Область техники, к которой относится изобретение
Изобретение относится к датчику выхлопных газов, установленному в автомобильном транспортном средстве, и способу мониторинга работы датчика выхлопных газов.
Уровень техники
Датчик выхлопных газов, оснащенный упреждающим контроллером, может быть расположен в выхлопной системе транспортного средства для определения соотношения «воздух/топливо» в выхлопных газах, выпускаемых двигателем внутреннего сгорания транспортного средства. Данные, полученные от датчика выхлопных газов, могут быть использованы для управления работой двигателя внутреннего сгорания, приводящего в движение транспортное средство.
Деградация датчика выхлопных газов (уменьшение эффективности его работы) может привести к ухудшению управления двигателем, что может стать причиной увеличенного количества выбросов и/или ухудшить дорожные качества транспортного средства. Таким образом, точное обнаружение деградации датчика выхлопных газов и последующая регулировка параметров упреждающего контроллера может уменьшить вероятность управления двигателем на основании показаний неисправного датчика выхлопных газов. В частности, возможно шесть отдельных типов деградации датчика выхлопных газов. Эти типы можно разделить на группу фильтрующего типа и группу запаздывающего типа. Также типы деградации могут быть симметричными, либо асимметричными относительно стехиометрического соотношения. Датчик выхлопных газов, имеющий асимметричный фильтрующий тип деградации, может иметь худшее значение постоянной времени показаний датчика лишь в одном направлении перехода воздушно-топливного соотношения (например, переход от богатой смеси к бедной смеси, либо от бедной смеси к богатой смеси). При ухудшении параметров датчика параметры упреждающего контроллера могут быть отрегулированы для достижения стабильности в работе замкнутой системы.
Известные из уровня техники подходы к регулировке параметров упреждающего контроллера датчика выхлопных газов при возникновении деградации включают в себя регулировку коэффициента усиления упреждающего контроллера только лишь в направлении деградации. В результате контроллер двигателя может асимметрично реагировать для подачи большего или меньшего количества топлива в направлении деградации. Данная асимметричная работа может привести к увеличению выбросов СО (фильтр перехода обеднение-обогащение) или увеличению выбросов NOx (фильтр перехода обогащение-обеднение).
Раскрытие изобретения
Для решения вышеуказанных проблем предлагается способ регулировки впрыска топлива в двигатель, в зависимости от модифицированного сигнала обратной связи по содержанию кислорода в выхлопных газах, полученного от датчика выхлопных газов. Этот сигнал обратной связи модифицирован путем преобразования асимметричного отклика датчика выхлопных газов в более симметричный отклик, например, в модифицированный симметричный отклик. Например, асимметричный отклик может являться асимметричным откликом о деградации фильтрующего типа, при этом скорость отклика ухудшается лишь в одном направлении перехода, либо ухудшается в одном направлении в большей степени, чем в другом направлении. В одном примере преобразование асимметричного отклика в модифицированный симметричный отклик может включать в себя фильтрацию неискаженной части (например, в направлении перехода) асимметричного отклика характеристики некоторым значением на основе постоянной времени искаженной части асимметричного отклика. После преобразования асимметричного отклика можно преобразовать один или несколько параметров упреждающего контроллера датчика выхлопных газов на основании преобразованного симметричного отклика. Например, можно отрегулировать и применить к обоим направлениям перехода отклика датчика выхлопных газов один или несколько из следующих параметров: пропорциональный коэффициент усиления, интегральный коэффициент усиления, постоянную времени контроллера и время задержки контроллера. В данном случае может быть достигнут технический эффект упреждающего контроллера, способного работать симметрично, тем самым уменьшая калибровочные работы контроллера и снижая выбросы NOx и СО двигателя.
Следует понимать, что вышеприведенное краткое изложение сущности изобретения представлено для описания в упрощенной форме ряда выбранных концепций, дальнейшее изложение которых приводится ниже в подробном описании. Краткое раскрытие сущности изобретения не направлено на определение основных или существенных характеристик заявленного предмета изобретения, объем которого однозначно определяется формулой изобретения. Кроме того, заявленный предмет изобретения не ограничивается вариантами реализации изобретения, устраняющими какой-либо из недостатков, указанных выше или в любой части данного описания.
Краткое описание чертежей
Фиг. 1 представляет собой схему примерной движительной системы транспортного средства, включающей в себя датчик выхлопных газов.
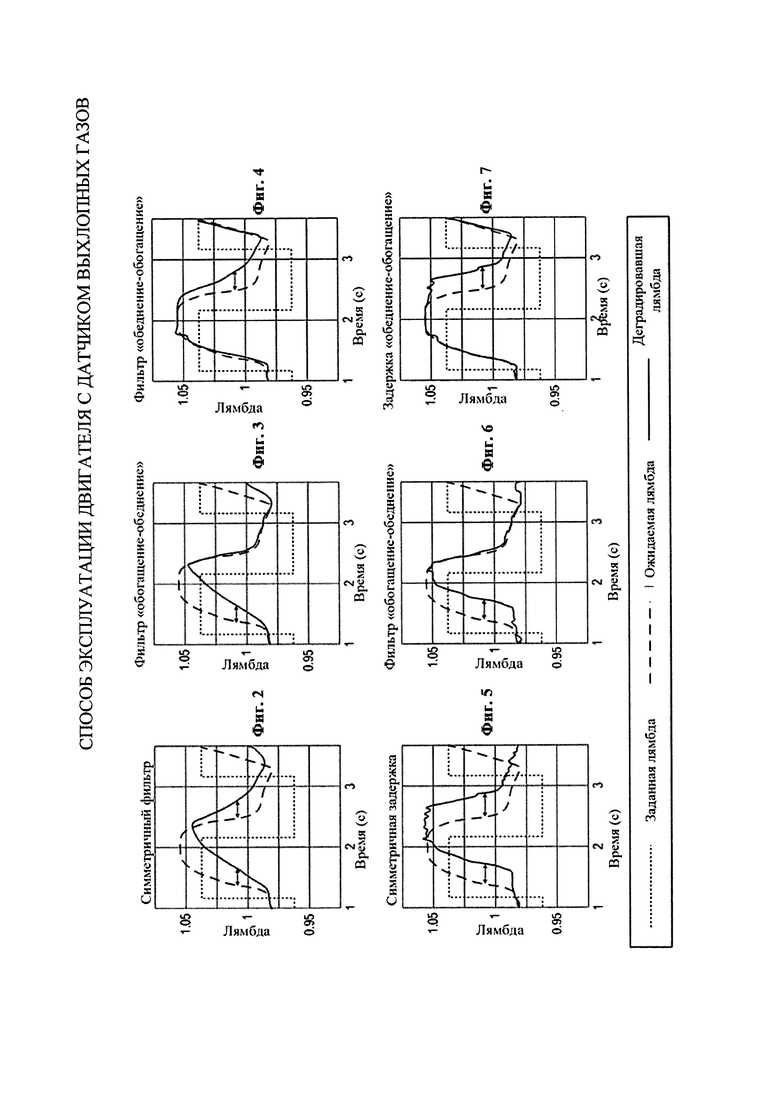
Фиг. 2 представляет собой график, показывающий деградацию датчика выхлопных газов по типу симметричного фильтра.
Фиг. 3 представляет собой график, показывающий деградацию датчика выхлопных газов по типу асимметричного фильтра при переходе от богатой смеси к бедной смеси.
Фиг. 4 представляет собой график, показывающий деградацию датчика выхлопных газов по типу асимметричного фильтра при переходе от бедной смеси к богатой смеси.
Фиг. 5 представляет собой график, показывающий деградацию датчика выхлопных газов по типу симметричной задержки.
Фиг. 6 представляет собой график, показывающий деградацию датчика выхлопных газов по типу асимметричной задержки при переходе от богатой смеси к бедной смеси.
Фиг. 7 представляет собой график, показывающий деградацию датчика выхлопных газов по типу асимметричной задержки перехода от бедной смеси к богатой смеси.
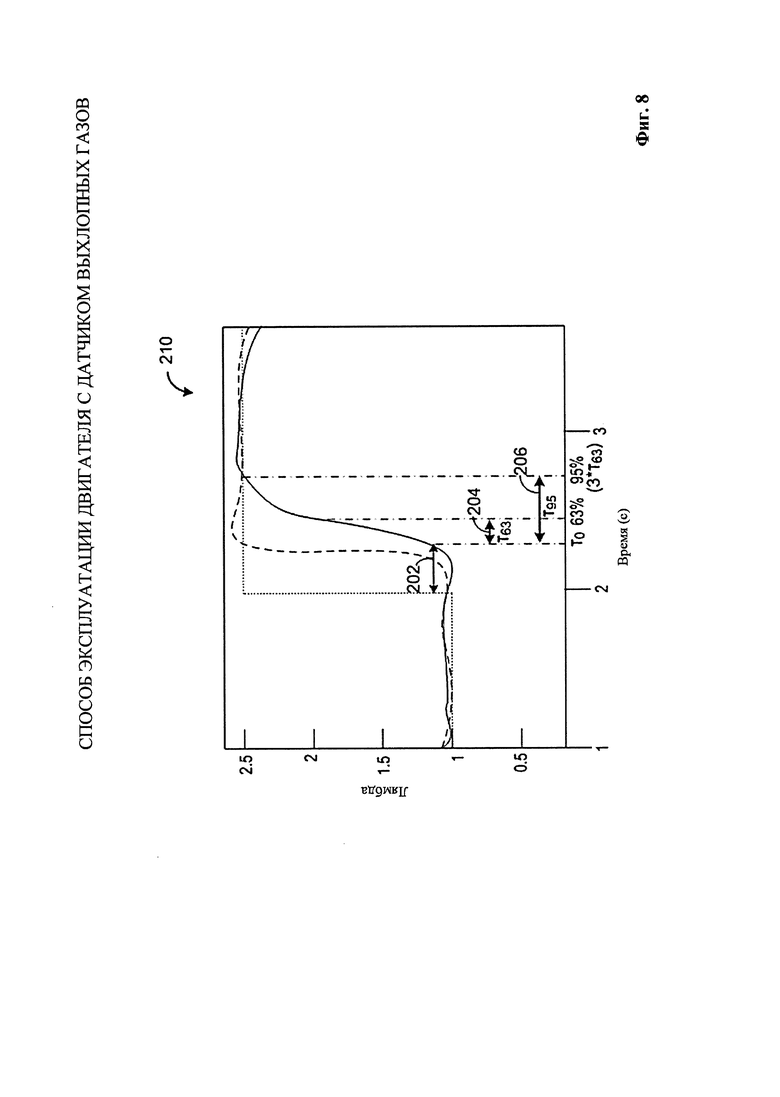
На Фиг. 8 изображен график ухудшенного отклика датчика выхлопных газов при отсечке топлива в режиме замедления (DFSO).
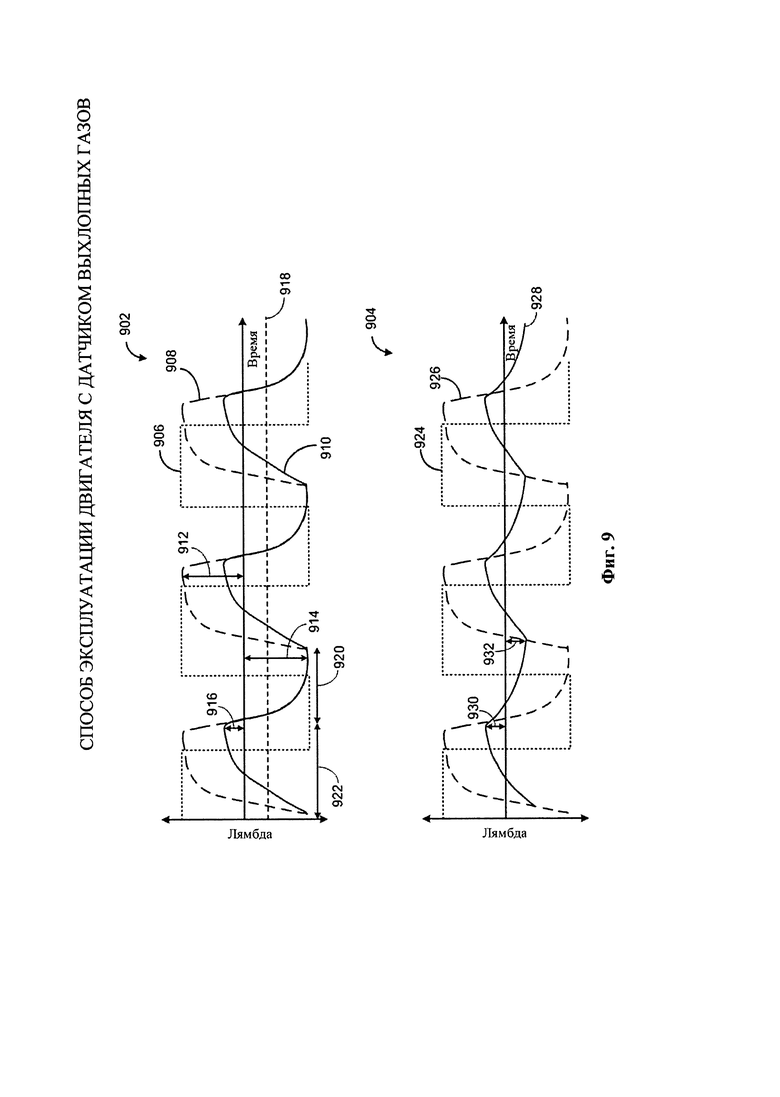
На Фиг. 9 представлены графики модифицированного отклика деградации симметричного фильтра, преобразованной из асимметричного отклика деградации фильтрующего типа для датчика выхлопных газов.
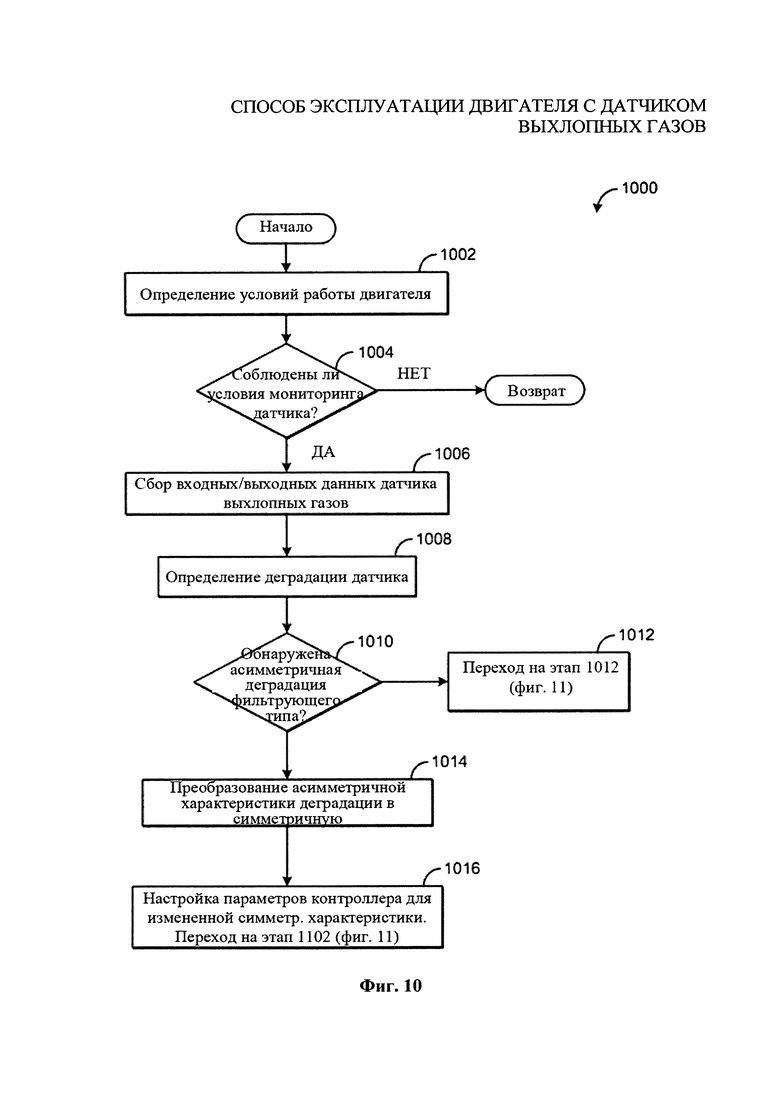
На Фиг. 10 изображен способ преобразования асимметричного отклика деградации фильтрующего типа для датчика выхлопных газов до более симметричного отклика деградации фильтрующего типа.
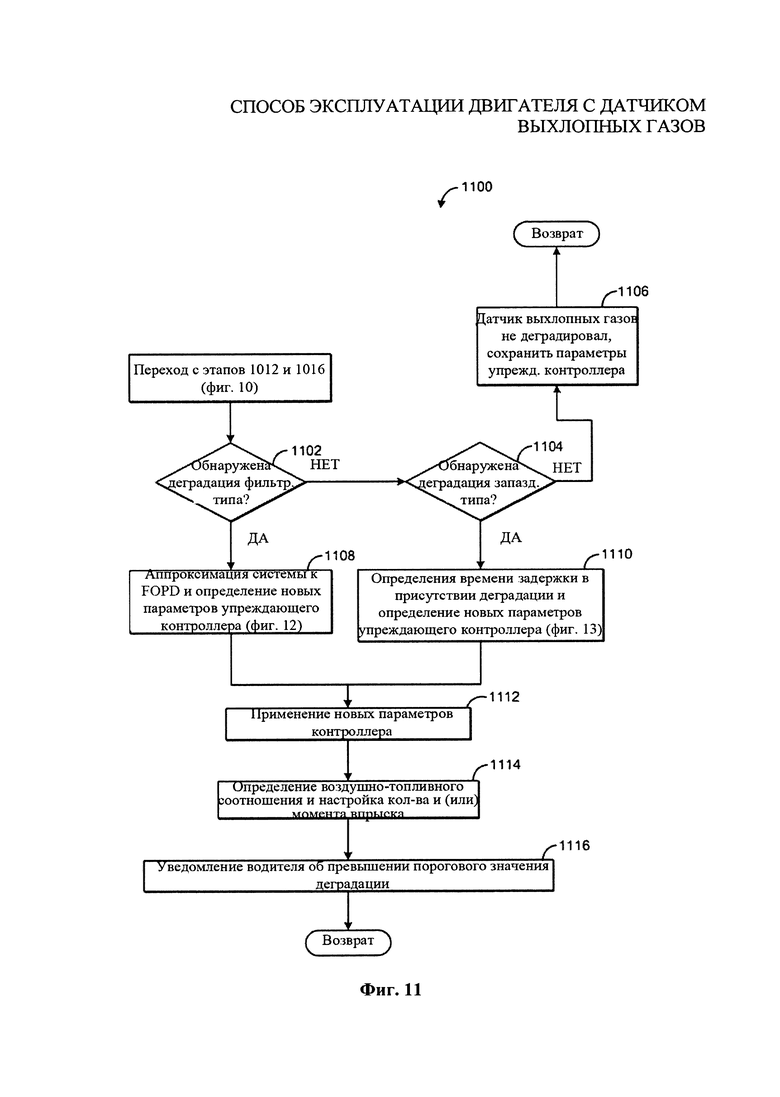
На Фиг. 11 изображен способ регулировки параметров упреждающего контроллера датчика выхлопных газов, основанный на типе и уровне деградации.
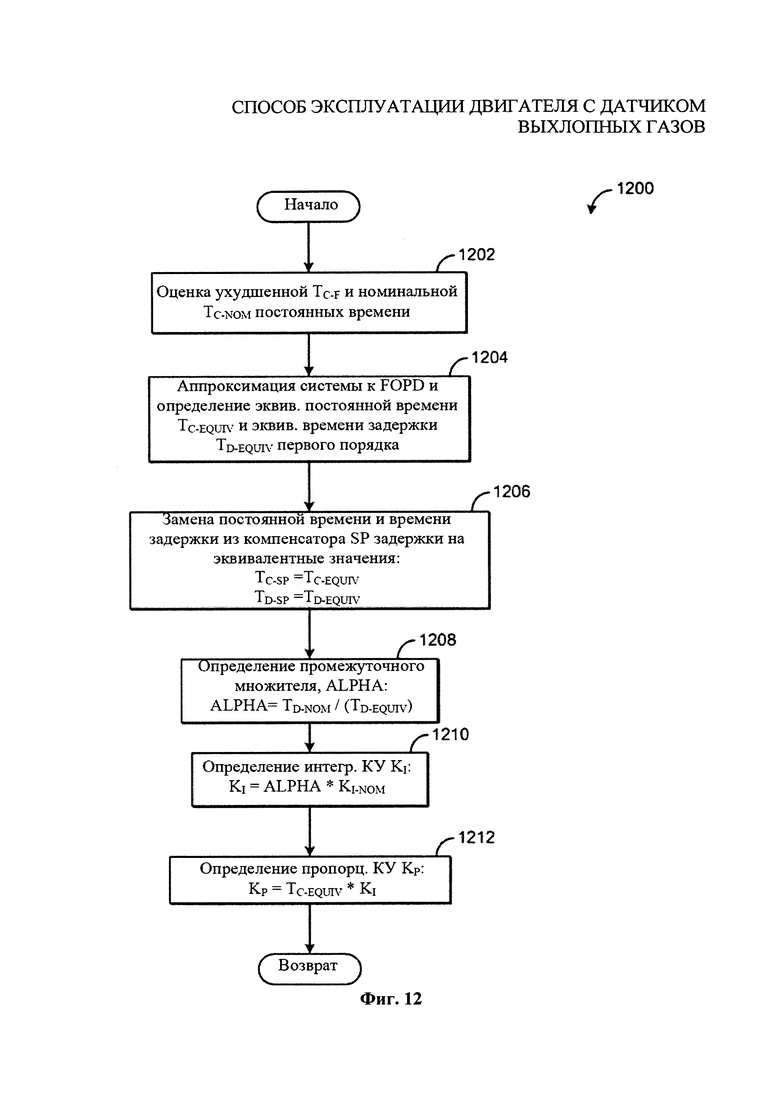
На Фиг. 12 изображен способ определения регулируемых параметров упреждающего контроллера датчика выхлопных газов на основании деградации фильтрационного типа.
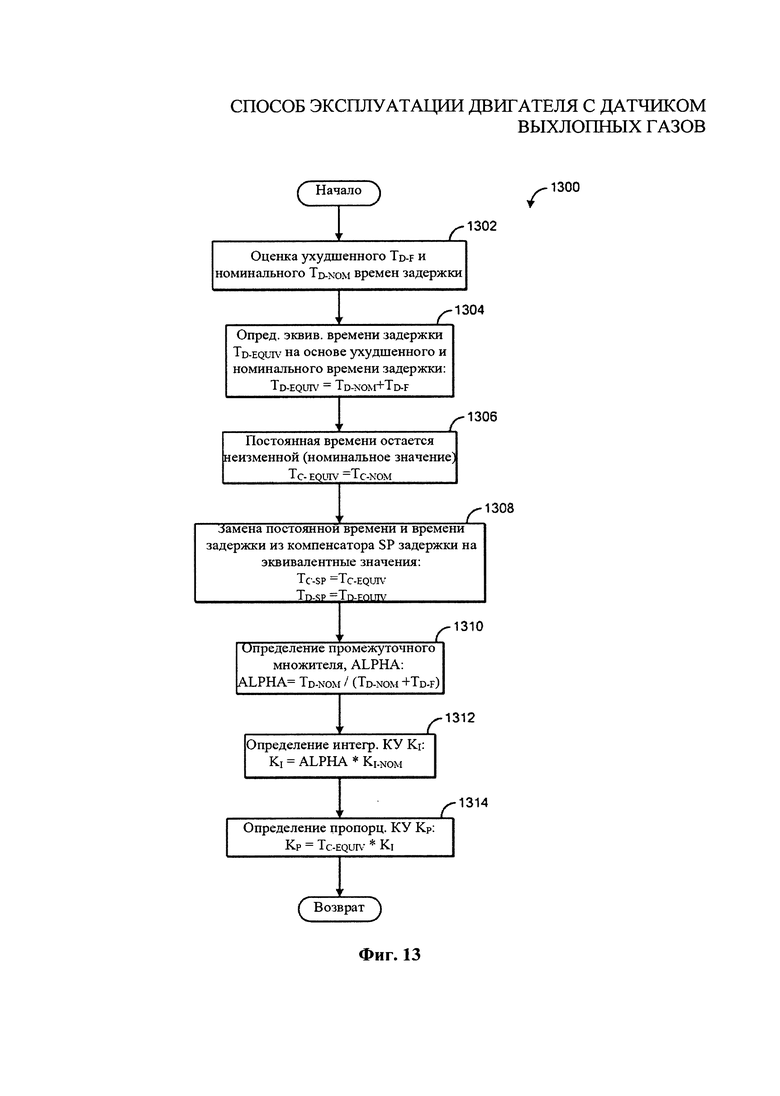
На Фиг. 13 изображен способ определения регулируемых параметров упреждающего контроллера датчика выхлопных газов на основании деградации задерживающего типа.
Осуществление изобретения
Следующее описание относится к системам и способам преобразования асимметричного отклика деградации датчика выхлопных газов, такого как датчик выхлопных газов с Фиг.1, в симметричный отклик деградации. В частности, асимметричный отклик деградации может быть асимметричным откликом деградации фильтрующего типа датчика выхлопных газов, как показано на Фиг. 3-4. На Фиг. 2-7 представлено шесть типов деградации датчика выхлопных газов (например, датчика кислорода в выхлопных газах), включая и асимметричные отклики деградации фильтрующего типа. На Фиг. 9 изображен пример преобразованной симметричного отклика деградации фильтрующего типа, полученной путем фильтрации неискаженной части асимметричного отклика деградации фильтрующего типа. Модифицированный симметричный отклик деградации фильтрующего типа может быть основан на постоянной времени искаженного участка асимметричного отклика деградации. На Фиг. 10 изображен способ преобразования асимметричного отклика деградации фильтрующего типа в симметричный отклик фильтрующего типа. Параметры упреждающего контроллера датчика выхлопных газов далее могут быть отрегулированы на основании амплитуды модифицированного отклика деградации фильтрующего типа. В одном примере амплитуда модифицированного симметричного отклика деградации фильтрующего типа может быть практически такой же, как и величина (например, постоянная времени) искаженного участка асимметричного отклика деградации фильтрующего типа. На Фиг. 11-13 представлены способы определения регулируемых параметров упреждающего контроллера на основании характеристик деградации. В случае асимметричной деградации фильтрующего типа регулируемые параметры упреждающего контроллера могут быть применены в обоих направлениях передачи (например, направления обеднение-обогащение и обогащение-обеднение), что делает операции упреждающего контроллера симметричными. В связи с этим, калибровочные работы контроллера могут быть уменьшены при одновременном уменьшении выбросов NOx и СО двигателя.
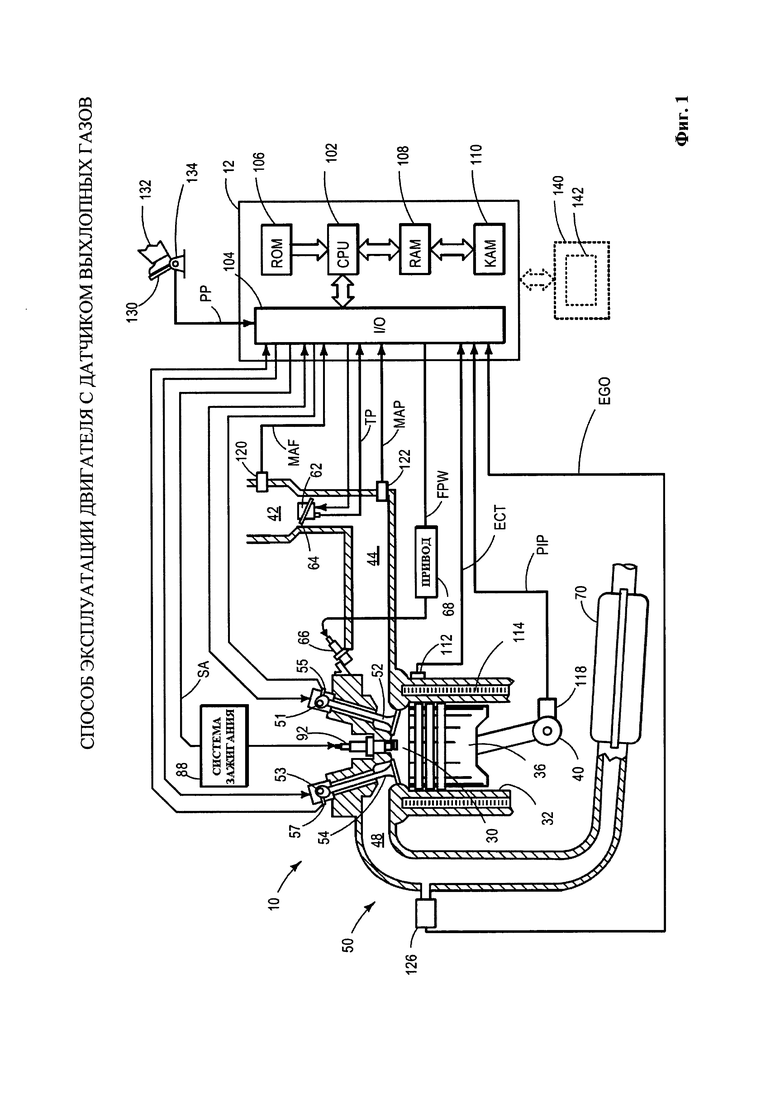
На Фиг. 1 представлено схематическое изображение двигателя 10, который может быть частью ходовой системы транспортного средства 100, в котором может быть использован датчик 126 выхлопных газов для определения воздушно-топливного соотношения в выхлопных газах, производимых двигателем 10. Соотношение воздух/топливо (наряду с другими рабочими параметрами) может быть использовано для управления двигателем 10 с обратной связью в различных режимах работы. Двигателем 10 можно управлять, по меньшей мере частично, с помощью системы управления, содержащей контроллер 12, а также с помощью входных сигналов, направляемых водителем 132 транспортного средства с помощью устройства 130 ввода данных. В данном примере устройство 130 ввода данных представляет собой педаль газа и датчик 134 положения педали, которые генерируют пропорциональный сигнал положения педали PP. Камере 30 сгорания (например, цилиндре) двигателя 10 может иметь стенки 32 с расположенным в них поршнем 36. Поршень может быть соединен с коленчатым валом 40 для преобразования возвратно-поступательных движений поршня во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен с по меньшей мере одним ведущим колесом транспортного средства с помощью системы. Кроме того, для запуска двигателя 10 к коленчатому валу 40 может быть с помощью маховика подключен пусковой мотор.
В камеру 30 сгорания воздух поступает из впускного коллектора 44 через впускной канал 42, а газообразные продукты сгорания выводятся через выхлопной канал 48. Дроссель 62, содержащий дроссельную заслонку 64, расположен во впускном канале 42. Дроссель выполнен таким образом, чтобы регулировать воздушный поток, поступающий в цилиндры двигателя. Регулировка положения дроссельной заслонки 64 может увеличить или уменьшить степень открытия дросселя 62, что позволит изменить массовый расход воздуха, либо скорость потока всасываемого воздуха, попадающего в цилиндры двигателя. Например, за счет увеличения степени открытия дросселя 62 массовый расход воздуха увеличивается. И наоборот, за счет уменьшения степени открытия дросселя 62 массовый расход воздуха может уменьшаться. В данном случае регулировка дросселя 62 может изменять количество воздуха, попадающего в камеру 30 сгорания. Например, за счет увеличения массового расхода воздуха, может увеличиваться выходной крутящий момент двигателя.
Впускной коллектор 44 и выхлопной канал 48 выборочно сообщаются с камерой 30 сгорания через соответствующие впускной клапан 52 и выпускной клапан 54. В некоторых вариантах камеры 30 сгорания могут иметь по два или более впускных клапана и/или два или более выпускных клапана. В данном примере впускной клапан 52 и выпускные клапаны 54 могут приводиться в действие системами 51 и 53 кулачкового привода. Системы 51 и 53 кулачкового привода каждая может содержать один или более кулачков и может использовать одну или несколько систем, выбранных из системы переключения профиля кулачка (CPS), изменяемой синхронизации кулачка (VCT), изменяемой фазы газораспределения (VVT) и/или изменяемого подъема клапана (VVL), которые могут управляться контроллером 12 для изменения работы клапана. Положение впускного клапана 52 и выпускного клапана 54 может быть определено позиционными датчиками 55 и 57 соответственно. В других вариантах осуществления изобретения управление впускным клапаном 52 и/или выпускным клапаном 54 может осуществляться электрическим клапанным приводом. Например, цилиндр 30 может иметь впускной клапан, управление которым осуществляется с помощью электрического клапанного привода, и выпускной клапан, управление которым осуществляется кулачковым приводом, системы CPS и/или VCT.
Топливная форсунка 66 показана расположенной во впускном коллекторе 44 таким образом, чтобы обеспечивать так называемый впрыск топлива во впускной канал выше по потоку относительно камеры 30 сгорания. Топливная форсунка 66 может впрыскивать топливо пропорционально ширине импульса сигнала FPW, полученного от контроллера 12 через электронный привод 68. Топливная форсунка 66 получает топливо из топливной системы (не показана), которая включает в себя топливный бак, топливный насос и топливную рампу. В некоторых вариантах осуществления изобретения камера 30 сгорания может в качестве варианта либо дополнительно содержать топливную форсунку, соединенную непосредственно с камерой 30 сгорания для впрыска топлива непосредственно в камеру способом, известным как прямой впрыск.
Система 88 зажигания может подавать искру зажигания в камеру сгорания 30 через свечу 92 зажигания в соответствии с сигналом опережения зажигания SA от контроллера 12 в выбранных рабочих режимах. Несмотря на то, что показаны компоненты искрового зажигания, в некоторых вариантах осуществления изобретения камера сгорания 30 или одна или более камер сгорания двигателя 10 могут работать в режиме воспламенения от сжатия с искрой зажигания или без искры.
Датчик 126 выхлопных газов показан подключенным к выпускному каналу 48 выше по потоку устройства 70 снижения токсичности выхлопных газов. Датчиком 126 выхлопных газов может быть любой подходящий датчик, пригодный для получения информации о топливно-воздушном коэффициенте выхлопных газов, например, линейный датчик кислорода или UEGO (универсальный или широкодиапазонный датчик кислорода выхлопных газов), бистабильный датчик кислорода или EGO, датчик HEGO (подогреваемый EGO), датчик NOx, датчик углеводородов или датчик СО. В некоторых примерах осуществления изобретения датчик выхлопных газов 126 может быть первым из множества датчиков выхлопных газов, установленных в выхлопной системе. Например, дополнительные датчики выхлопных газов могут быть установлены ниже по потоку относительно устройства 70 уменьшения токсичности выхлопа.
Устройство 70 снижения токсичности выхлопных газов показано установленным вдоль выпускного канала 48 ниже по потоку датчика 126 выхлопных газов. Устройство 70 может представлять собой трехкомпонентный нейтрализатор (TWC), ловушку NOx, другое устройство снижения токсичности выхлопных газов или их комбинации. В некоторых примерах осуществления изобретения устройство 70 снижения токсичности выхлопных газов может быть первым из множества устройств снижения токсичности выхлопных газов, установленных в выхлопной системе. В некоторых вариантах осуществления изобретения во время работы двигателя 10 устройство 70 снижения токсичности выхлопных газов может периодически перезапускаться за счет работы по меньшей мере одного цилиндра двигателя при определенном воздушно-топливном коэффициенте.
Контроллер 12 показан на Фиг.1 как микрокомпьютер, содержащий микропроцессорный блок 102 (CPU), порты ввода/вывода 104 (I/O), электронный носитель данных для исполняемых программ и калибровочных значений, показанный как постоянное запоминающее устройство 106 (ROM), оперативное запоминающее устройство 108 (RAM), энергонезависимое запоминающее устройство ПО (КАМ) и обычную шину данных. В дополнение к сигналам, рассмотренным ранее, контроллер 12 может получать различные сигналы от датчиков, подключенных к двигателю 10, включая: измерение массового расхода воздуха, поступающего в двигатель (MAF) от датчика 120, температуру охлаждающей жидкости двигателя (ЕСТ) от датчика температуры 112, подключенного к рукаву охлаждения 114; профильный выходной сигнал зажигания (PIP) от датчика 118 на эффекте Холла (или другого типа), подключенного к коленчатому валу 40; измерение положения дроссельной заслонки (TP) от датчика положения дросселя; и сигнал об абсолютном давлении во впускном коллекторе двигателя (MAP) от датчика давления 122. Сигнал частоты вращения двигателя RPM может генерироваться контроллером 12 из сигнала PIP. Сигнал давления во впускном коллекторе (MAP) от датчика давления во впускном коллекторе может использоваться для получения показаний о разрежении или давлении во впускном коллекторе. Необходимо принять во внимание, что могут использоваться различные комбинации вышеуказанных датчиков, например, MAF без MAP или наоборот. Во время стехиометрической работы датчик MAP может подавать сигналы о крутящем моменте двигателя. Кроме того, этот датчик вместе с фиксированной частотой вращения двигателя может предоставить информацию о величине заряда (включая воздушный заряд), всасываемого в цилиндр. В одном примере датчик 118, который также может быть использован как датчик частоты вращения двигателя, может выдавать заданное количество равноотстоящих импульсов на каждый оборот коленчатого вала.
Кроме того, по крайней мере некоторые из вышеописанных сигналов могут быть использованы для определения деградации датчика выхлопных газов, описанном более подробно далее. Например, величина, обратная частоте вращения двигателя, может быть применена для определения задержек, связанных с циклом впрыск - всасывание - сжатие - расширение - выпуск. В качестве еще одного примера величина, обратная скорости (или величина, обратная сигналу MAF) может быть применена для определения задержки, связанной с прохождением выхлопных газов от выпускного клапана 54 к датчику 126 выхлопных газов. Вышеописанные примеры, наряду с другими функциями сигналов от датчиков двигателя, могут быть использованы для определения временной задержки между изменением заданного воздушно-топливного коэффициента и скорости отклика датчика выхлопных газов.
В некоторых примерах осуществления изобретения определение деградации и калибровка датчика выхлопных газов может быть выполнена в специализированном контроллере 140. Специализированный контроллер 140 может иметь процессинговые средства 142, представляющие собой ресурсы для обработки сигналов, связанных с выполнением, калибровкой и подтверждением определения ухудшения характеристик датчика 126 выхлопных газов. В частности, буфер для образцов (например, генерирующий приблизительно 100 образцов в секунду для каждого ряда цилиндров), который применяют для регистрации скорости отклика датчика выхлопных газов, может быть слишком большим для обрабатывающих ресурсов блока управления трансмиссией (БУТ) автомобильного транспортного средства. Соответственно специализированный контроллер 140 может быть функционально соединен с контроллером 12 для определения ухудшения характеристик датчика выхлопных газов. Следует отметить, что специализированный контроллер 140 может принимать сигналы о параметрах двигателя от контроллера 12 и посылать на контроллер 12 сигналы управления двигателем и данные об определении ухудшения характеристик через другие линии связи.
Датчик 126 выхлопных сигналов может иметь упреждающий контроллер. В одном примере упреждающий контроллер может включать в себя пропорционально-интегральный регулятор (или PI-регулятор) и компенсатор задержки, такой как предиктор Смита (компенсатор задержки SP). Пропорционально-интегральный регулятор может иметь пропорциональный коэффициент усиления KP и интегральный коэффициент усиления KI. Предиктор Смита можно применять для компенсации задержки, при этом он может иметь постоянную времени TC-SP и задержку времени TD.SP. В связи с этим, пропорциональный коэффициент усиления, интегральный коэффициент усиления, постоянная времени и время задержки регулятора могут являться параметрами упреждающего контроллера датчика выхлопных газов. Путем регулировки этих параметров можно менять выходной сигнал датчика 126 выхлопных газов. Например, путем регулировки вышеуказанных параметров можно изменить скорость отклика показаний воздушно-топливного соотношения, генерируемых датчиком 126 выхлопных газов. В ответ на деградацию датчика выхлопных газов вышеперечисленные параметры контроллера могут быть отрегулированы для компенсации деградации и увеличения точности показаний воздушно-топливного соотношения, что позволит увеличить управляемость и эффективность двигателя. Специальный контроллер 140 также может быть соединен с упреждающим контроллером. В связи с этим специальный контроллер 140 и/или контроллер 12 могут выполнять регулировку параметров упреждающего контроллера на основе типа деградации, определенного с помощью любого из доступных способов диагностики, как будет сказано далее. В одном примере параметры контроллера датчика выхлопных газов могут быть отрегулированы на основе уровня и типа деградации. В другом примере специальный контроллер 140 и/или контроллер 12 могут преобразовать или изменить искаженную отклик или сигнал от датчика выхлопных газов, после чего отрегулировать параметр контроллера на основе этого преобразованного искаженного сигнала. Шесть типов деградации описаны ниже со ссылкой на Фиг. 2-7. Ниже со ссылкой на Фиг. 9-13 представлена более подробная информация о регулировке коэффициентов усиления, постоянных времени и времени задержки контроллера датчика выхлопных газов, а также преобразование искаженного сигнала датчика выхлопных газов.
Необходимо отметить, что постоянное запоминающее устройство 106 и/или обрабатывающие ресурсы 142 могут быть запрограммированы под машиночитаемые данные, которые представляют собой команды для выполнения процессорным блоком 102 и/или специализированным контроллером 140 для реализации способов, описанных далее, а также других вариантов.
Как было изложено выше, деградация датчика выхлопных газов может быть обнаружена на основании одного или, в некоторых примерах, всех шести отдельных типов изменений, определяемых задержками в скорости отклика датчика выхлопных газов при формировании им данных о воздушно-топливном соотношении во время переходов смеси от богатой к бедной и/или от бедной к богатой. На Фиг. 2-7 представлены графики, каждый из которых изображает один из шести отдельных типов деградации датчика выхлопных газов. Графики представляют собой зависимость воздушно-топливного соотношения (лямбда) от времени (в секундах). На каждом графике пунктирная линия обозначает сигнал о заданной лямбде, который может быть направлен на элементы двигателя (например, топливные форсунки, клапаны цилиндров, дроссель, свечу зажигания и т.д.) для формирования воздушно-топливного соотношения, которое проходит цикл, включающий в себя один или несколько переходов смеси от бедной к богатой и один или несколько переходов смеси от богатой к бедной. На каждом графике пунктирная линия обозначает ожидаемое время отклика лямбды для датчика выхлопных газов. На каждом графике сплошная линия обозначает сигнал деградировавшей лямбды, который будет подан неисправным датчиком выхлопных газов в ответ на сигнал заданной лямбды. На каждом графике линии с двойными стрелками обозначают область, где данный тип ухудшении характеристик датчика отличается от сигнала ожидаемой лямбды.
Система с Фиг. 1 может предусматривать систему транспортного средства, в которую входит двигатель с системой впрыска топлива и датчиком выхлопных газов, расположенным в выхлопной системе двигателя, при этом датчик выхлопных газов имеет упреждающий контроллер. Также система может включать в себя контроллер, содержащий выполняемые программы для трансформации асимметричного отклика деградации датчика выхлопных газов в модифицированный симметричный отклик деградации на основании амплитуды и направления асимметричного отклика. Выполняемые программы для трансформации асимметричного отклика деградации могут включать в себя фильтрацию неискаженного направления перехода асимметричного отклика на основании постоянной времени искаженного направления перехода асимметричного отклика. Программа также может включать в себя регулировку одного или нескольких параметров упреждающего контроллера согласно модифицированного симметричного отклика деградации, при этом величина регулировки основывается на амплитуде модифицированного симметричного отклика. Также количество топлива и/или синхронизация системы впрыска топлива могут быть отрегулированы на основании сигнала обратной связи по концентрации кислорода в выхлопных газах от упреждающего контроллера.
Фиг. 2 представляет собой график, обозначающий первый тип ухудшения характеристик, который может выявить неисправный датчик выхлопных газов. Данный первый тип ухудшения характеристик является симметричным фильтром, который включает в себя медленный отклик датчика выхлопных газов на сигнал заданной лямбды для регулирования переходов смеси от богатой к бедной и от бедной к богатой. Другими словами, сигнал деградировавшей лямбды может начать переход от богатого к бедному и от бедного к богатому в ожидаемые моменты времени, но скорость отклика может быть ниже ожидаемой, что приведет к уменьшенной длительности пиков бедных и богатых состояний.
Фиг. 3 представляет собой график, обозначающий второй тип ухудшения характеристик, который может выявить неисправный датчик выхлопных газов. Данный второй тип ухудшения характеристик является асимметричным фильтром перехода от богатой смеси к бедной смеси, который включает в себя медленный отклик датчика выхлопных газов на сигнал заданной лямбды для перехода от богатой топливовоздушной смеси к бедной. Такой тип ухудшения характеристик датчика может начать переход от богатого к бедному в ожидаемый момент времени, но скорость отклика может быть ниже ожидаемой, что может привести к уменьшенной длительности пика бедного состояния. Данный тип ухудшения характеристик датчика можно считать асимметричным, поскольку отклик датчика выхлопных газов медленный (или ниже ожидаемого) во время перехода от богатой смеси к бедной смеси. При возникновении данного типа деградации контроллер может поставлять меньшее количество топлива при переходе от обогащения к обеднению смеси. В результате могут увеличиться выбросы NOx.
Фиг. 4 представляет собой график, обозначающий третий тип ухудшения характеристик, который может выявить неисправный датчик выхлопных газов. Данный третий тип ухудшении характеристик является асимметричным фильтром перехода от бедной смеси к богатой, который включает в себя медленный отклик датчика выхлопных газов на сигнал заданной лямбды для перехода от бедной смеси к богатой. Такой тип ухудшения характеристик датчика может начать переход от бедной смеси к богатой в ожидаемый момент времени, но скорость отклика может быть ниже ожидаемой, что может привести к уменьшенной длительности пика богатого состояния. Данный тип ухудшения характеристик датчика можно считать асимметричным, поскольку отклик датчика выхлопных газов медленный (или ниже ожидаемого) только во время перехода от бедной смеси к богатой. При возникновении данного типа деградации контроллер может поставлять большее количество топлива при переходе от обеднения к обогащению смеси. В результате могут увеличиться выбросы СО.
Фиг. 5 представляет собой график, обозначающий четвертый тип ухудшения характеристик, который может выявить неисправный датчик выхлопных газов. Данный четвертый тип ухудшения характеристик является симметричной задержкой, которая включает в себя задержку отклика на сигнал заданной лямбды для регулирования переходов смеси от богатой к бедной и от бедной к богатой. Другими словами, сигнал деградировавшей лямбды может начать переход от богатого к бедному и от бедного к богатому в моменты времени, которые наступают позднее ожидаемых моментов времени, но соответствующий переход может происходить с ожидаемой скоростью отклика, что приводит к смещению длительностей пиков бедных и богатых состояний.
Фиг. 6 представляет собой график, обозначающий пятый тип ухудшения характеристик, который может выявить неисправный датчик выхлопных газов. Данный пятый тип ухудшения характеристик является асимметричной задержкой перехода от богатой смеси к бедной смеси, которая включает в себя задержку отклика на сигнал заданной лямбды для перехода от богатой топливовоздушной смеси к бедной. Другими словами, сигнал деградировавшей лямбды может начать переход от богатой смеси к бедной смеси в момент времени, который происходит позднее ожидаемого момента времени, но переход может происходить с ожидаемой скоростью отклика, что приводит к смещению и/или уменьшению длительностей пиков бедной смеси. Данный тип ухудшения характеристик датчика можно считать асимметричным, поскольку отклик датчика выхлопных газов происходит с задержкой только относительно ожидаемого времени начала отклика во время перехода от богатой смеси к бедной.
Фиг. 7 представляет собой график, обозначающий шестой тип ухудшения характеристик, который может выявить неисправный датчик выхлопных газов. Данный шестой тип ухудшения характеристик является асимметричной задержкой перехода от бедной смеси к богатой, которая включает в себя задержку отклика на сигнал заданной лямбды для перехода от бедной смеси к богатой. Другими словами, сигнал деградировавшей лямбды может начать переход от бедной смеси к богатой в момент времени, который наступает позднее ожидаемого момента времени, но переход может происходить с ожидаемой скоростью отклика, что приводит к смещению и/или уменьшению длительностей пиков богатого состояния. Данный тип ухудшения характеристик датчика можно считать асимметричным, поскольку отклик датчика выхлопных газов происходит с задержкой только относительно ожидаемого времени начала отклика во время перехода от бедной смеси к богатой.
Шесть описанных выше типов деградации датчика выхлопных газов можно разделить на две группы. Первая группа включает в себя деградацию фильтрующего типа, в которой уменьшается скорость реакции показаний воздушно-топливного соотношения (например, задержка отклика увеличивается). В связи с этим постоянная времени отклика может изменяться. Вторая группа включает в себя деградацию типа задержки, в которой время отклика показаний воздушно-топливного соотношения запаздывает. Таким образом, время задержки отклика сигнала соотношения воздушно-топливного соотношения может увеличиться относительно ожидаемой реакции.
Фильтрующий тип и запаздывающий тип деградации влияют на систему управления динамикой датчика выхлопных газов по-разному. В ответ на ухудшенный отклик датчика выхлопных газов упреждающему контроллеру может потребоваться выполнить компенсацию управления для сохранения стабильности системы управления. Следовательно, при возникновении деградации датчика выхлопных газов параметры контроллера могут быть отрегулированы для компенсации деградации и увеличения точности показаний воздушно-топливного соотношения, тем самым увеличивая управляемость и эффективность двигателя. Например, если обнаружен запаздывающий тип деградации, то новые значения временной задержки и коэффициента усиления контроллера можно будет определить на основе ухудшенной временной задержки отклика. Если обнаружен деградация фильтрующего типа, то новые значения постоянной времени и временной задержки и коэффициентов усиления контроллера можно будет определить на основе ухудшенной постоянной времени отклика.
Однако если деградация фильтрующего типа является асимметричной, то регулировка коэффициентов усиления и параметров компенсации задержки упреждающего контроллера в направлении деградации может лишь сохранить стабильность работы замкнутой топливной системы. Этого может оказаться недостаточно для обеспечения стехиометрического соотношения в работе системы управления двигателя, что требует дальнейшей калибровки упреждающего контроллера на основе уровня (например, величины) асимметричной деградации фильтрующего типа. Однако путем преобразования асимметричной деградации фильтрующего типа в более симметричную, стехиометрическое соотношение при работе замкнутой системы может быть сохранено, что позволит компенсировать смещение обеднения и/или обогащения, возникшее из-за асимметричной работы. Более подробно компенсация и корректировка асимметричной реакции датчика, а также регулировка параметров контроллера датчика выхлопных газов описаны ниже со ссылкой на Фиг. 9-13.
Для диагностики деградации датчика выхлопных газов можно использовать различные способы. В одном примере деградацию можно определить на основе временной задержки и длины линии каждой выборки данных датчика выхлопных газов, собранных при заданном изменении воздушно-топливного соотношения. На Фиг. 8 изображен пример определения временной задержки и длины линии от реакции датчика выхлопных газов до входа в режим отсечки топлива в режиме замедления (DFSO). В частности, на Фиг. 8 изображен график 210, на котором представлены заданная лямбда, ожидаемая лямбда и ухудшенная лямбда подобно значениям, описанным со ссылкой на Фиг. 2-7. На Фиг. 8 представлен переход от обогащению к обеднению и/или симметричная деградация запаздывающего типа, при этом временная задержка отклика к заданному изменению воздушно-топливного соотношения запаздывает. Стрелка 202 демонстрирует временную задержку, которая является промежутком времени с начала заданного изменения значения лямбды до момента времени (τ0), в котором наблюдается изменение порога измеренного значения лямбды. Пороговое изменение лямбды может быть малым значением, указывающим на отклик на заданное изменение, например, 5%, 10%, 20% и т.д. Стрелка 204 указывает на постоянную времени (τ63) отклика, которая в системе первого порядка является отрезком времени от τ0 до момента времени, когда достигнуто 63% от установившегося отклика. Стрелка 206 указывает на промежуток времени от τ0 до момента времени, когда достигнуто 95% от требуемого отклика, что в ином случае рассматривается как пороговое время (τ95) реакции. В системе первого порядка пороговое время (τ95) реакции приблизительно равно трем временным постоянным (3* τ63).
Из этих параметров можно вывести различные подробные данные, касающиеся реакции датчика выхлопных газов. Сначала время задержки, указанное стрелкой 202, можно сравнить с ожидаемым временем задержки для определения, демонстрирует ли датчик деградацию типа задержки. Затем постоянную времени, указанную стрелкой 204, можно использовать для прогнозирования момента τ95. И наконец, длина линии, указанная стрелкой 206, может быть определена на основе изменения значения лямбды во всей характеристике, начиная с момента τ0. Длина линии является длительностью сигнала датчика и может быть использована для определения наличия ухудшения реакции датчика (например, деградация фильтрующего типа). Длина линии может быть определена на основе следующего уравнения:

Если определенная длина линии больше ожидаемой длины, то датчик выхлопных газов может демонстрировать деградацию фильтрующего типа. Постоянная времени и/или время задержки деградировавшего отклика датчика выхлопных газов могут быть использованы контроллером для регулировки параметров контроллера датчика выхлопных газов. Способы регулировки параметров контроллера датчика выхлопных газов, основанные на типе деградации, представлены ниже на Фиг. 10-13.
В другом примере деградация датчика выхлопных газов может быть определена путем мониторинга характеристик распределения предельных значений от множества успешных выборок лямбды в установившихся условиях работы. В одном примере характеристикой может являться мода и центральный пик обобщенного распределения предельных значений (GEV) перепадов лямбды, собранных в установившемся режиме работы. Асимметричная деградация запаздывающего типа или асимметричная деградация медленного срабатывания может быть определена на основе величины центрального пика и/или амплитуды моды. Дальнейшая классификация, например, симметричная деградация запаздывающего типа или симметричная деградация медленного срабатывания, может быть основана на определенной задержке датчика или постоянной времени датчика. В частности, если определенное время задержки датчика больше номинального, то обнаружена симметричная задержка датчика (например, которая указывает на деградацию запаздывающего типа). Номинальное время задержки датчика является ожидаемой задержкой реакции датчика на заданное изменение воздушно-топливного соотношения на основании задержки с момента впрыска топлива, сгорания и выхода выхлопных газов из камеры сгорания к датчику выхлопных газов. Определить время задержки можно, когда датчик действительно отправил выходной сигнал, указывающий на изменение воздушно-топливного соотношения. Подобным образом, если определенная постоянная времени датчика больше номинальной, то выводится индикация о симметричной деградации датчика (например, деградации фильтрующего типа). Номинальная постоянная времени может являться значением, указывающим на то, как быстро датчик реагирует на заданное изменение параметра лямбда, и может быть определена автономно на основании неискаженного отклика датчика. Как было сказано ранее, определенная постоянная времени и/или время задержки деградировавшего отклика датчика выхлопных газов могут быть использованы контроллером для регулировки параметров контроллера датчика выхлопных газов.
В другом примере деградация датчика выхлопных газов может быть определена с помощью параметров, найденных из двух моделей работы: модель сжигания богатой топливной смеси и модель сжигания бедной топливной смеси. Заданное воздушно-топливное соотношение и соотношение, указанное датчиком выхлопных газов можно сравнить, предположив, что процесс горения, создавший данное воздушно-топливное соотношение, был произведен в богатой топливной смеси (например, введя заданное значение лямбды в модель обогащенной смеси), а также можно предположить, что процесс горения был в обедненной топливной смеси (например, введя заданное значение лямбды в модель обедненной смеси). Для каждой модели может быть определен набор параметров, что демонстрирует лучшее соответствие заданных значений лямбда с измеренными значениями лямбда. Параметры модели могут включать в себя постоянную времени, время задержки и статический коэффициент усиления модели. Определенные параметры из каждой модели можно сравнить друг с другом, после чего можно определить тип деградации датчика (фильтрующий или запаздывающий) на основе различия между этими определенными параметрами.
Один или несколько вышеуказанных способов диагностики деградации датчика выхлопных газов можно использовать в процедурах, описанных далее (Фиг. 10-13). Эти способы могут применяться для определения наличия деградации датчика выхлопных газов, и в случае деградации они могут определить ее тип (фильтрующий или запаздывающий). Также эти способы можно применять для определения степени деградации. В частности, вышеуказанные способы могут определять деградировавшие параметры времени задержки и/или постоянной времени.
После определения наличия деградации датчика выхлопных газов один или несколько вышеописанных способов можно использовать для определения постоянной времени и/или времени задержки деградировавшей реакции датчика. Эти параметры можно рассматривать как деградировавшую (например, нарушенную) постоянную времени TC.F и деградировавшее время задержки TD-F. Деградировавшие постоянная времени и время задержки можно использовать наряду с номинальной постоянной времени TC-nom и номинальным временем задержки TD-nom для определения регулируемых параметров упреждающего контроллера. Как было сказано ранее, регулируемые параметры упреждающего контроллера могут включать в себя пропорциональный коэффициент усиления KP, интегральный коэффициент усиления KI, постоянную времени контроллера TC-SP и время задержки контроллера TD-SP.Регулируемые параметры контроллера также могут быть основана на номинальной системе параметров (например, заранее заданный набор параметров упреждающего контроллера). Путем регулировки коэффициентов усиления контроллера, постоянной времени и времени задержки компенсатора задержки SP, можно увеличить точность задания воздушно-топливного соотношения и стабильность упреждающего контроллера. Таким образом, после применения регулируемых параметров контроллера в системе датчика выхлопных газов контроллер двигателя может отрегулировать синхронизацию впрыска топлива и/или количество топлива на основе выходного сигнала воздушно-топливного соотношения от датчика выхлопных газов. В некоторых вариантах воплощения изобретения, если деградация датчика выхлопных газов превышает пороговое значение, то контроллер двигателя может дополнительно предупредить водителя транспортного средства.
Как было сказано ранее, при возникновении деградации асимметричного фильтрующего типа контроллер двигателя может отреагировать асимметрично для впрыска большего или меньшего количества топлива в направлении деградации (например, при переходе от обедненного состава смеси к обогащенному или наоборот). Данная асимметричная работа может привести к увеличению выбросов СО или увеличению NOx. Вместо этого контроллер датчика выхлопных газов может преобразовать асимметричную реакцию в симметричную. Преобразованный симметричный отклик далее можно применить в качестве входного сигнала для регулировки параметров упреждающего контроллера и последующей настройки впрыска топлива в двигатель.
На Фиг. 9 изображены примеры графиков деградировавшего асимметричного фильтрующего отклика и трансформированного симметричного фильтрующего отклика. В частности, на графике 902 изображена заданная лямбда (линия 906), ожидаемая лямбда (линия 908) и деградировавшая лямбда (линия 910) подобно значениям, описанным со ссылкой на Фиг. 2-7. Как видно по линии 908, ожидаемая лямбда симметрична относительно стехиометрического соотношения (т.е. лямбда = 1). Другими словами, амплитуда 912 пика обеднения и амплитуда 914 пика обогащения ожидаемой лямбды (т.е. ожидаемого отклика) практически равны.
Деградировавшая лямбда, показанная линией 910, демонстрирует асимметричную фильтрующую деградацию перехода обогащение-обеднение, при этом скорость реакции на заданное изменение воздушно-топливного соотношения запаздывает в направлении перехода обогащение-обеднение. Деградировавшая лямбда (т.е. деградировавший отклик) является симметричной относительно стехиометрического соотношения. В частности, амплитуда 916 пика обеднения и амплитуда 914 пика обогащения не равны. Поскольку асимметричная фильтрующая деградация присутствует в направлении перехода обогащение-обеднение, амплитуды пиков обогащения ожидаемого отклика (линия 908) и деградировавшего отклика (линия 910) практически одинаковые. Однако амплитуда 916 пика обеднения деградировавшего отклика (линия 910) меньше, чем амплитуда 912 пика обеднения ожидаемого отклика (линия 908). Таким образом, как изображено линией 918, асимметричная фильтрующая деградация приводит к отклонению работы системы двигателя от стехиометрического соотношения.
Асимметричный деградировавший отклик (линия 910) включает в себя более быструю часть 920 и более медленную часть 922 отклика. На более быстром участке 920 деградировавший отклик (линия 910) следует за ожидаемым откликом (линия 908). Другими словами, крутизна более быстрой части 920 деградировавшего отклика практически равна крутизне ожидаемого отклика. На более медленном участке 922 крутизна деградировавшего отклика (910) меньше, чем крутизна ожидаемого отклика (908), что приводит к меньшей амплитуде 916 пика обеднения. Таким образом, для поведения деградации фильтрующего типа перехода обогащение-обеднение деградировавший отклик демонстрирует более медленную реакцию лишь в направлении перехода обогащение-обеднение, в то время как другое направление (т.е. обеднение-обогащение) демонстрирует более быструю или ожидаемую скорость реакции.
Как будет сказано далее, в ответ на асимметричный отклик деградации фильтрующего типа (например, изображенный на графике 902) контроллер (например, специальный контроллер 140 или контроллер 12 с Фиг. 1) может трансформировать или конвертировать асимметричный отклик в более симметричный. Конвертированный симметричный отклик может быть основан на значении (например, постоянной времени) асимметричного отклика. На графике 904 изображен пример симметричной реакции (линия 928), возникающей из преобразования асимметричного отклика (910), изображенной на графике 902.
В частности, на графике 904 изображены те же самые заданная лямбда и ожидаемая лямбда, что и на графике 902 (линии 924 и 926 соответственно). Кроме того, на графике 904 отфильтрованная или преобразованная деградировавшая лямбда (т.е. деградировавший отклик) показана линией 928. Трансформированный деградировавший отклик может быть получен путем фильтрации более быстрой части 920 (т.е. неискаженной части) асимметричного деградировавшего отклика (линия 910) по некоторому значению, основанному на постоянной времени более медленного участка 922 (т.е. деградировавшей части) асимметричного деградировавшего отклика. В результате применения данного фильтра трансформированный деградировавший отклик (линия 928) становится более симметричным относительно стехиометрического соотношения, чем деградировавший отклик, показанный линией 910. Как показано линией 928, амплитуда 930 пика обеднения и амплитуда 932 пика обогащения практически равны. В других примерах, амплитуда 930 пика обеднения и амплитуда 932 пика обогащения преобразованного деградировавшего отклика могут находиться в пределах пороговых значений друг друга. Данный порог может быть меньше, чем разница между амплитудой 914 пика обогащения и амплитудой 916 пика обеднения асимметричного деградировавшего отклика (линия 910). Более подробно способ преобразования асимметричного отклика деградации фильтрующего типа для датчика выхлопных газов до более симметричного отклика представлены на Фиг. 10.
В других примерах датчик выхлопных газов может иметь асимметричную фильтрующую деградацию в обоих направлениях перехода. Например, переход обеднение-обогащение может деградировать на первое значение (т.е. иметь первую постоянную времени), а переход обогащение-обеднение может деградировать на второе значение (т.е. иметь вторую постоянную времени), при этом первое и второе значения отличаются. В одном примере первая постоянная времени может быть больше, чем вторая постоянная времени, что приводит к более медленной реакции в направлении обеднение-обогащение, чем в направлении обогащение-обеднение. В данном примере направление перехода обеднение-обогащение может быть отфильтровано так, что он будет иметь постоянную времени, равную второй постоянной времени. В данном случае асимметричный отклик может стать более симметричным относительно стехиометрического соотношения.
При этом способ работы двигателя может включать в себя регулировку впрыска топлива в зависимости от модифицированного сигнала обратной связи по содержанию кислорода в выхлопных газах, полученного от датчика выхлопных газов. Этот сигнал обратной связи модифицирован путем трансформации асимметричного отклика от датчика выхлопных газов в более симметричный отклик. Асимметричный отклик может являться асимметричным откликом деградации фильтрующего типа. В одном примере преобразование асимметричного отклика в более симметричный отклик может включать в себя фильтрацию неискаженной части асимметричного отклика по некоторому значению на основе постоянной времени деградировавшей части асимметричного отклика. Также способ может включать в себя регулировку одного или нескольких параметров упреждающего контроллера датчика выхлопных газов на основании модифицированного симметричного отклика. В одном примере один или несколько параметров могут включать в себя пропорциональный коэффициент усиления, интегральный коэффициент усиления, постоянную времени контроллера и время задержки контроллера. Также один или несколько регулируемых параметров упреждающего контроллера можно применить к обоим направлениям перехода (т.е. обеднение-обогащение и обогащение-обеднение) Способ также может включать в себя определение воздушно-топливного соотношения с помощью датчика выхлопных газов и регулировку впрыска топлива на основе определенного соотношения.
На Фиг. 10 изображен способ 1000 преобразования асимметричного отклика деградации фильтрующего типа датчика выхлопных газов до более симметричного отклика фильтрующего типа. Способ 1000 может быть выполнен системой управления транспортного средства, например, контроллером 12 и/или специальным контроллером 140, для контроля характеристики воздушно-топливного соотношения посредством такого датчика, как датчик 126 выхлопных газов.
Способ 1000 начинается с этапа 1002, в котором производится определение условий работы двигателя. Условия работы двигателя можно определить на основании обратной связи от различных датчиков двигателя. Они могут включать в себя скорость вращения и нагрузку на двигатель, воздушно-топливное соотношение, температуру и т.д. Способ 1000 далее переходит к этапу 1004. На основании условий, определенных на этапе 1002, способ 1000 на этапе 1004 определяет условия мониторинга датчика выхлопных газов. В одном примере способ может определить, включен ли двигатель, и совпадают ли выбранные условия. Например, выбранными условиями может быть то, что входные параметры находятся в рабочем состоянии и/или что датчик выхлопных газов находится при рабочей температуре, при которой он способен обеспечивать точные показания. Также выбранными условиями может быть то, что горение осуществляется в цилиндрах двигателя, т.е. что он находится не в режиме остановки, как в случае отсечки топлива в режиме замедления (DFSO), либо что двигатель работает в установившемся режиме.
Если будет определено, что двигатель не работает и/или выбранные условия не соответствуют действительности, способ 1000 возвращается к началу и не производит контроль датчика выхлопных газов. Однако если на этапе 1004 условия датчика выхлопных газов соблюдены, то способ переходит к этапу 1006 для сбора входных и выходных данных от датчика выхлопных газов. Сюда может входить сбор и хранение данных о воздушно-топливном соотношении (т.е. о лямбде), зарегистрированных датчиком. На этапе 1006 способ может продолжать работу до получения необходимого количества значений (например, данных о воздушно-топливном соотношении) для определения деградации на этапе 1008.
На этапе 1008 способ 1000 включат в себя определение на основании собранных датчиком данных, присутствует ли деградация датчика. На этапе 1008 способ также может определять тип или поведение деградации датчика выхлопных газов (фильтрующий или запаздывающий тип). Как было сказано выше для определения деградации могут применяться различные способы. В одном примере деградацию можно определить на основании временной задержки и длины линии каждой выборки данных датчика выхлопных газов, собранных при заданном изменении воздушно-топливного соотношения. Деградировавшие значения времени задержки и постоянной времени наряду с длиной линии могут быть получены из отклика датчика выхлопных газов, после чего их можно сравнить с ожидаемыми значениями. Например, если деградировавшее значение времени задержки превышает ожидаемое, то датчик выхлопных газов может определить деградацию запаздывающего типа (т.е. деградацию времени задержки). Если определенная длина линии больше ожидаемой, то датчик выхлопных газов может демонстрировать деградацию фильтрующего типа (т.е. деградация постоянной времени). В другом примере, если длина линии превышает ожидаемую в обоих направлениях перехода (т.е. обеднение-обогащение и обогащение-обеднение), то датчик выхлопных газов может демонстрировать асимметричное фильтрующее поведение деградации.
В другом примере деградация датчика выхлопных газов может быть определена путем мониторинга характеристик распределения предельных значений от множества успешных выборок значений лямбды в установившихся условиях работы. Характеристикой может являться мода и центральный пик обобщенного распределения предельных значений (GEV) перепадов лямбды, собранных в установившемся режиме работы. Величина центрального пика и моды наряду с определенными значениями постоянной времени и времени задержки могут указывать на тип деградации, а также на ее степень.
В другом примере деградация датчика выхлопных газов может быть определена на основании разности между первым набором определенных параметров модели сжигания обогащенной топливной смеси и второго набора параметров модели сжигания бедной топливной смеси. Определенные параметры могут включать в себя постоянную времени, время задержки и статический коэффициент усиления как для заданной лямбды (воздушно-топливного соотношения), так и для определенной лямбды (т.е. определенной на выходе датчика выхлопных газов). Тип деградации датчика выхлопных газов (например, фильтрующий или запаздывающий, симметричный или асимметричный) можно определить на основе различий в определенных параметрах. Следует отметить, что для определения деградации выхлопных газов можно использовать альтернативный способ.
После выполнения одного или нескольких вышеуказанных способов, способ продолжается на этапе 1010, определяя наличие асимметричной деградации (т.е. деградация постоянной времени в обоих направлениях перехода). Если асимметричная фильтрующая деградация не обнаружена, то способ продолжается на этапе 1012, в котором он переходит к этапу 1102 с Фиг. 11 для определения типа деградации и последующей регулировки параметров упреждающего контроллера. В противном случае, если на этапе 1010 была обнаружена фильтрующая деградация, то способ переходит к этапу 1014 для преобразования деградировавшей асимметричного отклика (т.е. отклика от датчика выхлопных газов, который свидетельствует об асимметричной деградации фильтрующего типа) в симметричный отклик.
На этапе 1014 способ может включать в себя трансформацию асимметричного деградировавшего отклика в эквивалентный симметричный деградировавший отклик. Преобразованный деградировавший отклик может быть получен путем фильтрации наиболее быстрого участка перехода (неискаженного) асимметричного деградировавшего отклика по величине, основанной на постоянной времени более медленного (деградировавшего) участка асимметричного деградировавшего отклика. Другими словами, деградация может быть введена в неискаженное направление перехода так, чтобы результирующий отклик был деградировавшим в обоих направлениях (т.е. в направлениях обеднение-обогащение и обогащение-обеднение). Например, если асимметричный фильтрующий отклик деградации является асимметричным откликом фильтрующего типа для направления обеднение-обогащение, то переход обеднение-обогащение является медленным по сравнению с ожидаемым откликом, в то время как переход обогащение-обеднение не является деградировавшим (т.е. быстрый). Таким образом, в данном примере переход обогащение-обеднение может быть отфильтрован на основании величины (например, постоянной времени) медленного перехода обеднение-обогащение. Конечным результатом фильтрации неискаженной части асимметричного отклика может являться симметричный фильтрующий отклик деградации с такой же амплитудой или постоянной времени, что и деградировавший участок асимметричного отклика деградации фильтрующего типа.
В одном примере на этапе 1014 способ может включать в себя определение амплитуды (например, постоянной времени) и направления деградировавшего отклика (обеднение-обогащение или обогащение-обеднение). Любые из описанных выше способов определения деградации датчика можно применять для определения амплитуды и направления асимметричного отклика деградации фильтрующего типа. Далее асимметричный отклик деградации фильтрующего типа может быть отфильтрован в неискаженном направлении по величине на основании деградировавшей постоянной времени. В одном примере функция или алгоритм может выполнить фильтрацию необработанного асимметричного отклика фильтрующего типа, деградировавшей постоянной времени, и требуемого периода опроса для новой симметричного отклика фильтрующего типа как входные данные. Как было сказано выше, результирующий отклик может быть симметричным откликом деградации фильтрующего типа, который демонстрирует деградацию практически такой же амплитуды, что и неотфильтрованный деградировавший отклик в обоих направлениях перехода. Например, если деградировавший отклик определена как фильтрующая характеристика деградации в направлении перехода обогащение-обеднение, то деградировавший отклик является отфильтрованным в направлении обеднение-обогащение. И наоборот, если деградировавший отклик определен как фильтрующий отклик деградации в направлении перехода обеднение-обогащение, то деградировавший отклик является отфильтрованным в направлении обогащение-обеднение.
После преобразования асимметричного отклика деградации фильтрующего типа в симметричный, способ продолжается на этапе 1016 для применения параметров упреждающего контроллера датчика выхлопных газов на основании модифицированного симметричного отклика. Способ продолжается на этапе 1102 с Фиг. 11.
Как было сказано ранее, параметры упреждающего контроллера могут быть отрегулированы на основе типа деградации датчика кислорода (например, деградация фильтрующего или запаздывающего типа). Например, интегральный коэффициент усиления может быть отрегулирован как согласно деградации запаздывающего типа, так и согласно деградации фильтрующего типа. Регулировка интегрального коэффициента усиления может быть основана на одном или нескольких деградировавших значениях времени задержки и постоянной времени. Пропорциональный коэффициент усиления может быть отрегулирован на первое значение согласно деградации запаздывающего типа и на второе значение согласно деградации фильтрующего типа, при этом первое значение отличается от второго. Регулировка пропорционального коэффициента усиления на первое значение может быть основано на деградировавшем времени задержки, в то время как регулировка пропорционального коэффициента усиления на второе значение может быть основана на деградировавшей постоянной времени. Постоянная времени контроллера может быть настроена согласно деградации фильтрующего типа, а не деградации запаздывающего типа. Регулировка постоянной времени контроллера может быть основана на деградировавшей постоянной времени. И наконец, время задержки контроллера может быть отрегулировано на первое значение при деградации фильтрующего типа, и на второе значение при деградации запаздывающего типа. Регулировка времени задержки контроллера на первое значение может быть основано на деградировавшей постоянной времени, в то время как регулировка времени задержки контроллера на второе значение может быть основано на деградировавшем времени задержки.
На Фиг. 11 проиллюстрирован способ 1100 регулировки параметров упреждающего контроллера датчика выхлопных газов, основанный на типе и степени деградации. Способ 1100 продолжается либо с этапа 1012, либо с этапа 1016 с Фиг. 10, при этом либо не обнаружено асимметричной деградации фильтрующего типа, либо асимметричный фильтрующий отклик был преобразован в симметричный фильтрующий отклик соответственно.
На этапе 1102 способ включает в себя определение того, была ли обнаружена фильтрующая деградация (т.е. деградация постоянной времени). Если фильтрующая деградация не обнаружена, то способ переходит к этапу 1104 для определения, обнаружена ли деградация запаздывающего типа (т.е. деградация времени задержки). Если деградация запаздывающего типа также не была обнаружена, то на этапе 1106 способ указывает, что деградация датчика не обнаружена. Параметры упреждающего контроллера сохраняются и способ возвращается к началу, продолжая следить за параметрами датчика выхлопных газов.
Возвращаясь к этапу 1102, если была обнаружена деградация фильтрующего типа, то способ продолжается на этапе 1108 для приближения системы к первому порядку с моделью задержки (например, FOPD). Сюда может входить применение половинной аппроксимации к номинальной постоянной времени, номинальному времени задержки и деградировавшей постоянной времени для определения эквивалентных значений постоянной времени и времени задержки первого порядка. Способ может также включать в себя определение регулируемых коэффициентов усиления контроллера. Дальнейшие подробности по способу на этапе 1108 представлены на Фиг. 12.
В ином случае, если на этапе 1104 определена деградация запаздывающего типа, то способ переходит к этапу 1110 для определения эквивалентного или нового значения времени задержки в присутствии деградации. Способ также включает в себя определение регулируемых параметров упреждающего контроллера, к которым относятся коэффициенты усиления контроллера, постоянная времени и время задержки (используется при компенсации задержки). Дальнейшие подробности по способу на этапе 1110 представлены на Фиг. 13.
Из этапов 1108 и 1110 способ 1100 переходит к этапу 1112 для применения обновленных параметров упреждающего контроллера. Датчик выхлопных газов может далее использовать эти параметры в упреждающем контроллере для определения измеренного воздушно-топливного соотношения. На этапе 1114 способ включает в себя определение воздушно-топливного соотношения с помощью датчика выхлопных газов и регулировку количества и/или момента впрыска топлива на основании определенного ранее соотношения. Например, сюда может входить увеличение количества впрыскиваемого форсунками топлива, если воздушно-топливное соотношение превышает пороговое значение. В другом примере сюда может входить уменьшение количества впрыскиваемого форсунками топлива, если воздушно-топливное соотношение меньше порогового значения. В некоторых вариантах, если деградация датчика превышает пороговое значение, то способ 1100 может включать в себя уведомление водителя на этапе 1116. Пороговое значение может включать в себя деградировавшие постоянную времени и/или время задержки. К уведомлению водителя на этапе 1116 может относиться отправка сообщения или запроса на техобслуживание датчика выхлопных газов.
На Фиг. 12 изображен способ 1200 определения регулируемых параметров упреждающего контроллера датчика выхлопных газов на основе деградации фильтрующего типа. Способ 1200 может быть выполнен контроллером 12 и/или специальным контроллером 140, а также на этапе 1108 вышеописанного способа 1100. На этапе 1202 способ 1200 определяет ухудшенное значение постоянной времени TC-f и номинальное значение постоянной времени TC-nom. Как было сказано ранее, номинальная постоянная времени может являться значением, указывающим на то, как быстро датчик реагирует на заданное изменение параметра лямбда, и может быть определена отдельно на основании неискаженного отклика датчика. Деградировавшая постоянная времени может быть оценена любым из способов определения деградации на этапе 1008 способа 1000, как было описано выше.
После определения деградировавшей постоянной времени TC-F и номинальной постоянной времени ТС-nom способ 1200 переходит к этапу 1204 для аппроксимации системы второго порядка с моделью первого порядка (например, FOPD). Способ 1204 может включать в себя применение половинной аппроксимации к деградировавшей системе. Данный тип аппроксимации включает в себя распределение меньшей постоянной времени (между номинальной и деградировавшей) между большей постоянной времени и номинальным временем задержки. Это может быть выполнено с помощью следующих уравнений:


Если деградировавшая постоянная времени TC-F меньше номинальной ТС-nom, то уравнение примет вид:

На этапе 1206 контроллер может заменить постоянную времени TC-SP и время задержки TD-SP, используемые в компенсаторе задержки SP (в упреждающем контроллере) на определенные эквивалентные значения постоянной времени TC-Equiv и времени задержки TD-Equiv.
На этапе 1208 контроллер определяет промежуточный множитель alpha упреждающего контроллера. Промежуточный множитель определяется по следующему уравнению:
Промежуточный множитель alpha можно использовать на этапе 1210 для определения интегрального коэффициента усиления KI упреждающего контроллера. Интегральный коэффициент усиления KI определяют по следующему уравнению:

Где KI-nom - номинальный интегральный коэффициент усиления упреждающего контроллера. Поскольку alpha=1 для деградации фильтрующего типа, то KI остается равным номинальному значению.
Наконец, на этапе 1212 контроллер определяет пропорциональный коэффициент усиления KP на основе интегрального коэффициента усиления, а также эквивалентной постоянной времени TC-Equiv Пропорциональный коэффициент усиления KP определяют по следующему уравнению:

Поскольку величина деградации фильтрующего типа растет (поскольку увеличивается деградировавшая постоянная времени), то эквивалентная постоянная времени TC-Equiv увеличивается, тем самым, увеличивая KP. После определения новых параметров упреждающего контроллера, способ возвращается к этапу 1108 способа 1100 и продолжается на этапе 1112, применяя новые параметры контроллера.
В данном случае коэффициенты усиления, постоянная времени и время задержки упреждающего контроллера могут быть отрегулированы на основе уровня и типа деградации. В частности, для фильтрующего типа деградации (т.е. деградации постоянной времени), пропорциональный коэффициент усиления, интегральный коэффициент усиления, постоянная времени и время задержки контроллера (TC-SP и TD-SP) могут быть отрегулированы на основе деградировавшей постоянной времени.
На Фиг. 13 изображен способ 1300 определения регулируемых параметров упреждающего контроллера датчика выхлопных газов на основании запаздывающей деградации. Способ 1300 может быть выполнен контроллером 12 и/или специальным контроллером 140, а также на этапе 1110 вышеописанного способа 1100. На этапе 1302 способ 1300 определяет деградировавшее время задержки TD-F и номинальное время задержки TD-nom. Как было сказано ранее, номинальное время задержки датчика является ожидаемой задержкой реакции датчика на заданное изменение воздушно-топливного соотношения на основании задержки с момента впрыска топлива, сгорания и выхода выхлопных газов из камеры сгорания к датчику выхлопных газов. Деградировавшее время задержки TD-F может быть оценено любым из способов определения деградации на этапе 1008 способа 1000, как было описано выше.
После определения деградировавшего времени задержки TD-F и номинального времени задержки TD-nom способ 1300 переходит к этапу 1304 для определения эквивалентного времени задержки TD-Equiv на основе деградировавшего времени задержки Td-F и номинального времени задержки TD-nom. Эквивалентное время задержки TD-Equiv может быть определено по следующей формуле:

В данном случае эквивалентное время задержки является добавочным временем задержки (т.е. деградировавшим временем задержки) после ожидаемого времени задержки (т.е. номинального времени задержки).
Постоянная времени может не измениться в случае деградации запаздывающего типа. Таким образом, на этапе 1306 эквивалентная постоянная времени TC-Equiv может быть установлена как номинальное значение постоянной времени TC-nom. На этапе 1308 контроллер может заменить постоянную времени TC-SP и время задержки TD-SP, используемые в компенсаторе SP задержки (в упреждающем контроллере) на определенные эквивалентные значения постоянной времени TC-Equiv и времени задержки TD-Equiv Для случая деградации запаздывающего типа постоянная времени TC-SP контроллера может оставаться неизменной.
На этапе 1310 контроллер определяет промежуточный множитель alpha упреждающего контроллера. Промежуточный множитель может быть основана на деградированном времени задержки и номинальном времени задержки. Промежуточный множитель определяется по следующему уравнению:
Промежуточный множитель alpha можно использовать на этапе 1312 для определения интегрального коэффициента усиления KI упреждающего контроллера. Интегральный коэффициент усиления KI определяют по следующему уравнению:

Где KI-nom - номинальный интегральный коэффициент усиления упреждающего контроллера. Поскольку степень деградации запаздывающего типа (например, значение TDF) увеличивается, то alpha может уменьшаться. Это, в свою очередь, приводит к уменьшению интегрального коэффициента усиления. Таким образом, интегральный коэффициент усиления может уменьшаться на большее значение, поскольку увеличивается деградировавшее время задержки TD-F и степень деградации запаздывающего типа.
Наконец, на этапе 1314 контроллер определяет пропорциональный коэффициент усиления KP на основе интегрального коэффициента усиления, а также эквивалентной постоянной времени TC-Equiv Пропорциональный коэффициент усиления KP определяют по следующему уравнению:

Поскольку эквивалентная постоянная времени TC-Equiv не может изменяться для деградации запаздывающего типа, пропорциональный коэффициент усиления KP может быть основан на значении интегрального коэффициента усиления KI. Таким образом, по мере уменьшения KI с увеличением деградировавшего времени задержки TD-F пропорциональный коэффициент усиления KP также может уменьшиться. После определения новых параметров упреждающего контроллера, способ возвращается к этапу 1110 способа 1100 и продолжается на этапе 1112, применяя новые параметры контроллера.
В данном случае коэффициенты усиления, постоянная времени и время задержки упреждающего контроллера могут быть отрегулированы на основе уровня и типа деградации. В частности, для деградации запаздывающего типа (т.е. деградации времени задержки), пропорциональный коэффициент усиления, интегральный коэффициент усиления и время задержки (TD-SP) контроллера могут быть отрегулированы на основе деградировавшей постоянной времени, при этом постоянная времени (TC-SP) контроллера может оставаться неизменной.
Как было сказано ранее, способ работы двигателя может включать в себя регулировку впрыска топлива согласно обратной связи по содержанию кислорода в выхлопных газах от датчика выхлопных газов и преобразование асимметричного отклика деградации датчика выхлопных газов в более симметричный отклик деградации на основании амплитуды и направления асимметричного отклика. Например, асимметричный отклик деградации может быть асимметричным откликом фильтрующего типа с деградировавшей скоростью реакции лишь в одном направлении перехода. Преобразование асимметричного отклика деградации в более симметричный может включать в себя фильтрацию неискаженного перехода асимметричного отклика и сохранение без фильтрации деградировавшего перехода асимметричного отклика. В одном примере фильтрация неискаженного перехода асимметричного отклика может включать в себя фильтрацию перехода обогащение-обеднение с помощью фильтра низких частот, когда деградировавший переход имеет направление обеднение-обогащение. В другом примере фильтрация неискаженного перехода асимметричного отклика может включать в себя фильтрацию перехода обеднение-обеднение, когда деградировавший переход имеет направление обогащение-обеднение. Также недеградировавший переход асимметричного отклика деградации может быть отфильтрован некоторым значением на основании амплитуды деградировавшего перехода асимметричного отклика. В одном примере амплитуда деградировавшего перехода может быть основана на его постоянной времени. Также способ может включать в себя регулировку одного или нескольких параметров упреждающего контроллера датчика выхлопных газов на основании более симметричного отклика. В одном примере регулировка одного или нескольких параметров упреждающего контроллера может включать в себя применение одного или нескольких параметров в обоих направлениях перехода (обеднение-обогащение и обогащение-обеднение).
В данном случае асимметричный отклик деградации фильтрующего типа датчика выхлопных газов может быть трансформирован в модифицированный симметричный фильтрующий отклик деградации. В частности, при определении, что датчик выхлопных газов деградировал, и что тип деградации является асимметричным фильтрующим типом, контроллер может преобразовать асимметричный фильтрующий отклик деградации в симметричный отклик. Преобразование может включать в себя фильтрацию симметричного отклика деградации фильтрующего типа по величине, которая основана на амплитуде и направлении асимметричного отклика деградации фильтрующего типа. Амплитудой асимметричного отклика деградации фильтрующего типа может являться значение постоянной времени, а ее направление может быть направление перехода (например, обеднение-обогащение или обогащение-обеднение), который был подвержен деградации. Например, контроллер может отфильтровать лишь недеградировавший переход асимметричного отклика фильтрующего типа. Фильтр или степень фильтрации может зависеть от постоянной времени (ее величины) деградировавшего участка асимметричного отклика деградации фильтрующего типа. Параметры упреждающего контроллера датчика выхлопных газов далее могут быть отрегулированы в обоих направлениях перехода на основе преобразованной симметричного отклика деградации фильтрующего типа. После применения регулируемых параметров контроллера контроллер двигателя может отрегулировать момент и/или количество впрыска топлива на основе сигнала воздушно-топливного соотношения от датчика выхлопных газов. Преобразование асимметричного отклика деградации фильтрующего типа в эквивалентную симметричный отклик может уменьшить работы по калибровке датчика выхлопных газов, при этом уменьшая выбросы NOx и СО двигателя.
Можно отметить, что примеры управляющих и оценочных программ, приведенные в данном описании, могут быть использованы для различных конфигураций двигателей и/или систем транспортного средства. Конкретные программы, могут включать в себя один или более алгоритмов обработки из любого количества аналитических стратегий, таких как управление событиями, управление прерываниями, многозадачность, многопоточность и подобные. Таким образом, различные шаги, операции или функции могут быть выполнены в приведенной последовательности, параллельно, или в некоторых случаях могут быть исключены. Аналогичным образом, данный порядок обработки не обязательно должен соблюдаться для достижения целей, характеристик или преимуществ, описанных в данном документе, но предоставлен для простоты иллюстрирования и описания. Один или более из приведенных шагов или функций могут выполняться многократно, в зависимости от конкретного используемого алгоритма. Кроме того, описанные действия могут графически представлять программный код для записи на машиночитаемый носитель данных в системе управления двигателем
Следует понимать, что описанные здесь конфигурации и программы являются примерными по свое сути, и точное их воспроизведение не рассматривается как единственно возможное, так как допускаются различные вариации. Например, описанная выше технология может применяться к двигателям V-6, I-4, I-6, V-12, оппозитному четырехцилиндровому и другим типам двигателя. Предметом настоящего изобретения являются все новые и неочевидные комбинации и подкомбинации различных систем и конфигураций, и другие особенности, функции и/или свойства, описанные выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ ТОПЛИВНОЙ СОСТАВЛЯЮЩЕЙ ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ | 2015 |
|
RU2694995C2 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ДАТЧИКА ВЫХЛОПНЫХ ГАЗОВ | 2013 |
|
RU2621848C2 |
| НЕАГРЕССИВНЫЙ КОНТРОЛЬ ДАТЧИКА ОТРАБОТАВШИХ ГАЗОВ | 2013 |
|
RU2642952C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫЯВЛЕНИЯ ДЕГРАДАЦИИ ДАТЧИКА КИСЛОРОДА ИЗ-ЗА ВЫДЕЛЕНИЯ ГАЗА ИЗ ГЕРМЕТИКА | 2018 |
|
RU2698855C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПРЕДЕЛЬНОГО УРОВНЯ ДЕГРАДАЦИИ КАТАЛИТИЧЕСКОГО НЕЙТРАЛИЗАТОРА (ВАРИАНТЫ) | 2015 |
|
RU2701626C2 |
| СПОСОБ КОНТРОЛЯ ДАТЧИКА ОТРАБОТАВШИХ ГАЗОВ (ВАРИАНТЫ), СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2673648C2 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ПРЕЖДЕВРЕМЕННОГО ЗАЖИГАНИЯ | 2011 |
|
RU2566683C2 |
| СПОСОБ ПРОДУВКИ КОНДЕНСАТА ИЗ ОХЛАДИТЕЛЯ НАДДУВОЧНОГО ВОЗДУХА | 2014 |
|
RU2639431C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2689500C2 |
| СПОСОБ ПРОДУВКИ КОНДЕНСАТА ИЗ ОХЛАДИТЕЛЯ НАДДУВОЧНОГО ВОЗДУХА | 2014 |
|
RU2641784C2 |
Изобретение относится к датчику выхлопных газов, установленному в автомобильном транспортном средстве, и способу мониторинга работы датчика выхлопных газов. Предложены способы и системы преобразования асимметричного отклика деградации датчика выхлопных газов до более симметричного отклика деградации. В одном примере способ включает в себя регулировку впрыска топлива в двигатель в ответ на модифицированный сигнал обратной связи по содержанию кислорода в выхлопных газах, полученный от датчика выхлопных газов. Этот сигнал обратной связи изменен путем преобразования асимметричного отклика от датчика выхлопных газов в более симметричный отклик. Также способ может включать в себя регулировку одного или нескольких параметров упреждающего контроллера датчика выхлопных газов на основании модифицированного симметричного отклика. Техническим результатом является достижение стабильности в работе замкнутой системы. 3 н. и 17 з.п. ф-лы, 13 ил.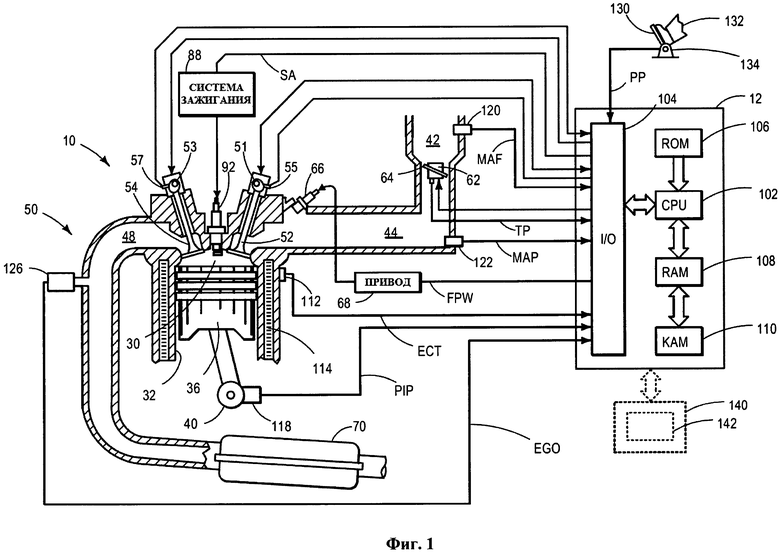
1. Способ эксплуатации двигателя, включающий этап, на котором:
регулируют впрыск топлива в зависимости от сигнала обратной связи по содержанию кислорода в выхлопных газах, полученного от датчика выхлопных газов, причем сигнал обратной связи по содержанию кислорода в выхлопных газах модифицирован путем преобразования асимметричной части сигнала обратной связи по содержанию кислорода в выхлопных газах в более симметричный сигнал, причем этап регулирования впрыска топлива включает замену параметра постоянной времени и параметра задержки в компенсаторе задержки типа предиктора Смита.
2. Способ по п. 1, в котором асимметричная часть представляет собой асимметричный отклик деградации фильтрующего типа, причем способ дополнительно включает этап регулирования параметра интегрального коэффициента усиления контроллера, с помощью которого регулируют впрыск топлива, на основании номинальной временной задержки, деленной на номинальную временную задержку плюс деградировавшую временную задержку.
3. Способ по п. 1, в котором преобразование асимметричной части в более симметричный сигнал включает фильтрацию недеградировавшей части асимметричной части сигнала обратной связи по содержанию кислорода в выхлопных газах на величину на основании постоянной времени деградировавшей части асимметричной части сигнала обратной связи по содержанию кислорода в выхлопных газах.
4. Способ по п. 1, в котором на основании более симметричного сигнала дополнительно регулируют один или более параметров упреждающего контроллера датчика выхлопных газов.
5. Способ по п. 4, в котором один или более параметров включает в себя пропорциональный коэффициент усиления, интегральный коэффициент усиления, постоянную времени контроллера и время задержки контроллера.
6. Способ по п. 4, в котором дополнительно применяют один или более отрегулированных параметров упреждающего контроллера в обоих направлениях перехода.
7. Способ по п. 1, в котором дополнительно определяют воздушно-топливное соотношение с помощью датчика выхлопных газов и регулируют впрыск топлива на основании определенного воздушно-топливного соотношения.
8. Способ эксплуатации двигателя, включающий этапы, на которых:
регулируют впрыск топлива в зависимости от обратной связи по содержанию кислорода в выхлопных газах от датчика выхлопных газов, и
преобразовывают асимметричную часть деградации сигнала от датчика выхлопных газов в более симметричный сигнал, причем преобразование ассиметричной части деградации сигнала включает регулирование сигнала от датчика выхлопных газов на основании амплитуды и направления асимметричной части деградации сигнала, причем регулирование впрыска топлива включает замену параметра постоянной времени и параметра задержки в компенсаторе задержки типа предиктора Смита.
9. Способ по п. 8, в котором более симметричный сигнал включает в себя асимметричный отклик деградации фильтрующего типа с деградировавшей скоростью отклика лишь в одном направлении перехода.
10. Способ по п. 9, в котором преобразование асимметричной части сигнала от датчика выхлопных газов в более симметричный сигнал включает фильтрацию недеградировавшего перехода асимметричной части деградации сигнала от датчика выхлопных газов и отсутствие фильтрации деградировавшего перехода асимметричной части деградации сигнала от датчика выхлопных газов.
11. Способ по п. 10, в котором фильтрация недеградировавшего перехода асимметричной части деградации сигнала от датчик выхлопных газов включает фильтрацию перехода от обогащения к обеднению с помощью фильтра низких частот, когда деградировавший переход имеет направление от обеднения к обогащению.
12. Способ по п. 10, в котором фильтрация недеградировавшего перехода асимметричной части деградации сигнала от датчика выхлопных газов включает фильтрацию перехода от обеднения к обогащению, и дополнительно регулируют параметр интегрального коэффициента усиления контроллера, с помощью которого регулируют впрыск топлива, на основании номинальной временной задержки, деленной на номинальную временную задержку, плюс деградировавшую временную задержку.
13. Способ по п. 10, в котором этап фильтрации включает фильтрацию недеградировавшего перехода асимметричной части деградации сигнала от датчика выхлопных газов на величину на основании амплитуды деградировавшего перехода асимметричной части деградации сигнала от датчика выхлопных газов.
14. Способ по п. 13, в котором амплитуда деградировавшего перехода основана на постоянной времени деградировавшего перехода.
15. Способ по п. 8, в котором дополнительно регулируют один или более параметров упреждающего контроллера датчика выхлопных газов в зависимости от более симметричного сигнала.
16. Способ по п. 15, в котором при регулировке одного или более параметров упреждающего контроллера применяют один или более параметров как в направлении перехода от обеднения к обогащению, так и в направлении от обогащения к обеднению.
17. Система для транспортного средства, содержащая:
двигатель с системой впрыска топлива,
датчик выхлопных газов, соединенный с выхлопной системой двигателя и имеющий упреждающий контроллер, и
контроллер, содержащий команды, хранящиеся в постоянной памяти и выполняемые для преобразования в контроллере асимметричного сигнала деградации датчика выхлопных газов в модифицированный симметричный сигнал деградации на основании амплитуды и направления асимметричного сигнала деградации, а также дополнительно содержащий команды для регулирования параметра интегрального коэффициента усиления контроллера, с помощью которого регулируют впрыск топлива, на основании номинальной временной задержки, деленной на номинальную временную задержку плюс деградировавшую временную задержку.
18. Система по п. 17, в которой команды, выполняемые для преобразования асимметричного сигнала деградации, включают фильтрацию недеградировавшего направления перехода асимметричного сигнала деградации на основании постоянной времени деградировавшего направления перехода асимметричного сигнала деградации.
19. Система по п. 17, в которой команды дополнительно включают регулировку одного или более параметров упреждающего контроллера в зависимости от модифицированного симметричного сигнала деградации, причем величина регулировки основана на амплитуде модифицированного симметричного сигнала деградации.
20. Система по п. 17, выполненная с возможностью регулировки количества топлива и/или регулировки синхронизации системы впрыска топлива на основании сигнала обратной связи по содержанию кислорода в выхлопных газах от упреждающего контроллера и дополнительно содержащая команды для замены параметра постоянной времени и параметра задержки в компенсаторе задержки типа предиктора Смита в контроллере.
| СПОСОБ И УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕЦИРКУЛЯЦИИ ВЫХЛОПНЫХ ГАЗОВ И КЛАПАН, А ТАКЖЕ СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ | 1999 |
|
RU2230212C2 |
| US 6481427 B1, 19.11.2002 | |||
| US 20120004827 A1, 05.01.2012 | |||
| US 20070227123 A1, 04.10.2007 | |||
| US 20070119413 A1, 31.05.2007. | |||

