Изобретение относится к области спорта, а именно к спортивной гребле на морских ялах, и может быть использовано для обучения и тренировки спортсменов-гребцов слаженной, синхронной работе в составе экипажа морского яла на суше, в условиях, максимально приближенных к тренировочному процессу, проводимому на воде.
Заявленное техническое решение расширяет арсенал средств данного назначения.
Известен тренажер для тренировки спортсменов-гребцов, выступающих в академической гребле, реализованный в «Устройстве для тренировки гребцов» по патенту РФ №2153909 С1, МПК А63В 69/06, опубл. 10.08.2000 г.
Устройство состоит из рамы, смонтированной на колесах, на которой закреплен спинной упор, на раму подвижно устанавливаются сиденье для спортсмена, каретка с закрепленными на ней упорами для ног, а также подвижная каретка с упорами для рук. Таким образом, каретка с ножными упорами, а также каретка с ручными упорами могут перемещаться вдоль рамы тренажера.
Недостатком известного тренажера является невозможность измерения биомеханических параметров спортсменов во время тренировки, а также своевременного изменения дополнительной внешней нагрузки, что не позволяет осуществить полную имитацию процесса гребли и, следовательно, достигнуть нужной эффективности тренировки.
Известен так же тренажер для тренировки гребцов, описанный в патенте РФ №2512792 МПК А63В 69/06, опубл. 10.04.2014 г.
Тренажер состоит из рамы, на которую установлена каретка с подвижным сиденьем для спортсмена, упорами для ног, рукояток условных весел, нагрузочного модуля, включающего аэродинамическую турбину, а также содержащий датчики усилий и перемещений. Нагрузочный модуль тренажера дополнительно содержит электромагнитное тормозное устройство, при этом датчики устанавливают на каретке с ножными упорами, на рукоятках условных весел, подвижном сиденье и нагрузочном устройстве, и подключают к компьютеру, который считывает поступающую на них информацию и, в зависимости от правильности техники выполнения гребка, формирует управляющий сигнал, поступающий на электромагнитное тормозное устройство, создавая дополнительное торможение аэродинамической турбины.
Недостатком данного тренажера является отсутствие возможности тренировки слаженной синхронной работы гребцов в составе экипажа, а также коррекции внешних силовых добавок адекватно идеальной модели командной техники гребли.
Наиболее близким по своей технической сущности к заявленному является способ тренировки гребцов и тренажер-эргометр для академической гребли, описанный в патенте РФ №2162003 МПК А63В 69/06, опубл. 20.01.2001 г.
Способ-прототип заключается в том, что с помощью программно-управляющего устройства создают дополнительные внешние нагрузки, имитирующие сопротивление водной среды. Исходные параметры внешних силовых добавок по силе, частоте, амплитуде и их изменениям во времени определяют по заранее рассчитанному алгоритму движений тренирующегося для рекордных показателей на реальной дистанции. При проведении тренировки учитывают раздельно энергию, затрачиваемую тренирующимся и производимую внешними силовыми добавками. Параметры внешних силовых добавок корректируют адекватно физическому состоянию тренирующегося.
Недостатком указанного способа-прототипа является отсутствие возможности своевременной коррекции биомеханических параметров командной техники гребли.
Кроме этого, способ-прототип имеет узкую область применения, так как предназначен только для одиночной тренировки гребцов в академической гребле.
Техническим результатом заявленного способа является повышение слаженности и синхронности действий всех членов экипажа морского яла, путем своевременной коррекции биомеханических параметров командной техники гребли.
Достижение технического результата обеспечивается тем, что в известном способе тренировки гребцов и тренажер-эргометре для академической гребли, заключающемся в том, что с помощью программно-управляющего устройства создают дополнительные внешние нагрузки, имитирующие сопротивление водной среды. Предварительно, объединяют гребные тренажеры в локальную вычислительную сеть и подключают к компьютеру, устанавливают датчики на рукоятках условных весел, подвижном сиденье, раме тренажера, ножных упорах, нагрузочном устройстве, корпусе и голенях спортсменов. После чего, измеряют и запоминают индивидуальные биомеханические параметры гребной локомоции каждого спортсмена, вычисляют по полученным значениям обобщенные групповые показатели биомеханических параметров, которые определяют верхнюю и нижнюю границу, а так же среднее значение идеальной модели командной техники гребли экипажа для каждого из m переменных условий заезда. После чего, в процессе заезда для каждого из m переменных условий измеряют и запоминают в массиве памяти текущие индивидуальные биомеханические параметры гребцов, далее вычисляют групповые текущие биомеханические параметры и сравнивают со средним значением идеальной модели командной техники гребли экипажа, и в случае их отклонения от среднего значения идеальной модели последовательно и дискретно увеличивают воздействие внешних силовых добавок ƒ+j, j∈F. При возвращении параметров к среднему значению идеальной модели воздействие внешних силовых добавок корректируют в сторону уменьшения дополнительной нагрузки ƒ-j, j∈F и приводят ее к базовому значению, соответствующему сопротивлению водной среды и весу шлюпки с экипажем. При соответствии текущих групповых биомеханических параметров среднему значению идеальной модели командной техники гребли коррекцию не осуществляют.
Благодаря новой совокупности существенных признаков в заявленном способе достигается своевременная коррекция биомеханических параметров командной техники гребли, что обеспечивает достижение сформулированного результата - повышение слаженности и синхронности действий всех членов экипажа морского яла, путем своевременной коррекции биомеханических параметров командной техники гребли.
Заявленные объекты изобретения поясняются чертежами, на которых показаны:
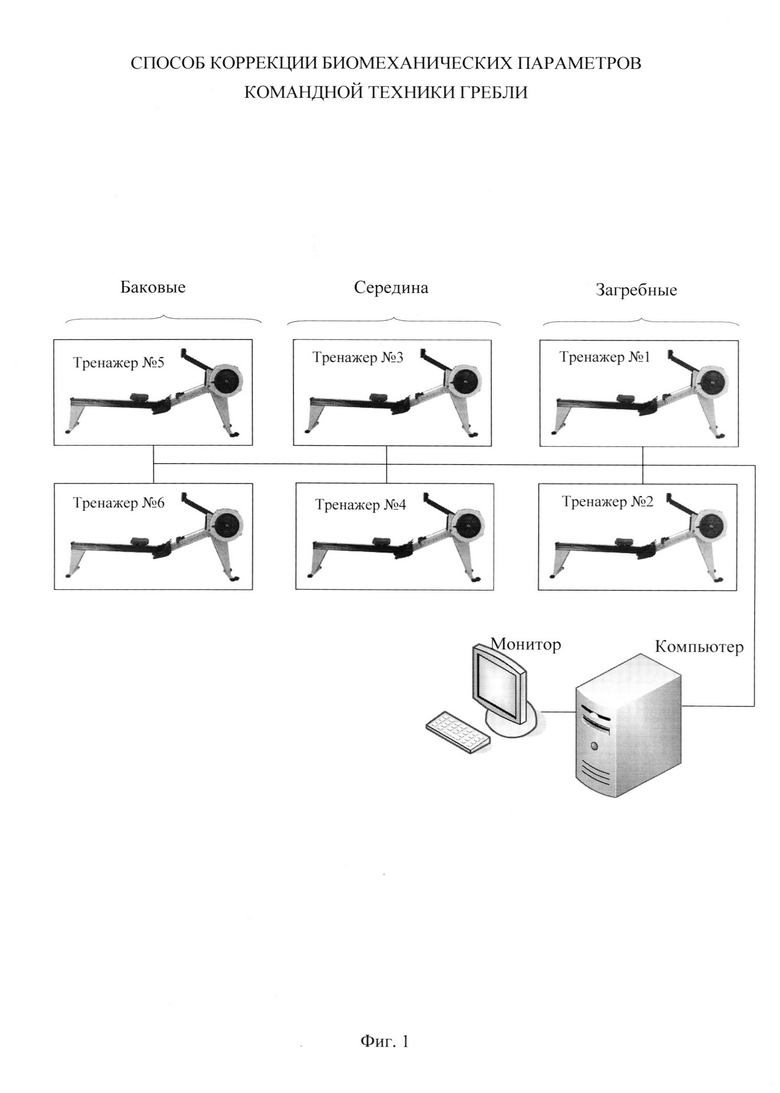
фиг. 1 - схема объединения гребных тренажеров в локальную вычислительную сеть;
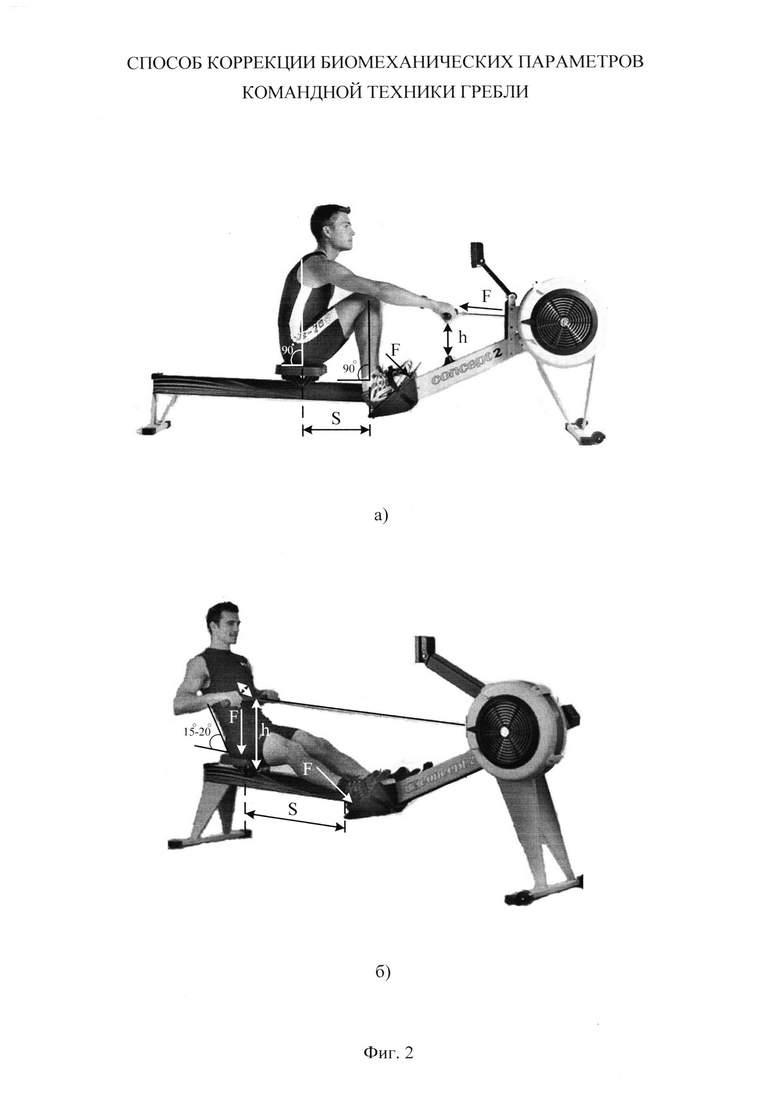
фиг. 2 - схема измеряемых индивидуальных биомеханических параметров гребной локомоции спортсмена в замкнутом цикле гребка;
фиг. 3 - структурная схема способа;
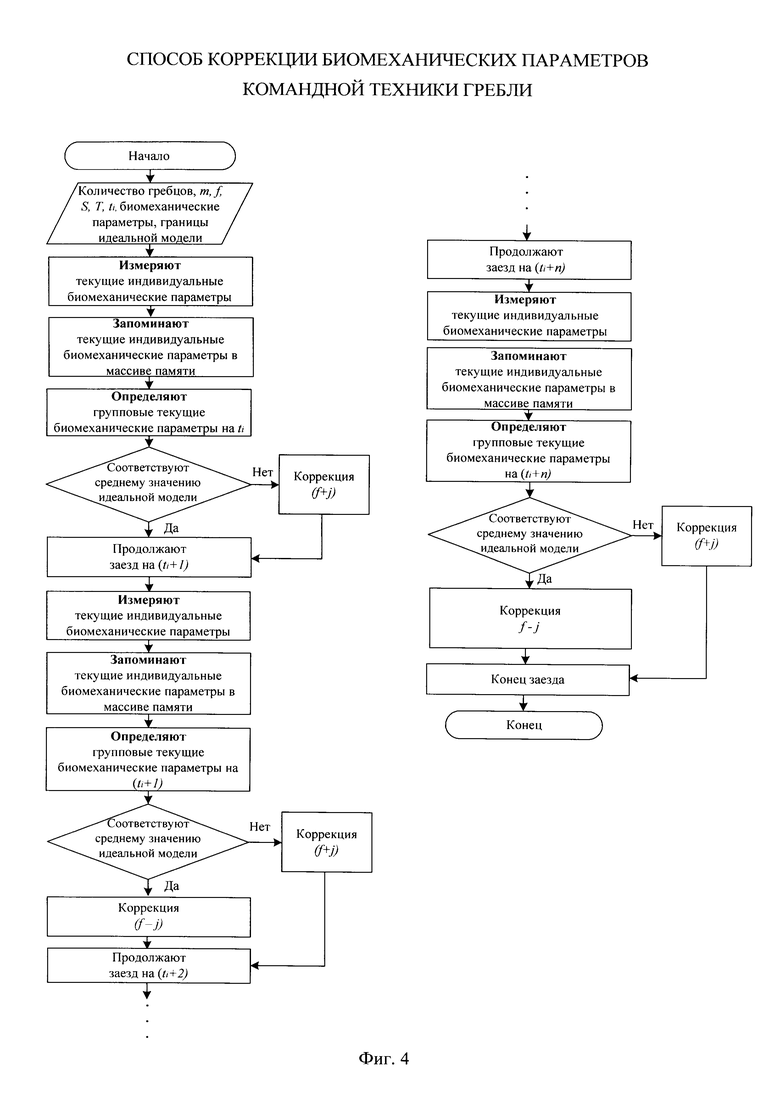
фиг. 4 - блок-схема алгоритма, реализующего способ;
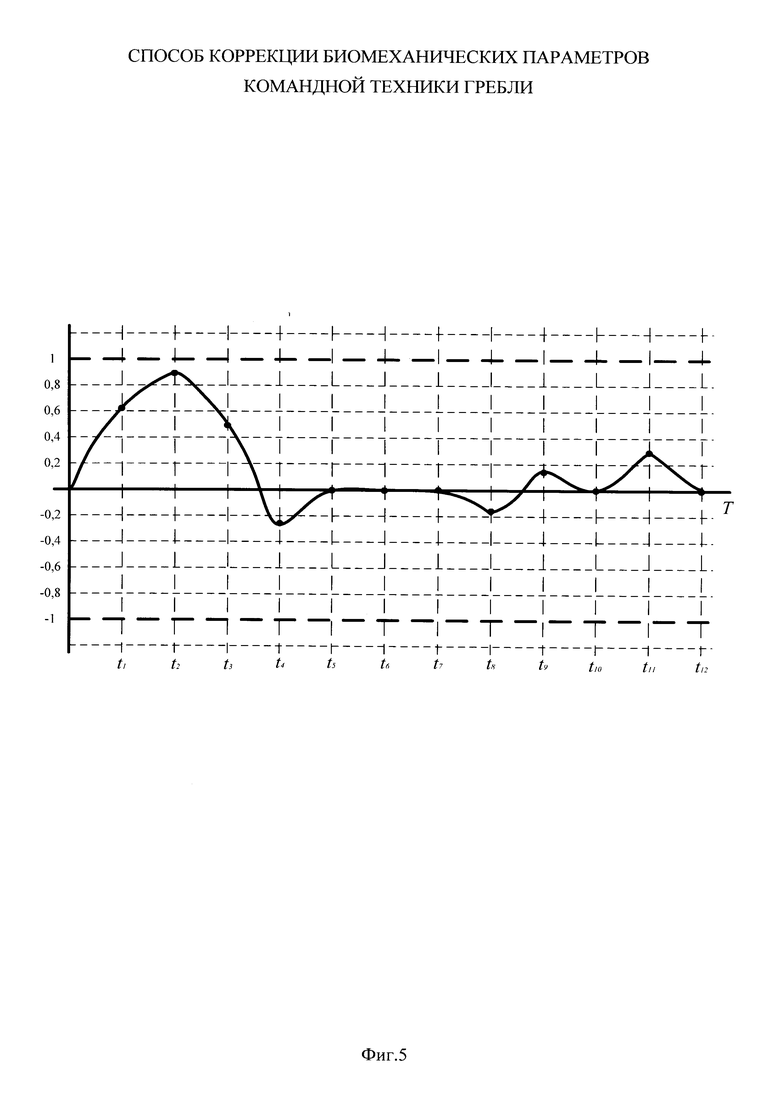
фиг. 5 - результаты исследований групповых текущих биомеханических параметров спортсменов при m предварительном условии заезда при ƒ различных уровнях внешних силовых нагрузок на интервале времени Т.
Реализация заявленного способа объясняется следующим образом. Известно, что гребля на морских ялах представляет собой технически сложный вид спорта, требующий от спортсменов точной координации в работе почти всех мышечных групп, к тому же этот вид спорта является командным, что предъявляет дополнительные требования к технической подготовленности гребцов, согласованности и синхронности их действий. Эмпирическим путем установлено, что неодновременное приложение сил со стороны экипажа вызывает увеличение рыскания лодки по курсу и потерю баланса, ведет к уменьшению мощности команды, создает неудобства для гребцов, что в конечном итоге приводит к снижению скорости лодки, см. Иванов Л.Н. и др. «Шлюпка. Устройство и управление» Изд. 2-е, испр. и доп. М.: Воениздат, 1976. - 231 с. стр. 48-54. Т.е. чем выше степень слаженных и синхронных действий в команде, тем равномернее распределяется нагрузка на ее членов, что придает шлюпке равномерное движение, оптимальную среднюю скорость и обеспечивает лучшие результаты при прохождении соревновательной дистанции. Отмеченное выше обуславливает актуальность разработки способов и устройств, позволяющих совершенствовать командную технику экипажа в гребле на морских ялах, в том числе и при тренировках на суше в осенне-зимний период, когда тренировочные заезды проводят на гребных тренажерах в спортивном зале.
Для этого в заявленном способе, предварительно в тренажерном зале, где будет проходить тренировка спортсменов-гребцов занимающихся спортивной греблей на морских ялах, устанавливают гребные тренажеры типа Concept 2 или им эквивалентные по числу членов экипажа таким образом, чтобы имитировалась рассадка гребцов по номерам в реальном яле, объединяют их в локальную вычислительную сеть, используя беспроводные технологии или витую пару и подключают к компьютеру с установленным на нем специальным программным обеспечением (фиг. 1). На каждом тренажере устанавливают датчики на рукоятках условных весел, подвижном сиденье, раме тренажера, ножных упорах, нагрузочном устройстве, а так же корпусе и голенях спортсменов. Далее формируют идеальную модель командной техники гребли следующим образом. Измеряют индивидуальные биомеханические параметры гребной локомоции каждого спортсмена, в качестве основных параметров используют характеристики замкнутого цикла гребка. Цикл гребка делят на четыре фазы: захват - переходная фаза, проводка - рабочая фаза цикла и конец проводки - вторая переходная фаза, подъезд - фаза подготовки. То, как все эти фазы сочетаются друг с другом, определяет ритм гребка, см. Стив Редгрейв «Энциклопедия гребли» М.: Издательство Достоинство, 2014. - 327 с. стр. 123-135. В фазе захвата (фиг. 2,а) измеряют расстояние от подвижного сиденья до ножных упоров и полезную высоту ручек условных весел относительно рамы тренажера. В фазе проводки измеряют максимальные усилия, прикладываемые на ножные упоры и рукоятки условных весел, фиксируют время подъезда подвижного сиденья от точки максимально близкой к ножным упорам, к точке наиболее удаленной от них. В фазе конца проводки (фиг. 2, б) измеряют угол отклонения корпуса гребца от вертикали, измеряют расстояние максимального отъезда подвижного сиденья от ножных упоров, измеряют полезную высоту ручек условных весел относительно рамы тренажера и расстояние ручек условных весел до корпуса гребца, измеряют максимальное усилие, прикладываемое на подвижное сиденье. В фазе подъезда фиксируют время подъезда подвижного сиденья от точки максимально удаленной от ножных упоров, к точке наиболее близкой к ним, измеряют максимальные усилия, прикладываемые на ножные упоры, измеряют вертикальное положение корпуса и голеней гребца.
Запоминают измеренные индивидуальные биомеханические параметры в массиве памяти и вычисляют по полученным значениям обобщенные групповые показатели биомеханических параметров, которые определяют верхнюю и нижнюю границу, а так же среднее значение идеальной модели командной техники гребли экипажа. Расстояние от верхней до нижней границы идеальной модели нормализуется от 1 до -1 с шагом дискретизации а. Метками времени ti разбивают весь временной интервал Т заезда m на контрольные точки измерения групповых текущих биомеханических параметров.
Тренер при подготовке к очередному заезду m устанавливает уровни внешних силовых добавок ƒ. В качестве базового, используемого в заезде уровня силовой нагрузки ƒ выбирают внешние нагрузки, имитирующие сопротивление водной среды и вес морского яла с экипажем ƒ, с возможностью (ƒ±j), j∈F, что позволяет организовать устойчивую обратную связь по коррекции биомеханических параметров командной техники гребли.
В процессе заезда, информация с датчиков через устройство сопряжения поступает в компьютер и регистрируется в массиве памяти, на метке ti из полученной выборки формируется текущее групповое значение биомеханических параметров, которое в виде диаграммы выводится на монитор. Одновременно компьютер формирует соответствующий управляющий сигнал на электромагнитное тормозное устройство, которое создает дополнительный тормозной импульс на нагрузочные устройства гребных тренажеров, тем самым осуществляя коррекцию внешних силовых добавок (ƒ±j), j∈F.
Предлагаемая структурная схема способа иллюстрируется на фиг. 3. Работа способа, представленного на фиг. 3, осуществляется в соответствии с алгоритмом, изображенным на фиг. 4.
Измеряют текущие индивидуальные биомеханические параметры для условия заезда m в интервале времени Т, записывают полученную информацию в массив памяти. Разбивают временной интервал Т на метки ti. Вычисляют текущие групповые биомеханические параметры на первой метке ti. Если текущее групповое значение биомеханических параметров не отклоняется от среднего значения идеальной модели командной техники гребли, то продолжают заезд при базовом уровне внешних силовых нагрузок ƒ. Если на интервале ti текущие групповые биомеханические параметры отклоняются от среднего значения идеальной модели, то последовательно и дискретно увеличивают внешние силовые нагрузки (ƒ+j), j∈F, до тех пор, пока не будет осуществлен возврат текущего группового показателя к среднему значению идеальной модели. При возвращении текущих групповых биомеханических параметров к среднему значению идеальной модели воздействие внешних силовых добавок корректируют в сторону уменьшения дополнительной нагрузки ƒ-j, j∈F и приводят ее к базовому значению, соответствующему сопротивлению водной среды и весу шлюпки с экипажем ƒ. Продолжают заезд с уровнем внешней силовой нагрузки ƒ, измеряют и корректируют текущие групповые биомеханические параметры на каждой последующей метке ti аналогично, до тех пор, пока время заезда не закончится.
В экспериментах с привлечением более 10 экипажей морских ялов было установлено, что слаженные, синхронные действия всех членов экипажа зависят от m переменных условий заезда по каждому из ƒ предварительно определенных уровней внешних силовых нагрузок. То есть, искусственно создаваемые дополнительные нагрузки, направлены на принудительное вовлечение в движение всех членов экипажа для выполнения ими слаженных, синхронных действий в соответствии с заранее определенными биомеханическими параметрами, с возможностью своевременной целенаправленной коррекцией этих параметров. Таким образом, многократное повторение технически правильных действий в искусственно созданных условиях внешних силовых нагрузок, вырабатывает мышечные ощущения, которые позволяют контролировать спортсменам ритмо-темповую структуру командной техники гребли в составе экипажа морского яла, см. Лазуткин В.М., Особенности командной техники в академической гребле и пути повышения ее эффективности. Дис. канд. пед. наук. - Л., 1982, 179 с.
Пусть, для примера, проводим тренировку с шестью гребцами экипажа морского яла, в тренажерном зале, оборудованном шестью гребными тренажерами типа Concept 2 или им эквивалентными. Гребные тренажеры объединены в локальную вычислительную сеть и подключены к компьютеру с установленным на нем специальным программным обеспечением, на каждом тренажере дополнительно установлены измерительные датчики. На фиг. 5 показаны результаты измерений групповых текущих биомеханических параметров спортсменов при проведении m заезда с (ƒ±j) уровнем внешних силовых нагрузок, с выводом текущего группового показателя биомеханических параметров.
Анализируют результаты измеренных значений текущих групповых показателей биомеханических параметров на интервале времени T, шаг дискретизации а от 1 до -1 составляет 0,2. Тренер проводит заезд m по базовому уровню внешних силовых нагрузок ƒ и контролирует по монитору результаты измерений групповых текущих биомеханических параметров спортсменов в соответствии с временными метками ti. Компьютер анализирует данные текущих групповых значений биомеханических параметров экипажа морского яла на метке t1. Текущее групповое значение биомеханических параметров экипажа на метке t1 соответствует уровню 0,61, что является значительным отклонением от среднего значения идеальной модели. Компьютер формирует управляющий сигнал на электромагнитное тормозное устройство, тем самым осуществляя коррекцию внешних силовых нагрузок (ƒ+1), результат коррекции измеряют на метке t2, текущее групповое значение биомеханических параметров соответствует уровню 0,88, что также является значительным отклонением от среднего значения идеальной модели. Компьютер формирует управляющий сигнал для дальнейшей коррекции внешних силовых нагрузок (ƒ+2), результат коррекции измеряют на метке t3, текущее групповое значение биомеханических параметров соответствует уровню 0,5, что также является отклонением от среднего значения идеальной модели. Компьютер формирует управляющий сигнал для дальнейшей коррекции внешних силовых нагрузок (ƒ+3), результат коррекции измеряют на метке t4, текущее групповое значение биомеханических параметров соответствует уровню -0,25, что также является отклонением от среднего значения идеальной модели. Компьютер формирует управляющий сигнал для дальнейшей коррекции внешних силовых нагрузок (ƒ+4), результат коррекции измеряют на метке t5, текущее групповое значение биомеханических параметров соответствует уровню 0, что является средним значением идеальной модели. Компьютер формирует управляющий сигнал для коррекции внешних силовых нагрузок (ƒ-4), результат коррекции измеряют на метке времени t6, текущее групповое значение биомеханических параметров соответствует уровню 0, что является средним значением идеальной модели. Компьютер формирование управляющего сигнала для дальнейшей коррекции не осуществляет. Компьютер продолжает обрабатывать поступающую информацию о текущих групповых значениях биомеханических параметров, на метке времени t7 текущее групповое значение биомеханических параметров соответствует уровню 0, что является средним значением идеальной модели. Компьютер формирование управляющего сигнала для дальнейшей коррекции не осуществляет. Компьютер продолжает обрабатывать поступающую информацию о текущих групповых значениях биомеханических параметров, на метке времени t8, текущее групповое значение биомеханических параметров соответствует уровню -0,18, что является отклонением от среднего значения идеальной модели. Компьютер формирует управляющий сигнал для коррекции внешних силовых нагрузок (ƒ+1), результат коррекции измеряют на метке t9, текущее групповое значение биомеханических параметров соответствует уровню 0,15, что также является отклонением от среднего значения идеальной модели. Компьютер формирует управляющий сигнал для дальнейшей коррекции внешних силовых нагрузок (ƒ+2), результат коррекции измеряют на метке времени t10, текущее групповое значение биомеханических параметров соответствует уровню 0, что является средним значением идеальной модели. Компьютер формирует управляющий сигнал для коррекции внешних силовых нагрузок (ƒ-2), результат коррекции измеряют на метке времени t11, текущее групповое значение биомеханических параметров соответствует уровню 0,3, что является отклонением от среднего значения идеальной модели. Компьютер формирует управляющий сигнал для дальнейшей коррекции внешних силовых нагрузок (ƒ+1), результат коррекции измеряют на метке времени t12, текущее групповое значение биомеханических параметров соответствует уровню 0, что является средним значением эталонного коридора. Дальнейшую коррекцию не осуществляют, так как заканчивается время заезда Т.
Перечисленные действия по коррекции биомеханических параметров командной техники гребли выполняют для каждого из m переменных условий тренировочного заезда экипажа морского яла на гребных тренажерах. Так как многократное повторение технически правильных действий в искусственно созданных условиях внешних силовых нагрузок приводит к «мышечному» запоминанию спортсменами ритмо-темповой структуры командной техники гребли и, следовательно, повышению слаженности и синхронности действий гребцов в составе экипажа морского яла.
Таким образом, за счет повышения слаженности и синхронности действий экипажа морского яла, путем коррекции биомеханических параметров командной техники гребли, обеспечивается достижение сформулированного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции состава экипажа морского яла с позиции биомеханической совместимости | 2019 |
|
RU2704389C1 |
| Способ оперативной коррекции параметров тренировочных нагрузок спортсменов-гребцов | 2020 |
|
RU2756451C1 |
| СПОСОБ ТРЕНИРОВКИ ГРЕБЦОВ И ТРЕНАЖЕР-ЭРГОМЕТР ДЛЯ АКАДЕМИЧЕСКОЙ ГРЕБЛИ | 1999 |
|
RU2162003C1 |
| ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ГРЕБЦОВ | 2012 |
|
RU2512792C1 |
| ТРЕНАЖЕР ДЛЯ ГРЕБЦОВ | 2022 |
|
RU2791091C1 |
| ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ГРЕБЦОВ АКАДЕМИЧЕСКОЙ ГРЕБЛИ | 2016 |
|
RU2606075C1 |
| Устройство для тренировки гребцов | 1987 |
|
SU1443904A1 |
| Устройство для тренировки гребцов | 1987 |
|
SU1416143A1 |
| Автоматизированный тренажер для экипажа гребцов | 1979 |
|
SU919690A1 |
| Устройство для тренировки гребцов | 1987 |
|
SU1505559A1 |

Изобретение относится к области спорта, а именно к спортивной гребле на морских ялах, и может быть использовано для обучения и тренировки спортсменов-гребцов слаженной, синхронной работе в составе экипажа морского яла на суше, в условиях, максимально приближенных к тренировочному процессу, проводимому на воде.
Способ коррекции биомеханических параметров командной техники гребли, заключающийся в том, что с помощью программно-управляющего устройства создают дополнительные внешние нагрузки, имитирующие сопротивление водной среды. Согласно изобретению, предварительно объединяют гребные тренажеры в локальную вычислительную сеть и подключают к компьютеру, устанавливают датчики на рукоятках условных весел, подвижном сиденье, раме тренажера, ножных упорах, нагрузочном устройстве, корпусе и голенях спортсменов, после чего, измеряют и запоминают индивидуальные биомеханические параметры гребной локомоции каждого спортсмена, вычисляют по полученным значениям обобщенные групповые показатели биомеханических параметров, которые определяют верхнюю и нижнюю границу, а так же среднее значение идеальной модели командной техники гребли экипажа для каждого из m переменных условий заезда, после чего, в процессе заезда для каждого из m переменных условий измеряют и запоминают в массиве памяти текущие индивидуальные биомеханические параметры гребцов, вычисляют групповые текущие биомеханические параметры и сравнивают со средним значением идеальной модели командной техники гребли экипажа, и в случае их отклонения от среднего значения идеальной модели последовательно и дискретно увеличивают воздействие внешних силовых добавок  при возвращении параметров к среднему значению идеальной модели воздействие внешних силовых добавок корректируют в сторону уменьшения дополнительной нагрузки
при возвращении параметров к среднему значению идеальной модели воздействие внешних силовых добавок корректируют в сторону уменьшения дополнительной нагрузки  и приводят ее к базовому значению, соответствующему сопротивлению водной среды и весу шлюпки с экипажем, при соответствии текущих групповых биомеханических параметров среднему значению идеальной модели командной техники гребли коррекцию не осуществляют.
и приводят ее к базовому значению, соответствующему сопротивлению водной среды и весу шлюпки с экипажем, при соответствии текущих групповых биомеханических параметров среднему значению идеальной модели командной техники гребли коррекцию не осуществляют.
Таким образом, осуществляют своевременную коррекцию биомеханических параметров командной техники гребли, что позволяет повысить уровень слаженной, синхронной работы экипажа морского яла. 2 з.п. ф-лы, 6 ил.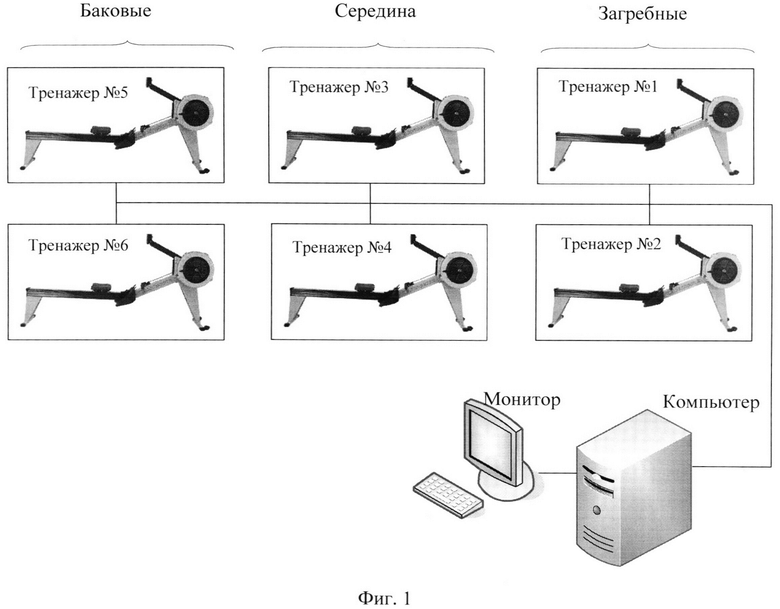
1. Способ коррекции биомеханических параметров командной техники гребли, заключающийся в том, что с помощью программно-управляющего устройства создают дополнительные внешние нагрузки, имитирующие сопротивление водной среды, отличающийся тем, что предварительно объединяют гребные тренажеры в локальную вычислительную сеть и подключают к компьютеру, устанавливают датчики на рукоятках условных весел, подвижном сиденье, раме тренажера, ножных упорах, нагрузочном устройстве, корпусе и голенях спортсменов, после чего, измеряют и запоминают индивидуальные биомеханические параметры гребной локомоции каждого спортсмена, вычисляют по полученным значениям обобщенные групповые показатели биомеханических параметров, которые определяют верхнюю и нижнюю границу, а так же среднее значение идеальной модели командной техники гребли экипажа для каждого из m переменных условий заезда, после чего, в процессе заезда для каждого из m переменных условий измеряют и запоминают в массиве памяти текущие индивидуальные биомеханические параметры гребцов, вычисляют групповые текущие биомеханические параметры и сравнивают со средним значением идеальной модели командной техники гребли экипажа, и в случае их отклонения от среднего значения идеальной модели последовательно и дискретно увеличивают воздействие внешних силовых добавок  при возвращении параметров к среднему значению идеальной модели воздействие внешних силовых добавок корректируют в сторону уменьшения дополнительной нагрузки
при возвращении параметров к среднему значению идеальной модели воздействие внешних силовых добавок корректируют в сторону уменьшения дополнительной нагрузки  и приводят ее к базовому значению, соответствующему сопротивлению водной среды и весу шлюпки с экипажем, при соответствии текущих групповых биомеханических параметров среднему значению идеальной модели командной техники гребли коррекцию не осуществляют.
и приводят ее к базовому значению, соответствующему сопротивлению водной среды и весу шлюпки с экипажем, при соответствии текущих групповых биомеханических параметров среднему значению идеальной модели командной техники гребли коррекцию не осуществляют.
2. Способ по п. 1, отличающийся тем, что идеальную модель командной техники гребли экипажа формируют по биомеханическим параметрам правого загребного.
3. Способ по п. 1, отличающийся тем, что идеальную модель командной техники гребли экипажа формируют по биомеханическим параметрам эталонных спортсменов.
| СПОСОБ ТРЕНИРОВКИ ГРЕБЦОВ И ТРЕНАЖЕР-ЭРГОМЕТР ДЛЯ АКАДЕМИЧЕСКОЙ ГРЕБЛИ | 1999 |
|
RU2162003C1 |
| RU 2006137434 A, 27.04.2008 | |||
| ТРЕНАЖЕР ДЛЯ СПОРТСМЕНОВ-БАЙДАРОЧНИКОВ | 2001 |
|
RU2182028C1 |

