Предпосылки создания изобретения
За многие годы были разработаны разнообразные минимально инвазивные роботизированные (или «дистанционные хирургические») системы для повышения манипуляционных возможностей при хирургии, а также для того чтобы хирург мог работать с пациентом интуитивно понятным способом. Многие такие системы описаны в следующих патентах США, каждый из которых полностью включен в настоящий документ путем ссылки: патент США № 5,792,135, озаглавленный «Шарнирно повернутый хирургический инструмент для выполнения минимально инвазивных хирургических операций с повышенными манипуляционными возможностями и чувствительностью», патент США № 6,231,565, озаглавленный «Роботизированный манипулятор DLUS для выполнения хирургических задач», патент США № 6,783,524, озаглавленный «Роботизированный хирургический инструмент с прибором для ультразвукового прижигания и резки», патент США № 6,364,888, озаглавленный «Выравнивание главной и ведомой части в минимально инвазивном хирургическом устройстве», патент США № 7,524,320, озаглавленный «Система взаимодействия механического активатора для роботизированных хирургических инструментов», патент США № 7,691,098, озаглавленный «Запястный механизм для присоединения к платформе», патент США № 7,806,891, озаглавленный «Повторная установка и переориентация отношения типа главный/ведомый при минимально инвазивной дистанционной хирургии», и патент США № 7,824,401, озаглавленный «Хирургический инструмент с запястными монополярными электрохирургическими концевыми эффекторами». Однако многие такие системы ранее были неспособны развивать диапазон усилий, необходимых для эффективного разрезания и сшивания ткани. Кроме того, существующие роботизированные хирургические системы ограничены по числу разных типов хирургических устройств, с которыми они могут работать.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Элементы и преимущества настоящего изобретения, а также способ их достижения станут более очевидны, а само настоящее изобретение станет более понятным путем ссылки на следующее описание примеров осуществления настоящего изобретения в совокупности с сопроводительными чертежами.
Различные примеры осуществления описаны в настоящем документе с помощью примеров в совокупности со следующими фигурами, причем:
на ФИГ. 1 представлен вид в перспективе одного варианта осуществления роботизированного контроллера;
на ФИГ. 2 представлен вид в перспективе одного штатива хирургической руки-манипулятора/манипулятора роботизированной системы, функционально поддерживающей множество вариантов осуществления хирургического инструмента;
на ФИГ. 3 представлен вид сбоку роботизированного штатива хирургической руки-манипулятора/манипулятора, показанного на ФИГ. 2;
на ФИГ. 4 представлен вид в перспективе структуры штатива с позиционирующими рычажными механизмами для функциональной поддержки роботизированных манипуляторов, которые можно использовать с вариантами осуществления хирургического инструмента;
на ФИГ. 5 представлен вид в перспективе варианта осуществления хирургического инструмента и варианта осуществления хирургического концевого эффектора;
на ФИГ. 6 представлен общий вид с пространственным разделением компонентов конфигурации адаптера и держателя инструмента для прикрепления различных вариантов осуществления хирургического инструмента к роботизированной системе;
на ФИГ. 7 представлен вид сбоку адаптера, показанного на ФИГ. 6;
на ФИГ. 8 представлен вид снизу адаптера, показанного на ФИГ. 6;
на ФИГ. 9 представлен вид сверху адаптера, показанного на ФИГ. 6 и 7;
на ФИГ. 10 представлен частичный вид снизу в перспективе варианта осуществления хирургического инструмента;
на ФИГ. 11 представлен вид спереди в перспективе части варианта осуществления хирургического инструмента, причем некоторые элементы для ясности не показаны;
на ФИГ. 12 представлен вид сзади в перспективе варианта осуществления хирургического инструмента, показанного на ФИГ. 11;
на ФИГ. 13 представлен вид сверху варианта осуществления хирургического инструмента, показанного на ФИГ. 11 и 12;
на ФИГ. 14 представлен частичный вид сверху варианта осуществления хирургического инструмента, показанного на ФИГ. 11-13, причем активируемая вручную приводная шестерня находится в неактивированном положении;
на ФИГ. 15 представлен другой частичный вид сверху варианта осуществления хирургического инструмента, показанного на ФИГ. 11-14, причем активируемая вручную приводная шестерня находится в исходно активированном положении;
на ФИГ. 16 представлен другой частичный вид сверху варианта осуществления хирургического инструмента, показанного на ФИГ. 11-15, причем активируемая вручную приводная шестерня находится в активированном положении;
на ФИГ. 17 представлен вид сзади в перспективе другого варианта осуществления хирургического инструмента;
на ФИГ. 18 представлен вид сбоку в вертикальной проекции варианта осуществления хирургического инструмента, показанного на ФИГ. 17;
на ФИГ. 19 представлен вид в поперечном сечении варианта осуществления хирургического инструмента, показанного на ФИГ. 5, с концевым эффектором, отсоединенным от проксимальной части стержня хирургического инструмента;
на ФИГ. 20 представлен вид сбоку в перспективе части варианта осуществления сцепленного соединения с возможностью быстрой разборки;
на ФИГ. 21 представлен вид в поперечном сечении варианта осуществления соединения с возможностью быстрой разборки с дистальной частью стержня концевого эффектора, отсоединенной от проксимальной части стержня;
на ФИГ. 22 представлен другой вид в поперечном сечении варианта осуществления соединения с возможностью быстрой разборки, показанного на ФИГ. 19-21, в котором дистальная часть стержня исходно зацеплена с проксимальной частью стержня;
на ФИГ. 22А представлен другой вид в поперечном сечении варианта осуществления соединения с возможностью быстрой разборки, в котором дистальная часть стержня исходно зацеплена с проксимальной частью стержня;
на ФИГ. 23 представлен другой вид в поперечном сечении варианта осуществления соединения с возможностью быстрой разборки, показанного на ФИГ. 19-22, в котором дистальная часть стержня прикреплена к проксимальной части стержня;
на ФИГ. 23А представлен другой вид в поперечном сечении варианта осуществления соединения с возможностью быстрой разборки, показанного на ФИГ. 22A, в котором дистальная часть стержня прикреплена к проксимальной части стержня;
на ФИГ. 23В представлен другой вид в поперечном сечении варианта осуществления соединения с возможностью быстрой разборки, показанного на ФИГ. 22А, 22В, в котором дистальная часть стержня расцеплена с проксимальной частью стержня;
на ФИГ. 24 представлен вид в поперечном сечении дистальной части стержня, показанного на ФИГ. 19-23, вдоль линии 24-24, показанной на ФИГ. 21;
на ФИГ. 25 представлен вид в поперечном сечении варианта осуществления части шарнирного сочленения и концевого эффектора;
на ФИГ. 26 представлен общий вид с пространственным разделением компонентов части шарнирного сочленения и концевого эффектора, показанных на ФИГ. 25;
на ФИГ. 27 представлен частичный вид в поперечном сечении в перспективе частей шарнирного сочленения и концевого эффектора, показанных на ФИГ. 26;
на ФИГ. 28 представлен частичный вид в перспективе варианта осуществления концевого эффектора и узла приводного стержня;
на ФИГ. 29 представлен частичный вид сбоку варианта осуществления узла приводного стержня;
на ФИГ. 30 представлен вид в перспективе варианта осуществления узла приводного стержня;
на ФИГ. 31 представлен вид сбоку узла приводного стержня, показанного на ФИГ. 31;
на ФИГ. 32 представлен вид в перспективе варианта осуществления композитного узла приводного стержня;
на ФИГ. 33 представлен вид сбоку композитного узла приводного стержня, показанного на ФИГ. 33;
на ФИГ. 34 представлен другой вид узла приводного стержня, показанного на ФИГ. 30 и 31, предполагающего дугообразную или «изогнутую» конфигурацию;
на ФИГ. 34A представлен вид сбоку варианта осуществления узла приводного стержня, предполагающего дугообразную или «изогнутую» конфигурацию;
на ФИГ. 34B представлен вид сбоку другого варианта осуществления узла приводного стержня, предполагающего дугообразную или «изогнутую» конфигурацию;
на ФИГ. 35 представлен вид в перспективе части другого варианта осуществления узла приводного стержня;
на ФИГ. 36 представлен вид сверху варианта осуществления узла приводного стержня, показанного на ФИГ. 35;
на ФИГ. 37 представлен другой вид в перспективе варианта осуществления узла приводного стержня, показанного на ФИГ. 35 и 36, в дугообразной конфигурации;
на ФИГ. 38 представлен вид сверху варианта осуществления узла приводного стержня, показанного на ФИГ. 37;
на ФИГ. 39 представлен вид в перспективе другого варианта осуществления узла приводного стержня;
на ФИГ. 40 представлен другой вид в перспективе варианта осуществления узла приводного стержня, показанного на ФИГ. 39, в дугообразной конфигурации;
на ФИГ. 41 представлен вид сверху варианта осуществления узла приводного стержня, показанного на ФИГ. 39 и 40;
на ФИГ. 42 представлен вид в поперечном сечении варианта осуществления узла приводного стержня, показанного на ФИГ. 41;
на ФИГ. 43 представлен частичный вид в поперечном сечении другого варианта осуществления узла приводного стержня;
на ФИГ. 44 представлен другой вид в поперечном сечении варианта осуществления узла приводного стержня, показанного на ФИГ. 43;
на ФИГ. 45 представлен другой вид в поперечном сечении части другого варианта осуществления узла приводного стержня;
на ФИГ. 46 представлен другой вид в поперечном сечении узла приводного стержня, показанного на ФИГ. 45;
на ФИГ. 47 представлен частичный вид в поперечном сечении в перспективе варианта осуществления концевого эффектора, на котором упор находится в открытом положении;
на ФИГ. 48 представлен другой частичный вид в поперечном сечении в перспективе варианта осуществления концевого эффектора, показанного на ФИГ. 47;
на ФИГ. 49 представлен вид сбоку в поперечном сечении варианта осуществления концевого эффектора, изображенного на ФИГ. 47 и 48;
на ФИГ. 50 представлен другой вид в поперечном сечении концевого эффектора, показанного на ФИГ. 47-49;
на ФИГ. 51 представлен частичный вид в поперечном сечении в перспективе варианта осуществления концевого эффектора, показанного на ФИГ. 47-50, на котором упор находится в закрытом положении;
на ФИГ. 52 представлен другой частичный вид в поперечном сечении в перспективе варианта осуществления концевого эффектора, показанного на ФИГ. 51;
на ФИГ. 53 представлен вид сбоку в поперечном сечении варианта осуществления концевого эффектора, показанного на ФИГ. 51-52, на котором упор находится в частично закрытом положении;
на ФИГ. 54 представлен другой вид в поперечном сечении варианта осуществления концевого эффектора, показанного на ФИГ. 51-53, на котором упор находится в закрытом положении;
на ФИГ. 55 представлен вид в перспективе в поперечном сечении другого варианта осуществления концевого эффектора и части другого варианта осуществления узла удлиненного стержня;
на ФИГ. 56 представлен вид с пространственным разделением компонентов в перспективе варианта осуществления закрывающей системы;
на ФИГ. 57 представлен вид сбоку варианта осуществления закрывающей системы, показанной на ФИГ. 56, на котором упор находится в открытом положении;
на ФИГ. 58 представлен вид сбоку в поперечном сечении варианта осуществления закрывающей системы, показанной на ФИГ. 57 и 57, внутри варианта осуществления концевого эффектора, причем упор находится в открытом положении;
на ФИГ. 59 представлен другой вид в поперечном сечении закрывающей системы и варианта осуществления концевого эффектора, показанного на ФИГ. 58, на котором его упор находится в закрытом положении;
на ФИГ. 59A представлен вид спереди в перспективе части другого варианта осуществления хирургического инструмента, в котором используется вариант осуществления закрывающей системы, показанной на ФИГ. 56-59, причем активирующий соленоид опущен для ясности;
на ФИГ. 60 представлен общий вид с пространственным разделением компонентов другого варианта осуществления концевого эффектора;
на ФИГ. 61 представлен частичный вид в перспективе варианта осуществления приводной системы;
на ФИГ. 62 представлен частичный вид спереди в перспективе части варианта осуществления приводной системы, показанной на ФИГ. 61;
на ФИГ. 63 представлен частичный вид сзади в перспективе части варианта осуществления приводной системы, показанной на ФИГ. 61 и 62;
на ФИГ. 64 представлен частичный вид сбоку в поперечном сечении варианта осуществления приводной системы, показанной на ФИГ. 61-63, в первом осевом положении привода;
на ФИГ. 65 представлен другой частичный вид сбоку в поперечном сечении варианта осуществления приводной системы, показанной на ФИГ. 61-64, во втором осевом положении привода;
на ФИГ. 66 представлен вид в поперечном сечении варианта осуществления концевого эффектора и приводной системы, в котором приводная система выполнена с возможностью активации пускового элемента;
на ФИГ. 67 представлен другой вид в поперечном сечении варианта осуществления концевого эффектора и приводной системы, в котором приводная система выполнена с возможностью поворота всего концевого эффектора;
на ФИГ. 68 представлен вид в поперечном сечении в перспективе части варианта осуществления концевого эффектора и варианта осуществления шарнирного сочленения;
на ФИГ. 69 представлен вид сбоку в поперечном сечении концевого эффектора и варианта осуществления шарнирного сочленения, показанного на ФИГ. 68;
на ФИГ. 70 представлен вид в поперечном сечении другого варианта осуществления концевого эффектора и приводной системы, в котором приводная система выполнена с возможностью поворота всего концевого эффектора;
на ФИГ. 71 представлен еще один вид в поперечном сечении варианта осуществления концевого эффектора и приводной системы с ФИГ. 70, в котором приводная система выполнена с возможностью активации пускового элемента концевого эффектора;
на ФИГ. 72 представлен вид сбоку в поперечном сечении варианта осуществления концевого эффектора;
на ФИГ. 73 представлен увеличенный вид в поперечном сечении части варианта осуществления концевого эффектора, показанного на ФИГ. 72;
на ФИГ. 74 представлен вид сбоку в поперечном сечении другого варианта осуществления концевого эффектора, в котором пусковой элемент частично приведен в движение в течение пускового такта;
на ФИГ. 75 представлен другой вид сбоку в поперечном сечении варианта осуществления концевого эффектора, показанного на ФИГ. 74, в котором пусковой элемент приведен в движение в конец его пускового такта;
на ФИГ. 76 представлен другой вид сбоку в поперечном сечении варианта осуществления концевого эффектора, показанного на ФИГ. 74 и 75, на котором его пусковой элемент оттягивается;
на ФИГ. 77 представлен вид сбоку в поперечном сечении другого варианта осуществления концевого эффектора, в котором пусковой элемент частично приведен в движение в течение пускового такта;
на ФИГ. 78 представлен общий вид с пространственным разделением компонентов части варианта осуществления приводного стержня инструмента;
на ФИГ. 79 представлен другой вид сбоку в поперечном сечении концевого эффектора, показанного на ФИГ. 77, причем его пусковой элемент находится в конце своего пускового такта;
на ФИГ. 80 представлен другой вид в поперечном сечении концевого эффектора, показанного на ФИГ. 77 и 78, на котором пусковой элемент оттягивается;
на ФИГ. 81 представлен вид сбоку в поперечном сечении другого варианта осуществления концевого эффектора, на котором пусковой элемент находится в конце своего пускового такта;
на ФИГ. 81A представлен общий вид с пространственным разделением компонентов варианта осуществления приводного стержня инструмента и сегмента подшипника;
на ФИГ. 81B представлен общий вид с пространственным разделением компонентов другого варианта осуществления приводного стержня инструмента и сегмента подшипника;
на ФИГ. 82 представлен общий вид с пространственным разделением компонентов варианта осуществления пускового элемента;
на ФИГ. 83 представлен вид в перспективе пускового элемента, показанного на ФИГ. 82;
на ФИГ. 84 представлен вид в поперечном сечении пускового элемента, показанного на ФИГ. 82 и 83, установленного на часть примера осуществления приводного стержня инструмента;
на ФИГ. 85 представлен общий вид с пространственным разделением компонентов другого варианта осуществления пускового элемента;
на ФИГ. 86 представлен вид сзади в перспективе другого варианта осуществления пускового элемента;
на ФИГ. 87 представлен вид спереди в перспективе варианта осуществления пускового элемента, показанного на ФИГ. 86;
на ФИГ. 88 представлен вид в перспективе пускового элемента, приводного стержня инструмента, узла клиновидных салазок и выравнивающей части для хирургического концевого эффектора;
на ФИГ. 89 представлен вид сбоку в вертикальной проекции пускового элемента, приводного стержня инструмента, узла клиновидных салазок и выравнивающей части, показанных на ФИГ. 88;
на ФИГ. 90 представлен вид в поперечном сечении в вертикальной проекции хирургического концевого эффектора, показанного на ФИГ. 60, в закрытой конфигурации без установленной в нем кассеты со скобами;
на ФИГ. 91 представлен вид снизу хирургического концевого эффектора, имеющего пусковую блокировку в соответствии с различными примерами осуществления настоящего описания;
на ФИГ. 92 представлен частичный вид в перспективе нижней части хирургического концевого эффектора, показанного на ФИГ. 91, в закрытой и нефункциональной конфигурации;
на ФИГ. 93 представлен вид в поперечном сечении в вертикальной проекции хирургического концевого эффектора, показанного на ФИГ. 91, в закрытой и нефункциональной конфигурации;
на ФИГ. 94 представлен вид с торца в вертикальной проекции хирургического концевого эффектора, показанного на ФИГ. 91, в открытой и нефункциональной конфигурации;
на ФИГ. 95 представлен вид с торца в вертикальной проекции хирургического концевого эффектора, показанного на ФИГ. 91, в закрытой и нефункциональной конфигурации;
на ФИГ. 96 представлен вид в поперечном сечении в вертикальной проекции хирургического концевого эффектора, показанного на ФИГ. 91, в закрытой и функциональной конфигурации, в котором узел клиновидных салазок и выравнивающая часть находятся в ней в первом наборе положений;
на ФИГ. 97 представлен вид с торца в вертикальной проекции хирургического концевого эффектора, показанного на ФИГ. 91, в закрытой и функциональной конфигурации;
на ФИГ. 98 представлен вид в перспективе с пространственным разделением компонентов хирургического концевого эффектора, на котором некоторые компоненты показаны в поперечном сечении, а другие компоненты опущены для ясности;
на ФИГ. 99 представлен вид в перспективе смещающего элемента, показанного на ФИГ. 98;
на ФИГ. 100 представлен вид в перспективе корпуса привода концевого эффектора, показанного на ФИГ. 98;
на ФИГ. 101 представлен вид в поперечном сечении в вертикальной проекции хирургического концевого эффектора, показанного на ФИГ. 98, на котором показан смещающий элемент во втором наборе положений;
на ФИГ. 102 представлен вид в поперечном сечении части хирургического концевого эффектора, показанного на ФИГ. 98, на котором показан приводной стержень инструмента в нефункциональном положении;
на ФИГ. 103 представлен вид в поперечном сечении части хирургического концевого эффектора, показанного на ФИГ. 98, на котором показан смещающий элемент в первом наборе положений;
на ФИГ. 104 представлен вид в поперечном сечении хирургического концевого эффектора, показанного на ФИГ. 98, на котором показан смещающий элемент в первом наборе положений и приводной стержень инструмента в функциональном положении;
на ФИГ. 105 представлен вид в поперечном сечении в перспективе концевого эффектора хирургического инструмента, содержащего приводной винт, выполненный с возможностью продвижения пускового элемента концевого эффектора;
на ФИГ. 106A представлен вид сбоку части первого приводного винта для хирургического эффектора, имеющего первую длину, причем первый приводной винт включает однозаходную резьбу;
на ФИГ. 106B представлен вид с торца в поперечном сечении первого приводного винта, показанного на ФИГ. 106A;
на ФИГ. 107A представлен вид сбоку части второго приводного винта для хирургического эффектора, имеющего вторую длину, причем второй приводной винт включает двухзаходную резьбу;
на ФИГ. 107B представлен вид с торца в поперечном сечении второго приводного винта, показанного на ФИГ. 107A;
на ФИГ. 108A представлен вид сбоку части третьего приводного винта для хирургического эффектора, имеющего третью длину, причем третий приводной винт включает трехзаходную резьбу;
на ФИГ. 108B представлен вид с торца в поперечном сечении третьего приводного винта, показанного на ФИГ. 108A;
на ФИГ. 109A представлен вид сбоку части четвертого приводного винта для хирургического эффектора, имеющего четвертую длину, причем четвертый приводной винт включает четырехзаходную резьбу;
на ФИГ. 109B представлен вид с торца в поперечном сечении четвертого приводного винта, показанного на ФИГ. 109A;
на ФИГ. 110 представлен вид в перспективе с пространственным разделением компонентов режущего лезвия для применения с концевым эффектором, имеющим приводной винт;
на ФИГ. 111 представлен вид в перспективе шестереночной конфигурации для передачи поворота от приводного стержня к приводному винту концевого эффектора, причем части шестереночной конфигурации опущены в целях иллюстрации;
на ФИГ. 112 представлен вид в перспективе другого варианта осуществления хирургического инструмента;
на ФИГ. 112A представлен вид в перспективе конфигурации концевого эффектора хирургического инструмента, показанного на ФИГ. 112;
на ФИГ. 113 представлен общий вид с пространственным разделением компонентов части узла удлиненного стержня и соединительной конфигурации с возможностью быстрой разборки, показанной на ФИГ. 112;
на ФИГ. 114 представлен вид в перспективе части узла удлиненного стержня, показанного на ФИГ. 112 и 113;
на ФИГ. 115 представлен увеличенный вид с пространственным разделением компонентов в перспективе примера соединительной конфигурации с возможностью быстрой разборки, показанной на ФИГ. 112-114;
на ФИГ. 116 представлен вид сбоку в вертикальной проекции соединительной конфигурации с возможностью быстрой разборки, показанной на ФИГ. 112-115, причем блокирующее кольцо находится в разблокированном положении;
на ФИГ. 117 представлен другой вид в вертикальной проекции соединительной конфигурации с возможностью быстрой разборки, показанной на ФИГ. 112-116, причем блокирующее кольцо находится в заблокированном положении;
на ФИГ. 118 представлен вид в перспективе другого варианта осуществления хирургического инструмента;
на ФИГ. 119 представлен другой вид в перспективе варианта осуществления хирургического инструмента, показанного на ФИГ. 118;
на ФИГ. 120 представлен вид в поперечном сечении в перспективе варианта осуществления хирургического инструмента, показанного на ФИГ. 118 и 119;
на ФИГ. 121 представлен вид в поперечном сечении в перспективе части шарнирной системы;
на ФИГ. 122 представлен вид в поперечном сечении шарнирной системы, показанной на ФИГ. 121, в нейтральном положении;
на ФИГ. 123 представлен другой вид в поперечном сечении шарнирной системы, показанной на ФИГ. 121 и 122, в шарнирно повернутом положении;
на ФИГ. 124 представлен вид сбоку в вертикальной проекции части варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120, причем части опущены для ясности;
на ФИГ. 125 представлен вид сзади в перспективе части варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120, причем части опущены для ясности;
на ФИГ. 126 представлен вид сзади в вертикальной проекции части варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120, причем части опущены для ясности;
на ФИГ. 127 представлен вид спереди в перспективе части варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120, причем части опущены для ясности;
на ФИГ. 128 представлен вид сбоку в вертикальной проекции части варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120, причем части опущены для ясности;
на ФИГ. 129 представлен общий вид с пространственным разделением компонентов примера осуществления реверсирующей системы варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120;
на ФИГ. 130 представлен вид в перспективе варианта осуществления плеча рычага реверсирующей системы, показанной на ФИГ. 129;
на ФИГ. 131 представлен вид в перспективе кнопки оттягивания скальпеля реверсирующей системы, показанной на ФИГ. 129;
на ФИГ. 132 представлен вид в перспективе части варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120, причем части опущены для ясности, с плечом рычага в активируемом зацеплении с реверсирующей шестерней;
на ФИГ. 133 представлен вид в перспективе части варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120, причем части опущены для ясности, с плечом рычага в неактивированном положении;
на ФИГ. 134 представлен другой вид в перспективе части варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120, причем части опущены для ясности, с плечом рычага в активируемом зацеплении с реверсирующей шестерней;
на ФИГ. 135 представлен вид сбоку в вертикальной проекции части узла рукоятки варианта осуществления хирургического инструмента, показанного на ФИГ. 118-20, с узлом кнопки сдвигателя, перемещенным в положение, инициирующее поворот концевого эффектора при активации узла приводного стержня;
на ФИГ. 136 представлен другой вид сбоку в вертикальной проекции части узла рукоятки варианта осуществления хирургического инструмента, показанного на ФИГ. 118-120, с узлом кнопки сдвигателя, перемещенным в другое положение, инициирующее активацию пускового элемента в концевом эффекторе при активации узла приводного стержня;
на ФИГ. 137 представлен вид в поперечном сечении части другого варианта осуществления хирургического инструмента с шарнирным сочленением, выполненным с возможностью блокировки;
на ФИГ. 138 представлен другой вид в поперечном сечении части хирургического инструмента, показанного на ФИГ. 137, шарнирно повернутого в одной конфигурации;
на ФИГ. 139 представлен другой вид в поперечном сечении части хирургического инструмента, показанного на ФИГ. 137 и 138, шарнирно повернутого в другой конфигурации;
на ФИГ. 140 представлен вид в поперечном сечении варианта осуществления системы блокировки шарнирного поворота, показанной на ФИГ. 137, вдоль линии 140-140, показанной на ФИГ. 137;
на ФИГ. 141 представлен вид в поперечном сечении системы блокировки шарнирного поворота, показанной на ФИГ. 140, вдоль линии 141-141, показанной на ФИГ. 140;
на ФИГ. 142 представлен вид в поперечном сечении части хирургического инструмента, показанного на ФИГ. 137, вдоль линии 142-142, показанной на ФИГ. 137;
на ФИГ. 143 показано положение блокирующей проволоки, когда первое и второе блокирующие кольца находятся в зажатой или заблокированной конфигурации, когда концевой эффектор шарнирно повернут в первое шарнирное положение, показанное на ФИГ. 138;
на ФИГ. 144 показано положение блокирующей проволоки, когда первое и второе блокирующие кольца переведены пружиной в их соответствующие незажатые или разблокированные положения, когда концевой эффектор шарнирно повернут в первое шарнирное положение, показанное на ФИГ. 138;
на ФИГ. 145 показано положение блокирующей проволоки, когда первое и второе блокирующие кольца находятся в зажатой или заблокированной конфигурации, когда концевой эффектор шарнирно повернут во второе шарнирное положение, показанное на ФИГ. 139;
на ФИГ. 146 показано положение блокирующей проволоки, когда первое и второе блокирующие кольца переведены пружиной в их соответствующие незажатые или разблокированные положения, когда концевой эффектор шарнирно повернут в первое шарнирное положение, показанное на ФИГ. 139;
на ФИГ. 147 показан другой вид блокирующей проволоки, когда концевой эффектор шарнирно повернут относительно узла удлиненного стержня;
на ФИГ. 148 представлен вид в поперечном сечении другого варианта осуществления концевого эффектора, на котором узел упора находится в закрытом положении;
на ФИГ. 149 представлен другой вид в поперечном сечении варианта осуществления концевого эффектора, показанного на ФИГ. 148;
на ФИГ. 150 представлен другой вид в поперечном сечении варианта осуществления концевого эффектора, показанного на ФИГ. 148 и 149, на котором узел упора находится в закрытом положении;
на ФИГ. 151 представлен другой вид в поперечном сечении варианта осуществления концевого эффектора, показанного на ФИГ. 148-150, где показана трансмиссия привода, выполненная с возможностью активировать пусковой элемент;
на ФИГ. 152 представлен другой вид в поперечном сечении варианта осуществления концевого эффектора, показанного на ФИГ. 148-151, причем трансмиссия привода выполнена с возможностью поворачивать весь концевой эффектор вокруг продольной оси инструмента;
на ФИГ. 153 представлен вид в поперечном сечении концевого эффектора, показанного на ФИГ. 148-152, вдоль линии 153-153, показанной на ФИГ. 148, причем трансмиссия привода выполнена с возможностью активации узла упора;
на ФИГ. 154 представлен вид в поперечном сечении концевого эффектора, показанного на ФИГ. 148-153, вдоль линии 154-154, показанной на ФИГ. 148, причем трансмиссия привода выполнена с возможностью запуска пускового элемента;
на ФИГ. 155 представлен вид в поперечном сечении концевого эффектора, показанного на ФИГ. 148-154, вдоль линии 155-155, показанной на ФИГ. 148, причем трансмиссия привода выполнена с возможностью активации узла упора;
на ФИГ. 156 представлен вид в поперечном сечении концевого эффектора, показанного на ФИГ. 148-155, вдоль линии 156-156, показанной на ФИГ. 148;
на ФИГ. 157 представлен вид в поперечном сечении в перспективе другого варианта осуществления хирургического инструмента;
на ФИГ. 158 представлен вид в перспективе продольного канала концевого эффектора, показанного на ФИГ. 157;
на ФИГ. 159 представлен вид в перспективе варианта осуществления пружины упора;
на ФИГ. 160 показан вид сбоку в поперечном сечении концевого эффектора, показанного на ФИГ. 157, причем упор находится в закрытом положении после того, как пусковой элемент приведен в движение в его самое дистальное положение;
на ФИГ. 161 представлен вид в поперечном сечении части концевого эффектора, показанного на ФИГ. 160, вдоль линии 161-161, показанной на ФИГ. 160;
на ФИГ. 162 представлен другой вид в поперечном сечении концевого эффектора, показанного на ФИГ. 157, 160 и 161, на котором пусковой элемент оттягивается;
на ФИГ. 163 представлен вид в поперечном сечении части концевого эффектора, показанного на ФИГ. 162, вдоль линии 163-163;
на ФИГ. 164 представлен другой вид сбоку в поперечном сечении концевого эффектора, показанного на ФИГ. 157 и 160-163, причем пусковой элемент находится в самом проксимальном положении;
на ФИГ. 165 представлен вид в поперечном сечении концевого эффектора, показанного на ФИГ. 157 и 160-164, вдоль линии 165-165, показанной на ФИГ. 164;
на ФИГ. 166 представлен другой вид сбоку в поперечном сечении концевого эффектора, показанного на ФИГ. 157 и 160-165, после того как соленоид вытянул закрывающую трубку в самое проксимальное положение;
на ФИГ. 167 представлен вид в поперечном сечении концевого эффектора, показанного на ФИГ. 157 и 160-166, вдоль линии 167-167, показанной на ФИГ. 166;
на ФИГ. 168 представлен другой вид сбоку в поперечном сечении концевого эффектора, показанного на ФИГ. 157 и 160-167, причем упор находится в открытом положении, а соленоид уже вытянул закрывающую трубку в самое проксимальное положение;
на ФИГ. 169 представлен другой вид сбоку в поперечном сечении концевого эффектора, показанного на ФИГ. 157 и 160-168, после того как пусковой элемент переместился в исходное положение;
на ФИГ. 170 представлен другой вид сбоку в поперечном сечении концевого эффектора, показанного на ФИГ. 157 и 160-169, причем узел упора закрыт и пусковой элемент готов к запуску;
на ФИГ. 171 представлен частичный вид в поперечном сечении другой конфигурации с возможностью быстрой разборки для соединения дистальной части стержня, которую можно прикрепить к концевому эффектору, с проксимальной частью стержня, которую можно соединить с монтажной частью для инструмента роботизированной системы или с узлом рукоятки;
на ФИГ. 172 представлен другой частичный вид в поперечном сечении конфигурации с возможностью быстрой разборки, показанной на ФИГ. 171;
на ФИГ. 173 представлен вид с торца проксимальной части стержня конфигурации с возможностью быстрой разборки, показанной на ФИГ. 171 и 172;
на ФИГ. 174 представлен вид в поперечном сечении варианта осуществления блокирующего кольца, выполненного с возможностью перемещения по оси, конфигурации с возможностью быстрой разборки, показанной на ФИГ. 171 и 172;
на ФИГ. 174A представлен вид в перспективе варианта осуществления блокирующего кольца, показанного на ФИГ. 174;
на ФИГ. 175 представлен другой вид в поперечном сечении конфигурации с возможностью быстрой разборки, показанной на ФИГ. 171 и 172, на котором показано исходное соединение дистальной и проксимальной частей приводного стержня;
на ФИГ. 176 представлен другой вид в поперечном сечении конфигурации с возможностью быстрой разборки, показанной на ФИГ. 171, 172 и 175, на котором показано исходное соединение соответствующих сегментов поворотных кабелей;
на ФИГ. 177 представлен другой вид в поперечном сечении конфигурации с возможностью быстрой разборки, показанной на ФИГ. 175, после того как дистальная часть приводного стержня была зафиксирована на проксимальной части приводного стержня; и
на ФИГ. 178 представлен другой вид в поперечном сечении конфигурации с возможностью быстрой разборки, показанной на ФИГ. 176, после того как соответствующие сегменты поворотного кабеля были зафиксированы друг с другом.
ПОДРОБНОЕ ОПИСАНИЕ
Заявителю настоящей заявки также принадлежат следующие заявки на патенты, поданные в тот же день, каждая из которых полностью включена в настоящий документ путем ссылки.
1. Заявка на патент США сер. № _____________, озаглавленная «Гибкий приводной элемент» (досье патентного поверенного № END7131USNP/120135).
2. Заявка на патент США сер. № _____________, озаглавленная «Многофункциональное хирургическое устройство с электропитанием и с внешними элементами для рассечения» (досье патентного поверенного № END7132USNP/120136).
3. Заявка на патент США сер. № _____________, озаглавленная «Соединительные конфигурации для прикрепления хирургических концевых эффекторов к их приводным системам» (досье патентного поверенного № END7133USNP/120137).
4. Заявка на патент США сер. № _____________, озаглавленная «Поворотные закрывающие конфигурации с возможностью активации для хирургического концевого эффектора» (досье патентного поверенного № END7134USNP/120138).
5. Заявка на патент США сер. № _____________, озаглавленная «Хирургические концевые эффекторы с наклоненными контактирующими с тканью поверхностями» (досье патентного поверенного № END7135USNP/120139).
6. Заявка на патент США сер. № _____________, озаглавленная «Соединительная конфигурация взаимозаменяемых концевых эффекторов» (досье патентного поверенного № END7136USNP/120140).
7. Заявка на патент США сер. № _____________, озаглавленная «Конфигурации браншей и электродов хирургического концевого эффектора» (досье патентного поверенного № END7137USNP/120141).
8. Заявка на патент США сер. № _____________, озаглавленная «Многоосевые шарнирные и поворотные хирургические инструменты» (досье патентного поверенного № END7138USNP/120142).
9. Заявка на патент США сер. № _____________, озаглавленная «Дифференциальные блокирующие конфигурации для поворотных хирургических инструментов с электропитанием» (досье патентного поверенного № END7139USNP/120143).
10. Заявка на патент США сер. № _____________, озаглавленная «Взаимозаменяемый клипсонакладыватель» (досье патентного поверенного №END7140USNP/120144).
11. Заявка на патент США сер. № _____________, озаглавленная «Конфигурации блокировки пусковой системы для хирургических инструментов» (досье патентного поверенного № END7141USNP/120145).
12. Заявка на патент США сер. № _____________, озаглавленная «Узлы поворотных приводных стержней для хирургических инструментов с шарнирно поворачиваемыми концевыми эффекторами» (досье патентного поверенного № END7142USNP/120146).
13. Заявка на патент США сер. № _____________, озаглавленная «Поворотные приводные конфигурации для хирургических инструментов» (досье патентного поверенного № END7143USNP/120147).
14. Заявка на патент США сер. № _____________, озаглавленная «Сменная кассета с клипсами для клипсонакладывателя» (досье патентного поверенного № END7145USNP/120149).
15. Заявка на патент США сер. № _____________, озаглавленная «Блокировка пустой кассеты с клипсами» (досье патентного поверенного № END7146USNP/120150).
16. Заявка на патент США сер. № _____________, озаглавленная «Система хирургических инструментов, включающая сменные концевые эффекторы» (досье патентного поверенного № END7147USNP/120151).
17. Заявка на патент США сер. № _____________, озаглавленная «Поворотные опорные соединительные узлы для соединения первой части хирургического инструмента со второй частью хирургического инструмента» (досье патентного поверенного № END7148USNP/120152).
18. Заявка на патент США сер. № _____________, озаглавленная «Соединения электродов для поворотных приводных хирургических инструментов» (досье патентного поверенного № END7149USNP/120153).
Заявителю также принадлежат следующие заявки на патенты, каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США сер. № 13/118,259, озаглавленная «Хирургический инструмент с беспроводной связью между блоком управления роботизированной системы и удаленным датчиком», публикация заявки на патент США № 2011-0295270 A1;
заявка на патент США сер. № 13/118,210, озаглавленная «Одноразовый модуль загрузки с приводом от двигателя и роботизированным управлением», публикация заявки на патент США № 2011-0290855 A1;
заявка на патент США сер. № 13/118,194, озаглавленная «Эндоскопический канал доступа с роботизированным управлением», публикация заявки на патент США № 2011-0295242;
заявка на патент США сер. № 13/118,253, озаглавленная «Хирургический инструмент с роботизированным управлением и электроприводом», публикация заявки на патент США № 2011-0295269 A1;
заявка на патент США сер. № 13/118,278, озаглавленная «Хирургические сшивающие устройства с роботизированным управлением, которые образуют сформированные скобы, имеющие разную длину», публикация заявки на патент США № 2011-0290851 A1;
заявка на патент США сер. № 13/118,190, озаглавленная «Режущий и сшивающий инструмент с роботизированным управлением и электроприводом», публикация заявки на патент США № 2011-0288573 A1;
заявка на патент США сер. № 13/118,223, озаглавленная «Стержневые поворотные приводные системы с роботизированным управлением для хирургических инструментов», публикация заявки на патент США № 2011-0290854 A1;
заявка на патент США сер. № 13/118,263, озаглавленная «Хирургический инструмент с записывающими функциями и роботизированным управлением», публикация заявки на патент США № 2011-0295295 A1;
заявка на патент США сер. № 13/118,272, озаглавленная «Хирургический инструмент с роботизированным управлением и функциями обратной связи по усилию», публикация заявки на патент США № 2011-0290856 A1;
заявка на патент США сер. № 13/118,246, озаглавленная «Хирургический инструмент с трехрогим элементом шкива и роботизированным управлением», публикация заявки на патент США № 2011-0290853 A1; и
заявка на патент США сер. № 13/118,241, озаглавленная «Хирургические сшивающие инструменты с поворачиваемыми конфигурациями для размещения скоб».
Для более полного понимания принципов конструкции, функционирования, производства и применения устройств и способов, описанных в настоящем документе, ниже представлено описание определенных примеров осуществления. Один или более примеров данных примеров осуществления показаны на сопроводительных чертежах. Специалистам в данной области будет понятно, что устройства и способы, подробно описанные в настоящем документе и показанные на сопроводительных чертежах, представляют собой не имеющие ограничительного характера примеры осуществления и что объем различных примеров осуществления настоящего изобретения определяется только формулой изобретения. Элементы, показанные или описанные применительно к одному примеру осуществления, можно комбинировать с элементами других примеров осуществления. Предполагается, что объем настоящего изобретения включает такие модификации и изменения.
На ФИГ. 1 представлен главный контроллер 12, который используется в связи с ведомым штативом роботизированного манипулятора 20 типа, представленного на ФИГ. 2. Главный контроллер 12 и ведомый штатив роботизированного манипулятора 20, а также их соответствующие компоненты и системы управления в совокупности в настоящем документе называются роботизированной системой 10. Примеры таких систем и устройств описаны в патенте США № 7,524,320, который включен в настоящий документ путем ссылки. Таким образом, различные элементы таких устройств не будут подробно описаны в настоящем документе помимо тех, которые могут быть необходимы для понимания различных примеров осуществления, описанных в настоящем документе. Как известно, главный контроллер 12 по существу включает главные контроллеры (по существу представлены как элемент 14 на ФИГ. 1), которые захватывает хирург и которыми он манипулирует в пространстве, наблюдая за процедурой посредством стереоскопического дисплея 16. Главные контроллеры 12 по существу содержат ручные устройства ввода, которые предпочтительно перемещаются с множеством степеней свободы и которые часто дополнительно имеют рукоятку с возможностью активации для активации инструментов (например, для закрытия браншей зажима, приложения электрического потенциала к электроду и т.п.).
Как показано на ФИГ. 2, в одной форме роботизированный штатив манипулятора 20 выполнен с возможностью активации множества хирургических инструментов, по существу обозначенных как 30. Различные роботизированные хирургические системы и способы, использующие главный контроллер и роботизированный штатив манипулятора, описаны в патенте США № 6,132,368, озаглавленном «Многокомпонентная система и способ дистанционного восприятия из рабочей зоны», полное описание которого включено в настоящее описание путем ссылки. Как показано на фигуре, роботизированный штатив манипулятора 20 включает основание 22, на котором в показанном варианте осуществления поддерживаются три хирургических инструмента 30. Каждый из хирургических инструментов 30 поддерживается рядом рычажных механизмов, шарнирно поворачиваемых вручную (по существу их называют настраиваемыми соединениями 32), и роботизированным манипулятором 34. Данные структуры в настоящем документе показаны с защитными чехлами, направленными на большую часть роботизированного рычажного механизма. Данные защитные чехлы могут быть необязательными и могут быть ограничены в размерах или полностью устранены для минимизации инерции, с которой сталкиваются сервомеханизмы, используемые для манипулирования такими устройствами, для ограничения объема перемещающихся компонентов, чтобы избежать столкновения, а также для ограничения общего веса штатива 20. Штатив 20 по существу имеет размеры, подходящие для транспортировки штатива 20 между операционными. Как правило, штатив 20 выполнен с возможностью прохода через стандартные двери операционной и помещения в стандартные лифты больниц. Штатив 20 будет предпочтительно иметь соответствующий вес и включать колесную систему (или другое средство транспортировки), которая позволит одному человеку располагать штатив 20 смежно с операционным столом.
Как показано на ФИГ. 3, роботизированные манипуляторы 34 включают рычажной механизм 38, который ограничивает перемещение хирургического инструмента 30. Рычажный механизм 38 включает жесткие звенья, соединенные вместе посредством поворотных соединений в параллелограммной конфигурации, так что хирургический инструмент 30 поворачивается вокруг точки в пространстве 40, как более полно описано в патенте США № 5,817,084, полное описание которого включено в настоящий документ путем ссылки. Параллелограммная конфигурация ограничивает поворот вокруг оси 40a, иногда называемой горизонтальной осью поворота. Звенья, поддерживающие параллелограммный рычажной механизм, шарнирно установлены в настраиваемые соединения 32 (ФИГ. 2) таким образом, что хирургический инструмент 30 дополнительно поворачивается вокруг оси 40b, иногда называемой вертикальной осью поворота. Горизонтальная и вертикальная оси поворота 40a, 40b пересекаются в удаленном центре 42, выровненном вдоль стержня 44 хирургического инструмента 30. Хирургический инструмент 30 может иметь дополнительные степени свободы, поддерживаемые манипулятором 50, включая скользящее движение хирургического инструмента 30 вдоль продольной оси инструмента LT-LT. Когда хирургический инструмент 30 скользит вдоль оси инструмента LT-LT относительно манипулятора 50 (стрелка 40c), удаленный центр 42 остается неподвижным относительно основания 52 манипулятора 50. Таким образом, весь манипулятор по существу перемещается для изменения положения удаленного центра 42. Рычажной механизм 54 манипулятора 50 приводится в движение посредством ряда двигателей 56. Данные двигатели активно перемещают рычажной механизм 54 в ответ на команды, поступающие от процессора системы управления. Двигатели 56 также используют при манипуляциях хирургическим инструментом 30. Альтернативная структура настраиваемых соединений показана на ФИГ. 4. В данном варианте осуществления хирургический инструмент 30 поддерживается альтернативной структурой манипулятора 50' между двумя инструментами манипуляции тканью.
Другие варианты осуществления могут включать широкий спектр альтернативных роботизированных структур, включая те, которые описаны в патенте США № 5,878,193, озаглавленном «Автоматизированная эндоскопическая система для оптимального расположения», полное описание которого включено в настоящий документ путем ссылки. Кроме того, в то время как передача данных между роботизированным компонентом и процессором роботизированной хирургической системы описана со ссылкой на обмен данными между хирургическим инструментом 30 и главным контроллером 12, аналогичная связь может происходить между схемой манипулятора, настраиваемым соединением, эндоскопом или другим устройством захвата изображения или т.п. и процессором роботизированной хирургической системы для проверки совместимости компонентов, компонентной идентификации компонентов, компонентной калибровки (например, смещения или т.п.) соединения, подтверждения соединения компонента с роботизированной хирургической системой или т.п.
Хирургический инструмент 100, надлежащим образом адаптированный для применения в роботизированной системе 10, показан на ФИГ. 5. Как показано на данной фигуре, хирургический инструмент 100 включает хирургический концевой эффектор 1000 с эндоскопическим рассекателем. Хирургический инструмент 100 по существу включает узел удлиненного стержня 200, функционально соединенный с манипулятором 50 посредством монтажной части инструмента, по существу обозначенной как элемент 300. Хирургический инструмент 100 дополнительно включает стыковочный элемент 302, который механически и электрически соединяет монтажную часть для инструмента 300 с манипулятором. Один стыковочный элемент 302 показан на ФИГ. 6-10. В варианте осуществления, показанном на ФИГ. 6-10, монтажная часть для инструмента 300 включает монтажную пластину для инструмента 304, которая функционально поддерживает множество (четыре показаны на ФИГ. 10) поворачиваемых корпусных частей, ведомых дисков или элементов 306, каждый из которых включает пару штифтов 308, которые проходят от поверхности ведомого элемента 306. Один штифт 308 расположен ближе к оси поворота каждого ведомого элемента 306, чем другой штифт 308 того же ведомого элемента 306, что позволяет обеспечить выравнивание ведомого элемента 306 под положительным углом. Стыковочный элемент 302 может включать адаптерную часть 310, которая выполнена с возможностью монтажного зацепления монтажной пластины 304, как дополнительно описано ниже. Показанная адаптерная часть 310 включает совокупность электрических соединительных штифтов 312 (ФИГ. 8), которые могут быть соединены с устройством памяти печатной платой, находящейся внутри монтажной части 300. Хотя стыковочный элемент 302 описан применительно к механическим, электрическим и магнитным соединительным элементам, следует понимать, что в других вариантах осуществления можно использовать различные формы телеметрии, включая инфракрасную, индуктивную связь или т.п.
Как показано на ФИГ. 6-9, адаптерная часть 310 по существу включает сторону инструмента 314 и сторону держателя 316. На плавающей пластине 318, которая имеет ограниченный диапазон перемещения по отношению к окружающей структуре адаптера перпендикулярно к основным поверхностям адаптера 310, установлено множество поворачиваемых элементов 320. Осевое перемещение плавающей пластины 318 позволяет отсоединять поворачиваемые элементы 320 от монтажной части для инструмента 300 при активации рычагов или других конструкций фиксаторов вдоль сторон корпуса монтажной части для инструмента (не показана). В других вариантах осуществления можно использовать другие механизмы/конфигурации для разъемного соединения монтажной части для инструмента 300 с адаптером 310. В вариантах осуществления, показанных на ФИГ. 6-10, поворачиваемые элементы 320 упруго установлены на плавающей пластине 318 упругими радиальными элементами, которые проходят зубцами по окружности поворачиваемых элементов 320. Поворачиваемые элементы 320 могут перемещаться по оси относительно пластины 318, отклоняя данные упругие структуры. В первом осевом положении (к стороне инструмента 314) поворачиваемые элементы 320 могут свободно поворачиваться без ограничения угла поворота. Однако при перемещении поворачиваемых элементов 320 по оси к стороне инструмента 314 язычки 322 (радиально направленные от поворачиваемых элементов 320) латерально зацепляют стопоры на плавающих пластинах таким образом, чтобы ограничивать угол поворота поворачиваемых элементов 320 вокруг их осей. Данный ограниченный поворот можно использовать для того, чтобы зацепить поворачиваемые элементы 320 с приводными штифтами 332 соответствующей части держателя инструмента 330 роботизированной системы 10, когда приводные штифты 332 будут толкать поворачиваемые элементы 320 в положение с ограниченным углом поворота, пока штифты 332 не выровняются с отверстиями 334' (и не пройдут вовнутрь). Отверстия 334 на стороне инструмента 314 и отверстия 334' на стороне держателя 316 поворачиваемых элементов 320 выполнены с возможностью точного выравнивания приводных элементов 306 (ФИГ. 10) монтажной части для инструмента 300 с приводными элементами 336 держателя инструмента 330. Как описано выше относительно внутренних и внешних штифтов 308 ведомых элементов 306, отверстия 334, 334' находятся на различных расстояниях от оси поворота соответствующих поворачиваемых элементов 306 таким образом, чтобы не произошло выравнивание под углом 180 градусов от заданного положения. Кроме того, каждое из отверстий 334 может быть слегка радиально вытянуто таким образом, чтобы надлежащим образом принимать штифты 308 в периферийной ориентации. Это позволяет штифтам 308 скользить радиально в отверстиях 334 и допускать некоторое нарушение осевого выравнивания между инструментом 100 и держателем инструмента 330, минимизируя любое угловое смещение и зазор между приводным и ведомым элементами. Отверстия 334 на стороне инструмента 314 могут быть смещены приблизительно на 90 градусов от отверстий 334' (показано пунктирными линиями) на стороне держателя 316, как лучше всего показано на ФИГ. 9.
В варианте осуществления, показанном на ФИГ. 6-10, совокупность соединительных контактных штифтов 340, размещенных на стороне держателя 316 адаптера 310 и на стороне инструмента 314 адаптера 310, включает пазы 342 (ФИГ. 9) для приема совокупности штифтов (не показана) из монтажной части для инструмента 300. Наряду с передачей электрических сигналов между хирургическим инструментом 100 и держателем инструмента 330 по меньшей мере некоторые из данных зацеплений могут быть связаны с устройством памяти адаптера 344 (ФИГ. 8) печатной платой адаптера 310.
В варианте осуществления, представленном на ФИГ. 6-10, используется отсоединяемая конфигурация фиксатора 346 для разъемного прикрепления адаптера 310 к держателю инструмента 330. При использовании в настоящем документе термин «узел привода инструмента» в контексте роботизированной системы 10 относится по меньшей мере к адаптеру 310 и держателю инструмента 330, которые по существу обозначены элементом 110 на ФИГ. 6. Как показано на ФИГ. 6, держатель инструмента 330 включает первую конфигурацию защелкивающегося штифта 337, размер которого позволяет ему приниматься в соответствующие пазы захватных скоб 311, присутствующие в адаптере 310. Кроме того, держатель инструмента 330 дополнительно содержит вторые защелкивающиеся штифты 338, размер которых позволяет им удерживаться в соответствующих пазах захватных скоб 313 в адаптере 310. См. ФИГ. 8. Узел фиксатора 315 поддерживается с возможностью перемещения на адаптере 310 и имеет пару образованных в нем захватных скоб 317, которые могут смещаться из первого защелкнутого положения, в котором защелкивающиеся штифты 338 удерживаются в соответствующих захватных скобах 313, в незащелкнутое положение, в котором захваты 317 выровнены со скобами 313, что позволяет вставить или извлечь вторые защелкивающиеся штифты 338 в захватные скобы 313 или из них. Для смещения узла фиксатора в защелкнутое положение используют пружину или пружины (не показаны). Выступ на стороне инструмента 314 адаптера 310 предусматривает скользящее введение латерально направленных язычков на корпусе для монтажа инструмента (не показано).
Как показано на ФИГ. 5 и 11-16, монтажная часть для инструмента 300 функционально поддерживает множество приводных систем для генерирования различных форм управляющих движений, необходимых для работы конкретного типа концевого эффектора, соединенного с дистальным концом узла удлиненного стержня 200. Как показано на ФИГ. 5 и 11-13, монтажная часть для инструмента 300 включает первую приводную систему, по существу обозначенную элементом 350, которая выполнена с возможностью приема соответствующего «первого» поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10 и преобразования данного первого поворотного выходного движения в первое поворотное управляющее движение, сообщаемое хирургическому концевому эффектору. В показанном варианте осуществления первое поворотное управляющее движение применяется для поворота узла удлиненного стержня 200 (и хирургического концевого эффектора 1000) вокруг продольной оси инструмента LT-LT.
В варианте осуществления, показанном на ФИГ. 5 и 11-13, первая приводная система 350 включает сегмент трубчатой шестерни 354, образованный (или прикрепленный к нему) на проксимальном конце 208 проксимального трубчатого сегмента 202 узла удлиненного стержня 200. Проксимальный конец 208 проксимального сегмента трубки 202 поддерживается с возможностью поворота на монтажной пластине для инструмента 304 монтажной части для инструмента 300 при помощи переднего опорного кармана 352, установленного на монтажной пластине для инструмента 304. См. ФИГ. 11. Сегмент трубчатой шестерни 354 поддерживается в зубчатом зацеплении с узлом первой поворотной шестерни 360, функционально поддерживаемой на монтажной пластине для инструмента 304. Как показано на ФИГ. 11, узел поворотной шестерни 360 содержит первую поворотную приводную шестерню 362, соединенную с соответствующим первым из ведомых дисков или элементов 306 на стороне держателя 316 монтажной пластины для инструмента 304, когда монтажная часть для инструмента 300 соединена с узлом привода инструмента 110. См. ФИГ. 10. Узел поворотной шестерни 360 дополнительно содержит первую поворотную ведомую шестерню 364, которая поддерживается с возможностью поворота на монтажной пластине для инструмента 304. Первая поворотная ведомая шестерня 364 находится в зубчатом зацеплении со второй поворотной ведомой шестерней 366, которая, в свою очередь, находится в зубчатом зацеплении с сегментом трубчатой шестерни 354. Сообщение первого поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10 соответствующему ведомому элементу 306 вызывает поворот поворотной приводной шестерни 362. Поворот поворотной приводной шестерни 362 в конечном итоге приведет к повороту узла удлиненного стержня 200 (и хирургического концевого эффектора 1000) вокруг продольной оси инструмента LT-LT (показано стрелкой R на ФИГ. 5). Следует понимать, что сообщение поворотного выходного движения от узла привода инструмента 110 в одном направлении приведет к повороту узла удлиненного стержня 200 и хирургического концевого эффектора 1000 вокруг продольной оси инструмента LT-LT в первом направлении поворота, а сообщение поворотного выходного движения в противоположном направлении приведет к повороту узла удлиненного стержня 200 и хирургического концевого эффектора 1000 во втором направлении поворота, противоположном первому направлению поворота.
В варианте осуществления, показанном на ФИГ. 5 и 11-16, монтажная часть для инструмента 300 дополнительно включает вторую приводную систему, по существу обозначенную элементом 370, которая выполнена с возможностью приема соответствующего «второго» поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10 и преобразования данного второго поворотного выходного движения во второе поворотное управляющее движение, сообщаемое хирургическому концевому эффектору. Вторая приводная система 370 включает вторую поворотную приводную шестерню 372, соединенную с соответствующим вторым из ведомых дисков или элементов 306 на стороне держателя 316 на монтажной пластине для инструмента 304, когда монтажная часть для инструмента 300 соединена с узлом привода инструмента 110. См. ФИГ. 10. Вторая приводная система 370 дополнительно содержит первую поворотную ведомую шестерню 374, которая поддерживается с возможностью поворота на монтажной пластине для инструмента 304. Первая поворотная ведомая шестерня 374 находится в зубчатом зацеплении с шестерней стержня 376, установленной на проксимальном сегменте приводного стержня 380 с возможностью перемещения, но без возможности поворота. В показанном варианте осуществления шестерня стержня 376 установлена без возможности поворота на проксимальном сегменте приводного стержня 380 при помощи ряда осевых шпоночных пазов 384, которые позволяют шестерне стержня 376 перемещаться вдоль оси по проксимальному сегменту приводного стержня 380, когда она прикреплена к нему без возможности поворота. Поворот проксимального сегмента приводного стержня 380 приводит к передаче второго поворотного управляющего движения на хирургический концевой эффектор 1000.
В варианте осуществления, представленном на ФИГ. 5 и 11-16, вторая приводная система 370 включает сдвигающую систему 390 для избирательного смещения проксимального сегмента приводного стержня 380 по оси, которая перемещает шестерню стержня 376 в зубчатое зацепление с первой поворотной ведомой шестерней 374 и из него. Например, как показано на ФИГ. 11-13, проксимальный сегмент приводного стержня 380 поддерживается во втором опорном кармане 382, прикрепленном к монтажной пластине для инструмента 304, таким образом, чтобы проксимальный сегмент приводного стержня 380 мог перемещаться по оси и поворачиваться относительно второго опорного кармана 382. По меньшей мере в одной форме сдвигающая система 390 дополнительно включает направляющую траверсу сдвигателя 392, поддерживаемую с возможностью скольжения на монтажной пластине для инструмента 304. Проксимальный сегмент приводного стержня 380 поддерживается в направляющей траверсе сдвигателя 392 и имеет на себе пару колец 386, расположенных таким образом, чтобы смещение направляющей траверсы сдвигателя 392 на монтажной пластине для инструмента 304 приводило к осевому перемещению проксимального сегмента приводного стержня 380. По меньшей мере в одной форме сдвигающая система 390 дополнительно включает соленоид сдвигателя 394, функционально взаимодействующий с направляющей траверсой сдвигателя 392. Соленоид сдвигателя 394 принимает управляющее питание от роботизированного контроллера 12 таким образом, чтобы при активации соленоида сдвигателя 394 направляющая траверса сдвигателя 392 перемещалась в дистальном направлении DD.
В показанном варианте осуществления пружина стержня 396 установлена на проксимальном сегменте приводного стержня 380 между шестерней стержня 376 и вторым опорным карманом 382 с целью смещения шестерни стержня 376 в проксимальном направлении PD и введения ее в зубчатое зацепление с первой поворотной ведомой шестерней 374. См. ФИГ. 11, 13 и 14. Поворот второй поворотной приводной шестерни 372 в ответ на поворотные выходные движения, генерируемые роботизированной системой 10, в конечном итоге приводит к повороту проксимального сегмента приводного стержня 380 и других связанных с ним компонентов приводного стержня (узел приводного стержня 388) вокруг продольной оси LT-LT. Следует понимать, что сообщение поворотного выходного движения от узла привода инструмента 110 в одном направлении приведет к повороту проксимального сегмента приводного стержня 380 и в конечном счете других связанных с ним компонентов в первом направлении, а сообщение поворотного выходного движения в противоположном направлении приведет к повороту проксимального сегмента приводного стержня 380 во втором направлении, противоположном первому направлению. Когда необходимо сместить проксимальный сегмент приводного стержня 380 в дистальном направлении DD, как более подробно описано ниже, роботизированный контроллер 12 активизирует соленоид сдвигателя 390, смещая направляющую траверсу сдвигателя 392 в дистальном направлении DD.
На ФИГ. 17 и 18 представлен другой вариант осуществления, в котором используются те же компоненты, что и в варианте осуществления, показанном на ФИГ. 5 и 11-16, за исключением того, что в данном варианте осуществления используется приводной двигатель 400 с питанием от аккумуляторной батареи, подающий поворотные движения на проксимальный сегмент приводного стержня 380. Такая конфигурация позволяет монтажной части для инструмента генерировать более сильные поворотные выходные движения и крутящий момент, что может быть благоприятным решением при использовании разных форм концевых эффекторов. Как показано на данных фигурах, двигатель 400 прикреплен к монтажной пластине инструмента 304 при помощи опорной конструкции 402 таким образом, чтобы ведущая шестерня 404, соединенная с двигателем 400, удерживалась в зубчатом зацеплении с шестерней стержня 376. В варианте осуществления, показанном на ФИГ. 17 и 18, опорная конструкция 402 выполнена с возможностью съемного зацепления фиксирующих прорезей 303, выполненных в монтажной пластине для инструмента 304, с возможностью прикрепления корпусного элемента (не показан) к монтажной пластине 304, если двигатель 400 не используется. Таким образом, чтобы использовать двигатель 400, врач снимает корпус с монтажной пластины для инструмента 304 и вставляет ножки 403 опорной конструкции в фиксирующие прорези 303 в монтажной пластине для инструмента 304. Проксимальный сегмент приводного стержня 380 и другие связанные с ним компоненты приводного стержня поворачиваются вокруг продольной оси LT-LT посредством подачи питания на двигатель 400. Как показано на фигуре, двигатель 400 получает питание от аккумуляторной батареи. Однако в такой конфигурации двигатель 400 взаимодействует с роботизированным контроллером 12 таким образом, чтобы роботизированная система 10 управляла активацией двигателя 400. В альтернативных вариантах осуществления двигатель 400 активируется вручную переключателем (не показан), установленным на самом двигателе 400 или на монтажной части для инструмента 300. В других вариантах осуществления двигатель 400 может принимать питание и сигналы управления от роботизированной системы.
Вариант осуществления, показанный на ФИГ. 5 и 11-16, содержит активируемую вручную реверсирующую систему, по существу обозначенную элементом 410, для сообщения обратного поворотного движения вручную проксимальному сегменту приводного стержня 380 в том случае, если двигатель выйдет из строя или произойдет сбой или утрата питания роботизированной системы. Такая активируемая вручную реверсирующая система 410 может быть особенно подходящим решением, например, если узел приводного стержня 388 окажется зажатым или иным способом заблокированным таким образом, что поворот компонентов приводного стержня в обратном направлении только под воздействием двигателя станет невозможен. В показанном варианте осуществления механически активируемая реверсирующая система 410 включает узел приводных шестерен 412, способный к избирательному зацеплению со второй поворотной ведомой шестерней 376 и к ручной активации с сообщением реверсирующего поворотного движения проксимальному сегменту приводного стержня 380. Узел приводных шестерен 412 включает реверсирующую шестерню 414, которая установлена с возможностью перемещения на монтажной пластине для инструмента 304. Реверсирующая шестерня 414 установлена на поворотном стержне 416, установленном с возможностью перемещения на монтажной пластине для инструмента 304 через паз 418. См. ФИГ. 12. В варианте осуществления, показанном на ФИГ. 5 и 11-16, активируемая вручную реверсирующая система 410 дополнительно включает активируемую вручную приводную шестерню 420, которая включает корпусную часть 422, которая имеет образованный на ней дугообразный зубчатый сегмент 424. Корпусная часть 422 шарнирно соединена с монтажной пластиной для инструмента 304 с возможностью осуществления избирательного поворотного движения вокруг оси активатора A-A (ФИГ. 11), по существу перпендикулярной монтажной пластине для инструмента 304.
На ФИГ. 11-14 представлена активируемая вручную реверсирующая система 410 в первом неактивированном положении. В одном примере формы часть рукоятки 426 активатора образована на корпусной части 422 или иным образом прикреплена к ней. Часть рукоятки 426 активатора имеет такой размер относительно монтажной пластины для инструмента 304, чтобы между частью рукоятки 426 и монтажной пластиной для инструмента 304 возникало небольшое взаимодействие для удержания части рукоятки 426 в первом неактивированном положении. Однако когда врачу необходимо вручную активировать узел приводных шестерен 412, он может легко преодолеть это сопротивление, сообщив поворотное движение части рукоятки 426. Как показано на ФИГ. 11-14, когда узел приводных шестерен 412 находится в первом неактивированном положении, дугообразный зубчатый сегмент 424 выведен из зубчатого зацепления с реверсирующей шестерней 414. Когда врачу необходимо сообщить обратное поворотное движение проксимальному сегменту приводного стержня 380, он начинает сообщать поворотное одностороннее движение приводной шестерне 420. Когда приводная шестерня 420 начинает поворачиваться вокруг оси активации A-A, часть ее основной части 422 входит в контакт с частью реверсирующей шестерни 414 и перемещает реверсирующую шестерню 414 по оси в дистальном направлении DD, выводя приводную шестерню стержня 376 из зубчатого зацепления с первой поворотной ведомой шестерней 374 второй приводной системы 370. См. ФИГ. 15. При повороте приводной шестерни 420 дугообразный сегмент шестерни 424 зубчатым образом зацепляет реверсирующую шестерню 414. Продолжающееся одностороннее движение приводной шестерни 420 приводит к сообщению обратного поворотного движения приводной шестерне стержня 376 и в конечном счете проксимальному сегменту приводного стержня 380. Врач может продолжать одностороннее движение узла приводных шестерен 412 столько, сколько это необходимо для полного освобождения или обратного движения связанного(-ых) с ним компонента(-ов) концевого эффектора. После того как желаемое количество обратного поворотного движения было сообщено проксимальному сегменту приводного стержня 380, врач возвращает приводную шестерню 420 в исходное или неактивированное положение, в котором дугообразный сегмент шестерни 416 выведен из зубчатого зацепления с приводной шестерней стержня 376. В данном положении пружина стержня 396 снова смещает шестерню стержня 376 в зубчатое зацепление с первой поворотной ведомой шестерней 374 второй приводной системы 370.
В процессе применения врач может подавать управляющие команды на контроллер или блок управления роботизированной системы 10, которая «роботизированно генерирует» выходные движения, которые в конечном итоге передаются на различные компоненты второй приводной системы 370. В настоящем документе термины «роботизированно генерирует» или «роботизированно сгенерированный» обозначают создание движений путем подачи питания и сигналов управления на двигатели роботизированной системы и другие приводные компоненты с электропитанием. Данный термин отличается от термина «активируемый вручную», который обозначает действия, предпринимаемые врачом, приводящие к созданию управляющих движений, независимых от движений, создаваемых работающими двигателями роботизированной системы. Сообщение роботизированно сгенерированных управляющих движений второй приводной системе в первом направлении приводит к сообщению первого поворотного приводного движения узлу приводного стержня 388. Когда узел приводного стержня 388 поворачивается в первом направлении поворота, пусковой элемент 1200 приводится в движение в дистальном направлении DD из его исходного положения к его конечному положению в концевом эффекторе 1000. Сообщение роботизированно сгенерированных управляющих движений второй приводной системе во втором направлении приводит к сообщению второго поворотного приводного движения узлу приводного стержня 388. Когда узел приводного стержня 388 поворачивается во втором направлении поворота, пусковой элемент 1200 приводится в движение в проксимальном направлении PD из его конечного положения к его исходному положению в концевом эффекторе 1000. Когда врачу необходимо вручную сообщить поворотное управляющее движение узлу приводного стержня 388, узел приводного стержня 388 поворачивается во втором направлении поворота, в результате чего пусковой элемент 1200 перемещается в проксимальном направлении PD в концевом эффекторе. Другие варианты осуществления, содержащие те же компоненты, выполнены таким образом, чтобы ручное сообщение поворотного управляющего движения узлу приводного стержня вызывало поворот в первом направлении поворота, что можно использовать для того, чтобы помочь роботизированно сгенерированным управляющим движениям продвинуть пусковой элемент 1200 в дистальном направлении.
Узел приводного стержня, который используется для пуска, закрытия и поворота концевого эффектора, можно активировать и смещать вручную, что позволяет освободить и извлечь концевой эффектор из операционного поля, а также из брюшной полости даже в случае отказа двигателя(-лей), перебоев питания роботизированной системы и прочих отказов электроники. Активация части рукоятки 426 приводит к ручному созданию активирующих или управляющих усилий, которые прилагаются к узлу приводного стержня 388' при помощи различных компонентов активируемой вручную реверсирующей системы 410. Если часть рукоятки 426 находится в неактивированном положении, она смещается из активируемого зацепления с реверсирующей шестерней 414. Когда часть рукоятки 426 начинают активировать, она снова смещается в активируемое зацепление. Рукоятка 426 предназначена для повторения активации столько раз, сколько необходимо для полного освобождения пускового элемента 1200 и концевого эффектора 1000.
Как показано на ФИГ. 5 и 11-16, монтажная часть для инструмента 300 включает третью приводную систему 430, которая выполнена с возможностью приема соответствующего «третьего» поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10, и преобразования данного третьего поворотного выходного движения в третье поворотное управляющее движение. Третья приводная система 430 включает шкив третьего привода 432, соединенный с соответствующим третьим из ведомых дисков или элементов 306 на стороне держателя 316 на монтажной пластине для инструмента 304, когда монтажная часть для инструмента 300 соединена с узлом привода инструмента 110. См. ФИГ. 10. Шкив третьего привода 432 выполнен с возможностью сообщения третьего поворотного управляющего движения (в ответ на соответствующие поворотные выходные движения, сообщенные ему роботизированной системой 10) соответствующему кабелю третьего привода 434, который можно использовать для сообщения различных управляющих или манипуляционных движений концевому эффектору, функционально соединенному с узлом стержня 200. Как преимущественно показано на ФИГ. 11 и 12, кабель третьего привода 434 охватывает шпиндельный узел третьего привода 436. Шпиндельный узел третьего привода 436 шарнирно установлен на монтажной пластине для инструмента 304, и между шпиндельным узлом третьего привода 436 и монтажной пластиной для инструмента 304 установлена третья натяжная пружина 438, чтобы сохранялся требуемый уровень натяжения кабеля третьего привода 434. Как показано на фигурах, торцевая часть 434A кабеля третьего привода 434 проходит вокруг верхней части сложного блока 440, прикрепленного к монтажной пластине для инструмента 304, а торцевая часть кабеля 434B проходит вокруг шпули или стойки 442 сложного блока 440. Следует понимать, что сообщение третьего поворотного выходного движения узлу привода инструмента 110 в одном направлении приведет к повороту шкива третьего привода 432 в первом направлении и приведет к тому, что торцевые части кабеля 434A и 434B будут перемещаться в противоположных направлениях, сообщая управляющие движения концевому эффектору 1000 или узлу удлиненного стержня 200, как более подробно описано ниже. Таким образом, при повороте шкива третьего привода 432 в первом направлении поворота торцевая часть кабеля 434A перемещается в дистальном направлении DD, а торцевая часть кабеля 434B перемещается в проксимальном направлении PD. При повороте шкива третьего привода 432 в противоположном направлении поворота торцевая часть кабеля 434A перемещается в проксимальном направлении PD, а торцевая часть кабеля 434B перемещается в дистальном направлении DD.
Монтажная часть для инструмента 300, показанная на ФИГ. 5 и 11-16, включает четвертую приводную систему 450, которая выполнена с возможностью приема соответствующего «четвертого» поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10 и преобразования данного четвертого поворотного выходного движения в четвертое поворотное управляющее движение. Четвертая приводная система 450 содержит шкив четвертого привода 452, соединенный с соответствующим четвертым из ведомых дисков, или элементов 306, на стороне держателя 316 на монтажной пластине для инструмента 304, монтажная часть для инструмента 300 соединена с узлом привода инструмента 110. См. ФИГ. 10. Шкив четвертого привода 452 выполнен с возможностью сообщения четвертого поворотного управляющего движения (в ответ на соответствующие поворотные выходные движения, сообщенные ему роботизированной системой 10) соответствующему кабелю четвертого привода 454, который можно использовать для сообщения различных управляющих или манипуляционных движений концевому эффектору, функционально соединенному с узлом стержня 200. Как преимущественно показано на ФИГ. 11 и 12, кабель четвертого привода 454 охватывает шпиндельный узел четвертого привода 456. Шпиндельный узел четвертого привода 456 шарнирно установлен на монтажной пластине для инструмента 304, и между узлом шпинделя четвертого привода 456 и монтажной пластиной для инструмента 304 установлена четвертая натяжная пружина 458, чтобы сохранялся требуемый уровень натяжения кабеля четвертого привода 454. Торцевая часть 454A кабеля четвертого привода 454 проходит вокруг нижней части сложного блока 440, прикрепленного к монтажной пластине для инструмента 304, а торцевая часть кабеля 454B проходит вокруг шпули или четвертой стойки 462 сложного блока 440. Следует понимать, что сообщение поворотного выходного движения от узла привода инструмента 110 в одном направлении приведет к повороту шкива четвертого привода 452 в первом направлении, в результате чего торцевые части кабеля 454A и 454B будут перемещаться в противоположных направлениях, сообщая управляющие движения концевому эффектору или узлу удлиненного стержня 200, как более подробно описано ниже. Таким образом, при повороте шкива четвертого привода 434 в первом направлении поворота торцевая часть кабеля 454A перемещается в дистальном направлении DD, а торцевая часть кабеля 454B перемещается в проксимальном направлении PD. При повороте шкива четвертого привода 452 в противоположном направлении поворота торцевая часть кабеля 454A перемещается в проксимальном направлении PD, а торцевая часть кабеля 454B перемещается в дистальном направлении DD.
Хирургический инструмент 100, показанный на ФИГ. 5, включает шарнирное сочленение 700. В таком варианте осуществления третья приводная система 430 может также называться «первой системой привода шарнира», а четвертая приводная система 450 может называться «второй системой привода шарнира». Аналогично кабель третьего привода 434 может называться «первым проксимальным кабелем шарнира», а кабель четвертого привода 454 может называться «вторым проксимальным кабелем шарнира».
Монтажная часть для инструмента 300 варианта осуществления, показанного на ФИГ. 5 и 11-16, включает пятую приводную систему, по существу обозначенную элементом 470, которая выполнена с возможностью перемещения по оси узла приводного штока 490. Узел приводного штока 490 включает проксимальный сегмент приводного штока 492, проходящий через проксимальный сегмент приводного стержня 380, и узел приводного стержня 388. См. ФИГ. 13. Пятая приводная система 470 включает приводную направляющую траверсу с возможностью перемещения 472, которая поддерживается с возможностью скольжения на монтажной пластине для инструмента 304. Проксимальный сегмент приводного штока 492 поддерживается в приводной направляющей траверсе 372 и имеет на себе пару шаровых ограничителей 394, расположенных таким образом, чтобы смещение приводной направляющей траверсы 372 на монтажной пластине для инструмента 304 приводило к осевому перемещению проксимального сегмента приводного штока 492. По меньшей мере в одном примере формы пятая приводная система 370 дополнительно включает приводной соленоид 474, функционально взаимодействующий с приводной направляющей траверсой 472. Приводной соленоид 474 принимает управляющее питание от роботизированного контроллера 12. Активация приводного соленоида 474 в первом направлении вызовет перемещение узла приводного штока 490 в дистальном направлении DD, а активация приводного соленоида 474 во втором направлении вызовет перемещение узла приводного штока 490 в проксимальном направлении PD. Как показано на ФИГ. 5, концевой эффектор 1000 включает часть упора, которая выполнена с возможностью перемещения между открытым и закрытым положениями при сообщении осевых закрывающих движений закрывающей системе. В варианте осуществления, показанном на ФИГ. 5 и 11-16, пятая приводная система 470 используется для генерирования таких закрывающих движений. Таким образом, пятая приводная система 470 также может называться «закрывающим шкивом».
Вариант осуществления, показанный на ФИГ. 5, включает хирургический концевой эффектор 1000, прикрепленный к монтажной части для инструмента 300 узлом удлиненного стержня 200. В показанном варианте осуществления узел удлиненного стержня включает соединительную конфигурацию в форме конфигурации с возможностью быстрой разборки или соединения 210, обеспечивающего быстрое прикрепление дистальной части 230 узла стержня 200 к проксимальной стержневой части 201 узла стержня 200. Соединение с возможностью быстрой разборки 210 способствует быстрому прикреплению и отсоединению множества передаточных компонентов, обеспечивающих передачу управляющих движений от источника приводных движений к функционально соединенному с ним концевому эффектору. В варианте осуществления, показанном, например, на ФИГ. 5 и 19, соединение с возможностью быстрой разборки 210 используется для соединения дистальной части стержня 230 концевого эффектора 1000 с проксимальной частью стержня 201.
Как показано на ФИГ. 19-23, соединительная конфигурация или соединение с возможностью быстрой разборки 210 включает проксимальный соединительный элемент 212, который выполнен с возможностью функционально поддерживать проксимальные передаточные узлы, и дистальный соединительный элемент 232, который выполнен с возможностью функционально поддерживать по меньшей мере один и предпочтительно множество дистальных передаточных узлов. В варианте осуществления, показанном на ФИГ. 5 и 19, третья приводная система 430 (т.е. первая система привода шарнира) и четвертая приводная система 450 (т.е. вторая система привода шарнира) применяются для сообщения шарнирных движений шарнирному сочленению 700. Например, третья приводная система 430 служит для сообщения управляющих движений первому проксимальному шарнирно поворачивающемуся кабелю 434, содержащему торцевые части 434A, 434B, для шарнирного поворота концевого эффектора 1000 в первом и втором направлениях шарнирного поворота в шарнирном сочленении 700. Аналогично четвертая приводная система 450 служит для сообщения управляющих движений второму проксимальному шарнирно поворачивающемуся кабелю 454, содержащему торцевые части 454A, 454B, для шарнирного поворота концевого эффектора 1000 в третьем и четвертом направлениях шарнирного поворота.
Как показано на ФИГ. 20, проксимальный соединительный элемент 212 имеет в себе первую пару диаметрально противоположных первых пазов 214 и имеет в себе вторую пару диаметрально противоположных вторых пазов 218 (на ФИГ. 20 показан только один паз 218). В каждом из противоположных первых пазов 214 поддерживается первая проксимальная шарнирная конструкция или звено 222. В каждом из противоположных вторых пазов 218 поддерживается вторая проксимальная шарнирная конструкция или звено 226. Торцевая часть кабеля 434A проходит через паз в одном из проксимальных шарнирных звеньев 222 и прикрепляется к нему. Аналогично торцевая часть кабеля 434B проходит через паз в другом проксимальном шарнирном звене 222 и прикрепляется к нему. Торцевая часть кабеля 434A и соответствующая ей проксимальная шарнирная конструкция или звено 222, а также торцевая часть кабеля 434B и соответствующая ей проксимальная шарнирная конструкция или звено 222 в совокупности называются «первым проксимальным шарнирным передаточным узлом» 217. Торцевая часть кабеля 454A проходит через паз в одном из проксимальных шарнирных звеньев 226 и прикрепляется к нему. Торцевая часть кабеля 454B проходит через паз в другом проксимальном шарнирном звене 226 и прикрепляется к нему. Торцевая часть кабеля 454A и соответствующая ей проксимальная шарнирная конструкция или звено 226, а также концевая часть кабеля 454B и соответствующая ей проксимальная шарнирная конструкция или звено 226 в совокупности называются «вторым проксимальным шарнирным передаточным узлом» 221.
Как показано на ФИГ. 21, дистальная часть стержня 230 включает дистальную часть внешней трубки 231, поддерживающую дистальный соединительный элемент 232. Дистальный соединительный элемент 232 имеет в себе первую пару диаметрально противоположных первых пазов 234 и имеет в себе вторую пару диаметрально противоположных вторых пазов 238. См. ФИГ. 20. В противоположных первых пазах 234 поддерживается первая пара проксимальных шарнирных конструкций или звеньев 242. Во второй паре пазов 238 поддерживается вторая пара дистальных шарнирных конструкций или звеньев 246. Первый дистальный сегмент кабеля 444 проходит через один из первых пазов 234 и паз в одном из дистальных шарнирных звеньев 242, к которому он прикрепляется. Основной дистальный сегмент кабеля 445 проходит через другой из первых пазов 234 и паз в другом дистальном шарнирном звене 242, к которому он прикрепляется. Первый дистальный сегмент кабеля 444 и соответствующее дистальное шарнирное звено 242, а также основной дистальный сегмент кабеля 445 и соответствующее дистальное шарнирное звено 242 в совокупности называются «первым дистальным шарнирным передаточным узлом» 237. Второй дистальный сегмент кабеля 446 проходит через один из вторых пазов 238 и паз в одном из дистальных шарнирных звеньев 246, к которому он прикрепляется. Вторичный дистальный сегмент кабеля 447 проходит через другой второй паз 238 и паз в другом дистальном шарнирном звене 246, к которому он прикрепляется. Второй дистальный сегмент кабеля 446 и соответствующее дистальное шарнирное звено 246, а также вторичный дистальный сегмент кабеля 447 и соответствующее дистальное шарнирное звено 246 в совокупности называются «вторым дистальным шарнирным передаточным узлом» 241.
Каждое из проксимальных шарнирных звеньев 222 имеет зубчатый конец 224, образованный на его пружинном рычаге 223. Каждое из проксимальных шарнирных звеньев 226 имеет зубчатый конец 227, образованный на его пружинном рычаге 227. Каждое дистальное шарнирное звено 242 имеет зубчатый конец 243 выполненный с возможностью зубчатого соединения с зубчатым концом 224 соответствующего звена из проксимальных шарнирных звеньев 222. Каждое дистальное шарнирное звено 246 имеет зубчатый конец 247 выполненный с возможностью зубчатого соединения с зубчатым концом 228 соответствующего проксимального шарнирного звена 226. Когда проксимальные шарнирные конструкции или звенья 222, 226 зубчато соединяются с дистальными шарнирными звеньями 242, 246 соответственно, первый и второй проксимальные передаточные шарнирные узлы 217 и 221 функционально соединяются с первым и вторым дистальными передаточными шарнирными узлами 237 и 241 соответственно. Таким образом, активация третьей и четвертой приводных систем 430, 450 сообщит пусковые движения на дистальные сегменты кабелей 444, 445, 446, 447, как более подробно описано ниже.
В варианте осуществления, показанном на ФИГ. 19-23, дистальный конец 250 проксимального сегмента внешней трубки 202 имеет в себе ряд пружинных пальцев 252, которые проходят дистально в пазы 254, выполненные с возможностью принимать в себя соответствующие части пружинных рычагов 223, 227. См. ФИГ. 21 (часть пружинного рычага 227 не показана на ФИГ. 21, но показана на ФИГ. 20). Каждый пружинный палец 252 имеет в себе стопор 256, выполненный с возможностью зацепления соответствующих лунок 258, образованных в проксимальных шарнирных звеньях 222, 226, когда проксимальные шарнирные звенья 222, 226 находятся в нейтральном положении (ФИГ. 23). Когда врачу необходимо отсоединить или прикрепить концевой эффектор 1000 к проксимальной части стержня 201, третью и четвертую приводные системы 430, 450 устанавливают в нейтральные неактивированные положения.
Проксимальный соединительный элемент 212 и дистальный соединительный элемент 232 соединения с возможностью быстрой разборки 210 функционально поддерживают соответствующие части соединительного узла приводного элемента 500 для разъемного соединения проксимального сегмента приводного штока 492 с дистальным сегментом приводного штока 520. Проксимальный сегмент приводного стержня 492 содержит проксимальный осевой передаточный узел 496, а дистальный сегмент приводного стержня 520 содержит дистальный осевой передаточный узел 528. Соединительный узел приводного элемента 500 содержит соединительный элемент или конструкцию приводного штока 502, которая содержит приемную конструкцию или первый магнит 504, такой как, например, магнит из редкоземельных элементов и т.п., прикрепленный к дистальному концу 493 дистального сегмента приводного штока 520. Первый магнит 504 имеет образованную в нем приемную полость 506 для приема второй конструкции или дистального магнита 510. Как показано на ФИГ. 21, дистальный магнит 510 прикреплен к конусообразному монтажному элементу 512, который прикреплен к проксимальному концу 522 дистального приводного штока 520.
Проксимальный соединительный элемент 212 и дистальный соединительный элемент 232 соединения с возможностью быстрой разборки 210 функционально поддерживают другие соответствующие части соединительного узла приводного элемента 500 для разъемного соединения проксимального сегмента приводного стержня 380 с дистальным сегментом приводного стержня 540. Проксимальный сегмент приводного стержня 380 по меньшей мере в одном примере формы содержит проксимальный поворотный передаточный узел 387, а дистальный сегмент приводного стержня 540 содержит дистальный поворотный передаточный узел 548. Когда проксимальный поворотный передаточный узел 387 функционально соединен с дистальным поворотным передаточным узлом 548, узел приводного стержня 388 позволяет передавать поворотные управляющие движения на концевой эффектор 1000. В показанном примере осуществления проксимальный конец 542 дистального сегмента приводного стержня 540 имеет множество (например, четыре, на ФИГ. 21 показаны только две) образованных на нем конструкций или зацепных пальцев 544. Каждый зацепной палец 544 имеет образованный на нем крепежный зацеп 546, выполненный с возможностью приниматься в соответствующие блокирующие конструкции или отверстия или пазы 383 в дистальном конце 381 проксимального сегмента приводного стержня 380. Пальцы 544 проходят через упрочняющее кольцо 545, установленное на проксимальный конец 542 дистального сегмента приводного стержня 540.
В варианте осуществления, показанном на ФИГ. 19-23, соединительный узел приводного элемента 500 дополнительно включает разблокирующую трубку 514, способствующую расцеплению первого и второго магнитов 504, 510, когда врач отсоединяет концевой эффектор 1000 от проксимальной части стержня 201 хирургического инструмента 100. Разблокирующая трубка 514 проходит через проксимальный сегмент приводного стержня 380, и ее проксимальный конец 517 выступает из проксимального конца 385 проксимального сегмента приводного стержня 380, как показано на ФИГ. 19. Разблокирующая трубка 514 имеет такой размер относительно проксимального сегмента приводного стержня 380, чтобы ее можно было перемещать в нем по оси при сообщении разблокирующего движения UL ее проксимальному концу 517. Рукоятка (не показана) прикрепляется к проксимальному концу 517 разблокирующей трубки и обеспечивает сообщение вручную разблокирующего движения UL разблокирующей трубке 514 или разблокирующего движения UL. В других вариантах осуществления, которые иным образом идентичны варианту осуществления, показанному на ФИГ. 19-23, для сообщения разблокирующего движения используется разблокирующий соленоид (не показан), который прикрепляется к монтажной пластине для инструмента 304 и запитывается роботизированным контроллером 12 или прикрепленной к нему отдельной аккумуляторной батареей.
В показанном примере осуществления соединительная конфигурация или соединение с возможностью быстрой разборки 210 также включает внешнее блокирующее кольцо 260, установленное с возможностью скольжения на дистальный конец 204 проксимальной части внешней трубки 202. Внешнее блокирующее кольцо 260 содержит четыре выступающих внутрь стопора 262, которые проходят в один из соответствующих пазов 254 в проксимальной части внешней трубки 202. Применение соединения с возможностью быстрой разборки 210 будет понятно со ссылкой на ФИГ. 21-23. На ФИГ. 21 представлены состояния проксимальной части стержня 201 и дистальной части стержня 230 перед их соединением друг с другом. Как показано на данной фигуре, пружинные рычаги 223, 227 проксимальных шарнирных звеньев 224, 226 соответственно естественным образом радиально отогнуты наружу. Блокирующее кольцо 260 передвинуто в самое проксимальное положение на проксимальной внешней трубке 202, причем стопоры 262 находятся на проксимальном конце пазов 254 в ней. Когда врачу необходимо прикрепить концевой эффектор 1000 к проксимальной части стержня 201 хирургического инструмента 100, врач выравнивает в аксиальном направлении дистальную часть стержня 230 с проксимальной частью стержня 201 и вводит их в соединительное зацепление друг с другом, как показано на ФИГ. 22. Как показано на фигуре, дистальный магнит 510 входит внутрь полости 506 в муфте приводного штока 502 и магнитно прикрепляется к проксимальному магниту 504, тем самым соединяя дистальный сегмент приводного штока 520 с проксимальным сегментом приводного штока 492. В результате данного действия дистальный осевой передаточный узел 528 функционально соединяется с проксимальным осевым передаточным узлом 496. Кроме того, при соединении вместе частей стержня 201, 230 зацепные пальцы 544 загибаются внутрь, пока образованные на них зацепы 546 не войдут в блокирующие отверстия 383 в дистальной торцевой части 381 проксимального сегмента приводного стержня 380. Когда зацепы 546 входят внутрь соответствующих блокирующих отверстий 383, дистальный сегмент приводного стержня 540 соединяется с проксимальным сегментом приводного стержня 380. Таким образом, в результате данного действия дистальный поворотный передаточный узел 548 функционально соединяется с проксимальным поворотным передаточным узлом 387. Когда дистальный соединительный элемент 232 и проксимальный соединительный элемент 212 выравниваются в аксиальном направлении и вводятся в зацепление, как описано выше, и блокирующее кольцо 260 перемещается в самое проксимальное положение на проксимальной внешней трубке 202, дистальные передаточные узлы по существу функционально соединяются с проксимальными передаточными узлами.
Когда врачу необходимо отсоединить концевой эффектор 1000 от проксимальной части стержня 201 хирургического инструмента 100, врач возвращает третью и четвертую приводные системы 430, 450 в их нейтральные положения. Затем врач может переместить блокирующее кольцо 260 проксимально по проксимальному сегменту внешней трубки 202 в исходное положение, показанное на ФИГ. 22. В данном положении пружинные рычаги проксимальных шарнирных звеньев 222, 226 воздействуют на их зубчатые части таким образом, что они расцепляются с зубчатыми частями дистальных шарнирных звеньев 242, 246. Затем врач может сообщить разблокирующее движение UL проксимальному концу 517 разблокирующей трубки 514, чтобы переместить разблокирующую трубку 514 и прикрепленное к ней разблокирующее кольцо 516 в дистальном направлении DD. При дистальном перемещении разблокирующего кольца 516 оно смещает зацепные пальцы 544 из зацепления с их соответствующими отверстиями 383 в дистальной торцевой части 381 проксимального сегмента приводного стержня 380 и контактирует с конусообразной монтажной частью 512, выводя дистальный магнит 510 из магнитного зацепления с проксимальным магнитом 504.
На ФИГ. 22A, 23A и 23B представлена альтернативная соединительная конфигурация или узел соединения с возможностью быстрой разборки 210'', аналогичного соединению с возможностью быстрой разборки 210, описанному выше, за исключением того, что в нем используется электромагнит 504' для соединения дистального сегмента приводного штока 520 с проксимальным сегментом приводного штока 492'. Как показано на данных фигурах, проксимальный сегмент приводного штока 492' является полым для введения в него проводников 505, проходящих от источника электрического питания, находящегося в роботизированной системе 10. Проводники 505 навиты на кусок железа 508. Когда врач вводит дистальную часть стержня 230 в зацепление с проксимальной частью стержня 201, как показано на ФИГ. 22A, по проводникам 505 можно пропустить электрический ток в первом направлении, в результате чего магнит 504' притягивает магнит 510 в соединительное зацепление, как показано на ФИГ. 23A. Когда врачу необходимо отсоединить концевой эффектор 1000 от проксимальной части стержня 201 хирургического инструмента 100, врач возвращает третью и четвертую приводные системы 430, 450 в их нейтральные положения. Затем врач может переместить блокирующее кольцо 260 проксимально по проксимальному сегменту внешней трубки 202 в исходное положение, показанное на ФИГ. 22А. В данном положении пружинные рычаги проксимальных шарнирных звеньев 222, 226 воздействуют на их зубчатые части таким образом, что они расцепляются с зубчатыми частями дистальных шарнирных звеньев 242, 246. Затем врач может сообщить разблокирующее движение UL проксимальному концу 517 разблокирующей трубки 514, чтобы переместить разблокирующую трубку 514 и прикрепленное к ней разблокирующее кольцо 516 в дистальном направлении DD. Кроме того, можно пропустить электрический ток по проводникам 505 в противоположном направлении, вызывая отталкивание электромагнитом 504' магнита 510, чтобы обеспечить разделение сегментов стержня. Когда врач перемещает разблокирующую трубку дистально, разблокирующее кольцо 516 выводит зацепные пальцы 544 из зацепления с соответствующими отверстиями 383 в дистальной торцевой части 381 проксимального сегмента приводного стержня 380 и контактирует с конусообразной монтажной частью 512 для дополнительного разделения сегментов стержня.
Описанные выше соединительные конфигурации или соединительные узлы с возможностью быстрой разборки могут обеспечивать множество преимуществ. Например, в таких конфигурациях могут использоваться единственные отсоединяющие/зацепляющие движения, которые не допускают полузацепленного состояния. Такие зацепляющие движения можно использовать для одновременного функционального соединения нескольких передаточных узлов, причем по меньшей мере некоторые передаточные узлы создают управляющие движения, отличающиеся от управляющих движений, создаваемых другими передаточными узлами. Например, некоторые передаточные узлы могут обеспечивать поворотные управляющие движения и могут быть выполнены с возможностью продольного смещения с созданием осевых управляющих движений, а некоторые могут обеспечивать только поворотные или осевые управляющие движения. Другие передаточные узлы могут обеспечивать толкающие/тянущие движения для управления различными системами/компонентами концевого эффектора. Уникальная и новая конфигурация блокирующего кольца гарантирует, что дистальные передаточные узлы фиксировано соединены с соответствующими проксимальными передаточными узлами или разблокированы и могут быть отделены друг от друга. При фиксированном соединении все передаточные узлы радиально поддерживаются блокирующим кольцом, которое не дает им отсоединиться.
Хирургический инструмент 100, представленный на ФИГ. 5 и 11-16, включает шарнирное сочленение 700, которое, действуя совместно с третьей и четвертой приводными системами 430, 450 соответственно, шарнирно поворачивает концевой эффектор 1000 вокруг продольной оси инструмента LT. Шарнирное сочленение 700 включает проксимальную гнездовую трубку 702, прикрепленную к дистальному концу 233 дистальной части внешней трубки 231 и образующую в ней проксимальное шаровое гнездо 704. См. ФИГ. 25. Внутри проксимального шарового гнезда 704 размещен с возможностью перемещения проксимальный шаровой элемент 706. Как показано на ФИГ. 25, проксимальный шаровой элемент 706 имеет центральный канал для привода 708, позволяющий дистальному сегменту приводного стержня 540 проходить через него. Кроме того, проксимальный шаровой элемент 706 имеет в себе четыре шарнирных канала 710, способствующие введению через них дистальных сегментов кабелей 444, 445, 446, 447. Как также показано на ФИГ. 25, шарнирное сочленение 700 дополнительно включает промежуточный сегмент шарнирной трубки 712, который имеет образованное в нем промежуточное шаровое гнездо 714. Промежуточное шаровое гнездо 714 выполнено с возможностью поддержки в себе с возможностью перемещения шара 722 концевого эффектора, образованного на соединительной трубке концевого эффектора 720. Дистальные сегменты кабелей 444, 445, 446, 447 проходят через каналы для кабелей 724, образованные в шаре 722 концевого эффектора и прикрепляются к нему утолщениями 726, которые принимаются в соответствующие каналы 728 в шаре 722 концевого эффектора. Можно использовать и другие крепежные конфигурации для прикрепления дистальных сегментов кабелей 444, 445, 446, 447 к шару 722 концевого эффектора.
На ФИГ. 26 и 27 представлен уникальный и новый поворотный опорно-соединительный узел, по существу обозначенный элементом 740. Показанный поворотный опорно-соединительный узел 740 включает соединительную часть 1012 корпуса привода концевого эффектора 1010, которая имеет по существу цилиндрическую форму. По периметру цилиндрической соединительной части 1012 образована первая кольцеобразная канавка 1014. Поворотный опорно-соединительный узел 740 дополнительно содержит дистальную гнездовую часть 730, образованную в соединительной трубке концевого эффектора 720, как показано на ФИГ. 26 и 27. Дистальная гнездовая часть 730 имеет такой размер относительно цилиндрической соединительной части 1012, что соединительная часть 1012 может свободно поворачиваться внутри гнездовой части 730. Во внутренней стенке 731 дистальной гнездовой части 730 образована вторая кольцеобразная канавка 732. В дистальной гнездовой части 730 предусмотрено окошко 733, сообщающееся со второй кольцеобразной канавкой 732 в ней. Как показано на ФИГ. 26 и 27, поворотный опорно-соединительный узел 740 дополнительно включает кольцеобразный подшипник 734. В различных примерах осуществления кольцеобразный подшипник 734 представляет собой способное к пластической деформации по существу круговое кольцо, имеющее в себе вырез 735. Вырез формирует свободные концы 736, 737 в кольцеобразном подшипнике 734. Как показано на ФИГ. 26, кольцеобразный подшипник 734 в своем естественном несмещенном состоянии имеет по существу кольцевую форму.
Чтобы соединить хирургический концевой эффектор 1000 (например, первую часть хирургического инструмента) с шарнирным сочленением 700 (например, второй частью хирургического инструмента), цилиндрическую соединительную часть 1012 вставляют в дистальную гнездовую часть 730, приводя вторую кольцеобразную канавку 732 по существу в совмещение с первой кольцеобразной канавкой 1014. Затем один из свободных концов 736, 737 кольцеобразного подшипника вставляют в совмещенные кольцеобразные канавки 1014, 732 через окошко 733 в дистальной гнездовой части 730 соединительной трубки концевого эффектора 720. Для обеспечения простоты вставки окошко или отверстие 733 имеет образованную на нем сужающуюся поверхность 738. См. ФИГ. 26. Кольцеобразный подшипник 734 по существу поворачивают на место, и, поскольку он стремится сформировать круг или кольцо, после вставки он не будет стремиться выйти обратно через окошко 733. После вставки кольцеобразного подшипника 734 в совмещенные кольцеобразные канавки 1014, 732, соединительная трубка концевого эффектора 720 будет закреплена с возможностью поворота на соединительной части 1012 корпуса привода концевого эффектора 1010. Такая конфигурация позволяет корпусу привода концевого эффектора 1010 поворачиваться вокруг продольной оси инструмента LT-LT относительно соединительной трубки концевого эффектора 720. Кольцеобразный подшипник 734 становится рабочей поверхностью, на которой затем будет поворачиваться корпус привода концевого эффектора 1010. Любая боковая нагрузка будет стремиться деформировать кольцеобразный подшипник 734, который поддерживается и находится внутри двух сцепленных канавок 1014, 732, предотвращающих повреждение кольцеобразного подшипника 734. Следует понимать, что такой простой и эффективный соединительный узел, содержащий кольцеобразный подшипник 734, образует очень гладкую поверхность взаимодействия между поворачиваемыми частями 1010, 730. Если в течение сборки один из свободных концов 736, 737 выйдет из окошка 733 (см., например, ФИГ. 27), то поворотный опорно-соединительный узел 740 можно разобрать, вытащив кольцеобразный подшипник 732 из окошка 733. Поворотный опорно-соединительный узел 740 предусматривает легкую сборку и производство, а также обеспечивает хорошую поддержку концевому эффектору и позволяет поворотно манипулировать им.
Шарнирное сочленение 700 обеспечивает шарнирный поворот концевого эффектора 1000 вокруг продольной оси инструмента LT. Например, если необходимо шарнирно повернуть концевой эффектор 1000 в первом направлении FD, как показано на ФИГ. 5, роботизированная система 10 может активировать третью приводную систему 430, так чтобы шпиндельный узел третьего привода 436 (ФИГ. 11-13) поворачивался в первом направлении, тем самым перемещая проксимальную торцевую часть кабеля 434A и в конечном счете дистальный сегмент кабеля 444 в проксимальном направлении PD, а также ослабляя проксимальную торцевую часть кабеля 434B и дистальный сегмент кабеля 445, таким образом вызывая поворот шара 722 концевого эффектора внутри гнезда 714. Аналогично, чтобы шарнирно повернуть концевой эффектор 1000 во втором направлении SD, противоположном первому направлению FD, роботизированная система 10 может включить третью приводную систему 430, так чтобы шпиндельный узел третьего привода 436 поворачивался во втором направлении, тем самым перемещая проксимальную торцевую часть кабеля 434В и в конечном счете дистальный сегмент кабеля 445 в проксимальном направлении PD, а также ослабляя проксимальную торцевую часть кабеля 434А и дистальный сегмент кабеля 444, таким образом вызывая поворот шара 722 концевого эффектора внутри гнезда 714. Если необходимо шарнирно повернуть концевой эффектор 1000 в третьем направлении TD, как показано на ФИГ. 5, роботизированная система 10 может включить четвертую приводную систему 450, так чтобы шпиндельный узел четвертого привода 456 поворачивался в третьем направлении, тем самым перемещая проксимальную торцевую часть кабеля 454A и в конечном счете дистальный сегмент кабеля 446 в проксимальном направлении PD, а также ослабляя проксимальную торцевую часть кабеля 454B и дистальный сегмент кабеля 447, таким образом вызывая поворот шара 722 концевого эффектора внутри гнезда 714. Аналогично, чтобы шарнирно повернуть концевой эффектор 1000 в четвертом направлении FTH, противоположном третьему направлению TD, роботизированная система 10 может включить четвертую приводную систему 450, так чтобы шпиндельный узел четвертого привода 456 поворачивался в четвертом направлении, тем самым перемещая проксимальную торцевую часть кабеля 454В и в конечном счете дистальный сегмент кабеля 447 в проксимальном направлении PD, а также ослабляя проксимальную торцевую часть кабеля 454А и дистальный сегмент кабеля 446, таким образом вызывая поворот шара 722 концевого эффектора внутри гнезда 714.
В варианте осуществления, показанном на ФИГ. 5 и 11-16, используются поворотные и продольные движения, которые в целях активации передаются от монтажной части для инструмента 300 через узел удлиненного стержня. Узел приводного стержня, использованный для передачи таких поворотных и продольных движений (например, крутящих, натягивающих и сжимающих движений) к концевому эффектору, является относительно гибким, чтобы обеспечивать поворот концевого эффектора вокруг шарнирного сочленения. На ФИГ. 28 и 29 представлен альтернативный узел приводного стержня 600, который можно использовать в сочетании с вариантом осуществления, показанным на ФИГ. 5 и 11-16, или в других вариантах осуществления. В варианте осуществления, представленном на ФИГ. 5, в котором используется соединение с возможностью быстрой разборки 210, проксимальный сегмент приводного стержня 380 представляет собой сегмент узла приводного стержня 600, а дистальный сегмент приводного стержня 540 аналогичным образом представляет собой другой сегмент узла приводного стержня 600. Узел приводного стержня 600 включает приводную трубку 602, имеющую ряд вырезанных в ней кольцевых соединительных сегментов 604. В показанном варианте осуществления приводная трубка 602 содержит дистальную часть проксимального сегмента приводного стержня 380.
Приводная трубка 602 представляет собой полую металлическую трубку (из нержавеющей стали, титана и т.п.), содержащую ряд образованных в ней кольцевых соединительных сегментов 604. Кольцевые соединительные сегменты 604 содержат множество неплотно сцепленных форм типа «ласточкин хвост» 606, которые, например, вырезаны в приводной трубке 602 лазером, и служат для облегчения гибкого перемещения между соседними соединительными сегментами 604. См. ФИГ. 29. Такая лазерная резка заготовки трубки позволяет получить гибкую полую приводную трубку, которую можно использовать при сжимании, натягивании и скручивании. В такой конфигурации используют полные диаметральные вырезы, которые сцепляются со смежной частью в конфигурации, аналогичной частям пазла. Данные вырезы повторяются по длине полой трубки в ряд, иногда с поворотом для изменения характеристик натяжения или скручивания.
На ФИГ. 30-34 представлен альтернативный пример микрокольцевых соединительных сегментов 604', содержащих в себе множество вырезанных лазером форм 606', приблизительно напоминающих неплотно сцепленные противоположные Т-образные и T-образные с вырезом формы. Кольцевые соединительные сегменты 604, 604' по существу содержат множество микрошарнирных скручиваемых соединений. Таким образом, каждый соединительный сегмент 604, 604' может передавать крутящий момент, способствуя относительному шарнирному повороту между каждым кольцевым соединительным сегментом. Как показано на ФИГ. 30 и 31, соединительный сегмент 604D' на дистальном конце 603 приводной трубки 602 содержит часть дистального опорного кольца 608D, которая обеспечивает прикрепление к другим компонентам привода для активации концевого эффектора, или к частям соединения с возможностью быстрой разборки и т.п., а соединительный сегмент 604P' на проксимальном конце 605 приводной трубки 602 содержит часть проксимального опорного кольца 608P', обеспечивающую прикрепление к другим проксимальным компонентам привода или к частям соединения с возможностью быстрой разборки.
Диапазон движения между стыками в каждом конкретном узле приводного стержня 600 можно увеличить, увеличив интервал между лазерными вырезами. Например, чтобы соединительные сегменты 604' оставались соединенными и при этом существенно не снижалась способность приводной трубки к шарнирному повороту в желаемом диапазоне движения, используют вторичный ограничительный элемент 610. В варианте осуществления, показанном на ФИГ. 32 и 33, вторичный ограничительный элемент 610 содержит пружину 612 или иной спирально извитый элемент. В различных примерах осуществления дистальный конец 614 пружины 612 соответствует части дистального опорного кольца 608D и имеет более тугую намотку, чем центральная часть 616 пружины 612. Аналогично проксимальный конец 618 пружины 612 имеет более тугую намотку, чем центральная часть 616 пружины 612. В других вариантах осуществления ограничительный элемент 610, установленный на приводную трубку 602, имеет желаемый шаг, так что ограничительный элемент также функционирует, например, в качестве гибкой приводной резьбы для резьбового зацепления других резьбовых управляющих компонентов на концевом эффекторе и/или системе управления. Также следует понимать, что ограничительный элемент можно установить таким образом, чтобы он имел изменяемый шаг в целях передачи желаемых поворотных управляющих движений при повороте узла приводного стержня. Например, конфигурацию ограничительного элемента с изменяемым шагом можно использовать для усиления открывающих/закрывающих и пусковых движений, что будет более благоприятным решением, чем изменение числа линейных тактов при одном и том же поворотном движении. В других вариантах осуществления узел приводного стержня, например, содержит резьбу с изменяемым шагом на полом гибком приводном стержне, который можно толкать или тянуть в пределах 90-градусного изгиба. В других вариантах осуществления вторичный ограничительный элемент представляет собой эластомерную трубку или покрытие 611, нанесенное на внешнюю поверхность или периметр приводной трубки 602, как показано на ФИГ. 34А. В другом варианте осуществления эластомерную трубку или покрытие 611' вводят в полый канал 613, образованный внутри приводной трубки 602, как показано на ФИГ. 34B.
Такие конфигурации приводного стержня представляют собой композитную скручивающуюся приводную ось, обеспечивающую прекрасную передачу нагрузки и желаемый диапазон осевых шарнирных поворотов. См., например, ФИГ. 34 и 34A-B. Таким образом, данные композитные узлы приводного стержня обеспечивают широкий диапазон движения при сохранении способности к передаче крутящего момента в обоих направлениях, а также передачу натяжных и сжимающих управляющих движений через них. Кроме того, полый характер таких конфигураций приводного стержня позволяет проводить через них другие управляющие компоненты при обеспечении улучшенной нагрузки по натяжению. Например, некоторые другие варианты осуществления включают гибкий внутренний кабель, который проходит через узел приводного стержня, который помогает выровнять соединительные сегменты и обеспечить возможность сообщения натягивающих движений через узел приводного стержня. Более того, такие конфигурации приводного стержня относительно просты в производстве и сборке.
На ФИГ. 35-38 представлен сегмент 620 узла приводного стержня 600'. Данный вариант осуществления включает соединительные сегменты 622, 624, вырезанные лазером из материала заготовки трубки (например, нержавеющей стали, титана, полимера и т.п.). Соединительные сегменты 622, 624 остаются неплотно соединенными, поскольку вырезы 626 расположены радиально и несколько сужаются. Например, каждая из утолщенных частей 628 имеет суженную часть 629 на внешнем периметре, которую принимает гнездо 630, имеющее суженную часть на внутренней стенке. См., например, ФИГ. 36 и 38. Таким образом, для прикрепления друг к другу соединительных сегментов 622, 624 не требуется никакой сборки. Как показано на фигурах, соединительный сегмент 622 содержит противоположные поворотные утолщенные части 628, которые вырезаны на каждом из его концов, и шарнирно принимаются в соответствующие гнезда 630, образованные в смежных соединительных сегментах 624.
На ФИГ. 35-38 представлен небольшой сегмент узла приводного стержня 600'. Специалистам в данной области будет очевидно, что утолщения/гнезда могут быть вырезаны по всей длине узла приводного стержня. Таким образом, соединительные сегменты 624 могут содержать вырезанные в них противоположные гнезда 630, обеспечивающие создание рычажного механизма со смежными соединительными сегментами 622 по длине узла приводного стержня 600'. Кроме того, соединительные сегменты 624 могут иметь наклоненную торцевую часть 632, вырезанную в них для обеспечения шарнирного поворота соединительных сегментов 624 относительно соединительных сегментов 622, как показано на ФИГ. 37 и 38. В показанном варианте осуществления каждое утолщение 628 имеет ограничитель шарнирного поворота 634, выполненный с возможностью контакта с соответствующим ограничителем шарнирного поворота 636, образованном в соединительном сегменте 622. См. ФИГ. 37 и 38. Другие варианты осуществления, во всем прочем идентичные сегменту 620, не снабжены ограничителями шарнирного поворота 634 и ограничителями 636.
Как указано выше, диапазон движений между соединениями в каждом конкретном узле приводного стержня можно увеличить, увеличив интервал между лазерными вырезами. В таких вариантах осуществления для того, чтобы соединительные сегменты 622, 624 оставались соединенными и при этом существенно не снижалась способность приводной трубки к шарнирному повороту в желаемом диапазоне движений, используют вторичный ограничительный элемент в форме эластомерной гильзы или покрытия 640. В других вариантах осуществления можно использовать другие формы ограничительных элементов, описанных в настоящем документе, и эквивалентные им структуры. Как показано на ФИГ. 35, соединительные сегменты 622, 624 способны поворачиваться вокруг осей поворота PA-PA, образованных шарнирными утолщениями 628 и соответствующими гнездами 630. Для обеспечения расширенного диапазона шарнирного поворота узел приводного стержня 600' можно поворачивать вокруг оси инструмента TL-TL при повороте вокруг осей поворота PA-PA.
На ФИГ. 39-44 представлен сегмент 640 другого узла приводного стержня 600''. Узел приводного стержня 600'' представляет собой многосегментную приводную систему, которая включает множество соединенных друг с другом соединительных сегментов 642, образующих гибкую полую приводную трубку 602''. Соединительный сегмент 642 включает шаровую соединительную часть 644 и гнездовую часть 648. Каждый соединительный сегмент 642 можно произвести, например, при помощи литья под давлением из металла MIM из нержавеющей стали марок 17-4, 17-7, 420. Другие варианты осуществления можно произвести из нержавеющих сталей марок 300 или 400, алюминия марок 6065 или 7071 или титана. Другие варианты осуществления можно, например, отлить из пластика, содержащего или не содержащего наполнитель из нейлона, ультема, АБС-пластика, поликарбоната или полиэтилена. Как показано на фигурах, шаровой соединитель 644 имеет шестигранную форму. Таким образом, шаровой соединитель 644 имеет шесть образованных на нем дугообразных поверхностей 646 и выполнен с возможностью поворотного приема в имеющие соответствующую форму гнезда 650. Каждое гнездо 650 имеет шестигранную внешнюю часть 652, образованную шестью плоскими поверхностями 654, и внутреннюю часть 656 радиальной формы. См. ФИГ. 42. Каждый соединительный сегмент 642 имеет идентичную конструкцию, за исключением того, что гнездовые части последних соединительных сегментов, формирующих дистальный и проксимальный концы узла приводного стержня 600, могут быть выполнены с возможностью функционального совмещения с соответствующими управляющими компонентами. Каждый шаровой соединитель 644 имеет в себе полый канал 645, и каналы в совокупности образуют полый проход 603 через полую гибкую приводную трубку 602''.
Как показано на ФИГ. 43 и 44, соединенные друг с другом соединительные сегменты 642 находятся внутри ограничительного элемента 660, который содержит трубку или гильзу, произведенную, например, из гибкого полимерного материала. На ФИГ. 45 представлен гибкий внутренний элемент-сердечник 662, проходящий через соединенные друг с другом соединительные сегменты 642. Внутренний элемент-сердечник 662 представляет собой твердый элемент, произведенный из полимерного материала, или полую трубку или гильзу, произведенную из гибкого полимерного материала. На ФИГ. 46 представлен другой вариант осуществления, в котором используют как ограничительный элемент 660, так и внутренний элемент-сердечник 662.
Узел приводного стержня 600'' обеспечивает передачу поворотного и прямолинейного движения через шарнирное сочленение с изменяемым радиусом. Полая структура узла приводного стержня 600'' обеспечивает место для дополнительных управляющих компонентов или тянущего элемента (например, гибкого кабеля), обеспечивающих передачу натягивающих или сжимающих нагрузок. Однако в других вариантах осуществления соединительные сегменты 624 не предусматривают наличие полого канала в узле приводного стержня. В таких вариантах осуществления, например, шаровая соединительная часть является сплошной. Поворотное движение поступательно перемещается посредством краев шестигранных поверхностей. Более жесткие допустимые отклонения могут обеспечивать передачу больших усилий. При использовании кабеля или иного натяжного элемента, проходящего через центральную линию узла приводного стержня 600'', весь узел приводного стержня 600'' можно поворачивать в изогнутом, выдвинутом или втянутом виде без ограничений диапазона движений. Например, узел приводного стержня 600'' может образовывать дугообразную приводную траекторию, прямую приводную траекторию, извитую приводную траекторию и т.п.
На ФИГ. 5 и 47-54 представлен один хирургический концевой эффектор 1000, который можно эффективно использовать с роботизированной системой 10. Концевой эффектор 1000 содержит эндоскопический рассекатель 1002, имеющий первую браншу 1004 и вторую браншу 1006, выполненную с возможностью избирательного перемещения относительно первой бранши 1004. В варианте осуществления, представленном на ФИГ. 5 и 47-54, первая бранша 1004 содержит опорный элемент 1019 в форме удлиненного канала 1020, который выполнен с возможностью функционально поддерживать в себе кассету со скобами 1030. Вторая бранша 1006 содержит узел упора 1100. Как показано на ФИГ. 47, 49, 53 и 55, узел упора 1100 содержит основание упора 1102, которое имеет на нем поверхность для формирования скоб 1104. Основание упора 1102 содержит канал 1106, выполненный с возможностью совмещения с монтажными отверстиями 1022 в удлиненном канале 1020. Ось или шарнирный палец (не показан) вставляют через отверстия 1022 и канал 1104 для шарнирного соединения упора 1100 с удлиненным каналом 1020. Такая конфигурация позволяет узлу упора 1100 избирательно поворачиваться вокруг оси закрытия CA-CA, по существу перпендикулярной продольной оси инструмента LT-LT (ФИГ. 48), между открытым положением, при котором поверхность для формирования скоб 1104 отделена от платформы 1044 кассеты со скобами 1040 (ФИГ. 47-50), и закрытым положением (ФИГ. 51-54), при котором поверхность для формирования скоб 1104 на основании упора 1102 входит в контакт с платформой кассеты 1042.
В варианте осуществления, показанном на ФИГ. 5 и 47-54, используется закрывающий узел 1110, выполненный с возможностью принимать открывающие и закрывающие движения от пятой приводной системы 470. Пятая приводная система 470 служит для продвижения и втягивания по оси узла приводного штока 490. Как описано выше, узел приводного штока 490 включает проксимальный сегмент приводного штока 492, функционально взаимодействующий с приводным соленоидом 474, чтобы принимать от него осевые управляющие движения. Проксимальный сегмент приводного штока 492 соединен с дистальным сегментом приводного штока 520 при помощи соединительного элемента приводного штока 502. Дистальный сегмент приводного штока 520 имеет некоторую гибкость для облегчения шарнирного поворота концевого эффектора 1000 в шарнирном сочленении 700, а также для облегчения осевой передачи через него закрывающих и открывающих движений. Например, дистальный сегмент приводного штока 520 может содержать кабель или многослойную структуру из титана, нержавеющей рессорной стали или нитинола.
Закрывающий узел 1110' включает закрывающий рычажный механизм 1112', шарнирно прикрепленный к продольному каналу 1020. Как показано на ФИГ. 48, 51 и 52, закрывающий рычажный механизм 1112 имеет в себе отверстие 1114, через которое проходит дистальный конец 524 дистального сегмента приводного штока 520. Шар 526 или иную конструкцию прикрепляют к дистальному сегменту приводного штока 520, таким образом прикрепляя дистальный конец 524 дистального сегмента приводного штока 520 к закрывающему рычажному механизму 1112. Закрывающий узел 1110 дополнительно включает пару кулачковых дисков 1120, установленных с возможностью поворота на боковых сторонах удлиненного канала 1020. Один кулачковый диск 1120 поддерживается с возможностью поворота на одной боковой стороне удлиненного канала 1020, а другой кулачковый диск 1120 поддерживается с возможностью поворота на другой боковой стороне удлиненного канала 1020. См. ФИГ. 60. Пара поворотных звеньев 1122 прикреплена между каждым кулачковым диском 1120 и закрывающим рычажным механизмом 1112. Таким образом, поворотное движение закрывающего рычажного механизма 1112 узлом приводного штока 490 будет приводить к повороту кулачковых дисков 1120. Каждый кулачковый диск 1120 дополнительно имеет выступающий из него штифт активатора 1124, который принимается с возможностью скольжения в соответствующий криволинейный паз 1108 в основании упора 1102.
Ниже описана активация второй бранши 1006 или узла упора 1100. На ФИГ. 47-50 показан узел упора 1100 в открытом положении. После того как концевой эффектор 1000 будет размещен относительно ткани, которую необходимо разрезать и сшить, роботизированный контроллер 12 может активировать приводной соленоид 474 в первом или дистальном направлении DD, что в конечном итоге приводит к дистальному перемещению приводной направляющей траверсы 472, что вызывает перемещение узла приводного штока 490 в дистальном направлении DD. Такое перемещение узла приводного штока 490 приводит к дистальному перемещению дистального сегмента приводного штока 520, в результате чего закрывающий рычажный механизм 1112 поворачивается из открытого положения в закрытое положение (ФИГ. 51-54). Такое перемещение закрывающего рычажного механизма 1112 вызывает поворот кулачковых дисков 1120 в направлении против часовой стрелки CCW. При повороте кулачковых дисков в направлении против часовой стрелки CCW взаимодействие между штифтами активатора 1124 и соответствующим криволинейным пазом 1108 вызывает поворот узла упора 1100 в закрытое положение, накрывая целевую ткань. Чтобы освободить целевую ткань, приводной соленоид 474 активируют так, чтобы он вытягивал узел приводного штока 490 в проксимальном направлении PD, что приводит к обратному поворотному движению закрывающего рычажного механизма 1112 в открытое положение, в результате чего узел упора 1100 в конечном итоге снова поворачивается в открытое положение
На ФИГ. 55-59 представлена другая закрывающая система 670 для сообщения открывающих и закрывающих движений упору 1100. Как показано, например, на ФИГ. 56, закрывающая система 670 включает первый монтажный блок или элемент 672, который поддерживает с возможностью поворота первый сегмент закрывающего штока 680. Первый сегмент закрывающего штока 680 имеет по существу полукруговую форму в поперечном сечении. Проксимальный конец 682 первого сегмента закрывающего штока 680 содержит на себе первый шаровой соединитель 684, поддерживаемый с возможностью поворота в первом монтажном гнезде 673, образованном в монтажном блоке 672. Для облегчения шарнирного поворота концевого эффектора 1000 шарнирным сочленением 700 первый сегмент закрывающего штока 680 также содержит первую зазубренную часть 686, совмещающуюся с шарнирным сочленением 700, как показано на ФИГ. 58 и 59. Закрывающая система 670 дополнительно включает второй монтажный блок или элемент 674, поддерживающий с возможностью поворота второй сегмент закрывающего штока 690. Второй сегмент закрывающего штока 690 имеет по существу полукруговую форму в поперечном сечении. Проксимальный конец 692 второго сегмента закрывающего штока 690 имеет на себе второй шаровой соединитель 694, поддерживаемый с возможностью поворота во втором монтажном гнезде 675, образованном во втором монтажном блоке 674. Для облегчения шарнирного поворота концевого эффектора 1000 шарнирным сочленением 700 второй сегмент закрывающего штока 690 также содержит вторую зазубренную часть 696, совмещающуюся с шарнирным сочленением 700, как показано на ФИГ. 58 и 59.
Как также показано на ФИГ. 56, закрывающая система 670 дополнительно содержит первое поворотное звено 676, которое прикреплено к дистальному концу 682 первого сегмента закрывающего штока 680. Первое поворотное звено 676 имеет образованное на нем первое поворотное утолщение 677, выполненное с возможностью поддержки с возможностью поворота в первом гнезде 683, образованном в дистальном конце 682 первого сегмента закрывающего штока 680. Такая конструкция позволяет первому поворотному звену 676 поворачиваться относительно первого сегмента закрывающего штока 680. Аналогично второе поворотное звено 678 прикреплено к дистальному концу 691 второго сегмента закрывающего штока 690 таким образом, что может поворачиваться относительно него. Второе поворотное звено 678 имеет образованное на нем второе поворотное утолщение 1679, выполненное с возможностью прохождения через отверстие в первом поворотном утолщении 677 и с возможностью поддержки с возможностью поворота внутри второго гнезда 692 в дистальном конце 1691 второго сегмента закрывающего штока 690. Кроме того, как показано на ФИГ. 56, первое и второе поворотные звенья 676, 678 соединены друг с другом с возможностью перемещения клином 716 на втором поворотном звене 678, принимаемым с возможностью скольжения в паз 717 в первом поворотном звене 676. По меньшей мере в одном варианте осуществления первое поворотное звено 676 прикрепляется к каждому из кулачковых дисков 1120 первыми плечами рычажного механизма 687, а второе поворотное звено 678 прикрепляется к каждому из кулачковых дисков 1120 вторыми плечами рычажного механизма 688.
В показанном варианте осуществления закрывающая система 670 активируется приводным соленоидом 474. Приводной соленоид 474 выполнен с возможностью функционального взаимодействия с первым или вторым монтажными блоками 672, 674 для сообщения ему осевых закрывающих и открывающих движений. Как показано на ФИГ. 56-59, такая приводная конфигурация может дополнительно содержать узел первого поворотного звена и зубчатых колес 695, прикрепленный с возможностью перемещения к первому монтажному блоку 672 штифтом 685, входящим в паз 696 в узле первого поворотного звена и зубчатых колес 695. Аналогично узел второго поворотного звена и зубчатых колес 697 прикреплен с возможностью перемещения ко второму монтажному блоку 674 штифтом 685, входящим в паз 698 в узле второго поворотного звена и зубчатых колес 697. Узел первого поворотного звена и зубчатых колес 695 содержит первую коническую шестерню 699A, установленную на нем с возможностью поворота, а узел второго поворотного звена и зубчатых колес 697 содержит вторую коническую шестерню 699B, закрепленную на нем с возможностью поворота. Как первая, так и вторая конические шестерни 699A, 699B находятся в зубчатом зацеплении с промежуточной шестерней 689, установленной с возможностью поворота на монтажной пластине для инструмента 302. См. ФИГ. 59A. Таким образом, когда первый монтажный блок 672 продвигается в дистальном направлении DD, что также приводит к перемещению первого сегмента закрывающего штока 680 и первого поворотного звена 676 в дистальном направлении DD, конические шестерни 689, 699A, 699B приводят к перемещению второго закрывающего штока 690 и второго поворотного звена 678 в проксимальном направлении PD. Аналогично, когда первый монтажный блок 672 продвигается в проксимальном направлении PD, что также приводит к перемещению первого сегмента закрывающего штока 680 и первого поворотного звена 676 в проксимальном направлении PD, конические шестерни 689, 699A, 699B приводят к перемещению второго закрывающего штока 690 и второго поворотного звена 678 в дистальном направлении DD.
На ФИГ. 58 показан упор 1100 в открытом положении. Как показано на данной фигуре, первый закрывающий шток 680 находится несколько проксимальнее ко второму закрывающему штоку 690. При закрытии упора приводной соленоид 474 получает питание и продвигает по оси первый закрывающий шток 680 в дистальном направлении DD. Это вызывает поворот кулачковых дисков 1120 первым поворотным звеном 676 и первыми плечами рычажного механизма 687 в направлении против часовой стрелки CCW, как показано на ФИГ. 59. Это движение также приводит к перемещению второго приводного штока 690 в проксимальном направлении, в результате чего второе поворотное звено 678 и вторые плечи рычажного механизма 688 также будут вытягивать кулачковые диски 1120 в направлении против часовой стрелки CCW. При открытии упора приводной соленоид 474 сообщает осевое управляющее движение первому монтажному блоку 672, возвращая первый и второй сегменты управляющего штока 680, 690 в положения, показанные на ФИГ. 58.
Вариант осуществления концевого эффектора 1000, показанный на ФИГ. 60, включает приводную конфигурацию, по существу обозначенную элементом 748, обеспечивающую избирательное сообщение поворотных управляющих движений концевому эффектору 1000. Концевой эффектор 1000 включает пусковой элемент 1200, который установлен за счет резьбы на приводной стержень 1300 инструмента. Как показано на ФИГ. 61, приводной стержень 1300 инструмента имеет образованный на нем сегмент подшипника 1304, поддерживаемый с возможностью поворота в гильзе подшипника 1011. Приводной стержень 1300 инструмента содержит приводную шестерню 1302 инструмента, находящуюся в функциональном зубчатом зацеплении с поворотной трансмиссией, по существу обозначенной элементом 750, которая функционально взаимодействует с удлиненным каналом 1020 и функционально поддерживается частью узла удлиненного стержня 200. В одном примере формы поворотная трансмиссия 750 включает дифференциальный сцепной узел 760. Как показано на ФИГ. 64 и 65, дифференциальный сцепной узел 760 включает дифференциальный корпус 762, выполненный с возможностью избирательного поворота относительно корпуса привода концевого эффектора 1010 и поворота вместе с корпусом привода концевого эффектора 1010.
Дистальный сегмент приводного стержня 540 прикреплен к стержню центральной шестерни 752, к которому прикреплена центральная шестерня 754. Таким образом, центральная шестерня 754 будет поворачиваться при повороте дистального сегмента приводного стержня 540. Центральная шестерня 754 также будет перемещаться по оси вместе с дистальным сегментом приводного стержня 540. Дифференциальный сцепной узел 760 дополнительно включает множество планетарных шестерен 764, прикрепленных с возможностью поворота к дифференциальному корпусу 762. Например, по меньшей мере в одном варианте осуществления используются три планетарных шестерни 764. Каждая планетарная шестерня 764 находится в зубчатом зацеплении с первой кольцевой шестерней концевого эффектора 1016, образованной внутри корпуса привода концевого эффектора 1010. В примере осуществления, показанном на ФИГ. 60, корпус привода концевого эффектора 1010 прикреплен без возможности поворота к удлиненному каналу 1020 при помощи пары противоположных крепежных утолщений 1018 (на ФИГ. 60 показано только одно крепежное утолщение 1018), входящих в соответствующие крепежные пазы 1024 (на ФИГ. 60 показан только один крепежный паз 1024), образованные в проксимальном конце 1021 удлиненного канала 1020. Можно использовать и другие способы неподвижного прикрепления корпуса привода концевого эффектора 1010 к удлиненному каналу 1020, или корпус привода концевого эффектора 1010 может быть выполнен заодно с удлиненным каналом 1020. Таким образом, поворот корпуса привода концевого эффектора 1010 приведет к повороту удлиненного канала 1020 концевого эффектора 1000.
В варианте осуществления, показанном на ФИГ. 61-65, дифференциальный сцепной узел 760 дополнительно включает вторую кольцевую шестерню 766, образованную внутри дифференциального корпуса 762 для зубчатого зацепления с центральной шестерней 754. Дифференциальный сцепной узел 760 также включает третью кольцевую шестерню 768, образованную в дифференциальном корпусе 762, которая находится в зубчатом зацеплении с приводной шестерней 1302 инструмента. Поворот дифференциального корпуса 762 внутри корпуса привода концевого эффектора 1010 в конечном итоге приведет к повороту приводной шестерни 1302 инструмента и прикрепленного к ней приводного стержня 1300 инструмента.
Когда врачу необходимо повернуть концевой эффектор 1000 вокруг продольной оси инструмента LT-LT, дистальной к шарнирному сочленению 700, чтобы придать концевому эффектору желаемую ориентацию относительно целевой ткани, роботизированный контроллер 12 может активировать соленоид сдвигателя 394 и переместить по оси проксимальный сегмент приводного стержня 380 таким образом, чтобы центральная шестерня 754 переместилась в «первое осевое» положение, показанное на ФИГ. 65, 67 и 70. Как более подробно описано выше, дистальный сегмент приводного стержня 540 функционально соединен с проксимальным сегментом приводного стержня 380 при помощи соединения с возможностью быстрой разборки 210. Таким образом, осевое перемещение проксимального сегмента приводного стержня 380 может привести к осевому перемещению дистального сегмента приводного стержня 540, а также стержня центральной шестерни 752 и центральной шестерни 754. Как дополнительно описано выше, сдвигающая система 390 управляет осевым перемещением проксимального сегмента приводного стержня 380. В первом осевом положении центральная шестерня 754 находится в зубчатом зацеплении с планетарными шестернями 764 и второй кольцевой шестерней 766, таким образом вызывая поворот планетарных шестерен 764 и дифференциального корпуса 762 как единого блока при повороте центральной шестерни 754.
Поворотом проксимального сегмента приводного стержня 380 управляет вторая приводная система 370. Поворот проксимального сегмента приводного стержня 380 приводит к повороту дистального сегмента приводного стержня 540, а также стержня центральной шестерни 752 и центральной шестерни 754. Такой поворот дифференциального корпуса 762 и планетарных шестерен 764 как единого блока сообщает поворотное движение на корпус привода концевого эффектора 1010, достаточно сильное, чтобы преодолеть первую величину трения F1 между корпусом привода концевого эффектора 1010 и дистальной гнездовой частью 730 промежуточной шарнирной трубки 712, таким образом вызывая поворот корпуса привода концевого эффектора 1010 и прикрепленного к нему концевого эффектора 1000 вокруг продольной оси инструмента LT-LT относительно дистальной гнездовой части трубки 730. Таким образом, в таком положении корпус привода концевого эффектора 1010, дифференциальный корпус 762 и планетарные шестерни 764 поворачиваются вместе как единый блок. Поскольку стержень 1300 инструмента поддерживается гильзой подшипника 1011 в корпусе привода концевого эффектора, стержень 1300 инструмента также поворачивается вместе с корпусом привода концевого эффектора 1010. См. ФИГ. 61. Таким образом, поворот корпуса привода концевого эффектора 1010 и концевого эффектора 1000 не приводит к относительному повороту приводного стержня 1300 инструмента, который привел бы к смещению пускового элемента 1200. В показанном примере осуществления такой поворот концевого эффектора 1000 дистально к шарнирному сочленению 700 не приведет к повороту всего узла удлиненного стержня 200.
Когда необходимо сообщить поворотное приводное движение приводному стержню 1300 инструмента для активации пускового элемента 1200 внутри концевого эффектора 1000, центральную шестерню 754 перемещают по оси во «второе осевое» положение, расцепляя ее со второй кольцевой шестерней 766 и зубчато зацепляя планетарные шестерни 764, как показано на ФИГ. 61, 62, 64 и 66. Таким образом, когда желательно повернуть приводной стержень 1300 инструмента, роботизированный контроллер 12 активирует соленоид сдвигателя 394 и перемещает по оси центральную шестерню 754 в зубчатое зацепление с планетарными шестернями 764. В данном втором осевом или «пусковом положении» центральная шестерня 754 зубчато зацепляет только планетарные шестерни 764.
Поворотом проксимального сегмента приводного стержня 380 может управлять вторая приводная система 370. Поворот проксимального сегмента приводного стержня 380 приводит к повороту дистального сегмента приводного стержня 540, а также стержня центральной шестерни 752 и центральной шестерни 754. При повороте центральной шестерни 754 в первом пусковом направлении также поворачиваются планетарные шестерни 764. При повороте планетарные шестерни 764 также вызывают поворот дифференциального корпуса 762. Поворот дифференциального корпуса 762 вызывает поворот стержня 1300 инструмента вследствие зубчатого зацепления приводной шестерни 1302 инструмента с третьей кольцевой шестерней 768. Из-за величины трения F1 между корпусом привода концевого эффектора 1010 и дистальной гнездовой частью 730 промежуточной шарнирной трубки 712 поворот планетарных шестерен 764 не приводит к повороту корпуса концевого эффектора 1010 относительно промежуточной шарнирной трубки 712. Таким образом, поворот узла приводного стержня приводит к повороту приводного стержня 1300 инструмента без поворота всего концевого эффектора 1000.
Такая уникальная и новая поворотная трансмиссия 750 содержит единую приводную систему, которая может избирательно поворачивать концевой эффектор 1000 или активировать пусковой элемент 1200 в зависимости от осевого положения поворотного приводного стержня. Одним из преимуществ такой конфигурации является то, что она упрощает приводы, которые должны проходить через шарнирное сочленение 700. Также в ней центральный привод поступательно перемещается в основание удлиненного канала 1020, в результате чего приводной стержень 1300 инструмента может находиться под кассетой со скобами 1040 и активировать пусковой элемент 1200. Возможность поворачивать концевой эффектор, дистальный к шарнирному соединению, позволяет значительно улучшить возможности позиционирования концевого эффектора относительно целевой ткани.
Как указано выше, когда узел приводного стержня находится в первом осевом положении, поворот узла приводного стержня может приводить к повороту всего концевого эффектора 1000 дистально к шарнирному сочленению 700. Когда узел приводного стержня находится во втором осевом положении (в одном примере - проксимально к первому осевому положению), поворот узла приводного стержня может приводить к повороту приводного стержня 1300 инструмента.
Вариант осуществления поворотной трансмиссии, показанный на ФИГ. 64 и 65, включает систему дифференциальной блокировки 780, которая выполнена с возможностью удерживать узел приводного стержня в первом и втором осевых положениях. Как показано на ФИГ. 64 и 65, система дифференциальной блокировки 780 содержит первую удерживающую конструкцию 756 в стержне центральной шестерни 752, соответствующую первому осевому положению узла приводного стержня, и вторую удерживающую конструкцию 758 в стержне центральной шестерни 752, соответствующую второму осевому положению узла приводного стержня. В показанном варианте осуществления первая удерживающая конструкция содержит первый радиальный блокирующий желоб 757 в стержне центральной шестерни 752, а вторая удерживающая конструкция 758 содержит второй радиальный блокирующий желоб 759 в стержне центральной шестерни 752. Первый и второй блокирующий желоб 757, 759 взаимодействуют по меньшей мере с одним подпружиненным блокирующим элементом 784, выполненным с возможностью удерживающего зацепления блокирующих желобов 757, 759, когда узел приводного стержня находится в первом и втором осевых положениях соответственно. Блокирующие элементы 784 имеют сужающийся кончик 786 и поддерживаются с возможностью перемещения внутри дифференциального корпуса 762. Для приложения смещающего усилия к блокирующим элементам 784 можно использовать радиальную волнистую пружину 782, как показано на ФИГ. 63. При перемещении узла приводного стержня по оси в первое положение блокирующие элементы 784 защелкиваются для зацепления с первым радиальным блокирующим желобом 7576. См. ФИГ. 65. При перемещении узла приводного стержня по оси во второе осевое положение блокирующие элементы 784 защелкиваются для зацепления со вторым радиальным блокирующим желобом 759. См. ФИГ. 64. В альтернативных вариантах осуществления первая и вторая удерживающие конструкции могут содержать, например, лунки, соответствующие каждому из блокирующих элементов 784. Также в альтернативных вариантах осуществления, в которых узел приводного стержня выполнен с возможностью установки по оси в более чем двух осевых положениях, можно использовать дополнительные удерживающие конструкции, соответствующие каждому из данных осевых положений.
На ФИГ. 70 и 71 представлена альтернативная система дифференциальной блокировки 790, выполненная с возможностью обеспечения фиксации узла приводного стержня в одном из множества заданных осевых положений. Система дифференциальной блокировки 790 выполнена с возможностью установки узла приводного стержня в первом или во втором осевых положениях и предотвращения случайного размещения в другом осевом положении, в котором приводная система не может функционировать должным образом. В варианте осуществления, показанном на ФИГ. 70 и 71, система дифференциальной блокировки 790 включает множество блокирующих пружин 792, прикрепленных к узлу приводного стержня. Каждая блокирующая пружина 792 образована с первыми и вторыми блокирующими впадинами 794, 796, которые разделены частью с заостренным пиком 798. Блокирующие пружины 792 расположены так, чтобы взаимодействовать с заостренными блокирующими элементами 763, образованными на дифференциальном корпусе 762. Таким образом, когда заостренные блокирующие элементы 763 входят в первую блокирующую впадину 794, узел приводного стержня удерживается в первом осевом положении, а когда заостренные блокирующие элементы 763 входят во вторые блокирующие впадины 796, узел приводного стержня удерживается во втором осевом положении. Часть с заостренным пиком 798 между первой и второй блокирующими впадинами 794, 796 гарантирует, что узел приводного стержня будет находиться в первом или во втором осевом положении и не остановится в осевом положении между данными двумя осевыми положениями. Если желательно использовать дополнительные осевые положения, могут быть предусмотрены блокирующие пружины с дополнительными блокирующими впадинами, соответствующими необходимым осевым положениям.
Как показано на ФИГ. 60, 72 и 73, опорный подшипник 1030 поддерживается в кармане 1026 удлиненного канала 1020. Дистальная торцевая часть 1306 приводного стержня 1300 инструмента принимается с возможностью поворота в опорный подшипник 1030 и проходит через него. Завершает установку удерживающее кольцо 1032 закрепленное штифтом или иным способом на дистальном конце 1030, как показано на ФИГ. 73. Такое применение опорного подшипника 1030 позволяет «тянуть» пусковой элемент 1200 при его перемещении из исходного положения в конечное положение внутри удлиненного канала 1020. Такая конфигурация сводит к минимуму риск изгиба приводного стержня 1300 инструмента в условиях высокой нагрузки. Уникальная и новая конфигурация для монтажа и размещения опорного подшипника 1030 может приводить к увеличению нагрузки посадки подшипника с увеличением нагрузки на упор, что дополнительно повышает стабильность концевого эффектора. Такая конфигурация для монтажа по существу может служить для натяжения приводного стержня 1300 инструмента в течение связанного с высокой нагрузкой пускового цикла. В случае приводных шестерен это может устранить необходимость как в повороте приводного стержня 1300 инструмента, так и в сопротивлении изгибу стержня 1300. Применение удерживающего кольца 1032 также может упрощать производство и сборку конфигурации. Пусковой элемент 1200 выполнен с возможностью зацепления упора и удержания упора на желаемом расстоянии от платформы кассеты при приведении в движение пускового элемента 1200 из исходного в конечное положение. В данной конфигурации, например, при дистальном перемещении узла пускового элемента 1200 по удлиненному каналу 1020, длина той части упора, которая напоминает кантилевер, становится меньше, и жесткость ее возрастает, тем самым увеличивается направленное вниз усилие на дистальном конце удлиненного канала 1020, что дополнительно увеличивает нагрузку посадки подшипника.
Одно из преимуществ использования поворотных приводных элементов для пуска, закрытия, поворота и т.п. может представлять собой возможность применения высоких механических характеристик приводного стержня для адаптации к большим нагрузкам, необходимым для выполнения задач данным инструментом. Однако при использовании таких поворотных приводных систем может быть желательно отслеживать количество поворотов приводного стержня во избежание катастрофического сбоя или повреждения приводного винта и других компонентов инструмента в том случае, если приводной стержень или компонент концевого эффектора, выполненный с возможностью перемещения, будет приведен в движение слишком далеко в дистальном направлении. Таким образом, некоторые системы, включающие поворотные приводные стержни, в прошлом использовали датчики положения, отслеживающие поворот двигателя, или датчики, отслеживающие осевое положение компонента, выполненного с возможностью перемещения. Для использования в системе датчиков положения и/или других датчиков требуются дополнительные провода, электронные компоненты и вычислительная мощность, что может приводить к увеличению стоимости инструмента. Кроме того, предсказать надежность системы может быть достаточно трудно, и ее надежность будет зависеть от программного обеспечения и процессоров.
На ФИГ. 74-76 представлена механическая система ограничения такта 1310 для ограничения линейного такта пускового элемента 1200 при приведении пускового элемента 1200 в движение из исходного в конечное положение. В системе ограничения такта 1310 используется приводной стержень 1300' инструмента, в котором нитки винтовой резьбы 1308 на приводном стержне 1300' инструмента не проходят до дистального конца 1306 приводного стержня 1300'. Например, как показано на ФИГ. 74-76, приводной стержень 1300' инструмента включает секцию без резьбы 1309. Пусковой элемент 1200 имеет корпусную часть 1202, имеющую ряд ниток внутренней резьбы 1204, выполненных с возможностью резьбового соединения с нитками винтовой резьбы 1308 на приводном стержне 1300' инструмента таким образом, чтобы по мере поворота приводного стержня 1300' инструмента в первом пусковом направлении пусковой элемент 1200 приводился в движение в дистальном направлении DD до контакта с безрезьбовой частью 1309, и в данный момент прекращается дистальное продвижение пускового элемента 1200. Таким образом, пусковой элемент 1200 будет продвигаться дистально до тех пор, пока нитки внутренней резьбы 1204 в пусковом элементе 1200 не расцепятся с нитками резьбы 1308 в приводном стержне 1300' инструмента. Любой дополнительный поворот приводного стержня 1300' инструмента в первом направлении не будет приводить к дополнительному дистальному продвижению пускового элемента 1200. См., например, ФИГ. 75.
Показанный пример механической системы ограничения такта 1310 дополнительно включает дистальный смещающий элемент 1312, выполненный с возможностью контакта с пусковым элементом 1200, когда пусковой элемент 1200 продвигается до конца своего дистального такта (т.е. когда пусковой элемент больше не будет продвигаться дистально при повороте приводного стержня инструмента в первом направлении поворота). В варианте осуществления, показанном, например, на ФИГ. 74-76, смещающий элемент 1312 представляет собой пластинчатую пружину 1314, расположенную внутри удлиненного канала 1020, как показано на фигуре. На ФИГ. 74 представлена пластинчатая пружина 1314 до контакта с пусковым элементом 1200, а на ФИГ. 75 представлена пластинчатая пружина 1314 в сжатом состоянии после контакта с пусковым элементом 1200. В данном положении пластинчатая пружина 1314 служит для смещения пускового элемента 1200 в проксимальном направлении PD, чтобы нитки внутренней резьбы 1204 в пусковом элементе 1200 снова зацепились с приводным стержнем 1300' инструмента, когда приводной стержень 1300' инструмента поворачивается во втором направлении оттягивания. Когда приводной стержень 1300 инструмента поворачивается во втором направлении оттягивания, пусковой элемент 1200 оттягивается в проксимальном направлении. См. ФИГ. 76.
На ФИГ. 77-80 представлена другая система ограничения такта 1310'. В системе ограничения такта 1310' используется двухкомпонентный приводной стержень 1300'' инструмента. По меньшей мере в одной форме приводной стержень 1300'' инструмента, например, включает проксимальный сегмент приводного стержня 1320 инструмента, который содержит гнездо 1324 в своем дистальном конце 1322, и дистальный сегмент приводного стержня 1330, который имеет утолщение 1334, выступающее из его проксимального конца 1332. Утолщение 1334 выполнено по форме и размеру таким образом, чтобы приниматься в гнездо 1324 таким образом, чтобы нитки резьбы 1326 на проксимальном сегменте приводного стержня 1320 взаимодействовала с нитками резьбы 1336 на дистальном сегменте приводного стержня 1330 с образованием одной непрерывной приводной резьбы 1340. Как показано на ФИГ. 77, 79 и 80, дистальный конец 1338 дистального сегмента приводного стержня 1330 проходит через опорный подшипник 1032, поддерживаемый с возможностью перемещения в дистальном конце 1023 удлиненного канала 1020. Таким образом, опорный подшипник 1032 выполнен с возможностью перемещения по оси внутри удлиненного канала 1020. Дистальный смещающий элемент 1342 поддерживается внутри удлиненного канала 1020 для контакта с опорным подшипником 1032. На ФИГ. 78 представлен пусковой элемент 1200, приводимый в движение в дистальном направлении DD по мере того, как приводной стержень 1300'' инструмента приводится в движение в первом направлении поворота. На ФИГ. 79 представлен пусковой элемент 1200, находящийся на дистальном конце своего такта. Дополнительный поворот приводного стержня 1300'' инструмента в первом направлении поворота вызывает сжатие смещающего элемента 1342 опорным подшипником 1032, а также позволяет дистальному сегменту стержня 1330 проскальзывать, если проксимальный сегмент 1320 продолжает поворачиваться. Такое проскальзывание между проксимальным и дистальным сегментами 1320, 1330 приводного стержня инструмента предотвращает дополнительное дистальное продвижение пускового элемента 1200, что в конечном итоге могло бы повредить инструмент. Однако после прекращения первого поворотного движения смещающий элемент 1342 должен сместить дистальный сегмент стержня 1320 в проксимальном направлении, так чтобы утолщение 1334 было установлено в гнезде 1324. После этого поворот стержня 1300'' инструмента во втором направлении поворота приведет к перемещению пускового элемента 1200 в проксимальном направлении PD, как показано на ФИГ. 80.
На ФИГ. 81 представлена другая система ограничения такта 1310''. В данном варианте осуществления приводной стержень 1300 инструмента имеет образованное на нем утолщение 1350, форма и размер которого позволяют ему приниматься в гнездо 1352 в сегменте подшипника 1304, который имеет приводную шестерню 1302 инструмента, образованную на нем или каким-либо иным способом прикрепленную к нему. На ФИГ. 81A и 81B представлены различные утолщения 1350' (ФИГ. 81A) и 1350'' (ФИГ. 81B), выполненные с возможностью съемного зацепления соответствующих гнезд 1352' и 1352'' соответственно. Пластинчатая пружина 1314 размещена с возможностью контакта с пусковым элементом 1200 при достижении пусковым элементом 1200 конца своего такта. Дополнительный поворот приводного стержня 1300 инструмента будет приводить к тому, что утолщение 1350, 1350', 1350'' выскользнет из гнезда 1352, 1352', 1352'' соответственно, тем самым предотвращая дополнительный поворот стержня 1300 инструмента. После прекращения сообщения поворотного движения приводному стержню 1300 инструмента пластинчатая пружина 1314 сообщит смещающее движение пусковому элементу 1200, в конечном итоге смещая приводной стержень 1300 инструмента в проксимальном направлении PD, чтобы установить утолщение 1350 в гнезде 1352. Поворот приводного стержня 1300 инструмента во втором направлении поворота приведет к оттягиванию пускового элемента 1200 в проксимальном направлении PD в исходное положение. После того как пусковой элемент 1200 вернулся в исходное положение, упор 1100 можно открыть.
В показанном примере осуществления пусковой элемент 1200 выполнен с возможностью зацепления упора 1100 по мере дистального продвижения пускового элемента 1200 через концевой эффектор, чтобы конструктивно отделить упор от кассеты со скобами и обеспечить надлежащее формирование закрытых скоб, особенно если количество зажатой ткани для этого недостаточно. В данном и других вариантах осуществления можно использовать и другие формы пусковых элементов, которые выполнены с возможностью зацепления и отделения упора от кассеты со скобами или удлиненного канала и которые описаны в патенте США № 6,978,921, озаглавленном «Хирургический сшивающий инструмент со встроенным трехрогим пусковым механизмом», описание которого полностью включено в настоящий документ путем ссылки. Как показано на ФИГ. 82 и 83, корпусная часть 1202 пускового элемента 1200 содержит пяточную часть 1206, которая сверху зацепляет паз для канала 1028 в удлиненном канале 1020. См. ФИГ. 60. Аналогично корпус скальпеля включает пару выступающих латерально верхних ребер 1208. При активации с закрытым упором 1100 верхние ребра 1208 могут продвигаться дистально в продольном пазу для упора 1103, проходя дистально через упор 1100. Любые небольшие изгибания упора 1100 вверх преодолеваются направленным вниз усилием, создаваемым верхними ребрами 1208.
В целом нагрузки, необходимые для закрытия и продвижения пускового элемента, т.е. «запуска» пускового элемента, потенциально могут превышать 90,7 кг (200 фунтов). Однако при таких требованиях к усилию может быть необходимо, чтобы нитки внутренней резьбы 1204 в пусковом элементе содержали нитки с относительно мелким шагом, т.е. силовой тип резьбы, такой как нитки резьбы Acme. Более того, для обеспечения достаточной опоры верхним ребрам 1208, чтобы пусковой элемент 1200 не заклинивало при дистальном приведении в движение через концевой эффектор, может быть желательно, чтобы нитки резьбы приводного стержня инструмента в любой данный момент времени зацепляли не менее 5-15 ниток резьбы пускового элемента. Однако традиционные способы производства могут не подходить для формирования в корпусе пускового элемента 1202 достаточного количества ниток резьбы при достаточной глубине резьбы в пределах отверстия диаметром 0,2-0,38 см (0,08-0,150 дюйма).
На ФИГ. 82-84 представлен пусковой элемент 1200', который может преодолеть по меньшей мере часть указанных выше проблем. Как показано на данных фигурах, корпусная часть 1202' пускового элемента имеет полое гнездо стержня 1210, проходящее через нее, размер которого позволяет ему принимать через себя стержень инструмента. Нитки внутренней резьбы в данном варианте осуществления образованы рядом штоков 1214, проходящих в поперечном направлении через отверстия 1212 в гнезде стержня 1210, как показано на фигурах. Как показано на ФИГ. 84, штифты 1214 располагаются на малом диаметре шага ниток резьбы 1308 на приводном стержне 1300 инструмента.
На ФИГ. 85 представлен другой пусковой элемент 1200'', который также может преодолеть по меньшей мере часть указанных выше производственных проблем. Как показано на данной фигуре, корпусная часть 1202'' пускового элемента 100'' имеет полое гнездо стержня 1210, проходящее через нее, размер которого позволяет ему принимать через себя стержень инструмента. Как показано на фигуре, в корпусной части 1202'' образована пара окошек 1216. Нитки внутренней резьбы 1220 в данном варианте осуществления образована на вкладках 1218, которые вставляются в окошки 1216 и прикрепляются в них путем сварки, адгезива и т.п. На ФИГ. 86 и 87 представлен другой пусковой элемент 1200'', в котором доступ в гнездо 1210 осуществляется через окошки доступа 1230A, 1230B, образованные в корпусной части 1202''. Например, предусмотрена пара окошек доступа 1230A на одной стороне гнездовой части 1210, чтобы можно было образовать сегменты внутренней резьбы 1232 в противоположной стенке гнезда 1210. Другое окошко доступа 1230B предусмотрено на противоположной стороне гнездовой части 1210, чтобы можно было сформировать центральный сегмент внутренней резьбы 1234 на противоположной стенке между сегментами внутренней резьбы 1232. Сегменты резьбы 1232, 1234 вместе за счет резьбы зацепляют нитки резьбы 1308 на приводном стержне 1300 инструмента.
Концевой эффектор 1000 выполнен с возможностью съемно поддерживать в себе кассету со скобами 1040. См. ФИГ. 60. Кассета со скобами 1040 включает корпус кассеты 1042, выполненный с возможностью функциональной установки в удлиненный канал 1020. Корпус кассеты 1042 имеет в себе удлиненный паз 1046 для пускового элемента 1200. Корпус кассеты 1042 дополнительно образует верхнюю поверхность, которая в настоящем документе называется платформой кассеты 1044. Кроме того, с каждой стороны удлиненного паза 1046 предусмотрены две линии расположенных в шахматном порядке отверстий для скоб 1048. Отверстия для скоб 1048 функционально поддерживают соответствующие выталкиватели скоб 1050, которые поддерживают на себе одну или две хирургические скобы (не показаны). Известны различные варианты конфигурации выталкивателей скоб, которые можно применять без отступления от сущности и объема различных примеров осуществления настоящего изобретения.
В вариантах осуществления пускового элемента также используется узел клиновидных салазок 1250 для осуществления выталкивающего контакта с выталкивателями скоб, функционально поддерживаемыми в кассете со скобами 1040. Как показано на ФИГ. 60, узел клиновидных салазок 1250 включает по меньшей мере два клина 1252, ориентированных так, чтобы обеспечить выталкивающий контакт с линиями выталкивателей скоб, функционально поддерживаемых в кассете со скобами 1040. При дистальном приведении в движение пускового элемента 1200 узел клиновидных салазок 1250 двигается вместе с пусковым элементом 1220, и имеющиеся на нем клинья 1252 толкают выталкиватели 1050 вверх к закрытому упору 1100. При приведении в действие вверх выталкивателей 1050 поддерживаемые на них хирургические скобы выталкиваются из соответствующих отверстий 1048, входя в формирующий контакт с поверхностью для формирования скоб 1104 закрытого упора 1100.
В различных примерах осуществления концевого эффектора, описанных в настоящем документе, также можно использовать новую и уникальную конфигурацию пусковой блокировки, которая предотвращает случайное продвижение или «запуск» пускового элемента врачом, когда кассета отсутствует, при неправильной установке кассеты в концевой эффектор и/или при наличии в концевом эффекторе использованной кассеты. Например, как более подробно описано ниже, конфигурация пусковой блокировки может взаимодействовать с приводным стержнем 1300 инструмента и/или пусковым элементом 1200, предотвращая случайное продвижение пускового элемента 1200 в одном из описанных выше условий.
В показанном варианте осуществления поворот приводного стержня 1300 инструмента в первом, или «пусковом», направлении приведет к тому, что пусковой элемент 1200 будет приведен в движение дистально через кассету со скобами 1040, например, если пусковой элемент 1200 должным образом выровнен с удлиненным пазом 1046 в корпусе кассеты 1042 (ФИГ. 60), пазом для канала 1028 в удлиненном канале 1020 и пазом для упора 1103 в упоре 1100. Как преимущественно показано на ФИГ. 90, удлиненный паз 1046, паз для канала 1028 и/или паз для упора 1103 могут направлять пусковой элемент 1200 при его перемещении по траектории через хирургический концевой эффектор 1000, например, в течение пускового такта. Когда пусковой элемент 1200 находится в функционирующей конфигурации, паз для канала 1028, например, выполнен с возможностью принимать пяточную часть 1206 пускового элемента 1200, а паз для упора 1103 выполнен с возможностью принимать верхние ребра 1208 пускового элемента 1200. Когда часть пускового элемента 1200 расположена в пазу для канала 1028 и/или пазу для упора 1103, пусковой элемент 1200 может быть выровнен или по существу выровнен по оси A. Паз для канала 1028 и/или паз для упора 1103 могут направлять пусковой элемент 1200 и сохранять выравнивание пускового элемента 1200 по оси A, например, при перемещении пускового элемента 1200 из исходного положения во вторичное положение относительно корпуса кассеты 1042.
Как кратко описано выше, в различных примерах хирургической кассеты со скобами хирургические скобы поддерживаются на выталкивателях скоб, выполненных с возможностью перемещения, поддерживаемых в корпусе кассеты. В различных примерах осуществления концевого эффектора узел клиновидных салазок 1250 выполнен с возможностью контакта с выталкивателями скоб по мере того, как узел клиновидных салазок приводится в движение дистально через кассету со скобами, с выталкиванием скоб из соответствующих полостей в корпусе кассеты и введением их в формирующий контакт с закрытым упором. По меньшей мере в одном примере осуществления клиновидные салазки 1250 расположены внутри кассеты со скобами 1040. Таким образом, каждая новая кассета со скобами 1040 функционально поддерживает в себе собственные клиновидные салазки. Когда врач правильно устанавливает новую кассету со скобами 1040 в удлиненный канал, клиновидные салазки 1250 выполнены с возможностью захвата приводного стержня 1300 инструмента и зацепления пускового элемента 1200 так, как показано, например, на ФИГ. 60, 88 и 89. Как показано на данных фигурах, пример узла клиновидных салазок 1250 может содержать корпус салазок 1414, фланец 1410 и клинья 1252. Корпус салазок 1414 может располагаться вокруг части приводного стержня 1300 инструмента, когда узел клиновидных салазок 1250 находится в удлиненном канале 1020. Корпус салазок 1414 может иметь такую конструкцию, чтобы корпус салазок 1414 не контактировал с приводным стержнем 1300 инструмента, когда корпус салазок 1414 расположен вокруг приводного стержня 1300 инструмента. Корпус салазок 1414 может содержать поверхность 1412, которая, например, изгибается над и/или вокруг приводного стержня 1300 инструмента. В таком варианте осуществления фланец 1410, например, проходит между корпусом салазок 1414 и каждым из клиньев 1252. Кроме того, корпус салазок 1414 имеет в себе прорезь 1415, выполненную с возможностью принимать в себя часть корпуса пускового элемента 1203. Как преимущественно показано на ФИГ. 89, фланец 1410 может проходить по существу параллельно пяточной части 1206 пускового элемента 1200, когда пусковой элемент 1200 зацепляет узел клиновидных салазок 1250.
Когда новую кассету со скобами 1040 правильно устанавливают в удлиненный канал 1020, исходная активация пускового элемента 1200 (например, в результате поворота приводного стержня 1300 инструмента) приводит к тому, что часть корпуса пускового элемента 1203 входит в прорезь 1415 в клиновидных салазках 1250, тем самым выравнивая пусковой элемент 1200 с удлиненным пазом 1046 в корпусе кассеты 1042 (ФИГ. 60), пазом для канала 1028 в удлиненном канале 1020 и пазом для упора 1103 в упоре 1100, позволяя пусковому элементу 1250 продвигаться дистально через кассету со скобами 1040. Таким образом, клиновидные салазки в настоящем документе также могут называться «выравнивающим элементом». Если кассета со скобами 1040 неправильно установлена в удлиненном канале, активация пускового элемента 1200 не приведет к выравнивающему зацеплению с прорезью 1415 в клиновидных салазках 1250, а пусковой элемент 1200 останется не выровненным с пазом для канала 1028 в удлиненном канале 1020 и пазом для упора 1103 в упоре 1100, что не позволит активировать пусковой элемент 1250.
После того как новая кассета со скобами 1040 будет правильно вставлена в удлиненный канал 1020, врач активирует пусковой элемент, сообщая первое поворотное движение приводному стержню 1300 инструмента. После того как пусковой элемент 1250 приведен в движение дистально через кассету со скобами 1250 в самое дистальное положение, возвратное поворотное движение будут сообщать приводному стержню 1300 инструмента, возвращая пусковой элемент 1250 в его исходное положение, вне хирургической кассеты со скобами 1040, чтобы использованную кассету можно было извлечь из удлиненного канала 1020 и вставить в него новую кассету со скобами. Когда пусковой элемент 1250 возвращается в его исходное положение, клиновидные салазки 1250 остаются в дистальном конце кассеты со скобами и не возвращаются вместе с пусковым элементом 1200. Таким образом, при перемещении пускового элемента 1200 проксимально из кассеты со скобами 1040 и из паза для упора 1103 в упоре поворотное движение приводного стержня 1300 инструмента будет воздействовать на пусковой элемент 1200 таким образом, что он слегка повернется в нефункциональное положение. Таким образом, когда пусковой элемент 1200 находится в нефункциональном положении (за пределами кассеты), если врач снимет использованную кассету 1040 и не заменит ее новой кассетой, содержащей новые клиновидные салазки 1250, а затем закроет упор 1110 и попытается активировать пусковой элемент 1200, из-за отсутствия клиновидных салазок, выравнивающих пусковой элемент 1200, пусковой элемент 1200 окажется неспособен к дистальному продвижению по удлиненному каналу 1020. Таким образом, такая конфигурация предотвращает случайную активацию врачом пускового элемента 1200, когда кассета отсутствует.
В таком примере осуществления пусковой элемент 1200 может быть по существу выровнен по оси А, если пусковой элемент 1200 ориентирован в функциональной конфигурации, в которой пусковой элемент 1200 способен перемещаться по заданной траектории через концевой эффектор 1000. Ось A может быть по существу перпендикулярна поверхности для формирования скоб 1104 упора 1100 и/или платформе 1044 кассеты со скобами 1040 (ФИГ. 60). В других примерах осуществления ось A может быть расположена под углом относительно поверхности для формирования скоб 1104 упора 1100 и/или к платформы 1044 кассеты со скобами 1040. Кроме того, по меньшей мере в одном примере осуществления ось А может проходить через центр хирургического концевого эффектора 1000, а в других примерах осуществления ось A может располагаться с любой стороны от центра хирургического концевого эффектора 1000.
На ФИГ. 91-97 представлен один пример формы хирургического концевого эффектора 1400, в котором используется уникальная и новая конфигурация пусковой блокировки. Как показано на ФИГ. 91-95, когда пусковой элемент 1200 находится в исходном положении, пусковой элемент 1200 имеет нефункциональную конфигурацию, которая предотвращает его дистальное продвижение через концевой эффектор из-за нарушения выравнивания пускового элемента 1200 с пазом для канала 1028 и пазом для упора 1103. Пусковой элемент 1200 может удерживаться в нефункциональной конфигурации пусковой блокировкой, по существу обозначенной элементом 1418. Как преимущественно показано на ФИГ. 91-93, по меньшей мере в одной форме пусковая блокировка 1418 включает первый блокирующий желоб или прорезь 1402, образованный в удлиненном канале 1020. Однако в других примерах осуществления первая блокирующая прорезь 1402 может, например, образовывать отверстие в первой бранше 1004, второй бранше 1006, удлиненном канале 1020 и/или упоре 1100. В различных примерах осуществления первая блокирующая прорезь 1402 размещена в хирургическом концевом эффекторе 1400 таким образом, что первая блокирующая прорезь 1402 с возможностью удержания зацепляет часть пускового элемента 1200, когда пусковой элемент 1200 находится в нефункциональной конфигурации. Первая блокирующая прорезь 1402 может, например, располагаться вблизи, смежно с пазом для канала 1028 в удлиненном канале 1020 и/или сообщаться с ним. Как преимущественно показано на ФИГ. 91, паз для канала 1028 может иметь некоторую ширину по своей длине. По меньшей мере в одном примере осуществления первая блокирующая прорезь 1402 может проходить от паза для канала 1028 таким образом, что общая ширина паза для канала 1028 и первой блокирующей прорези 1402 превышает ширину паза для канала 1028. Как показано на ФИГ. 91, когда пусковой элемент 1200 находится в нефункциональной конфигурации, пяточная часть 1206 пускового элемента 1200 проходит в первую блокирующую прорезь 1402, в результате чего предотвращается ее случайное дистальное продвижение по удлиненному каналу 1020.
При правильной установке новой кассеты со скобами 1040 в удлиненный канал 1020 начало пускового такта приводит к тому, что пусковой элемент зацепляет клиновидные салазки 1250, находящиеся внутри кассеты со скобами 1040, которые перемещают пусковой элемент 1200 в рабочее выравнивание с удлиненным пазом 1046 в корпусе кассеты 1042, пазом для канала 1028 в удлиненном канале 1020 и пазом для упора 1103 в упоре 1100, что позволяет пусковому элементу 1250 дистально продвигаться через них. При перемещении пускового элемента 1200 из исходного положения во вторичное положение относительно кассеты со скобами 1040 пусковой элемент 1200 может, например, переместиться мимо первой блокирующей прорези 1402. Первая блокирующая прорезь 1402 может, например, иметь длину приблизительно 0,64 см (0,25 дюйма). В некоторых других примерах осуществления первая блокирующая прорезь 1402 может, например, иметь длину от приблизительно 0,38 см (0,15 дюйма) до приблизительно 0,64 см (0,25 дюйма) или от приблизительно 0,64 см (0,25 дюйма) до приблизительно 2,5 см (1,0 дюйм).
Как преимущественно показано на ФИГ. 93 и 94, хирургический концевой эффектор 1400 может иметь конструкцию, предусматривающую вхождение в него верхних ребер 1208 пускового элемента 1200, когда пусковой элемент 1200 находится в нефункциональной конфигурации. Например, пусковая блокировка 1418 может включать второй блокирующий желоб, или прорезь, 1404 в упоре 1100. В показанном примере осуществления вторая блокирующая прорезь 1404 может, например, находиться вблизи, смежно с пазом для упора 1103 в упоре 1100 и/или сообщаться с ним. Паз для упора 1103 может иметь некоторую ширину по своей длине. По меньшей мере в одном примере осуществления вторая блокирующая прорезь 1404 может проходить от паза для упора 1103 таким образом, что общая ширина паза для упора 1103 и второй блокирующей прорези 1404 превышает ширину паза для упора 1103. Вторая блокирующая прорезь 1404 может проходить на некоторую длину или расстояние в хирургическом концевом эффекторе 1400. Пусковой элемент 1200 может иметь конструкцию, предусматривающую зацепление второй блокирующей прорези 1404 вдоль ее длины, когда пусковой элемент 1200 находится в нефункциональной конфигурации. При перемещении пускового элемента 1200 из исходного положения во вторичное положение относительно кассеты со скобами 1040 пусковой элемент 1200 может, например, проходить мимо второй блокирующей прорези 1404. Вторая блокирующая прорезь 1404 может, например, иметь длину приблизительно 0,64 см (0,25 дюйма). В некоторых других примерах осуществления вторая блокирующая прорезь 1404 может, например, иметь длину от приблизительно 0,38 см (0,15 дюйма) до приблизительно 0,64 см (0,25 дюйма) или от приблизительно 0,64 см (0,25 дюйма) до приблизительно 2,5 см (1,0 дюйм). Как преимущественно показано на ФИГ. 93, первая блокирующая прорезь 1402 может проходить из паза канала 1028 в первом направлении X, а вторая блокирующая прорезь 1404 может проходить из паза для упора 1103 во втором направлении Y. По меньшей мере в одном примере осуществления первое направление X может быть по существу латерально противоположным второму направлению Y. В таких примерах осуществления пяточная часть 1206 пускового элемента 1200 может поворачиваться в первую блокирующую прорезь 1402, а верхние ребра 1208 пускового элемента 1200 могут поворачиваться во вторую блокирующую прорезь 1404, когда пусковой элемент 1200 переходит в нефункциональную конфигурацию.
Как преимущественно показано на ФИГ. 92-94, когда пусковой элемент 1200 ориентируется в нефункциональную конфигурацию, соответствующие части пускового элемента 1200 зацепляют первую и вторую блокирующие прорези 1402, 1404. Пусковой элемент 1200 может по меньшей мере частично находиться внутри первой и второй блокирующих прорезей 1402, 1404, когда пусковой элемент 1200 находится в нефункциональной конфигурации. Пусковой элемент 1200 может смещаться в первую и вторую блокирующие прорези 1402, 1404, когда пусковой элемент 1200 переходит в нефункциональную конфигурацию. Кроме того, когда пусковой элемент 1200 ориентируется в функциональную конфигурацию, пусковой элемент 1200 может расцепиться с первой и второй блокирующими прорезями 1402, 1404.
Часть или части хирургического концевого эффектора 1400 могут блокировать пусковой элемент 1200 и ограничивать или предотвращать перемещение пускового элемента 1200 через хирургический концевой эффектор 1400, когда пусковой элемент 1200 ориентируется в нефункциональную конфигурацию (см., например, ФИГ. 95). Например, первая бранша 1004, вторая бранша 1006, удлиненный канал 1020 и/или упор 1100 могут быть выполнены с возможностью блокировки пускового элемента 1200, когда он находится в функциональной конфигурации. В некоторых примерах осуществления первая блокирующая прорезь 1402 имеет образованную на ней первую блокирующую поверхность или край 1406 (ФИГ. 91 и 92), а вторая блокирующая прорезь 1404 имеет образованную на ней вторую блокирующую поверхность или край 1408 (ФИГ. 94). Попытки активировать пусковой элемент 1200, когда пусковой элемент 1200 находится в нефункциональной конфигурации, приведут к тому, что соответствующие части пускового элемента 1200 будут контактировать с первой и/или второй блокирующими поверхностями 1406, 1408, чтобы не позволить пусковому элементу 1200 переместиться из исходного положения к вторичным положениям. По меньшей мере в одном примере осуществления хирургический концевой эффектор 1400 не обязательно должен иметь как первый блокирующий край 1406, так и второй блокирующий край 1408.
На ФИГ. 97-104 представлен другой пример осуществления хирургического концевого эффектора 1500, в котором используется другой пример конфигурации пусковой блокировки. Например, как показано на данных фигурах, хирургический концевой эффектор 1500 может содержать удлиненный канал 1020, приводной стержень 1300 инструмента и пусковой элемент 1200. Хирургический концевой эффектор 1500 также может содержать корпус привода концевого эффектора 1510 (см., например, ФИГ. 100). Аналогично корпусу привода концевого эффектора 1010, описанному выше в настоящем документе, корпус привода концевого эффектора 1510 может содержать гильзу подшипника 1511 и третью кольцевую шестерню или приводной элемент корпуса 768. Гильза подшипника 1511 может иметь такую конструкцию, чтобы сегмент подшипника 1304 приводного стержня 1300 инструмента мог размещаться с возможностью перемещения внутри гильзы подшипника 1511. Сегмент подшипника 1304 может перемещаться в гильзе подшипника 1511 при перемещении приводного стержня 1300 инструмента между нефункциональным положением и функциональным положением, как описано в настоящем документе. Гильза подшипника 1511 может содержать отверстие 1512, имеющее удлиненное поперечное сечение, такое как, например, поперечное сечение в форме овала, эллипса и/или полукругов, с продольно ориентированными и/или параллельными друг другу сторонами. В таких примерах осуществления сегмент подшипника 1304 может располагаться вплотную к первой стороне отверстия 1512, например, первого полукруга, или вблизи нее, когда приводной стержень 1300 инструмента находится в нефункциональном положении. Кроме того, сегмент подшипника 1304 может располагаться вплотную ко второй стороне отверстия 1512, например, второго полукруга, или вблизи нее, когда приводной стержень 1300 инструмента находится в функциональном положении.
Приводной стержень 1300 инструмента может быть выполнен с возможностью перемещения между нефункциональным положением и функциональным положением. Как описано в настоящем документе, смещающий элемент 1520 и/или часть кассеты со скобами 1040 может, например, перемещать приводной стержень 1300 инструмента между нефункциональным положением и функциональным положением. В показанном и других вариантах осуществления приводная шестерня 1302 инструмента приводного стержня 1300 инструмента может зацепляться с третьей кольцевой шестерней 768 корпуса привода концевого эффектора 1510, когда приводной стержень 1300 инструмента находится в функциональном положении. Приводная шестерня 1302 инструмента может, например, представлять собой шестерню внешнего зацепления, а третья кольцевая шестерня 768 может представлять собой, например, шестерню внутреннего зацепления. Приводная шестерня 1302 инструмента может перемещаться в зацепление с третьей кольцевой шестерней 768, когда приводной стержень 1300 инструмента перемещается из нефункционального положения в функциональное положение. Кроме того, приводная шестерня 1302 инструмента может расцепляться с третьей кольцевой шестерней 768, когда приводной стержень 1300 инструмента находится в нефункциональном положении. По меньшей мере в одном примере осуществления приводная шестерня 1302 инструмента может перемещаться из зацепления с третьей кольцевой шестерней 768, когда приводной стержень 1300 инструмента перемещается из функционального положения в нефункциональное положение. Аналогично другим примерам осуществления, описанным в настоящем документе, когда приводной стержень 1300 инструмента зацепляется с третьей кольцевой шестерней 768 в корпусе привода концевого эффектора 1510, приводная система 750 (ФИГ. 61) может двигать пусковой элемент 1200, например, по удлиненному каналу 1020 хирургического концевого эффектора 1500 в течение пускового такта.
Как преимущественно показано на ФИГ. 101 и 102, сегмент подшипника 1304 может располагаться вплотную к первой стороне отверстия 1512 гильзы подшипника 1511, когда приводной стержень 1300 инструмента находится в нефункциональном положении. Удерживающий штифт 1514 (ФИГ. 98, 100, 101 и 103) может быть выполнен с возможностью смещения сегмента подшипника 1304 в сторону первой стороны отверстия 1512 таким образом, чтобы приводной стержень 1300 инструмента удерживался, например, в нефункциональном положении, а приводная шестерня 1302 инструмента удерживалась, например, вне зацепления с третьей кольцевой шестерней 768. В некоторых примерах осуществления удерживающий штифт 1514 может быть подпружиненным, чтобы удерживающий штифт 1514 прилагал усилие к сегменту подшипника 1304 и перемещал приводной стержень 1300 инструмента к нефункциональному положению. Приводной стержень 1300 инструмента может оставаться в нефункциональном положении до тех пор, пока другое усилие не преодолеет усилие, прилагаемое удерживающим элементом 1514, и не переместит приводной стержень 1300 инструмента, например, к функциональному положению, а приводная шестерня 1302 инструмента, например, не зацепит третью кольцевую шестерню 768.
Как преимущественно показано на ФИГ. 103 и 104, сегмент подшипника 1304 может располагаться вплотную ко второй стороне отверстия 1512 гильзы подшипника 1511, когда приводной стержень 1300 инструмента находится в функциональном положении. В различных примерах осуществления усилие, прилагаемое удерживающим штифтом 1514 (ФИГ. 98, 100, 101 и 103), можно преодолеть с перемещением сегмента подшипника 1304 ко второй стороне отверстия 1512 таким образом, чтобы приводной стержень 1300 инструмента перешел, например, в функциональное положение, а приводная шестерня 1302 инструмента, например, зацепилась с третьей кольцевой шестерней 768. Как описано в настоящем документе, смещающий элемент 1520 может, например, прилагать к сегменту подшипника 1304 усилие, которое преодолевает усилие, прилагаемое удерживающим штифтом 1515.
Хирургический концевой эффектор 1500 может содержать смещающий элемент 1520, выполненный с возможностью перемещения между первым набором положений (см., например, ФИГ. 103) и вторым набором положений (см., например, ФИГ. 101). Второй набор положений может быть дистальным ко второму набору положений относительно корпуса привода концевого эффектора 1510. Когда смещающий элемент 1520 находится в первом наборе положений, смещающий элемент 1520 может быть, например, выполнен с возможностью перемещения приводного стержня 1300 инструмента в функциональное положение. Когда смещающий элемент 1520 находится во втором наборе положений, смещающий элемент 1520 может, например, освободить приводной стержень 1300 инструмента таким образом, что приводной стержень инструмента может вернуться в нефункциональное положение.
Смещающий элемент 1520 может представлять собой независимый элемент, выполненный с возможностью установки в хирургическом концевом эффекторе 1500. Смещающий элемент 1520 может, например, удерживаться с возможностью перемещения в хирургическом концевом эффекторе 1500 и может, например, быть выполнен с возможностью функционального зацепления с кассетой со скобами 1040. Кассета со скобами 1040 может содержать смещающий элемент 1520. В некоторых примерах осуществления смещающий элемент 1520 может, например, быть выполнен заодно с узлом клиновидных салазок 1250 кассеты со скобами 1040, и смещающий элемент 1520 может, например, удерживаться с возможностью перемещения в кассете со скобами 1040. В таких примерах осуществления смещающий элемент 1520 может, например, перемещаться по продольному каналу 1020 по мере перемещения узла клиновидных салазок 1250 и/или пускового элемента 1200 по удлиненному каналу 1020 в течение пускового такта.
Как преимущественно показано на ФИГ. 99, смещающий элемент 1520 может содержать смещающий корпус 1522 и ножки 1526, проходящие от смещающего корпуса 1522. Смещающий корпус 1522 может располагаться вокруг части приводного стержня 1300 инструмента в хирургическом концевом эффекторе 1500. В некоторых примерах осуществления смещающий корпус 1522 может иметь такую конструкцию, чтобы смещающий корпус 1522 не входил в контакт с приводным стержнем 1300 инструмента, когда смещающий корпус 1522 располагается вокруг приводного стержня 1300 инструмента. Смещающий корпус 1522 может содержать поверхность 1524, которая, например, изгибается над и/или вокруг приводного стержня 1300 инструмента. Ножки 1526 могут проходить вдоль части удлиненного канала 1020 и/или с любой стороны приводного стержня 1300 инструмента. Смещающий элемент 1520 также может содержать по меньшей мере один удлиненный конец или клин 1528. Как описано в настоящем документе, клин 1528 может зацеплять с возможностью перемещения гильзу подшипника 1511 и/или сегмент подшипника 1304, перемещая приводной стержень инструмента в функциональное положение. Смещающий элемент 1520 также может содержать по меньшей мере одну пружину 1530. Например, пружина 1530 может быть выполнена с возможностью деформации между исходной конфигурацией (ФИГ. 101) и деформированной конфигурацией (ФИГ. 103). Пружина 1530 может удерживать смещающий элемент 1520 в первом наборе положений относительно корпуса привода концевого эффектора 1510 до тех пор, пока некоторое усилие не деформирует пружину 1530, перемещая ее из исходной конфигурации в деформированную конфигурацию. При перемещении пружины 1530 из исходной конфигурации в деформированную конфигурацию смещающий элемент 1520 может переместиться из второго набора положений в первый набор положений относительно корпуса привода концевого эффектора 1510.
Как преимущественно показано на ФИГ. 101, до вставки кассеты со скобами 1040 (ФИГ. 103) в удлиненный канал 1020 пружина 1530 может, например, находиться в исходной конфигурации, а смещающий элемент 1520 может, например, находиться во втором наборе положений. Удерживающий штифт 1514 может, например, удерживать сегмент подшипника 1304 вплотную к первой стороне отверстия 1512. В таких примерах осуществления приводной стержень 1300 инструмента может удерживаться удерживающим штифтом 1514 в нефункциональном положении.
Как показано на ФИГ. 103, установка кассеты со скобами 1040 в удлиненный канал 1020 приводит к проксимальному перемещению смещающего элемента 1520 против усилия пружин 1530 в первый набор положений, причем клин 1528 зацепляет с возможностью перемещения гильзу подшипника 1511 и сегмент подшипника 1304 и смещает сегмент подшипника 1304 и приводную шестерню 1302 инструмента приводного стержня 1300 инструмента в зубчатое зацепление с третьей кольцевой шестерней 768. После этого активация системы пускового привода, как описано в настоящем документе, приведет к активации пускового элемента 1200. В некоторых примерах осуществления часть кассеты со скобами 1040 выполнена с возможностью непосредственного контакта со смещающим элементом 1520 и перемещения смещающего элемента 1520 в первый набор положений. В других примерах осуществления часть кассеты со скобами 1040 выполнена с возможностью контакта с другим элементом в хирургическом концевом эффекторе 1500, таким как, например, пусковой элемент 1200, и функционального перемещения смещающего элемента 1520 в первый набор положений. В других примерах осуществления кассета со скобами 1040 содержит смещающий элемент 1520, выполненный с ней заодно.
В различных примерах осуществления смещающий элемент 1520 может перемещаться по удлиненному каналу 1020 хирургического концевого эффектора 1500 по мере приведения в движение пускового элемента 1200 и/или узла клиновидных салазок 1250 по удлиненному каналу 1020 приводным стержнем 1300 инструмента, например, в течение пускового такта, как описано в настоящем документе. Смещающий элемент 1520 может быть выполнен заодно с узлом клиновидных салазок 1250 кассеты со скобами 1040 и/или прикреплен к нему. В таких примерах осуществления при исходной установке кассеты со скобами 1040 в удлиненный канал 1020 узел клиновидных салазок 1250 и смещающий элемент 1520 могут располагаться в исходном положении относительно кассеты со скобами 1040 и/или удлиненного канала 1020. Исходное положение смещающего элемента 1520 может соответствовать первому набору положений таким образом, что смещающий элемент 1520 зацепляет с возможностью перемещения гильзу подшипника 1511 корпуса привода концевого эффектора 1510 и перемещает приводной стержень 1300 инструмента в функциональное положение, как описано в настоящем документе. В течение пускового такта узел клиновидных салазок 1250 и смещающий элемент 1520 могут, например, переместиться из исходного или первого набора положений. Смещающий элемент 1520 может, например, переместиться во второй набор положений. Когда смещающий элемент 1520 перемещается во второй набор положений, минуя первый набор положений, смещающий элемент 1520 может больше не зацеплять гильзу подшипника 1511 корпуса привода концевого эффектора 1510 и не удерживать приводной стержень 1300 инструмента в функциональной конфигурации. Хотя смещающий элемент 1520 может не смещать приводную шестерню 1302 инструмента приводного стержня 1300 инструмента в зацепление с третьей кольцевой шестерней 768, когда смещающий элемент 1520 перемещается во второй набор положений, паз для канала 1028, паз для упора 1103 и/или продольный паз 1046 в кассете со скобами 1040 служат для придания пусковому элементу 1200 рабочей ориентации, которая удерживает приводную шестерню 1302 инструмента приводного стержня 1300 инструмента в зубчатом зацеплении с третьей кольцевой шестерней 768 и тем самым не дает приводному стержню 1300 инструмента вернуться в нефункциональное состояние в течение пускового такта.
По меньшей мере в одном примере осуществления пусковой элемент 1200 и/или приводной стержень 1300 инструмента могут перемещать узел клиновидных салазок 1250 и/или смещающий элемент 1520 во второй набор положений в течение пускового такта. В различных примерах осуществления по завершению пускового такта пусковой элемент 1200 может возвращаться в исходное положение, однако узел клиновидных салазок 1250, включая смещающий элемент 1520, может, например, оставаться во втором наборе положений. Пусковой элемент 1200 может, например, вернуться в проксимальное положение в хирургическом концевом эффекторе 1500, а смещающий элемент 1520 может, например, остаться в дистальном положении в хирургическом концевом эффекторе 1500. Когда пусковой элемент 1200 находится в исходном положении, а смещающий элемент 1520 находится во втором наборе положений, сегмент подшипника 1304 приводного стержня 1300 инструмента может, например, сместиться в гильзе подшипника 1511 таким образом, что приводной стержень 1300 инструмента переместится в нефункциональное положение, а приводная шестерня 1302 инструмента переместится из зацепления с третьей кольцевой шестерней 768. В различных примерах осуществления приводной стержень 1300 инструмента может, например, оставаться в нефункциональном положении до тех пор, пока смещающий элемент 1520 не будет отведен в первый набор положений, и/или до тех пор, пока сменный смещающий элемент 1520 не будет помещен в первый набор положений. Например, использованную кассету со скобами 1040 извлекают из удлиненного канала 1020 и заменяют сменной кассетой со скобами 1040, которая может содержать смещающий элемент 1520, размещенный в первом наборе положений. При установке сменной кассеты со скобами 1040 в удлиненный канал 1020 ее смещающий элемент 1520 смещает приводную шестерню 1302 инструмента, например, в зацепление с третьей кольцевой шестерней 768 и, например, в функциональное положение. В таких примерах осуществления может предотвращаться повторная активация хирургического концевого эффектора 1500 без кассеты 1040 или при установке использованной кассеты 1040 в удлиненный канал 1020. Кроме того, при неправильной установке кассеты со скобами в удлиненный канал 1020, при которой смещающий элемент 1520 не перемещает приводной стержень 1300 инструмента в зубчатое зацепление с третьей кольцевой шестерней 768, активация пускового элемента 1200 невозможна.
Как описано выше, система хирургического инструмента может включать хирургический корпус, сменные узлы концевых эффекторов, присоединяемые к хирургическому корпусу для применения в течение хирургической операции, а затем отсоединяемые от корпуса после применения, и двигатель и/или активатор, выполненный с возможностью активации концевых эффекторов. В различных ситуациях хирург может выбирать из нескольких сменных концевых эффекторов для применения в течение хирургического вмешательства. Например, сначала хирург может выбрать первый сменный концевой эффектор, выполненный с возможностью сшивания и/или рассечения ткани пациента, включающий кассету со скобами длиной приблизительно 15 мм (миллиметров), например, чтобы выполнить первый разрез в ткани пациента. В таком варианте осуществления режущий скальпель и/или салазки для выталкивания скоб могут продвигаться приводным винтом приблизительно на 15 мм длины кассеты со скобами, таким образом разрезая и сшивая приблизительно 15 мм ткани пациента. Затем хирург может выбрать второй сменный концевой эффектор, также выполненный с возможностью сшивания и/или рассечения ткани пациента, который может включать кассету со скобами длиной приблизительно 30 мм, чтобы выполнить второй разрез в ткани пациента. В таком варианте осуществления режущий скальпель и/или салазки для выталкивания скоб могут продвигаться приводным винтом приблизительно на 30 мм длины кассеты со скобами, разрезая и сшивая приблизительно 30 мм ткани пациента. Хирург также может выбрать сменный концевой эффектор, выполненный с возможностью сшивания и/или рассечения ткани пациента, который может включать кассету со скобами длиной приблизительно 45 мм, чтобы выполнить разрез в ткани пациента. В таком варианте осуществления режущий скальпель и/или салазки для выталкивания скоб могут продвигаться приводным винтом приблизительно на 45 мм длины кассеты со скобами, разрезая и сшивая приблизительно 45 мм ткани пациента. Хирург также может выбрать сменный концевой эффектор, выполненный с возможностью сшивания и/или рассекания ткани пациента, который может включать кассету со скобами длиной приблизительно 60 мм, чтобы выполнить разрез в ткани пациента. В таком варианте осуществления режущий скальпель и/или салазки для выталкивания скоб могут продвигаться приводным винтом приблизительно на 60 мм длины кассеты со скобами, разрезая и сшивая приблизительно 60 мм ткани пациента. Описанные выше концевые эффекторы длиной 15 мм, 30 мм, 45 мм и/или 60 мм приводятся в качестве примера. Можно использовать другие варианты длины. В некоторых вариантах осуществления первый концевой эффектор может, например, включать кассету со скобами длиной x, второй концевой эффектор может включать кассету со скобами длиной приблизительно 2*x, третий концевой эффектор может включать кассету со скобами длиной приблизительно 3*x, и четвертый концевой эффектор может включать кассету со скобами длиной приблизительно 4*x.
В некоторых системах хирургических инструментов, использующих сменные концевые эффекторы разной длины, приводные винты в каждом из различных сменных концевых эффекторов могут быть идентичны, за исключением длины каждого приводного винта, которая соответствует разной длине соответствующего сменного концевого эффектора. Например, для сменного концевого эффектора, содержащего кассету со скобами длиной 30 мм, может потребоваться более длинный приводной винт, чем приводной винт для сменного концевого эффектора, содержащего кассету со скобами длиной 15 мм. Однако в каждом случае таких систем хирургических инструментов для каждого приводного винта с шагом резьбы и/или ходом резьбы, более подробно описанным ниже, может потребоваться, чтобы двигатель поворачивал приводной стержень на разное число оборотов, в зависимости от длины используемого концевого эффектора, до полной активации концевого эффектора. Например, в случае приводного винта, обеспечивающего пусковой такт 30 мм, для полной активации может требоваться вдвое больше оборотов, чем для приводного винта, обеспечивающего пусковой такт 15 мм. В таких системах хирургических инструментов можно использовать электронное взаимодействие между хирургическим корпусом и сменным концевым эффектором, гарантирующее, что электрический двигатель в хирургическом корпусе совершит надлежащее число оборотов с учетом длины прикрепленного сменного концевого эффектора. Например, сменный концевой эффектор может включать электронную схему, идентифицируемую системой хирургического инструмента, чтобы система хирургического инструмента могла обеспечить надлежащее число оборотов двигателя для прикрепленного концевого эффектора. В дополнение или вместо описанного выше, сменный концевой эффектор может включать датчик, определяющий момент, когда концевой эффектор будет полностью активирован. В таком варианте осуществления датчик может находиться в связи для передачи сигнала с находящимся в корпусе контроллером, выполненным с возможностью остановки двигателя при приеме соответствующего сигнала. Несмотря на приемлемость для соответствующих целей, такое электронное взаимодействие между хирургическим корпусом и сменным концевым эффектором может увеличивать сложность и/или стоимость систем хирургических инструментов.
Как описано выше, в системе хирургического инструмента можно использовать концевые эффекторы разной длины. В описанных выше системах хирургических инструментов сменные концевые эффекторы разной пусковой длины содержат пусковые винты, поворачивающиеся на разное количество оборотов, для приспособления к разным пусковым длинам. Для приспособления к разному количеству оборотов, необходимому для разных приводных винтов, двигатель, приводящий в движение приводной винт, работает больше или меньше и/или совершает большее или меньшее число оборотов, в зависимости от того, является ли пусковая длина большей или меньшей. Описанные ниже варианты осуществления концевых эффекторов позволяют системе хирургического инструмента, содержащей двигатель, выполненный с возможностью совершения фиксированного, или заданного, количества оборотов, активировать концевые эффекторы, имеющие разную пусковую длину. При эксплуатации двигателя с фиксированным количеством оборотов устраняется необходимость в определении системой хирургического инструмента длины концевого эффектора. Каждый концевой эффектор в описанных ниже вариантах осуществления включает приводной винт с шагом резьбы и/или ходом резьбы, позволяющим активирующей части концевого эффектора, такой как, например, режущий скальпель, проходить по всей длине конкретного концевого эффектора за фиксированное количество оборотов двигателя.
Как показано на ФИГ. 105, приводной винт 1700 может поворачиваться в первом направлении для перемещения режущего скальпеля 1730 концевого эффектора 1740 в дистальном направлении, обозначенном стрелкой E. В процессе применения приводной винт 1700 может поворачиваться на фиксированное, или заданное, число оборотов, чтобы продвинуть режущий скальпель 1730 на всю пусковую длину, обозначенную L на ФИГ. 105. При каждом обороте приводного винта 1700 в некоторых вариантах осуществления режущий скальпель 1730 может перемещаться в направлении, указанном стрелкой E, на величину, равную шагу резьбы, ходу резьбы и/или расстоянию между смежными витками резьбы 1708 приводного винта 1700, что более подробно описано ниже. В различных вариантах осуществления первый приводной винт может включать первый набор характеристик, определяющих первую пусковую длину, тогда как второй приводной винт может иметь второй набор характеристик, определяющих вторую пусковую длину, причем первый набор характеристик может отличаться от второго набора характеристик.
Как показано на ФИГ. 106A, 107, 108A и 109A, в дополнение к указанному выше, расстояние между витками резьбы на приводном винте может быть пропорционально углу ниток резьбы на приводном винте. Иными словами, угол, под которым расположены нитки резьбы на приводном винте, может представлять собой характеристику приводного винта, определяющую шаг резьбы и/или ход резьбы приводного винта. В вариантах осуществления, в которых приводные винты и активирующий их двигатель поворачиваются на фиксированное количество оборотов, в более длинном приводном винте для применения в более длинном концевом эффекторе можно использовать более длинный шаг резьбы и/или ход резьбы, чем в более коротком приводном винте для применения в более коротком приводном эффекторе. Приводной винт 1700, показанный на ФИГ. 106A, включает однозаходную резьбу A, расположенную под углом α относительно продольной оси 1701 на приводном винте 1700, причем резьба A имеет шаг резьбы и/или ход резьбы, имеющий длину X. На ФИГ. 106B представлен вид в поперечном сечении приводного винта 1700 и однозаходной резьбы A. В некоторых вариантах осуществления приводной винт 1700 может включать более одной нитки резьбы, как более подробно описано ниже.
На ФИГ. 107A показан приводной винт 1700', который может включать первую нитку резьбы A' и вторую нитку резьбы B'. На ФИГ. 107B представлен вид в поперечном сечении приводного винта 1700', в котором первая нитка резьбы A' и вторая нитка резьбы B' расположены со смещением по фазе приблизительно на 180° относительно друг друга на приводном винте 1700'. В различных вариантах осуществления приводной винт с первой ниткой резьбы A' и второй ниткой резьбы B' может иметь большее количество ниток резьбы на единицу длины по сравнению с приводным винтом с однозаходной резьбой A' или B'. Если приводной винт содержит более одной нитки резьбы, расстояние от витка первой нитки резьбы до смежного витка второй нитки резьбы называется «шагом резьбы». Расстояние от одного витка нитки резьбы до следующего витка той же самой нитки резьбы называется «ходом резьбы». Для приводного винта с однозаходной резьбой шаг резьбы и ход резьбы совпадают. Например, как показано на ФИГ. 107A, расстояние от витка нитки резьбы A' до смежного витка нитки резьбы B' представляет собой шаг резьбы приводного винта 1700'. Расстояние от витка нитки резьбы A' до следующего витка нитки резьбы A' представляет собой ход резьбы приводного винта 1700'. Таким образом, ход резьбы приводного винта 1700', показанного на ФИГ. 107A, равен X', а шаг резьбы равен X'/2. Приводной винт 1700, показанный на ФИГ. 106A и 106B, имеет однозаходную резьбу, и, следовательно, как шаг резьбы, так и ход резьбы будет равен X. Ход резьбы приводного винта определяет длину, которую пусковой элемент, такой как, например, режущий скальпель 1730 и/или выталкиватель скоб, пройдут за один оборот приводного винта.
Как показано на ФИГ. 107A, каждая из первой нитки резьбы A' и второй нитки резьбы B' расположена под углом β относительно продольной оси 1701 приводного винта 1700'. Угол β меньше угла α, и ход резьбы X' приводного винта 1700', показанного на ФИГ. 107A, больше хода резьбы X приводного винта 1700, показанного на ФИГ. 106A. За один поворот приводного винта 1700', режущий элемент переместится относительно приводного винта 1700' на расстояние X'. Например, ход резьбы X' может быть вдвое больше шага резьбы или хода резьбы X приводного винта 1700, показанного на ФИГ. 106A, причем, таким образом, режущий скальпель, зацепленный с приводным винтом 1700', показанным на ФИГ. 107A, будет проходить вдвое большее расстояние за один оборот приводного винта 1700', чем режущий скальпель, зацепленный с приводным винтом 1700 с ФИГ. 106A.
На ФИГ. 108A представлен приводной винт 1700'', который может включать первую нитку резьбы A'', вторую нитку резьбы B'' и третью нитку резьбы C'', каждая из которых расположена под углом γ относительно продольной оси 1701 приводного винта 1700''. На ФИГ. 108B представлен вид в поперечном сечении приводного винта 1700'', а также показаны нитки резьбы A'', B'' и C'', расположенные со смещением по фазе приблизительно 120°. Угол γ меньше угла β, показанного на ФИГ. 107A, и ход резьбы X'' приводного винта 1700'', показанного на ФИГ. 108A, больше хода резьбы X' приводного винта 1700', показанного на ФИГ. 107A. Аналогично на ФИГ. 109A представлен приводной винт 1700''', который может включать первую нитку резьбы A''', вторую нитку резьбы B''', третью нитку резьбы C''' и четвертую нитку резьбы D''', каждая из которых расположена под углом δ относительно продольной оси Z приводного винта 1700'''. На ФИГ. 109B представлен вид в поперечном сечении приводного винта 1700''', а также показаны нитки резьбы, расположенные со смещением по фазе приблизительно 90°. Угол δ меньше угла γ, и ход резьбы X''' приводного винта 1700''' больше хода резьбы приводного винта 1700'', показанного на ФИГ. 108A.
Пример системы хирургического инструмента может включать корпус, двигатель в корпусе, выполненный с возможностью совершения фиксированного числа оборотов, что приводит тому, что приводной стержень присоединенного сменного концевого эффектора совершает, например, 30 оборотов. Система хирургического инструмента также может включать множество сменных концевых эффекторов хирургических сшивающих инструментов, причем каждый из концевых эффекторов может включать, например, режущий скальпель и/или выталкиватель скоб, приводимый в движение приводным винтом. По меньшей мере в одном таком варианте осуществления первый сменный концевой эффектор может включать кассету со скобами длиной, например, 15 мм. В первом сменном концевом эффекторе можно использовать приводной винт 1700, показанный на ФИГ. 2A и 2B. Ход резьбы X может составлять, например, 0,5 мм, так что режущий скальпель и/или выталкиватель скоб может проходить кассету со скобами длиной 15 мм за 30 оборотов приводного винта 1700. Второй сменный концевой эффектор может включать кассету со скобами длиной, например, 30 мм, а также приводной винт, такой как, например, приводной винт 1700'', показанный на ФИГ. 107A и 107B. Ход резьбы X' приводного винта 1700' может составлять, например, 1,0 мм, так что режущий скальпель и/или выталкиватель скоб может проходить кассету со скобами длиной 30 мм за 30 оборотов приводного винта 1700'. Аналогично третий сменный концевой эффектор с кассетой со скобами длиной, например, 45 мм может включать приводной винт, такой как, например, приводной винт 1700'', показанный на ФИГ. 108A и 108B, с ходом резьбы X'', равным, например, 1,5 мм, так что режущий скальпель и/или выталкиватель скоб проходит платформу кассеты со скобами длиной 45 мм за 30 оборотов приводного винта 1700''. Четвертый сменный концевой эффектор с кассетой со скобами длиной, например, 60 мм может включать приводной винт, такой как, например, приводной винт 1700''', показанный на ФИГ. 109A и 109B, с ходом резьбы X''', равным, например, 2,0 мм, так что режущий скальпель и/или выталкиватель скоб проходит платформу кассеты со скобами длиной 60 мм за 30 оборотов приводного винта 1700'''.
На ФИГ. 110 представлен режущий скальпель 1730, показанный на ФИГ. 105, отделенный от оставшейся части концевого эффектора 1740. Режущий скальпель 1730 включает канал 1732, через который проходит приводной винт 1700. Боковые части 1736 образуют внутренние стенки канала 1732 и могут включать выемки, такие как, например, желоба 1734, выполненные с возможностью принимать нитки резьбы 1708 на приводном винте 1700. Желоба 1734 ориентированы под углом ε, соответствующим углу ниток резьбы 1708 на приводном винте 1700. Например, если нитки резьбы 1708 расположены под углом α, показанным на ФИГ. 106A, то угол желобов 1734 ε также будет равен углу α Соответственно, угол ε желобов 1734 может быть равен, например, углам β, δ и/или γ соответствующего используемого с ними приводного винта.
В различных вариантах осуществления, как показано на виде с пространственным разделением компонентов, показанном на ФИГ. 110, боковые части 1736 могут вставляться при сборе в окошки 1738, выполненные в стержневой части 1746 режущего скальпеля 1730. В некоторых вариантах осуществления режущий скальпель 1730 может содержать цельные боковые части. По меньшей мере в одном варианте осуществления боковые части могут иметь соответствующий угол желоба ε, соответствующий углу ниток резьбы 1708 на приводном винте 1700, который может быть образован в канале 1732, образованном в нем. Создание на режущем скальпеле 1730 желоба с соответствующим углом ε для конкретного приводного винта можно осуществить множеством способов. В некоторых вариантах осуществления можно создать общий режущий скальпель 1730, не включающий боковые части 1736, вставляемые при сборке в окошки 1738 его стержневой части 1746, причем можно сформировать разные наборы боковых частей 1736 так, чтобы можно было выбрать желаемый набор боковых частей 1736 из различных наборов боковых частей 1736, а затем собрать общий режущий скальпель 1730, который можно использовать с конкретным приводным винтом. Например, первый набор боковых частей 1736 при сборе режущего скальпеля 1730 может обеспечивать применение режущего скальпеля 1730 с первым приводным винтом, а второй набор боковых частей 1736 при сборе режущего скальпеля 1730 может обеспечивать применение режущего скальпеля 1730 со вторым приводным винтом и т.п. В некоторых других вариантах осуществления режущий скальпель 1730 может быть предусмотрен с боковыми частями, образованными с ним заодно. По меньшей мере в одном таком варианте осуществления желоба 1734 можно сформировать, например, при помощи метчика, имеющего угол ε, совпадающий с углом ниток резьбы 1708 конкретного приводного винта 1700.
На ФИГ. 111 представлен приводной винт 1700, соединенный с приводным стержнем 1750 посредством находящейся между ними промежуточной шестерни 1720. Приводной стержень 1750 поворачивается двигателем. Как описано выше, двигатель может совершать фиксированное, или заданное, число оборотов, и, таким образом, приводной стержень 1750 может поворачиваться на фиксированное число оборотов R. В некоторых вариантах осуществления количество оборотов R, совершаемых приводным стержнем 1750, может быть равно фиксированному количеству оборотов двигателя. В альтернативных вариантах осуществления количество оборотов R, совершаемых приводным стержнем 1750, может быть больше или меньше фиксированного количества оборотов двигателя. В различных вариантах осуществления одна или более шестерен, размещенных между двигателем и приводным стержнем 1750, могут воздействовать на приводной стержень 1750 таким образом, что он совершает большее или меньшее количество оборотов, чем двигатель. В некоторых вариантах осуществления приводной стержень 1750 может включать внешнюю шлицевую шестерню 1752, охватывающую дистальный конец 1754 приводного стержня 1750 и/или прикрепленную к нему. Внешняя шлицевая шестерня 1752 может зацеплять внутреннюю шлицевую шестерню 1724, выполненную в промежуточной шестерне 1720 для передачи поворота приводного стержня 1750 на промежуточную шестерню 1720. В результате, по меньшей мере в одном варианте осуществления промежуточная шестерня 1720 может совершать то же количество оборотов R, что и приводной стержень 1750.
Промежуточная шестерня 1720 может включать вторую шестерню 1722, зацепленную с шестерней 1712, охватывающей проксимальный конец 1702 приводного винта 1700 и/или прикрепленной к нему. Вторая шестерня 1722 промежуточной шестерни 1720 имеет первый диаметр D1, и шестерня 1712 на проксимальном конце 1702 приводного винта 1700 имеет второй диаметр D2. Второй диаметр D2 может отличаться от первого диаметра D1. Когда первый диаметр D1 и второй диаметр D2 отличаются, они могут образовывать передаточное отношение, отличное от 1:1. Как показано на ФИГ. 111, в некоторых вариантах осуществления диаметр D1 может быть больше диаметра D2, так что приводной винт 1700 будет совершать большее число оборотов R', чем число оборотов R, совершаемое приводным стержнем 1750 и промежуточной шестерней 1720. В альтернативных вариантах осуществления диаметр D1 может быть меньше диаметра D2, так что приводной винт 1700 будет совершать меньшее число оборотов R', чем число оборотов R, совершаемое приводным стержнем 1750 и промежуточной шестерней 1720.
Передаточное отношение между второй шестерней 1722 промежуточной шестерни 1720 и шестерней 1712 приводного винта 1700 можно установить так, чтобы приводной винт 1700 совершал определенное количество оборотов при фиксированном числе оборотов приводного стержня 1750. Если промежуточная шестерня 1722 является частью сменного узла концевого эффектора, то передаточное соотношение между промежуточной шестерней 1722 и приводным винтом 1700 в каждом сменном узле концевого эффектора может быть выбрано так, чтобы двигатель в хирургическом корпусе мог совершить фиксированное число оборотов. Например, как показано на ФИГ. 111, при условии, что приводной стержень 1750 совершает фиксированное количество оборотов, равное 30, и что сменный хирургический сшивающий инструмент включает кассету со скобами длиной 15 мм, а концевой эффектор включает приводной винт с ходом резьбы 0,25 мм, приводной винт совершит 60 оборотов, чтобы продвинуть режущий скальпель и/или выталкиватель скоб на длину 15 мм кассеты со скобами. По меньшей мере в одном варианте осуществления размер промежуточной шестерни 1720 может быть таким, чтобы вторая внутренняя шестерня 1722 имела диаметр D1, вдвое превышающий диаметр D2 внешней шестерни 1712 приводного винта 1700. Таким образом, приводной винт 1700 будет совершать 60 оборотов при 30 оборотах приводного стержня 1750. Если второй сменный хирургический сшивающий инструмент включает 30 миллиметровую кассету со скобами, то приводной винт с ходом резьбы 0,25 мм будет совершать 120 оборотов, чтобы продвинуть режущий скальпель и/или выталкиватель скоб на длину 30 мм. Размер промежуточной шестерни 1720 сменного хирургического сшивающего инструмента может быть таким, чтобы вторая внутренняя шестерня 1722 имела диаметр D1, в четыре раза превышающий диаметр D2 внешней шестерни 1712 приводного винта 1700. Таким образом, приводной винт 1700 будет совершать 120 оборотов при 30 оборотах приводного стержня 1750.
Как показано на ФИГ. 105, в некоторых вариантах осуществления пусковая траектория пускового элемента, например, режущего скальпеля 1730, может быть линейной. В некоторых вариантах осуществления пусковая траектория может быть изогнутой и/или криволинейной. В некоторых вариантах осуществления приводной винт 1708 может быть гибким, чтобы приводной винт 1708 мог следовать за боковыми движениями пускового элемента, например, по изогнутой и/или криволинейной траектории. В некоторых вариантах осуществления пусковой элемент может быть гибким или может включать по меньшей мере одну гибкую часть, что позволит частям пускового элемента, например, смещаться латерально относительно приводного винта 1708 по изогнутой и/или криволинейной траектории, в то время как оставшиеся части пускового элемента не смещаются латерально относительно приводного винта 1708. В некоторых вариантах осуществления пусковая длина может определяться расстоянием, на которое перемещается пусковой элемент по пусковой траектории, независимо от общего совокупного смещения. В различных других вариантах осуществления пусковая длина может определяться общим совокупным смещением пускового элемента, независимо от пусковой траектории.
В различных вариантах осуществления может быть предусмотрен набор для применения с системой хирургического инструмента, включающий сменные концевые эффекторы различной длины. В некоторых вариантах осуществления набор может включать набор сменных концевых эффекторов различной длины, из которых хирург может выбрать вариант для применения в хирургической операции на пациенте. Набор также может включать несколько сменных концевых эффекторов каждой длины. В некоторых вариантах осуществления набор может включать последовательность сменных концевых эффекторов различной длины, причем последовательность является заданной для конкретного хирургического вмешательства. Например, для некоторого хирургического вмешательства сначала может требоваться надрез длиной 15 мм, затем второй надрез длиной 15 мм и, наконец, надрез длиной 30 мм. Хирургический набор для данного хирургического вмешательства может включать три сменных концевых эффектора, выполненных с возможностью рассекания и сшивания ткани пациента. Первые два сменных концевых эффектора могут иметь длину приблизительно 15 мм, и третий сменный концевой эффектор может иметь длину приблизительно 30 мм.
На ФИГ. 112-117 представлен другой пример осуществления узла удлиненного стержня 2200, имеющий в нем другой пример соединительной конфигурации с возможностью быстрой разборки 2210. Например, по меньшей мере в одной форме соединительная конфигурация с возможностью быстрой разборки 2210 включает проксимальный соединительный элемент 2212, выполненный в форме проксимального сегмента внешней трубки 2214, который имеет на себе сегмент трубчатой шестерни 354, выполненный с возможностью взаимодействия с первой приводной системой 350 описанным выше способом. Как описано выше, первая приводная система 350 служит для поворота узла удлиненного стержня 2200 и функционально соединенного с ним концевого эффектора 1000 вокруг продольной оси инструмента LT-LT. Проксимальный сегмент внешней трубки 2214 имеет суженную дистальную торцевую часть 2216, выполненную с возможностью принимать на себя блокирующий сегмент трубки 2220. Конфигурация с возможностью быстрой разборки 2210 дополнительно включает дистальный соединительный элемент 2217, выполненный в форме дистальной части внешней трубки 2218, по существу аналогичной описанной выше дистальной части внешней трубки 231, за исключением того, что дистальная часть внешней трубки 2218 включает суженную проксимальную торцевую часть 2219. На конце проксимальной торцевой части 2219 дистального сегмента внешней трубки 2218 присутствует дистальная внешняя конструкция, или соединение, типа «ласточкин хвост» 2226, выполненное с возможностью приводного зацепления проксимальной внешней конструкции, или соединения, типа «ласточкин хвост» 2228, образованного на дистальной торцевой части 2216 проксимального сегмента внешней трубки 2214.
В примере осуществления, показанном на ФИГ. 112-117, используется описанный выше пример осуществления закрывающей системы 670. Соединительная конфигурация с возможностью быстрой разборки 2210 выполнена с возможностью обеспечения функционального соединения проксимальных закрывающих передаточных узлов с соответствующими дистальными передаточными узлами. Например, как показано на ФИГ. 113, узел удлиненного стержня 2200 может включать первый проксимальный закрывающий передаточный узел, выполненный в форме первого проксимального сегмента закрывающего штока 2230, и первый дистальный закрывающий передаточный узел, выполненный в форме первого дистального сегмента закрывающего штока 2240, которые выполнены с возможностью соединения друг с другом за счет соединительной конфигурации с возможностью быстрой разборки 2210. Таким образом, по меньшей мере в одном примере формы первый проксимальный сегмент закрывающего штока 2230 содержит первую закрывающую соединительную конструкцию, или соединительный сегмент, типа «ласточкин хвост» 2234, образованный на его дистальном конце 2232. Аналогично первый дистальный сегмент закрывающего штока 2240 содержит вторую закрывающую соединительную конструкцию, или соединительный сегмент, типа «ласточкин хвост» 2244, образованный на его проксимальном конце 2242, выполненный с возможностью латерального скользящего зацепления первого соединительного сегмента типа «ласточкин хвост» 2234. Как также показано на ФИГ. 113, узел удлиненного стержня 2200 может включать второй проксимальный закрывающий передаточный узел, выполненный в форме второго проксимального сегмента закрывающего штока 2250, и второй дистальный закрывающий передаточный узел, выполненный в форме второго дистального сегмента закрывающего штока 2260, которые выполнены с возможностью соединения друг с другом за счет соединительной конфигурации с возможностью быстрой разборки 2210. Таким образом, по меньшей мере в одном примере формы второй проксимальный сегмент закрывающего штока 2250 содержит третью закрывающую соединительную конструкцию, или закрывающий соединительный сегмент, типа «ласточкин хвост» 2254, образованный на его дистальном конце 2252. Аналогично второй дистальный сегмент закрывающего штока 2260 может иметь четвертую закрывающую соединительную конструкцию, или закрывающий соединительный сегмент, типа «ласточкин хвост» 2264, образованный на проксимальном конце 2262 второго дистального сегмента закрывающего штока 2260, который выполнен с возможностью латерально зацеплять третий соединительный сегмент типа «ласточкин хвост» 2254.
В показанном и других вариантах осуществления первый проксимальный сегмент закрывающего штока 2230 и второй проксимальный сегмент закрывающего штока 2250 проходят через проксимальный сегмент приводного стержня 380'. Проксимальный сегмент приводного стержня 380' содержит проксимальный поворотный передаточный узел 387', и дистальный сегмент приводного стержня 540' содержит дистальный поворотный передаточный узел 548'. Когда проксимальный поворотный передаточный узел 387' функционально соединен с дистальным поворотным передаточным узлом 548', узел приводного стержня 388' позволяет передавать поворотные управляющие движения на концевой эффектор 1000. По меньшей мере в одном примере осуществления проксимальный сегмент приводного стержня 380' по существу аналогичен проксимальному сегменту приводного стержня 380, описанному выше, за исключением того, что дистальный конец 381' проксимального сегмента приводного стержня 380' имеет образованную на нем дистальную конструкцию, или приводное соединение, типа «ласточкин хвост» 2270. Аналогично дистальный сегмент приводного стержня 540' может быть по существу аналогичен дистальному сегменту приводного стержня 540, описанному выше, за исключением того, что на его проксимальном конце 542' образована проксимальная конструкция, или приводное соединение, типа «ласточкин хвост» 2280, выполненное с возможностью зацепления с возможностью перемещения с приводным соединением типа «ласточкин хвост» 2270 через соединительную конфигурацию с возможностью быстрой разборки 2210. Первый дистальный сегмент закрывающего штока 2240 и второй дистальный сегмент закрывающего штока 2260 также могут проходить через дистальный сегмент приводного стержня 540'.
Данный пример осуществления также может включать шарнирное соединение 2300, взаимодействующее с третьим и четвертым приводными кабелями 434, 454. Как показано на ФИГ. 113, шарнирное соединение 2300 содержит проксимальную шарнирную трубку 2302, на дистальном конце 2304 которой образован проксимальный шаровой соединительный сегмент 2306. Проксимальная шарнирная трубка 2302 включает каналы 2308 для приема через них торцевых частей кабелей 434A', 434B', 454A', 454B'. На проксимальном шаровом соединительном сегменте 2306 поддерживается с возможностью перемещения проксимальный шаровой сегмент 2310. Проксимальные сегменты кабелей 434A', 434B', 454A', 454B' проходят через каналы 2308 и прикрепляются к проксимальному шаровому соединительному сегменту 2310. Проксимальная шарнирная трубка 2302, проксимальный шаровой соединительный сегмент 2310 и проксимальные сегменты кабелей 434A', 434B', 454A', 454B' могут в совокупности называться проксимальной шарнирной передаточной частью 2314.
Пример осуществления шарнирного соединения 2300 также может содержать дистальную шарнирную трубку 2320, на проксимальном конце 2322 которой образован дистальный шаровой соединительный сегмент 2324. Дистальный шаровой соединительный сегмент 2324 имеет образованную на нем первую дистальную конструкцию или соединение типа «ласточкин хвост» 2325, выполненное с возможностью зацепления с возможностью перемещения с первой проксимальной конструкцией или соединением типа «ласточкин хвост» 2307, образованным на проксимальном шаровом соединительном сегменте 2306, так чтобы при зацеплении с возможностью перемещения с первого дистального соединения типа «ласточкин хвост» 2325 и первого проксимального соединения типа «ласточкин хвост» 2307 дистальный шаровой соединительный сегмент 2324 и проксимальный шаровой соединительный сегмент 2306 образовывали узел внутреннего шара шарнира. Кроме того, шарнирное соединение 2300 дополнительно содержит дистальный шаровой сегмент 2330, который поддерживается на дистальном шаровом соединительном сегменте 2324 и который имеет образованную на нем вторую дистальную конструкцию или соединение типа «ласточкин хвост» 2332, выполненное с возможностью зацепления с возможностью перемещения со второй проксимальной конструкцией или соединением типа «ласточкин хвост» 2312 на проксимальном шаровом соединительном сегменте 2310. Дистальные сегменты кабелей 444, 445, 446, 447 прикреплены к дистальному шаровому сегменту 2340 и проходят через каналы 2328 в дистальной шарнирной трубке 2320. При соединении проксимального шарового соединительного сегмента 2310 и дистального шарового соединительного сегмента 2324 образуется шар шарнира 2340, установленный с возможностью перемещения на внутренний шар шарнира. Дистальная шарнирная трубка 2320, дистальный шаровой сегмент 2340 и дистальные сегменты кабелей 444, 445, 446, 4447 могут в совокупности называться проксимальным шарнирным передаточным узлом 2316.
Как показано на ФИГ. 115, дистальные части узла удлиненного стержня 2200 можно собрать таким образом, чтобы следующие соединительные сегменты: 2226, 2332, 2325, 2280, 2244 и 2264 удерживались в соединении друг с другом дистальным соединительным элементом 2217 или дистальной частью внешней трубки 2218, образуя дистальный соединительный узел типа «ласточкин хвост», по существу обозначенный элементом 2290. Аналогично узел удлиненного стержня 2200 можно собрать таким образом, чтобы проксимальный соединительный элемент 2212 или проксимальный сегмент внешней трубки 2214 удерживал следующие соединительные сегменты: 2228, 2312, 2307, 2270, 2234 и 2254 в соединении друг с другом, образуя проксимальный соединительный узел типа «ласточкин хвост», по существу обозначенный элементом 2292.
Концевой эффектор 1000 может функционально соединяться с узлом удлиненного стержня 2200 следующим образом. Чтобы начать прикрепление, врач перемещает блокирующий сегмент трубки 2220 в первое разблокированное положение, показанное на ФИГ. 115 и 116. Как показано на данных фигурах, на дистальном конце 2222 блокирующего сегмента трубки образован опорный сегмент 2224. В разблокированном положении опорный сегмент 2224 выступает дистально за пределы проксимального соединительного узла типа «ласточкин хвост» 2292, образуя опорную поверхность для латерального соединения дистального соединительного узла типа «ласточкин хвост» 2290 с проксимальным соединительным узлом типа «ласточкин хвост» 2292. Таким образом, врач может латерально выровнять дистальный соединительный узел типа «ласточкин хвост» 2290 с проксимальным соединительным узлом типа «ласточкин хвост» 2292 и затем способствовать боковому зацеплению дистального соединительного узла типа «ласточкин хвост» 2290 с проксимальным соединительным узлом типа «ласточкин хвост» 2292, пока дистальный соединительный узел типа «ласточкин хвост» 2290 не начнет контактировать с опорным сегментом 2224, и тогда все соответствующие дистальные и проксимальные соединительные сегменты окажутся одновременно соединенными друг с другом. Затем врач может переместить блокирующий сегмент трубки 2220 дистально во второе заблокированное положение, как показано на ФИГ. 117. В данном положении блокирующий сегмент трубки 2220 закрывает соединение с возможностью быстрой разборки 2210 и предотвращает относительное боковое перемещение между дистальным узлом типа «ласточкин хвост» 2290 и проксимальным узлом типа «ласточкин хвост» 2292.
Хотя различные примеры осуществления, описанные выше, выполнены с возможностью функционального взаимодействия и по меньшей мере частичной активации роботизированной системой, концевые эффекторы и компоненты удлиненного стержня можно эффективно применять и в сочетании с портативными инструментами. Например, на ФИГ. 118-120 представлен портативный хирургический инструмент 2400, в котором можно использовать различные компоненты и системы, описанные выше, для функциональной активации соединенного с ним концевого эффектора 1000. В примере осуществления, показанном на ФИГ. 118-120, используется соединение с возможностью быстрой разборки 2210 для соединения концевого эффектора 1000 с узлом удлиненного стержня 2402. Для обеспечения шарнирного поворота концевого эффектора 1000 вокруг шарнирного сочленения 700 проксимальная часть узла удлиненного стержня 2402 включает пример активируемого вручную привода шарнира 2410.
Как показано на ФИГ. 121-123, по меньшей мере в одном примере формы привод шарнира 2410 включает четыре ползунка шарнира, выполненных с возможностью перемещения по оси, которые установлены с возможностью поворота на проксимальном сегменте приводного стержня 380' между проксимальным сегментом внешней трубки 2214 и проксимальным сегментом приводного стержня 380'. Например, сегмент кабеля шарнира 434A' прикреплен к первому ползунку шарнира 2420, содержащему выступающий из него первый шток активатора шарнира 2422. Сегмент кабеля шарнира 434B' прикреплен ко второму ползунку шарнира 2430, диаметрально противоположному первому ползунку шарнира 2420. Второй ползунок шарнира 2430 содержит второй выступающий из него шток активатора шарнира 2432. Сегмент кабеля шарнира 454A' прикреплен к третьему ползунку шарнира 2440, содержащему выступающий из него третий шток активатора шарнира 2442. Сегмент кабеля шарнира 454B' прикреплен к четвертому ползунку шарнира 2450, диаметрально противоположному третьему ползунку шарнира 2440. Четвертый шток активатора шарнира 2452 выступает из четвертого ползунка шарнира 2450. Штоки активатора шарнира 2422, 2432, 2442, 2452 обеспечивают сообщение узлом кольца шарнира 2460 движений по управлению шарниром ползункам шарнира 2420, 2430, 2440, 2450 соответственно.
Как показано на ФИГ. 121, штоки активатора шарнира 2422, 2432, 2442, 2452 проходят с возможностью перемещения через монтажный шар 2470, установленный на одной оси с проксимальным сегментом внешней трубки 2404. По меньшей мере в одном варианте осуществления монтажный шар 2470 можно произвести сегментами, которые прикрепляются друг к другу соответствующими конфигурациями крепления (например, сваркой, адгезивом, шурупами и т.п.). Как показано на ФИГ. 109, штоки активатора шарнира 2422 и 2432 проходят через пазы 2472 в проксимальном сегменте внешней трубки 2404 и пазы 2474 в монтажном шаре 2470, обеспечивая перемещение по оси ползунков шарнира 2420, 2430 относительно них. Хотя это и не показано на фигурах, штоки активатора шарнира 2442, 2452 проходят через аналогичные пазы 2472, 2474 в проксимальном сегменте внешней трубки 2404 и в монтажном шаре 2470. Каждый из штоков активатора шарнира 2422, 2432, 2442, 2452 выступает из соответствующих пазов 2474 в монтажном шаре 2470, и это позволяет им функционально приниматься внутрь соответствующих монтажных гнезд 2466 узла кольца шарнира 2460. См. ФИГ. 122.
По меньшей мере в одном примере формы узел кольца шарнира 2460 произведен из пары кольцевых сегментов 2480, 2490, соединенных друг с другом, например, сваркой, адгезивом, защелкой, винтами и т.п., с образованием узла кольца шарнира 2460. Кольцевые сегменты 2480, 2490 в совокупности образуют монтажные гнезда 2466. Каждый из штоков активатора шарнира имеет образованный на нем монтажный шар 2468, каждый из которых выполнен с возможностью приема с возможностью перемещения в соответствующее монтажное гнездо 2466 узла кольца шарнира 2460.
В различных примерах осуществления привод шарнира 2410 может дополнительно включать пример осуществления блокирующей системы 2486, выполненной с возможностью удерживать узел кольца шарнира 2460 в активированном положении. По меньшей мере в одном примере формы блокирующая система 2486 содержит множество блокирующих отворотов, образованных на узле кольца шарнира 2460. Например, кольцевые сегменты 2480, 2490 могут быть произведены из какого-либо гибкого полимера или резиноподобного материала. Кольцевой сегмент 2480 содержит ряд образованных в нем гибких проксимальных блокирующих отворотов 2488, а кольцевой сегмент 2490 содержит ряд образованных в нем гибких дистальных блокирующих отворотов 2498. Каждый блокирующий отворот 2388 имеет по меньшей мере один образованный на нем блокирующий стопор 2389, и каждый блокирующий отворот 2398 имеет на нем по меньшей мере один блокирующий стопор 2399. Блокирующие стопоры 2389, 2399 могут функционировать таким образом, чтобы обеспечить достаточное блокирующее трение о шар шарнира, чтобы шар шарнира удерживался в определенном положении. В других примерах осуществления блокирующие стопоры 2389, 2390 выполнены с возможностью соединительного зацепления различных блокирующих лунок, образованных по внешнему периметру монтажного шара 2470.
Эксплуатация привода шарнира 2410 показана на ФИГ. 122 и 123. На ФИГ. 122 показан привод шарнира 2410 в не повернутом шарнирно положении. На ФИГ. 123 врач вручную отклоняет узел кольца шарнира 2460, в результате чего ползунок шарнира 2420 перемещается по оси в дистальном направлении DD, таким образом дистально продвигая сегмент кабеля шарнира 434A'. Такое перемещение узла кольца шарнира 2460 также приводит к осевому перемещению ползунка шарнира 2430 в проксимальном направлении, в результате чего кабель шарнира 434B оттягивается в проксимальном направлении. Такое проталкивание и оттягивание сегментов кабеля шарнира 434A', 434B' приводит к шарнирному повороту концевого эффектора 1000 относительно продольной оси инструмента LT-LT таким образом, как это описано выше. Чтобы изменить направление шарнирного поворота на обратное, врач просто меняет ориентацию узла кольца шарнира 2460 на противоположную, в результате чего ползунок шарнира 2430 будет перемещаться в дистальном направлении DD, а ползунок шарнира 2420 будет перемещаться в проксимальном направлении PD. Узел кольца шарнира 2460 можно аналогичным образом активировать, чтобы сообщить желаемые толкающие или тянущие движения сегментам кабеля шарнира 454A', 454B'. Трение, возникающее между блокирующими стопорами 2389, 2399 и внешним периметром монтажного шара, используется для того, чтобы удерживать привод шарнира 2410 в определенном положении после того, как концевой эффектор 1000 будет шарнирно повернут в желаемое положение. В альтернативных примерах осуществления, если блокирующие стопоры 2389, 2399 расположены так, чтобы приниматься в соответствующие блокирующие лунки в монтажном шаре, монтажный шар будет удерживаться в определенном положении.
В показанном и других примерах осуществления узел удлиненного стержня 2402 функционально взаимодействует с узлом рукоятки 2500. Пример осуществления узла рукоятки 2500 содержит пару сегментов корпуса рукоятки 2502, 2504, соединенных друг с другом с образованием корпуса для различных приводных компонентов и систем, как более подробно описано ниже. См., например, ФИГ. 118 и 119. Сегменты корпуса рукоятки 2502, 2504 могут соединяться винтами, защелками, адгезивом и т.п. Соединенные вместе сегменты корпуса рукоятки 2502, 2504 могут образовывать узел рукоятки 2500, который включает пистолетную рукоятку 2506.
Для обеспечения избирательного поворота концевого эффектора 1000 вокруг продольной оси инструмента LT=LT узел удлиненного стержня 2402 может взаимодействовать с первой приводной системой, по существу обозначенной элементом 2510. Приводная система 2510 включает активируемую вручную поворотную форсунку 2512, поддерживаемую с возможностью поворота на узле рукоятки 2500 таким образом, чтобы ее можно было поворачивать относительно узла рукоятки, а также перемещать по оси между заблокированным положением и разблокированным положением.
Хирургический инструмент 2400 может включать закрывающую систему 670, описанную выше, для сообщения открывающих и закрывающих движений упору 1100 концевого эффектора 1000. Однако в данном примере осуществления закрывающая система 670 активируется закрывающим спусковым механизмом 2530, шарнирно установленным на узле рамы рукоятки 2520, поддерживаемом внутри сегментов корпуса рукоятки 2502, 2504. Закрывающий спусковой механизм 2530 включает активирующую часть 2532, шарнирно установленную на шарнирном штифте 2531, который поддерживается внутри узла рамы рукоятки 2520. См. ФИГ. 124. Такой пример конфигурации обеспечивает поворотное движение к пистолетной рукоятке 2506 узла рукоятки 2500 и от нее. Как показано на ФИГ. 124, закрывающий спусковой механизм 2530 включает закрывающее звено 2534, соединенное с первым поворотным звеном и узлом шестерни 695 закрывающей проволокой 2535. Таким образом, при повороте закрывающего спускового механизма 2530 к пистолетной рукоятке 2506 узла рукоятки 2500 в активированное положение закрывающее звено 2534 и закрывающая проволока 2535 приводят к тому, что первое поворотное звено и узел шестерни 695 перемещают первый сегмент закрывающего штока 680 в дистальном направлении DD для закрытия упора.
Хирургический инструмент 2400 может дополнительно включать систему блокировки закрывающего спускового механизма 2536, которая удерживает закрывающий спусковой механизм в активированном положении. По меньшей мере в одном примере формы система блокировки закрывающего спускового механизма 2536 включает элемент блокировки закрытия 2538, шарнирно соединенный с узлом рамы рукоятки 2520. Как показано на ФИГ. 125 и 126, элемент блокировки закрытия 2538 имеет образованное на нем блокирующее плечо 2539, выполненное с возможностью перемещения поверх дугообразной части 2537 закрывающего звена 2532 при перемещении закрывающего спускового механизма 2530 к пистолетной рукоятке 2506. После поворота закрывающего спускового механизма 2530 в полностью активированное положение блокирующее плечо 2539 падает за торец закрывающего звена 2532 и позволяет закрывающему спусковому механизму 2530 вернуться в неактивированное положение. Таким образом, упор 1100 будет зафиксирован в его закрытом положении. Чтобы позволить закрывающему спусковому механизму 2530 вернуться в его неактивированное положение и тем самым вызвать перемещение упора из закрытого положения в открытое положение, врач просто поворачивает элемент блокировки закрытия 2538 до тех пор, пока его блокирующее плечо 2539 не расцепится с концом закрывающего звена 2532, тем самым позволяя закрывающему звену 2532 переместиться в неактивированное положение.
Закрывающий спусковой механизм 2532 возвращается в неактивированное положение при помощи системы возврата 2540 закрывающего механизма. Например, как показано на ФИГ. 124, один пример формы системы возврата закрывающего спускового механизма 2540 включает скользящий элемент закрывающего спускового механизма 2542, соединенный с закрывающим звеном 2534 направляющей траверсой 2544 закрывающего спускового механизма. Скользящий элемент закрывающего спускового механизма 2542 поддерживается с возможностью скольжения в полости 2522 для скользящего элемента узла рамы рукоятки 2520. Пружина возврата 2546 закрывающего спускового механизма расположена внутри полости 2520 для скользящего элемента и прилагает смещающее усилие к скользящему элементу 2542 закрывающего спускового механизма. Таким образом, когда врач активирует закрывающий спусковой механизм 2530, направляющая траверса 2544 закрывающего спускового механизма перемещает скользящий элемент закрывающего спускового механизма 2542 в дистальном направлении DD, сжимая пружину возврата 2546 закрывающего спускового механизма. При расцеплении системы блокировки закрывающего механизма 2536 и отпускании закрывающего спускового механизма 2530 пружина возврата закрывающего механизма 2546 перемещает скользящий элемент закрывающего механизма 2542 в проксимальном направлении PD, тем самым поворачивая закрывающий спусковой механизм 2530 в исходное неактивированное положение.
В хирургическом инструменте 2400 также можно использовать любые различные примеры узлов приводного стержня, описанные выше. По меньшей мере в одном примере формы в хирургическом инструменте 2400 используется вторая приводная система 2550 для сообщения поворотных управляющих движений проксимальному узлу приводного стержня 380'. См. ФИГ. 128. Вторая приводная система 2550 может включать узел двигателя 2552, который функционально поддерживается в пистолетной рукоятке 2506. Узел двигателя 2552 может получать питание от батареи 2554, съемно прикрепленной к узлу рукоятки 2500, или от источника переменного тока. Вторая приводная шестерня 2556 функционально соединена с приводным стержнем 2555 узла двигателя 2552. Вторая приводная шестерня 2556 поддерживается в зубчатом зацеплении со второй поворотной ведомой шестерней 2558, прикрепленной к проксимальному сегменту приводного стержня 380' узла приводного стержня. Например, по меньшей мере в одной форме вторая приводная шестерня 2556 также может перемещаться по оси на приводном стержне двигателя 2555 относительно узла двигателя 2552 в направлениях, обозначенных стрелкой U на ФИГ. 128. Смещающий элемент, например, спиральная пружина 2560 или аналогичный элемент, расположен между второй приводной шестерней 2556 и корпусом двигателя 2553, и предназначен для того, чтобы смещать вторую приводную шестерню 2556 на приводном стержне двигателя 2555 в зубчатое зацепление с первым сегментом шестерни 2559 на второй ведомой шестерне 2558.
Вторая приводная система 2550 может дополнительно включать узел пускового крючка 2570, который прикреплен с возможностью перемещения, например, шарнирно прикреплен к узлу рамы рукоятки 2520. По меньшей мере в одном примере формы, например, узел пускового крючка 2570 включает первый крючок 2572 поворотного привода, который взаимодействует с соответствующим переключателем/контактом (не показан), находящимся в электрической связи с узлом двигателя 2552, и активация которого приводит к тому, что узел двигателя 2552 сообщает первое поворотное приводное движение на вторую ведомую шестерню 2558. Кроме того, узел пускового крючка 2570 дополнительно включает крючок привода оттягивания 2574, способный поворачиваться относительно первого крючка поворотного привода. Крючок привода оттягивания 2574 функционально взаимодействует с переключателем/контактом (не показан), находящимся в электрической связи с узлом двигателя 2552, активация которого приводит к тому, что узел двигателя 2552 сообщает второе поворотное приводное движение второй ведомой шестерне 2558. Первое поворотное приводное движение приводит к повороту узла приводного стержня и к тому, что приводной стержень инструмента приведет к дистальному перемещению пускового элемента в концевом эффекторе 1000. С другой стороны, второе поворотное приводное движение противоположно первому поворотному приводному движению, и оно в конечном счете приведет к повороту узла приводного стержня и приводного стержня инструмента в направлении поворота, что приведет к проксимальному перемещению или оттягиванию пускового элемента в концевом эффекторе 1000.
Показанный вариант осуществления также включает активируемый вручную элемент безопасности 2580, шарнирно прикрепленный к активирующей части закрывающего спускового механизма 2532 и способный избирательно поворачиваться между первым «безопасным» положением, в котором элемент безопасности 2580 физически препятствует поворотному движению узла пускового крючка 2570, и вторым, «выключенным» положением, при котором врач может свободно поворачивать узел пускового крючка 2570. Как показано на ФИГ. 124, в активирующей части закрывающего спускового механизма 2532 предусмотрена первая лунка 2582, соответствующая первому положению элемента безопасности 2580. Когда элемент безопасности 2580 находится в первом положении, стопор (не показан) на элементе безопасности 2580 принимает первая лунка 2582. Также в активирующей части закрывающего спускового механизма 2532 предусмотрена вторая лунка 2584, соответствующая второму положению элемента безопасности 2580. Когда элемент безопасности 2580 находится во втором положении, стопор на элементе безопасности 2580 принимает вторая лунка 2582.
По меньшей мере в некоторых примерах форм хирургический инструмент 2400 может включать реверсирующую систему с механическим приводом, по существу обозначенную элементом 2590, для механического сообщения возвратного поворотного движения проксимальному сегменту приводного стержня 380' при выходе из строя узла двигателя 2552 или прекращении или перебое питания. Такая механическая реверсирующая система 2590 может быть особенно подходящим решением, например, если компоненты системы приводного стержня, функционально соединенные с проксимальным сегментом приводного стержня 380', окажутся зажаты или иным способом заблокированы таким образом, что поворот компонентов приводного стержня в обратном направлении только под воздействием двигателя станет невозможен. По меньшей мере в одном примере формы реверсирующая система с механическим приводом 2590 включает реверсирующую шестерню 2592, установленную с возможностью поворота на стержне 2524A, образованном на узле рамы рукоятки 2520, в зубчатом зацеплении со вторым сегментом шестерни 2562 на второй ведомой шестерне 2558. См. ФИГ. 126. Таким образом, реверсирующая шестерня 2592 свободно поворачивается на стержне 2524A, когда вторая ведомая шестерня 2558 поворачивает проксимальный сегмент приводного стержня 380' узла приводного стержня.
В различных примерах форм механическая реверсирующая система 2590 дополнительно включает активируемый вручную выталкиватель 2594 в форме плеча рычага 2596. Как показано на ФИГ. 129 и 130, плечо рычага 2596 включает направляющую траверсу 2597, имеющую проходящие через нее удлиненные пазы 2598. Стержень 2524A проходит через паз 2598A, а второй противоположный стержень 2598B, образованный на узле корпуса рукоятки 2520, проходит через другой удлиненный паз, прикрепляя с возможностью перемещения к узлу корпуса плечо рычага 2596. Кроме того, плечо рычага 2596 имеет образованную на нем пластину активатора 2597, которая может зубчатым образом зацеплять реверсирующую шестерню 2592. Предусмотрен стопор или зацеп, который удерживает плечо рычага 2596 в неактивированном положении до тех пор, пока врач не приложит достаточного усилия для его активации. Это предотвращает случайную активацию в перевернутом состоянии. В других вариантах осуществления можно использовать пружину, смещающую плечо рычага в неактивированное состояние. В различных примерах осуществления механическая реверсирующая система 2590 дополнительно включает кнопку оттягивания скальпеля 2600, установленную с возможностью перемещения в узле рамы рукоятки 2520. Как показано на ФИГ. 129 и 130, кнопка оттягивания скальпеля 2600 включает расцепляющую кромку 2602, выполненную с возможностью зацепления верхней части второй приводной шестерни 2556. Кнопка оттягивания скальпеля 2600 сдвигается в расцепленное положение пружиной оттягивания скальпеля 2604. В расцепленном положении расцепляющая кромка 2602 смещена из зацепления со второй приводной шестерней 2556. Таким образом, до тех пор пока врачу не понадобится активировать механическую реверсирующую систему 2590 путем нажатия кнопки оттягивания скальпеля 2600, вторая приводная шестерня 2556 будет находиться в зубчатом зацеплении с первым сегментом шестерни 2559 второй ведомой шестерни 2558.
Когда врачу необходимо сообщить обратное поворотное приводное движение проксимальному сегменту приводного стержня 380', врач нажимает кнопку оттягивания скальпеля 2600 и расцепляет первый сегмент шестерни 2559 на второй ведомой шестерне 2558 со второй приводной шестерней 2556. После этого врач начинает сообщать поворотное одностороннее движение активируемому вручную шкиву 2594, в результате чего находящаяся на нем пластина шестерни 2597 двигает реверсирующую шестерню 2592. Реверсирующая шестерня 2592 находится в зубчатом зацеплении со вторым сегментом шестерни 2562 на второй ведомой шестерне 2558. Продолжающееся одностороннее движение активируемого вручную шкива 2594 приводит к сообщению обратного поворотного движения второму сегменту шестерни 2562 и в конечном счете проксимальному сегменту приводного стержня 380'. Врач может продолжать одностороннее движение шкива 2594 столько, сколько это необходимо для полного освобождения или обратного движения связанного(-ых) с ним компонента(-ов) концевого эффектора. После сообщения необходимого количества обратного поворотного движения проксимальному сегменту приводного стержня 380' врач отпускает кнопку оттягивания скальпеля 2600 и шкив 2594 в их соответствующие исходные или неактивированные положения, в которых пластина 2597 выведена из зацепления с реверсирующей шестерней 2592 и вторая приводная шестерня 2556 снова находится в зубчатом зацеплении с первым сегментом шестерни 2559 на второй ведомой шестерне 2558.
Хирургический инструмент 2400 также можно использовать с концевым эффектором 1000, включающим поворотную трансмиссию 750, как более подробно описано выше. Как описано выше, когда узел приводного стержня находится в первом осевом положении, сообщение ему поворотного движения приводит к повороту всего концевого эффектора 1000 вокруг продольной оси инструмента LT-LT дистально к шарнирному сочленению 700. Когда узел приводного стержня находится во втором положении, сообщение ему поворотного движения приводит к повороту приводного стержня инструмента, который в конечном итоге приводит к активации пускового элемента внутри концевого эффектора 1000.
В хирургическом инструменте 2400 можно использовать сдвигающую систему 2610 для избирательного осевого смещения проксимального сегмента приводного стержня 380', которая перемещает шестерню стержня 376 в зубчатое зацепление с первой поворотной ведомой шестерней 374 и из него. Например, проксимальный сегмент приводного стержня 380' поддерживается с возможностью перемещения в узле рамы рукоятки 2520 таким образом, что проксимальный сегмент приводного стержня 380' может перемещаться в нем по оси и поворачиваться. По меньшей мере в одном примере формы сдвигающая система 2610 дополнительно включает направляющую траверсу сдвигателя 2612, поддерживаемую с возможностью скольжения в узле рамы рукоятки 2520. См. ФИГ. 124 и 127. Проксимальный сегмент приводного стержня 380' имеет на себе пару колец 386 (показаны на ФИГ. 124 и 128), расположенных таким образом, чтобы смещение направляющей траверсы сдвигателя 2612 в узле рамы рукоятки 2520 приводило к осевому перемещению проксимального сегмента приводного стержня 380'. По меньшей мере в одной форме сдвигающая система 2610 дополнительно включает узел кнопки сдвигателя 2614, который функционально взаимодействует с направляющей траверсой сдвигателя 2612 и проходит через паз 2505 в сегменте корпуса рукоятки 2504 узла рукоятки 2500. См. ФИГ. 135 и 136. Пружина сдвигателя 2616 установлена с узлом рамы рукоятки 2520 таким образом, что зацепляется с проксимальным сегментом приводного стержня 380'. См. ФИГ. 127 и 134. Пружина 2616 выполнена с возможностью обеспечивать врачу слышимый щелчок и тактильную обратную связь при скользящем перемещении узла кнопки сдвигателя 2614 между первым осевым положением, показанным на ФИГ. 135, в котором поворот узла приводного стержня приводит к повороту концевого эффектора 1000 вокруг продольной оси инструмента LT-LT относительно шарнирного сочленения 700 (показано на ФИГ. 67), и вторым осевым положением, показанным на ФИГ. 136, в котором поворот узла приводного стержня приводит к осевому перемещению пускового элемента в концевом эффекторе (показано на ФИГ. 66). Таким образом, такая конфигурация позволяет врачу легко изменять с возможностью скольжения положение кнопки узла кнопки сдвигателя 2614, удерживая при этом узел рукоятки 2500.
На ФИГ. 137-147 показано шарнирное сочленение 2700, выполненное с возможностью блокировки, которое в одном примере осуществления по существу идентично описанному выше шарнирному сочленению 700, за исключением описанных ниже различий. В одном примере осуществления шарнирное сочленение 2700 блокируется и разблокируется системой блокировки шарнирного поворота 2710. Шарнирное сочленение 2700 включает проксимальную гнездовую трубку 702, прикрепленную к дистальному концу 233 дистальной части внешней трубки 231 и образующую в ней проксимальное шаровое гнездо 704. См. ФИГ. 137. Проксимальный шаровой элемент 706, прикрепленный к промежуточному сегменту шарнирной трубки 712, удерживается с возможностью перемещения внутри проксимального шарового гнезда 704 в проксимальной гнездовой трубке 702. Как показано на ФИГ. 137, проксимальный шаровой элемент 706 имеет центральный канал для привода 708, позволяющий ввести через него дистальный сегмент приводного стержня 540. Кроме того, проксимальный шаровой элемент 706 имеет в себе четыре шарнирных канала 710, способствующие введению через них дистальных сегментов кабелей 444, 445, 446, 447. Как дополнительно показано на ФИГ. 137, промежуточный сегмент шарнирной трубки 712 имеет образованное в нем промежуточное шаровое гнездо 714. Промежуточное шаровое гнездо 714 выполнено с возможностью поддержки в себе с возможностью перемещения шара 722 концевого эффектора, образованного на соединительной трубке концевого эффектора 720. Дистальные сегменты кабелей 444, 445, 446, 447 проходят через каналы для кабелей 724, образованные в шаре 722 концевого эффектора и прикрепляются к нему утолщениями 726, которые принимаются в соответствующие каналы 728 в шаре 722 концевого эффектора. Можно использовать и другие крепежные конфигурации для прикрепления дистальных сегментов кабелей 444, 445, 446, 447 к шару 722 концевого эффектора.
Как показано на ФИГ. 137, один пример формы системы блокировки шарнирного поворота 2710 включает блокирующую проволоку, или элемент, 2712, проходящий через дистальную часть внешней трубки 231 узла удлиненного стержня и проксимальную гнездовую трубку 702. Блокирующая проволока 2712 имеет проксимальный конец 2720, который прикреплен к передаточному диску 2722, который функционально поддерживается в части рукоятки 2500 (по существу обозначена пунктирной линией на ФИГ. 137). Например, передаточный диск 2722 установлена на шпинделе стержня 2724, соединенном со ступицей 2726, образованной в рукоятке 2500. Кабель активатора или проволока 2730 прикрепляется к передаточному диску 2722, и врач может активировать его вручную (т.е. толкать или тянуть). В других вариантах осуществления, в которых хирургический инструмент прикреплен к роботизированной системе, кабель активатора 2730 может быть выполнен с возможностью приема управляющих движений от роботизированной системы с активацией передаточного диска 2722.
Как показано на ФИГ. 143-146, на дистальном конце 2715 блокирующей проволоки 2712 образована пара разблокирующих клиньев 2714, 2716. Первый разблокирующий клин 2714 выполнен с возможностью функционального взаимодействия с концами 2742, 2744 дистального блокирующего кольца 2740, установленного на промежуточную шарнирную трубку 712. В нормальном «блокированном» состоянии, показанном на ФИГ. 143, дистальное блокирующее кольцо 2740 прилагает распространяющееся по окружности блокирующее или сжимающее усилие к промежуточной шарнирной трубке 712, зажимая промежуточную шарнирную трубку 712 на шаре 722 концевого эффектора для предотвращения ее перемещения внутри гнезда 714. Как показано на ФИГ. 143-146, концы 2742, 2744 дистального блокирующего кольца 2740 сужаются, образуя коническое или V-образное отверстие 2746, выполненное с возможностью принимать между ними первый разблокирующий клин 2714.
Как дополнительно показано на ФИГ. 143-146, второй блокирующий клин 2716 выполнен с возможностью взаимодействия с концами 2752, 2754 проксимального блокирующего кольца 2750, установленного на проксимальную гнездовую трубку 702. В нормальном «блокированном» состоянии, показанном на ФИГ. 143, проксимальное блокирующее кольцо 27450 прилагает распространяющееся по окружности блокирующее или сжимающее усилие к проксимальной гнездовой трубке 702, зажимая проксимальную гнездовую трубку 702 на проксимальном шаровом элементе 706 для предотвращения ее перемещения в проксимальном шаровом гнезде 704. Как показано на ФИГ. 143-146, концы 2752, 2754 проксимального блокирующего кольца 2750 сужаются, образуя коническое или V-образное отверстие 2756, выполненное с возможностью принимать между ними второй разблокирующий клин 2716.
Когда шарнирное сочленение 2700 разблокировано активацией системы блокировки шарнирного поворота 2710, концевой эффектор 1000 может избирательно шарнирно поворачиваться различными описанными выше способами путем активации дистальных сегментов кабелей 444, 445, 446, 447. Активацию системы блокировки шарнирного поворота 2710 можно понять со ссылкой на ФИГ. 138, 139 и 143-146. На ФИГ. 143 показаны положения первого и второго разблокирующих клиньев 2714, 2716 относительно дистального и проксимального блокирующих колец 2740, 2750. В данном состоянии блокирующее кольцо 2740 препятствует перемещению шара 722 концевого эффектора внутри гнезда 714, а блокирующее кольцо 2750 препятствует перемещению проксимального шарового элемента 706 внутри гнезда 704. Для разблокирования шарнирного сочленения 2700 активирующий кабель 2726 тянут в проксимальном направлении PD, что в конечном итоге приводит к тому, что блокирующая проволока 2712 выталкивается в дистальном направлении DD в положение, показанное на ФИГ. 144. Как показано на ФИГ. 144, первый разблокирующий клин 2714 переместился дистально между концами 2742, 2744 дистального блокирующего кольца 2740, раздвинув кольцо 2740 и убрав сжимающее усилие, прилагаемое к промежуточной шарнирной трубке 712, что позволяет шару 722 концевого эффектора перемещаться внутри гнезда 714. Аналогично второй разблокирующий клин 2716 переместился дистально между концами 2752, 2754 проксимального блокирующего кольца 2750, раздвинув кольцо 2750 и убрав сжимающее усилие, прилагаемое к проксимальной гнездовой трубке 702, что позволяет проксимальному шаровому элементу 706 перемещаться внутри гнезда 704. В данном разблокированном положении шарнирную систему можно активировать путем сообщения пусковых движений дистальным сегментам кабелей 444, 445, 446, 447 описанным выше способом с шарнирным поворотом концевого эффектора 1000, как показано на ФИГ. 138 и 139. Например, на ФИГ. 143 и 144 представлено положение первого и второго блокирующих клиньев 2714, 2716, когда концевой эффектор 1000 шарнирно повернут в положение, показанное на ФИГ. 138. Аналогично на ФИГ. 145 и 146 представлено положение первого и второго блокирующих клиньев 2714, 2716, когда концевой эффектор 1000 шарнирно повернут в положение, показанное на ФИГ. 139. После того как врач шарнирно повернул концевой эффектор в желаемое положение, он (или роботизированная система) сообщает выталкивающее движение активирующему кабелю, поворачивая передаточный диск 2722 и перемещая блокирующую проволоку 2712 в положение, показанное на ФИГ. 143, 145, тем самым позволяя блокирующим кольцам 2740, 2750 пружинным способом перейти в сжатое или блокированное положение, чтобы удерживать концевой эффектор 1000 в заблокированном положении.
На ФИГ. 148-156 представлен другой вариант осуществления шарнирного сочленения 2800, которое в одном примере формы по существу идентично концевому эффектору 1000, за исключением описанных ниже различий. Концевой эффектор 2800 включает узел упора 2810, который открывается и закрывается сообщением ему поворотного закрывающего движения. Узел упора 2810 шарнирно поддерживается на удлиненном канале 2830 с возможностью избирательного перемещения между открытым положением (ФИГ. 148 и 149) и закрытым положением (ФИГ. 150-153). Удлиненный канал 2830 может быть по существу идентичен описанному выше удлиненному каналу 1020 за исключением описанных ниже отличий. Например, в показанном варианте осуществления удлиненный канал 2830 имеет образованный на нем корпус соединителя концевого эффектора 2832, который может соединяться с соединительной трубкой концевого эффектора 720 кольцевым подшипником 734, как описано выше. Как показано на ФИГ. 148, корпус соединителя концевого эффектора 2832 функционально поддерживает в себе узел поворотной трансмиссии 2860.
Как показано на ФИГ. 148 и 149, узел упора 2810 включает пару опорных роликов 2812 упора (на ФИГ. 148 показан только один опорный ролик), которые принимаются с возможностью перемещения в соответствующие пазы для опорных роликов 2814 в удлиненном канале 2830. Нижняя сторона узла упора 2810 дополнительно содержит образованный на нем уклон открытия упора 2816 для поворотного зацепления с шарнирным штифтом упора 1201' на пусковом элементе 1200'. Пусковой элемент 1200' может быть по существу идентичен описанному выше пусковому элементу 1200 за исключением указанных отличий. Кроме того, узел упора 2810 дополнительно включает закрывающий штифт 2818, предназначенный для функционального зацепления с поворотным закрывающим стержнем 2910, принимающим закрывающие движения от узла поворотной трансмиссии 2860, что более подробно описано ниже. Пусковой элемент 1200' установлен с возможностью поворота на приводной стержень 1300 инструмента, который поддерживается с возможностью поворота внутри удлиненного канала 2830, который выполнен с возможностью поддержки в себе кассеты со скобами (не показана). Приводной стержень 1300 инструмента имеет образованный на нем сегмент подшипника 1304, поддерживаемый с возможностью поворота в гильзе подшипника 2834, образованной в корпусе соединителя концевого эффектора 2832.
В показанном примере осуществления узел поворотной трансмиссии 2860 включает поворотный приводной стержень 2870, который проходит в продольном направлении через узел удлиненного стержня и функционально взаимодействует с монтажной частью для инструмента (если концевой эффектор 2800 активируется роботизированной системой) или пусковым крючком узла рукоятки (если концевой эффектор 2800 активируется вручную). В тех вариантах осуществления, в которых используется шарнирное сочленение, часть поворотного приводного стержня 2870, проходящая через шарнирное сочленение 700, может содержать любой из узлов гибкого приводного стержня, описанных в настоящем документе. Если шарнирное сочленение не используется, поворотный приводной стержень может быть жестким. Как лучше всего показано на ФИГ. 148 и 149, поворотный приводной стержень 2870 имеет поворотную приводную головку 2872, образованную на нем или прикрепленную к нему, которая имеет образованную на нем первую кольцевую шестерню 2874. Кроме того, поворотная приводная головка 2872 дополнительно имеет вторую кольцевую шестерню 2876, образованную на ней для избирательного зубчатого зацепления с шестерней сдвигателя 2882, прикрепленной к поворотному стержню сдвигателя 2880.
Стержень сдвигателя 2880 может включать любой из описанных выше узлов поворотного приводного стержня и проходит через узел удлиненного стержня, чтобы функционально взаимодействовать с монтажной частью для инструмента 300 (если концевой эффектор 2800 приводится в движение роботизированной системой) или с узлом рукоятки (если концевой эффектор управляется вручную). В любом случае стержень сдвигателя 2800 выполнен с возможностью приема продольных сдвигающих движений для продольного перемещения шестерни сдвигателя 2882 внутри поворотной приводной головки 2872 и поворотных приводных движений для поворота шестерни сдвигателя 2882, как более подробно описано ниже.
Как дополнительно показано на ФИГ. 148 и 149, узел поворотной трансмиссии 2860 дополнительно включает узел передаточных шестерен 2890, имеющий корпус 2892, часть которого поддерживается с возможностью поворота внутри полости 2873 в поворотной приводной головке 2872. Корпус 2892 имеет шпиндель 2894, проходящий с возможностью поворота через монтажное отверстие для шпинделя 2838, выполненное в опорной стенке 2836 корпуса соединителя концевого эффектора 2832. Корпус 2892 дополнительно имеет кольцевую шестерню сдвигателя 2896, образованную в нем для избирательного зубчатого зацепления с шестерней сдвигателя 2882 на поворотном стержне сдвигателя 2880. Передающая шестерня 2900 установлена на шпинделе передающей шестерни 2902, который выступает из корпуса 2892 и принимается с возможностью скольжения в дугообразный паз 2840 в опорной стенке 2836. См. ФИГ. 155 и 156. Передающая шестерня 2900 находится в зубчатом зацеплении с первой кольцевой шестерней 2874, образованной в поворотной приводной головке 2872. Как показано на ФИГ. 153-156, дугообразный паз 2840 имеет расположенный по центру гибкий стопор 2842, выступающий в него. Стопор 2842 образован на перемычке 2844, образованной освобождающим стопор пазом 2846, образованным смежно с дугообразным пазом 2840, как показано на ФИГ. 155.
Поворотный закрывающий стержень 2910 имеет часть подшипника 2912, которая поддерживается с возможностью поворота в соответствующем отверстии в опорной стенке 2836. Поворотный закрывающий стержень 2910 дополнительно имеет закрывающую приводную шестерню 2914, предназначенную для избирательного зубчатого зацепления с передающей шестерней 2900. Приводной стержень 1300 инструмента также имеет приводную шестерню 1302 инструмента, предназначенную для избирательного зубчатого зацепления с передающей шестерней 2900.
Ниже описана эксплуатация концевого эффектора 2800 со ссылкой на ФИГ. 148-155. На ФИГ. 148 и 149 показан концевой эффектор 2800, в котором узел упора 2810 находится в открытом положении. Для перемещения узла упора 2810 в закрытое положение, показанное на ФИГ. 150, стержень сдвигателя 2880 размещают таким образом, чтобы шестерня сдвигателя 2882 зубчато зацеплялась с кольцевой шестерней сдвигателя 2896 в корпусе 2892. Стержень сдвигателя 2880 может поворачиваться, приводя к повороту корпуса 2892 и вводя передающую шестерню 2900 в зубчатое зацепление с закрывающей приводной шестерней 2914 на закрывающем стержне 2910. См. ФИГ. 153. В данном положении блокирующий стопор 2842 удерживает шпиндель передающей шестерни 2902 в данном положении. После этого поворотный приводной стержень 2870 поворачивается, сообщая поворотное движение передающей шестерне 2900, что в конечном итоге приводит к повороту закрывающего стержня 2910. При повороте закрывающего стержня 2910 поворотная часть шпинделя 2916, которая находится в зацеплении с закрывающим штифтом 2818 на узле упора 2810, заставит узел упора 2810 переместиться проксимально, после чего узел упора 2810 повернется на поворотном штифте упора 1201', находящемся на пусковом элементе 1200'. Таким образом узел упора 2810 повернется в закрытое положение, показанное на ФИГ. 150. Когда врачу необходимо переместить пусковой элемент 1200' дистально по удлиненному каналу 2830, стержень сдвигателя 2880 снова поворачивается, чтобы повернуть шпиндель передающей шестерни 2902 в положение, показанное на ФИГ. 154. Блокирующий стопор 2842 снова удерживает шпиндель передающей шестерни 2902 в данном положении. Затем поворотный приводной стержень 2870 поворачивается, сообщая поворотное движение на приводную шестерню 1302 на приводном стержне 1300 инструмента. Поворот приводного стержня 1300 инструмента в одном направлении воздействует на пусковой элемент 1200' таким образом, что он приводится в движение в дистальном направлении DD. Поворот приводного стержня 1300 инструмента в противоположном направлении приведет к оттягиванию пускового элемента 1200' в проксимальном направлении PD. Таким образом, в тех вариантах осуществления, в которых пусковой элемент 1200' выполнен с возможностью рассечения и установки скоб и расположен внутри кассеты со скобами, установленной в удлиненный канал 2830, после приведения в движение пускового элемента 1200' в самое дистальное положение в удлиненном канале 2830 поворотное приводное движение, сообщенное приводному стержню 1300 инструмента узлом поворотного приводного стержня 2870, становится обратным и оттягивает пусковой элемент 1200' назад в его исходное положение, показанное на ФИГ. 150. Для освобождения целевой ткани из концевого эффектора 2800 врач опять поворачивает стержень сдвигателя 2800, снова вводя передающую шестерню 2900 в зубчатое зацепление с приводной шестерней 2914 на закрывающем приводном стержне 2910. Затем передающей шестерне 2900 сообщается обратное поворотное движение поворотным приводным стержнем 2870, в результате чего закрывающий приводной стержень 2910 поворачивает приводной шпиндель 2916, который тем самым перемещает узел упора 2810 дистально, в результате чего он поворачивается в открытое положение, показанное на ФИГ. 148 и 149. Когда врачу необходимо повернуть весь концевой эффектор 2800 вокруг продольной оси инструмента LT-LT, стержень сдвигателя смещают в продольном направлении, вводя шестерню сдвигателя 2882 в одновременное зубчатое зацепление со второй кольцевой шестерней 2876 на поворотной приводной головке 2872 и кольцевой шестерней сдвигателя 2896 на корпусе передающей шестерни 2892, как показано на ФИГ. 152. После этого поворот поворотного приводного стержня 2880 воздействует на весь концевой эффектор 2800 таким образом, что он поворачивается вокруг продольной оси инструмента LT-LT относительно соединительной трубки концевого эффектора 720.
На ФИГ. 157-170 представлен другой вариант осуществления концевого эффектора 3000, в котором для открытия и закрытия узла упора 3010 используются вытягивающие движения. Узел упора 3010 поддерживается с возможностью перемещения на удлиненном канале 3030 с возможностью избирательного перемещения между открытым положением (ФИГ. 168 и 169) и закрытым положением (ФИГ. 157, 160 и 170). Удлиненный канал 3030 может быть по существу идентичен описанному выше удлиненному каналу 1020 за исключением описанных ниже отличий. Удлиненный канал 3030 может быть соединен с корпусом привода концевого эффектора 1010 описанным выше способом. Корпус привода концевого эффектора 1010 также может быть соединен с соединительной трубкой концевого эффектора 720 кольцевым подшипником 734, как описано выше. Как показано на ФИГ. 157, корпус привода концевого эффектора 1010 может поддерживать приводную конфигурацию 748 и поворотную трансмиссию 750, как описано выше.
Как показано на ФИГ. 160, узел упора 3010 включает пару опорных роликов упора 3012 (на ФИГ. 160 показан только один опорный ролик), принимаемых с возможностью перемещения в соответствующие пазы для роликов 3032, образованные в удлиненном канале 3030. Нижняя сторона узла упора 2810 дополнительно имеет прорези открытия упора 3016, образованные на ней с возможностью поворотного зацепления с верхними ребрами 1208' на пусковом элементе 3100'. См. ФИГ. 168. Пусковой элемент 3100 может быть по существу идентичен описанному выше пусковому элементу 1200 за исключением указанных отличий. В показанном варианте осуществления концевой эффектор 3000 дополнительно включает пружину упора 3050, которая выполнена с возможностью приложения смещающего усилия к опорным роликам 3012 упора. Одна форма пружины упора 3050 показана на ФИГ. 159. Как показано на данной фигуре, пружину упора 3050 можно произвести из металлической проволоки, и она может иметь два противоположных пружинных рычага 3052, которые выполнены с возможностью создания нагрузки на опорные ролики 3012 упора, когда опорные ролики упора принимаются в соответствующие пазы для опорных роликов 3032. Кроме того, как дополнительно показано на ФИГ. 159, пружина упора 3050 имеет две образованные в ней монтажных петли 3054, которые выполнены с возможностью поддерживаться с возможностью перемещения на соответствующих штифтах пружины 3034, образованных на удлиненном канале 3030. См. ФИГ. 158. Как более подробно описано ниже, пружина упора 3050 выполнена с возможностью поворота на штифтах пружины 3034 внутри удлиненного канала 3030. Как лучше всего показано на ФИГ. 158, часть 3035 каждой боковой стенки удлиненного канала является утопленной, чтобы обеспечить место для перемещения пружины упора 3050.
Как показано на ФИГ. 157 и 160-170, концевой эффектор 3000 дополнительно включает закрывающую трубку 3060, поддерживаемую с возможностью перемещения на удлиненном канале 3030 для избирательного продольного перемещения по нему. Для обеспечения продольного перемещения закрывающей трубки 3060 вариант осуществления, показанный на ФИГ. 157 и 160-170, включает закрывающий соленоид 3070, соединенный с закрывающей трубкой 3060 плечом рычажного механизма 3072, шарнирно закрепленным с закрывающей трубкой 3030 или иным образом прикрепленным к ней. При активации соленоида плечо рычажного механизма 3072 приводится в движение в дистальном направлении, перемещая закрывающую трубку 3060 дистально в конец удлиненного канала 3030. При дистальном перемещении закрывающей трубки 3060 она воздействует на узел упора 3010 таким образом, что он поворачивается в закрытое положение. В альтернативном варианте осуществления соленоид может представлять собой кольцевой соленоид, установленный на дистальном конце корпуса привода концевого эффектора 1010. Закрывающую трубку можно произвести из металлического материала, притягиваемого или отталкиваемого магнитной силой кольцевого соленоида, в результате чего обеспечивается продольное перемещение закрывающей трубки.
По меньшей мере в одной форме концевой эффектор 3060 дополнительно включает уникальную систему блокировки упора 3080 для удержания узла упора 3010 зафиксированным в закрытом положении на целевой ткани. В одной форме, как показано на ФИГ. 157, система блокировки упора 3080 включает блокирующую упор планку 3082, которая проходит в поперечном направлении через удлиненный канал 3030 таким образом, чтобы ее концы принимались в соответствующие окошки для блокирующей планки 3036, образованные в удлиненном канале 3030. См. ФИГ. 158. Как показано на ФИГ. 161, когда закрывающая трубка 3060 находится в самом дистальном «закрытом» положении, концы блокирующей планки 3082 выступают латерально через окошки для блокирующей планки 3036 и проходят за проксимальный конец закрывающей трубки 3060, предотвращая ее проксимальное перемещение из положения. Блокирующая планка 3082 выполнена с возможностью зацепления контакта соленоида 3076, поддерживаемого в корпусе привода концевого эффектора 1010. Контакт соленоида 3076 соединен проводом с управляющей системой, которая управляет соленоидом 3070. Управляющая система включает источник электрической энергии, представленный аккумуляторной батареей или иным источником электрической энергии в роботизированной системе или узле рукоятки, в зависимости от того, какой вариант используется.
Пусковой элемент 3100 установлен с возможностью поворота на приводной стержень 1300 инструмента, который поддерживается с возможностью поворота внутри удлиненного канала 2830, который выполнен с возможностью поддерживать в себе кассету со скобами (не показана). Приводной стержень 1300 инструмента имеет образованный на нем сегмент подшипника 1304, который поддерживается с возможностью поворота в гильзе подшипника 2834, образованной в корпусе соединителя концевого эффектора 2832, и функционально взаимодействует с поворотной трансмиссией 750 описанным выше способом. Поворот приводного стержня 1300 инструмента в одном направлении приводит к приведению в движение пускового элемента 3100 дистально по удлиненному каналу 3030, а поворот приводного стержня 1300 инструмента в противоположном направлении поворота приведет к оттягиванию пускового элемента 1200'' в проксимальном направлении PD. Как показано на ФИГ. 157 и 160-170, пусковой элемент 3100 имеет активирующую планку 3102, выполненную с возможностью зацепления блокирующей планки 3082, как будет более подробно описано ниже.
Система блокировки упора 3080 дополнительно включает тяговый узел упора 3090 для избирательного тягового перемещения упора в заклинивающее фиксирующее зацепление с закрывающей трубкой 3060 при перемещении закрывающей трубки 3060 в самое дистальное положение, при котором дистальный конец закрывающей трубки 3060 контактирует с буртом упора 3013, образованном на узле упора 3010. В одной форме тяговый узел упора 3090 включает пару тяговых кабелей упора 3092, прикрепленных к проксимальному концу узла упора 3010 и выступающих проксимально через узел удлиненного стержня к монтажной части для инструмента или к узлу рукоятки, в зависимости от используемого варианта. Тяговые кабели 3092 можно прикрепить к механизму активатора в узле рукоятки или соединить с одной из приводных систем на монтажной части для инструмента, которая выполнена с возможностью приложения натяжения к кабелям 3092.
Ниже описана эксплуатация концевого эффектора 3000. На ФИГ. 168 и 169 показан узел упора 3010 в открытом положении. На ФИГ. 168 представлен пусковой элемент 3100 в самом проксимальном положении, в котором в удлиненный канал 3030 можно установить новую кассету со скобами (не показана). Закрывающая трубка 3060 также находится в самом проксимальном неактивированном положении. Также, как показано на ФИГ. 167, когда пусковой элемент 3100 находится в самом проксимальном положении, активирующая планка 3102 смещает блокирующую планку в зацепление с контактом соленоида 3076, что позволяет активировать соленоид для выполнения следующей закрывающей последовательности. Таким образом, для запуска процесса закрытия активируют поворотный приводной стержень 752, который перемещает пусковой элемент 3100 в его исходное положение, показанное на ФИГ. 169. В данном положении активирующая планка 3102 достаточно переместилась в проксимальном направлении, чтобы блокирующая планка 3082 переместилась из зацепления с контактом соленоида 3076, в результате чего при подаче питания на управляющую схему соленоида звено соленоида 3072 продвигается. Затем на соленоид 3070 подают питание автоматически или при помощи тумблера или иного управляющего механизма в узле рукоятки, в результате чего закрывающая трубка 3060 перемещается дистально до тех пор, пока дистальный конец закрывающей трубки 3060 не станет контактировать с буртом 3013 на узле упора 3010, в результате чего узел упора повернется в закрытое положение на пусковом элементе 1200'', как показано на ФИГ. 162. Как показано на данной фигуре, блокирующая планка 3082 расположена так, чтобы предотвращать перемещение закрывающей трубки 3060 в проксимальном направлении. В данном положении врач прилагает натяжение к тяговым кабелям 3092, которые тянут проксимальный конец узла упора 3010 в заклинивающее зацепление с закрывающей трубкой 3060, фиксируя узел упора 3010 в закрытом положении. После этого пусковой элемент 1200'' можно привести в движение в дистальном направлении через ткань, зажатую в концевом эффекторе 3000. После этого пусковой процесс будет завершен. Приводной стержень инструмента поворачивают в противоположном направлении, возвращая пусковой элемент 3100 в его исходное положение, причем активирующая планка 3102 снова контактирует с блокирующей планкой 3082 и отгибает ее, перемещая в контакт с контактом соленоида 3076 и вытягивая концы блокирующей планки 3082 в окошки 3036 удлиненного канала 3030. В данном положении при подаче питания на управляющую систему соленоида соленоид 3070 оттягивает закрывающую трубку 3060 в проксимальном направлении в исходное, или открытое, положение, показанное на ФИГ. 167 и 168. При проксимальном перемещении закрывающей трубки 3060 из зацепления с узлом стержня 3010 пружина упора 3050 прилагает смещающее усилие на опорные ролики 3012 упора, смещая узел упора в открытое положение, показанное на ФИГ. 168.
На ФИГ. 171-178 представлен другой пример осуществления узла удлиненного стержня 3200, имеющий в нем другой пример соединительной конфигурации с возможностью быстрой разборки 3210. Например, по меньшей мере в одной форме соединительная конфигурация с возможностью быстрой разборки 3210 включает проксимальный соединительный элемент 3212, выполненный в форме проксимального сегмента внешней трубки 3214, который в одной конфигурации может иметь на себе сегмент трубчатой шестерни 354, выполненный с возможностью взаимодействия с первой приводной системой 350 описанным выше способом, когда устройство должно иметь роботизированное управление. Однако в другом варианте осуществления проксимальный сегмент внешней трубки 3214 может взаимодействовать с активируемой вручную поворотной форсункой 2512, установленной на узле рукоятки описанным выше способом. Как описано выше, первая приводная система 350 при роботизированном управлении или поворотная форсунка 2512 в портативной конфигурации служат для поворота узла удлиненного стержня 3200 и функционально соединенного с ним концевого эффектора вокруг продольной оси инструмента LT-LT. См. ФИГ. 171. Проксимальный сегмент внешней трубки 3214 имеет суженную дистальную торцевую часть 3216, выполненную с возможностью принимать на себя блокирующее кольцо.
В примере осуществления, показанном на ФИГ. 171-178, узел удлиненного стержня 3200 включает проксимальный сегмент приводного стержня 380'', который может быть по существу идентичен описанному выше проксимальному сегменту приводного стержня 380, за исключением описанных выше отличий, и может быть выполнен с возможностью приема поворотных и осевых управляющих движений от роботизированной системы или узла рукоятки различными описанными в настоящем документе способами. Показанный вариант осуществления может использоваться с шарнирным сочленением 700, как описано выше, и может включать шарнирные кабели 434 и 454, соединенные с управляющими приводами шарнира различными способами, описанными в настоящем документе. Предусмотрено использование проксимального материала-наполнителя 3220 внутри проксимального сегмента внешней трубки 3214 для осевой поддержки торцевых частей шарнирных кабелей 434A, 434B, 454A, 454B. Каждая торцевая часть шарнирного кабеля 434A, 434B, 454A, 454B проходит через соответствующий проксимальный канал шарнира 3222, проходящий через проксимальный материал-наполнитель 3220. Каждая торцевая часть шарнирного кабеля 434A, 434B, 454A, 454B дополнительно содержит прикрепленную к ней проксимальную скобу шарнира 3224, выполненную с возможностью скольжения внутри соответствующего канала шарнира 3222. Проксимальные скобы шарнира 3224 можно произвести из металлического или полимерного материала, и каждая содержит пару гибких плеч 3226, каждое из которых имеет образованный на нем крепежный зацеп 3228. Аналогично проксимальный сегмент приводного стержня 380'' принимается с возможностью перемещения в канал для стержня 3230 в проксимальном материале-наполнителе 3220. На нем присутствует соединительный зажим 3240 приводного стержня. В одном примере формы на соединительном зажиме 3240 приводного стержня образована центральная трубчатая соединительная часть 3242 и два гибких плеча 3244 зажима, каждый из которых имеет на себе крепежный зацеп 3248.
Как дополнительно показано на ФИГ. 171, 172 и 176-178, конфигурация с возможностью быстрой разборки 3210 дополнительно включает дистальный соединительный элемент 3250 в форме дистального элемента внешней трубки 3252, по существу аналогичного описанной выше дистальной части внешней трубки 231, за исключением того, что дистальный элемент внешней трубки 3252 включает суженную проксимальную торцевую часть 3254. Дистальный сегмент внешней трубки 3252 функционально соединяется с концевыми эффекторами 1000 различных описанных в настоящем документе типов и включает дистальный сегмент приводного стержня 540'', который может быть по существу аналогичен описанному выше дистальному сегменту приводного стержня 540, за исключением указанных ниже отличий. Предусмотрено использование дистального материала-наполнителя 3260 внутри дистального сегмента внешней трубки 3252 для осевой поддержки дистальных сегментов шарнирных кабелей 444, 445, 446, 447. Каждый дистальный сегмент шарнирного кабеля 444, 445, 446, 447 проходит через соответствующий дистальный канал шарнира 3262, проходящий через дистальный материал-наполнитель 3260. Каждый дистальный сегмент шарнирного кабеля 444, 445, 446, 447 дополнительно имеет дистальный шарнирный штыковой штырь 3270, выполненный с возможностью скольжения между плечами зажима 3226 соответствующего проксимального шарнирного зажима 3224. Каждый дистальный шарнирный штыковой штырь 3270 выполнен с возможностью удерживающего зацепления за крепежные зацепы 3228 на соответствующих плечах зажима 3226. Аналогично дистальный сегмент приводного стержня 540'' принимается с возможностью перемещения в дистальный канал для стержня 3264 в дистальном материале-наполнителе 3260. Дистальный штыковой штырь приводного стержня 3280 прикреплен к проксимальному концу дистального сегмента приводного стержня 540'' таким образом, что выступает проксимально за пределы дистальных шарнирных штыковых штырей 3270. На ФИГ. 172 представлено (пунктирными линиями) положение дистального штыкового штыря 3280 приводного стержня относительно дистальных шарнирных штыковых штырей 3270. Дистальный штыковой штырь 3280 приводного стержня выполнен с возможностью удерживающего зацепления за крепежные зацепы 3248 на соответствующих плечах 3244 соединительного зажима приводного стержня 3240.
Как показано на ФИГ. 171-178, пример соединительной конфигурации с возможностью быстрой разборки 3210 дополнительно включает блокирующее кольцо с возможностью перемещения по оси 3290, установленное с возможностью перемещения на суженную проксимальную торцевую часть 3254 дистального сегмента внешней трубки 3252. Как лучше всего показано на ФИГ. 174, одна форма блокирующего кольца 3290 включает внешнюю блокирующую гильзу 3292, размер которой позволяет принять ее с возможностью скольжения на суженные части 3216, 3254 проксимального сегмента внешней трубки 3214 и дистального сегмента внешней трубки 3254 соответственно. Внешняя блокирующая гильза 3292 соединена с центральным блокирующим корпусом 3294 мостиком 3295. Мостик 3295 выполнен с возможностью скольжения через дистальный паз 3255 в суженной части 3254 дистального сегмента внешней трубки 3254, а также проксимальный паз 3217 в суженной части 3216 проксимального сегмента внешней трубки 3214, которая принимается с возможностью скольжения в суженную проксимальную торцевую часть 3254 дистального сегмента внешней трубки 3252 и также может проходить с возможностью скольжения в суженную часть 3216 проксимального сегмента внешней трубки 3214. Как также показано на ФИГ. 174, центральный блокирующий корпус 3294 имеет множество каналов 3296 для приема через них шарнирных штырей и зажимов. Аналогично центральный блокирующий корпус 3294 имеет центральный канал 3298 для приводного стержня для приема в него с возможностью перемещения дистального сегмента 540'' приводного стержня.
Ниже описан пример осуществления соединительной конфигурации с возможностью быстрой разборки 3210. Как прежде всего показано на ФИГ. 171 и 172, дистальный соединительный элемент 3250 выравнивают в аксиальном направлении с проксимальным соединительным элементом 3212 так, чтобы мостик 3295 был выровнен с пазом 3217 в суженной части 3216 проксимального сегмента внешней трубки 3214, а дистальный штыковой штырь 3280 приводного стержня был выровнен по оси с центральной трубчатой соединительной частью 3242 на проксимальном соединительном зажиме 3240 приводного стержня. После этого дистальный соединительный элемент 3250 приводят в стыкующееся зацепление с проксимальным соединительным элементом 3212, в результате чего дистальный штыковой штырь 3280 приводного стержня входит в центральный трубчатый сегмент 3214 и в конечном итоге входит в удерживающее зацепление с крепежными зацепами 3248 на проксимальном соединительном зажиме 3240 приводного стержня. Такое действие также воздействует на каждый дистальный соединительный шарнирный штыковой штырь 3270 таким образом, что он входит в удерживающее соединение с крепежными зацепами 3228 на проксимальных шарнирных соединительных зажимах 3224, как показано на ФИГ. 176. Следует понимать, что при вставке дистального штыкового штыря 3280 приводного стержня между плечами зажима 3244 плечи зажима 3244 отгибаются наружу до тех пор, пока крепежные зацепы 3248 не зацепят буртик 3281 на штыре 3280. Аналогично при вставке каждого из дистальных шарнирных штыковых штырей 3270 между соответствующими соединительными плечами 3226 соединительные плечи 3226 отгибаются наружу до тех пор, пока крепежные зацепы 3228 не зацепят буртик 3271 на штыре 3270. После того как дистальный сегмент 540'' приводного стержня будет соединен с проксимальным сегментом 380'' приводного стержня и дистальные сегменты 444, 445, 446, 447 шарнирных кабелей будут соединены с торцевыми частями 434A, 434B, 454A, 454B шарнирных кабелей соответственно, пользователь может передвинуть внешнюю блокирующую гильзу 3292 проксимально в положение, показанное на ФИГ. 177 и 178. В данном положении центральный блокирующий корпус 3294 не позволяет плечам зажима 3244, 3226 отогнуться наружу и, следовательно, фиксирует дистальный соединительный элемент 3250 на проксимальном соединительном элементе 3212. Для отсоединения дистального соединительного элемента 3250 от проксимального соединительного элемента 3212 пользователь перемещает внешнюю блокирующую гильзу 392 в положение, показанное на ФИГ. 175 и 176, и после этого оттягивает друг от друга соединительные элементы 3250, 3212. При приложении к соединительным элементам 3250, 3212 усилия, разделяющего их в разные стороны, плечи зажима 3244 и 3226 получают возможность выйти из зацепления с дистальным штыковым штырем приводного стержня и дистальными шарнирными штыковыми штырями соответственно.
Не имеющие ограничительного характера примеры
Один пример формы представляет собой хирургический инструмент для применения с роботизированной системой, включающей узел привода инструмента, функционально соединенный с блоком управления роботизированной системы, управление которым осуществляется по входным командам оператора, и который выполнен с возможностью роботизированно генерировать выходные движения. По меньшей мере в одном примере формы хирургический инструмент включает приводную систему, выполненную с возможностью взаимодействия с соответствующей частью узла привода инструмента роботизированной системы для приема роботизированно сгенерированных выходных движений. Узел приводного стержня функционально взаимодействует с приводной системой и выполнен с возможностью приема роботизированно сгенерированных выходных движений от приводной системы и сообщения управляющих движений хирургическому концевому эффектору, функционально взаимодействующему с узлом приводного стержня. Активируемая вручную управляющая система функционально взаимодействует с узлом приводного стержня и избирательно сообщает генерируемые вручную управляющие движения узлу приводного стержня.
Применительно к другому общему примеру формы предлагается хирургический инструмент для применения с роботизированной системой, которая включает узел привода инструмента, функционально связанный с блоком управления роботизированной системы, управление которым осуществляется по входным командам оператора и который выполнен с возможностью сообщения по меньшей мере одного поворотного выходного движения по меньшей мере одной поворачиваемой корпусной части, поддерживаемой на узле привода инструмента. По меньшей мере в одном примере формы хирургический инструмент включает хирургический концевой эффектор, содержащий по меньшей мере одну составную часть, выполненную с возможностью избирательного перемещения между первым и вторым положениями относительно по меньшей мере одной другой его составной части в ответ на сообщение ему управляющих движений. Узел удлиненного стержня функционально соединен с хирургическим концевым эффектором и содержит по меньшей мере одну часть, приводимую в движение шестернями, находящейся в функциональном соединении по меньшей мере с одной составной частью, выполненной с возможностью избирательного перемещения. Монтажная часть для инструмента функционально соединяется с узлом удлиненного стержня и выполнена с возможностью функционального взаимодействия с узлом привода инструмента при соединении. По меньшей мере один пример формы дополнительно содержит монтажную часть для инструмента, содержащую ведомый элемент, поддерживаемый с возможностью поворота на монтажной части для инструмента и предназначенный для приводного зацепления с соответствующей одной из по меньшей мере одной поворачиваемой корпусной части узла привода инструмента для приема от нее соответствующих поворотных выходных движений. Приводная система находится в функциональном зацеплении с приводным элементом для сообщения ему роботизированно сгенерированных пусковых движений, в результате чего соответствующая одна из по меньшей мере одной части, приводимая в движение шестернями, сообщает по меньшей мере одно управляющее движение на компонент, выполненный с возможностью избирательного перемещения. Активируемая вручную реверсирующая система функционально взаимодействует с узлом удлиненного стержня и избирательно сообщает ему генерируемые вручную управляющие движения.
В соответствии с другим общим примером формы предлагается хирургический инструмент для применения с роботизированной системой, включающей узел привода инструмента, функционально соединенный с блоком управления роботизированной системы, управление которым осуществляется по входным командам оператора и который выполнен с возможностью роботизированно генерировать поворотные выходные движения. По меньшей мере в одном примере формы хирургический инструмент содержит поворотную приводную систему, выполненную с возможностью взаимодействия с соответствующей частью узла привода инструмента роботизированной системы для приема роботизированно сгенерированных поворотных выходных движений. Узел поворотного приводного стержня функционально взаимодействует с поворотной приводной системой и выполнен с возможностью приема роботизированно сгенерированных поворотных выходных движений от поворотной приводной системы и сообщения поворотных приводных движений хирургическому концевому эффектору, функционально взаимодействующему с узлом поворотного приводного стержня. Активируемая вручную реверсирующая система функционально взаимодействует с узлом поворотного приводного стержня и избирательно сообщает генерируемые вручную поворотные приводные движения узлу поворотного приводного стержня.
Другой пример формы содержит хирургическое сшивающее устройство, включающее узел удлиненного стержня, имеющего дистальный конец и образующего продольную ось инструмента. Устройство дополнительно включает концевой эффектор, содержащий узел удлиненного канала, который включает часть, которая выполнена с возможностью функционально поддерживать в себе кассету со скобами. Упор поддерживается с возможностью перемещения относительно узла удлиненного канала. Хирургическое сшивающее устройство дополнительно содержит поворотное соединение, соединяющее узел удлиненного канала с дистальным концом узла удлиненного стержня и обеспечивающее избирательный поворот узла удлиненного канала вокруг продольной оси инструмента относительно дистального конца узла удлиненного стержня.
Другой пример формы содержит узел поворотного опорного соединения для соединения первой части хирургического инструмента со второй частью хирургического инструмента. По меньшей мере в одном примере формы узел поворотного опорного соединения содержит первую кольцеобразную канавку в первой части и вторую кольцеобразную канавку во второй части, которая предназначена для существенного совмещения с первой кольцеобразной канавкой при соединении второй части с первой частью. Внутри совмещенных первой и второй кольцеобразных канавок поддерживается кольцеобразный подшипник.
Применительно к другому общему примеру формы предлагается узел поворотного опорного соединения для соединения хирургического концевого эффектора с узлом удлиненного стержня хирургического инструмента. По меньшей мере в одном примере формы узел поворотного опорного соединения содержит имеющую цилиндрическую форму соединительную часть на хирургическом концевом эффекторе. По периметру соединительной части предусмотрена первая кольцеобразная канавка. На удлиненном стержне предусмотрено гнездо, размер которого позволяет ему принимать в себя цилиндрическую соединительную часть таким образом, что цилиндрическая соединительная часть может свободно поворачиваться относительно гнезда. Вторая кольцеобразная канавка предусмотрена во внутренней стенке гнезда и предназначена для существенного совмещения с первой кольцеобразной канавкой при приеме цилиндрической соединительной части внутрь гнезда. В гнезде предусмотрено окошко, находящееся в связи со второй кольцеобразной канавкой. Кольцеобразный элемент подшипника имеет свободный конец, который выполнен с возможностью вставки через окошко в совмещенные первую и вторую кольцеобразные канавки.
Применительно к другому общему примеру формы предлагается способ поворотного соединения первой части хирургического инструмента со второй частью хирургического инструмента. В различных примерах форм способ включает формирование первой кольцеобразной канавки в первой части и формирование второй кольцеобразной канавки во второй части. Способ дополнительно включает вставку первой части во вторую часть, так чтобы первая и вторая кольцеобразные канавки по существу совместились, и вставку кольцеобразного подшипника в совмещенные первую и вторую кольцеобразные канавки.
Другой пример формы содержит узел приводного стержня для хирургического инструмента, который включает множество сцепленных с возможностью перемещения соединительных сегментов, соединенных с образованием полой трубки. Гибкий вторичный ограничительный элемент образует гибкое ограничительное зацепление с множеством сцепленных с возможностью перемещения соединительных сегментов для удержания сцепленных соединительных сегментов в сцепленном зацеплении с возможностью перемещения и с одновременным изгибанием узла приводного стержня.
В соответствии с другим общим примером формы предлагается композитный узел приводного стержня для хирургического инструмента, включающий множество сцепленных с возможностью перемещения соединительных сегментов, которые вырезаны в полой трубке лазером и которые имеют дистальный конец и проксимальный конец. Гибкий вторичный ограничительный элемент образует гибкое ограничительное зацепление с множеством сцепленных с возможностью перемещения соединительных сегментов для удержания сцепленных соединительных сегментов в сцепленном зацеплении с возможностью перемещения и с одновременным изгибанием узла приводного стержня.
В соответствии с другим общим примером формы предлагается узел приводного стержня для хирургического инструмента, содержащий множество соединенных друг с другом с возможностью перемещения соединительных сегментов, причем по меньшей мере некоторые соединительные сегменты содержат шаровую соединительную часть, образованную шестью по существу дугообразными поверхностями. Размер гнездовой части позволяет принимать в себя с возможностью перемещения шаровую соединительную часть соседнего соединительного сегмента. Через каждую шаровую соединительную часть проходит полый канал, образуя проход через узел приводного стержня. Узел приводного стержня может дополнительно включать гибкий вторичный ограничительный элемент, который образует гибкое ограничительное зацепление с множеством соединенных друг с другом с возможностью перемещения соединительных сегментов для удержания соединительных сегментов в соединенном зацеплении с возможностью перемещения и с одновременным изгибанием узла приводного стержня.
Другой пример формы включает способ формирования узла гибкого приводного стержня для хирургического инструмента. В различных примерах осуществления способ включает получение полого стержня и вырезание лазером множества соединенных друг с другом с возможностью перемещения соединительных сегментов в полом стержне. Способ дополнительно включает установку на полый стержень вторичного ограничительного элемента для удержания соединенных друг с другом с возможностью перемещения соединительных сегментов в соединенном зацеплении с возможностью перемещения и с одновременным обеспечением изгибания узла приводного стержня.
Применительно к другому примеру формы предлагается способ формирования узла гибкого приводного стержня для хирургического инструмента. По меньшей мере в одном примере осуществления способ включает получение полого стержня и вырезание лазером множества соединенных друг с другом с возможностью перемещения соединительных сегментов в полом стержне. Каждый соединительный сегмент содержит пару противоположных утолщений, причем каждое утолщение имеет часть с сужающимся внешним периметром, которая принимается в соответствующее гнездо, имеющее часть с сужающимися внутренними стенками, которая взаимодействует с частью с сужающимся внешним периметром соответствующего утолщения, в результате чего утолщение удерживается в ней с возможностью перемещения в гнезде.
Другой общий пример формы содержит поворотную приводную конфигурацию для хирургического инструмента с функционально соединяемым с ним хирургическим концевым эффектором. В одном примере формы поворотная приводная конфигурация включает поворотную приводную систему, которая выполнена с возможностью генерирования поворотных приводных движений. Узел приводного стержня функционально взаимодействует с поворотной приводной системой и выполнен с возможностью избирательного перемещения по оси между первым положением и вторым положением. Поворотная трансмиссия функционально взаимодействует с узлом приводного стержня и хирургическим концевым эффектором таким образом, что, когда узел приводного стержня находится в первом осевом положении, сообщение одного из поворотных приводных движений узлу приводного стержня поворотной приводной системой воздействует на поворотную трансмиссию таким образом, что она сообщает первое поворотное управляющее движение хирургическому концевому эффектору, а когда узел приводного стержня находится во втором осевом положении, сообщение поворотного приводного движения узлу приводного стержня поворотной приводной системой воздействует на поворотную трансмиссию таким образом, что она сообщает второе поворотное управляющее движение хирургическому концевому эффектору.
Применительно к другому общему примеру формы предлагается хирургический инструмент для применения с роботизированной системой, включающей узел привода инструмента, функционально соединенный с блоком управления роботизированной системы, управление которым осуществляется по входным командам оператора и который выполнен с возможностью генерирования выходных движений. По меньшей мере в одном примере формы хирургический инструмент содержит монтажную часть для инструмента, выполненную с возможностью функционального взаимодействия с частью роботизированной системы. Поворотная приводная система функционально поддерживается монтажной частью для инструмента и взаимодействует с узлом привода инструмента, принимая от него соответствующие выходные движения. Узел удлиненного стержня функционально проходит от монтажной части для инструмента и включает узел приводного стержня, функционально взаимодействующий с поворотной приводной системой. Узел приводного стержня выполнен с возможностью избирательного перемещения по оси между первым положением и вторым положением. Хирургический инструмент дополнительно содержит хирургический концевой эффектор, соединенный с возможностью поворота с узлом удлиненного стержня для избирательного поворота относительно него. Поворотная трансмиссия функционально взаимодействует с узлом приводного стержня и хирургическим концевым эффектором таким образом, что, когда узел приводного стержня находится в первом осевом положении, сообщение одного из поворотных приводных движений узлу приводного стержня поворотной приводной системой воздействует на поворотную трансмиссию таким образом, что она сообщает первое поворотное управляющее движение хирургическому концевому эффектору, а когда узел приводного стержня находится во втором осевом положении, сообщение поворотного приводного движения узлу приводного стержня поворотной приводной системой воздействует на поворотную трансмиссию таким образом, что она сообщает второе поворотное управляющее движение хирургическому концевому эффектору.
Применительно к другому общему примеру формы предлагается хирургический инструмент, содержащий узел рукоятки и приводной двигатель, который функционально поддерживается в узле рукоятки. Узел удлиненного стержня функционально проходит из узла рукоятки и включает узел приводного стержня, функционально взаимодействующий с приводным двигателем и выполненный с возможностью избирательного перемещения по оси между первым положением и вторым положением. Хирургический концевой эффектор соединен с возможностью поворота с узлом удлиненного стержня для избирательного поворота относительно него. Поворотная трансмиссия функционально взаимодействует с узлом приводного стержня и хирургическим концевым эффектором таким образом, что, когда узел приводного стержня находится в первом осевом положении, сообщение поворотного приводного движения узлу приводного стержня приводным двигателем воздействует на поворотную трансмиссию таким образом, что она сообщает первое поворотное управляющее движение хирургическому концевому эффектору, а когда узел приводного стержня находится во втором осевом положении, сообщение поворотного приводного движения узлу приводного стержня приводным двигателем воздействует на поворотную трансмиссию таким образом, что она сообщает второе поворотное управляющее движение хирургическому концевому эффектору.
Различные примеры осуществления также содержат систему дифференциальной блокировки для хирургического инструмента, который включает хирургический концевой эффектор, активируемый узлом поворотного приводного стержня, который выполнен с возможностью перемещения по оси между множеством отдельных осевых положений. По меньшей мере в одной форме система дифференциальной блокировки содержит по меньшей мере одну удерживающую конструкцию на узле поворотного приводного стержня, соответствующую каждому из отдельных осевых положений. По меньшей мере один элемент блокировки функционально поддерживается относительно узла поворотного приводного стержня с возможностью удерживающего зацепления по меньшей мере с одной удерживающей конструкцией, когда узел поворотного приводного стержня перемещается в связанные с ней отдельные осевые положения.
Применительно к другому общему примеру формы предлагается система дифференциальной блокировки для хирургического инструмента, включающего хирургический концевой эффектор, активируемый узлом поворотного приводного стержня, который выполнен с возможностью перемещения между первым осевым положением и вторым осевым положением. По меньшей мере в одном примере формы система дифференциальной блокировки содержит дифференциальный корпус, функционально взаимодействующий с узлом поворотного приводного стержня и хирургическим концевым эффектором. По меньшей мере один подпружиненный элемент блокировки функционально поддерживается дифференциальным корпусом в удерживающем зацеплении с первой частью узла поворотного приводного стержня, когда узел поворотного приводного стержня находится в первом осевом положении, и по меньшей мере один подпружиненный элемент блокировки дополнительно выполнен с возможностью удерживающего зацепления второй части узла поворотного приводного стержня, когда узел поворотного приводного стержня находится во втором осевом положении.
Применительно к другому общему примеру формы предлагается система дифференциальной блокировки для хирургического инструмента, включающего хирургический концевой эффектор, активируемый узлом поворотного приводного стержня, который выполнен с возможностью перемещения между первым осевым положением и вторым осевым положением. По меньшей мере в одном примере формы система дифференциальной блокировки содержит дифференциальный корпус, функционально взаимодействующий с узлом поворотного приводного стержня и хирургическим концевым эффектором. Предусмотрен по меньшей мере один пружинный элемент на части узла поворотного приводного стержня, причем каждый пружинный элемент образует первое удерживающее положение, соответствующее первому осевому положению узла поворотного приводного стержня, и второе удерживающее положение, соответствующее второму осевому положению узла поворотного приводного стержня. Элемент блокировки функционально поддерживается дифференциальным корпусом и соответствует каждому из по меньшей мере одного пружинного элемента для удерживающего зацепления с ним таким образом, чтобы элемент блокировки входил в удерживающее зацепление соответствующего пружинного элемента в первом удерживающем положении, когда узел поворотного приводного стержня находится в первом осевом положении, и элемент блокировки входил в удерживающее зацепление с соответствующим пружинным элементом во втором удерживающем положении, когда узел поворотного приводного стержня находится во втором осевом положении
Различные другие примеры осуществления содержат хирургический инструмент, включающий концевой эффектор и проксимальный поворотный передаточный узел, функционально соединяемый с источником поворотных и осевых управляющих движений. Проксимальный поворотный передаточный узел выполнен с возможностью продольного смещения в ответ на сообщение ему осевых управляющих движений. Хирургический инструмент дополнительно включает дистальный поворотный передаточный узел, функционально соединенный с концевым эффектором для сообщения ему поворотных управляющих движений. Проксимальный осевой передаточный узел функционально соединен с другим источником осевых управляющих движений. Дистальный осевой передаточный узел функционально соединен с концевым эффектором для сообщения ему осевых управляющих движений. Инструмент дополнительно содержит соединительную конфигурацию для одновременного прикрепления/отсоединения проксимального поворотного передаточного узла с дистальным передаточным поворотным узлом и проксимального осевого передаточного узла с дистальным осевым передаточным узлом.
Применительно к другому общему аспекту предлагается соединительная конфигурация для прикрепления концевого эффектора, включающего множество дистальных передаточных узлов, выполненных с возможностью сообщения множества управляющих движений концевому эффектору, к соответствующим проксимальным передаточным узлам, соединяющимся с источником приводных движений. В одном примере формы соединительная конфигурация содержит проксимальную крепежную конструкцию на дистальном конце каждого проксимального передаточного узла, а также проксимальный соединительный элемент, который выполнен с возможностью функционально поддерживать в себе каждый проксимальный передаточный узел таким образом, чтобы проксимальные крепежные конструкции удерживались на нем по существу в выровненном для соединения положении. На проксимальном конце каждого дистального передаточного узла предусмотрена дистальная крепежная конструкция. Каждая дистальная крепежная конструкция выполнена с возможностью функционального зацепления проксимальной крепежной конструкции на дистальном конце соответствующего проксимального передаточного узла при приведении в соединительное зацепление с ней. Дистальный соединительный элемент функционально соединен с концевым эффектором и выполнен с возможностью функциональной поддержки в себе каждого из дистальных передаточных узлов для удержания на нем дистальных крепежных конструкций по существу в выровненном для соединения положении. Блокирующее кольцо выполнено с возможностью перемещения из разблокированного положения, в котором дистальные передаточные узлы можно отсоединить от соответствующих проксимальных передаточных узлов, в заблокированное положение, в котором дистальные передаточные узлы удерживаются в зацеплении с соответствующими проксимальными передаточными узлами.
Применительно к другому общему аспекту предлагается хирургический инструмент, включающий концевой эффектор, выполненный с возможностью осуществления хирургических действий в ответ на сообщенные ему приводные движения. Пример формы инструмента также дополнительно включает источник приводных движений и первый проксимальный передаточный узел, функционально взаимодействующий с источником приводных движений и принимающий от него соответствующие первые приводные движения. Второй проксимальный передаточный узел функционально взаимодействует с источником приводных движений и принимает от него соответствующие вторые приводные движения. Первый дистальный передаточный узел функционально взаимодействует с концевым эффектором и выполнен с возможностью приема соответствующих первых приводных движений от первого проксимального передаточного узла при функциональном соединении с ним. Второй дистальный передаточный узел функционально взаимодействует с концевым эффектором и выполнен с возможностью приема соответствующих вторых приводных движений от второго проксимального передаточного узла при функциональном соединении с ним. Инструмент дополнительно содержит соединительную конфигурацию, содержащую первый соединительный элемент, который функционально поддерживает в себе первый и второй проксимальные передаточные узлы. Соединительная конфигурация дополнительно включает второй соединительный элемент, который функционально поддерживает в себе первый и второй дистальные передаточные узлы и предназначен для выравнивания в аксиальном направлении с первым соединительным элементом таким образом, чтобы при выравнивании в аксиальном направлении второго соединительного элемента с первым соединительным элементом первый дистальный передаточный узел выравнивался в аксиальном направлении с первым проксимальным передаточным узлом для функционального зацепления с ним, а второй дистальный передаточный узел выравнивался в аксиальном направлении со вторым проксимальным передаточным узлом для функционального зацепления с ним. Блокирующее кольцо установлено с возможностью перемещения на первый и второй соединительные элементы и выполнено с возможностью перемещения между разблокированным положением, в котором первый и второй дистальные передаточные узлы могут быть отсоединены от первого и второго проксимальных передаточных узлов соответственно, и заблокированным положением, в котором первый и второй дистальные передаточные узлы удерживаются в функциональном зацеплении с первым и вторым проксимальными передаточными узлами соответственно.
В соответствии с другим общим аспектом предлагается хирургическая кассета, включающая корпус кассеты, образующий траекторию для функционального приема пускового элемента хирургического инструмента через нее. Хирургическая кассета дополнительно включает выравнивающий элемент, который функционально поддерживается в корпусе кассеты и выполнен с возможностью перемещения пускового элемента из нефункциональной конфигурации, в которой пусковой элемент не выровнен с траекторией, в функциональную конфигурацию, в которой пусковой элемент выровнен с траекторией, при приведении в движение пускового элемента в контакт с ним.
В соответствии с другим общим аспектом предлагается концевой эффектор для хирургического инструмента. По меньшей мере в одной форме концевой эффектор содержит опорный элемент, содержащий паз и смежную с ним блокирующую прорезь. Концевой эффектор дополнительно содержит пусковой элемент, который выполнен с возможностью перемещения между нефункциональной конфигурацией и функциональной конфигурацией, причем пусковой элемент выравнивается с пазом и конструктивно предусматривает поступательное перемещение по пазу, когда он находится в функциональной конфигурации, и причем пусковой элемент зацепляется за блокирующую прорезь и выводится из выравнивания с пазом, когда он находится в нефункциональной конфигурации.
Другой пример осуществления содержит хирургический инструмент, который включает удлиненный канал, выполненный с возможностью съемной поддержки в себе кассеты. По меньшей мере в одной форме кассета содержит корпус кассеты и выравнивающий элемент, поддерживаемый с возможностью перемещения внутри корпуса кассеты для перемещения из первого положения во второе положение в ней. Хирургический инструмент также содержит пусковой элемент, который функционально поддерживается относительно удлиненного канала для перемещения между исходным положением и конечным положением при сообщении ему пусковых движений. Пусковой элемент не способен перемещаться из исходного положения в конечное положение до тех пор, пока пусковой элемент не будет находиться в функциональном зацеплении с выравнивающим элементом в корпусе кассеты.
Другой пример осуществления содержит концевой эффектор для хирургического инструмента. По меньшей мере в одной форме концевой эффектор содержит удлиненный канал, который выполнен с возможностью съемной поддержки в себе кассеты. Пусковой элемент функционально поддерживается относительно удлиненного канала для перемещения между исходным и конечным положением. Приводной стержень инструмента находится в функциональном зацеплении с пусковым элементом для перемещения пускового элемента между исходным и конечным положениями при сообщении ему пусковых движений приводной конфигурацией. Приводной стержень инструмента выполнен с возможностью перемещения из нефункционального положения, в котором приводной стержень инструмента не находится в функциональном зацеплении с приводной конфигурацией, в функциональное положение, в котором приводной стержень инструмента находится в функциональном зацеплении с приводной конфигурацией. Концевой эффектор дополнительно содержит выравнивающий элемент, поддерживаемый с возможностью перемещения для контакта с приводным стержнем инструмента и перемещения приводного стержня инструмента из нефункционального положения в функциональное положение при установке кассеты в удлиненный канал.
Другой пример осуществления включает хирургический инструмент, содержащий удлиненный канал и кассету, съемно поддерживаемую в удлиненном канале. Пусковой элемент функционально поддерживается относительно удлиненного канала для перемещения между исходным и конечным положением. Приводной стержень инструмента находится в функциональном зацеплении с пусковым элементом для перемещения пускового элемента между исходным и конечным положениями при сообщении ему пусковых движений приводной конфигурацией. Приводной стержень инструмента выполнен с возможностью перемещения из нефункционального положения, в котором приводной стержень инструмента не находится в функциональном зацеплении с приводной конфигурацией, в функциональное положение, в котором приводной стержень инструмента находится в функциональном зацеплении с приводной конфигурацией. Хирургический инструмент дополнительно содержит выравнивающий элемент, поддерживаемый с возможностью перемещения для контакта с приводным стержнем инструмента и перемещения приводного стержня инструмента из нефункционального положения в функциональное положение при установке кассеты в удлиненный канал.
Устройства, описанные в настоящем документе, могут быть выполнены с возможностью утилизации после однократного применения, или они могут быть выполнены с возможностью применения множество раз. Однако в любом случае после по меньшей мере одного применения устройство можно применять повторно после восстановления. Восстановление может включать любую комбинацию стадий разборки устройства, после которого выполняется очистка или замена конкретных частей с последующей повторной сборкой. В частности, можно разобрать устройство и избирательно заменить или удалить в любой комбинации любой ряд конкретных частей или частей устройства. После очистки и/или замены конкретных частей устройство можно повторно собрать для последующего применения в центрах по восстановлению или хирургической командой непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что при восстановлении устройства можно использовать различные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное в результате подготовленное к повторному применению устройство входят в объем настоящей заявки.
Хотя настоящее изобретение описано в настоящем документе применительно к определенным описанным примерам осуществления, к данным примерам осуществления можно применить различные вариации и модификации. Например, можно использовать различные виды концевых эффекторов. Также для определенных компонентов, для которых описаны материалы, можно использовать другие материалы. Представленное выше описание и следующая формула изобретения охватывают все такие модификации и вариации.
Любой патент, публикация или другой материал описания, который полностью или частично включен в настоящий документ путем ссылки, является неотъемлемой частью данного документа в той степени, в которой он не противоречит существующим определениям, утверждениям или другим материалам описания, представленным в настоящем описании. Таким образом, описание, в прямой форме представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей материалу, включенному в настоящий документ путем ссылки. Любой материал или его часть, которая включена в настоящий документ путем ссылки, но которая противоречит существующим определениям, положениям или информации описания, представленной в настоящем документе, включена в данный документ только в той мере, в которой между существующим материалом описания и настоящим документом не возникает противоречий.
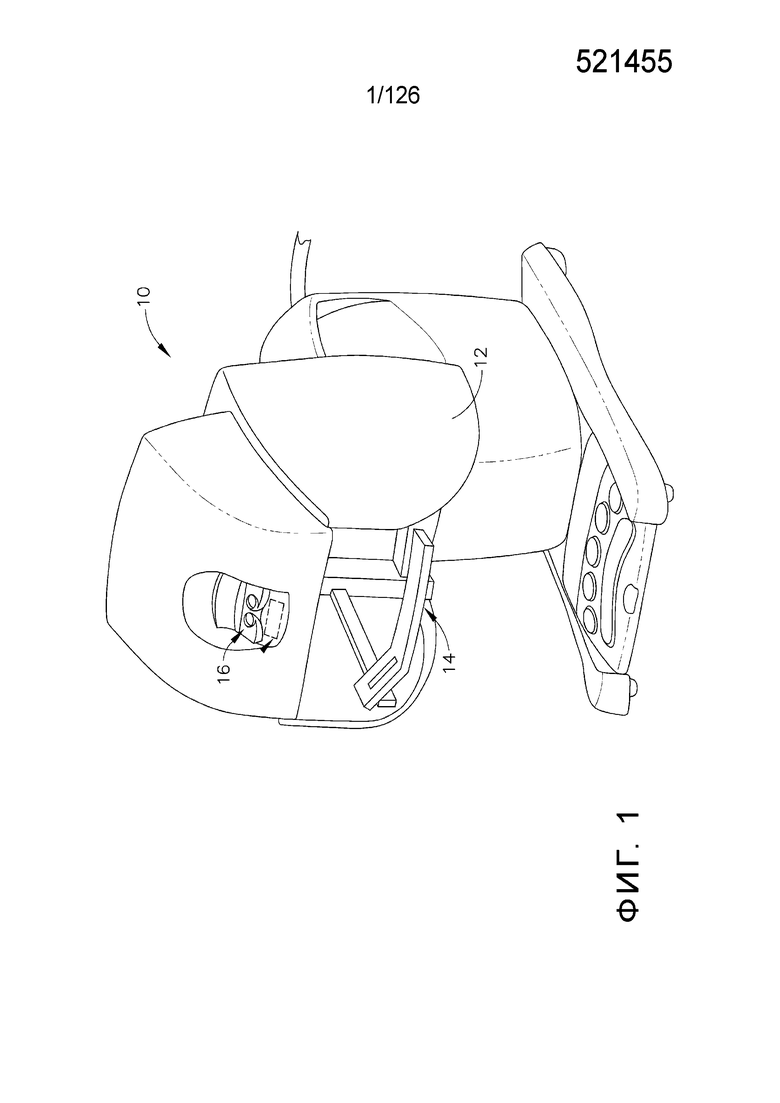
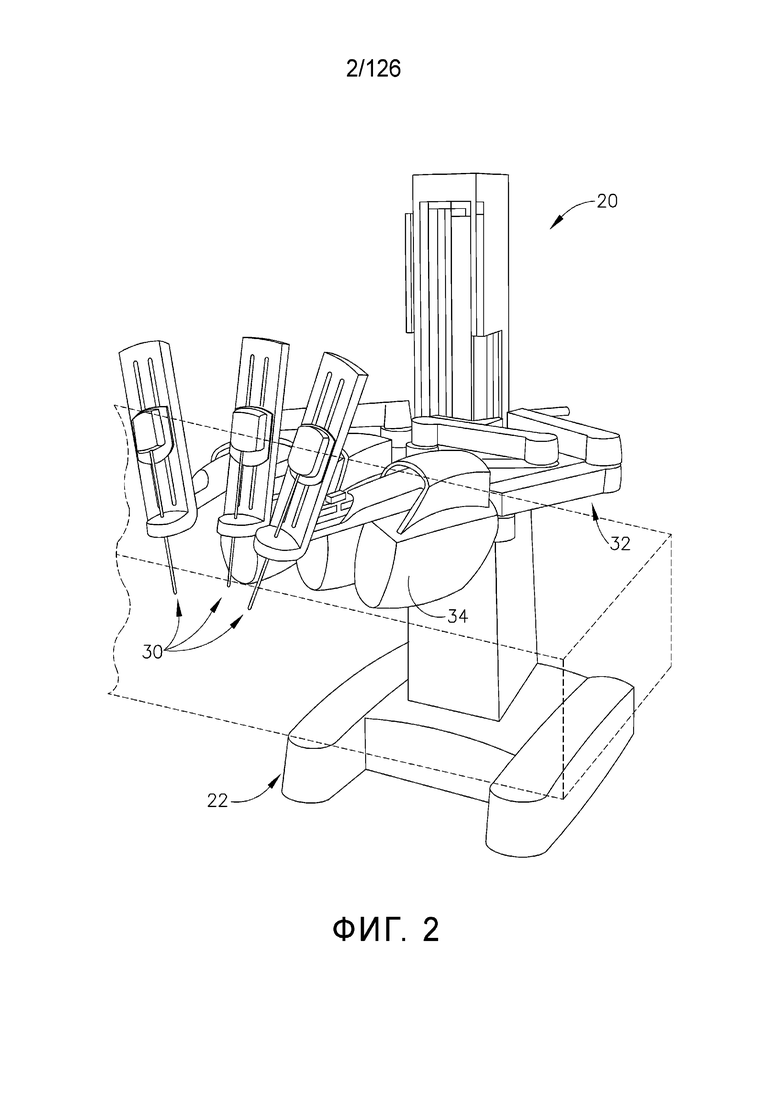
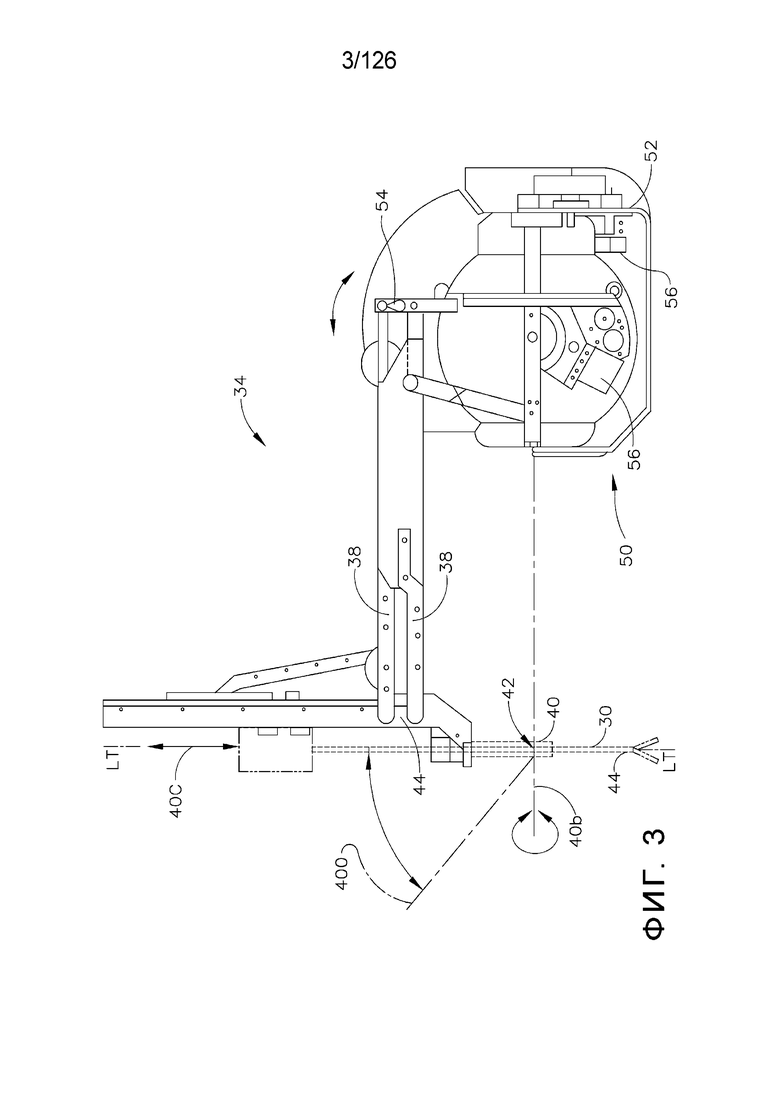
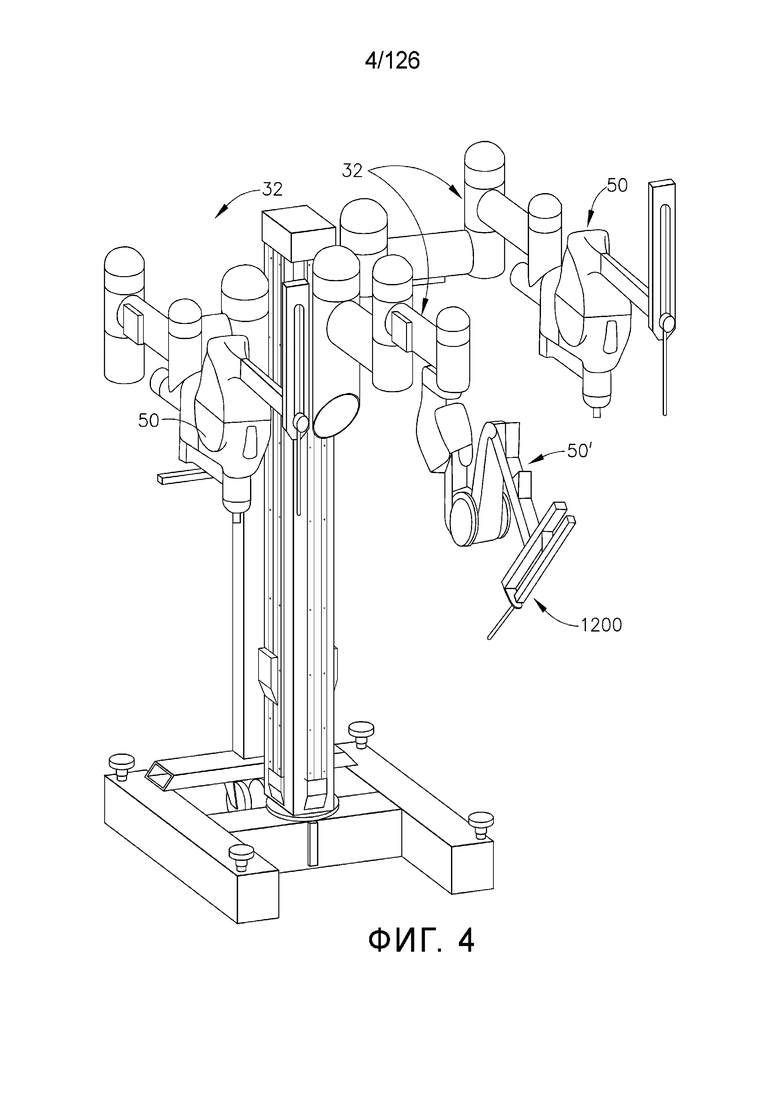
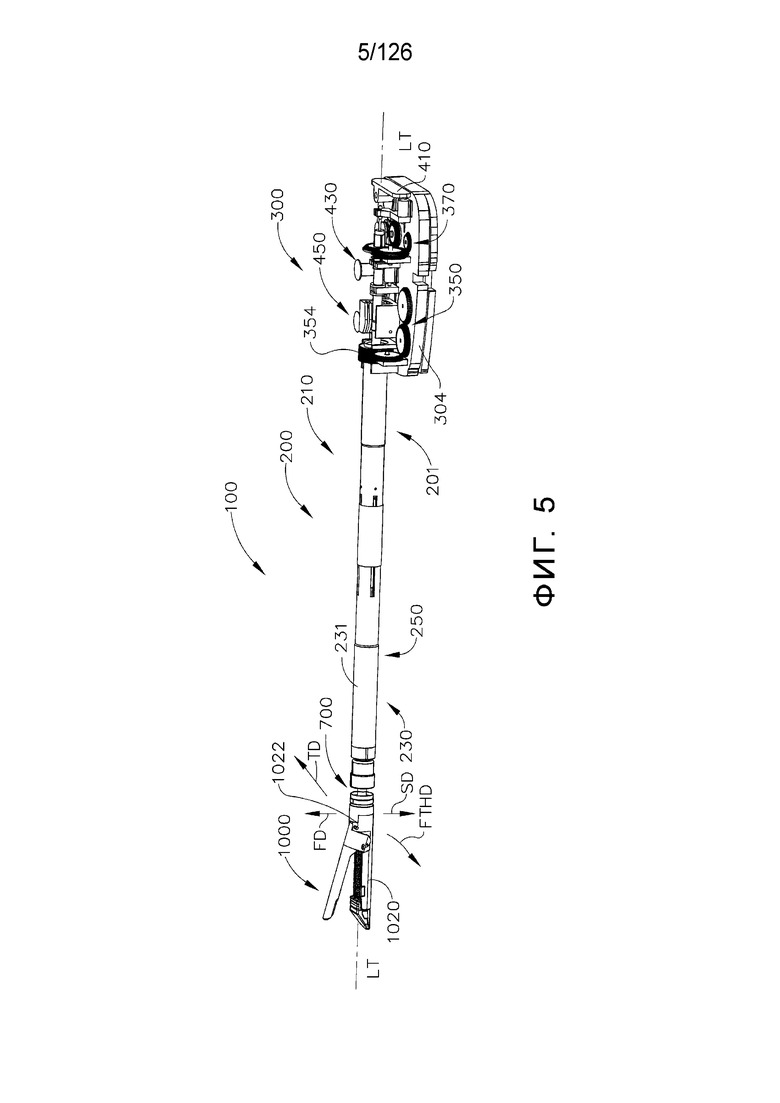
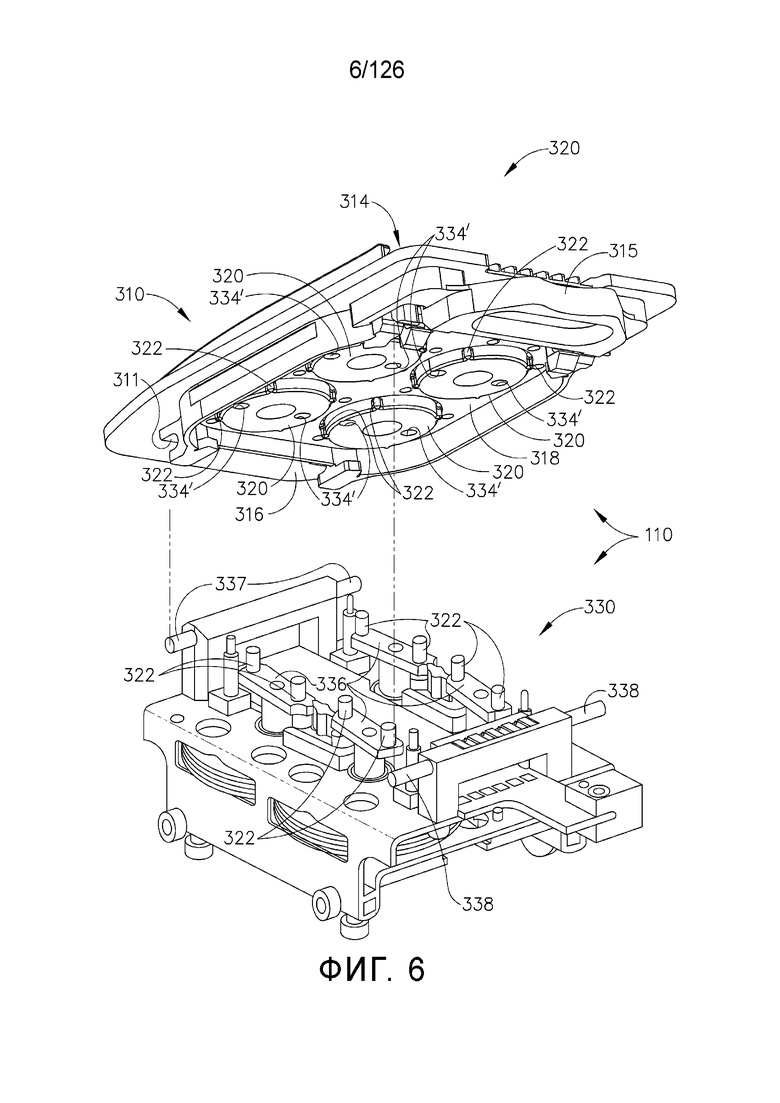
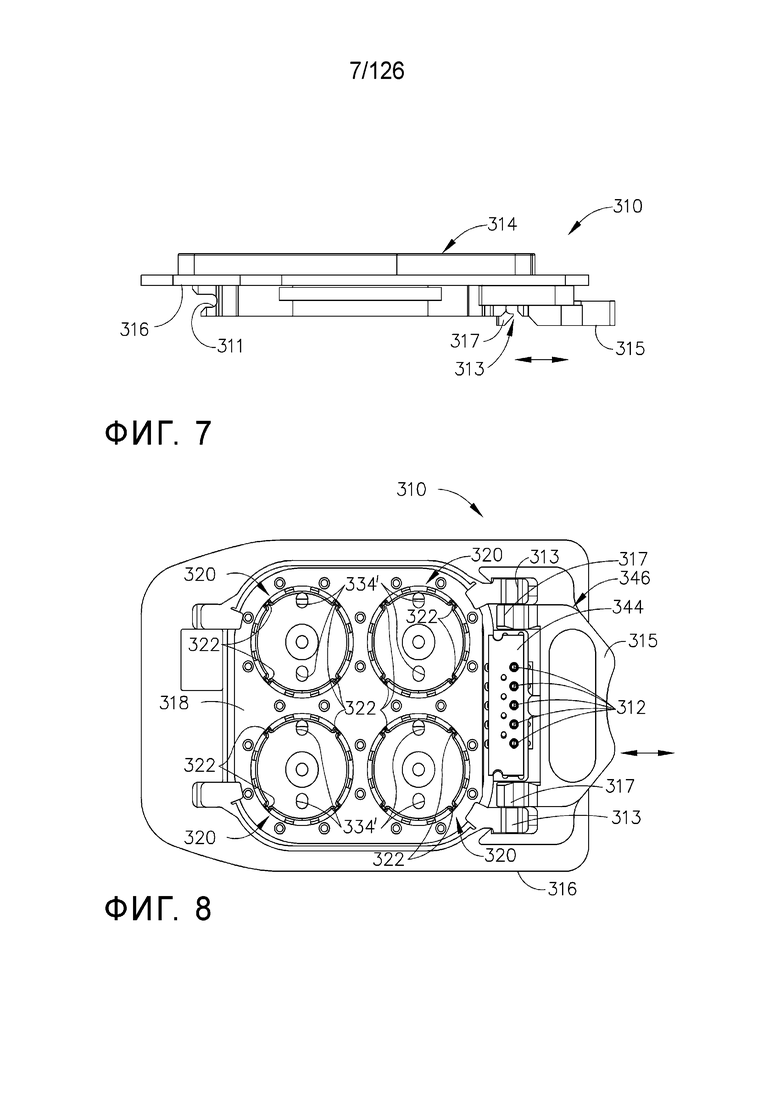
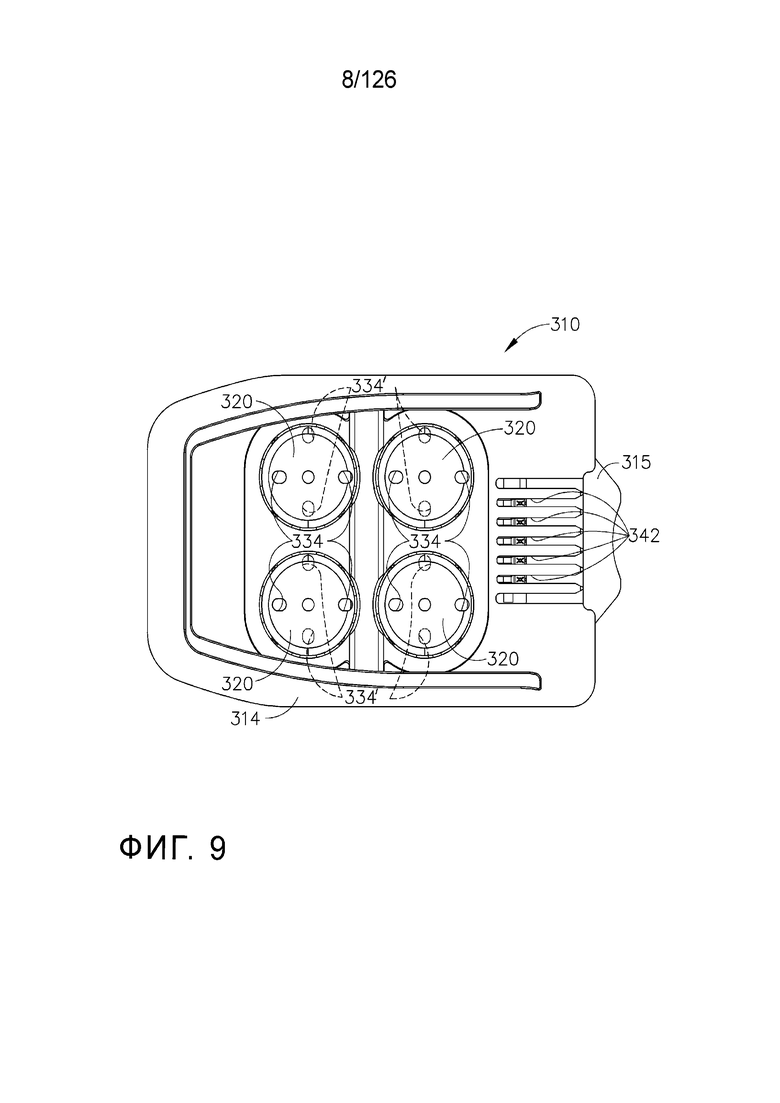
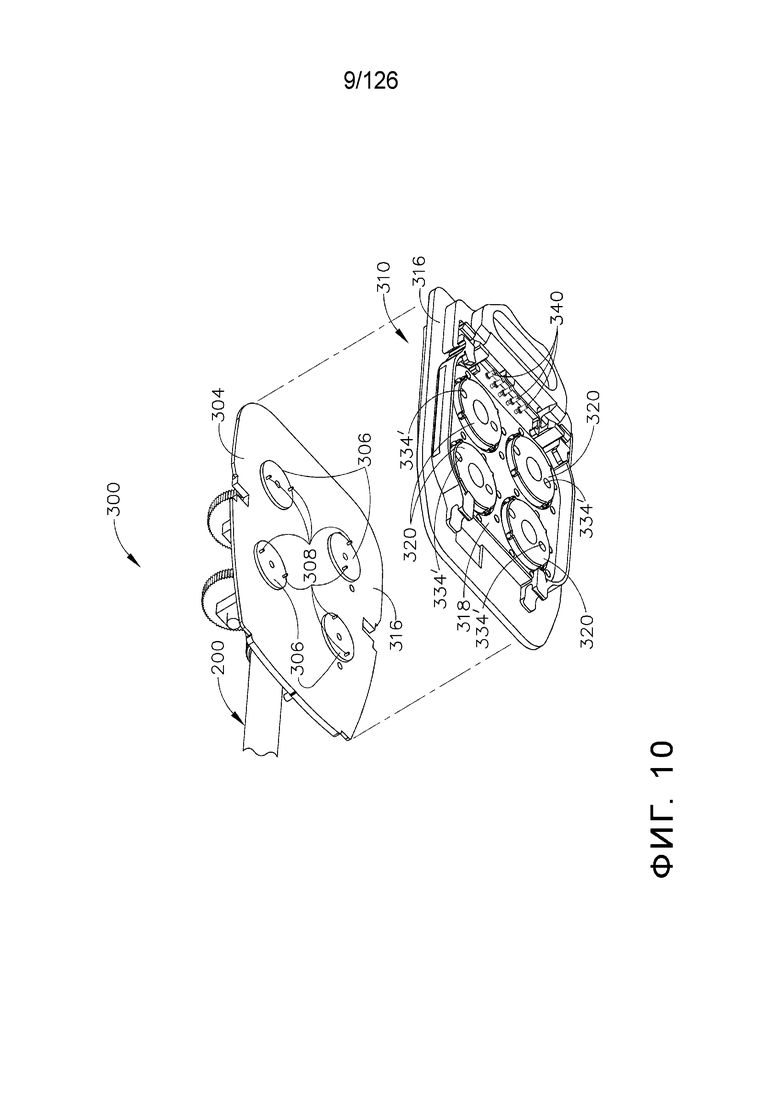
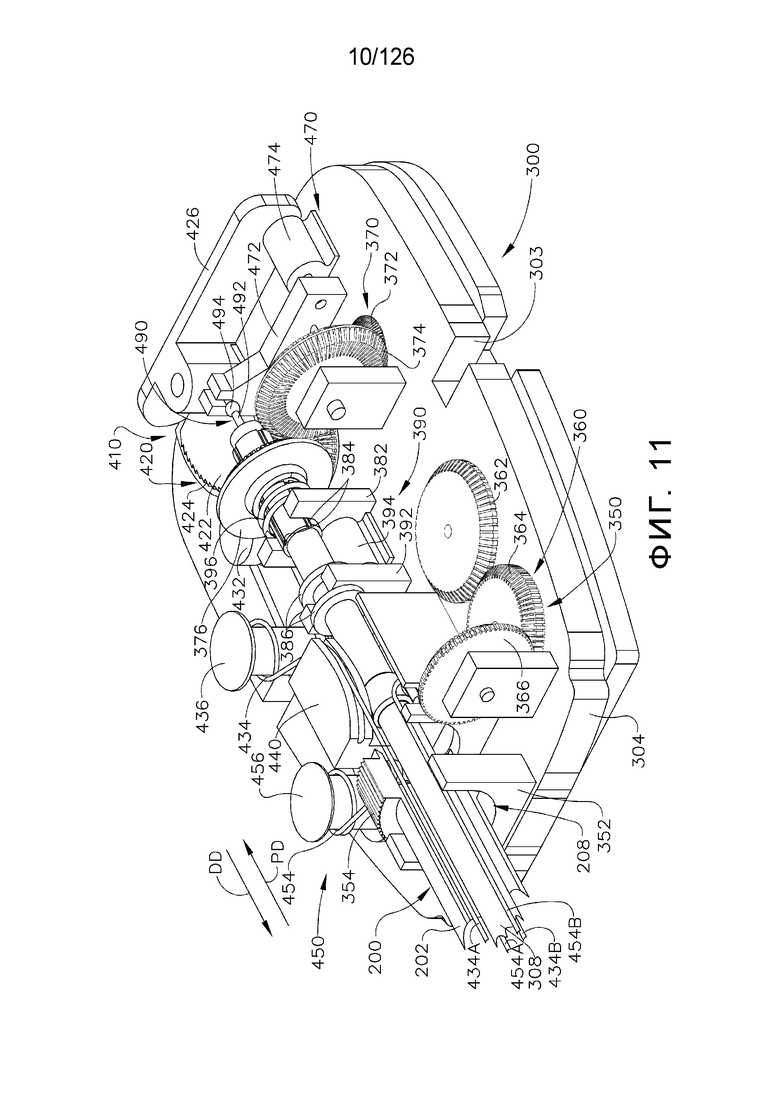
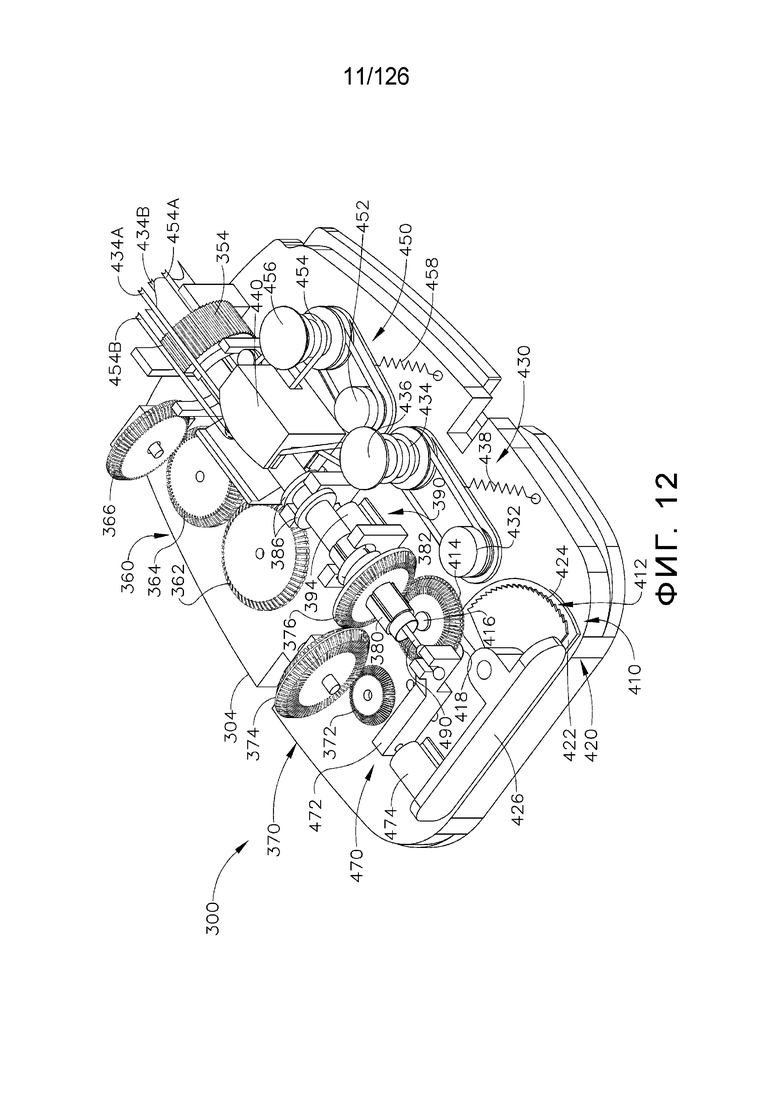
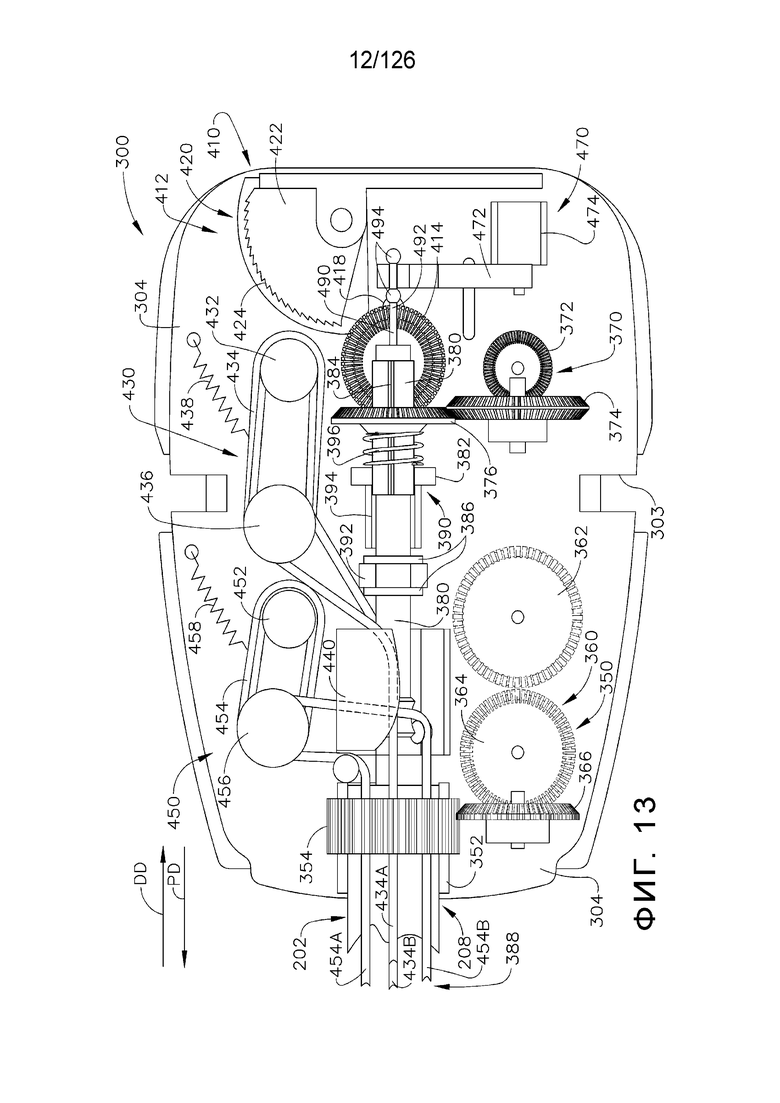
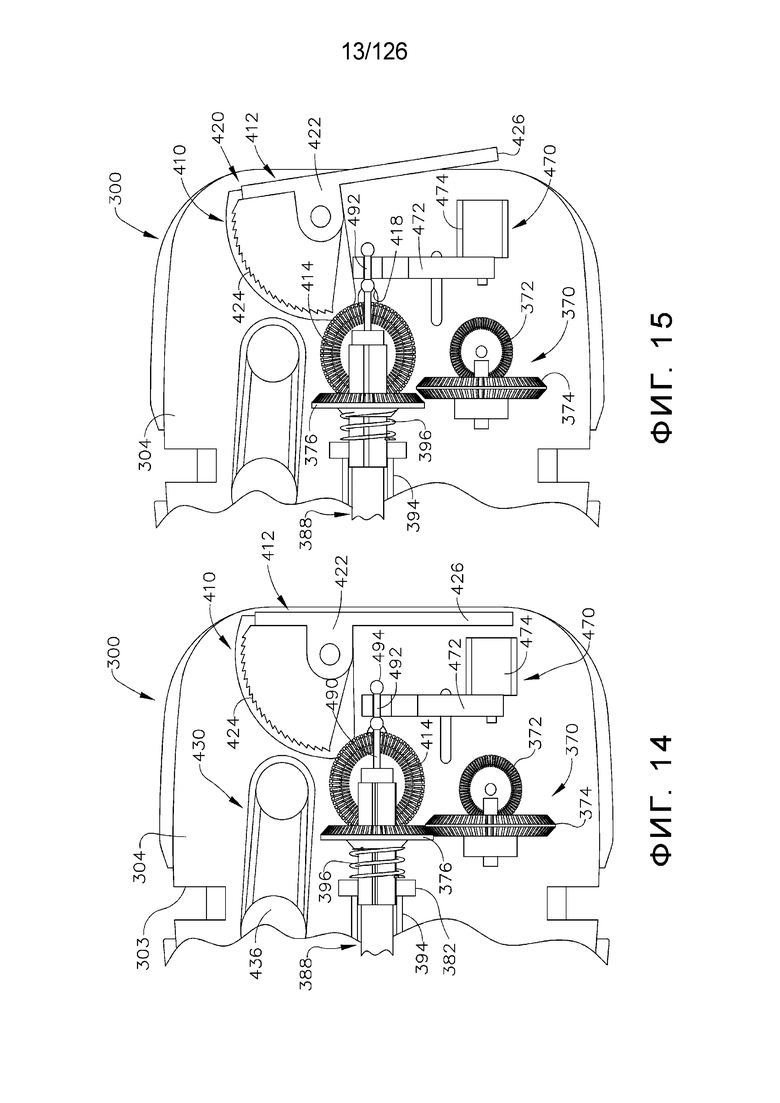
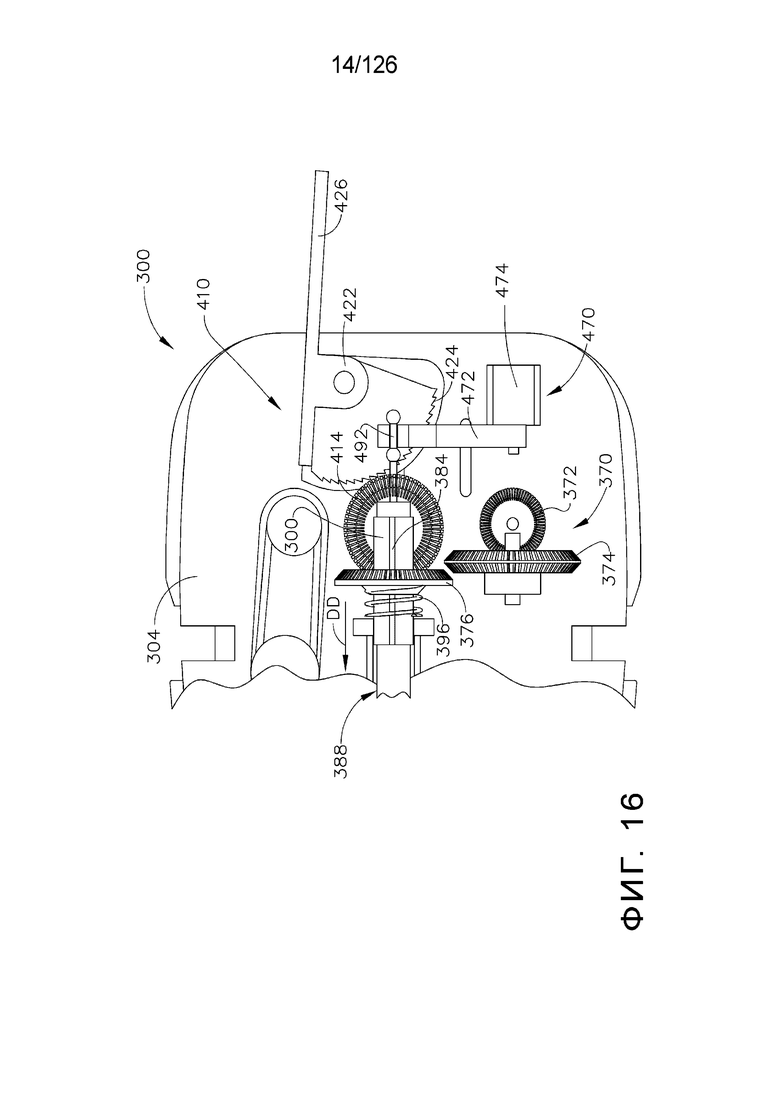
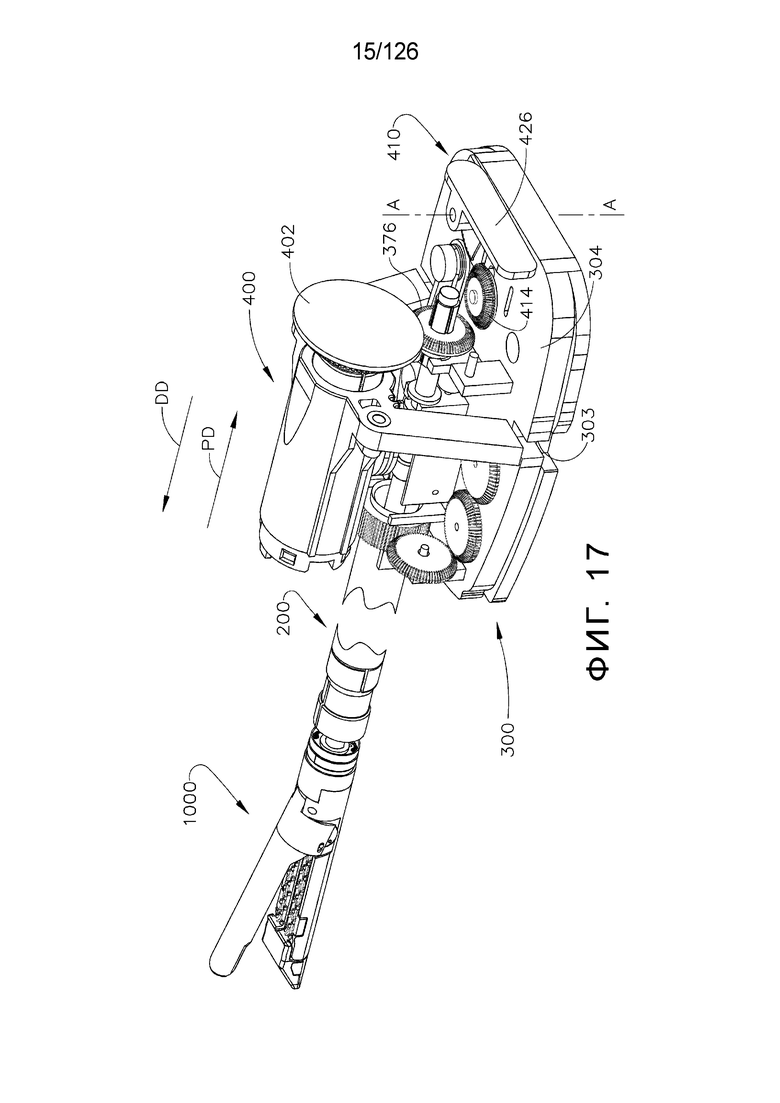
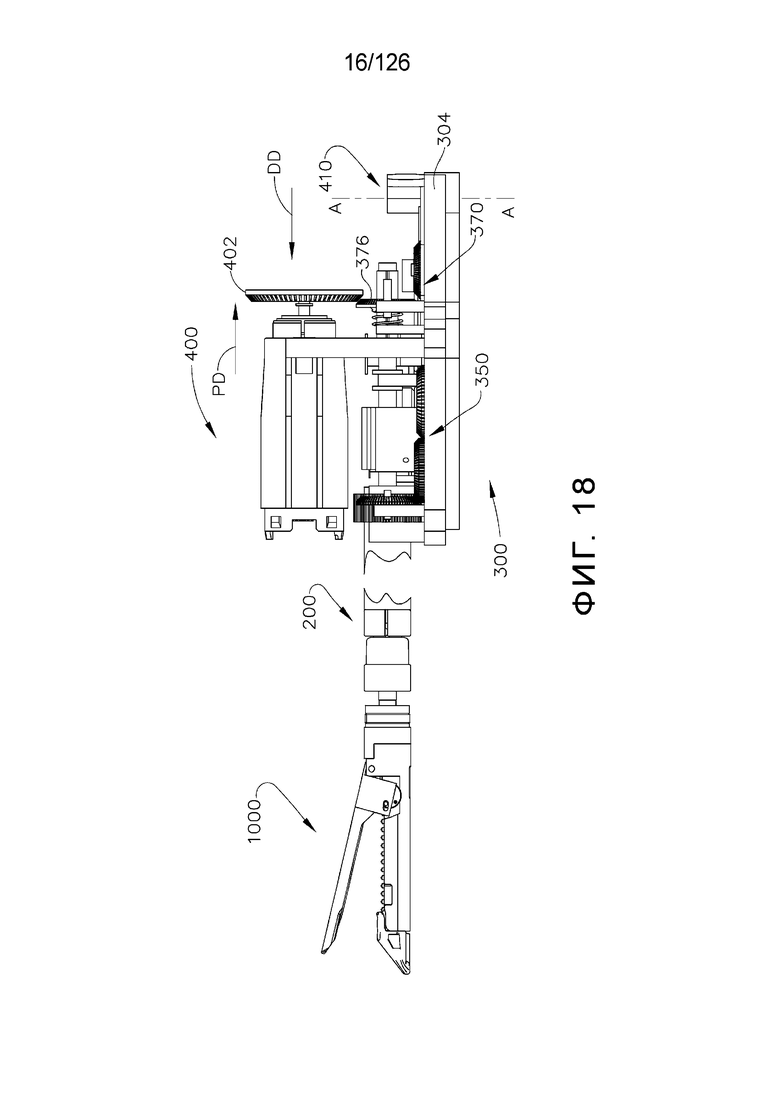
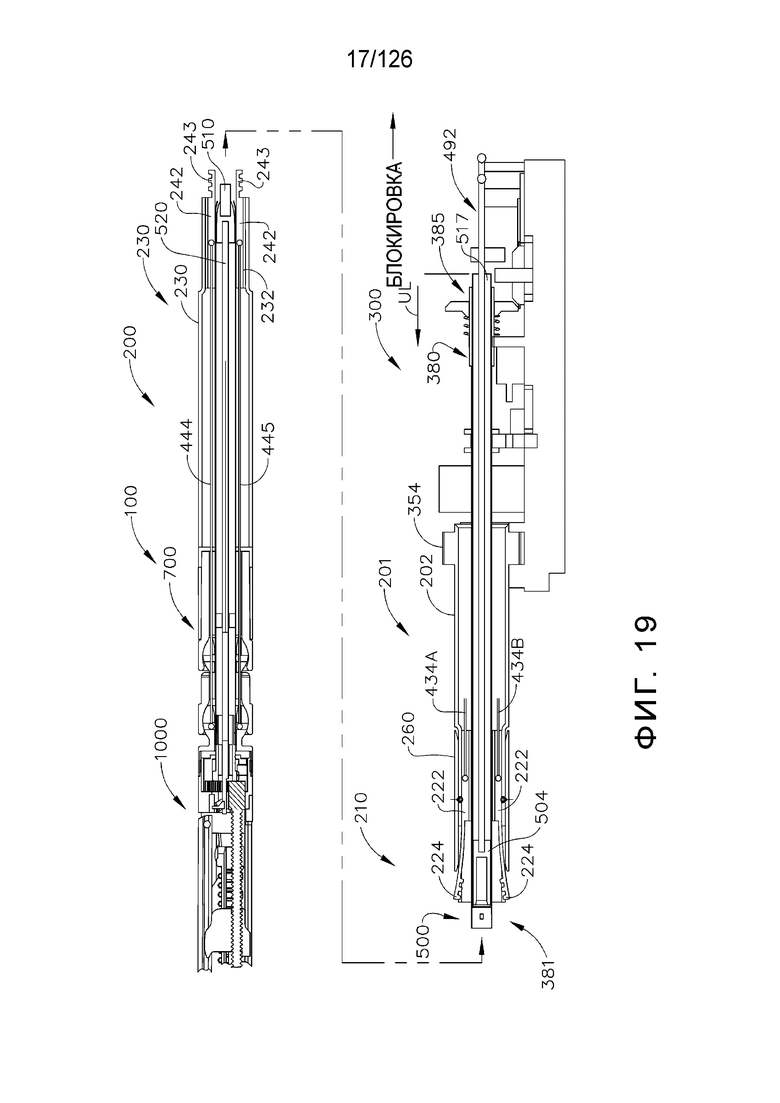
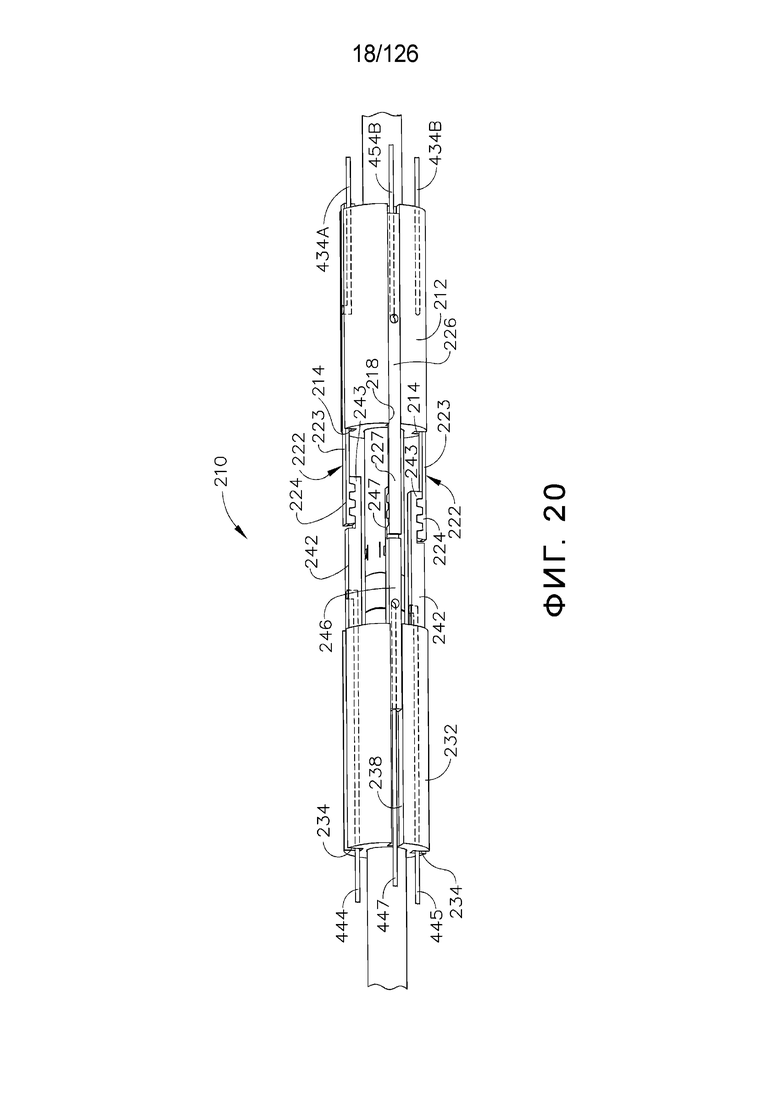
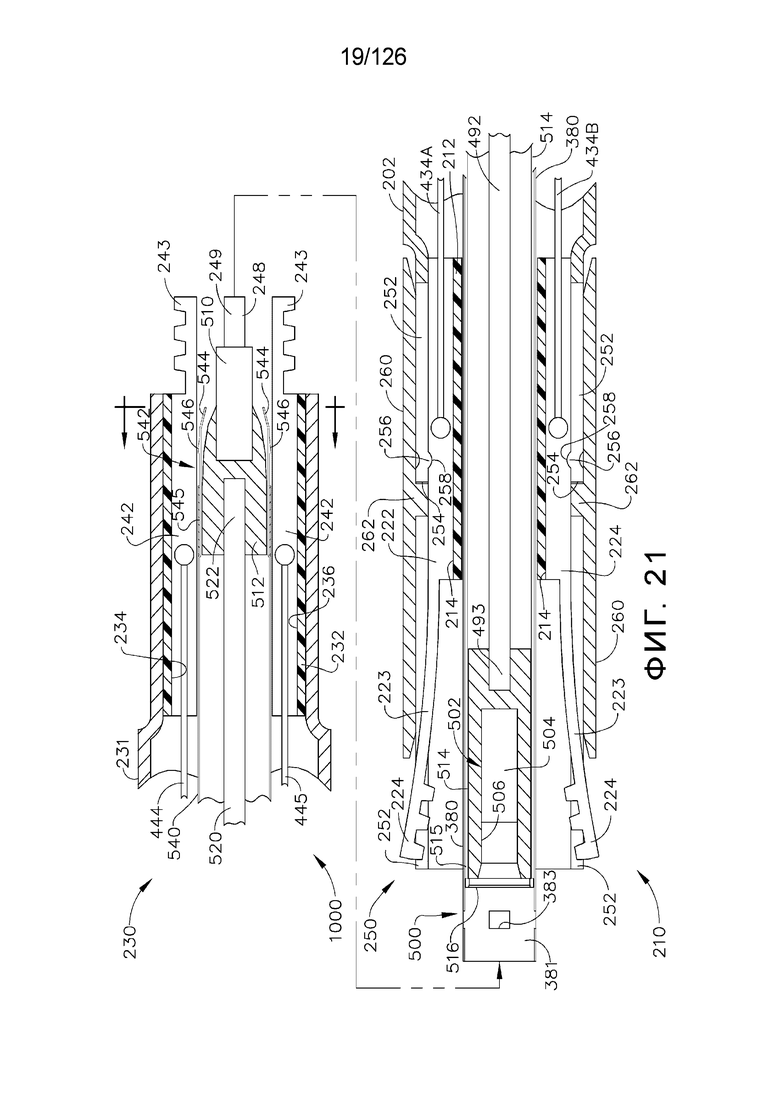
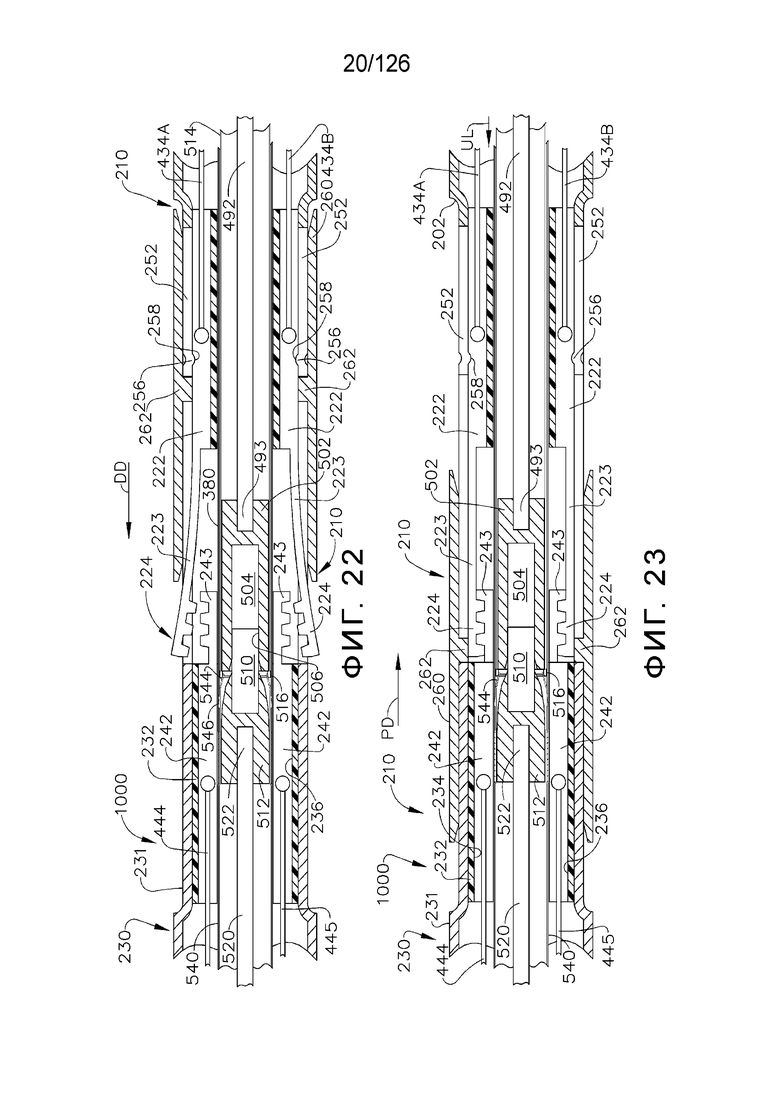
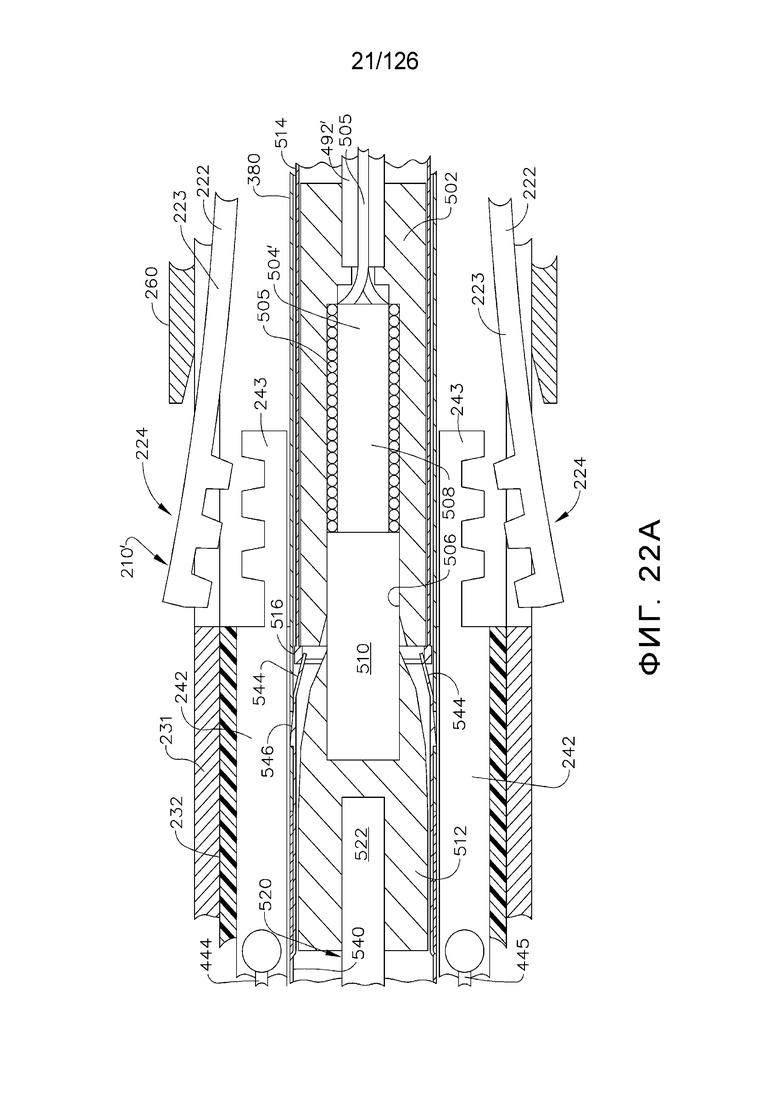
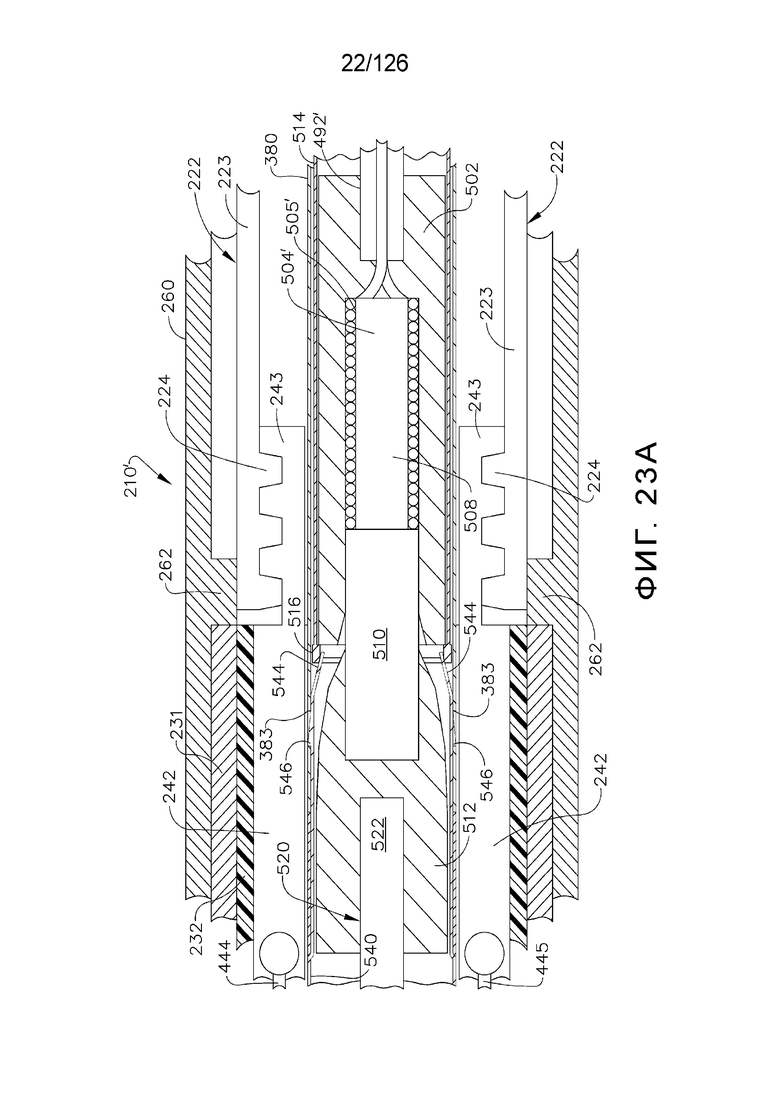
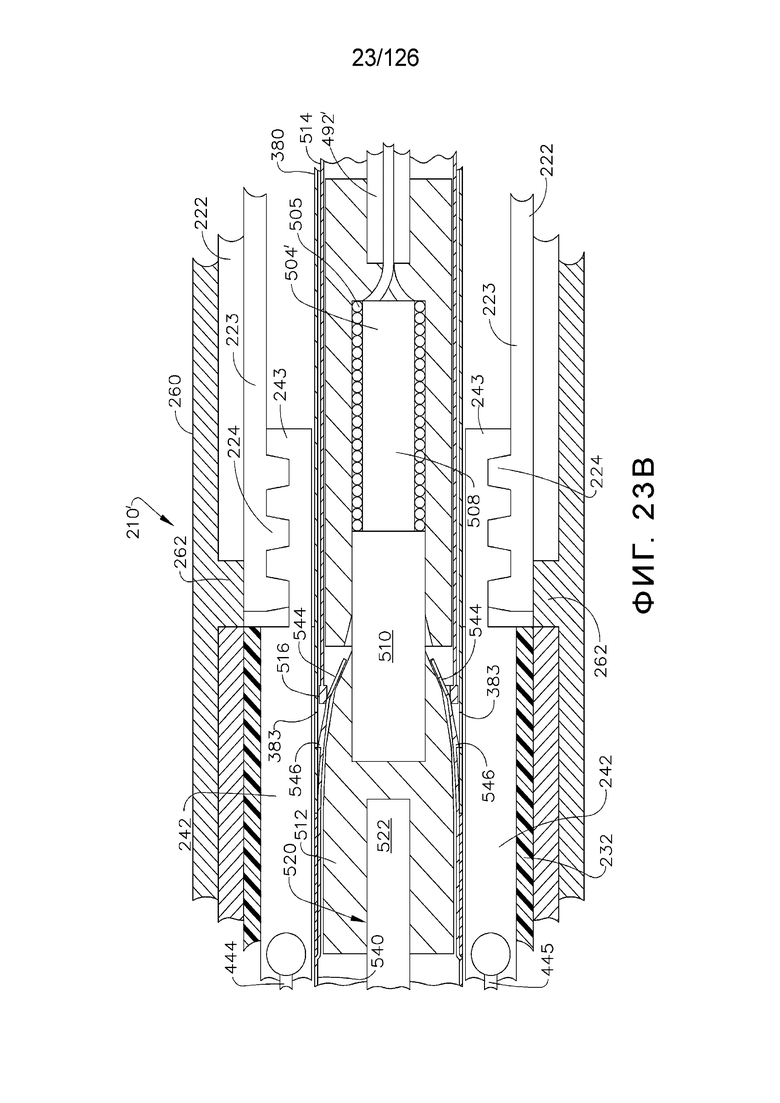
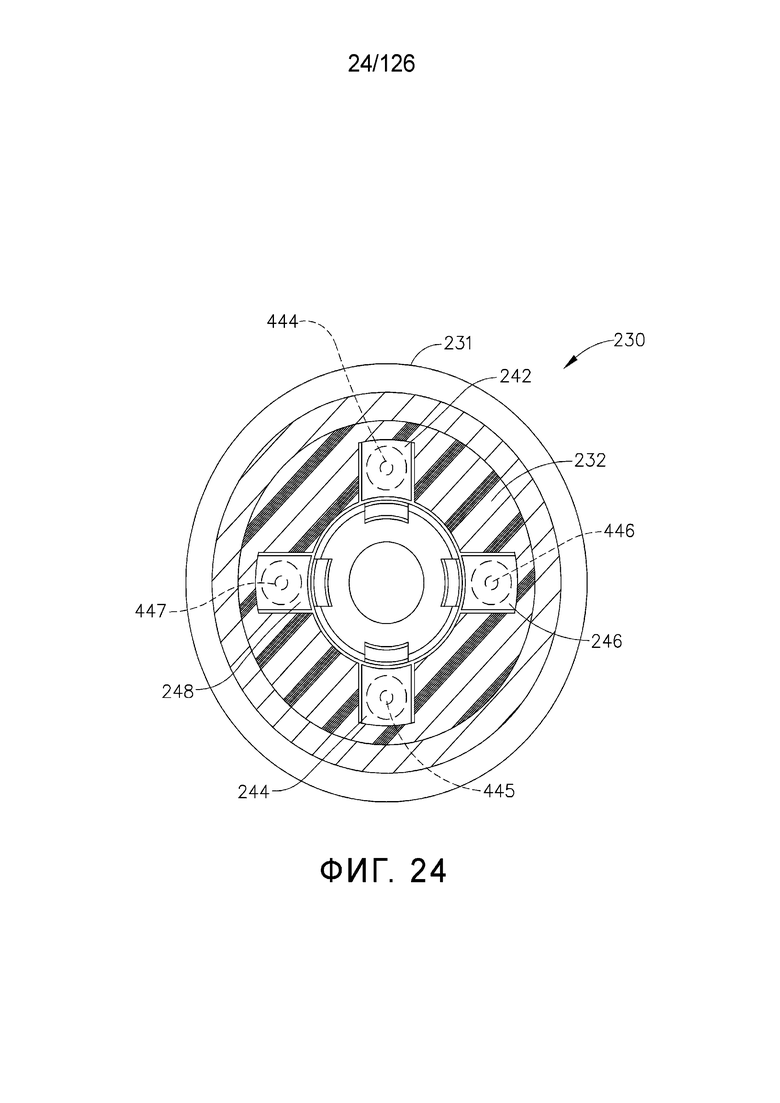
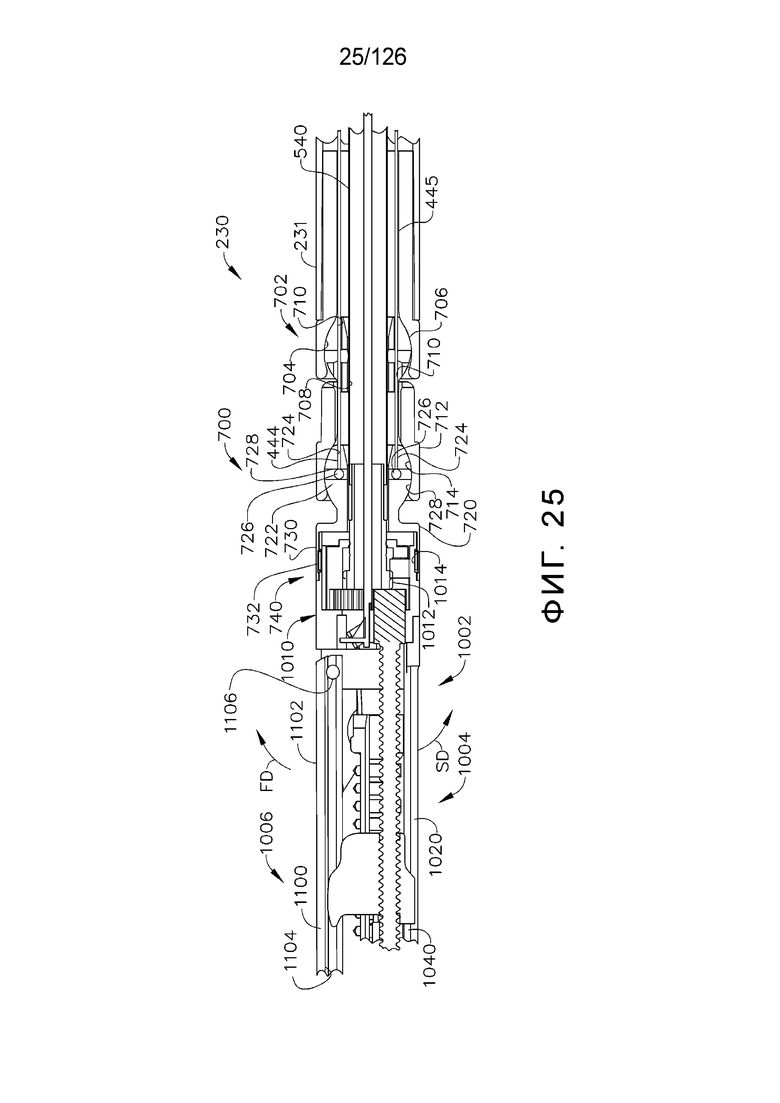

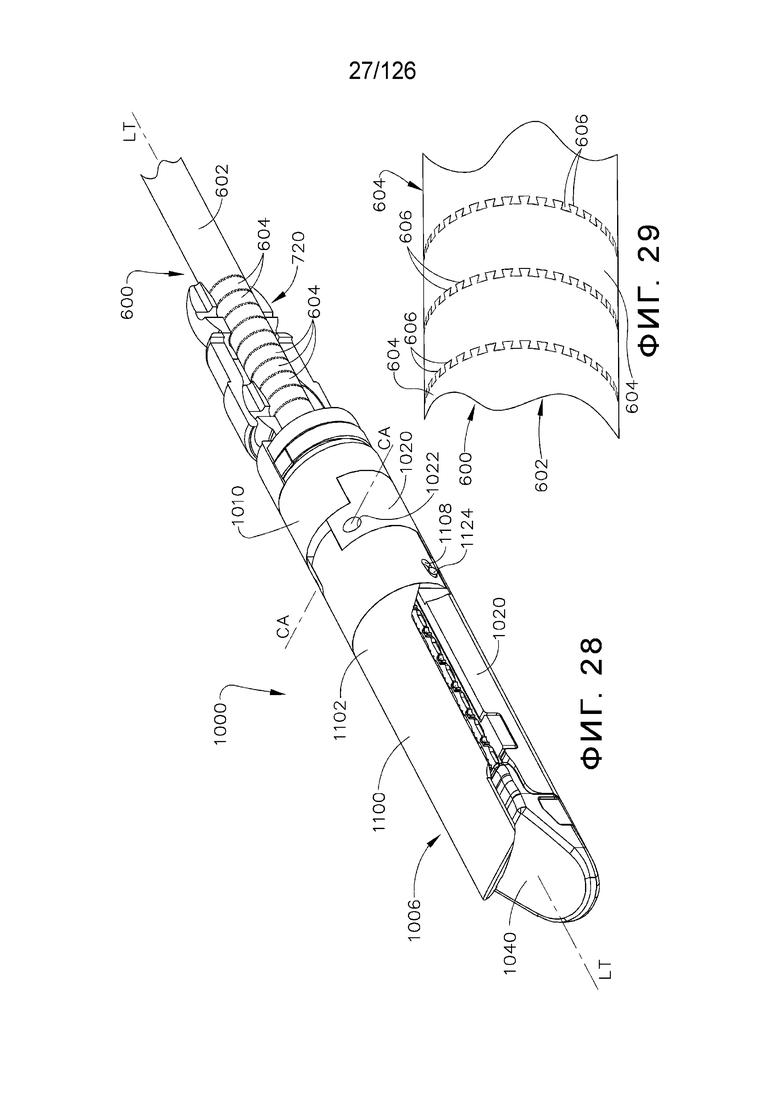
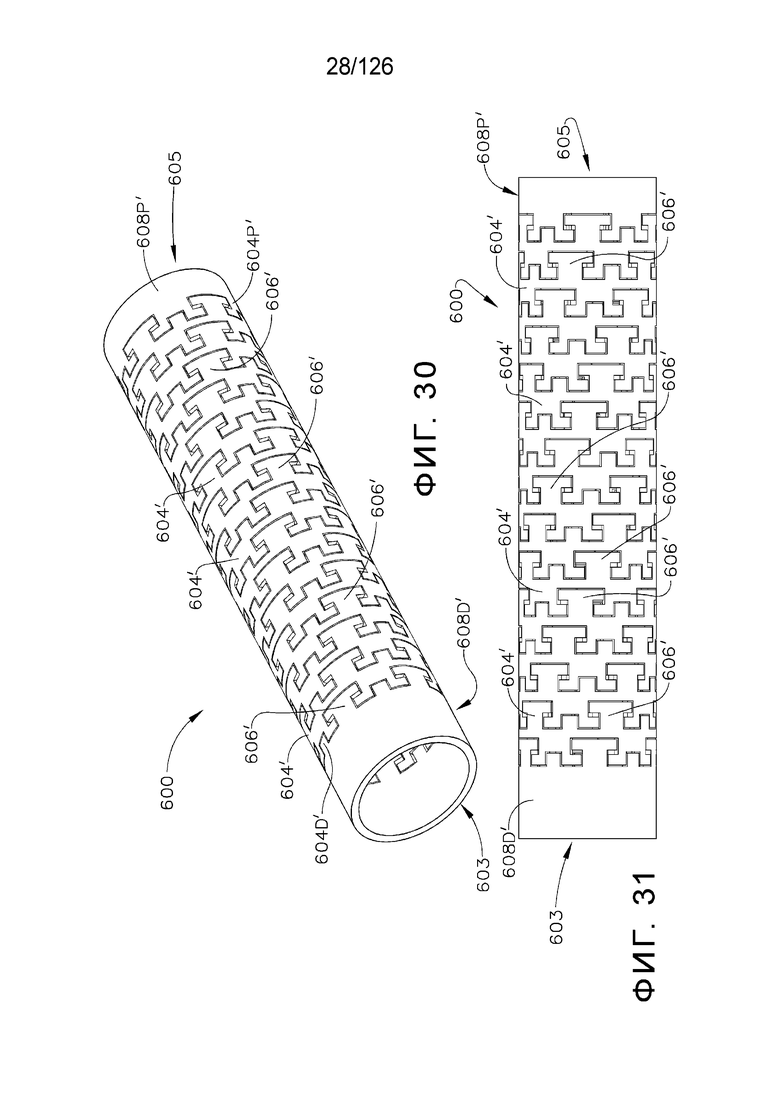
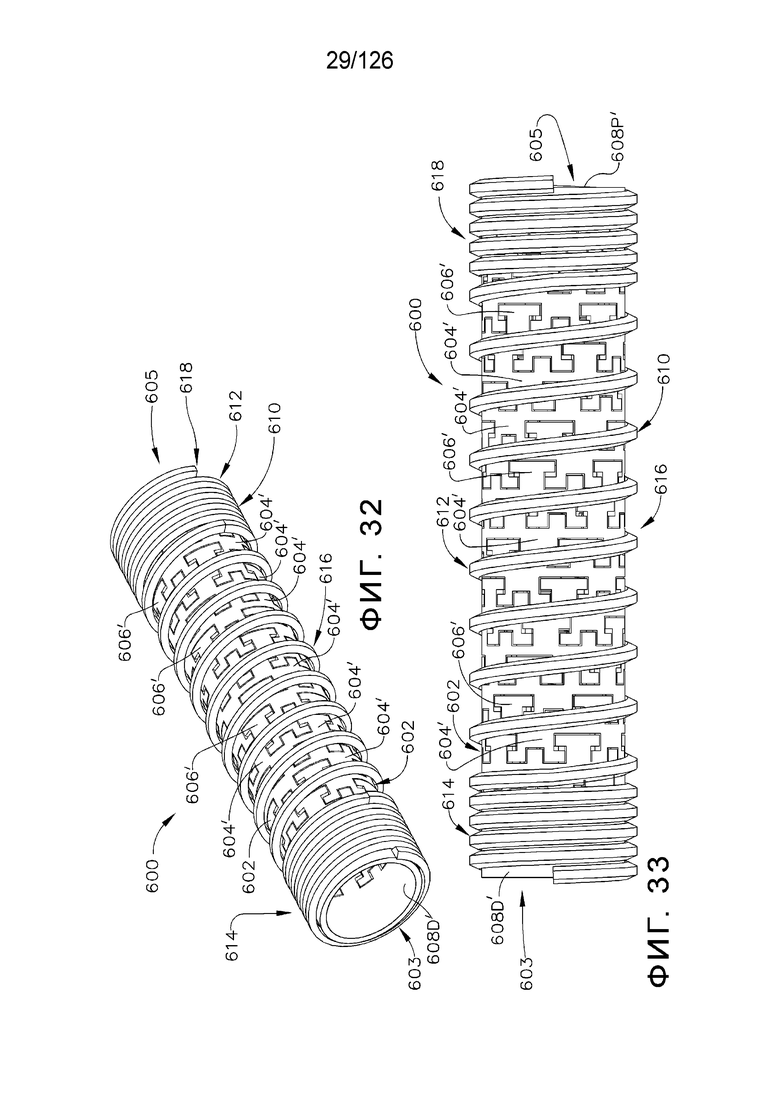

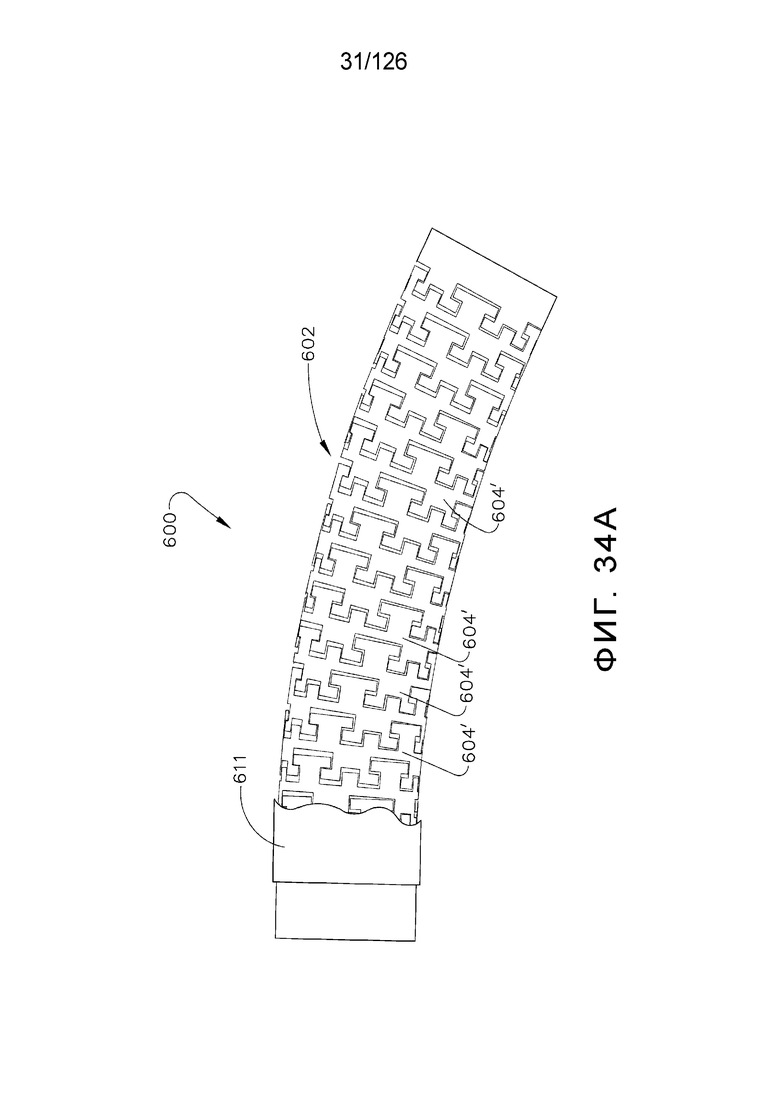
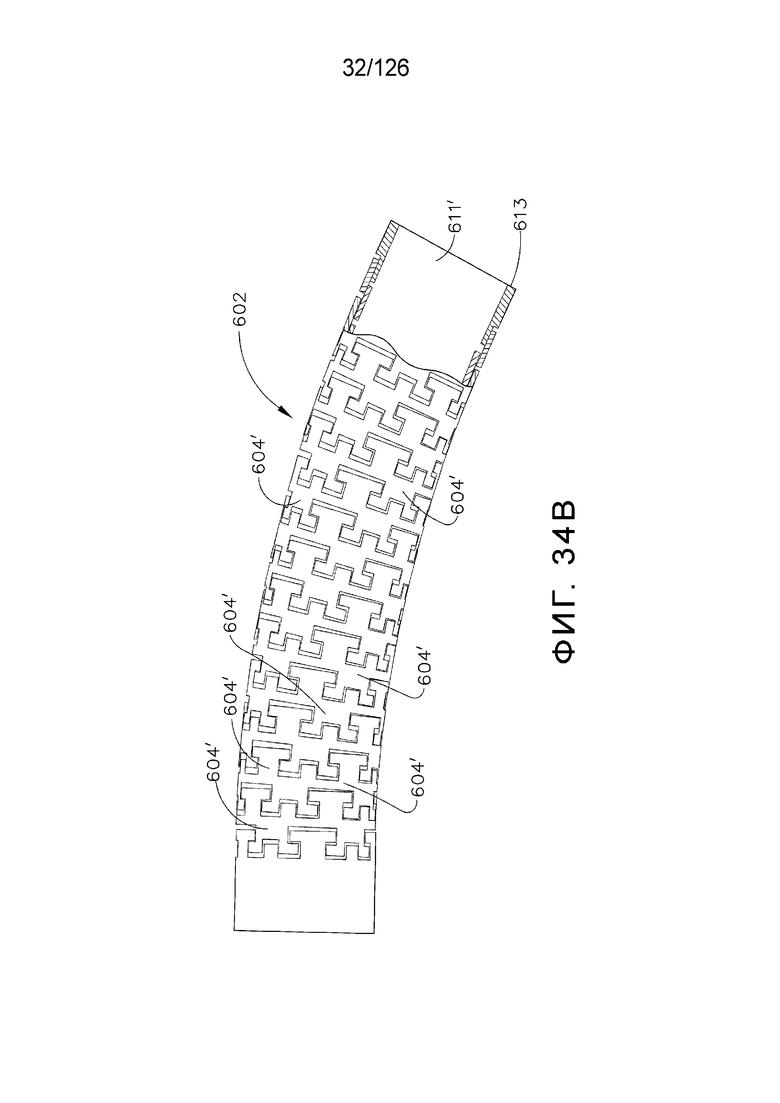

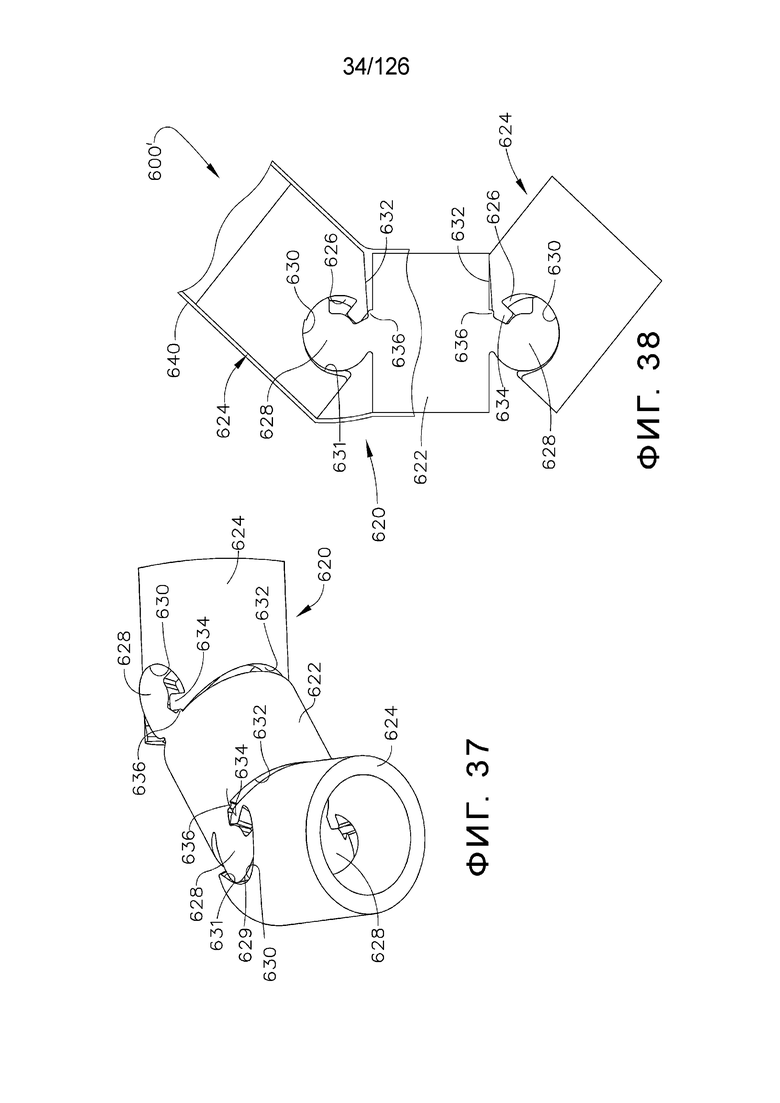
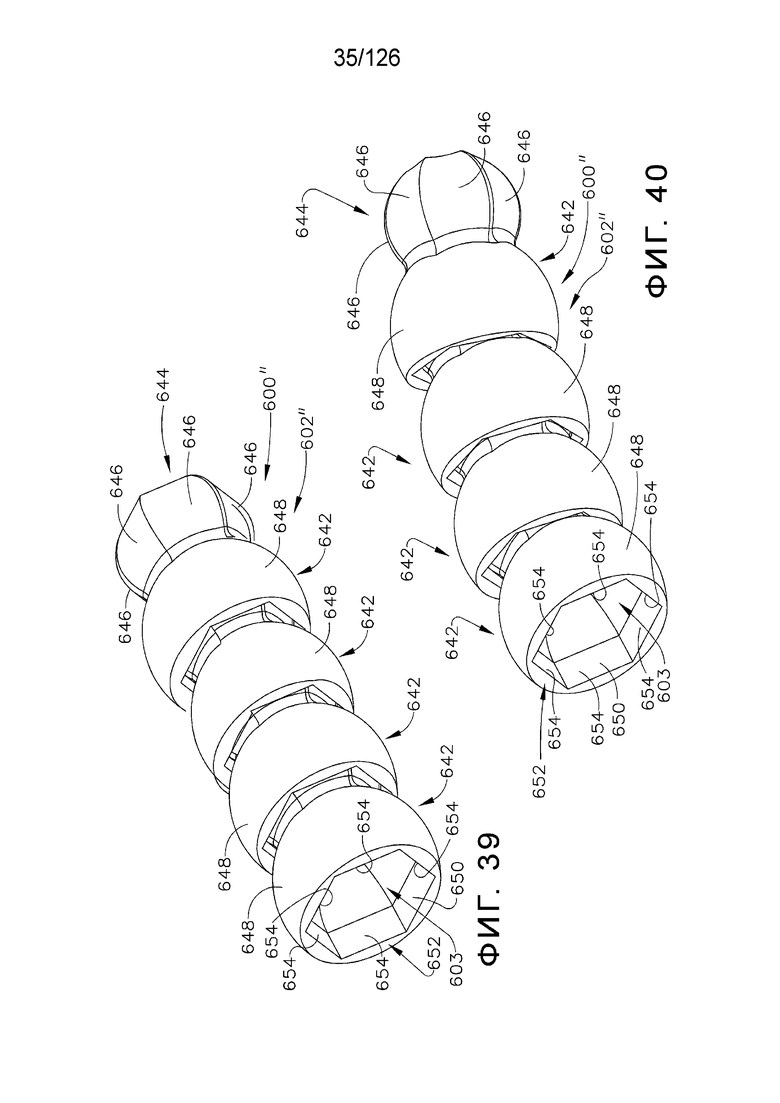
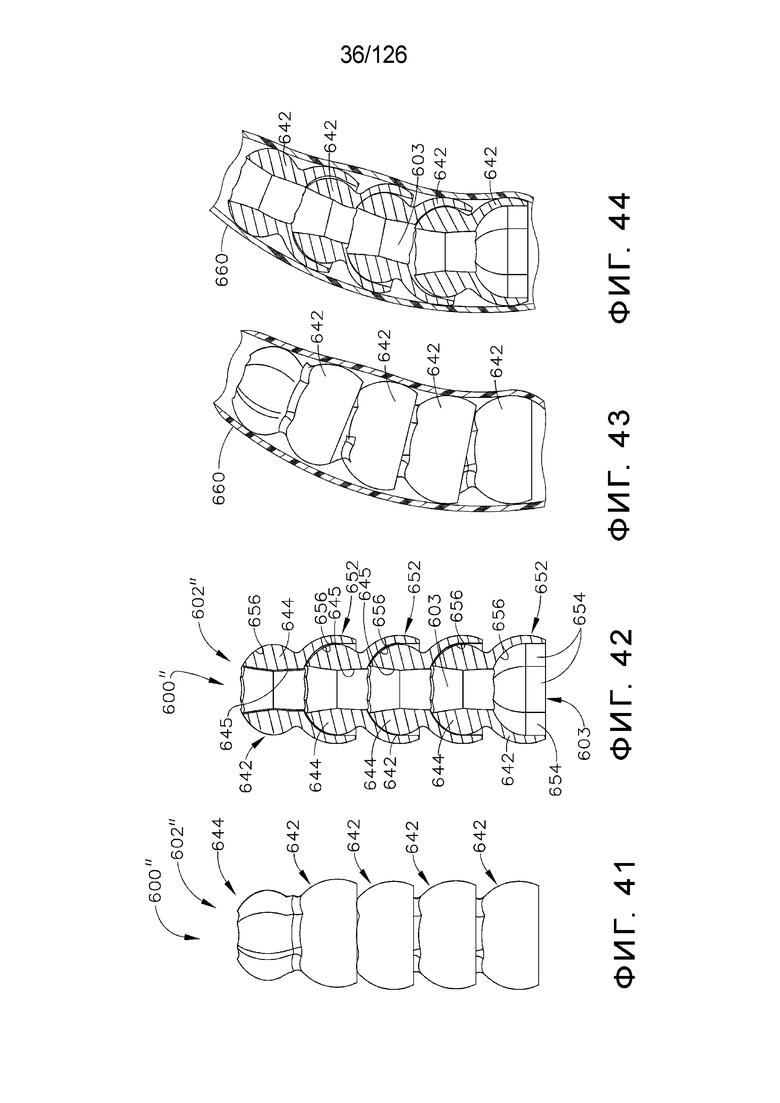
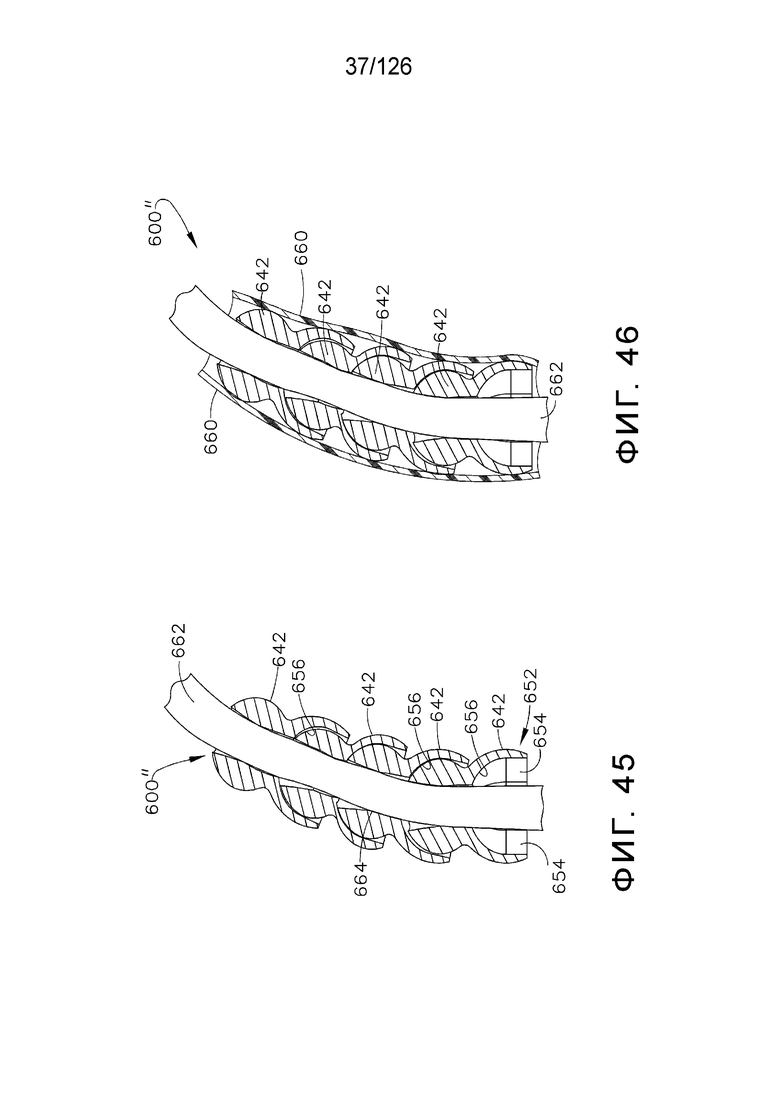
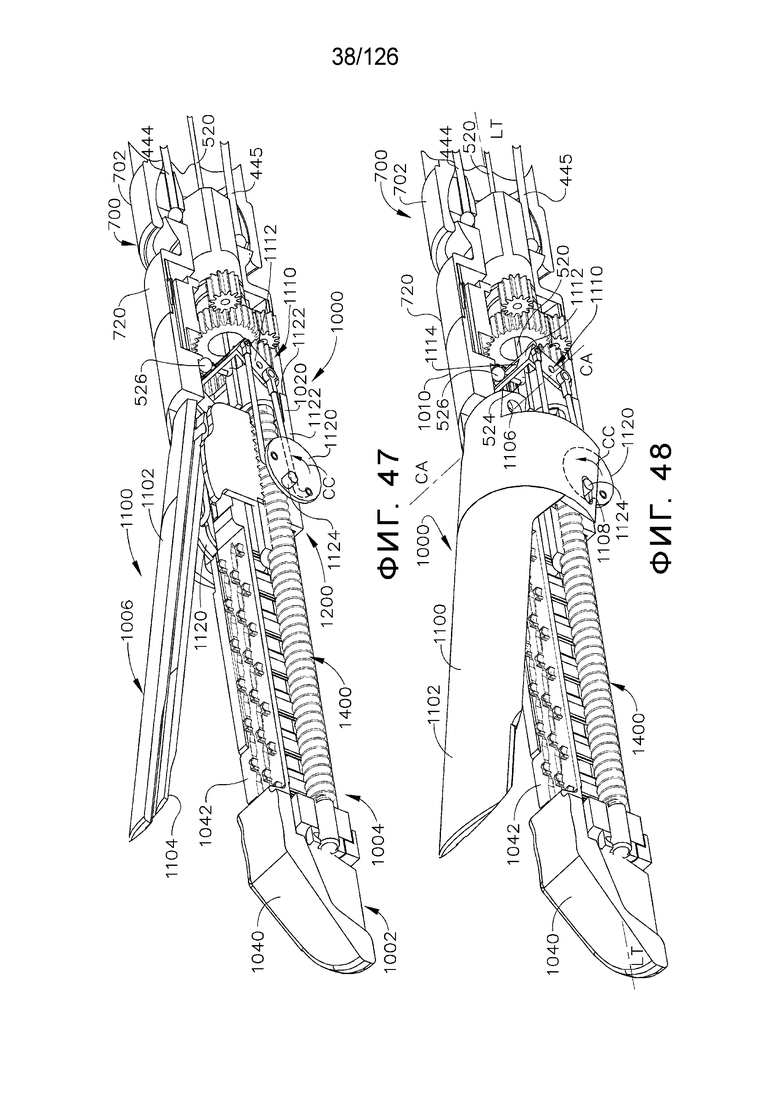
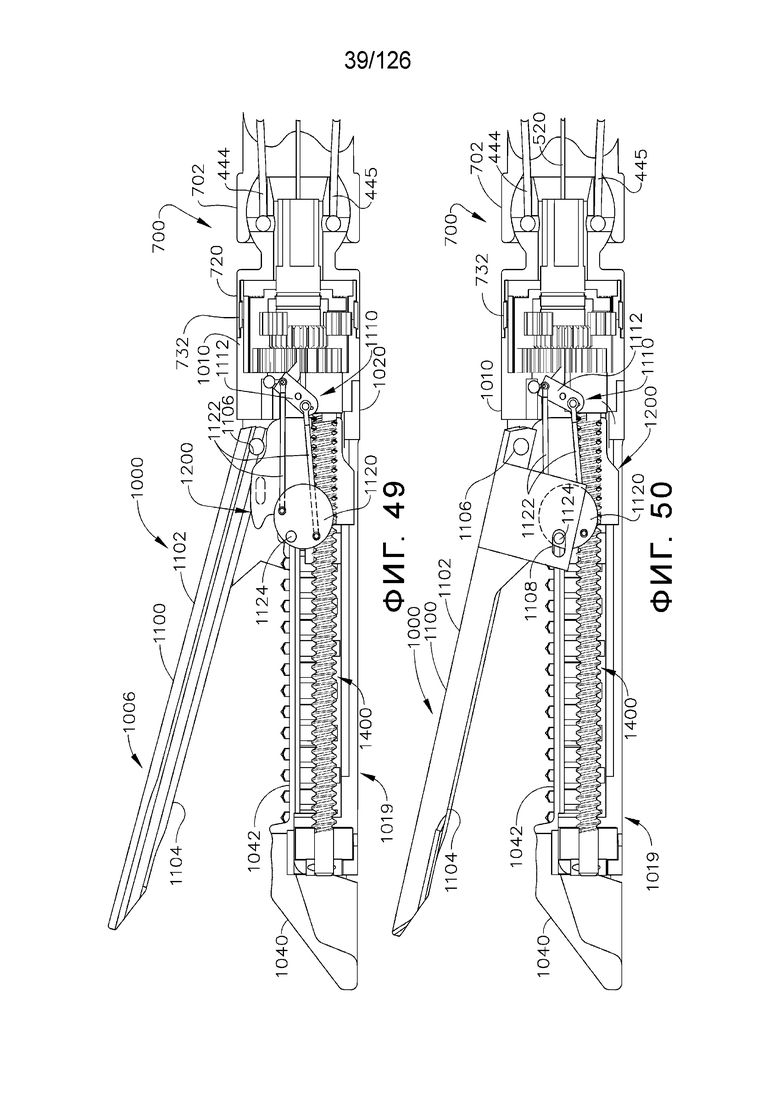
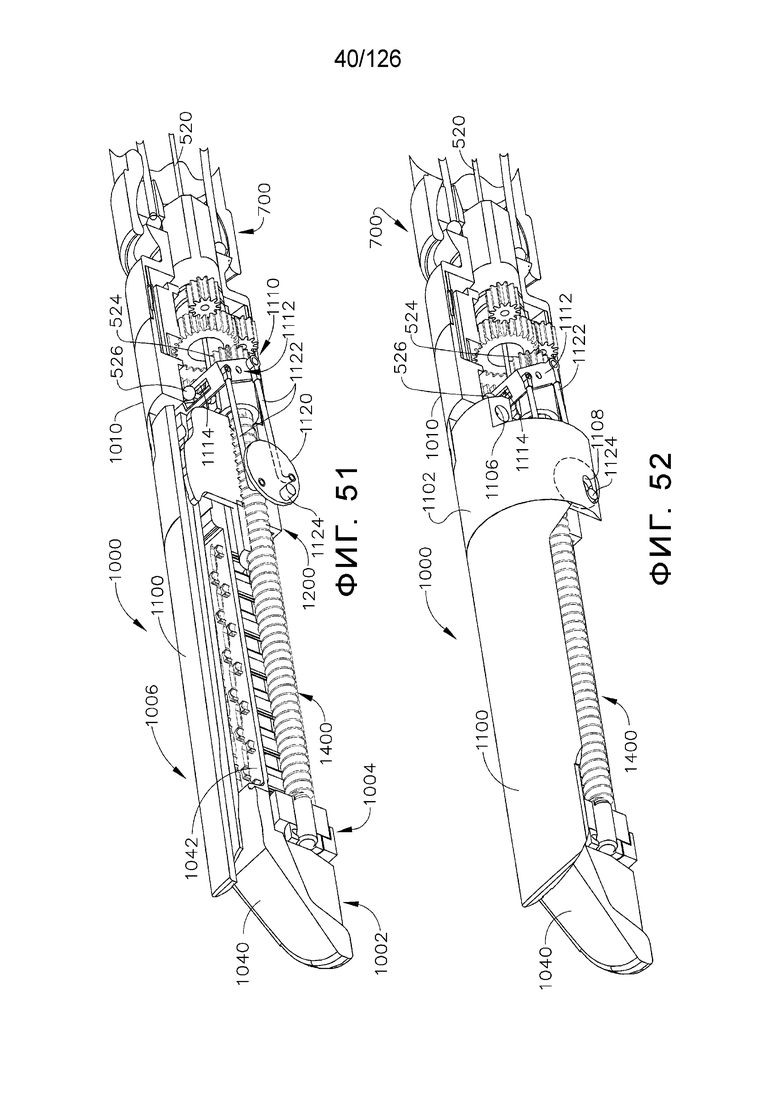
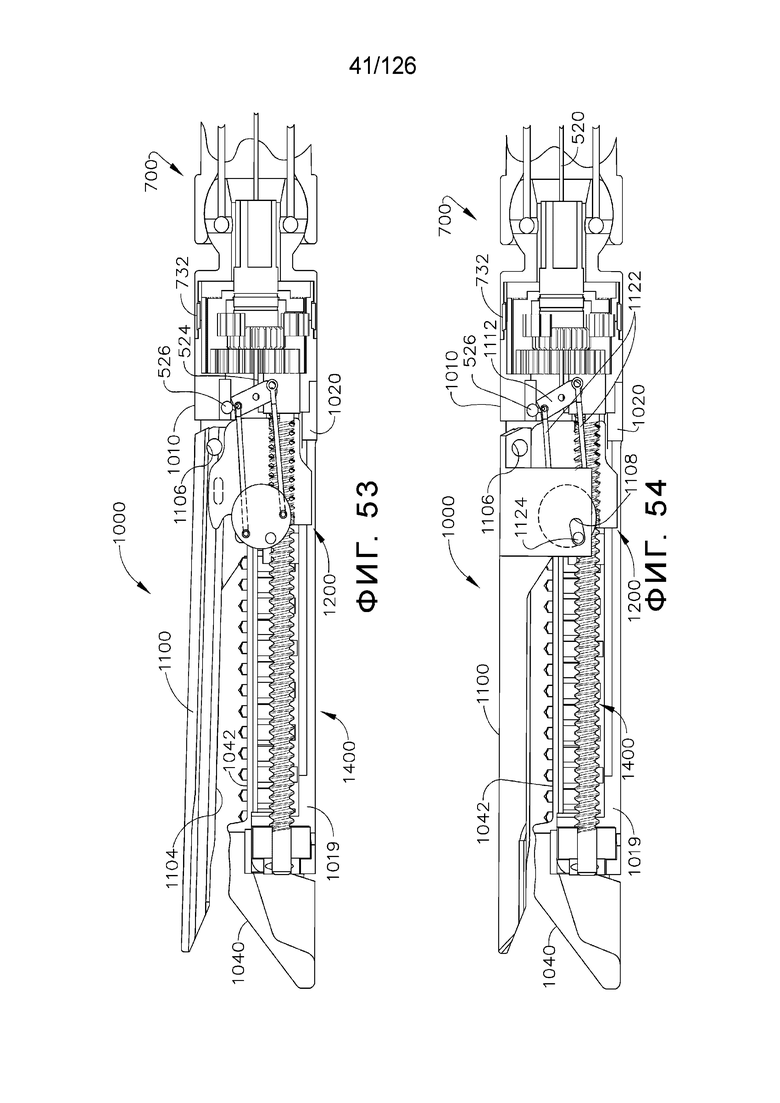
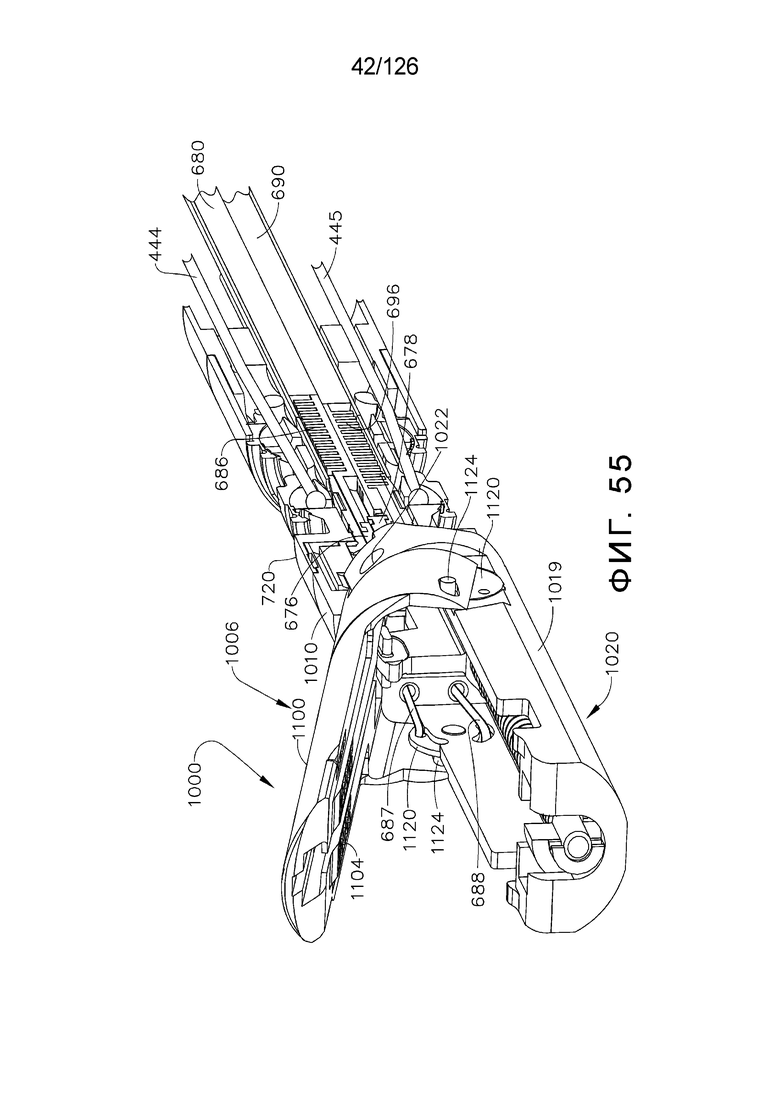
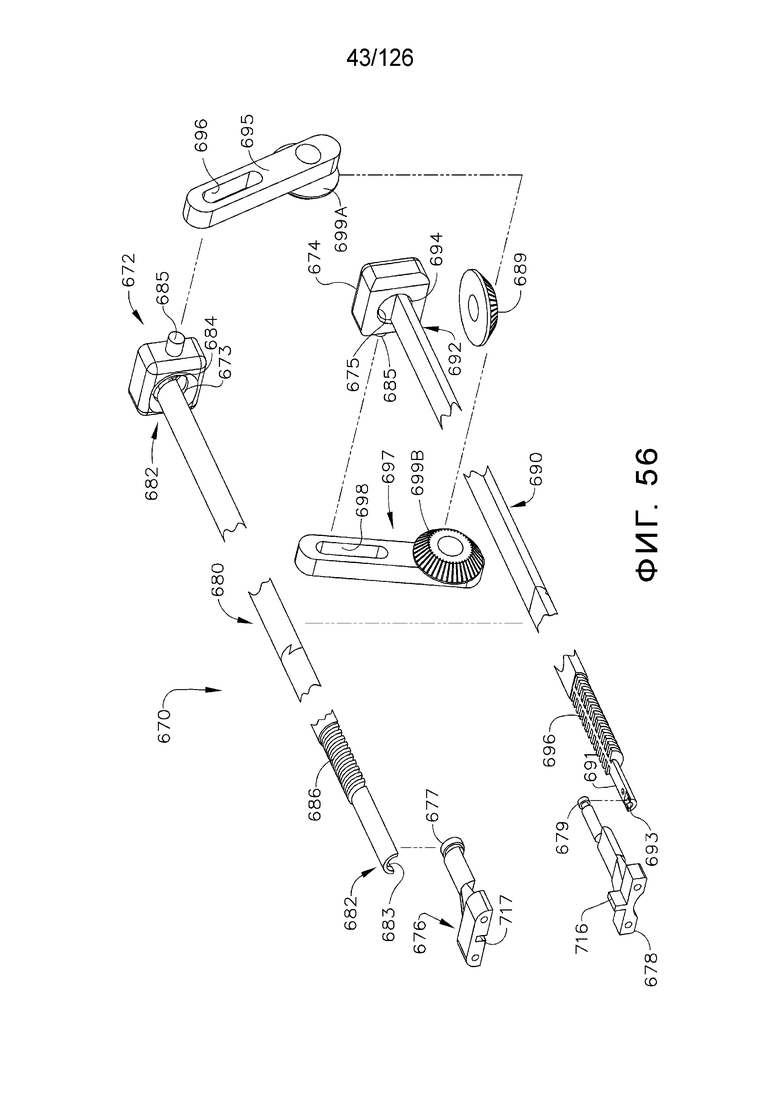
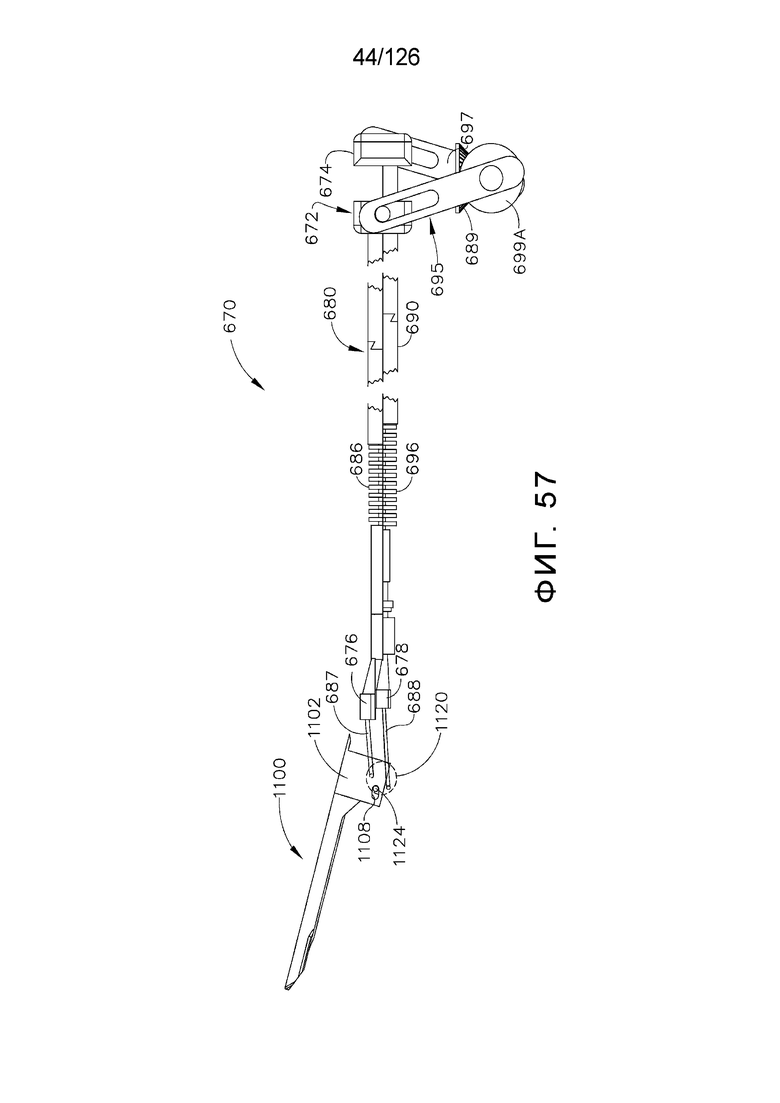
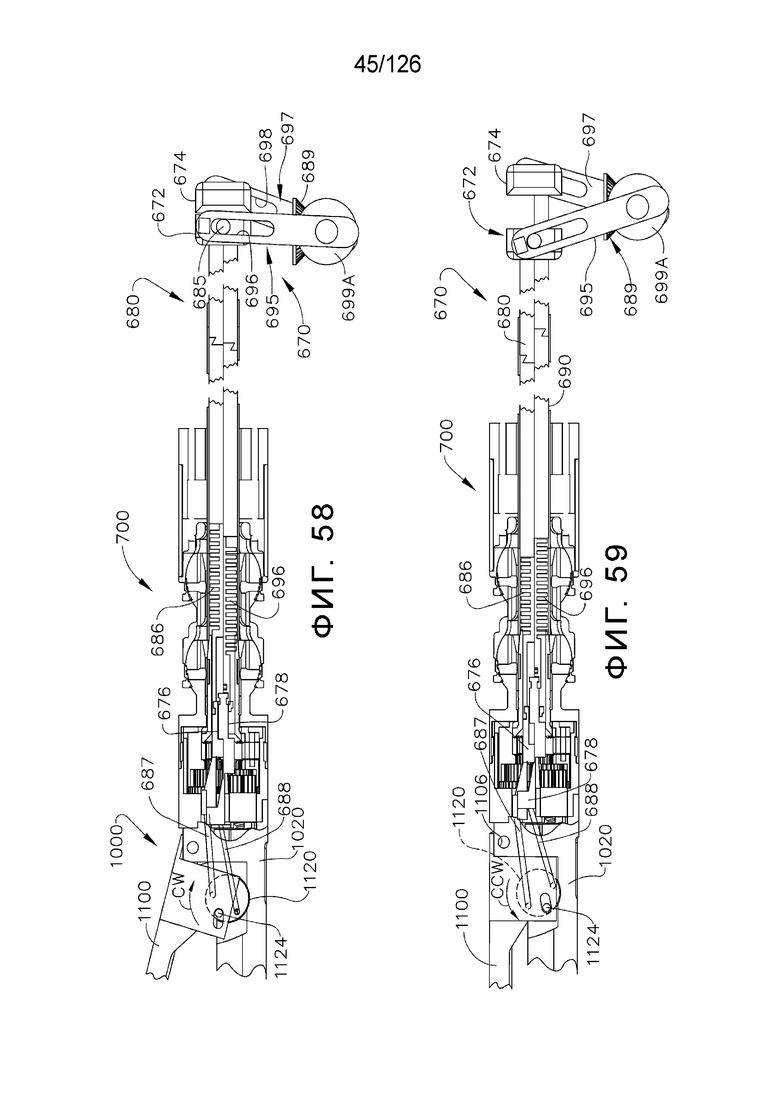
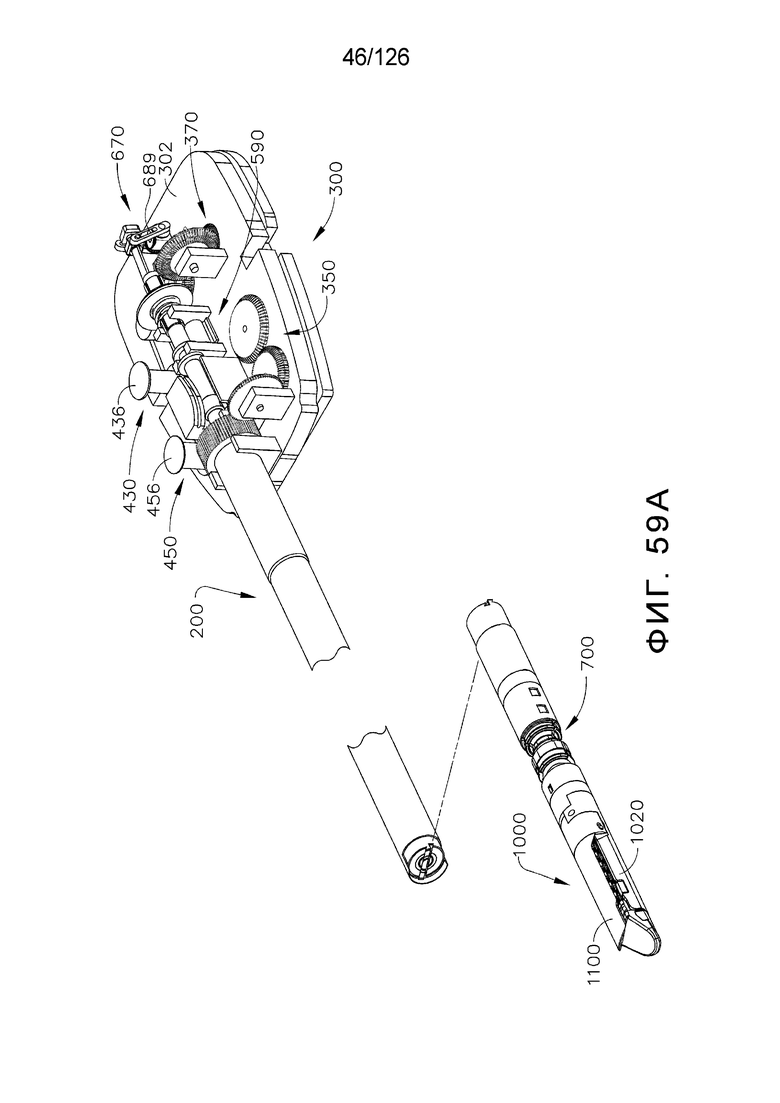
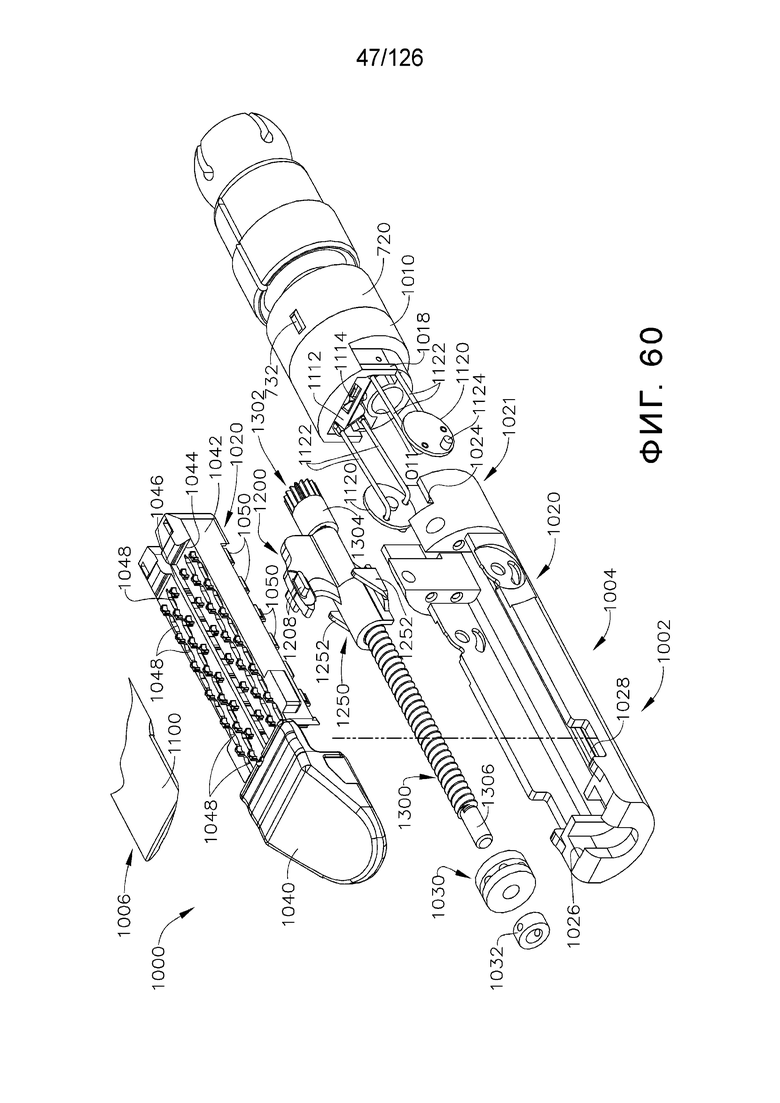
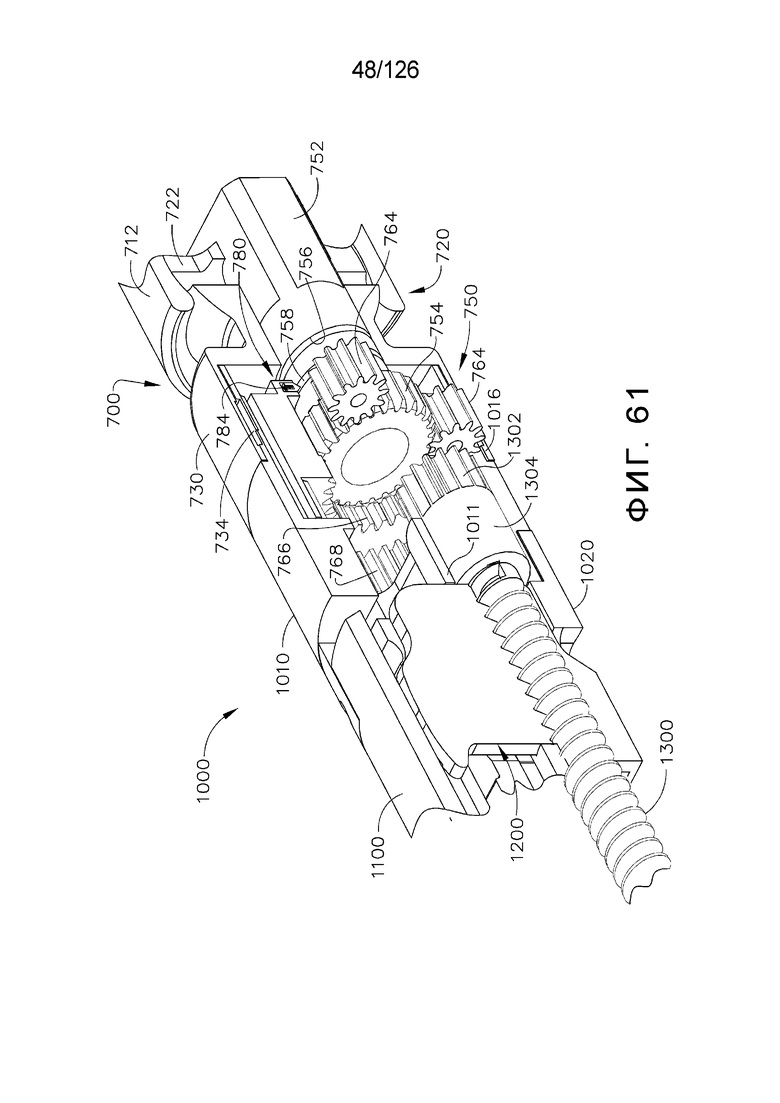
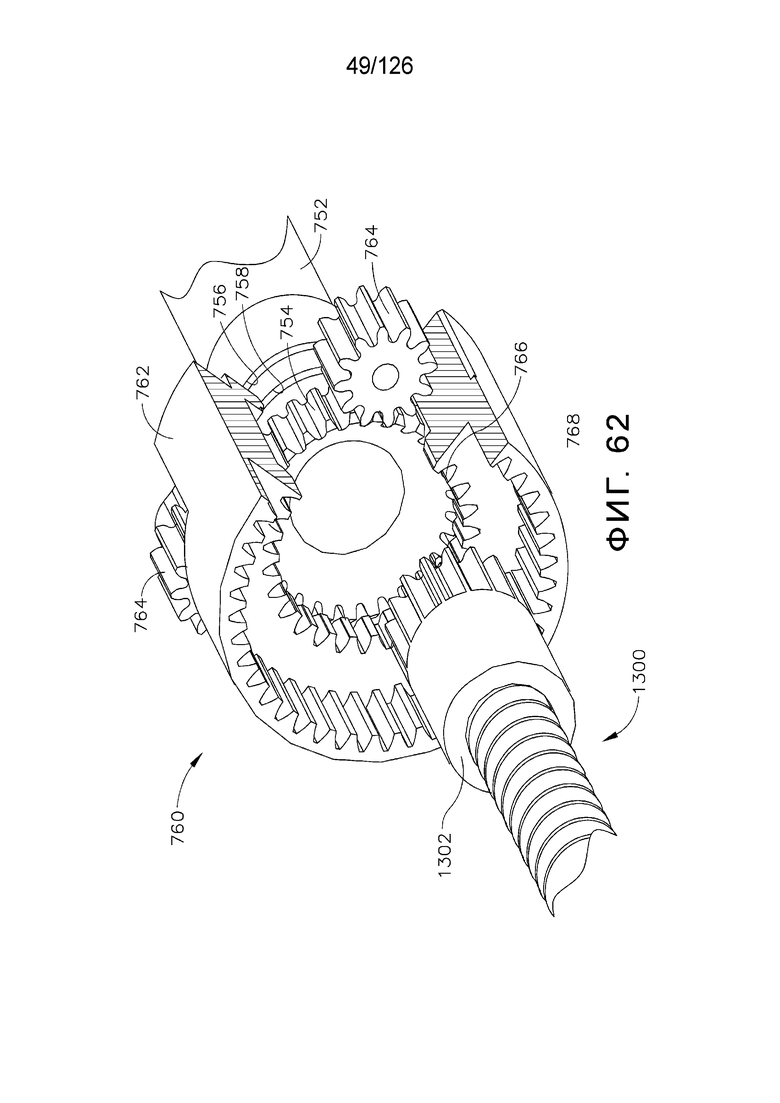
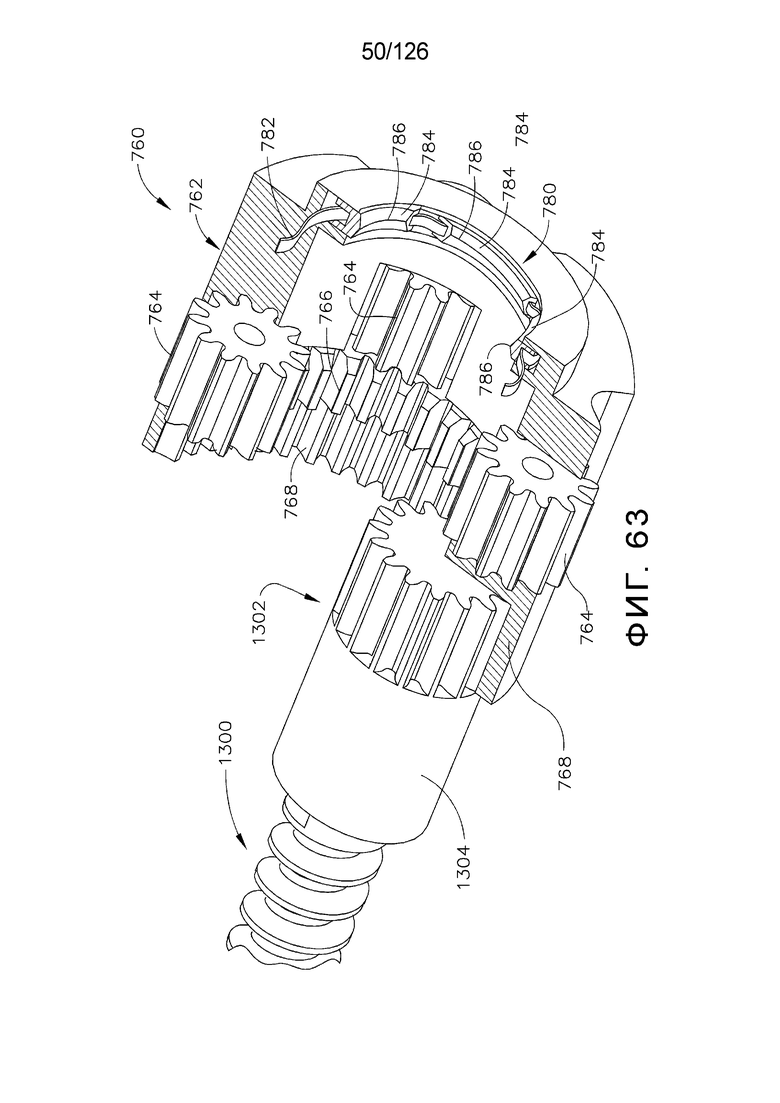
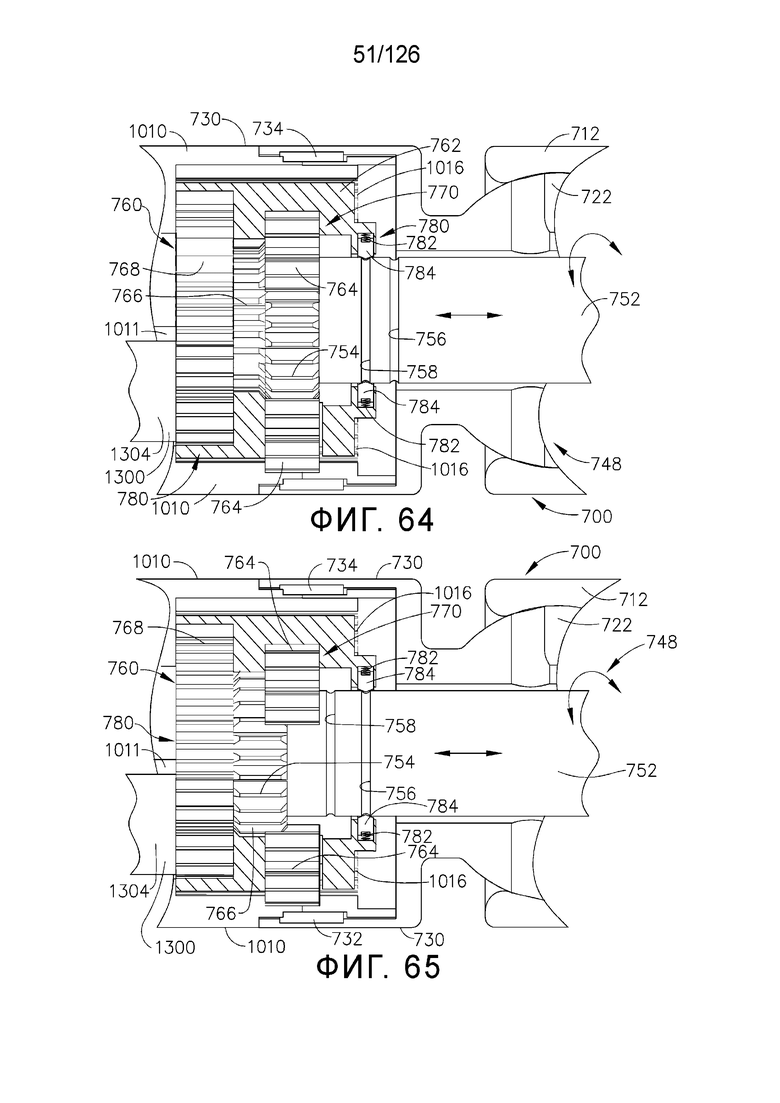
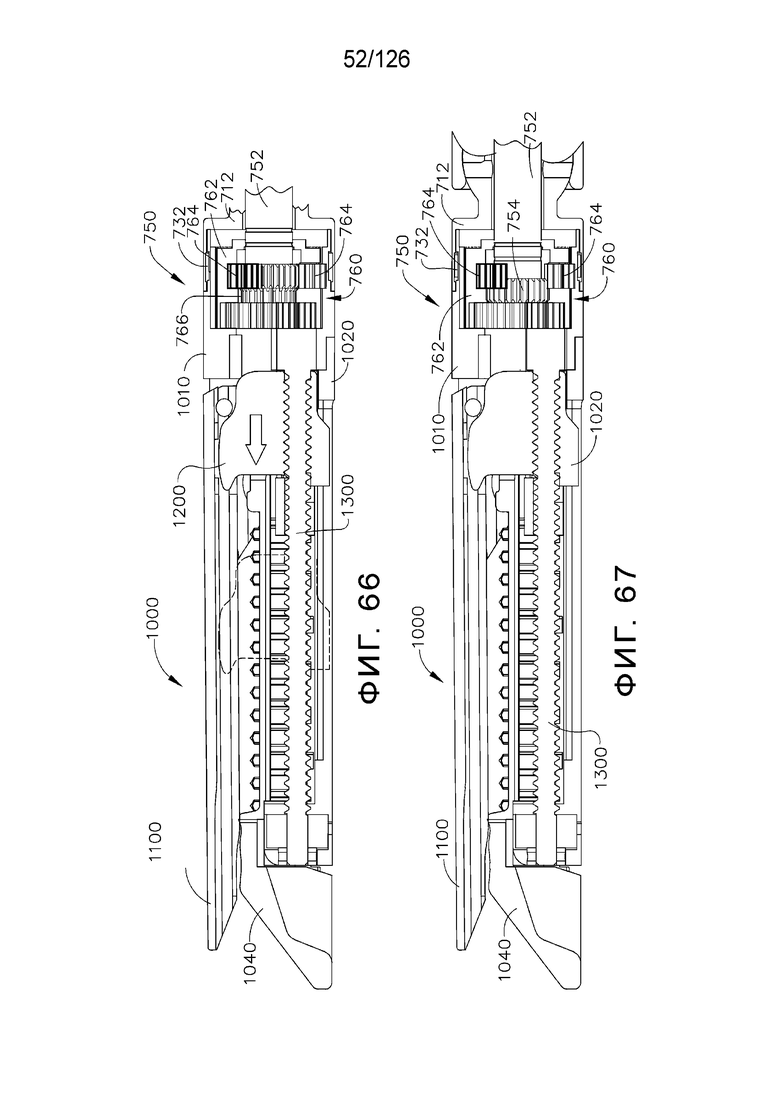
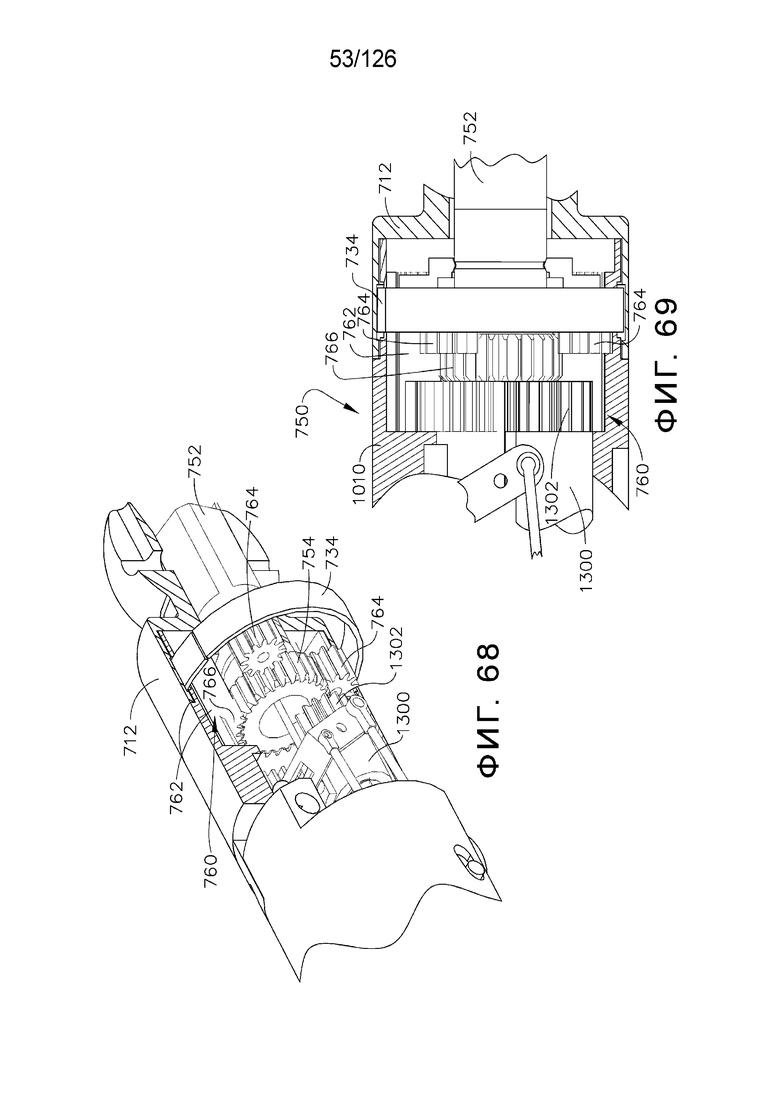
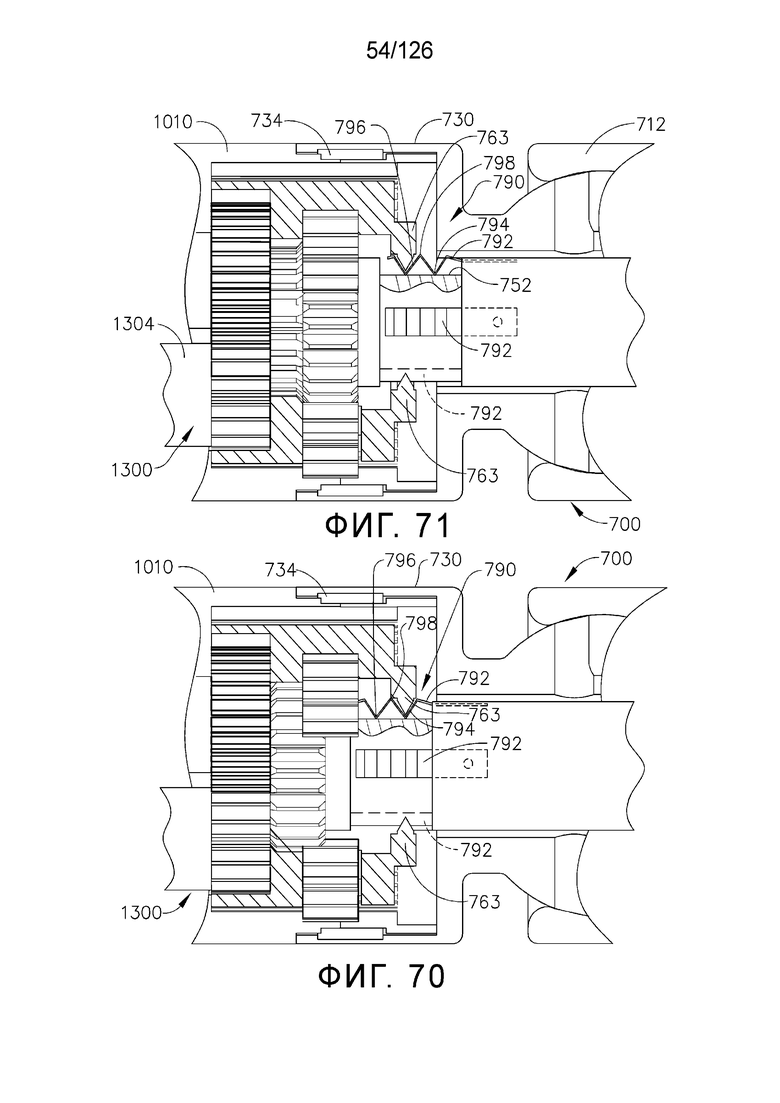
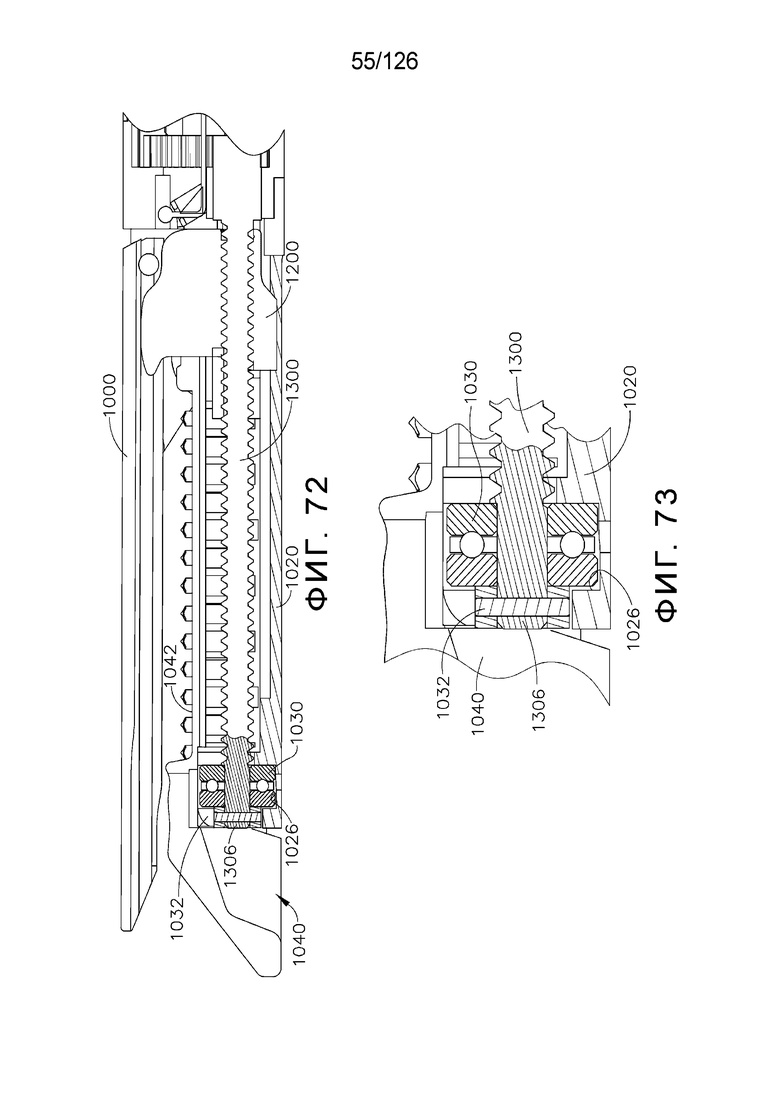
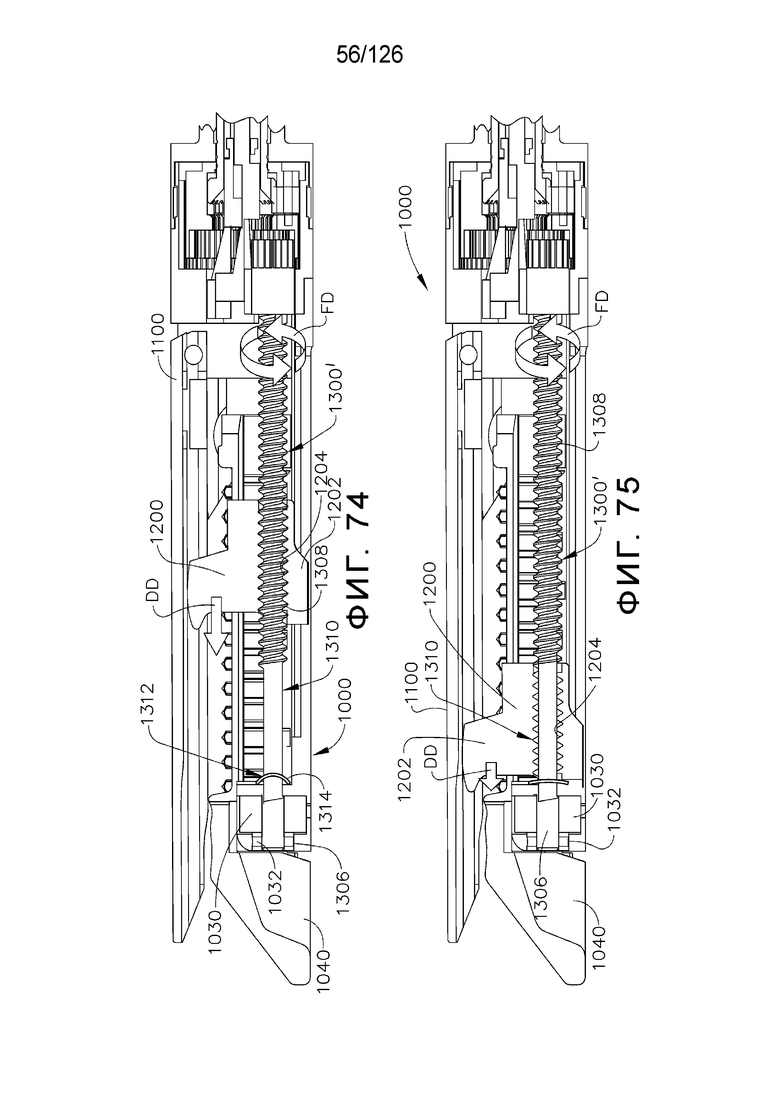
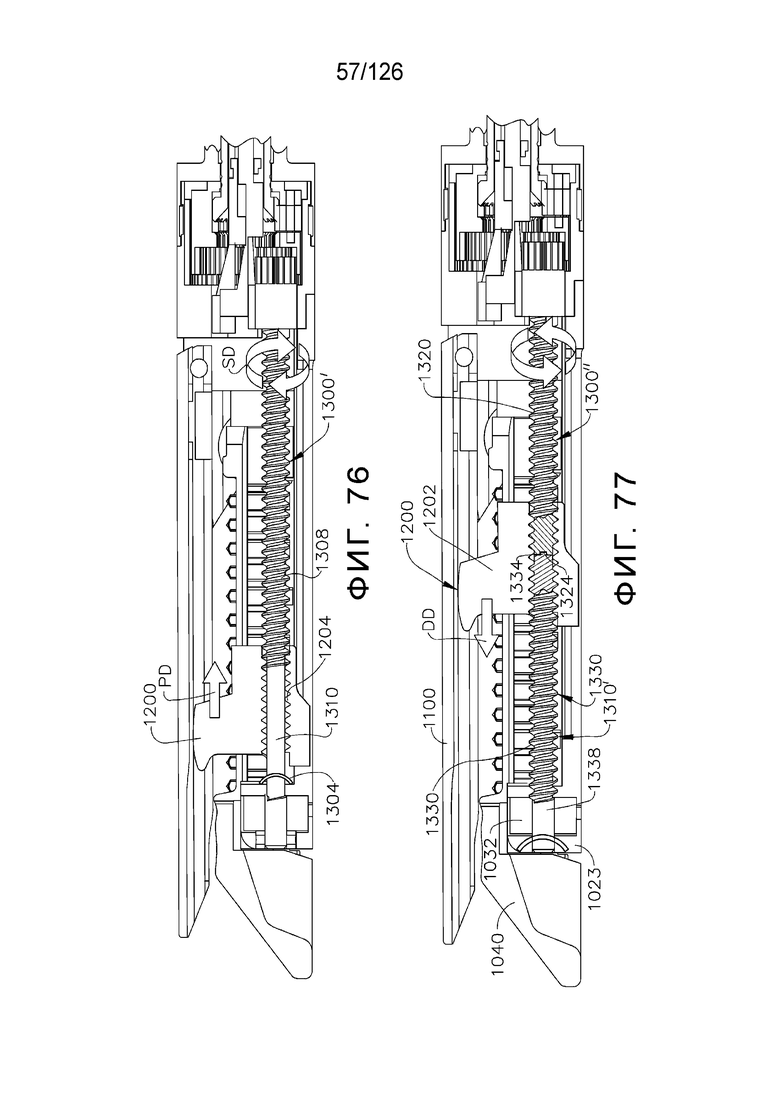
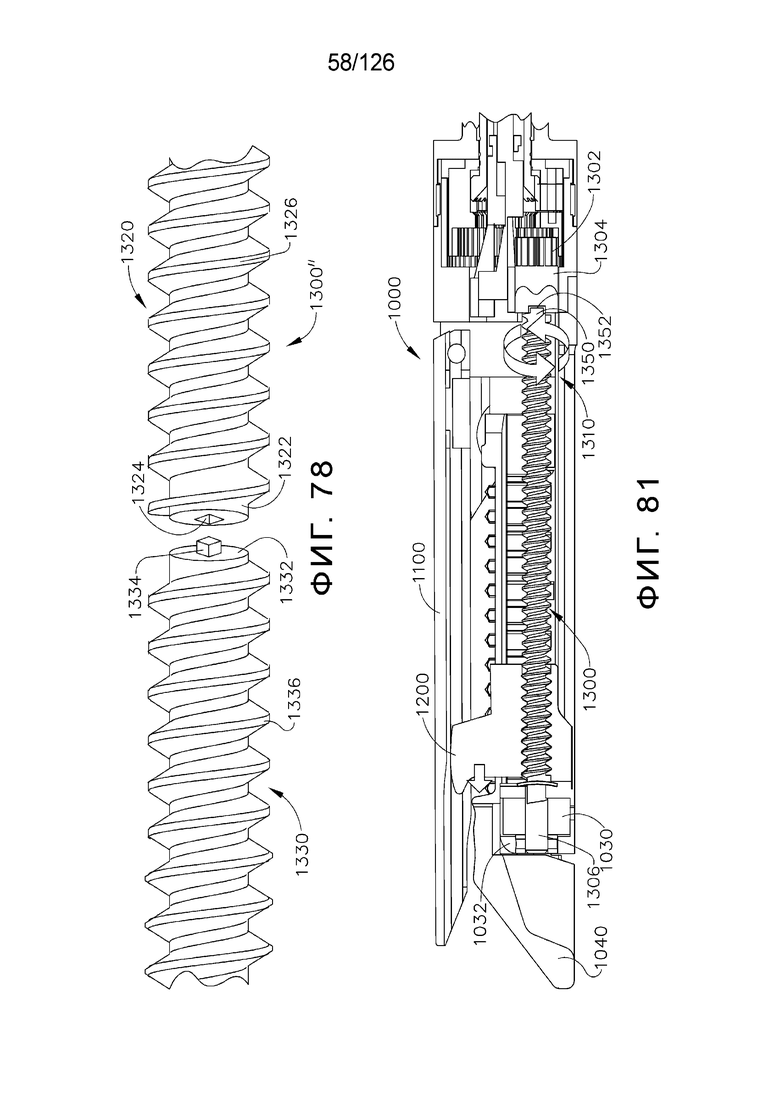
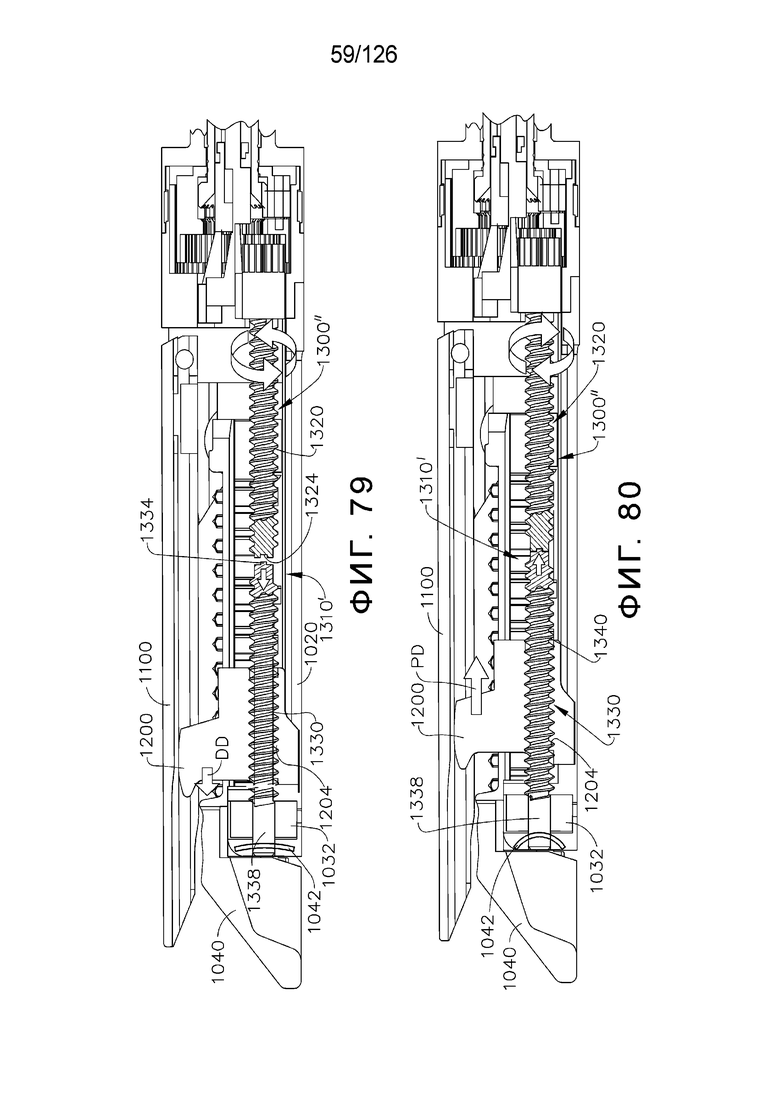
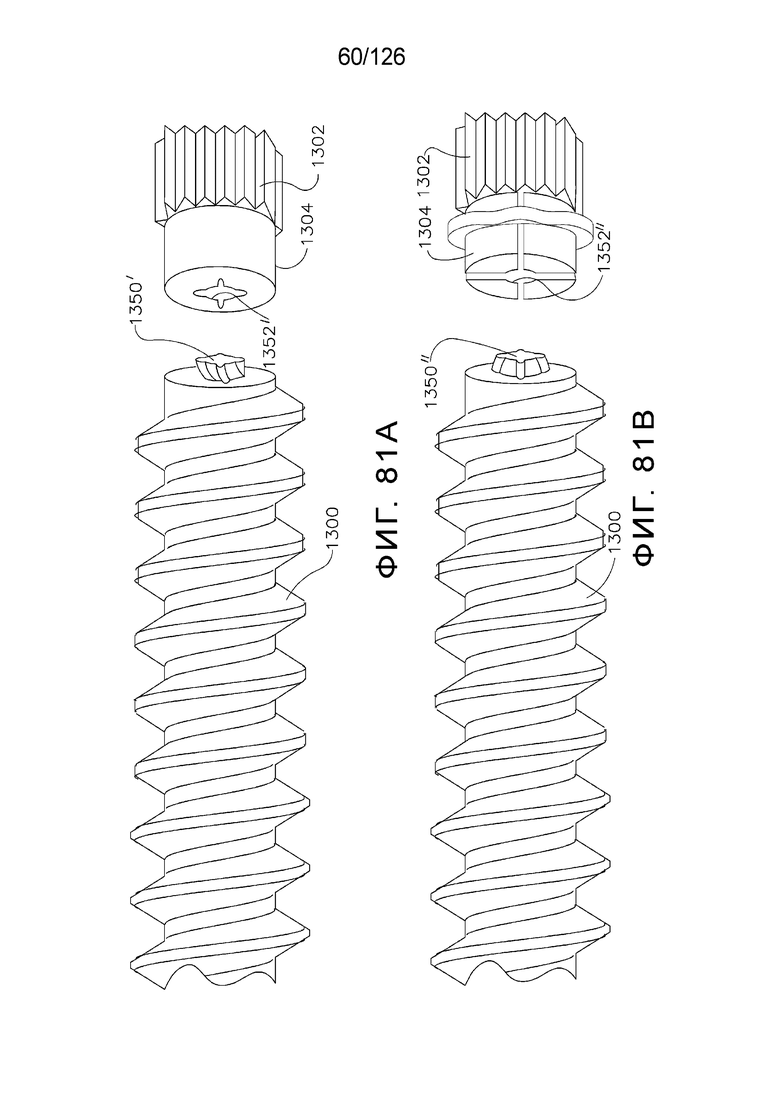
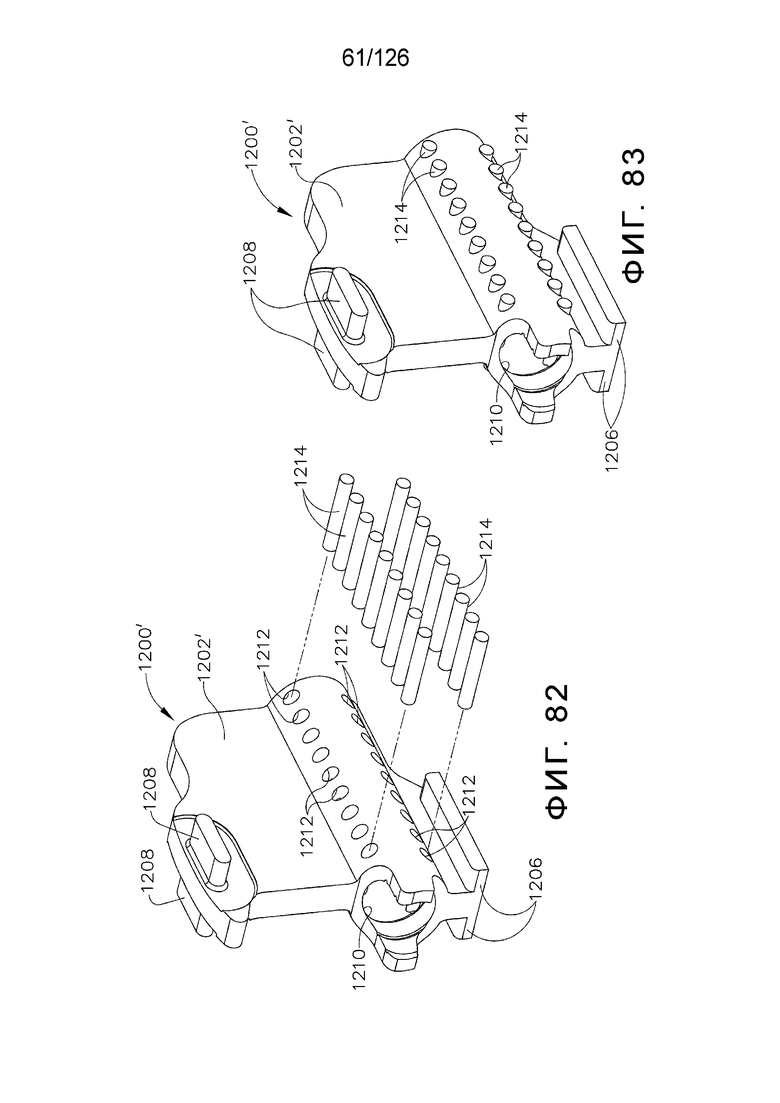
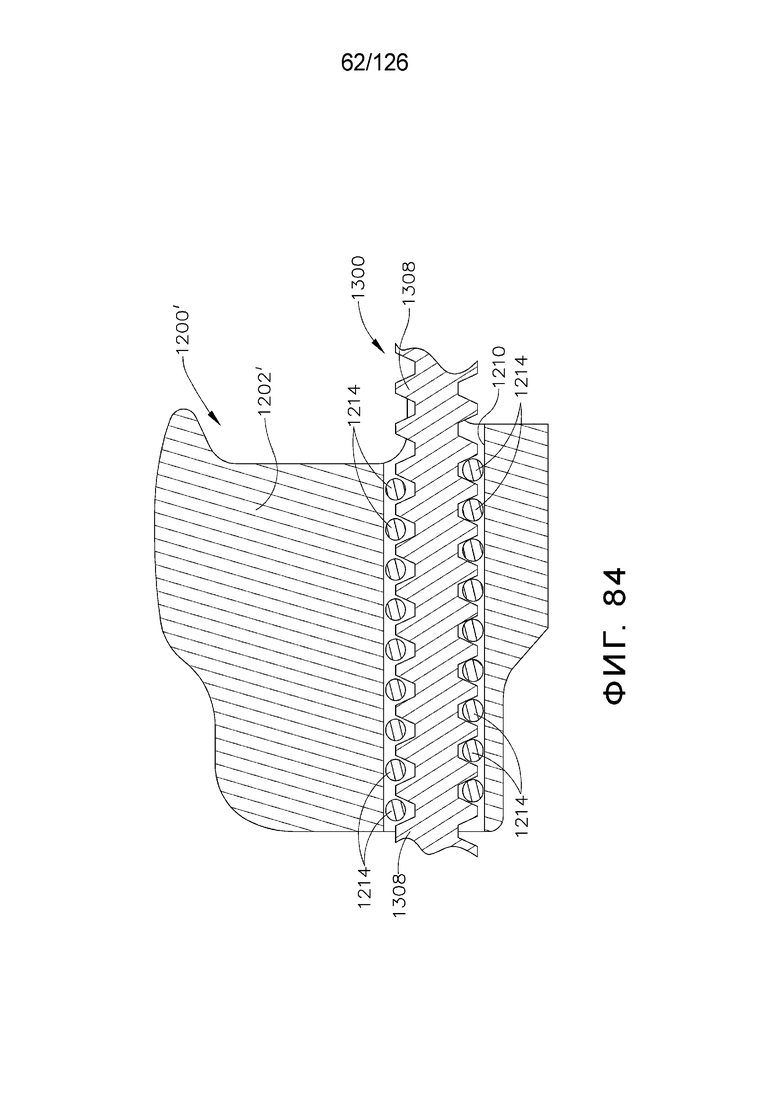
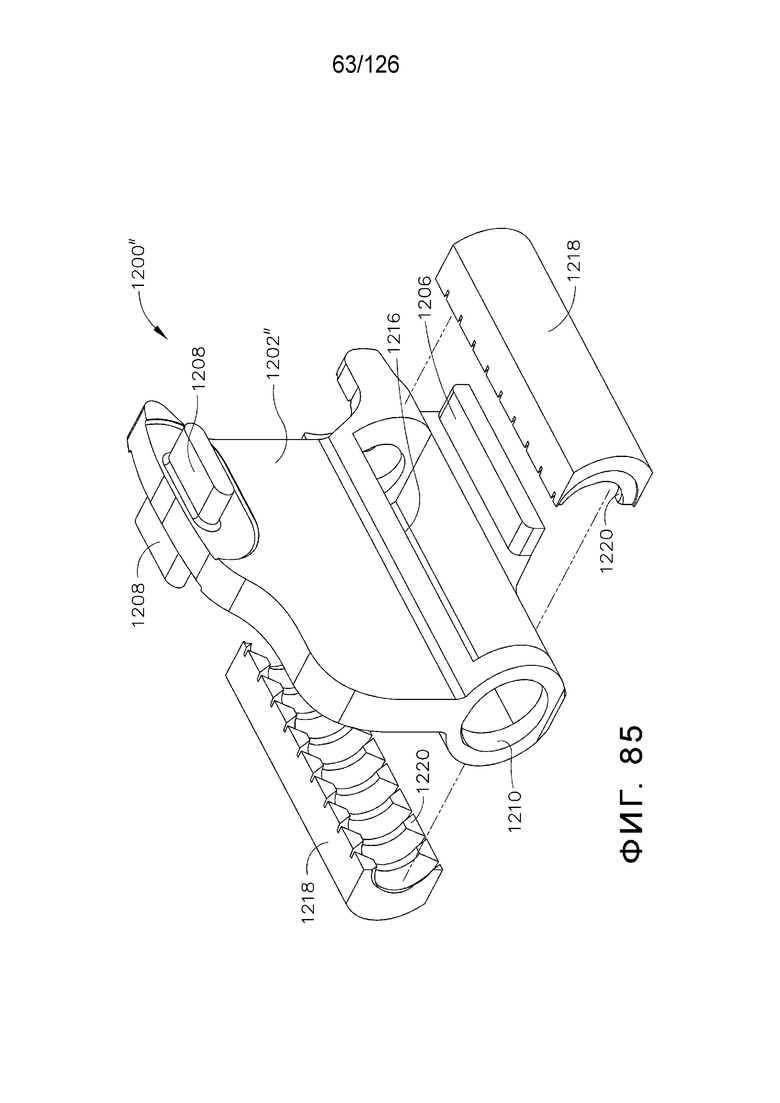
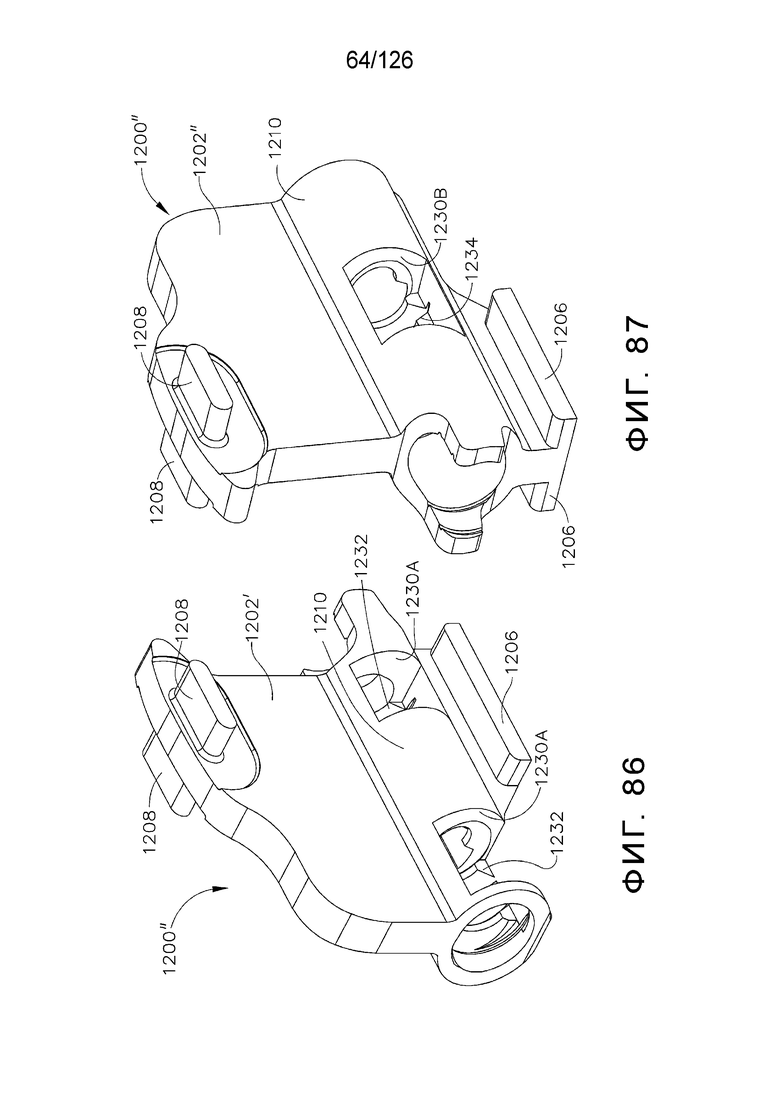
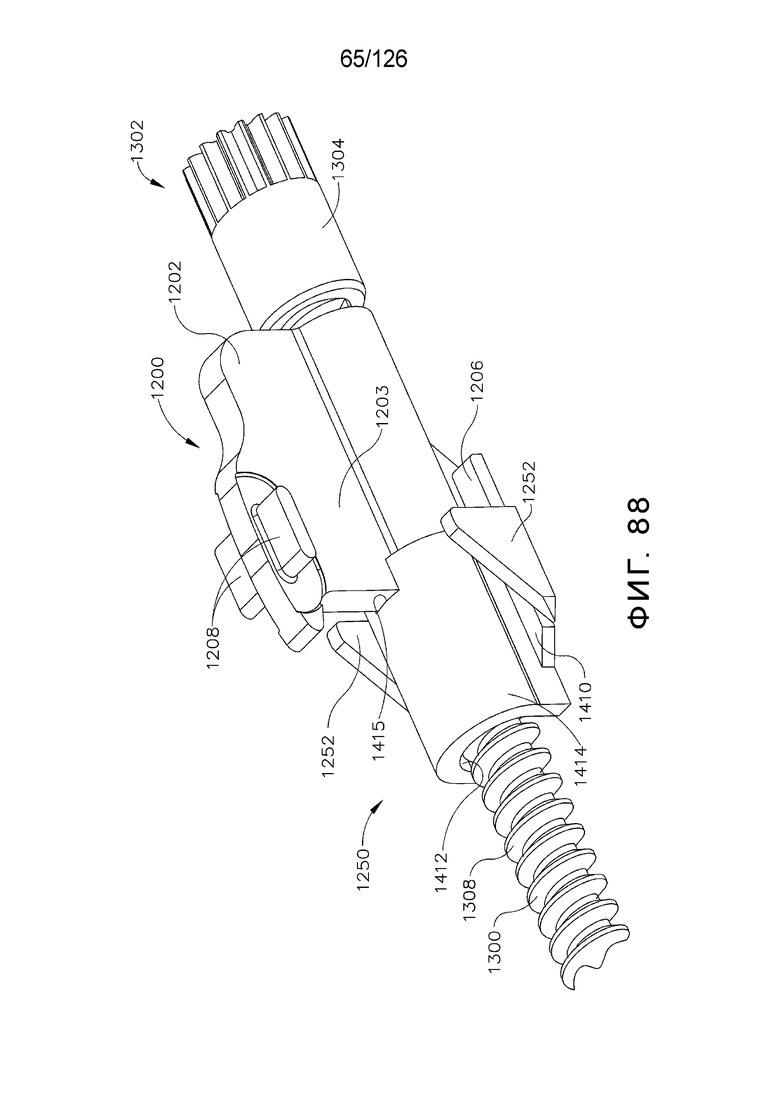
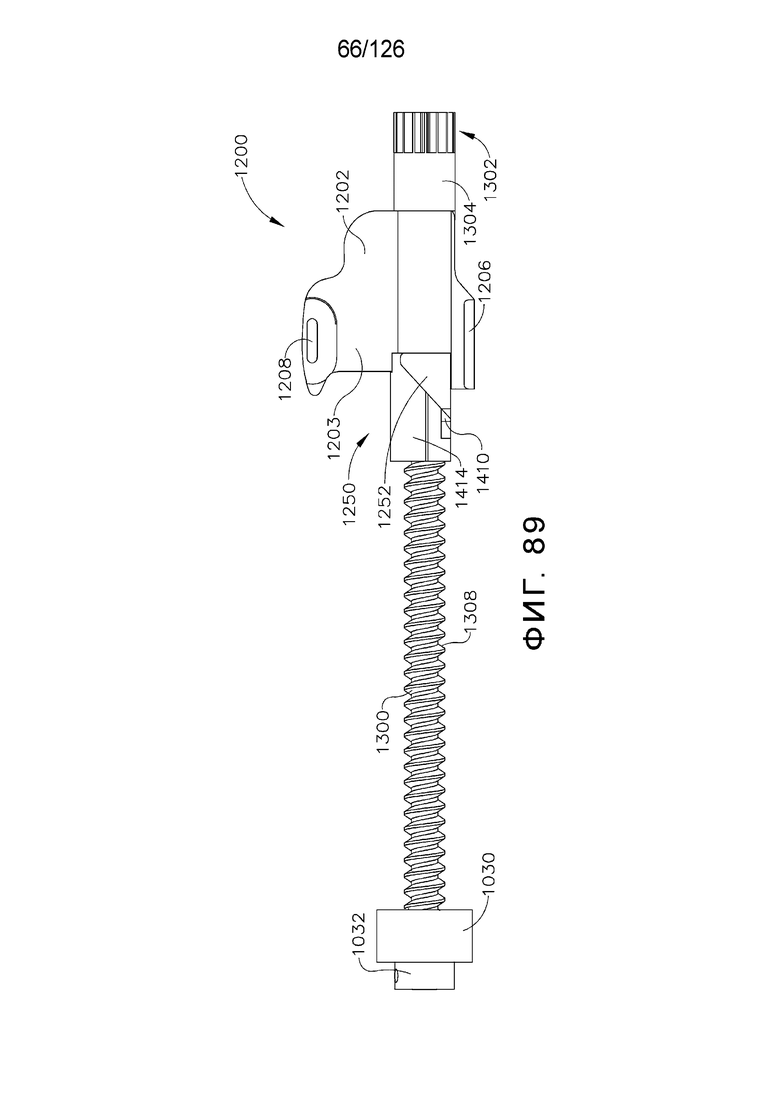
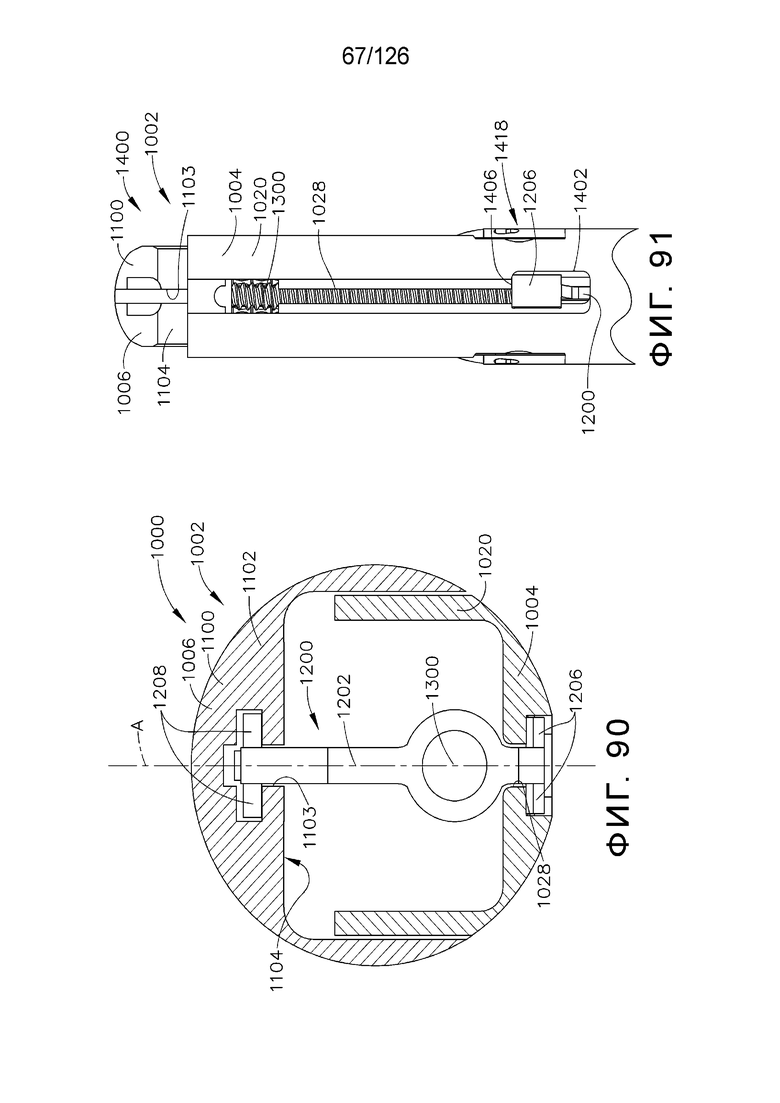
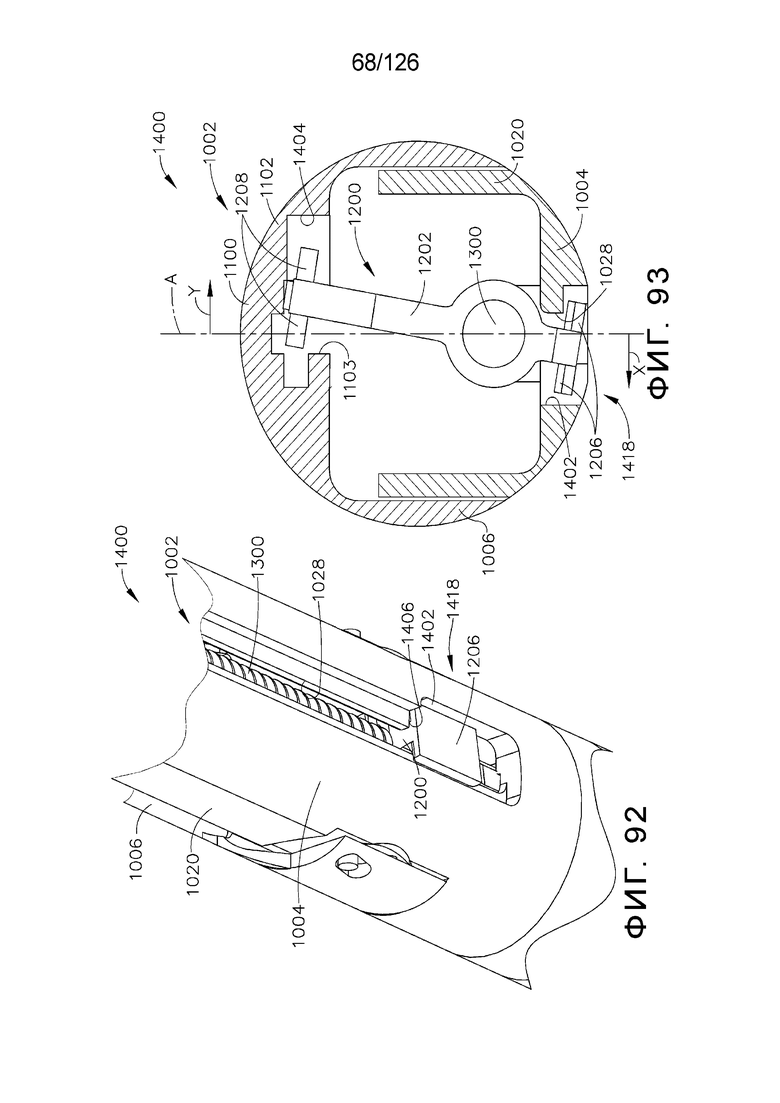
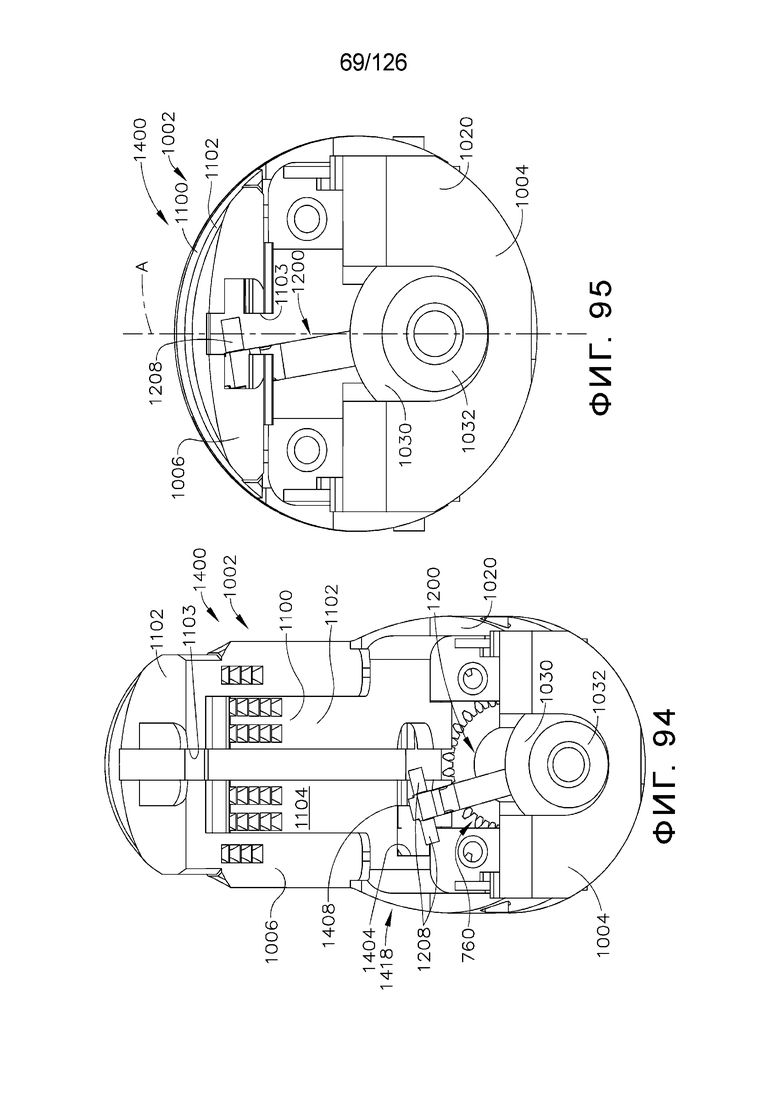
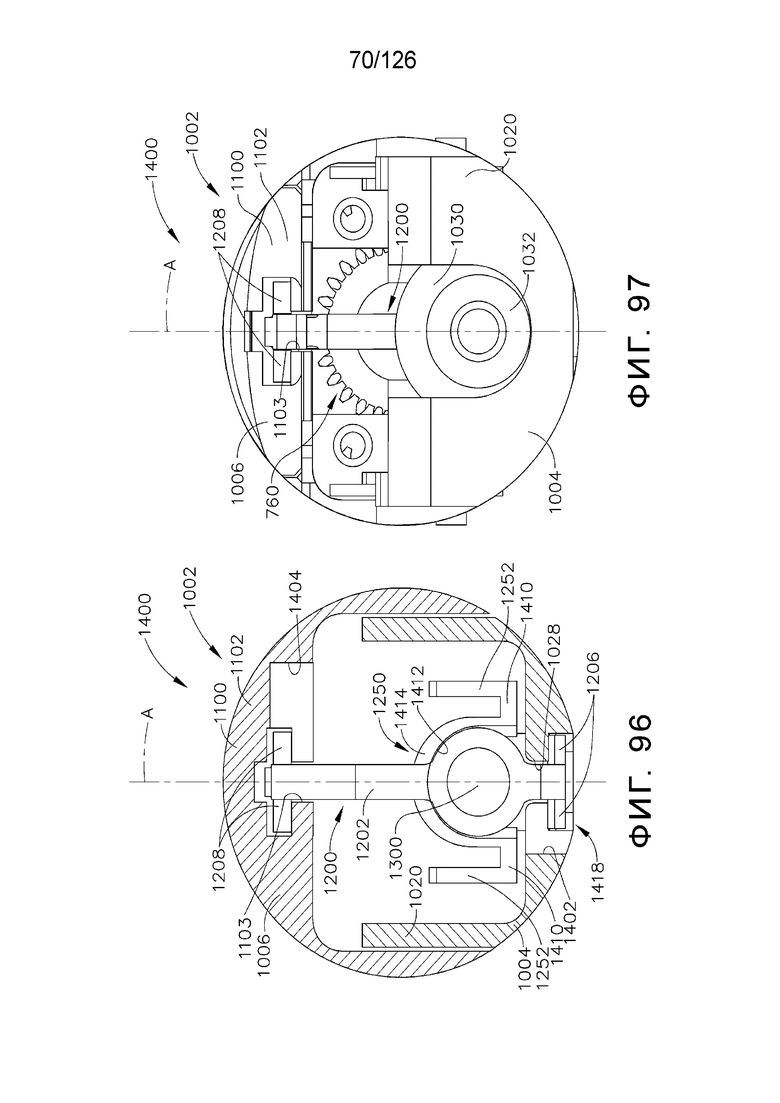
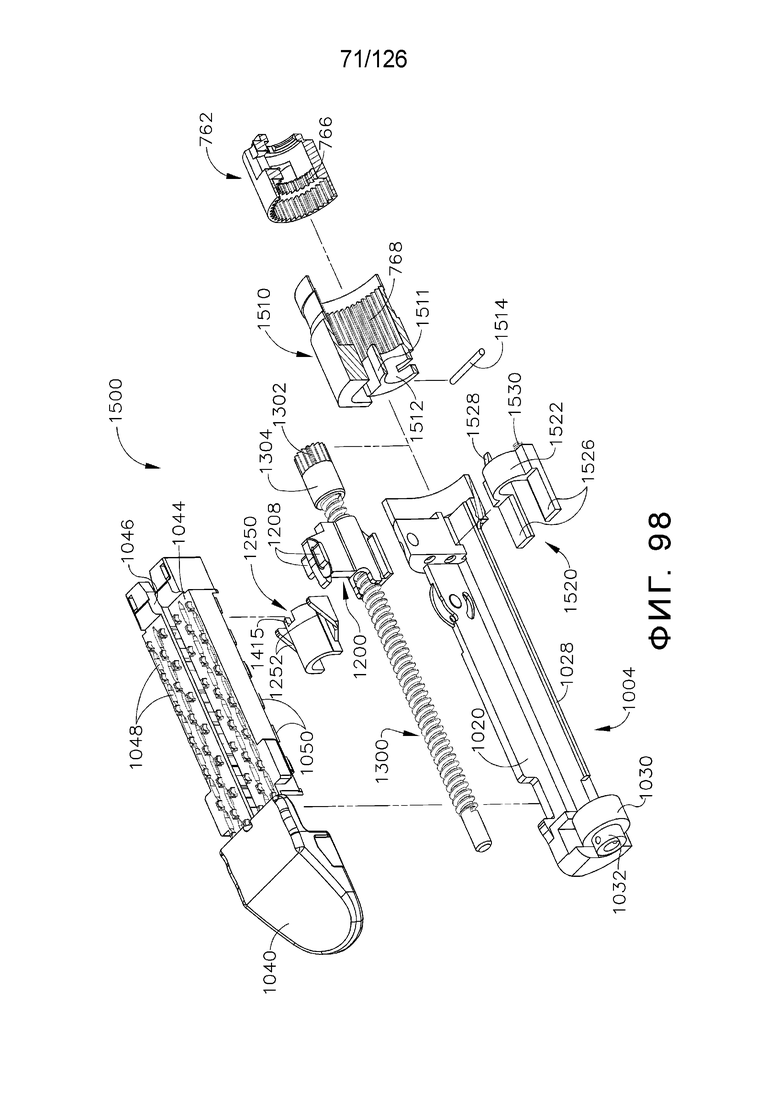
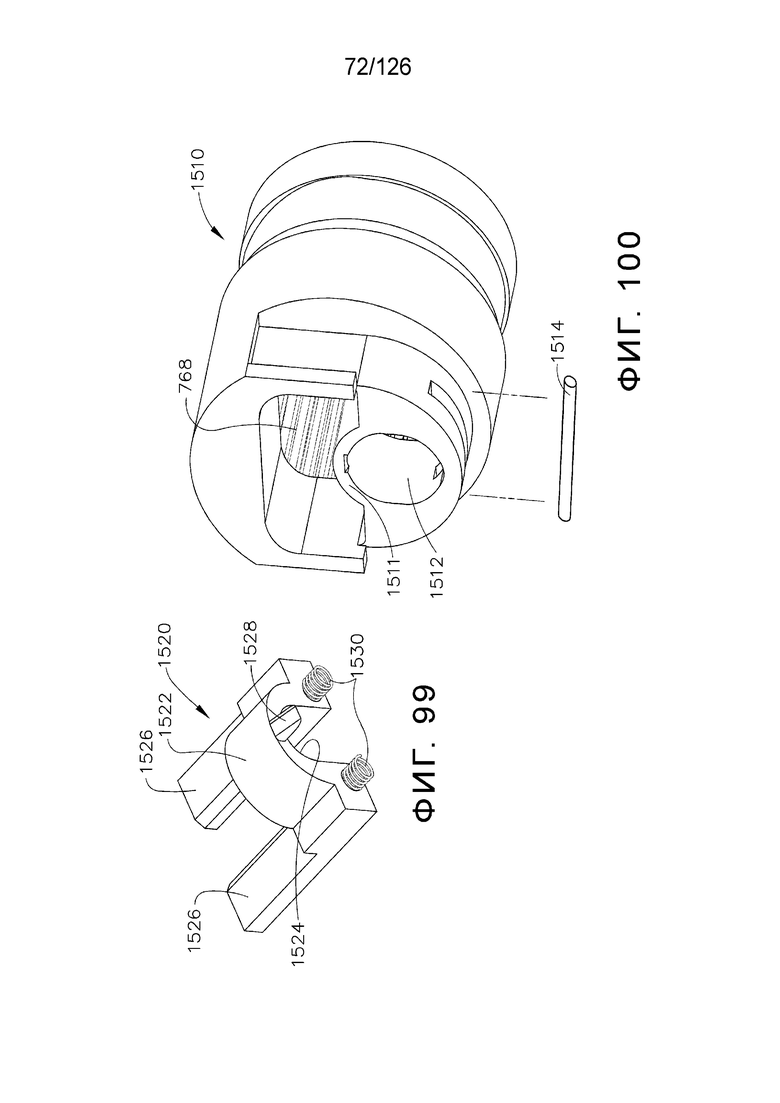
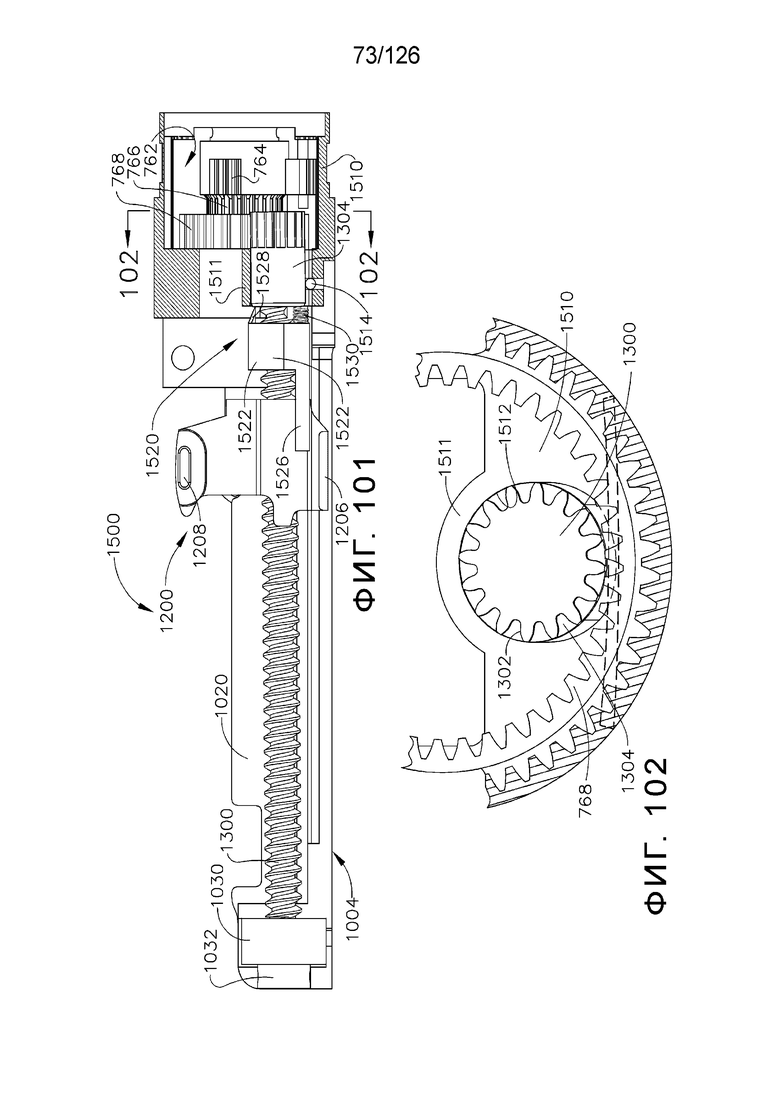
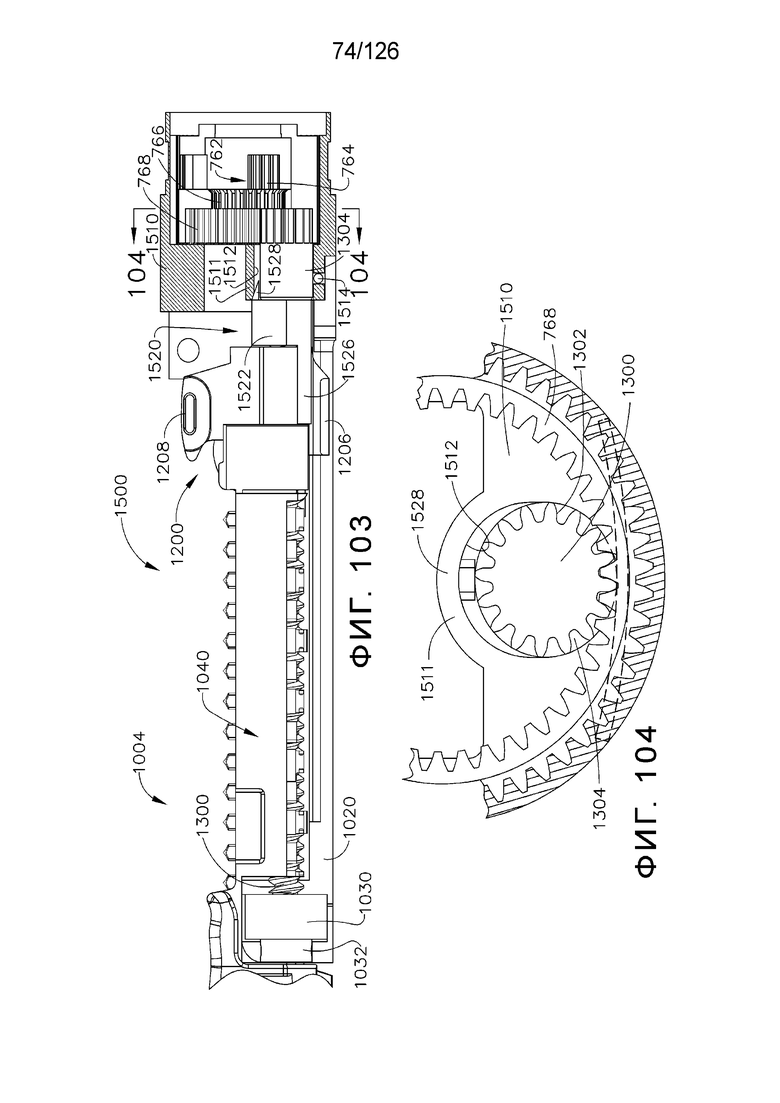

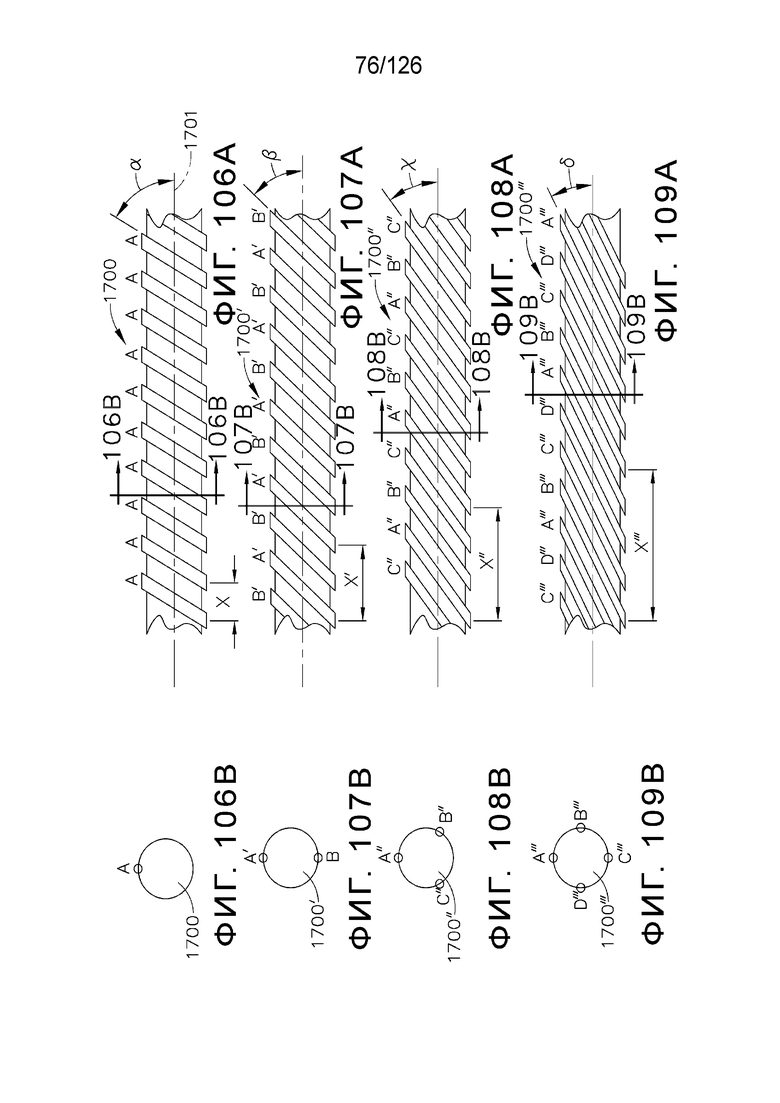
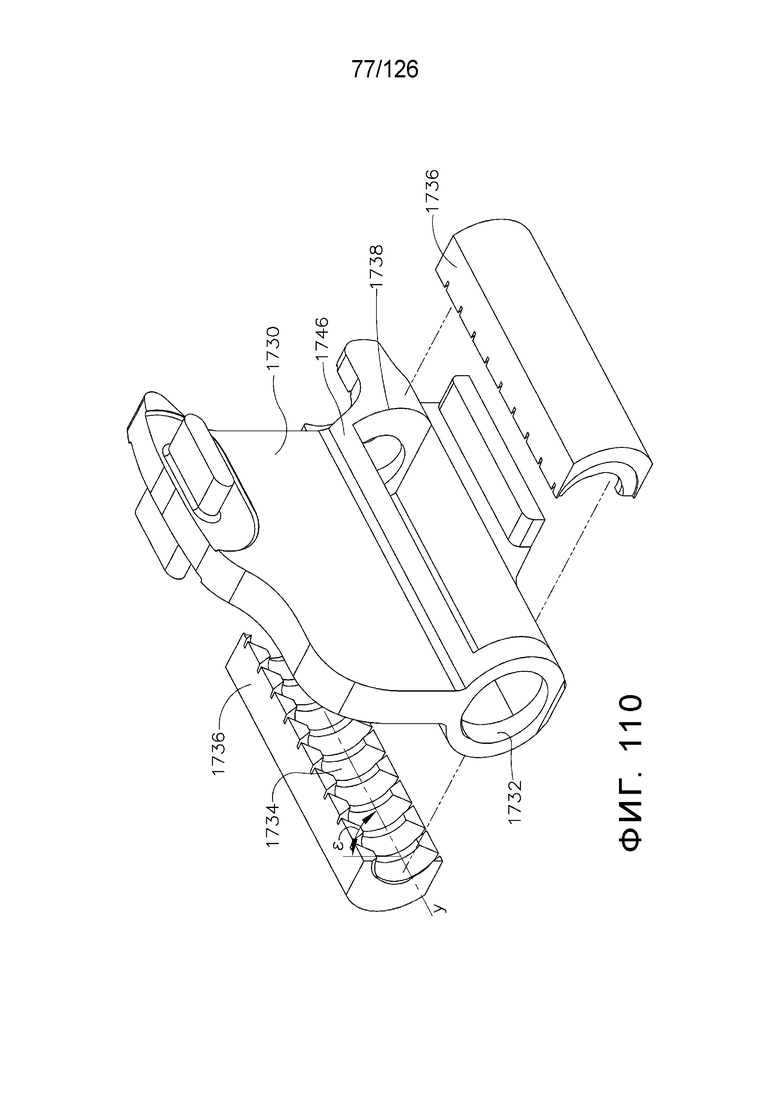
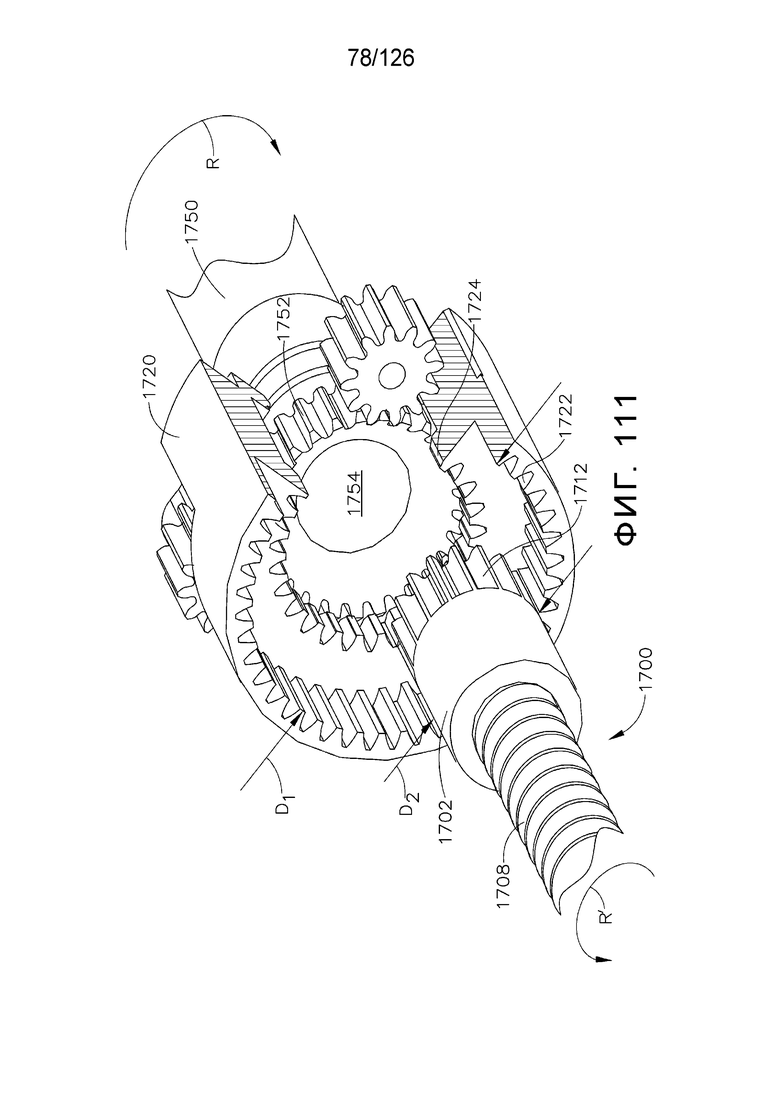
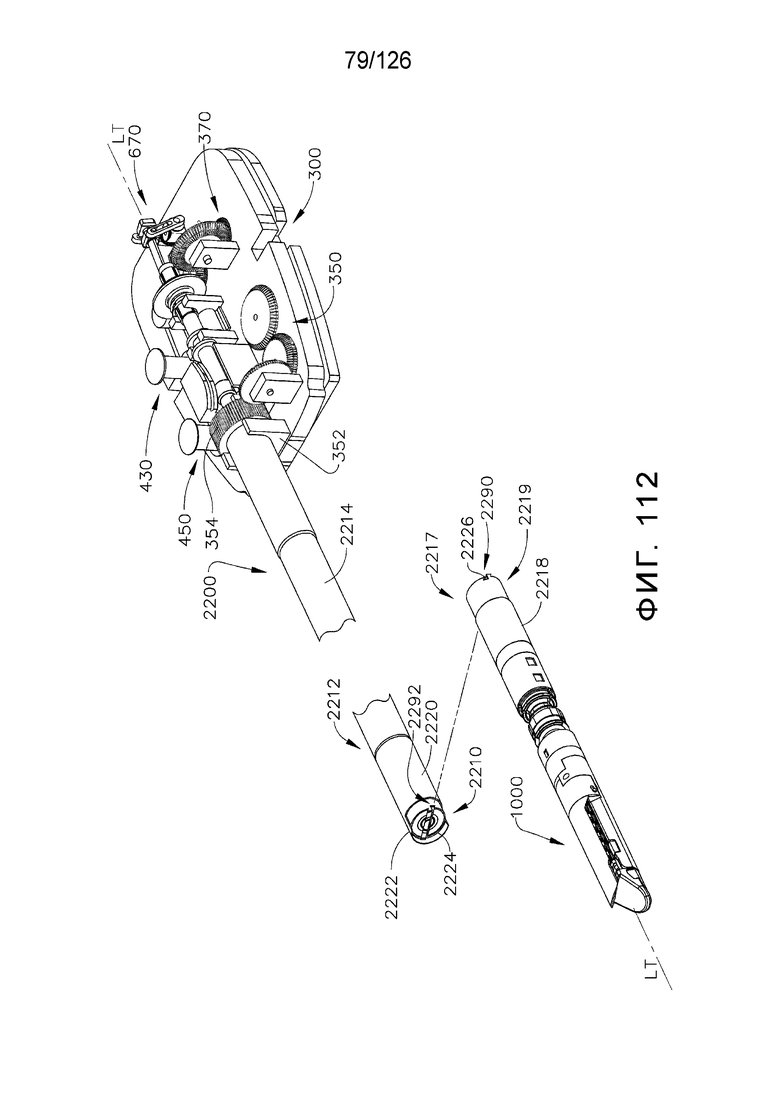
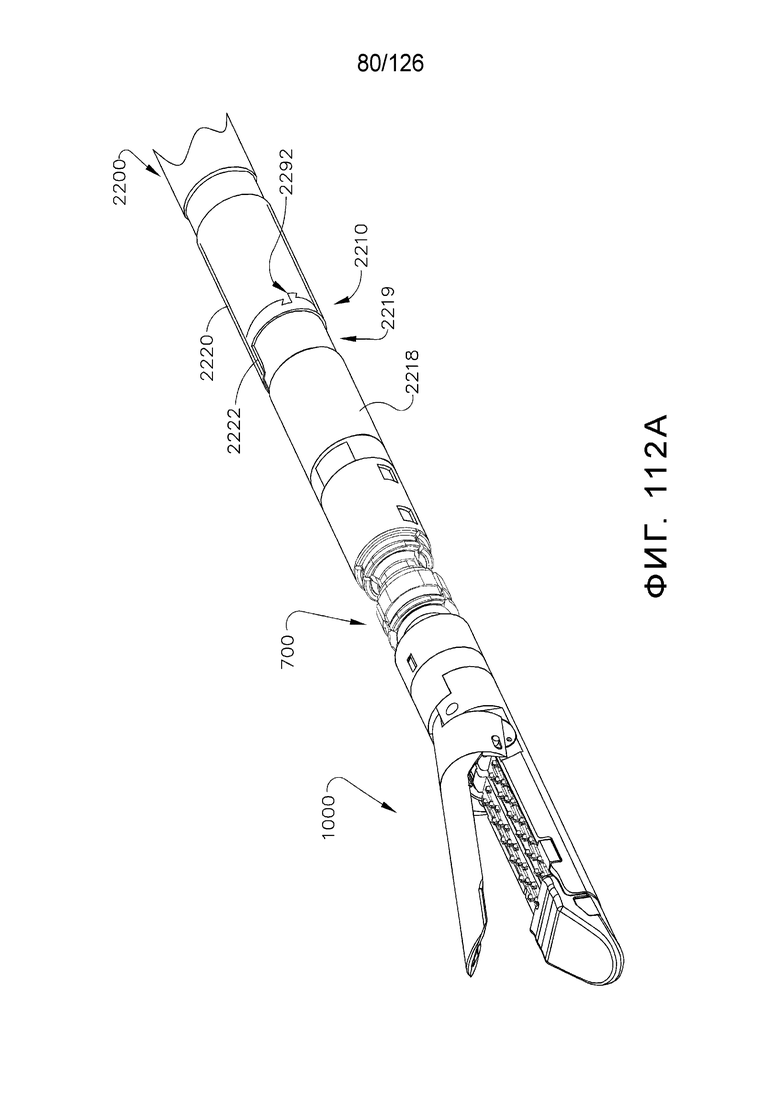
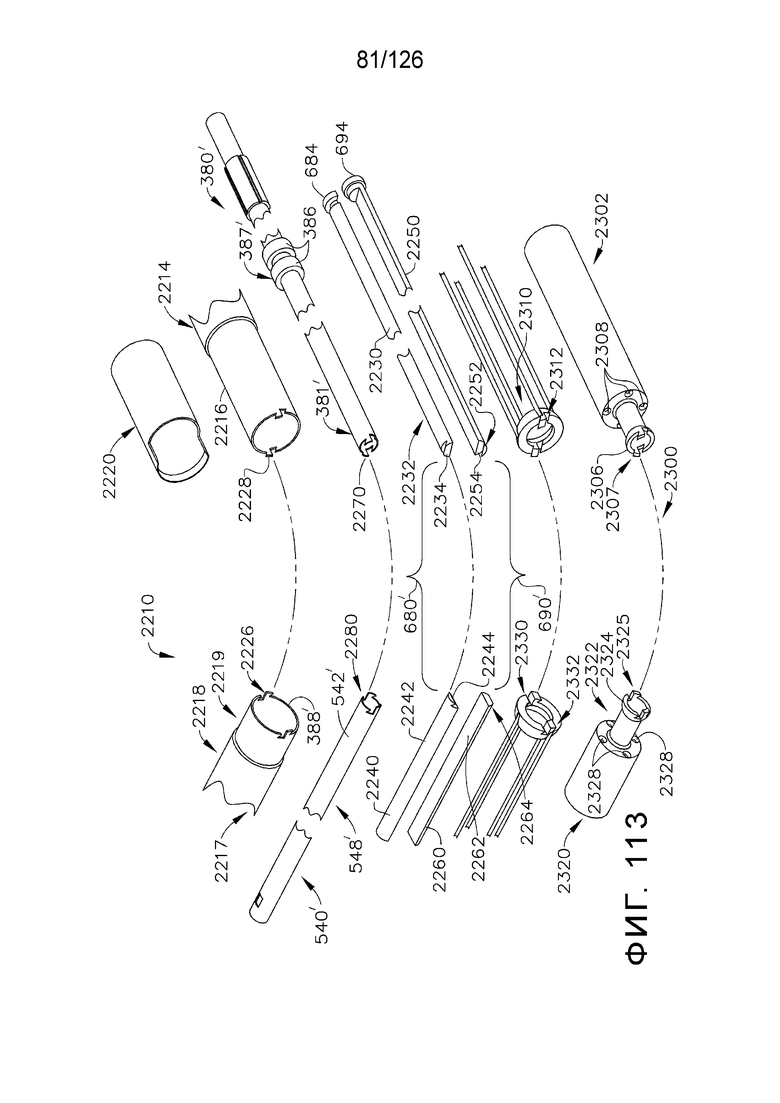
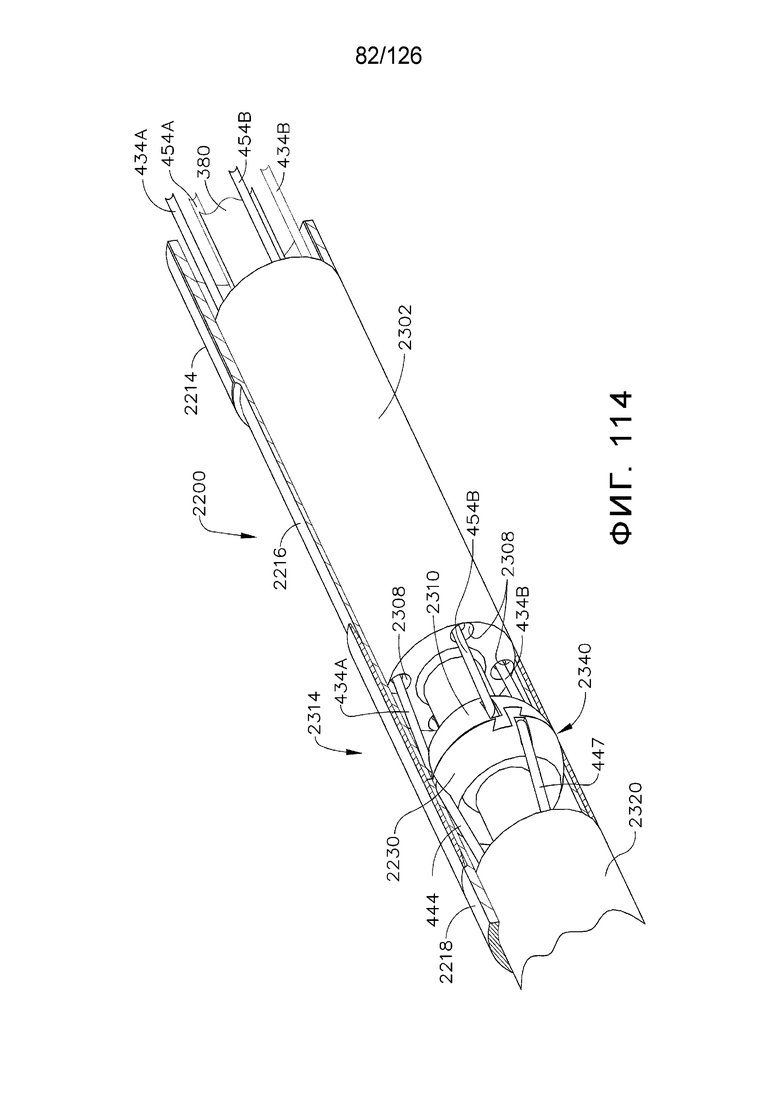
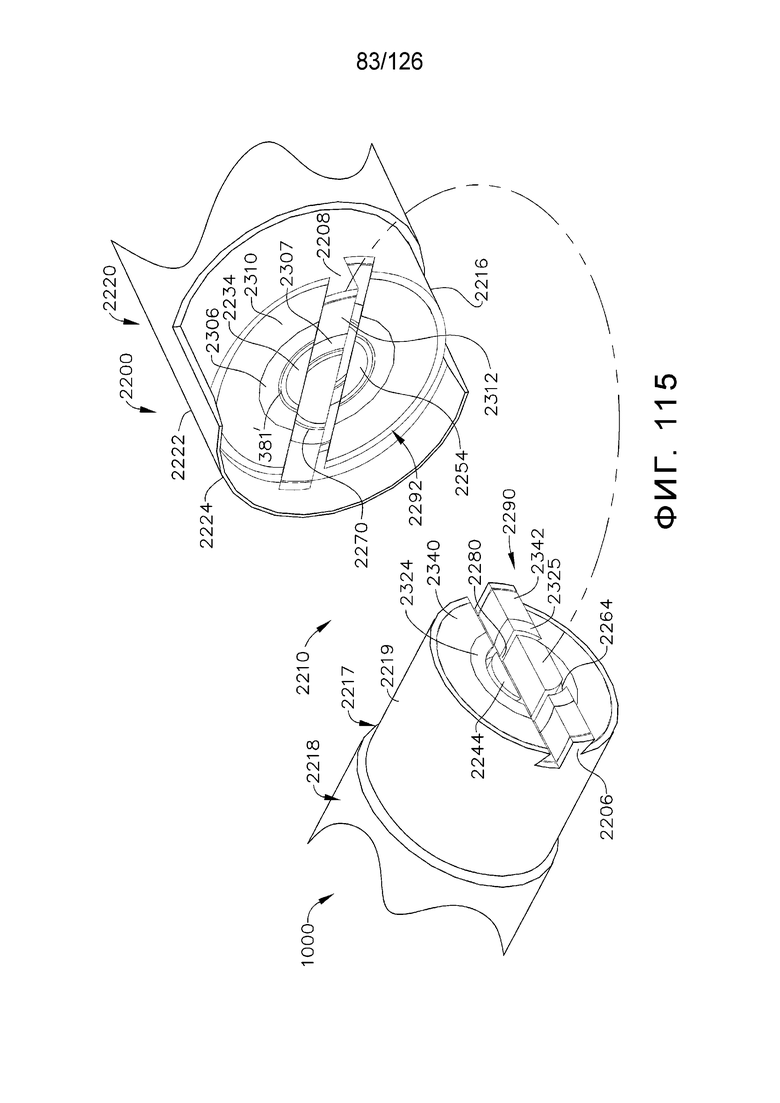
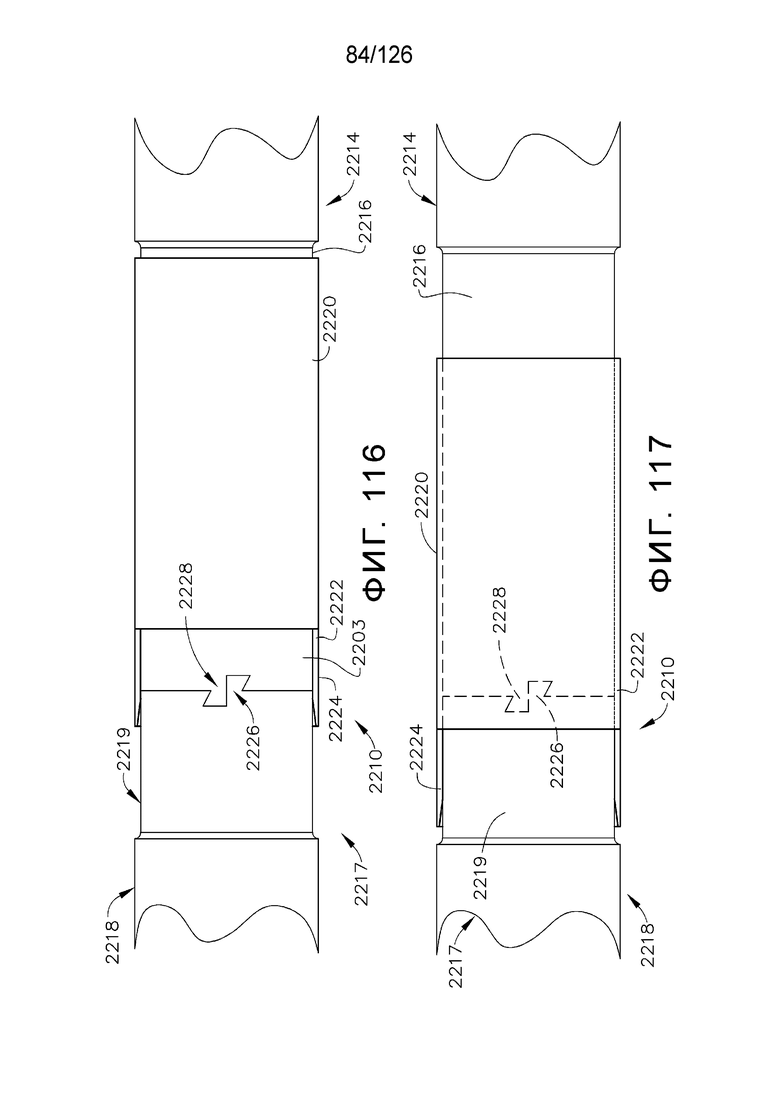
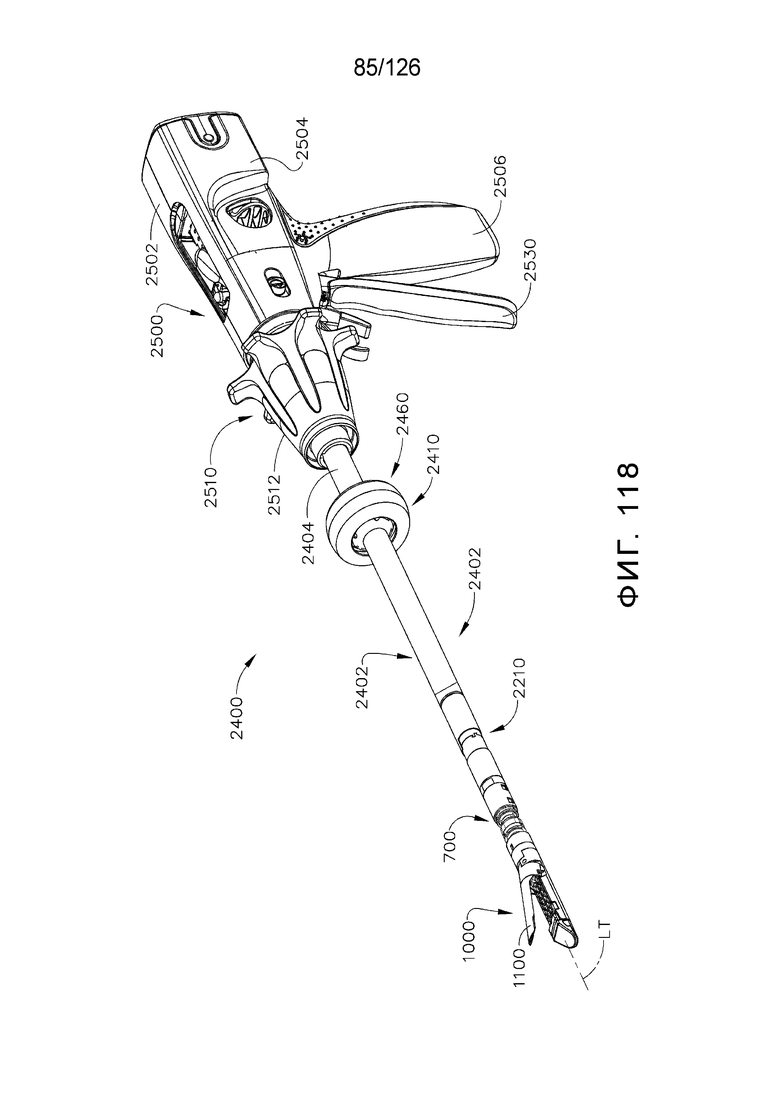
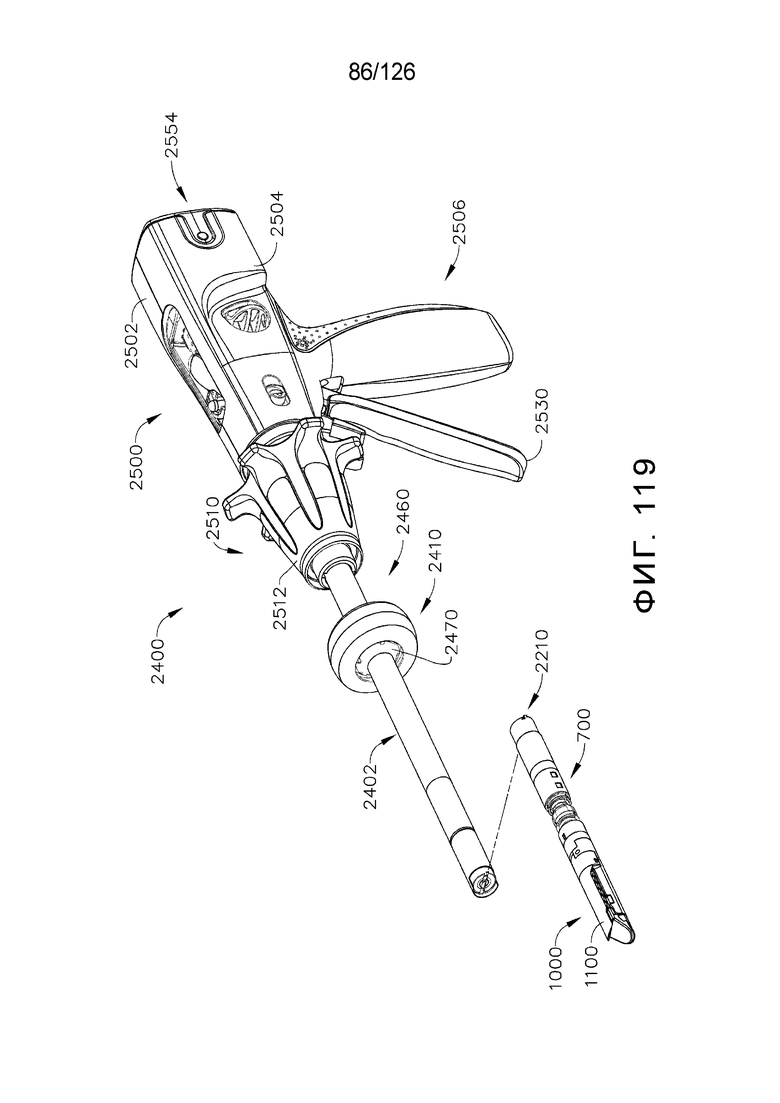
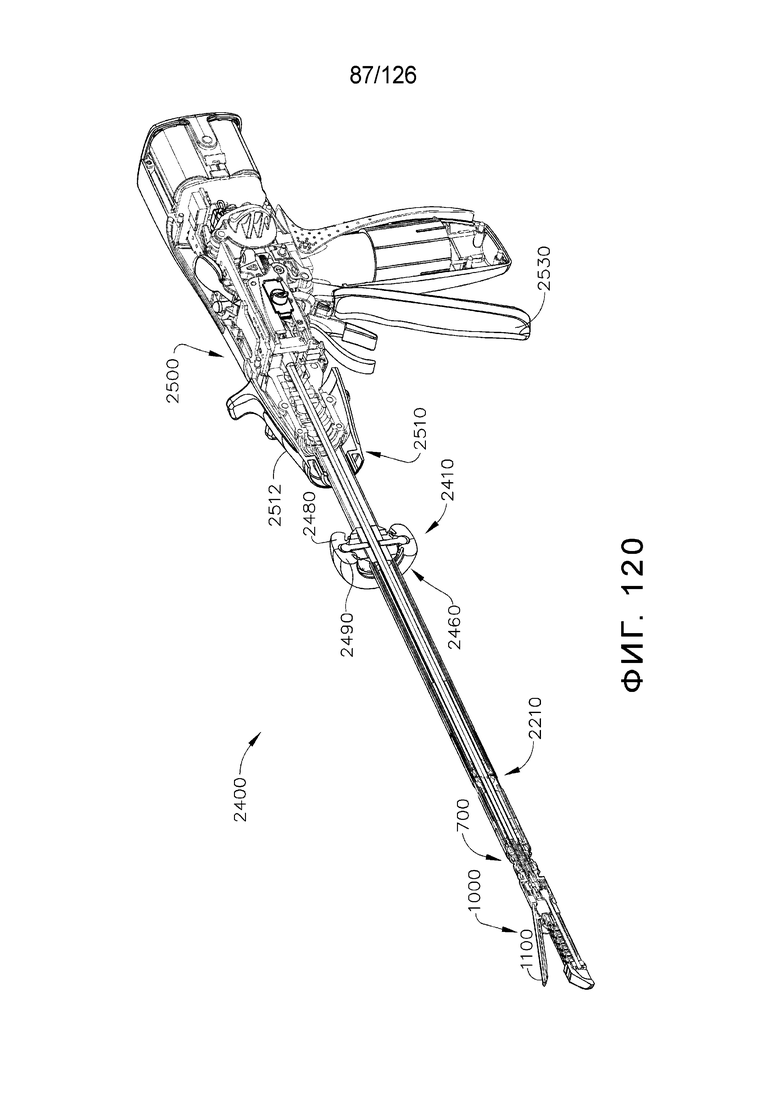
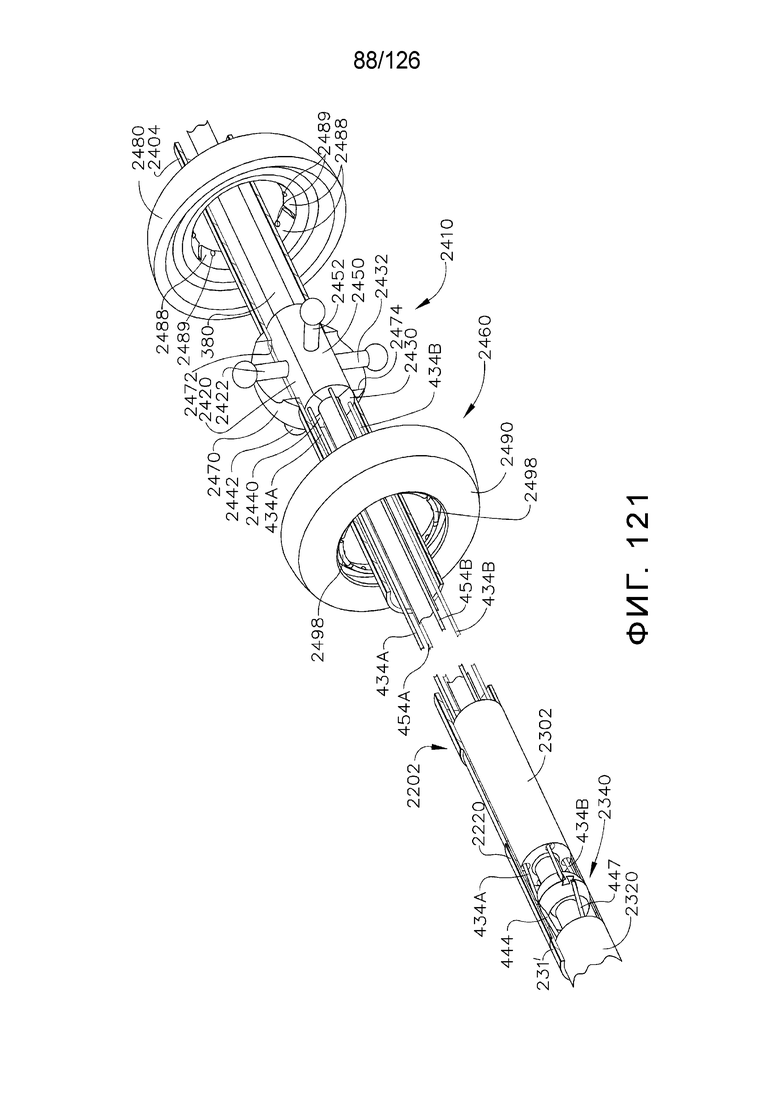
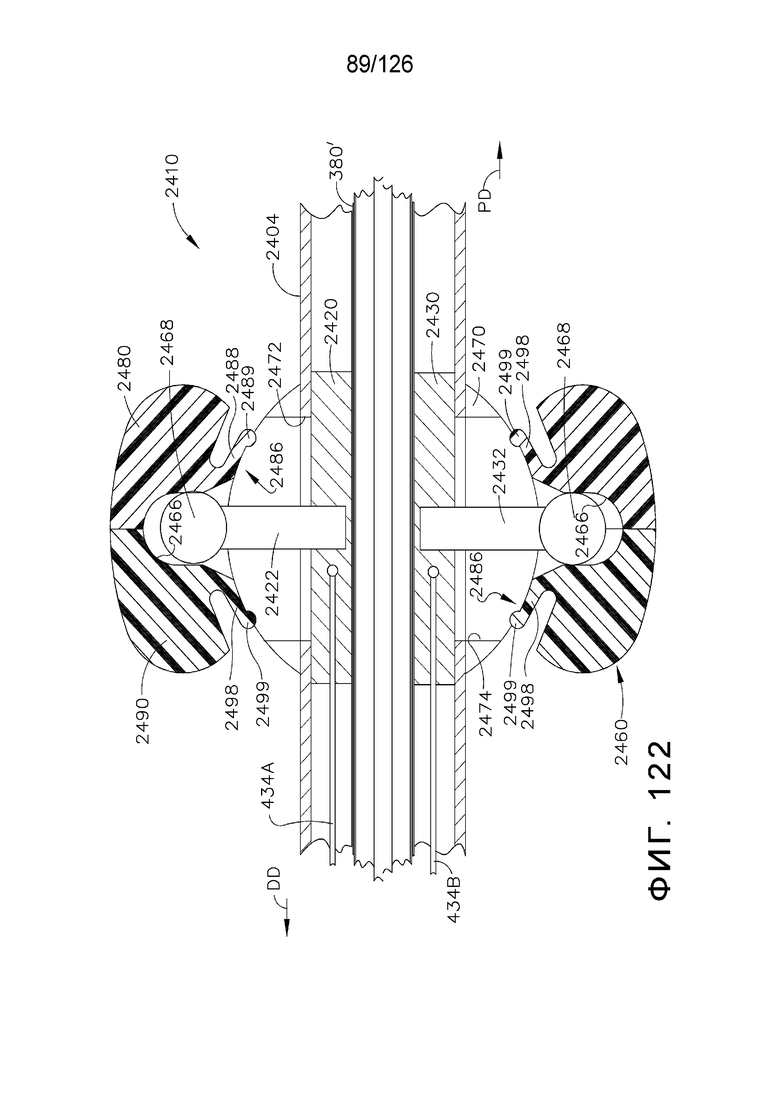
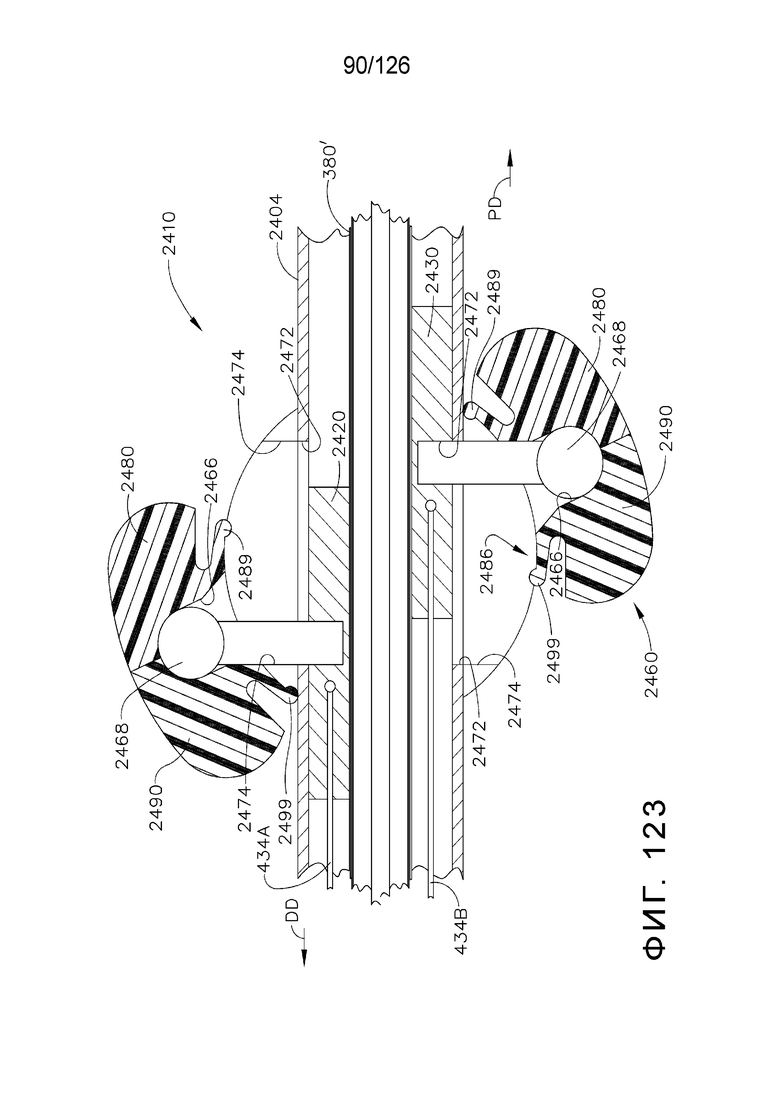
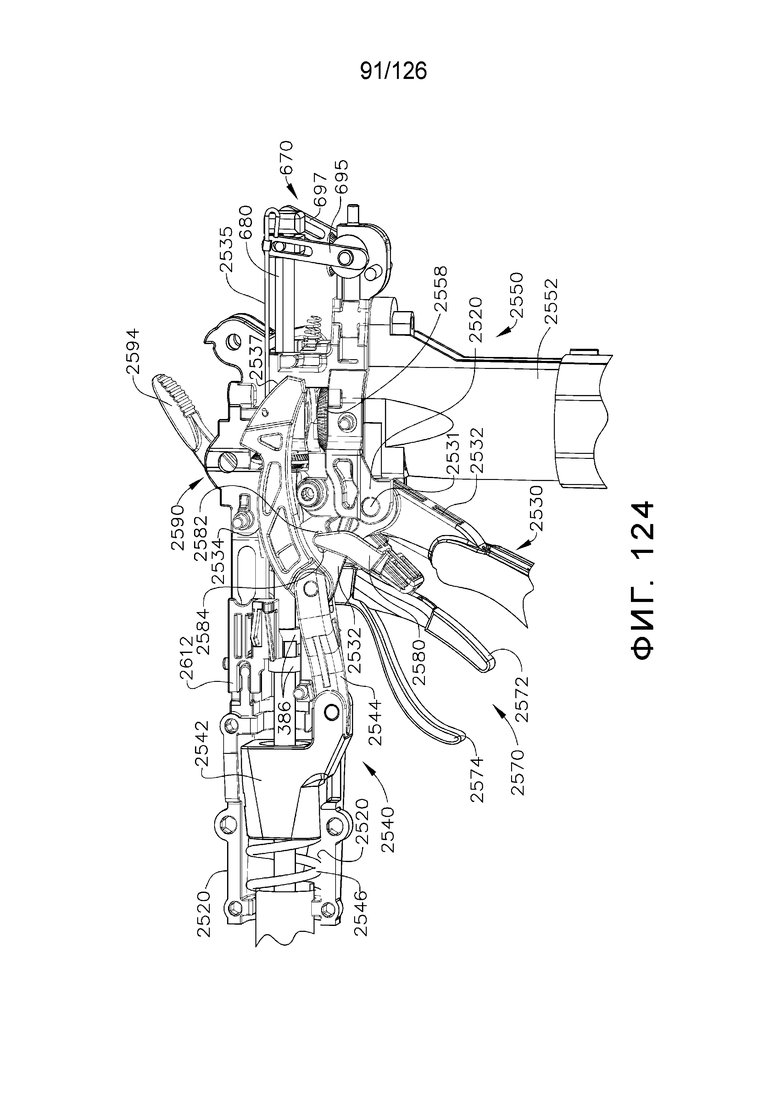
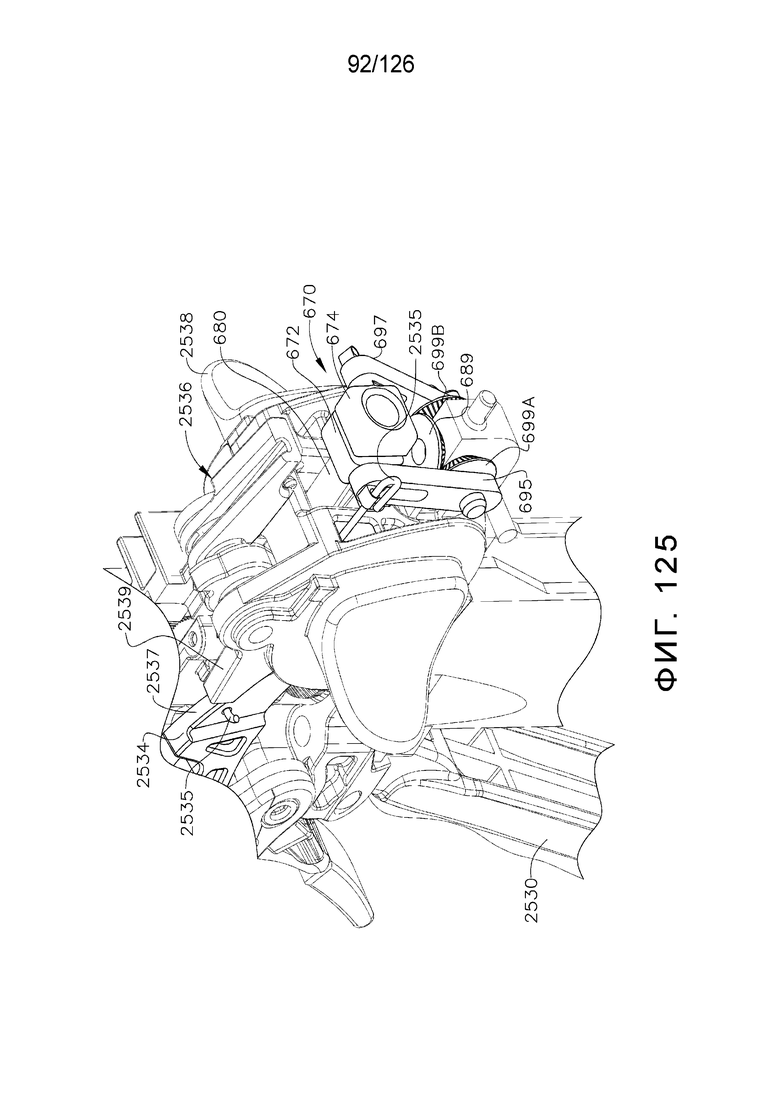
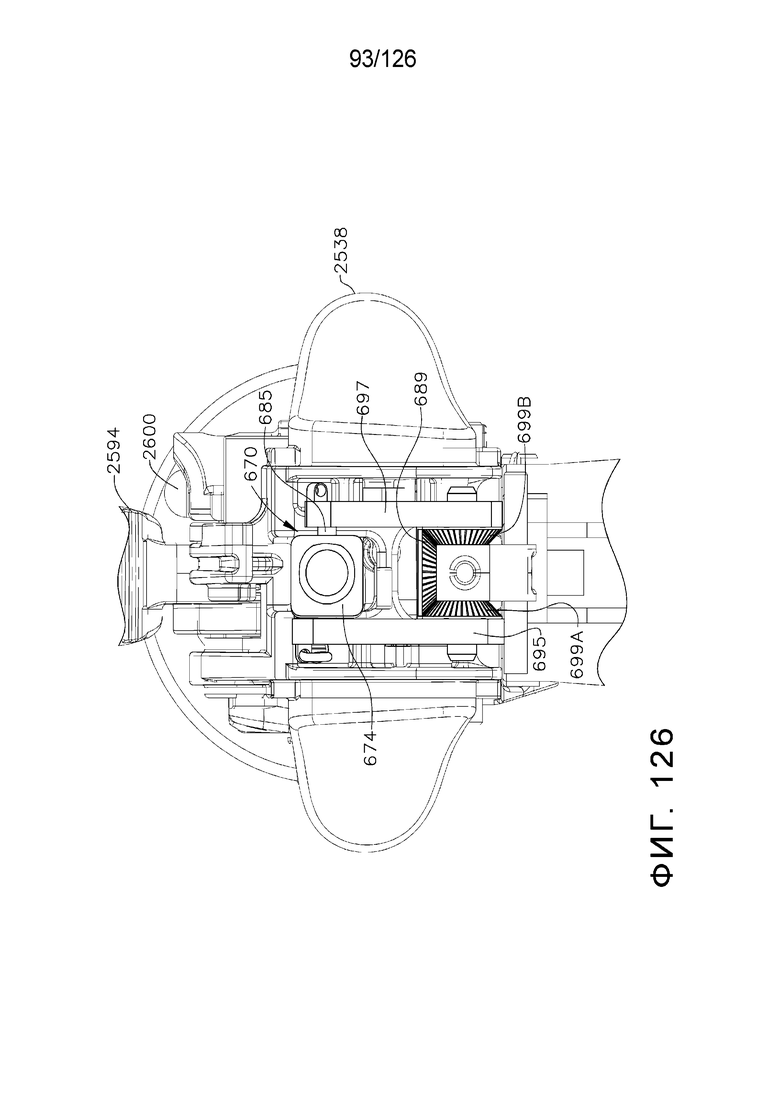
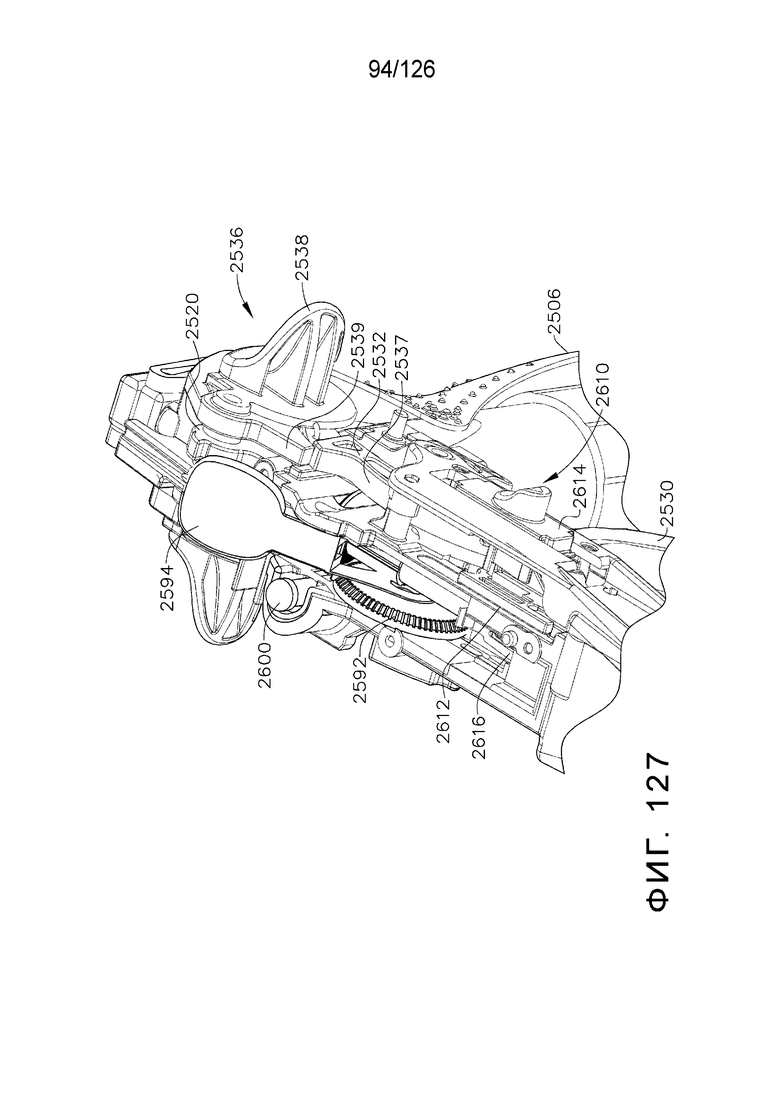
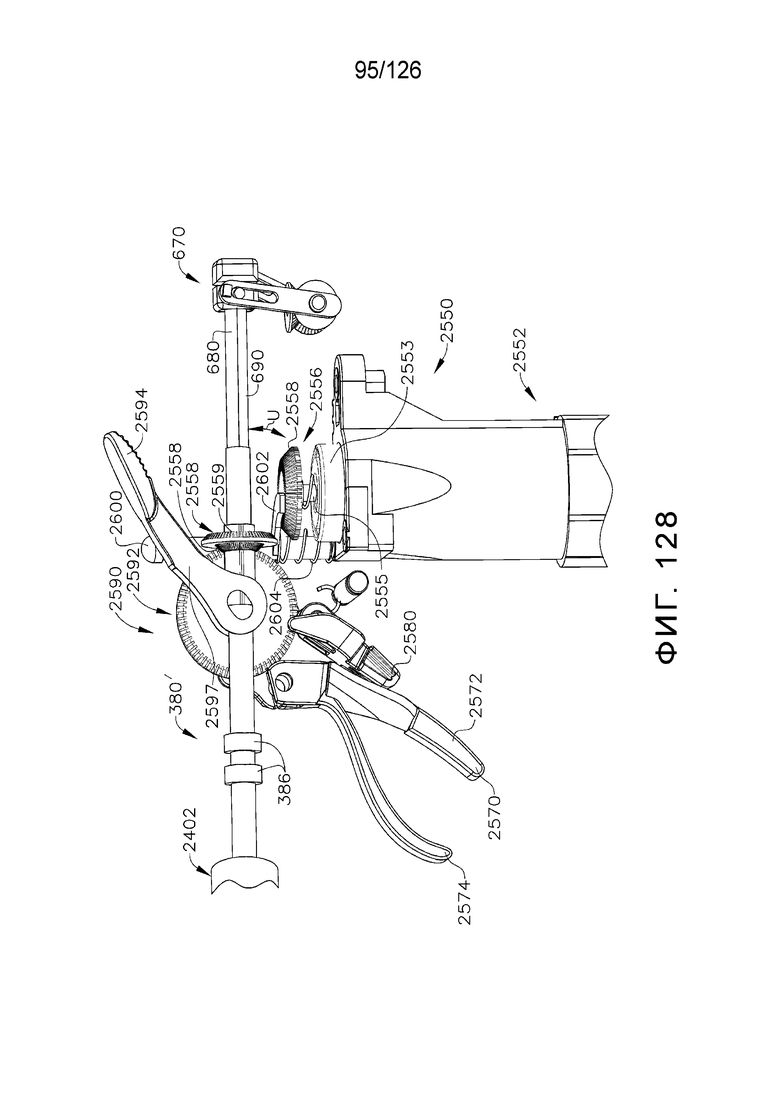

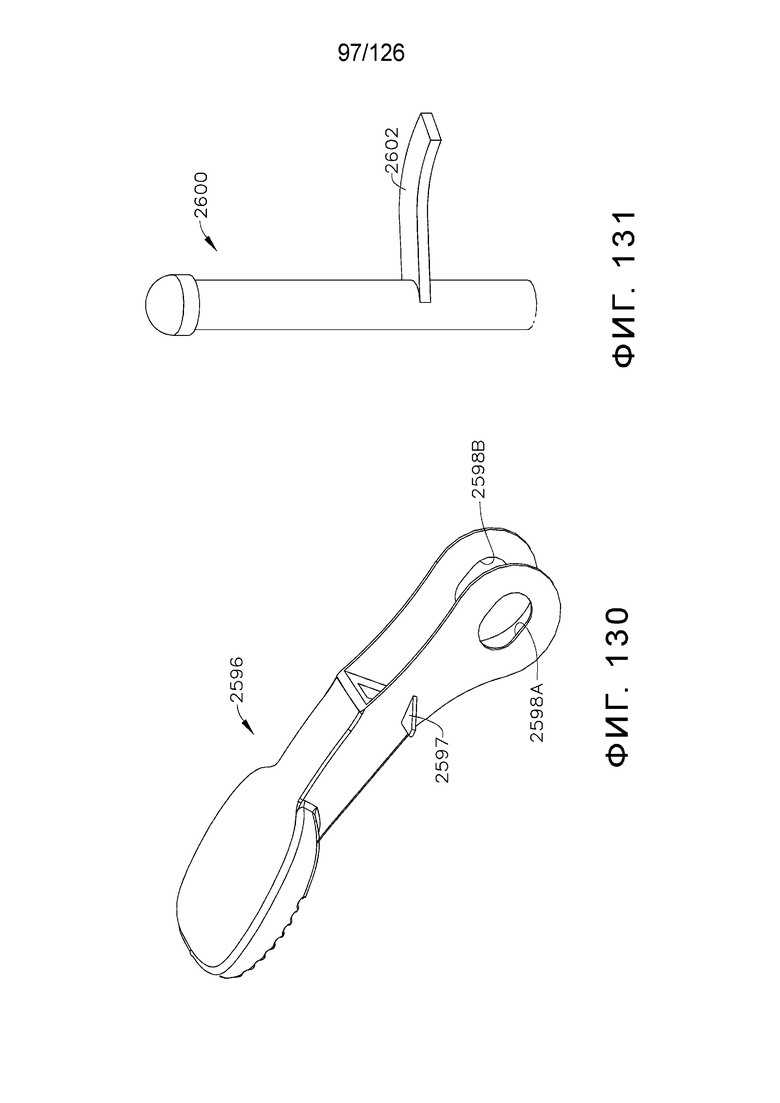
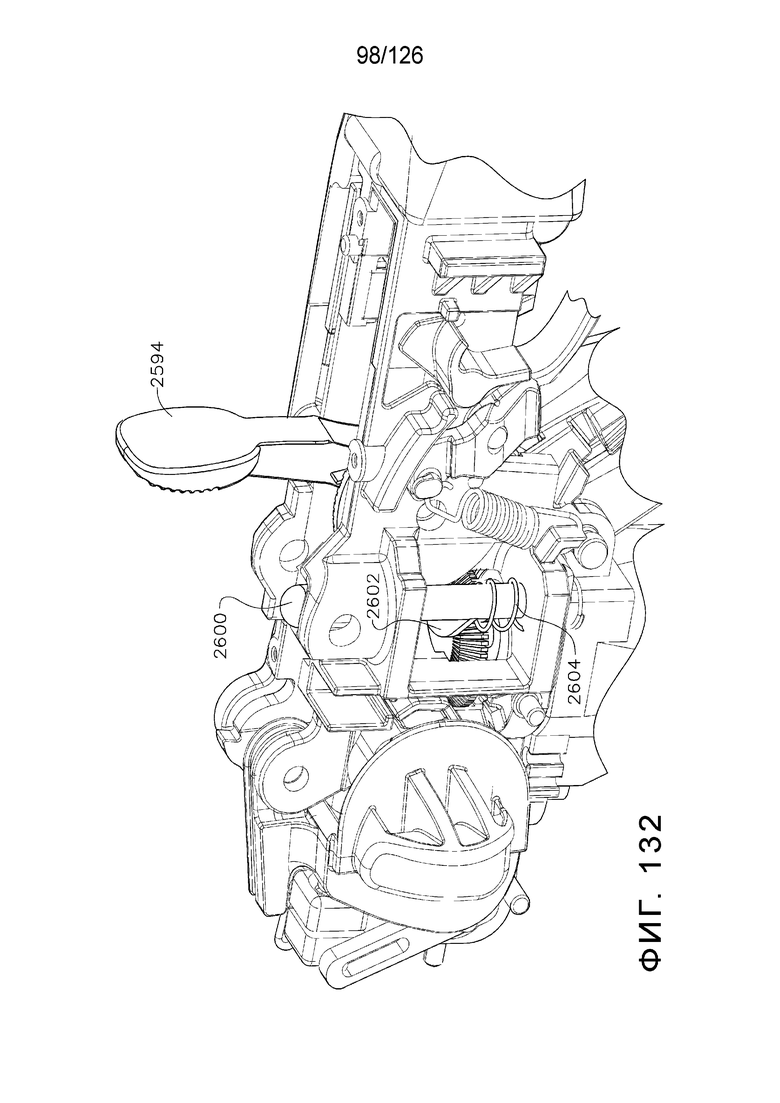
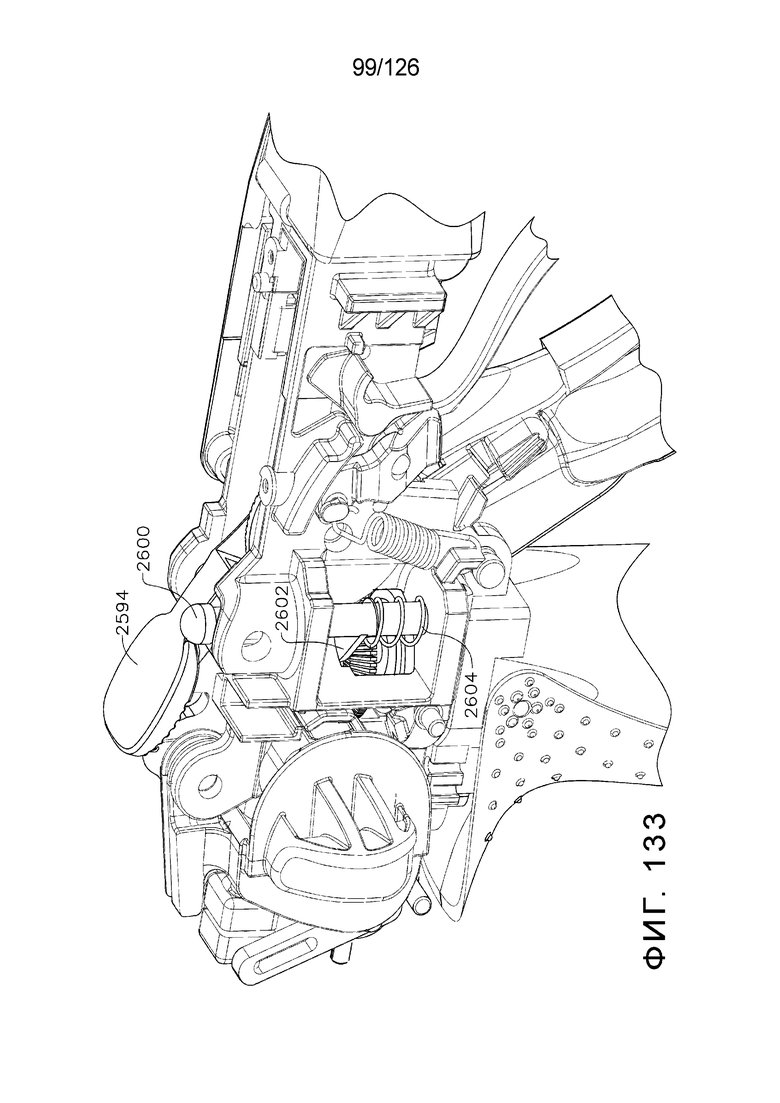
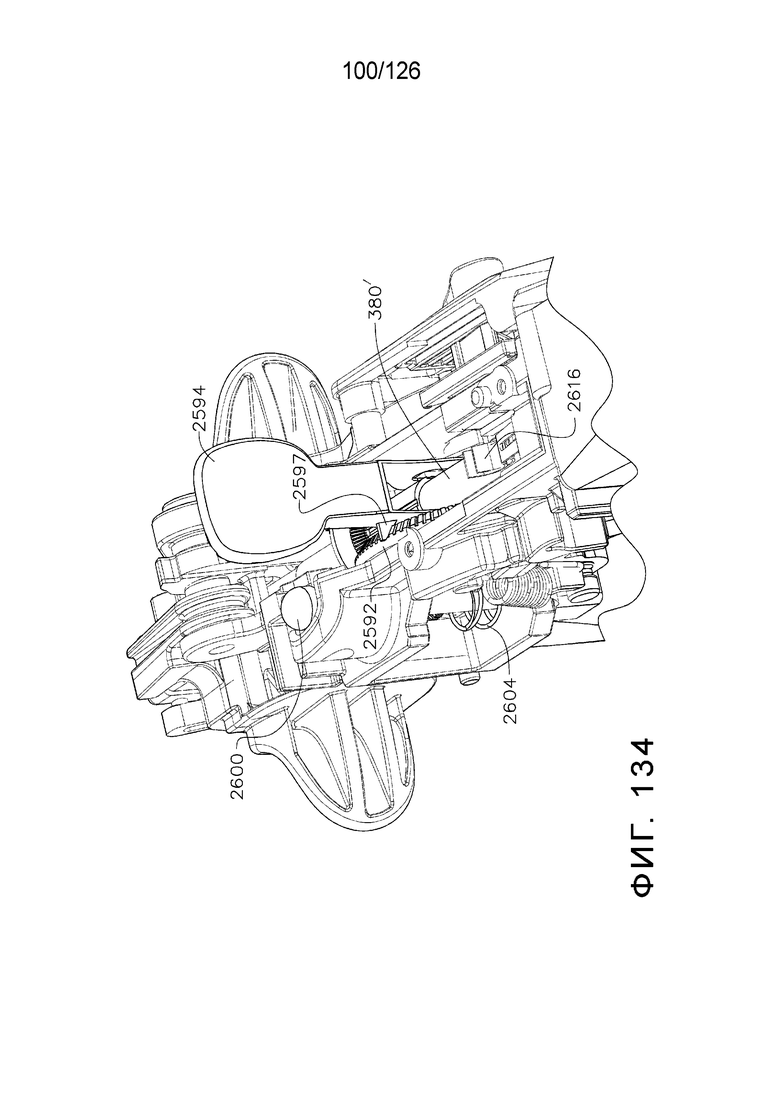
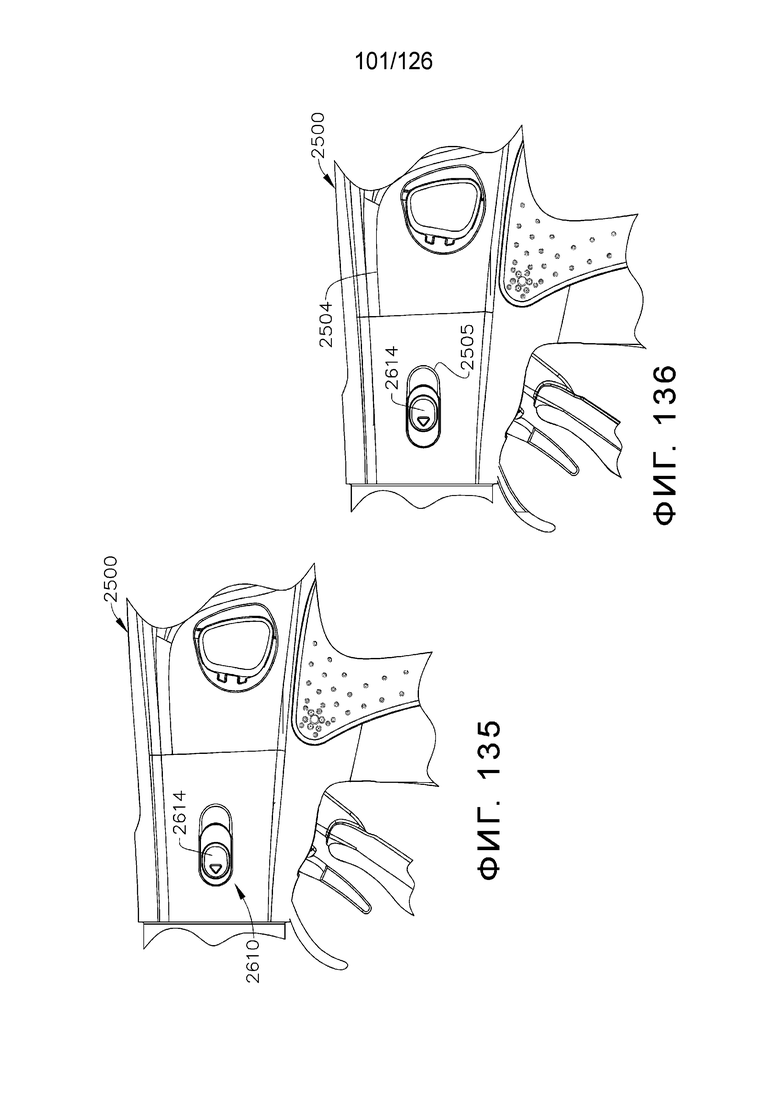
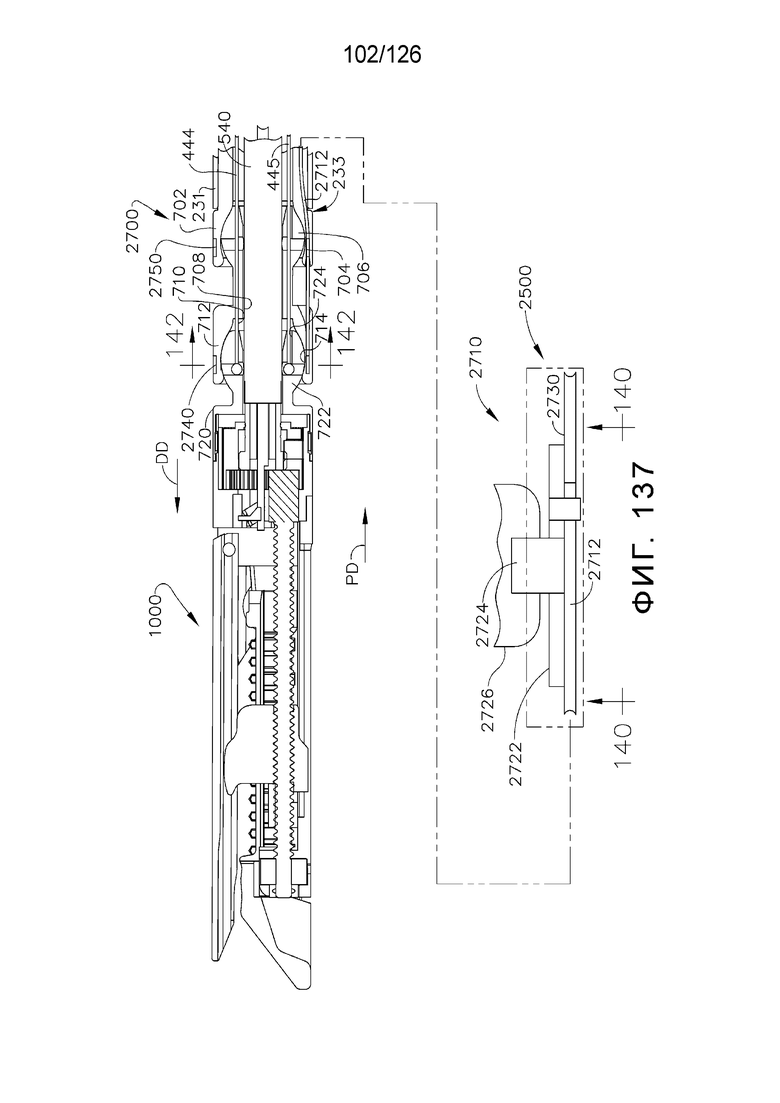
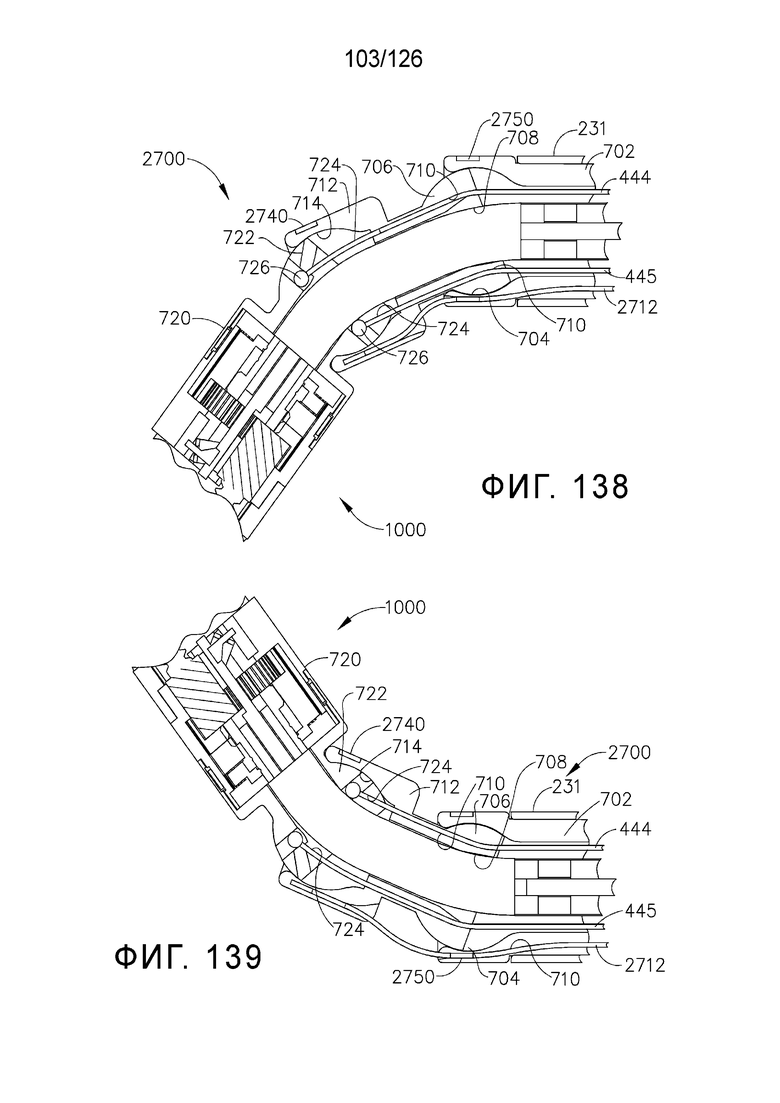

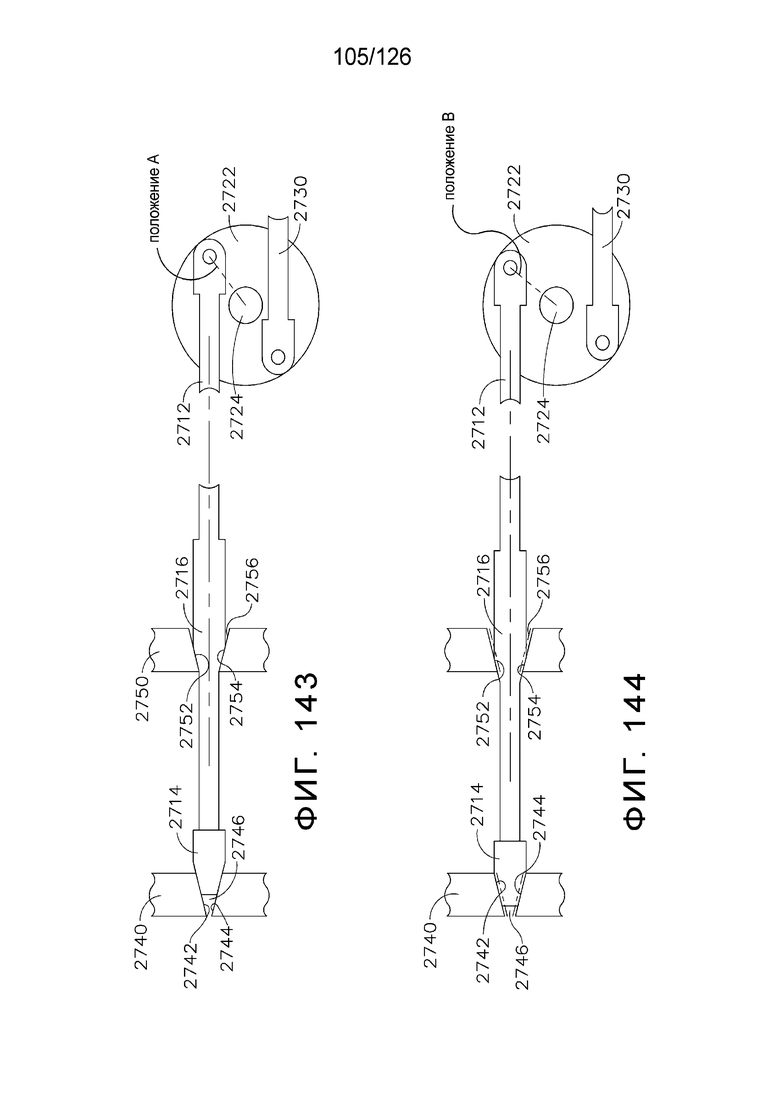

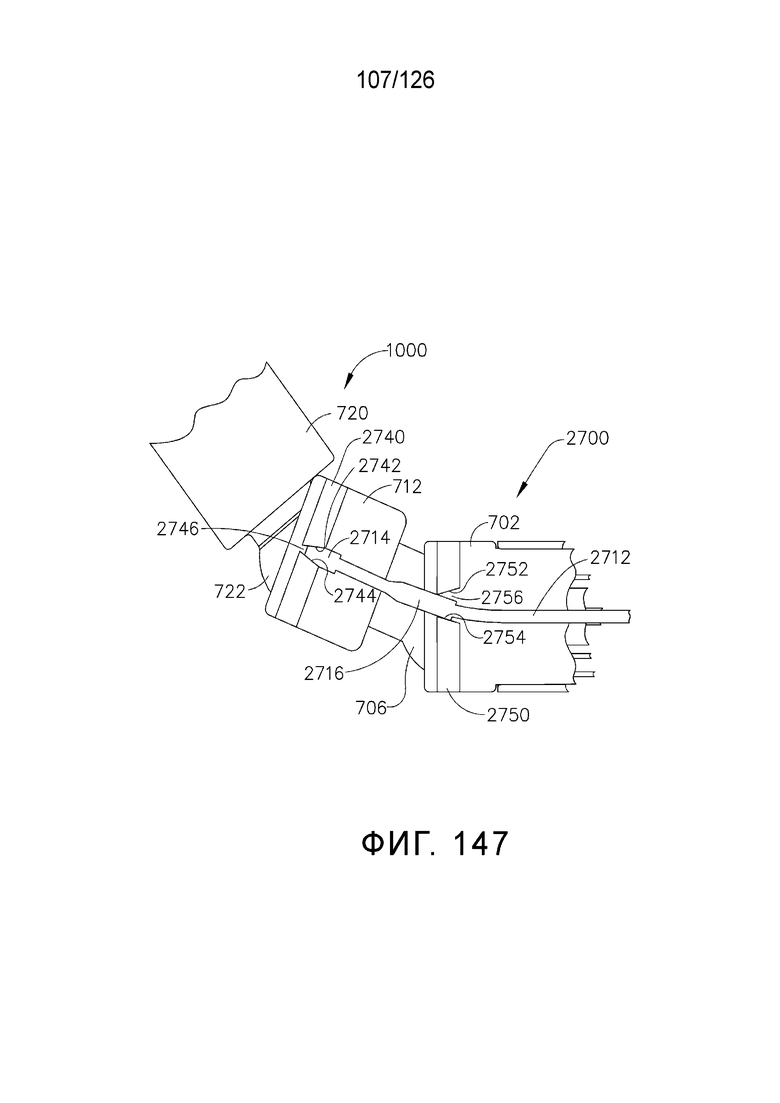
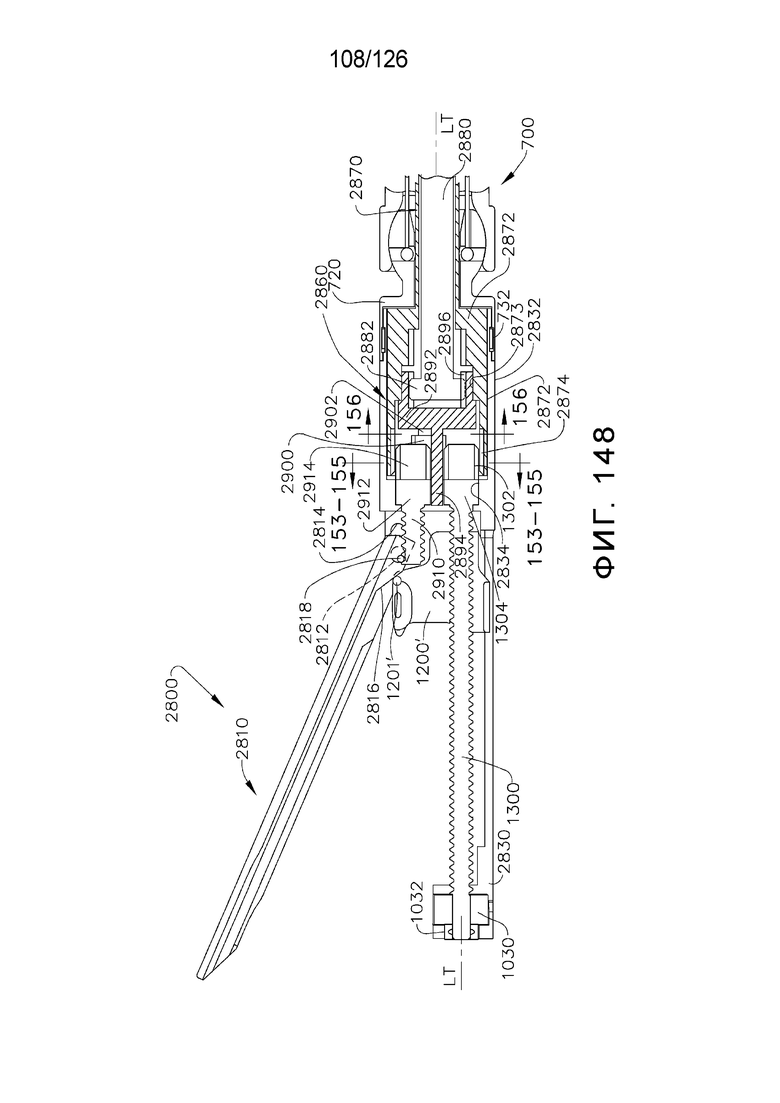
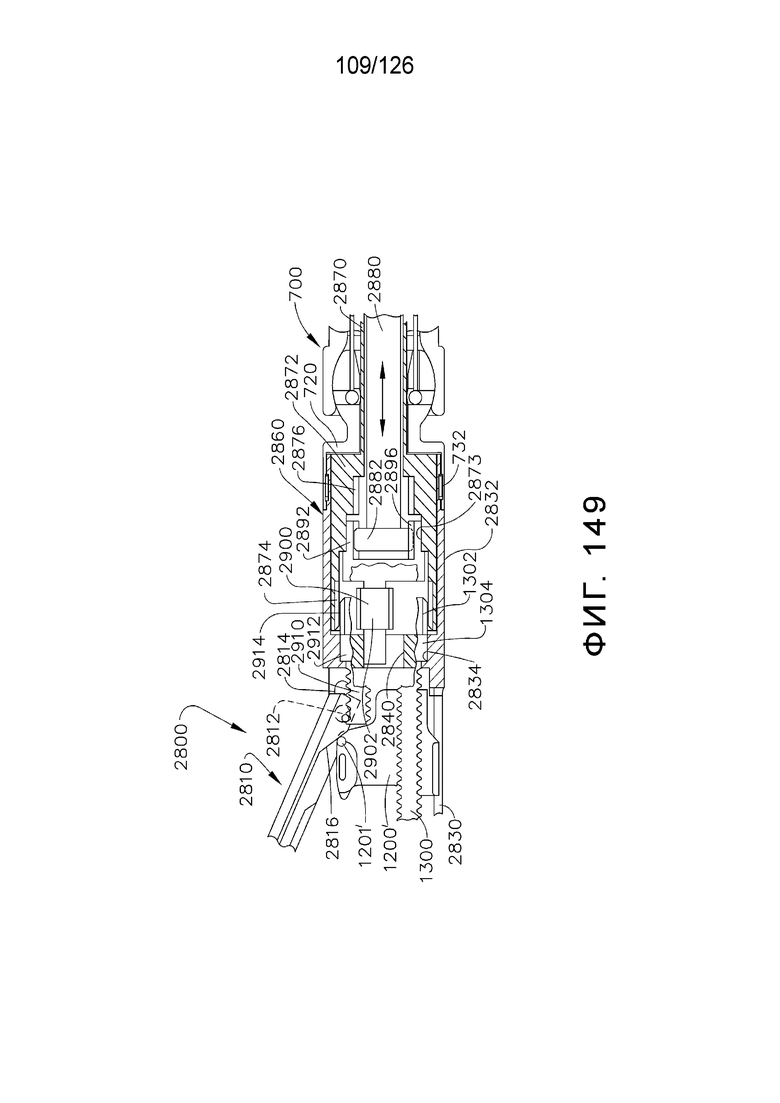

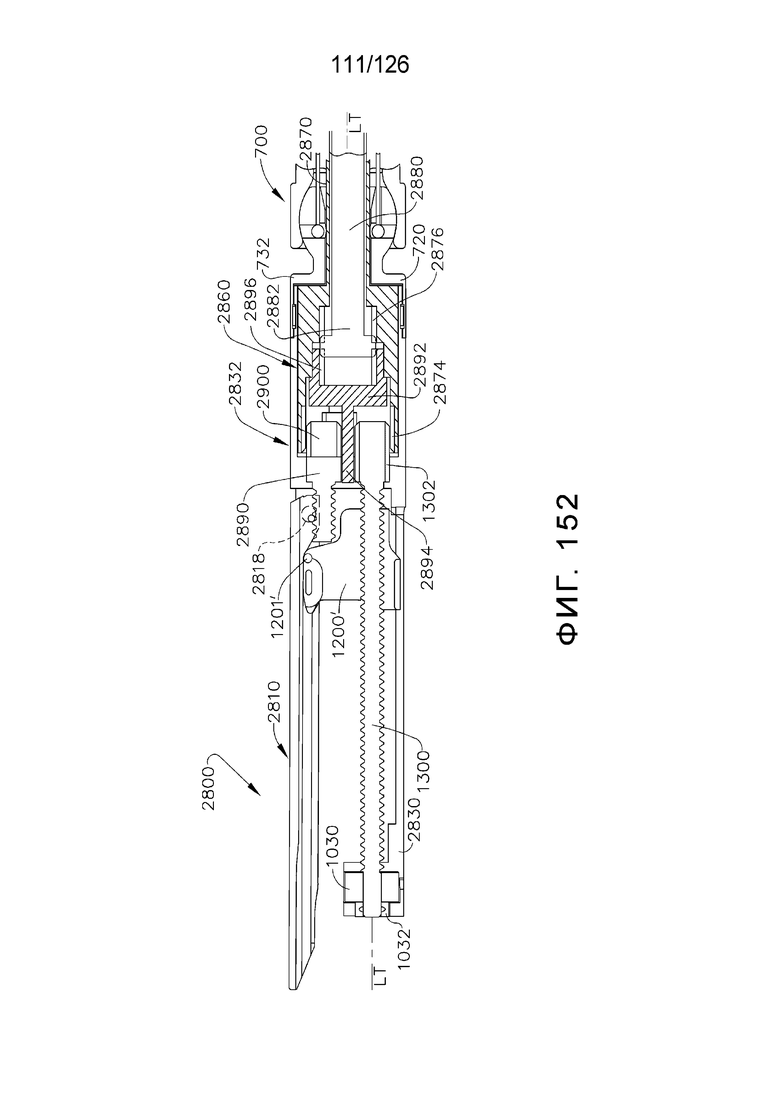
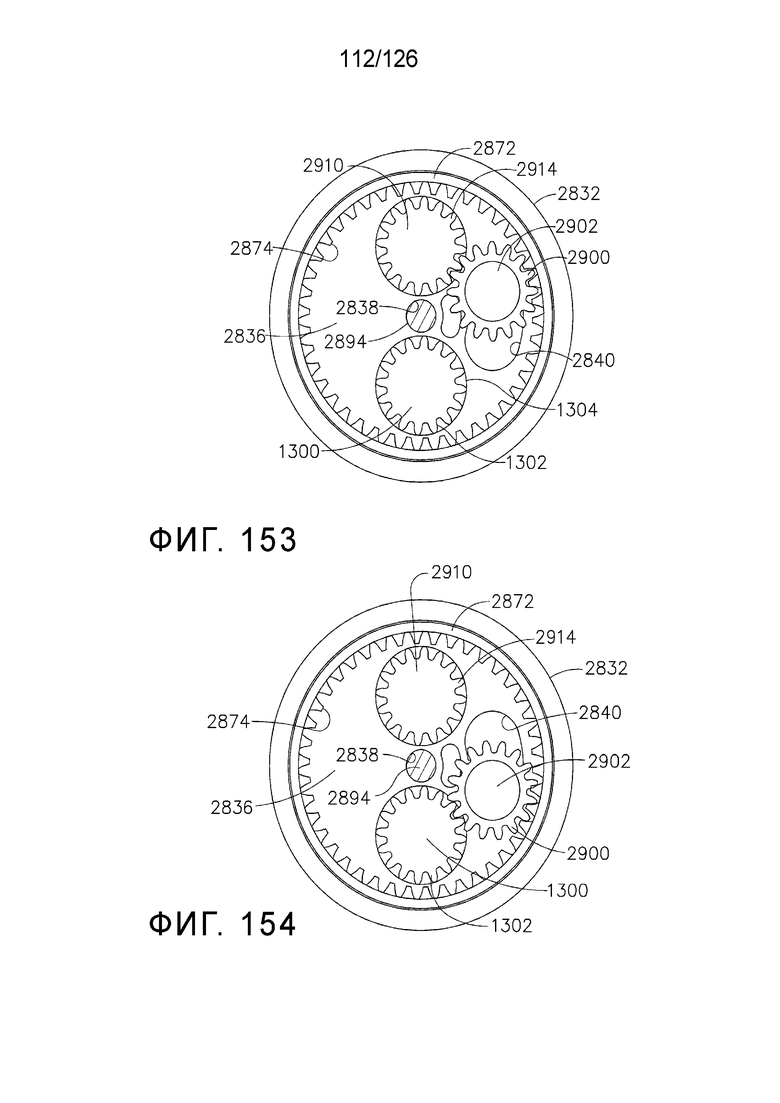
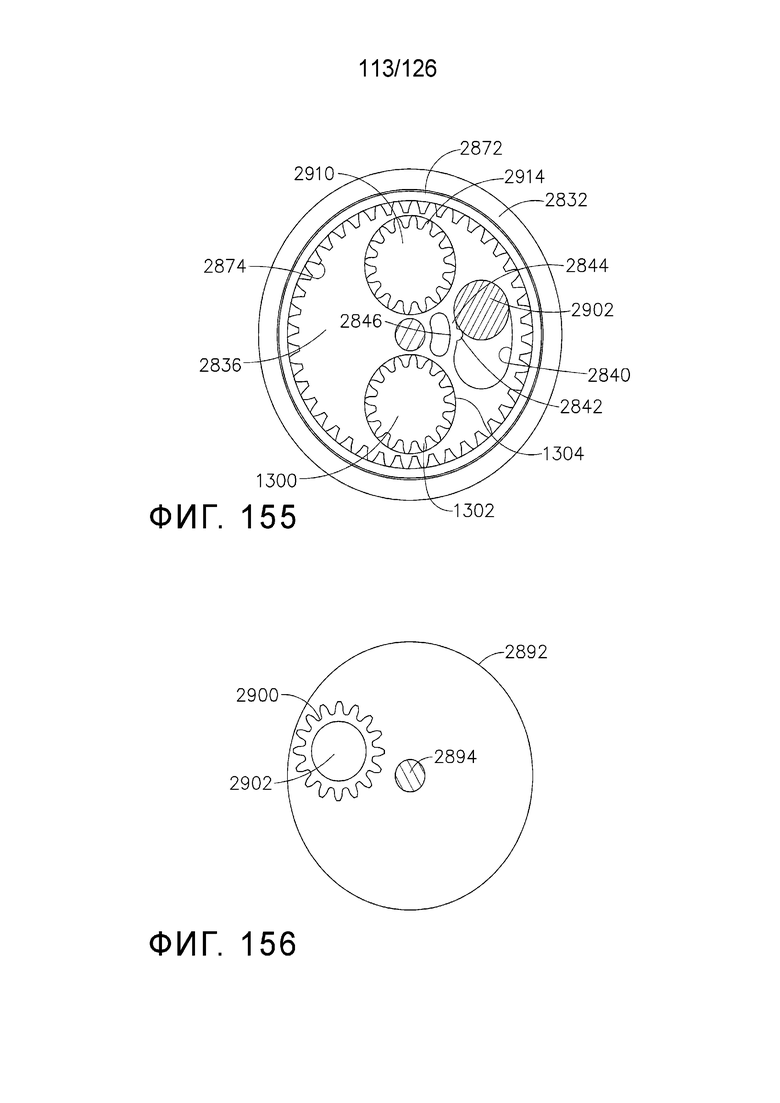
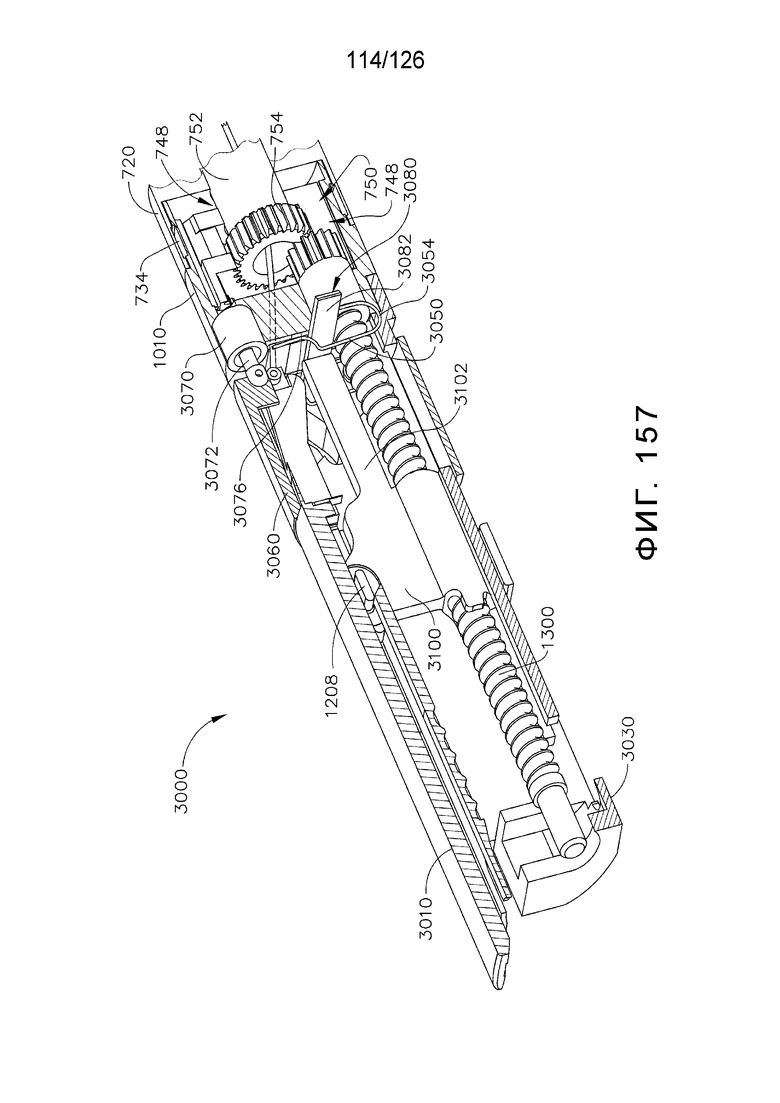
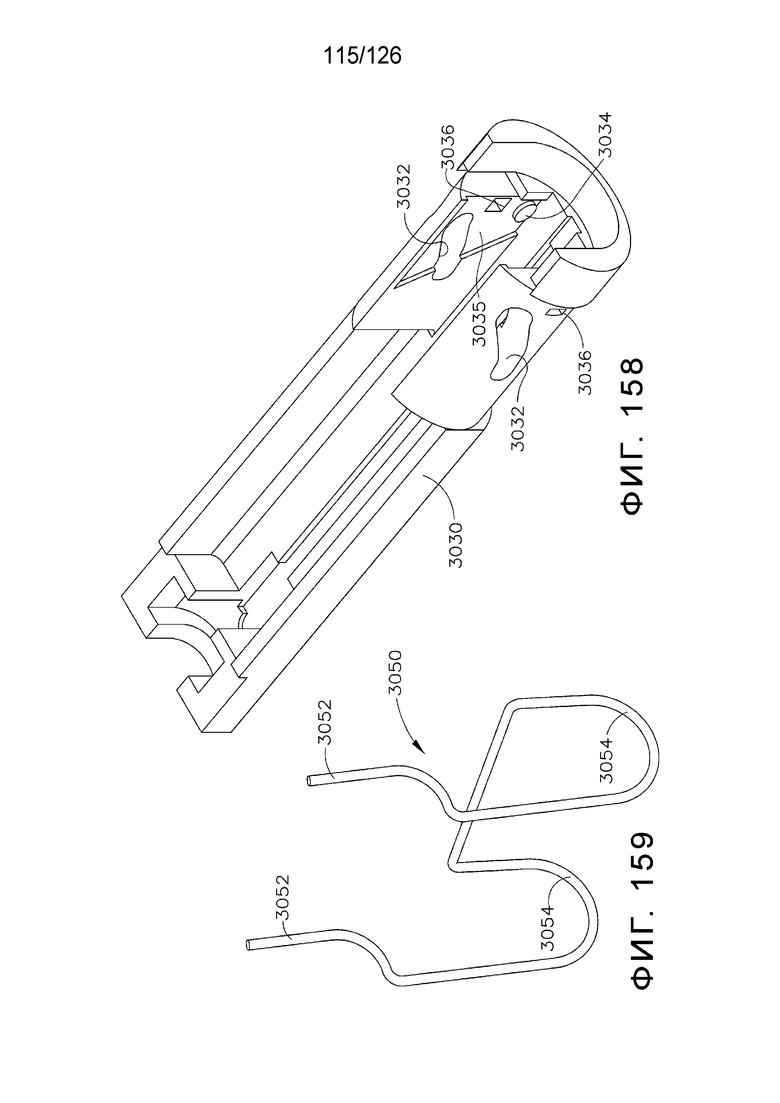
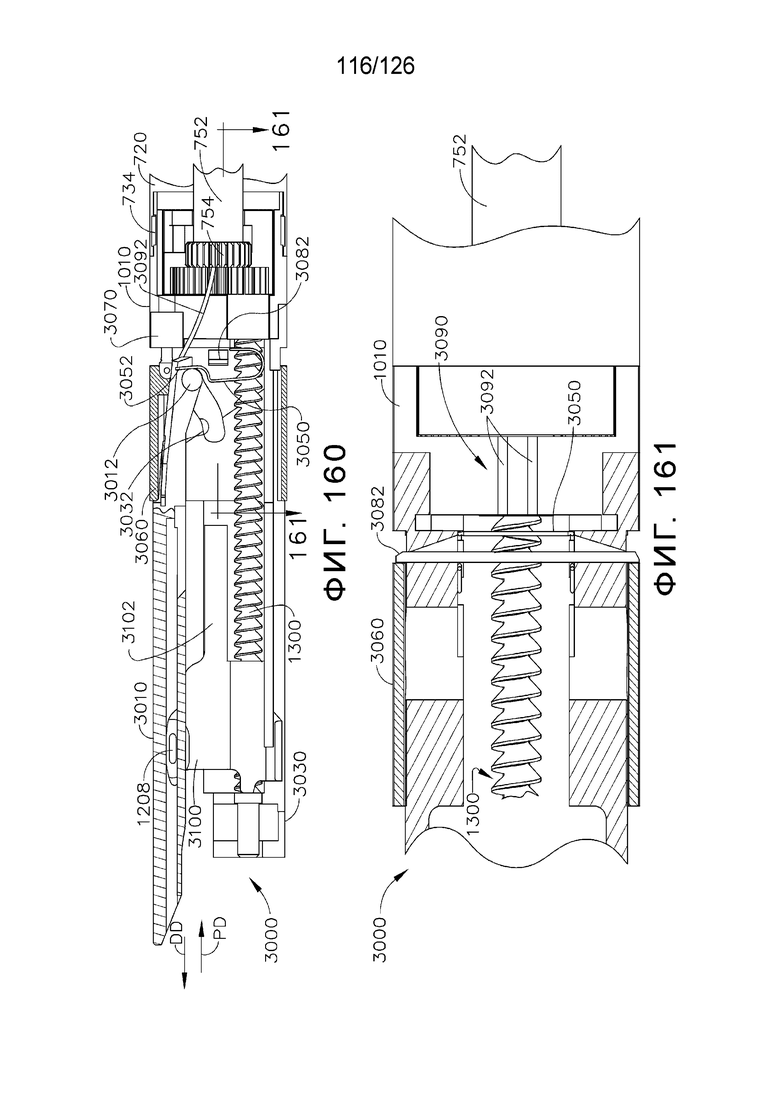
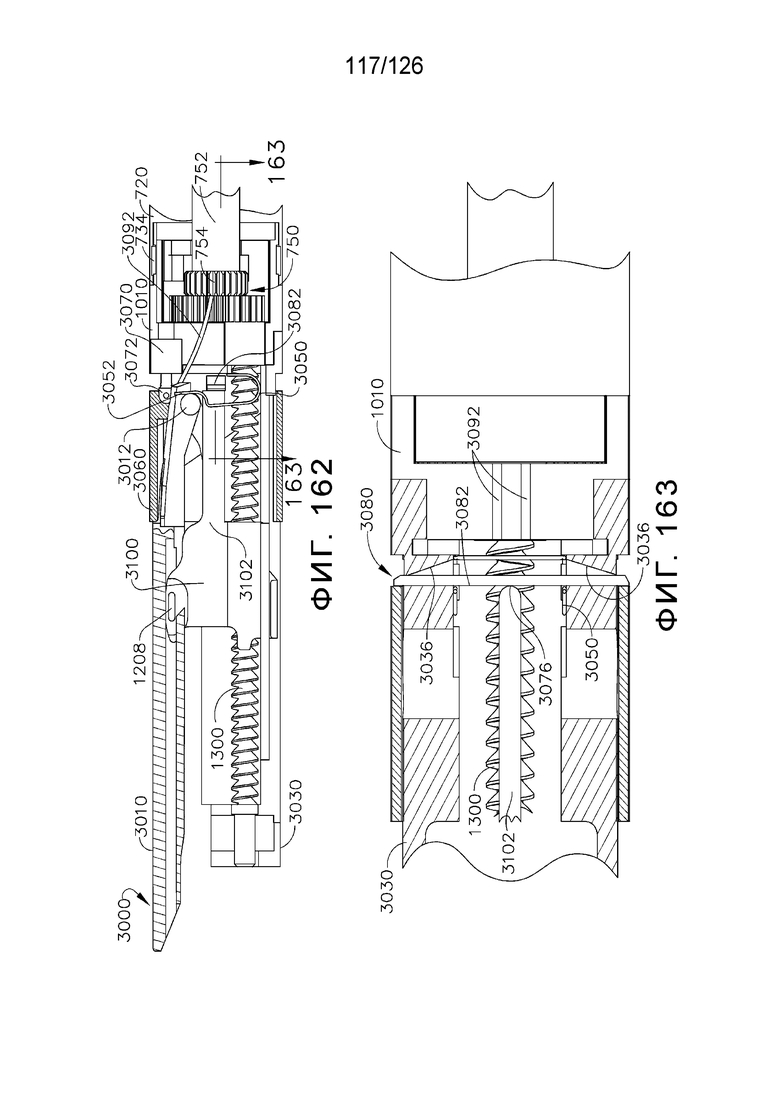
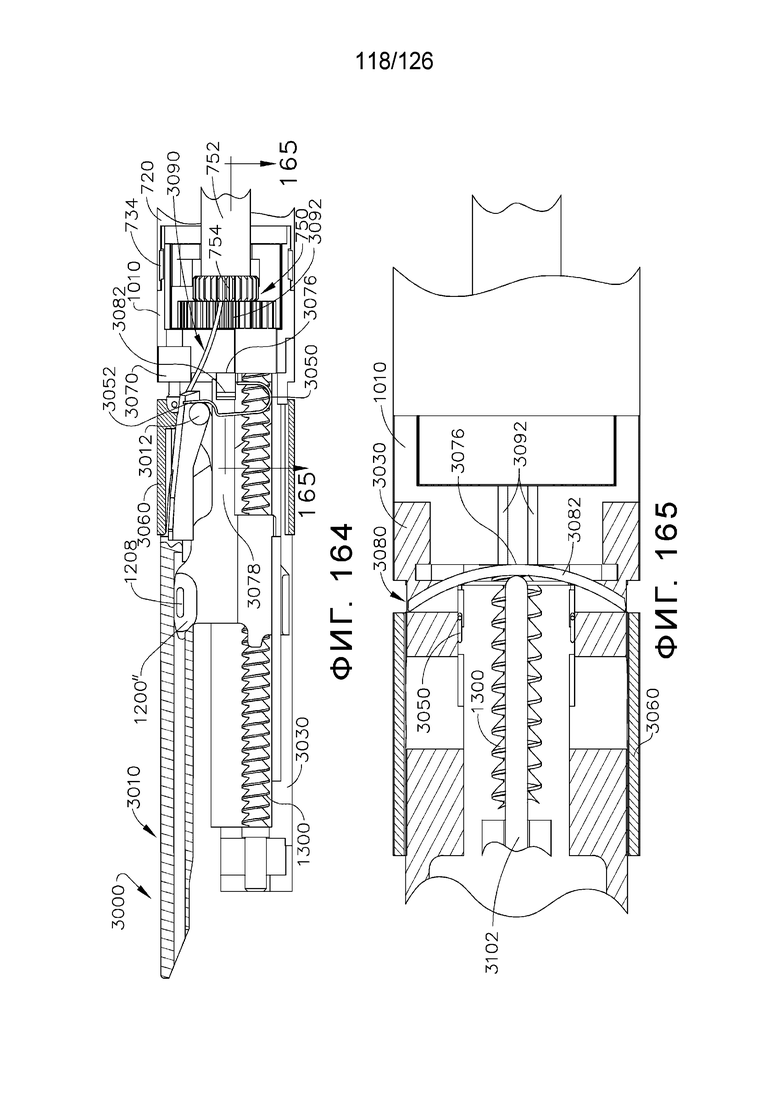
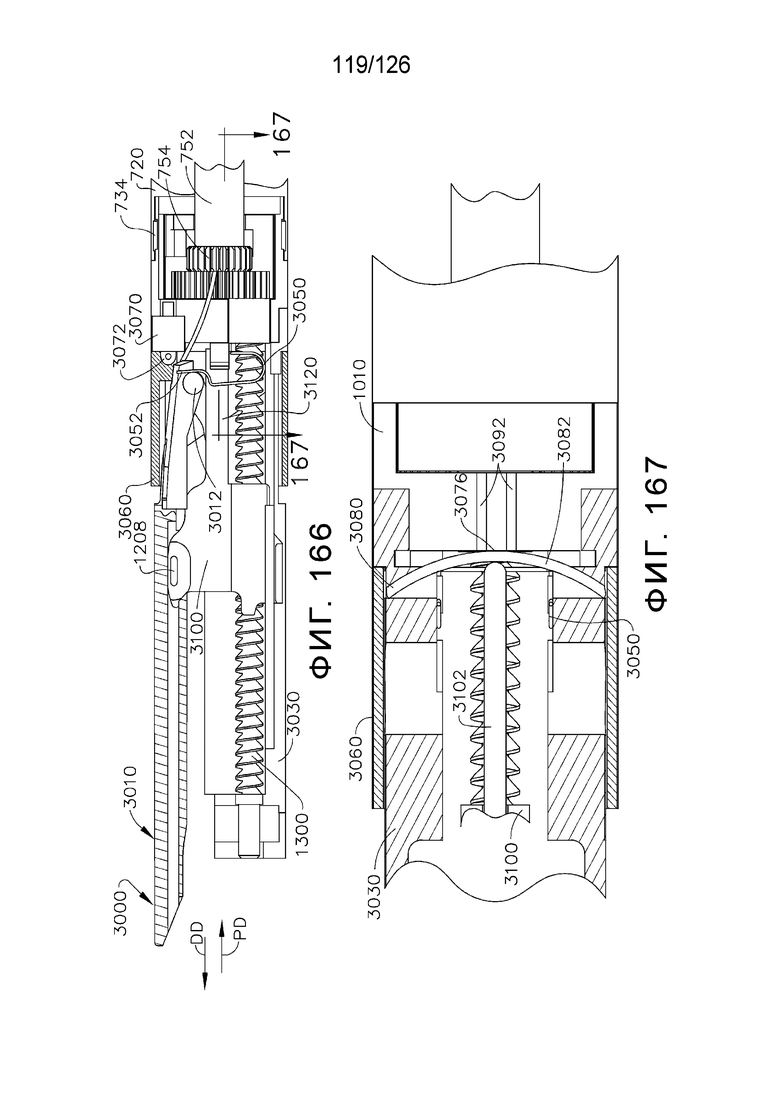
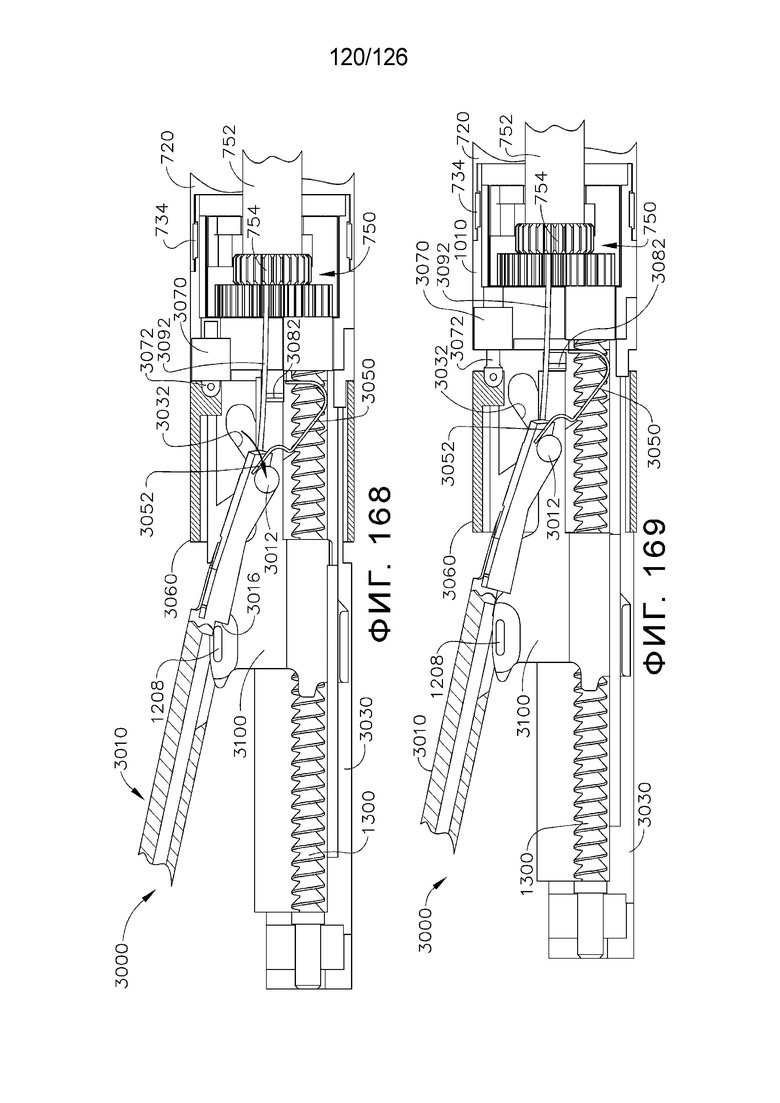
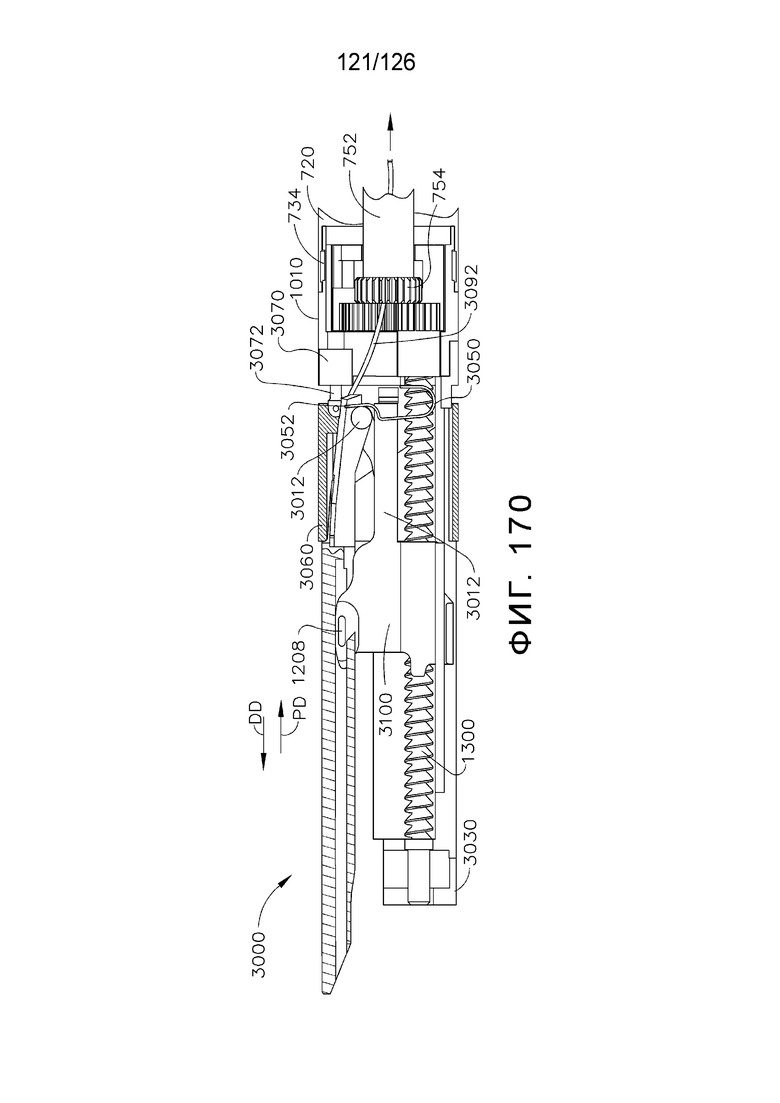

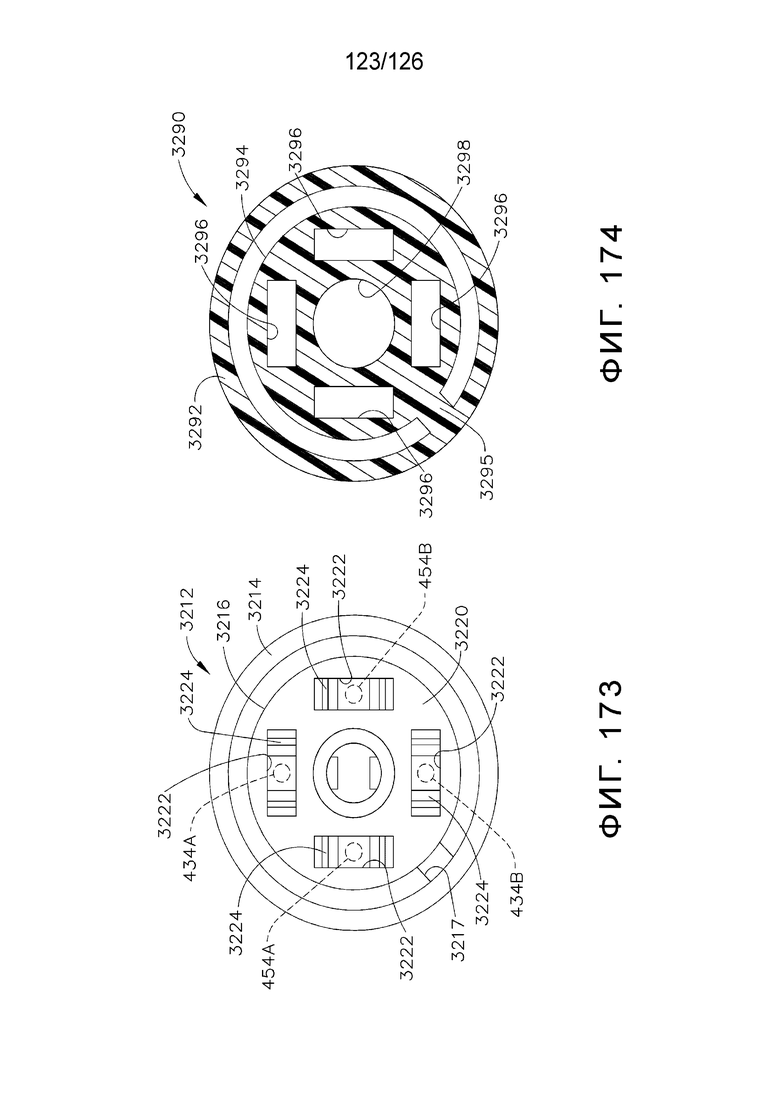
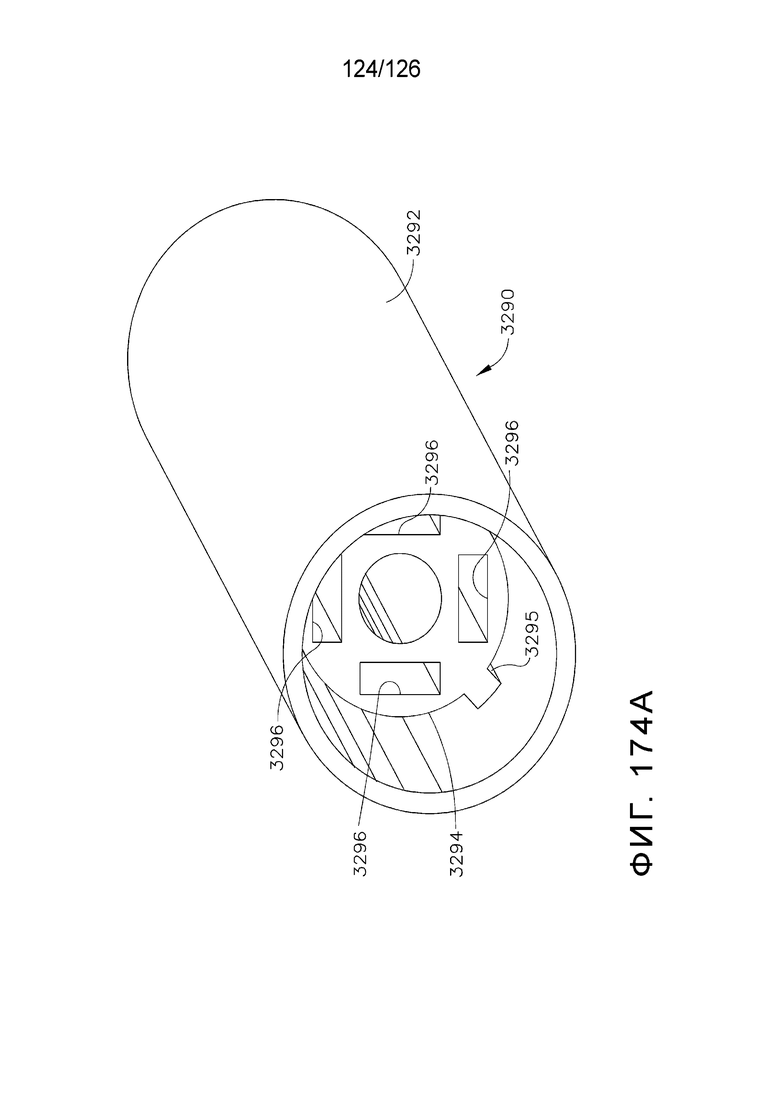
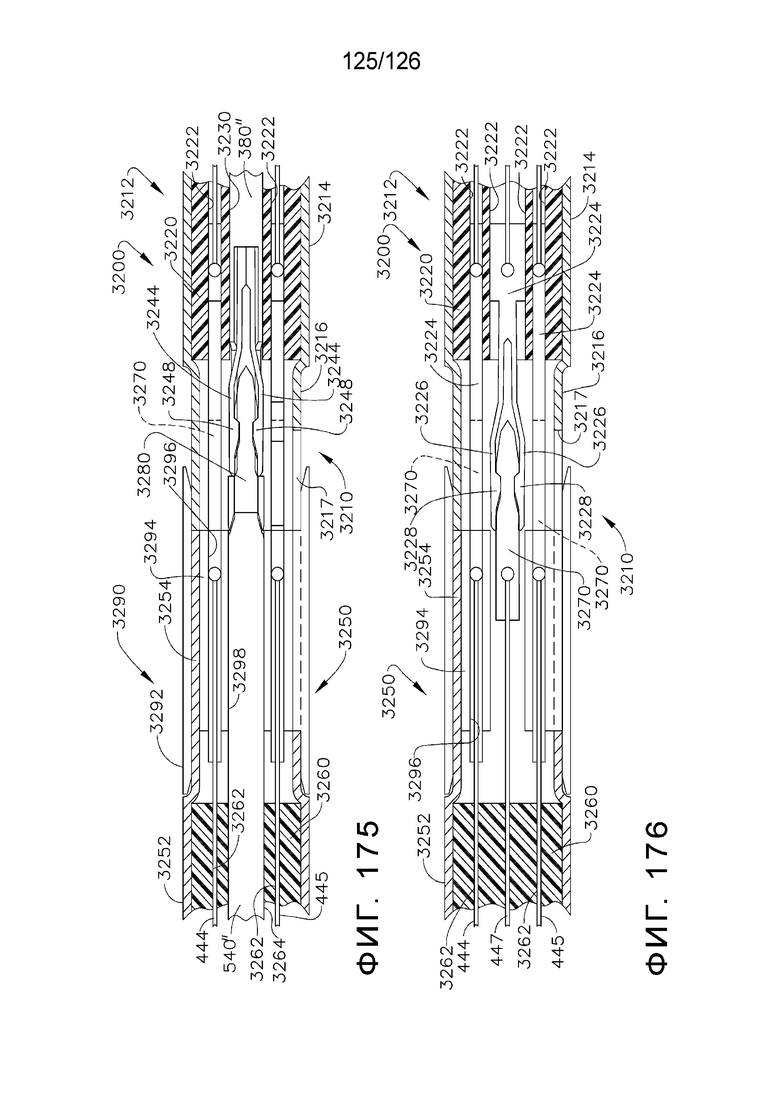
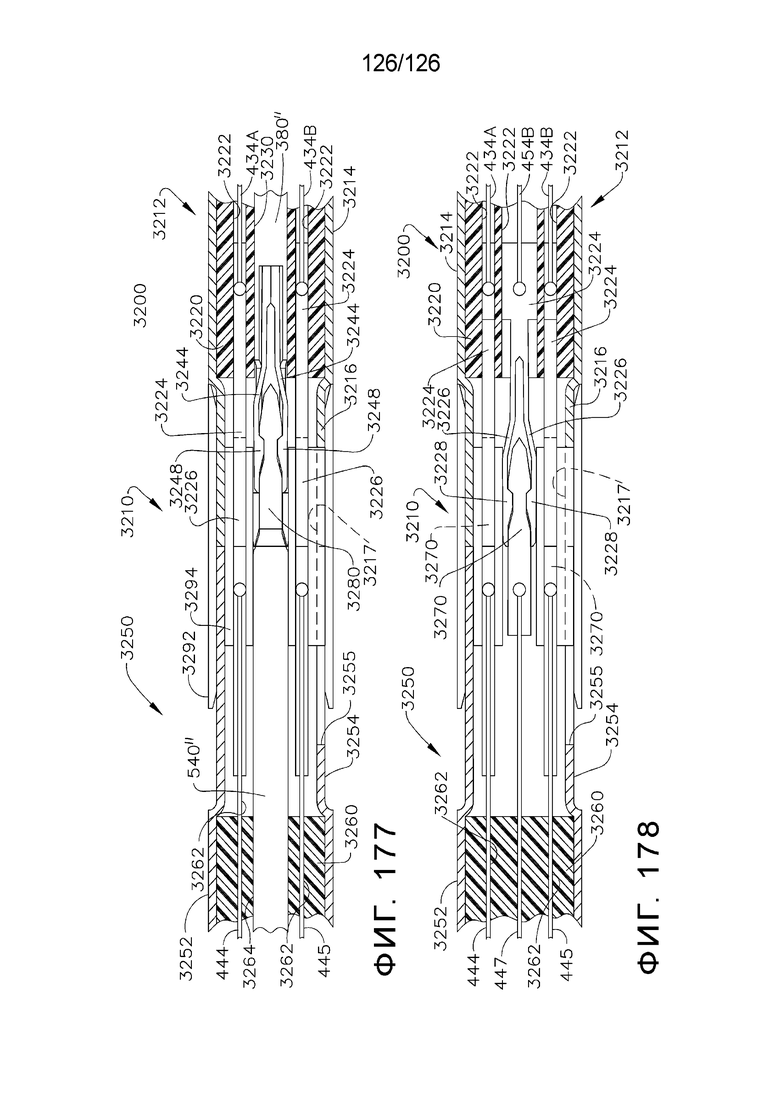
Группа изобретений относится к медицинской технике, а именно к хирургическому устройству с роботизированным приводом и активируемой вручную реверсирующей системой. Хирургический инструмент для применения с роботизированной системой, включающей в себя узел привода инструмента, функционально соединенный с блоком управления роботизированной системы, управление которым осуществляется по входным командам оператора, и который выполнен с возможностью роботизированно генерировать выходные движения, причем хирургический инструмент содержит приводную систему, узел приводного стержня и активируемую вручную систему управления. Приводная система выполнена с возможностью взаимодействия с соответствующей частью узла привода инструмента роботизированной системы для приема от нее роботизированно сгенерированных выходных движений. Узел приводного стержня функционально взаимодействует с приводной системой и выполнен с возможностью приема роботизированно сгенерированных выходных движений от приводной системы и сообщения управляющих движений хирургическому концевому эффектору, функционально взаимодействующему с узлом приводного стержня. Активируемая вручную система управления функционально взаимодействует с узлом приводного стержня для избирательного расцепления приводной системы от узла приводного стержня и для сообщения поворотных генерируемых вручную управляющих движений узлу приводного стержня. Во втором варианте выполнения вышеуказанный хирургический инструмент содержит хирургический концевой эффектор, узел удлиненного стержня, монтажную часть для инструмента и активируемую вручную реверсирующую систему. Хирургический концевой эффектор содержит по меньшей мере одну компонентную часть, выполненную с возможностью избирательного перемещения между первым и вторым положениями относительно по меньшей мере одной другой его компонентной части в ответ на сообщение управляющих движений составной части, выполненной с возможностью избирательного перемещения. Узел удлиненного стержня функционально соединен с хирургическим концевым эффектором. Узел удлиненного стержня содержит по меньшей мере одну часть, приводимую в движение шестернями, которая находится в функциональной связи по меньшей мере с одной компонентной частью хирургического концевого эффектора, выполненной с возможностью избирательного перемещения. Монтажная часть для инструмента функционально соединена с узлом удлиненного стержня. Монтажная часть для инструмента выполнена с возможностью функционального взаимодействия с узлом привода инструмента при соединении с ним. Монтажная часть для инструмента содержит ведомый элемент и приводную систему. Ведомый элемент поддерживается с возможностью поворота на монтажной части для инструмента и выполнен с возможностью приводного зацепления с соответствующей одной из по меньшей мере одной поворачиваемой корпусной части узла привода инструмента для приема от нее соответствующих поворотных выходных движений. Приводная система в функциональном зацеплении с по меньшей мере одной частью, приводимой в движение шестернями, для сообщения ему роботизированно сгенерированных пусковых движений, в результате чего соответствующая одна из по меньшей мере одной части, приводимой в движение шестернями, сообщает по меньшей мере одно управляющее движение компоненту, выполненному с возможностью избирательного перемещения. Активируемая вручную реверсирующая система функционально взаимодействует с узлом удлиненного стержня для избирательного расцепления приводной системы от по меньшей мере одной части, приводимой в движение шестернями, и для сообщения генерируемых вручную поворотных управляющих движений этой по меньшей мере одной части, приводимой в движение шестернями. В третьем варианте выполнения вышеуказанный хирургический инструмент содержит поворотную приводную систему, узел поворотного приводного стержня и активируемую вручную реверсирующую систему. Поворотная приводная система выполнена с возможностью взаимодействия с соответствующей частью узла привода инструмента роботизированной системы для приема от нее роботизированно сгенерированных поворотных выходных движений. Узел поворотного приводного стержня функционально взаимодействует с поворотной приводной системой и выполнен с возможностью приема роботизированно сгенерированных поворотных выходных движений от поворотной приводной системы и сообщения поворотных приводных движений хирургическому концевому эффектору, функционально взаимодействующему с узлом поворотного приводного стержня. Активируемая вручную реверсирующая система функционально взаимодействует с узлом поворотного приводного стержня для избирательного расцепления приводной системы от узла поворотного приводного стержня и для сообщения генерируемых вручную поворотных приводных движений узлу поворотного приводного стержня. Использование группы изобретений позволит развить диапазон усилий, необходимых для эффективного разрезания и сшивания ткани. 3 н. и 17 з.п. ф-лы, 178 ил.
1. Хирургический инструмент для применения с роботизированной системой, включающей в себя узел привода инструмента, функционально соединенный с блоком управления роботизированной системы, управление которым осуществляется по входным командам оператора, и который выполнен с возможностью роботизированно генерировать выходные движения, причем указанный хирургический инструмент содержит:
приводную систему, выполненную с возможностью взаимодействия с соответствующей частью узла привода инструмента роботизированной системы для приема от нее роботизированно сгенерированных выходных движений;
узел приводного стержня, функционально взаимодействующий с приводной системой и выполненный с возможностью приема роботизированно сгенерированных выходных движений от приводной системы и сообщения управляющих движений хирургическому концевому эффектору, функционально взаимодействующему с узлом приводного стержня, и
активируемую вручную систему управления, функционально взаимодействующую с узлом приводного стержня для избирательного расцепления приводной системы от узла приводного стержня и для сообщения поворотных генерируемых вручную управляющих движений узлу приводного стержня.
2. Хирургический инструмент по п. 1, в котором приводная система выполнена с возможностью передачи первого из роботизированно сгенерированных выходных движений на узел приводного стержня, чтобы узел приводного стержня сообщал первое из управляющих движений в первом направлении, причем приводная система дополнительно выполнена с возможностью передачи второго из роботизированно сгенерированных выходных движений на узел приводного стержня, чтобы узел приводного стержня сообщал второе из управляющих движений во втором направлении, противоположном первому направлению, и причем генерируемые вручную управляющие движения сообщаются узлу приводного стержня во втором направлении.
3. Хирургический инструмент по п. 1, в котором приводная система выполнена с возможностью функционального взаимодействия с соответствующей поворачиваемой корпусной частью, поддерживаемой на узле привода инструмента для приема от него роботизированно сгенерированных выходных движений, причем приводная система содержит:
поворотную приводную шестерню, функционально взаимодействующую с соответствующей поворачиваемой корпусной частью;
первую поворотную ведомую шестерню в зубчатом зацеплении с поворотной приводной шестерней и
вторую поворотную ведомую шестерню, установленную с возможностью перемещения на узел приводного стержня для перемещения в зубчатое зацепление с первой поворотной ведомой шестерней и из него, и причем активируемая вручную система управления выполнена с возможностью избирательного функционального зацепления со второй поворотной ведомой шестерней, перемещения второй поворотной ведомой шестерни из зубчатого зацепления с первой поворотной ведомой шестерней и сообщения генерируемых вручную приводных движений второй поворотной ведомой шестерне.
4. Хирургический инструмент по п. 3, в котором активируемая вручную система управления содержит:
реверсирующую шестерню в зубчатом зацеплении со второй поворотной ведомой шестерней и
храповую шестерню, поддерживаемую с возможностью избирательного зубчатого зацепления с реверсирующей шестерней так, чтобы ручная активация храповой шестерни приводила к сообщению генерируемых вручную управляющих движений реверсирующей шестерне.
5. Хирургический инструмент по п. 4, в котором указанная храповая шестерня установлена с возможностью избирательного поворотного движения относительно реверсирующей шестерни между активированным и неактивированным положением таким образом, чтобы при повороте реверсирующей шестерни из неактивированного положения в активированное положение реверсирующая шестерня смещала по оси вторую поворотную ведомую шестерню из зубчатого зацепления с первой поворотной ведомой шестерней.
6. Хирургический инструмент по п. 1, в котором хирургический концевой эффектор содержит пусковой элемент, функционально взаимодействующий с узлом приводного стержня и реагирующий перемещением на сообщаемые ему первое и второе управляющие движения.
7. Хирургический инструмент по п. 6, в котором пусковой элемент выполнен с возможностью перемещения между исходным положением и конечным положением при сообщении первого и второго управляющих движений узлу приводного стержня.
8. Хирургический инструмент по п. 7, в котором хирургический концевой эффектор содержит:
упор, выполненный с возможностью избирательного перемещения между открытым и закрытым положениями;
систему закрытия упора, функционально взаимодействующую с упором и роботизированной системой, причем система закрытия упора сообщает открывающие и закрывающие управляющие движения при сообщении системе закрытия упора иных роботизированно сгенерированных выходных движений роботизированной системой;
хирургическую кассету со скобами, функционально поддерживаемую смежно с упором и удерживающую множество хирургических скоб, и причем пусковой элемент содержит:
рассекающую ткань часть и
салазки для выталкивания скоб.
9. Хирургический инструмент по п. 8, в котором пусковой элемент приводится из исходного в конечное положение при сообщении первого управляющего движения узлу приводного стержня, причем пусковой элемент приводится из конечного положения в исходное положение при сообщении второго управляющего движения узлу приводного стержня.
10. Хирургический инструмент по п. 8, в котором сообщение первого управляющего движения узлу приводного стержня воздействует на пусковой элемент таким образом, что он перемещается из исходного положения к конечному положению в первом осевом направлении, а сообщение второго управляющего движения узлу приводного стержня воздействует на пусковой элемент таким образом, что он перемещается из конечного положения к исходному положению во втором направлении, противоположном первому направлению, причем сообщение генерируемого вручную управляющего движения узлу приводного стержня воздействует на пусковой элемент таким образом, что он перемещается во втором направлении.
11. Хирургический инструмент для применения с роботизированной системой, включающей в себя узел привода инструмента, функционально связанный с блоком управления роботизированной системы, управление которым осуществляется по входным командам оператора, и который выполнен с возможностью сообщения по меньшей мере одного поворотного выходного движения по меньшей мере одной поворачиваемой корпусной части, поддерживаемой на узле привода инструмента, причем указанный хирургический инструмент содержит:
хирургический концевой эффектор, содержащий по меньшей мере одну компонентную часть, выполненную с возможностью избирательного перемещения между первым и вторым положениями относительно по меньшей мере одной другой его компонентной части в ответ на сообщение управляющих движений составной части, выполненной с возможностью избирательного перемещения;
узел удлиненного стержня, функционально соединенный с хирургическим концевым эффектором, причем узел удлиненного стержня содержит по меньшей мере одну часть, приводимую в движение шестернями, которая находится в функциональной связи по меньшей мере с одной компонентной частью хирургического концевого эффектора, выполненной с возможностью избирательного перемещения;
монтажную часть для инструмента, функционально соединенную с узлом удлиненного стержня, причем монтажная часть для инструмента выполнена с возможностью функционального взаимодействия с узлом привода инструмента при соединении с ним, причем указанная монтажная часть для инструмента содержит:
ведомый элемент, поддерживаемый с возможностью поворота на указанной монтажной части для инструмента и выполненный с возможностью приводного зацепления с соответствующей одной из по меньшей мере одной поворачиваемой корпусной части узла привода инструмента для приема от нее соответствующих поворотных выходных движений, и
приводную систему в функциональном зацеплении с по меньшей мере одной частью, приводимой в движение шестернями, для сообщения ему роботизированно сгенерированных пусковых движений, в результате чего соответствующая одна из по меньшей мере одной части, приводимой в движение шестернями, сообщает по меньшей мере одно управляющее движение компоненту, выполненному с возможностью избирательного перемещения, и причем хирургический инструмент дополнительно содержит
активируемую вручную реверсирующую систему, функционально взаимодействующую с узлом удлиненного стержня для избирательного расцепления приводной системы от по меньшей мере одной части, приводимой в движение шестернями, и для сообщения генерируемых вручную поворотных управляющих движений этой по меньшей мере одной части, приводимой в движение шестернями.
12. Хирургический инструмент по п. 11, в котором приводная система содержит:
поворотную приводную шестерню в приводном зацеплении с ведомым элементом;
первую поворотную ведомую шестерню в зубчатом зацеплении с поворотной приводной шестерней и
вторую поворотную ведомую шестерню, установленную с возможностью перемещения на части поворотного приводного стержня узла удлиненного стержня для перемещения в зубчатое зацепление с первой поворотной ведомой шестерней и из него, причем активируемая вручную реверсирующая система выполнена с возможностью избирательного функционального зацепления со второй поворотной ведомой шестерней, перемещения второй поворотной ведомой шестерни из зубчатого зацепления с первой поворотной ведомой шестерней и сообщения генерируемых вручную управляющих движений второй поворотной ведомой шестерне.
13. Хирургический инструмент по п. 12, в котором активируемая вручную реверсирующая система содержит:
реверсирующую шестерню в зубчатом зацеплении со второй поворотной ведомой шестерней и
храповую шестерню, поддерживаемую с возможностью избирательного зубчатого зацепления с реверсирующей шестерней так, чтобы ручная активация храповой шестерни приводила к сообщению генерируемых вручную управляющих движений реверсирующей шестерне.
14. Хирургический инструмент по п. 13, в котором указанная храповая шестерня установлена с возможностью избирательного поворотного движения относительно реверсирующей шестерни между активированным и неактивированным положением таким образом, чтобы при повороте реверсирующей шестерни из неактивированного положения в активированное положение реверсирующая шестерня смещала по оси вторую поворотную ведомую шестерню из зубчатого зацепления с первой поворотной ведомой шестерней.
15. Хирургический инструмент для применения с роботизированной системой, включающей в себя узел привода инструмента, функционально соединенный с блоком управления роботизированной системы, управление которым осуществляется по входным командам оператора, и который выполнен с возможностью роботизированно генерировать поворотные выходные движения, причем указанный хирургический инструмент содержит:
поворотную приводную систему, выполненную с возможностью взаимодействия с соответствующей частью узла привода инструмента роботизированной системы для приема от нее роботизированно сгенерированных поворотных выходных движений;
узел поворотного приводного стержня, функционально взаимодействующий с поворотной приводной системой и выполненный с возможностью приема роботизированно сгенерированных поворотных выходных движений от поворотной приводной системы и сообщения поворотных приводных движений хирургическому концевому эффектору, функционально взаимодействующему с узлом поворотного приводного стержня, и
активируемую вручную реверсирующую систему, функционально взаимодействующую с узлом поворотного приводного стержня для избирательного расцепления приводной системы от узла поворотного приводного стержня и для сообщения генерируемых вручную поворотных приводных движений узлу поворотного приводного стержня.
16. Хирургический инструмент по п. 15, в котором поворотная приводная система выполнена с возможностью передачи первого из роботизированно сгенерированных поворотных выходных движений на узел приводного стержня, чтобы узел приводного стержня сообщал первое из поворотных приводных движений в первом направлении поворота, причем приводная система дополнительно выполнена с возможностью передачи второго из роботизированно сгенерированных поворотных выходных движений на узел поворотного приводного стержня, чтобы узел поворотного приводного стержня сообщал второе из поворотных приводных движений во втором направлении поворота, противоположном первому направлению поворота, и причем генерируемые вручную управляющие движения сообщаются узлу поворотного приводного стержня во втором направлении поворота.
17. Хирургический инструмент по п. 15, в котором поворотная приводная система выполнена с возможностью функционального взаимодействия с соответствующей поворачиваемой корпусной частью, поддерживаемой на узле привода инструмента для приема от него поворотных выходных движений, причем поворотная приводная система содержит:
поворотную приводную шестерню, функционально взаимодействующую с соответствующей поворачиваемой корпусной частью;
первую поворотную ведомую шестерню в зубчатом зацеплении с поворотной приводной шестерней и
вторую поворотную ведомую шестерню, установленную с возможностью перемещения на узле поворотного приводного стержня для перемещения в зубчатое зацепление с первой поворотной ведомой шестерней и из него, и причем активируемая вручную реверсирующая система выполнена с возможностью избирательного функционального зацепления со второй поворотной ведомой шестерней, перемещения второй поворотной ведомой шестерни из зубчатого зацепления с первой поворотной ведомой шестерней и сообщения генерируемых вручную поворотных приводных движений второй поворотной ведомой шестерне.
18. Хирургический инструмент по п. 17, в котором активируемая вручную реверсирующая система содержит:
реверсирующую шестерню в зубчатом зацеплении со второй поворотной ведомой шестерней и
храповую шестерню, поддерживаемую с возможностью избирательного зубчатого зацепления с реверсирующей шестерней так, чтобы ручная активация храповой шестерни приводила к сообщению генерируемых вручную поворотных приводных движений реверсирующей шестерне.
19. Хирургический инструмент по п. 18, в котором указанная храповая шестерня установлена с возможностью избирательного поворотного движения относительно реверсирующей шестерни между активированным и неактивированным положением таким образом, чтобы при повороте реверсирующей шестерни из неактивированного положения в активированное положение реверсирующая шестерня смещала по оси вторую поворотную ведомую шестерню из зубчатого зацепления с первой поворотной ведомой шестерней.
20. Хирургический инструмент по п. 15, в котором хирургический концевой эффектор содержит пусковой элемент, функционально взаимодействующий с узлом поворотного приводного стержня и реагирующий перемещением на сообщаемые ему первое и второе поворотные приводные движения.
| US 2011290854 A1, 01.12.2011 | |||
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВЫЙ ПРИВОДНОЙ МЕХАНИЗМ ЗАПУСКА С ПОВОРОТНОЙ РУЧНОЙ ОТВОДЯЩЕЙ СИСТЕМОЙ С ВОЗВРАТНОЙ ПРУЖИНОЙ | 2006 |
|
RU2420240C2 |
| US 2009057369 A1, 05.03.2009 | |||
| US 2011288573 A1, 24.11.2011 | |||
| US 2011118754 A1, 19.05.2011. | |||

