Введение
Изобретение относится к области соединительной техники. Более конкретно, изобретение относится к области разъемных винтообразных соединительных средств.
Уровень техники и недостатки
Соединительные средства для разъемного соединения предметов известны в течение длительного времени в виде винтовых соединений. При этом называемое в данном случае «крепежным средством» первое подвижное (в данном случае отдельное) тело соединяется с подходящим для этого называемым в данном случае «крепежным основанием» вторым телом с помощью вращательного относительного движения. Второе тело может быть также подвижным (мобильным) или (по существу) также неподвижным (не мобильным).
Крепежное средство может быть снабжено наружной резьбой (в виде винта). В таком случае крепежное основание снабжено подходящей внутренней резьбой. Оно также может быть подвижным (в виде гайки) и служить, таким образом, исключительно, для крепления. Однако, оно может быть расположено также и в другом предмете или быть его частью (резьбовым отверстием), при этом другой предмет выполняет, по существу, другие функции (например, кузова, стенки).
Крепежное средство может быть снабжено внутренней резьбой (в виде гайки). В таком случае крепежное основание снабжено подходящей наружной резьбой. Оно также может быть подвижным (в виде винта) и служить, таким образом, исключительно, для крепления. Однако, оно может быть расположено также и на другом предмете или являться его частью (шпилькой с резьбой по всей длине или установочным винтом), при этом другой предмет выполняет, по существу, другие функции (например, блока цилиндров двигателя).
Недостаток известных крепежных средств заключается в том, что они в зависимости от длины резьбы и шага резьбы требуют большого количества оборотов для достижения своего конечного положения (состояние крепления) или для обеспечения полного отвинчивания из своей сопрягаемой детали. Для этого требуется, соответственно, много времени. Если наряду с этим еще и существуют пространственные ограничения, то это время также дополнительно увеличивается, так как пользователь может поворачивать соответствующий инструмент (отвертку, гаечный ключ) только под небольшими углами и должен его время от времени устанавливать повторно.
Для этой цели из уровня техники известны трещотки и тому подобные инструменты, которые позволяют производить более быстрое крепление и разъединение или по меньшей мере избегать повторных установок. Известны также приводные инструменты. Однако, все такие решения требуют по меньшей мере одной установки инструмента на винт или гайку для их закрепления в крепежном основании или их отвинчивания из него. Если из крепежного основания необходимо отвинтить несколько крепежных средств, то в таком случае необходимое для этого время возрастает соответствующим образом.
Усовершенствованное крепежное средство известно, например, из документа US 2002/0071738 A1. Оно с помощью механических выступов, втягивающихся в тело крепежного средства, удерживается в крепежном основании. Для удаления крепежных средств необходимо использовать специальный механический инструмент; с помощью его установки на крепежное средство выступы втягиваются вовнутрь него, и, соответственно, их можно сжимать вовнутрь, так что средство удаляется из крепежного основания.
Следующий недостаток заключается в наличии множества различных геометрических форм зацепления (профилей захвата). К известным геометрическим формам относятся, например, шлицы или крестообразные шлицы, внутренние или наружные шестигранники, или так называемые "Torx" (винты с внутренним шестигранником согласно требованиям стандарта EN ISO 10664). Так как часто используются соединительные средства с различной геометрической формой зацепления в конструктивных элементах, то в связи с этим необходимо иметь в распоряжении соответствующее количество различных инструментов; в противном случае, конструктивные элементы нельзя будет монтировать или демонтировать. Также для указанного выше крепежного средства требуется специальный, предусмотренный для этого инструмент.
Часто проблема заключается в повреждении геометрических форм зацепления при завинчивании, а позже также и при отвинчивании крепежного средства из крепежного основания, возникающего в результате воздействия больших усилий завинчивания. Применение динамометрических ключей таких типов, которые известны уже в течение длительного времени (например, документ US 2159354 за 1939 год) не получило распространения во всех областях техники, так как такой ключ, в свою очередь, является специальным инструментом.
Для отвинчивания, например, описанного в документе DE 10313170 В3 крепежного средства не требуется никакого инструмента; здесь отвинчивание забивного штифта производиться с помощью приведения в действие простой нажимной кнопки.
Также не требуется никакого инструмента, а необходим только электрический ток для отвинчивания из крепежного основания крепежного средства, описанного в документах DE 102004004658 A и US 2005/0172462 A1. Под действием тока происходит нагревание компонентов из сплава с эффектом памяти или биметалла, в результате чего они деформируются таким образом, что становится возможным их отвинчивание.
Следующая возможность отсоединения крепежного устройства предлагается в документе DE 19507065 A1. При нормальных условиях окружающей среды стабильные механические компоненты отсоединяются с помощью текучей среды (например, воды или водяного пара), так что затем предварительно напряженный пружинный механизм обеспечивает собственно энергию разъединения, которая приводит к втягиванию закрепленных с геометрическим замыканием в крепежном основании элементов. Также предлагается (реверсивное) движение элементов с помощью механического сцепления с набухаемыми компонентами.
Названные выше крепежные элементы с электрическим приводом могут обеспечивать только незначительные силы, так что они применяются только в таких ситуациях, в которых для разъединения требуются незначительные силы. Химически растворяемые крепежные средства обладают недостатком, который заключается в том, что их можно будет привести в действие только один раз или же по меньшей мере они требуют длительного времени включения.
Следующий недостаток обоснован известным фактом, что смонтированные соединительные средства через определенный промежуток времени можно отсоединить только с большим трудом или вообще нельзя отсоединить. Это может произойти, например, под действием ползучей коррозии. Эту проблематику пытались решить с малым успехом с помощью нанесения соответствующих покрытий.
Следующая проблема возникает, в особенности, при использовании групп из крепежных средств, которые вместе служат для соединения двух или нескольких конструктивных элементов (например, грязезащитного крыла транспортного средства, облицовочной панели на стенке). Необходимое для крепления и, соответственно, для разъединения конструктивных элементов время возрастает линейно с количеством крепежных элементов, а это при больших количествах приводит к очень длительному времени. Известные решения с упругими закреплениями (например, пластмассовые зажимы) хотя и экономят время при креплении, однако, в такой же мере разъединение происходит труднее и уже занимает больше времени. Возможность снижения необходимого для разъединения времени заключается в использовании крепежных средств с электрическим или приводимым в действие с помощью текучей средой приводом (см. выше), при этом далее их использование ограничивается для случаев с небольшими усилиями при разъединении и, соответственно, медленными периодами времени включения.
Основанное также на приводимом в действие с помощью текучей среды приводе решение описано в документе DE 4214206 A1. Здесь рабочий цилиндр, работающий с преодолением усилия тарельчатых пружин, на котором в осевом направлении установлен болт с шаровым шарниром, перемещается с помощью текучей среды (например, жидкости для гидросистем). В закрепленном положении он воздействует при помощи одной из тарельчатых пружин усилием на подлежащую креплению рейку. Для срабатывания на рабочий цилиндр воздействует давление, так что болт приподнимается от рейки и отпускает ее. Недостаток такого решения заключается в жестком усилии зажима, которое задают тарельчатые пружины, а также в необходимости создавать с помощью рабочего цилиндра необходимое давление, которое должно преодолевать давление удерживания тарельчатых пружин.
Задача изобретения и решение
В основу изобретения положена задача по созданию крепежного средства, которое позволяет производить быстрое отсоединение крепежного средства из крепежного основания. Для этого не потребуются специальные инструменты. Время, которое необходимо для отсоединения нескольких крепежных средств, должно быть коротким по сравнению с традиционными решениями. Крепежное средство должно легко отсоединяться также и в том случае, если будут приложены очень большие силы соединения (силы трения сцепления между крепежным средством и крепежным основанием). Наряду с этим, также и группы крепежных средств должны в течение короткого времени соединяться и/или отсоединяться.
Задача решается с помощью крепежного средства по п. 1 формулы изобретения. Другие предпочтительные варианты осуществления следуют из зависимых пунктов формулы изобретения, приведенной ниже описания, а также из фигур.
Описание
Изобретение включает два основных типа крепежных средств. Наряду с этим, будут описаны признаки, которые являются общими для обоих типов.
Крепежное средство с дистанционным управлением для разъемного соединения конструктивных элементов согласно настоящему изобретению содержит продольную ось и по меньшей мере одно крепежное тело для введения в крепежное основание. При этом крепежное основание, как было указано выше, предусмотрено для создания разъемного соединения с крепежным средством, между тем, как оно по меньшей мере частично размещено в крепежном основании.
Для этого крепежное тело содержит анкер, вводимый в крепежное основание, при этом анкер предусмотрен для геометрического и/или фрикционного закрепления крепежного средства в крепежное основание. Для этого он перемещается по меньшей мере в первое направление. Для отсоединения крепежного средства из крепежного основания анкер (соответственно, если предусмотрено несколько первых направлений), перемещается во второе направление, противоположное первому направлению.
Далее анкер соединен или по меньшей мере выполнен с возможностью соединения с приводом с дистанционным управлением, предусмотренным для работы с помощью текучей средой, и перемещается с его помощью по меньшей мере во второе направление. Задача привода заключается в перемещении анкера по меньшей мере во второе направление (направление для отсоединения), в котором анкер принимает такое положение, которое позволяет отсоединять его - и, таким образом, крепежное средство - из крепежного основания. Необязательно привод может перемещать анкер также и в первое направление, которое служит для крепления.
Согласно изобретению привод представляет собою приводимый в действие с помощью текучей среды (также и ведомый с помощью текучей среды) привод. Это означает, что привод предусмотрен для работы с помощью текучей среды, а также жидкости, газа или их смеси. Также твердые тела, например, небольшие резиновые шарики можно подмешивать в текучую среду для повышения импульса. Дистанционное управление обеспечивается с помощью включения и, соответственно, отключения расположенного на расстоянии источника давления.
Кроме того, привод расположен внутри, то есть, в крепежном средстве. Это имеет преимущество, заключающееся в том, что крепежное средство можно заменять обычным винтом или другим крепежным средством и при этом не возникает необходимость в проведении значительных конструктивных согласований с соединяемым конструктивным элементом.
Наряду с этим привод пригоден для перемещения анкера по меньшей мере во второе направление.
Ниже будут описаны признаки, которые характеризуют первый основной тип.
В соответствии с этим анкер содержит по меньшей мере две отдельные части и, соответственно, первое направление, в которое перемещается каждая из этих отдельных частей, проходит радиально от продольной оси.
И, наконец, каждая из этих отдельных частей содержит проходящий перпендикулярно продольной оси выступ, который может взаимодействовать с геометрическим зацеплением с поднутрением крепежного основания.
Второй основной тип обладает общими признаками с первым основным типом: «крепежное тело», «крепежное основание», «анкер», «возможность перемещения анкера по меньшей мере в первое направление», «разъединение с помощью перемещения во второе направление», «перемещение с помощью расположенного внутри, дистанционно управляемого и предусмотренного для работы с помощью жидкой среды привода по меньшей мере во второе направление». Во избежание повторений будут делаться ссылки на указанные выше варианты осуществления.
Однако, первое направление представляет собою вращение вокруг продольной оси, а анкер представляет собою цилиндр с наружной резьбой, которая может взаимодействовать с геометрическим замыканием с внутренней резьбой в крепежном основании. Другими словами, в то время как первый основной тип содержит работающий линейный привод, второй основной тип содержит работающий вращающийся привод, в результате чего возникают конструктивные различия. В особенности, признаки расположенных внутри приводимых в действие с помощью текучей среды приводов являются общими для обоих основных типов.
За счет применения взаимодействующего с крепежным средством приводимого в действие с помощью текучей среды привода, отсоединение и, соответственно, крепление крепежного средства может производиться очень быстро. Потребность в специальных инструментах отпадает, так как привод приводят в действие за счет подвода давления (как правило, избыточного давления). Так как в случае, когда к нескольким крепежным средствам можно совместно подводить давление, они, таким образом, также приводятся в действие все вместе, так что за короткое время может приводиться в действие большое количество крепежных средств согласно изобретению. Так как под действием давления на привод и, таким образом, на анкер также воздействуют большие силы, крепежное средство легко отсоединяется также и в том случае, если силы соединения будут очень большими.
В дальнейшем предпочтительные варианты осуществления описываются посредством примеров и со ссылками на приведенные ниже прилагаемые фигуры.
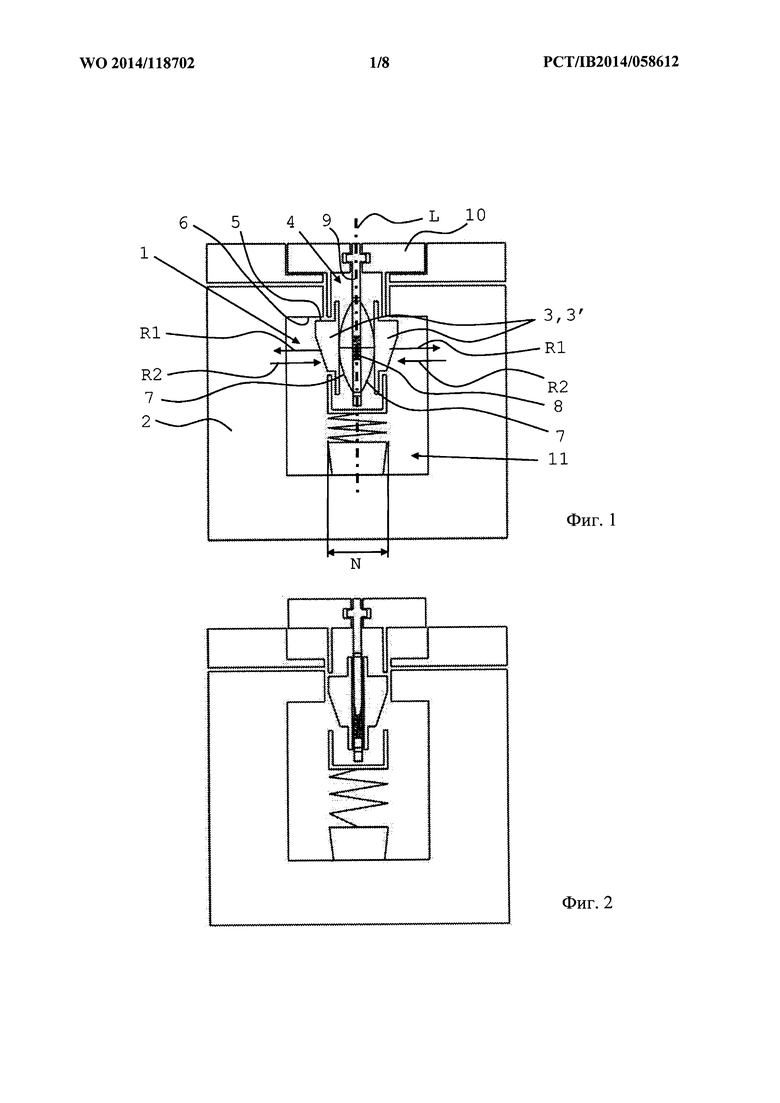
На фиг. 1 представлен вид по сечению варианта осуществления первого основного типа крепежного средства согласно изобретению в первом положении.
На фиг. 2 представлен вариант осуществления согласно фиг. 1 во втором положении.
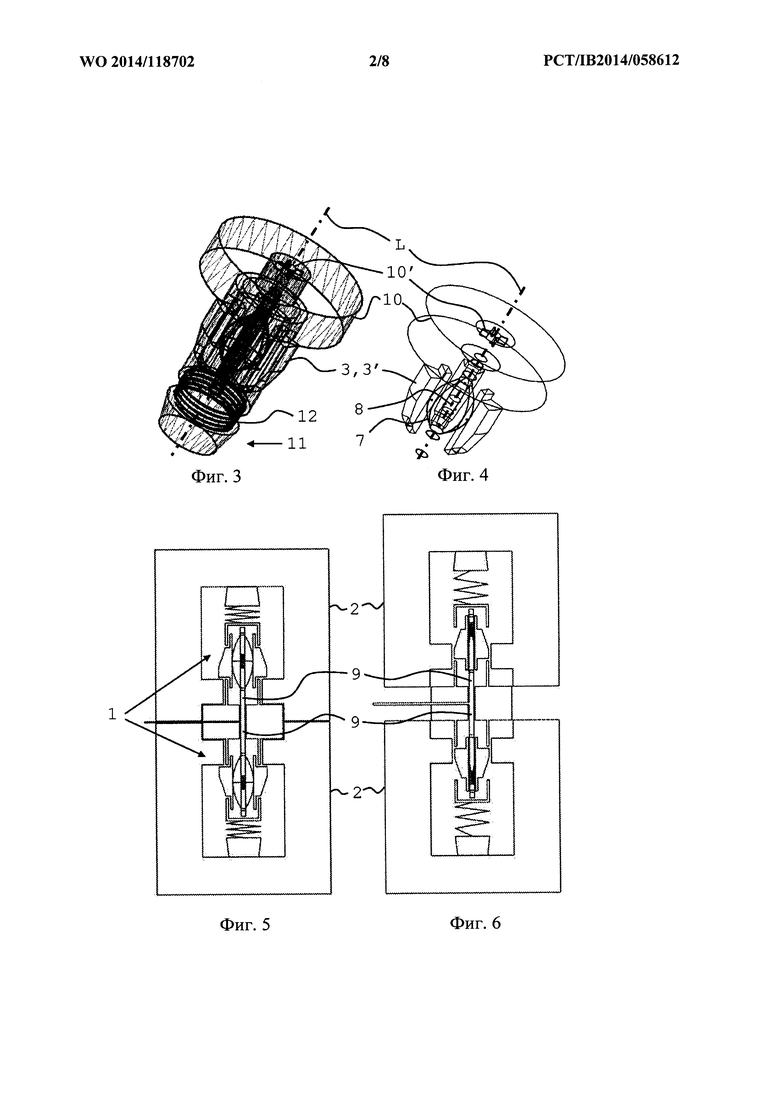
На фиг. 3 представлен вид в перспективе варианта осуществления первого основного типа крепежного средства согласно изобретению в виде проволочной модели.
На фиг. 4 представлены фрагменты варианта осуществления согласно фиг. 3.
На фиг. 5 представлен вид сбоку в разрезе варианта осуществления согласно фиг. 1 с двумя концами анкера в первом положении.
На фиг. 6 представлен вариант осуществления согласно фиг. 5 во втором положении.
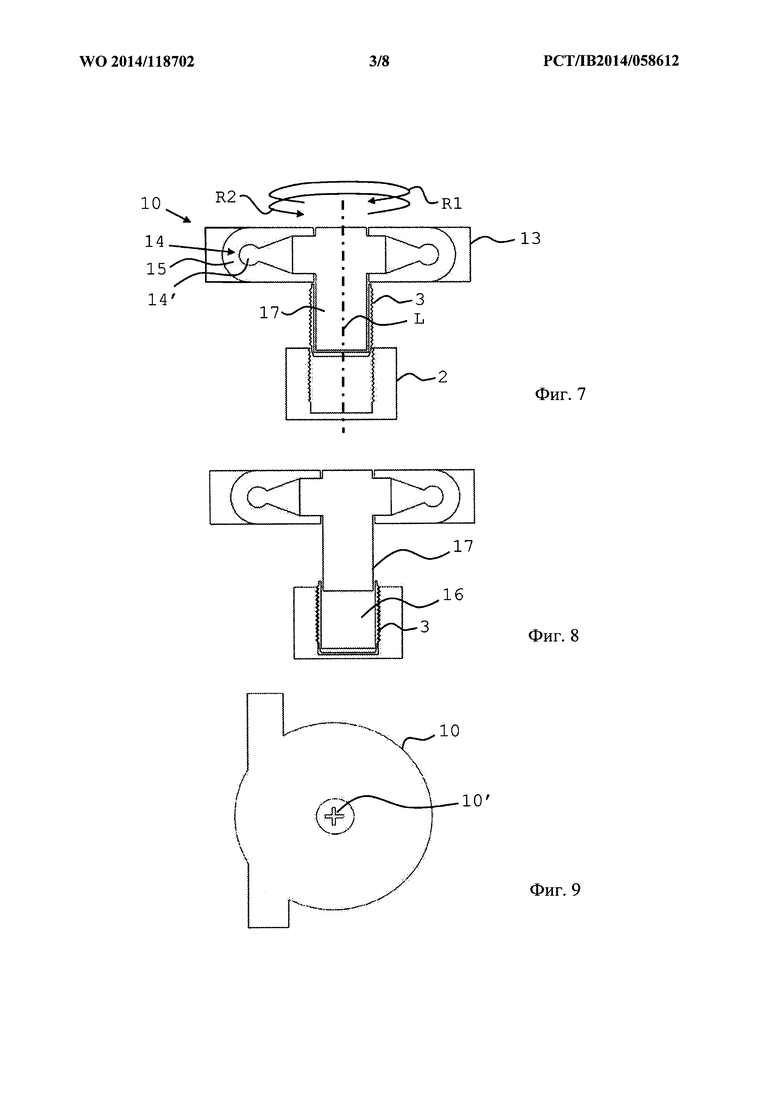
На фиг. 7 представлен вид в разрезе варианта осуществления второго основного типа крепежного средства согласно изобретению в первом положении.
На фиг. 8 представлен вариант осуществления согласно фиг. 7 во втором положении.
На фиг. 9 представлен вид сверху варианта осуществления согласно фиг. 7 и фиг. 8.
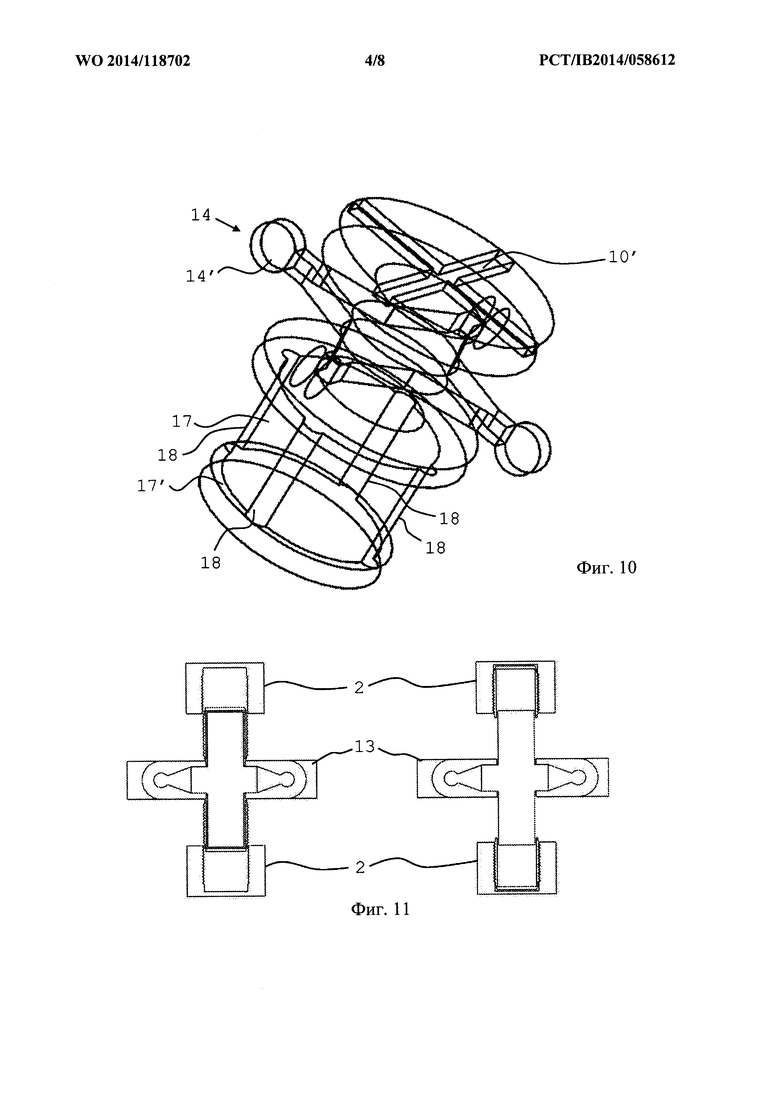
На фиг. 10 представлен вид в перспективе компонентов варианта осуществления согласно фиг. 7-9.
На фиг. 11 представлены два вида сбоку различных положений одного варианта осуществления согласно фиг. 7 с двумя концами анкера.
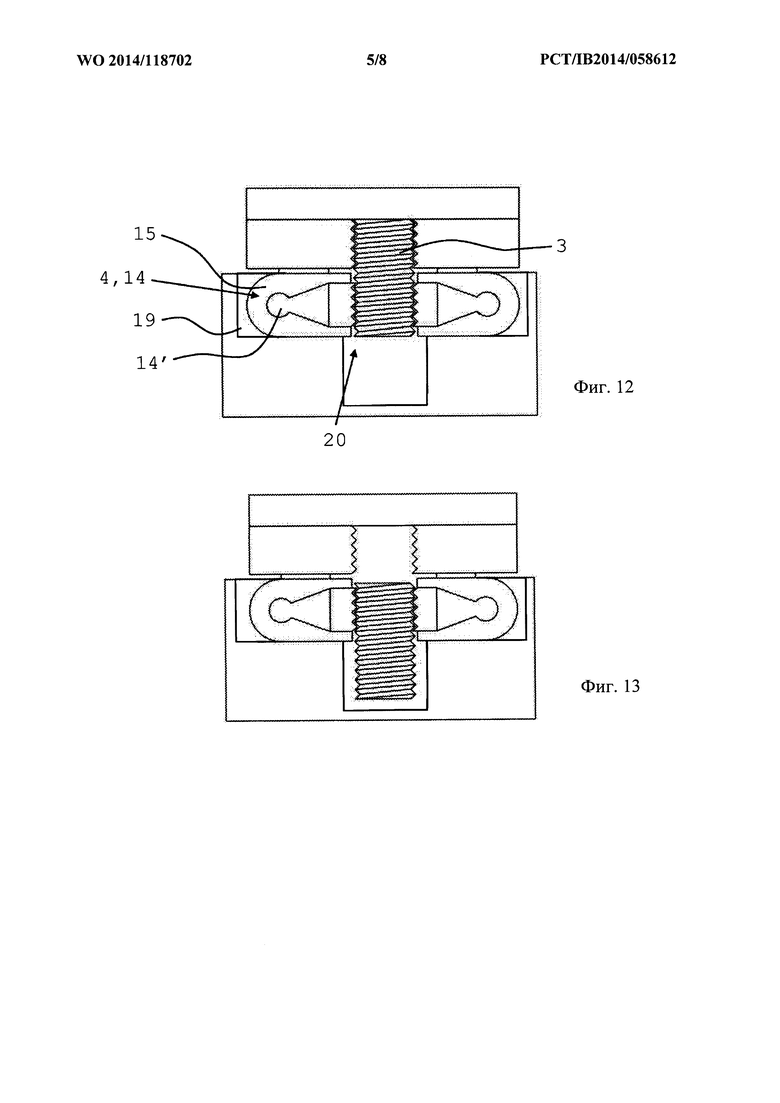
На фиг. 12 представлен вид по сечению другого варианта осуществления второго основного типа крепежного средства согласно изобретению в первом положении.
На фиг. 13 предусмотрен вариант осуществления согласно фиг. 12 во втором положении.
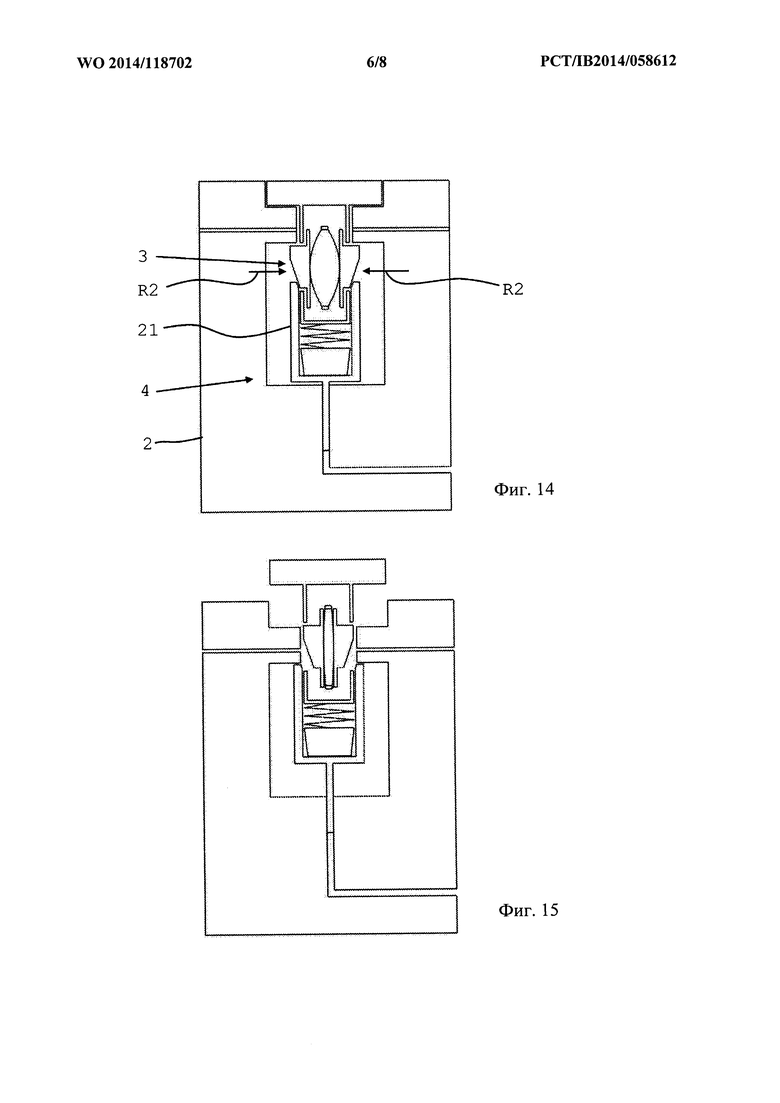
На фиг. 14 представлен вид по сечению другого варианта осуществления первого основного типа крепежного средства согласно изобретению в первом положении.
На фиг. 15 представлен вариант осуществления согласно фиг. 14 во втором положении.
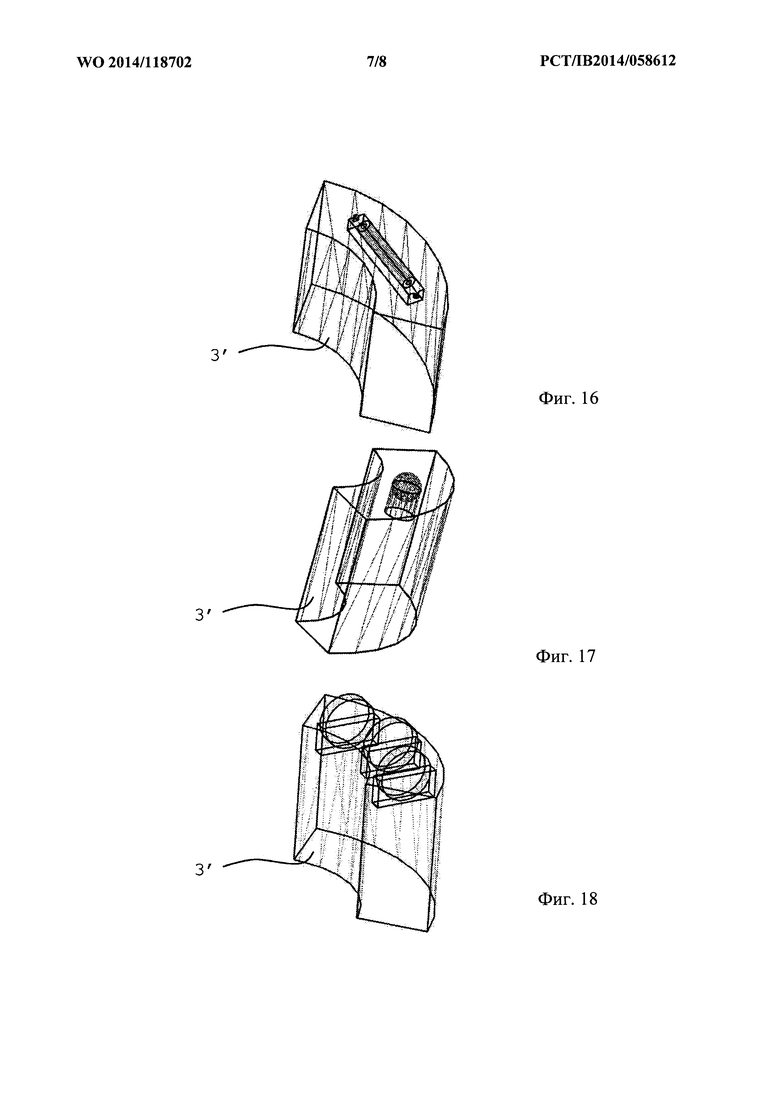
На фиг. 16 представлено устройство для уменьшения трения в виде ролика.
На фиг. 17 представлено устройство для уменьшения трения в виде шарика.
На фиг. 18 представлено устройство для уменьшения трения в виде нескольких колес.
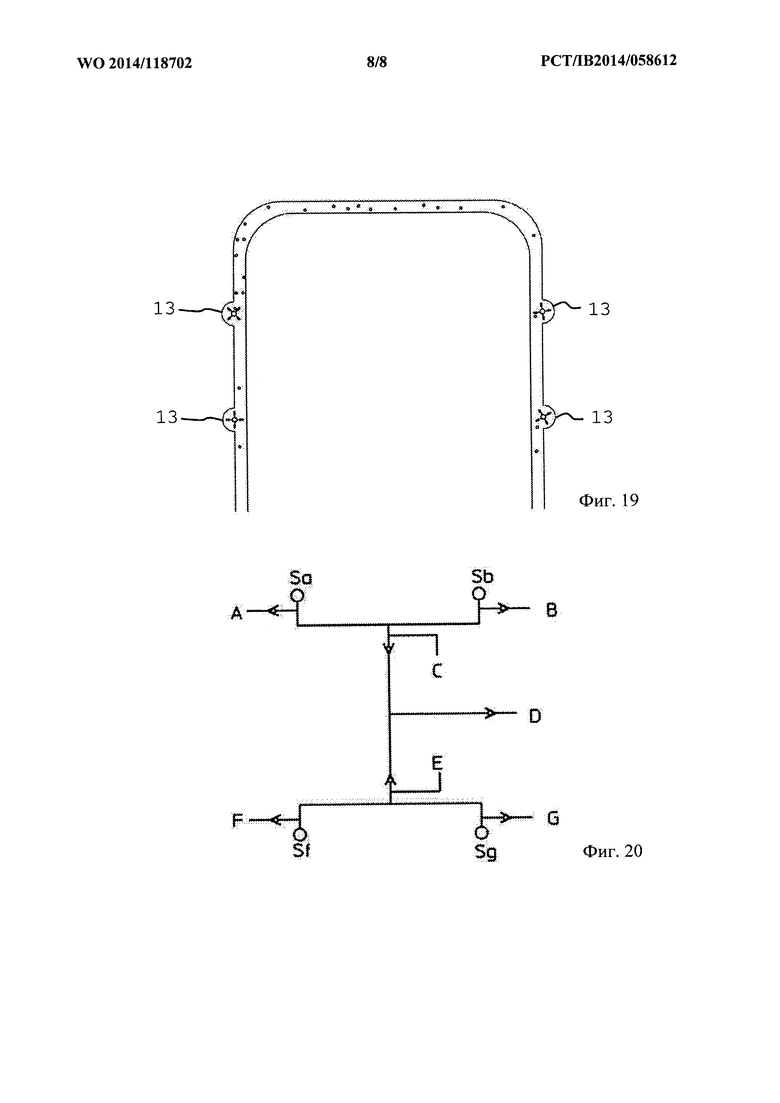
На фиг. 19 представлен схематический вид совместного жидкостного включения нескольких приводов.
На фиг. 20 представлен пример группового совместного жидкостного включения нескольких приводов.
На фиг. 1 показан вариант осуществления первого основного типа крепежного средства согласно изобретению. Продольная ось L проходит через крепежное средство в вертикальном направлении; она одновременно является и направлением задвигания. Крепежное тело 1 введено в крепежное основание 2, которое может представлять собою конструктивный элемент. Крепежное тело 1 содержит анкер 3, который состоит из нескольких частей (отдельные части 3'). В частности, анкер 3 выполнен с возможностью ввода в крепежное основание 2.
Анкер 3 пригоден для крепления с геометрическим и/или фрикционным замыканием крепежного средства в крепежном основании 2. Для этого он перемещается по меньшей мере в первое направление R1; существуют два таких первых направления R1, так как обе отдельные части 3' перемещаются радиально наружу. Для отсоединения анкера 3 отдельные части 3' перемещаются, соответственно, в противоположное первому направлению R1 второе направление R2.
Для этой цели анкер 3 соединен с приводом 4 с дистанционным управлением и перемещается ним по меньшей мере во второе направление R2.
Согласно варианту осуществления, который не показан, привод дополнен электрическими компонентами (например, жидкостным насосом с электроприводом, с помощью приводимого биметаллическим элементом или сплавом с эффектом памяти жидкостным цилиндром). Таким образом, дистанционное управление осуществляется простым образом с помощью включения и выключения электрического тока. Предпочтительно для этого применяют моторные (вращающиеся) приводы. Хотя электрический ток, в принципе, является легкодоступным, однако, он может при длительных простоях крепежного средства согласно изобретению послужить причиной возникновения проблем при использовании чисто электрического привода (коррозия). Наряду с этим в результате вырабатываемых миниатюрными электрическими приводами сил - в особенности, без дополнительных приводов - в некоторых случаях будет недостаточно для отсоединения прочно посаженного крепежного средства.
Согласно показанному на фиг. 1 варианту осуществления привод 4 расположен в крепежном средстве. Это означает, что крепежное средство содержит привод 4 в качестве интегрированных и расположенных внутри компонентов и, что привод 4 жестко соединен с крепежным средством, в частности, с крепежным телом 1.
Таким же образом, в показанном на фиг. 1 варианте осуществления анкер 3 содержит по меньшей мере две отдельные части 3' и, соответственно, первое направление R1, в котором перемещается каждая из этих отдельных частей 3', проходит в радиальном направлении от продольной оси L. Другими словами, состоящий из нескольких частей анкер 3 может временно увеличивать периметр крепежного средства в его продольном участке.
Согласно этому варианту осуществления для этой цели каждая отдельная часть 3' содержит проходящий вертикально продольной оси L выступ 5, который (согласно непоказанному варианту осуществления) может представлять собою также болт, который с поднутрением 6 крепежного основания 2 (согласно непоказанному варианту осуществления) может представлять собою отверстие, может взаимодействовать с геометрическим замыканием. Другими словами, анкер 3 обладает геометрическими признаками, которые в первом положении (на фиг. 1 показано закрепленное положение) взаимодействуют с геометрическим и/или фрикционным замыканием с крепежным основанием 2 и во втором положении (положение отсоединения на фиг. 2) не обладают этим взаимодействием, так что крепежное средство уже больше не закреплено в крепежном основании 2.
На фиг. 2 позиции с целью обзорности выпущены. Как очевидно, отдельные части 3' отодвинуты в направлении продольной оси L в такой мере, что крепежное тело 1 может выдвигаться из крепежного основания 2. Расположенный вверху на фигуре конструктивный элемент (без указания позиции) можно теперь снять с расположенного снизу, имеющего крепежное основание 2 конструктивного элемента.
Отдельные части 3' анкера 3 с наружной стороны выполнены преимущественно таким способом, что они имеют наклонную поверхность, которая наклонена таким образом, что направленный в сторону острия 11 крепежного средства конец отдельной части 3' в обоих положениях не выступает над «номинальным диаметром» N крепежного средства, в то время как другой конец отдельной части 3' не выступает над этим номинальным диаметром N только во втором положении. Таким образом, это наклонное положение может служить в качестве вспомогательного средства для введения, и при введении крепежного средства отдельные части 3' анкера 3 автоматически отжимаются в направлении продольной оси (второе направление) и для этого не требуется в обязательном порядке привод.
Кроме того, в описанном выше случае предпочтительным является, чтобы приводимый в действие с помощью текучей среды привод 4 находился в области между направленными на продольной оси L внутренними сторонами отдельными частями 3' анкера 3, и были образованы воздействующими на эти внутренние стороны сжимающими части (3') в радиальном направлении наружу (от продольной оси L) пружинами 7, которые механическим путем, например, с помощью тросового привода, цепей или зубчатых колес соединяются с цилиндром 8. Таким образом, привод полностью помещается внутри крепежного средства.
Для этого следует обратиться к фиг. 3 и фиг. 4, на которых эти фрагменты изображены более наглядно. По причине обзорности позиции там вообще не указываются или указываются только один раз.
Цилиндр 8 в свою очередь перемещается в проходящем в продольном осевом направлении, нагружаемом снаружи текучей средой напорном канале 9, так что цилиндр 8 при воздействии давления откидывается из закрепленного положения в положение отсоединения, в котором соединенные с ним пружины 7 перемещаются, соответственно, во второе направление R2. Следовательно, если на цилиндр 8 воздействует давление, он перемещается в напорном канале 9, и с помощью механических средств захватывает пружины 7, так что они разгружают отдельные части 3' анкера 3, и анкер 3 перемещается из закрепленного положения в положение отсоединения. Для этого целесообразным будет, если внутренние стороны анкера 3 соединятся с пружинами 7, чтобы их можно было захватывать или, если (согласно непоказанному варианту осуществления) будет присутствовать сила тяжести или другая восстанавливающая сила, под действием которой анкер 3 без воздействия пружин 7 перемещается в положение отсоединения.
Для непоказанного случая с приводимым в действие электроэнергией приводом целесообразным является, чтобы пружины 7 были выполнены биметаллическими, так что они сами образуют привод и деформируются при протекании тока, при этом они разгружают анкер 3, так что крепежное средство отсоединяется.
Для того, чтобы крепежное средство согласно изобретению отсоединялось не только исключительно посредством приводимого в действие с помощью текучей среды привода 4, но также приводилось в действие с помощью других, приводимых, в частности, ручным способом средств (в частности, отсоединялось), согласно одному из предпочтительных вариантов осуществления крепежное средство содержит дополнительно головку 10 с расположенным с возможностью доступа для инструмента профилем 10' захвата, который механическим способом соединен, например, с цилиндром 8 или, как это показано на первых четырех фигурах, с напорным каналом 9. Это может происходить, например, с помощью того, что цилиндр 8 в закрепленном положении расположен на расстоянии от конца головки крепежного средства, так что до него имеется доступ снаружи через напорный канал 9 и может передвигаться или вращаться (например, благодаря выполненному с помощью чеканки профиля 10' захвата). В показанном варианте осуществления профиль 10' захвата расположен в головке 10, которая переходит в напорный канал 9, так что его можно вращать снаружи с помощью традиционного инструмента (отвертки с крестовидным шлицем, не показано).
В результате этого при вращении и/или осевом перемещении профиля 10' захвата цилиндр 8 и напорный канал 9, и/или перемещаются в осевом направлении относительно друг друга, а соединенные с цилиндром 8 пружины 7 перемещаются, соответственно, во второе направление R2. В результате этого анкер 3 может перемещаться в положение отсоединения и можно отсоединять крепежное средство.
Разумеется, что аналогичная конструкция может использоваться и для приводимого в действие электроэнергией привода, не выходя за рамки изобретательской мысли.
Кроме того, будет целесообразно, чтобы крепежное средство содержало расположенное на переднем конце крепежного тела 1 острие 11 с пружиной 12 (см. фиг. 3), сила натяжения которой направлена против направления задвижки крепежного средства (на фигуре по направлению вверх). Как только анкер 3 переместится в положение отсоединения, сила натяжения пружины вытолкнет крепежное тело 1 из крепежного основания 2, так что, с одной стороны, можно очень легко производить оптический контроль за тем, соединено или освобождено крепежное средство и, с другой стороны, поддерживается ли дальнейшее автоматическое отсоединение.
Такое крепежное средство первого основного типа можно загонять также, например, молотком, в то время как при использовании для отсоединения кратковременного импульса жидкости происходит мгновенное выскакивание крепежного средства.
Следует подчеркнуть, что и этот вариант осуществления с приводимым в действие электроэнергией приводом также осуществим.
Само собою, разумеется, что изобретение может также быть сконструировано таким образом, что анкер при избыточном давлении находится в первом положении, а после сбрасывания этого избыточного давления может перемещаться во второе положение. Как только крепежное средство достигнет в достаточной степени герметичности, можно, таким образом, отказаться от использования напорного резервуара или компрессора, которые поставляют обычно необходимое для отсоединения избыточное давление. Можно также предусмотреть, чтобы регулирование движением анкера производилось с помощью пониженного давления вместо избыточного давления без отклонения от основополагающей идеи изобретения.
На фиг. 5 и на фиг. 6 показан описанный выше вариант осуществления первого основного типа, который содержит два конца анкера и, таким образом, крепежное тело 1. Один из этих концов закреплен в первом крепежном основании 2 внизу фигуры, при этом другой конец закреплен во втором крепежном основании 2 вверху фигуры. На фигуре слева крепежное средство находится в закрепленном положении и соединяет между собою оба крепежных основания 2. На фигуре справа крепежное средство изображено в положении отсоединения, и оба крепежных основания 2 расположены на расстоянии друг от друга. Это поддерживается также через обе пружины (позиции опущены). По общему жидкостному каналу (без указания позиций) напорные каналы 9 обеих сторон крепежного средства одновременно нагружаются текучей средой, что приводит к отсоединению крепежного средства с дистанционным управлением.
В варианте осуществления второго основного типа крепежного средства с приводимым в действие с помощью текучей среды приводом, который показан на фиг. 7 и фиг. 8, первое направление R1 представляет собою вращение вокруг продольной оси L, а анкер 3 представляет собою цилиндр с наружной резьбой, который может взаимодействовать с геометрическим замыканием с внутренней резьбой в крепежном основании 2. Другими словами, первое и второе направление R1 и R2 уже не проходят радиально, а кругообразно и, соответственно, винтообразно, и анкер 3 выполнен с участком резьбы традиционного винта или шпильки с резьбой по всей длине.
Привод 4 в таком случае расположен предпочтительно в корпусе 13, который находится на другой стороне охватывающего анкер 3 конца крепежного средства. В случае крепежного средства, напоминающего традиционный винт, привод 3 согласно этому расположен в (винтовой) головке 10 и таким образом, как и раньше, расположен внутри.
На фиг. 9 показан вид сверху/снаружи крепежного средства согласно этому варианту осуществления. Проходящая вертикально на фигуре широкая линия представляет собою приток и отток (без обозначения позиций) для приводимого в действие с помощью текучей среды привода, который расположен в головке 10 (привод не показан). Однако, можно распознать профиль 10' захвата, который в показанном варианте осуществления выполнен в форме крестообразного шлица. При его вращении привод приводится в действие вручную, так что крепежное средство дополнительно для дистанционного привода крепится/отсоединяется вручную.
Как показано на фиг. 10, на которой показаны фрагменты, и более наглядно вытекает, привод 4 выполнен предпочтительно с помощью ротора 14, лопасти которого расположены в круглой обтекаемой текучей средой полости 15 (см. фиг. 7 и фиг. 8), при этом ротор 14 соединен с возможностью вращения с анкером 3 (или с анкерами, см. фиг. 11). В результате вращения привода 4 анкер 3 вращается с наружной резьбой, при этом наружная резьба вращается и может заходить в крепежное основание 2 и выходить из него. Так как частота вращения ротора 14 с приводимым в действие с помощью текучей среды приводом может быть высокой, обеспечивается, соответственно, быстрое крепление и отсоединение.
Согласно модификации указанного выше варианта осуществления второго основного типа анкер 3 содержит полость 16 (см. фиг. 8) и перемещается в осевом направлении на размещаемой в этой полости 16 жестко соединенной с ротором 14 цапфе 17 с захватами 18 (см. фиг. 10). Захваты 18 передают вращение ротора 14 и цапфы 17 на анкер 3.
Для того, чтобы анкер 3 не смог сползать с цапфы 17 и, чтобы он мог передавать осевые силы, анкер 3 содержит предпочтительно на направленном на привод конце аксиальный стопорный элемент для защиты от падения цапфы 17. Это можно обеспечить, например, с помощью сужения диаметра в отверстии анкера 3 (не показано), который взаимодействует с уступом 17' на конце цапфы 17, который в таком случае не может пересечь анкер 3.
В случае крепежного средства, содержащего два конца анкера, корпус 13 для размещения привода 4 может располагаться также в средней части крепежного средства. Этот вариант осуществления показан на фиг. 11. Такое крепежное средство может предпочтительно соединять два расположенные друг против друга крепежные основания 2.
Согласно другому варианту осуществления, который показан на фиг. 12 и фиг. 13 второго основного типа крепежного средства согласно изобретению с вращающимся приводом, привод 4 расположен в корпусе 19, который находится в служащей в качестве опоры детали (соответственно, внизу фигуры без обозначения позиций). В соответствии с этим привод 4 не расположен в «головке» или тому подобное. Однако, он снова образован ротором 14, лопасти 14' которого расположены в круглой, омываемой текучей средой полости 15. Кроме того, ротор 14 содержит аксиальное резьбовое отверстие 20 для размещения анкера 3, при этом анкер 3 защищен от вращения и/или соединен с возможностью вращения с ротором 14 (не показано). Разумеется, что стопорный элемент и соединение не должны включаться одновременно, так как в противном случае анкер 3 уже не сможет больше перемещаться.
Такое конструктивное исполнение сравнимо с автоматически вращающейся в подшипнике гайкой. Если гайка вращается (ротор 14) и установленная в ней шпилька с резьбой по всей длине будет удерживаться (анкер 3) (защита от вращения), то в таком случае он перемещается в осевом направлении из ротора 14 или заходит в него в зависимости от направления вращения ротора 14. Если анкер 3 соединен с возможностью вращения с ротором 14, то в таком случае он вращается вместе с ним и может, следовательно, при вращении завинчиваться в сопряженную деталь (вверху на фигуре), которая, как правило, снабжена резьбовым отверстием для анкера 3. В зависимости от применения, фиксирование и соединение могут быть релевантными или оба описанные виды могут встречаться последовательно (защита от вращения до тех пор, пока анкер 3 войдет в зацепление с сопряженной деталью, затем соединится с ротором 14 для завинчивания в сопряженную деталь).
Фиксирование и соединение может производиться предпочтительно с помощью гидравлических или пневматических систем. Однако, это может происходить и с помощью согласования коэффициентов трения и частоты вращения.
Согласно другому сравнительному варианту осуществления, изображенному на фиг. 14 и фиг. 15, с уже описанным в начале первым основным типом и, в особенности, его анкером, приводимый в действие с помощью текучей среды привод 4 расположен вне крепежного средства и содержит по меньшей мере механические компоненты, которые расположены с возможностью перемещения в крепежном основании 2. Основное различие при этом заключается в приводе 4, который встроен не в крепежном теле, и, кроме прочего, содержит теперь расположенные в крепежном основании 2 компоненты. С помощью механических компонентов, как и в других вариантах осуществления, анкер 3 перемещается во второе направление R2, как это показано на фиг. 15, на которой опущены позиции.
Механические компоненты содержат предпочтительно втулку 21, пригодную для размещения переднего конца крепежного тела 1, которая перемещается в аксиальном направлении из первого положения (фиг. 14) во второе положение (фиг. 15), и с помощью которой анкер 3 перемещается во второе направление R2. Эта втулка 21 может, например, как это показано, быть выполнена в форме стакана и содержать сплошные или прерывистые (не показано) стенки. Стенки рассчитаны и расположены таким образом, что они при приведении в действие привода 4 оказывают воздействие на анкер 3, так что он перемещается из закрепленного положения в положение отсоединения. Таким образом, крепежное средство может с помощью (уже внешнего) жидкостного привода 4 отсоединяться от крепежного основания 2. Привод 4 сам встроен в крепежном основании 2.
Согласно следующему варианту осуществления, который является релевантным, в особенности, с точки зрения модификаций с не вращающимся анкером, и показан на фиг. 16-18, состоящий из нескольких частей анкер (3, 3') содержит в контактной поверхности (поверхностях) с крепежным основанием (не показано) устройство для уменьшения трения в виде частично выступающих из него роликов (фиг. 16), шариков (фиг. 17) и/или колес (фиг. 18). На фиг. 1 из соображений наглядности эти устройства для уменьшения трения находились бы на фигуре с направленной вверх стороны выступов 5 и контактная поверхность должна бы находиться между этой областью и поднутрением 6.
Цель этого устройства для уменьшения трения заключается в снижении трения сцепления и трения скольжения между анкером 3 и крепежным основанием 2 для перемещения анкера 3 без больших затрат сил в корпус крепежного средства. По этой причине это имеет особо важное преимущество, так как в противном случае - в особенности после длительного времени - может произойти заклинивание крепежного средства. Эта проблема известна в традиционных винтах и эффективным образом предотвращается с помощью данного устройства для уменьшения трения в сочетании с анкером 3. При использовании приводимого в действие электроэнергией привода снижение трения также целесообразно, так как такие приводы не могут, как правило, создавать большие силы.
И, наконец, изобретение относится к крепежной системе с несколькими крепежными средствами согласно указанным выше определениям, при этом их приводы соединены по текучей среде между собою, например, с помощью промежуточного включения клапанов и подвода избыточного и/или пониженного давления.
Это означает, что такая крепежная система обладает преимуществом, так как она позволяет производить массивно-параллельное соединение и, соответственно, отсоединение крепежных средств. Можно простым и быстрым образом производить подключение также и подгрупп, которые выбирают с помощью соответствующего подключения питающих трубопроводов и/или клапанов. Для этого не требуются никакие инструменты; с помощью кратковременного жидкостного импульса можно, таким образом, в течение короткого времени освободить, например, все днище, к которому сначала был привинчен нетканый материал, или прикрепить стеновые панели на стенах.
На фиг. 19 схематически показан жидкостный трубопровод. Он питает несколько корпусов 13 с роторами (позиции опущены) текучей средой под давлением, которая насыщена резиновыми шариками для повышения импульса. В связи с протеканием все роторы приводятся в действие одновременно, так что происходит перемещение соединенных с ними анкеров (не показаны). Таким образом, можно осуществлять массивно-параллельное включение крепежного средства (не показано).
На фиг. 20 показана схематическая схема соединений крепежной системы с жидкостным приводом. За счет соответствующего расположения клапанов A, В, С, D, Е, F и G образуются группы, которые позволяют производить соответствующее группированное управление схематически показанными крепежными средствами Sa, Sb, Sf и Sg. Таким образом, можно подавать находящуюся при избыточном или пониженном давлении текучую среду (не показано) всего лишь в один порт (в данном случае D) в крепежную систему без одновременного крепления или отсоединения всех крепежных средств.
При этом очевидно, что все клапаны должны управляться с помощью соответствующих средств, например, электрических или механических.
Разумеется, что логично допустить крепежную систему с приводимым в действие электроэнергией приводом.
Описанное выше изобретение решает, как показано, известные из уровня техники проблемы и предлагает крепежное средство с дистанционным управлением, которое может быстро и без использования инструмента осуществлять крепление/отсоединение, и которое можно сочетать с крепежной системой.
Перечень позиций
1 - крепежное тело;
2 - крепежное основание;
3 - анкер;
3' - отдельная часть;
4 - привод;
5 - выступ;
6 - поднутрение;
7 - пружины;
8 - цилиндр;
9 - напорный канал;
10 - головка;
10' - профиль захвата;
11 - острие;
12 - пружина;
13 - корпус;
14 - ротор;
14' - лопасти ротора;
15 - полость;
16 - полость;
17 - цапфа;
17' - уступ;
18 - захват;
19 - корпус;
20 - резьбовое отверстие;
21 - втулка;
L - продольная ось;
R1 - первое направление;
R2 - второе направление;
N - номинальный диаметр;
A-G - клапаны;
S - схематически показанное крепежное средство.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛИВНОЙ ФИЛЬТР | 2013 |
|
RU2615490C2 |
| ГИЛЬЗА ПРОТЕЗА | 2013 |
|
RU2675929C2 |
| КАНИСТРОВАЯ СИСТЕМА ФИЛЬТРАЦИИ СО СТОКОМ, ВЗАИМОДЕЙСТВУЮЩИМ С ФИЛЬТРУЮЩИМ ЭЛЕМЕНТОМ | 2011 |
|
RU2706054C2 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ | 2011 |
|
RU2538633C2 |
| СОЕДИНИТЕЛЬ ДЛЯ ПЕРЕНОСА ТЕКУЧЕЙ СРЕДЫ | 2014 |
|
RU2668110C2 |
| ОТВЕРТКА И ВИНТ ДЛЯ ХИРУРГИЧЕСКОГО ПРИМЕНЕНИЯ | 2017 |
|
RU2763816C2 |
| УСТРОЙСТВО СТОЯНОЧНОГО ТОРМОЗА ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2468942C2 |
| СИСТЕМА ДЛЯ ФИКСАЦИИ ШКВОРНЯ ПОЛУПРИЦЕПА НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2016 |
|
RU2729133C2 |
| БЛОК ПРИВОДА КОЛЕСА ДЛЯ ПРИСОЕДИНЕНИЯ К ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2598871C1 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ С УПРАВЛЕНИЕМ ПРЕОБРАЗОВАТЕЛЕМ ПО ОБРАТНОЙ СВЯЗИ И СПОСОБ ЕГО ФУНКЦИОНИРОВАНИЯ | 2021 |
|
RU2833155C1 |
Изобретение относится к соединительной технике и направлено на сокращение времени отсоединения крепежного средства. Крепежное средство с дистанционным управлением для разъемного соединения конструктивных элементов с продольной осью и с крепежным телом для введения в крепежное основание. Крепежное тело содержит анкер, вводимый в крепежное основание, который перемещается по меньшей мере в первое направление с целью закрепления с геометрическим и/или фрикционным замыканием крепежного средства в крепежном основании и во второе направление, противоположное первому направлению, с целью его отсоединения. Анкер соединен с приводом с дистанционным управлением, предусмотренным для работы с помощью текучей среды, который размещен в крепежном средстве, и перемещается во второе направление, и при этом анкер содержит по меньшей мере две отдельные части и проходит в направлении, радиальном первому направлению, в которое перемещается каждая из этих отдельных частей, от продольной оси. Каждая из этих отдельных частей содержит выступ, проходящий вертикально продольной оси, который выполнен с возможностью взаимодействия с обеспечением геометрического замыкания с поднутрением крепежного основания. 3 н. и 7 з.п. ф-лы, 20 ил.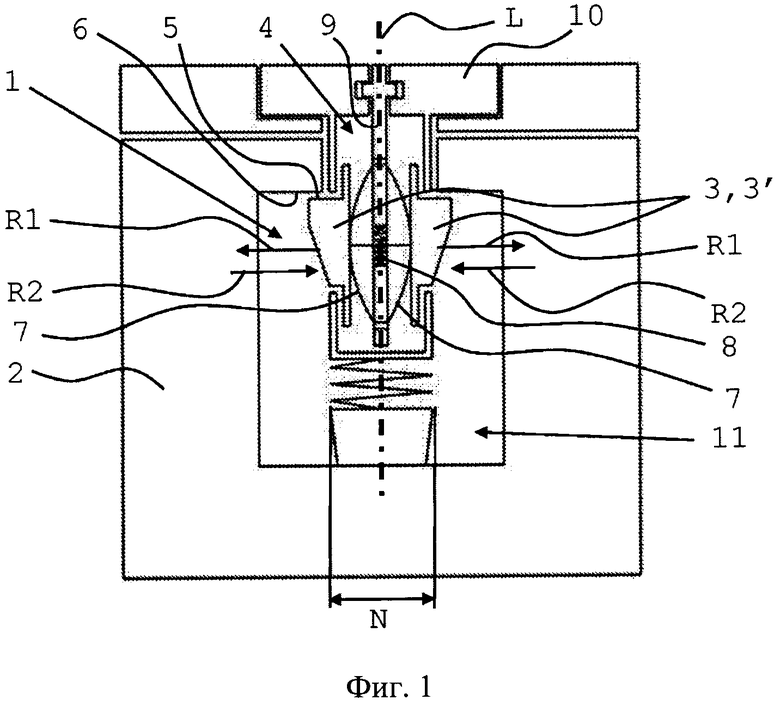
1. Крепежное средство с дистанционным управлением для разъемного соединения конструктивных элементов с продольной осью (L) и по меньшей мере с одним крепежным телом (1) для введения в крепежное основание (2), отличающееся тем, что крепежное тело (1) содержит анкер (3), вводимый в крепежное основание (2), и при этом анкер (3) перемещается по меньшей мере в первое направление (R1) с целью закрепления с геометрическим и/или фрикционным замыканием крепежного средства в крепежном основании (2) и, соответственно, во второе направление (R2), противоположное такому первому направлению (R1), с целью его отсоединения, и при этом анкер (3) соединен с приводом (4) с дистанционным управлением, предусмотренным для работы с помощью текучей среды, который размещен в крепежном средстве, и перемещается по меньшей мере во второе направление (R2), и при этом анкер (3) содержит по меньшей мере две отдельные части (3') и, соответственно, проходит в направлении, радиальном первому направлению (R1), в которое перемещается каждая из этих отдельных частей (3'), от продольной оси (L), и при этом каждая из этих отдельных частей (3') содержит выступ (5), проходящий вертикально продольной оси (L), который выполнен с возможностью взаимодействия с обеспечением геометрического замыкания с поднутрением (6) крепежного основания (2).
2. Крепежное средство по п. 1, отличающееся тем, что привод (4) расположен в области между направленными к продольной оси (L) внутренними сторонами отдельных частей (3') анкера (3) и выполнен с помощью воздействующих на эти внутренние стороны, сжимающих отдельные части (3') в радиальном направлении наружу пружин (7), которые механическим способом соединены с цилиндром (8), расположенным с возможностью перемещения в проходящем в продольно-аксиальном направлении напорном канале (9), который снабжается извне текучей средой, так что цилиндр (8) при воздействии давления поворачивается из закрепленного положения в положение отсоединения, в котором соединенные с ним пружины (7) перемещаются, соответственно, во второе направление (R2).
3. Крепежное средство по п. 2, отличающееся тем, что дополнительно содержит головку (10) с расположенным с возможностью доступа для инструмента профилем (10') захвата, который механическим способом соединен с напорным каналом (9) или цилиндром (8), так что при вращении и/или осевом перемещении профиля захвата цилиндр (8) и напорный канал (9) вращаются относительно друг друга и/или перемещаются относительно друг друга в осевом направлении, и соединенные с цилиндром (8) пружины (7) перемещаются, соответственно, во второе направление (R2).
4. Крепежное средство по п. 1, отличающееся тем, что дополнительно содержит расположенное на переднем конце крепежного тела (1) острие (11) с пружиной (12), усилие пружины которого направлено против направления введения крепежного средства.
5. Крепежное средство по одному из пп. 1-4, отличающееся тем, что его анкер (3, 3') в поверхности (поверхностях) контакта с крепежным основанием (2) содержит устройство для уменьшения трения в форме частично выступающих из него роликов, шариков и/или колес.
6. Крепежное средство с дистанционным управлением для разъемного соединения конструктивных элементов с продольной осью (L) и по меньшей мере с одним крепежным телом (1) для введения в крепежное основание (2), отличающееся тем, что крепежное тело (1) содержит анкер (3), вводимый в крепежное основание (2), и при этом анкер (3) перемещается по меньшей мере в первое направление (R1) с целью закрепления с геометрическим и/или фрикционным замыканием крепежного средства в крепежном основании (2), и, соответственно, во второе направление (R2), противоположное такому первому направлению (R1), с целью его отсоединения, и при этом анкер (3) соединен с приводом (4) с дистанционным управлением, предусмотренным для работы с помощью текучей среды, который размещен в крепежном средстве, и перемещается по меньшей мере во второе направление (R2), и при этом первое направление (R1) представляет собою вращение вокруг продольной оси (L) и анкер (3) представляет собою цилиндр с наружной резьбой, выполненный с возможностью взаимодействия с обеспечением геометрического замыкания с внутренней резьбой в крепежном основании (2).
7. Крепежное средство по п. 6, отличающееся тем, что привод (4) размещен в корпусе (13), который находится на другой стороне охватывающего анкер (2) конца крепежного средства и образован ротором (14), лопасти (14') которого размещены в круглой омываемой текучей средой полости (15), при этом ротор (14) соединен с возможностью вращения с анкером (3).
8. Крепежное средство по п. 7, отличающееся тем, что анкер (3) содержит полость (16) и расположен с возможностью осевого перемещения на цапфе (17) с захватами (18), размещенной в этой полости (16), жестко соединенной с ротором (14).
9. Крепежное средство по п. 6, отличающееся тем, что привод (4) расположен в корпусе (19), который находится в конструктивном элементе, служащем в качестве опоры, и образован ротором (14), лопасти (14') которого размещены в круглой омываемой текучей средой полости (15), и содержит аксиальное резьбовое отверстие (20) для установки анкера (3), при этом анкер (3) зафиксирован во избежание вращения и/или соединен с ротором (14) с возможностью вращения.
10. Крепежная система с несколькими крепежными средствами по одному из пп. 1-9, отличающаяся тем, что ее приводы (4) соединены по текучей среде друг с другом и находятся под воздействием избыточного и/или пониженного давления.
| DE 4214206 A1, 04.11.1993 | |||
| US 2006133912 A1, 22.06.2006 | |||
| DE 10313170 B3, 26.08.2004 | |||
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ С ОПОРНОЙ ИЛИ НЕСУЩЕЙ ДЕТАЛЬЮ ЗАКРЕПЛЯЕМОЙ НА НЕЙ ДЕТАЛИ | 2004 |
|
RU2358165C2 |

