Область техники, к которой относится изобретение
Группа изобретений относится к способу контроля и проведения поверочных испытаний лазерных метеорологических времяпролетных дальномеров (облакомеров), применяемых для измерения высот различных слоев облачности, и к устройству, реализующему данный способ.
Уровень техники
Широко распространен способ поверки дальномерных блоков геодезического оборудования с использованием геодезических полигонов, сводящийся к измерению контрольных линий: расстояний до объектов, установленных на точно известных расстояниях (ГОСТ 8.503-84 ГСИ, ГОСТ 19223-90, ГКИНП (ГНТА) 17-195-99, ГОСТ Р ИСО 17123-4-2011). Контроль и поверка лазерных облакомеров происходит аналогичным образом, с той разницей, что излучение облакомера направляется в отражающую мишень с помощью дополнительной оптической системы, либо путем установки устройства в горизонтальном положении.
Недостатками такого способа являются сложности проведения испытаний, их дороговизна, длительный срок проведения, необходимость доставки поверяемого образца на сертифицированный геодезический полигон и ограниченная применимость к метрологическим системам метеорологического назначения. Кроме того, такой способ не позволяет проводить одновременно измерение расстояний до нескольких объектов на одной оси (имитация нескольких слоев облачности), в то время как в реальных условиях нередки ситуации наличия в атмосфере нескольких слоев облачности на разных высотах. В этом случае облакомер должен определить высоты всех или как минимум нескольких низших слоев облачности (в зависимости от плотности облачности).
Наиболее близким, принятым за прототип, является способ поверки дальномерного блока с помощью калиброванной оптоволоконной линии временной задержки, при котором оптическое волокно является эквивалентом установленной дистанции на геодезическом полигоне (Диссертация на соискание ученой степени кандидата технических наук: «Разработка методов метрологического контроля измерительных систем лазерного дальномера» - тема диссертации и автореферата по ВАК 05.11.01, кандидат технических наук Виноградов Никита Сергеевич).
Такой способ сводится к введению лазерного излучения дальномера в калиброванную оптоволоконную линию задержки и выводу его с другого конца в фотоприемник дальномерного блока. Поверка осуществляется при сравнении величины расстояния, полученного дальномером в ходе теста, с величиной эквивалента расстояния калиброванной оптоволоконной линии.
Недостаток этого способа заключается в том, что он имеет крайне ограниченное применение в метеорологических системах, т.к. обеспечивает измерение лишь одной дистанции; измерение нескольких дистанций требует использования множества калиброванных катушек, что, в свою очередь, сильно усложняет процесс и увеличивает стоимость проведения мероприятия. Также недостатком является невозможность измерения одновременно нескольких расстояний, что критично для облакомеров, способных фиксировать сразу несколько границ облачности на различных высотах, а также требующих контроля мертвой зоны и пространственного разрешения.
Раскрытие изобретения
Задачей данной группы изобретений является создание способа и устройства, обеспечивающих простоту и эффективность проведения поверки и контроля лидарного оборудования типа облакомер с высокой точностью, а также расширение функциональных возможностей способа и устройства.
Для решения поставленной задачи предложен способ контроля и поверки метеорологического лидарного устройства типа облакомер, в котором оптический зондирующий импульс поверяемого устройства вводят через приемную оптическую систему в оптоволоконную линию временной задержки калиброванной длины и выводят через передающую оптическую систему на фотоприемник поверяемого устройства. Заявленный способ отличается тем, что в оптоволоконной линии временной задержки производят разделение оптической энергии зондирующего импульса в пропорции, определяемой коэффициентами деления и объединения разветвителей и сумматоров, при этом часть энергии через оптическое волокно калиброванной длины направляют на фотоприемник поверяемого устройства через передающую оптическую систему приемопередающего блока, а другую часть оптической энергии направляют в замкнутую оптоволоконную линию временной задержки калиброванной длины, при этом за каждый циклический проход светового импульса осуществляют отведение части оптической энергии импульса и направление ее в оптическое волокно калиброванной длины на фотоприемник поверяемого устройства через передающую оптическую систему приемопередающего блока, причем время, прошедшее между моментом излучения оптического зондирующего импульса и моментами приходов оптических импульсов, сформированных в результате деления, на фотоприемник поверяемого устройства, определяют исходя из известной длины оптических волокон,
при этом посредством замкнутой оптоволоконной линии временной задержки калиброванной длины формируют последовательность затухающих оптических импульсов, отстоящих друг от друга на равные промежутки времени, определяемые ее длиной.
В предпочтительном варианте способа длину замкнутой оптоволоконной линии временной задержки калибруют таким образом, чтобы время распространения оптического импульса в ней соответствовало времени прямого и обратного распространения оптического импульса в атмосфере от поверяемого устройства до отражающего объекта, находящегося на заданной высоте H, при этом посредством циклического прохождения оптического импульса в ней осуществляют циклический отвод части энергии оптического импульса через равные промежутки времени, эквивалентные времени прямого и обратного распространения оптического импульса в атмосфере от устройства до объектов, находящихся на высоте N*H, где N равно количеству циклических проходов оптического импульса по замкнутой оптоволоконной линии калиброванной длины.
Предпочтительно длины всех оптических волокон кроме замкнутой оптоволоконной линии временной задержки калибруют таким образом, чтобы время выхода первого по счету оптического импульса соответствовало времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на границе мертвой зоны поверяемого устройства, а время выхода второго по счету оптического импульса соответствовало времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на расстоянии, превышающем мертвую зону устройства на величину пространственного разрешения устройства.
Также предложено устройство контроля и поверки метеорологического лидарного устройства типа облакомер, содержащее приемопередающий блок, включающий в себя приемный и передающий коллиматоры, коммутационный дуплексный оптоволоконный кабель калиброванной длины и оптический блок, включающий в себя оптоволоконную линию временной задержки калиброванной длины, намотанную на катушку. В отличие от прототипа устройство дополнительно содержит последовательно соединенные первый оптоволоконный сумматор, объединяющий два волокна в одно, первый оптоволоконный разветвитель, разделяющий волокно на два волокна, причем выходное плечо первого оптоволоконного разветвителя с наибольшим коэффициентом деления соединено с оптоволоконной линией временной задержки калиброванной длины, выход которой соединен с входным плечом первого оптоволоконного сумматора с наибольшим коэффициентом объединения, а входное плечо первого разветвителя с наименьшим коэффициентом объединения соединено с приемным коллиматором коммутационным дуплексным оптоволоконным кабелем и выходное плечо первого оптоволоконного разветвителя с наименьшим коэффициентом деления соединено с передающим коллиматором коммутационным дуплексным оптоволоконным кабелем,
при этом длины всех оптических волокон кроме оптоволоконной линии временной задержки калиброванной длины откалиброваны таким образом, что время выхода первого по счету оптического импульса соответствует времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на границе мертвой зоны поверяемого устройства,
а длина оптоволоконной линии временной задержки откалибрована таким образом, что времена выхода всех последующих оптических импульсов соответствуют временам прямого и обратного прохождения оптического импульса в атмосфере от поверяемого устройства до отражающих объектов, находящихся на высоте N*H, где N равно количеству циклических проходов оптического импульса по упомянутой линии.
В одном предпочтительном варианте устройство может дополнительно содержать первую малую оптоволоконную линию временной задержки калиброванной длины, второй оптоволоконный разветвитель, разделяющий волокно на два волокна, и второй оптоволоконный сумматор, объединяющий два волокна в одно, причем выходное плечо второго оптоволоконного разветвителя с наименьшим коэффициентом деления соединено с входным плечом второго оптоволоконного сумматора с наименьшим коэффициентом объединения через первую малую оптоволоконную линию временной задержки, выходное плечо второго оптоволоконного разветвителя с наибольшим коэффициентом деления соединено с входным плечом первого оптоволоконного сумматора с наименьшим коэффициентом объединения и выходное плечо первого оптоволоконного разветвителя с наименьшим коэффициентом деления соединено с входным плечом второго оптоволоконного сумматора с наибольшим коэффициентом объединения, а входное плечо второго разветвителя соединено с приемным коллиматором коммутационным дуплексным оптоволоконным кабелем и выходное плечо второго оптоволоконного сумматора соединено с передающим коллиматором коммутационным дуплексным оптоволоконным кабелем,
причем длины оптических волокон первой малой оптоволоконной линии временной задержки, второго оптоволоконного разветвителя и второго оптоволоконного сумматора откалиброваны таким образом, что время выхода первого по счету оптического импульса соответствует времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на границе мертвой зоны поверяемого устройства, а время выхода второго по счету оптического импульса соответствует времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на расстоянии, превышающем мертвую зону поверяемого устройства на величину пространственного разрешения поверяемого устройства.
В другом предпочтительном варианте устройство дополнительно содержит вторую малую оптоволоконную линию временной задержки калиброванной длины и третий оптоволоконный смеситель, смешивающий и разделяющий два волокна, причем один из входов третьего смесителя подключен к выходу первого оптоволоконного разветвителя с наименьшим коэффициентом деления, выход третьего смесителя подключен к входу второго оптоволоконного сумматора с наибольшим коэффициентом объединения, а свободный выход третьего смесителя замкнут на его свободный вход через вторую малую оптоволоконную линию временной задержки, причем длины оптических волокон третьего смесителя и второй малой оптоволоконной линии временной задержки откалиброваны таким образом, что время распространения оптического импульса в них соответствует времени прямого и обратного прохождения оптического импульса в атмосфере в пределах пространственного разрешения поверяемого устройства.
Устройство может дополнительно содержать по меньшей мере один регулируемый оптоволоконный аттенюатор, подключенный после выходного плеча первого оптоволоконного разветвителя с наименьшим коэффициентом деления.
Устройство также может дополнительно содержать по меньшей мере один регулируемый оптоволоконный аттенюатор и по меньшей мере один нерегулируемый оптоволоконный аттенюатор, установленные перед входом первого оптоволоконного сумматора с наибольшим коэффициентом объединения и/или после выхода второго оптоволоконного разветвителя с наименьшим коэффициентом деления и/или после выхода второго оптоволоконного сумматора.
Техническим результатом, достигаемым настоящей группой изобретений, является упрощение и процедуры проведения поверочных и контрольных мероприятий облакомеров и повышение её эффективности при сохранении высокой точности поверки и контроля.
Заявленный способ обеспечивает простоту и общую эффективность проведения поверочных и контрольных мероприятий облакомеров, при этом не требуется деинсталляция и транспортировка облакомера к месту проведения контрольных и поверочных мероприятий, т.к. они могут быть произведены непосредственно на месте эксплуатации. Кроме того, предложенный способ и устройство, реализующее способ, позволяют проводить контрольные и поверочные мероприятия с высокой точностью, обусловленной применением калиброванных оптоволоконных линий заданной длины. Точность временных задержек может быть сравнима или превосходить аналогичные устройства при использовании геодезических полигонов.
Здесь общая эффективность не только подразумевает проведение однократного измерения, покрывающего основные поверяемые характеристики облакомера (пространственное разрешение, мертвая зона, максимальная дистанция и промежуточные дистанции), но также включает, например, экономическую эффективность, обусловленную отсутствием издержек на деинсталляцию, транспортировку, монтаж, проведение испытаний на сертифицированном полигоне и/или с применением сертифицированных поверенных средств и др., а также уменьшением временных издержек и уменьшением общего времени простоя оборудования в связи с процедурами поверки и контроля.
Краткое описание чертежей
Сущность изобретения поясняется чертежами.
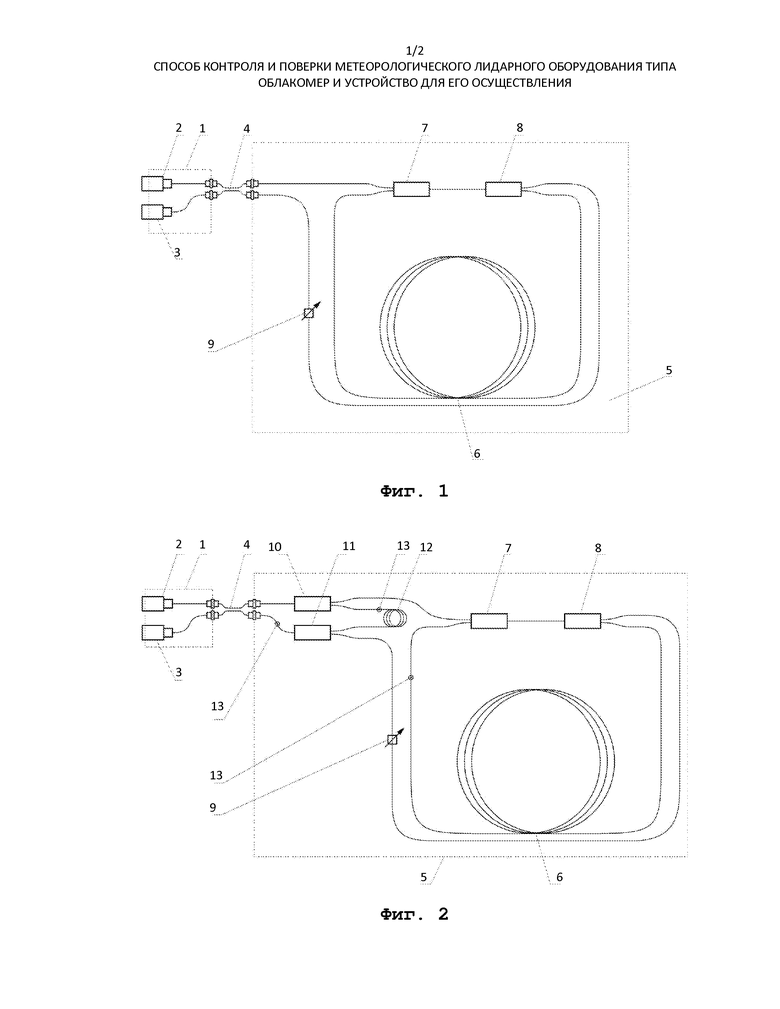
На Фиг. 1 показана базовая схема устройства, реализующая способ и обеспечивающая контроль мертвой зоны и дискретных отсчетов высотных измерений.
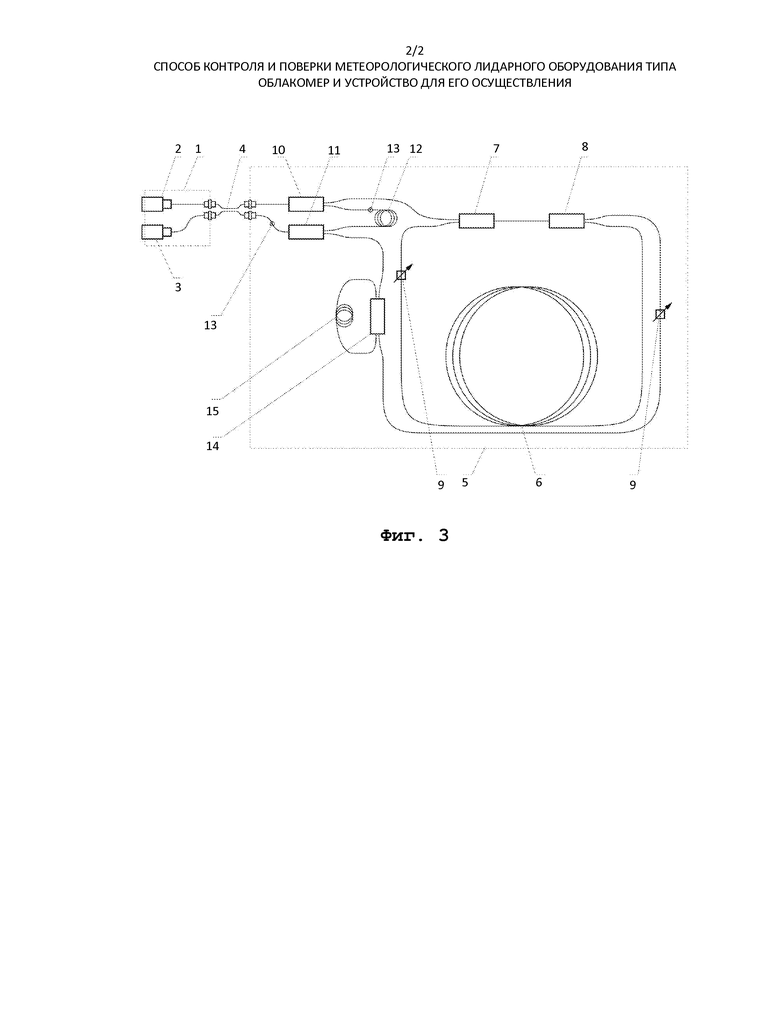
На Фиг. 2 показана схема устройства, реализующая способ и обеспечивающая контроль мертвой зоны, пространственного разрешения и дискретных отсчетов высотных измерений.
На Фиг. 3 показана схема устройства, реализующая способ и обеспечивающая контроль мертвой зоны, пространственного разрешения, дискретных отсчетов высотных измерений и пространственного разрешения на каждом дискретном отсчете высотных измерений.
Раскрытие изобретения
Сущность способа поясняется на примере базовой схемы устройства, реализующего способ, изображенной на Фиг.1.
На Фиг. 1. представлена базовая схема устройства, реализующая способ и обеспечивающая контроль мертвой зоны и дискретных отсчетов высотных измерений.
Устройство на Фиг. 1 содержит приемопередающий блок 1, включающий в себя приемный 2 и передающий коллиматоры 3, коммутационный дуплексный оптоволоконный кабель 4 калиброванной длины и оптический блок 5, включающий в себя оптоволоконную линию 6 временной задержки калиброванной длины, намотанную на катушку, а также последовательно соединенные первый оптоволоконный сумматор 7, объединяющий два волокна в одно, первый оптоволоконный разветвитель 8, разделяющий волокно на два волокна, выходное плечо которого с наибольшим коэффициентом деления соединено с оптоволоконной линией 6 временной задержки калиброванной длины, выход которой соединен с входным плечом первого оптоволоконного сумматора 7 с наибольшим коэффициентом объединения. Длины всех оптических волокон кроме оптоволоконной линии 6 временной задержки калиброванной длины откалиброваны таким образом, что время выхода первого по счету оптического импульса соответствует времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на границе мертвой зоны поверяемого устройства, а длина оптоволоконной линии 6 временной задержки откалибрована таким образом, что времена выхода всех последующих оптических импульсов соответствуют временам прямого и обратного прохождения оптического импульса в атмосфере от поверяемого устройства до отражающих объектов, находящихся на высоте N*H, где N равно количеству циклических проходов оптического импульса по упомянутой линии.
Для подстройки динамического диапазона путем внесения дополнительных затуханий на выходе разветвителя 8 предусмотрен регулируемый аттенюатор 9. Элементы 6, 7, 8, 9 составляют оптический блок 5 и помещены в отдельный корпус.
На Фиг. 2 представлена схема устройства, реализующая способ и обеспечивающая контроль мертвой зоны, пространственного разрешения и дискретных отсчетов высотных измерений.
Устройство на Фиг. 2 дополнительно содержит второй оптоволоконный разветвитель 10, второй оптоволоконный сумматор 11 и первую малую калиброванную оптоволоконную линию 12 временной задержки. Для подстройки динамического диапазона схема может содержать дополнительные аттенюаторы 13.
На Фиг. 3 представлена схема устройства, реализующая способ и обеспечивающая контроль мертвой зоны, пространственного разрешения, дискретных отсчетов высотных измерений и пространственного разрешения на каждом дискретном отсчете высотных измерений.
Схема устройства, изображенного на Фиг. 3, аналогична предыдущей, с той разницей, что она дополнительно содержит оптоволоконный смеситель 14 и вторую малую калиброванную оптоволоконную линию 15 временной задержки, причем один из входов смесителя 14 подключен к выходу разветвителя 8 с наименьшим коэффициентом деления через регулируемый аттенюатор 9, выход смесителя 14 подключен к входу сумматора 11 с наибольшим коэффициентом объединения, а свободный выход смесителя 14 замыкается на его свободный вход через калиброванную малую оптоволоконную линию 15 временной задержки.
Устройство на Фиг. 1 работает следующим образом. Оптический импульс от поверяемого облакомера вводится в коллиматор 2 приемопередающего блока 1. Далее по дуплексному оптоволоконному коммутационному кабелю 4 калиброванной длины поступает в плечо оптоволоконного сумматора 7 с определенными коэффициентами объединения, после чего поступает на оптоволоконный разветвитель 6 с определенными коэффициентами деления, где разделяется в заданной пропорции. Одна часть излучения (меньшая) через регулируемый аттенюатор 9 и дуплексный оптоволоконный кабель 4 выводится из коллиматора 3 и подается на приемный канал поверяемого облакомера. Другая часть излучения (большая) проходит через калиброванную замкнутую оптоволоконную линию 6 задержки, которая замыкается через второе плечо сумматора 7, приобретая временную задержку, пропорциональную длине этой линии. Прошедшее через замкнутую линию излучение попадает во второе плечо сумматора 7 и далее вновь делится в заданной пропорции разветвителем 8, при этом часть излучения вновь выводится из схемы, а другая часть поступает в замкнутую калиброванную оптоволоконную линию 6. Так осуществляется цикличность работы схемы до полного затухания светового импульса. Поскольку длины всех оптических волокон в системе известны с высокой точностью, можно точно определить время распространения светового импульса. Длины всех волокон между коллиматорами 2 и 3 калибруются таким образом, чтобы время распространения светового импульса в них соответствовало времени прямого и обратного распространения светового импульса в атмосфере в пределах мертвой зоны облакомера, а длина замкнутой оптоволоконной линии 6 задержки калибруется таким образом, чтобы время распространения светового импульса в ней соответствовало времени прямого и обратного распространения светового импульса в атмосфере от облакомера до объекта, находящегося на расстоянии (высоте) Н. Длина замкнутой калиброванной оптоволоконной линии 6 задержки постоянна, следовательно, циклически распространяющийся световой импульс с каждым новым проходом приобретает постоянную и известную временную задержку. Показания
поверяемого облакомера сверяются с расстояниями, которым эквивалентны известные времена задержки оптоволоконных линий. Время прихода первого оптического импульса на фотоприемник поверяемого облакомера определяет мертвую зону облакомера, все последующие пришедшие импульсы формируют дискретные эквидистантные временные отсчеты, эквивалентные множеству объектов (имитация облаков), находящихся на одной оси и отстоящих на равные известные (задаваемые) расстояния, кратные N*H, где N – количество проходов импульса по замкнутой линии. Количество принятых импульсов будет определяться, главным образом, динамическим диапазоном поверяемого облакомера, а также коэффициентами деления оптоволоконных сумматора 7 и разветвителя 8 и затуханием света в замкнутой калиброванной оптоволоконной линии 6 задержки. Аттенюатор 9 позволяет внести дополнительные затухания для подстройки динамического диапазона.
Принцип работы схемы, изображенной на Фиг. 2, аналогичен предыдущей. В этом случае первая малая оптоволоконная линия 12 временной задержки калибруется таким образом, чтобы разность времен распространения светового импульса в ней и в линии мертвой зоны была равна времени прямого и обратного распространения светового импульса в атмосфере в пределах пространственного разрешения облакомера выше его мертвой зоны. В этом случае на фотоприемник облакомера будут приходить оптические импульсы, отстоящие от момента излучения зондирующего импульса на время, эквивалентное прямому и обратному распространению света в атмосфере в пределах мертвой зоны, мертвой зоны и высоты, эквивалентной величине пространственного разрешения облакомера; а также дискретные эквидистантные временные отсчеты, эквивалентные множеству объектов (имитация облаков), находящихся на одной оси и отстоящих на равные известные (задаваемые) расстояния, кратные N*H, где N – количество проходов импульса по замкнутой линии.
Принцип работы схемы, изображенной на Фиг. 3, аналогичен предыдущей. В этом случае длина второй малой оптоволоконной линии 15 временной задержки калибруется таким образом, чтобы время распространения светового импульса в ней было эквивалентно времени прямого и обратного распространения света в атмосфере в пределах пространственного разрешения облакомера. Такая схема, помимо прочего, обеспечивает дискретные временные отсчеты, эквивалентные пространственному разрешению облакомера, следующие после каждого основного выходного оптического импульса.
Технический результат, получаемый при использовании предлагаемой группы изобретений, заключается в значительном упрощении процедуры проведения контрольных и поверочных мероприятий лазерных облакомеров, и повышении ее эффективности, включая уменьшение эксплуатационных расходов, связанных с монтажом/демонтажем, транспортировкой и проведением контрольных и поверочных мероприятий указанного оборудования, при сохранении высокой точности контроля и поверки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАССЕИВАЮЩЕГО ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОГО ОБЪЕКТА И ДОПЛЕРОВСКИЙ НИЗКОКОГЕРЕНТНЫЙ ЛИДАР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365942C1 |
| ОПТИЧЕСКИЙ РЕФЛЕКТОМЕТР | 2017 |
|
RU2655046C1 |
| Способ и устройство генерации квантовых состояний с фазовым кодированием и состоянием ловушек | 2022 |
|
RU2814147C1 |
| КАЛИБРАТОР ФАЗОВЫХ СДВИГОВ | 1991 |
|
RU2011998C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ УЛЬТРАЗВУКОВЫХ ВОЛН С ПОМОЩЬЮ НЕЛИНЕЙНОГО ОПТИЧЕСКОГО ЭФФЕКТА ВЫНУЖДЕННОГО РАССЕЯНИЯ МАНДЕЛЬШТАМА-БРИЛЛЮЭНА | 2023 |
|
RU2798750C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2016 |
|
RU2648017C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФАЗОВЫХ ЭЛЕМЕНТОВ И ДИСПЕРСИИ ОПТИЧЕСКОГО ВОЛОКНА И СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФАЗОВЫХ ЭЛЕМЕНТОВ И ДИСПЕРСИИ ОПТИЧЕСКОГО ВОЛОКНА | 2015 |
|
RU2713038C2 |
| Устройство контроля фазовых сдвигов излучения в интегральных схемах на базе несимметричного интерферометра Маха-Цендера | 2023 |
|
RU2805561C1 |
| СПОСОБ МОНИТОРИНГА ХАРАКТЕРИСТИК ОПТИЧЕСКИХ ВОЛОКОН ВОЛОКОННО-ОПТИЧЕСКИХ ЛИНИЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2822691C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТОВ | 2016 |
|
RU2665809C2 |
Изобретение относится к области метрологии и касается способа контроля и поверки метеорологического лидарного устройства. Способ включает в себя ввод оптического зондирующего импульса через приемную оптическую систему в оптоволоконную линию временной задержки калиброванной длины и вывод через передающую оптическую систему на фотоприемник поверяемого устройства. В оптоволоконной линии временной задержки производят разделение оптической энергии зондирующего импульса. Часть энергии через оптическое волокно калиброванной длины направляют на фотоприемник поверяемого устройства, а другую часть направляют в замкнутую оптоволоконную линию временной задержки. За каждый циклический проход светового импульса осуществляют отведение части оптической энергии импульса и направление ее на фотоприемник поверяемого устройства. Таким образом, посредством замкнутой оптоволоконной линии временной задержки калиброванной длины формируют последовательность затухающих оптических импульсов, отстоящих друг от друга на равные промежутки времени, определяемые ее длиной. Технический результат заключается в расширении функциональных возможностей и повышении точности измерений. 2 н. и 8 з.п. ф-лы, 3 ил.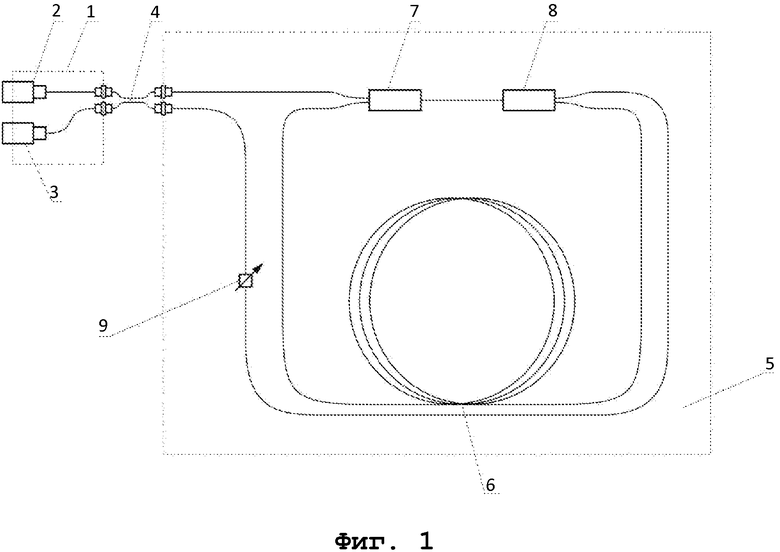
1. Способ контроля и поверки метеорологического лидарного устройства типа облакомер, в котором оптический зондирующий импульс поверяемого устройства вводят через приемную оптическую систему в оптоволоконную линию временной задержки калиброванной длины и выводят через передающую оптическую систему на фотоприемник поверяемого устройства, отличающийся тем, что в оптоволоконной линии временной задержки производят разделение оптической энергии зондирующего импульса в пропорции, определяемой коэффициентами деления и объединения разветвителей и сумматоров, при этом часть энергии через оптическое волокно калиброванной длины направляют на фотоприемник поверяемого устройства через передающую оптическую систему приемопередающего блока, а другую часть оптической энергии направляют в замкнутую оптоволоконную линию временной задержки калиброванной длины, при этом за каждый циклический проход светового импульса осуществляют отведение части оптической энергии импульса и направление ее в оптическое волокно калиброванной длины на фотоприемник поверяемого устройства через передающую оптическую систему приемопередающего блока,
причем время, прошедшее между моментом излучения оптического зондирующего импульса и моментами приходов оптических импульсов, сформированных в результате деления, на фотоприемник поверяемого устройства, определяют исходя из известной длины оптических волокон,
при этом посредством замкнутой оптоволоконной линии временной задержки калиброванной длины формируют последовательность затухающих оптических импульсов, отстоящих друг от друга на равные промежутки времени, определяемые ее длиной.
2. Способ по п. 1, отличающийся тем, что длину замкнутой оптоволоконной линии временной задержки калибруют таким образом, чтобы время распространения оптического импульса в ней соответствовало времени прямого и обратного распространения оптического импульса в атмосфере от поверяемого устройства до отражающего объекта, находящегося на заданной высоте Н, при этом посредством циклического прохождения оптического импульса в ней осуществляют циклический отвод части энергии оптического импульса через равные промежутки времени, эквивалентные времени прямого и обратного распространения оптического импульса в атмосфере от устройства до объектов, находящихся на высоте N*H, где N равно количеству циклических проходов оптического импульса по замкнутой оптоволоконной линии калиброванной длины.
3. Способ по п. 2, отличающийся тем, что длины всех оптических волокон кроме замкнутой оптоволоконной линии временной задержки калибруют таким образом, чтобы время выхода первого по счету оптического импульса соответствовало времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на границе мертвой зоны поверяемого устройства, а время выхода второго по счету оптического импульса соответствовало времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на расстоянии, превышающем мертвую зону устройства на величину пространственного разрешения устройства.
4. Устройство контроля и поверки метеорологического лидарного устройства типа облакомер, содержащее приемопередающий блок, включающий в себя приемный и передающий коллиматоры, коммутационный дуплексный оптоволоконный кабель калиброванной длины и оптический блок, включающий в себя оптоволоконную линию временной задержки калиброванной длины, намотанную на катушку, отличающийся тем, что он дополнительно содержит последовательно соединенные первый оптоволоконный сумматор, объединяющий два волокна в одно, первый оптоволоконный разветвитель, разделяющий волокно на два волокна, причем выходное плечо первого оптоволоконного разветвителя с наибольшим коэффициентом деления соединено с оптоволоконной линией временной задержки калиброванной длины, выход которой соединен с входным плечом первого оптоволоконного сумматора с наибольшим коэффициентом объединения, а входное плечо первого сумматора соединено с приемным коллиматором коммутационным дуплексным оптоволоконным кабелем и выходное плечо первого оптоволоконного разветвителя с наименьшим коэффициентом деления соединено с передающим коллиматором коммутационным дуплексным оптоволоконным кабелем,
при этом длины всех оптических волокон кроме оптоволоконной линии временной задержки калиброванной длины откалиброваны таким образом, что время выхода первого по счету оптического импульса соответствует времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на границе мертвой зоны поверяемого устройства,
а длина оптоволоконной линии временной задержки откалибрована таким образом, что времена выхода всех последующих оптических импульсов соответствуют временам прямого и обратного прохождения оптического импульса в атмосфере от поверяемого устройства до отражающих объектов, находящихся на высоте N*H, где N равно количеству циклических проходов оптического импульса по упомянутой линии.
5. Устройство по п. 4, отличающееся тем, что оно дополнительно содержит первую малую оптоволоконную линию временной задержки калиброванной длины, второй оптоволоконный разветвитель, разделяющий волокно на два волокна, и второй оптоволоконный сумматор, объединяющий два волокна в одно, причем выходное плечо второго оптоволоконного разветвителя с наименьшим коэффициентом деления соединено с входным плечом второго оптоволоконного сумматора с наименьшим коэффициентом объединения через первую малую оптоволоконную линию временной задержки, выходное плечо второго оптоволоконного разветвителя с наибольшим коэффициентом деления соединено с входным плечом первого оптоволоконного сумматора с наименьшим коэффициентом объединения и выходное плечо первого оптоволоконного разветвителя с наименьшим коэффициентом деления соединено с входным плечом второго оптоволоконного сумматора с наибольшим коэффициентом объединения, а входное плечо второго разветвителя соединено с приемным коллиматором коммутационным дуплексным оптоволоконным кабелем и выходное плечо второго оптоволоконного сумматора соединено с передающим коллиматором коммутационным дуплексным оптоволоконным кабелем,
причем длины оптических волокон первой малой оптоволоконной линии временной задержки, второго оптоволоконного разветвителя и второго оптоволоконного сумматора откалиброваны таким образом, что время выхода первого по счету оптического импульса соответствует времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на границе мертвой зоны поверяемого устройства, а время выхода второго по счету оптического импульса соответствует времени прямого и обратного прохождения оптического импульса в атмосфере до отражающего объекта, находящегося на расстоянии, превышающем мертвую зону поверяемого устройства на величину пространственного разрешения поверяемого устройства.
6. Устройство по п. 5, отличающееся тем, что оно дополнительно содержит вторую малую оптоволоконную линию временной задержки калиброванной длины и третий оптоволоконный смеситель, смешивающий и разделяющий два волокна, причем один из входов третьего смесителя подключен к выходу первого оптоволоконного разветвителя с наименьшим коэффициентом деления, выход третьего смесителя подключен к входу второго оптоволоконного сумматора с наибольшим коэффициентом объединения, а свободный выход третьего смесителя замкнут на его свободный вход через вторую малую оптоволоконную линию временной задержки, причем длины оптических волокон третьего смесителя и второй малой оптоволоконной линии временной задержки откалиброваны таким образом, что время распространения оптического импульса в них соответствует времени прямого и обратного прохождения оптического импульса в атмосфере в пределах пространственного разрешения поверяемого устройства.
7. Устройство по п. 4, отличающееся тем, что оно дополнительно содержит по меньшей мере один регулируемый оптоволоконный аттенюатор, подключенный после выходного плеча первого оптоволоконного разветвителя с наименьшим коэффициентом деления.
8. Устройство по п. 5, отличающееся тем, что оно дополнительно содержит по меньшей мере один регулируемый оптоволоконный аттенюатор, подключенный после выходного плеча первого оптоволоконного разветвителя с наименьшим коэффициентом деления.
9. Устройство по п. 5, отличающееся тем, что оно дополнительно содержит по меньшей мере один регулируемый оптоволоконный аттенюатор и по меньшей мере один нерегулируемый оптоволоконный аттенюатор, установленные перед входом первого оптоволоконного сумматора с наибольшим коэффициентом объединения и/или после выхода второго оптоволоконного разветвителя с наименьшим коэффициентом деления и/или после выхода второго оптоволоконного сумматора.
10. Устройство по п. 8, отличающееся тем, что оно дополнительно содержит по меньшей мере один регулируемый оптоволоконный аттенюатор и по меньшей мере один нерегулируемый оптоволоконный аттенюатор, установленные перед входом первого оптоволоконного сумматора с наибольшим коэффициентом объединения и/или после выхода второго оптоволоконного разветвителя с наименьшим коэффициентом деления и/или после выхода второго оптоволоконного сумматора.
| Устройство для сортировки цильпебса | 1954 |
|
SU102815A1 |
| СПОСОБ ИМИТАЦИИ ДАЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2249231C2 |
| US 8368876 B1, 05.02.2013 | |||
| US 5825464 A1, 20.10.1998. | |||

