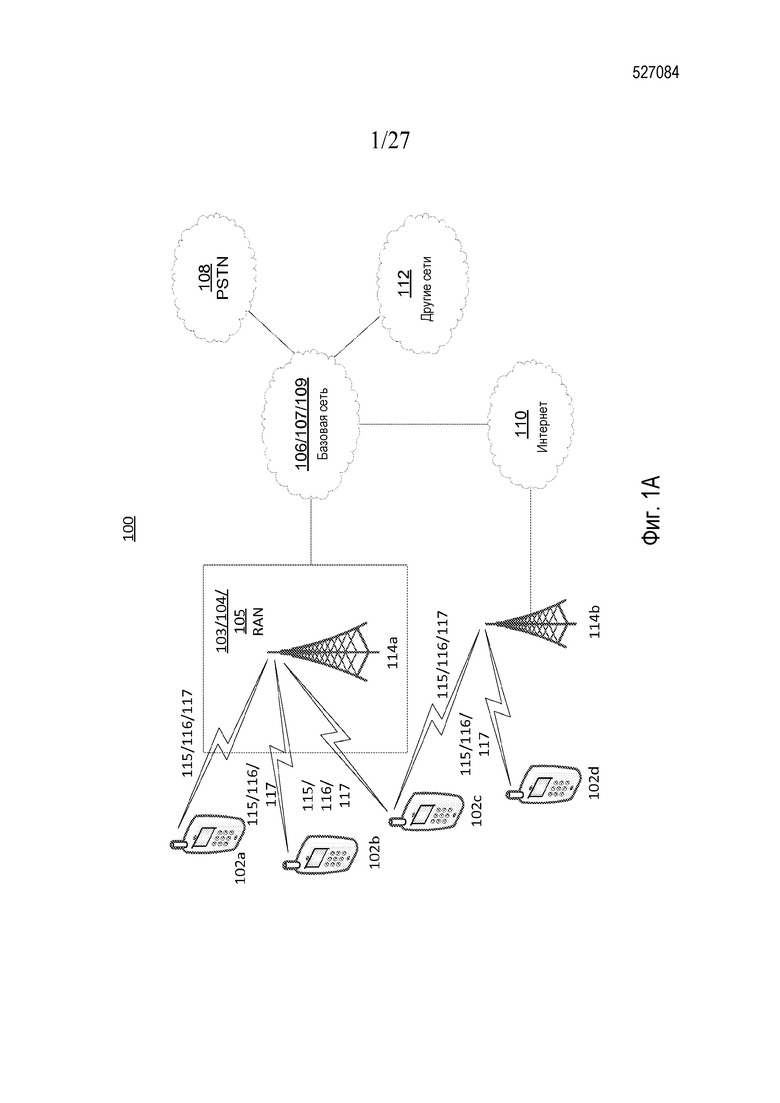
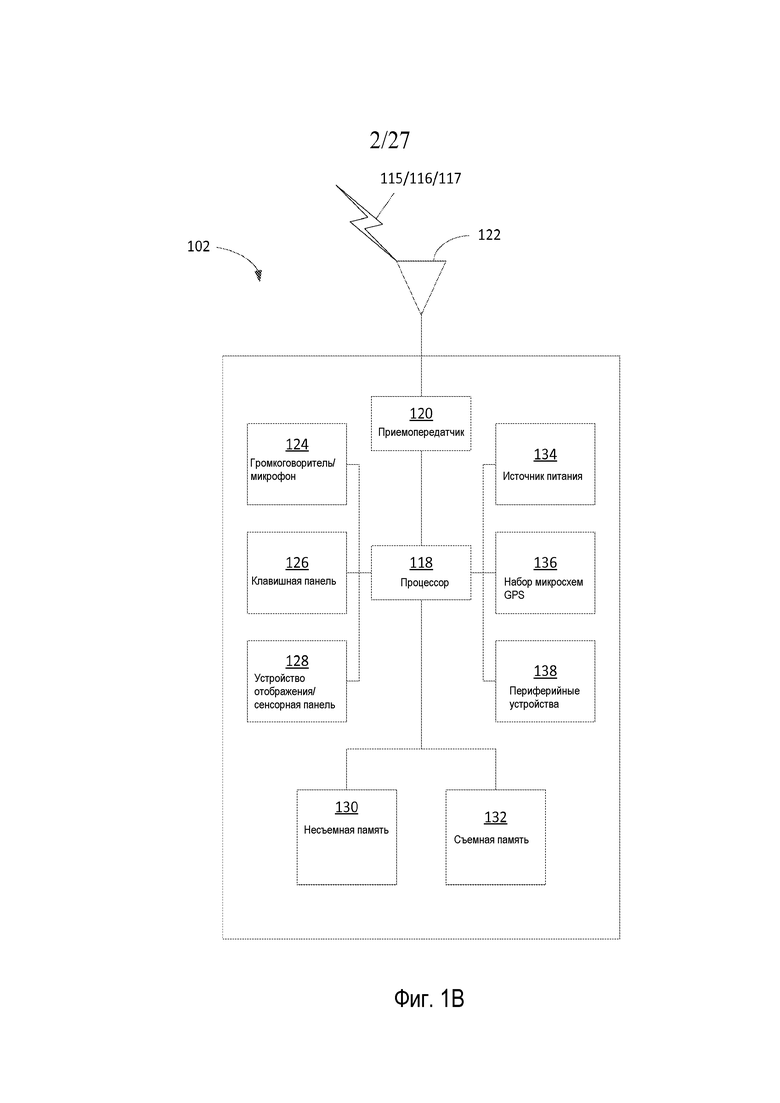
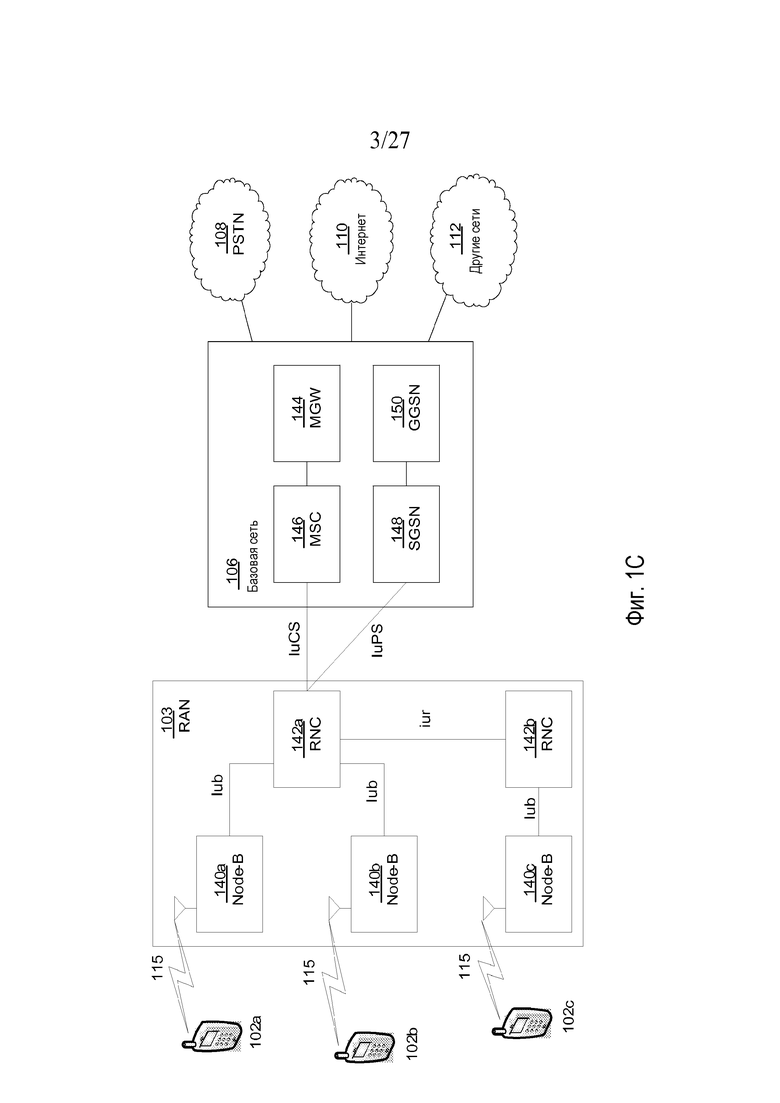
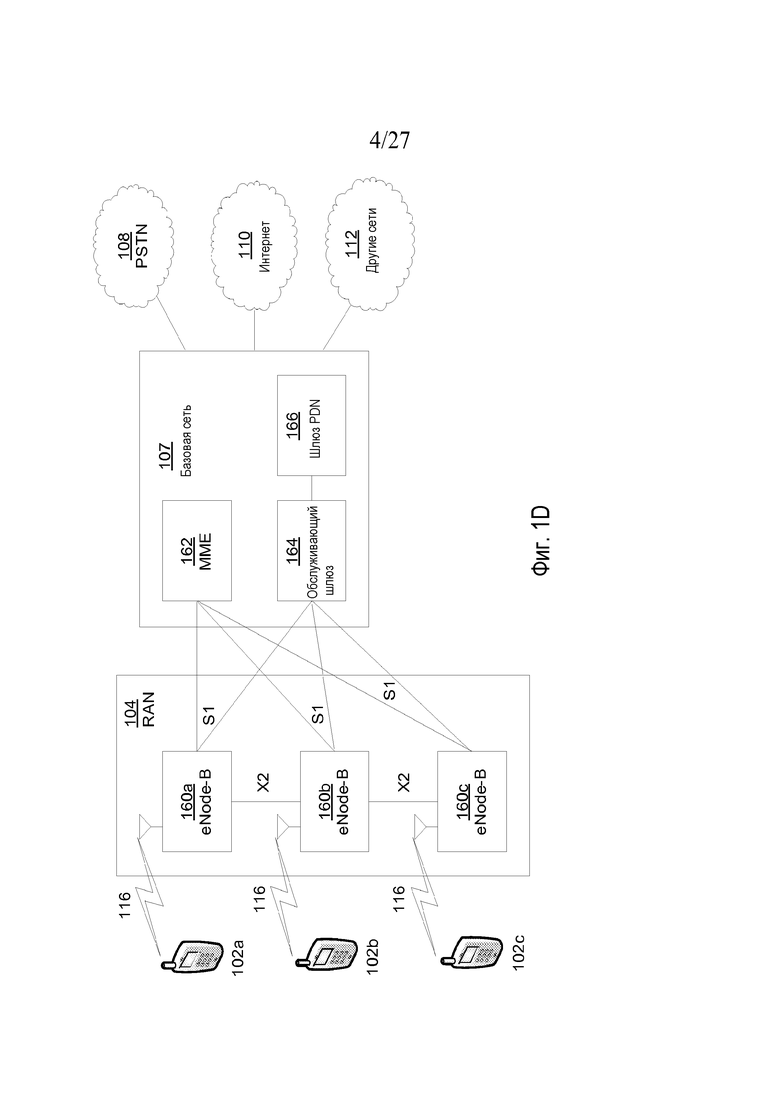
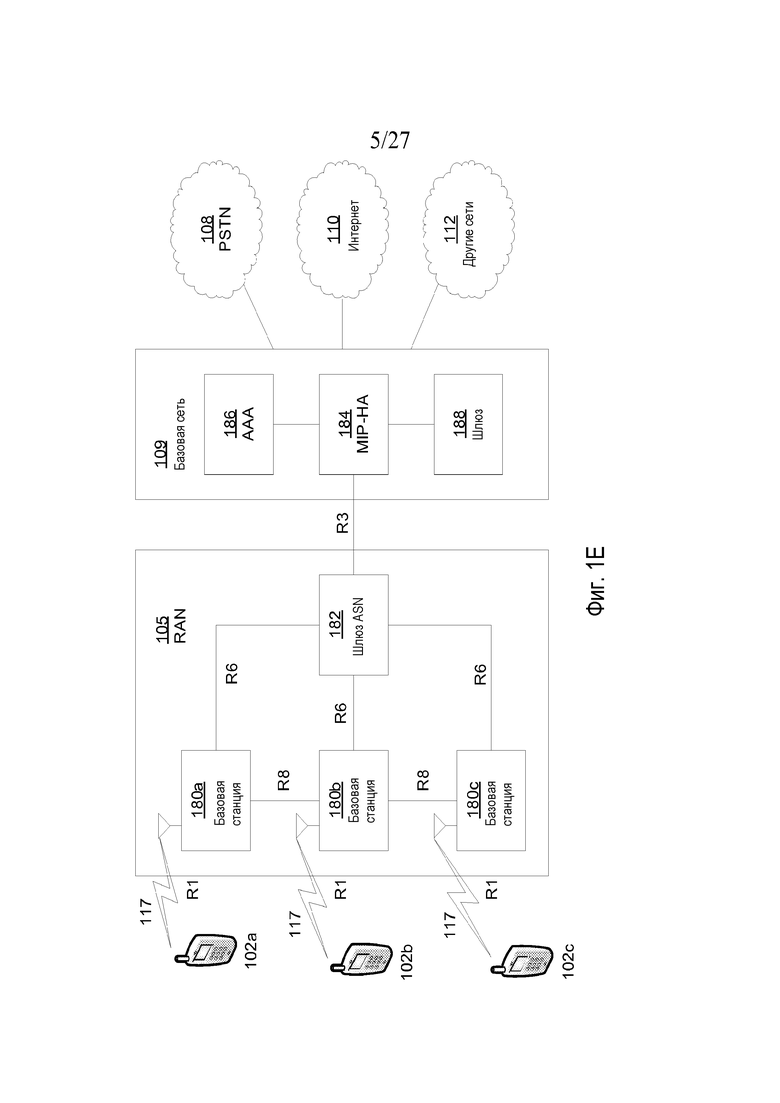
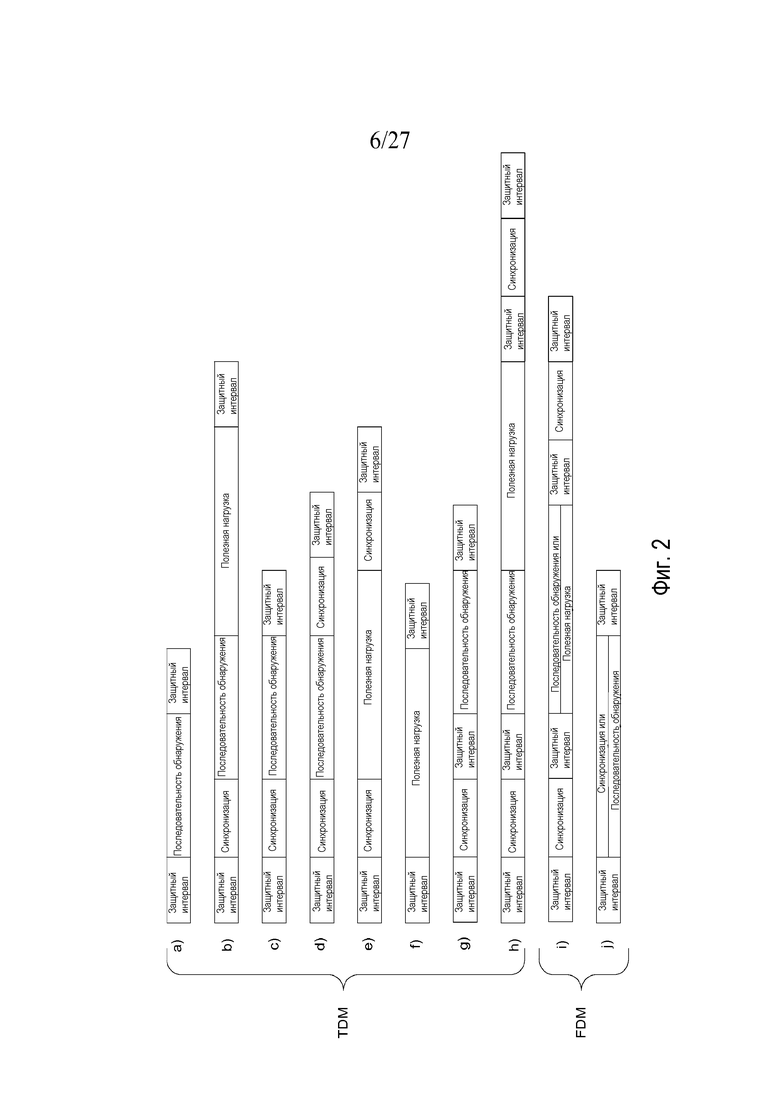
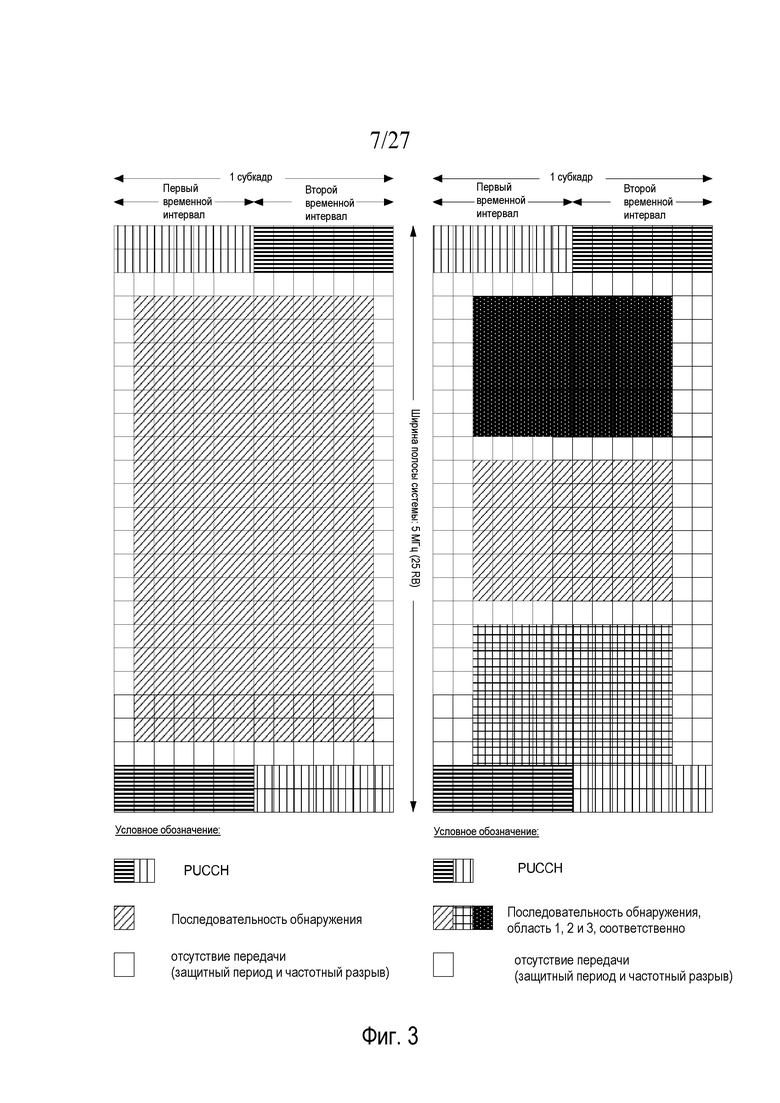
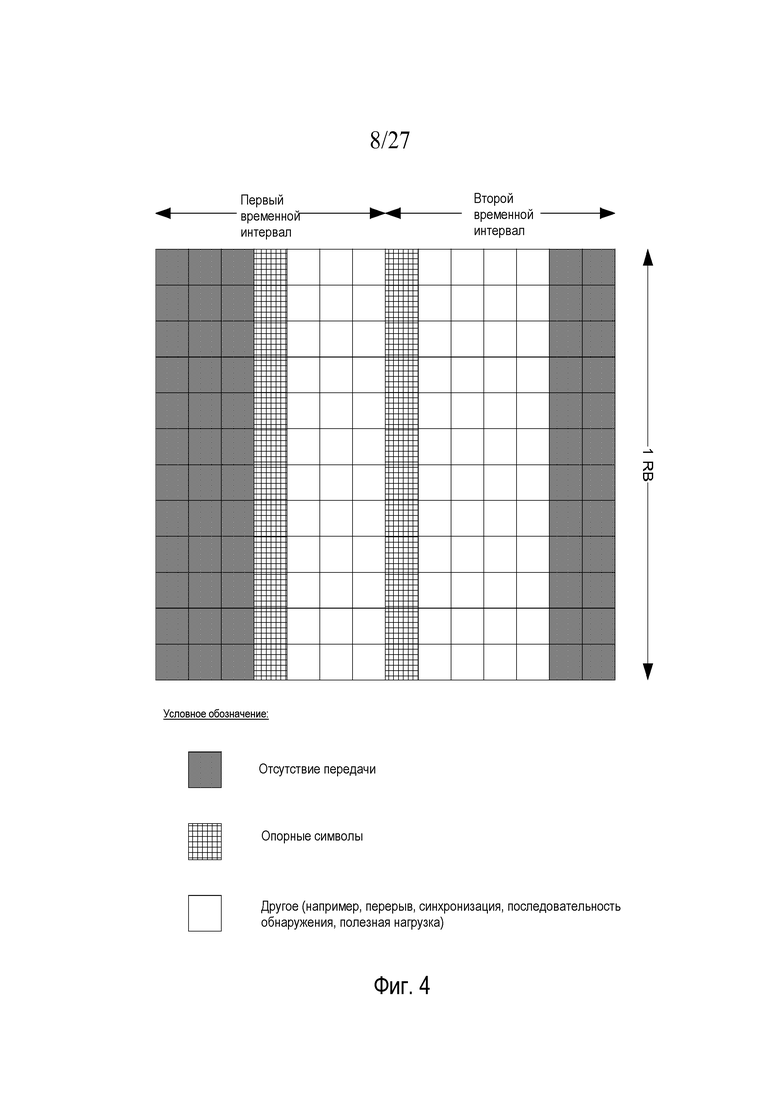
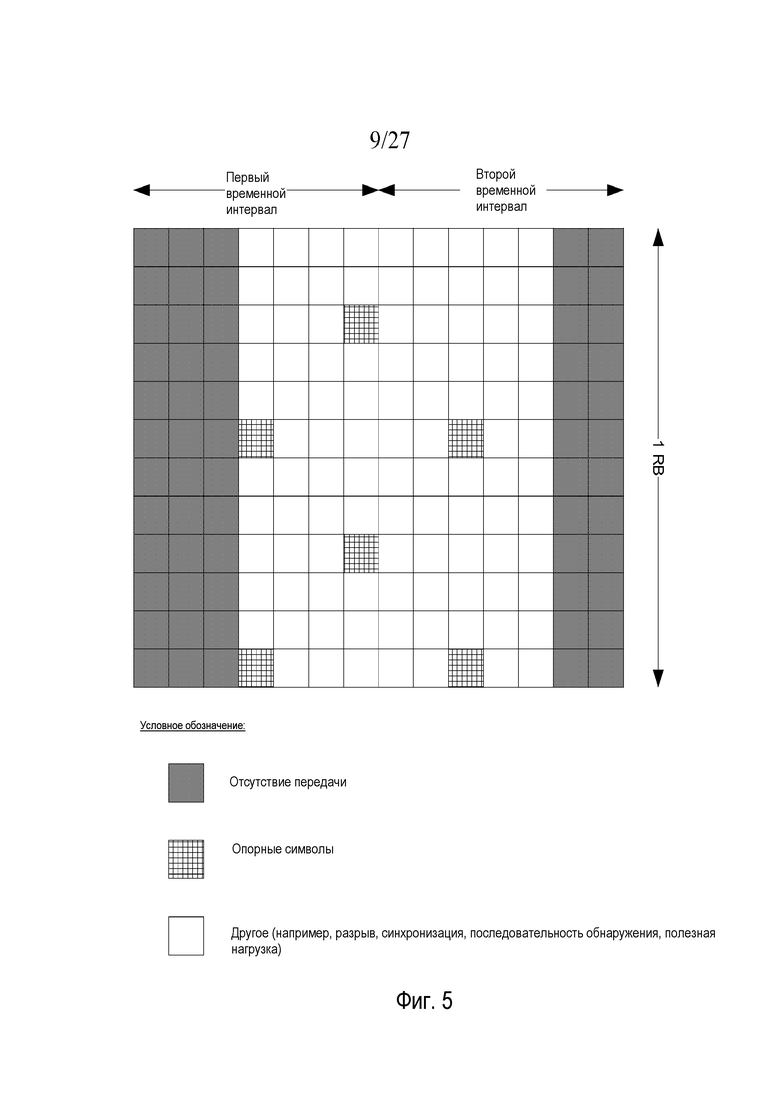
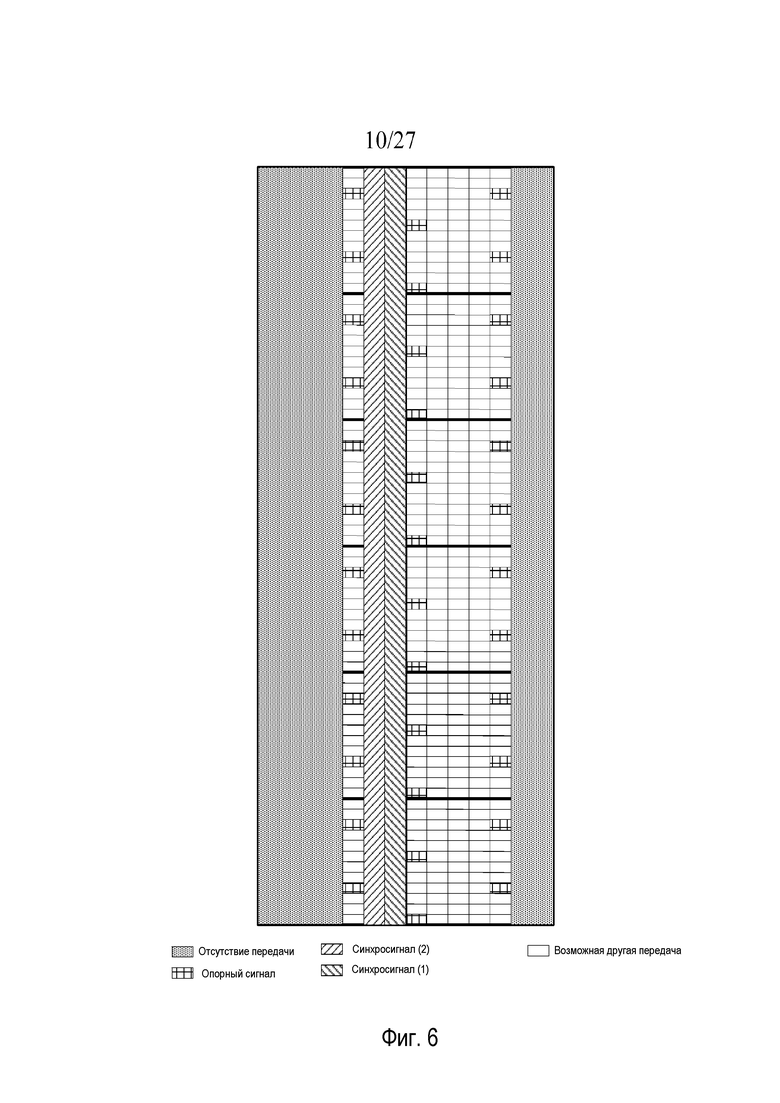
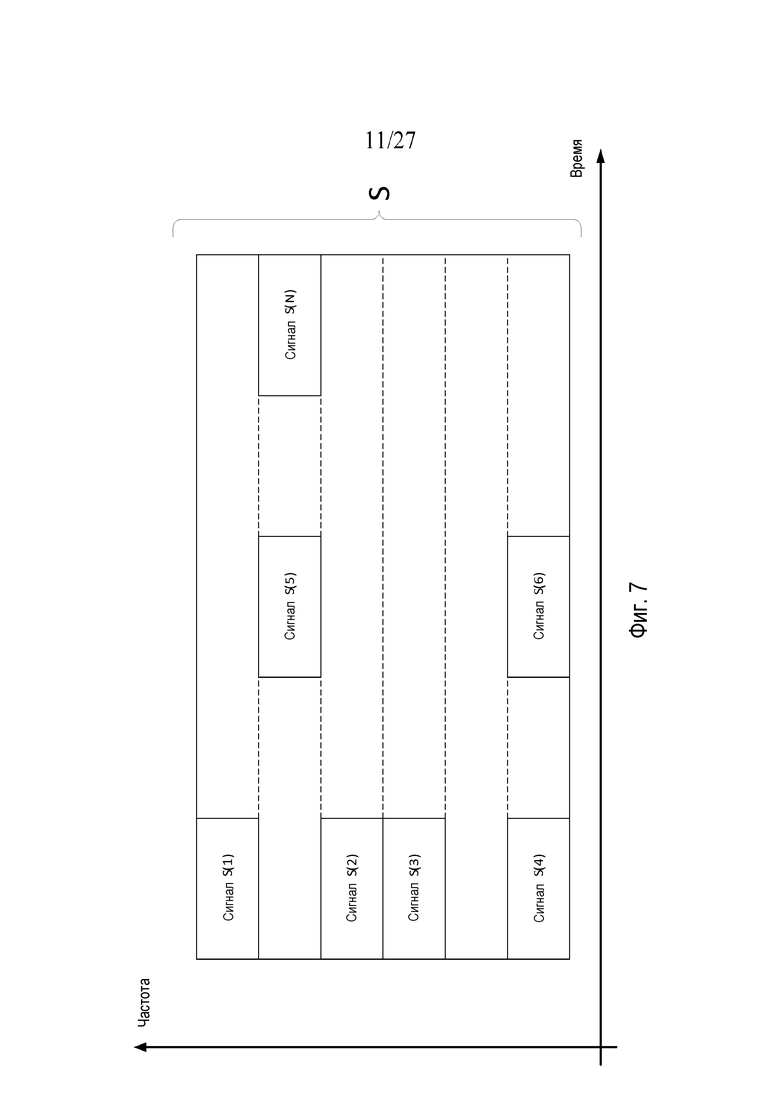
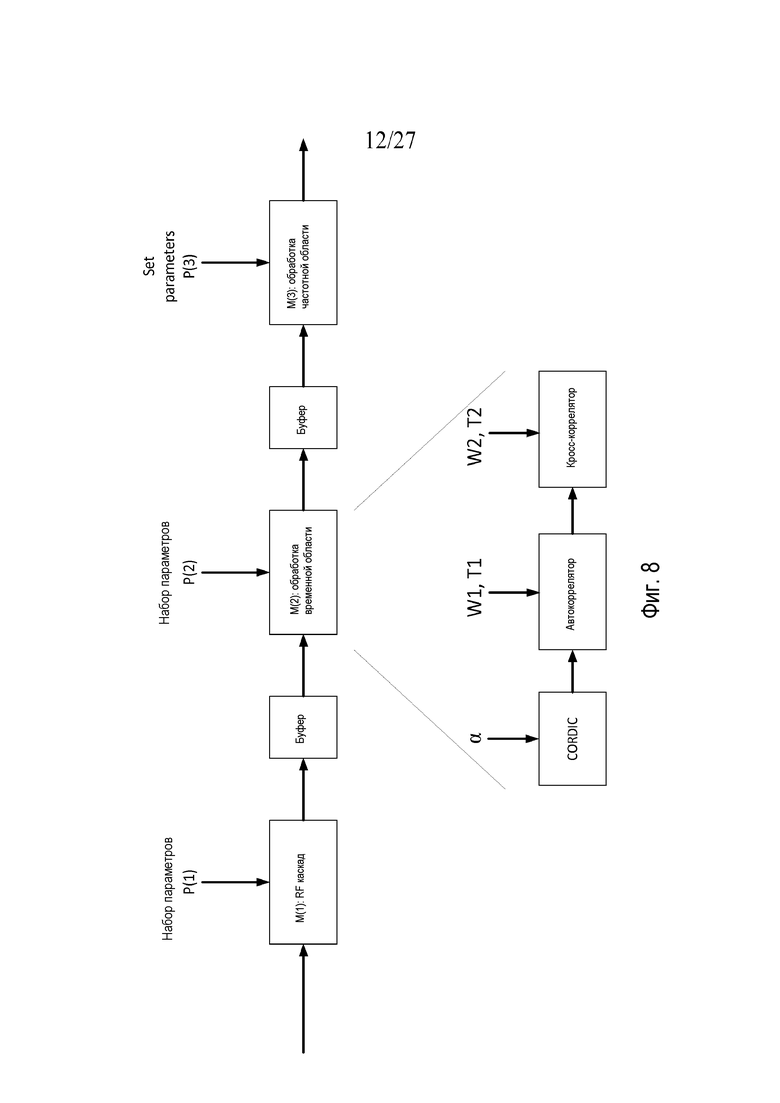
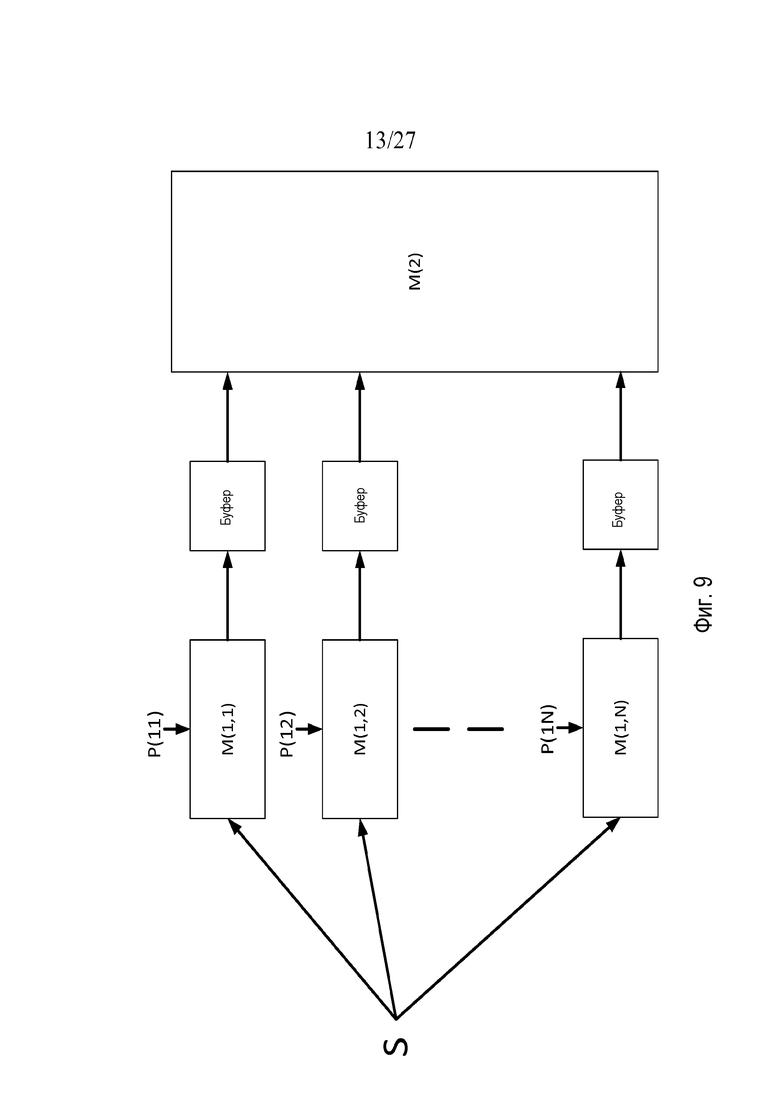
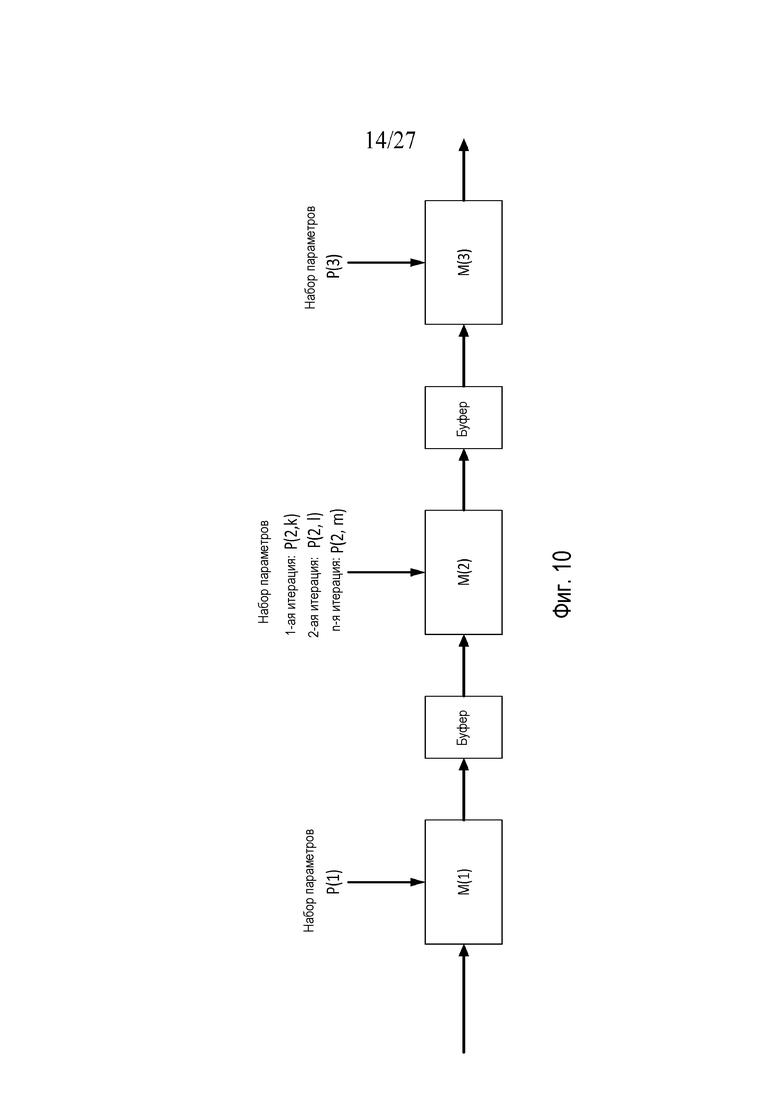
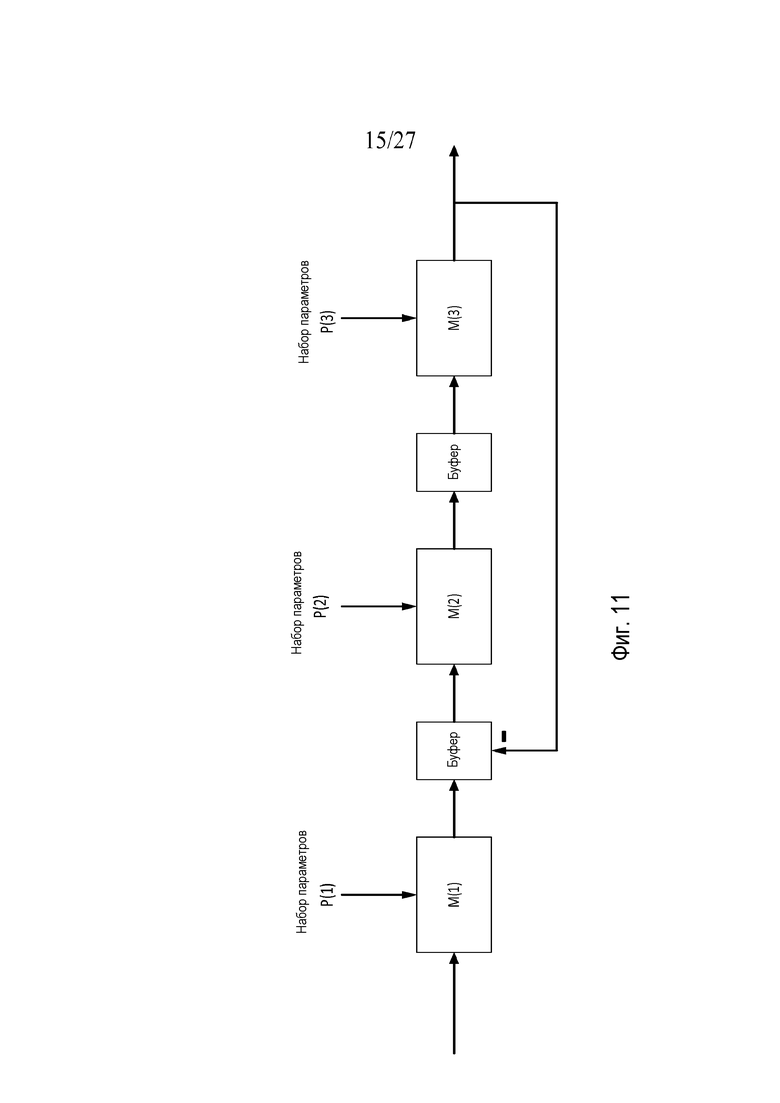
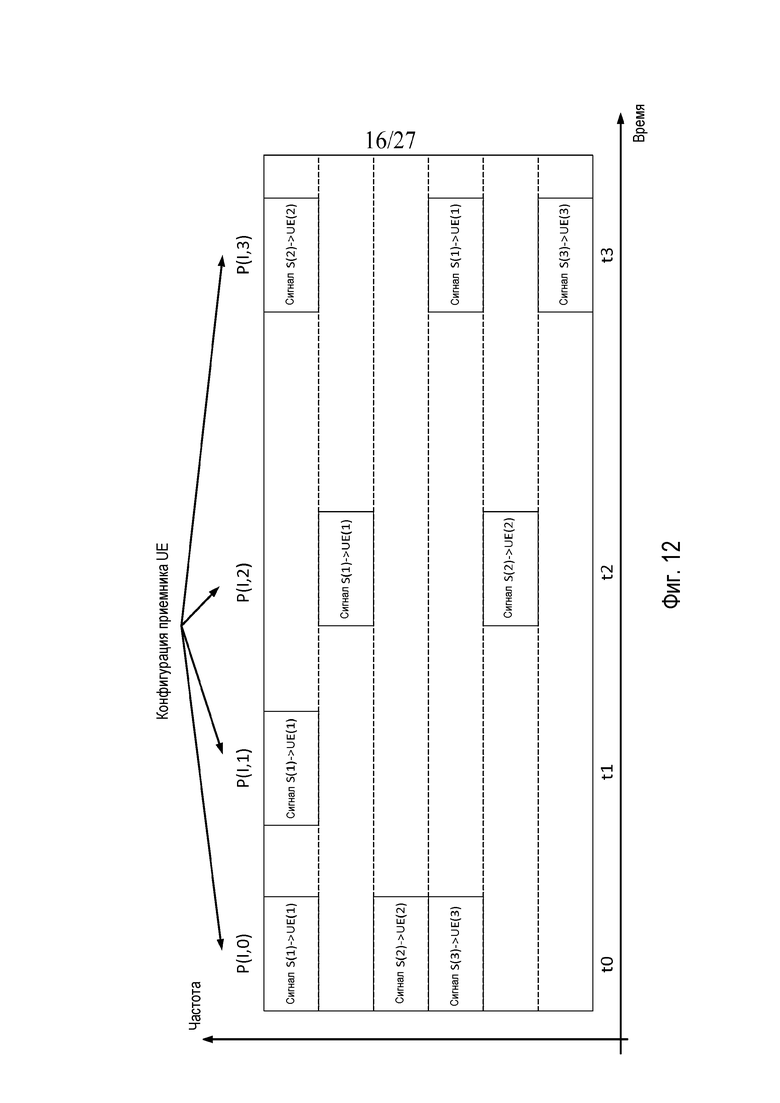
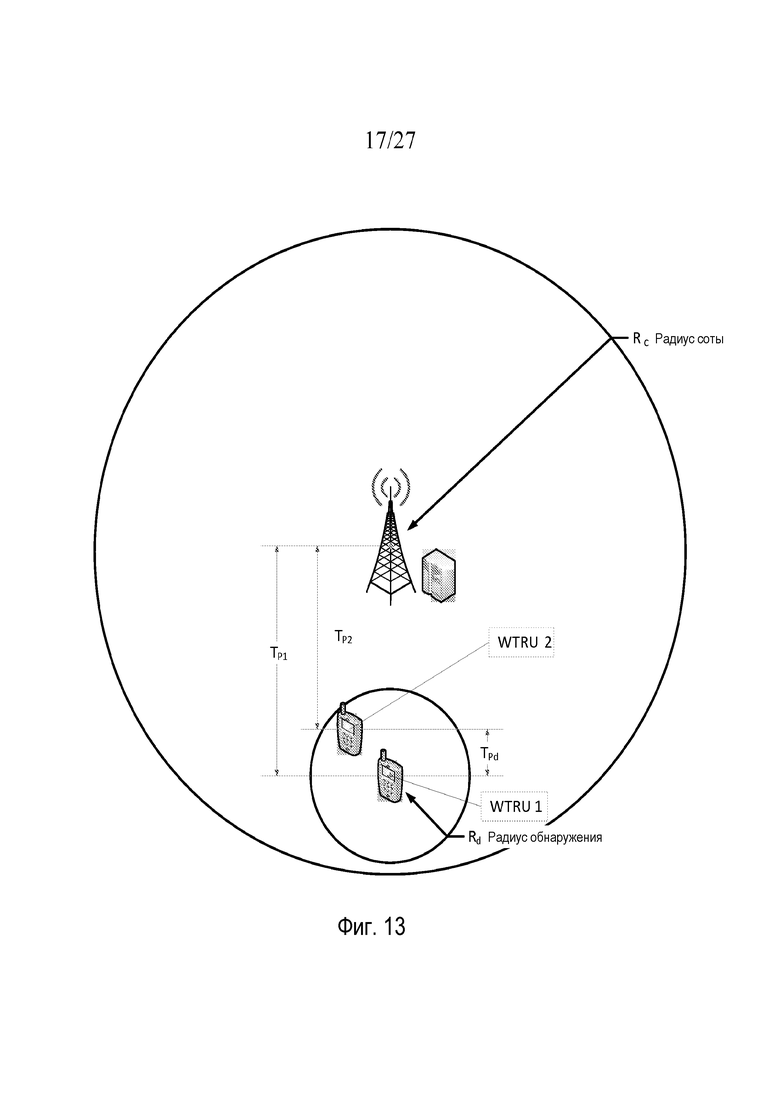
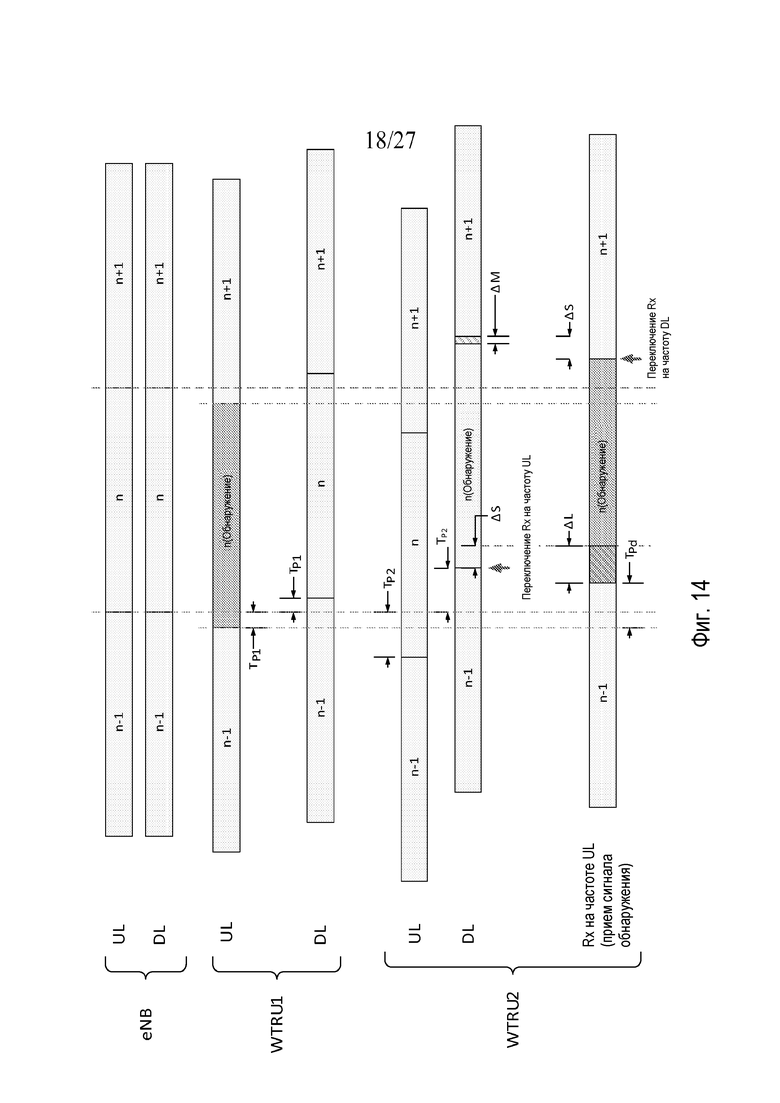
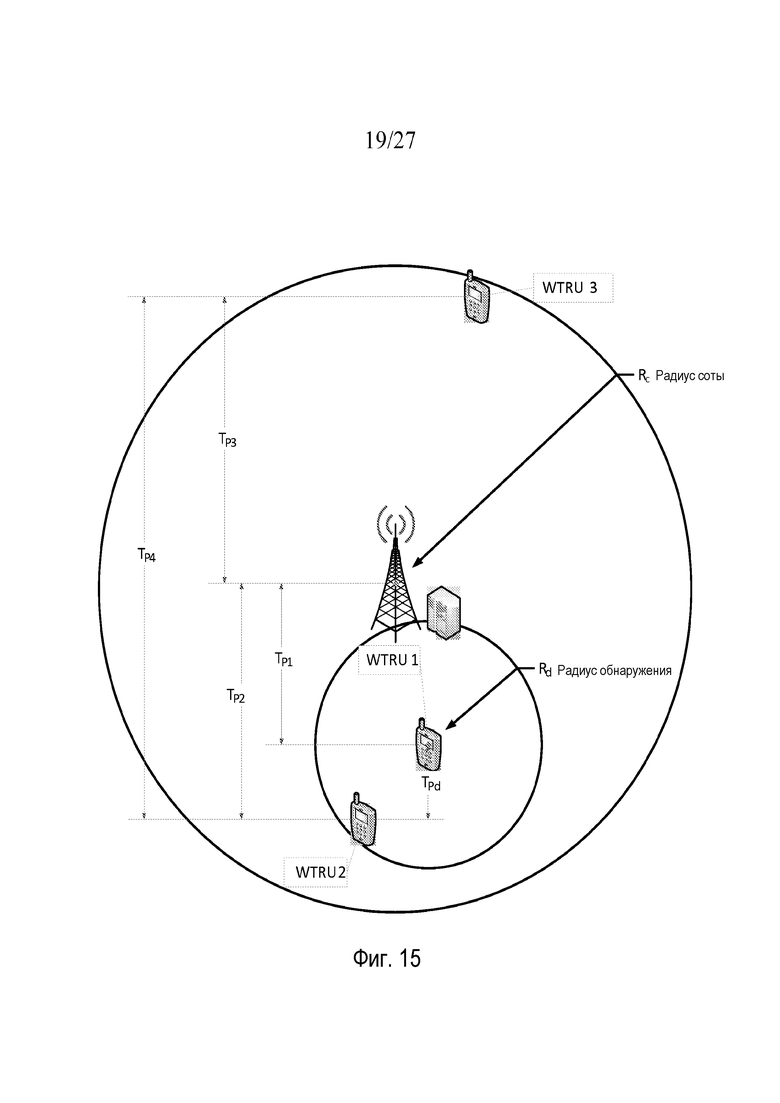
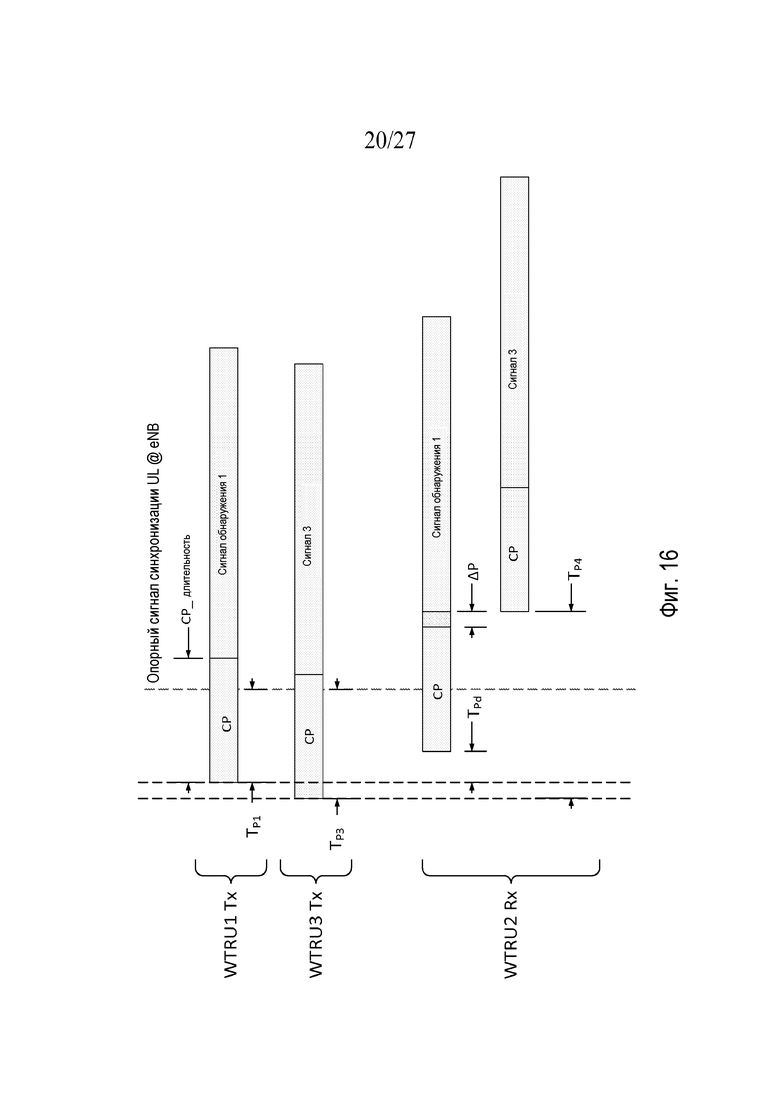
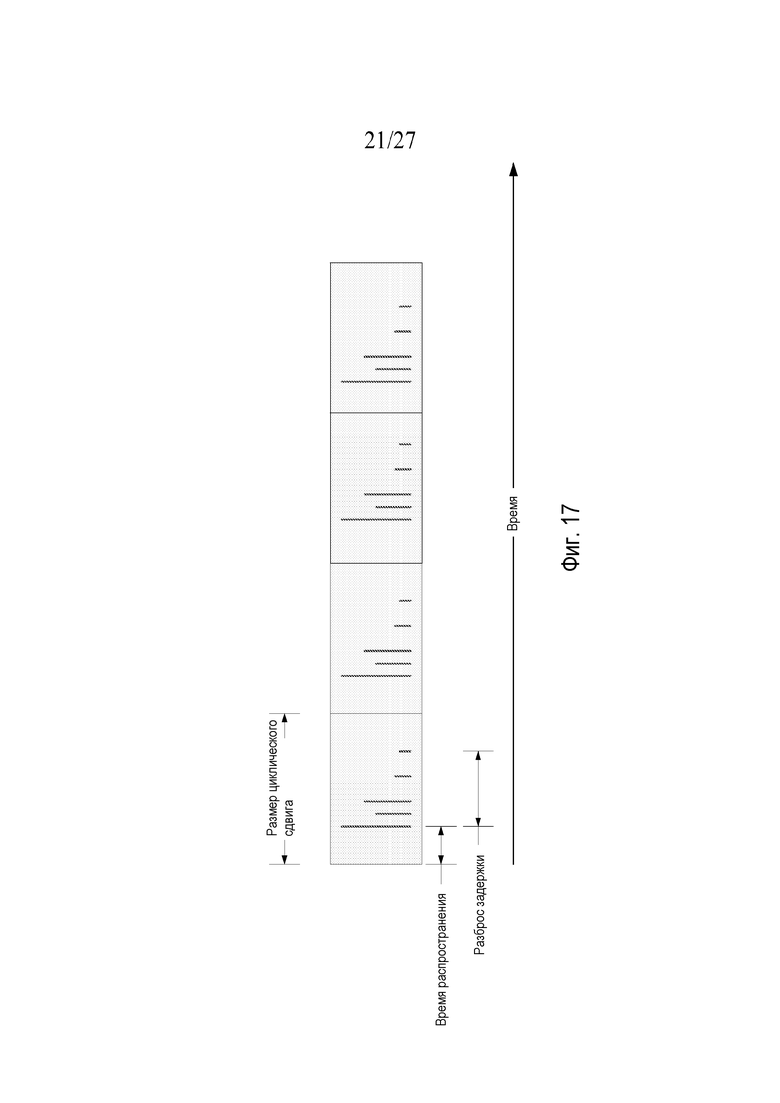
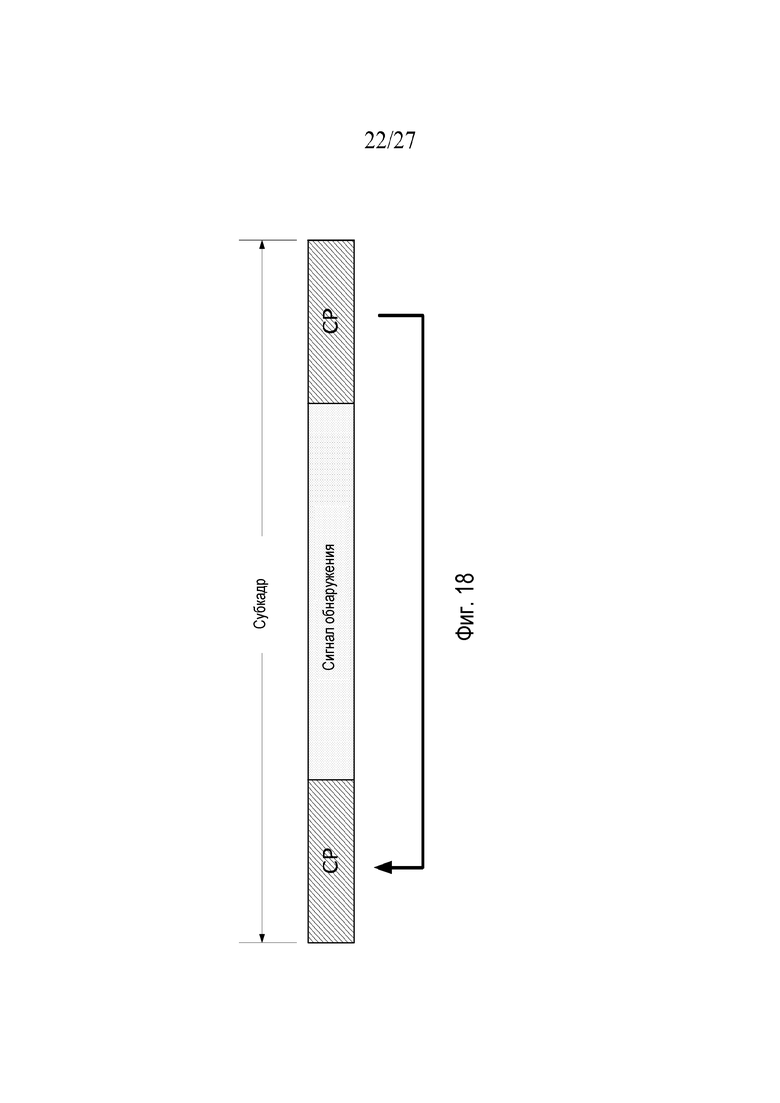
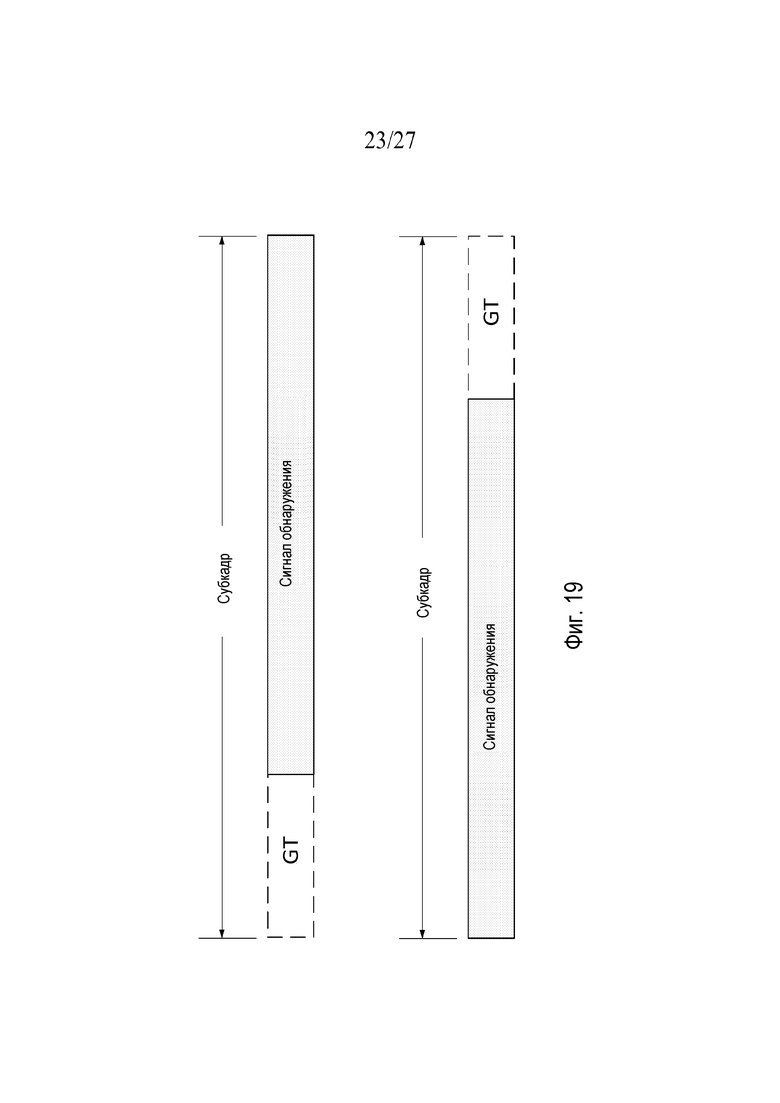
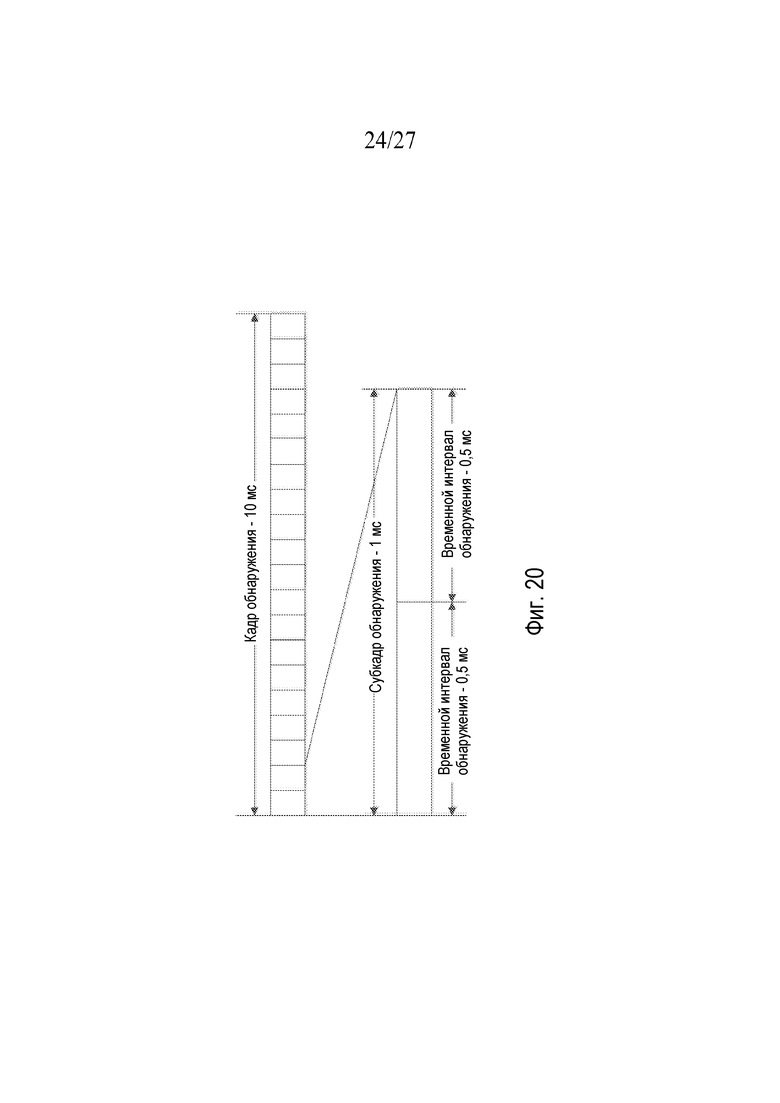
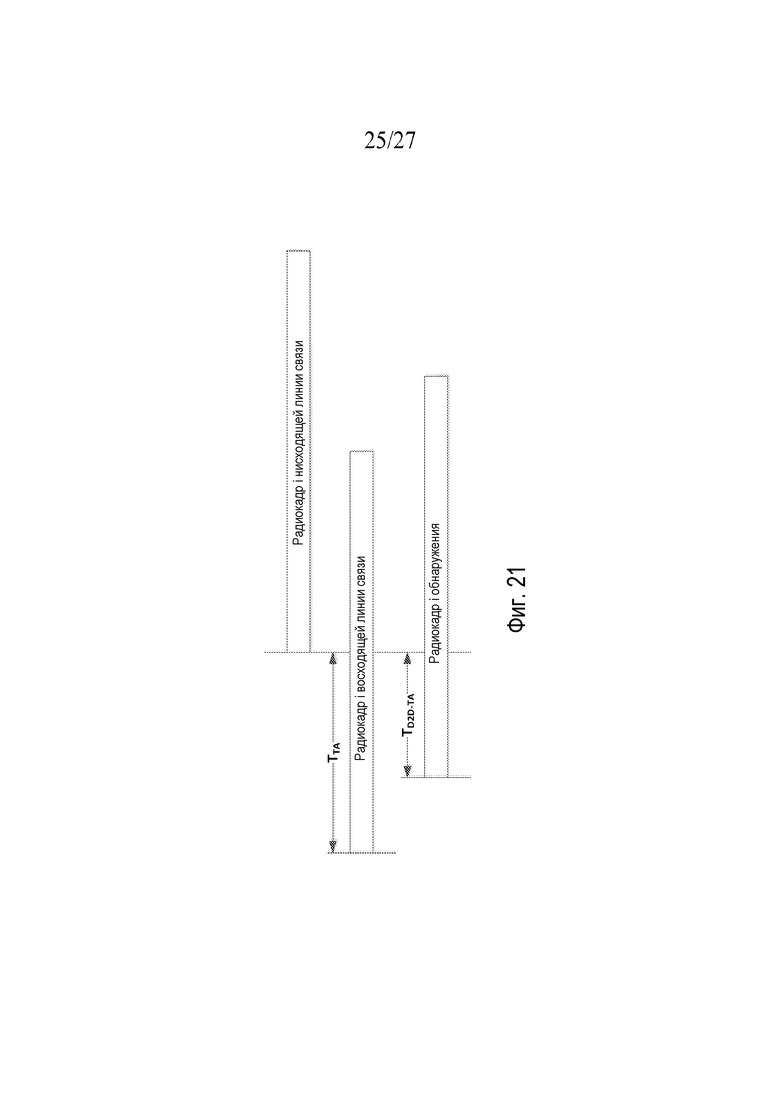
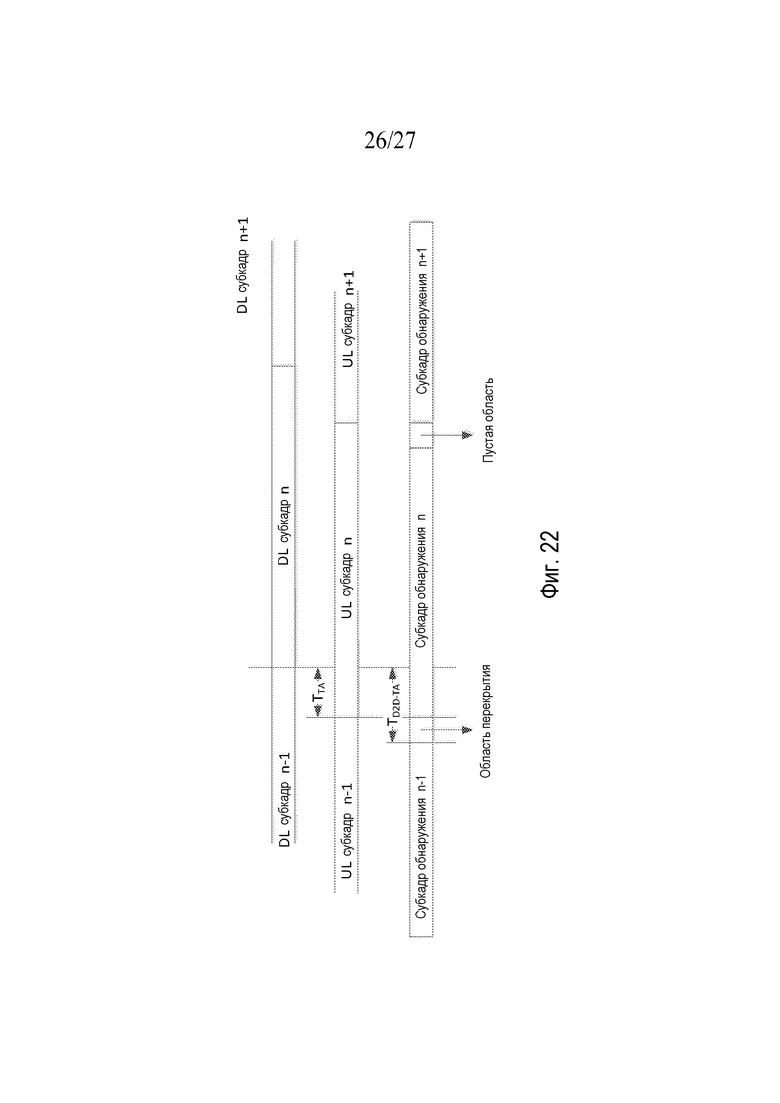
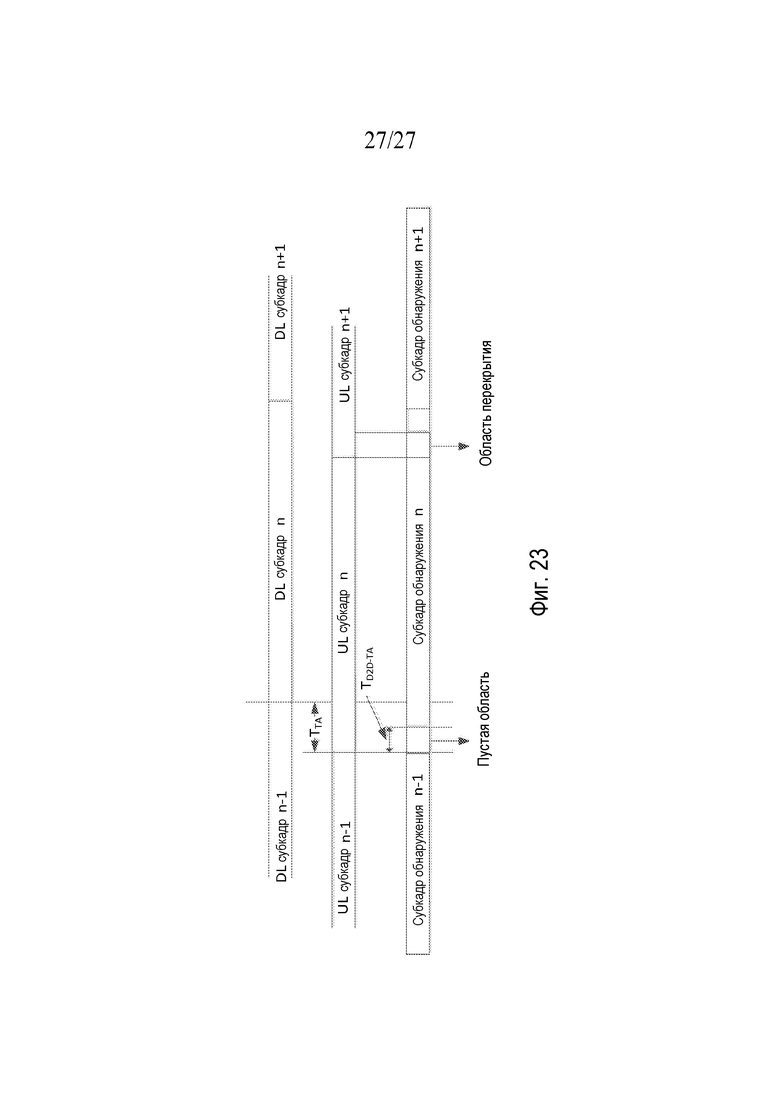
Изобретение относится к области беспроводных технологий. Технический результат изобретения заключается в обеспечении сетевого управления связью D2D. Обнаружение и измерение сигнала обнаружения D2D, управление идентификационной информацией сигнала D2D и отслеживание посредством беспроводного приемопередающего блока (WTRU) PDCCH для планирования обнаружения D2D может выполняться посредством WTRU, который может быть сконфигурирован со специфической для D2D конфигурацией возможностей передачи/приема. Сигнал обнаружения может нести полезную нагрузку для явно определенной информации об идентификационной информации пользователя и/или службы и может отображаться на физические ресурсы так, чтобы отделить передачу/прием сигнала обнаружения от операций нисходящей линии связи. WTRU может измерять качество сигнала обнаружения D2D и передавать отчет в сеть. 2 н. и 18 з.п. ф-лы, 7 табл., 27 ил.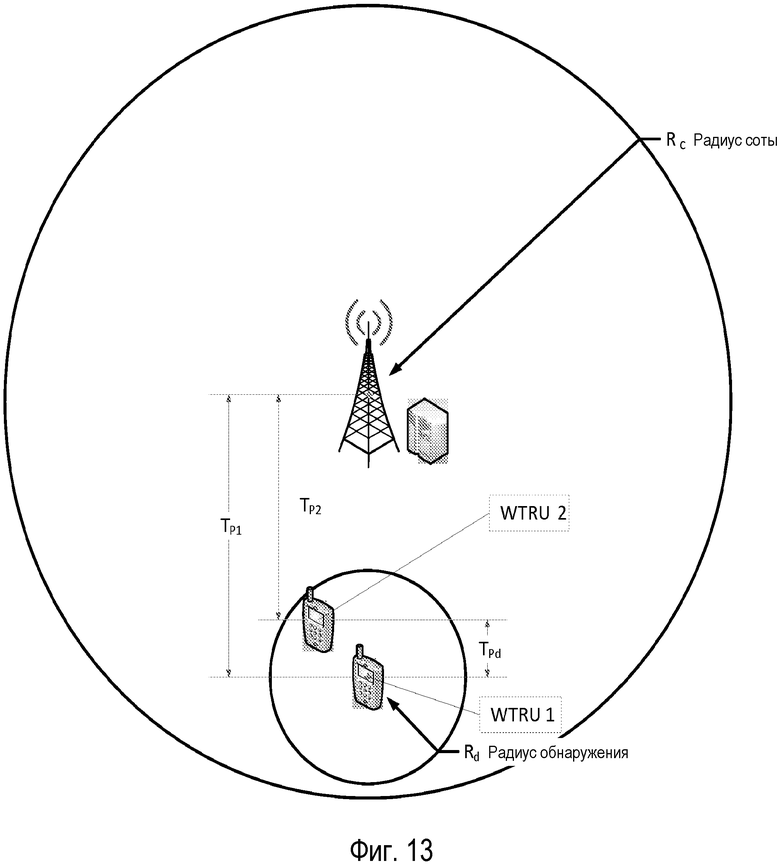
1. Способ, ассоциированный с передачей сигналов от устройства к устройству (D2D) посредством беспроводного приемопередающего устройства (WTRU), содержащий:
определение плана сигнала обнаружения D2D, указывающего разрешенные субкадры для передачи сигнала обнаружения D2D;
определение последовательности скремблирования, при этом последовательность скремблирования сгенерирована генератором последовательностей скремблирования, и при этом генератор последовательностей скремблирования инициализирован с помощью предварительно сконфигурированного фиксированного значения;
определение, передавать ли сигнал обнаружения D2D в одном или нескольких разрешенных субкадрах; и
передачу сигнала обнаружения D2D с использованием последовательности скремблирования, при этом сигнал обнаружения D2D содержит полезные данные и защитный период.
2. Способ по п. 1, в котором определение плана сигнала обнаружения D2D содержит прием блока системной информации (SIB) из сети и определение плана сигнала обнаружения D2D, основываясь на SIB.
3. Способ по п. 1, в котором определение плана сигнала обнаружения D2D содержит выведение плана сигнала обнаружения D2D, основываясь на временном идентификаторе радиосети D2D (D-RNTI), ассоциированном с WTRU.
4. Способ по п. 1, в котором определение, передавать ли сигнал обнаружения D2D, содержит:
определение плана передачи, ассоциированного с приоритетным каналом;
сравнение плана сигнала обнаружения D2D с планом передачи, ассоциированным с приоритетным каналом; и
определение того, что план сигнала обнаружения D2D не вступает в конфликт с планом передачи, ассоциированным с приоритетным каналом.
5. Способ по п. 4, в котором приоритетным каналом является физический совместно используемый канал восходящей линии связи (PUSCH) или физический канал управления восходящей линии связи (PUCCH) с трафиком ACK/NACK.
6. Способ по п. 1, дополнительно содержащий:
сравнение плана сигнала обнаружения D2D с планом передачи, ассоциированным с приоритетным каналом;
определение того, что план сигнала обнаружения D2D вступает в конфликт с планом передачи, ассоциированным с приоритетным каналом;
назначение передаче, ассоциированной с приоритетным каналом, более высокого приоритета, чем передаче сигнала обнаружения D2D; и
отправку передачи, ассоциированной с приоритетным каналом.
7. Способ по п. 1, в котором сигнал обнаружения D2D дополнительно содержит опорный символ.
8. Способ по п. 7, в котором опорный символ находится в полезных данных.
9. Способ по п. 1, в котором WTRU сконфигурировано с возможностью чередовать области D2D при передаче сигнала обнаружения D2D.
10. Способ по п. 1, в котором WTRU сконфигурировано с возможностью чередовать области D2D при передаче сигнала обнаружения D2D с использованием заданной последовательности скачкообразного изменения или на основании случайного выбора.
11. Беспроводное приемопередающее устройство (WTRU), содержащее:
процессор, сконфигурированный с возможностью по меньшей мере:
определения плана сигнала обнаружения от устройства к устройству (D2D), указывающего разрешенные субкадры для передачи сигнала обнаружения D2D;
определения последовательности скремблирования, при этом последовательность скремблирования сгенерирована генератором последовательностей скремблирования, и при этом генератор последовательностей скремблирования инициализирован с помощью предварительно сконфигурированного фиксированного значения;
определения, передавать ли сигнал обнаружения D2D в одном или нескольких разрешенных субкадрах; и
передатчик, сконфигурированный с возможностью по меньшей мере:
передачи сигнала обнаружения D2D с использованием последовательности скремблирования, при этом сигнал обнаружения D2D содержит полезные данные и защитный период.
12. WTRU по п. 11, в котором план сигнала обнаружения D2D определяется посредством приема блока системной информации (SIB) из сети и определения плана сигнала обнаружения D2D, основываясь на этом SIB.
13. WTRU по п. 11, в котором план сигнала обнаружения D2D определяется посредством выведения плана сигнала обнаружения D2D, основываясь на временном идентификаторе радиосети D2D (D-RNTI), ассоциированном с WTRU.
14. WTRU по п. 11, в котором для передачи сигнала обнаружения D2D процессор сконфигурирован с возможностью по меньшей мере:
определения плана передачи, ассоциированного с приоритетным каналом;
сравнения плана сигнала обнаружения D2D с планом передачи, ассоциированным с приоритетным каналом; и
определения того, что план сигнала обнаружения D2D не вступает в конфликт с планом передачи, ассоциированным с приоритетным каналом.
15. WTRU по п. 14, в котором приоритетным каналом является физический совместно используемый канал восходящей линии связи (PUSCH) или физический канал управления восходящей линии связи (PUCCH) с трафиком ACK/NACK.
16. WTRU по п. 11, в котором процессор сконфигурирован с возможностью:
сравнения плана сигнала обнаружения D2D с планом передачи, ассоциированным с приоритетным каналом;
определения того, что план сигнала обнаружения D2D не вступает в конфликт с планом передачи, ассоциированным с приоритетным каналом;
назначения передаче, ассоциированной с приоритетным каналом, более высокого приоритета, чем передаче сигнала обнаружения D2D; и
отправки передачи, ассоциированной с приоритетным каналом.
17. WTRU по п. 11, в котором сигнал обнаружения D2D дополнительно содержит опорный символ.
18. WTRU по п. 17, в котором опорный символ находится в полезных данных.
19. WTRU по п. 11, в котором процессор сконфигурирован с возможностью чередовать области D2D при передаче сигнала обнаружения D2D.
20. WTRU по п. 11, в котором процессор сконфигурирован с возможностью чередовать области D2D при передаче сигнала обнаружения D2D с использованием заданной последовательности скачкообразного изменения или на основании случайного выбора.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

