Область техники, к которой относится изобретение
Настоящее изобретение относится к системам привода и управления для подъемных ворот, в частности для высокоскоростных промышленных подъемных ворот, а также к подъемным воротам с такой системой привода и управления.
Уровень техники
Подъемные ворота являются известными, например, из DE 4015214 A1, где раскрыты подъемные ворота с реечной арматурой и электрическим приводным двигателем. Такие подъемные ворота содержат две направляющие, которые установлены с двух противоположных сторон проема ворот, реечную арматуру, рейки которой установлены на петлях, расположенных на расстоянии друг от друга таким образом, чтобы оси петель находились в промежутке между соседними рейками. Указано также, что эти подъемные ворота выполнены в виде промышленных подъемных ворот, имея в виду высокоскоростные ворота. Такие подъемные ворота имеют конструкцию плоских колесных ворот или спиральных ворот, которые закрывают или открывают проем для прохода людей или проезда транспортных средств.
Для ворот, полотно которых должно перемещаться вертикально с целью открытия проема для проезда или прохода, существует опасность, которую нельзя исключить и которая заключается в том, что в случае неисправности следящего или исполнительного элемента полотно ворот под действием силы тяжести обрушится неконтролируемым и опасным образом. Эта опасность является тем большей, чем быстрее перемещается полотно ворот при нормальной эксплуатации. У так называемых высокоскоростных ворот скорость движения полотна может достигать 4 м/с, в то время как полотно обычных промышленных подъемных ворот обычно перемещается со скоростями 0,2-0,3 м/с.
Сложные меры принимаются для минимизации опасности, создаваемой таким воротами.
Одной из общих мер является уравновешивание веса полотна ворот при помощи противовесов или уравновешивающих пружин, чтобы создать противовесную систему, которая идеально обеспечивает уравновешивание полотна ворот в каждой его позиции, исключая, таким образом, опасную инерционность.
Однако, как показывает практика, равномерное уравновешивание невозможно осуществить во всех позициях полотна ворот и в течение всего срока службы. Так, например, при натяжении пружины ее характеристика изменяется со временем, поэтому невозможно гарантировать требуемый уравновешивающий момент в течение длительной эксплуатации.
Известны также предохранительные устройства центробежного срабатывания, которые реагируют на увеличение скорости опускания полотна ворот. Однако центробежное срабатывание происходит относительно медленно и может быть использовано только для низких скоростей закрытия. При высоких скоростях закрытия задержка остановки полотна ворот является опасной, а нагрузка на механические компоненты - относительно высокой.
То же самое относится к, так называемым, защитным устройствам разрыва передачи, которые устроены таким образом, что при потере механической передачи между отдельными зубчатыми элементами зажимное устройство останавливает главное зубчатое колесо передачи.
Для известных подъемных ворот используются асинхронные двигатели с червячными, коническими и прямозубыми цилиндрическими передачами в сочетании с механическими тормозами. Эти передачи и тормоза постоянно подвергаются износу. Напряжения возникают не только при нормальной эксплуатации ворот, но больше всего в результате экстренных мер, принимаемых в случае опасности, в частности защитного реверса или аварийной остановки. Защитные реверсы, приводимые в действие предохранительными датчиками, в частности ограждающими планками или световым защитным ограждением, требуются для того, чтобы в течение минимально возможного времени остановить полотно ворот, а затем изменить направление его движения с целью ограничения контактного усилия на части человеческого тела. Аварийная остановка приводит к остановке в кратчайшее время. Отключение электропитания вызывает мгновенную аварийную остановку.
Как поясняется выше, отключение электропитания для традиционной конструкции ворот представляет собой ситуацию, которая создает максимальные нагрузки на передачу привода ворот и стопорный тормоз. Мощность привода сразу пропадает, при этом тормоз, действующий по принципу короткого замыкания, мгновенно срабатывает и должен поглощать не только силы тяжести, но и кинетическую энергию массы полотна ворот. Нагрузки на шестерни и оси, а также на другие части опорной системы увеличивается пропорционально квадрату скорости закрытия.
Тормоза обычно присоединяются к валу двигателя, чтобы обеспечить удержание полотна ворот на месте после выключения привода. Эти тормоза, действующие по принципу короткого замыкания, подвергаются высоким нагрузкам, в частности в случае отключения электропитания, поскольку они должны мгновенно и неуправляемо поглощать кинетическую энергию веса полотна ворот. Сложность конструкции таких безопасных механических тормозов, которые позволяют также справляться с отключением электропитания, является, соответственно, высокой.
Кроме того, тормозной эффект таких тормозов зависит от нескольких факторов, в частности от рабочей температуры или возможного загрязнения. Обычно тормозной эффект тормозов резко уменьшается примерно при 150°C. Любые загрязнения тормозных дисков маслянистыми веществами также резко уменьшают тормозной эффект.
Диапазон регулирования асинхронных двигателей, т.е. отношение номинальной частоты вращения и минимальной частоты вращения, при которой привод еще может поддерживать номинальную скорость, ограничен. Поэтому необходимый момент силы невозможно получить при низких частотах вращения и, кроме того, необходимо учитывать время реакции тормоза, поэтому тормоза приходится активировать непосредственно перед остановкой. Возникающая при этом кинетическая энергия, которая должна поглощаться тормозом, приводит к большому износу.
Вследствие этих напряжений тормоза следует проверять по меньшей мере один раз в год и в зависимости от количества срабатываний. Эксперты по промышленной безопасности рекомендуют безусловно заменять тормоза не позднее чем после 2,000 срабатываний при полной нагрузке, вызванных аварийными остановками или отключениями электропитания.
Для открытия ворот, в том числе после отключения электропитания, используемые электромеханические стопорные тормоза оснащены соответствующими устройствами с ручным управлением, в частности тросовыми лебедками, коленчатыми рычагами или ручными цепями, применение которых устраняет действие стопорного тормоза. При этом полотно ворот может подниматься под действием противовесного устройства, отжиматься вверх или сворачиваться вверх при помощи коленчатого рычага или ручной цепи.
Как правило, асинхронные двигатели используются на воротах с применением преобразователей частоты, которые позволяют перемещать полотно ворот с наиболее равномерным ускорением. Во время движения вниз, вызываемого силой тяжести, или во время реверсивных операций полотна ворот двигатель работает в режиме генератора. Преобразователи частоты обычно требуют наличия так называемого резистора для динамического торможения генератора, в котором эта регенеративная энергия расходуется, т.е. превращается в тепловую энергию.
Раскрытие изобретения
Задача настоящего изобретения заключается в том, чтобы устранить указанные недостатки и обеспечить усовершенствованную систему привода и управления для подъемных ворот с целью уменьшения опасности обрушения и напряжений на шестернях, осях, тормозах и противовесных устройствах.
Эта задача решена при помощи системы с признаками, указанными в независимом пункте формулы изобретения. Предпочтительные варианты осуществления представлены в зависимых пунктах формулы изобретения. Особый подход настоящего изобретения состоит в том, чтобы заменить асинхронный двигатель с присоединенным тормозом, обычно используемый в качестве привода, на двигатель, применение с которым соответствующих управляющих и регулирующих устройств позволяет замедлять движение полотна подъемных ворот при помощи приводного двигателя до нулевой скорости и удерживать его при остановке в этой позиции.
Согласно первому аспекту настоящего изобретения обеспечена система привода для подъемных ворот с вертикальным перемещением полотна ворот. Данная система привода содержит приводной двигатель, установленный с возможностью подключения к полотну ворот и предназначенный для вертикального перемещения полотна ворот, и систему управления для приведения в действие приводного двигателя. Приводная система отличается тем, что частота вращения приводного двигателя может быть уменьшена до нулевой величины, при этом блок управления при возникновении условий аварийной остановки обеспечивает управление приводным двигателем с контролируемым уменьшением частоты его вращения и с обеспечением торможения движения полотна ворот приводным двигателем, при этом приводной двигатель обеспечивает достаточный крутящий момент при нулевой частоте вращения для удерживания полотна ворот в текущей позиции, при этом система управления обеспечивает выполнение указанных действий также во время отключения электропитания.
Согласно второму аспекту настоящего изобретения подъемные ворота содержат полотно, установленное с возможностью вертикального перемещения, и приводную систему согласно первому аспекту изобретения.
Приводной двигатель может быть предпочтительно соединен с полотном ворот непосредственно, т.е. без передаточного механизма. Это позволяет исключить из конструкции комплекс элементов передаточного механизма, имеющих тенденцию к износу и возникновению дефектов.
Приводной двигатель может быть предпочтительно выполнен в виде синхронного двигателя. Синхронные двигатели характеризуются чрезвычайно хорошей управляемостью и прочностью. Они создают высокие крутящие моменты при малых размерах и могут быть использованы без передаточных механизмов, поскольку их крутящий момент является достаточным для веса обычного полотна ворот.
Кроме того, синхронные двигатели, в отличие от обычно применяемых асинхронных двигателей, могут работать в режиме управления током, поэтому управляемое функционирование осуществляется до нулевой частоты вращения и даже при остановке (нулевая частота вращения) может быть генерирован достаточно высокий крутящий момент, чтобы удерживать полотно ворот в остановленной позиции, противодействуя силе тяжести.
В другом предпочтительном варианте осуществления приводная система содержит также накопитель электрической энергии, предпочтительно - в виде блока аккумуляторов, который предназначен для подачи электрической энергии на приводной двигатель и блок управления в случае отключения электропитания. Блок управления предпочтительно может быть сконфигурирован с возможностью определения состояния отключения электропитания и оценки указанного состояния как аварийной ситуации, с тем чтобы обеспечить возможность уменьшения скорости двигателя в случае отключения электропитания и удерживания полотна ворот в остановленном положении. При этом можно обойтись без противовеса для полотна ворот.
Синхронный привод может быть сконфигурирован с возможностью перемещения полотна ворот даже без применения противовесной системы. В то же время блок регулирования мощности синхронного привода может регенерировать свободную энергию, которая выделяется во время торможения и/или при закрытии ворот, например в перезаряжаемом блоке аккумуляторов или в блоке конденсаторов. Таким образом, можно уменьшить сложность конструкции, связанную с противовесной системой, не увеличивая нагрузку на механические опоры и не снижая безопасности системы.
Кроме того, блок управления может также обеспечивать аварийное срабатывание подъемных ворот в случае отключения электропитания, в частности, срабатывание приводного двигателя для экстренного открытия подъемных ворот. Такое аварийное срабатывание осуществляется при помощи накопителя электрической энергии.
Приводная система может также предпочтительно содержать блок регулирования мощности, предназначенный для приведения в действие приводного двигателя, при этом указанный блок регулирования мощности обеспечивает регенерацию электрической энергии, генерируемой во время замедления движения полотна ворот под действием приводного двигателя, и заряжает накопитель электрической энергии этой регенерированной энергией. Таким образом, привод подъемных ворот можно осуществлять с чрезвычайно низким энергопотреблением, что может быть важным в особенности во время аварийных срабатываний при помощи аккумуляторов.
Блок управления предпочтительно может быть также выполнен с возможностью определения фактического значения на основе сигнала, поступающего от датчика положения, показывающего позицию или изменение позиции подъемных ворот, и с возможностью запуска приводного двигателя исходя из сравнения фактического значения с базовым значением. Таким образом, можно обеспечить точное регулирование перемещения полотна ворот. Исходя из сравнения базового значения с фактическим значением реакция в случае их отклонения происходит в виде прерывания перемещения.
В другом предпочтительном варианте осуществления блок управления может осуществлять контроль остаточного заряда аккумулятора и при достижении заданного нижнего порогового значения, используя оставшуюся энергию, устанавливать полотно ворот в безопасное положение, исключающее обрушение. Эту энергию может поставлять также другой блок аккумуляторов, предусмотренный в качестве резервной защиты. В альтернативном варианте осуществления функцию резервной защиты может выполнять механический тормоз. В том случае, когда полотно ворот остается в остановленном положении в течение длительного времени, в целях экономии энергии тормоз может быть включен для активирования.
При помощи показаний датчика положения можно проверять, сохраняется ли позиция остановки постоянной. Если оказывается, что позиция остановки не сохраняется, то приводной двигатель снова включается для восстановления позиции остановки при нулевой частоте вращения или для перемещения в безопасную позицию, исключающую обрушение. В этом случае может также выводиться сообщение о необходимости проведения контроля и ремонта тормозов.
Краткое описание чертежей
Ниже приведено описание изобретения со ссылками на прилагаемые чертежи, на которых показаны:
фиг. 1 - схематическая конфигурация подъемных ворот согласно одному варианту осуществления настоящего изобретения,
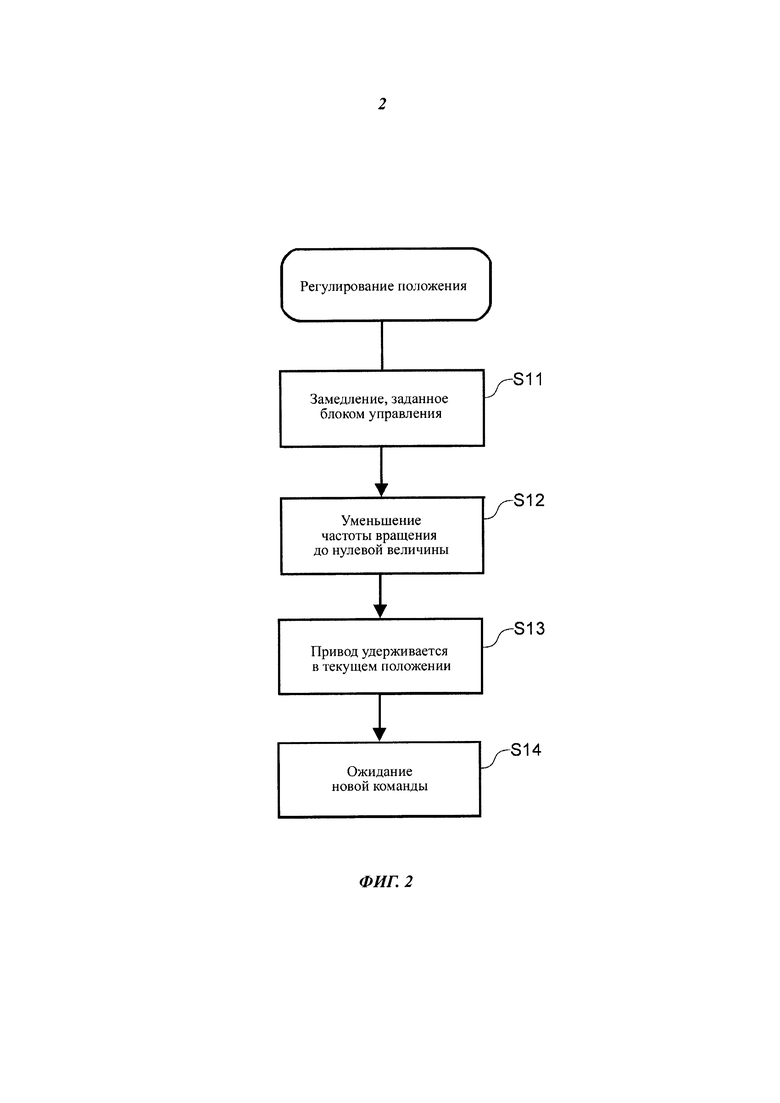
фиг. 2 - схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1,
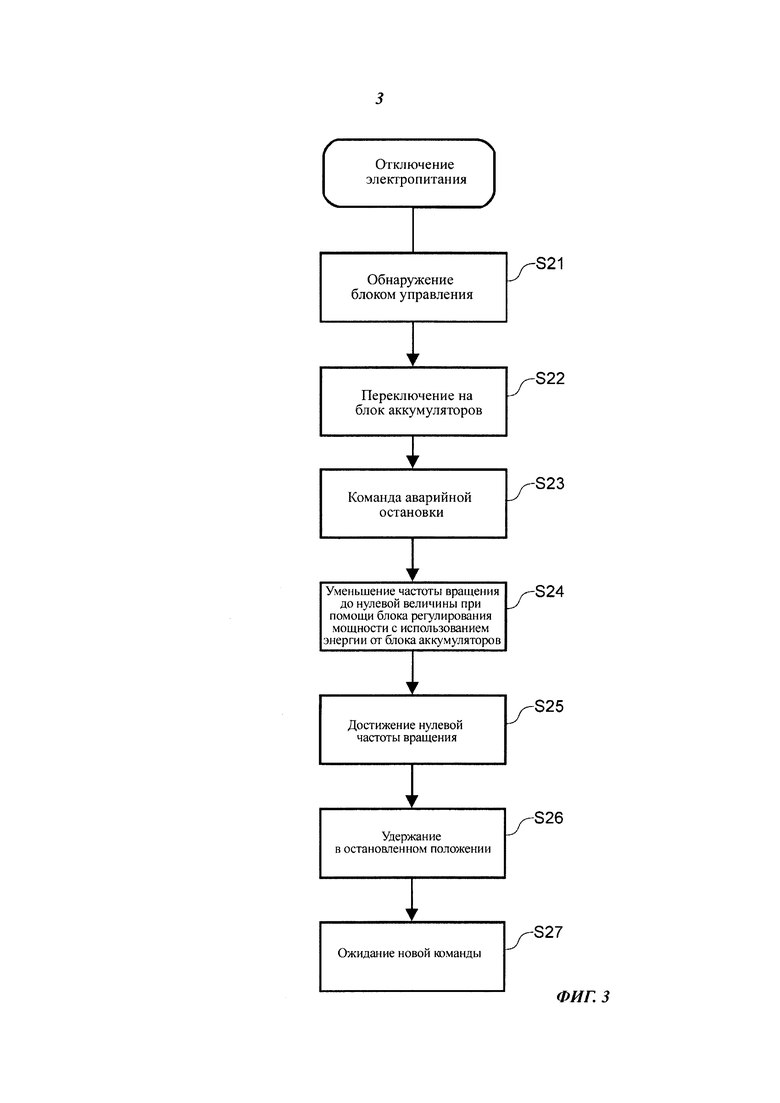
фиг. 3 - схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1 в случае отключения электропитания,
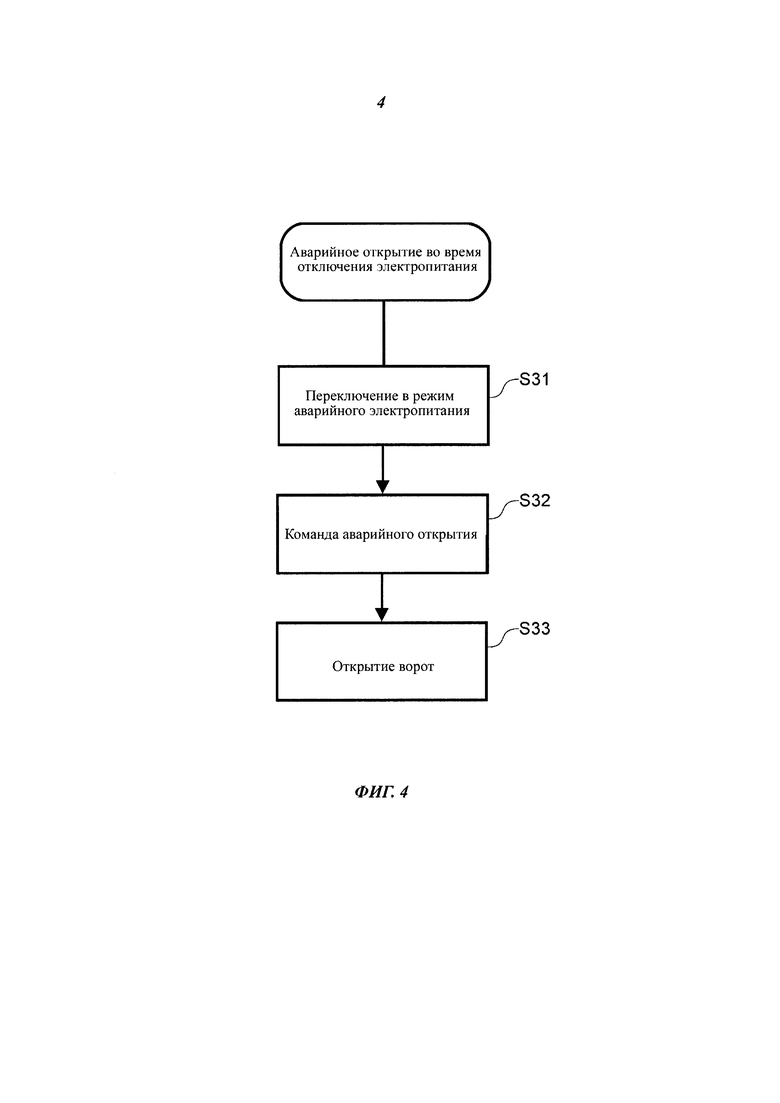
фиг. 4 - схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1 в случае аварийного открытия ворот,
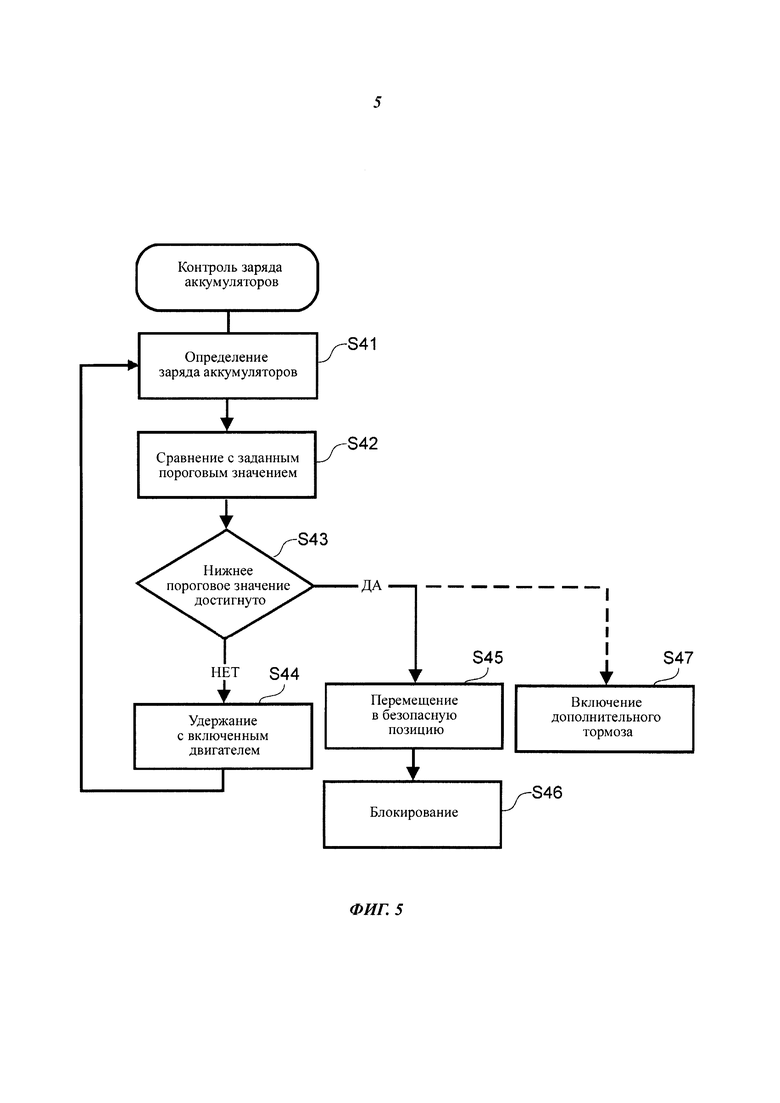
фиг. 5 - схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1 при контроле остаточного заряда аккумулятора, и
фиг. 6 - схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1 при непрерывном контроле позиции и/или скорости приводного двигателя или полотна ворот, соответственно.
Осуществление изобретения
В системе привода и управления для подъемных ворот согласно изобретению обычно используемая комбинация асинхронного двигателя с зубчатым механизмом и механически нагружаемым тормозом заменяется электрическим двигателем, предпочтительно выполненным в виде синхронного двигателя, который обычно соединяется с полотном ворот непосредственно и без какого-либо сложного передаточного механизма. Блок управления снабжен соответствующим блоком регулирования мощности для приведения в действие двигателя. Двигатель предназначен как для перемещения полотна ворот во время нормальной эксплуатации, так и для обеспечения торможения полотна ворот в течение минимально возможного времени в случае аварийной остановки и удержания его в текущей позиции.
Таким образом, исключается опасность обрушения вследствие поломки передаточного механизма, применяемого в традиционных приводах, а также дополнительная сложность, связанная с защитой от неисправности традиционного передаточного механизма.
Тормозные устройства, подверженные износу в традиционных приводах, можно полностью исключить или заменить тормозами, которые имеют менее сложную конструкцию или уменьшенную мощность.
Кроме того, полотно ворот можно также удерживать на месте без применения механических стопорных устройств. Однако при этом не исключается возможность использования механического стопорного устройства после временного удержания полотна ворот двигателем.
На фиг. 1 показано схематическое изображение подъемных ворот согласно варианту осуществления настоящего изобретения. При этом показаны ворота 1 с силовым приводом и вертикальным перемещением полотна 2, на которое действует сила тяжести и которое перемещается вверх и вниз синхронным двигателем 3 при помощи вала 4. Приводом управляет блок 5 регулирования мощности, который, как описано выше, позволяет управлять остановкой двигателя.
Логический и управляющий блок 6 генерирует команды управления для блока регулирования мощности на основании сигналов, поступающих от датчика командных сигналов, и координирует режимы работы блока регулирования мощности с другими элементами системы управления.
Вместо показанного здесь вала 4 по обеим сторонам от полотна ворот могут быть предусмотрены отдельные спиральные направляющие, в которые входит полотно ворот и которые не показаны на чертеже, при этом можно отказаться от традиционного вала для намотки полотна ворот.
Настоящее изобретение не ограничено применением синхронного двигателя в качестве приводного двигателя. Вместо синхронного двигателя может быть использован любой двигатель, частоту вращения которого можно регулировать до нулевого значения и который при нулевой частоте вращения также генерирует крутящий момент достаточной величины, как, например, шаговый двигатель, реактивный двигатель и т.п.
На фиг. 1 показан также блок 7 аккумуляторов, который можно заряжать регенерированной энергией. Кроме того, блок аккумуляторов можно дополнительно заряжать от внешнего источника 8 электропитания.
На фиг. 1 показан также электромеханический тормоз 9, действующий на вал привода ворот, и система 10 определения положения, которая выполнена в виде инкрементного датчика положения, датчика определения абсолютной величины или т.п. и также расположена непосредственно на валу, при этом идеально, чтобы как тормоз, так и система определения положения были выполнены как единое целое с приводом.
Привод управляется блоком управления, поэтому его частота вращения (и, следовательно, скорость перемещения полотна ворот) изменяется по предварительно заданному линейному закону. Все подвижные части имеют примерно равномерное ускорение. Поэтому механические нагрузки на валы и тормоза уменьшаются как во время регулярного перемещения полотна ворот, так во время реверсирования и аварийной остановки, и, кроме того, во время отключений электропитания.
На фиг. 2 показана схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1. В случае необходимой остановки осуществляется быстрое управление двигателем, который снижает частоту вращения до нулевой величины и удерживается в этой позиции.
На этапе S11 блок управления задает замедление, с которым должно быть заторможено движение полотна ворот. На этапе S12 в соответствии с заданным замедлением включается привод полотна ворот, чтобы уменьшить скорость до нулевой частоты вращения. При этом полотно ворот останавливается в текущей позиции (этап S13). На этапе S14 блок управления ожидает новых команд.
На фиг. 3 показана схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1 в случае отключения электропитания. Отключение электропитания определяется блоком управления на этапе S21 и интерпретируется как команда (аварийной) остановки (этап S23). Для этой цели блок управления может быть оснащен контрольным устройством, которое осуществляет непрерывный контроль подачи энергии от основного источника электропитания (т.е. сетевого электропитания) и в случае прекращения или перерыва подачи энергии от основного источника переключает на аварийный источник энергии (т.е. на блок аккумуляторов) (этап S22). Электрическая энергия, накопленная в блоке аккумуляторов, через блок регулирования мощности используется путем управляемого уменьшения скорости для остановки привода (нулевая скорость) (этап S24). После достижения полотном ворот нулевой скорости (этап S25) оно удерживается в остановленной позиции включенным приводом (этап S26). Далее на этапе S27 блок управления ожидает новых команд.
В варианте осуществления, показанном на фиг. 3, можно отказаться от сложных механических тормозов, предотвращающих обрушение полотна ворот в случае отключения электропитания. Функцию обеспечения безопасности выполняет управляемое торможение полотна ворот приводным двигателем с использованием энергии, сохраняемой в блоке аккумуляторов.
Таким образом, можно исключить потерю функции обеспечения безопасности из-за отказа механических тормозов.
На фиг. 4 показана схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1 при аварийном открытии ворот во время отключения электропитания.
Энергию, сохраняемую в блоке аккумуляторов, при отсутствии подачи энергии от внешнего источника можно использовать для того, чтобы блок регулирования мощности обеспечивал управляемое аварийное открытие ворот. Если блок управления обнаруживает отсутствие подачи энергии от внешнего источника, он может производить переключение в так называемый режим резервного электропитания (этап S31). При этом ненужные цепи отключаются в целях экономии энергии. Если на этапе S32 поступает команда выполнить аварийное открытие, то ворота открываются на этапе S33. Для этой цели на блок управления и приводной двигатель от блока аккумуляторов подается электрическая энергия, при этом обеспечиваемая мощность может быть гораздо меньшей, чем в случае внешнего источника.
Скорость в режиме резервного электропитания регулируется соответственно, поэтому емкость аккумулятора может сохраняться низкой. Программа аварийного электропитания может быть адаптирована к существующей остаточной емкости блока аккумуляторов, чтобы таким образом обеспечить предпочтительно полное открытие ворот.
Аварийное открытие может быть включено ручным нажатием пусковой кнопки, подключенной к ней системой пожарной сигнализации или автоматически во время отключения электропитания. Возможны также другие виды пусковых механизмов.
На фиг. 5 показана схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1 при контроле остаточного заряда аккумулятора.
Как указано выше, контрольно-измерительное устройство предпочтительно выполнено таким образом, чтобы контролировать величину остаточного заряда аккумулятора и, когда она падает ниже заданного нижнего порогового значения, использовать оставшуюся энергию для перемещения полотна ворот в безопасное положение. Для этой цели остаточный заряд в блоке аккумуляторов измеряется на этапе S41 и сравнивается с заданным нижним пороговым значением (этап S42). До тех пор, пока пороговое значение не достигнуто, ток двигателя сохраняется и полотно ворот удерживается в текущей позиции (этап S44). Однако при достижении нижнего порогового значения полотно ворот на этапе S45 перемещается в безопасное положение. В зависимости от конструкции это может быть полностью открытое или полностью закрытое положение. После этого подъемные ворота остаются в этом положении в нерабочем состоянии до восстановления подачи электропитания (этап S46). В качестве дополнительной меры защиты на случай отказа блока аккумуляторов может быть активирован стопорный тормоз (этап S47). Кроме того, контрольно-измерительное устройство может быть предпочтительно выполнено таким образом, чтобы перемещение полотна ворот можно было определить при помощи определения координат, при этом стопорный тормоз должен предотвращать такое перемещение, а приводной двигатель в ответ на определение такого перемещения должен включаться с нулевой частотой вращения, чтобы дополнительно удерживать полотно ворот в качестве моторного привода. Кроме того, блок управления может быть выполнен таким образом, чтобы использовать определение координат для сравнения базовой и фактической скоростей и корректировать любые отклонения в пределах системы управления или осуществлять остановку. Таким образом, можно противодействовать опасным перемещениям.
Электрическую энергию, поступающую из блока аккумуляторов, можно также использовать для дальнейшего определения координат блоком управления, который продолжает работать также во время отказа внешнего источника электропитания. Таким образом, в режиме аварийного электропитания также можно определять опасные перемещения вниз и противодействовать этим перемещениям.
На фиг. 6 показана схематическая диаграмма последовательности операций управления подъемными воротами согласно изобретению с фиг. 1 при непрерывном контроле положения и/или скорости приводного двигателя или полотна ворот, соответственно. Скорость полотна ворот можно определить на этапе S51 по изменению положения полотна ворот или привода полотна ворот, что определяется датчиками положения. На этапе S53 осуществляется ее сравнение с заданной базовой скоростью (этап S52). Если фактическая скорость и базовая скорость совпадают, продолжается процесс этапа S51. Если фактическая скорость и базовая скорость отличаются, полотно ворот может быть остановлено на этапе S54 или может быть начата аварийная остановка, как описано применительно к фиг. 2. Непрерывно контролируя положение и/или скорость приводного двигателя или полотна ворот, соответственно, можно обнаруживать опасное перемещение вниз и противодействовать ему. При этом повышаются меры безопасности, предотвращающие обрушение.
Таким образом, настоящее изобретение обеспечивает приводной блок для высокоскоростных подъемных ворот с предусмотренным приводным двигателем для перемещения полотна ворот, частоту вращения которого можно уменьшать до нулевой величины. Приводной двигатель приводится в действие блоком управления. При возникновении условия аварийной остановки приводной двигатель включается таким образом, чтобы его частота вращения уменьшалась до нулевой величины управляемым способом, при этом осуществляется торможение полотна ворот при помощи приводного двигателя. Если полотно ворот находится в остановленном положении, оно удерживается в этом положении включенным приводным двигателем при нулевой частоте вращения. В случае отключения электропитания замедление перемещения полотна ворот также обеспечивается за счет приводного двигателя благодаря наличию аварийного источника электропитания, поэтому может осуществляться аварийное открытие ворот.
| название | год | авторы | номер документа |
|---|---|---|---|
| УРАВНОВЕШИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМНЫХ ВОРОТ | 2006 |
|
RU2378476C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЕСА ПОДЪЕМНЫХ ВОРОТ С, ПО МЕНЬШЕЙ МЕРЕ, ОДНОЙ НАЖИМНОЙ ПРУЖИНОЙ | 2012 |
|
RU2640181C2 |
| ПОДЪЕМНАЯ ЖАЛЮЗИЙНАЯ ДВЕРЬ, ИМЕЮЩАЯ ЗАЩИТУ ОТ СОУДАРЕНИЯ | 2004 |
|
RU2332548C2 |
| БЫСТРОХОДНЫЕ ПРОМЫШЛЕННЫЕ ЖАЛЮЗИЙНЫЕ ВОРОТА | 2006 |
|
RU2378474C1 |
| ПОДЪЕМНЫЕ ВОРОТА | 1992 |
|
RU2005873C1 |
| ПОДЪЕМНЫЕ ВОРОТА | 1992 |
|
RU2034125C1 |
| Вертикально-подъемные ворота | 1981 |
|
SU977666A1 |
| Вертикально-подъемные ворота | 1991 |
|
SU1799975A1 |
| Подъемные ворота | 1983 |
|
SU1208166A1 |
| БЫСТРОХОДНЫЕ ПРОМЫШЛЕННЫЕ ВОРОТА С ГИБКОЙ ЗАВЕСОЙ | 2003 |
|
RU2306396C2 |


Настоящее изобретение обеспечивает приводную систему для высокоскоростных подъемных ворот с приводным двигателем, который предусмотрен для перемещения полотна ворот и частоту вращения которого можно уменьшать до нулевой величины. Приводной двигатель приводится в действие при помощи блока управления. При возникновении режима аварийной остановки приводной двигатель приводится в действие с регулируемым уменьшением частоты его вращения до нулевой величины, при этом осуществляется торможение полотна ворот при помощи приводного двигателя. Когда полотно ворот остановлено, оно удерживается в зафиксированной позиции включенным приводным двигателем при нулевой частоте вращения. Источник аварийного питания обеспечивает замедление перемещения полотна ворот при помощи приводного двигателя и возможность аварийного открытия ворот даже при отключении основного электропитания. 2 н. и 8 з.п. ф-лы, 6 ил.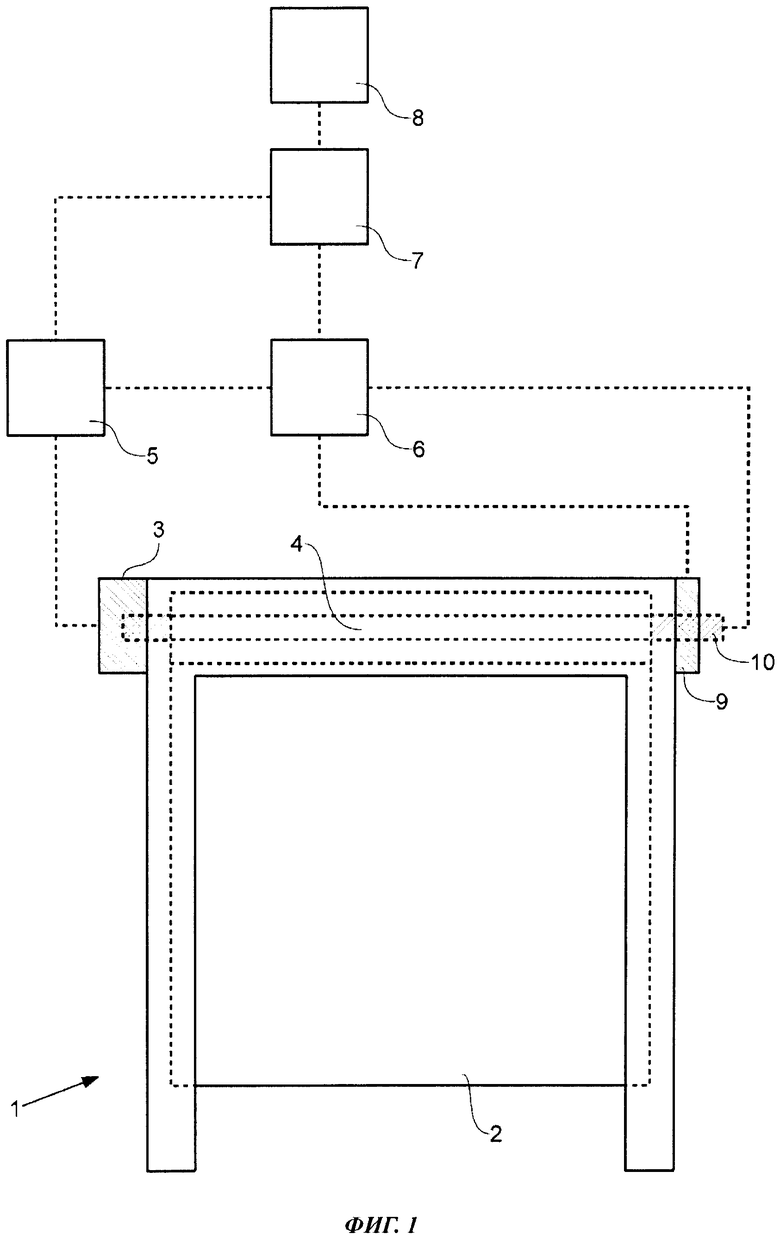
1. Система привода и управления для подъемных ворот (1) с вертикальным перемещением полотна (2), содержащая:
приводной двигатель (3), установленный с возможностью подключения к указанному полотну (2) ворот и предназначенный для вертикального перемещения указанного полотна (2) ворот,
блок (6) управления для приведения в действие приводного двигателя (3) и
блок (5) регулирования мощности для регулирования частоты вращения приводного двигателя (3),
отличающаяся тем, что обеспечена возможность регулирования приводного двигателя (3) с уменьшением частоты его вращения до нулевой величины,
при этом блок (6) управления выполнен с возможностью, при возникновении режима аварийной остановки, приведения в действие указанного приводного двигателя (3) с контролируемым уменьшением частоты вращения и тем самым с обеспечением торможения указанного полотна (2) ворот посредством приводного двигателя, при этом указанный приводной двигатель (3) обеспечивает достаточный крутящий момент при нулевой частоте вращения для удерживания полотна ворот в текущей позиции,
при этом указанная система привода и управления дополнительно содержит блок аккумуляторов, выполненный с возможностью снабжения электрической энергией приводного двигателя (3), блока (6) управления и блока (5) регулирования мощности в случае отключения электропитания, с обеспечением указанной функции управляемой остановки и удержания на месте.
2. Система по п. 1, отличающаяся тем, что приводной двигатель (3) представляет собой синхронный двигатель.
3. Система по п. 1, отличающаяся тем, что предусмотрена зарядка указанного блока аккумуляторов электрической энергией, регенерированной указанным приводным двигателем во время работы в режиме генератора.
4. Система по одному из пп. 1-3, отличающаяся тем, что блок управления выполнен с возможностью определения состояния отключения электропитания и с возможностью включения режима аварийной остановки.
5. Система по одному из пп. 1-3, отличающаяся тем, что она оснащена датчиком положения.
6. Система по п. 5, отличающаяся тем, что датчик положения выполнен с возможностью определения фактических координат положения, при этом блок управления выполнен с возможностью инициации управляемого прерывания перемещения в случае опасного отклонения от заданной скорости перемещения.
7. Система по п. 1, отличающаяся тем, что блок управления выполнен с возможностью обеспечения перемещения указанного полотна ворот в исключающую обрушение позицию при достижении заданного нижнего порогового значения остаточного заряда блока аккумуляторов.
8. Система по п. 1, отличающаяся тем, что блок управления выполнен с возможностью обеспечения дополнительного закрепления полотна ворот для предотвращения обрушения путем активирования стопорного тормоза при достижении заданного нижнего порогового значения остаточного заряда указанного блока аккумуляторов.
9. Система по п. 8, отличающаяся тем, что блок управления выполнен с возможностью контроля положения удержания на основе определенных координат при активированном стопорном тормозе и, в случае отклонения, с возможностью включения приводного двигателя для сохранения текущей позиции.
10. Подъемные ворота с вертикально перемещаемым полотном (2) ворот и системой привода по одному из пп. 1-9.
| US 20040183677 A1, 23.09.2004 | |||
| US 6194851 B1, 27.02.2001 | |||
| CN 103244002 A, 14.08.2013 | |||
| WO 2002016720 A2, 28.02.2002 | |||
| СПОСОБ ТРАВЛЕНИЯ ЧЕРНЫХ МЕТАЛЛОВ | 1934 |
|
SU38400A1 |

