ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Эта заявка основана на и испрашивает приоритет по заявке на патент Китая № 201510253929.X, поданной 18 мая, 2015, все содержимое которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее раскрытие в основном относится к технической области носимых устройств, и более конкретно, к способу и устройству для распознавания объекта.
УРОВЕНЬ ТЕХНИКИ
[0003] В реальной жизни, часто используются объекты, такие как устройства дистанционного управления или ножи для фруктов, но часто помещаются небрежно. Люди иногда могут забыть расположения, где эти объекты помещены, или эти объекты могут быть перемещены другими людьми и не могут быть найдены. Это может создать ненужные трудности для пользователей.
[0004] Пока что, главным образом для нахождения объектов используется способ звуковой активации. Конкретно, активируемое звуком устройство располагается на объекте, когда удовлетворяется условие инициирования, активируемое звуком устройство на объекте включается, чтобы издать звуки. Таким образом, пользователи могут найти объект.
[0005] Однако, такой способ требует, чтобы активируемое звуком устройство было заранее расположено на объекте, и если нужно найти много объектов, увеличивается число активируемых звуком устройств, которые должны быть расположены. Следовательно, реализации являются сложными и неудобными. Таким образом, есть срочная необходимость в простом и эффективном способе нахождения объектов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Варианты осуществления настоящего раскрытия предусматривают способ и устройство для распознавания объекта для того, чтобы решить проблему, что существующий способ поиска объектов является сложным и неудобным.
[0007] Согласно первому аспекту вариантов осуществления настоящего раскрытия, предусматривается способ распознавания объекта. Способ применяется в носимом устройстве и включает в себя:
[0008] определение объекта, который должен быть распознан; и
[0009] когда предварительно заданное условие удовлетворено, локализацию и отчетливое отображение объекта, который должен быть распознан.
[0010] В варианте осуществления, определение объекта, который должен быть распознан, включает в себя:
[0011] распознавание текущего объекта, и определение объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте; или
[0012] получение информации объекта, соответствующей параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, и определение объекта, который должен быть распознан, соответствующего параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта; или
[0013] прием информации о целевом объекте, отправленной из устройства распознавания изображений, и определение объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте.
[0014] В варианте осуществления, до определения объекта, который должен быть распознан, способ дополнительно включает в себя:
[0015] прием и сохранение таблицы взаимосвязей для сопоставления объектов, при этом таблица взаимосвязей для сопоставления объектов включает в себя соответствия между совпадающими объектами.
[0016] В варианте осуществления, перед получением информации объекта, соответствующей параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, способ дополнительно включает в себя:
[0017] прием информации поведения, введенной пользователем, и сохранение информации поведения; или
[0018] осуществление сбора информации поведения пользователя и сохранение информации поведения.
[0019] В варианте осуществления, удовлетворение предварительно заданного условия включает в себя:
[0020] обнаружение, что изменение угла носимого устройства превышает предварительно заданную пороговую величину угла; или
[0021] обнаружение, что включена кнопка для отчетливого отображения на носимом устройстве.
[0022] В варианте осуществления, удовлетворение предварительно заданного условия включает в себя:
[0023] обнаружение, что текущее время достигает времени, записанного в предварительно сохраненной информации поведения; и/или
[0024] обнаружение, что текущее размещение соответствует размещению, записанному в предварительно сохраненной информации поведения.
[0025] В варианте осуществления, отчетливое отображение объекта, который должен быть распознан, включает в себя:
[0026] отображение объекта, который должен быть распознан, с помощью увеличенной части или всего объекта; или
[0027] осуществление мигания объекта, который должен быть распознан.
[0028] Согласно второму аспекту вариантов осуществления настоящего раскрытия, предусматривается способ распознавания объекта, включающий в себя:
[0029] получение информации о целевом объекте; и
[0030] отправку информации о целевом объекте на носимое устройство, так чтобы носимое устройство определило объект, который должен быть распознан, согласно информации о целевом объекте, локализовало объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отобразило объект, который должен быть распознан.
[0031] В варианте осуществления, получение информации о целевом объекте включает в себя:
[0032] сканирование информации объекта в пределах текущего диапазона обзора; и
[0033] определение, находится ли просканированная информация объекта в предварительно сохраненной таблице информации целевого объекта, и если просканированная информация объекта находится в предварительно сохраненной таблице информации целевого объекта, определение, что просканированная информация объекта является информацией о целевом объекте.
[0034] В варианте осуществления, до определения, находится ли просканированная информация объекта в предварительно сохраненной таблице информации целевого объекта, способ дополнительно включает в себя:
[0035] прием и сохранение таблицы информации целевого объекта, при этом таблица информации целевого объекта включает в себя информацию объекта, совпадающего с объектом, который должен быть распознан.
[0036] Согласно третьему аспекту вариантов осуществления настоящего раскрытия, предусматривается устройство для распознавания объекта. Устройство применяется в носимом устройстве и включает в себя:
[0037] модуль определения, выполненный с возможностью определения объекта, который должен быть распознан; и
[0038] модуль отображения, выполненный с возможностью, когда предварительно заданное условие удовлетворено, локализации и отчетливого отображения объекта, который должен быть распознан, который определен модулем определения.
[0039] В варианте осуществления, модуль определения включает в себя:
[0040] первый подмодуль определения, выполненный с возможностью распознавания текущего объекта и определения объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте; или
[0041] второй подмодуль определения, выполненный с возможностью получения информации объекта, соответствующей параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, и определения объекта, который должен быть распознан, соответствующего параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта; или
[0042] третий подмодуль определения, выполненный с возможностью приема информации о целевом объекте, отправленной из устройства распознавания изображений, и определения объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте.
[0043] В варианте осуществления, устройство может дополнительно включать в себя:
[0044] первый модуль сохранения, выполненный с возможностью, до определения модулем определения объекта, который должен быть распознан, приема и сохранения таблицы взаимосвязей для сопоставления объектов, при этом таблица взаимосвязей для сопоставления объектов включает в себя соответствия между совпадающими объектами.
[0045] В варианте осуществления, устройство может дополнительно включать в себя:
[0046] второй модуль сохранения, выполненный с возможностью, до получения информации объекта, соответствующей параметрам времени и/или размещения, вторым подмодулем определения, согласно предварительно сохраненной информации поведения, приема информации поведения, введенной пользователем, и сохранения информации поведения; или осуществления сбора информации поведения пользователя и сохранения информации поведения.
[0047] В варианте осуществления, модуль отображения включает в себя:
[0048] первый подмодуль обнаружения, выполненный с возможностью обнаружения, что изменение угла носимого устройства превышает предварительно заданную пороговую величину угла; или
[0049] второй подмодуль обнаружения, выполненный с возможностью обнаружения, что включена кнопка для отчетливого отображения на носимом устройстве.
[0050] В варианте осуществления, модуль отображения включает в себя:
[0051] третий подмодуль обнаружения, выполненный с возможностью обнаружения, что текущее время достигает времени, записанного в предварительно сохраненной информации поведения; и/или обнаружения, что текущее размещение соответствует размещению, записанному в предварительно сохраненной информации поведения.
[0052] В варианте осуществления, модуль отображения включает в себя:
[0053] первый подмодуль отображения, выполненный с возможностью отображения объекта, который должен быть распознан, с помощью увеличенной части или всего объекта; или
[0054] второй подмодуль отображения, выполненный с возможностью осуществления мигания объекта, который должен быть распознан.
[0055] Согласно четвертому аспекту вариантов осуществления настоящего раскрытия, предусматривается устройство для распознавания объекта, включающее в себя:
[0056] модуль получения, выполненный с возможностью получения информации о целевом объекте; и
[0057] модуль отправки, выполненный с возможностью отправки информации о целевом объекте, полученной модулем получения, на носимое устройство, так что носимое устройство определяет объект, который должен быть распознан, согласно информации о целевом объекте, локализовало объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отображает объект, который должен быть распознан.
[0058] В варианте осуществления, модуль получения включает в себя:
[0059] подмодуль сканирования, выполненный с возможностью сканирования информации объекта в пределах текущего диапазона обзора; и
[0060] подмодуль определения, выполненный с возможностью определения, находится ли информация объекта, просканированная подмодулем сканирования, в предварительно сохраненной таблице информации целевого объекта, и если просканированная информация объекта находится в предварительно сохраненной таблице информации целевого объекта, определения, что просканированная информация объекта является информацией о целевом объекте.
[0061] В варианте осуществления, модуль получения дополнительно включает в себя:
[0062] подмодуль сохранения, выполненный с возможностью, до определения подмодулем определения, находится ли просканированная информация объекта в предварительно сохраненной таблице информации целевого объекта, приема и сохранения таблицы информации целевого объекта, при этом таблица информации целевого объекта включает в себя информацию объекта, совпадающего с объектом, который должен быть распознан.
[0063] Согласно пятому аспекту вариантов осуществления настоящего раскрытия, предусматривается устройство для распознавания объекта, включающее в себя:
[0064] процессор; и
[0065] память для хранения инструкций, исполняемых процессором;
[0066] при этом процессор выполнен с возможностью:
[0067] определения объекта, который должен быть распознан; и
[0068] когда предварительно заданное условие удовлетворено, локализации и отчетливого отображения объекта, который должен быть распознан.
[0069] Согласно шестому аспекту вариантов осуществления настоящего раскрытия, предусматривается устройство для распознавания объекта, включающее в себя:
[0070] процессор; и
[0071] память для хранения инструкций, исполняемых процессором;
[0072] при этом процессор выполнен с возможностью:
[0073] получения информации о целевом объекте; и
[0074] отправки информации о целевом объекте на носимое устройство, так чтобы носимое устройство определило объект, который должен быть распознан, согласно информации о целевом объекте, локализовало объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отобразило объект, который должен быть распознан.
[0075] Технические решения, предусмотренные вариантами осуществления по настоящему раскрытию, могут иметь нижеследующие полезные эффекты:
[0076] В технических решениях, предусмотренных вариантами осуществления настоящего раскрытия, определяется объект, который должен быть распознан, и когда предварительно заданное условие удовлетворено, объект, который должен быть распознан локализуется и отчетливо отображается. Таким образом, пользователь может своевременно найти соответствующий объект. Реализации вариантов осуществления являются простыми и эффективными, и таким образом могут помочь пользователю очень удобным образом найти объект, который хочет пользователь.
[0077] Следует понимать, что как вышеприведенное описание, так и нижеследующее подробное описание являются примерными и только примерными и не ограничивают настоящее раскрытие, которое заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0078] Прилагаемые чертежи, которые включены в состав и образуют часть этого описания, иллюстрируют варианты осуществления, соответствующие данному изобретению, и вместе с данным описанием служат для разъяснения принципов данного изобретения.
[0079] Фиг.1 является блок-схемой последовательности операций, показывающей способ распознавания объекта, согласно примерному варианту осуществления.
[0080] Фиг.2 является принципиальной схемой, показывающей сценарий для распознавания объекта, согласно примерному варианту осуществления.
[0081] Фиг.3 является блок-схемой последовательности операций, показывающей другой способ распознавания объекта, согласно примерному варианту осуществления.
[0082] Фиг.4 является блок-схемой последовательности операций, показывающей другой способ распознавания объекта, согласно примерному варианту осуществления.
[0083] Фиг.5 является принципиальной схемой, показывающей сценарий для распознавания объекта, согласно примерному варианту осуществления.
[0084] Фиг.6 является блок-схемой последовательности операций, показывающей другой способ распознавания объекта, согласно примерному варианту осуществления.
[0085] Фиг.7 является блок-схемой последовательности операций, показывающей другой способ распознавания объекта, согласно примерному варианту осуществления.
[0086] Фиг.8 является блок-схемой, показывающей устройство для распознавания объекта, согласно примерному варианту осуществления.
[0087] Фиг.9A является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления.
[0088] Фиг.9B является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления.
[0089] Фиг.9C является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления.
[0090] Фиг.9D является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления.
[0091] Фиг.9E является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления.
[0092] Фиг.9F является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления.
[0093] Фиг.10 является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления.
[0094] Фиг.11A является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления.
[0095] Фиг.11B является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления.
[0096] Фиг.12 является блок-схемой, показывающей структуру, применимую в устройстве для распознавания объекта, согласно примерному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0097] Теперь будет подробно сделана ссылка на примерные варианты осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. Нижеследующее описание ссылается на прилагаемые чертежи, на которых одинаковые номера на разных чертежах представляют одинаковые или аналогичные элементы пока не представлено иначе. Реализации, изложенные в нижеследующем описании примерных вариантов осуществления, не представляют все реализации, соответствующие данному изобретению. Наоборот, они являются лишь примерами устройств и способов, соответствующих аспектам, относящимся к данному изобретению, как изложено в прилагаемой формуле изобретения.
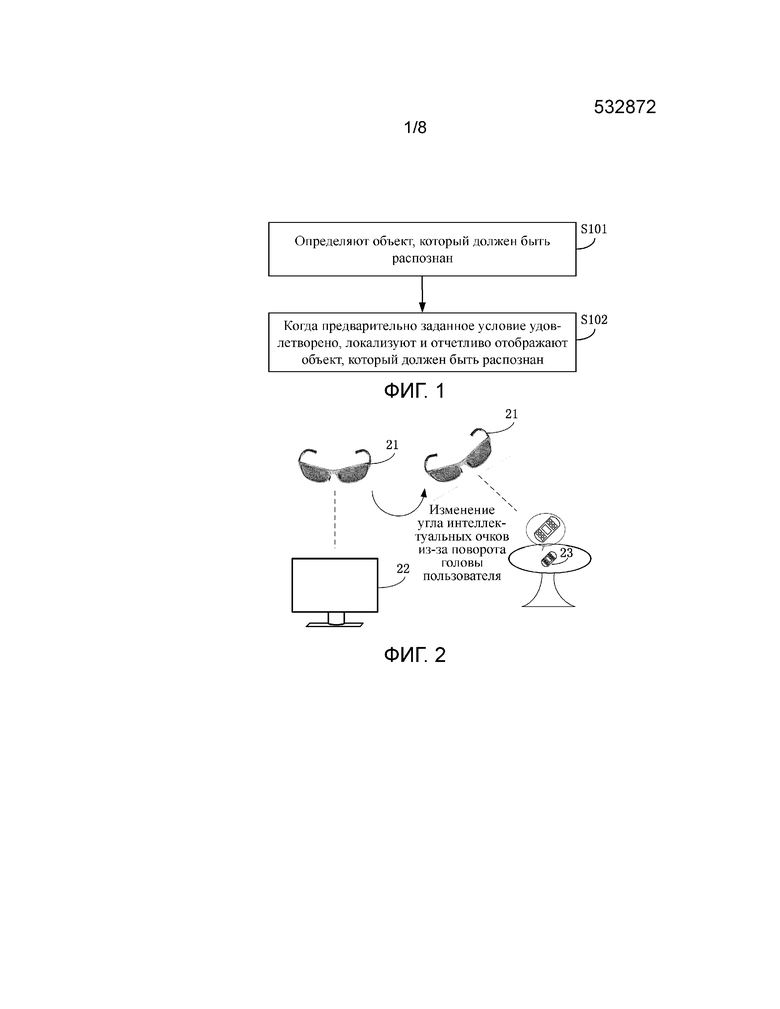
[0098] Фиг.1 является блок-схемой последовательности операций, показывающей способ распознавания объекта, согласно примерному варианту осуществления. Как показано на Фиг.1, способ распознавания объекта может быть применен в носимом устройстве, которое может включать в себя, но не ограничено этим, интеллектуальные очки, интеллектуальный шлем и подобные. Способ распознавания объекта может включать в себя нижеследующие этапы S101-S102.
[0099] На этапе S101, определяют объект, который должен быть распознан.
[00100] В варианте осуществления, носимое устройство может определить объект, который должен быть распознан, посредством различных способов. Например, текущий объект может быть распознан, и объект, который должен быть распознан, может быть определен посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте.
[00101] Например, если пользователь хочет найти устройство дистанционного управления от телевизора, пользователь может сначала надеть интеллектуальные очки, и затем пристально смотреть на телевизор некоторый период времени, например, три секунды, так чтобы интеллектуальные очки могли распознать, что текущий объект является телевизором. Затем носимое устройство может определить объект, который должен быть распознан в текущий момент, посредством осуществления опроса таблицы взаимосвязей для сопоставления объектов. Таблица взаимосвязей для сопоставления объектов сохраняет соответствия между совпадающими объектами.
[00102] Следует отметить, что должен пристально смотреть на текущий объект, такой как телевизор, некоторый период времени (например, три секунды или более), для того, чтобы улучшить эффективность распознавания. Предполагается, что пользователь носит интеллектуальные очки и хочет найти объект, совпадающий с объектом A, но пользователь пристально смотрит на объект B одну секунду ненамеренно. Если нет ограничения на продолжительность периода времени, чтобы пристально смотреть, но объект распознается непосредственно, интеллектуальные очки сначала распознают объект B. Это абсолютно понизит эффективность распознавания для интеллектуальных очков.
[00103] К тому же, до осуществления опроса таблицы взаимосвязей для сопоставления объектов, способ может дополнительно включать в себя сохранение вышеуказанной таблицы взаимосвязей для сопоставления объектов.
[00104] На этапе S102, когда предварительно заданное условие удовлетворено, объект, который должен быть распознан, локализуют и отчетливо отображают.
[00105] В варианте осуществления, предварительно заданное условие ссылается на условие для инициирования отчетливого отображения объекта носимым устройством. Например, предварительно заданное условие может предполагать, что изменение угла носимого устройства превышает предварительно заданную пороговую величину угла, которая может быть гибко задана согласно фактическим требованиям, или может предполагать, что включена кнопка для отчетливого отображения на носимом устройстве, и подобное.
[00106] Когда интеллектуальные очки отвечают условию для отчетливого отображения объектов, расположение объекта, который должен быть распознан, такого как устройство дистанционного управления, может быть найдено автоматически, и объект может быть отчетливо отображен в соответствующем расположении, так чтобы пользователь мог своевременно найти объект. Соответствующее расположение может относиться к расположению в пределах предварительно заданного диапазона от объекта. Предварительно заданный диапазон может составлять один сантиметр или три сантиметра и т.д., и конкретный диапазон может быть гибко задан согласно факторам, таким как размер объекта. Отчетливым отображением объекта может быть увеличение объекта, или отображение объекта с помощью увеличенной части объекта, или осуществление мигания объекта, т.е., сначала увеличение объекта, затем уменьшение объекта и затем снова увеличение объекта. Вышеуказанное является некоторыми примерами для отчетливого отображения объектов, но настоящий вариант осуществления не накладывает ограничения на способы отчетливого отображения объектов.
[00107] Настоящее раскрытие будет иллюстративно описано со ссылкой на Фиг.2. Как показано на Фиг.2, когда пользователь не может найти устройство дистанционного управления для телевизора, пользователь может надеть интеллектуальные очки 21 и затем пристально смотреть на телевизор 22 некоторый период времени, такой как пять секунд. Затем, интеллектуальные очки 21 могут распознать, что объектом, на который пользователь пристально смотрит в текущий момент, является телевизором 22, и затем опросить таблицу взаимосвязей для сопоставления объектов для определения, что объектом (т.е., объектом, который должен быть распознан интеллектуальными очками), который хочет найти пользователь, является устройство дистанционного управления 23, совпадающее с телевизором 22. Когда пользователь поворачивает его/ее голову, интеллектуальные очки 21 могут обнаружить, что изменение угла превышает предварительно заданную пороговую величину угла, т.е., встречено условие инициирования для отчетливого отображения объектов, и затем интеллектуальные очки 21 могут локализовать устройство дистанционного управления 23 и отобразить устройство дистанционного управления 23 в поле обзора с помощью увеличенного устройства дистанционного управления 23. Увеличение может быть как показано на Фиг.2, например, может всплыть кружок в расположении, где размещается устройство дистанционного управления 23, и увеличенное устройство дистанционного управления отображается в кружке.
[00108] Таким образом, посредством данного способа, пользователь может удобным образом и своевременно найти объект, который он/она хочет найти. Это способ особенно подходит для людей со слабым зрением, или применим в сценариях, когда пользователь находится в окружении при плохом свете, или когда вблизи объекта, который должен быть распознан, есть относительно много объектов.
[00109] В вышеуказанном варианте осуществления способа распознавания объекта, определяется объект, который должен быть распознан, и когда предварительно заданное условие удовлетворено, объект, который должен быть распознан, локализуется и отчетливо отображается. Таким образом, пользователь может своевременно найти соответствующий объект. Реализации варианта осуществления являются простыми и эффективными, и таким образом могут помочь пользователю очень удобным образом найти объект, который хочет пользователь.
[00110] В варианте осуществления, определение объекта, который должен быть распознан, может включать в себя:
[00111] распознавание текущего объекта, и определение объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте; или
[00112] получение информации объекта, соответствующей параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, и определение объекта, который должен быть распознан, соответствующего параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта; или
[00113] прием информации о целевом объекте, отправленной из устройства распознавания изображений, и определение объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте.
[00114] В варианте осуществления, до определения объекта, который должен быть распознан, способ может дополнительно включать в себя:
[00115] прием и сохранение таблицы взаимосвязей для сопоставления объектов, при этом таблица взаимосвязей для сопоставления объектов включает в себя соответствия между совпадающими объектами.
[00116] В варианте осуществления, перед получением информации объекта, соответствующей параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, способ может дополнительно включать в себя:
[00117] прием информации поведения, введенной пользователем, и сохранение информации поведения; или
[00118] осуществление сбора информации поведения пользователя и сохранение информации поведения.
[00119] В варианте осуществления, удовлетворение предварительно заданного условия может включать в себя:
[00120] обнаружение, что изменение угла носимого устройства превышает предварительно заданную пороговую величину угла; или
[00121] обнаружение, что включена кнопка для отчетливого отображения на носимом устройстве.
[00122] В варианте осуществления, удовлетворение предварительно заданного условия может включать в себя:
[00123] обнаружение, что текущее время достигает времени, записанного в предварительно сохраненной информации поведения; и/или
[00124] обнаружение, что текущее размещение соответствует размещению, записанному в предварительно сохраненной информации поведения.
[00125] В варианте осуществления, отчетливое отображение объекта, который должен быть распознан, может включать в себя:
[00126] отображение объекта, который должен быть распознан, с помощью увеличенной части или всего объекта; или
[00127] осуществление мигания объекта, который должен быть распознан.
[00128] В отношении того, как просто и эффективно распознать объект, обратимся к нижеследующим вариантам осуществления.
[00129] Так как до сих пор, из вышеуказанных описанный может быть видно, что способы, предусмотренные вариантами осуществления настоящего раскрытия, могут помочь пользователю очень удобным образом найти объект, который он/она хочет.
[00130] В дальнейшем, технические решения, предусмотренные вариантами осуществления настоящего раскрытия, описываются со ссылкой на подробные варианты осуществления.
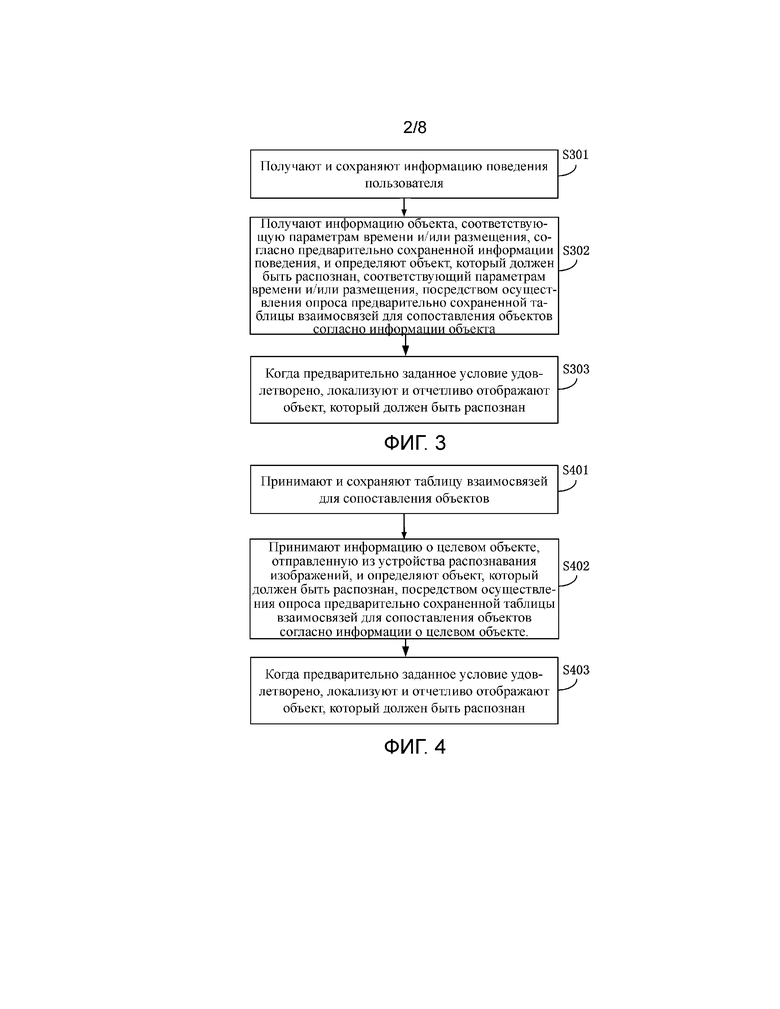
[00131] Фиг.3 является блок-схемой последовательности операций, показывающей способ распознавания объекта, согласно примерному варианту осуществления. Как показано на Фиг.3, способ включает в себя нижеследующие этапы S301-S303.
[00132] На этапе S301, получают и сохраняют информацию поведения пользователя.
[00133] В варианте осуществления, носимое устройство (например, интеллектуальные очки) способно принимать информацию поведения, вручную введенную пользователем, и сохранять информацию поведения, или автоматически записывать информацию поведения пользователя, посредством синхронизации по времени, GPS-размещения или распознавания изображения и подобного.
[00134] Информация поведения может относиться к поведениям, имеющим отношение к определенному объекту, осуществляемым пользователем в определенном размещении в пределах определенного периода времени, например, пользователю нравится смотреть игры с мячом в гостиной его/ее дома с семи до одиннадцати часов каждую ночь пятницы. Или, информация поведения может относиться к поведениям, имеющим отношение к некоторому объекту, осуществляемым пользователем в пределах некоторого периода времени, или может относиться к поведениям, имеющим отношение к некоторому объекту, осуществляемым пользователем в некотором размещении.
[00135] На этапе S302, информацию объекта, соответствующую параметрам времени и/или размещения получают согласно предварительно сохраненной информации поведения, и объект, который должен быть распознан, соответствующий параметрам времени и/или размещения, определяют посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта.
[00136] В варианте осуществления, носимое устройство, такое как интеллектуальные очки, может получить информацию объекта, соответствующую параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения. Например, согласно части информации, что "пользователю нравится смотреть игры с мячом в гостиной его/ее дома с семи до одиннадцати часов каждую ночь пятницы", носимое устройство может определить, что информация объекта, соответствующая времени (т.е., с семи до одиннадцати часов каждую ночь пятницы) и размещению (т.е., гостиная дома), является телевизором, и затем может определить, что объектом, который должен быть распознан, является устройство дистанционного управления, согласно телевизору и таблице взаимосвязей для сопоставления объектов.
[00137] На этапе S303, когда предварительно заданное условие удовлетворено, объект, который должен быть распознан, локализуют и отчетливо отображают.
[00138] В варианте осуществления, когда интеллектуальные очки обнаруживают, что текущее время достигает времени, записанного в предварительно сохраненной информации поведения, и/или когда текущим размещением является размещение, записанное в предварительно сохраненной информации поведения, интеллектуальные очки автоматически находят расположение объекта, который должен быть распознан (например, устройство дистанционного управления), и затем отчетливо отображают объект в соответствующем расположении, так чтобы пользователь мог своевременно найти объект. Соответствующее расположение может относится к расположению в пределах предварительно заданного диапазона от объекта. Предварительно заданный диапазон может составлять два или четыре сантиметра и т.д. Отчетливым отображением объекта может быть увеличение объекта, или отображение объекта с помощью увеличенной части объекта, или осуществление мигания объекта, т.е., сначала увеличение объекта, затем уменьшение объекта и затем снова увеличение объекта.
[00139] Из вышеуказанных описаний может быть видно, что в вышеуказанных вариантах осуществления, носимое устройство, такое как интеллектуальные очки, может отчетливо отображать объект, который пользователь хочет найти, в пределах конкретного записанного времени согласно информации поведения, записанной пользователем, и тем самым помогает пользователю удобным образом найти объект, который ему/ей нужен.
[00140] Фиг.4 является блок-схемой последовательности операций, показывающей способ распознавания объекта, согласно примерному варианту осуществления. Как показано на Фиг.4, способ включает в себя нижеследующие этапы S401-S403.
[00141] На этапе S401, принимают и сохраняют таблицу взаимосвязей для сопоставления объектов.
[00142] В варианте осуществления, носимое устройство, такое как интеллектуальные очки, может принять таблицу взаимосвязей для сопоставления объектов, введенную пользователем, и сохранить таблицу взаимосвязей для сопоставления объектов.
[00143] На этапе S402, принимают информацию о целевом объекте, отправленную из устройства распознавания изображений, и объект, который должен быть распознан, определяют посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте.
[00144] В варианте осуществления, когда пользователь распознает объект посредством носимого устройства, такого как интеллектуальные очки, интеллектуальные очки могут быть не способны распознать объект. Например, когда пользователь курит, интеллектуальные очки не могут распознать сигарету. Для того, чтобы решить эту проблему, целевой объект (например, сигарета) может быть распознан другими устройствами, например, устройствами распознавания изображения, такими как камера, и информация о целевом объекте может быть отправлена в интеллектуальные очки. После приема информации о целевом объекте, интеллектуальные очки определяют объект, который должен быть распознан посредством осуществления опроса вышеуказанной таблицы взаимосвязей для сопоставления объектов.
[00145] Следует отметить, что носимое устройство, такое как интеллектуальные очки, может распознать множества объектов одновременно. Например, носимое устройство может распознавать объект (т.е., зажигалку), совпадающий с сигаретой, вышеуказанным способом, или может распознать объект (т.е., устройство дистанционного управления), совпадающий с телевизором, посредством вариантов осуществления, как показано на Фиг.1 или 3.
[00146] На этапе S403, когда предварительно заданное условие удовлетворено, объект, который должен быть распознан, локализуют и отчетливо отображают.
[00147] В варианте осуществления, когда изменение угла носимого устройства превышает предварительно заданную пороговую величину угла, например, 30 градусов, носимое устройство может автоматически найти расположение объекта, который должен быть распознан (например, устройство дистанционного управления), и отчетливо отобразить объект в соответствующем расположении. Или, когда включена кнопка для отчетливого отображения на носимом устройстве, носимое устройство может автоматически найти расположение объекта, который должен быть распознан (например, устройство дистанционного управления), и отчетливо отобразить объект в соответствующем расположении.
[00148] Отчетливым отображением объекта может быть отображение объекта с помощью увеличенного объекта, или отображение объекта с помощью увеличенной части объекта, или осуществление мигания объекта, и подобное.
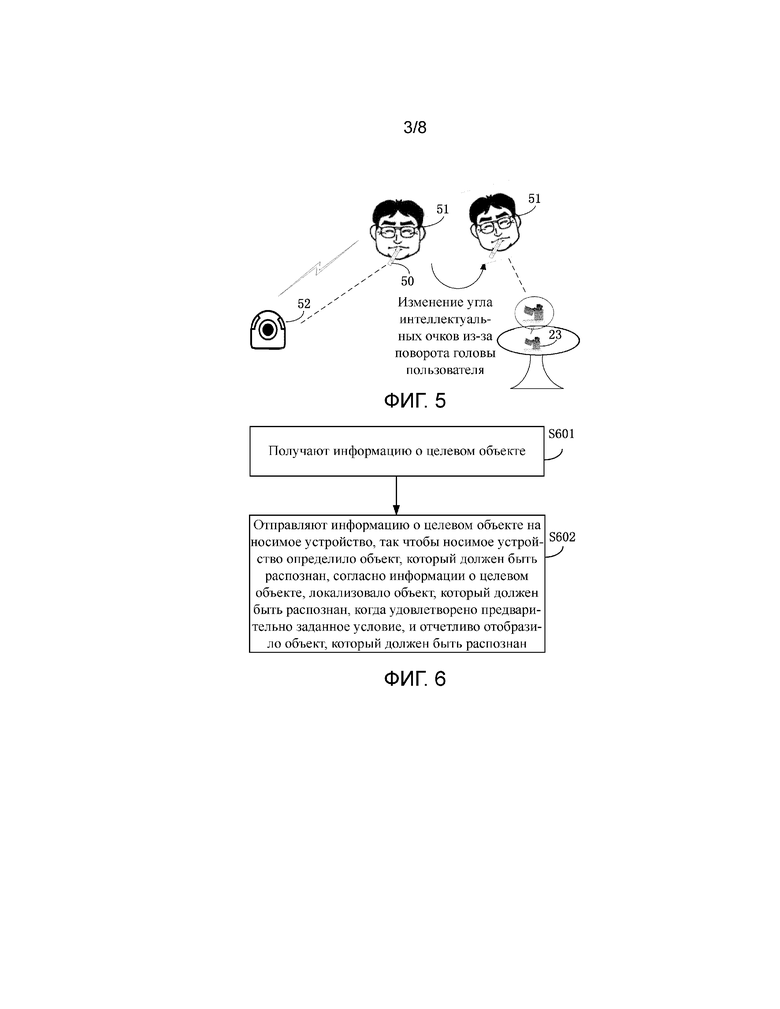
[00149] Настоящее раскрытие будет иллюстративно описано со ссылкой на Фиг.5. Как показано на Фиг.5, пользователь смотрит телевизор в гостиной с сигаретой 50 во рту, но он не может найти зажигалку. Затем, пользователь надевает интеллектуальные очки 51, чтобы найти зажигалку. Однако, интеллектуальные очки 51 не могут распознать сигарету, тогда как камера 52 в гостиной может распознать сигарету 50 и определить, что распознанная сигарета 50 находится в таблице информации целевого объекта, сохраненной камерой 52. Таким образом, камера 52 отправляет информацию о сигарете 50 в интеллектуальные очки 51 посредством Bluetooth или WIFI. После приема информации о сигарете 50, интеллектуальные очки определяют, что объект, совпадающий с сигаретой 50, является зажигалкой, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов, и затем автоматически отображают зажигалку с помощью увеличенной зажигалки в поле обзора.
[00150] Может быть видно, что посредством устройства распознавания изображений, такого как камера и интеллектуальные очки, пользователь может удобным образом найти объект, который он/она хочет.
[00151] Фиг.6 является блок-схемой последовательности операций, показывающей другой способ распознавания объекта, согласно примерному варианту осуществления. Способ может быть применен в устройстве распознавания изображений, которое может включать в себя камеру, но не ограничено этим. Способ может включать в себя нижеследующие этапы S601-S602.
[00152] На этапе S601, получают информацию о целевом объекте.
[00153] В варианте осуществления, информация о целевом объекте может относиться к объектам, которые интеллектуальные очки не могут распознать, т.е., объектам, совпадающим с объектом, который должен быть найден, например, сигарета на Фиг.5.
[00154] На этапе S602, информацию о целевом объекте отправляют на носимое устройство, так чтобы носимое устройство определило объект, который должен быть распознан, согласно информации о целевом объекте, локализовало объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отобразило объект, который должен быть распознан.
[00155] В варианте осуществления, после получения информации о целевом объекте, устройство распознавания изображений может отправить носимому устройству, такому как интеллектуальные очки, информацию о целевом объекте посредством Bluetooth или WIFI, и подобного.
[00156] После приема информации о целевом объекте, носимое устройство определяет объект, который должен быть распознан, и отчетливо отображает объект. Процедуры для определения и отчетливого отображения объекта являются такими же, как процедуры в варианте осуществления, который показан на Фиг.1, и подробные описания опущены.
[00157] В вышеуказанном варианте осуществления способа распознавания объекта, получают информацию о целевом объекте; и информация о целевом объекте отправляется на носимое устройство, так чтобы носимое устройство определило объект, который должен быть распознан, согласно информации о целевом объекте, локализовало объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отобразило объект, который должен быть распознан. Таким образом, пользователь может своевременно найти соответствующий объект. Реализации вариантов осуществления являются простыми и эффективными, и таким образом могут помочь пользователю очень удобным образом найти объект, который хочет пользователь.
[00158] В варианте осуществления, получение информации о целевом объекте может включать в себя:
[00159] сканирование информации объекта в пределах текущего диапазона обзора; и
[00160] определение, находится ли просканированная информация объекта в предварительно сохраненной таблице информации целевого объекта, и если просканированная информация объекта находится в предварительно сохраненной таблице информации целевого объекта, определение, что просканированная информация объекта является информацией о целевом объекте.
[00161] В варианте осуществления, до определения, находится ли просканированная информация объекта в предварительно сохраненной таблице информации целевого объекта, способ может дополнительно включать в себя:
[00162] прием и сохранение таблицы информации целевого объекта, при этом таблица информации целевого объекта включает в себя информацию объекта, совпадающего с объектом, который должен быть распознан.
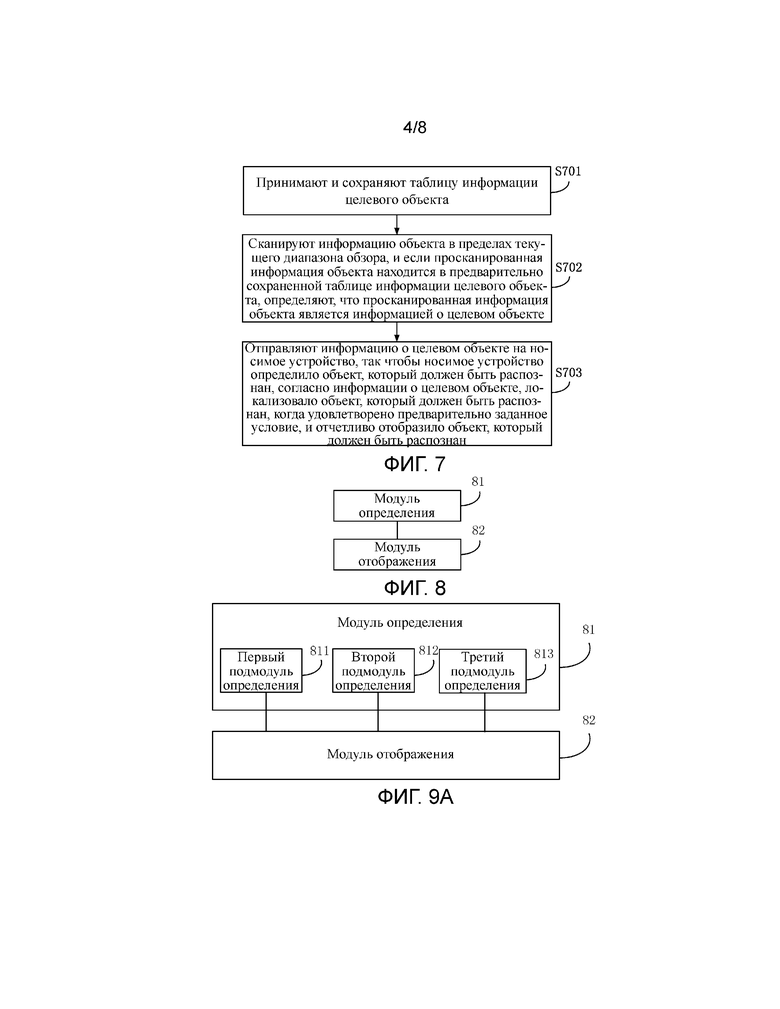
[00163] Фиг.7 является блок-схемой последовательности операций, показывающей способ распознавания объекта, согласно примерному варианту осуществления. Способ может быть применен в камере и может включать в себя нижеследующие этапы S701-S703.
[00164] На этапе S701, принимают и сохраняют таблицу информации целевого объекта.
[00165] В варианте осуществления, камера сохраняет таблицу информации целевого объекта для определения, является ли распознанный объект целевым объектом.
[00166] На этапе S702, сканируют информацию объекта в пределах текущего диапазона обзора, и если просканированная информация объекта находится в предварительно сохраненной таблице информации целевого объекта, определяется, что просканированная информация объекта является информацией о целевом объекте.
[00167] В варианте осуществления, камера сканирует информацию объекта в пределах текущего диапазона обзора. Предполагается, что камера находит объект A посредством сканирования. Если объект A находится в таблице информации целевого объекта, объект A является целевым объектом; иначе, если объект A не находится в таблице информации целевого объекта, объект A не является целевым объектом.
[00168] На этапе S703, информацию о целевом объекте отправляют на носимое устройство, так чтобы носимое устройство определило объект, который должен быть распознан, согласно информации о целевом объекте, локализовало объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отобразило объект, который должен быть распознан.
[00169] В варианте осуществления, после определения, что объект A является целевым объектом, камера отправляет носимому устройству, такому как интеллектуальные очки, информацию об объекте A. После приема информации об объекте A (например, сигарете), носимое устройство определяет, что информацией, совпадающей с сигаретой, является зажигалка. Когда пользователь поворачивает его/ее голову, т.е., изменение угла интеллектуальных очков больше, чем предварительно заданная пороговая величина угла, интеллектуальные очки могут отобразить зажигалку посредством мигания.
[00170] В вышеуказанных вариантах осуществления способов для распознавания объекта, информацию о целевом объекте получают посредством сохранения таблицы информации целевого объекта; и информация о целевом объекте отправляется на носимое устройство, так чтобы носимое устройство определило объект, который должен быть распознан, согласно информации о целевом объекте, локализовало объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отобразило объект, который должен быть распознан. Таким образом, пользователь может своевременно найти соответствующий объект. Реализации вариантов осуществления являются простыми и эффективными, и таким образом могут помочь пользователю очень удобным образом найти объект, который хочет пользователь.
[00171] Фиг.8 является блок-схемой, показывающей устройство для распознавания объекта, согласно примерному варианту осуществления. Устройство может быть применено в носимом устройстве. Как показано на Фиг.8, устройство для распознавания объекта включает в себя модуль 81 определения и модуль 82 отображения.
[00172] Модуль 81 определения выполнен с возможностью определения объекта, который должен быть распознан.
[00173] Модуль 82 отображения выполнен с возможностью, когда предварительно заданное условие удовлетворено, локализации и отчетливого отображения объекта, который должен быть распознан, который определен модулем 81 определения.
[00174] Фиг.9A является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления. На основе варианта осуществления, который показан на Фиг.8, модуль 81 определения, который показан на Фиг.9A, может включать в себя первый подмодуль 811 определения, второй подмодуль 812 определения или третий подмодуль 813 определения.
[00175] Первый подмодуль 811 определения выполнен с возможностью распознавания текущего объекта и определения объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте.
[00176] Второй подмодуль 812 определения выполнен с возможностью получения информации объекта, соответствующей параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, и определения объекта, который должен быть распознан, соответствующего параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта.
[00177] Третий подмодуль 813 определения выполнен с возможностью приема информации о целевом объекте, отправленной из устройства распознавания изображений, и определения объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте.
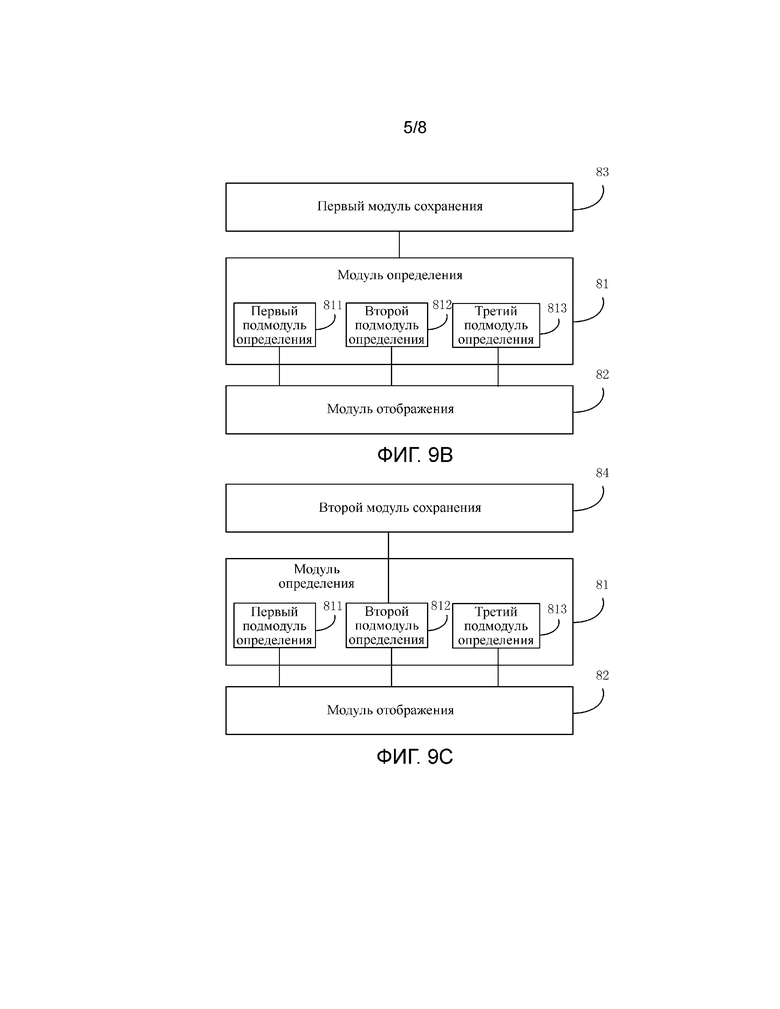
[00178] Фиг.9B является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления. На основе варианта осуществления, который показан на Фиг.9A, устройство, которое показано на Фиг. 9B, может дополнительно включать в себя первый модуль 83 сохранения.
[00179] Первый модуль 83 сохранения выполнен с возможностью, до определения модулем 81 определения объекта, который должен быть распознан, приема и сохранения таблицы взаимосвязей для сопоставления объектов, при этом таблица взаимосвязей для сопоставления объектов включает в себя соответствия между совпадающими объектами.
[00180] Фиг.9C является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления. На основе варианта осуществления, который показан на Фиг.9A, устройство, которое показано на Фиг. 9C, может дополнительно включать в себя второй модуль 84 сохранения.
[00181] Второй модуль 84 сохранения выполнен с возможностью, до получения информации объекта, соответствующей параметрам времени и/или размещения, вторым подмодулем 812 определения, согласно предварительно сохраненной информации поведения, приема информации поведения, введенной пользователем, и сохранения информации поведения; или осуществления сбора информации поведения пользователя и сохранения информации поведения.
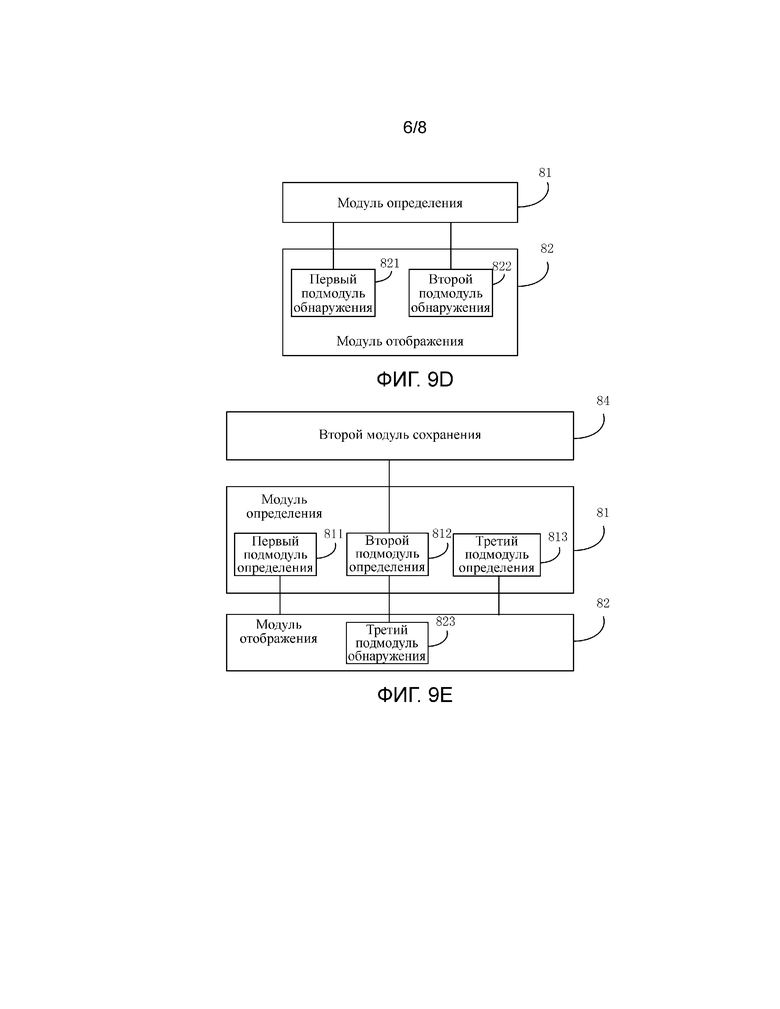
[00182] Фиг.9D является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления. На основе варианта осуществления, который показан на Фиг.8, модуль 82 отображения, который показан на Фиг.9D, включает в себя первый подмодуль 821 обнаружения или второй подмодуль 822 обнаружения.
[00183] Первый подмодуль 821 обнаружения выполнен с возможностью обнаружения, что изменение угла носимого устройства превышает предварительно заданную пороговую величину угла.
[00184] Второй подмодуль 822 обнаружения выполнен с возможностью обнаружения, что включена кнопка для отчетливого отображения на носимом устройстве.
[00185] К тому же, модуль 82 отображения, который показан на Фиг.9A, может также включать в себя первый подмодуль 821 обнаружения или второй подмодуль 822 обнаружения, которые не показаны на чертеже.
[00186] Фиг.9E является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления. На основе варианта осуществления, который показан на Фиг.9C, модуль 82 отображения, который показан на Фиг.9E, может включать в себя третий подмодуль 823 обнаружения.
[00187] Третий подмодуль 823 обнаружения выполнен с возможностью обнаружения, что текущее время достигает времени, записанного в предварительно сохраненной информации поведения; и/или обнаружения, что текущее размещение соответствует размещению, записанному в предварительно сохраненной информации поведения.
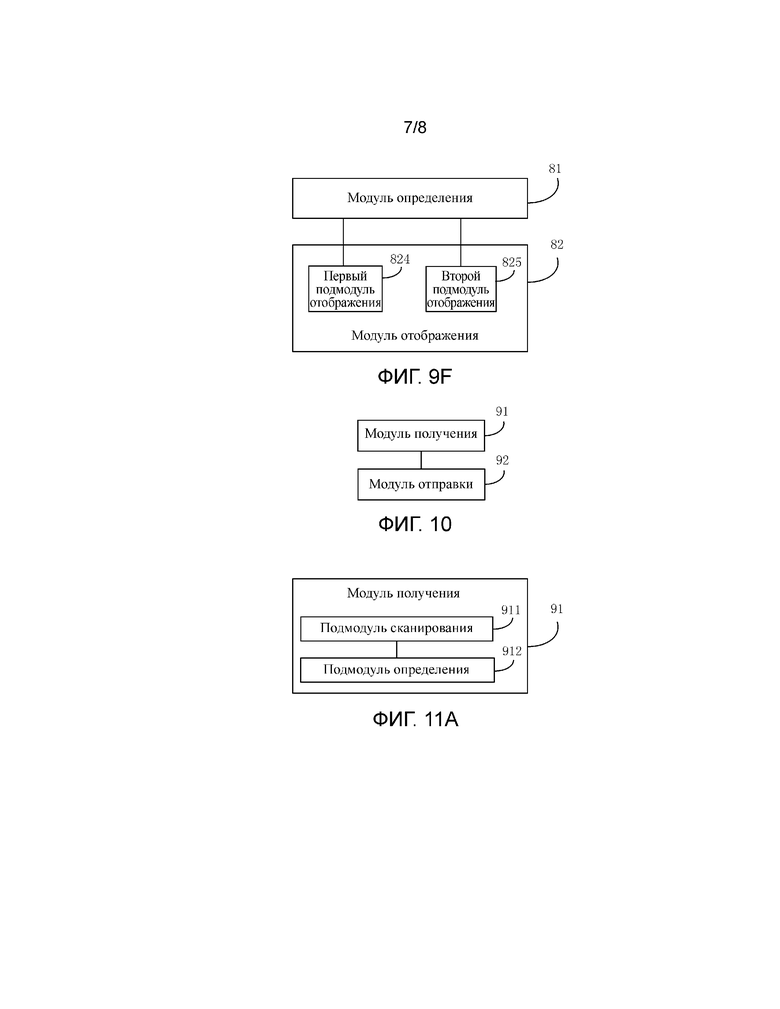
[00188] Фиг.9F является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления. На основе варианта осуществления, который показан на Фиг.8, модуль 82 отображения, который показан на Фиг.9F, может включать в себя первый подмодуль 824 отображения или второй подмодуль 825 отображения.
[00189] Первый подмодуль 824 отображения выполнен с возможностью отображения объекта, который должен быть распознан, с помощью увеличенной части или всего объекта.
[00190] Второй подмодуль 825 отображения выполнен с возможностью осуществления мигания объекта, который должен быть распознан.
[00191] Фиг.10 является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления. Как показано на Фиг.10, устройство для распознавания объекта включает в себя модуль 91 получения и модуль 92 отправки.
[00192] Модуль 91 получения выполнен с возможностью получения информации о целевом объекте.
[00193] Модуль 92 отправки выполнен с возможностью отправки информации о целевом объекте, полученной модулем получения, на носимое устройство, так чтобы носимое устройство определило объект, который должен быть распознан, согласно информации о целевом объекте, локализовало объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отобразило объект, который должен быть распознан.
[00194] Фиг.11A является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления. На основе варианта осуществления, который показан на Фиг.10, модуль 91 получения, который показан на Фиг.11A, включает в себя подмодуль 911 сканирования и подмодуль 912 определения.
[00195] Подмодуль 911 сканирования выполнен с возможностью сканирования информации объекта в пределах текущего диапазона обзора.
[00196] Подмодуль 912 определения выполнен с возможностью определения, находится ли информация объекта, просканированная подмодулем 911 сканирования, в предварительно сохраненной таблице информации целевого объекта, и если просканированная информация объекта находится в предварительно сохраненной таблице информации целевого объекта, определения, что просканированная информация объекта является информацией о целевом объекте.
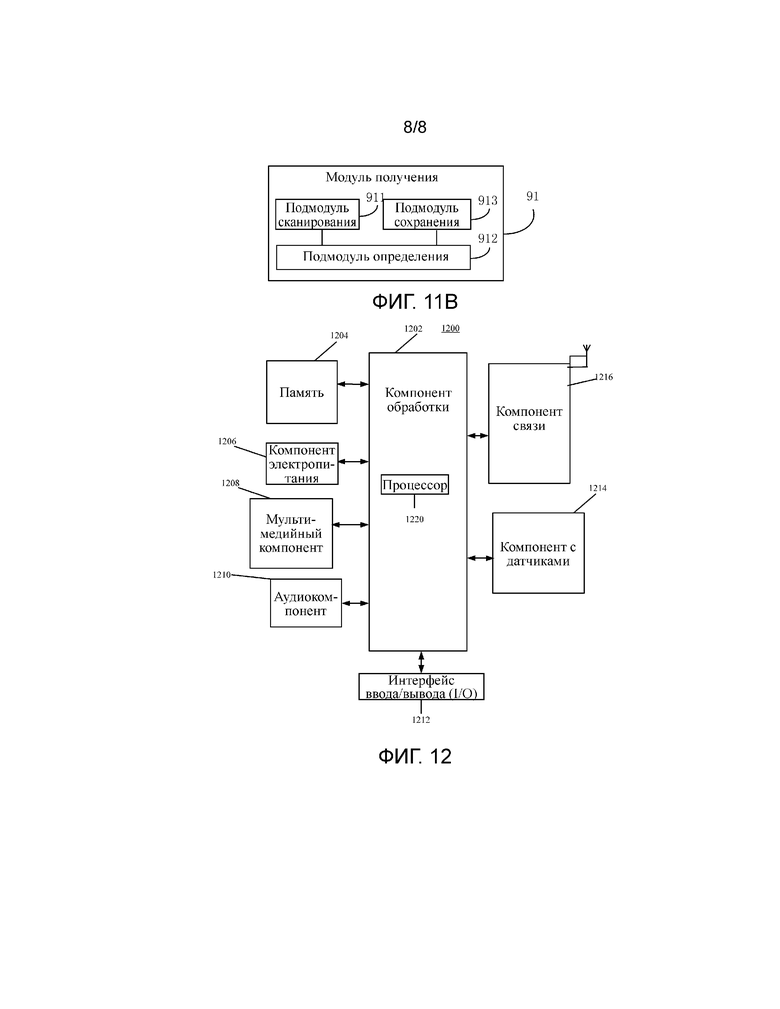
[00197] Фиг.11B является блок-схемой, показывающей другое устройство для распознавания объекта, согласно примерному варианту осуществления. На основе варианта осуществления, который показан на Фиг.11A, модуль 91 получения, который показан на Фиг.11B, может дополнительно включать в себя подмодуль 913 сохранения.
[00198] Подмодуль 913 сохранения выполнен с возможностью, до определения подмодулем 912 определения, находится ли просканированная информация объекта в предварительно сохраненной таблице информации целевого объекта, приема и сохранения таблицы информации целевого объекта, при этом таблица информации целевого объекта включает в себя информацию объекта, совпадающего с объектом, который должен быть распознан.
[00199] Относительно устройств в вышеуказанных вариантах осуществления, конкретные образы действий для выполнения операций для отдельных модулей/подмодулей в них были описаны подробно в вариантах осуществления касательно способов, которые не будут разъяснены в настоящем документе.
[00200] Фиг.12 является блок-схемой, показывающей структуру, применимую в устройстве для распознавания объекта, согласно примерному варианту осуществления. Например, устройством 1200 может быть мобильный телефон, компьютер, терминал цифрового вещания, устройство передачи сообщений, игровая консоль, планшетный компьютер, медицинское устройство, тренажерное оборудование, персональный цифровой помощник, интеллектуальные очки или камера и подобные.
[00201] Обращаясь к Фиг.12, устройство 1200 может включать в себя один или более из нижеследующих компонентов: компонент 1202 обработки, память 1204, компонент 1206 электропитания, мультимедийный компонент 1208, аудиокомпонент 1210, интерфейс 1212 ввода/вывода (I/O), компонент 1214 с датчиками и компонент 1216 связи.
[00202] Компонент 1202 обработки обычно управляет общими операциями устройства 1200, такими как операции, ассоциированные с отображением, телефонные вызовы, передача данных, операции камеры, и операции записи. Компонент 1202 обработки может включать в себя один или более процессоров 1220 для исполнения инструкций для выполнения всех или части этапов в вышеописанных способах. Более того, компонент 1202 обработки может включать в себя один или более модулей, которые способствуют взаимодействию между компонентом 1202 обработки и другими компонентами. Например, компонент 1202 обработки может включать в себя мультимедийный модуль для способствования взаимодействию между мультимедийным компонентом 1208 и компонентом 1202 обработки.
[00203] Память 1204 выполнена с возможностью хранения различных типов данных для поддержки функционирования устройства 1200. Примеры таких данных включают в себя инструкции для любых приложений или способов, функционирующих на устройстве 1200, контактные данные, данные телефонной книги, сообщения, картинки, видео, и т.д. Память 1204 может быть реализована с использованием любого типа устройств энергозависимой или энергонезависимой памяти, или их комбинации, таких как статичная оперативная память (SRAM), электрически стираемая программируемая постоянная память (EEPROM)(EEPROM), электрически программируемая постоянная память (EPROM), программируемая постоянная память (PROM), постоянная память (ROM), магнитная память, flash-память, магнитный или оптический диск.
[00204] Компонент 1206 электропитания предоставляет электропитание различным компонентам устройства 1200. Компонент 1206 электропитания может включать в себя систему управления электропитанием, один или более источников электропитания, и любые другие компоненты, ассоциированные с генерированием, управлением, и распределением электропитания в устройстве 1200.
[00205] Мультимедийный компонент 1208 включает в себя экран, предоставляющий интерфейс вывода между устройством 1200 и пользователем. В некоторых вариантах осуществления, экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель включает в себя один или более датчиков касания для считывания касаний, движений пальцем, и жестов на сенсорной панели. Датчики касания могут не только считывать границу действия касания или движения пальцем, но также считывают период времени и давление, ассоциированные с действием касания или движения пальцем. В некоторых вариантах осуществления, мультимедийный компонент 1208 включает в себя переднюю камеру и/или заднюю камеру. Передняя камера и задняя камера могут принимать внешние мультимедийные данные пока устройство 1200 находится в режиме функционирования, таком как режим фотографии или видеорежим. Каждая из передней камеры и задней камеры может быть системой с фиксированными оптическими линзами или иметь возможность изменения фокуса и оптического приближения.
[00206] Аудиокомпонент 1210 выполнен с возможностью вывода и/или ввода аудиосигналов. Например, аудиокомпонент 1210 включает в себя микрофон ("MIC"), выполненный с возможностью приема внешнего аудиосигнала, когда устройство 1200 находится в режиме функционирования, таком как режим вызова, режим записи, и режим распознавания голоса. Принятый аудиосигнал может быть дополнительно сохранен в памяти 1204 или передан посредством компонента 1216 связи. В некоторых вариантах осуществления, аудиокомпонент 1210 дополнительно включает в себя динамик для вывода аудиосигналов.
[00207] Интерфейс 1212 I/O предоставляет интерфейс между компонентом 1202 обработки и модулями периферийного интерфейса, такими как клавиатура, колесо мыши, кнопки, и подобные. Кнопки могут включать в себя, но не ограничены этим, кнопку "домой", кнопку громкости, кнопку запуска и кнопку блокировки.
[00208] Компонент 1214 с датчиками включает в себя один или более датчиков для предоставления оценок статуса различных аспектов устройства 1200. Например, компонент 1214 с датчиками может обнаружить статус "открыт/закрыт" для устройства 1200, взаимное расположение компонентов, например, дисплея и клавиатуры устройства 1200, изменение в расположении устройства 1200 или компонента устройства 1200, присутствие или отсутствие контакта пользователя с устройством 1200, ориентацию или ускорение/замедление устройства 1200, и изменение температуры устройства 1200. Компонент 1214 с датчиками может включать в себя датчик приближения, выполненный с возможностью обнаружения приближения ближайших объектов без какого-либо физического контакта. Компонент 1214 с датчиками может также включать в себя датчик света, такой как CMOS или CCD-датчик изображения, для использования в приложениях визуализации. В некоторых вариантах осуществления, компонент 1214 с датчиками может также включать в себя датчик акселерометра, датчик гироскопа, магнитный датчик, датчик давления, или датчик температуры.
[00209] Компонент 1216 связи выполнен с возможностью способствования связи, проводным или беспроводным образом, между устройством 1200 и другими устройствами. Устройство 1200 может осуществить доступ к беспроводной сети на основе стандарта связи, такого как WiFi, 2G, или 3G, или их комбинации. В одном примерном варианте осуществления, компонент 1216 связи принимает широковещательный сигнал или информацию, ассоциированную с широковещательной передачей, из внешней системы управления широковещательной передачей посредством широковещательного канала. В одном примерном варианте осуществления, компонент 1216 связи дополнительно включает в себя модуль связи в ближнем поле (NFC) для способствования связи ближнего действия. Например, NFC-модуль может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии Ассоциации по инфракрасной передаче данных (IrDA), сверхширокополосной (UWB) технологии, технологии Bluetooth (ВТ) и других технологий.
[00210] В примерных вариантах осуществления, устройство 1200 может быть реализовано с использованием одной или более специализированных интегральных схем (ASIC), процессоров цифровой обработки сигналов (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, для выполнения вышеописанных способов.
[00211] В примерных вариантах осуществления, также предусматривается некратковременный компьютерно-читаемый носитель информации, включающий в себя инструкции, такие как включенные в память 1204, исполняемые процессором 1220 устройстве 1200, для выполнения вышеописанных способов. Например, некратковременным компьютерно-читаемым носителем информации может быть ROM, RAM, CD-ROM, магнитная пленка, флоппи-диск, устройство оптического накопителя, и подобные.
[00212] Другие варианты осуществления данного изобретения будут понятны специалистам в данной области техники в результате рассмотрения данного описания и практического применения данного изобретения, раскрытого здесь. Эта заявка предназначена для охвата любых вариаций, использований, или адаптаций данного изобретения, следуя основным его принципам, и включая такие отступления от настоящего раскрытия, которые идут в рамках известной или обычной практики в данной области техники. Предполагается, что описание и примеры рассматриваются только как примерные в пределах подлинного объема и сущности данного изобретения, указанных нижеследующей формулой изобретения.
[00213] Будет понятно, что настоящее изобретение не ограничено точной конструкцией, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что различные модификации и изменения могут быть сделаны без отступления от их объема. Предполагается что объем данного изобретения ограничен только формулой изобретения.
Изобретение относится к области распознавания объекта. Техническим результатом является повышение точности распознавания объекта. Способ содержит этапы, на которых: определяют объект, который должен быть распознан; и когда предварительно заданное условие удовлетворено, локализуют и отчетливо отображают объект, который должен быть распознан; распознают текущий объект и определяют объект, который должен быть распознан; или получают информацию объекта, соответствующую параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения; или принимают информацию о целевом объекте, отправленную из устройства распознавания изображений; способ дополнительно содержит этапы, на которых: принимают информацию поведения, введенную пользователем, и сохраняют информацию поведения; или автоматически записывают информацию поведения пользователя посредством синхронизации по времени, GPS-размещения или распознавания изображения, и сохраняют информацию поведения; на этапе распознавания одновременно распознают множество объектов. 6 н. и 12 з.п. ф-лы, 18 ил.
1. Способ распознавания объекта, в котором способ применяется в носимом устройстве и содержит этапы, на которых:
определяют объект, который должен быть распознан; и
когда предварительно заданное условие удовлетворено, локализуют и отчетливо отображают объект, который должен быть распознан
причем этап, на котором определяют объект, который должен быть распознан, содержит этапы, на которых:
распознают текущий объект и определяют объект, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте; или
получают информацию объекта, соответствующую параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, и определяют объект, который должен быть распознан, соответствующий параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта; или
принимают информацию о целевом объекте, отправленную из устройства распознавания изображений, и определяют объект, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте;
причем перед этапом, на котором получают информацию объекта, соответствующую параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, способ дополнительно содержит этапы, на которых:
принимают информацию поведения, введенную пользователем, и сохраняют информацию поведения; или
автоматически записывают информацию поведения пользователя посредством синхронизации по времени, GPS-размещения или распознавания изображения, и сохраняют информацию поведения;
причем на этапе распознавания одновременно распознают множество объектов.
2. Способ распознавания объекта по п.1, в котором до этапа, на котором определяют объект, который должен быть распознан, способ дополнительно содержит этап, на котором:
принимают и сохраняют таблицу взаимосвязей для сопоставления объектов, при этом таблица взаимосвязей для сопоставления объектов содержит соответствия между совпадающими объектами.
3. Способ распознавания объекта по п.1, в котором удовлетворение предварительно заданного условия содержит:
обнаружение, что изменение угла носимого устройства превышает предварительно заданную пороговую величину угла; или
обнаружение, что включена кнопка для отчетливого отображения на носимом устройстве.
4. Способ распознавания объекта по п.1, в котором удовлетворение предварительно заданного условия содержит:
обнаружение, что текущее время достигает времени, записанного в предварительно сохраненной информации поведения; и/или
обнаружение, что текущее размещение соответствует размещению, записанному в предварительно сохраненной информации поведения.
5. Способ распознавания объекта по п.1, в котором этап, на котором отчетливо отображают объект, который должен быть распознан, содержит этапы, на которых:
отображают объект, который должен быть распознан, с помощью увеличенной части или всего объекта; или
осуществляют мигание объекта, который должен быть распознан.
6. Способ распознавания объекта, содержащий этапы, на которых:
получают информацию о целевом объекте; и
отправляют информацию о целевом объекте на носимое устройство, так что носимое устройство распознает текущий объект и определяет объект, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте; или принимает информацию поведения, введенную пользователем, и сохраняет информацию поведения; или автоматически записывает информацию поведения пользователя посредством синхронизации по времени, GPS-размещения или распознавания изображения, и сохраняет информацию поведения; получает информацию объекта, соответствующую параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, и определяет объект, который должен быть распознан, соответствующий параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта; или принимает информацию о целевом объекте, отправленную из устройства распознавания изображений, и определяет объект, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте; локализует объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отображает объект, который должен быть распознан; причем при распознавании одновременно распознают множество объектов.
7. Способ распознавания объекта по п.6, в котором этап, на котором получают информацию о целевом объекте, содержит этапы, на которых:
сканируют информацию объекта в пределах текущего диапазона обзора; и
определяют, находится ли просканированная информация объекта в предварительно сохраненной таблице информации целевого объекта, и если просканированная информация объекта находится в предварительно сохраненной таблице информации целевого объекта, определяют, что просканированная информация объекта является информацией о целевом объекте.
8. Способ распознавания объекта по п.7, в котором перед этапом, на котором определяют, находится ли просканированная информация объекта в предварительно сохраненной таблице информации целевого объекта, причем способ дополнительно содержит этап, на котором:
принимают и сохраняют таблицу информации целевого объекта, при этом таблица информации целевого объекта содержит информацию объекта, совпадающего с объектом, который должен быть распознан.
9. Устройство для распознавания объекта, при этом устройство применяется в носимом устройстве и содержит:
модуль определения, выполненный с возможностью определения объекта, который должен быть распознан; и
модуль отображения, выполненный с возможностью, когда предварительно заданное условие удовлетворено, локализации и отчетливого отображения объекта, который должен быть распознан, который определен модулем определения;
причем модуль определения содержит:
первый подмодуль определения, выполненный с возможностью распознавания текущего объекта и определения объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте; или
второй подмодуль определения, выполненный с возможностью получения информации объекта, соответствующей параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, и определения объекта, который должен быть распознан, соответствующего параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта; или
третий подмодуль определения, выполненный с возможностью приема информации о целевом объекте, отправленной из устройства распознавания изображений, и определения объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте;
второй модуль сохранения, выполненный с возможностью до получения информации объекта, соответствующей параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения приема информации поведения, введенной пользователем, и сохранения информации поведения; или автоматической записи информации поведения пользователя посредством синхронизации по времени, GPS-размещения или распознавания изображения, и сохранения информации поведения;
причем первый подмодуль определения выполнен с возможностью одновременного распознавания множества объектов.
10. Устройство для распознавания объекта по п.9, дополнительно содержащее:
первый модуль сохранения, выполненный с возможностью до определения модулем определения объекта, который должен быть распознан, приема и сохранения таблицы взаимосвязей для сопоставления объектов, при этом таблица взаимосвязей для сопоставления объектов содержит соответствия между совпадающими объектами.
11. Устройство для распознавания объекта по п.9, в котором модуль отображения содержит:
первый подмодуль обнаружения, выполненный с возможностью обнаружения, что изменение угла носимого устройства превышает предварительно заданную пороговую величину угла; или
второй подмодуль обнаружения, выполненный с возможностью обнаружения, что включена кнопка для отчетливого отображения на носимом устройстве.
12. Устройство для распознавания объекта по п.9, в котором модуль отображения содержит:
третий подмодуль обнаружения, выполненный с возможностью обнаружения, что текущее время достигает времени, записанного в предварительно сохраненной информации поведения; и/или обнаружения, что текущее размещение соответствует размещению, записанному в предварительно сохраненной информации поведения.
13. Устройство для распознавания объекта по п.9, в котором модуль отображения содержит:
первый подмодуль отображения, выполненный с возможностью отображения объекта, который должен быть распознан, с помощью увеличенной части или всего объекта; или
второй подмодуль отображения, выполненный с возможностью осуществления мигания объекта, который должен быть распознан.
14. Устройство для распознавания объекта, содержащее:
модуль получения, выполненный с возможностью получения информации о целевом объекте; и
модуль отправки, выполненный с возможностью отправки информации о целевом объекте, полученной модулем получения, на носимое устройство, так что носимое устройство распознает текущий объект и определяет объект, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте; или принимает информацию поведения, введенную пользователем, и сохраняет информацию поведения; или автоматически записывает информацию поведения пользователя посредством синхронизации по времени, GPS-размещения или распознавания изображения, и сохраняет информацию поведения; получает информацию объекта, соответствующую параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, и определяет объект, который должен быть распознан, соответствующий параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта; или принимает информацию о целевом объекте, отправленную из устройства распознавания изображений, и определяет объект, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте; локализует объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отображает объект, который должен быть распознан; причем при распознавании одновременно распознают множество объектов.
15. Устройство для распознавания объекта по п.14, в котором модуль получения содержит:
подмодуль сканирования, выполненный с возможностью сканирования информации объекта в пределах текущего диапазона обзора; и
подмодуль определения, выполненный с возможностью определения, находится ли информация объекта, просканированная подмодулем сканирования, в предварительно сохраненной таблице информации целевого объекта, и если просканированная информация объекта находится в предварительно сохраненной таблице информации целевого объекта, определения, что просканированная информация объекта является информацией о целевом объекте.
16. Устройство для распознавания объекта по п.15, в котором модуль получения дополнительно содержит:
подмодуль сохранения, выполненный с возможностью до определения подмодулем определения, находится ли просканированная информация объекта в предварительно сохраненной таблице информации целевого объекта, приема и сохранения таблицы информации целевого объекта, при этом таблица информации целевого объекта содержит информацию объекта, совпадающего с объектом, который должен быть распознан.
17. Устройство для распознавания объекта, содержащее:
процессор; и
память для хранения инструкций, исполняемых процессором;
при этом процессор выполнен с возможностью:
определения объекта, который должен быть распознан; и
когда предварительно заданное условие удовлетворено, локализации и отчетливого отображения объекта, который должен быть распознан;
распознавания текущего объекта и определения объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте; или
приема информации поведения, введенной пользователем, и сохранения информации поведения; или
автоматической записи информации поведения пользователя посредством синхронизации по времени, GPS-размещения или распознавания изображения, и сохранения информации поведения;
получения информации объекта, соответствующей параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения и определения объекта, который должен быть распознан, соответствующего параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта; или
приема информации о целевом объекте, отправленной из устройства распознавания изображений, и определения объекта, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте;
причем на этапе распознавания одновременно распознают множество объектов.
18. Устройство для распознавания объекта, содержащее:
процессор; и
память для хранения инструкций, исполняемых процессором;
при этом процессор выполнен с возможностью:
получения информации о целевом объекте; и
отправки информации о целевом объекте на носимое устройство, так что носимое устройство распознает текущий объект и определяет объект, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о текущем объекте; или принимает информацию поведения, введенную пользователем, и сохраняет информацию поведения; или автоматически записывает информацию поведения пользователя посредством синхронизации по времени, GPS-размещения или распознавания изображения, и сохраняет информацию поведения; получает информацию объекта, соответствующую параметрам времени и/или размещения, согласно предварительно сохраненной информации поведения, и определяет объект, который должен быть распознан, соответствующий параметрам времени и/или размещения, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации объекта; или принимает информацию о целевом объекте, отправленную из устройства распознавания изображений, и определяет объект, который должен быть распознан, посредством осуществления опроса предварительно сохраненной таблицы взаимосвязей для сопоставления объектов согласно информации о целевом объекте; локализует объект, который должен быть распознан, когда удовлетворено предварительно заданное условие, и отчетливо отображает объект, который должен быть распознан; причем при распознавании одновременно распознают множество объектов.
| US 20130050258 A1, 28.02.2013 | |||
| УСТРОЙСТВО ПЫЛЕОТДЕЛЕНИЯ ПЫЛЕСОСА | 2008 |
|
RU2428915C1 |
| "How to Locate Your Misplaced iPhone Using the Apple Watch", (Video) iClarified, 07.05.2015 | |||
| СПОСОБЫ ОПРЕДЕЛЕНИЯ ПРИБЛИЖЕННОГО МЕСТОПОЛОЖЕНИЯ УСТРОЙСТВА НА ОСНОВАНИИ ВНЕШНИХ СИГНАЛОВ | 2004 |
|
RU2391701C2 |

