ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к оптической когерентной томографии. В частности, варианты осуществления настоящего изобретения относятся к устройству для оптической когерентной томографии глаза и способу оптической когерентной томографии глаза.
УРОВЕНЬ ТЕХНИКИ
Для создания трехмерной (3D) томограммы глаза с помощью оптической когерентной томографии (ОКТ) принято записывать множество изображений ОКТ, расположенных в линиях (например, А-сканов) и/или слоями (например, В-сканов) по отношению друг к другу в объеме сканируемого глаза, и регистрировать эти изображения последовательно по отношению друг к другу, чтобы сформировать томограмму.
Тем не менее во время захвата множественных изображений ОКТ глаз может совершать движения. В этом случае после 3D-регистрации финальная 3D-томограмма показывает движение индуцированных посторонних шумов. Эти посторонние шумы снижают качество 3D-томограммы, к примеру, геометрия, контур или профиль высоты глаза или отдельных его частей, таких как роговица, воспроизводятся менее качественно.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Существует необходимость в создании устройства для оптической когерентной томографии глаза и способа для оптической когерентной томографии глаза, которые позволяют получить томограммы улучшенного качества.
Устройство для оптической когерентной томографии глаза включает систему камер, сконфигурированную для захвата фотоснимков ОКТ глаза с высоким временным разрешением, и блок получения снимков ОКТ, сконфигурированный для получения фотоснимков ОКТ глаза с высоким временным разрешением. Измерительная ось оптической когерентной томографии блока получения изображений и измерительная ось системы камер выровнены вдоль общей измерительной оси аппарата с использованием расщепителя луча. Аппарат дополнительно содержит блок управления, сконфигурированный для определения по фотоснимкам с высоким временным разрешением данных о движениях с высоким временным разрешением, представляющих собой движения глаза по отношению к измерительной оси аппарата. Блок управления также сконфигурирован таким образом, чтобы преобразовывать по меньшей мере часть изображений ОКТ на основе данных о движении и генерировать томограммы из изображений ОКТ, например из трансформированных изображений ОКТ.
Другими словами, аппарат может использовать систему камер для изображения глаза в высоком временном разрешении таким образом, что блок управления может извлекать данные о движении из изображений камеры, которые позволяют определить движение глаз, например, чтобы решить, было ли оно вообще, и если да, то как движется глаз. Таким образом, данные о движении с высоким временным разрешением могут позволить реконструировать пространственное положение и ориентацию глаза способом с высоким временным разрешением. Пространственное положение и ориентация глаз может относиться к измерительной оси аппарата и, таким образом, к положению и ориентации аппарата. Из данных о движении блок управления может интерполировать пространственное положение и/или ориентацию глаза способом с высоким временным разрешением, например, даже в течение времени между двумя последовательными захватами изображений камерами. Таким образом, система камер может рассматриваться в качестве глазного трекера. Соответственно, данные о движении могут рассматриваться как данные о глазном трекере.
Так как изображения оптической когерентной томографии глаза также получены способом с высоким временным разрешением, каждое из изображений оптической когерентной томографии может быть связано с соответствующим пространственным положением и ориентацией глаза. Таким образом, изображения оптической когерентной томографии могут быть обработаны на основе данных о движении. Например, изображения ОКТ, которые приводят к посторонним шумам в томограмме, вызванным движениями, могут быть (пиксельно) преобразованы с помощью линейных функций преобразования, например вращений или смещений, таким образом, что движение глаза компенсируется. Аппарат может быть приспособлен таким образом, что изображения оптической когерентной томографии могут быть расположены и/или ориентированы (зарегистрированы) по отношению друг к другу. Это позволяет генерировать томограммы без посторонних шумов движения и, следовательно, улучшать качество. Поскольку получение изображений ОКТ может быть синхронизировано с получением данных о движении или поскольку, пока данные изображений ОКТ и данные о движении могут быть коррелированы во времени по отношению друг к другу, не имеет особого значения, каким образом получены изображения ОКТ или как выглядит специальный алгоритм сканирования.
Измерительной осью системы камер может быть оптическая ось одной или всех камер, входящих в систему камер. Измерительной осью блока получения изображений ОКТ может быть направление распространения образца светового пучка в плече с образцом блока получения изображений ОКТ. Общей измерительной осью аппарата может быть оптическая ось, определенная видоискателем блока получения изображений ОКТ. Расщепителем луча может быть куб, пластина, пленка, или полупрозрачное зеркало, или полосно-пропускающее зеркало, которое только отражает или передает частоту полос, в которых частота света в блоке получения изображений ОКТ падает. Расщепитель луча может быть покрыт дихроическими слоями. Система камер может изображать глаз через видоискатель блока получения изображений ОКТ. Из данных о движении, блок управления может интерполировать пространственное положение и ориентацию глаза способом с высоким временным разрешением между двумя последовательными захватами изображений камерой. Изображение ОКТ может представлять единичный линейный скан (A-скан), слоевой скан (B-скан), содержащий множество линейных сканов, или объемный скан, включающий множество B-сканов. Единичное изображение ОКТ может быть получено так быстро, что во время периода получения, соответственно, не будут присутствовать какие-либо посторонние шумы на изображении ОКТ. Данные о движении с высоким временным разрешением можно понимать как данные пространственного положения с высоким временным разрешением. По данным о пространственном положении с высоким временным разрешением могут быть рассчитаны данные о движении с высоким временным разрешением (и наоборот) с использованием блока управления.
Аппарат может дополнительно содержать по меньшей мере два точечных источника света, сконфигурированных таким образом, чтобы освещать роговицу глаза так, чтобы изображения с высоким временным разрешением содержали для каждого точечного источника света световой указатель. Световой указатель может быть отражением от поверхности глаза, то есть роговицы, и может привести к рефлексу Пуркинье или изображению Пуркинье. В связи с этим точечные источники света могут быть смещены в сторону от измерительной оси аппарата в фиксированном положении. Излучение точечных источников света позволяет осуществлять пространственный трекинг (например, центров) световых указателей с высоким временным разрешением, показанных на фотоизображениях. Для этого блок управления может быть сконфигурирован так, чтобы определять в качестве данных о движении пространственное положение с высоким временным разрешением по меньшей мере двух световых указателей. По данным о движении может быть вычислено расстояние между позициями двух световых указателей, например, с помощью блока управления. Это расстояние изменяется с осевым смещением глаза по отношению к аппарату. «Осевой» может соответствовать Z-координате вдоль измерительной оси аппарата. Блок управления может быть откалиброван таким образом, что при любом пространственном положении световых указателей и/или любого пространственного расстояния между положением по меньшей мере двух световых указателей может быть назначено соответствующее аксиальное (z) смещение глаз по отношению к аппарату. Это позволит более точно определить осевое смещение с высоким временным разрешением (z) положения и/или движения глаз и таким образом улучшить коррекцию изображений ОКТ, свободных от индуцированных посторонних шумов.
В качестве альтернативы или в дополнение к описанному устройство может включать в себя множество точечных источников света, расположенных в геометрическом порядке точечных источников света. Геометрический порядок точечных источников света может быть круглым, дуговым, прямоугольным, подобным прямоугольному, в форме звезды или звездообразного скопления. Точечные источники света могут быть сконфигурированы таким образом, чтобы освещать роговицу глаза так, чтобы изображения с высоким временным разрешением содержали множество световых указателей в геометрическом порядке световых указателей: круглом, дуговом, прямоугольном, подобном прямоугольному, в форме звезды или звездообразного скопления. Блок управления может быть выполнен с возможностью определения по данным движения пространственного размера геометрического изображения с высоким временным разрешением, например круглого, дугового, прямоугольного, подобного прямоугольному, в форме звезды и/или звездообразного, установленного в зависимости от множества световых указателей. Например, в случае окружности, пространственный размер с высоким временным разрешением может быть представлен диаметром подогнанной окружности. Можно считать, что это соответствует одновременному определению расстояния между позициями двух световых указателей для разных пар точечных источников света, представляющих характеристическую усредненную величину. Блок управления может быть откалиброван таким образом, что для каждого пространственного размера геометрического порядка, установленного на световой указатель, может быть назначено соответствующее осевое (z) смещение глаза по отношению к аппарату. Это может позволить более точно определить осевое смещение с высоким временным разрешением (z) положения и/или движения глаз и таким образом улучшить коррекцию изображений ОКТ, свободных от индуцированных посторонних шумов.
Аппарат может содержать блок определения контура роговицы и быть сконфигурированным для определения значений кривизны, представляющих кривизну внешней поверхности роговицы глаза. Это может позволить определить кривизну вдоль меридианов внешней поверхности роговицы и таким образом более точно определить калибровку блока управления для присвоения осевого (z) смещения глаз по отношению к аппарату. Например, блок определения контура роговицы может быть компонентом аппарата отдельно от системы камер и блока захвата изображений OКT.
В качестве альтернативы или в дополнение к описанному блок управления может быть выполнен с возможностью определения значений кривизны от изображений ОКТ, значений кривизны, представляющих кривизну наружной поверхности роговицы глаза.
Точечными источниками света могут быть светоизлучающие диоды (LED, OLED). Система камер может содержать отдельную камеру, такую как видеокамера, для захвата изображения с камеры, показывающей световые следы.
В качестве альтернативы или в дополнение к описанному блок управления может быть выполнен с возможностью определения, по данным о движении, позиции с временным разрешением опорной точки, которая является центром геометрического порядка, например круга и/или эллипса, установленным на зрачке глаза, и/или с наружного края радужной оболочки глаза, и/или в центре геометрического порядка, например круглого, дугового, прямоугольного, подобного прямоугольному, в форме звезды или звездообразного скопления, установленного на световых указателях. Так, например, наклон глаз по отношению к измерительной оси может быть обнаружен с помощью смещения центра геометрического порядка, установленного на зрачок глаза и/или с наружного края радужной оболочки глаза по отношению к центру геометрического порядка, установленного на световых указателях. Это может позволить боковому трекингу с высоким временным разрешением (x, y) отслеживать позицию и/или движения глаза и таким образом корректировать изображение ОКТ, свободное от посторонних шумов индуцированных боковыми смещениями (x, y). «Боковое» может соответствовать x- и/или y-координате (-ам) в направлении, перпендикулярном к измерительной оси аппарата. В частности, аппарат может быть откалиброван таким образом, что для каждого указанного смещения центра геометрического порядка, установленного на зрачок глаза и/или с наружного края радужной оболочки глаз относительно центра геометрического порядка, установленного по световым указателям, может быть вычислен определенный угол наклона глаз по отношению к измерительной оси. Кроме того, аппарат может быть приспособлен для регистрации изображений ОКТ по отношению друг к другу на основе упомянутого вычисления угла наклона.
Система камер может содержать отдельную камеру, такую как видеокамера, для захвата изображения, показывающего зрачок, лимб и/или радужную оболочку глаза.
В качестве альтернативы или дополнения блок управления может быть выполнен с возможностью определения, например, данных о движении, положении глаза высоким временным разрешением, особенностью которого является детализированная характеристика радужной оболочки глаза и/или структуры сосудов в склере глаза. Это может позволить осуществлять вращение (циклодукцию) с высоким временным размещением и трекинг позиции и/или движения глаза и таким образом корректировать изображения ОКТ, свободные от индуцированных вращением (циклодукцией) посторонних шумов.
Система камер может содержать отдельную камеру, такую как видеокамера, для захвата изображения, показывающего детализированную характеристику радужной оболочки глаза и/или структуры сосудов в склере глаза.
Система камер может содержать только одну камеру для захвата изображений с камеры, показывающей световые указатели, для захвата изображения с камеры, показывающей зрачок, лимб и/или радужную оболочку глаза, и для захвата изображения с камеры, показывающей детализированную характеристику радужной оболочки и/или структуры сосудов в склере глаза. Это может позволить спроектировать компактный и легкий аппарат.
Система камер может быть сконфигурирована для захвата изображений с высоким временным разрешением с частотой отображения изображений камеры. Блок получения изображений ОКТ может быть настроен на получение изображений с высоким временным разрешением ОКТ с частотой отображения изображений ОКТ. Блок управления может быть сконфигурирован для управления скоростью обработки изображений камеры и/или скоростью формирования изображения OКT.
Частота отображения изображений камеры может по существу быть эквивалентной скорости визуализации ОКТ. Например, частота отображения изображений камеры и частота отображения изображений ОКТ могут быть синхронизированы друг с другом. Это позволяет назначать одно изображение с камеры для каждого изображения ОКТ и таким образом проводить временную адаптированную коррекцию изображений ОКТ, свободных от посторонних шумов движения.
Кроме того, скорость отображения изображений камеры может быть ниже, чем скорость обработки изображений ОКТ. Это может позволить назначить одно изображение с камеры на несколько различных изображений ОКТ; таким образом меньше времени тратится на определение данных о движении и, следовательно, быстрее воспроизводится томограмма.
Существует также альтернатива, где скорость визуализации камеры может быть выше, чем скорость обработки изображений OКT. Это может позволить назначить несколько изображений с камеры для каждого изображения ОКТ, позволяющего осуществлять коррекцию изображений ОКТ с высоким временным разрешением на основе сканирования, когда каждое ОКТ-сканирование включает несколько А-сканов.
Способ оптической когерентной томографии (OКT) для глаза содержит этапы:
- захват изображений ОКТ глаза с высоким временным разрешением с камеры с помощью системы камер,
- получение изображения ОКТ глаза с высоким временным разрешением, с использованием блока получения изображения ОКТ, где измерительная ось блока получения изображений ОКТ и измерительная ось системы камер выстраиваются вдоль общей измерительной оси,
- определение из изображений с высоким временным разрешением данных о движении, представляющих движение глаз по отношению к измерительной оси, с использованием блока управления,
- преобразование по меньшей мере части изображений ОКТ на основании данных о перемещении с помощью блока управления,
- генерация томограмм от изображений ОКТ, например от трансформированных изображений ОКТ, с помощью блока управления.
Общей измерительной осью измерения может быть общая измерительная ось аппарата для осуществления способа.
В части того, насколько способ или отдельные этапы способа для оптической когерентной томографии описан/ы в данном раскрытии, способ или отдельные этапы способа можно выполнить соответствующим образом сконфигурированным аппаратом или компонентом аппарата. Аналогичные замечания относятся к выяснению режима работы аппарата, выполняющего этапы способа. В этом смысле особенности аппарата и особенности способа в данном описании могут считаться эквивалентными.
Устройство для оптической когерентной томографии и/или способ оптической когерентной томографии описан/ы выше по отношению к глазу. Однако аппарат и/или способ можно также использовать для оптической когерентной томографии любого другого образца.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения будут далее по тексту поясняться на основе прилагаемых чертежей, на которых:
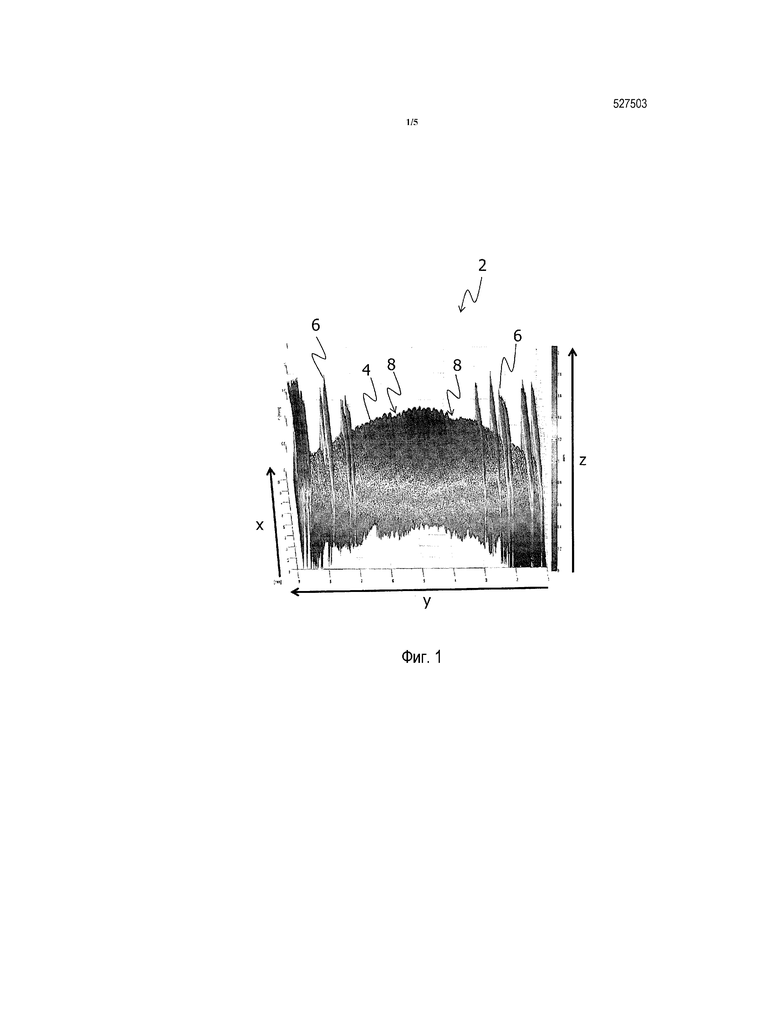
Фиг. 1 схематично иллюстрирует пример 3D-томограммы, представляющий профиль высоты передней поверхности человеческой роговицы,
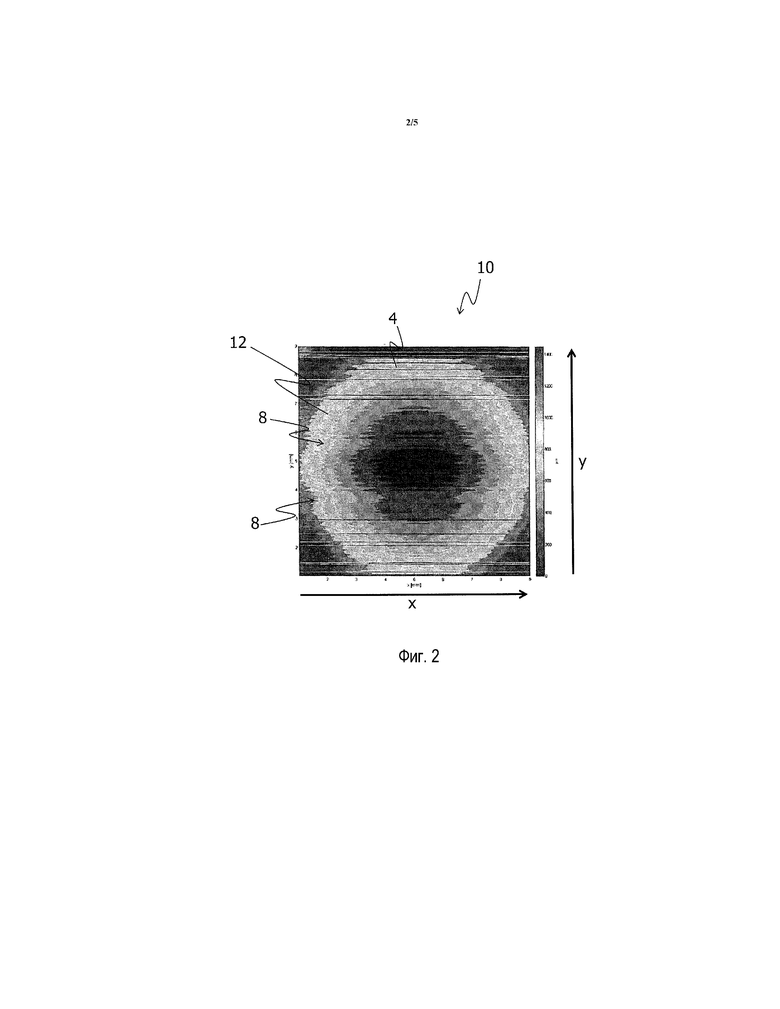
Фиг. 2 схематично показывает пример профиля высоты Фиг. 1 в 2D-представлении с высотой контурных линий,
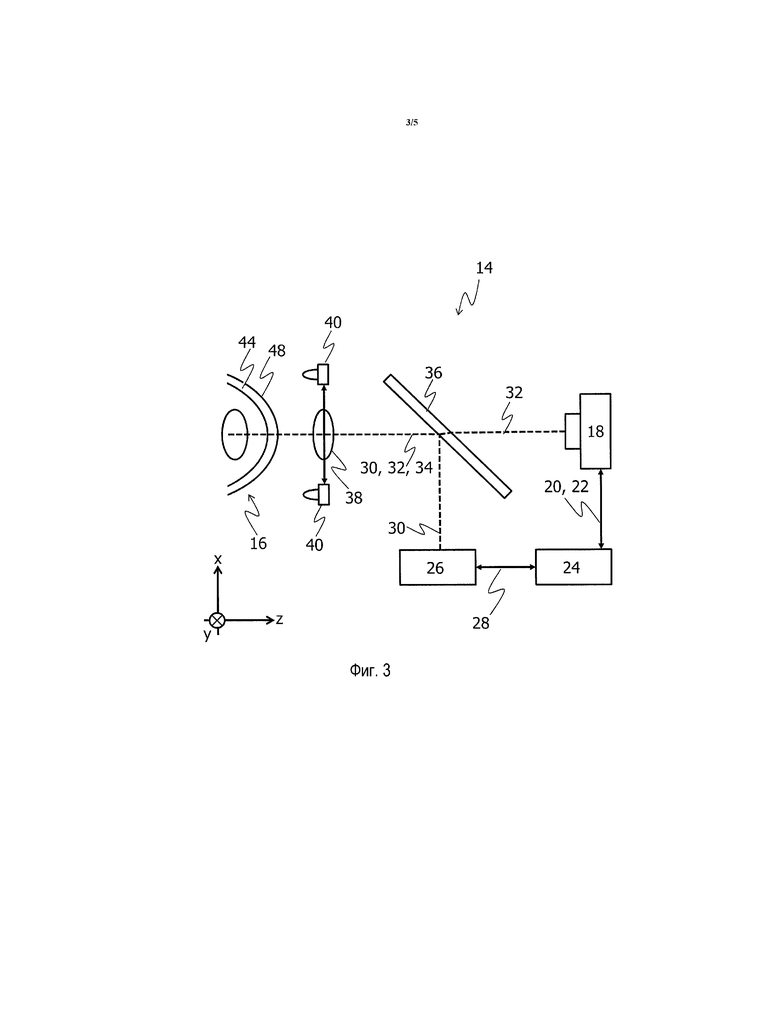
Фиг. 3 схематически иллюстрирует варианты осуществления аппарата для оптической когерентной томографии глаза,
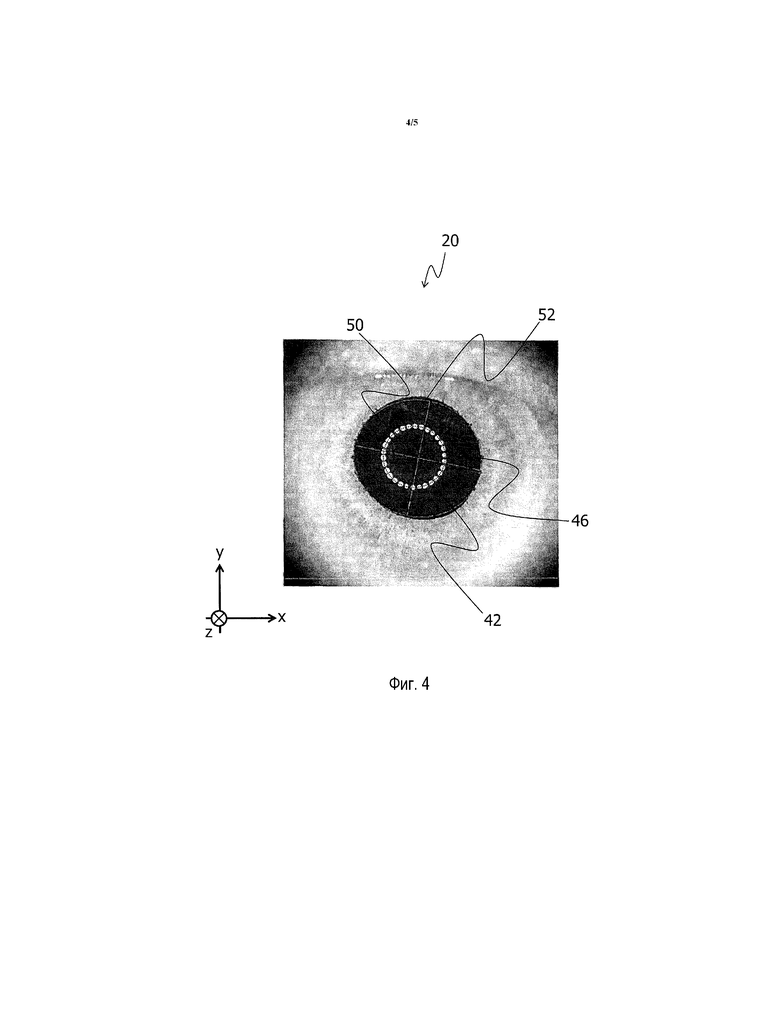
Фиг. 4 схематически иллюстрирует изображения глаза камерой для определения данных о движении,
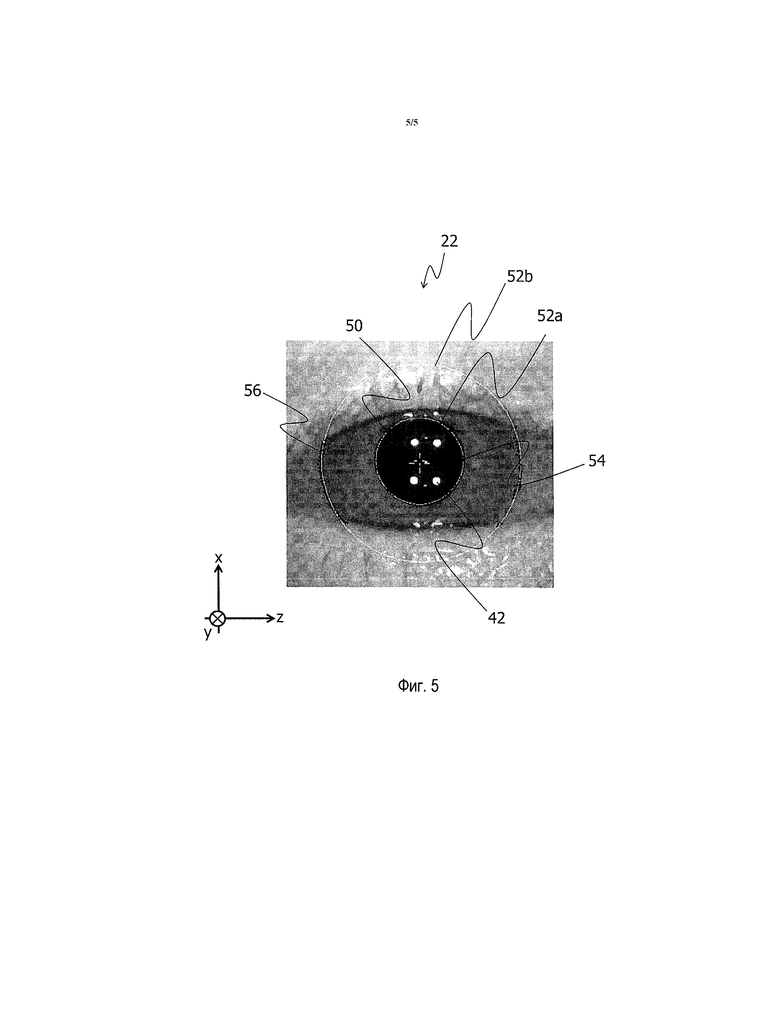
Фиг. 5 схематически иллюстрирует другие изображения глаза камерой для определения данных о движении.
Фиг. 1 схематически показывает трехмерную (3D) томограмму 2 передней поверхности роговицы глаза человека. Томограмма 2 была сгенерирована с помощью стандартного аппарата для оптической когерентной томографии (ОКТ). Чтобы сгенерировать 3D-томограмму, было записано множество изображений ОКТ, расположенных слоями 4. Эти единичные слои 4 являются B-сканами ОКТ 4 и обуславливают структурные срезы томограммы 2. Каждый B-скан 4 содержит множество линейных A-сканов (не показаны/неразрешимы на Фиг. 1). Томограмма 2 Фиг. 1 состоит из 500x500 A-сканов, где один B-скан 4 состоит из 500 этих А-сканов.
Фиг. 1 показывает два разных посторонних шума: во-первых, как видно в левой и в правой частях изображения, одиночные шипы 6 представляют одно сканирование B-скана 6, резко смещаемого в направлении Z. Эти шипы 6 индуцируются в результате неправильной сегментации. Эти посторонние шумы 6, однако, не индуцированы движением глаза. Второй вид посторонних шумов показан в средней части изображения и в этом примере представлен двумя группами около трех или четырех B-сканов в каждом, которые обычно немного сдвинуты в направлении, противоположном направлению z. Эти посторонние шумы 8 индуцируются движением глаза при получении многократного сканирования B-сканов 4 томограммы 2.
Посторонние шумы 8, индуцированные движением, также можно увидеть на Фиг. 2, которая показывает 2D-представление 10 в 3D-томограмме 2, показанной на Фиг. 1. Эти посторонние шумы 8 являются результатом отклонения от идеально круглой формы контура высоты линий 12. Движение индуцированного постороннего шума 8 снижает качество томограмм 2, 10, так как геометрия, контур и профиль высоты роговицы воспроизводятся в томограммах 2, 10 менее качественным образом, что не отражает реальность.
Чтобы включить 2D- и/или 3D-томограммы улучшенного качества, устройство 14 для ОКТ для глаза 16 включает систему камер 18, см. Фиг. 3. Система камер 18 фиксирует изображения с высоким временным разрешением 20, 22 глаза 16. На Фиг. 4 и 5 примеры отдельных изображений с камеры 20, 22 показаны представляющими один конкретный момент времени. Система камер 18 подключена к блоку управления 24 аппарата 14 для передачи изображения с камер 20, 22 к блоку 24 управления для обработки изображений, см. Фиг. 3.
Аппарат 14 дополнительно содержит блок 26 получения изображений ОКТ, который получает изображения ОКТ с высоким временным разрешением 28, такие как B-сканы 4 глаза 16, см. Фиг. 1, 2. Блок 26 получения изображений ОКТ соединен с блоком 24 управления для передачи изображений ОКТ 28 к блоку 24 управления для обработки изображений.
Измерительная ось 30 блока получения изображения ОКТ 26 и измерительная ось 32 системы камер 18 выровнены вдоль общей измерительной оси 34 аппарата 14 с помощью расщепителя луча 36. Измерительной осью 32 системы камер 18 является оптическая ось одной или нескольких камер, входящих в систему камер 18. Измерительная ось 30 блока получения изображений ОКТ 26 направлена на распространение луча света в плече света блока получения изображений ОКТ 26. Общей измерительной осью 34 может быть оптическая ось, определяемая видоискателем 38 блока получения изображений ОКТ 26. Расщепитель луча 36 - это полосовое зеркало, которое отражает только полосу частот, в которой частота получения изображений ОКТ в блоке получения падает, и все остальное, по существу, является прозрачным для света таким образом, что система камер 18 может показать изображение глаза 16 через расщепитель 36 луча и видоискатель 38. Конечно, компоненты 18 и 26 могут быть заменены таким образом, что свет для системы камер 18 отражается на расщепитель луча 36, и свет для блока получения изображений ОКТ 26 передается через расщепитель 36 луча.
Блок 24 управления определяет из изображений с высоким временным разрешением 20, 22 данные о движении, представляющие движение глаза 16 по отношению к общей измерительной оси 34 аппарата 14. Данные о движении с высоким временным разрешением позволяют реконструировать пространственное положение и ориентацию глаза 16 относительно положения и ориентации аппарата 14. Так как изображения ОКТ 28 также получены в высоком временном разрешении, каждое изображение 28 ОКТ может быть связано с соответствующим пространственным положением и ориентацией глаза. На основе данных о движении блок 24 управления преобразует по меньшей мере часть из изображений ОКТ 28. Например, изображения ОКТ 28, которые приведут к постороннему шуму, индуцированному движением 8 в томограмме 2, 10 преобразуются таким образом, что движение глаз 16 компенсируется. Затем блок 24 управления генерирует 2D- и/или 3D-томограмму глаза 16 из изображений ОКТ 28. По этой обработке изображений посторонние шумы, такие как указаны на 8 Фиг. 1 и 2, можно предотвратить.
Аппарат 14 дополнительно содержит множество точечных источников света 40 (только два из которых показаны на Фиг. 3). В точечных источниках света светодиоды расположены в поперечном направлении и смещены от измерительной оси 34 в непосредственной близости от видоискателя 38. Точечные источники света 40 освещают роговицы 44 глаза 16, так что изображения с высоким временным разрешением 20, 22 показывают для каждого точечного источника света 40 световой указатель 42, см. Фиг. 4 и 5. Точечные источники света 40 могут быть расположены по кругу вокруг общей измерительной оси 34 и видоискателя 38, таким образом, что изображения с высоким временным разрешением 20 показывают множество световых указателей 42 по круговому трафарету, см. Фиг. 4. В качестве альтернативы две пары точечных источников света 40 могут быть расположены в виде прямоугольного шаблона вокруг общей измерительной оси 34 и видоискателя 38, таким образом изображения с высоким временным разрешением 22 показывают множество световых указателей 42 в подобном прямоугольному шаблоне, см. Фиг. 5.
Блок 24 управления затем определяет по данным о движении пространственное положение с высоким временным разрешением двух световых указателей 42, диаметрально лицом друг к другу в круглой и/или прямоугольной, как шаблон, форме в изображении 20, 22 см. Фиг. 4 и 5 соответственно. Пространственное расстояние между этими двумя позициями рассчитывается блоком 24 управления. Это пространственное расстояние изменяется с осевым смещением глаза 16 при движении вдоль общей измерительной оси 34 (то есть вдоль z). Блок 24 управления откалиброван таким образом, что любому пространственному расстоянию между двумя световыми указателями 42 может быть назначено соответствующее осевое (z) смещение глаза 16 по отношению к аппарату 14. Это позволяет точно отслеживать осевой (z) трекинг с высоким временным разрешением положения и движения глаза 16 и таким образом позволяет производить коррекцию изображений ОКТ 28, свободных от посторонних шумов, индуцированных осевыми (z) смещениями.
В качестве альтернативы блок 24 управления может быть настроен для возможности определения, по данным о движении, пространственного размера окружности 46 с высоким временным разрешением (пунктирная линия на Фиг. 4) и/или прямоугольника (см. Фиг. 5), установленного на множестве световых указателей 42, показанных в камере изображений 20. Это соответствует одновременному определению пространственных расстояний между двумя световыми указателями 42 для нескольких пар точечных источников света 42. Блок управления 24 может быть откалиброван таким образом, что любому пространственному размеру может быть назначено соответствующее осевое (z) смещение глаза 16 по отношению к аппарату 14. Это позволяет точно отслеживать осевой (z) трекинг с высоким временным разрешением положения и движения глаза 16 и таким образом позволяет производить коррекцию изображений ОКТ 28, свободных от посторонних шумов, индуцированных осевыми (z) смещениями.
Блок 24 управления также определяет значения кривизны изображения ОКТ 28, представляющие кривизну наружной поверхности 48 роговицы 44. Это позволяет определить кривизну вдоль меридианов наружной поверхности 48 роговицы 44 и таким образом более точно определить калибровку блока 24 управления для назначения осевого (z) смещения глаза 16 по отношению к аппарату 14.
Блок 24 управления также определяет, по данным о движении, позиции опорной точки 50, 50а, 50b с высоким временным разрешением, являющейся центром окружности 52, 52а, 52b и/или кругообразной формы, установленной на зрачок 54 глаза 16 и/или с наружного края радужной оболочки 56 глаза 16 см. Фиг. 4 и 5. На Фиг. 4, например, круг 52 установлен на зрачке. На Фиг. 5 определяются две опорные точки 50а, 50b, показан перекресток центров двух кругов 52а, 52b, один круг 52а установлен на зрачке 54, другой круг 52b установлен на краю радужной оболочки 56. Это позволяет смещать индуцированные посторонние шумы по боковой линии (x, y), отследить положение и движение глаз 16 и таким образом скорректировать изображение ОКТ 28, свободное от посторонних шумов по боковой линии (x, y).
Кроме того, блок управления определяет, по данным о движении, положение глаза с высоким временным расширением, в особенности детализированную характеристику радужной оболочки 56 глаза 16 и/или структуры сосуда в склере глаза 16 (не показано). Это позволяет с высоким временным разрешением отслеживать вращательные (т.е. связанные с циклодукцией) положения и движения глаза 16 и, таким образом корректируя изображения ОКТ, свободные от посторонних шумов, вызванных вращением (циклодукцией) .
Система камер 18 фиксирует изображения с высоким временным разрешением с камеры 20, 22 со скоростью отображения изображений камеры. Блок получения изображений ОКТ 26 получает изображения ОКТ 28 с высоким временным разрешением со скоростью формирования изображений ОКТ. Блок 24 управления контролирует скорость формирования изображения камеры и скорость формирования изображения ОКТ.
В обычном расположении скорость отображения камеры практически эквивалентна скорости отображения ОКТ. Например, путем синхронизации скорости отображения камеры и скорости формирования изображения ОКТ. Это позволяет назначать одно изображение с камеры 20, 22 к каждому изображению ОКТ 28, и таким образом происходит коррекция изображений ОКТ 28, свободных от посторонних шумов движения. В альтернативе скорость визуализации камеры ниже, чем скорость обработки изображений ОКТ. Это позволяет назначать одно изображение с камеры 20, 22 к нескольким различным изображениям ОКТ 28, таким образом, меньше времени тратится на определение данных о движении, что, следовательно, способствует более быстрому созданию томограмм 2, 10. В еще одной альтернативной установке скорость визуализации камеры выше, чем скорость обработки изображений ОКТ. Это позволяет назначать несколько изображений с камеры 20, 22 к каждому изображению ОКТ 28, что весьма благоприятно для коррекции изображений ОКТ с высоким временным разрешением на основе A-сканирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ | 2011 |
|
RU2561867C2 |
| Способ визуализации плавающих помутнений стекловидного тела ретролентального пространства с помощью оптической когерентной томографии высокого разрешения | 2021 |
|
RU2790327C1 |
| ОПТИЧЕСКИЙ КОГЕРЕНТНЫЙ ТОМОГРАФИЧЕСКИЙ АППАРАТ | 2013 |
|
RU2544294C2 |
| УСТРОЙСТВО И СПОСОБ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ | 2012 |
|
RU2514725C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ЦИЛИАРНОГО ТЕЛА И УГЛА ПЕРЕДНЕЙ КАМЕРЫ ГЛАЗА И СПОСОБ ОЦЕНКИ ТЯЖЕСТИ ТУПОЙ ТРАВМЫ ГЛАЗА | 2007 |
|
RU2344764C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАМЕТРА ЦИЛИАРНОЙ БОРОЗДЫ МЕТОДОМ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ ПЕРЕДНЕГО ОТРЕЗКА ГЛАЗА | 2012 |
|
RU2521834C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ГЛАЗНОГО ДНА С ПОМОЩЬЮ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ | 2009 |
|
RU2545452C2 |
| Способ ангиографии в эндоскопической оптической когерентной томографии | 2018 |
|
RU2692225C1 |
| ВНУТРИХИРУРГИЧЕСКОЕ ИЗОБРАЖЕНИЕ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ ОПЕРАЦИИ ПО УДАЛЕНИЮ КАТАРАКТЫ | 2012 |
|
RU2627605C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ | 2009 |
|
RU2459197C1 |
Группа изобретений относится к медицине. Способ оптической когерентной томографии (ОКТ) глаза осуществляется с помощью аппарата для оптической когерентной томографии (ОКТ). При этом способ содержит этапы: захват изображений глаза с камеры с высоким временным разрешением, используя систему камер; получение изображения ОКТ глаза с высоким временным разрешением, используя блок получения изображения ОКТ, причем измерительная ось блока получения изображений ОКТ и измерительные оси системы камер выровнены вдоль общей измерительной оси аппарата, используя расщепитель луча; освещение роговицы глаза с использованием множества точечных источников света, расположенных в геометрическом порядке точечных источников света вокруг измерительной оси так, чтобы изображения камер с высоким временным разрешением содержали множество световых указателей в геометрическом порядке световых указателей; определение по изображениям камер с высоким временным разрешением данных о движении с высоким временным разрешением, представляющих движение глаза относительно измерительной оси, с использованием блока управления; определение с высоким временным разрешением, в качестве данных о движении, пространственного размера геометрического порядка, соответствующего множеству световых указателей, с использованием блока управления; назначение каждому пространственному размеру геометрического порядка, соответствующего световым указателям, соответствующего осевого смещения глаза по отношению к аппарату с использованием блока управления; преобразование изображений ОКТ на основе данных о движении с использованием блока управления; и генерирование томограммы глаза из изображений OКT с использованием блока управления. Применение группы изобретений позволит улучшить качество получаемой томограммы. 2 н. и 11 з.п. ф-лы, 5 ил.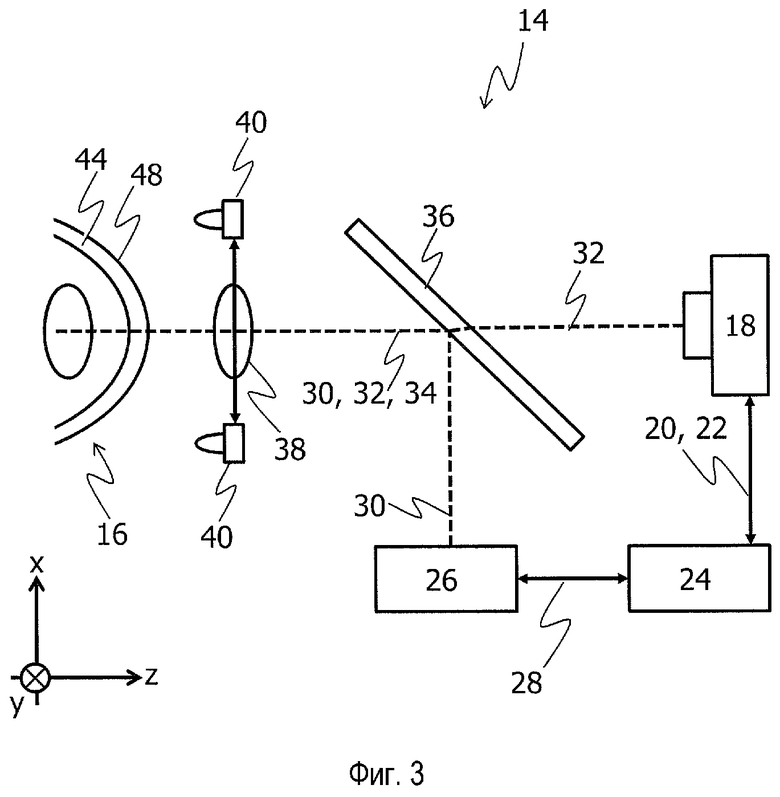
1. Аппарат для оптической когерентной томографии (ОКТ) глаза, содержащий:
систему камер, выполненную с возможностью захвата изображений глаза с камеры с высоким временным разрешением;
блок получения изображений ОКТ, выполненный с возможностью получения изображений ОКТ глаза с высоким временным разрешением, причем измерительная ось блока получения изображений ОКТ и измерительные оси системы камер выровнены вдоль общей измерительной оси аппарата, используя расщепитель луча;
блок управления, выполненный с возможностью:
определения по изображениям камер с высоким временным разрешением данных о движении с высоким временным разрешением, представляющих движение глаза относительно измерительной оси аппарата;
преобразования по меньшей мере части изображений ОКТ на основе данных о движении; и
генерирования томограммы глаза из изображений OКT; и
множество точечных источников света, расположенных в геометрическом порядке точечных источников света вокруг измерительной оси аппарата, причем точечные источники света выполнены с возможностью освещения роговицы глаза так, чтобы изображения камер с высоким временным разрешением содержали множество световых указателей в геометрическом порядке световых указателей,
причем блок управления дополнительно выполнен с возможностью определения с высоким временным разрешением, в качестве данных о движении, пространственного размера геометрического порядка, соответствующего множеству световых указателей, и блок управления откалиброван таким образом, что каждому пространственному размеру геометрического порядка, соответствующего световым указателям, назначается соответствующее осевое смещение глаза по отношению к аппарату.
2. Аппарат по п.1, отличающийся тем, что аппарат дополнительно содержит блок определения контура роговицы, выполненный с возможностью определять значения кривизны, отражающие кривизну наружной поверхности роговицы глаза.
3. Аппарат по п.1, отличающийся тем, что блок управления дополнительно выполнен с возможностью определения значений кривизны из изображений ОКТ, при этом значения кривизны представляют кривизну наружной поверхности роговицы глаза.
4. Аппарат по п.1, отличающийся тем, что блок управления дополнительно выполнен с возможностью определения, в качестве данных о движении, пространственного положения опорной точки с высоким временным разрешением, при этом опорная точка является по меньшей мере одной из следующих:
центром геометрического порядка, соответствующего зрачку глаза и/или наружному краю радужной оболочки глаза; и
центром кругового порядка, соответствующего световым указателям.
5. Аппарат по п.1, отличающийся тем, что блок управления дополнительно выполнен с возможностью определения с высоким временным разрешением, в качестве данных о движении, пространственного положения особенности глаза, причем особенность - это детализированная характеристика радужной оболочки глаза или структуры сосудов в склере глаза.
6. Аппарат по п.1, отличающийся тем, что система камер выполнена с возможностью захвата изображений камер с высоким временным разрешением со скоростью визуализации камеры, и блок получения изображений ОКТ выполнен с возможностью получения изображений ОКТ с высоким временным разрешением со скоростью отображения изображений ОКТ, и скорость отображения изображений камеры по существу равна скорости отображения изображений ОКТ, или скорость отображения изображений камеры выше, чем скорость отображения изображений ОКТ, или скорость отображения изображений камеры ниже, чем скорость отображения изображений ОКТ.
7. Аппарат по п.1, отличающийся тем, что система камер содержит только одну камеру.
8. Способ оптической когерентной томографии (ОКТ) глаза, содержащий этапы:
захвата изображений глаза с камеры с высоким временным разрешением, используя систему камер;
получения изображения ОКТ глаза с высоким временным разрешением, используя блок получения изображения ОКТ, причем измерительная ось блока получения изображений ОКТ и измерительные оси системы камер выровнены вдоль общей измерительной оси аппарата, используя расщепитель луча;
освещение роговицы глаза с использованием множества точечных источников света, расположенных в геометрическом порядке точечных источников света вокруг измерительной оси так, чтобы изображения камер с высоким временным разрешением содержали множество световых указателей в геометрическом порядке световых указателей;
определения по изображениям камер с высоким временным разрешением данных о движении с высоким временным разрешением, представляющих движение глаза относительно измерительной оси, с использованием блока управления;
определения с высоким временным разрешением, в качестве данных о движении, пространственного размера геометрического порядка, соответствующего множеству световых указателей, с использованием блока управления;
назначения каждому пространственному размеру геометрического порядка, соответствующего световым указателям, соответствующего осевого смещения глаза по отношению к аппарату, с использованием блока управления;
преобразования по меньшей мере части изображений ОКТ на основе данных о движении, с использованием блока управления; и
генерирования томограммы глаза из изображений OКT, с использованием блока управления.
9. Способ по п.8, дополнительно содержащий:
определение значений кривизны, отражающих кривизну наружной поверхности роговицы глаза, с использованием блока определения контура роговицы.
10. Способ по п.8, дополнительно содержащий:
определение из изображений ОКТ значений кривизны, отражающих кривизну наружной поверхности роговицы глаза, с использованием блока управления.
11. Способ по п.8, дополнительно содержащий:
определение, в качестве данных о движении, пространственного положения опорной точки с высоким временным разрешением, при этом опорная точка является по меньшей мере одной из следующих:
центром геометрического порядка, соответствующего зрачку глаза и/или наружному краю радужной оболочки глаза; и
центром кругового порядка, соответствующего световым указателям, с использованием блока управления.
12. Способ по п.8, дополнительно содержащий:
определение с высоким временным разрешением, в качестве данных о движении, положения особенности глаза, причем особенность - это детализированная характеристика радужной оболочки глаза или структуры сосудов в склере глаза, используя блок управления.
13. Способ по п.8, дополнительно содержащий:
захват изображений камер с высоким временным разрешением со скоростью отображения изображений камеры и получение изображений ОКТ с высоким временным разрешением со скоростью отображения изображений ОКТ, причем скорость отображения изображений камеры является одним из следующего: равна скорости отображения изображений ОКТ, выше, чем скорость отображения изображений ОКТ, или ниже, чем скорость отображения изображений ОКТ.
| US 20120140174 A1, 07.06.2012 | |||
| US 20120229762 A1, 13.09.2012 | |||
| US 20120200824 A1, 09.08.2012 | |||
| US 20120083667 A1, 05.04.2012 | |||
| JP 2008104628 A, 08.05.2008 | |||
| US 20110267340 A1, 03.11.2011 | |||
| US 20120274783 A1, 01.11.2012 | |||
| US 20080055543 A1, 06.03.2008 | |||
| RU 2010144403 A, 20.05.2012. |

