Изобретение относится к строительству, а более конкретно к способам управляемой проходки скважин без выемки грунта, и может быть использовано для проходки наклонных и горизонтальных скважин и бестраншейной прокладки коммуникаций под землей, в частности под дорогами, водоемами, зданиями.
Уровень техники, относящийся к заявляемому изобретению - способу управляемой проходки скважины без выемки грунта, характеризуется следующими известными решениями:
- техническое решение по патенту US 2124414 «Долото для бурения скважин» (Well drilling bit) от 18.04.1936 г.;
- техническое решение по патенту US 3354969 «Самоходная буровая установка» (Self-propelled drilling machine) от 25.09.1963 г.;
- техническое решение по патенту US 3926267 « Устройство для проходки скважин в грунте» (Device for driving holes in the ground) от 31.07.1974 г. E21B 4/18; E21B 7/24; E21B 7/26; (IPC1-7): E21B 11/02;
- техническое решение по авторскому свидетельству СССР 717235 «Устройство для раскатки скважин в грунте» от 04.03.1976 г.;
- техническое решение по патенту US 4085808 «Самоходное и самофиксирующееся устройство для перемещения в каналах и вытянутых конструкциях» (Self-driving and self-locking device for traversing channels and elongated structures) от 28.01.1977 г.;
- техническое решение по авторскому свидетельству СССР 985206 «Устройство для раскатки скважин в грунте» от 21.04.1981 г.;
- техническое решение по патенту РФ 2292437 «Способ и устройство для бурения вытеснением грунта» от 20.09.2004 г.;
- техническое решение по патенту РФ 2383687 «Раскатчик для образования скважин в грунте» от 14.11.2008 г.
При проходке скважины методом раскатки без выемки грунта вращение рабочего органа, как правило, представляющего из себя вал с эксцентриками и имеющего конусообразную форму с увеличивающимся диаметром к заднему концу, приводит к постепенному раздвижению и уплотнению грунта скважины в радиальном направлении от ее оси. Передача вращения на рабочий орган может осуществляться с поверхности от устья скважины, например через набор бурильных труб, или двигателем, расположенным за рабочим органом и образующим с рабочим органом единое устройство. Прямое и обратное движение вдоль оси скважины может осуществляться за счет передачи усилия через бурильные трубы, за счет обеспечения устройства с рабочим органом движителем или за счет геометрии рабочего органа, обеспечивающей одновременно с уплотнением грунта ввинчивание в него при вращении рабочего органа и возможно вывинчивание рабочего органа из грунта при реверсе вращения. В результате применения метода раскатки образуется скважина с уплотненными относительно ровными стенками. Достоинствами метода являются относительно низкая энергоемкость и стоимость, низкие трудозатраты, компактность оборудования, простота конструкции и повышенный срок службы рабочего органа, возможность использования для бестраншейной прокладки коммуникаций.
В патенте US 2124414 «Долото для бурения скважин» описано долото-раскатчик, с помощью которого может быть реализован способ проходки скважин в грунте, при котором скважину образуют вращением долота-раскатчика, приводимого во вращение внешней установкой через бурильные трубы.
В патенте US 3354969 «Самоходная буровая установка» описана установка, с помощью которой может быть реализован способ проходки скважин в грунте, при котором скважину образуют самоходным устройством, содержащим корпус, рабочий орган, движитель, направляющие стабилизаторы, установленные на корпусе. При реализации данного способа вращающийся рабочий орган устройства врезается в грунт и раздвигает его, причем реактивный вращению рабочего органа момент создается движителем, выполненным в виде колес с насечками, и направляющими стабилизаторами, движитель обеспечивает также продольное усилие для движения устройства, рабочий орган и движитель приводятся в движение электродвигателем, расположенным в корпусе устройства.
В патенте US 3926267 «Устройство для проходки скважин в грунте» описано устройство, с помощью которого может быть реализован способ проходки скважин в грунте, при котором скважина образуется методом раскатки самоходным устройством, содержащим корпус и рабочий орган, причем рабочий орган представляет собой коленчатый вал, на переднем конце которого расположен конический элемент, а за ним набор конических поперечных роликов, образующих конусообразное тело, при этом ролики расположены под таким углом к продольной оси устройства, который обеспечивает при вращении рабочего органа ввинчивание его в грунт, а при реверсе вращения - вывинчивание из грунта, момент от вращения рабочего органа компенсируется направляющими стабилизаторами на корпусе устройства или колесами. Вращение рабочего органа обеспечивается электродвигателем, расположенным в корпусе, питание к которому подводится по кабелю с поверхности от устья скважины.
В авторском свидетельстве СССР 717235 «Устройство для раскатки скважин в грунте» описано устройство, с помощью которого может быть реализован способ проходки скважин в грунте, при котором скважину образуют самоходным устройством, содержащим корпус с приводом рабочего органа - электродвигателем и конусообразный рабочий орган с катками, представляющий собой эксцентриковый вал и катки, соединенные с помощью зубчатых колес с валом ротора электродвигателя, причем при приведении в движение катков они начинают вращаться относительно эксцентрикового вала, вращая его в свою очередь в противоположную сторону, при этом катки обкатываются по своим забоям, формируя скважину и, вследствие своего разворота, осуществляют прямую подачу всего устройства за счет создания осевого усилия для проходки скважины рабочим органом при его вращении приводом. Включение электродвигателя в другую сторону приводит к реверсу устройства, позволяя осуществить движение назад, например, для вывода устройства из глухих скважин. Описанное в авторском свидетельстве устройство может быть введено и выведено из грунта при образовании скважин без вспомогательных приспособлений.
К недостаткам известного способа можно отнести невозможность образования скважины с необходимой траекторией, отличной от прямолинейной, невозможность изменения траектории скважины во время ее образования, возможность применения способа в малом количестве типов грунтов, а также не достаточную надежность по причине возможного застревания устройства в определенных типах грунтов и вращения рабочего органа с проскальзыванием в скважине.
В патенте US 4085808 «Самоходное и самофиксирующееся устройство для перемещения в каналах и вытянутых конструкциях» описано устройство, с помощью которого может быть реализован способ проходки скважин в грунте, при котором скважину образуют самоходным и самофиксирующимся устройством, содержащим раму, буровой рабочий орган, гусеничный привод, установленный на раме, расположенный снаружи устройства, обладающий возможностью регулировки по отношению к продольной оси устройства, чтобы обеспечить прижим к стенке скважины, для движения устройства в скважине в нужном направлении.
В авторском свидетельстве СССР 985206 «Устройство для раскатки скважин в грунте» описано устройство, с помощью которого может быть реализован способ проходки скважин в грунте, при котором скважину образуют самоходным устройством, содержащим корпус с электродвигателем и рабочий орган, аналогично, как с использованием решения по авторскому свидетельству СССР 717235.
В патенте РФ 2292437 «Способ и устройство для бурения вытеснением грунта» описан способ проходки скважин в грунте с помощью бурового устройства с вытесняющей головкой, на боковой поверхности которой выполнена винтовая спираль, благодаря которой вытесняющая головка завинчивается в грунт с обеспечением особенно хорошего вытесняющего воздействия.
В патенте РФ 2383687 «Раскатчик для образования скважин в грунте» описано устройство, с помощью которого может быть реализован способ проходки скважин в грунте, при котором скважину образуют раскатчиком с коническими катками, на который передается вращение и осевая подача от внешнего устройства, например, через бурильные трубы, при этом конические катки ввертываются в грунт, образуя скважину. Снаружи на катках раскатчика чередуются кольцевые канавки, обеспечивающие самозавинчивание катков в грунт, и накатка, обеспечивающая улучшение сцепления катков с грунтом для предотвращения их радиального проскальзывания.
Кроме этого из статьи «Прокладка подземных трубопроводов методами прокола и продавливания» на сайте «Инженерная защита. Библиотека инженера-геодезиста» (сайт https://injzashita.com/prokladka-podzemnix-truboprovodov-metodami-prokola-i-prodavlivaniya.html) известны характеристики способов проходки скважин, с помощью которых может быть реализована бестраншейная прокладка коммуникаций:
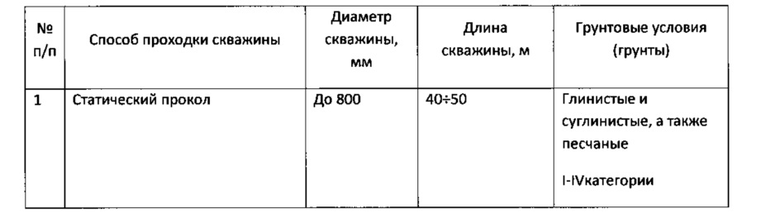
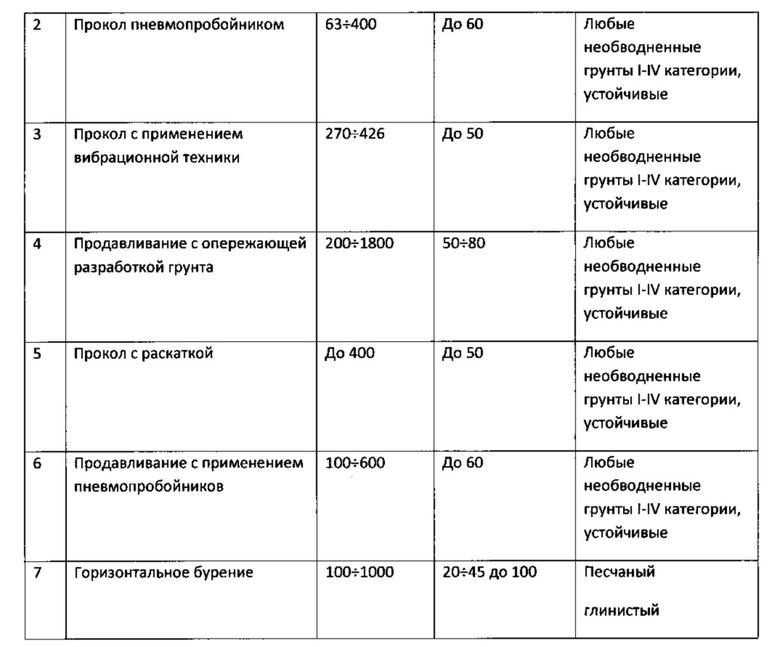
Во всех указанных в таблице способах перемещение рабочего органа (инструмента) (фрезы, конусной головки, раскатных роликов) при проходке скважины осуществляется за счет давления на них внешних, толкающих инструмент по оси скважины устройств в виде домкратов, ударно-штанговых устройств, ударно-канатных устройств, ударно-вращательных устройств.
По представленным данным видно, что длина образуемой перечисленными способами скважины не превышает 100 метров, а в среднем составляет порядка 60 метров. Это связано со способами передачи энергии к рабочему органу с поверхности. Чаще всего используются бурильные трубы определенной длины, соединяемые в колонну, через которую передается вращательное и/или поступательное усилие. Кроме этого перечисленные способы не обладают возможностью образования скважины со сложной криволинейной траекторией. Недостатком можно назвать и необходимость наличия стартового и завершающего котлованов для образования горизонтальной иди криволинейной скважины, что значительно увеличивает трудозатраты и стоимость работ.
В качестве прототипа заявленного изобретения выбран способ, реализуемый устройством по авторскому свидетельству СССР 717235 «Устройство для раскатки скважин в грунте», как наиболее близкий по совокупности существенных признаков.
Целями заявленного изобретения - способа управляемой проходки скважины без выемки грунта, являются:
- обеспечение возможности проходки скважины большой длины с необходимой, в том числе криволинейной, траекторией,
- обеспечение возможности управления траекторией скважины во время ее проходки,
- расширение применения способа в различных типах грунтов,
- повышение надежности и технологичности способа.
Указанные цели достигаются заявленным изобретением за счет того, что в способе управляемой проходки скважин без выемки грунта, при котором скважину образуют самоходным устройством, содержащим конусообразный рабочий орган с катками, которыми уплотняют грунт, и привод для вращения рабочего органа, установленный в корпусе устройства, причем осевое усилие для проходки скважины создают рабочим органом при его вращении приводом, согласно изобретению рабочий орган ввинчивается и одновременно уплотняет грунт при вращении за счет того, что катки рабочего органа расположены вдоль винтовой линии с равным шагом на образующей конусообразной поверхности рабочего органа и представляют собой ролики, торцы которых выступают за образующую поверхность рабочего органа, а их оси вращения перпендикулярны винтовой линии, кроме того, дополнительное осевое усилие создают за счет, по меньшей мере, трех гусеничных движителей, установленных на периферии корпуса устройства вдоль его оси и имеющих отдельные приводы для обеспечения осевого перемещения устройства, при этом гусеничные движители имеют отдельные приводы регулируемого радиального перемещения для обеспечения регулируемого прижима гусеничных движителей к стенке скважины, который обеспечивает компенсацию реактивного момента, возникающего при вращении рабочего органа, при этом управление движением устройства по необходимой траектории скважины осуществляют за счет управления работой приводов гусеничных движителей, приводов радиального перемещения гусеничных движителей и привода рабочего органа, а контроль движения устройства по необходимой траектории скважины осуществляют с помощь модуля навигации устройства, позволяющего определять расположение устройства под землей.
В частных случаях реализации изобретения управление движением устройства по необходимой траектории скважины осуществляют с пульта управления либо запрограммированным модулем управления устройства. Причем при любом из вариантов управления контроль движения устройства по необходимой траектории скважины осуществляют с помощь модуля навигации устройства.
В частных случаях реализации способа при проходке скважины с уплотнением грунта предварительно выполняют его разрыхление или бурение посредством рабочего органа устройства, имеющего соответственно разрыхляющую или буровую переднюю часть.
Обеспечение возможности проходки скважины с необходимой, в том числе криволинейной, траекторией, достигается предложенным способом за счет проходки скважины устройством, имеющим гусеничные движители с отдельными приводами и отдельные приводы радиального перемещения гусеничных движителей, управление которыми позволяет направлять устройство по необходимой траектории скважины. При этом длина скважины ограничивается только средствами, обеспечивающими подвод энергии к устройству, что позволяет проходить скважину сравнительно большой длины по сравнению с максимальными длинами скважин, проходимых известными аналогами при проходке без выемки грунта.
Обеспечение возможности управления траекторией скважины во время ее проходки достигается предложенным способом за счет управления движением устройства посредством управления работой приводов гусеничных движителей, приводов радиального перемещения гусеничных движителей и привода рабочего органа.
Расширение применения способа в различных типах грунтов достигается предложенным способом за счет создания дополнительного осевого усилия при проходке скважины за счет гусеничных движителей устройства, что позволяет осуществлять проходку скважины в плотных грунтах.
Повышение надежности и технологичности способа достигается за счет создания большего осевого усилия благодаря использованию двух видов движителей (рабочего органа, ввинчивающегося в грунт при вращении, и гусеничных движителей), причем гусеничные движители опираются на уже уплотненную рабочим органом стенку скважины, что повышает надежность их сцепления с ней и снижает возможности проскальзывания, а также способствует дополнительному уплотнению стенки скважины. При проскальзывании рабочего органа в грунте скважины и снижении либо отсутствии движения устройства по траектории скважины необходимое осевое усилие создают гусеничными движителями, которые прижимают к уплотненной стенке скважины с помощью приводов радиального перемещения гусеничных движителей. Кроме этого катки рабочего органа, расположенные вдоль винтовой линии с равным шагом на образующей конусообразной поверхности рабочего органа и выступающие за нее, обеспечивают надежное ввинчивание рабочего органа в грунт с одновременным его уплотнением и формированием стенки скважины, а уплотнение грунта катками в виде роликов снижает трение катков об уплотняемый грунт, причем при одном направлении вращения рабочего органа осуществляется его ввинчивание в грунт, а при обратном - вывинчивание из грунта.
В качестве приводов рабочего органа, гусеничных движителей, приводов радиального перемещения гусеничных движителей могут использоваться любые из известных видов приводов, например, гидромоторы и гидроприводы, электроприводы и другие.
Наиболее удобный вариант расположения гусеничных движителей - на периферии корпуса устройства вдоль его оси, равноудаленно друг от друга.
Обеспечение устройства энергией (питанием) для проходки скважины может быть выполнено любым известным способом, например, путем подвода электроэнергии по кабелю, путем питания устройства от аккумулятора, расположенного в устройстве, и другими способами.
Кабель подвода энергии к устройству может быть выполнен наращиваемым. Кроме этого при выполнении проходки к устройству может быть подсоединен страховочный трос, для возврата устройства на поверхность в случае его неисправности или невозможности проходки скважины.
Для контроля траектории скважины во время ее проходки могут быть использованы системы определения положения устройства под землей аналогичные известным, например, таким, как локационная система горизонтально направленного бурения SNS200-PRO (описанная в руководстве по эксплуатации, доступном по ссылке в Интернет: http://sense-inc.ru/assets/templates/sense/doc/SNS200-PRO.pdf) или другие системы подобного назначения. Система SNS200-PRO реализуется радио зондом, располагаемом в устройстве, наземным приемником, пультом управления устройством. С помощью наземного приемника определяют положение зонда, расположенного в устройстве под землей, и передают полученные данные на пульт управления устройством и/или в запрограммированный модуль управления устройства. Для увеличения дальности действия системы могут быть применены ретрансляторы.
При контроле траектории скважины сравнивают траекторию движения устройства под землей с необходимой траекторией скважины и, при возникновении отклонений, корректируют направление движения устройства за счет управления работой рабочего органа, гусеничных движителей и положения гусеничных движителей. При этом управление движением устройства под землей может осуществляться вручную с пульта управления или автоматически запрограммированным модулем управления устройства.
Поскольку при вращении рабочего органа стенка скважины формируется из уплотненного грунта, для гусеничных движителей обеспечивается надежная опора. Таким образом, обеспечивается надежный упор гусеничных движителей на уплотненную стенку скважины, что позволяет создать реактивный момент вращению рабочего органа и создавать осевое усилие при движении вперед и обратно вдоль скважины.
Рабочий орган имеет конусообразную форму с диаметром, увеличивающимся от переднего к заднему концу, причем задний конец имеет диаметр равный или близкий к диаметру корпуса устройства.
При работе устройства в области между катками, расположенными вдоль винтовой линии, проходящей по образующей поверхности рабочего органа, грунт соприкасается с образующей поверхностью конусообразного рабочего органа и уплотняется ей.
Катки могут быть выполнены в виде роликов цилиндрической или иной формы.
В частном случае реализации способа при проходке скважины с уплотнением грунта предварительно выполняют его разрыхление или бурение посредством рабочего органа устройства, имеющего соответственно разрыхляющую или буровую переднюю часть.
В частном случае при штатном режиме проходки скважины скорость вращения гусениц соответствует скорости ввинчивания рабочего органа в грунт, что обеспечивает проходку скважины устройством без проскальзывания (буксования) движителей и сохранение целостности уплотненной стенки скважины.
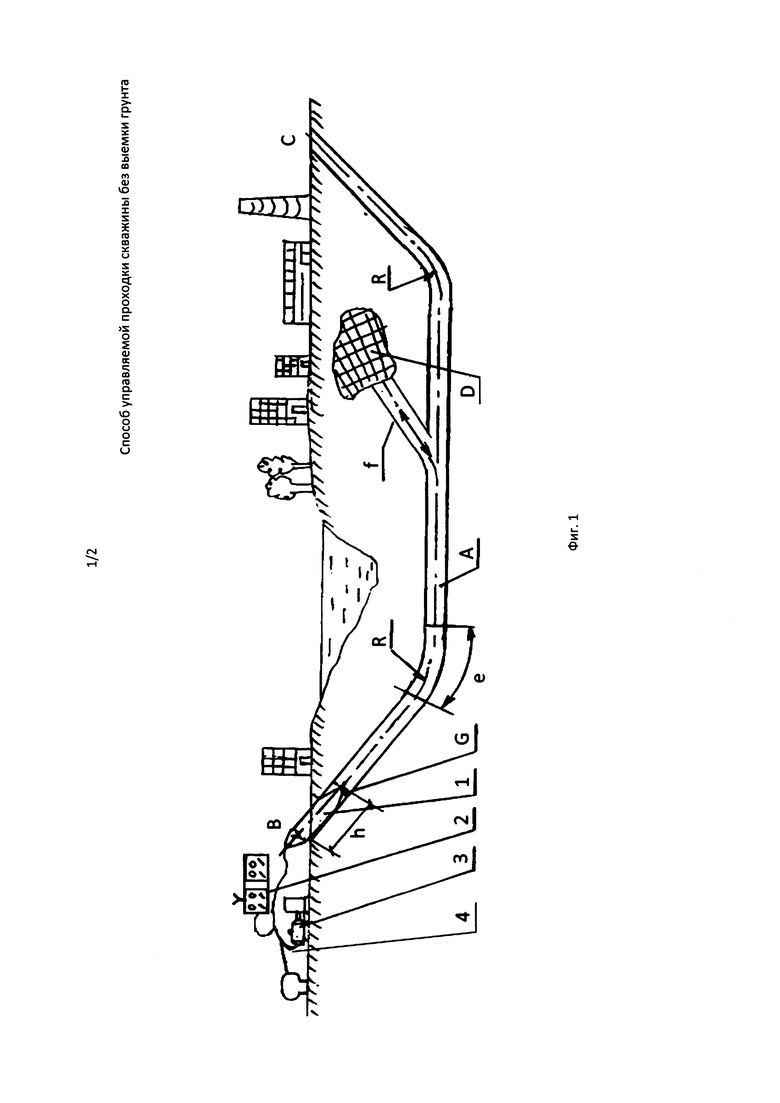
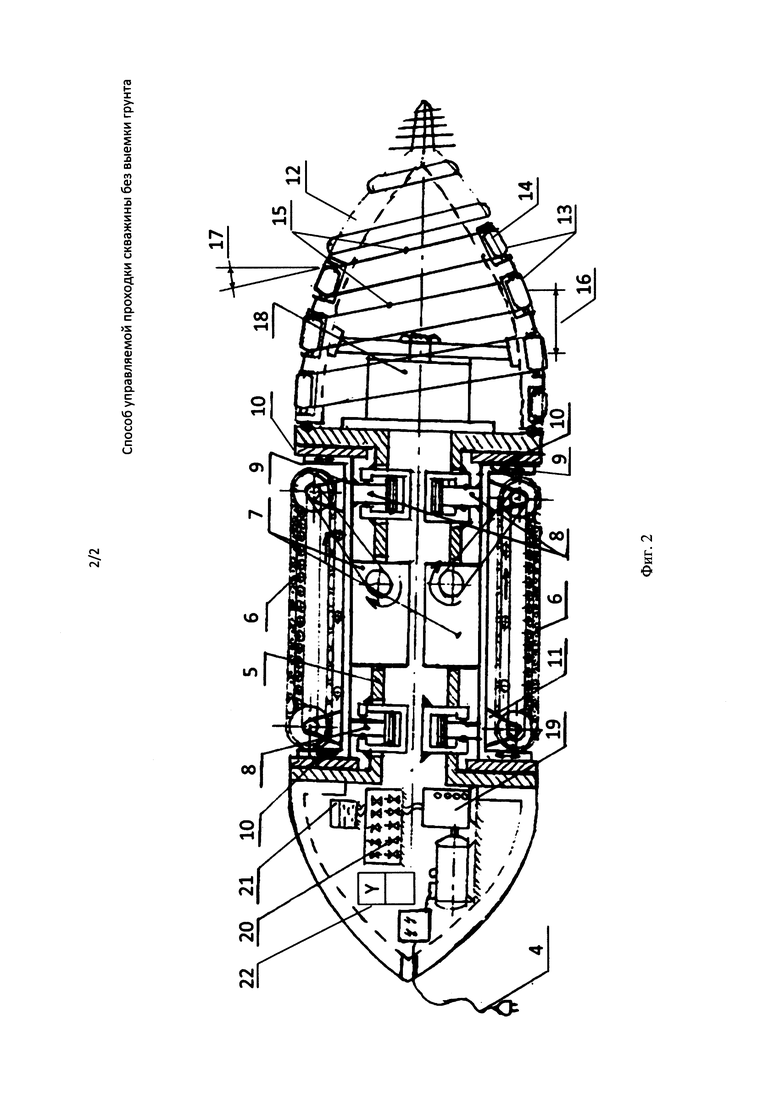
Сущность изобретения поясняется рисунками, изображающими частный случай реализации предложенного способа: Фиг. 1, на котором схематично изображена криволинейная скважина, проходка которой выполнена по предложенному способу, и Фиг. 2, на котором схематично изображено устройство с рабочим органом, которым выполнена проходка скважины.
На Фиг. 1 и Фиг. 2 выполнены следующие обозначения:
А - скважина;
В - начальная точка скважины;
С - конечная точка скважины;
D - препятствие в грунте;
е - криволинейный участок скважины;
f - участок скважины с препятствием в грунте;
R - радиус изгибов скважины;
G - стартовый приямок (начальная выемка в грунте);
h - глубина стартового приямка;
1 - устройство для проходки скважины;
2 - пульт управления;
3 - электрогенератор;
4 - кабель;
5 - корпус устройства;
6 - гусеничные движители;
7 - гидроприводы гусеничных движителей;
8 - гидроприводы радиального перемещения гусеничных движителей;
9 - каретки гусеничных движителей;
10 - направляющие радиального перемещения гусеничных движителей;
11 - опоры гусеничных движителей;
12 - рабочий орган;
13 - катки рабочего органа, выполненные в виде роликов;
14 - ось ролика;
15 - винтовая линия, вдоль которой расположены ролики;
16 - шаг винтовой линии;
17 - угол шага винтовой линии;
18 - привод рабочего органа;
19 - насосная гидростанция устройства с электроприводом;
20 - блок управления насосной станции;
21 - расширительный бачок насосной станции;
22 - модуль навигации
В частном случае реализации предложенного изобретения - способа управляемой проходки скважины без выемки грунта, для проходки скважины А размещают устройство 1 в стартовом приямке (начальной выемке грунта) в начальной точке В скважины А, имеющего глубину h, определяемую расстоянием от переднего конца устройства до конца гусеничных движителей, и диаметр, равный наружному диаметру устройства 1, при этом необходимая траектория скважины имеет криволинейные участки, например участок е с радиусом кривизны R, и конечную точку скважины С, к устройству 1 подводят электроэнергию от бензинового электрогенератора 3 по кабелю 4, кроме этого по кабелю 4 осуществляется двусторонняя передача данных от пульта управления 2 к устройству 1.
Устройство 1, содержащее корпус 5, конусообразный рабочий орган 12, четыре гусеничных движителя 6, расположенных по схеме «верх-низ-лево-право». Данное расположение гусеничных движителей 6 позволяет изменять направление движения устройства вверх, вниз, влево и вправо и является наиболее простой и удобной для управления устройством в ручном управлении с пульта 2.
Конусообразный рабочий орган 12 имеет катки 14, выполненные в виде роликов, расположенных вдоль винтовой линии 15 с равным шагом 16 и углом 17 на образующей конусообразной поверхности рабочего органа 12, при этом торцы роликов выступают за образующую поверхность рабочего органа 12, а их оси вращения 14 перпендикулярны винтовой линии и расположены в плоскости параллельной касательной к образующей поверхности конусообразной поверхности рабочего органа 12 в точке расположения ролика, причем рабочий орган 12 выполнен полым, а внутри него расположен привод 18, обеспечивающий вращение рабочего органа 12.
Гусеничные движители 6 имеют приводы 7, а также приводы радиального перемещения 8, от которых усилие передается через каретки 9, перемещающиеся по направляющим 10, на опоры 11 гусеничных движителей 6, за счет чего осуществляется их прижим к стенке скважины А.
В рассматриваемом случае приводы 18, 7 выполнены в виде гидромоторов, а приводы 8 - в виде гидроцилиндров и работают от гидростанции 19, имеющей блок управления насосной станцией 20, расширительный бачок 21, систему трубопроводов (на рисунке не показана), и питающейся от электричества, подаваемого по кабелю 4.
Управление работой устройства 1 осуществляется путем управления работой приводов 18, 7, 8 с пульта управления 2 через блок управления насосной станцией 20. Контроль проходки скважины А по необходимой траектории и с заданной скоростью осуществляют путем контроля положения устройства 1 под землей. Для определения положения устройства под землей, оно снабжено модулем навигации 22, передающим данные на пульт управления 2.
При проходке скважины А на устройство 1 подают питание от электрогенератора 3 и устанавливают связь между пультом управления 2 и устройством 1 через кабель 4, после чего, осуществляя управление приводами 18, 8, 7 устройства 1 с пульта управления 2, сначала прижимают гусеничные движители 6 к стенке стартового приямка G - началу скважины А, затем включают вращение рабочего органа 12 на ввинчивание и гусеничные приводы 6, которые совместно создают продольное осевое усилие, кроме этого прижим гусеничных движителей 6 к стенке скважины А обеспечивает компенсацию реактивного момента от вращения рабочего органа 12. Ввинчивание рабочего органа 12 в грунт с одновременным его уплотнением в радиальном направлении при вращении осуществляется благодаря расположению катков 13 вдоль винтовой линии 15 с равным шагом 16 и углом 17, проходящей по образующей поверхности конусообразной рабочего органа 12. Таким образом, грунт уплотняется при контакте с катками 13 и поверхностью конусообразного рабочего органа 12 с образованием плотной стенки скважины А на которую в последствии опираются гусеничные движители 6, создающие дополнительное осевое усилие вдоль траектории скважины А и за счет прижима компенсирующие реактивный момент от вращения рабочего органа 12.
В штатном режиме проходки скважины устройство 1 движется в грунте с заданной скоростью, при этом линейную скорость от вращения и ввинчивания рабочего органа 12 в грунт и линейную скорость гусеничных движителей 6 поддерживают одинаковыми.
Проходку криволинейного участка е скважины А осуществляют за счет управления работой четырех гусеничных движителей 6 и их радиального перемещения. При этом скорость движения движителя 6, расположенного ближе к внутреннему радиусу поворота, снижают по отношению к скорости движения движителя 6, расположенного ближе к внешнему радиусу поворота, а скорости движителей выбирают так, чтобы пройти поворот траектории скважины А с необходимым радиусом кривизны R.
При проходке участка f скважины А с препятствием D, которое не может быть преодолено устройством 1 с рабочим органом 12, по отсутствию перемещения устройства 1 под землей определяют наличие препятствия, при этом возвращают устройство 1 путем включения движения в обратную сторону гусеничных движителей 6 и рабочего органа 12 на необходимое расстояние вдоль по скважине А и осуществляют корректировку траектории для обхода непреодолимого препятствия D. После чего осуществляют проходку скважины А до ее конечной точки С и вывод устройства 1 на поверхность.
Контроль положения устройства 1 осуществляют с помощью модуля навигации 22, позволяющего определить точное расположение устройства 1 под землей, например, за счет реализации системы аналогичной известной SNS200-PRO, при использовании которой модуль навигации 22 представляет собой зонд установленный в устройстве. Расположение зонда определяют наземным приемником, полученные данные передают на пульт управления 2. По расположению зонда определяют положение устройства под землей и осуществляют контроль движения устройства 1 вдоль необходимой траектории скважины А.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОХОДКИ СКВАЖИНЫ БЕЗ ВЫЕМКИ ГРУНТА | 2017 |
|
RU2668119C1 |
| УСТРОЙСТВО ДЛЯ ПРОХОДКИ СКВАЖИНЫ БЕЗ ВЫЕМКИ ГРУНТА | 2020 |
|
RU2757612C2 |
| РАСКАТЫВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ БУРОНАБИВНЫХ СВАЙ | 1993 |
|
RU2080442C1 |
| РАСКАТЧИК ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2008 |
|
RU2383687C1 |
| РАСКАТЧИК ДЛЯ ИЗГОТОВЛЕНИЯ НАБИВНЫХ СВАЙ | 2011 |
|
RU2465409C1 |
| УСТРОЙСТВО ДЛЯ ПРОХОДКИ СКВАЖИН И РАСШИРЕНИЯ СУЩЕСТВУЮЩИХ ОТВЕРСТИЙ | 2003 |
|
RU2238371C1 |
| Установка для бестраншейной прокладки коммуникаций, раскатчики для образования и расширения скважин, приспособление для центрирования вала раскатчика с приводной штангой | 2002 |
|
RU2221128C1 |
| РАСКАТЧИК ДЛЯ ОБРАЗОВАНИЯ ЛИДЕРНОЙ СКВАЖИНЫ В ГРУНТЕ | 2008 |
|
RU2379429C1 |
| КОТЛОВАННАЯ МАШИНА | 2011 |
|
RU2485253C1 |
| СПОСОБ УСИЛЕНИЯ ОСНОВАНИЙ ФУНДАМЕНТОВ ЗДАНИЙ И ОСНОВАНИЙ СООРУЖЕНИЙ | 2001 |
|
RU2183704C1 |
Изобретение относится к строительству, а более конкретно к способам управляемой проходки скважин без выемки грунта, и может быть использовано для проходки наклонных и горизонтальных скважин и бестраншейной прокладки коммуникаций под землей, в частности под дорогами, водоемами, зданиями. Способ управляемой проходки скважины без выемки грунта, при котором скважину образуют самоходным устройством, содержащим конусообразный рабочий орган с катками, которыми уплотняют грунт, и привод для вращения рабочего органа, установленный в корпусе устройства, причем осевое усилие для проходки скважины создают рабочим органом при его вращении приводом. При этом рабочий орган ввинчивается и одновременно уплотняет грунт при вращении за счет того, что катки рабочего органа расположены вдоль винтовой линии с равным шагом на образующей конусообразной поверхности рабочего органа и представляют собой ролики, торцы которых выступают за образующую поверхность рабочего органа, а их оси вращения перпендикулярны винтовой линии. Дополнительное осевое усилие создается за счет, по меньшей мере, трех гусеничных движителей, установленных на периферии корпуса устройства вдоль его оси и имеющих отдельные приводы для обеспечения осевого перемещения устройства. При этом гусеничные движители имеют отдельные приводы регулируемого радиального перемещения для обеспечения регулируемого прижима гусеничных движителей к стенке скважины, который обеспечивает компенсацию реактивного момента, возникающего при вращении рабочего органа. Управление движением устройства по необходимой траектории скважины осуществляют за счет управления работой приводов гусеничных движителей, приводов радиального перемещения гусеничных движителей и привода рабочего органа, а контроль движения устройства по необходимой траектории скважины осуществляют с помощь модуля навигации устройства, позволяющего определять расположение устройства под землей. Технический результат состоит в обеспечении возможности проходки скважины большой длины с необходимой, в том числе криволинейной, траекторией, в возможности управления траекторией скважины во время ее проходки, в расширении применения способа в различных типах грунтов, в повышении надежности и технологичности способа. 4 з.п. ф-лы, 3 ил.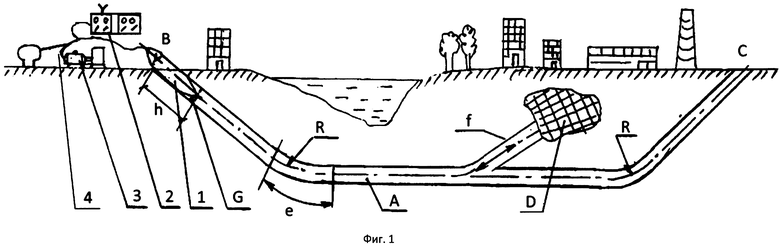
1. Способ управляемой проходки скважины без выемки грунта, при котором скважину образуют самоходным устройством, содержащим конусообразный рабочий орган с катками, которыми уплотняют грунт, и привод для вращения рабочего органа, установленный в корпусе устройства, причем осевое усилие для проходки скважины создают рабочим органом при его вращении приводом, отличающийся тем, что рабочий орган ввинчивается и одновременно уплотняет грунт при вращении за счет того, что катки рабочего органа расположены вдоль винтовой линии с равным шагом на образующей конусообразной поверхности рабочего органа и представляют собой ролики, торцы которых выступают за образующую поверхность рабочего органа, а их оси вращения перпендикулярны винтовой линии, кроме того, дополнительное осевое усилие создают за счет, по меньшей мере, трех гусеничных движителей, установленных на периферии корпуса устройства вдоль его оси и имеющих отдельные приводы для обеспечения осевого перемещения устройства, при этом гусеничные движители имеют отдельные приводы регулируемого радиального перемещения для обеспечения регулируемого прижима гусеничных движителей к стенке скважины, который обеспечивает компенсацию реактивного момента, возникающего при вращении рабочего органа, при этом управление движением устройства по необходимой траектории скважины осуществляют за счет управления работой приводов гусеничных движителей, приводов радиального перемещения гусеничных движителей и привода рабочего органа, а контроль движения устройства по необходимой траектории скважины осуществляют с помощью модуля навигации устройства, позволяющего определять расположение устройства под землей.
2. Способ управляемой проходки скважины без выемки грунта по п. 1, отличающийся тем, что управление движением устройства по необходимой траектории скважины осуществляют с пульта управления.
3. Способ управляемой проходки скважины без выемки грунта по п. 1, отличающийся тем, что управление движением устройства по необходимой траектории скважины осуществляют запрограммированным модулем управления устройства.
4. Способ управляемой проходки скважины без выемки грунта по любому из пп. 1-3, отличающийся тем, что при проходке скважины с уплотнением грунта предварительно выполняют его разрыхление посредством рабочего органа устройства, имеющего разрыхляющую переднюю часть.
5. Способ управляемой проходки скважины без выемки грунта по любому из пп. 1-3, отличающийся тем, что при проходке скважины с уплотнением грунта предварительно выполняют его бурение посредством рабочего органа устройства, имеющего буровую переднюю часть.
| СПОСОБ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ТРУБ | 2005 |
|
RU2392390C2 |
| Устройство для раскатки скважин в грунте | 1976 |
|
SU717235A1 |
| СПОСОБ БУРЕНИЯ ГОРИЗОНТАЛЬНЫХ И СЛАБОНАКЛОННЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2578081C1 |
| US 6250403 B1, 26.06.2001 | |||
| US 6244783 B1, 12.06.2001. | |||

