ОБЛАСТЬ ТЕХНИКИ
Раскрытие относится к способу для управления устройством турбонагнетателя двигателя внутреннего сгорания и электрическим приводом.
УРОВЕНЬ ТЕХНИКИ
Двигатели могут использовать турбонагнетатель для улучшения интенсивности выходного крутящего момента/мощности двигателя. В одном из примеров, турбонагнетатель может включать в себя компрессор и турбину, соединенные приводным валом, где турбина присоединена к стороне выпускного коллектора, а компрессор присоединен к стороне впускного коллектора. Таким образом, турбина с приводом от выхлопной системы питает энергией компрессор, чтобы увеличивать давление во впускном коллекторе (например, наддув или давление наддува) и усиливать поток воздуха в двигатель. Наддув может регулироваться посредством регулировки количества газа, попадающего в турбину, например, с помощью регулятора давления наддува. Клапан регулятора давления наддува может управляться на основании условий эксплуатации для достижения требуемого наддува. В одном из примеров клапан регулятора давления наддува может быть электронным регулятором давления наддува, управляемым ассоциативно связанным электрическим приводом. В некоторых вариантах осуществления электрический привод является электродвигателем. Электродвигатель возбуждается для изменения положения регулятора давления наддува, тем самым регулируя количество газа, достигающего турбины, и добиваясь требуемого наддува.
Заявка на выдачу патента США № 2012/0001111 описывает набор обратных связей для регулирования по положению выпускного газового клапана с электрическим приводом. Электрический привод включает в себя электродвигатель, который передает движущую силу на тягу. Линейное движение тяги впоследствии передается посредством поворотного движения на регулятор давления наддува, тем самым, управляя регулятором давления наддува и, соответственно, наддувом, выдаваемым в двигатель. Блок управления двигателем считывает линейное положение тяги посредством датчика хода, который включает в себя магнитный считывающий элемент на эффекте Холла, выполненный с возможностью воспринимать изменения магнитного потока в магнитном подвижном теле, включенном в электрический привод. Так как есть известное соответствие между движением тяги, движением магнитного подвижного тела и движением выпускного клапана, положение выпускного клапана может контролироваться и управляться посредством считывания изменений магнитного потока подвижного тела. В дополнение, датчик хода мог бы считывать угловое положение рычага в приводе, который поворачивается для перемещения тяги линейным образом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретатели в материалах настоящей заявки осознали проблему у таких подходов, использующих электрический привод для управления клапаном регулятора давления наддува. Даже если точное считывание обеспечивается посредством регулирования магнитного потока, крутящий момент, выдаваемый электрическим приводом, может меняться на основании изменений в отношении магнитного поля, вырабатываемого в приводе, вызванных изменением рабочих температур (возможно, превышающих 100 градусов Цельсия). Без способности учитывать изменение такого магнитного поля по мере того, как оно изменяется на всем протяжении диапазона рабочих температур, а также его влияние на крутящий момент и положение привода, управление регулятором давления наддува может ухудшаться, вызывая нежелательные изменения наддува и выходной мощности двигателя.
Предусмотрены способы для компенсации магнитного поля электрического привода, оперативно присоединенного к регулятору давления наддува, на всем диапазоне температур.
В одном из примеров привод регулятора давления наддува, присоединенный к клапану регулятора давления наддува, на выпуске двигателя регулируется для управления уровнем наддува двигателя у двигателя. Регулировка производится на основании магнитного поля магнита в приводе регулятора давления наддува и подвергается поправке на основании температуры магнита.
Таким образом, посредством регулировки привода регулятора давления наддува на основании магнитного поля и внесения поправки в регулировку на основании температуры магнита, можно учитывать изменение магнитного поля, обусловленное изменением температуры, и тем самым, точнее регулировать крутящий момент привода, скорость и положение регулятора давления наддува.
В еще одном примере кодовый датчик положения может использоваться для измерения положения, представляющего привод, и расчета угловой скорости на основании положения. В таком случае напряжение на клеммах может измеряться и, вместе с угловой скоростью, использоваться для оценки температуры магнита и магнитного поля. Фактический крутящий момент привода затем может оцениваться для заданного приложенного тока и рабочей температуры. В еще одном примере, сопротивление привода оценивается по приложенному току, напряжению на клеммах и напряжению на щетках. Температура магнита в таком случае может оцениваться на основании изменения сопротивления обмотки на градус. Затем может оцениваться магнитное поле. Таким образом, магнитное поле, вырабатываемое электрическим приводом, может оцениваться на всем протяжении диапазона рабочих температур. Мощность электрического привода может точно регулироваться, в свою очередь, управляя регулятором давления наддува и подавая требуемый уровень наддува в двигатель. Варианты осуществления в материалах настоящей заявки дополнительно применяют магнитную поправку к напряжению или сигналу, используемому для управления электрическим приводом. При первой температуре, при которой величина магнитного поля может уменьшаться, магнитная поправка может увеличивать рабочее напряжение или амплитуду сигнала для заданного требуемого крутящего момента привода. На второй, более низкой температуре, при которой величина магнитного поля может усиливаться относительно таковой при первой температуре, магнитная поправка может уменьшать рабочее напряжение или амплитуду сигнала, чтобы выдавать заданный требуемый крутящий момент привода.
Более конкретно, в настоящей заявке раскрыт способ, состоящий в том, что: регулируют привод регулятора давления наддува, присоединенный к клапану регулятора давления наддува на выпуске двигателя, для управления уровнем наддува двигателя у двигателя, причем в регулировку, основанную на магнитном поле магнита в приводе регулятора давления наддува, вносят поправку на основании температуры магнита.
В дополнительном аспекте регулировка заключается в том, что регулируют ток, подаваемый на привод, и при этом регулировка дополнительно основана на сопротивлении обмотки, причем упомянутое сопротивление основано на температуре.
В другом дополнительном аспекте температуру магнита оценивают на основании температуры отработавших газов и условий эксплуатации.
В еще одном дополнительном аспекте регулировка дополнительно заключается в том, что для первого материала уменьшают ток для заданного крутящего момента привода, когда температура магнита находится выше порогового значения, и увеличивают ток для заданного крутящего момента, когда температура магнита находится ниже порогового значения, а для второго материала, увеличивают ток для заданного крутящего момента привода, когда температура магнита находится выше порогового значения, и уменьшают ток для заданного крутящего момента, когда температура магнита находится ниже порогового значения.
В еще одном дополнительном аспекте магнитное поле оценивают на основании справочной таблицы, имеющей входные данные, включающие в себя положение привода, угловую скорость привода и напряжение на клеммах.
В еще одном дополнительном аспекте магнитное поле оценивают на основании справочной таблицы, причем справочная таблица сформирована на основании одного или более из тока привода, напряжения на клеммах, напряжения на щетках, оцененного сопротивления проводов, изменения сопротивления и оцененной температуры проводов.
Кроме того, раскрыт способ управления турбонагнетателем двигателя посредством электрического привода, состоящий в том, что: оценивают температуру магнита у одного или более магнитов, расположенных в электрическом приводе; оценивают магнитное поле одного или более магнитов на основании оцененной температуры магнита; определяют поправку на магнитное поле на основании оцененного магнитного поля; эксплуатируют электрический привод на токе, определенном на основании поправки на магнитное поле; и регулируют поправку на магнитное поле на основании изменения оцененной температуры магнита.
В дополнительном аспекте привод включает в себя постоянные магниты.
В другом дополнительном аспекте привод присоединен к регулятору давления наддува турбонагнетателя.
В еще одном дополнительном аспекте положением регулятора давления наддува управляют в соответствии с требуемым положением на основании поправки на магнитное поле.
В еще одном дополнительном аспекте требуемое положение основано на требуемом уровне наддува двигателя.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что осуществляют непосредственный впрыск топлива в цилиндр двигателя.
Также раскрыт способ управления регулятором давления наддува турбонагнетателя двигателя посредством электрического привода, состоящий в том, что: при первой температуре регулируют электрический привод на основании поправки на напряжение повышенного магнитного поля; и при второй, более низкой температуре, регулируют электрический привод на основании поправки на напряжение пониженного магнитного поля.
В дополнительном аспекте электрический привод включает в себя магниты.
В другом дополнительном аспекте электрический привод регулируют посредством того, что регулируют относительную длительность включения, подаваемую на электрический привод из контроллера, причем контроллер включает в себя команды для выполнения действий по регулировке.
В еще одном дополнительном аспекте регулятор давления наддува регулируют для поддержания требуемого уровня наддува на впуске двигателя.
В еще одном дополнительном аспекте относительная длительность включения увеличивается при первой температуре и уменьшается при второй температуре.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего Подробного описания, когда воспринимается в одиночку или в связи с прилагаемыми чертежами.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного объекта патентования, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный объект патентования не ограничен реализациями, которые кладут конец каким-нибудь недостаткам, отмеченным выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
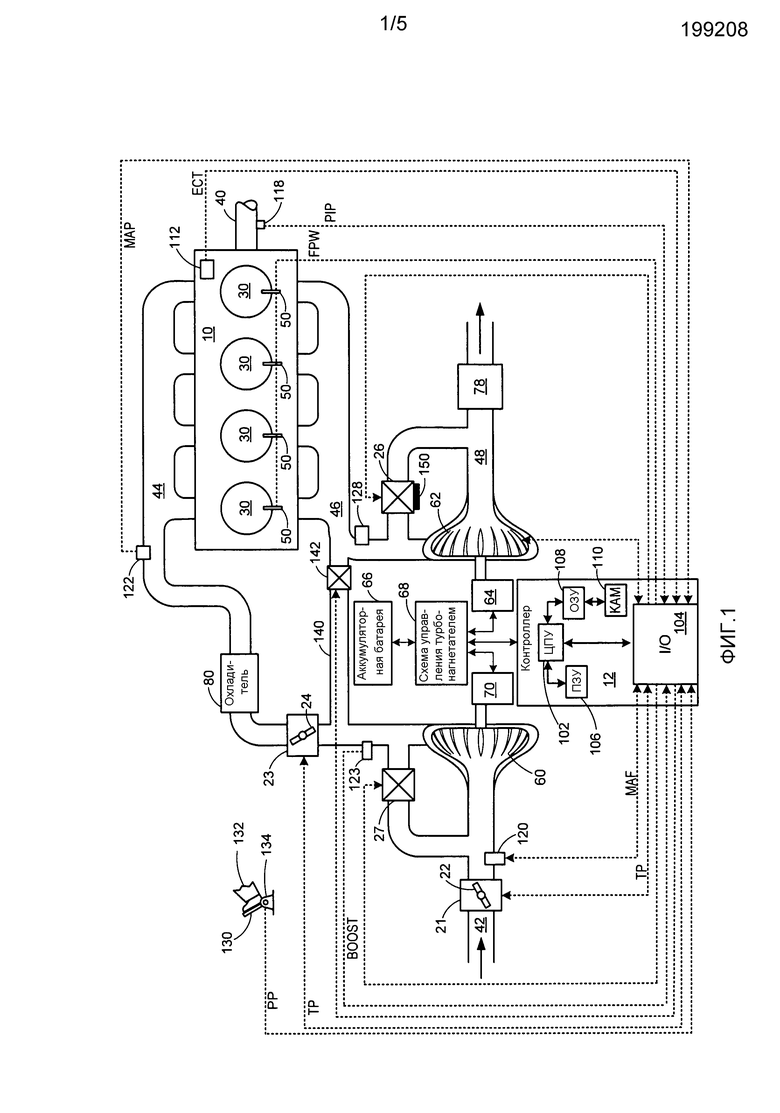
Фиг. 1 показывает структурную схему двигателя с турбонаддувом, включающего в себя регулятор давления наддува.
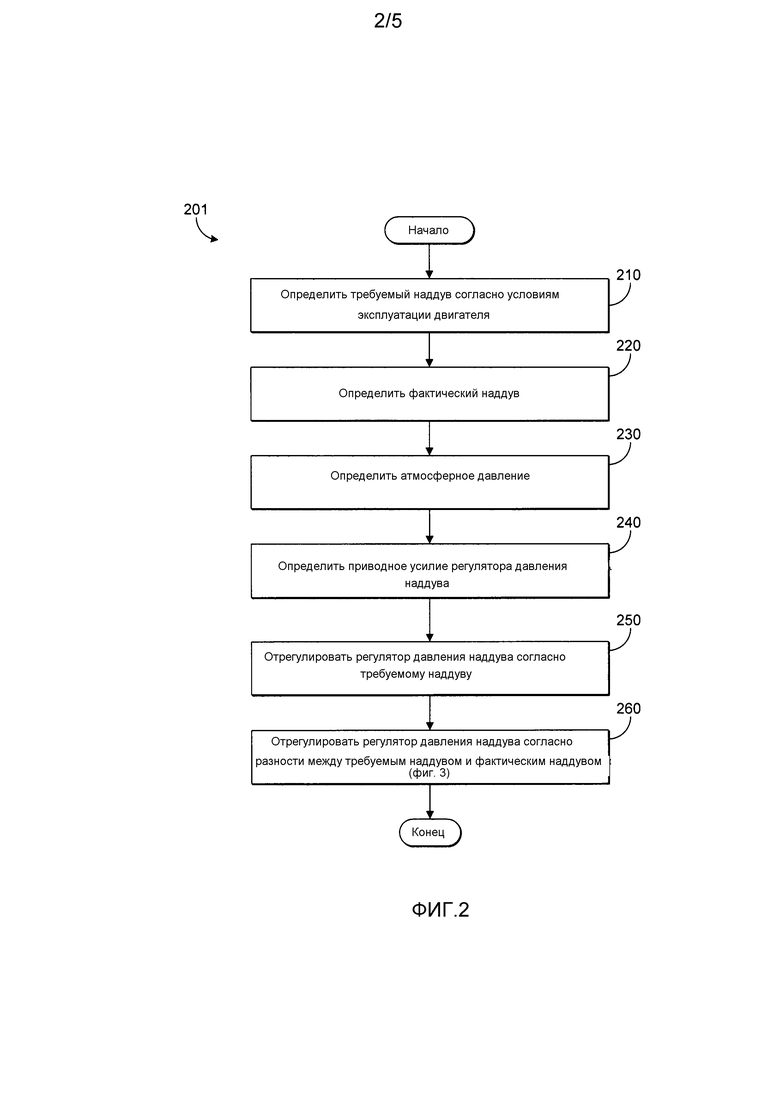
Фиг. 2 показывает блок-схему последовательности операций способа, иллюстрирующую способ для управления турбонагнетателем посредством регулятора давления наддува.
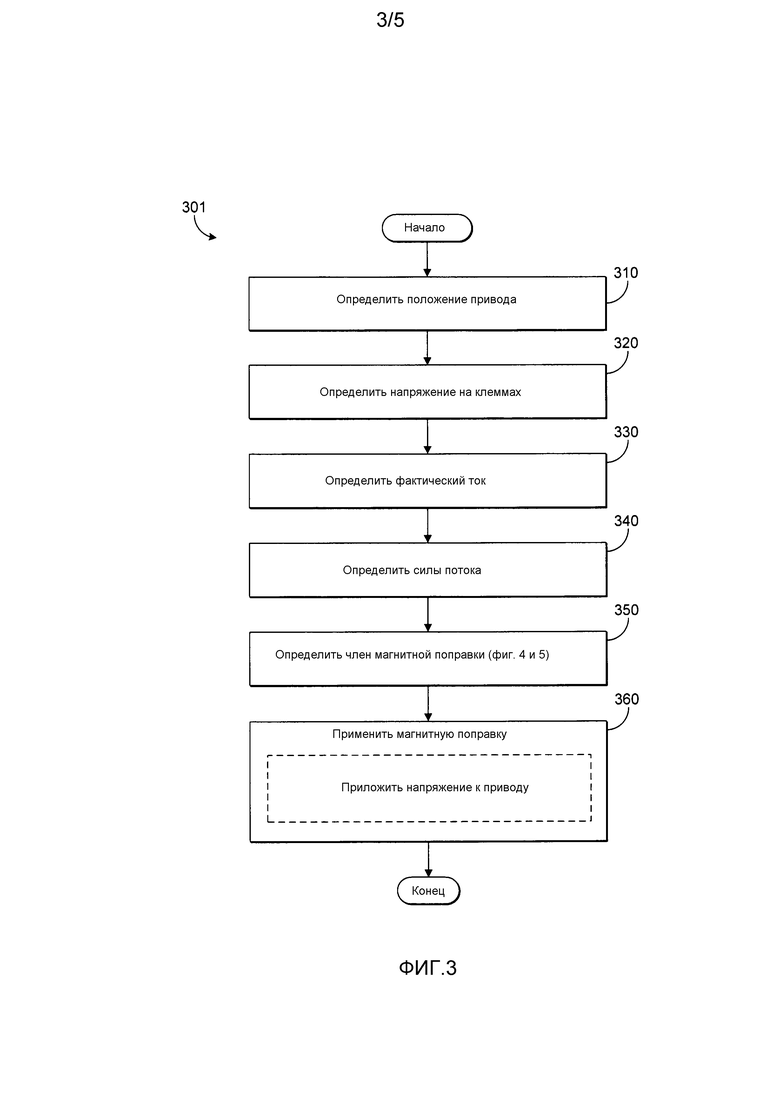
Фиг. 3 показывает блок-схему последовательности операций способа, иллюстрирующую способ для управления регулятором давления наддува с помощью электрического привода.
Фиг. 4 показывает блок-схему последовательности операций способа для оценки и внесения поправки на переменное магнитное поле, вырабатываемое электрическим приводом.
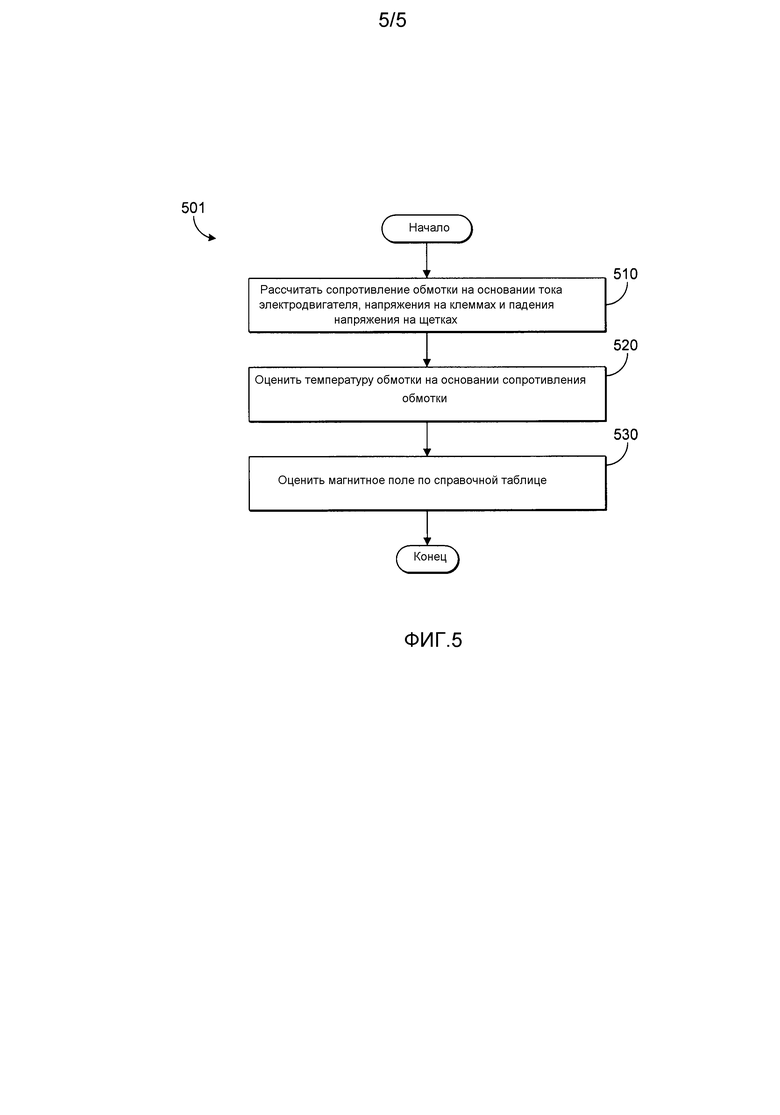
Фиг. 5 показывает блок-схему последовательности операций альтернативного способа для оценки и внесения поправки на переменное магнитное поле, вырабатываемое электрическим приводом.
ПОДРОБНОЕ ОПИСАНИЕ
В двигателях с наддувом, приводы электронного регулятора давления наддува могут выдавать точный выходной сигнал, чтобы добиваться подачи требуемого наддува в двигатель. Такие приводы, однако, имеют дело с высокими окружающими температурами и большими колебаниями этих температур. Выходная мощность электрического привода может быть функцией тока, подаваемого на него, и магнитного поля, вырабатываемого магнитами, если присутствуют. Это магнитное поле, в том числе его величина, меняется по мере того, как окружающая температура изменяется внутри диапазона рабочих температур, который может превышать 100 градусов по Цельсию. Без способности учитывать изменение этого магнитного поля на всем протяжении диапазона рабочих температур управление регулятором давления наддува может ухудшаться, вызывая нежелательные изменения рабочих характеристик выходной мощности двигателя с наддувом. Несмотря на то что сила, вырабатываемая электрическим приводом, может быть функцией его магнитного потока, умноженного на ток, протекающий через его обмотки (в дальнейшем, называемый «ток обмотки»), должно быть понятно, что магнитный поток может быть функцией температуры его магнитов, основанной на составе материалов магнитов. В настоящем раскрытии будет предполагаться, что магнитный поток электрического привода меняется в обратной зависимости от температуры магнита. Однако способы, описанные в материалах настоящей заявки, могут быть приспособлены для случая, в котором магнитный поток меняется пропорционально температуре магнита.
Предусмотрены различные способы для оценки и внесения поправки на изменяющееся магнитное поле в электрическом приводе. Способы могут включать в себя оценку магнитного поля на основании множества параметров, в том числе, угловой скорости, напряжения на клеммах, тока привода и температуры магнита. Способы дополнительно могут включать в себя оценку магнитного поля по справочной таблице на основании параметров, включающих в себя электрический ток, напряжение на щетках и сопротивление обмотки. Фиг. 1 - структурная схема двигателя с турбонаддувом, включающего в себя регулятор давления наддува. Двигатель по фиг. 1 также включает в себя контроллер, выполненный с возможностью выполнять способы, изображенные на фиг. 2-5.
Фиг. 1 - принципиальная схема, показывающая примерный двигатель 10, который может быть включен в силовую установку автомобиля. Двигатель 10 показан с четырьмя цилиндрами 30. Однако другие количества цилиндров могут использоваться в соответствии с данным раскрытием. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. Каждая камера 30 сгорания (например, цилиндр) двигателя 10 может включать в себя стенки камеры сгорания с поршнем (не показан), расположенным в них. Поршни могут быть присоединены к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии (не показана). Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10.
Камеры 30 сгорания могут принимать всасываемый воздух из впускного коллектора 44 через впускной канал 42 и могут выпускать отработавшие газы через выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 46 могут избирательно сообщаться с камерой 30 сгорания через соответственные впускные клапаны и выпускные клапаны (не показаны). В некоторых вариантах осуществления, камера 30 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
Топливные форсунки 50 показаны присоединенными непосредственно к камере 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала FPW, принятого из контроллера 12. Таким образом, топливная форсунка 50 обеспечивает то, что известно в качестве непосредственного впрыска топлива в камеру 30 сгорания. Топливная форсунка, например, может быть установлена сбоку камеры сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 50 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива. В некоторых вариантах осуществления, камеры 30 сгорания, в качестве альтернативы или дополнительно, могут включать в себя топливную форсунку, скомпонованную во впускном коллекторе 44, в конфигурации, которая предусматривает то, что известно как оконный впрыск топлива во впускное окно выше по потоку от каждой камеры 30 сгорания.
Впускной канал 42 может включать в себя дроссель 21 и 23, имеющий дроссельные заслонки 22 и 24, соответственно. В этом конкретном примере, положение дроссельных заслонок 22 и 24 может регулироваться контроллером 12 посредством сигналов, выдаваемых на привод, включенный в состав дросселями 21 и 23. В одном из примеров, приводы могут быть электрическими приводами (например, электродвигателями), конфигурацией, которая обычно называется электронный дроссельный регулятор (ETC). Таким образом, заслонки 21 и 23 могут приводиться в действие для варьирования всасываемого воздуха, подаваемого в камеру 30 сгорания, между другими цилиндрами двигателя. Положение дроссельных заслонок 22 и 24 может выдаваться в контроллер 12 сигналом TP положения дросселя. Впускной канал 42, кроме того, может включать в себя датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для выдачи соответственных сигналов MAF (массового расхода воздуха) и MAP (давления воздуха в коллекторе) в контроллер 12.
Выпускной канал 48 может принимать отработавшие газы из цилиндров 30. Датчик 128 отработавших газов показан присоединенным к выпускному каналу 48 выше по потоку от турбины 62 и устройства 78 снижения токсичности выбросов. Датчик 128 может быть выбран из числа различных пригодных датчиков для выдачи показания топливо/воздушного соотношения в отработавших газах, например, таких как линейный кислородный датчик или UEGO (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный кислородный датчик или EGO, датчик NOx, HC, или CO. Устройство 78 снижения токсичности выбросов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности выбросов или их комбинациями.
Температура отработавших газов может измеряться одним или более датчиков температуры (не показаны), расположенных в выпускном канале 48. В качестве альтернативы, температура отработавших газов может логически выводиться на основании условий эксплуатации двигателя, таких как число оборотов, нагрузка, топливо-воздушное соотношение (AFR), запаздывание искрового зажигания, и т. д.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, дежурную память 110 и шину данных. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ECT) с датчика 112 температуры, схематически показанного в одном месте в пределах двигателя 10; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика положения дросселя, как обсуждено; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122, как обсуждено. Сигнал числа оборотов двигателя, RPM, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе 44. Отметим, что могут использоваться различные комбинации вышеприведенных датчиков, такие как датчик MAF без датчика MAP, или наоборот. Во время стехиометрической работы, датчик MAP может давать показание крутящего момента двигателя. Кроме того, этот датчик, наряду с выявленным числом оборотов двигателя, может давать оценку заряда (включающего в себя воздух), введенного в цилиндр. В одном из примеров, датчик 118, который также используется в качестве датчика числа оборотов двигателя, может вырабатывать предопределенное количество равноразнесенных импульсов каждый оборот коленчатого вала 40. В некоторых примерах, постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машиночитаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены.
Двигатель 10 дополнительно может включать в себя компрессионное устройство, такое как турбонагнетатель или нагнетатель, включающий в себя по меньшей мере компрессор 60, скомпонованный вдоль впускного коллектора 44. Что касается турбонагнетателя, компрессор 60 может по меньшей мере частично приводиться в действие турбиной 62, например, через вал или другое соединительное устройство. Турбина 62 может быть скомпонована вдоль выпускного канала 48. Различные компоновки могут быть предусмотрены для приведения в движение компрессора. Что касается нагнетателя, компрессор 60 может по меньшей мере частично приводиться в движение двигателем и/или электрической машиной и может не включать в себя турбину. Таким образом, величина сжатия, обеспечиваемого для одного или более цилиндров двигателя через турбонагнетатель или нагнетатель, может регулироваться контроллером 12. В некоторых случаях, турбина 62, например, может приводить в движение электрогенератор 64 для выдачи энергии в аккумуляторную батарею 66 через схему 68 управления турбонагнетателем. Энергия из аккумуляторной батареи 66 затем может использоваться для приведения в движение компрессора 60 с помощью электродвигателя 70. Кроме того, датчик 123 может быть размещен во впускном коллекторе 44 для выдачи сигнала BOOST (НАДДУВ) в контроллер 12.
Кроме того, выпускной канал 48 может включать в себя регулятор 26 давления наддува для отведения отработавших газов из турбины 62. В некоторых вариантах осуществления, регулятор 26 давления наддува может быть многокаскадным регулятором наддува, таким как двухкаскадный регулятор давления наддува с первым каскадом, выполненным с возможностью регулировать давление наддува, и вторым каскадом, выполненным с возможностью увеличивать тепловой поток в устройство 78 снижения токсичности выбросов. Регулятор 26 давления наддува может приводиться в действие с помощью привода 150, который, например, может быть электрическим приводом, включающим в себя постоянные магниты. В некоторых вариантах осуществления, привод 150 может быть электродвигателем. Дополнительные подробности касательно регулятора 26 давления наддува и привода 150 будут представлены ниже. Впускной канал 42 может включать в себя перепускной клапан 27 компрессора, выполненный с возможностью отводить всасываемый воздух вокруг компрессора 60. Регулятор 26 давления наддува и/или перепускной клапан 27 компрессора могут управляться контроллером 12 через исполнительные механизмы (например, привод 150), например, чтобы открываться, когда требуется более низкое давление наддува.
Впускной канал 42 может дополнительно включать в себя охладитель 80 наддувочного воздуха (CAC) (например, промежуточный охладитель) для понижения температуры нагнетаемых турбонагнетателем или нагнетателем всасываемых газов. В некоторых вариантах осуществления охладитель 80 наддувочного воздуха может быть воздушно-воздушным теплообменником. В других вариантах осуществления охладитель 80 наддувочного воздуха может быть воздушно-жидкостным теплообменником.
Кроме того, в раскрытых вариантах осуществления, система рециркуляции отработавших газов (EGR) может направлять требуемую порцию отработавших газов из выпускного канала 48 во впускной канал 42 через канал 140 EGR. Количество EGR, выдаваемой во впускной канал 42, может регулироваться контроллером 12 посредством клапана 142 EGR. Кроме того, датчик EGR (не показан) может быть скомпонован внутри канала EGR и может выдавать показание одного или более из давления, температуры, концентрации отработавших газов. В качестве альтернативы, EGR может управляться посредством расчетного значения, основанного на сигналах с датчика MAF (выше по потоку), MAP (впускного коллектора), MAT (температуры газа в коллекторе) и датчика частоты вращения коленчатого вала. Кроме того, EGR может управляться на основании датчика O2 отработавших газов и/или кислородного датчика на впуске (впускного коллектора). В некоторых условиях, система EGR может использоваться для регулирования температуры смеси воздуха и топлива в пределах камеры сгорания. Фиг. 1 показывает систему EGR высокого давления, где EGR направляется из выше по потоку от турбины турбонагнетателя в ниже по потоку от компрессора турбонагнетателя. В других вариантах осуществления, двигатель, дополнительно или в качестве альтернативы, может включать в себя систему EGR низкого давления, где EGR направляется из ниже по потоку от турбины турбонагнетателя в выше по потоку от компрессора турбонагнетателя.
Далее, с обращением к фиг. 2, способ 201 может выполняться контроллером двигателя (например, контроллером 12) для управления турбонагнетателем с помощью регулятора давления наддува (например, регулятора 26 давления наддува). В одном из примеров, способ для управления турбонагнетателем двигателя с помощью регулятора давления наддува может содержать определение требуемого давления наддува и фактического давления наддува. Регулятор давления наддува можно регулировать согласно разности между требуемым давлением наддува и фактическим давлением наддува.
Продолжая по фиг. 2, на 210, способ включает в себя определение требуемого наддува согласно условиям эксплуатации двигателя. Оцениваемые условия могут непосредственно измеряться датчиками, например, такими как датчики 112, 118, 120, 122, 123 и 134, и/или условия могут оцениваться по другим условиям эксплуатации двигателя. Оцениваемые условия могут включать в себя температуру охлаждающей жидкости двигателя, температуру моторного масла, массовый расход воздуха (MAF), давление в коллекторе (MAP), наддув (например, давление наддува с датчика 123), число оборотов двигателя, число оборотов холостого хода, барометрическое давление, требуемый водителем крутящий момент (например, с датчика 134 положения педали), температуру воздуха, скорость транспортного средства, и т.д.
Затем, на 220, может определяться фактическое давление наддува. Фактический наддув может измеряться непосредственно по датчику, такому как датчик 123. Измерение может отправляться в контроллер 12 с помощью сигнала давления наддува и сохраняться на машиночитаемом запоминающем носителе. В альтернативном варианте осуществления, фактическое давление наддува может оцениваться на основании других рабочих параметров, таких как, например, на основании MAP и RPM.
Затем, на 230, может определяться атмосферное давление. Например, атмосферное давление может измеряться по датчику MAP при запуске двигателя и/или оцениваться на основании условий эксплуатации двигателя, в том числе, MAF, MAP, положения дросселя, и т.д. Измерение может отправляться в контроллер 12 и сохраняться на машиночитаемом запоминающем носителе. В альтернативном варианте осуществления, атмосферное давление может оцениваться на основании других рабочих параметров.
Затем, на 240, усилие приведения в действие регулятора давления наддува может рассчитываться на основании перепада давления на регуляторе давления наддува, потока отработавших газов, и/или угла клапана регулятора давления наддува. Регулятор давления наддува можно регулировать согласно усилию приведения в действие регулятора давления наддува. Усилие приведения в действие регулятора давления наддува может точно подходить к перепаду давления на регуляторе давления наддува. Например, усилие приведения в действие регулятора давления наддува может использоваться в качестве входных данных в динамическую модель регулятора давления наддува. Динамические характеристики регулятора давления наддува могут отображать требуемое давление регулятора давления наддува или требуемое положение клапана регулятора давления наддува в относительную длительность включения регулятора давления наддува для данного усилия приведения в действие регулятора давления наддува, где сигнал относительной длительности включения формируется контроллером и отправляется на привод регулятора давления наддува, чтобы регулировать усилие приведения в действие. Отображение в относительную длительность включения регулятора давления наддува может включать в себя использование справочных таблиц или расчет относительной длительности включения регулятора давления наддува. Сигнал управления регулятором давления наддува (WGC) может включать в себя широтно-импульсную модуляцию посредством относительной длительности включения для регулировки регулятора давления наддува. Требуемое давление регулятора давления наддува или требуемое положение клапана регулятора давления наддува, например, могут достигаться алгоритмами упреждающего управления, управления с обратной связью или другими алгоритмами управления.
Член компенсации может учитывать задержки привода регулятора давления наддува. Дополнительно, член компенсации дополнительно может включать в себя регулировки, основанные на перемещении сдвоенных независимых кулачков, которые могут оказывать влияние на давление наддува. Например, по мере того, как впускной кулачок перемещается некоторым образом, который увеличивал бы давление наддува относительно атмосферного давления, величина члена компенсации может уменьшаться. Подобным образом, по мере того, как впускной кулачок перемещается некоторым образом, который уменьшал бы давление наддува относительно атмосферного давления, величина члена компенсации может увеличиваться.
Затем, на 250, регулятор давления наддува можно регулировать согласно требуемому наддуву. Например, требуемое давление наддува может использоваться в качестве входных данных в алгоритм упреждающего управления для регулировки регулятора давления наддува. Алгоритм упреждающего управления может обрабатывать целевое давление регулятора давления наддува или целевое положение клапана регулятора давления наддува, которые могут использоваться в качестве входного сигнала во вспомогательные контуры управления.
Затем, на 260, ошибка наддува может рассчитываться в качестве разности между требуемым давлением наддува и фактическим давлением наддува. Регулятор давления наддува можно регулировать согласно обработанной ошибке давления наддува. Например, ошибка давления наддува может использоваться в качестве входного сигнала в алгоритм управления с обратной связью для расчета целевого давления регулятора давления наддува, если требуется регулирование по давлению, или целевого положения клапана регулятора давления наддува в пределах вспомогательного контура. Алгоритм управления может включать в себя член компенсации, как описано выше.
Как описано выше, регулятор давления наддува (например, регулятор 26 давления наддува на фиг. 1) может приводиться в действие приводом (например, приводом 150). Регулятор давления наддува можно регулировать для поддержания требуемого уровня наддува на впуске двигателя. В некоторых вариантах осуществления, привод может быть электродвигателем. Показана фиг. 3, дающая дополнительные подробности действий, выполняемых на 260, по мере того, как они применяются к электродвигателю, используемому для приведения в действие регулятора давления наддува. Способ 301, например, может выполняться контроллером 12 двигателя (например, контроллером 12). Способ 301 в особенности выполняет приведение в действие регулятора давления наддува и дополнительно может учитывать изменение магнитного поля, вырабатываемого электродвигателем, магнитное поле меняется в качестве функции изменяющейся окружающей температуры.
На 310 способа 301 определяется положение электродвигателя. Сначала производится измерение, которое зависит от конкретного типа используемого электродвигателя. В одном из примеров датчик делается имеющимся в распоряжении и используется для измерения линейного смещения тяги, приводимой в действие электродвигателем. В качестве альтернативы, электродвигатель может включать в себя кодовый датчик углового положения, размещенный внутри в электродвигателе. Измерительный преобразователь может быть присоединен к наиболее медленному поворотному элементу в электродвигателе, который присоединен к приводной тяге. Такой измерительный преобразователь может собирать измерения на полном диапазоне, на протяжении которого поворачивается элемент, который, например, может иметь значение 180 градусов. В этом случае, выходной сигнал измерительного преобразователя меняется по мере того, как вращается электродвигатель. В еще одном примере, электродвигатель включает в себя винт (например, шариковый винт), чье вращение может измеряться и использоваться для определения положения клапана регулятора давления наддува. Однако может использоваться другой измерительный преобразователь положения, в то время как шариковый винт или другой поворотный элемент может поворачиваться на протяжении диапазона, большего чем 180 и/или 360 градусов. Могут использоваться различные пригодные измерительные преобразователи, например, которые выявляют изменения углового положения в противоположность абсолютному положению.
Затем, на 320, падение напряжения на клеммах электродвигателя измеряется или определяется иным образом. В одном из примеров, провода считывания используются для подведения сигнала к аналого-цифровому преобразователю, чтобы определять напряжение на клеммах, которое подается в контроллер двигателя (например, контроллер 12 на фиг. 1). В качестве альтернативы, напряжение на клеммах может оцениваться на основании тока, получаемого электродвигателем, если эта величина известна или может быть измерена, или посредством нахождения разности между напряжением, приложенным к приводу, и противоЭДС (EMF), вырабатываемой приводом. Оценки напряжения дополнительно могут учитывать потери, обусловленные монтажными проводами и другими проводящими компонентами.
Затем, на 330, определяется электрический ток, получаемый электродвигателем. Это, например, может определяться с включением токового зонда или датчика тока. В качестве альтернативы, ток может рассчитываться на основании закона Ома в качестве отношения напряжения на приводе (например, напряжения на клеммах) и сопротивления привода, если эти две величины известны или могут быть измерены, и когда имеется в распоряжении справочная таблица сопротивлений/температур.
Затем, на 340, определяются силы потока, действующие на регулятор давления наддува (например, регулятор 26 давления наддува на фиг. 1). В одном из примеров, силы потока определяются на основании модели. В качестве альтернативы, перепад давления на регуляторе наддува рассчитывается и используется для определения сил потока. В еще одном примере, справочная таблица формируется с входными данными, включающими в себя положение регулятора давления наддува, чтобы определять силы потока. Такие способы могут применять использование одного или более датчиков или сигналов датчиков, расположенных в двигателе 200, в том числе, датчика 120 массового расхода воздуха, датчика 122 давления воздуха в коллекторе, сигнала TP положения дросселя, НАДДУВ с датчика 123 и сигнала частоты вращения турбонагнетателя, и по выбору может применять использование одного или более датчиков нагрузки.
Затем, на 350, определяется член магнитной поправки. Примерные способы, используемые для определения магнитного поля, подробнее описаны ниже, в особенности, со ссылкой на фиг. 4 и 5. Таким образом, электродвигатель может точно приводиться в действие и выдавать надлежащее давление наддува, гарантированное посредством учета изменения магнитного поля, вырабатываемого магнитами, включенными в электродвигатель, по мере того, как температура меняется по всему рабочему диапазону.
По мере того, как возрастает окружающая температура, или при относительно высокой первой температуре, магнитное поле может подавляться, а его величина уменьшаться. Соответственно, крутящий момент, достигаемый электродвигателем для заданного тока, также уменьшается. Такая потеря крутящего момента может компенсироваться повышением напряжения, амплитуды сигнала и/или относительной длительности включения, применяемых для приведения в действие электродвигателя, в то время как большая величина крутящего момента требуется для приведения в действие клапана регулятора давления наддува в достаточной мере. Наоборот, по мере того, как окружающая температура снижается, или при второй температуре, более низкой, чем первая температура, величина магнитного поля может быть большей. Крутящий момент, достигаемый электродвигателем для заданного тока, таким образом, может возрастать. Соответственно, напряжение, амплитуда сигнала и/или относительная длительность включения, применяемые для возбуждения электродвигателя, могут уменьшаться, по мере того, как требуется более низкая величина крутящего момента для приведения клапана регулятора давления наддува в достаточной мере. Различные способы могут применять использование одного или более пороговых значений(я), из условия, чтобы, когда окружающая температура находится выше порогового значения, напряжение или амплитуда сигнала увеличивались, и наоборот, уменьшались, когда температура находится ниже порогового значения. В некоторых вариантах осуществления, окружающая температура приближенно выражается посредством определения температуры магнитов электродвигателя. Как описано выше, магнитный поток, вырабатываемый магнитами электродвигателя, может быть функцией температуры его магнитов и может быть пропорциональным или обратно пропорциональным в зависимости от их состава материалов. Предполагается, что магнитный поток электрического привода меняется в обратной зависимости от температуры. Однако способы, описанные в материалах настоящей заявки, могут быть приспособлены для случая, в котором магнитный поток меняется пропорционально температуре.
В одном из примеров, магнитное поле определяется на основании известного уравнения F=BiL для случая, в котором ток перпендикулярен магнитному полю. Прежде всего, ток i, подводимый к электродвигателю, может определяться различными пригодными способами, в том числе, описанными выше. Сила F, прикладываемая электродвигателем, также может измеряться или определяться с использованием различных пригодных способов. Длина L токонесущего провода может рассчитываться заблаговременно на основании известных атрибутов электродвигателя. По этим величинам, магнитное поле B, вырабатываемое электродвигателем, может рассчитываться и использоваться для определения поправки на магнитное поле при приведении в действие регулятора давления наддува. Определенные величины, такие как усилие электродвигателя, могут не быть имеющимися в распоряжении или легко определяемыми. В таком случае, другие способы могут быть подходящими для определения магнитного поля электродвигателя, в том числе описанные ниже со ссылкой на фиг. 4 и 5.
В заключение, на 360, к электродвигателю прикладывается напряжение, заключающее в себе член магнитной поправки, тем самым, приводя в действие клапан регулятора давления наддува и подавая надлежащий наддув в двигатель. Например, сигнал с широтно-импульсной модуляцией может использоваться для приведения в действие клапана регулятора давления наддува. Например, относительная длительность включения увеличивалась бы по мере того, как возрастает температура, в одном из примеров.
Таким образом, регулятор давления наддува может точно управляться, гарантируя, что требуемый наддув выдается в двигатель, оставаясь реагирующим на условия эксплуатации и требования водителя. Кроме того, посредством регулировки привода регулятора давления наддува на основании магнитного поля и внесения поправки в регулировку на основании температуры магнита, можно учитывать изменение магнитного поля, обусловленное изменением температуры, и тем самым, точнее регулировать крутящий момент и, соответственно, положение регулятора давления наддува.
Далее, с обращением к фиг. 4, показан примерный способ 401, дающий дополнительные подробности действий, выполняемых на 350. Более точно, способ 401 опосредованно определяет магнитное поле, вырабатываемое магнитами электродвигателя.
Способ 401 начинается на 410, где определяется положение электродвигателя. Как описано выше, электродвигатель может включать в себя кодовый датчик положения, из которого может получаться положение электродвигателя, хотя другой пригодный способ для определения положения электродвигателя может применяться, не выходя из объема настоящего раскрытия.
Затем, на 420, определяется угловая скорость электродвигателя. Различные пригодные способы могут применяться для определения угловой скорости, не выходя из объема настоящего раскрытия. В примере кодового датчика положения, угловая скорость электродвигателя может рассчитываться посредством деления полученного углового положения на ассоциативно связанный временной интервал. Может рассчитываться мгновенная угловая скорость или, в качестве альтернативы, угловая скорость может усредняться по времени на многочисленных измерительных точках или фильтроваться иным образом.
Затем, на 430, напряжение на клеммах, приложенное к щеткам электродвигателя, определяется, как описано выше. Напряжение на клеммах может помогать в оценке магнитного поля электродвигателя, так как напряжение на клеммах может быть приближенно выражено в качестве являющегося пропорциональным производной  по времени, магнитному потоку магнитов электродвигателя и угловой скорости электродвигателя. Кроме того, магнитное поле электродвигателя может приближенно выражаться умножением на площадь полюсов электродвигателя.
по времени, магнитному потоку магнитов электродвигателя и угловой скорости электродвигателя. Кроме того, магнитное поле электродвигателя может приближенно выражаться умножением на площадь полюсов электродвигателя.
Затем, на 440, формируется справочная таблица с угловой скоростью электродвигателя и напряжением на клеммах, подаваемым в качестве входных данных.
Затем, на 450, справочная таблица, сформированная на 440, выводит и оценивает температуру магнитов электродвигателя, угловую скорость электродвигателя и магнитное поле электродвигателя.
В заключение, на 460, фактический крутящий момент электродвигателя может оцениваться для заданного тока при данной рабочей температуре электродвигателя. Крутящий момент электродвигателя может подаваться в контроллер положения электродвигателя для улучшения точности управления положением электродвигателя и, таким образом, управления положением регулятора давления наддува.
Фиг. 5 показывает альтернативный способ 501 для выполнения этапа 350 способа 301. Более точно, способ 501 измеряет температуру поблизости от магнитов электродвигателя и использует это измерение для оценки магнитного поля, вырабатываемого электродвигателем.
На этапе 510 способа 501, сопротивление обмотки электродвигателя рассчитывается на основании следующего соотношения: V=i2R+K(d/dt)+Vbrush, где V - напряжение на клеммах, i - ток электродвигателя, R - сопротивление обмотки, K - постоянная, - магнитный поток, t - время, а Vbrush - падение давления на щетке. В некоторых вариантах осуществления, Vbrush может иметь значение 0,7 В на каждую щетку, хотя эта информация может получаться из предыдущих испытаний электродвигателя или технических условий на электродвигатель. В случае, где электродвигатель не находится в движении, член потока может быть опущен, и соотношение сокращается до V=i2R+Vbrush. Имея определенные вышеприведенные величины, получается R и оценивается сопротивление обмотки.
На 520, температура магнита оценивается при условии, что сопротивление обмоток меняется в качестве функции температуры. В качестве примера, сопротивление меди изменяется на 0,4% на каждый градус Цельсия, хотя соотношение R=Ri(1+α(ΔT) может использоваться для определения, каким образом сопротивление обмотки изменяется в зависимости от температуры, где R - сопротивление обмотки, Ri - сопротивление обмотки при начальной температуре, α - коэффициент расширения, специфичный материалу обмотки, а ΔT - изменение температуры. По определенному процентному изменению сопротивления на градус и рассчитанному сопротивлению обмотки, оценивается температура обмотки. Так как обмотки электродвигателя находятся в непосредственной близости от магнитов электродвигателя, температура магнитов может оцениваться по температуре проводов в одном из примеров.
На 530, справочная таблица формируется и используется для оценки магнитного поля электродвигателя.
Таким образом, нежелательная работа турбонагнетателя и двигателя, обусловленные ухудшенным управлением регулятора давления наддува, вытекающим из изменения магнитного поля привода регулятора давления наддува в качестве функции температуры, может уменьшаться и/или устраняться. По мере того, как возрастает окружающая температура, или при относительно высокой первой температуре, магнитное поле может подавляться, а его величина уменьшаться. Соответственно, крутящий момент, достигаемый электродвигателем для заданного тока, также уменьшается. Такая потеря крутящего момента может компенсироваться повышением напряжения, амплитуды сигнала и/или относительной длительности включения, применяемых для приведения в действие электродвигателя, в то время как большая величина крутящего момента требуется для приведения в действие клапана регулятора давления наддува в достаточной мере. Наоборот, по мере того, как окружающая температура снижается, или при второй температуре, более низкой, чем первая температура, величина магнитного поля может быть большей. Крутящий момент, достигаемый электродвигателем для заданного тока, таким образом, может возрастать. Соответственно, напряжение, амплитуда сигнала и/или относительная длительность включения, применяемые для приведения в действие электродвигателя, могут уменьшаться, по мере того, как требуется более низкая величина крутящего момента для приведения клапана регулятора давления наддува в достаточной мере.
Отметим, что примерные способы управления и оценки, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Специфичные способы, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия могут графически представлять код, который должен быть запрограммирован на машиночитаемый запоминающий носитель в системе управления двигателем.
Будет принято во внимание, что конфигурации и способы, раскрытые в материалах настоящей заявки, являются примерными по сути, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Объект патентования настоящего раскрытия включает в себя все новейшие и неочевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут ссылаться на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в объект патентования настоящего раскрытия.

Изобретение относится к способу для управления устройством турбонагнетателя двигателя внутреннего сгорания. Предусмотрены различные способы для управления регулятором давления наддува с приводом, имеющим зависящее от температуры магнитное поле. В одном из примеров магнитное поле оценивается на основании условий эксплуатации и других параметров и используется для применения магнитной поправки к напряжению, подаваемому на привод. Способы могут обеспечивать точное управление регулятором давления наддува в присутствии переменных магнитных полей, гарантируя надлежащую подачу наддува в двигатель. Техническим результатом является повышение точности. 3 н. и 10 з.п. ф-лы, 5 ил.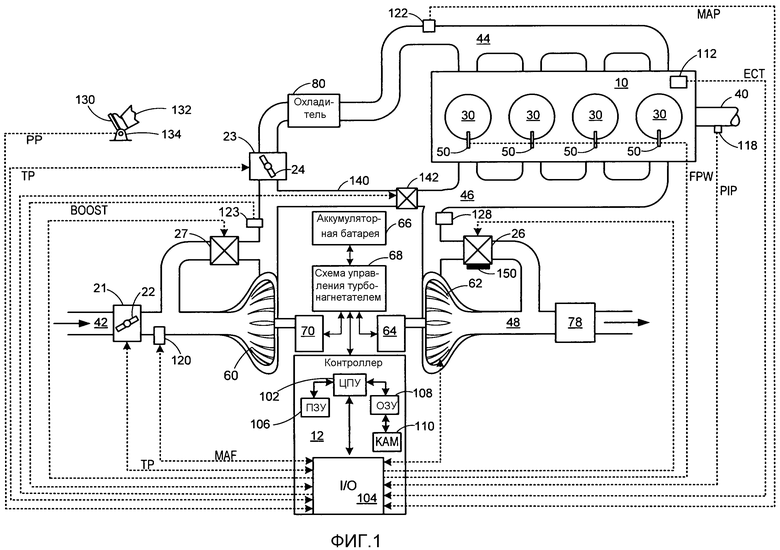
1. Способ, состоящий в том, что:
регулируют привод регулятора давления наддува, присоединенный к клапану регулятора давления наддува на выпуске двигателя, для управления уровнем наддува двигателя у двигателя, причем в регулировку, основанную на магнитном поле магнита в приводе регулятора давления наддува, вносят поправку на основании температуры магнита;
при этом регулировка заключается в том, что регулируют ток, подаваемый на привод, и
при этом регулировка дополнительно основана на сопротивлении обмотки привода, причем упомянутое сопротивление основано на температуре магнита.
2. Способ по п. 1, в котором температуру магнита оценивают на основании температуры отработавших газов двигателя и одного или более условий эксплуатации двигателя.
3. Способ по п. 2, в котором регулировка дополнительно заключается в том, что для первого материала уменьшают ток для заданного крутящего момента привода, когда температура магнита находится выше порогового значения, и увеличивают ток для заданного крутящего момента, когда температура магнита находится ниже порогового значения, а для второго материала увеличивают ток для заданного крутящего момента привода, когда температура магнита находится выше порогового значения, и уменьшают ток для заданного крутящего момента, когда температура магнита находится ниже порогового значения.
4. Способ по п. 3, в котором магнитное поле оценивают на основании справочной таблицы, имеющей входные данные, включающие в себя положение привода, угловую скорость привода и напряжение на клеммах привода.
5. Способ по п. 3, в котором магнитное поле оценивают на основании справочной таблицы, причем справочная таблица сформирована на основании одного или более из тока привода, напряжения на клеммах привода, напряжения на щетках привода, оцененного сопротивления проводов привода, изменения сопротивления привода и оцененной температуры проводов привода.
6. Способ управления турбонагнетателем двигателя посредством электрического привода, состоящий в том, что:
оценивают температуру магнита у одного или более магнитов, расположенных в электрическом приводе;
оценивают магнитное поле одного или более магнитов на основании оцененной температуры магнита;
определяют поправку на магнитное поле на основании оцененного магнитного поля;
эксплуатируют электрический привод на токе, определенном на основании поправки на магнитное поле; и
регулируют поправку на магнитное поле на основании изменения оцененной температуры магнита;
при этом температуру магнита оценивают на основании температуры отработавших газов двигателя и одного или более условий эксплуатации двигателя.
7. Способ по п. 6, в котором привод включает в себя постоянные магниты, и при этом магнитное поле оценивают на основании справочной таблицы, имеющей входные данные, включающие в себя положение привода, угловую скорость привода и напряжение на клеммах привода.
8. Способ по п. 7, в котором привод присоединен к регулятору давления наддува турбонагнетателя, и при этом поправка на магнитное поле дополнительно основана на сопротивлении обмотки привода.
9. Способ по п. 8, в котором положением регулятора давления наддува управляют в соответствии с требуемым положением на основании поправки на магнитное поле, и при этом сопротивление обмотки привода основано на температуре магнита.
10. Способ по п. 9, в котором требуемое положение основано на требуемом уровне наддува двигателя.
11. Способ по п. 10, дополнительно состоящий в том, что осуществляют непосредственный впрыск топлива в цилиндр двигателя.
12. Способ управления регулятором давления наддува турбонагнетателя двигателя посредством электрического привода, состоящий в том, что:
при первой температуре электрического привода,
регулируют электрический привод на основании поправки на напряжение повышенного магнитного поля привода; и
при второй, более низкой температуре электрического привода,
регулируют электрический привод на основании поправки на напряжение пониженного магнитного поля привода;
при этом электрический привод включает в себя магниты;
при этом электрический привод регулируют посредством того, что регулируют относительную длительность включения, подаваемую на электрический привод из контроллера, причем контроллер включает в себя команды для выполнения действий по регулировке, и относительная длительность включения увеличивается при упомянутой первой температуре и уменьшается при упомянутой второй температуре.
13. Способ по п. 12, в котором регулятор давления наддува регулируют для поддержания требуемого уровня наддува на впуске двигателя.
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2243386C2 |
| Устройство для регулирования подачи воздуха в двигатель внутреннего сгорания | 1989 |
|
SU1746016A1 |
| US 5771884 A1 30.06.1998 | |||
| US 20120001104 A1 05.01.2012 | |||
| US 20110076166 A1 31.03.2011. | |||

