ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству и способу для профилирования глубины поверхности целевого объекта.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Методы генерации 3D цифровых данных являются активной областью исследований, например, для обеспечения управления жестами и записи 3D-сцен. Есть три основных метода определения дальности, которыми являются интерферометрия, триангуляция и времяпролетное формирование изображения. Последний метод может быть использован для больших диапазонов глубин, в то время как триангуляция лучше подходит для близких дальностей. Для достижения высокого разрешения могут быть использованы способы на основе интерферометрии. Триангуляция является известным методом, в котором используются активная подсветка и устройство записи изображения. Методы активной подсветки используют конкретный световой шаблон, который проецируется на целевой объект. Затем искажения обнаруженного светового шаблона могут быть использованы для восстановления профиля глубины.
Бесконтактные способы профилирования глубины поверхностей, например кожи, могут потребоваться для обнаружения и количественной оценки качества поверхности, например морщин и тонких линий. Бесконтактный способ для измерения ближнего диапазона может потребоваться в том случае, когда контакт между устройством профилирования глубины и поверхностью может деформировать профиль глубины поверхности, подлежащей сканированию, и привести к ложному измерению. В медицинской области профилирование глубины может быть использовано для сканирования родимых пятен (меланоцитарного невуса) в домашней обстановке и отслеживания роста родимого пятна во времени. В другой области возможно сканировать структуру рельефа поверхности листьев. Профилирование глубины может представлять интерес по отношению к особенностям размерами порядка микрометров или больше.
Известны лазерные строчные сканеры, которые профилируют 3D объекты в технологических линиях в промышленности, причем лазерная строка отображается с помощью оптического дифракционного элемента и перемещается по поверхности целевого объекта. Однако они требуют точного движения и/или, возможно, отслеживания либо лазерной линии либо объекта, чтобы получить 3D данные исследуемого объекта. Шум в виде спеклов от лазера является ограничивающим фактором.
Другой способ заключается в использовании устройства проектора света, но они относительно велики и дороги. Кроме того, устройства проекторов обычно используются для больших объектов, таких как полные лица, с более низким разрешением по глубине в нескольких миллиметров.
Еще один способ получения конкретного, часто сложного, светового шаблона состоит в использовании множества дифракционных оптических элементов. Однако проектирование дифракционного элемента не является простой задачей. Кроме того, дальнейшая миниатюризация повышает требования к конструкции дифракционного оптического элемента, соответственно требуя меньшую структуру. Существует предел размера наименьшей структуры, которая может быть изготовлена с использованием эффективных по затратам средств в прозрачном стекле или пластиковой пластине. Можно сослаться на US 2011/013006 A1; US 2011/040192 А1 и US 2009/118720.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение обеспечивает портативное устройство для профилирования глубины поверхности целевого объекта, при этом устройство содержит первый источник света, содержащий двумерную матрицу лазеров, оптическое устройство для проецирования двумерного многострочного шаблона подсветки на участок поверхности целевого объекта, устройство захвата изображения, выполненное с возможностью захвата изображения двумерного шаблона подсветки, проецируемого на участок поверхности целевого объекта, процессор, сконфигурированный для обработки захваченного изображения для восстановления профиля глубины двумерного участка поверхности целевого объекта из изображения, захваченного устройством захвата изображений, и средство для определения расстояния между устройством и поверхностью целевого объекта, причем двумерная матрица содержит множество строк, причем по меньшей мере одна строка смещена вбок по отношению к смежной строке.
Настоящее изобретение может предусматривать, что двумерная матрица лазеров содержит по меньшей мере два лазера, имеющих различные формы.
Настоящее изобретение может предусматривать, что двумерная матрица выполнена с возможностью переключения между режимом однородной подсветки и режимом структурированной подсветки.
Настоящее изобретение может предусматривать, что средство для определения расстояния между двумерной матрицей и поверхностью целевого объекта содержит второй источник света, наклоненный под предопределенным углом относительно первого источника света, причем второй источник света выполнен с возможностью проецировать второй шаблон подсветки на поверхность целевого объекта, и устройство захвата изображения выполнено с возможностью захвата изображения второго шаблона подсветки, и при этом процессор дополнительно выполнен с возможностью обработки захваченного изображения второго шаблона подсветки и определения расстояния между первым активным источником света и поверхностью целевого объекта на основе предопределенного угла и захваченного изображения второго шаблона подсветки.
Настоящее изобретение может предусматривать, что двумерная матрица лазеров содержит лазеры поверхностного излучения с вертикальным объемным резонатором.
Настоящее изобретение обеспечивает способ профилирования глубины поверхности целевого объекта с использованием портативного устройства, при этом способ содержит проецирование двумерного многострочного шаблона подсветки от первого источника света, содержащего двумерную матрицу лазеров, на участок поверхности целевого объекта, захват изображения шаблона подсветки, обработку захваченного изображения для восстановления профиля глубины участка поверхности целевого объекта из изображения, захваченного устройством захвата изображения, и определение расстояния между портативным устройством и поверхностью целевого объекта, причем двумерная матрица содержит множество строк, причем по меньшей мере одна строка смещена вбок по отношению к смежной строке.
Настоящее изобретение может предусматривать переключение двумерной матрицы между режимом однородной подсветки и режимом структурированной подсветки.
Настоящее изобретение может предусматривать, что определение расстояния между двумерной матрицей и поверхностью целевого объекта содержит направление второго источника света к целевому объекту, причем второй источник света ориентирован под предопределенным углом к первому источнику света, проецирование от второго источника света второго шаблона подсветки на поверхность целевого объекта, захват изображения второго шаблона подсветки, обработку захваченного изображения второго шаблона подсветки и определение расстояния между первым активным источником света и поверхностью целевого объекта на основе предопределенного угла и захваченного изображения второго шаблона подсветки.
Настоящее изобретение может обеспечивать считываемый компьютером носитель данных, выполненный с возможностью хранения инструкций компьютерной программы, которые при исполнении процессором выполняют способ, обеспечиваемый изобретением.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для того чтобы настоящее изобретение могло быть полностью понято, его варианты осуществления будут описаны только в качестве примера со ссылкой на прилагаемые чертежи, на которых представлено следующее:
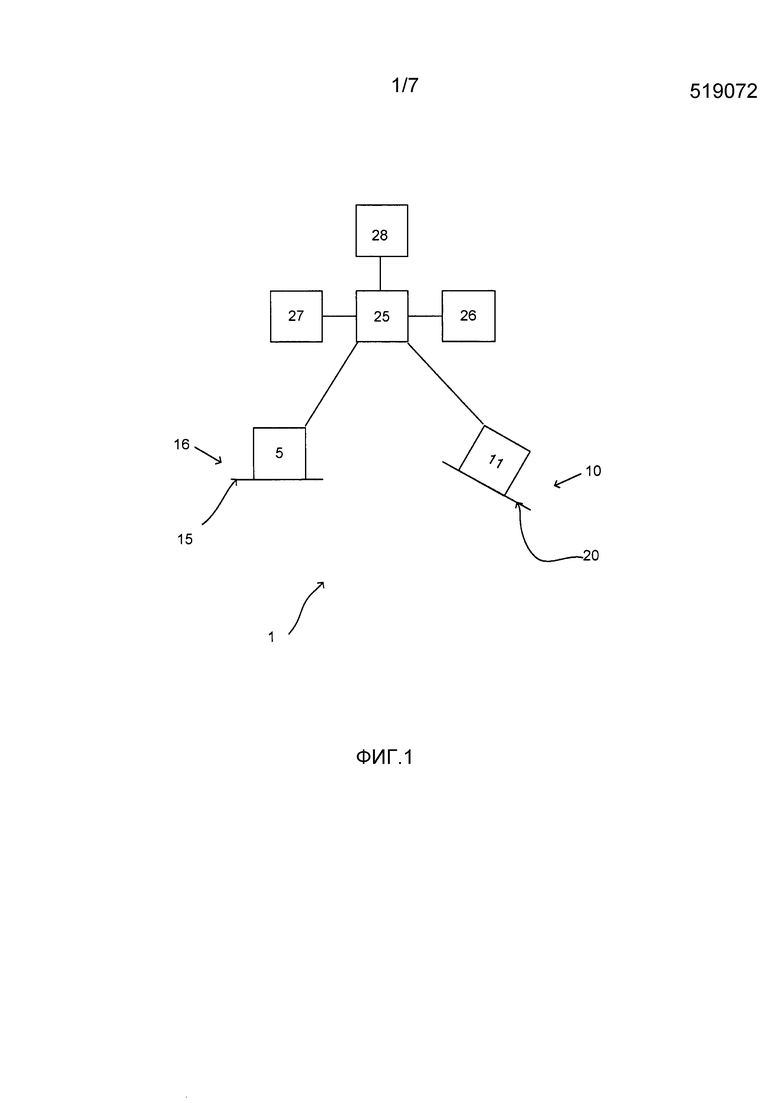
Фиг. 1 - схематичное изображение устройства профилирования глубины в соответствии с вариантом осуществления настоящего изобретения;
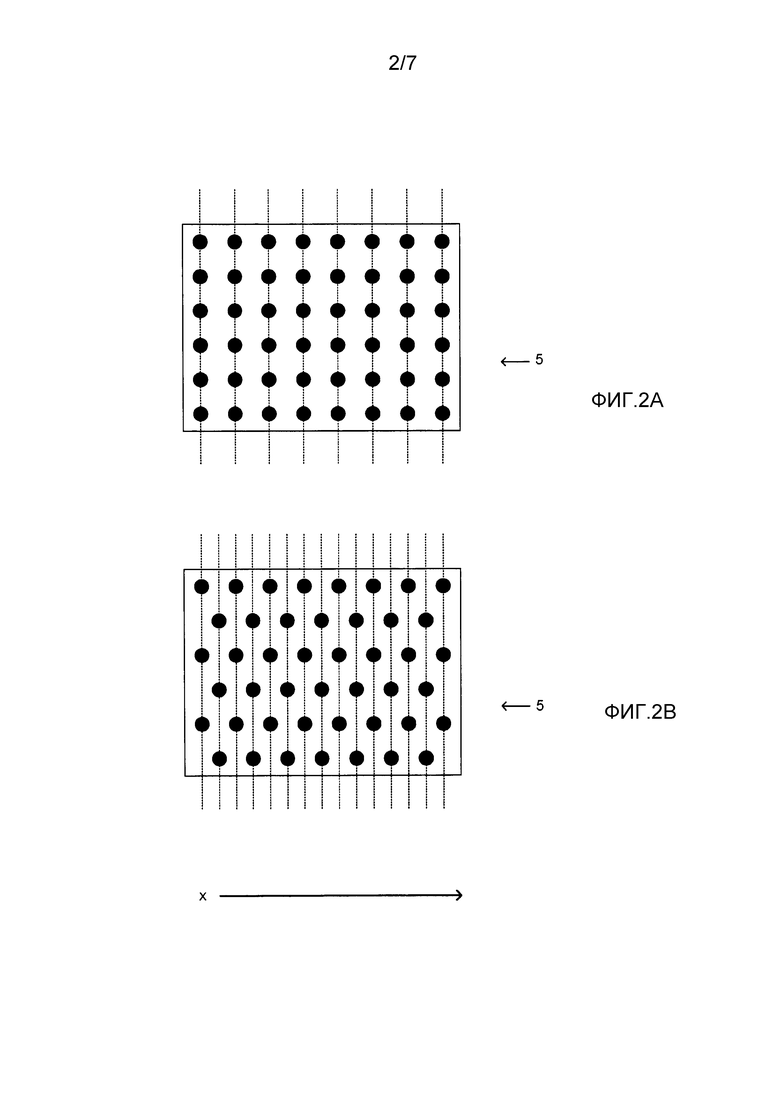
Фиг. 2А и 2В - виды в плане лазерной матрицы в соответствии с соответствующими вариантами осуществления настоящего изобретения;
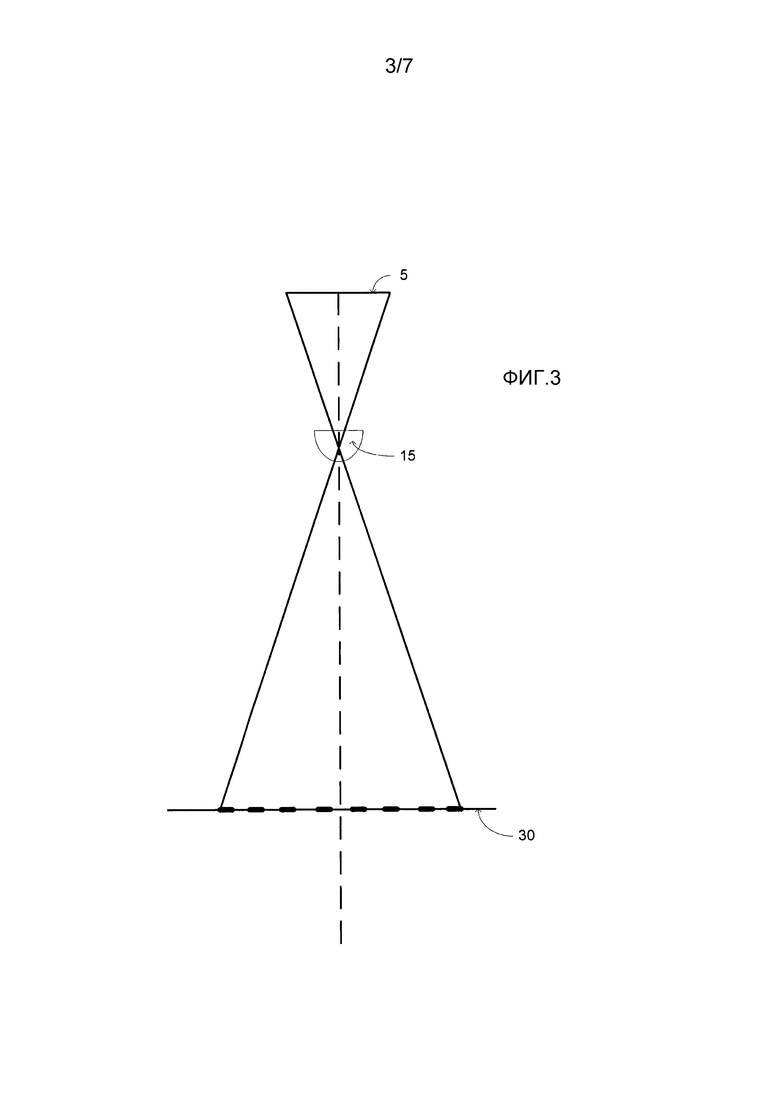
Фиг. 3 - диаграмма вида сбоку, показывающая вариант осуществления настоящего изобретения;
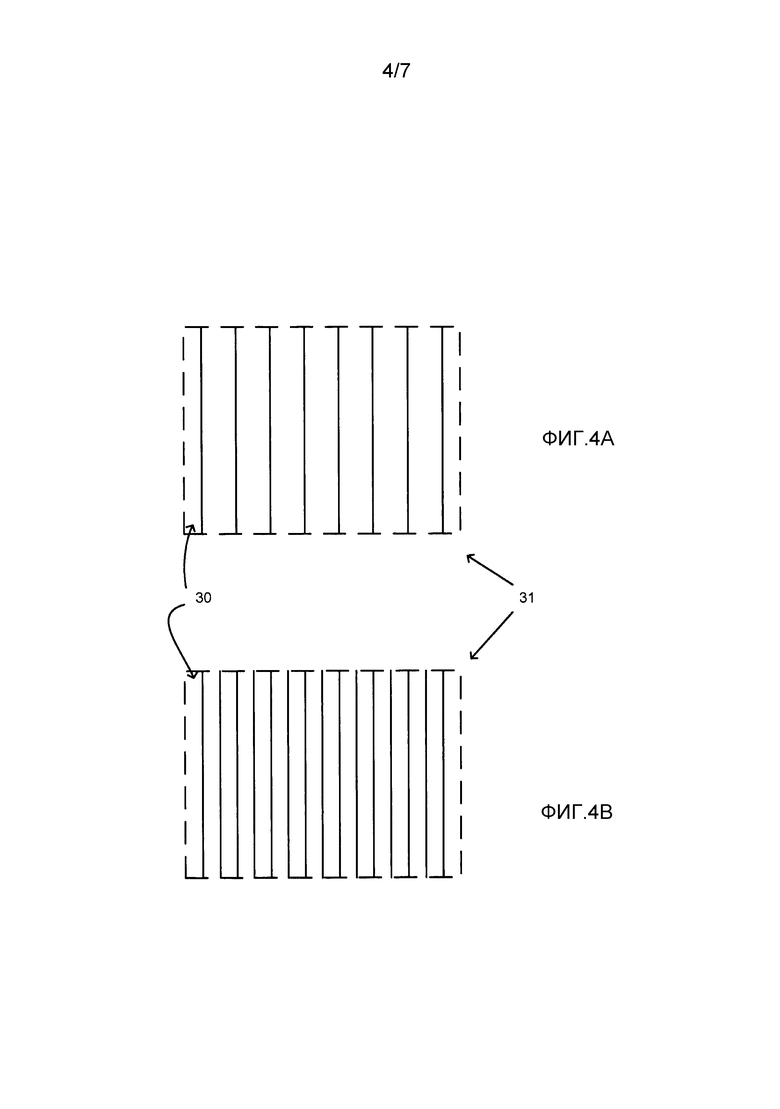
Фиг. 4A и 4B - виды в плане шаблонов подсветки в соответствии с соответствующими вариантами осуществления настоящего изобретения;
Фиг. 5 - схема варианта осуществления настоящего изобретения;
Фиг. 6 - схема варианта осуществления настоящего изобретения; и
Фиг. 7 - вид в плане кристалла, поддерживающего лазерную матрицу в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг. 1 показано устройство 1 профилирования глубины, содержащее двумерную лазерную матрицу 5, устройство 10 захвата изображения, такое как СCD (ПЗС)- или CMOS (КМОП)-камера, и первую линзу 15, связанную с лазерной матрицей 5. Устройство 10 захвата изображения может содержать матрицу захвата изображения и вторую линзу 20, чтобы сфокусировать изображение, захваченное устройством 10 захвата изображения. Устройство 1 профилирования глубины может дополнительно содержать процессор 25, чтобы управлять устройством 1 профилирования глубины и обрабатывать изображения, захваченные устройством 10 захвата изображения. Устройство 1 профилирования глубины может дополнительно содержать память 26 для хранения программного обеспечения, используемого процессором, чтобы управлять устройством 1 профилирования глубины и обрабатывать захваченные изображения. Устройство 1 профилирования глубины может дополнительно содержать источник 27 питания, например батарею или подключение к сети, и может содержать пользовательский интерфейс 28, имеющий блок вывода, например экран дисплея, и/или блок ввода, такой как клавиатура.
Фиг. 2A и 2B показывают лазерную матрицу 5 на виде в плане в соответствии с двумя возможными вариантами осуществления.
На фиг. 2А показана прямоугольная лазерная матрица 5, где каждый лазер (1-й, 2-й, 3-й и т.д.) на конкретной строке лазерной матрицы 5 имеет ту же координату оси х, как соответствующий лазер (1-й, 2-й, 3-й и т.д.) на предыдущих и следующих строках, где ось х является направлением сроки, как показано стрелкой внизу фиг. 2B.
На фиг.2В показана лазерная матрица 5, где последовательные строки смещены на определенное расстоянии вдоль оси х по сравнению с предыдущей строкой.
Лазерная матрица 5 может быть матрицей лазеров поверхностного излучения с вертикальным объемным резонатором (далее VCSEL). Использование VCSEL в лазерной матрице 5 является предпочтительным вследствие их высокой эффективности, низкого порогового тока и высоких значений ширины полосы модуляции. Кроме того, использование матрицы VCSEL имеет выгоды по стоимости благодаря вертикальному излучению лазеров, что обеспечивает возможность простой обработки и тестирования на уровне (полупроводниковой) пластины, а также интеграции оптики на уровне пластины. Компоновкой множества VCSEL в матрице, такой как лазерная матрица 5, можно управлять посредством одного этапа литографии в процессе производства, что допускает высокую свободу выбора в отношении формы, размера и плотности на участке поверхности матрицы.
Лазерная матрица 5 может иметь площадь примерно 1 квадратный миллиметр (в дальнейшем, кв.мм) или меньше в предпочтительных вариантах осуществления. Использование лазерной матрицы является предпочтительным из-за малых размеров, которые могут быть достигнуты, что снижает стоимость изготовления. Кроме того, использование цилиндрической линзы для отображения матрицы в одном измерении (т.е. в строках) является более простой конфигурацией, чем использование более сложных оптических устройств.
Лазерная матрица 5 может содержать от 5 до 50 строк, каждая строка содержит от 10 до 50 лазеров. Последовательные строки могут быть смещены в направлении х по отношению к предыдущей строке, по существу, как показано на фиг.2В.
Каждый из лазеров в лазерной матрице 5 может иметь диаметр от примерно 1 микрометра до примерно 25 микрометров (в дальнейшем микрон) и может быть отделен примерно 25 микронами. Например, может быть использована матрица, содержащая 18 строк, причем каждая строка содержит 25 лазеров, каждый диаметром примерно 5 микрон и с расстоянием приблизительно 25 микрон между каждым лазером. Как показано на фиг.2В, каждая последующая строка может быть смещена в направлении х на половину расстояния между каждым лазером. В приведенном выше примере сдвиг может быть приблизительно равен 12,5 микрон. Таким образом, положение в направлении х последовательных лазеров (т.е. 1-го, 2-го, 3-го и т.д.) в строке соответствует положению в направлении х последовательных лазеров в чередующихся строках.
Первая линза 15, как, показано на фиг. 1, может быть цилиндрической линзой, которая размещена перед матрицей 5. Цилиндрические линзы могут быть использованы, чтобы фокусировать свет, проходящий через них, в линию. Первая линза 15 может быть плоско-выпуклой или выпукло-выпуклой, хотя линза Френеля или одиночный дифракционный оптический элемент может быть использован вместо этого. Лазерная матрица 5 и первая линза 15 образуют вместе лазерный проектор 16.
Фиг. 3 показывает лазерную матрицу 5, первую линзу 15 и целевой объект 30, имеющий двумерный шаблон 31 подсветки, проецируемый на него, в соответствии с одним вариантом осуществления. В этом варианте осуществления первая линза 15 является цилиндрической линзой и двумерный шаблон 31 подсветки представляет собой многострочный шаблон. Число проецируемых линий зависит от лазерной матрицы 5.
Например, прямоугольная матрица такая, как показанная на фиг.2, будет проецировать восемь линий, равных количеству лазеров в каждой строке. Матрица такая, как показанная на фиг.2В, будет генерировать 15 линий 31. В описанном выше примере, где имеется 25 лазеров в строке и каждая последующая строка смещена в направлении х на расстояние, равное половине интервала между лазерами (аналогично конфигурации, показанной на фиг. 2В), 50 линий будут проецироваться на поверхность целевого объекта 30.
Варианты осуществления настоящего изобретения могут иметь последовательные строки лазеров, сдвинутых в направлении х по отношению к предыдущей строке на переменную величину. Поэтому каждый лазер в лазерной матрице 5 может иметь уникальную позицию в направлении оси х, тем самым увеличивая количество лазерных линий, проецируемых на поверхность целевого объекта 30, до числа, равного числу лазеров в лазерной матрице 5.
Фиг. 4А показывает шаблон 31 подсветки, полученный от лазерной матрицы 5, показанной на фиг. 2А, и фиг. 2В показывает шаблон 31 подсветки, полученный от лазерной матрицы 5, показанной на фиг.2В, на виде в плане при использовании цилиндрической первой линзы 15.
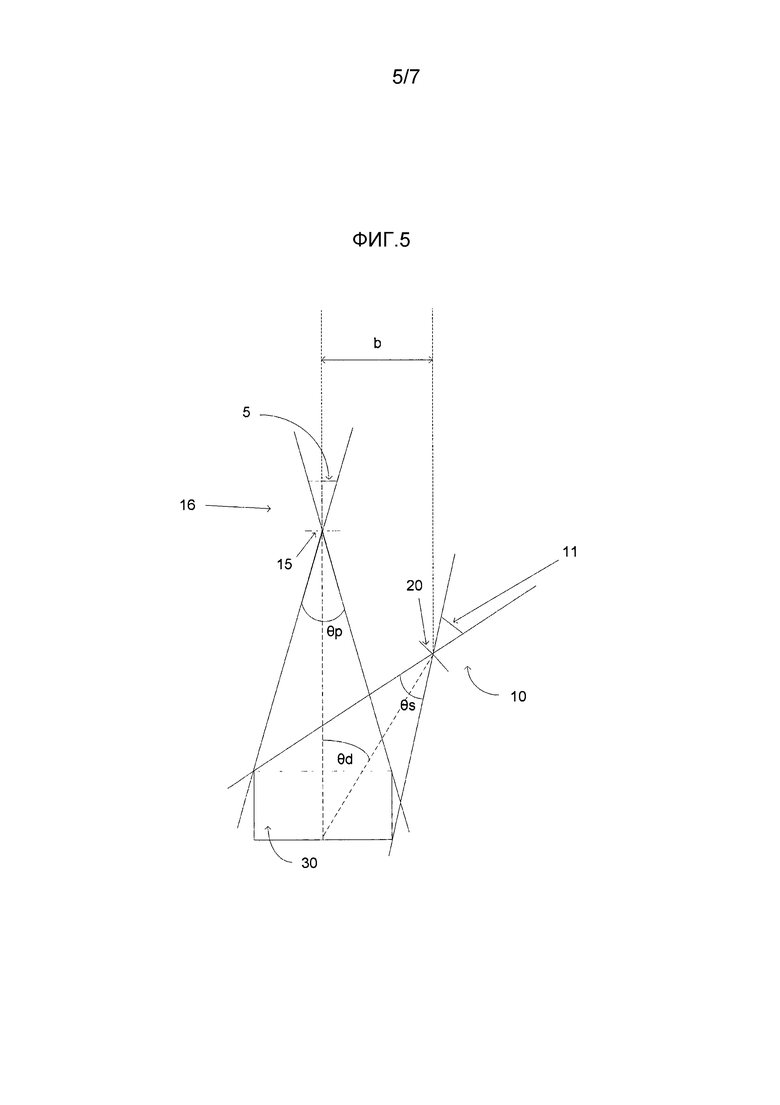
Фиг. 5 представляет диаграмму, показывающую лазерный проектор 16 и устройство 10 захвата изображения, выполненные с возможностью профилирования целевого объекта 30. Устройство 10 захвата изображения ориентировано под углом θd относительно лазерного проектора 16. Лазерный проектор 16 имеет угол раскрыва θр, и устройство 10 захвата изображения имеет поле зрения θs.
Первая линза 15 может иметь фокусное расстояние порядка нескольких миллиметров, и лазерный проектор 16 может иметь угол раскрыва θр между примерно 5 и примерно 45 градусами.
Лазерная матрица 5 может быть расположена по отношению к первой линзе 15 так, что она находится в фокусе или не в фокусе. Если лазерная матрица 5 находится на расстоянии от первой линзы 15, равном фокусному расстоянию, то лазерная матрица 5 отображается в бесконечности и имеет максимальную глубину фокуса.
В вариантах осуществления настоящего изобретения первая линза 15 может иметь фокусное расстояние 3 мм и лазерная матрица 5 может быть расположена на расстоянии 3,5 мм от первой линзы 15. Изображение лазерной матрицы 5, таким образом, создается на расстоянии 21 мм от лазерной матрицы 5, причем изображение увеличено с коэффициентом 6. Это приводит к площади подсветки порядка 6×6 мм. В этом варианте осуществления изобретения лазерный проектор 16 имеет угол раскрыва θр приблизительно 17 градусов. Угол раскрыва θр может быть увеличен путем использования первой линзы 15, имеющей более короткое фокусное расстояние.
При использовании двумерный шаблон подсветки, содержащий множество линий, может проецироваться на поверхность целевого объекта 30 лазерным проектором 16, как описано выше. Возникает диффузное рассеяние или отражение шаблона подсветки, и шаблон подсветки на поверхности целевого объекта 30 захватывается устройством 10 захвата изображения.
Устройство 10 захвата изображения выполнено так, что оно имеет базовое расстояние b, как показано на фиг. 4, составляющее от примерно 5 мм до примерно 50 мм. В некоторых вариантах осуществления настоящего изобретения угол θd может составлять от примерно 25 до примерно 45 градусов. Однако угол θd зависит от диапазона глубины и участка поверхности целевого объекта 30.
Устройство 10 захвата изображения захватывает и записывает изображение поверхности целевого объекта 30 и двумерный шаблон подсветки, проецируемый на нем лазерным проектором 16. Шаблон подсветки искажается профилем глубины поверхности целевого объекта 30. Процессор 25 с использованием программного обеспечения, сохраненного в памяти 26, восстанавливает профиль глубины поверхности целевого объекта 30, на которую проецировался шаблон подсветки. Соответствующее программное обеспечение восстановления профиля глубины должно быть хорошо известно для специалистов в данной области техники. Информация профиля глубины может быть выведена через пользовательский интерфейс 28.
Предпочтительно глубина двумерного участка поверхности может быть профилирована без качания шаблона подсветки по целевому объекту 30. Различные изображения поверхности целевого объекта 30, захваченные устройством 10 захвата изображения, могут быть объединены для получения профиля глубины большой площади поверхности, так как программное обеспечение сконфигурировано для распознавания особенностей поверхности, которые являются общими для нескольких захваченных изображений. Таким образом, нет необходимости отслеживать движение устройства 1 при объединении нескольких изображений.
В вариантах осуществления изобретения, описанных выше, шаблон подсветки, проецируемый на поверхность целевого объекта 30, содержит множество линий. Однако в альтернативных вариантах осуществления настоящего изобретения шаблон подсветки может иметь различную структуру. Например, различные формы могут проецироваться на поверхность целевого объекта 30.
В предпочтительных вариантах осуществления настоящего изобретения определяется расстояние между лазерной матрицей 5 и поверхностью целевого объекта 30. Определение расстояния между лазерной матрицей 5 и поверхностью целевого объекта 30 позволяет вычислять коэффициент увеличения шаблона подсветки и позволяет устройству 1 работать в нестатическом или портативном режиме.
Расстояние между лазерной матрицей 5 и поверхностью целевого объекта 30 может быть вычислено с использованием триангуляции шаблона подсветки, проецируемого на поверхность целевого объекта 30. Триангуляция, использующая проецируемый шаблон, представляет собой традиционный способ, который знаком специалисту в данной области техники. Альтернативно может быть использован времяпролетный способ, в котором лазерный импульс проецируется на поверхность целевого объекта 30, и измеряется время, необходимое для детектирования рассеянного или отраженного лазерного света. Расстояние может быть вычислено затем способом, известным специалистам в данной области. Расстояние между лазерной матрицей 5 и поверхностью целевого объекта 30 может также быть вычислено с использованием известных методов на основе интерферометрии, что должно быть очевидно специалистам в данной области.
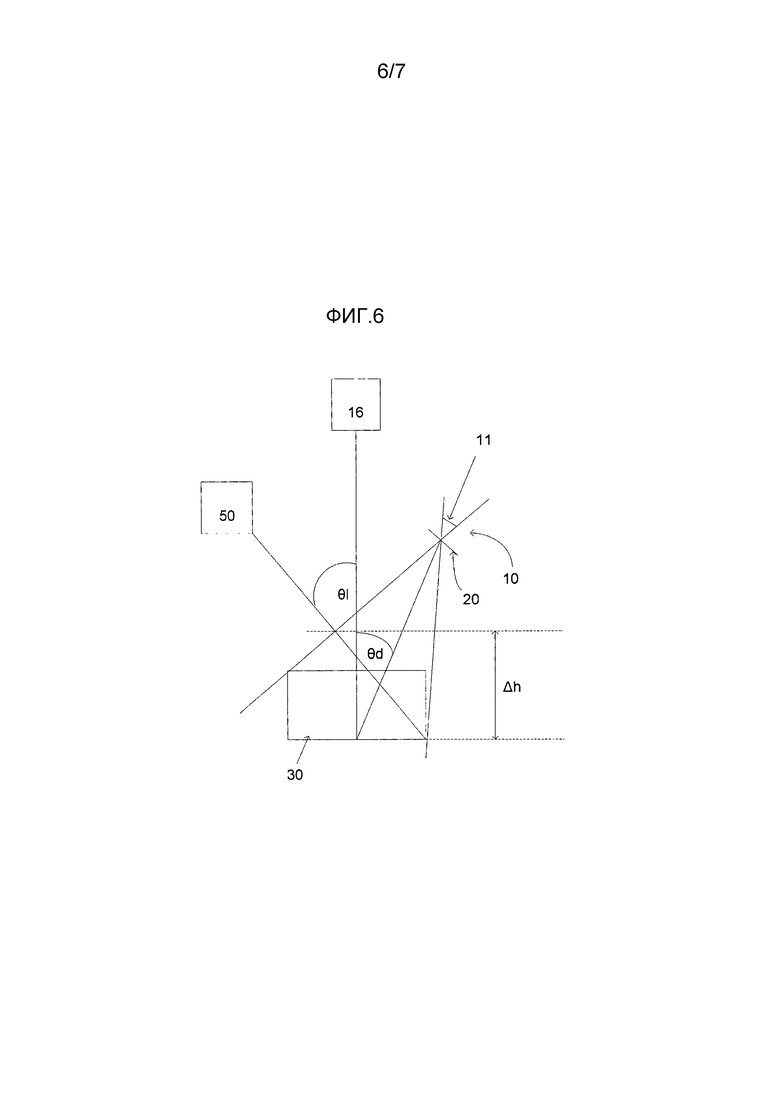
В еще одном варианте осуществления устройство профилирования глубины может содержать второй источник 50 света. Расстояние между лазерной матрицей 5 и поверхностью целевого объекта 30 может быть определено с использованием второго источника 50 света, как показано на фиг. 6. Второй лазерный источник 50 света может быть второй лазерной матрицей или, альтернативно, одним лазером. Лазер, используемый во втором источнике 50 света, может быть VCSEL.
Второй лазерный источник света 50 коллимируется и позиционируется под углом θl по отношению к лазерному проектору 16, и второй шаблон подсветки, независимый от шаблона подсветки, полученного от лазерной матрицы 5, проецируется на поверхность целевого объекта 30. Второй шаблон подсветки затем может быть захвачен с использованием устройства 10 захвата изображения. Положение второго шаблона подсветки на поверхности целевого объекта 30 изменяется с расстоянием между устройством 1 и целевым объектом 30. Положение второго шаблона подсветки и угол θl может быть использован процессором 25, чтобы определить расстояние c использованием соответствующего программного обеспечения, сохраненного в памяти 26.
Как показано на фиг. 6, только определенный диапазон Δh глубин может обнаруживаться устройством 10 захвата изображения. Устройство 1 может быть снабжено звуковой сигнализацией (не показано), управляемой процессором 25. Процессор 25 может быть сконфигурирован для приведения в действие звуковой сигнализации, когда устройство 1 находится на расстоянии от целевого объекта 30, которое позволяет профилировать поверхность целевого объекта 30.
В некоторых вариантах осуществления отдельные области лазерной матрицы 5 могут быть индивидуально адресованы таким образом, чтобы можно было получить изменяющийся во времени шаблон подсветки, который может улучшить точность триангуляции на основе определения расстояния, описанной выше. Путем импульсной работы лазерной матрицы 5 рабочий цикл лазерной матрицы 5 может быть снижен. Работа лазерной матрицы 5 может быть синхронизирована с работой устройства 10 захвата изображения для снижения энергопотребления.
В некоторых вариантах осуществления форма отдельных лазеров может варьироваться, чтобы сформировать любую двумерную форму с использованием литографических масок, например круги, квадраты или трапеции. Поэтому шаблон подсветки может быть сформирован путем комбинирования различных форм, проецируемых на поверхность целевого объекта 30. Преимуществом таких вариантов осуществления является то, что алгоритмы обработки изображений, используемые процессором 25, могут быть упрощены, так как отдельные лазеры могут быть идентифицированы на основе проецируемого шаблона подсветки.
В некоторых вариантах осуществления лазерная матрица 5 может включать в себя индивидуальные VCSEL, имеющие различные формы, чтобы формировать шаблон подсветки, отличный от описанных выше. Такой шаблон подсветки имеет преимущество, состоящее в том, что отдельные VCSEL в пределах матрицы 5 могут быть идентифицированы на основе наблюдаемого шаблона подсветки. Так как лазеры различных форм могут работать параллельно, вариации в активной области отдельных лазеров могут быть ограничены диапазоном ±10%.
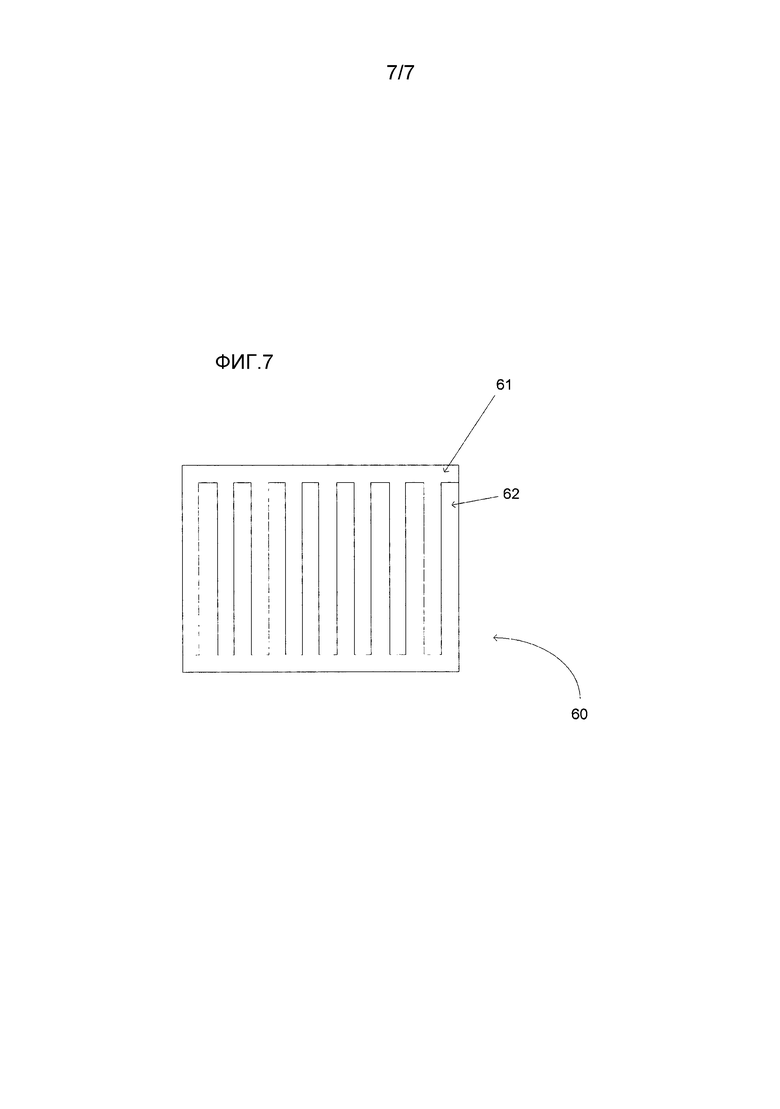
Лазерная матрица 5 поддерживается кристаллом. На фиг. 7 показан кристалл 60 согласно одному варианту осуществления. Кристалл 60 содержит первый и второй участки 61, 62 типа, которые могут по отдельности подключаться к источнику питания, чтобы обеспечить возможность электронного переключения между однородной подсветкой и структурированной подсветкой. Если работают все лазеры, то получается шаблон подсветки, имеющий прямоугольный однородный шаблон интенсивности. Путем адресации только одного из участков 61, 62 кристалла подсвечивается каждая чередующаяся строка, что приводит в результате к полосатому шаблону, позволяющему осуществлять измерение расстояния между матрицей 5 и поверхностью целевого объекта 30. Специалистам в данной области техники должно быть понятно, что более чем два участка кристалла могут быть адресованы с использованием известных методов.
Лазерная матрица 5 может быть выполнена так, чтобы отдельные лазеры могли включаться и выключаться. Этот признак имеет преимущество уменьшения неоднозначности между признаками шаблона подсветки, захваченными устройством 10 захвата изображения.
В некоторых других вариантах осуществления к каждому отдельному лазеру может быть добавлена дифракционная решетка. Добавление дифракционной решетки является технологическим процессом на уровне полупроводниковой пластины. Дифракционная решетка может стабилизировать поляризацию излучаемого лазерного света.
Устройство захвата изображения может быть снабжено поляризатором, чтобы уменьшить количество окружающего захваченного света. Окружающий свет является шумом относительно захваченного шаблона подсветки, представляющего интерес. Направление поляризации отдельных лазеров в матрице 5 может изменяться. Таким способом от матрицы могут быть получены два или более шаблонов подсветки, которые могут обнаруживаться камерой с соответствующим поляризатором. Это позволило бы избежать необходимости в дополнительных электронных средствах для включения ли выключения отдельных лазеров и выгодным образом позволило бы использовать времяпролетные и триангуляционные методы одновременно.
Следует иметь в виду, что термин "содержащий" не исключает других элементов или этапов и что указание единственного числа не исключает множества. Один процессор может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Тот факт, что определенные признаки перечислены во взаимно различных зависимых пунктах формулы изобретения не означает, что комбинация этих признаков не может быть использована с выгодой. Любые ссылочные позиции в формуле изобретения не должны быть истолкованы как ограничивающие объем изобретения.
Хотя пункты формулы изобретения были сформулированы в настоящей заявке относительно конкретных комбинаций признаков, следует понимать, что объем раскрытия настоящего изобретения также включает в себя любые новые признаки или любую новую комбинацию признаков, раскрытых здесь явно или неявно, или любое их обобщение независимо от того, относится ли это к тому же изобретению, как в настоящее время заявлено в любом пункте, и снижает ли это какие-либо или все из тех же технических проблем, что и в родительском изобретении. Заявитель настоящим уведомляет, что новые пункты формулы могут быть сформулированы с использованием таких признаков и/или комбинаций признаков в ходе рассмотрения настоящей заявки или любой другой заявки, поданной на ее основе.
Другие модификации и варианты, входящие в объем формулы изобретения, изложенной далее, будут очевидны для специалистов в данной области техники.
Группа изобретений относится к медицинской технике, а именно к средствам профилирования глубины поверхности целевого объекта. Портативное устройство содержит первый источник света, содержащий двумерную матрицу лазеров, имеющий угол раскрыва θр между примерно 5 и примерно 45 градусами, оптическое устройство, имеющее фокусное расстояние порядка нескольких миллиметров, для проецирования двумерного многострочного шаблона подсветки на участок поверхности целевого объекта, причем шаблон подсветки искажается профилем глубины поверхности целевого объекта, устройство захвата изображения, ориентированное под углом θd между примерно 25 и примерно 45 градусами относительно первого источника света, причем угол θd зависит от диапазона глубины и участка поверхности целевого объекта, процессор, выполненный с возможностью обработки захваченного изображения, чтобы восстанавливать профиль глубины двумерного участка поверхности целевого объекта из изображения, захваченного устройством захвата изображения, и средство для определения расстояния между устройством и поверхностью целевого объекта, при этом двумерная матрица содержит множество строк, причем по меньшей мере одна строка смещена вбок по отношению к смежной строке. Способ профилирования глубины поверхности осуществляется посредством устройства с использованием считываемого компьютером носителя данных. Использование изобретений позволяет расширить арсенал средств профилирования глубины поверхности. 3 н. и 10 з.п. ф-лы, 7 ил.
1. Портативное устройство (1) для профилирования глубины поверхности целевого объекта (30), причем устройство содержит:
первый источник света, содержащий двумерную матрицу лазеров (5), имеющий угол раскрыва θр между примерно 5 и примерно 45 градусами;
оптическое устройство (15), имеющее фокусное расстояние порядка нескольких миллиметров, для проецирования двумерного многострочного шаблона (31) подсветки на участок поверхности целевого объекта, причем шаблон (31) подсветки искажается профилем глубины поверхности целевого объекта (30);
устройство (10) захвата изображения, ориентированное под углом θd между примерно 25 и примерно 45 градусами относительно первого источника света, причем угол θd зависит от диапазона глубины и участка поверхности целевого объекта (30);
процессор (25), выполненный с возможностью обработки захваченного изображения, чтобы восстанавливать профиль глубины двумерного участка поверхности целевого объекта из изображения, захваченного устройством захвата изображения, и
средство для определения расстояния между устройством и поверхностью целевого объекта,
при этом двумерная матрица содержит множество строк, причем по меньшей мере одна строка смещена вбок по отношению к смежной строке.
2. Устройство по п. 1, в котором двумерная матрица лазеров содержит по меньшей мере два лазера, имеющих различные формы.
3. Устройство по п. 1 или 2, в котором двумерная матрица выполнена с возможностью переключения между режимом однородной подсветки и режимом структурированной подсветки.
4. Устройство по п. 1 или 2, в котором средство для определения расстояния между двумерной матрицей и поверхностью целевого объекта содержит второй источник света (50), наклоненный под предопределенным углом (θl) по отношению к первому источнику света,
при этом второй источник света выполнен с возможностью проецировать второй шаблон подсветки на поверхность целевого объекта и устройство захвата изображения выполнено с возможностью захвата изображения второго шаблона подсветки, и
при этом процессор дополнительно выполнен с возможностью обрабатывать захваченное изображение второго шаблона подсветки и определять расстояние между первым активным источником света и поверхностью целевого объекта на основе предопределенного угла и захваченного изображения второго шаблона подсветки.
5. Устройство по п. 3, в котором средство для определения расстояния между двумерной матрицей и поверхностью целевого объекта содержит второй источник света (50), наклоненный под предопределенным углом (θl) по отношению к первому источнику света,
при этом второй источник света выполнен с возможностью проецировать второй шаблон подсветки на поверхность целевого объекта и устройство захвата изображения выполнено с возможностью захвата изображения второго шаблона подсветки, и
при этом процессор дополнительно выполнен с возможностью обрабатывать захваченное изображение второго шаблона подсветки и определять расстояние между первым активным источником света и поверхностью целевого объекта на основе предопределенного угла и захваченного изображения второго шаблона подсветки.
6. Устройство по любому из пп. 1 или 2, в котором двумерная матрица лазеров содержит лазеры поверхностного излучения с вертикальным объемным резонатором.
7. Устройство по п. 3, в котором двумерная матрица лазеров содержит лазеры поверхностного излучения с вертикальным объемным резонатором.
8. Устройство по п. 4, в котором двумерная матрица лазеров содержит лазеры поверхностного излучения с вертикальным объемным резонатором.
9. Устройство по п. 5, в котором двумерная матрица лазеров содержит лазеры поверхностного излучения с вертикальным объемным резонатором.
10. Способ профилирования глубины поверхности целевого объекта (30) с использованием портативного устройства по пп. 1-9, причем способ содержит:
проецирование двумерного многострочного шаблона (31) подсветки от первого источника света, содержащего двумерную матрицу лазеров (5), на участок поверхности целевого объекта;
захват изображения шаблона подсветки устройством (10) захвата изображения, ориентированным под углом θd между примерно 25 и примерно 45 градусами относительно первого источника света, причем угол θd зависит от диапазона глубины и участка поверхности целевого объекта (30);
обработку захваченного изображения для восстановления профиля глубины участка поверхности целевого объекта из изображения, захваченного устройством захвата изображения, и
определение расстояния между портативным устройством и поверхностью целевого объекта,
при этом двумерная матрица содержит множество строк, причем по меньшей мере одна строка смещена вбок по отношению к смежной строке.
11. Способ по п. 10, дополнительно содержащий переключение двумерной матрицы между режимом однородной подсветки и режимом структурированной подсветки.
12. Способ по п. 10 или 11, в котором определение расстояния между двумерной матрицей и поверхностью целевого объекта включает в себя:
направление второго источника света (50) к целевому объекту, причем второй источник света ориентирован под предопределенным углом (θl) к первому источнику света,
проецирование от второго источника света второго шаблона подсветки на поверхность целевого объекта,
захват изображения второго шаблона подсветки,
обработку захваченного изображения второго шаблона подсветки, и
определение расстояния между первым активным источником света и поверхностью целевого объекта на основе предопределенного угла и захваченного изображения второго шаблона подсветки.
13. Считываемый компьютером носитель данных для профилирования глубины поверхности целевого объекта (30), выполненный с возможностью хранения инструкций компьютерной программы, которые, при исполнении процессором, выполняют способ по любому из пп. 10-12.
| US 2011134114 A1, 09.06.2011 | |||
| US 2009118720 A1, 07.05.2009 | |||
| US 2011058372 A1, 10.03.2011 | |||
| US 5933240 A, 03.08.1999 | |||
| WO 2011021139 A2, 24.02.2011 | |||
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ СЛОЖНОГО ПРОФИЛЯ, РАСПОЛОЖЕННОЙ НА ЗАДАННОЙ ГЛУБИНЕ ОБЪЕКТА | 1993 |
|
RU2050543C1 |

