Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления связью, способу управления связью и терминалу.
Уровень техники
К настоящему времени в практику внедрены системы радиосвязи, соответствующие стандарту LTE (Long Term Evolution (долговременная эволюция)), представляющим собой стандарт, разработанный Группой проекта партнерства третьего поколения (Third Generation Partnership Project (3GPP)). Более того, в качестве стандарта четвертого поколения для систем радиосвязи изучается стандарт LTE-Advanced (усовершенствованный LTE). В системах радиосвязи, соответствующих стандарту LTE или LTE-Advanced, могут быть использованы дуплексный режим с разделением по частоте (frequency-division duplex (FDD)) или дуплексный режим с разделением по времени (time-division duplex (TDD)).
В системах радиосвязи, соответствующих стандарту LTE, обычно используется дуплексный режим FDD. Дуплексный режим TDD имеет ряд преимуществ по сравнению с режимом FDD. Например, в режиме FDD, необходимо выделить пару из частотного диапазона восходящей линии и частотного диапазона нисходящей линии, тогда как в режиме TDD необходимо выделить единственный частотный диапазон. Кроме того, в режиме FDD соотношение между ресурсами связи восходящей линии и ресурсами связи нисходящей линии является фиксированным, тогда как в режиме TDD это соотношение между ресурсами связи восходящей линии и ресурсами связи нисходящей линии является переменным. В частности, в режиме TDD, соотношение между ресурсами связи восходящей линии и ресурсами связи нисходящей линии может быть изменено путем изменения конфигурации направлений связи в каждом субкадре в составе радио кадра. Вследствие таких преимуществ ожидается, что режим TDD будет все шире применяться в системах радиосвязи, соответствующих стандарту LTE или LTE-Advanced. Поэтому были предложены различные технологии, относящиеся к стандарту LTE TDD.
Например, в Патентной литературе 1 предложен способ сдвига границы между субкадром нисходящей линии и субкадром восходящей линии и осуществления связи с другим «домашним» узлом Home NodeB с использованием субкадра, расположенного между границами до и после сдвига, обеспечивая радиосвязь между узлами Home eNodeB.
Список литературы
Патентная литература
Патентная литература 1: JP 2012-1031 OA
Сущность изобретения
Техническая проблема
В режиме TDD соотношение между ресурсами связи восходящей линии и ресурсами связи нисходящей линии является переменным, вследствие чего для разных ячеек могут быть заданы различные конфигурации направлений связи с учетом интенсивности трафика в нисходящей линии или в восходящей линии. Однако когда для разных ячеек заданы различные конфигурации направлений связи, взаимосвязанные ячейки могут иметь различные направления связи в одном и том же субкадре, в результате чего между взаимосвязанными ячейками могут возникать помехи. Например, когда абонентский терминал (user equipment (UE)), принимающий сигнал нисходящей линии от узла eNodeB в своей ячейке, принимает также сигнал восходящей линии от терминала UE из ячейки, соседствующей со своей ячейкой, тогда этот сигнал восходящей линии может создавать взаимные помехи с сигналом нисходящей линии. Значительно труднее контролировать и бороться с помехами между ячейками, когда конфигурацию направлений связи задают динамически в зависимости от увеличения или уменьшения интенсивности трафика в восходящей линии или в нисходящей линии, чтобы еще больше увеличить пропускную способность системы.
Таким образом, желательно уменьшить помехи между взаимосвязанными ячейками и при этом повысить пропускную способность системы с использованием режима TDD.
Решение проблемы
Согласно настоящему изобретению предложено устройство управления связью, содержащее модуль радиосвязи, осуществляющий связь с одним или несколькими терминалами в ячейке по каналу связи, в котором направление связи можно задавать динамически для каждого субкадра, представляющего собой единицу времени в радиосвязи, и модуль управления, осуществляющий управление выделением ресурсов связи терминалу на основе направления связи, заданного в канале связи, и местонахождения терминала в ячейке.
Согласно настоящему изобретению предложен способ управления связью, содержащий осуществление связи с одним или несколькими терминалами в ячейке по каналу связи, в котором направление связи можно задавать динамически для каждого субкадра, представляющего собой единицу времени в радиосвязи, и управление выделением ресурсов связи терминалу на основе направления связи, заданного в канале связи, и местонахождения терминала в ячейке.
Согласно настоящему изобретению предложен терминал, содержащий модуль радиосвязи, осуществляющий связь с базовой станцией в своей ячейке по каналу связи, в котором направление связи можно задавать динамически для каждого субкадра, представляющего собой единицу времени в радиосвязи. Модуль радиосвязи осуществляет связь с базовой станцией в соответствии с ресурсами связи, выделенными самому терминалу базовой станцией на основе задания направления связи в канале связи и местонахождения самого терминала в ячейке.
Преимущества изобретения
Как описано выше, согласно настоящему изобретению, при использовании предлагаемых устройства управления связью, способа управления связью и терминала можно уменьшить помехи между взаимосвязанными ячейками в то же время повысить пропускную способность системы радиосвязи, применяющей дуплексный режим с разделением по времени (TDD).
Краткое описание чертежей
Фиг. 1 представляет диаграмму для описания примера формата радио кадра в режиме TDD.
Фиг. 2 представляет диаграмму для описания примера специального субкадра, входящего в состав радио кадра в режиме TDD.
Фиг. 3 представляет диаграмму для описания примера конфигурации направления связи в каждом субкадре, входящем в состав радио кадра в режиме TDD.
Фиг. 4 представляет схему для описания примера помех в субкадре, в котором направление связи различается между соседними ячейками.
Фиг. 5 представляет схему для описания первого примера помех в субкадре, в котором направление связи различается между макроячейкой и небольшой ячейкой.
Фиг. 6 представляет схему для описания второго примера помех в субкадре, в котором направление связи различается между макроячейкой и небольшой ячейкой.
Фиг. 7 представляет схему для общего описания первого варианта.
Фиг. 8 представляет блок-схему, показывающую пример конфигурации узла eNodeB согласно первому варианту.
Фиг. 9 представляет блок-схему, показывающую пример конфигурации терминала UE согласно первому варианту.
Фиг. 10 представляет логическую схему, показывающую пример процедуры управления связью согласно первому варианту.
Фиг. 11 представляет схему для общего описания изменений первого варианта.
Фиг. 12 представляет схему для описания операций узла eNodeB и терминала UE в небольшой ячейке.
Фиг. 13 представляет диаграмму для описания примера выбора субкадров, используемых для связи в небольшой ячейке.
Фиг. 14 представляет логическую схему, показывающую пример процедуры управления связью согласно изменениям первого варианта.
Фиг. 15 представляет схему для общего описания второго варианта.
Фиг. 16 представляет схему для общего описания второго варианта.
Фиг. 17 представляет блок-схему, показывающую пример конфигурации узла eNodeB согласно второму варианту.
Фиг. 18 представляет логическую схему, показывающую пример процедуры управления связью согласно второму варианту.
Фиг. 19 представляет схему для общего описания третьего варианта.
Фиг. 20 представляет блок-схему, показывающую пример конфигурации узла eNodeB согласно третьему варианту.
Фиг. 21 представляет логическую схему, показывающую пример процедуры управления связью согласно третьему варианту.
Фиг. 22 представляет схему для общего описания четвертого варианта.
Фиг. 23 представляет блок-схему, показывающую пример конфигурации узла eNodeB согласно четвертому варианту.
Фиг. 24 представляет логическую схему, показывающую пример процедуры управления связью согласно четвертому варианту.
Подробное описание изобретения
В дальнейшем предпочтительные варианты настоящего изобретения будут описаны подробно со ссылками на прилагаемые чертежи. Отметим, что в настоящем описании и на чертежах, элементам, имеющим по существу одинаковые функции и структуры, присвоены одни и те же позиционные обозначения, а повторяющееся описание опущено.
Отметим, что описание будет дано в следующем порядке.
1. Введение
1.1. Основная идея дуплексного режима с разделением по времени (TDD)
1.2. Техническая проблема в режиме TDD
2. Первый вариант
2.1. Общий обзор
2.2. Конфигурация узла eNodeB
2.3. Конфигурация терминала UE
2.4. Последовательность операций
2.5. Изменения
3. Второй вариант
3.1. Общий обзор
3.2. Конфигурация узла eNodeB
3.3. Последовательность операций
4. Третий вариант
4.1. Общий обзор
4.2. Конфигурация узла eNodeB
4.3. Последовательность операций
5. Четвертый вариант
5.1. Общий обзор
5.2. Конфигурация узла eNodeB
5.3. Последовательность операций
6. Резюме
1. Введение
Сначала будут рассмотрены основная идея дуплексного режима с разделением времени (TDD) и техническая проблема, связанная с этим режимом TDD. Хотя основная идея и техническая проблема, а также варианты настоящего изобретения будут рассмотрены здесь с использованием системы радиосвязи, соответствующей стандарту LTE или LTE-Advanced, в качестве примера, настоящее изобретение, безусловно, этим примером не ограничивается.
1.1. Основная идея дуплексного режима с разделением по времени (TDD)
Основная идея режима TDD будет описана со ссылками на фиг. 1-3.
(Режим TDD в системе LTE)
В системе LTE может быть использован любой из дуплексных режимов - режим FDD или режим TDD. В режиме FDD выделенный частотный диапазон для восходящей линии и выделенный частотный диапазон для нисходящей линии используются по оси частот. Кроме того, в режиме FDD используется формат, согласно которому радио кадр содержит 10 субкадров по оси времени. С другой стороны, в режиме TDD также используется формат, согласно которому радио кадр содержит 10 субкадров по оси времени. Однако в режиме TDD один и тот же частотный диапазон используется для связи в обеих - восходящей и нисходящей, линиях. Формат радио кадра в режиме TDD будет более подробно описан со ссылками на фиг. 1.
Фиг. 1 представляет диаграмму для описания примера формата радио кадра в режиме TDD. Как показано на фиг. 1, радио кадр представляет собой единицу времени в стандарте LTE, продолжительность которой равна 10 мс. Более того, один радио кадр содержит 10 субкадров. Субкадр также представляет собой единицу времени в стандарте LTE, продолжительность которой равна 1 мс. В режиме TDD направление связи задают для каждого субкадра. Например, в радио кадре, показанном на фиг. 1, в качестве направление связи в субкадре #0 задано нисходящее направление, а для субкадра #3 задано восходящее направление связи.
Здесь, термин «восходящая линия», «восходящее направление» ("uplink") обозначает связь (передач сигнала) от терминала UE к узлу eNodeB, а термин «нисходящая линия», «нисходящее направление» ("downlink") обозначает связь (передачу сигнала) от узла eNodeB к терминалу UE. На фиг. 1 буквы D, U и S обозначают субкадр нисходящей линии, субкадр восходящей линии и специальный субкадр, соответственно. Специальный субкадр будет рассмотрен ниже.
В системе радиосвязи, соответствующей стандарту LTE, обычно используется режим FDD. Однако режим TDD имеет ряд преимуществ перед режимом FDD.
Например, режим TDD имеет преимущество с точки зрения выделения частотного диапазона. В режиме FDD необходимо выделить пару из частотного диапазона восходящей линии и частотного диапазона нисходящей линии, тогда как в режиме TDD нужно выделить только один частотный диапазон.
Кроме того, режим TDD имеет преимущество с точки зрения соотношения восходящей линии и нисходящей линии. В качестве примера, в режиме FDD, когда ширина частотного диапазона восходящей линии равна 20 МГц и ширина частотного диапазона нисходящей линии равна 20 МГц, соотношение ресурсов связи восходящей линии и ресурсов связи нисходящей линии фиксировано на уровне «один к одному». С другой стороны, в режиме TDD, когда выделен частотный диапазон шириной 20 МГц, соотношение ресурсов связи восходящей линии и ресурсов связи нисходящей линии является переменным. В частности, в режиме TDD, изменяя конфигурацию направлений связи (далее именуемую «конфигурация режима TDD») в каждом субкадре в составе радио кадра, можно изменять соотношение ресурсов связи восходящей линии и ресурсов связи нисходящей линии.
Вследствие таких преимуществ можно ожидать, что режим TDD будет все более широко применяться в системах связи, соответствующих стандарту LTE или LTE-Advanced.
Хотя режим TDD имеет перечисленные выше преимущества, необходимо выделить период времени для переключения между нисходящей линией и восходящей линией. Поэтому в режиме TDD вставляют специальный субкадр между субкадром нисходящей линии и субкадром восходящей линии. Теперь этот специальный кадр будет рассмотрен более подробно со ссылками на фиг. 2.
Фиг. 2 представляет диаграмму для описания примера специального субкадра, входящего в состав радио кадра в режиме TDD. На фиг. 2 показаны субкадры #0-#2 из состава радио кадра, представленного на фиг. 1. Здесь субкадр #0 представляет собой субкадр нисходящей линии, субкадр #1 является специальным субкадром, а субкадр #2 представляет собой субкадр восходящей линии. Для узла eNodeB, промежуток времени, когда терминал UE принимает сигнал нисходящей линии в субкадре #0, имеет место позже промежутка времени, соответствующего субкадру #0 согласно рассматриваемому формату, вследствие задержки при прохождении сигнала в пространстве и задержки обработки сигнала в аппаратуре терминала UE. Кроме того, чтобы данные поступили в узел eNodeB в промежутке времени, соответствующем субкадру #2 согласно рассматриваемому формату, терминал UE должен передать сигнал восходящей линии с опережением. Поэтому специальный субкадр определен как область для выделения периода времени, соответствующего задержке в нисходящей линии, и периода времени, соответствующего опережению при передаче в восходящей линии. В частности, в состав специального субкадра входят пилотный временной интервал (слот) нисходящей линии (downlink pilot time slot (DwPTS)) и пилотный временной интервал (слот) восходящей линии (uplink pilot time slot (UpPTS)). Кроме того, специальный субкадр дополнительно содержит защитный период. Таким образом, недостатком режима TDD является наличие специального субкадра, вставляемого на время переключения между нисходящей линией и восходящей линией.
Конкретная конфигурация режима TDD
Режим LTE TDD (дуплексный режим с разделением по времени в системе LTE) определен в документе 3GPP Release 8. В разделе "TS 36. 211 Table 4. 2-2: Uplink-Downlink configurations (конфигурации восходящей - нисходящей линий)" показана конфигурация направления связи (т.е. конфигурация режима TDD) для каждого субкадра в составе радио кадра в режиме TDD. Конфигурация режима TDD теперь будет более конкретно рассмотрена со ссылками на фиг. 3.
Фиг. 3 представляет диаграмму для описания примера конфигурации направления связи в каждом субкадре, входящем в состав радио кадра в режиме TDD. Как показано на фиг. 3, в стандарте 3GPP определены семь конфигураций режима TDD, а именно конфигурации 0-6. Как описано выше, в системе LTE TDD радио кадр содержит десять субкадров, и направление связи задают для каждого субкадра. В субкадрах #0 и #5 из этих 10 субкадров передают синхросигнал от узла eNodeB, вследствие чего направление связи в этих субкадрах #0 и #5 зафиксировано неизменным, а именно связь в нисходящем направлении. Более того, субкадр #1 является специальным субкадром в любой конфигурации режима TDD. Кроме того, направление связи в субкадре #2 задано фиксированным, а именно связь в восходящем направлении. С другой стороны, субкадр #6 является либо специальным субкадром, либо субкадром нисходящей линии. В качестве направлений связи для каждого из субкадров #3, #4, #7, #8 и #9 индивидуально задают либо восходящее направление, либо восходящее направление.
Обычно предполагается, что каждый оператор выбирает и использует какую-либо одну из указанных семи конфигураций режима TDD. Поэтому, например, не предполагают, что каждый оператор может задавать различные конфигурации режима TDD для соседних ячеек.
1.2. Техническая проблема в режиме TDD
Далее техническая проблема в режиме TDD будет рассмотрена со ссылками на фиг. 4-6.
Пример специфичных помех
На пленарном заседании группы 3GPP, проходившем в Канзас-сити в марте 2011 г., было принято решение исследовать проблему помех путем задания различных конфигураций режима TDD для соседних ячеек. В результате общей тенденцией развития в системах LTE TDD было движение в сторону задания различных конфигураций режима TDD для взаимосвязанных ячеек (например, соседних ячеек). Специфичные помехи, возникающие, когда задают разные конфигурации режима TDD для взаимосвязанных ячеек (например, для соседних ячеек или для макроячейки и небольшой ячейки), будут теперь более конкретно рассмотрены со ссылками на фиг. 4-6.
Фиг. 4 представляет схему для описания примера помех в субкадре, в котором направление связи различается между соседними ячейками. На фиг. 4 показаны ячейка 10а и ячейка 10b, соседствующая с этой ячейкой 10а. Кроме того, в ячейке 10а имеются узел eNodeB 11a и терминал UE 21а. В ячейке 10b имеются узел eNodeB 11b и терминал UE 21b. Здесь предполагается, что в некотором субкадре направление связи является нисходящим в ячейке 10а, тогда как направление связи является восходящим в ячейке 10b. В этом случае, когда терминал UE 21а, который принимает сигнал 13 нисходящей линии от узла eNodeB 11a в ячейке 10а, принимает также сигнал 23 восходящей линии от терминала UE 2lb в ячейке 10b, этот сигнал 23 восходящей линии может создавать помехи сигналу 13 нисходящей линии. Кроме того, когда узел eNodeB 11b, принимающий сигнал 23 восходящей линии от терминала UE 21b в ячейке 10b, принимает также сигнал 13 нисходящей линии от узла eNodeB 11a в ячейке 10а, этот сигнал 13 нисходящей линии может создавать помехи сигналу 23 восходящей линии. В частности, сигналы, создающие взаимные помехи, обозначены на фиг. 4 пунктирными линиями.
Фиг. 5 представляет схему для описания первого примера помех в субкадре, в котором направление связи различается между макроячейкой и небольшой ячейкой. На фиг. 5 показаны макроячейка 30 и небольшая ячейка 40. Макроячейка 30 «покрывает» всю или часть небольшой ячейки 40. Кроме того, в макроячейке 30 находятся узел eNodeB 31 и терминал UE 21c. В небольшой ячейке 40 находятся узел eNodeB 41 и терминал UE 21d. Здесь предполагается, что в некотором субкадре в качестве направления связи заданы нисходящее направление в макроячейке 30 и восходящее направление в небольшой ячейке 40. В этом случае, когда терминал UE 21c, принимающий сигнал 33 нисходящей линии от узла eNodeB 31 в макроячейке 30, принимает также сигнал 25 восходящей линии от терминала UE 21d в небольшой ячейке 40b, указанный сигнал 25 восходящей линии может создавать помехи для сигнала 33 нисходящей линии. Кроме того, когда узел eNodeB 41, принимающий сигнал 25 восходящей линии от терминала UE 21d в небольшой ячейке 40, принимает также сигнал 33 нисходящей линии от узла eNodeB 31 в макроячейке 30, указанный сигнал 33 нисходящей линии может создавать помехи сигналу 25 восходящей линии. В частности, на фиг. 5 сигналы, создающие помехи один для другого, показаны пунктирной линией.
Фиг. 6 представляет схему для описания второго примера помех в субкадре, в котором направление связи различается между макроячейкой и небольшой ячейкой. На фиг. 6, аналогично фиг. 5, показаны макроячейка 30 и небольшая ячейка 40. Кроме того, показаны узел eNodeB 31, терминал UE 21c, узел eNodeB 41 и терминал UE 21d. Здесь предполагается, что в некотором субкадре в качестве направления связи заданы восходящее направление в макроячейке 30 и нисходящее направление в небольшой ячейке 40. В этом случае, когда терминал UE 21d, принимающий сигнал 43 нисходящей линии от узла eNodeB 41 в небольшой ячейке 40, принимает также сигнал 27 восходящей линии от терминала UE 21c в макроячейке 30, указанный сигнал 27 восходящей линии может создавать помехи сигналу 43 нисходящей линии. Кроме того, когда узел eNodeB 31, принимающий сигнал 27 восходящей линии от терминала UE 21c в макроячейке 30, принимает также сигнал 43 нисходящей линии от узла eNodeB 41 в небольшой ячейке 40, указанный сигнал 43 нисходящей линии может создавать помехи для сигнала 27 восходящей линии. В частности, на фиг. 6 сигналы, создающие помехи один для другого, тоже показаны пунктирной линией.
Отметим, что понятие небольшой ячейки 40 охватывает фемтоячейку, наноячейку, пикоячейку, микроячейку и т.п. Небольшая ячейка 40, представляющая собой вспомогательную ячейку, служащую для увеличения пропускной способности связи в макроячейке 30, может быть введена путем создания узла eNodeB меньшего размера, чем аналогичный узел в макроячейке.
Динамические изменения конфигурации режима TDD
Как описано выше, между взаимосвязанными ячейками могут возникать помехи, когда в этих взаимосвязанных ячейках заданы разные конфигурации режима TDD, а с другой стороны, желательно чтобы такую конфигурацию режима TDD можно было задавать динамически для каждой ячейки. Это обусловлено тем, что в случае выбора подходящей конфигурации режима TDD на основе интенсивности трафика в восходящей или в нисходящей линии в каждой ячейке можно ожидать увеличения пропускной способности связи в системе в целом. В частности, когда в ячейке возрастает интенсивность трафика в восходящей линии, следует, на основе такого увеличения интенсивности трафика, выбрать конфигурацию режима TDD, содержащую большее число субкадров восходящей линии. Кроме того, когда в ячейке возрастает интенсивность трафика в нисходящей линии, следует, на основе такого увеличения интенсивности трафика, выбрать конфигурацию режима TDD, содержащую большее число субкадров нисходящей линии. Характеристика интенсивности трафика изменяется от ячейки к ячейке, поэтому желательно, чтобы конфигурацию режима TDD можно было задавать динамически для каждой ячейки отдельно. Например, поскольку радио кадр имеет продолжительность 10 мс, конфигурацию режима TDD можно задавать через интервалы, протяженность которых составляет от 10 мс до нескольких десятков миллисекунд.
Техническая проблема
Как описано выше, между взаимосвязанными ячейками могут возникать помехи, когда в этих взаимосвязанных ячейках заданы разные конфигурации режима TDD, а с другой стороны, желательно чтобы такую конфигурацию режима TDD можно было задавать динамически для каждой ячейки с целью повышения пропускной способности связи в системе. Однако когда конфигурацию режима TDD динамически задают для каждой ячейки (например, через каждые несколько десятков миллисекунд), это значительно затрудняет контроль (подавление) помех между ячейками.
Поэтому в рассматриваемом варианте, в системе радиосвязи, использующей режим TDD, можно уменьшить помехи между взаимосвязанными ячейками (например, между соседними ячейками или между макроячейкой и небольшой ячейкой), улучшая при этом пропускную способность связи в системе в целом. В последующем описании будут приведены конкретные примеры в разделах <2. Первый вариант>, <3. Второй вариант>, <4. Третий вариант> и <5. Четвертый вариант>.
2. Первый вариант
2.1. Общий обзор
Сначала будет рассмотрен первый вариант настоящего изобретения. В этом первом варианте направление связи задают динамически в каждом субкадре в первом частотном диапазоне. Направление связи в каждом субкадре во втором частотном диапазоне задают таким образом, чтобы уменьшить разницу между направлениями связи в соседних ячейках, т.е. настолько большое число субкадров, насколько это возможно, должно иметь одинаковое направление связи. Кроме того, ресурсы связи из первого частотного диапазона не выделяют терминалу, находящемуся в периферийной части ячейки. Теперь этот первый вариант будет описан более конкретно со ссылками на фиг. 7.
Фиг. 7 представляет схему для общего описания первого варианта. На этом фиг. 7 показаны ячейка 10а и ячейка 10b, соседствующая с ячейкой 10а. В этом варианте ячейка 10 разделена на периферийную часть, находящуюся дальше от узла eNodeB 100-1, и центральную часть (т.е. центральную часть, расположенную ближе к узлу eNodeB 100-1), отличную от периферийной части. В центральной части ячейки 10 конфигурацию режима TDD задают динамически. С другой стороны, в периферийной части ячейки 10 задают такую же или аналогичную конфигурацию режима TDD, как в соседней ячейке. Здесь под конфигурацией режима TDD, аналогичной конфигурации в соседней ячейке, понимают конфигурацию режима TDD, в которой число субкадров, имеющих направление связи отличное от направления связи согласно конфигурации в соседней ячейке, невелико. Например, показанные на фиг. 3 конфигурация 3 и конфигурация 4 имеют одинаковые направления связи во всех субкадрах за исключением субкадра #4, и потому могут считаться аналогичными одна другой. Кроме того, например, в периферийной части ячейки 10 конфигурация режима TDD может быть задана статическим или квазистатическим образом.
В типовой системе LTE невозможно использовать разные конфигурации режима TDD в единственном частотном диапазоне (т.е. в полосе одной компонентной несущей (component carrier (CC)) шириной 20 МГц), и поэтому применяется технология агрегирования несущих. Агрегирование несущих представляет собой технологию агрегирования нескольких несущих СС, чтобы увеличить тем самым пропускную способность связи. Например, когда совокупность нескольких несущих CC содержит несущую CC 1 и несущую CC 2, несущая CC 1 используется в качестве ресурсов связи для терминала UE 200, расположенного в центральной части ячейки 10, а несущая СС 2 используется в качестве ресурсов связи для терминала UE 200, находящегося в периферийной части (и в центральной части) ячейки 10. Для несущей CC 1 конфигурацию режима TDD задают динамически на основе интенсивности трафика в ячейке. Для несущей СС 2, конфигурацию режима TDD задают (например, статическим или квазистатическим образом) равной или аналогичной такой конфигурации в соседней ячейке.
Благодаря такому заданию конфигурации режима TDD и выделению ресурсов связи, в частотном диапазоне, в котором направление связи задают динамически, ресурсы связи выделяют только терминалу UE 200, расположенному в центральной части ячейки 10. Поэтому, как это описано ниже можно уменьшить мощность передач, использующих эти ресурсы связи. В результате сигнал восходящей линии, передаваемый с использованием этих ресурсов связи, не создает существенных взаимных помех с сигналом нисходящей линии из соседней ячейки, и сигнал нисходящей линии, передаваемый с использованием этих ресурсов связи, не создает существенных взаимных помех с сигналом восходящей линии из соседней ячейки. В частности, в частотном диапазоне, в котором направление связи задают динамически, взаимные помехи, такие, как показано на фиг. 4, по существу не возникают. Отметим, что терминалу UE 200, расположенному в периферийной части ячейки 10, выделяют только ресурсы связи из частотного диапазона, в котором разница в направлениях связи относительно соседней ячейки мала. Поэтому в таком частотном диапазоне, безусловно, взаимные помехи, такие как показано на фиг. 4, по существу не возникают. Таким образом, в системе радиосвязи, использующей режим TDD, динамическое задание направления связи позволяет уменьшить помехи между соседними ячейками и при этом улучшить пропускную способность системы в целом.
Отметим, что узел eNodeB 100-1 выделяет небольшую мощность передачи (например, мощность 1) сигналу нисходящей линии на несущей CC 1 и выделяет большую мощность передачи (например, мощность 2) сигналу нисходящей линии на несущей CC 2. Кроме того, узел eNodeB 100-1 выделяет небольшую мощность передачи (например, мощность 1) сигналу восходящей линии на несущей СС 1 для терминала UE 200, который расположен в центральной части ячейки 10 и для которого ресурсы связи на несущей СС 1 выделены для восходящей линии. Также узел eNodeB 100-1 выделяет большую мощность передачи (например, мощность 2) сигналу восходящей линии на несущей СС 2 для терминала UE 200, который расположен в периферийной части ячейки 10 и для которого ресурсы связи на несущей СС 2 выделены для восходящей линии. Это обусловлено тем, что мощность передач может быть мала, когда расстояние между узлом eNodeB 100-1 и терминалом UE 200 невелико, и мощность передач необходимо сделать большой при большом расстоянии. Такое распределение мощностей делает затруднительным для сигнала нисходящей линии и сигнала восходящей линии на несущей СС 1, передаваемых для центральной части ячейки 10а, достижение центральной части соседней ячейки 10b. Поэтому, как описано выше, помехи, возникающие из-за динамического задания разных конфигураций режима TDD для разных ячеек, оказываются уменьшены.
2.2. Конфигурация узла eNodeB
Пример конфигурации узла eNodeB 100-1 для первого варианта будет рассмотрен со ссылками на фиг. 8. Эта фиг. 8 представляет блок-схему, показывающую пример конфигурации узла eNodeB 100-1 согласно первому варианту. Как показано на фиг. 8, узел eNodeB 100-1 содержит модуль ПО радиосвязи, модуль 120 для связи с сетью, запоминающее устройство 130 и процессорный модуль 140.
Модуль 110 радиосвязи
Модуль 110 радиосвязи осуществляет связь с одним или несколькими терминалами UE 200 в ячейке 10 по каналу связи, в котором направление связи может быть задано динамически для каждого субкадра, являющегося единицей времени для радиосвязи. Этот канал связи содержит, например, по меньшей мере первый частотный диапазон и второй частотный диапазон. Эти первый частотный диапазон и второй частотный диапазон представляют собой каждый компонентную несущую. В частности, модуль ПО радиосвязи осуществляет связь с терминалом UE 200 в ячейке 10 на несущих СС 1 и СС 2, для которых направление связи может быть задано динамически в каждом субкадре. Кроме того, модуль 110 радиосвязи передает сигнал нисходящей линии терминалу UE 200 в ячейке 10 и принимает сигнал восходящей линии от терминала UE 200 в ячейке 10 в соответствии с выделением ресурсов. Отметим, что модуль 110 радиосвязи содержит, например, антенну и высокочастотную схему.
Модуль 120 для связи с сетью
Модуль 120 для связи с сетью осуществляет связь с узлами связи и в том числе с другими узлами eNodeB. Например, интерфейс X2 между узлами eNodeB может быть реализован с использованием этого модуля 120 для связи с сетью. Такой модуль 120 для связи с сетью может содержать блок радиосвязи, который может быть использован им совместно с указанным модулем НО радиосвязи, или модуль проводной связи, такой как терминал локальной сети связи LAN, и т.п.
Запоминающее устройство 130
Запоминающее устройство 130 сохраняет программу и данные, необходимые для работы узла eNodeB 100-1. Это запоминающее устройство 130 содержит, например, носитель записи, такой как жесткий диск, полупроводниковое запоминающее устройство и т.п.
Процессорный модуль 140
Процессорный модуль 140 осуществляет разнообразные функции узла eNodeB 100-1. Например, процессорный модуль 140, который соответствует процессору, такому как центральный процессор (CPU (Central Processing Unit)), цифровой процессор сигнала (DSP (Digital Signal Processor)) и т.п., выполняет программу, хранящуюся в запоминающем устройстве 130 или на другом носителе записи, для выполнения разнообразных функций. Этот процессорный модуль 140 содержит модуль 141 определения местонахождения терминала, модуль 143 для измерения интенсивности трафика, модуль 145 для задания направления связи, модуль 147 управления ресурсами и модуль 149 управления мощностью.
Модуль 141 определения местонахождения терминала
Модуль 141 определения местонахождения терминала определяет местонахождение терминала UE 200 в ячейке 10. Это местонахождение может быть представлено, например, посредством расстояния между узлом eNodeB 100-1 и терминалом UE 200. Например, модуль 141 определения местонахождения терминала измеряет расстояние между узлом eNodeB 100-1 и терминалом UE 200 на основе величины опережения по времени для каждого терминала UE 200.
Модуль 143 для измерения интенсивности трафика
Модуль 143 для измерения интенсивности трафика измеряет интенсивность трафика в восходящей линии и интенсивность трафика в нисходящей линии в ячейке 10. Этот модуль 143 для измерения интенсивности трафика может измерять реальную величину интенсивности трафика в течение заданного периода времени или может измерять оценочную величину интенсивности трафика, прогнозируемую на заданный период времени, на основе запросов планирования от терминала UE 200 и т.п. Кроме того, модуль 143 для измерения интенсивности трафика может измерять интенсивность трафика в периферийной части ячейки 10 и интенсивность трафика в центральной части ячейки 10 по отдельности, либо измерять общую интенсивность трафика, не делая различий между этими интенсивностями.
Модуль 145 для задания направления связи
Модуль 145 для задания направления связи динамически задает направление связи для каждого субкадра в первом частотном диапазоне и задает направление связи для каждого субкадра во втором частотном диапазоне таким образом, чтобы уменьшить разницу в направлении связи между ячейкой 10 и ячейкой, взаимосвязанной с этой ячейкой 10. В таком варианте взаимосвязанная ячейка представляет собой ячейку, соседствующую с ячейкой 10. Например, модуль 145 для задания направления связи динамически задает конфигурацию режима TDD для несущей СС 1 на основе интенсивности трафика в восходящей или в нисходящей линии. В качестве примера, конфигурацию режима TDD для несущей СС 1 задают через интервалы от 10 мс до нескольких десятков миллисекунд. Кроме того, модуль 145 для задания направления связи задает конфигурацию режима TDD для несущей СС 2 такой же или аналогичной конфигурации режима TDD для несущей СС 2 в соседней ячейке. В качестве примера, модуль 145 для задания направления связи согласует с узлом eNodeB 100-1 соседней ячейки, через модуль 120 для связи с сетью, задание направления связи для несущей СС 2 на основе измеренной интенсивности трафика. Интерфейс между узлом eNodeB 100-1 ячейки 10 и узлом eNodeB 100-1 соседней ячейки представляет собой интерфейс X2.
Кроме того, модуль 145 для задания направления связи задает направление связи для каждого субкадра во втором частотном диапазоне статическим или квазистатическим образом. Например, модуль 145 для задания направления связи статическим или квазистатическим образом задает конфигурацию режима TDD для несущей СС 2. В качестве примера, модуль 145 для задания направления связи задает конфигурацию режима TDD на несущей СС 2 каждый раз, когда истекает очередной заданный промежуток времени. Этот заданный промежуток времени длиннее интервала задания направления связи для несущей СС 1. Задавая так конфигурацию статическим или квазистатическим способом, можно свести к минимуму объем связи и процедуры подстройки конфигурации режима TDD между узлами eNodeB.
Модуль 147 управления ресурсами
Модуль 147 управления ресурсами осуществляет управление выделением ресурсов связи терминалу UE 200 на основе задания направления связи в канале связи, в котором направление связи может быть задано динамически для каждого субкадра, и местонахождения терминала UE 200 в ячейке 10. В частности, в этом варианте модуль 147 управления ресурсами не выделяет ресурсы связи в первом частотном диапазоне терминалу UE 200, расположенному в периферийной части ячейки 10. Например, модуль 147 управления ресурсами не выделяет ресурсы связи на несущей СС 1 терминалу UE 200, расположенному в периферийной части ячейки 10, и выделяет ресурсы связи на несущей СС 1 терминалу UE 200, который расположен не в периферийной части ячейки 10 (т.е. терминалу UE 200, находящемуся в центральной части ячейки 10). Кроме того, например, модуль 147 управления ресурсами выделяет ресурсы связи на несущей СС 2 терминалу UE 200, расположенному в периферийной части ячейки 10 (и в центральной части ячейки 10).
Модуль 149 управления мощностью
Модуль 149 управления мощностью осуществляет управление мощностью передач сигналов в ячейке 10. Например, модуль 149 управления мощностью осуществляет управление мощностью передач модуля 110 радиосвязи. Например, модуль 149 управления мощностью выделяет небольшую мощность передач для нисходящей линии в первом частотном диапазоне (например, на несущей CC 1) и большую мощность передач для нисходящей линии (например, на несущей CC 2).
Кроме того, например, узел eNodeB 100-1 выделяет небольшую мощность передач в восходящей линии в первом частотном диапазоне для терминала UE 200, который расположен в центральной части ячейки 10 и для которого в первом частотном диапазоне (например, на несущей CC 1) выделены ресурсы связи для восходящей линии. Кроме того, узел eNodeB 100-1 выделяет большую мощность передач в восходящей линии во втором частотном диапазоне для терминала UE 200, который расположен в периферийной части ячейки 10 и для которого во втором частотном диапазоне (например, на несущей CC 2) выделены ресурсы связи для восходящей линии.
2.3. Конфигурация терминала UE
Пример конфигурации терминала UE 200 согласно первому варианту будет рассмотрен со ссылками на фиг. 9. Эта фиг. 9 представляет блок-схему, показывающую пример конфигурации терминала UE 200 согласно первому варианту. Как показано на фиг. 9, терминал UE 200 содержит модуль 210 радиосвязи, запоминающее устройство 220 и процессорный модуль 230.
Модуль 210 радиосвязи
Модуль 210 радиосвязи осуществляет связь с узлом eNodeB 100-1 в ячейке 10 по каналу связи, в котором направление связи может быть задано динамически для каждого субкадра, представляющего собой единицу времени радиосвязи. Кроме того, модуль 210 радиосвязи осуществляет связь с узлом eNodeB 100-1 в соответствии с выделением ресурсов связи для самого модуля 210 радиосвязи, выполняемого узлом eNodeB 100-1 на основе задания направления связи в канале связи и местонахождения самого этого модуля 210 радиосвязи в ячейке 10.
Например, канал связи содержит по меньшей мере первый частотный диапазон и второй частотный диапазон. Каждый из этих диапазонов - и первый частотный диапазон, и второй частотный диапазон, представляет собой компонентную несущую. В частности, модуль 210 радиосвязи осуществляет связь с узлом eNodeB 100-1 в ячейке 10 на несущей СС 1 и несущей СС 2, на которых направление связи может быть задано динамически для каждого субкадра. Кроме того, узел eNodeB 100-1 выделяет ресурсы связи терминалу UE 200 на основе задания конфигурации режима TDD для несущих СС 1 и СС 2 и местонахождения терминала UE 200 в ячейке 10, после чего модуль 210 радиосвязи осуществляет связь в соответствии с выделением ему ресурсов связи. Отметим, что указанный модуль 210 радиосвязи содержит, например, антенну и высокочастотную схему.
Запоминающее устройство 220
Запоминающее устройство 220 сохраняет программу и данные, необходимые для работы терминала UE 200. Это запоминающее устройство 220 содержит, например, носитель записи, такой как жесткий диск, полупроводниковое запоминающее устройство и т.п.
Процессорный модуль 230
Процессорный модуль 230 осуществляет разнообразные функции терминала UE 200. Например, процессорный модуль 230, который соответствует процессору, такому как центральный процессор (CPU (Central Processing Unit)), цифровой процессор сигнала (DSP (Digital Signal Processor)) и т.п., выполняет программу, хранящуюся в запоминающем устройстве 220 или на другом носителе записи, для выполнения разнообразных функций. В качестве примера, процессорный модуль 230 управляет связью, осуществляемой модулем 210 радиосвязи.
Например, процессорный модуль 230 получает системную информацию из сигнала нисходящей линии, принимаемого модулем 210 радиосвязи. Кроме того, процессорный модуль 230 распознают конфигурацию режима TDD, которая была задана, на основе этой системной информации. Например, системную информацию относительно каждой несущей СС получают из сигнала нисходящей линии на этой несущей СС, а конфигурацию режима TDD для каждой несущей СС распознают на основе системной информации относительно этой несущей CC. После этого процессорный модуль 230 дает команду модулю 210 радиосвязи осуществлять связь на основе распознанных конфигураций режима TDD.
Кроме того, например, процессорный модуль 230 получает информацию планирования для восходящей линии и нисходящей линии из сигнала нисходящей линии, принимаемого модулем 210 радиосвязи. Помимо того, процессорный модуль 230 распознает выделение ресурсов связи терминалу UE 200 на основе полученной информации планирования. После этого процессорный модуль 230 дает команду модулю 210 радиосвязи осуществить связь в соответствии с выделением ресурсов связи.
2.4. Последовательность операций
Далее пример процедуры управления связью согласно первому варианту будет рассмотрен со ссылками на фиг. 10. Эта фиг. 10 представляет логическую схему, показывающую пример процедуры управления связью согласно первому варианту. Отметим, что эту процедуру управления связью выполняют в узле eNodeB 100-1.
Сначала, на этапе S501, модуль 141 определения местонахождения терминала определяет местонахождение терминала UE 200 в ячейке 10. На этапе S503, модуль 143 для измерения интенсивности трафика измеряет интенсивность трафика в восходящей линии и интенсивность трафика в нисходящей линии в ячейке 10. После этого, на этапе S505, модуль 145 для задания направления связи задает направление связи (например, конфигурацию режима TDD) на несущей CC 1 на основе измеренных интенсивностей трафика.
На этапе S507 модуль 145 для задания направления связи определяет, прошел ли уже заданный период времени. Если заданный период времени прошел, процедура управления переходит к этапу S509. В противном случае процедура управления переходит к этапу S513.
На этапе S509, модуль 145 для задания направления связи согласует с узлом eNodeB 100-1 соседней ячейки, посредством модуля 120 для связи с сетью, задание направления связи для несущей СС 2 на основе измеренных интенсивностей трафика. После этого, на этапе S511, модуль 145 для задания направления связи задает направление связи (т.е., конфигурацию режима TDD) для несущей СС 2 на основе результатов согласования с узлом eNodeB 100-1 соседней ячейки.
На этапе S513 модуль 147 управления ресурсами выделяет ресурсы связи на несущей СС 2 терминалу UE 200, расположенному в периферийной части ячейки 10 (и в центральной части ячейки 10). На этапе S515 модуль 147 управления ресурсами выделяет ресурсы связи на несущей СС 1 терминалу UE 200, который располагается не в периферийной части ячейки 10 (т.е. терминалу UE 200, расположенному в центральной части ячейки 10).
На этапе S517 модуль 110 радиосвязи осуществляет связь с терминалом UE 200 с использованием выделенных ресурсов связи. 2. 5. Изменения (1) Общий обзор
Далее будет рассмотрено одно из изменений первого варианта. Согласно этому изменению ячейка 10 представляет собой макроячейку, закрывающую всю или часть небольшой ячейки. Узел eNodeB 100-1 дает команду узлу связи (например, узлу eNodeB) небольшой ячейки задать направление связи для каждого субкадра в небольшой ячейке таким образом, чтобы уменьшить разницу в направлениях связи между ячейкой 10 и небольшой ячейкой. Такое изменение первого варианта будет теперь более подробно рассмотрено со ссылками на фиг. 11.
Эта фиг. 11 представляет схему для общего описания изменений первого варианта. На фиг. 11 показаны ячейка 10, представляющая собой макроячейку, и две небольшие ячейки 40. Ячейка 10 аналогична той ячейке, которая была описана со ссылками на фиг. 7. В частности, в этой ячейке 10 несущую СС 1 используют в качестве ресурсов связи для терминала UE 200, расположенного в периферийной части ячейки 10, а несущую СС 2 используют в качестве ресурсов связи для терминала UE 200, расположенного в периферийной части (и в центральной части) ячейки 10. Небольшая ячейка 40а находится в периферийной части ячейки 10, а небольшая ячейка 40b находится в центральной части ячейки 10.
В таком случае, например, узел eNodeB 100-1 дает команду узлу eNodeB 41а задать конфигурацию режима TDD для несущей CC 2 в небольшой ячейке 40а, такую же или аналогичную конфигурации режима TDD для несущей CC 2 в ячейке 10. Кроме того, узел eNodeB 100-1 дает команду узлу eNodeB 41b задать конфигурацию режима TDD для несущей CC 1 в небольшой ячейке 40b, такую же или аналогичную конфигурации режима TDD для несущей СС 1 в ячейке 10.
Благодаря такому заданию конфигурации режима TDD, направление связи в ячейке 10, представляющей собой макроячейку, совпадает с направлением связи в небольшой ячейке 40 в большинстве субкадров. Поэтому помехи, описанные применительно к фиг. 5 и 6, можно уменьшить.
Изменения небольшой ячейки
Отметим, что аналогично ячейке 10 небольшая ячейка 40 может быть разбита на периферийную часть, расположенную дальше от узла eNodeB 41, и центральную часть (т.е. центральная часть располагается ближе к узлу eNodeB 41), отличную от периферийной части. Теперь это будет рассмотрено более подробно со ссылками на фиг. 12.
Эта фиг. 12 представляет схему для описания операций узла eNodeB 41 и терминала UE 200 в небольшой ячейке 40. На фиг. 12 показаны также небольшие ячейки 40а и 40b, изображенные на фиг. 11. В таком случае, узел eNodeB 41а небольшой ячейки 40а динамически задает направление связи для каждого субкадра несущей CC, отличной от несущей СС 2, и не выделяет ресурсы связи в другом частотном диапазоне терминалу UE 200e, расположенному в периферийной части небольшой ячейки 40а. Узел eNodeB 41а выделяет ресурсы связи в другом частотном диапазоне терминалу UE 200f, расположенному в центральной части небольшой ячейки 40а. Кроме того, узел eNodeB 41b небольшой ячейки 40b динамически задает направление связи для каждого субкадра на несущей СС, отличной от несущей СС 1, и не выделяет ресурсов связи в другом частотном диапазоне терминалу UE 200g, расположенному в периферийной части небольшой ячейки 40b. Узел eNodeB 41b выделяет ресурсы связи в другом частотном диапазоне терминалу UE 200h, расположенному в центральной части небольшой ячейки 40b.
При таком выделении ресурсов, ресурсы связи в частотном диапазоне, в котором направление связи задают динамически, (т.е. в указанном другом частотном диапазоне) выделяют только терминалу UE 200, расположенному в центральной части небольшой ячейки 40. Поэтому в небольшой ячейке можно уменьшить мощность передач с использованием указанных ресурсов связи. В результате, сигнал восходящей линии, передаваемый с использованием ресурсов связи небольшой ячейки, не создает существенных помех для сигнала нисходящей линии ячейки 10, а сигнал нисходящей линии, передаваемый с использованием ресурсов связи небольшой ячейки, не создает существенных помех для сигнала восходящей линии макроячейки. В частности, в частотном диапазоне, для которого направление связи задают динамически, по существу не возникают взаимные помехи между небольшой ячейкой и макроячейкой, такие как показаны на фиг. 5 и 6
Более того, расстояние между терминалом UE 200, расположенным в центральной части небольшой ячейки 40, и узлом eNodeB 41 меньше расстояния между узлом eNodeB 100-1 и узлом eNodeB 41, вследствие чего сигнал нисходящей линии ячейки 10 не создает существенных взаимных помех с сигналом восходящей линии небольшой ячейки 40. Кроме того, расстояние между терминалом UE 200, расположенным в центральной части небольшой ячейки 40, и узлом eNodeB 41 меньше расстояния между терминалом UE 200 и другим терминалом UE 200, осуществляющим связь с узлом eNodeB 100-1, вследствие чего сигнал восходящей линии ячейки 10 не создает существенных взаимных помех с сигналом нисходящей линии небольшой ячейки 40. В частности, в частотном диапазоне, в котором направление связи задают динамически, взаимные помехи между небольшой ячейкой и макроячейкой, такие как показаны на фиг. 5 и 6, по существу не возникают.
Отметим, что в небольшой ячейке 40 терминалу UE 200, расположенному в периферийной части этой небольшой ячейки 40, выделяют только ресурсы связи частотного диапазона (несущей СС 1 или несущей СС 2), для которого разница в направлении связи относительно ячейки 10 невелика. Поэтому, в указанном частотном диапазоне взаимные помехи, такие как показаны на фиг. 5 и 6, по существу не возникают.
Таким образом, в системе радиосвязи, использующей режим TDD, посредством динамического задания направления связи можно уменьшить взаимные помехи между макроячейкой и небольшой ячейкой, улучшив в то же время пропускную способность связи в системе.
(2) Конфигурация узла eNodeB
В таком изменении, модуль 145 для задания направления связи и модуль 149 управления мощностью узла eNodeB 100-1, которые были описаны выше со ссылками на фиг. 8, работают, как рассмотрено ниже. Отметим, что, как описано выше, согласно такому изменению ячейка 10, представляющая собой макроячейку, закрывает всю или часть небольшой ячейки 40.
Модуль 145 для задания направления связи
Модуль 145 для задания направления связи дает команду узлу eNodeB 41 в небольшой ячейке 40 задать направление связи для каждого субкадра в этой небольшой ячейке 40 таким образом, чтобы уменьшить разницу в направлениях связи между ячейкой 10 и небольшой ячейкой 40. В частности, модуль 145 для задания направления связи дает команду узлу eNodeB 41 задать конфигурацию режима TDD в небольшой ячейке 40, такую же или аналогичную конфигурации режима TDD в ячейке 10.
Например, модуль 145 для задания направления связи, когда небольшая ячейка 40 расположена в периферийной части ячейки 10, дает команду узлу eNodeB 41 задать направление связи во втором частотном диапазоне в небольшой ячейке 40 таким образом, чтобы уменьшить разницу в направлениях связи между ячейкой 10 и небольшой ячейкой 40. В частности, модуль 145 для задания направления связи дает команду узлу eNodeB 41а задать конфигурацию режима TDD для несущей CC 2 в небольшой ячейке 40а, такую же или аналогичную конфигурации режима TDD для несущей CC 2 ячейки 10. В таком случае, например, аналогично конфигурации режима TDD для несущей СС 2 в ячейке 10, конфигурацию режима TDD для несущей CC 2 в небольшой ячейке 40а задают статическим или квазистатическим образом.
Кроме того, например, модуль 145 для задания направления связи, когда небольшая ячейка 40 не располагается в периферийной части ячейки 10, дает команду узлу eNodeB 41 задать направление связи в первом частотном диапазоне в небольшой ячейке 40 таким образом, чтобы уменьшить разницу в направлениях связи между ячейкой 10 и небольшой ячейкой 40. В частности, модуль 145 для задания направления связи дает команду узлу eNodeB 41b задать конфигурацию режима TDD для несущей СС 1 в небольшой ячейке 40b, такую же или аналогичную конфигурации режима TDD для несущей СС 1 в ячейке 10. В таком случае, например, аналогично конфигурации режима TDD для несущей СС 1 в ячейке 10, конфигурацию режима TDD для несущей СС 1 в небольшой ячейке 40b задают динамически.
В качестве конкретного способа управления узлом eNodeB 41 модуль 145 для задания направления связи сообщает узлу eNodeB 41 направление связи для каждого субкадра в первом частотном диапазоне или направление связи для каждого субкадра во втором частотном диапазоне, которые были заданы посредством модуля 145 для задания направления связи. В результате, модуль 145 для задания направления связи дает команду узлу eNodeB 41 задать направление связи для каждого субкадра в небольшой ячейке 40. Этот модуль 145 для задания направления связи передает узлу eNodeB 41 указанное сообщение направлений через, например, модуль 120 для связи с сетью.
Отметим, что, как описано выше со ссылками на фиг. 12, узел eNodeB 41, когда небольшая ячейка 40 располагается в периферийной части ячейки 10, может динамически задавать направление связи для каждого субкадра в частотном диапазоне, отличном от второго частотного диапазона, и может не выделять ресурсы связи в этом другом, отличном от второго частотном диапазоне терминалу UE 200, который не располагается в периферийной части небольшой ячейки 40. В частности, узел eNodeB 41 может динамически задавать конфигурацию режима TDD для несущей СС, отличной от несущей СС 2, и может не выделять ресурсы связи этой другой, отличной от СС 2 несущей СС терминалу UE 200е, расположенному в периферийной части небольшой ячейки 40а.
Аналогично, как описано выше со ссылками на фиг. 12, узел eNodeB 41, когда небольшая ячейка 40 не располагается в периферийной части ячейки 10, может динамически задавать направление связи в каждом субкадре для частотного диапазона, отличного от первого частотного диапазона, и может не выделять ресурсы связи этого другого, отличного от первого частотного диапазона терминалу, расположенному в периферийной части небольшой ячейки 40. В частности, узел eNodeB 41 может динамически задавать конфигурацию режима TDD для несущей СС, отличной от несущей СС 1, и может не выделять ресурсы связи этой другой, отличной от СС 2 несущей СС терминалу UE 200g, расположенному в периферийной части небольшой ячейки 40b.
Модуль 149 управления мощностью
Модуль 149 управления мощностью может уменьшить мощность передач в ячейке 10 для субкадра, в котором направление связи в ячейке 10 отличается от направления связи в небольшой ячейке 40. Например, модуль 149 управления мощностью уменьшает мощность передач на несущей СС 2 в ячейке 10 для субкадра, в котором направление связи на несущей СС 2 в ячейке 10 отличается от направления связи на несущей CC 2 в небольшой ячейке 40а. Кроме того, например, модуль 149 управления мощностью уменьшает мощность передач на несущей СС 1 в ячейке 10 для субкадра, в котором направление связи на несущей СС 1 в ячейке 10 отличается от направления связи на несущей СС 1 в небольшой ячейке 40b. В таком случае, например, модуль 149 управления мощностью получает сообщение о направлении связи (т.е. конфигурации режима TDD) в небольшой ячейке 40 от узла eNodeB 41 через модуль 120 для связи с сетью.
Посредством такого уменьшения мощности передач можно уменьшить взаимные помехи между сигналом нисходящей линии ячейки 10 и сигналом восходящей линии небольшой ячейки 40, а также взаимные помехи между сигналом восходящей линии ячейки 10 и сигналом нисходящей линии небольшой ячейки 40.
Прочее
Отметим, что если число субкадров, которые могут быть использованы для связи в небольшой ячейке 40, ограничено, субкадры с целью использования для связи можно выбирать на основе интенсивности трафика в нисходящей линии или восходящей линии в небольшой ячейке 40. В частности соотношение между субкадрами восходящей линии и субкадрами нисходящей линии в составе радио кадра можно изменять в зависимости от интенсивности трафика в нисходящей или в восходящей линии. Далее это будет описано конкретно со ссылками на фиг. 13.
Эта фиг. 13 представляет диаграмму для описания примера выбора субкадров, используемых для связи в небольшой ячейке. В этом примере на фиг. 13 для несущей СС 1, используемой в качестве ресурсов связи для терминала UE 200, расположенного в центральной части ячейки 10, задают конфигурацию режима TDD, соответствующую конфигурации 1, представленной на фиг. 3. Кроме того, для несущей СС 2, используемой в качестве ресурсов связи для терминала UE 200, расположенного в периферийной части ячейки 10, задают конфигурацию режима TDD, соответствующую конфигурации 3, представленной на фиг. 3.
В небольшой ячейке 40а, расположенной в периферийной части ячейки 10, интенсивность трафика в нисходящей линии выше интенсивности трафика в восходящей линии, вследствие чего большее число субкадров нисходящей линии выбирают в качестве субкадров для использования в процессе связи. С другой стороны, в небольшой ячейке 40 с, расположенной в периферийной части ячейки 10, интенсивность трафика в восходящей линии выше интенсивности трафика в нисходящей линии, вследствие чего большее число субкадров восходящей линии выбирают в качестве субкадров для использования в процессе связи.
Аналогично, в небольшой ячейке 40b, расположенной в центральной части ячейки 10, интенсивность трафика в нисходящей линии выше интенсивности трафика в восходящей линии, вследствие чего большее число субкадров нисходящей линии выбирают в качестве субкадров для использования в процессе связи. С другой стороны, в небольшой ячейке 40d, расположенной в центральной части ячейки 10, интенсивность трафика в восходящей линии выше интенсивности трафика в нисходящей линии, вследствие чего большее число субкадров восходящей линии выбирают в качестве субкадров для использования в процессе связи.
(3) Последовательность операций
Далее, пример процедуры управления связью в соответствии с изменением первого варианта будет рассмотрен со ссылками на фиг. 14. Эта фиг. 14 представляет логическую схему, показывающую пример процедуры управления связью согласно изменениям первого варианта. Эта процедура осуществления связи выполняется в узле eNodeB 100-1. Здесь будет рассмотрен только этап S521, который представляет собой отличие примера процедуры управления связью согласно первому варианту, описанного со ссылками на фиг. 10, и примером процедуры управления связью согласно изменению этого варианта.
На этапе S521 модуль 145 для задания направления связи сообщает узлу eNodeB 41 о направлении связи для каждого субкадра на несущей СС 1 или о направлении связи для каждого субкадра на несущей СС 2, которое было заданы модулем 145 для задания направления связи. В результате, модуль 145 для задания направления связи дает команду узлу eNodeB 41 задать направление связи для каждого субкадра в небольшой ячейке 40. Этот модуль 145 для задания направления связи передает сообщения узлу eNodeB 41 через, например, модуль 120 для связи с сетью.
3. Второй вариант
3.1. Общий обзор
Первый вариант был конкретно описан со ссылками на операции узла eNodeB в ячейке, соседствующей с другой ячейкой. Более того, изменение первого варианта было конкретно описано со ссылками на операции узла eNodeB в макроячейке, в случае, когда ячейка, соседствующая с другой ячейкой, является макроячейкой. Далее второй вариант настоящего изобретения будет рассмотрен со ссылками на операции узла eNodeB в небольшой ячейке, занимающей всю или часть макроячейки. Во втором варианте, в небольшой ячейке динамически задают направление связи для каждого субкадра в первом частотном диапазоне и затем задают направление связи для каждого субкадра во втором частотном диапазоне таким образом, чтобы уменьшить разницу в направления связи между небольшой ячейкой и макроячейкой, т.е. чтобы настолько большое число субкадров, насколько это возможно, имели одно и то же направление связи. При этом ресурсы связи в первом частотном диапазоне не выделяют терминалу, расположенному в периферийной части небольшой ячейки. Второй вариант будет далее более конкретно рассмотрен со ссылками на фиг. 15 и 16.
Фиг. 15 и 16 представляют схемы для общего описания второго варианта. На фиг. 15 показаны макроячейка 30 и ячейка 10, представляющая собой небольшую ячейку. Узел eNodeB 100-2 в этом варианте представляет собой узел eNodeB небольшой ячейки. На фиг. 16 ячейка 10, являющаяся небольшой ячейкой, показана более подробно. В этом варианте ячейка 10 разделена на периферийную часть, расположенную дальше от узла eNodeB 100-2, и центральную часть (т.е. центральную часть, находящуюся ближе к узлу eNodeB 100-2), отличную от периферийной части. В центральной части ячейки 10 конфигурацию режима TDD задают динамически. С другой стороны, в периферийной части ячейки 10 конфигурацию режима TDD задают такой же или аналогичной конфигурации в макроячейке. Кроме того, например, в периферийной части ячейки 10 конфигурацию режима TDD задают статическим или квазистатическим образом.
Например, в ячейке 10, являющейся небольшой ячейкой, используют технологию агрегирования нескольких несущих. Когда совокупность нескольких несущих СС содержит несущие CC 1 и CC 2, несущую СС 1 используют в качестве ресурсов связи для терминала UE 200, расположенного в центральной части ячейки, а несущую СС 2 используют в качестве ресурсов связи для терминала UE 200, расположенного в периферийной части (и в центральной части) ячейки 10. Для несущей СС 1, конфигурацию режима TDD задают динамически на основе трафика. Для несущей СС 2, конфигурацию режима TDD задают (например, статическим или квазистатическим образом) такой же или аналогичной конфигурации в макроячейке.
При таком задании конфигурации режима TDD и выделении ресурсов связи, в ячейке 10 ресурсы связи частотного диапазона, в котором направление связи задают динамически, выделяют только терминалу UE 200, находящемуся в центральной части ячейки 10, являющейся небольшой ячейкой. Это позволяет уменьшить мощность передач, использующих эти ресурсы связи, в ячейке 10. В результате, сигнал восходящей линии, передаваемый с использованием ресурсов связи ячейки 10, не создает существенных взаимных помех с сигналом нисходящей линии макроячейки 30, а сигнал нисходящей линии, передаваемый с использованием ресурсов связи ячейки 10, не создает существенных взаимных помех с сигналом восходящей линии макроячейки 30. В частности, в частотном диапазоне, в котором направление связи задают динамически, взаимные помехи между небольшой ячейкой и макроячейкой, такие как показаны на фиг. 5 и 6, по существу не возникают.
Более того, расстояние между терминалом UE 200, расположенным в центральной части ячейки 10, являющейся небольшой ячейкой, и узлом eNodeB 100-2 меньше расстояния между узлом eNodeB 31 и узлом eNodeB 100-2, вследствие чего сигнал нисходящей линии макроячейки 30 не создает существенных взаимных помех с сигналом восходящей линии ячейки 10. Кроме того, расстояние между терминалом UE 200, расположенным в центральной части ячейки 10, являющейся небольшой ячейкой, и узлом eNodeB 100-2 меньше расстояния между этим терминалом UE 200 и терминалом UE 200, осуществляющим связь с узлом eNodeB 31, вследствие чего сигнал восходящей линии макроячейки 30 не создает существенных взаимных помех с сигналом нисходящей линии ячейки 10. В частности, в частотном диапазоне, в котором направление связи задают динамически, взаимные помехи между макроячейкой и небольшой ячейкой, такие как показано на фиг. 5 и 6, по существу не возникают.
Отметим, что в ячейке 10, представляющей собой небольшую ячейку, терминалу UE 200, расположенному в периферийной части этой ячейки 10, выделяют только ресурсы связи частотного диапазона (несущей СС 2), в котором разница в направлениях связи относительно макроячейки 30 мала. Поэтому в таком частотном диапазоне, взаимные помехи, такие как показано на фиг. 5 и 6, по существу не возникают.
Таким образом, в системе радиосвязи, использующей режим TDD, посредством динамического задания направления связи можно уменьшить взаимные помехи между макроячейкой и небольшой ячейки, увеличив при этом пропускную способность системы связи.
3.2. Конфигурация узла eNodeB
Пример конфигурации узла eNodeB 100-2 согласно второму варианту будет рассмотрен со ссылками на фиг. 17. Эта фиг. 17 представляет блок-схему, показывающую пример конфигурации узла eNodeB 100-2 согласно второму варианту. Как показано на фиг. 17, узел eNodeB 100-2 содержит модуль 110 радиосвязи, модуль 120 для связи с сетью, запоминающее устройство 130 и процессорный модуль 150.
Здесь модуль ПО радиосвязи, модуль 120 для связи с сетью и запоминающее устройство 130 во втором варианте не отличаются от соответствующих узлов первого варианта. Кроме того, в процессорном модуле 150 модуль 141 определения местонахождения терминала, модуль 143 для измерения интенсивности трафика и модуль 147 управления ресурсами во втором варианте не отличаются от соответствующих модулей первого варианта. Поэтому здесь будут рассмотрены только модуль 155 для задания направления связи и модуль 159 управления мощностью.
Модуль 155 для задания направления связи
Модуль 155 для задания направления связи динамически задает направление связи для каждого субкадра в первом частотном диапазоне, а также задает направление связи для каждого субкадра во втором частотном диапазоне таким образом, чтобы уменьшить разницу в направлениях связи между ячейкой 10 и ячейкой, взаимосвязанной с этой ячейкой 10. В этом варианте ячейка 10 представляет собой небольшую ячейку, а взаимосвязанная с ней ячейка представляет собой макроячейку, закрывающую всю или часть ячейки 10. Например, модуль 155 для задания направления связи динамически задает конфигурацию режима TDD для несущей СС 1 на основе интенсивности трафика в восходящей или в нисходящей линии. В качестве примера, конфигурацию режима TDD для несущей СС 1 задают через промежутки времени протяженностью от 10 мс до нескольких десятков миллисекунд. Кроме того, модуль 155 для задания направления связи задает конфигурацию режима TDD для несущей СС 2, такую же или аналогичную конфигурации режима TDD для несущей СС 2 в макроячейке 30. В качестве примера, модуль 155 для задания направления связи получает сообщение о конфигурации режима TDD для несущей СС 2 в макроячейке 30 от узла eNodeB 31 через модуль 120 для связи с сетью.
Отметим, что в макроячейке 30 терминалу UE 200 могут быть выделены ресурсы связи в частотном диапазоне, соответствующем местонахождению этого терминала UE 200. В таком случае, если ячейка 10 располагается в периферийной части макроячейки 30, второй частотный диапазон (например, несущая СС 2) может представлять собой частотный диапазон, выделяемый терминалу UE 200, находящемуся в периферийной части макроячейки 30. Кроме того, если ячейка 10 не находится в периферийной части макроячейки 30 (т.е. ячейка 10 расположена в центральной части), второй частотный диапазон может представлять собой частотный диапазон, выделяемый терминалу UE 200, не находящемуся в периферийной части макроячейки 30 (т.е. терминалу UE 200, расположенному в центральной части).
Модуль 159 управления мощностью
Модуль 159 управления мощностью осуществляет управление мощностью передач в ячейке 10. Например, этот модуль 159 управления мощностью осуществляет управление мощностью передач модуля ПО радиосвязи. Например, модуль 159 управления мощностью выделяет небольшую мощность передач для нисходящей линии в первом частотном диапазоне (например, для несущей СС 1) и большую мощность передач для нисходящей линии во втором частотном диапазоне (например, для несущей СС 2).
Кроме того, например, узел eNodeB 100-2 дает команду терминалу UE 200, который находится в центральной части ячейки 10 и которому выделены ресурсы связи в первом частотном диапазоне (например, на несущей CC 1) для восходящей линии, назначить небольшую мощность передач для восходящей линии в первом частотном диапазоне. Узел eNodeB 100-1 дает также команду терминалу UE 200, который находится в периферийной части ячейки 10 и которому выделены ресурсы связи во втором частотном диапазоне (например, на несущей CC 2) для восходящей линии, назначить большую мощность передач для восходящей линии во втором частотном диапазоне.
Отметим, что модуль 159 управления мощностью может потребовать, чтобы узел eNodeB 31 макроячейки 30 уменьшил мощность передач в макроячейке 30 в субкадре, в котором направление связи во втором частотном диапазоне в ячейке 10 отличается от направления связи во втором частотном диапазоне в макроячейке 30. Например, модуль 159 управления мощностью сообщает узлу eNodeB 31, через модуль 120 для связи с сетью, о субкадре, в котором направление связи на несущей СС 2 в ячейке 10 отличается от направления связи на несущей СС 2 в макроячейке 30. Благодаря такому уменьшению мощности передач в макроячейке 30, можно еще больше уменьшить взаимные помехи между сигналом нисходящей линии в макроячейке 30 и сигналом восходящей линии в ячейке 10 и взаимные помехи между сигналом восходящей линии в макроячейке 30 и сигналом нисходящей линии в ячейке 10.
3.3. Последовательность операций
Далее пример процедуры управления связью согласно второму варианту будет рассмотрен со ссылками на фиг. 18. Эта фиг. 18 представляет логическую схему, показывающую пример процедуры управления связью согласно второму варианту. Эта процедура управления связью выполняется в узле eNodeB 100-2. Этапы S501-S505 и S511-S517 процедуры управления связью согласно первому варианту, рассмотренные со ссылками на фиг. 10, соответствуют этапам S601 - S605 и S611-S617 процедуры управления связью согласно второму варианту. Поэтому здесь будет рассмотрен только этап S607, составляющий разницу между примером процедуры управления связью согласно первому варианту, описанным со ссылками на фиг. 10, и примером процедуры управления связью согласно второму варианту.
На этапе S607 модуль 155 для задания направления связи определяет, получил ли сам этот модуль 155 для задания направления связи сообщение о направлении связи (т.е. конфигурацию режима TDD) для несущей СС 2 в макроячейке 30 от узла eNodeB 31 через модуль 120 для связи с сетью. Если модуль 155 для задания направления связи получил сообщение о направлении связи, процедура управления переходит к этапу S611. В противном случае процедура управления переходит к этапу S613.
4. Третий вариант
4.1. Общий обзор
Далее будет рассмотрен третий вариант настоящего изобретения. В третьем варианте ресурсы связи в субкадре, в котором направление связи в ячейке отличается от направления связи в ячейке, соседствующей с рассматриваемой ячейкой, не выделяют терминалу, находящемуся в периферийной части рассматриваемой ячейки. Третий вариант будет более конкретно описан со ссылками на фиг. 19.
Эта фиг. 19 представляет схему для общего описания третьего варианта. На фиг. 19 показаны ячейка 10а и ячейка 10b, соседствующая с ячейкой 10а. В ячейке 10а и в ячейке 10b направление связи (т.е. конфигурацию режима TDD) задают динамически для каждого субкадра. В качестве примера, в некотором радио кадре в ячейке 10а задают конфигурацию режима TDD, соответствующую конфигурации 0, показанной на фиг. 3, для каждого частотного диапазона. Кроме того, в этом же самом радио кадре в ячейке 10b задают конфигурацию режима TDD, соответствующую конфигурации 6, показанной на фиг. 3, для каждого частотного диапазона. В таком случае, субкадром, в котором направление связи в ячейке 10а отличается от направления связи в ячейке 10b, является субкадр #9. Поэтому, хотя в субкадрах #0-#8 нет таких взаимных помех, как показаны на фиг. 4, подобные взаимные помехи возникают в субкадре #9. Вследствие этого, в рассматриваемом варианте, хотя ресурсы связи в субкадрах #0-#8 могут быть выделены любому терминалу UE 200, ресурсы связи в субкадре #9 не выделяют терминалу UE 200, находящемуся в периферийной части ячейки 10. В частности, ресурсы связи в субкадре #9 выделяют только терминалу UE 200, расположенному в центральной части ячейки 10.
Благодаря выделению ресурсов связи таким способом, ресурсы связи выделяют только терминалу UE 200, расположенному в центральной части ячейки 10, в субкадре радио кадра, в котором направление связи различается между соседними ячейками. Поэтому мощность передач в этом субкадре может быть уменьшена. В результате, в рассматриваемом субкадре сигнал восходящей линии ячейки 10 не создает существенных взаимных помех с сигналом нисходящей линии соседней ячейки, а сигнал нисходящей линии ячейки 10 не создает существенных взаимных помех с сигналом восходящей линии соседней ячейки. В частности, даже в субкадре, в котором направление связи различается между соседними ячейками, такие помехи, как показаны на фиг. 4, по существу не возникают. Кроме того, безусловно, даже в субкадре в составе радио кадра, в котором направление связи в соседних ячейках одинаковое, такие помехи, как показаны на фиг. 4, по существу не возникают. Поэтому в системе радиосвязи, использующей режим TDD, посредством динамического задания направления связи можно уменьшить помехи между соседними ячейками и при этом повысить пропускную способность связи в системе.
4.2. Конфигурация узла eNodeB
Пример конфигурации узла eNodeB 100-3 согласно третьему варианту будет рассмотрен со ссылками на фиг. 20. Эта фиг. 20 представляет блок-схему, показывающую пример конфигурации узла eNodeB 100-3 согласно третьему варианту. На фиг. 20 показано, что узел eNodeB 100-3 содержит модуль 110 радиосвязи, модуль 120 для связи с сетью, запоминающее устройство 130 и процессорный модуль 160.
Здесь модуль ПО радиосвязи, модуль 120 для связи с сетью и запоминающее устройство 130 согласно третьему варианту не отличаются от соответствующих модулей согласно первому варианту. Кроме того, в составе процессорного модуля 160 модуль 141 определения местонахождения терминала и модуль 143 для измерения интенсивности трафика согласно третьему варианту не отличаются от соответствующих модулей согласно первому варианту. Поэтому здесь будут рассмотрены только модуль 165 для задания направления связи, модуль 167 управления ресурсами и модуль 169 управления мощностью.
Модуль 165 для задания направления связи
Модуль 165 для задания направления связи динамически задает направление связи для каждого субкадра в одном или нескольких частотных диапазонах. Например, совокупность этих одного или нескольких частотных диапазонов содержит несущие СС 1 и СС 2. Модуль 165 для задания направления связи динамически задает какие-либо конфигурации режима TDD из конфигураций, показанных на фиг. 3, для несущей СС 1 и несущей СС 2 на основе интенсивности трафика в восходящей линии или в нисходящей линии. В качестве примера, конфигурацию режима TDD задают через промежутки времени от 10 мс до нескольких десятков миллисекунд. Для несущих СС 1 и СС 2 могут быть заданы одинаковые конфигурации режима TDD или разные конфигурации режима TDD.
Кроме того, модуль 165 для задания направления связи сообщает соседней ячейке о направлении связи (т.е. о конфигурации режима TDD) в ячейке 10, например, через модуль 120 для связи с сетью.
Модуль 167 управления ресурсами
Модуль 167 управления ресурсами осуществляет управление выделением ресурсов связи терминалу UE 200 на основе задания направления связи в канале связи, в котором направление связи может быть динамически задано в каждом субкадре, и местонахождения этого терминала UE 200 в ячейке 10. В частности, в рассматриваемом варианте модуль 167 управления ресурсами не выделяет ресурсы связи в субкадре, в котором направление связи в ячейке 10 отличается от направления связи в ячейке, взаимосвязанной с ячейкой 10, терминалу UE 200, находящемуся в периферийной части ячейки 10. Эта взаимосвязанная ячейка представляет собой ячейку, соседствующую с ячейкой 10. Например, когда субкадр, в котором направление связи различается между ячейкой 10 и соседней ячейкой, является субкадром #9, модуль 167 управления ресурсами не выделяет ресурсы связи в этом субкадре #9 терминалу UE 200, находящемуся в периферийной части ячейки 10. В частности, модуль 167 управления ресурсами выделяет ресурсы связи в субкадре #9 только терминалу UE 200, расположенному в центральной части ячейки 10. Кроме того, модуль 167 управления ресурсами выделяет ресурсы связи в субкадрах #0-#8 и терминалу UE 200, находящемуся в периферийной части ячейки 10, и терминалу UE 200, расположенному в центральной части ячейки 10.
Отметим, что модуль 167 управления ресурсами получает сообщение о направлении связи (т.е. конфигурации режима TDD) в соседней ячейке от узла eNodeB 100-3 этой соседней ячейки.
Модуль 169 управления мощностью
Модуль 169 управления мощностью осуществляет управление мощностью передач в ячейке 10. Например, модуль 169 управления мощностью уменьшает мощность передач в ячейке 10 в субкадре, в котором направление связи в ячейке 10 отличается от направления связи в ячейке, соседствующей с ячейкой 10. Более конкретно, модуль 169 управления мощностью выделяет небольшую мощность передач для нисходящей линии. Кроме того, модуль 169 управления мощностью дает команду терминалу UE 200, находящемуся в центральной части ячейки 10, выделить небольшую мощность передач для восходящей линии.
4.4. Последовательность операций
Далее, пример процедуры управления связью согласно третьему варианту будет описан со ссылками на фиг. 21. Эта фиг. 21 представляет логическую схему, показывающую пример процедуры управления связью согласно третьему варианту. Отметим, что эта процедура управления связью выполняется в узле eNodeB 100-3.
Сначала, на этапе S701, модуль 141 определения местонахождения терминала определяет местонахождение терминала UE 200 в ячейке 10. Кроме того, на этапе S703, модуль 143 для измерения интенсивности трафика выполняет измерение интенсивности трафика в восходящей линии и интенсивности трафика в нисходящей линии в ячейке 10.
На этапе S705 модуль 165 для задания направления связи задает направление связи (т.е. конфигурацию режима TDD) для каждого субкадра на основе измеренных интенсивностей трафика. Кроме того, на этапе S707, модуль 165 для задания направления связи сообщает соседней ячейке о направлении связи в ячейке 10 через, например, модуль 120 для связи с сетью. Кроме того, на этапе S709, модуль 167 управления ресурсами получает сообщение о направлении связи (т.е. конфигурации режима TDD) в соседней ячейке от этой соседней ячейки.
На этапе S711 модуль 167 управления ресурсами выделяет ресурсы связи в субкадре, в котором направление связи в ячейке 10 отличается от направления связи в ячейке, соседствующей с этой ячейкой 10, терминалу UE 200, не находящемуся в периферийной части ячейки 10 (т.е. терминалу UE 200, расположенному в центральной части ячейки 10). Кроме того, на этапе S713 модуль 167 управления ресурсами выделяет ресурсы связи в субкадре, в котором направление связи в ячейке 10 является таким же, как направление связи в ячейке, соседствующей с ячейкой 10, терминалу UE 200, расположенному в ячейке 10.
На этапе S715 модуль ПО радиосвязи осуществляет связь с терминалом UE 200 с использованием выделенных ресурсов связи.
5. Четвертый вариант
5.1. Общий обзор
Третий вариант был конкретно описан со ссылками на операции узла eNodeB в ячейке, соседствующей с другой ячейкой. Далее, четвертый вариант настоящего изобретения будет конкретно рассмотрен со ссылками на операции узла eNodeB в небольшой ячейке, закрывающей всю или часть макроячейки. В этом четвертом варианте ресурсы связи небольшой ячейки в субкадре, в котором направление связи в небольшой ячейке отличается от направления связи в макроячейке, закрывающей всю или часть небольшой ячейки, не выделяют терминалу, находящемуся в периферийной части небольшой ячейки. Четвертый вариант будет теперь более конкретно рассмотрен со ссылками на фиг. 22.
Эта фиг. 22 представляет схему для общего описания четвертого варианта. На фиг. 22 показаны ячейка 10, представляющая собой небольшую ячейку, и макроячейка 30, закрывающая все или часть ячейки 10. В ячейке 10 направление связи (т.е. конфигурацию режима TDD) динамически задают для каждого субкадра. С другой стороны, в макроячейке 30 направление связи, (т.е. конфигурацию режима TDD) можно задавать динамическим или, в качестве альтернативы, статическим или квазистатическим образом, для каждого субкадра. В качестве примера, в некотором радио кадре в ячейке 10 в каждом частотном диапазоне задают конфигурацию режима TDD, соответствующую конфигурации 6, показанной на фиг. 3. Кроме того, в этом же радио кадре в макроячейке 30 в каждом частотном диапазоне задают конфигурацию режима TDD, соответствующую конфигурации 0, показанной на фиг. 3. В таком случае, субкадр, в котором направление связи в ячейке 10 отличается от направления связи в макроячейке 30, является субкадром #9. Поэтому, хотя взаимные помехи, такие как показаны на фиг. 5 и 6, не возникают в субкадрах #0-#8, такие взаимные помехи, как показаны на фиг. 5 и 6, могут возникать в субкадре #9. Вследствие этого в рассматриваемом варианте в ячейке 10, тогда как ресурсы связи в субкадрах #0-#8 выделяют любому терминалу UE 200, ресурсы связи в субкадре #9 не выделяют терминалу UE 200, расположенному в периферийной части ячейки 10. В частности, в ячейке 10 ресурсы связи в субкадре #9 выделяют только терминалу UE 200, находящемуся в центральной части ячейки 10.
Благодаря выделению ресурсов связи таким способом, ресурсы связи в ячейке 10 в субкадре радио кадра, в котором направление связи различается между ячейкой 10, представляющей собой небольшую ячейку, и макроячейкой 30, выделяют только терминалу UE 200, расположенному в центральной части этой ячейки 10. Вследствие этого в ячейке 10 можно уменьшить мощность передач в этом субкадре. В результате, в этом субкадре сигнал восходящей линии ячейки 10 не создает существенных взаимных помех с сигналом нисходящей линии макроячейки 30, а сигнал нисходящей линии ячейки 10 не создает существенных взаимных помех с сигналом восходящей линии макроячейки 30. В частности, даже в субкадре, в котором направление связи различается между соседними ячейками, такие взаимные помехи между небольшой ячейкой и макроячейкой, как показаны на фиг. 5 и 6, по существу не возникают.
Более того, расстояние между терминалом UE 200, расположенным в центральной части ячейки 10, являющейся небольшой ячейкой, и узлом eNodeB 100-4 меньше расстояния между узлом eNodeB 31 и узлом eNodeB 100-4, вследствие чего сигнал нисходящей линии макроячейки 30 не создает существенных взаимных помех с сигналом восходящей линии ячейки 10. Кроме того, расстояние между терминалом UE 200, расположенным в центральной части ячейки 10, и узлом eNodeB 100-4 меньше расстояния между этим терминалом UE 200 и другим терминалом UE 200, осуществляющим связь с узлом eNodeB 31, вследствие чего сигнал восходящей линии макроячейки 30 не создает существенных взаимных помех с сигналом нисходящей линии ячейки 10. В частности даже в субкадре, в котором направление связи различается между соседними ячейками, такие взаимные помехи между макроячейкой и небольшой ячейкой, как показаны на фиг. 5 и 6, по существу не возникают.
Кроме того, безусловно, даже в субкадре в составе радио кадра, в котором направление связи в ячейке 10 и в макроячейке 30 одинаковое, такие взаимные помехи, как показаны на фиг. 5 и 6, не возникают.
Поэтому в системе радиосвязи, использующей режим TDD, посредством динамического задания направления связи можно уменьшить помехи между соседними ячейками и при этом повысить пропускную способность связи в системе.
5.2. Конфигурация узла eNodeB
Пример конфигурации узла eNodeB 100-4 согласно четвертому варианту будет рассмотрен со ссылками на фиг. 23. Эта фиг. 23 представляет блок-схему, показывающую пример конфигурации узла eNodeB 100-4 согласно четвертому варианту. Как показано на фиг. 23, узел eNodeB 100-4 содержит модуль ПО радиосвязи, модуль 120 для связи с сетью, запоминающее устройство 130 и процессорный модуль 170.
Здесь модуль ПО радиосвязи, модуль 120 для связи с сетью и запоминающее устройство 130 согласно четвертому варианту не отличаются от соответствующих модулей согласно третьему варианту. Кроме того, даже в составе процессорного модуля 170 модуль 141 определения местонахождения терминала, модуль 143 для измерения интенсивности трафика и модуль 165 для задания направления связи согласно четвертому варианту не отличаются от соответствующих модулей согласно третьему варианту. Поэтому здесь будут рассмотрены только модуль 177 управления ресурсами и модуль 179 управления мощностью.
Модуль 177 управления ресурсами
Модуль 177 управления ресурсами осуществляет управление выделением ресурсов связи терминалу UE 200 на основе задания направления связи в канале связи, в котором направление связи может быть задано динамически для каждого субкадра, и местонахождения терминала UE 200 в ячейке 10. В частности, в этом варианте модуль 177 управления ресурсами не выделяет ресурсы связи в субкадре, в котором направление связи в ячейке 10 отличается от направления связи в ячейке, взаимосвязанной с ячейкой 10, терминалу UE 200, расположенному в периферийной части ячейки 10. Здесь ячейка 10 представляет собой небольшую ячейку, а взаимосвязанная с ней ячейка является макроячейкой, закрывающей всю или часть ячейки 10. Например, когда субкадр, в котором направление связи различается между ячейкой 10 и макроячейкой 30, является субкадром #9, модуль 177 управления ресурсами не выделяет ресурсы связи в этом субкадре #9 терминалу UE 200, находящемуся в периферийной части ячейки 10. Конкретнее, модуль 177 управления ресурсами выделяет ресурсы связи в субкадре #9 только терминалу UE 200, расположенному в центральной части ячейки 10. Кроме того, модуль 177 управления ресурсами выделяет ресурсы связи в субкадрах #0-#8 терминалу UE 200, находящемуся в периферийной части ячейки 10, и терминалу UE 200, расположенному в центральной части этой ячейки 10.
Отметим, что модуль 177 управления ресурсами получает сообщение о направлении связи (т.е. конфигурации режима TDD) в макроячейке 30 от узла eNodeB 31 этой макроячейки 30.
Модуль 179 управления мощностью
Модуль 179 управления мощностью осуществляет управление мощностью передач в ячейке 10. Например, модуль 179 управления мощностью уменьшает мощность передач в ячейке 10 в субкадре, в котором направление связи в ячейке 10 отличается от направления связи в макроячейке 30. Более конкретно, модуль 179 управления мощностью выделяет небольшую мощность передач для нисходящей линии. Кроме того, модуль 179 управления мощностью дает команду терминалу UE 200, находящемуся в центральной части ячейки 10, выделить небольшую мощность передач для восходящей линии.
Отметим, что модуль 179 управления мощностью может потребовать, чтобы узел eNodeB 31 макроячейки 30 уменьшил мощность передач в макроячейке 30 в субкадре, в котором направление связи в ячейке 10 отличается от направления связи в макроячейке 30. Например, модуль 179 управления мощностью сообщает узлу eNodeB 31, через модуль 120 для связи с сетью, о субкадре, в котором направление связи в ячейке 10 отличается от направления связи в макроячейке 30. Благодаря такому уменьшению мощности передач в макроячейке 30, можно еще больше уменьшить взаимные помехи между сигналом нисходящей линии в макроячейке 30 и сигналом восходящей линии в ячейке 10 и взаимные помехи между сигналом восходящей линии в макроячейке 30 и сигналом нисходящей линии в ячейке 10.
5.3. Последовательность операций
Далее, пример процедуры управления связью согласно четвертому варианту будет рассмотрен со ссылками на фиг. 24. Эта фиг. 24 представляет логическую схему, показывающую пример процедуры управления связью согласно четвертому варианту. Отметим, что эта процедура управления связью выполняется в узле eNodeB 100-4. Этапы S701-S705 и S715 процедуры управления связью согласно третьему варианту, описанные со ссылками на фиг. 21, соответствуют этапам S801-S805 и S815 процедуры управления связью согласно четвертому варианту. Поэтому здесь будут рассмотрены только этапы S807, S811 и S813, составляющие разницу между примером процедуры управления связью согласно третьему варианту, описанным со ссылками на фиг. 21, и примером процедуры управления связью согласно четвертому варианту.
На этапе S807 модуль 177 управления ресурсами получает сообщение о направлении связи (т.к. конфигурации режима TDD) в макроячейке 30 от узла eNodeB 31 этой макроячейки 30.
На этапе S811 модуль 177 управления ресурсами выделяет ресурсы связи в субкадре, в котором направление связи в ячейке 10 отличается от направления связи в макроячейке 30, терминалу UE 200, который не находится в периферийной части ячейки 10 (т.е. терминалу UE 200, расположенному в центральной части ячейки 10). Кроме того, на этапе S813 модуль 177 управления ресурсами выделяет ресурсы связи в субкадре, в котором направление связи в ячейке 10 является таким же, как направление связи в макроячейке 30, терминалу UE 200, находящемуся в ячейке 10.
6. Резюме
Узел eNodeB 100 согласно вариантам настоящего изобретения был описан выше со ссылками на фиг. 1-24. В соответствии с этими вариантами выделением ресурсов связи терминалу UE 200 управляют на основе задания направления связи в канале связи, в котором направление связи может быть задано динамически для каждого субкадра, и местонахождения терминала UE 200 в ячейке 10.
Например, как в первом варианте и во втором варианте, направление связи задают динамически для каждого субкадра в первом частотном диапазоне, а во втором частотном диапазоне направление связи для каждого субкадра задают таким образом, чтобы уменьшить разницу в направлениях связи между ячейкой 10 и ячейкой (соседней ячейкой или макроячейкой), взаимосвязанной с ячейкой 10. Причем ресурсы связи в первом частотном диапазоне не выделяют терминалу UE 200, расположенному в периферийной части ячейки 10.
Благодаря заданию конфигурации режима TDD и выделению ресурсов связи таким способом, ресурсы связи в частотном диапазоне, в котором направление связи задают динамически, выделяют только терминалу UE 200, находящемуся в центральной части ячейки 10. Вследствие этого можно уменьшить мощность передач с использованием этих ресурсов связи. В результате, сигнал восходящей линии, передаваемый с использованием этих ресурсов связи, не создает существенных взаимных помех с сигналом нисходящей линии взаимосвязанной ячейки, а сигнал нисходящей линии, передаваемый с использованием этих ресурсов связи, не создает существенных взаимных помех с сигналом восходящей линии взаимосвязанной ячейки. Конкретнее, в частотном диапазоне, в котором направление связи задают динамически, такие взаимные помехи, как показано на фиг. 4-6, по существу не возникают. Отметим, что терминалу UE 200, находящемуся в периферийной части ячейки 10, выделяют только ресурсы связи в частотном диапазоне, в котором разница в направлениях связи относительно взаимосвязанной ячейки невелика. Безусловно, в этом частотном диапазоне такие взаимные помехи, как показано на фиг. 4-6, по существу не возникают. Поэтому в системе радиосвязи, использующей режим TDD, посредством динамического задания направления связи можно уменьшить взаимные помехи между соседними ячейками и при этом увеличить пропускную способность связи в системе.
Кроме того, например, как в третьем варианте и в четвертом варианте, ресурсы связи в субкадре, в котором направление связи в ячейке 10 отличается от направления связи в ячейке (соседней ячейке или макроячейке), взаимосвязанной с ячейкой 10, не выделяют терминалу UE 200, расположенному в периферийной части ячейки 10.
Благодаря выделению ресурсов связи таким способом, в субкадре в составе радио кадра, в котором направление связи различается между ячейкой 10 и взаимосвязанной ячейкой, ресурсы связи выделяют только терминалу UE 200, находящемуся в центральной части ячейки 10. Вследствие этого, в ячейке 10 можно уменьшить мощность передач в этом субкадре. В результате, в этом субкадре сигнал восходящей линии ячейки 10 не создает существенных взаимных помех с сигналом нисходящей линии взаимосвязанной ячейки, а сигнал нисходящей линии ячейки 10 не создает существенных взаимных помех с сигналом восходящей линии взаимосвязанной ячейки. Конкретнее, даже в субкадре, в котором направление связи различается между ячейкой 10 и взаимосвязанной ячейкой, такие взаимные помехи, как показаны на фиг. 4-6, по существу не возникают. Кроме того, безусловно, даже в субкадре в составе радио кадра, в котором направление связи в соседних ячейках одинаковое, такие взаимные помехи, как показаны на фиг. 4-6, по существу не возникают. Поэтому в системе радиосвязи, использующей режим TDD, посредством динамического задания направления связи можно уменьшить взаимные помехи между соседними ячейками и при этом увеличить пропускную способность связи в системе.
Выше предпочтительные варианты настоящего изобретения были рассмотрены со ссылками на прилагаемые чертежи, хотя, безусловно, настоящее изобретение приведенными выше примерами не ограничивается. Специалист в рассматриваемой области может найти разнообразные изменения и модификации в пределах объема прилагаемой Формулы изобретения, и следует понимать, что все они будут естественным образом укладываться в технический объем настоящего изобретения.
Хотя, например, в приведенных выше вариантах предполагается, что система радиосвязи соответствует стандарту LTE или LTE-Advanced, предлагаемая технология этим примером не ограничивается. Например, система радиосвязи может быть подобной системам LTE или LTE-Advanced, либо может быть системой радиосвязи, соответствующей стандарту, являющемуся дальнейшим развитием стандарта LTE или LTE-Advanced.
Кроме того, хотя в рассмотренных выше вариантах устройство управления связью, осуществляющее функции управления связью в ячейке, представляет собой узел eNodeB согласно стандарту LTE или LTE-Advanced, предлагаемая технология этим примером не ограничивается. Например, устройство управления связью может представлять собой базовую станцию, соответствующую другому стандарту связи, или может быть устройством, составляющим часть базовой станции. Кроме того, устройство управления связью может представлять собой другое устройство, управляющее работой базовой станции.
Кроме того, хотя в приведенных выше вариантах терминал, осуществляющий связь в ячейке, представляет собой терминал UE согласно стандарту LTE или LTE-Advanced, предлагаемая технология этим примером не ограничивается. Например, указанный терминал может быть терминалом, соответствующим какому-либо другому стандарту связи.
Кроме того, предлагаемая технология может быть конфигурирована, как указано
ниже.
(1) Устройство управления связью, содержащее:
модуль радиосвязи, осуществляющий связь с одним или несколькими терминалами в ячейке по каналу связи, в котором направление связи может быть задано динамически для каждого субкадра, представляющего собой единицу времени для радиосвязи; и
модуль управления, осуществляющий управление выделением ресурсов связи терминалу на основе задания направления связи в канале связи и местонахождения этого терминала в ячейке.
(2) Устройство управления связью согласно (1), отличающееся тем, что
канал связи содержит по меньшей мере первый частотный диапазон и второй частотный диапазон,
устройство управления связью дополнительно содержит задающий модуль, который динамически задает направление связи в каждом субкадре первого частотного диапазона и задает направление связи в каждом субкадре второго частотного диапазона таким образом, чтобы уменьшить разницу в направлениях связи между рассматриваемой ячейкой и ячейкой, взаимосвязанной с рассматриваемой ячейкой, и
модуль управления не выделяет ресурсы связи первого частотного диапазона терминалу, находящемуся в периферийной части ячейки.
(3) Устройство управления связью согласно (2), отличающееся тем, что указанная взаимосвязанная ячейка представляет собой ячейку, соседствующую с рассматриваемой ячейкой.
(4) Устройство управления связью согласно (3), отличающееся тем, что
рассматриваемая ячейка представляет собой макроячейку, закрывающую всю или
часть небольшой ячейки, и
задающий модуль дает команду узлу связи в небольшой ячейке задать направление связи в каждом субкадре в небольшой ячейке таким образом, чтобы уменьшить разницу в направлениях связи между рассматриваемой ячейкой и небольшой ячейкой.
(5) Устройство управления связью согласно (4), отличающееся тем, что задающий модуль, когда небольшая ячейка находится в периферийной части
рассматриваемой ячейки, дает команду узлу связи в небольшой ячейке задать направление связи во втором частотном диапазоне в небольшой ячейке таким образом, чтобы уменьшить разницу в направлениях связи между рассматриваемой ячейкой и небольшой ячейкой.
(6) Устройство управления связью согласно (5), отличающееся тем, что
узел связи, когда небольшая ячейка располагается в периферийной части рассматриваемой ячейки, динамически задает направление связи в каждом субкадре частотного диапазона, отличного от второго частотного диапазона, и не выделяет ресурсы связи в этом отличном частотном диапазоне терминалу, находящемуся в периферийной части небольшой ячейки.
(7) Устройство управления связью согласно любому из пунктов (4)-(6), отличающееся тем, что
задающий модуль, когда небольшая ячейка не находится в периферийной части рассматриваемой ячейки, дает команду узлу связи в небольшой ячейке задать направление связи в первом частотном диапазоне в небольшой ячейке таким образом, чтобы уменьшить разницу в направлениях связи между рассматриваемой ячейкой и небольшой ячейкой.
(8) Устройство управления связью согласно (7), отличающееся тем, что
узел связи, когда небольшая ячейка не располагается в периферийной части рассматриваемой ячейки, динамически задает направление связи в каждом субкадре частотного диапазона, отличного от первого частотного диапазона, и не выделяет ресурсы связи в этом отличном частотном диапазоне терминалу, находящемуся в периферийной части небольшой ячейки
(9) Устройство управления связью согласно любому из пунктов (4)-(8), отличающееся тем, что
задающий модуль сообщает указанному узлу связи направление связи для каждого субкадра первого частотного диапазона или направление связи для каждого субкадра второго частотного диапазона, которое было задано посредством задающего модуля, и дает команду узлу связи задать направление связи для каждого субкадра в небольшой ячейке.
(10) Устройство управления связью согласно любому из пунктов (4)-(9), отличающееся тем, что
модуль управления уменьшает мощность передач в рассматриваемой ячейке в субкадре, в котором направление связи в рассматриваемой ячейке отличается от направления связи в небольшой ячейке.
(11) Устройство управления связью согласно (2), отличающееся тем, что
рассматриваемая ячейка представляет собой небольшую ячейку, и
взаимосвязанная ячейка представляет собой макроячейку, закрывающую всю или часть рассматриваемой ячейки.
(12) Устройство управления связью согласно (11), отличающееся тем, что
во взаимосвязанной ячейке терминалу выделяют ресурсы связи частотного диапазона, соответствующего местонахождению этого терминала, и
второй частотный диапазон представляет собой частотный диапазон, выделяемый терминалу, находящемуся в периферийной части взаимосвязанной ячейки, когда рассматриваемая ячейка располагается в периферийной части взаимосвязанной ячейки, и частотный диапазон, выделяемый терминалу, который не находится в периферийной части взаимосвязанной ячейки, когда рассматриваемая ячейка не располагается в периферийной части взаимосвязанной ячейки.
(13) Устройство управления связью согласно (11) или (12), отличающееся тем, что
модуль управления требует от узла связи взаимосвязанной ячейки уменьшить мощность передач во взаимосвязанной ячейке в субкадре, в котором направление связи во втором частотном диапазоне в рассматриваемой ячейке отличается от направления связи во втором частотном диапазоне во взаимосвязанной ячейке.
(14) Устройство управления связью согласно любому из пунктов (2)-(13), отличающееся тем, что
задающий модуль задает направление связи для каждого субкадра во втором частотном диапазоне статическим или квазистатическим образом.
(15) Устройство управления связью согласно любому из пунктов (2)-(14), отличающееся тем, что
каждый из диапазонов - и первый частотный диапазон, и второй частотный диапазон, представляет собой компонентную несущую.
(16) Устройство управления связью согласно (1), отличающееся тем, что
модуль управления не выделяет ресурсы связи в субкадре, в котором направление связи в рассматриваемой ячейке отличается от направления связи в ячейке, взаимосвязанной с рассматриваемой ячейкой, терминалу, находящемуся в периферийной области рассматриваемой ячейки.
(17) Устройство управления связью согласно (16), отличающееся тем, что указанная взаимосвязанная ячейка представляет собой ячейку, соседствующую с рассматриваемой ячейкой.
(18) Устройство управления связью согласно (16), отличающееся тем, что
рассматриваемая ячейка представляет собой небольшую ячейку, и
взаимосвязанная ячейка представляет собой макроячейку, закрывающую всю или часть рассматриваемой ячейки.
(19) Способ управления связью, содержащий:
осуществление связи с одним или несколькими терминалами в ячейке по каналу связи, в котором направление связи может быть задано динамически в каждом субкадре, представляющем собой единицу времени для радиосвязи; и
управление выделением ресурсов связи терминалу на основе задания направления связи в канале связи и местонахождения терминала в ячейке.
(20) Терминал, содержащий:
модуль радиосвязи, осуществляющий связь с базовой станцией в ячейке по каналу связи, в котором направление связи может быть задано динамически в каждом субкадре, представляющем собой единицу времени для радиосвязи,
отличающийся тем, что модуль радиосвязи осуществляет связь с базовой станцией в соответствии с выделением ресурсов связи самого терминалу со стороны базовой станции на основе задания направления связи в канале связи и местонахождения самого терминала в ячейке.
Список позиционных обозначений
10 ячейка
11, 31, 41 узел eNodeB
13, 33, 43 сигнал нисходящей линии
23, 25, 27 сигнал восходящей линии
21 абонентский терминал UE
30 макроячейка
40 небольшая ячейка
100 узел eNodeB
110 узел радиосвязи
120 модуль для связи с сетью
130 запоминающее устройство
140, 150, 160, 170 процессорный модуль
141 модуль определения местонахождения терминала
143 модуль для измерения интенсивности трафика
145, 155, 165 модуль для задания направления связи
147, 167, 177 модуль управления ресурсами
149, 159, 169, 179 модуль управления мощностью
200 абонентский терминал (UE)
210 модуль радиосвязи
220 запоминающее устройство
230 процессорный модуль
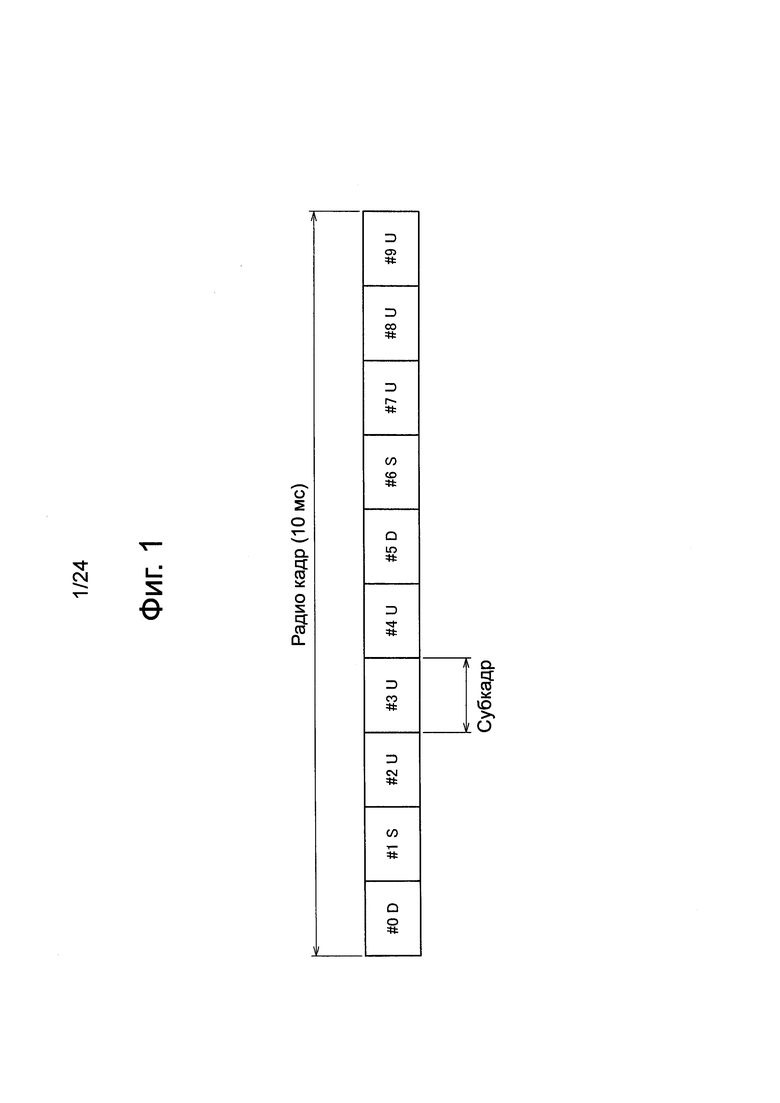
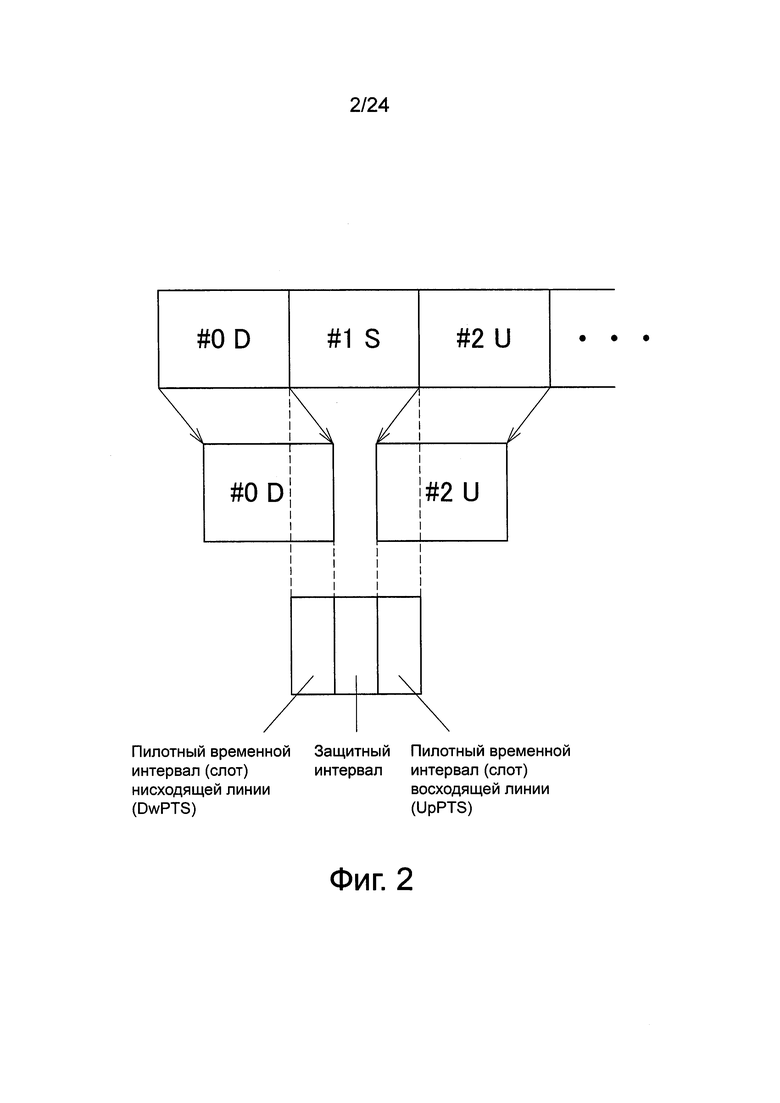
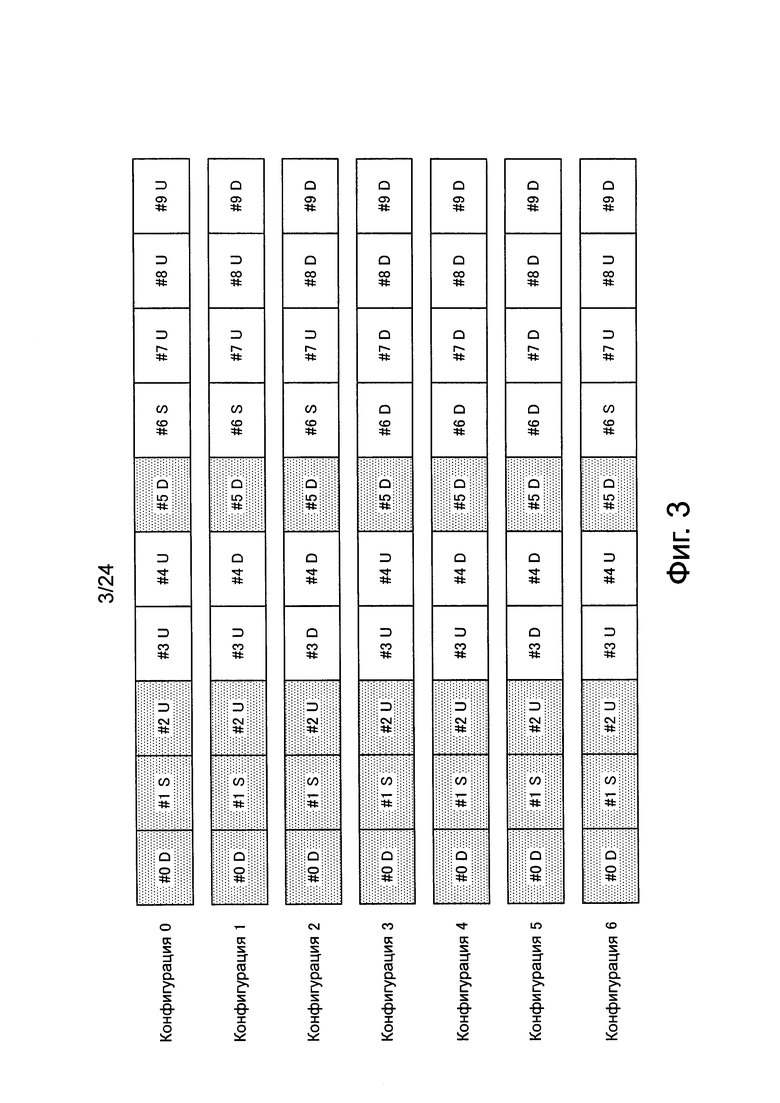
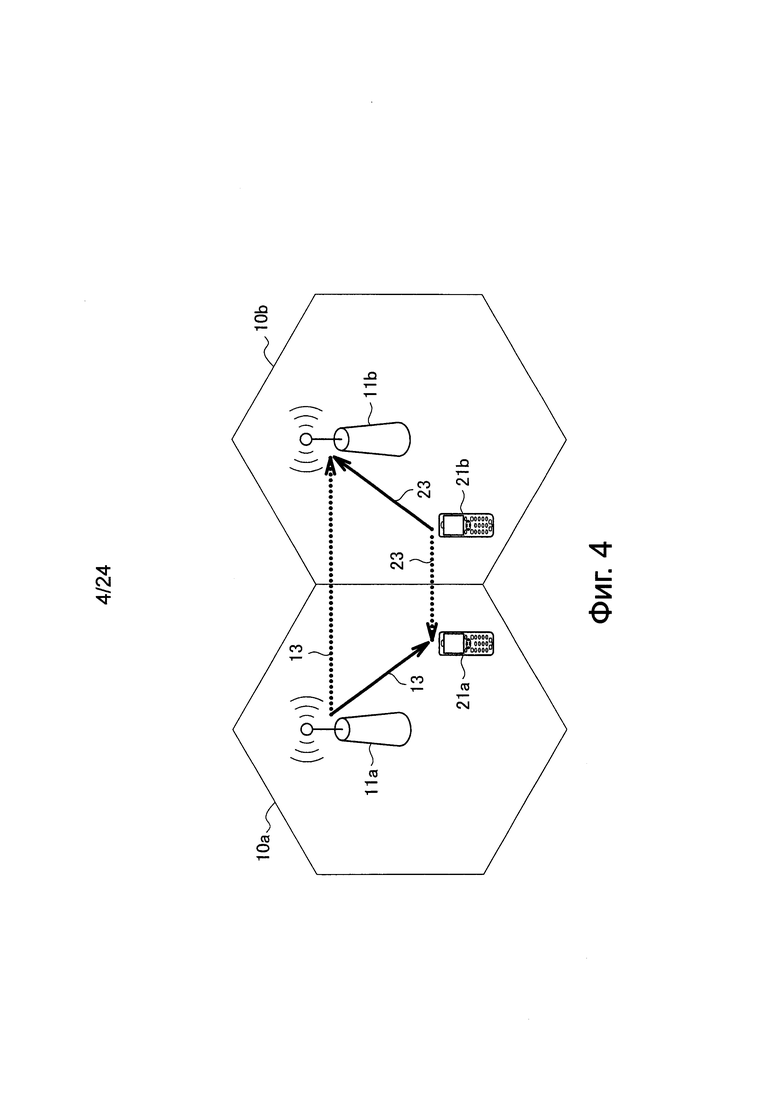
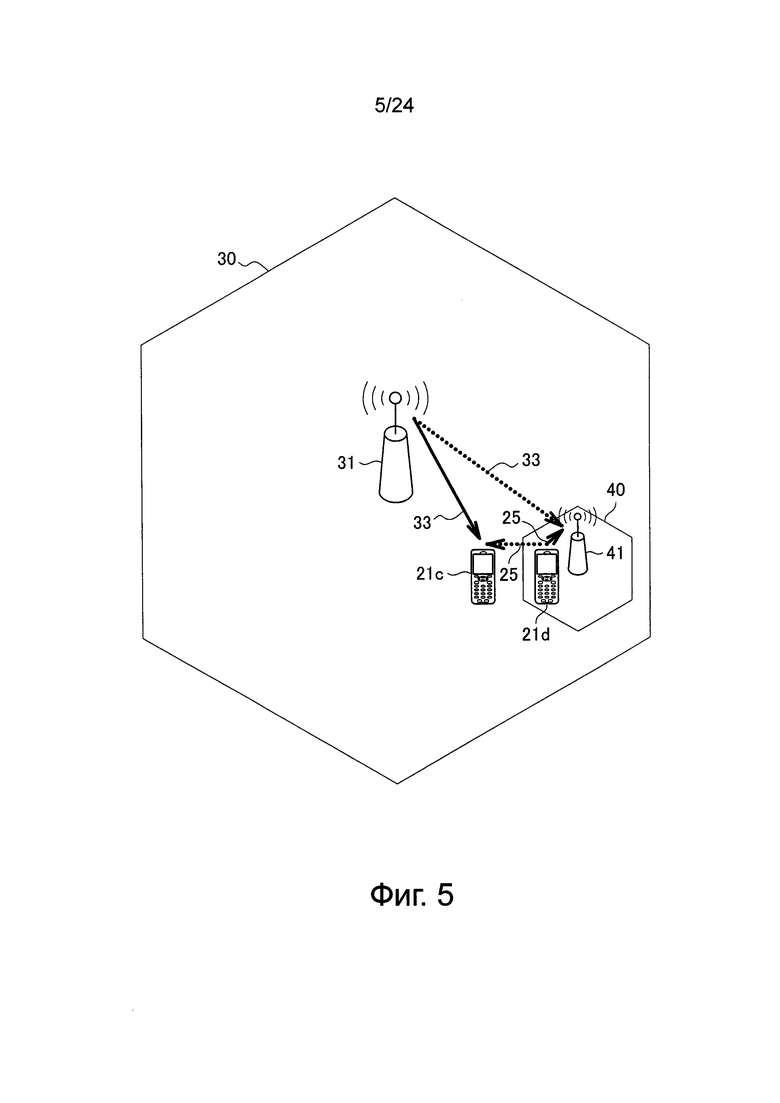
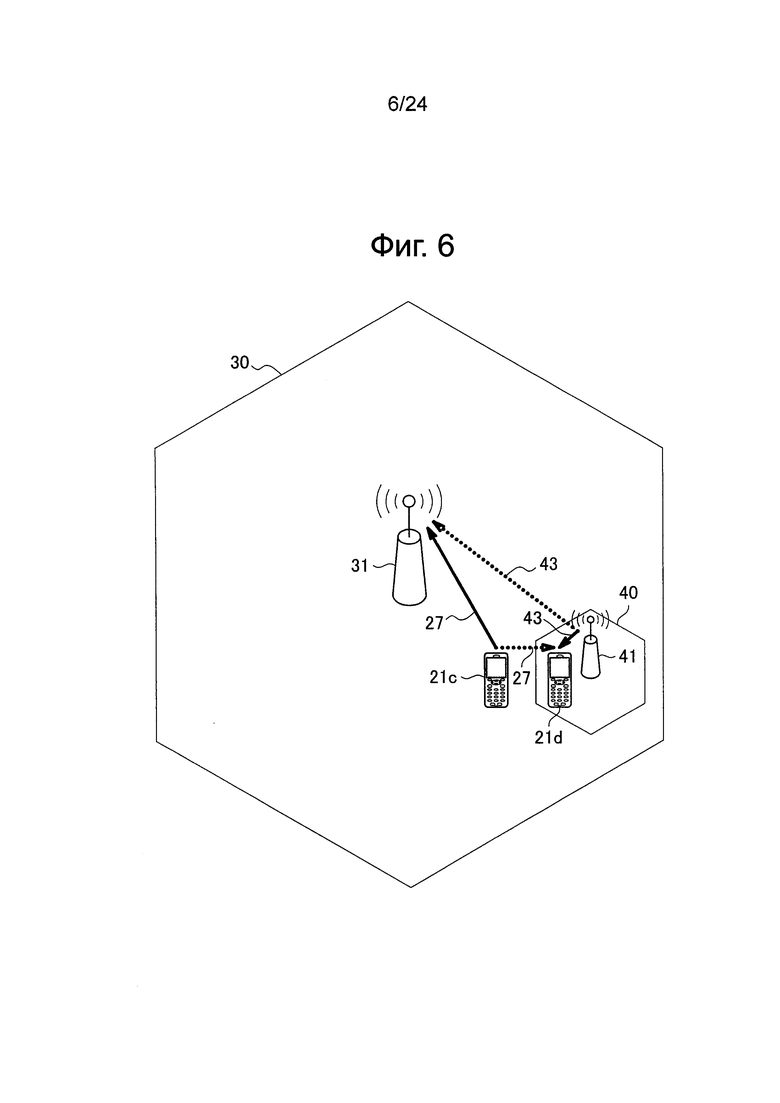
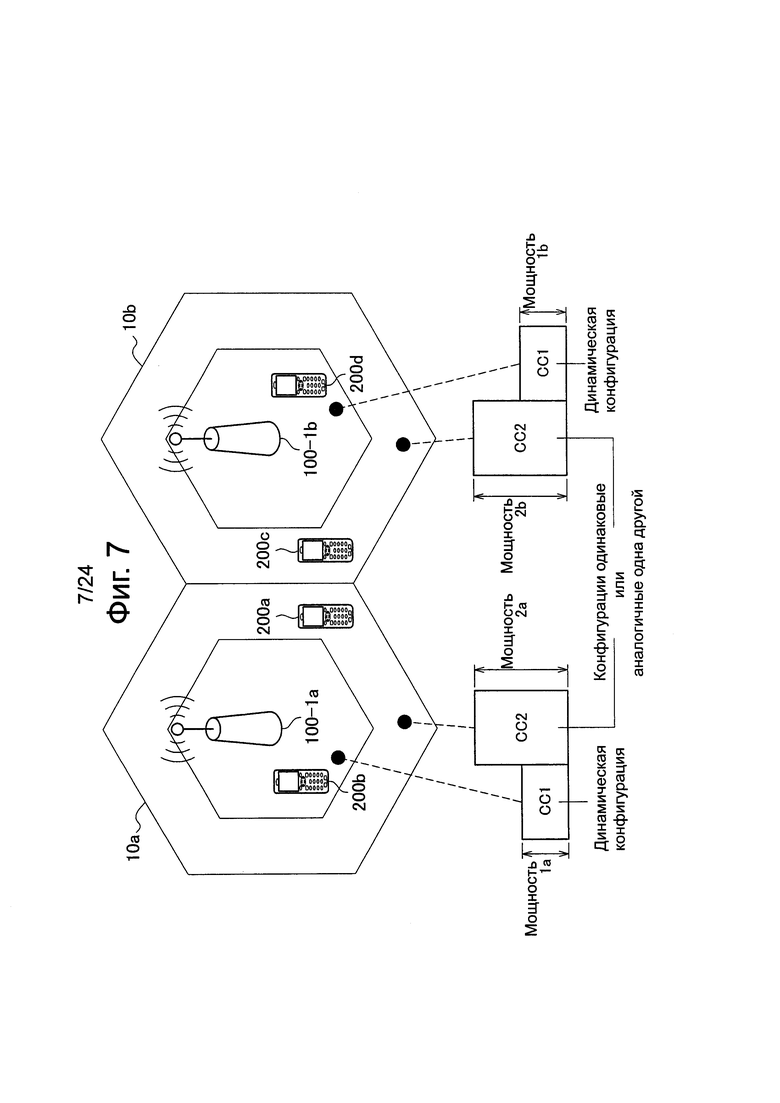
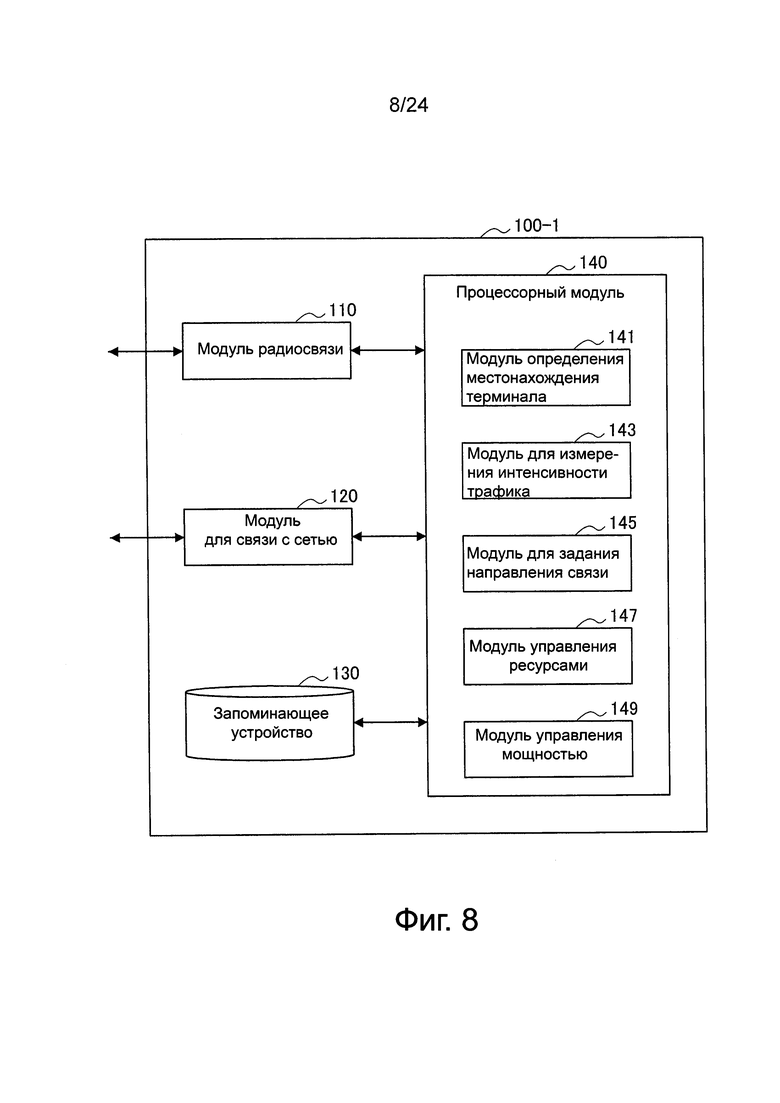
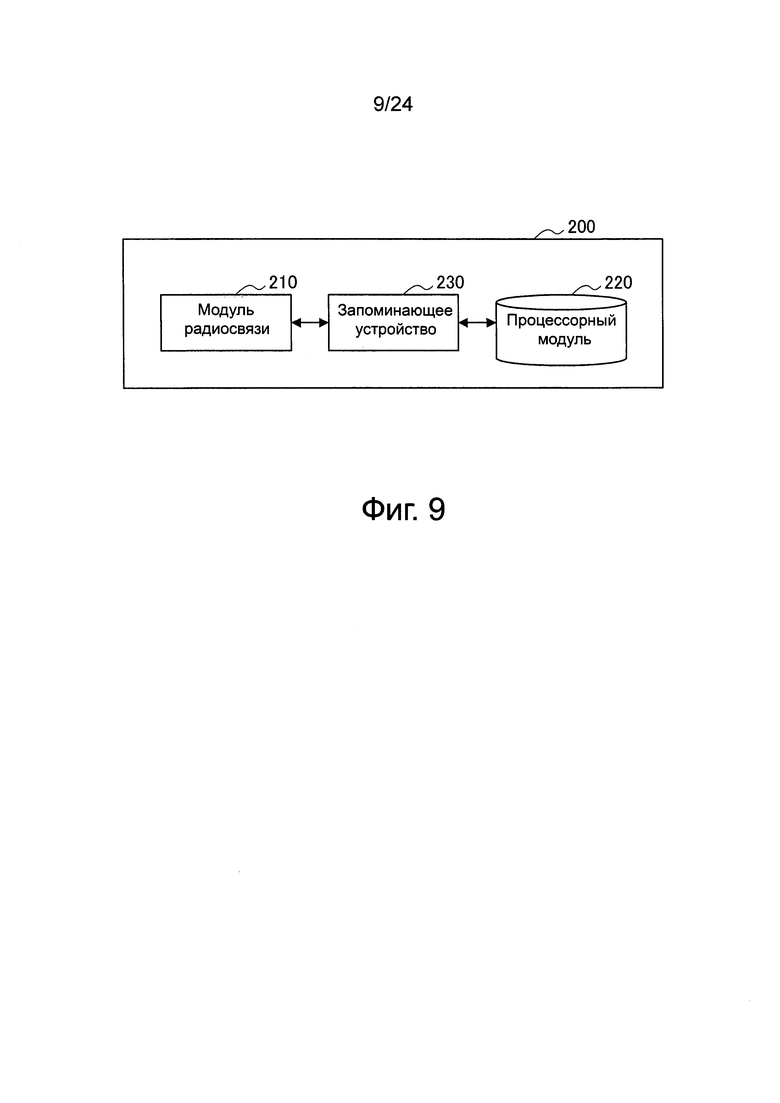
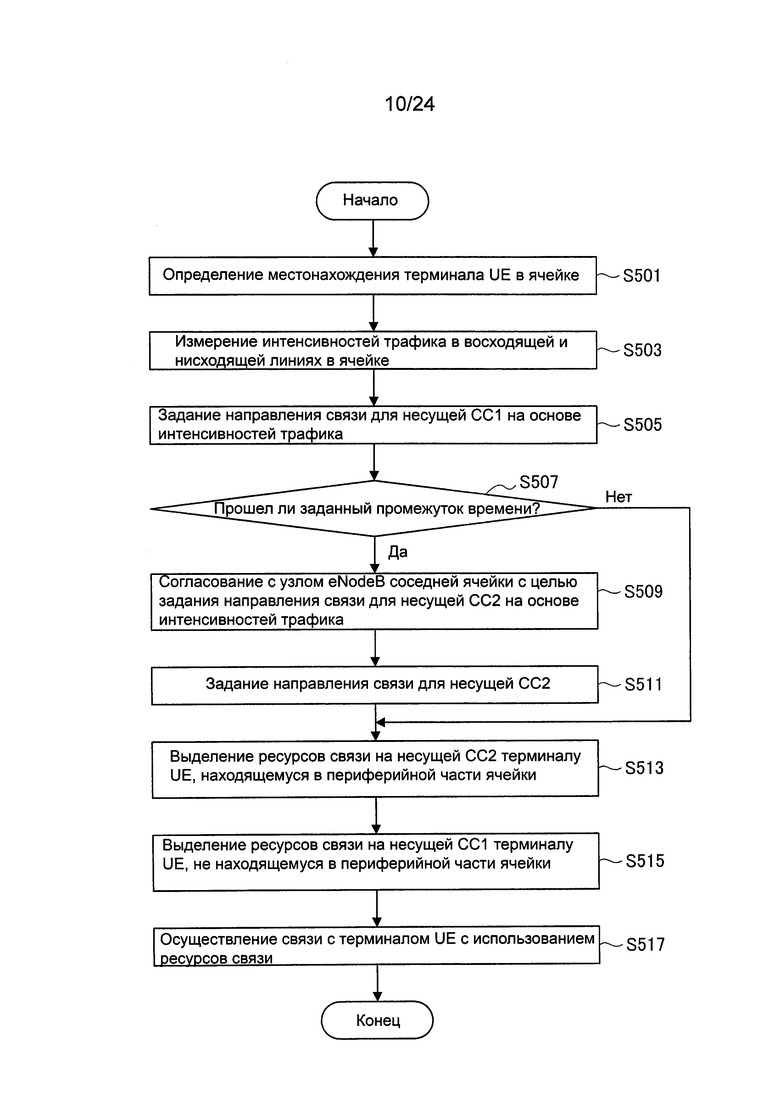
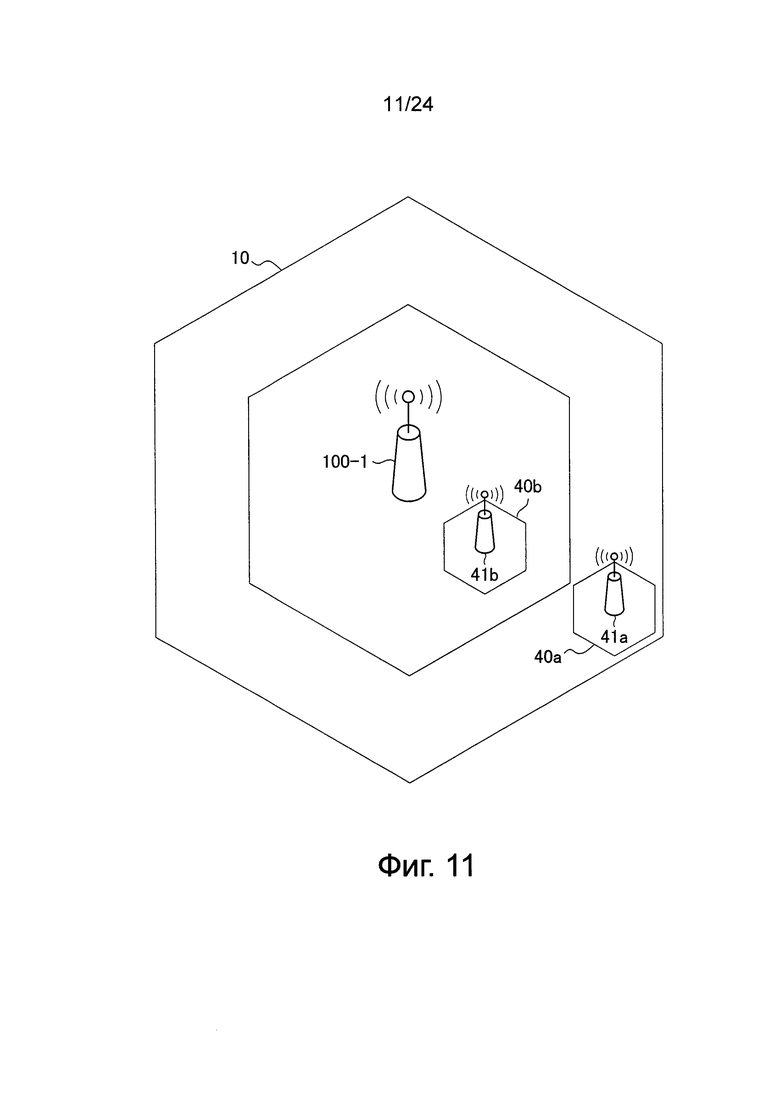
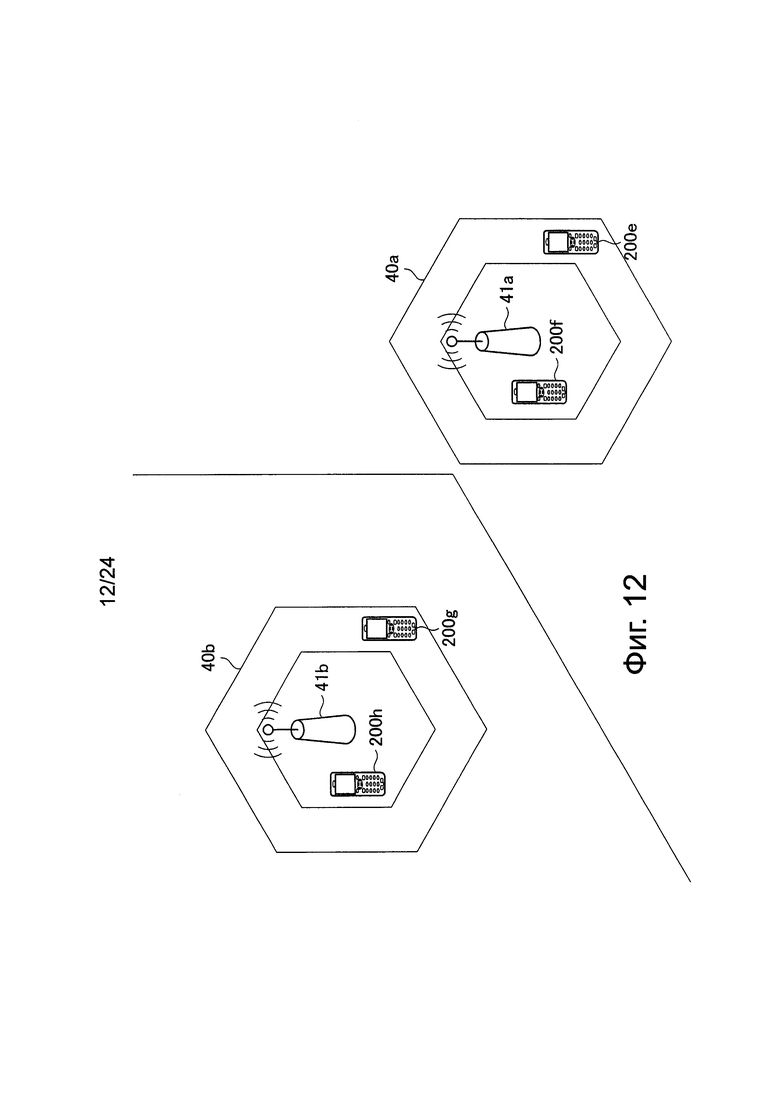
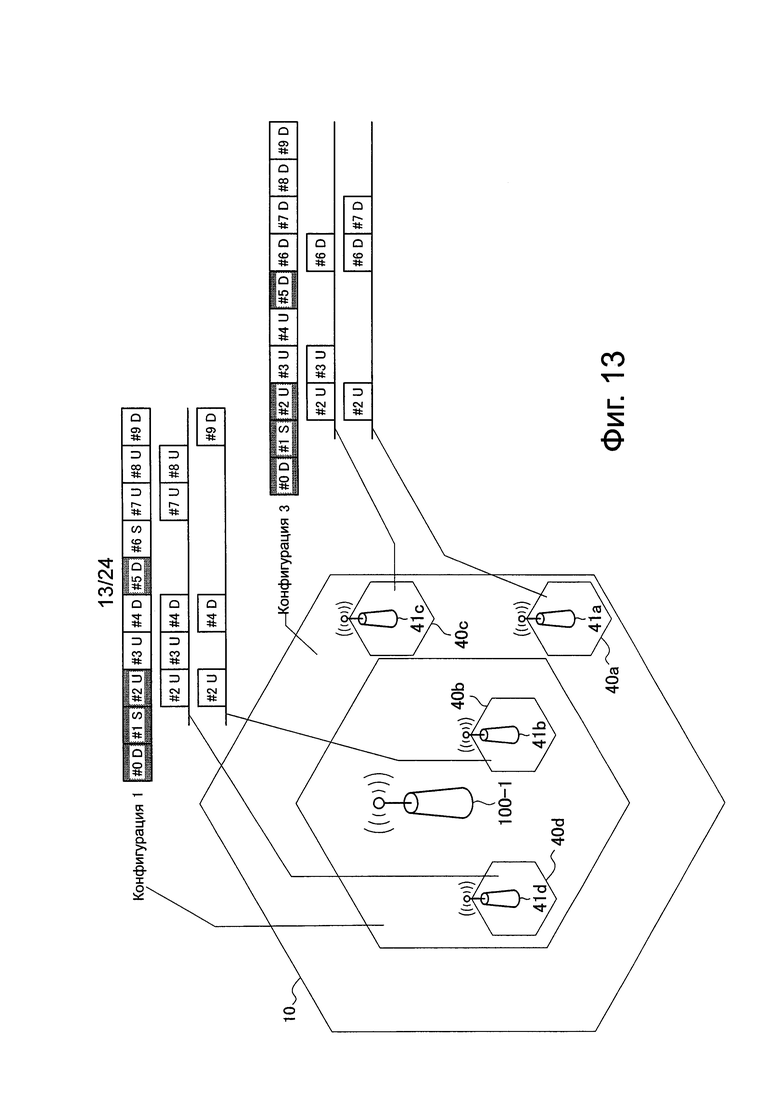
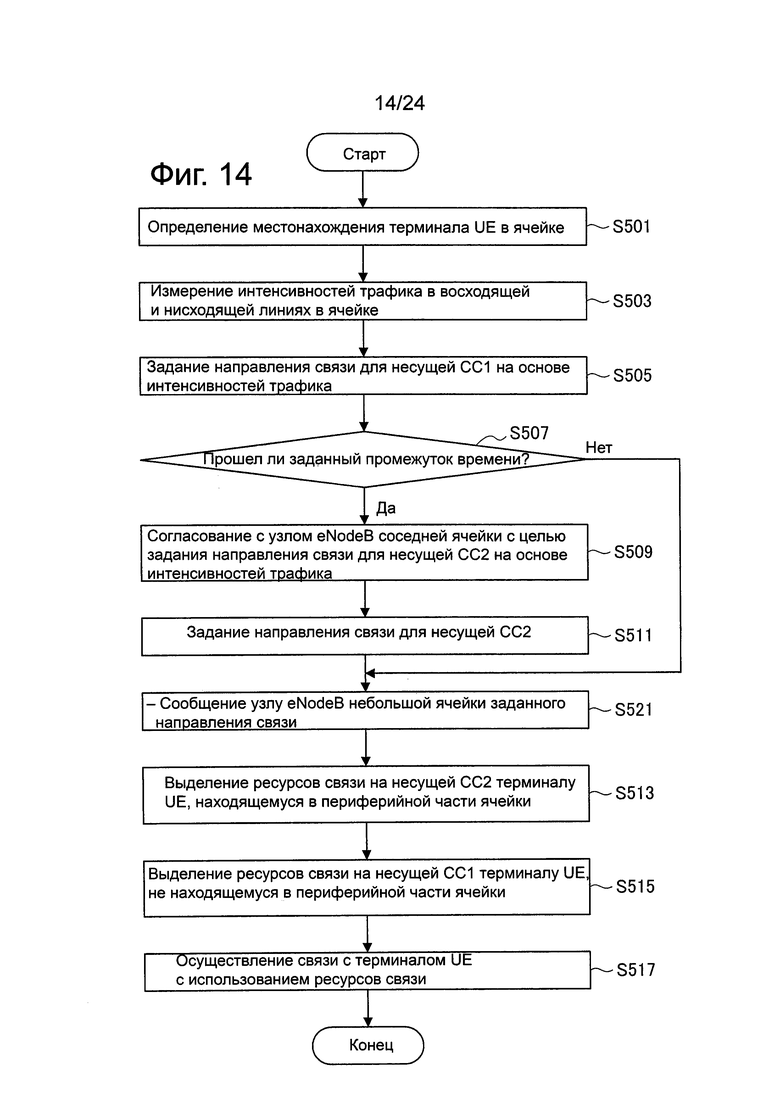
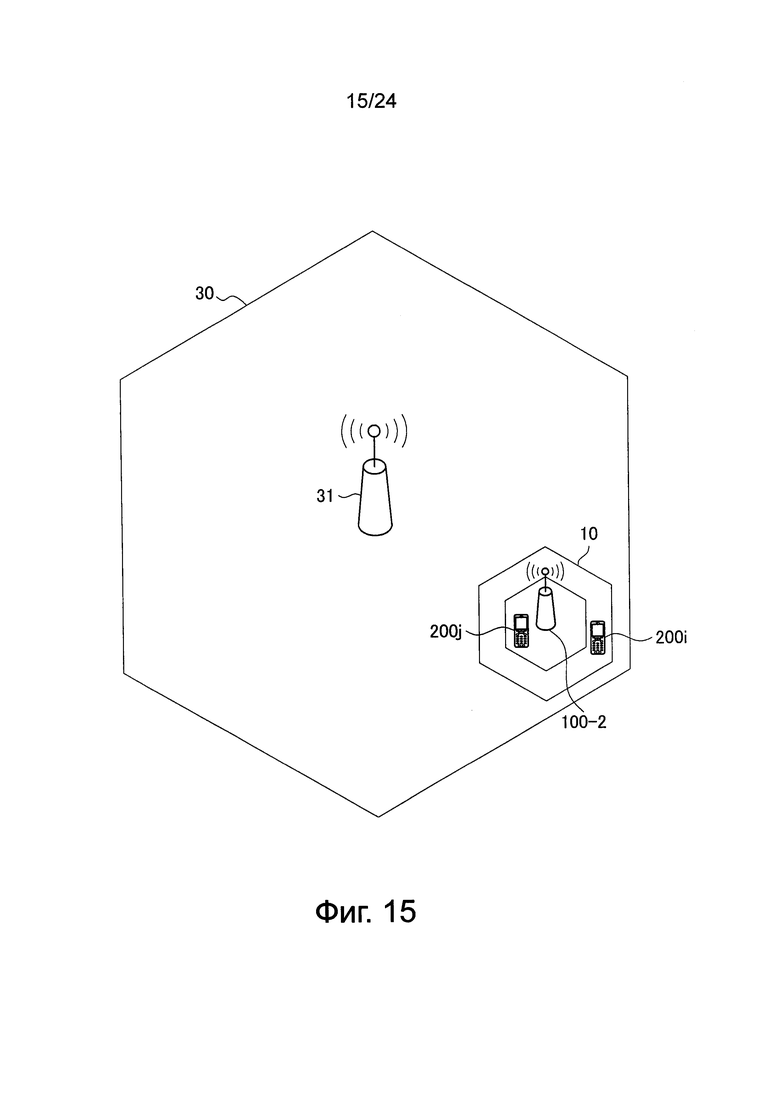
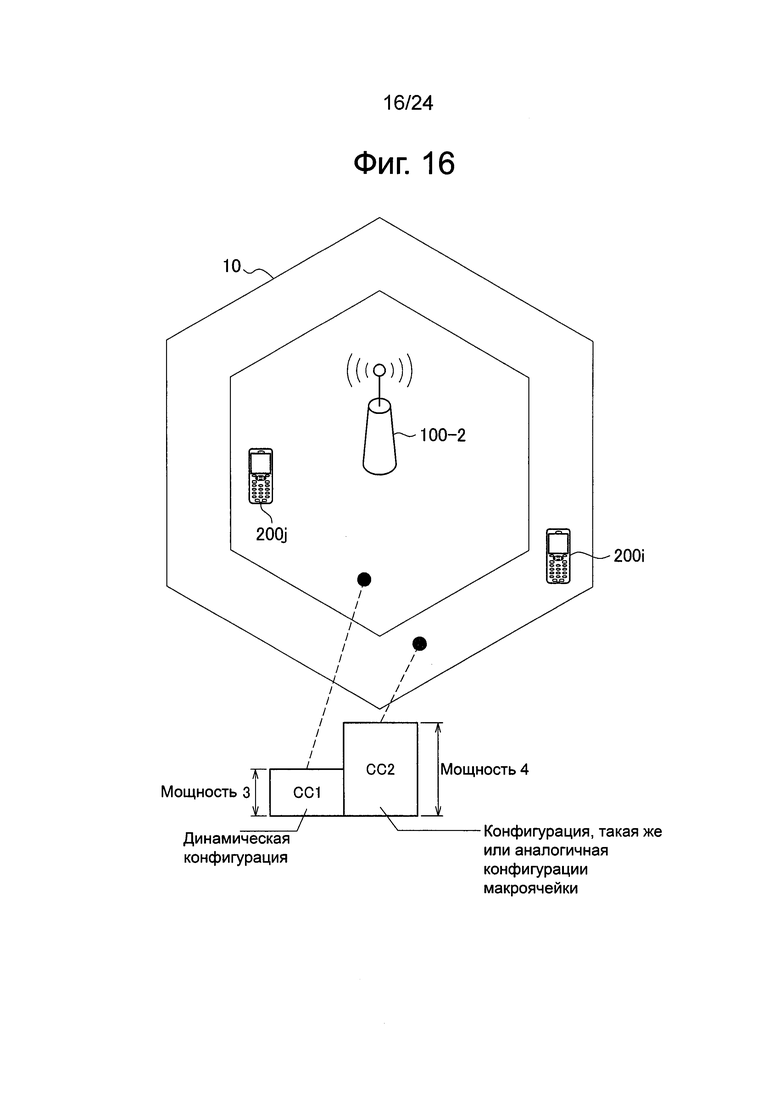
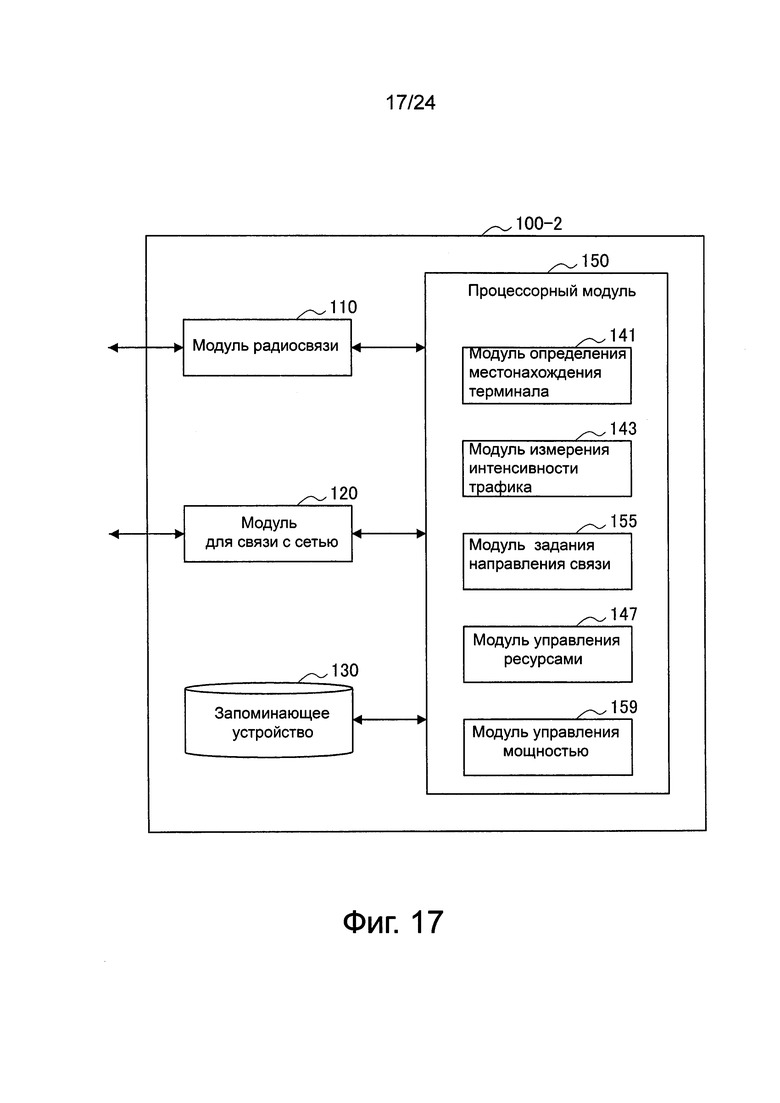
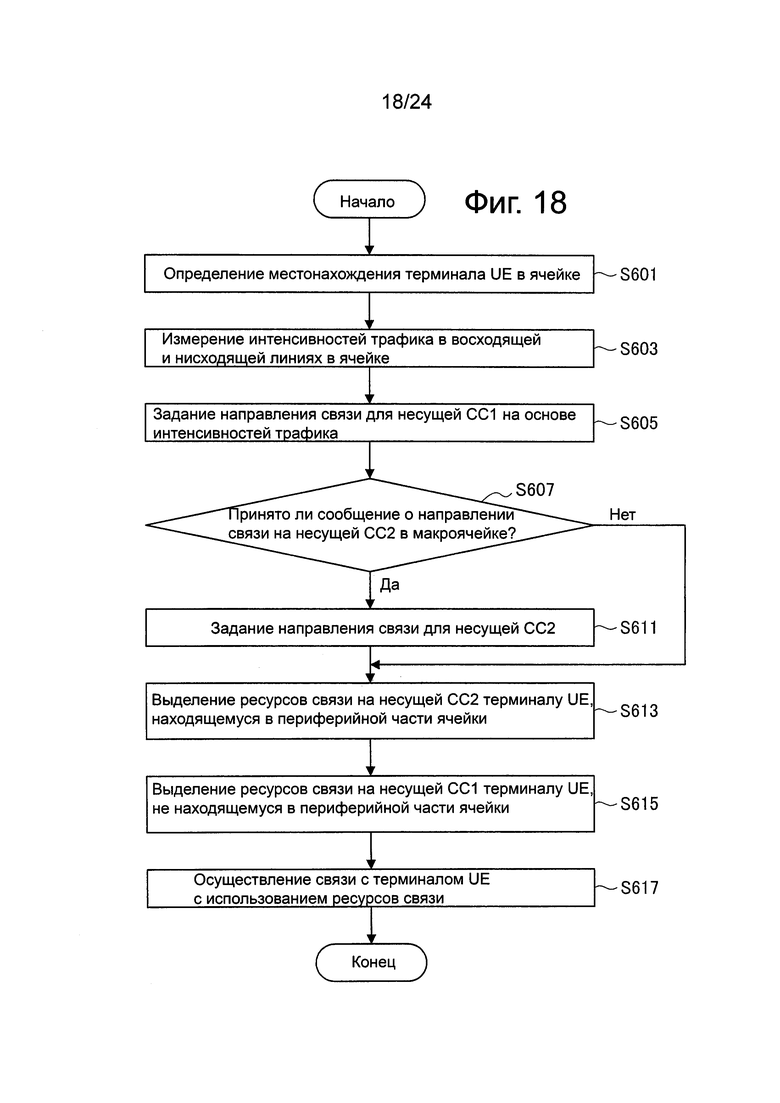
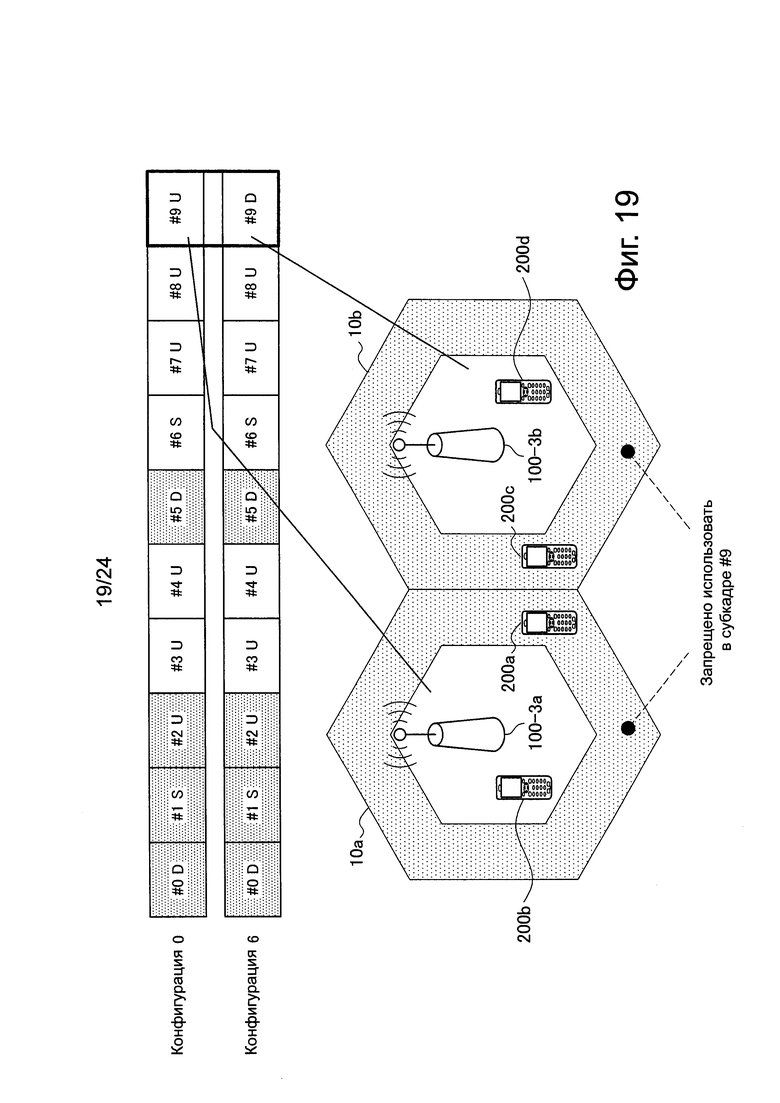
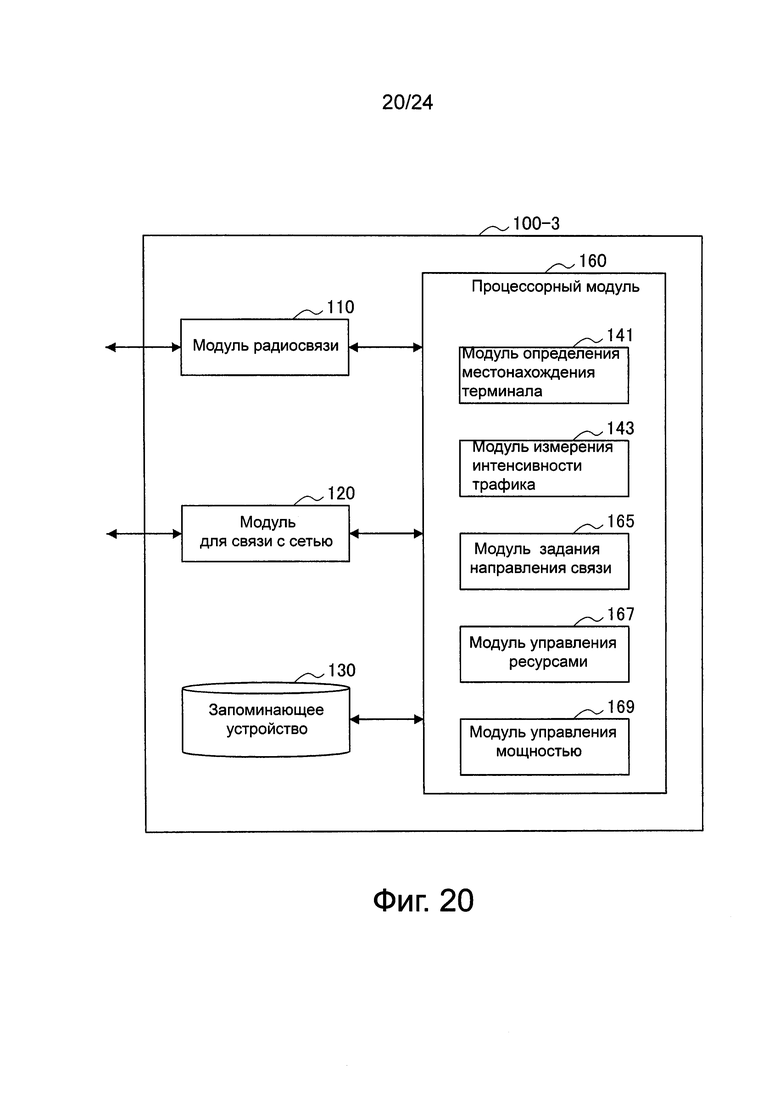
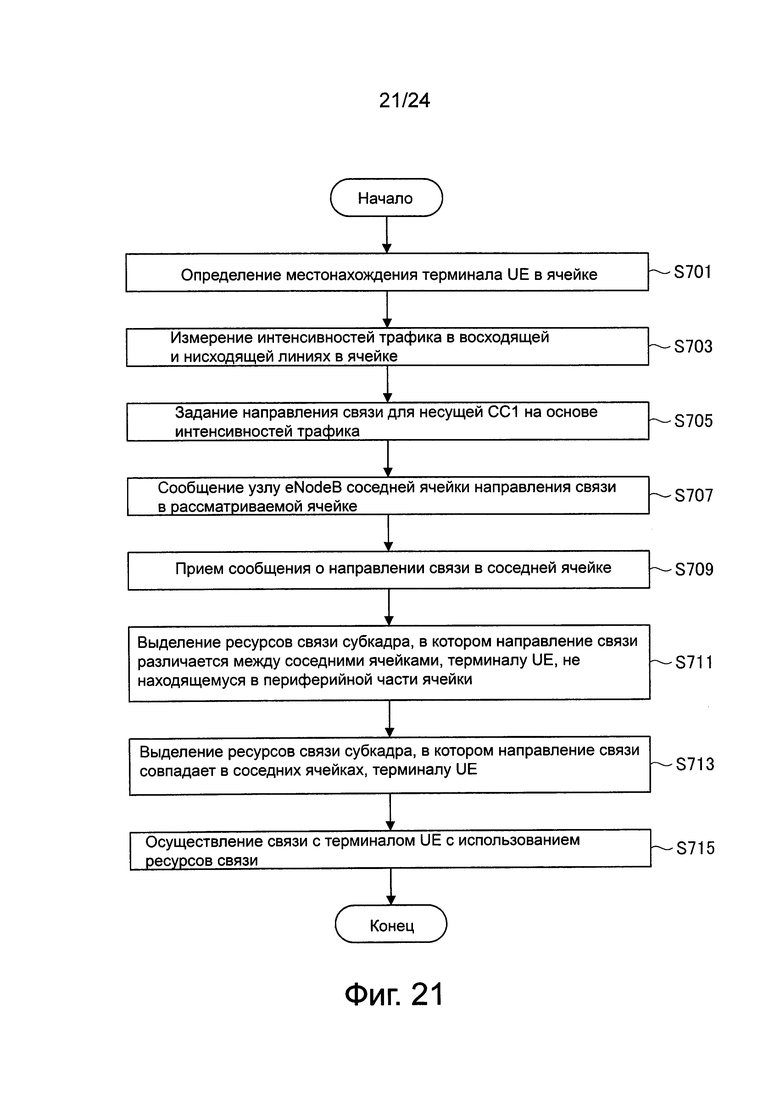
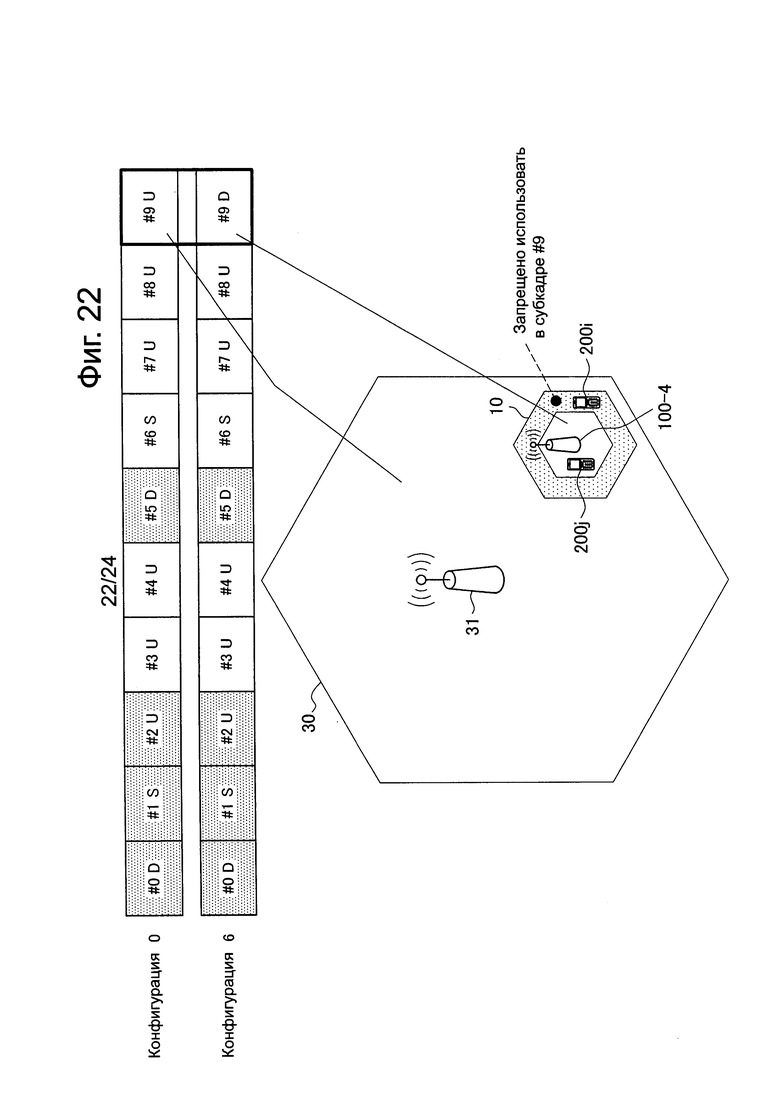
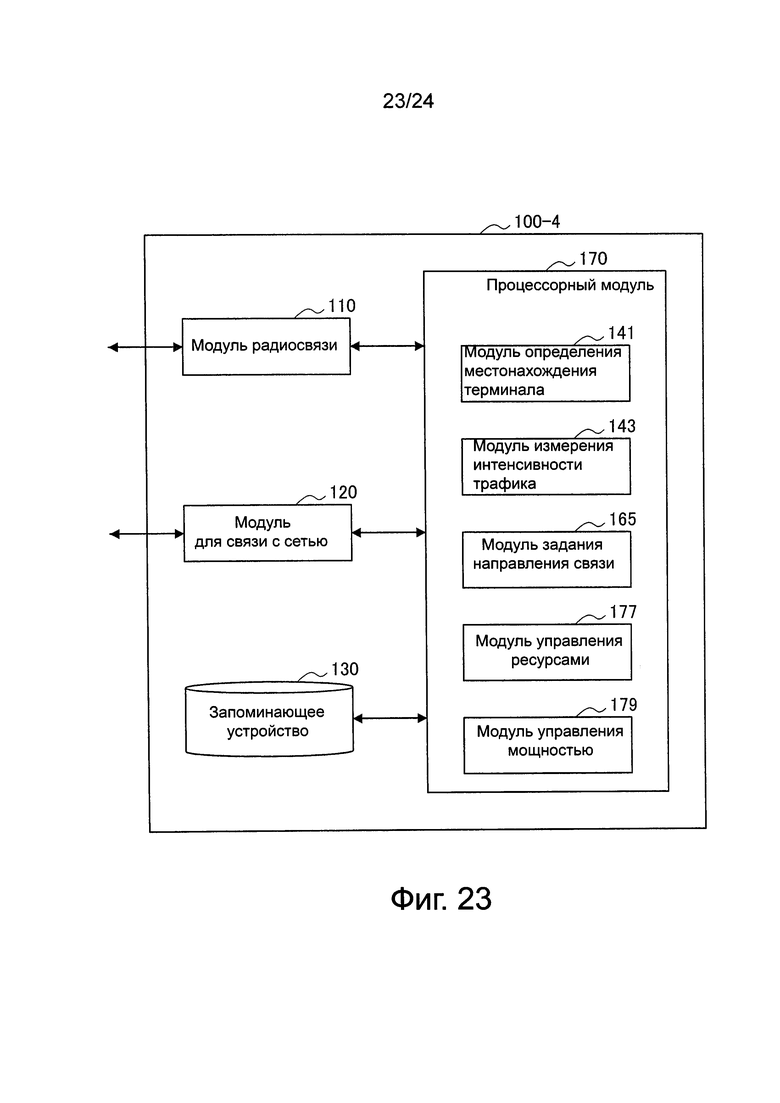
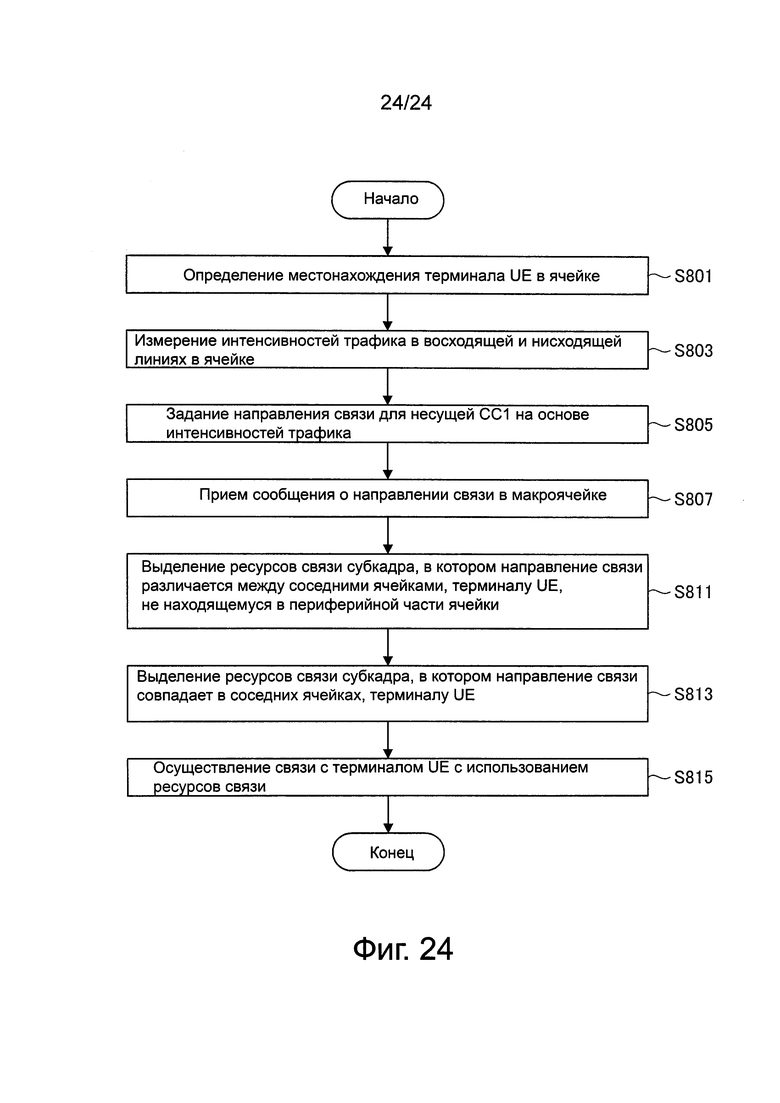
Изобретение относится к системам связи. Технический результат заключается в повышении пропускной способности системы. Предложено устройство управления связью, содержащее модуль радиосвязи, осуществляющий связь с одним или несколькими терминалами в ячейке по каналу связи, в котором направление связи может быть задано динамически для каждого субкадра, представляющего собой единицу времени для радиосвязи, и модуль управления, осуществляющий управление выделением ресурсов связи терминалу на основе задания направления связи в канале связи и местонахождения этого терминала в ячейке. 4 н. и 14 з.п. ф-лы, 24 ил.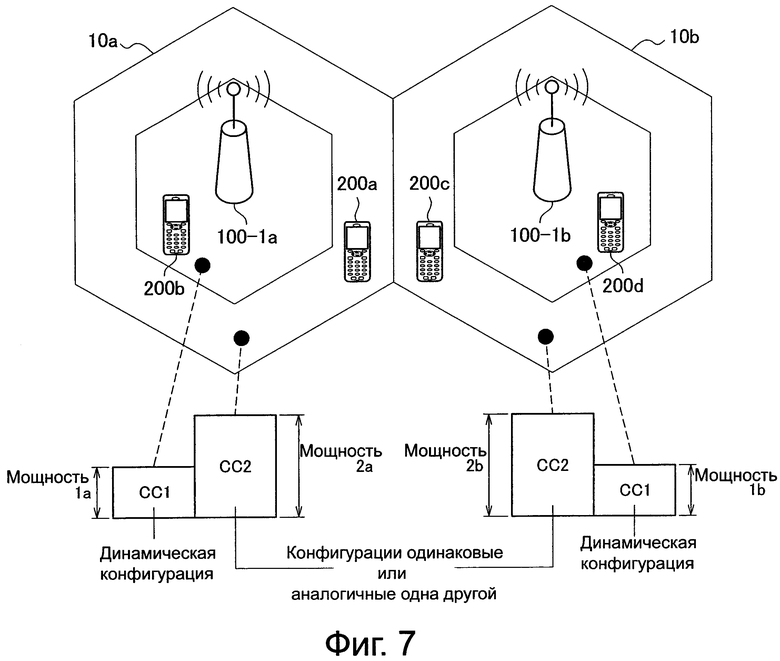
1. Устройство управления связью, содержащее схему, выполненную с возможностью:
осуществления связи с одним или несколькими терминалами в первой ячейке по каналу связи, в котором направление связи может быть динамически изменено для отдельных субкадров, при этом субкадр представляет собой единицу времени для радиосвязи; и
управления мощностью передач отдельных субкадров.
2. Устройство управления связью по п. 1, в котором направление связи для отдельных субкадров может быть изменено на нисходящее направление.
3. Устройство управления связью по п. 2, в котором схема выполнена с возможностью осуществления связи с одним или несколькими терминалами с использованием одного или нескольких вторых субкадров с направлением связи, зафиксированным равным нисходящему направлению.
5. Устройство управления связью по п. 1, в котором схема выполнена с возможностью
управления мощностью передач с целью уменьшения помех сигналов нисходящей и восходящей линий в разных ячейках.
6. Устройство управления связью по п. 1, в котором схема выполнена с возможностью изменения направления связи на основе второго направления связи некоторого субкадра во второй ячейке.
7. Устройство управления связью по п. 6, в котором вторая ячейка расположена рядом с первой ячейкой или перекрывается с ней.
8. Устройство управления связью по п. 1, в котором схема выполнена с возможностью осуществления связи с одним или несколькими терминалами с использованием дуплексного режима с разделением по времени, в котором субкадр представляет собой единицу времени в дуплексном режиме с разделением по времени.
9. Устройство управления связью по п. 1, в котором канал связи содержит по меньшей мере первый частотный диапазон и второй частотный диапазон, и схема выполнена с возможностью такого задания направления связи для отдельных субкадров первого частотного диапазона, чтобы оно было по меньшей мере частично отлично от второго направления связи для отдельных субкадров второго частотного диапазона.
10. Устройство управления связью по п. 9, в котором схема выполнена с возможностью задания второго направления связи с целью уменьшения разности между направлениями связи субкадров упомянутой ячейки и второй ячейки.
11. Устройство управления связью по п. 1, в котором канал связи содержит по меньшей мере первый частотный диапазон и второй частотный диапазон, и схема выполнена с возможностью требовать от узла связи второй ячейки уменьшить мощность передач в некотором субкадре, в котором второе направление связи второй ячейки отличается от направления связи первой ячейки.
12. Устройство управления связью, содержащее схему, выполненную с возможностью:
осуществления связи с одним или несколькими терминалами в первой ячейке по каналу связи, в котором направление связи может быть динамически изменено для отдельных субкадров, при этом субкадр представляет собой единицу времени для радиосвязи; и
управления выделением ресурсов связи терминалу и задания направления связи в канале связи,
при этом канал связи содержит по меньшей мере первый частотный диапазон и второй частотный диапазон, и схема выполнена с возможностью такого задания направления связи для отдельных субкадров первого частотного диапазона, чтобы оно было по меньшей мере частично отлично от направления связи для отдельных субкадров второго частотного диапазона,
при этом первая частота является первой компонентной несущей, и вторая частота является второй используемой компонентной несущей, и первую ячейку и вторую ячейку агрегируют для осуществления связи с одним или несколькими терминалами, и отличаются TDD конфигурации первого частотного диапазона и второго частотного диапазона.
13. Устройство управления связью по п. 12, в котором схема выполнена с возможностью задания направления связи для отдельных субкадров второго частотного диапазона с целью уменьшения разности между направлениями связи субкадров упомянутой ячейки и второй ячейки.
14. Устройство управления связью по п. 13, в котором вторая ячейка расположена рядом с первой ячейкой или перекрывается с ней.
15. Устройство управления связью по п. 12, в котором схема выполнена с возможностью требовать от узла связи второй ячейки уменьшить мощность передач в субкадре, в котором второе направление связи второй ячейки отличается от первого направления связи первой ячейки.
16. Устройство управления связью по п. 12, в котором схема выполнена с возможностью такого управления мощностью передач, чтобы она отличалась в субкадрах разных типов.
17. Способ управления связью, содержащий:
осуществляют связь с одним или несколькими терминалами в первой ячейке по каналу связи, в котором направление связи может быть динамически изменено для отдельных субкадров, при этом субкадр представляет собой единицу времени для радиосвязи; и
управляют мощностью передач отдельных субкадров.
18. Способ управления связью, содержащий следующее:
осуществляют связь с одним или несколькими терминалами в первой ячейке по каналу связи, в котором направление связи может быть динамически изменено для отдельных субкадров, при этом субкадр представляет собой единицу времени для радиосвязи; и
управляют выделением ресурсов связи терминалу и задают направление связи в канале связи,
при этом канал связи содержит по меньшей мере первый частотный диапазон и второй частотный диапазон, и способ дополнительно содержит следующее: так задают направление связи для отдельных субкадров первого частотного диапазона, чтобы оно отличалось от направления связи для отдельных субкадров второго частотного диапазона,
при этом первая частота является первой компонентной несущей, и вторая частота является второй используемой компонентной несущей, и первую ячейку и вторую ячейку агрегируют для осуществления связи с одним или несколькими терминалами, и отличаются TDD конфигурации первого частотного диапазона и второго частотного диапазона.
| US 2009093219 A1, 09.04.2009 | |||
| US 2011177834 A1, 21.07.2011 | |||
| WO 2007082141 A2, 19.07.2007 | |||
| УСТРОЙСТВО И СПОСОБ РАСПРЕДЕЛЕНИЯ НЕСУЩИХ И УПРАВЛЕНИЯ ИМИ В СИСТЕМАХ СВЯЗИ С НЕСКОЛЬКИМИ НЕСУЩИМИ | 2006 |
|
RU2388163C2 |
| ВЫБОР РЕСУРСОВ РАДИОСВЯЗИ В СЕТИ РАДИОСВЯЗИ | 2005 |
|
RU2395177C2 |

