В настоящей заявке испрашивается приоритет по заявке на патент Китая №201510745112.4, поданной 5 ноября 2015 г., содержание которой в полном объеме включено в настоящий документ путем ссылки.
Область техники
Настоящее изобретение, в целом, относится к терминалам, в частности, к способу и устройству взаимного изменения положений значков.
Уровень техники
С развитием терминалов, появляется возможность установки в них всё большего количества разнообразных прикладных программ, и, соответственно, всё больше и больше значков прикладных программ должно отображаться на дисплее терминала. В результате, обеспечение пользователю удобства в управлении множеством значков прикладных программ является в данной области техники важной технической задачей.
В настоящее время для управления значками прикладных программ пользователь терминала может задавать положения отображения значков в соответствии со своими потребностями за счет использования сенсорного экрана терминала. Например, пользователь может сдвинуть два значка для взаимного изменения положений указанных двух значков. Однако, такой способ взаимного изменения положений значков не обеспечивает достаточно точное распознавание намерения выполнить операцию, что может впоследствии привести к ложному срабатыванию.
Раскрытие изобретения
Для решения проблемы, существующей в связанной технологии, в настоящем изобретении предложены способ и устройство взаимного изменения положений значков.
Согласно первому аспекту в настоящем изобретении предложен способ взаимного изменения положений значков, содержащий следующие этапы:
принимают первый сигнал сдвига и второй сигнал сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка;
определяют первый вектор сдвига в соответствии с первым сигналом сдвига, а также определяют второй вектор сдвига в соответствии со вторым сигналом сдвига;
оценивают, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и
осуществляют взаимное изменение положений первого значка и второго значка, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию.
В одном из вариантов осуществления настоящего изобретения определение первого вектора сдвига в соответствии с первым сигналом сдвига и определение второго вектора сдвига в соответствии со вторым сигналом сдвига предусматривает: определение исходного положения операции перетаскивания, связанной с первым сигналом сдвига, в качестве начальной точки первого вектора сдвига, и определение положения остановки операции перетаскивания, связанной с первым сигналом сдвига, в качестве конечной точки первого вектора сдвига, а также определение исходного положения операции перетаскивания, связанной со вторым сигналом сдвига, в качестве начальной точки первого вектора сдвига, и определение положения остановки операции перетаскивания, связанной со вторым сигналом сдвига, в качестве конечной точки первого вектора сдвига.
В другом предпочтительном варианте осуществления настоящего изобретения оценка того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига, предусматривает: получение информации о расстоянии между положением отображения первого значка и положением отображения второго значка, и, если числовое соотношение между указанным расстоянием, длиной первого вектора сдвига и длиной второго вектора сдвига удовлетворяет по меньшей мере одному предварительно заданному числовому соотношению, определение того, что первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию, причем указанное по меньшей мере одно предварительно заданное числовое соотношение включает в себя следующее:
отношение длины первого вектора сдвига к указанному расстоянию превышает первое предварительно заданное значение;
отношение длины второго вектора сдвига к указанному расстоянию превышает второе предварительно заданное значение; и
отношение суммы длины первого вектора сдвига и длины второго вектора сдвига к указанному расстоянию превышает третье предварительно заданное значение.
В еще одном предпочтительном варианте осуществления настоящего изобретения перед оценкой того, удовлетворяют или нет первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига, указанный способ может дополнительно предусматривать: оценку того, являются ли первый сигнал сдвига и второй сигнал сдвига встречно движущимися сигналами сдвига в соответствии с направлением первого вектора сдвига и направлением второго вектора сдвига; и если первый вектор сдвига и второй вектор сдвига являются встречно движущимися сигналами сдвига, выполнение этапа оценки того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию, а если первый сигнал сдвига и второй сигнал сдвига не являются встречно движущимися сигналами сдвига, прекращение процесса взаимного изменения положений значков.
В другом предпочтительном варианте осуществления настоящего изобретения оценка того, являются ли первый сигнал сдвига и второй сигнал сдвига встречно движущимися сигналами сдвига в соответствии с направлением первого вектора сдвига и направлением второго вектора сдвига, может предусматривать: определение линии, соединяющей положение отображения интерфейса первого значка и положение отображения интерфейса второго значка, в качестве отсчётной линии; получение информации об угле между направлением первого вектора сдвига и указанной отсчётной линией в качестве первого угла, и получение информации об угле между направлением второго вектора сдвига и указанной отсчётной линией в качестве второго угла; и, если указанный первый угол находится в пределах первого предварительно заданного углового диапазона и указанный второй угол находится в пределах второго предварительно заданного углового диапазона, определение того, что первый сигнал сдвига и второй сигнал сдвига являются встречно движущимися сигналами сдвига.
Согласно второму аспекту в настоящем изобретении предложено устройство взаимного изменения положений значков, содержащее:
приёмный модуль, выполненный с возможностью приёма первого сигнала сдвига и второго сигнала сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка;
определяющий модуль, выполненный с возможностью определения первого вектора сдвига в соответствии с первым сигналом сдвига, а также определения второго вектора сдвига в соответствии со вторым сигналом сдвига;
оценочный модуль, выполненный с возможностью оценки того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и
взаимозаменяющий модуль, выполненный с возможностью взаимного изменения положений первого значка и второго значка, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию.
В одном из предпочтительных вариантов осуществления настоящего изобретения указанный определяющий модуль выполнен с возможностью:
определения исходного положения операции перетаскивания, связанной с первым сигналом сдвига, в качестве начальной точки первого вектора сдвига, и определения положения остановки операции перетаскивания, связанной с первым сигналом сдвига, в качестве конечной точки первого вектора сдвига, и
определения исходного положения операции перетаскивания, связанной со вторым сигналом сдвига, в качестве начальной точки первого вектора сдвига, и определения положения остановки операции перетаскивания, связанной со вторым сигналом сдвига, в качестве конечной точки первого вектора сдвига.
В другом предпочтительном варианте осуществления настоящего изобретения, указанный оценочный модуль выполнен с возможностью:
получения информации о расстоянии между положением отображения первого значка и положением отображения второго значка, и
определения того, что первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию, если числовое соотношение между указанным расстоянием, длиной первого вектора сдвига и длиной второго вектора сдвига удовлетворяет по меньшей мере одному предварительно заданному числовому соотношению,
причем указанное по меньшей мере одно предварительно заданное числовое соотношение включает в себя следующее:
отношение длины первого вектора сдвига к указанному расстоянию превышает первое предварительно заданное значение;
отношение длины второго вектора сдвига к указанному расстоянию превышает второе предварительно заданное значение; и
отношение суммы длины первого вектора сдвига и длины второго вектора сдвига к указанному расстоянию превышает третье предварительно заданное значение.
В еще одном предпочтительном варианте осуществления настоящего изобретения указанный оценочный модуль также выполнен с возможностью:
оценки того, являются ли первый сигнал сдвига и второй сигнал сдвига встречно движущимися сигналами сдвига в соответствии с направлением первого вектора сдвига и направлением второго вектора сдвига, и
выполнения этапа оценки того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию, если первый вектор сдвига и второй вектор сдвига являются встречно движущимися сигналами сдвига, и
прекращения процесса взаимного изменения положений значков, если первый сигнал сдвига и второй сигнал сдвига не являются встречно движущимися сигналами сдвига.
В другом предпочтительном варианте осуществления настоящего изобретения указанный оценочный модуль выполнен с возможностью:
определения линии, соединяющей положение отображения интерфейса первого значка и положение отображения интерфейса второго значка, в качестве отсчётной линии;
получения информации об угле между направлением первого вектора сдвига и указанной отсчётной линией в качестве первого угла,
получения информации об угле между направлением второго вектора сдвига и указанной отсчётной линией в качестве второго угла; и
определения того, что первый сигнал сдвига и второй сигнал сдвига являются сигналами сдвига, движущимися друг к другу, если указанный первый угол находится в пределах первого предварительно заданного углового диапазона и указанный второй угол находится в пределах второго предварительно заданного углового диапазона.
Согласно третьему аспекту в настоящем изобретении предложено устройство взаимного изменения положений значков, содержащее:
процессор, и
память, предназначенную для хранения инструкций, исполняемых указанным процессором,
причем указанный процессор выполнен с возможностью:
приёма первого сигнала сдвига и второго сигнала сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка;
определения первого вектора сдвига в соответствии с первым сигналом сдвига, а также определения второго вектора сдвига в соответствии со вторым сигналом сдвига;
оценки того, удовлетворяют или нет первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и
осуществления взаимного изменения положений первого значка и второго значка, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию.
Технические решения, предложенные в настоящем изобретении, обеспечивают следующие преимущества.
В соответствии с предложенным в настоящем изобретении способом взаимного изменения положений значков принимают первый сигнал сдвига и второй сигнал сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка; определяют первый вектор сдвига в соответствии с первым сигналом сдвига, а также определяют второй вектор сдвига в соответствии со вторым сигналом сдвига; оценивают, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и осуществляют взаимное изменение положений первого значка и второго значка, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию. За счет внедрения указанного способа взаимного изменения положений значков, положения первого значка и второго значка можно менять, только если первый сигнал сдвига и второй сигнал сдвига удовлетворяют предварительно заданному условию в процессе взаимного изменения положений значков, благодаря чему удается избежать ошибочного распознавания случайной операции перетаскивания в качестве операции взаимного изменения положений значков, при этом повышается точность распознавания намерения выполнить операцию взаимного изменения положений значков.
Следует понимать, что как и приведенный выше раздел описания «Раскрытие изобретения», так и последующий подробный раздел описания «Осуществление изобретения» представлены лишь в качестве примера и не ограничивают настоящее изобретение.
Краткое описание чертежей
Прилагаемые чертежи, включенные в состав описания и образующие его часть, иллюстрируют предпочтительные варианты осуществления настоящего изобретения и совместно с настоящим описанием служат для пояснения принципов настоящего изобретения.
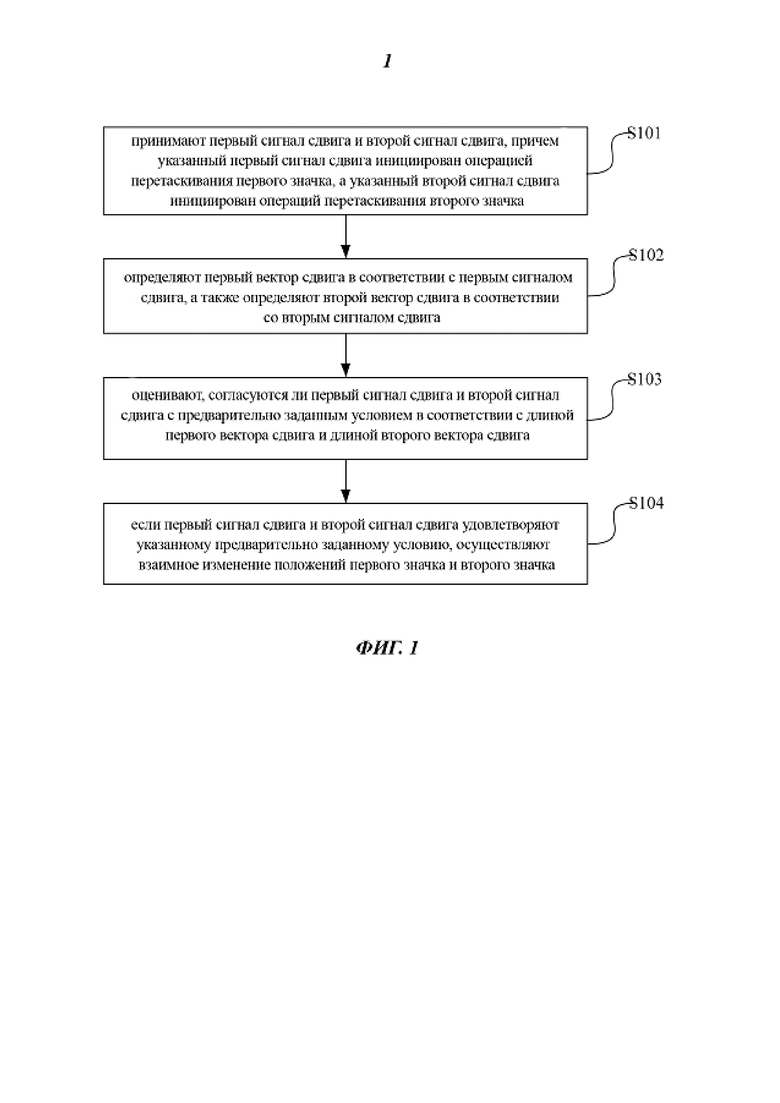
На фиг. 1 показана блок-схема, иллюстрирующая способ взаимного изменения положений значков в соответствии с одним из предпочтительных вариантов осуществления настоящего изобретения.
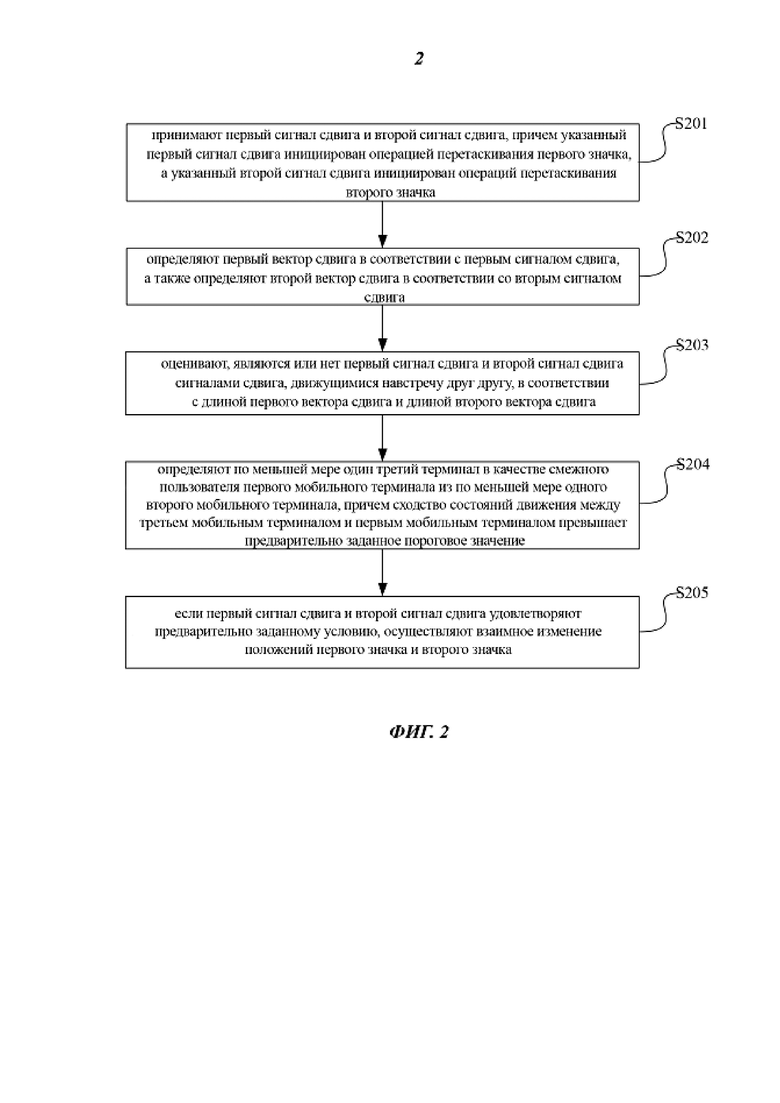
На фиг. 2 показана блок-схема, иллюстрирующая способ взаимного изменения положений значков в соответствии с еще одним предпочтительным вариантом осуществления настоящего изобретения.
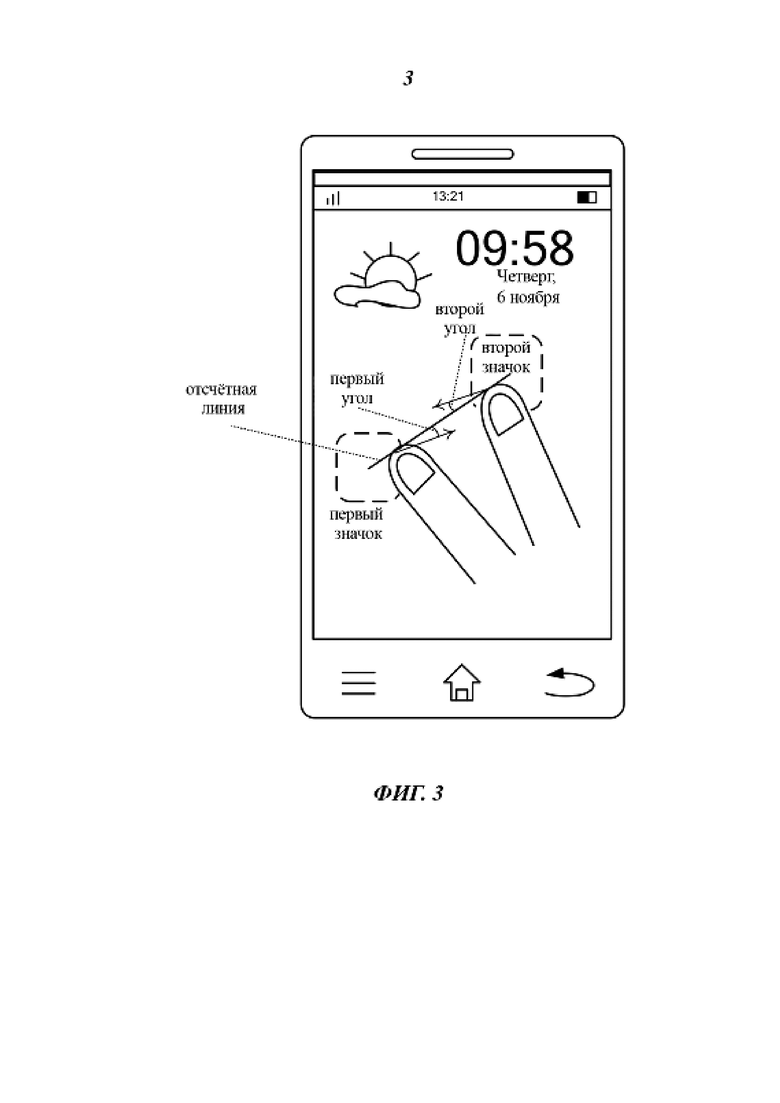
На фиг. 3 схематично проиллюстрированы действия в процессе взаимного изменения положений значков в соответствии с одним из предпочтительных вариантов осуществления настоящего изобретения
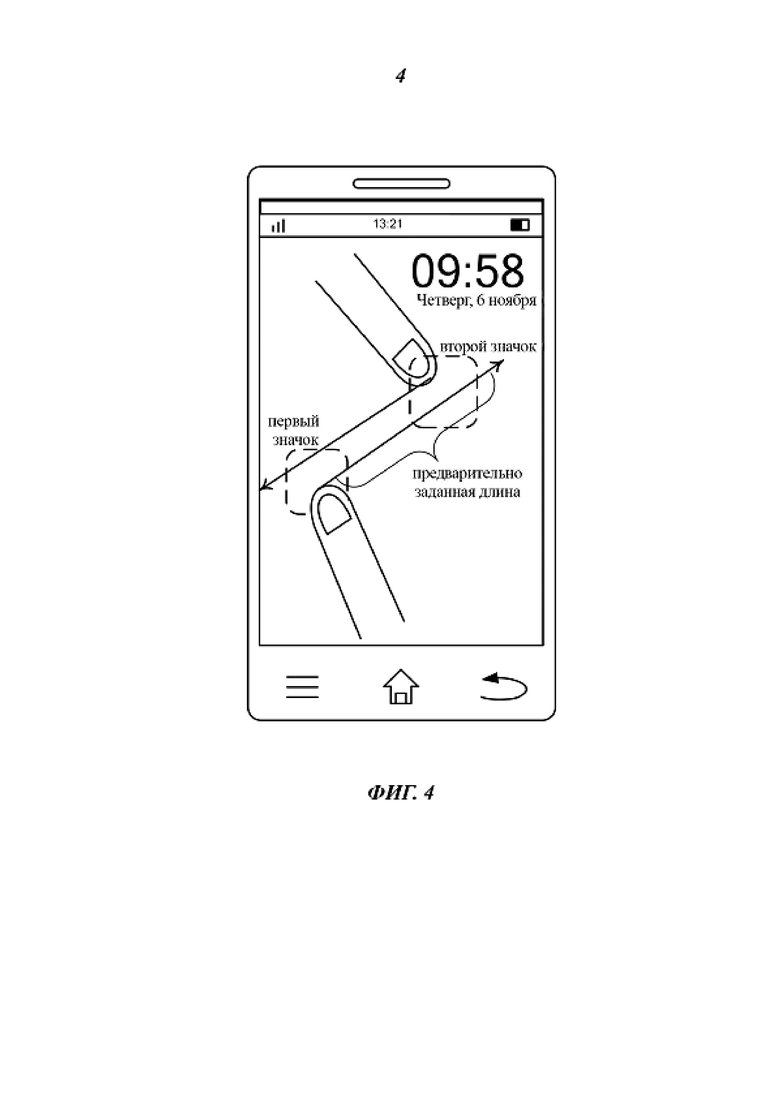
На фиг. 4 схематично проиллюстрированы действия в процессе взаимного изменения положений значков в соответствии с еще одним предпочтительным вариантом осуществления настоящего изобретения
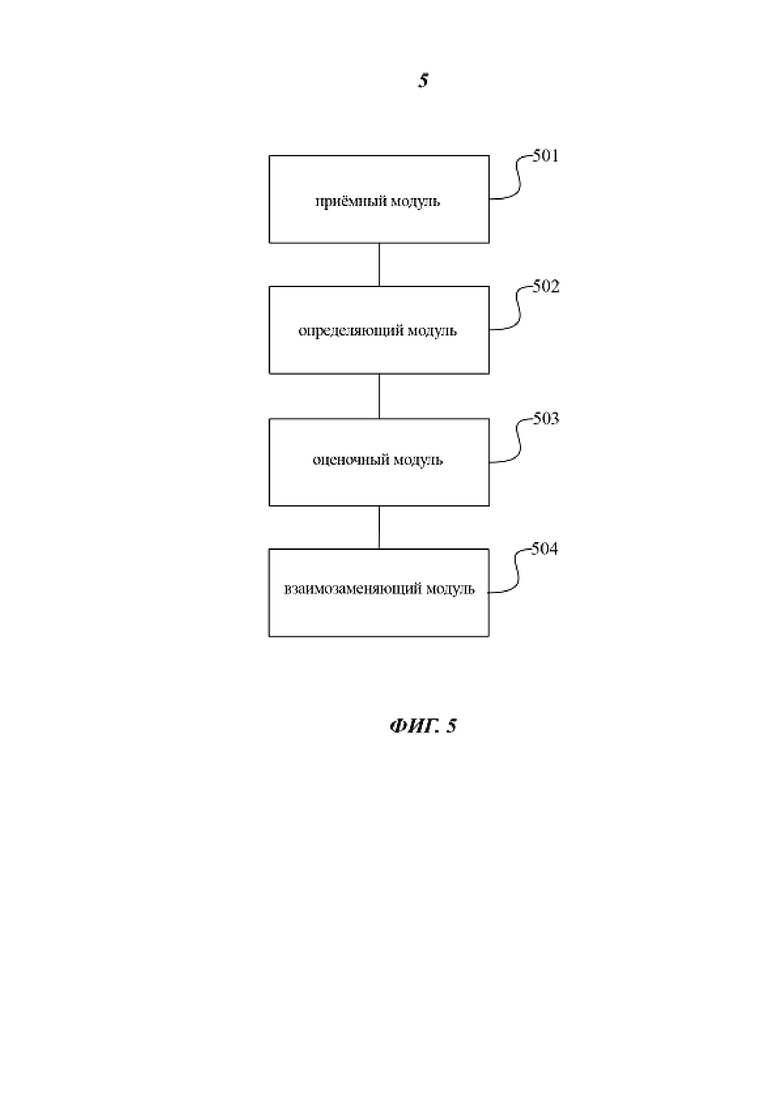
На фиг. 5 схематично показано устройство взаимного изменения положений значков в соответствии с одним из предпочтительных вариантов осуществления настоящего изобретения.
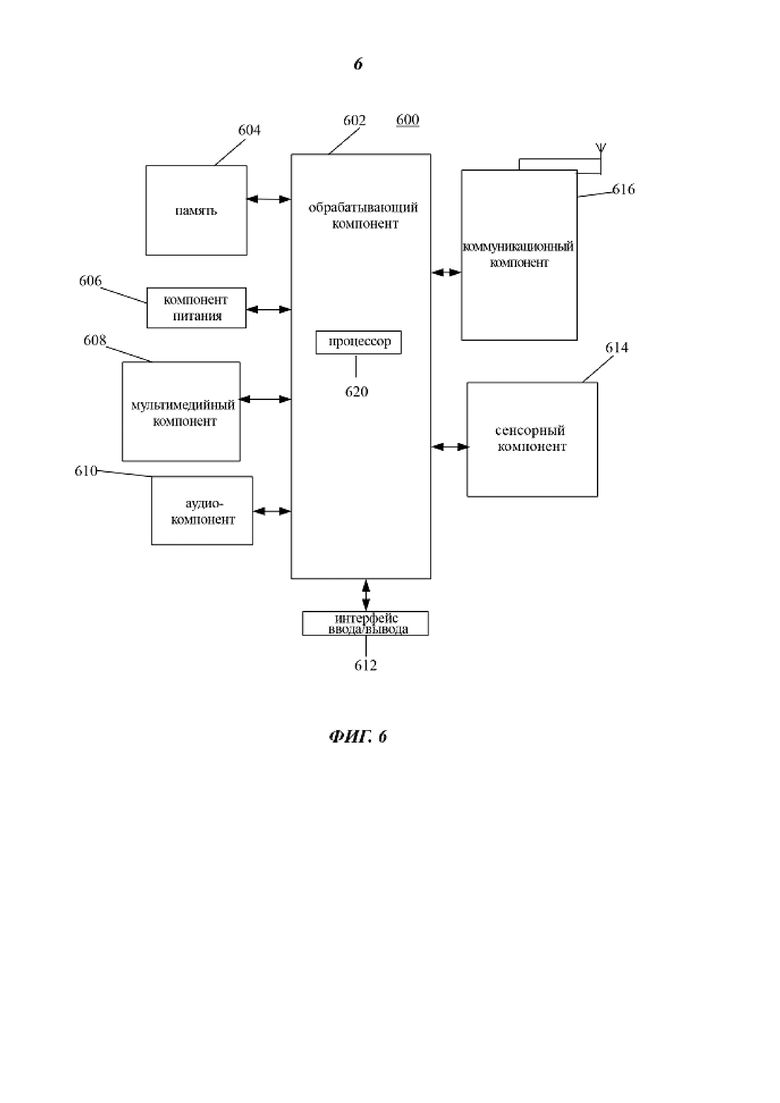
На фиг. 6 схематично показано устройство 600 взаимного изменения положений значков в соответствии с еще одним предпочтительным вариантом осуществления настоящего изобретения.
Осуществление изобретения
Далее, для того чтобы пояснить задачи, технические решения и преимущества настоящего изобретения, приведено подробное описание предпочтительных вариантов его осуществления со ссылкой на прилагаемые чертежи.
На фиг. 1 показана блок-схема, иллюстрирующая способ взаимного изменения положений значков в соответствии с одним из предпочтительных вариантов осуществления настоящего изобретения. Как показано на фиг. 1, указный способ содержит следующие этапы.
Этап 101, на котором принимают первый сигнал сдвига и второй сигнал сдвига. Указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка.
Этап 102, на котором определяют первый вектор сдвига в соответствии с первым сигналом сдвига, а также определяют второй вектор сдвига в соответствии со вторым сигналом сдвига.
Этап 103, на котором оценивают, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига.
Этап 104, на котором, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию, осуществляют взаимное изменение положений первого значка и второго значка.
В соответствии с предложенным в настоящем изобретении способом взаимного изменения положений значков, положения первого значка и второго значка изменяют только, если первый сигнал сдвига и второй сигнал сдвига согласуются с предварительно заданным условием в процессе взаимного изменения положений значков, благодаря чему удается избежать ошибочного распознавания случайной операции перетаскивания в качестве операции взаимного изменения положений значков, при этом повышается точность распознавания намерения выполнить операцию взаимного изменения положений значков.
В одном из вариантов осуществления настоящего изобретения определение первого вектора сдвига в соответствии с первым сигналом сдвига и определение второго вектора сдвига в соответствии со вторым сигналом сдвига предусматривает: определение исходного положения операции перетаскивания, связанной с первым сигналом сдвига, в качестве начальной точки первого вектора сдвига, и определение положения остановки операции перетаскивания, связанной с первым сигналом сдвига, в качестве конечной точки первого вектора сдвига, а также определение исходного положения операции перетаскивания, связанной со вторым сигналом сдвига, в качестве начальной точки первого вектора сдвига, и определение положения остановки операции перетаскивания, связанной со вторым сигналом сдвига, в качестве конечной точки первого вектора сдвига.
В другом предпочтительном варианте осуществления настоящего изобретения, оценка того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига, предусматривает: получение информации о расстоянии между положением отображения первого значка на интерфейсе и положением отображения второго значка на интерфейсе. Если числовое соотношение между указанным расстоянием, длиной первого вектора сдвига и длиной второго вектора сдвига удовлетворяет по меньшей мере одному предварительно заданному соотношению, определяют, что первый сигнал сдвига и второй сигнал сдвига удовлетворяют предварительно заданному условию. Указанное по меньшей мере одно предварительно заданное числовое соотношение включает в себя следующее:
отношение длины первого вектора сдвига к указанному расстоянию превышает первое предварительно заданное значение;
отношение длины второго вектора сдвига к указанному расстоянию превышает второе предварительно заданное значение; и
отношение суммы длины первого вектора сдвига и длины второго вектора сдвига к указанному расстоянию превышает третье предварительно заданное значение.
В еще одном предпочтительном варианте осуществления настоящего изобретения перед оценкой того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига, оценивают то, являются ли первый сигнал сдвига и второй сигнал сдвига сигналами сдвига, обозначающими первую и вторую операции перетаскивания, и движутся ли они встречно друг другу в соответствии с направлением первого вектора сдвига и направления второго вектора сдвига. Если первый вектор сдвига и второй вектор сдвига являются встречно движущимися сигналами сдвига, то выполняют оценку того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию. С другой стороны, если первый сигнал сдвига и второй сигнал сдвига не являются встречно движущимися сигналами сдвига, то положения первого и второго значков не меняют.
В другом предпочтительном варианте осуществления настоящего изобретения оценка того, являются ли первый сигнал сдвига и второй сигнал сдвига встречно движущимися сигналами сдвига в соответствии с направлением первого вектора сдвига и направлением второго вектора сдвига, предусматривает: определение линии, соединяющей положение отображения первого значка и положение отображения второго значка, в качестве отсчётной линии; получение информации об угле между направлением первого вектора сдвига и указанной отсчётной линией в качестве первого угла, и получение информации об угле между направлением второго вектора сдвига и указанной отсчётной линией в качестве второго угла. Если указанный первый угол находится в пределах первого предварительно заданного углового диапазона и указанный второй угол находится в пределах второго предварительно заданного углового диапазона, то определяют, что первый сигнал сдвига и второй сигнал сдвига являются встречно движущимися сигналами сдвига.
На фиг. 2 показана блок-схема, иллюстрирующая способ взаимного изменения положений значков в соответствии с еще одним предпочтительным вариантом осуществления настоящего изобретения. Указанный способ можно применить в отношении терминала. Как показано на фиг. 2, указанный способ содержит следующие этапы.
Этап 201, на котором принимают первый сигнал сдвига и второй сигнал сдвига. Указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка.
В одном из вариантов осуществления настоящего изобретения, пользователь выполняет операции перетаскивания на сенсорном экране терминала для инициирования сигналов сдвига. Когда сенсорный экран представляет собой емкостный сенсорный экран, то в точке касания, в которой палец прикасается к емкостному сенсорному экрану, формируется емкостная связь. Высокочастотный ток вырабатывается между емкостной связью и каждым из множества электродов в различных местах. Сила высокочастотного тока пропорциональна расстоянию между точкой касания и соответствующим электродом. Таким образом, координату положения точки касания можно определить путем измерения силы высокочастотного тока, вырабатываемого в каждом из множества электродов, для определения расстояния между указанной точкой касания и электродом. Если координата положения точки касания соответствует положению отображения значка, то считается, что касание связано с операцией над значком. Если палец выполняет операцию перетаскивания из точки касания, то точка касания на емкостном сенсорным экране будет непрерывно меняться, и координата положения точки касания также будет непрерывно меняться. Таким образом, если координата положения точки касания непрерывно меняется, то происходит инициирование сигнала сдвига.
Следует отметить, что упомянутое выше инициирование сигнала сдвига раскрыто для примера только в отношении варианта применения с емкостным сенсорным экраном, причем на практике сигнал сдвига может также быть инициирован на сенсорным экране на основе других форм, например, сопротивления, инфракрасной области спектра и поверхностной акустической волны. Кроме того, упомянутое выше инициирование сигнала сдвига раскрыто для примера только в отношении варианта применения с выполнением операции перетаскивания пальцем, причем на практике сигнал сдвига может быть инициирован путем операции перетаскивания, выполняемой другим устройством, например, стилусом. Настоящее изобретение не ограничивается способами инициирования сигнала сдвига.
Инициирование первого сигнала сдвига и второго сигнала сдвига может быть синхронно обнаружено на основе многосенсорной технологии. В одном из вариантов осуществления настоящего изобретения первый сигнал сдвига и второй сигнал сдвига рассматриваются в качестве сигналов, которые инициируются одновременно. Однако, на практике, может существовать конкретная погрешность в оценке одновременного инициирования. Например, если интервал между временем инициирования первого сигнала сдвига и временем инициирования второго сигнала сдвига меньше предварительно заданного значения, то определяют, что первый сигнал сдвига и второй сигнал сдвига являются сигналами, инициированными одновременно.
Этап 202, на котором определяют первый вектор сдвига в соответствии с первым сигналом сдвига, а также определяют второй вектор сдвига в соответствии со вторым сигналом сдвига.
Для точного распознавания намерения выполнить операцию со значком, на указанном этапе в рассматриваемом варианте осуществления настоящего изобретения определяют векторы сдвига сигналов сдвига, причем каждый из векторов сдвига предназначен для обозначения длины и направления соответствующей операции перетаскивания, которая инициирует соответствующие сигналы сдвига для дальнейшей оценки намерения выполнить операцию на основании длины и направления на следующем этапе, так чтобы повысить точность распознавания намерения выполнить операцию.
В рассматриваемом варианте осуществления настоящего изобретения способ определения векторов сдвига сигналов сдвига может быть реализован следующим образом.
Исходное положение операции перетаскивания, связанной с первым сигналом сдвига, определяют в качестве начальной точки первого вектора сдвига, а положение остановки операции перетаскивания, связанной с первым сигналом сдвига, определяют в качестве конечной точки первого вектора сдвига. По аналогии, исходное положение операции перетаскивания, связанной со вторым сигналом сдвига, определяют в качестве начальной точки первого вектора сдвига, а положение остановки операции перетаскивания, связанной со вторым сигналом сдвига, определяют в качестве конечной точки первого вектора сдвига.
Если пользователь использует палец для выполнения операции перетаскивания по сенсорному экрану, то место, с которого палец начинает соприкасаться с сенсорным экраном, является исходным положением операции перетаскивания. Далее пользователь перемещает палец по сенсорному экрану, удерживая палец в соприкосновении с сенсорным экраном. Когда палец отходит от сенсорного экрана, место, в котором палец отходит от сенсорного экрана, является положением остановки операции перетаскивания.
Этап 203, на котором оценивают, являются ли первый сигнал сдвига и второй сигнал сдвига встречно движущимися сигналами сдвига в соответствии с направлением первого вектора сдвига и направлением второго вектора сдвига.
Для того чтобы избежать ошибочного распознавания операции перетаскивания в случайном направлении в качестве операции взаимного изменения положений значков, в рассматриваемом варианте осуществления настоящего изобретения оценивают направления векторов сдвига, причем взаимное изменение положений значков осуществляют только тогда, когда направления векторов сдвига согласуются с предварительно заданным условием.
В рассматриваемом варианте осуществления настоящего изобретения, если первый сигнал сдвига и второй сигнал сдвига являются встречно движущимися сигналами сдвига, то выполняют этап 204. С другой стороны, если первый сигнал сдвига и второй сигнал сдвига не являются встречно движущимися, то положения первого и второго значка не меняют.
Встречно движущиеся сигналы сдвига относятся к двум сигналам сдвига, направления перетаскивания которых проходят друг к другу, причем в рассматриваемом варианте осуществления настоящего изобретении обеспечен по меньшей мере один конкретный вариант способа оценки того, являются ли два сигнала сдвига встречно движущимися сигналами сдвига, который предусматривает следующее:
определение линии, соединяющей положение отображения первого значка и положение отображения второго значка, в качестве отсчётной линии. При этом получают информацию об угле между направлением первого вектора сдвига и указанной отсчётной линией в качестве первого угла, а также получают информацию об угле между направлением второго вектора сдвига и указанной отсчётной линией в качестве второго угла. Например, как показано на фиг. 3, положение отображения значка может представлять собой местное положение, а начальной точкой указанной соединяющей линии может также являться центральная точка местного положения, как в качестве примера показано на фиг. 3. На практике, начальная точка указанной соединяющей линии может также представлять собой другую точку, например, точку угла раствора конуса, в положении отображения, чем настоящее изобретение не ограничивается.
Согласно настоящему изобретению предполагается, что на практике операции перетаскивания обычно не происходят навстречу друг к другу, поэтому способ оценки движения друг к другу должен обеспечивать механизм допущения конкретной погрешности. Как показано на фиг. 3, если первый угол находится в пределах первого предварительно заданного углового диапазона и второй угол находится в пределах второго предварительно заданного углового диапазона, то определяют, что первый сигнал сдвига и второй сигнал сдвига являются встречно движущимися сигналами сдвига. Первый и второй предварительно заданные угловые диапазоны могут быть заданы в соответствии с практическим условием, например, первый предварительно заданный угловой диапазон может составлять от +15 градусов до -15 градусов. Например, если первый угол составляет -11 градусов, то определяют, что первый угол находится в пределах первого предварительно заданного углового диапазона. Следует отметить, что на практике операцию перетаскивания можно выполнить посредством двух разных пальцев, таким образом, первый угол и второй угол, отличающиеся друг от друга, могут быть сгенерированы во время выполнения операции перетаскивания. Соответственно, первый предварительно заданный угловой диапазон и второй предварительно заданный угловой диапазон могут быть также заданы так, чтобы они были равны друг другу или отличались друг от друга. Конкретные числовые значения первого и второго предварительно заданных числовых диапазонов не ограничены в настоящем изобретении.
Следует отметить, что рассматриваемый вариант осуществления настоящего изобретения раскрыт для примера только с добавлением этапа оценки в соответствии с направлениями векторов сдвига. На практике же, для экономии ресурсов обработки, этап 204 может быть непосредственно выполнен без оценки направлений векторов сдвига. В настоящем изобретении не приведены конкретные ограничения.
Этап 204, на котором оценивают, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига. Если первый и второй сигналы сдвига удовлетворяют указанному предварительно заданному условию, то выполняют этап 205.
Для того чтобы избежать ошибочного распознавания случайной операции перетаскивания в качестве операции взаимного изменения положений значков, в рассматриваемом варианте осуществления настоящего изобретения оценивают длины векторов сдвига, при этом взаимное изменение положений значков выполняют только тогда, когда длины векторов сдвига удовлетворяют предварительно заданному условию.
В настоящем изобретении понятно, что если критерием оценки того, удовлетворяют ли сигналы сдвига предварительно заданному условию, является только то, превышают или нет длины векторов сдвига предварительно заданную длину, то с высокой вероятностью возможно возникновение следующих проблем: если предварительно заданная длина слишком велика, то пользователю неудобно выполнять операции перетаскивания, которые удовлетворяют предварительно заданному условию. Например, как показано на фиг. 4, когда предварительно заданная длина слишком велика, пользователь может не выполнить операцию перетаскивания, которая удовлетворит предварительно заданному условию, посредством двух пальцев одной и той же руки. Альтернативно, если предварительно заданная длина слишком мала, то случайная операция перетаскивания, вероятнее всего, будет распознана неправильно как операция для взаимного изменения положений двух значков. Основываясь на данном понимании, длины векторов сдвига и расстояние между значками, положения которых следует поменять, творчески объединяют для получения критерия оценки того, согласуются или нет сигналы сдвига с предварительно заданным условием согласно настоящему изобретению, в результате можно дополнительно избежать ошибочного распознавания случайной операции перетаскивания в качестве операции взаимного изменения положений значков с обеспечением удобства пользователя при выполнении операции. В рассматриваемом варианте осуществления настоящего изобретения, конкретный вариант способа оценки реализован следующим образом:
получают информацию о расстоянии между положением отображения интерфейса первого значка и положением отображения интерфейса второго значка, и, если числовое соотношение между указанным расстоянием, длиной первого вектора сдвига и длиной второго вектора сдвига удовлетворяет по меньшей мере одному предварительно заданному соотношению, то определяют, что первый сигнал сдвига и второй сигнал сдвига удовлетворяют предварительно заданному условию.
Указанное по меньшей мере одно предварительно заданное числовое соотношение включает в себя следующее:
числовое соотношение 1: отношение длины первого вектора сдвига к указанному расстоянию превышает первое предварительно заданное значение;
числовое соотношение 2: отношение длины второго вектора сдвига к указанному расстоянию превышает второе предварительно заданное значение; и
числовое соотношение 3: отношение суммы длины первого вектора сдвига и длины второго вектора сдвига к указанному расстоянию превышает третье предварительно заданное значение.
Указанное первое предварительно заданное значение, второе предварительно заданное значение и третье предварительно заданное значение могут быть заданы в зависимости от условий практического применения. Первое предварительно заданное значение и второе предварительно заданное значение могут быть заданы так, чтобы они были равны друг другу или отличались друг от друга. Третье предварительно заданное значение больше первого предварительно заданного значения и второго предварительно заданного значения.
Числовые соотношения 1 – 3 могут быть отдельно использованы в качестве критериев оценки того, согласуются или нет сигналы сдвига с предварительно заданным условием, и могут быть с легкостью объединены в критерий оценки того, согласуются или нет сигналы сдвига с предварительно заданным условием. Например, в сценарии, при котором числовые соотношения 1 – 3 все использованы в предварительно заданном условии, критерий оценки того, удовлетворяют ли сигналы сдвига предварительно заданному условию, имеет следующий вид: отношение длины первого вектора сдвига к указанному расстоянию превышает первое предварительно заданное значение; отношение длины второго вектора сдвига к указанному расстоянию превышает второе предварительно заданное значение и отношение суммы длины первого вектора сдвига и длины второго вектора сдвига к указанному расстоянию превышает третье предварительно заданное значение.
Следует отметить, что предварительно заданные числовые соотношения длин векторов сдвига и расстояния между значками, положения которых следует поменять, могут на практике также представлять собой иные соотношения. Например, сумма длин векторов сдвига превышает расстояние между значками, положения которых следует поменять. Другое предварительно заданное числовое соотношение не ограничивается в настоящем изобретении.
Этап 205, на котором, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют предварительно заданному условию, осуществляют взаимное изменение положений первого значка и второго значка.
Осуществление взаимного изменения положений первого значка и второго значка предусматривает: выдачу инструкции обновления отображения, содержащей информацию о взаимном изменении, причем указанная информация о взаимном изменении указывает на взаимное изменение информации о положении отображения первого значка и информации о положении отображения второго значка, причем указанная инструкция обновления отображения позволяет отображать на экране дисплея обновленный интерфейс отображения после взаимного изменения положений отображения. Следует отметить, что осуществление взаимного изменения положений первого значка и второго значка дополнительно предусматривает взаимное изменение информации о положении отображения первого значка и информации о положении отображения второго значка, хранящейся в памяти с тем, чтобы отображать первый значок и второй значок, положения которых были взаимно изменены, на экране дисплея после последующего запуска.
Согласно способу взаимного изменения положений значков, раскрытому в данном варианте осуществления настоящего изобретения, принимают первый сигнал сдвига и второй сигнал сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка; определяют первый вектор сдвига в соответствии с первым сигналом сдвига, а также определяют второй вектор сдвига в соответствии со вторым сигналом сдвига; оценивают, согласуются или нет первый сигнал сдвига и второй сигнал сдвига с предварительно заданным условием в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и, если первый сигнал сдвига и второй сигнал сдвига согласуются с указанным предварительно заданным условием, осуществляют взаимное изменение положений первого значка и второго значка. За счет внедрения подобного способа взаимного изменения положений значков, положения первого значка и второго значка меняются только тогда, когда первый сигнал сдвига и второй сигнал сдвига согласуются с предварительно заданным условием в процессе взаимного изменения положений значков, благодаря чему удается избежать ошибочного распознавания случайной операции перетаскивания в качестве операции взаимного изменения положений значков, при этом повышается точность распознавания намерения выполнить операцию взаимного изменения положений значков.
На фиг. 5 схематично показано устройство взаимного изменения положений значков в соответствии с одним из предпочтительных вариантов осуществления настоящего изобретения. Как показано на фиг. 5, указанное устройство содержит: приёмный модуль 501, определяющий модуль 502, оценочный модуль 503 и взаимозаменяющий модуль 504.
Указанный приёмный модуль 501 выполнен с возможностью приёма первого сигнала сдвига и второго сигнала сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка.
Указанный определяющий модуль 502 выполнен с возможностью определения первого вектора сдвига в соответствии с первым сигналом сдвига, а также определения второго вектора сдвига в соответствии со вторым сигналом сдвига.
Указанный оценочный модуль 503 выполнен с возможностью оценки того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига.
Указанный взаимозаменяющий модуль 504 выполнен с возможностью взаимного изменения положений первого значка и второго значка, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию.
В одном из предпочтительных вариантов осуществления настоящего изобретения указанный определяющий модуль 502 выполнен с возможностью:
определения исходного положения операции перетаскивания, связанной с первым сигналом сдвига, в качестве начальной точки первого вектора сдвига, и определения положения остановки операции перетаскивания, связанной с первым сигналом сдвига, в качестве конечной точки первого вектора сдвига, и
определения исходного положения операции перетаскивания, связанной со вторым сигналом сдвига, в качестве начальной точки первого вектора сдвига, и определения положения остановки операции перетаскивания, связанной со вторым сигналом сдвига, в качестве конечной точки первого вектора сдвига.
В другом предпочтительном варианте осуществления настоящего изобретения, указанный оценочный модуль 503 выполнен с возможностью:
получения информации о расстоянии между положением отображения первого значка и положением отображения второго значка, и
определения того, что первый сигнал сдвига и второй сигнал сдвига удовлетворяют предварительно заданному условию, если числовое соотношение между указанным расстоянием, длиной первого вектора сдвига и длиной второго вектора сдвига удовлетворяет по меньшей мере одному предварительно заданному числовому соотношению,
причем указанное по меньшей мере одно предварительно заданное числовое соотношение включает в себя следующее:
отношение длины первого вектора сдвига к указанному расстоянию превышает первое предварительно заданное значение;
отношение длины второго вектора сдвига к указанному расстоянию превышает второе предварительно заданное значение; и
отношение суммы длины первого вектора сдвига и длины второго вектора сдвига к указанному расстоянию превышает третье предварительно заданное значение.
В еще одном предпочтительном варианте осуществления настоящего изобретения указанный оценочный модуль 503 также выполнен с возможностью:
оценки того, являются ли первый сигнал сдвига и второй сигнал сдвига встречно движущимися сигналами сдвига в соответствии с направлением первого вектора сдвига и направлением второго вектора сдвига,
выполнения этапа оценки того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию, если первый вектор сдвига и второй вектор сдвига являются встречно движущимися сигналами сдвига, и
прекращения взаимного изменения положений значков, если первый сигнал сдвига и второй сигнал сдвига не являются встречно движущимися сигналами сдвига.
В другом предпочтительном варианте осуществления настоящего изобретения указанный оценочный модуль 503 выполнен с возможностью:
определения линии, соединяющей положение отображения интерфейса первого значка и положение отображения интерфейса второго значка, в качестве отсчётной линии;
получения информации об угле между направлением первого вектора сдвига и указанной отсчётной линией в качестве первого угла, и об угле между направлением второго вектора сдвига и указанной отсчётной линией в качестве второго угла; и
определения того, что первый сигнал сдвига и второй сигнал сдвига являются встречно движущимися сигналами сдвига, если первый угол находится в пределах первого предварительно заданного углового диапазона и второй угол находится в пределах второго предварительно заданного углового диапазона.
Согласно устройству взаимного изменения положений значков, раскрытому в данном варианте осуществления настоящего изобретения, предусмотрен приём первого сигнала сдвига и второго сигнала сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка; определение первого вектора сдвига в соответствии с первым сигналом сдвига, а также определение второго вектора сдвига в соответствии со вторым сигналом сдвига; оценка того, согласуются или нет первый сигнал сдвига и второй сигнал сдвига с предварительно заданным условием в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и, если первый сигнал сдвига и второй сигнал сдвига согласуются с указанным предварительно заданным условием, осуществление взаимного изменения положений первого значка и второго значка. За счет внедрения подобного устройства взаимного изменения положений значков, положения первого значка и второго значка можно менять только тогда, когда первый сигнал сдвига и второй сигнал сдвига согласуются с предварительно заданным условием в процессе взаимного изменения положений значков, благодаря чему удается избежать ошибочного распознавания случайной операции перетаскивания в качестве операции взаимного изменения положений значков, при этом повышается точность распознавания намерения выполнить операцию взаимного изменения положений значков.
На фиг. 6 схематично показано устройство 600 взаимного изменения положений значков в соответствии с еще одним предпочтительным вариантом осуществления настоящего изобретения. Например, указанное устройство 600 может представлять собой мобильный телефон, компьютер, цифровой терминал рассылки, устройство обмена сообщениями, игровую приставку, планшет, медицинское устройство, тренажерное оборудование, персональный цифровой помощник или другое подобное устройство.
Как показано на фиг. 6, указанное устройство 600 содержит один или несколько из следующих компонентов: обрабатывающий компонент 602, память 604, компонент 606 питания, мультимедийный компонент 608, аудио-компонент 610, интерфейс 612 ввода/вывода, сенсорный компонент 614 и коммуникационный компонент 616.
Указанный обрабатывающий компонент 602, как правило, обеспечивает управление всеми операциями устройства 600, например, операциями, связанными с отображением информации, телефонными звонками, передачей данных, функционированием видеокамеры и записывающими операциями. Обрабатывающий компонент 602 может содержать один или несколько процессоров 620 для исполнения инструкций и выполнения всех или некоторых из этапов раскрытых выше способов. Кроме того, обрабатывающий компонент 602 может содержать один или несколько модулей, обеспечивающих взаимодействие между обрабатывающим компонентом 602 и другими компонентами. Например, обрабатывающий компонент 602 может содержать мультимедийный модуль, обеспечивающий взаимодействие между указанным мультимедийным компонентом 608 и обрабатывающим компонентом 602.
Память 604 выполнена с возможностью хранения различных типов данных для поддержания функционирования указанного устройства 600. К указанным данным относятся, например, инструкции для любого приложения или способа, выполняемого в устройстве 600, контактная информация, телефонный справочник, сообщения, картинки, видео и т.д. Память 604 может быть реализована с использованием любого типа из энергозависимых или энергонезависимых запоминающих устройств, или их комбинации, например, статистической памяти с произвольной выборкой СППВ (SRAM), электрически стираемой программируемой постоянной памяти ЭСППП (EEPROM), стираемой программируемой постоянной памяти СППП (EPROM), программируемой постоянной памяти ППП (PROM), постоянной памяти ПП (ROM), магнитной памяти, флэш-памяти, магнитного или оптического диска.
Указанный компонент 606 питания обеспечивает подачу питания к различным компонентам устройства 600. При этом компонент 606 питания может содержать систему управления энергопотреблением, один или несколько источников питания и любые другие компоненты, связанные с генерированием, управлением и распределением электроэнергии в устройстве 600.
Указанный мультимедийный компонент 608 содержит экран, обеспечивающий выводной интерфейс между устройством 600 и пользователем. В некоторых вариантах осуществления настоящего изобретения указанный экран содержит жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если указанный экран содержит сенсорную панель, то экран может быть реализован в виде сенсорного экрана для приёма входных сигналов от пользователя. Сенсорная панель содержит один или несколько контактных датчиков для обнаружения прикосновений, скользящих движений пальца и жестов по сенсорной панели. Контактные датчики могут не только обнаруживать границы прикосновения или скользящего движения пальца, но также обнаруживать период времени или давление, связанные с прикосновением или скользящим движением пальца. В некоторых вариантах осуществления настоящего изобретения указанный мультимедийный компонент 608 содержит фронтальную камеру и/или заднюю камеру. Фронтальная камера и задняя камера могут принимать внешние мультимедийные данные, когда устройство 600 находится в рабочем режиме, например, режиме фотографирования или в режиме видеосъемки. Каждая из указанных камер, то есть фронтальная камера и задняя камера, может представлять собой фиксированную систему оптических линз или иметь возможность оптической фокусировки и изменения масштаба изображения.
Указанный аудио-компонент 610 выполнен с возможностью вывода и/или ввода аудио-сигналов. Например, аудио-компонент 610 содержит микрофон («MIC»), выполненный с возможностью приёма внешнего аудио-сигнала, когда устройство 600 находится в рабочем режиме, например, в режиме звонка, в режиме записи или в режиме распознавания голоса. Принятый аудио-файл может далее быть сохранен в памяти 604 или передан через коммуникационный компонент 616. В некоторых вариантах осуществления настоящего изобретения аудио-компонент 610 дополнительно содержит громкоговоритель для вывода аудио-сигналов.
Указанный интерфейс 612 ввода/вывода обеспечивает интерфейс между обрабатывающим компонентом 602 и периферическими интерфейсными модулями, причем указанные интерфейсные модули представляют собой, например, клавиатуру, сенсорное колесо с предусмотренными на нем кнопками, кнопки и другие подобные элементы. К указанным кнопкам относятся, помимо прочего, кнопка возврата в исходное положение, кнопка регулирования громкости, кнопка включения и кнопка блокировки.
Указанный сенсорный компонент 614 содержит один или несколько датчиков для обеспечения оценки состояния различных аспектов устройства 600. Например, сенсорный компонент 614 выполнен с возможностью обнаружения состояния включен/выключен устройства 600, относительного позиционирования компонентов, например, дисплея и клавиатуры устройства 600), изменения положения устройства 600 или компонентов устройства 600, наличия или отсутствия контакта пользователя с устройством 600, ориентации или ускорения/замедления устройства 600 и изменения температуры устройства 600. Указанный сенсорный компонент 614 может содержать датчик приближения, выполненный с возможностью обнаружения наличия объекта на близком расстоянии без какого-либо физического контакта. Сенсорный компонент 614 может также содержать светочувствительный датчик, например, датчик изображения на комплементарной структуре «металл-оксид-полупроводник» (КМОП-структуре) или датчик изображения на приборе с зарядовой связью (ПЗС), для использования в приложениях редактирования изображений. В некоторых вариантах осуществления настоящего изобретения сенсорный компонент 614 может также содержать датчик ускорения, гиродатчик, магнитный датчик давления или температурный датчик.
Указанный коммуникационный датчик 616 выполнен с возможностью обеспечения проводной или беспроводной передачи данных между устройством 600 и другими устройствами. Устройство 600 может получить доступ к беспроводной сети на основании стандартов связи, например, сети WiFi, 2G или 3G, или их комбинации. В одном из предпочтительных вариантов осуществления настоящего изобретения коммуникационный компонент 616 принимает сигнал оповещения или информацию, связанную с оповещением, от внешней системы управления оповещением через широковещательный канал. В одном из предпочтительных вариантов осуществления настоящего изобретения коммуникационный компонент 616 дополнительно содержит модуль беспроводной связи ближнего радиуса действия (NFC-модуль) для обеспечения связи малого покрытия. Например, указанный NFC-модуль может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии передачи данных в инфракрасном диапазоне (IrDA), сверхширокополостной (UWB) технологии, технологи Bluetooth (BT) и другой технологии.
В одном из предпочтительных вариантов осуществления настоящего изобретения устройство 600 может быть реализовано посредством одной или нескольких специализированных интегральных микросхем (ASIC), процессоров цифровой обработки сигналов (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, для выполнения способа взаимного изменения положений значков, проиллюстрированного на фиг. 1 или фиг. 2.
В одном из предпочтительных вариантов осуществления настоящего изобретения также предусмотрен энергонезависимый машиночитаемый носитель данных, содержащий инструкции, например, содержащиеся в памяти 604, причем указанные инструкции могут быть исполнены указанным процессором 620 устройства 600, для выполнения раскрытых выше способов. Например, указанный энергонезависимый машиночитаемый носитель данных может представлять собой постоянную память ПП (ROM), оперативную память ОП (RAM), постоянную память на компакт-диске ППКД (CD-ROM), устройство магнитного типа, дискету, оптическое запоминающее устройство или другое подобное устройство.
В одном из предпочтительных вариантов осуществления настоящего изобретения также предусмотрен энергонезависимый машиночитаемый носитель данных, причем, когда инструкции в носителе данных исполняются процессором в терминале, указанное устройство может выполнить способ взаимного изменения положений значков, проиллюстрированный на фиг. 1 или фиг. 2.
Другие предпочтительные варианты осуществления настоящего изобретения станут очевидными специалистам в данной области техники при изучении настоящего описания и при реализации на практике раскрытых в настоящем документе технических решений. Предполагается, что данная заявка охватывает любые вариации, варианты применения и модификации настоящего описания в соответствии с основными принципами настоящего изобретения и включает в себя такие отступления от настоящего описания, которые подпадают под известную или общепринятую практику в данной области техники. Предполагается, что описание и варианты, рассмотренные исключительно в качестве примерных, в истинном объеме изложены в прилагаемой формуле изобретения.
Следует понимать, что идея изобретения не ограничена конкретной конструкцией, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что в настоящее изобретение могут быть внесены различные модификации и изменения, не выходящие за пределы объема настоящего изобретения. Предполагается, что объем настоящего изобретения ограничен только прилагаемой формулой изобретения.
Промышленная применимость
В предложенном в настоящем изобретении способе взаимного изменения положений значков принимают первый сигнал сдвига и второй сигнал сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка; определяют первый вектор сдвига в соответствии с первым сигналом сдвига, а также определяют второй вектор сдвига в соответствии со вторым сигналом сдвига; оценивают, удовлетворяют или нет первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию, осуществляют взаимное изменение положений первого значка и второго значка, благодаря чему удается избежать ошибочного распознавания случайной операции перетаскивания в качестве операции взаимного изменения положений значков, при этом повышается точность распознавания намерения выполнить операцию взаимного изменения положений значков.
Изобретение относится к терминалам. Технический результат направлен на повышение надежности работы. Способ взаимного изменения положения значков содержит прием первого и второго сигналов сдвига, определение первого вектора в соответствии с первым сигналом сдвига и второго вектора в соответствии со вторым сигналом сдвига, оценку, удовлетворяют ли первый и второй сигналы сдвига указанному предварительно заданному условию, осуществление взаимного изменения. 3 н. и 8 з.п. ф-лы, 6 ил.
1. Способ взаимного изменения положений значков, содержащий следующие этапы:
принимают первый сигнал сдвига и второй сигнал сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка;
определяют первый вектор сдвига в соответствии с первым сигналом сдвига, а также определяют второй вектор сдвига в соответствии со вторым сигналом сдвига;
оценивают, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и
осуществляют взаимное изменение положений первого значка и второго значка, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию.
2. Способ по п. 1, отличающийся тем, что этап, на котором определяют первый вектор сдвига в соответствии с первым сигналом сдвига и определяют второй вектор сдвига в соответствии со вторым сигналом сдвига, предусматривает:
определение исходного положения операции перетаскивания, связанной с первым сигналом сдвига, в качестве начальной точки первого вектора сдвига и определение положения остановки операции перетаскивания, связанной с первым сигналом сдвига, в качестве конечной точки первого вектора сдвига, и
определение исходного положения операции перетаскивания, связанной со вторым сигналом сдвига, в качестве начальной точки первого вектора сдвига и определение положения остановки операции перетаскивания, связанной со вторым сигналом сдвига, в качестве конечной точки первого вектора сдвига.
3. Способ по п. 1, отличающийся тем, что этап, на котором оценивают, удовлетворяют или нет первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига, предусматривает:
получение информации о расстоянии между положением отображения первого значка и положением отображения второго значка и,
если числовое соотношение между указанным расстоянием, длиной первого вектора сдвига и длиной второго вектора сдвига удовлетворяет по меньшей мере одному предварительно заданному соотношению, определение того, что первый сигнал сдвига и второй сигнал сдвига удовлетворяют предварительно заданному условию,
причем указанное по меньшей мере одно предварительно заданное числовое соотношение включает в себя следующее:
отношение длины первого вектора сдвига к указанному расстоянию превышает первое предварительно заданное значение;
отношение длины второго вектора сдвига к указанному расстоянию превышает второе предварительно заданное значение и
отношение суммы длины первого вектора сдвига и длины второго вектора сдвига к указанному расстоянию превышает третье предварительно заданное значение.
4. Способ по п. 1, дополнительно предусматривающий то, что:
перед оценкой того, удовлетворяют или нет первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига,
оценивают, являются ли первый сигнал сдвига и второй сигнал сдвига встречно движущимися сигналами сдвига в соответствии с направлением первого вектора сдвига и направлением второго вектора сдвига,
если первый вектор сдвига и второй вектор сдвига являются встречно движущимися сигналами сдвига, выполняют этап оценки того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию,
а если первый сигнал сдвига и второй сигнал сдвига не являются встречно движущимися сигналами сдвига, прекращают процесс взаимного изменения положений значков.
5. Способ по п. 4, отличающийся тем, что этап, на котором оценивают, являются ли первый сигнал сдвига и второй сигнал сдвига встречно движущимися сигналами сдвига в соответствии с направлением первого вектора сдвига и направлением второго вектора сдвига, предусматривает:
определение линии, соединяющей положение отображения интерфейса первого значка и положение отображения интерфейса второго значка, в качестве отсчетной линии;
получение информации об угле между направлением первого вектора сдвига и указанной отсчетной линией в качестве первого угла и получение информации об угле между направлением второго вектора сдвига и указанной отсчетной линией в качестве второго угла и,
если первый угол находится в пределах первого предварительно заданного углового диапазона и второй угол находится в пределах второго предварительно заданного углового диапазона, определение того, что первый сигнал сдвига и второй сигнал сдвига являются встречно движущимися сигналами сдвига.
6. Устройство взаимного изменения положений значков, содержащее:
приемный модуль, выполненный с возможностью приема первого сигнала сдвига и второго сигнала сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка;
определяющий модуль, выполненный с возможностью определения первого вектора сдвига в соответствии с первым сигналом сдвига, а также определения второго вектора сдвига в соответствии со вторым сигналом сдвига;
оценочный модуль, выполненный с возможностью оценки того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и
взаимозаменяющий модуль, выполненный с возможностью взаимного изменения положений первого значка и второго значка, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию.
7. Устройство по п. 6, отличающееся тем, что указанный определяющий модуль выполнен с возможностью:
определения исходного положения операции перетаскивания, связанной с первым сигналом сдвига, в качестве начальной точки первого вектора сдвига и определения положения остановки операции перетаскивания, связанной с первым сигналом сдвига, в качестве конечной точки первого вектора сдвига, и
определения исходного положения операции перетаскивания, связанной со вторым сигналом сдвига, в качестве начальной точки первого вектора сдвига и определения положения остановки операции перетаскивания, связанной со вторым сигналом сдвига, в качестве конечной точки первого вектора сдвига.
8. Устройство по п. 6, отличающееся тем, что указанный оценочный модуль выполнен с возможностью:
получения информации о расстоянии между положением отображения первого значка и положением отображения второго значка и
определения того, что первый сигнал сдвига и второй сигнал сдвига удовлетворяют предварительно заданному условию, если числовое соотношение между указанным расстоянием, длиной первого вектора сдвига и длиной второго вектора сдвига удовлетворяет по меньшей мере одному предварительно заданному соотношению,
причем указанное по меньшей мере одно предварительно заданное числовое соотношение включает в себя следующее:
отношение длины первого вектора сдвига к указанному расстоянию превышает первое предварительно заданное значение;
отношение длины второго вектора сдвига к указанному расстоянию превышает второе предварительно заданное значение и
отношение суммы длины первого вектора сдвига и длины второго вектора сдвига к указанному расстоянию превышает третье предварительно заданное значение.
9. Устройство по п. 6, отличающееся тем, что указанный оценочный модуль также выполнен с возможностью:
оценки того, являются ли первый сигнал сдвига и второй сигнал сдвига встречно движущимися сигналами сдвига в соответствии с направлением первого вектора сдвига и направлением второго вектора сдвига,
выполнения этапа оценки того, удовлетворяют ли первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию, если первый вектор сдвига и второй вектор сдвига являются встречно движущимися сигналами сдвига, и
прекращения процесса взаимного изменения положений значков, если первый сигнал сдвига и второй сигнал сдвига не являются встречно движущимися сигналами сдвига.
10. Устройство по п. 9, отличающееся тем, что указанный оценочный модуль выполнен с возможностью:
определения линии, соединяющей положение отображения интерфейса первого значка и положение отображения интерфейса второго значка, в качестве отсчетной линии;
получения информации об угле между направлением первого вектора сдвига и указанной отсчетной линией в качестве первого угла,
получения информации об угле между направлением второго вектора сдвига и указанной отсчетной линией в качестве второго угла и
определения того, что первый сигнал сдвига и второй сигнал сдвига являются сигналами сдвига, движущимися друг к другу, если указанный первый угол находится в пределах первого предварительно заданного углового диапазона и указанный второй угол находится в пределах второго предварительно заданного углового диапазона.
11. Устройство взаимного изменения положений значков, содержащее:
процессор и
память, предназначенную для хранения инструкций, исполняемых указанным процессором,
причем указанный процессор выполнен с возможностью:
приема первого сигнала сдвига и второго сигнала сдвига, причем указанный первый сигнал сдвига инициирован операцией перетаскивания первого значка, а указанный второй сигнал сдвига инициирован операций перетаскивания второго значка;
определения первого вектора сдвига в соответствии с первым сигналом сдвига, а также определения второго вектора сдвига в соответствии со вторым сигналом сдвига;
оценки того, удовлетворяют или нет первый сигнал сдвига и второй сигнал сдвига предварительно заданному условию в соответствии с длиной первого вектора сдвига и длиной второго вектора сдвига; и
осуществления взаимного изменения положений первого значка и второго значка, если первый сигнал сдвига и второй сигнал сдвига удовлетворяют указанному предварительно заданному условию.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| МОБИЛЬНЫЙ ТЕРМИНАЛ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2536799C1 |

