Настоящее изобретение относится к способу и устройству для кодирования последовательности цифровых изображений и к способу и устройству для декодирования соответствующего потока битов. Изобретение дополнительно относится к способу и устройству для извлечения информации движения, включающей в себя, по меньшей мере, один предиктор информации движения для предсказания части изображения для изображения, предсказанного посредством компенсации движения, относительно, по меньшей мере, одной части опорного изображения.
Изобретение может применяться в области техники обработки цифровых сигналов и, в частности, в области сжатия видео с использованием компенсации движения, чтобы уменьшать пространственные и временные избыточности в видеопотоках.
Множество форматов сжатия видео, таких как, например, H.263, H.264, MPEG-1, MPEG-2, MPEG-4, SVC, используют дискретное косинусное преобразование (DCT) на основе блоков и компенсацию движения, чтобы удалять пространственные и временные избыточности. Они могут упоминаться как видеоформаты с предсказанием. Каждый кадр или изображение видеосигнала разделяется на серии последовательных макроблоков, которые кодируются и могут декодироваться независимо. Серия последовательных макроблоков типично представляет собой прямоугольную часть кадра либо, если обобщать, часть кадра или весь кадр. Дополнительно, каждая серия последовательных макроблоков разделяется на макроблоки (MB), и каждый макроблок дополнительно разделяется на блоки, типично блоки по 8×8 пикселов. Кодированные кадры имеют два типа: временные предсказанные кадры (либо предсказанные из одного опорного кадра, называемые "P-кадрами", либо предсказанные из двух опорных кадров, называемые "B-кадрами") и невременные предсказанные кадры (называемые "внутренними кадрами", или "I-кадрами").
Временное предсказание состоит в нахождении в опорном кадре, предыдущем или будущем кадре видеопоследовательности, части изображения или опорной области, которая является ближайшей к блоку для кодирования. Этот этап типично известен в качестве оценки движения. Затем, блок предсказывается с использованием опорной области на этапе, типично называемом "компенсацией движения", при этом разность между блоком для кодирования и опорной частью кодируется, вместе с элементом информации движения относительно вектора движения, который указывает опорную область для использования для компенсации движения. При внутреннем предсказании кодируется направление предсказания.
Чтобы дополнительно уменьшать затраты на кодирование информации движения, вектор движения может быть кодирован с точки зрения разности между вектором движения и предиктором вектора движения, типично вычисляемым из одного или более векторов движения блоков, окружающих блок для кодирования.
В H.264 векторы движения кодируются относительно среднего предиктора, вычисленного из векторов движения, расположенных в причинном окружении блока для кодирования, например, из блоков, расположенных выше и слева от блока для кодирования. Разность, также называемая "остаточным вектором движения", между средним предиктором и вектором движения текущего блока, кодируется для того, чтобы уменьшать затраты на кодирование.
Кодирование с использованием остаточных векторов движения дает некоторую экономию скорости передачи битов, но требует того, чтобы декодер выполнял идентичное вычисление предиктора вектора движения, чтобы декодировать значение вектора движения блока для декодирования.
В последнее время, предлагаются дополнительные возможности повышения эффективности кодирования, такие как использование множества возможных предикторов векторов движения. Этот способ, зачастую называемый "конкуренцией векторов движения (MVCOMP)", состоит в определении из числа нескольких предикторов или возможных вариантов векторов движения того, какой предиктор вектора движения минимизирует затраты на кодирование, типично функцию затрат на искажение в зависимости от скорости передачи, остаточной информации движения. Остаточная информация движения содержит остаточный вектор движения, т.е. разность между фактическим вектором движения блока для кодирования и выбранным предиктором вектора движения, и элемент информации, указывающий выбранный предиктор вектора движения, такой как, например, кодированное значение индекса выбранного предиктора вектора движения. Индекс выбранного предиктора вектора движения кодируется в потоке битов с помощью унарного максимального кода на основе фиксированного размера списка.
В стандарте высокоэффективного кодирования видео (HEVC) предложена новая реализация идентичного принципа для обеспечения возможности выбора наилучшего предиктора из данного набора предикторов, состоящих из пространственных векторов движения и временных векторов движения. Эта технология упоминается в качестве усовершенствованного предсказания векторов движения (AMVP). Если некоторые предикторы из числа этих предикторов данного набора являются копиями других предикторов в наборе, копии могут удаляться, и дополнительные предикторы могут добавляться в набор, чтобы создавать новый второй набор предикторов. Добавленные предикторы могут быть комбинацией пространственных и временных предикторов, уже присутствующих в наборе, других предикторов, извлекаемых из этих пространственных и временных предикторов, или предикторов с фиксированными значениями. В завершение, дублированные предикторы второго набора предикторов удаляются, чтобы получать неизбыточные возможные варианты во втором наборе предикторов.
Сформированный второй набор предикторов значительно повышает сложность процесса извлечения. Повышенная вычислительная сложность вытекает из каскадного формирования предикторов.
Текущая HEVC-реализация использует набор предикторов векторов движения, содержащих самое большее 2 предиктора для внешнего режима и самое большее 5 предикторов для режима пропуска со слиянием и режима слияния.
В текущей HEVC-схеме внешнее предсказание может быть однонаправленным или двунаправленным. "Однонаправленное" означает то, что один блок предиктора используется для того, чтобы предсказывать текущий блок. Один блок предиктора задается посредством индекса списка, индекса опорного кадра и вектора движения. Индекс списка соответствует списку опорных кадров. Например, может рассматриваться возможность того, что используются два списка: L0 и L1. Один список содержит, по меньшей мере, один опорный кадр, и опорный кадр может быть включен в оба списка. Вектор движения имеет два компонента: горизонтальный и вертикальный. Вектор движения соответствует пространственному смещению в отношении пикселов между текущим блоком и временным блоком предиктора в опорном кадре. Таким образом, предиктор блока для однонаправленного предсказания является блоком из опорного кадра (опорного индекса) списка, указываемого посредством вектора движения.
Для двунаправленного внешнего предсказания рассматриваются два предиктора блоков: по одному для каждого списка (L0 и L1). Следовательно, рассматриваются 2 индекса опорных кадров, как и 2 вектора движения. Предиктор внешнего блока для двунаправленного предсказания представляет собой среднее (попиксельное) двух блоков, указываемых посредством этих двух векторов движения.
Информация движения, выделяемая предиктору внешнего блока, может быть задана посредством следующих параметров:
- Тип направления: однонаправленное или двунаправленное.
- Один список (однонаправленное) или два списка (двунаправленное): L0, L1, L0 и L1.
- Один (однонаправленное) или два индекса опорных кадров (двунаправленное): RefL0, RefL1, (RefL0, RefL1).
- Один (однонаправленное) или два вектора движения (двунаправленное): каждый вектор движения имеет два компонента (горизонтальный mvx и вертикальный mvy).
Можно отметить, что двунаправленный внешний предиктор может использоваться только для типа серии последовательных макроблоков B-типа. Внешнее предсказание в сериях последовательных B-макроблоков может быть одно- или двунаправленным. В сериях последовательных P-макроблоков внешнее предсказание является только однонаправленным.
Текущая схема HEVC использует 3 различных внешних режима: внешний режим, режим слияния и режим пропуска со слиянием. Основное отличие между этими режимами заключается в передаче служебных данных в потоке битов.
Во внешнем режиме все данные явно передаются в служебных сигналах. Это означает то, что остаток текстуры кодируется и вставляется в поток битов (остаток текстуры является разностью между текущим блоком и блоком внешнего предсказания). Для информации движения кодируются все данные. Таким образом, кодируется тип направления (одно- или двунаправленное). Индекс списка, если требуется, также кодируется и вставляется в поток битов. Связанные индексы опорных кадров явно кодируются и вставляются в поток битов. Значение вектора движения предсказывается посредством выбранного предиктора вектора движения. Остаток вектора движения для каждого компонента затем кодируется и вставляется в поток битов, после чего следует индекс предиктора.
В режиме слияния остаток текстуры и индекс предиктора кодируются и вставляются в поток битов. Остаток вектора движения, тип направления, список или индекс опорного кадра не кодируются. Эти параметры движения извлекаются из индекса предиктора. Таким образом, предиктор является предиктором всех данных информации движения.
В режиме пропуска со слиянием информация, за исключением "режима" и индекса предиктора, не передается на сторону декодера. В этом режиме обработка является аналогичной режиму слияния за исключением того, что остаток текстуры не кодируется или не передается. Пиксельные значения блока пропуска со слиянием являются пиксельными значениями предиктора блока.
В наборе предикторов информации движения, представленном на фиг. 1, два пространственных вектора движения внешнего режима выбираются из числа тех блоков в кадре N, которые находятся выше и слева от блока, который должен быть кодирован, включающих в себя верхние угловые блоки и левый угловой блок.
Левый предиктор выбирается из числа блоков "верхний левый" и "левый". Следующие условия оцениваются в указанном порядке до тех пор, пока не будет найдено значение вектора движения:
1. Вектор движения из идентичного опорного списка и идентичного опорного изображения
2. Вектор движения из другого опорного списка и идентичного опорного изображения
3. Масштабированный вектор движения из идентичного опорного списка и другого опорного изображения
4. Масштабированный вектор движения из другого опорного списка и другого опорного изображения
Если значение не находится, левый предиктор считается недоступным. В этом случае, это указывает, что связанные блоки внутренне кодированы, или эти блоки не существуют. Верхний предиктор выбирается из "верхний правый", "верхний" и "верхний левый" в этом конкретном порядке с идентичными условиями, как описано выше.
Временной предиктор движения поступает из ближайшего опорного кадра в конфигурации с низкой задержкой. В случае B-кадров 2 вектора движения рассматриваются для совместно размещенного блока в кадре N-1. Один располагается в первом списке L0, и один располагается во втором списке L1. Если оба вектора движения существуют, выбирается вектор движения, который имеет кратчайшее временное расстояние. Если оба предиктора векторов движения имеют идентичное временное расстояние, выбирается движение из первого списка L0. Выбранный совместно размещенный вектор движения затем масштабируется, если требуется, согласно своему временному расстоянию и временному расстоянию кодированного вектора движения. Если совместно размещенного предиктора не существует, предиктор считается недоступным.
Для иерархического кодирования B-кадров могут рассматриваться 2 совместно размещенных вектора движения. Оба поступают из будущего опорного кадра. Выбирается вектор движения, который пересекает текущий кадр. Если оба предиктора пересекают текущий кадр, выбирается вектор движения, который имеет кратчайшее временное расстояние. Если оба предиктора имеют идентичное временное расстояние, то выбирается движение из первого списка L0. Выбранный совместно размещенный вектор движения затем масштабируется, если требуется, согласно своему временному расстоянию и временному расстоянию кодированного вектора движения. Если совместно размещенного предиктора не существует, предиктор считается недоступным.
Для случая с низкой задержкой и иерархического случая, когда совместно размещенный блок разделяется на множество сегментов (потенциально, совместно размещенный блок содержит множество векторов движения), выбранный сегмент является верхним левым центральным сегментом. Кроме того, временной предиктор является вектором движения блока в нижней правой позиции совместно размещенного блока (позиции H на фиг. 1). Если этот блок не существует, или если он внутренне кодируется, блок в центральной позиции совместно размещенного блока выбирается в качестве вектора движения, который должен быть извлечен.
Значение предиктора движения затем добавляется в набор предикторов.
В завершение, применяется процесс отбрасывания. Он состоит в удалении дублированных предикторов из набора выбранных предикторов векторов движения. В конце этого процесса набор содержит недублированные предикторы векторов движения. Этот набор может содержать 1, 2, 3 или 4 предиктора. В текущей схеме, список предикторов является фиксированным, так что размер списка ограничен 2. Следовательно, выбранный предиктор кодируется с помощью одного бита. Таким образом, если число предикторов в списке равно 3 или 4, последний предиктор, или, соответственно, 2 последних предиктора удаляются.
Предиктор режимов слияния ("классического" или пропуска) представляет всю информацию движения: направление, список, индекс опорного кадра и векторы движения. Индекс предиктора кодируется с помощью унарного максимального кода, как проиллюстрировано в таблице 1.
Размер списка является фиксировано равным 5 для всех блоков слияния или блоков пропуска со слиянием в текущей HEVC-схеме.
Фиг. 2 является блок-схемой последовательности операций в примере процесса извлечения векторов движения для режимов слияния внутреннего предсказания (пропуск со слиянием и слияние имеют идентичный процесс извлечения предикторов векторов движения). Способ применяется для того, чтобы получать набор потенциальных предикторов информации движения для кодирования части изображения для изображения относительно части опорного изображения. На первом этапе извлечения, рассматриваются 7 позиций блоков (601-607). Эти позиции являются пространственными и временными позициями, проиллюстрированными на фиг. 1 (каждая позиция обозначается одинаково на обоих чертежах). Модуль 608 проверяет доступность этих векторов движения и выбирает самое большее 5 векторов движения. Этот этап 608 реализации модуля определяет то, что предиктор доступен, если он существует, а если блок не подвергается внутреннему кодированию. Выбор и верификация 5 выбранных векторов движения выполняется в соответствии со следующими условиями:
- Если доступен "левый" вектор (601) движения (т.е. если он существует, и если этот блок не подвергается внутреннему кодированию), вектор движения "левого" блока выбирается и используется в качестве предиктора 1 (610).
- Если доступен "верхний" вектор (602) движения, вектор движения "верхнего" блока выбирается и используется в качестве предиктора 2 (611).
- Если доступен "верхний правый" вектор (603) движения, вектор движения "верхнего правого" блока выбирается и используется в качестве предиктора 3 (612).
- Если доступен "нижний левый" вектор (604) движения, вектор движения "нижнего левого" блока выбирается и используется в качестве предиктора 4 (613).
- Если один (или более) из предыдущих предикторов недоступны, и если доступен "верхний левый" вектор (605) движения, вектор движения "верхнего левого" блока добавляется в набор предикторов векторов движения после добавленного пространственного предиктора.
- Если доступен вектор H движения, вектор движения блока H выбирается и используется в качестве предиктора 5 (614). Если блок H недоступен, проверяется доступность "совместно размещенного" вектора движения (т.е. вектора движения блока в позиции в опорном кадре, идентичной позиции текущего блока в текущем кадре), и если он существует, он используется в качестве временного предиктора. Проверка доступности, выполняемая посредством модуля 608, требует 1 цикла.
Временной предиктор должен масштабироваться при необходимости. Фактически, для временного вектора движения, направление и индекс опорного кадра не зависят от блока H или совместно размещенного блока, а зависят от данных текущей серии последовательных макроблоков. Если текущий блок находится в серии последовательных B-макроблоков, временной предиктор всегда является двунаправленным, и всегда является однонаправленным для серий последовательных P-макроблоков. Индексы опорных кадров для каждого списка (L0, L1) опорных кадров извлекаются из левого и верхнего предиктора. Если для списка левый и верхний блоки не имеют индекса опорного кадра, индекс опорного кадра для временного предиктора задается равным нулю.
Поскольку индекс опорного кадра для временного предиктора зависит не от индекса опорного кадра блока H или совместно размещенного блока, а от опорного кадра левого и верхнего предиктора, его значение вектора движения должно масштабироваться. Это означает то, что если временное расстояние, покрываемое посредством временного вектора движения, отличается от разности между текущим кадром и опорным кадром предиктора, временной вектор движения масштабируется, чтобы покрывать корректное временное расстояние.
В конце модулей 608 и 609 набор предикторов содержит самое большее 5 предикторов (610-614). Затем, процесс 615 отбрасывания применяется для того, чтобы удалять дублированные возможные варианты из набора предикторов. Этот процесс состоит в сравнении каждого предиктора набора со всеми остальными предикторами в этом наборе и в удалении тех предикторов, которые равны другому предиктору в наборе (при сохранении другого предиктора, дублированный возможный вариант которого является копией в наборе), так что копии отсутствуют для предикторов в наборе. Процесс отбрасывания для серий последовательных P-макроблоков учитывает значения векторов движения и их индексы опорных кадров. Соответственно, два компонента вектора движения и его опорного индекса сравниваются со всеми остальными, и только если эти три значения равны, предиктор удаляется из набора. Для B-кадра этот критерий расширяется на направление и списки. Таким образом, предиктор считается дублированным предиктором, если он использует идентичное направление, идентичные списки (L0, L1 или L0 и L1), индексы опорных кадров и идентичное значение векторов движения (MV_L0 и MV_L1 для двунаправленного предсказания). Процесс отбрасывания длится 1 цикл, когда должны сравниваться 5 предикторов самое большее. Фактически, можно считать, что 12 сравнений могут быть вычислены в 1 цикле. Число сравнений для процесса отбрасывания в самом сложном случае равно сумме от 0 до N-1. Следовательно, для 5 предикторов требуются 10 сравнений (т.е. 4+3+2+1=10).
В конце этого процесса 615 отбрасывания формируется сокращенный набор 616 предикторов.
Затем, модуль 617 формирования векторов движения формирует новые возможные варианты на основе сокращенного набора предикторов векторов движения. Эта обработка типично может длиться, по меньшей мере, один цикл. Можно отметить, что в текущей HEVC-схеме, используемая схема может формировать максимум 20 предикторов в самом сложном случае. Этот модуль 617 формирует второй набор 618 предикторов.
Второй набор 618 предикторов добавляется в сокращенный набор 616 предикторов, и процесс отбрасывания применяется для того, чтобы удалять дублированные возможные варианты этого второго набора предикторов по сравнению с сокращенным и вторым наборами. Этот процесс отбрасывания является аналогичным процессу отбрасывания модуля 615. Тем не менее, в завершение, если список содержит более 5 предикторов, список предикторов усекается до 5, что представляет собой текущий размер списка, заданный в HEVC-схеме. Можно отметить, что этот процесс может длиться, по меньшей мере, 1 цикл. Тем не менее, длительность цикла зависит от числа предикторов, сформированных во втором наборе 618 предикторов. В текущей реализации HEVC этот процесс длится 3 цикла вследствие числа сформированных предикторов (наиболее сложный случай: 32 сравнения для текущей схемы).
В завершение, процесс 619 отбрасывания формирует окончательный список 620 предикторов, из которого должен извлекаться предиктор для текущего блока.
Недостаток процесса состоит в том, что извлечение предиктора текущего вектора движения для режима слияния может достигать 11 циклов в самом сложном случае, в то время как, по меньшей мере, 5 циклов требуются в наименее сложном случае. Таким образом, извлечение векторов движения оказывает значительное влияние на сложность кодирования и декодирования.
Настоящее изобретение разработано, чтобы разрешать одну или более вышеприведенных проблем.
Независимо, в первом аспекте изобретения, может предоставляться способ извлечения, по меньшей мере, одного предиктора информации движения для кодирования или декодирования части изображения для изображения посредством компенсации движения относительно, по меньшей мере, одной части опорного изображения, при этом для упомянутой части изображения, которая должна быть кодирована или декодирована, способ содержит предоставление, для обработки, по меньшей мере, двух различных первого и второго поднаборов предикторов информации движения первого набора (801-807) предикторов информации движения, причем первый поднабор содержит, по меньшей мере, один временной предиктор информации движения, и второй поднабор содержит, по меньшей мере, один пространственный предиктор информации движения и исключает временные предикторы информации движения; обработку (808, 809) первого поднабора предикторов информации движения; и обработку (808, 815, 817) второго поднабора предикторов информации движения; и получение (819), на основе предикторов (818, 814) информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения, окончательного набора (820) предикторов информации движения, применимых для предсказания упомянутой части изображения из части опорного изображения; при этом обработка второго поднабора содержит удаление копий из числа предикторов информации движения упомянутого второго поднабора только в случае, если второй поднабор содержит один или более предикторов информации движения, которые являются идентичными, чтобы предоставлять сокращенный поднабор (816) предикторов информации движения.
Поскольку временные предикторы исключаются из выбора для второго поднабора, следует понимать, что процесс удаления или отбрасывания копий из числа выбранных предикторов второго поднабора может применяться к пространственным предикторам только и тем самым не заключает в себе обработку временных предикторов информации движения.
Посредством исключения временных предикторов из процесса отбрасывания таким образом, уменьшается общее число сравнений, в силу этого снижается вычислительная сложность.
Наоборот, в конкретных вариантах осуществления пространственные предикторы исключаются из выбора для первого поднабора. Обработка первого набора (то есть временных предикторов движения) может не заключать в себе удаление копий в некоторых вариантах осуществления, хотя, как подробнее поясняется ниже, варианты осуществления преимущественно могут комбинировать обработанные первый и второй поднаборы, с тем чтобы исключать копии на стадии получения окончательного набора. Другими словами, как следствие, обработка первого набора может не заключать в себе удаление копий до получения окончательного набора.
В варианте осуществления, масштабирование временного предиктора информации движения первого поднабора выполняется одновременно с этапами удаления копий и формирования дополнительных предикторов информации движения второго поднабора.
В варианте осуществления, способ включает в себя: удаление копий из числа предикторов информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения, в случае если один или более предикторов информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения, являются идентичными, чтобы предоставлять окончательный набор предикторов информации движения, применимых для кодирования упомянутой части изображения, так что копии отсутствуют в окончательном наборе предикторов информации движения.
В варианте осуществления, обработка второго поднабора предикторов информации движения дополнительно содержит удаление копий из числа предикторов информации движения дополнительного второго поднабора предикторов информации движения, в случае если дополнительный второй поднабор содержит один или более предикторов информации движения, которые являются идентичными, чтобы предоставлять второй сокращенный поднабор предикторов информации движения.
В варианте осуществления, этап удаления копий из числа предикторов информации движения дополнительного второго поднабора выполняется одновременно с масштабированием временного предиктора информации движения первого поднабора.
В варианте осуществления, способ включает в себя добавление, во второй сокращенный поднабор предикторов информации движения, предиктора информации движения, полученного в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения второго сокращенного поднабора предикторов информации движения, чтобы получать окончательный набор предикторов информации движения.
В варианте осуществления, способ включает в себя добавление, в сокращенный поднабор предикторов информации движения, предиктора информации движения, полученного в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения сокращенного поднабора предикторов информации движения; при этом окончательный набор предикторов информации движения содержит недублированные векторы движения из числа предикторов векторов движения из сокращенного поднабора предикторов информации движения и дополнительного второго поднабора предикторов информации движения.
В варианте осуществления, обработка второго поднабора, выполняемая одновременно с обработкой первого поднабора, основана на оценке длительности обработки первого поднабора.
В варианте осуществления, предикторы информации движения, полученные в результате обработки второго поднабора, которые добавляются в предикторы информации движения, полученные в результате обработки первого поднабора, чтобы получать окончательный набор предикторов информации движения, основаны на длительности обработки первого поднабора.
В варианте осуществления, способ включает в себя этап определения, на основе временной разности между изображением части изображения и изображением части опорного изображения, того, должен или нет процесс временного масштабирования применяться к первому поднабору предикторов информации движения; при этом в случае, если определяется то, что процесс временного масштабирования должен применяться, обработка первого поднабора предикторов информации движения содержит этап временного масштабирования предикторов информации движения первого поднабора предикторов информации движения на основе временной разности между изображением части изображения и изображением части опорного изображения; в противном случае, если определяется то, что процесс временного масштабирования не должен применяться, обработка первого поднабора предикторов информации движения содержит этап удаления копий из числа предикторов информации движения первого поднабора предикторов информации движения, так что сокращенный поднабор, содержащий недублированные предикторы информации движения из числа предикторов информации движения первого поднабора предикторов информации движения и второго поднабора предикторов информации движения, предоставляется посредством обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения.
В варианте осуществления, в случае если определяется то, что процесс временного масштабирования должен применяться, окончательный набор предикторов получается посредством удаления копий из числа предикторов информации движения, полученных в результате параллельной обработки первого поднабора предикторов информации движения и второго поднабора предикторов информации движения; в противном случае, если определяется то, что процесс временного масштабирования не должен применяться, окончательный набор предикторов получается посредством формирования дополнительных предикторов информации движения на основе сокращенного поднабора, чтобы предоставлять дополнительный второй поднабор предикторов информации движения, и удаления копий из числа дополнительного второго поднабора предикторов информации движения.
В варианте осуществления, способ включает в себя определение сложности процесса временного масштабирования первого поднабора предикторов информации движения, при этом в случае если определяется то, что процесс временного масштабирования длится в течение большей длительности, чем предварительно определенное пороговое значение длительности, окончательный набор предикторов информации движения получается посредством удаления копий из числа предикторов информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения; в противном случае, если определяется то, что процесс временного масштабирования длится в течение меньшей длительности, чем предварительно определенное пороговое значение длительности, окончательный набор предикторов получается посредством добавления, в сокращенный поднабор предикторов информации движения, полученный из второго поднабора предикторов векторов движения, предиктора информации движения, полученного в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения сокращенного поднабора предикторов информации движения; при этом окончательный набор предикторов информации движения содержит недублированные предикторы информации движения из числа предикторов информации движения сокращенного поднабора предикторов информации движения и дополнительного второго поднабора предикторов информации движения.
В варианте осуществления, обработка второго поднабора первого набора предикторов информации движения содержит удаление копий из числа предикторов информации движения упомянутого второго поднабора, чтобы предоставлять сокращенный поднабор предикторов информации движения; и формирование дополнительного набора предикторов информации движения на основе одного из предикторов информации движения упомянутого второго поднабора и включение упомянутого одного из предикторов информации движения упомянутого второго поднабора, при этом копии отсутствуют в дополнительном наборе предикторов информации движения, при этом способ дополнительно содержит удаление копий из числа сокращенного поднабора предикторов информации движения и дополнительного набора предикторов информации движения, чтобы предоставлять недублированный набор предикторов информации движения.
В варианте осуществления, обработка второго поднабора первого набора предикторов информации движения дополнительно содержит: формирование дополнительных предикторов информации движения на основе сокращенного поднабора предикторов информации движения, чтобы предоставлять дополнительный второй поднабор предикторов информации движения; и удаление копий из числа предикторов информации движения дополнительного второго поднабора предикторов информации движения и недублированного набора предикторов информации движения, чтобы предоставлять второй недублированный набор предикторов информации движения.
В варианте осуществления, способ включает в себя добавление, во второй недублированный набор предикторов информации движения, предиктора информации движения, полученного в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения второго недублированного набора предикторов информации движения, чтобы получать окончательный набор предикторов информации движения.
Согласно второму аспекту изобретения, предусмотрено устройство для извлечения, по меньшей мере, одного предиктора информации движения для кодирования или декодирования части изображения для изображения посредством компенсации движения относительно, по меньшей мере, одной части опорного изображения, причем устройство содержит: средство для получения, по меньшей мере, двух различных первого и второго поднаборов предикторов информации движения первого набора предикторов информации движения; первое средство обработки для обработки первого поднабора предикторов информации движения; и второе средство обработки для обработки второго поднабора предикторов информации движения, при этом второе средство обработки сконфигурировано с возможностью выполнять, по меньшей мере, часть обработки второго поднабора предикторов информации движения одновременно, по меньшей мере, с частью обработки первого поднабора предикторов информации движения, выполняемой посредством первого средства обработки; и средство для получения, на основе предикторов информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения, окончательного набора предикторов информации движения, применимых для предсказания упомянутой части изображения из части опорного изображения.
В варианте осуществления, первый поднабор содержит, по меньшей мере, один временной предиктор информации движения, и второй поднабор содержит, по меньшей мере, один пространственный предиктор информации движения.
В варианте осуществления, первое средство обработки сконфигурировано с возможностью временно масштабировать один или каждый временной предиктор информации движения на основе временной разности между изображением части изображения, которая должна быть кодирована, и изображением части опорного изображения.
В варианте осуществления, второе средство обработки сконфигурировано с возможностью формировать набор недублированных предикторов информации движения, в которых копии отсутствуют для предикторов информации движения упомянутого набора.
В варианте осуществления, второе средство обработки сконфигурировано с возможностью формировать один или более дополнительных предикторов информации движения на основе предикторов информации движения второго поднабора.
В варианте осуществления, второе средство обработки сконфигурировано с возможностью комбинировать один или более предикторов информации движения второго поднабора и/или добавлять смещение в один или более предикторов информации второго поднабора.
В варианте осуществления, второе средство обработки сконфигурировано с возможностью: удалять копии из числа предикторов информации движения упомянутого второго поднабора, в случае если второй поднабор содержит один или более предикторов информации движения, которые являются идентичными, чтобы предоставлять сокращенный поднабор предикторов информации движения; и формировать дополнительные предикторы информации движения на основе сокращенного поднабора предикторов информации движения, чтобы предоставлять дополнительный второй поднабор предикторов информации движения.
В связанном аспекте, независимо может быть предусмотрено устройство для извлечения, по меньшей мере, одного предиктора информации движения для кодирования или декодирования части изображения для изображения посредством компенсации движения относительно, по меньшей мере, одной части опорного изображения, причем устройство содержит: средство для получения, по меньшей мере, двух различных первого и второго поднаборов предикторов информации движения первого набора (801-807) предикторов информации движения, причем первый поднабор содержит, по меньшей мере, один временной предиктор информации движения, и второй поднабор содержит, по меньшей мере, один пространственный предиктор информации движения и исключает временные предикторы информации движения; первое средство (808, 809) обработки для обработки первого поднабора предикторов информации движения; и второе средство (808, 815, 817) обработки для обработки второго поднабора предикторов информации движения; и средство для получения (819), на основе предикторов (818, 814) информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения, окончательного набора (820) предикторов информации движения, применимых для предсказания упомянутой части изображения из части опорного изображения; при этом вторая обработка сконфигурирована с возможностью удалять копии из числа предикторов информации движения упомянутого второго поднабора только в случае, если второй поднабор содержит один или более предикторов информации движения, которые являются идентичными, чтобы предоставлять сокращенный поднабор (816) предикторов информации движения.
В варианте осуществления, первое средство обработки сконфигурировано с возможностью выполнять масштабирование временного предиктора информации движения первого поднабора одновременно с операциями удаления копий и формирования дополнительных предикторов информации движения второго поднабора, выполняемыми посредством второго средства обработки.
В варианте осуществления, устройство включает в себя средство отбрасывания для удаления копий из числа предикторов информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения, в случае если один или более предикторов информации движения, полученных в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения сокращенного поднабора предикторов информации движения; при этом окончательный набор предикторов информации движения содержит недублированные предикторы информации движения из числа предикторов информации движения сокращенного поднабора предикторов информации движения и дополнительного второго поднабора предикторов информации движения.
В варианте осуществления, обработка второго поднабора первого набора предикторов информации движения содержит удаление копий из числа предикторов информации движения упомянутого второго поднабора, чтобы предоставлять сокращенный поднабор предикторов информации движения; и формирование дополнительного набора предикторов информации движения на основе одного из предикторов информации движения упомянутого второго поднабора и включение упомянутого одного из предикторов информации движения упомянутого второго поднабора, при этом копии отсутствуют в дополнительном наборе предикторов информации движения, при этом способ дополнительно содержит удаление копий из числа сокращенного поднабора предикторов информации движения и дополнительного набора предикторов информации движения, чтобы предоставлять недублированный набор предикторов информации движения.
В варианте осуществления, обработка второго поднабора первого набора предикторов информации движения дополнительно содержит: формирование дополнительных предикторов информации движения на основе сокращенного поднабора предикторов информации движения, чтобы предоставлять дополнительный второй поднабор предикторов информации движения; и удаление копий из числа предикторов информации движения дополнительного второго поднабора предикторов информации движения и недублированного набора предикторов информации движения, чтобы предоставлять второй недублированный набор предикторов информации движения.
В варианте осуществления, способ включает в себя добавление, во второй недублированный набор предикторов информации движения, предиктора информации движения, полученного в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения второго недублированного набора предикторов информации движения, чтобы получать окончательный набор предикторов информации движения.
Во втором аспекте изобретения, независимо может быть предусмотрено устройство для извлечения, по меньшей мере, одного предиктора информации движения для кодирования или декодирования части изображения для изображения посредством компенсации движения относительно, по меньшей мере, одной части опорного изображения, причем устройство содержит: средство для получения, по меньшей мере, двух различных первого и второго поднаборов предикторов информации движения первого набора (801-807) предикторов информации движения, причем первый поднабор содержит, по меньшей мере, один временной предиктор информации движения, и второй поднабор содержит, по меньшей мере, один пространственный предиктор информации движения и исключает временные предикторы информации движения; первое средство (808, 809) обработки для обработки первого поднабора предикторов информации движения; и второе средство (808, 815, 817) обработки для обработки второго поднабора предикторов информации движения; и средство для получения (819), на основе предикторов (818, 814) информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения, окончательного набора (820) предикторов информации движения, применимых для предсказания упомянутой части изображения из части опорного изображения; при этом вторая обработка сконфигурирована с возможностью удалять копии из числа предикторов информации движения упомянутого второго поднабора только в случае, если второй поднабор содержит один или более предикторов информации движения, которые являются идентичными, чтобы предоставлять сокращенный поднабор (816) предикторов информации движения.
В варианте осуществления, первое средство обработки сконфигурировано с возможностью выполнять масштабирование временного предиктора информации движения первого поднабора одновременно с операциями удаления копий и формирования дополнительных предикторов информации движения второго поднабора, выполняемыми посредством второго средства обработки.
В варианте осуществления, устройство включает в себя средство отбрасывания для удаления копий из числа предикторов информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения, в случае если один или более предикторов информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения, являются идентичными, чтобы предоставлять окончательный набор предикторов информации движения, применимых для кодирования упомянутой части изображения, так что копии отсутствуют в окончательном наборе предикторов информации движения.
В варианте осуществления, второе средство обработки сконфигурировано с возможностью удалять копии из числа предикторов информации движения дополнительного второго поднабора предикторов информации движения, в случае если дополнительный второй поднабор содержит один или более предикторов информации движения, которые являются идентичными, чтобы предоставлять второй сокращенный поднабор предикторов информации движения.
В варианте осуществления, второе средство обработки сконфигурировано с возможностью удалять копии из числа предикторов информации движения дополнительного второго поднабора одновременно с масштабированием временного предиктора информации движения первого поднабора, выполняемым посредством первого средства обработки.
В варианте осуществления, устройство включает в себя средство, сконфигурированное с возможностью добавлять, во второй сокращенный поднабор предикторов информации движения, предиктор информации движения, полученный в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения второго сокращенного поднабора предикторов информации движения, чтобы получать окончательный набор предикторов информации движения.
В варианте осуществления, устройство включает в себя средство для добавления, в сокращенный поднабор предикторов информации движения, предиктора информации движения, полученного в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения сокращенного поднабора предикторов информации движения; при этом окончательный набор предикторов информации движения содержит недублированные векторы движения из числа предикторов векторов движения из сокращенного поднабора предикторов информации движения и дополнительного второго поднабора предикторов информации движения.
В варианте осуществления, устройство включает в себя средство для оценки длительности обработки первого поднабора, при этом обработка второго поднабора, выполняемая посредством второго средства обработки одновременно с обработкой первого поднабора, выполняемой посредством первого средства обработки, основана на оценке длительности обработки первого поднабора.
В варианте осуществления, устройство включает в себя средство для оценки длительности обработки первого поднабора, при этом предикторы информации движения, полученные в результате обработки второго поднабора, которые добавляются в предикторы информации движения, полученные в результате обработки первого поднабора, чтобы получать окончательный набор предикторов информации движения, основаны на длительности обработки первого поднабора.
В варианте осуществления, устройство включает в себя средство для определения, на основе временной разности между изображением части изображения и изображением части опорного изображения, того, должен или нет процесс временного масштабирования применяться к первому поднабору предикторов информации движения; при этом в случае, если определяется то, что процесс временного масштабирования должен применяться, первое средство обработки сконфигурировано с возможностью выполнять временное масштабирование предикторов информации движения первого поднабора предикторов информации движения на основе временной разности между изображением части изображения и изображением части опорного изображения; в противном случае, если определяется то, что процесс временного масштабирования не должен применяться, первое средство обработки сконфигурировано с возможностью удалять копии из числа предикторов информации движения первого поднабора предикторов информации движения, так что сокращенный поднабор, содержащий недублированные предикторы информации движения из числа предикторов информации движения первого поднабора предикторов информации движения и второго поднабора предикторов информации движения, предоставляется посредством обработки, выполняемой посредством первого средства обработки и второго средства обработки.
В варианте осуществления, устройство включает в себя средство отбрасывания для получения окончательного набора предикторов информации движения, при этом в случае, если определяется то, что процесс временного масштабирования должен применяться, средство отбрасывания сконфигурировано с возможностью получать окончательный набор предикторов посредством удаления копий из числа предикторов информации движения, полученных в результате параллельной обработки первого поднабора предикторов информации движения и второго поднабора предикторов информации движения; в противном случае, если определяется то, что процесс временного масштабирования не должен применяться, первое или второе средство обработки сконфигурировано с возможностью получать дополнительные предикторы информации движения на основе сокращенного поднабора, чтобы предоставлять дополнительный второй поднабор предикторов информации движения, и средство отбрасывания сконфигурировано с возможностью удалять копии из числа дополнительного второго поднабора предикторов информации движения.
В варианте осуществления, устройство включает в себя средство для определения сложности процесса временного масштабирования первого поднабора предикторов информации движения и средство отбрасывания для получения окончательного набора предикторов информации движения, которые являются недублированными; при этом в случае, если определяется то, что процесс временного масштабирования длится в течение большей длительности, чем предварительно определенное пороговое значение длительности, средство отбрасывания сконфигурировано с возможностью удалять копии из числа предикторов информации движения, полученных в результате обработки первого поднабора предикторов информации движения и обработки второго поднабора предикторов информации движения;
- в противном случае, если определяется то, что процесс временного масштабирования длится в течение меньшей длительности, чем предварительно определенное пороговое значение длительности, средство отбрасывания сконфигурировано с возможностью добавлять в сокращенный поднабор предикторов информации движения, полученный из второго поднабора предикторов векторов движения, предиктор информации движения, полученный в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения сокращенного поднабора предикторов информации движения; при этом окончательный набор предикторов информации движения содержит недублированные предикторы информации движения из числа предикторов информации движения сокращенного поднабора предикторов информации движения и дополнительного второго поднабора предикторов информации движения.
В варианте осуществления, второе средство обработки содержит средство для удаления копий из числа предикторов информации движения упомянутого второго поднабора, чтобы предоставлять сокращенный поднабор предикторов информации движения; и средство для формирования дополнительного набора предикторов информации движения на основе одного из предикторов информации движения упомянутого второго поднабора и включения упомянутого одного из предикторов информации движения упомянутого второго поднабора, при этом копии отсутствуют в дополнительном наборе предикторов информации движения, причем устройство дополнительно содержит средство отбрасывания для удаления копий из числа сокращенного поднабора предикторов информации движения и дополнительного набора предикторов информации движения, чтобы предоставлять недублированный набор предикторов информации движения.
В варианте осуществления, второе средство обработки дополнительно содержит средство для формирования дополнительных предикторов информации движения на основе сокращенного поднабора предикторов информации движения, чтобы предоставлять дополнительный второй поднабор предикторов информации движения; и средство для удаления копий из числа предикторов информации движения дополнительного второго поднабора предикторов информации движения и недублированного набора предикторов информации движения, чтобы предоставлять второй недублированный набор предикторов информации движения.
В варианте осуществления, средство отбрасывания сконфигурировано с возможностью добавлять, во второй недублированный набор предикторов информации движения, предиктор информации движения, полученный в результате обработки первого поднабора предикторов информации движения, который не является копией ни одного из предикторов информации движения второго недублированного набора предикторов информации движения, чтобы получать окончательный набор предикторов информации движения.
Третий аспект изобретения предоставляет способ кодирования последовательности цифровых изображений в поток битов, при этом, по меньшей мере, одна часть изображения кодируется посредством компенсации движения относительно части опорного изображения, при этом, по меньшей мере, для одной части изображения для кодирования способ содержит: получение в наборе предикторов информации движения, применимых для предсказания движения части изображения относительно, по меньшей мере, одной части опорного изображения в соответствии со способом по любому из вариантов осуществления первого аспекта изобретения; выбор, по меньшей мере, одного предиктора информации движения из набора предикторов информации для кодирования части изображения; и кодирование части изображения с использованием выбранного, по меньшей мере, одного предиктора информации движения.
Способ может включать в себя кодирование информационного элемента, идентифицирующего выбранный предиктор информации движения.
Четвертый аспект изобретения предоставляет устройство кодирования для кодирования последовательности изображений в поток битов, при этом, по меньшей мере, одна часть изображения кодируется посредством компенсации движения относительно части опорного изображения, причем устройство кодирования содержит: устройство для извлечения, по меньшей мере, одного предиктора информации движения в соответствии с любым из вариантов осуществления второго аспекта изобретения; средство выбора для выбора, по меньшей мере, одного предиктора информации движения из набора предикторов информации для кодирования части изображения; и средство кодирования для кодирования части изображения с использованием выбранного, по меньшей мере, одного предиктора информации движения.
Пятый аспект изобретения предоставляет способ декодирования потока битов, содержащего кодированную последовательность изображений, причем, по меньшей мере, одна часть изображения кодирована посредством компенсации движения относительно части опорного изображения, при этом способ содержит, по меньшей мере, для одной части изображения, которая должна быть декодирована: получение в наборе предикторов информации движения, применимых для предсказания движения части изображения относительно, по меньшей мере, одной части опорного изображения в соответствии со способом по любому из вариантов осуществления первого аспекта изобретения; выбор, по меньшей мере, одного предиктора информации движения из набора предикторов информации для декодирования части изображения; и декодирование части изображения с использованием выбранного, по меньшей мере, одного предиктора информации движения.
Шестой аспект изобретения предоставляет устройство декодирования декодированию потока битов, содержащего кодированную последовательность изображений, причем, по меньшей мере, одна часть изображения кодирована посредством компенсации движения относительно части опорного изображения, причем устройство декодирования содержит:
- устройство для извлечения, по меньшей мере, одного предиктора информации движения в соответствии с устройством по любому из вариантов осуществления второго аспекта изобретения; средство выбора для выбора, по меньшей мере, одного предиктора информации движения из набора предикторов информации для декодирования части изображения; и средство декодирования для декодирования части изображения с использованием выбранного, по меньшей мере, одного предиктора информации движения.
Следует принимать во внимание, что варианты осуществления различных аспектов изобретения могут использоваться для серий последовательных P- и B-макроблоков и для одно- и двунаправленных внешних предсказаний.
По меньшей мере, части способов согласно изобретению могут быть реализованными на компьютере. Соответственно, настоящее изобретение может принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включающего в себя микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или варианта осуществления, комбинирующего программные и аппаратные аспекты, которые могут совместно, в общем, упоминаться в данном документе как "схема", "модуль" или "система". Кроме того, настоящее изобретение может принимать форму компьютерного программного продукта, осуществленного в любом материальном носителе, в представлении, имеющем используемый компьютером программный код, осуществленный на носителе.
Поскольку настоящее изобретение может быть реализовано в программном обеспечении, настоящее изобретение может быть осуществлено в качестве машиночитаемого кода для предоставления в программируемое устройство на любом подходящем носителе. Материальный носитель может содержать носитель хранения данных, такой как гибкий диск, CD-ROM, жесткий диск, устройство на магнитных лентах или полупроводниковое запоминающее устройство и т.п. Временный носитель может включать в себя такой сигнал, как электрический сигнал, электронный сигнал, оптический сигнал, акустический сигнал, магнитный сигнал либо электромагнитный сигнал, например, микроволновый или RF-сигнал.
Далее описываются варианты осуществления изобретения, только в качестве примера и со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 является принципиальной схемой набора предикторов векторов движения, используемых в процессе предсказания векторов движения в контексте вариантов осуществления настоящего изобретения;
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей этапы процесса предшествующего уровня техники для извлечения набора предикторов векторов движения;
Фиг. 3 является блок-схемой, иллюстрирующей компоненты устройства обработки, в котором могут быть реализованы варианты осуществления изобретения;
Фиг. 4 является блок-схемой, иллюстрирующей компоненты устройства кодера согласно вариантам осуществления изобретения;
Фиг. 5 является блок-схемой, иллюстрирующей компоненты устройства декодера согласно вариантам осуществления изобретения;
Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей этапы способа для получения набора предикторов информации движения согласно первому варианту осуществления изобретения;
Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей этапы способа для получения набора предикторов информации движения согласно второму варианту осуществления изобретения;
Фиг. 8 является блок-схемой последовательности операций, иллюстрирующей этапы способа для получения набора предикторов информации движения согласно третьему варианту осуществления изобретения;
Фиг. 9 является блок-схемой последовательности операций, иллюстрирующей этапы способа для получения набора предикторов информации движения согласно четвертому варианту осуществления изобретения;
Фиг. 10(a)-10(c) схематично иллюстрируют схемы для формирования предикторов векторов движения в соответствии с одним или более вариантами осуществления изобретения; и
Фиг. 11 является принципиальной схемой для иллюстрации процесса масштабирования временного предиктора, используемого в вариантах осуществления изобретения.
Фиг. 3 схематично иллюстрирует устройство 200 обработки, сконфигурированное с возможностью реализовывать, по меньшей мере, один вариант осуществления настоящего изобретения. Устройство 200 обработки может быть таким устройством, как микрокомпьютер, рабочая станция или легкое портативное устройство. Устройство 200 содержит шину 213 связи, к которой предпочтительно подсоединяются:
- центральный процессор 211, такой как микропроцессор, обозначаемый CPU;
- постоянное запоминающее устройство 207, обозначаемое ROM, для хранения компьютерных программ для реализации изобретения;
- оперативное запоминающее устройство 212, обозначаемое RAM, для хранения исполняемого кода способа вариантов осуществления изобретения, а также регистров, сконфигурированных с возможностью записывать переменные и параметры, необходимые для реализации способа кодирования последовательности цифровых изображений и/или способа декодирования потока битов согласно вариантам осуществления изобретения; и
- интерфейс 202 связи, присоединенный к сети 203 связи, по которой передаются цифровые данные, которые должны быть обработаны.
Необязательно, устройство 200 также может включать в себя следующие компоненты:
- средство 204 хранения данных, такое как жесткий диск, для хранения компьютерных программ для реализации способов одного или более вариантов осуществления изобретения и данных, используемых или сформированных во время реализации одного или более вариантов осуществления изобретения;
- накопитель 205 на дисках для диска 206, причем накопитель на дисках сконфигурирован с возможностью считывать данные с диска 206 или записывать данные на упомянутый диск;
- экран 209 для отображения данных и/или для службы в качестве графического интерфейса с пользователем, посредством клавиатуры 210 или любого другого средства указания.
Устройство 200 может присоединяться к различным периферийным устройствам, такими как, например, цифровая камера 200 или микрофон 208, присоединенным к плате ввода-вывода (не показана), с тем, чтобы предоставлять мультимедийные данные в устройство 200.
Шина связи обеспечивает связь и функциональную совместимость между различными элементами, включенными в устройство 200 или присоединенными к нему. Представление шины не является ограничивающим, и, в частности, центральный процессор сконфигурирован с возможностью передавать инструкции в любой элемент устройства 200 непосредственно или посредством другого элемента устройства 200.
Диск 206 может быть заменен любым носителем информации, таким как, например, компакт-диск (CD-ROM), перезаписываемый или нет, Zip-диск или карта памяти, и в общем виде, средством хранения информации, которое может считываться посредством микрокомпьютера или посредством микропроцессора, интегрированного или нет в устройство, возможно съемного и сконфигурированного с возможностью хранить одну или более программ, выполнение которых обеспечивает возможность реализации способа кодирования последовательности цифровых изображений и/или способа декодирования потока битов согласно изобретению.
Исполняемый код может быть сохранен либо в постоянном запоминающем устройстве 207 на жестком диске 204, либо на съемном цифровом носителе, таком как, например, диск 206, как описано выше. Согласно варианту, исполняемый код программ может быть принят посредством сети 203 связи через интерфейс 202, чтобы сохраняться на одном из средств хранения устройства 200 перед выполнением, таком как жесткий диск 204.
Центральный процессор 211 сконфигурирован с возможностью управлять и направлять выполнение инструкций или части программного кода программы или программ согласно изобретению, инструкций, которые хранятся на одном из вышеуказанного средств хранения. При включении питания программа или программы, которые хранятся в энергонезависимом запоминающем устройстве, например, на жестком диске 204 или в постоянном запоминающем устройстве 207, передаются в оперативное запоминающее устройство 212, которое в таком случае содержит исполняемый код программы или программ, а также регистры для хранения переменных и параметров, необходимых для реализации изобретения.
В этом варианте осуществления, устройство является программируемым устройством, которое использует программное обеспечение для того, чтобы реализовывать изобретение. Тем не менее, альтернативно настоящее изобретение может быть реализовано в аппаратных средствах (например, в форме специализированной интегральной схемы или ASIC).
Фиг. 4 иллюстрирует блок-схему кодера согласно, по меньшей мере, одному варианту осуществления изобретения. Кодер представляется посредством соединенных модулей, причем каждый модуль сконфигурирован с возможностью реализовывать, например, в форме инструкций программирования, которые должны быть выполнены посредством CPU 211 устройства 200, по меньшей мере, один соответствующий этап способа, реализующего, по меньшей мере, один вариант осуществления кодирования изображения из последовательности изображений согласно одному или более вариантам осуществления изобретения.
Исходная последовательность цифровых изображений i0-in 301 принимается как ввод посредством кодера 30. Каждое цифровое изображение представляется посредством набора выборок, известных как пиксели.
Поток 310 битов выводится посредством кодера 30 после реализации процесса кодирования.
Поток 310 битов содержит множество единиц кодирования или серий последовательных макроблоков, причем каждая серия последовательных макроблоков содержит заголовок серии последовательных макроблоков для передачи значений для кодирования параметров кодирования, используемых для того, чтобы кодировать серию последовательных макроблоков, и тело серии последовательных макроблоков, содержащее кодированные видеоданные.
Входные цифровые изображения i0-i0 301 разделяются на блоки пикселов посредством модуля 302. Блоки соответствуют частям изображения и могут иметь переменные размеры (например, 4×4, 8×8, 16×16, 32×32 пикселов). Режим кодирования выбирается для каждого входного блока. Предоставляются два семейства режимов кодирования: режимы кодирования на основе кодирования с пространственным предсказанием (внутреннее предсказание) и режимы кодирования на основе временного предсказания внешнее предсказание, двунаправленное, режим пропуска. Возможные режимы кодирования тестируются.
Модуль 303 реализует внутреннее предсказание, при котором данный блок, который должен быть кодирован, предсказывается посредством предиктора, вычисленного из пикселов окружения упомянутого блока, который должен быть кодирован. Индикатор относительно выбранного внутреннего предиктора и разность между данным блоком и его предиктором кодируются для того, чтобы предоставлять остаток, если выбирается внутреннее кодирование.
Временное предсказание реализуется посредством модуля 304 оценки движения и модуля 305 компенсации движения. Во-первых, выбирается опорное изображение из числа набора 316 опорных изображений, и часть опорного изображения, также называемая "опорной областью", или часть изображения, которая является ближайшей областью к данному блоку, который должен быть кодирован, выбирается посредством модуля 304 оценки движения. Модуль 305 компенсации движения затем предсказывает блок, который должен быть кодирован, с использованием выбранной области. Разность между выбранной опорной областью и данным блоком, также называемая "остаточным блоком", вычисляется посредством модуля 305 компенсации движения. Выбранная опорная область указывается посредством вектора движения.
Таким образом, в обоих случаях (пространственное и временное предсказание), остаток вычисляется посредством вычитания предсказания из исходного предсказанного блока.
При внутреннем предсказании, реализованном посредством модуля 303, кодируется направление предсказания. При временном предсказании кодируется, по меньшей мере, один вектор движения.
Информация относительно вектора движения и остаточного блока кодируется, если выбирается внешнее предсказание. Чтобы дополнительно снижать скорость передачи битов, вектор движения кодируется посредством разности относительно предиктора вектора движения. Предикторы векторов движения из набора предикторов информации движения получаются из поля 318 векторов движения посредством модуля 317 предсказания и кодирования векторов движения.
Набор предикторов векторов движения, из которых выбирается предиктор вектора движения для кодирования текущего вектора движения, формируется так, как подробнее поясняется далее относительно любого из фиг. 7-10. Для данного текущего блока, который должен быть кодирован, в некоторых вариантах осуществления изобретения определяется число N предикторов векторов движения, и, следовательно, индекс выбранного предиктора вектора движения, который является элементом информации, представляющим выбранный предиктор вектора движения, может быть кодирован с использованием предварительно определенного числа битов согласно числу N предикторов векторов движения. Это предварительно определенное число битов также может быть извлечено посредством декодера даже в случае потерь, и следовательно, можно обеспечивать то, что декодер имеет возможность синтаксически анализировать поток битов даже в случае ошибок или потерь. N предикторов векторов движения выбираются согласно различным вариантам осуществления изобретения таким образом, что они отличаются друг от друга, с тем, чтобы повышать эффективность сжатия.
Кодер 30 дополнительно содержит модуль 306 выбора для выбора режима кодирования. Модуль 306 выбора применяет критерий затрат на кодирование, к примеру, критерий искажения в зависимости от скорости передачи, чтобы определять то, какой режим является наилучшим режимом между режимом пространственного предсказания и режимом временного предсказания. Чтобы дополнительно уменьшать избыточность, преобразование применяется посредством модуля 307 преобразования к остаточному блоку, преобразованные полученные данные затем квантуются посредством модуля 308 квантования и энтропийно кодируются посредством модуля 309 энтропийного кодирования. В завершение, кодированный остаточный блок кодируемого текущего блока вставляется в поток 310 битов, вместе с информацией относительно используемого предиктора, такой как индекс выбранного предиктора вектора движения. Для блоков, кодированных в режиме пропуска, только ссылка на предиктор кодируется в потоке битов без остаточных блоков.
Кодер 30 также выполняет декодирование кодированного изображения для того, чтобы формировать опорное изображение для оценки движения последующих изображений. Это позволяет кодеру и декодеру, принимающим поток битов, иметь идентичные опорные кадры. Модуль 311 обратного квантования выполняет обратное квантование квантованных данных, после чего выполняется обратное преобразование посредством модуля 312 обратного преобразования. Модуль 313 обратного внутреннего предсказания использует информацию предсказания, чтобы определять то, какой предиктор использовать для данного блока, и модуль 314 обратной компенсации движения фактически добавляет остаток, полученный посредством модуля 312, в опорную область, полученную из набора 316 опорных изображений. Необязательно, фильтр 315 удаления блочности применяется для того, чтобы удалять эффекты блочности и повышать визуальное качество декодированного изображения. Идентичный фильтр удаления блочности применяется в декодере, так что если нет потерь при передаче, кодер и декодер применяют идентичную обработку.
Фиг. 5 иллюстрирует блок-схему декодера 40 согласно, по меньшей мере, одному варианту осуществления изобретения. Декодер представляется посредством соединенных модулей, причем каждый модуль сконфигурирован с возможностью реализовывать, например, в форме инструкций программирования, которые должны быть выполнены посредством CPU 211 устройства 200, соответствующий этап способа, реализующий вариант осуществления изобретения.
Декодер 40 принимает поток 401 битов, содержащий единицы кодирования, каждая из которых состоит из заголовка, содержащего информацию относительно параметров кодирования, и тела, содержащего кодированные видеоданные. Как пояснено относительно фиг. 4, кодированные видеоданные энтропийно кодируются, и индексы предикторов векторов движения кодируются, для данного блока, для предварительно определенного числа битов. Принятые кодированные видеоданные энтропийно декодируются посредством модуля 402. Остаточные данные затем деквантуются посредством модуля 403, и затем обратное преобразование применяется посредством модуля 404, чтобы получать пиксельные значения.
Данные режима также энтропийно декодируются, и на основе режима выполняется внутреннее декодирование или внешнее (INTER) декодирование.
В случае внутреннего режима внутренний предиктор определяется посредством модуля 405 обратного внутреннего предсказания на основе режима внутреннего предсказания, указываемого в потоке битов.
Если режим является внешним (INTER), информация предсказания движения извлекается из потока битов, с тем чтобы находить опорную область, используемую посредством кодера. Информация предсказания движения состоит из индекса опорного кадра и остатка вектора движения. Предиктор вектора движения добавляется в остаток вектора движения, чтобы получать вектор движения посредством модуля 410 декодирования на основе векторов движения.
Модуль 410 декодирования на основе векторов движения применяет декодирование на основе векторов движения для каждого текущего блока, кодированного посредством предсказания движения. После того, как получен индекс предиктора вектора движения для текущего блока, фактическое значение вектора движения, ассоциированного с текущим блоком, может быть декодировано и использовано для того, чтобы применять обратную компенсацию движения посредством модуля 406. Опорная область, указываемая посредством декодированного вектора движения, извлекается из опорного изображения 408, чтобы применять обратную компенсацию 406 движения. Данные 411 поля векторов движения обновляются с помощью декодированного вектора движения, с тем, чтобы использоваться для обратного предсказания следующих декодированных векторов движения.
В завершение, получается декодированный блок. Фильтр 407 удаления блочности применяется аналогично фильтру 315 удаления блочности, применяемому в кодере. Декодированный видеосигнал 409 в итоге предоставляется посредством декодера 40.
Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей этапы способа согласно первому варианту осуществления изобретения для извлечения набора потенциальных предикторов информации движения, подходящих для кодирования части изображения для изображения относительно части опорного изображения. На первом этапе способа, рассматриваются 7 позиций блоков (701-707). Эти позиции соответствуют пространственным и временным позициям, проиллюстрированным на фиг. 1. Модуль 708 верифицирует доступность векторов движения 7 позиций блоков и выбирает 4 вектора движения в качестве предикторов векторов движения. В этом модуле вектор движения доступен в качестве предиктора, если он существует, и если блок вектора движения не подвергается внутреннему кодированию. Выбор и верификация 4 предикторов векторов движения описываются при следующих условиях:
- Если доступен "левый" вектор (701) движения (если он существует, и если этот блок не подвергается внутреннему кодированию), вектор движения "левого" блока выбирается и используется в качестве предиктора 1 (610).
- Если доступен "верхний" вектор (702) движения, вектор движения "верхнего" блока выбирается и используется в качестве предиктора 2 (711).
- Если доступен "верхний правый" вектор (703) движения, вектор движения "верхнего правого" блока выбирается и используется в качестве предиктора 3 (712).
- Если доступен "нижний левый" вектор (704) движения, вектор движения "нижнего левого" блока выбирается и используется в качестве предиктора 4 (713).
- Если один (или более) из этих предикторов недоступны, и если доступен "верхний левый" вектор (705) движения, вектор движения "верхнего левого" блока добавляется в набор выбранных предикторов векторов движения после добавленного пространственного предиктора.
- Если доступен вектор H движения, вектор движения блока H выбирается и используется в качестве предиктора 5 (714). Если блок H недоступен, проверяется доступность "совместно размещенного" вектора движения (вектора движения блока в идентичной позиции в текущем блоке), и если совместно размещенный вектор движения доступен, он используется в качестве временного предиктора. Проверка доступности модуля 708 требует 1 цикла.
Поскольку набор предикторов векторов движения, выбранных в начале процесса, содержит только пространственные предикторы 1, 2, 3, 4, сложность процесса 715 выбора уменьшается по сравнению с процессом выбора предшествующего уровня техники на фиг. 2, содержащим 4 пространственных и 1 временного предиктора.
Процесс отбрасывания состоит в сравнении выбранного предиктора со всеми остальными выбранными предикторами и в удалении тех выбранных предикторов, которые равны другому выбранному предиктору (при сохранении другого выбранного предиктора, копией которого является удаляемый предиктор), чтобы предоставлять набор предикторов, в котором ни один из предикторов не является копией любого другого. Процесс отбрасывания для серий последовательных P-макроблоков учитывает значения векторов движения и их индексы опорных кадров. Соответственно, два компонента вектора движения и его индекса опорного кадра сравниваются со всеми соответствующими компонентами других векторов движения, и только если эти три значения равны, предиктор, удаляется (или не добавляется) из набора. Для B-кадра этот критерий может быть расширен на направление и списки. Таким образом, предиктор считается дублированным предиктором, если он использует идентичное направление, идентичные списки (L0, L1 или L0 и L1), идентичные индексы опорных кадров и идентичное значение векторов движения (MV_L0 и MV_L1 для двунаправленного предсказания) в наборе выбранных векторов движения. Процесс отбрасывания длится 1 цикл, когда должны сравниваться 5 предикторов самое большее. Фактически, можно считать, что 12 сравнений могут быть вычислены в 1 цикле. Максимальное число сравнений для процесса отбрасывания в самом сложном случае равно сумме от 0 до N-1. Поскольку максимальное число предикторов в начале процесса отбрасывания составляет 4 вместо 5, максимальное число сравнений, которые должны быть выполнены, составляет 6 (т.е. 3+2+1=6) по сравнению с 10 касательно 5 выбранных предикторов предшествующего уровня техники по фиг. 2. В конце этого процесса 715 отбрасывания формируется сокращенный набор 716 предикторов. Сокращенный набор 716 предикторов векторов движения содержит самое большее 4 предиктора по сравнению с 5 в предшествующем уровне техники.
Модуль 717 формирования предикторов векторов движения формирует новые возможные варианты предикторов на основе предикторов сокращенного набора предикторов векторов движения. Могут использоваться несколько схем для создания таких предикторов, и одна такая схема описывается ниже со ссылкой на фиг. 10(a)-(c). Можно считать, что процесс, выполняемый посредством модуля формирования предикторов векторов движения, длится, по меньшей мере, 1 цикл и формирует второй набор 718 предикторов. Поскольку сокращенный набор 716 предикторов, в общем, содержит меньшее число предикторов, чем сокращенный набор 616 предикторов предшествующего уровня техники, проиллюстрированного на фиг. 2, в среднем меньшее число комбинированных предикторов и масштабированных предикторов формируется в сокращенном наборе 717 предикторов векторов движения по сравнению с числом предшествующего уровня техники, и сложность процесса уменьшается.
Затем, процессор 721 отбрасывания, который работает аналогично процессору 715 отбрасывания, удаляет дублированные возможные варианты из второго набора 718 предикторов и сокращенного набора 716 предикторов посредством сравнения соответствующих компонентов вектора движения и ассоциированных параметров информации движения. В предшествующем уровне техники, проиллюстрированном на фиг. 2, длительность этого конкретного процесса может достигать 3 циклов в зависимости от числа предикторов, сформированных во втором наборе 718 предикторов, в частности, в случае если применяется формирование предикторов векторов движения текущей HEVC-схемы. Процесс 721 отбрасывания формирует второй сокращенный набор 722 предикторов векторов движения.
В завершение, временной предиктор 714 сравнивается со вторым сокращенным набором 722 предикторов векторов движения в модуле 719. В обработке отбрасывания и переупорядочения, выполняемой посредством модуля 719, временной предиктор сравнивается, самое большее, с 5 предикторами, чтобы определять то, является или нет временной предиктор дублированным предиктором. Если он является недублированным предиктором, временной предиктор вставляется в список предикторов непосредственно перед последним недублированным пространственным предиктором. Временная позиция определена посредством процессора 715 отбрасывания и передана в процессор 719 и соответствует числу предикторов в 715. Список предикторов усекается, если он содержит более 5 предикторов, с тем чтобы формировать окончательный набор 720 предикторов. Можно отметить, что максимальное число сравнений, выполняемых посредством модуля 719, составляет 5 в самом сложном случае, что представляет собой уменьшение по сравнению с максимальным числом сравнений модуля 619 отбрасывания предшествующего уровня техники, проиллюстрированного на фиг. 2.
В альтернативном варианте осуществления, процессор 719 отбрасывания может работать аналогично процессору 619 отбрасывания предшествующего уровня техники. В таком случае временной предиктор добавляется в набор предикторов только в том случае, если сокращенный набор 722 предикторов содержит самое большее 4 предиктора. В противном случае он добавляется до конца списка предикторов.
Фиг. 7 иллюстрирует второй вариант осуществления изобретения. Основное отличие относительно варианта осуществления по фиг. 6 заключается в том, что процесс формирования предикторов векторов движения, выполняемый посредством модуля 817, длится в течение определенной длительности в 2 цикла вместо 1 цикла, как в случае модуля 717 по фиг. 6. В случае фиг. 7 процесс отбрасывания для удаления дублированных предикторов второго набора 818 предикторов не выполняется параллельно процессу 809 временного масштабирования. Следовательно, на фиг. 7, в модуле 819 отбрасывания, временной предиктор 814 сравнивается как с предикторами сокращенного набора 816 предикторов векторов движения, так и с предикторами второго набора 818 предикторов. В этом процессе, если временной предиктор 814 является недублированным предиктором предикторов векторов движения сокращенного набора 816 предикторов векторов движения, временной предиктор 814 добавляется в сокращенный набор предикторов векторов движения после пространственных предикторов. Затем, предикторы второго набора 818 предикторов сравниваются с предикторами сокращенного набора 816 предикторов векторов движения, с временным предиктором 814, если добавлен, и с другими предикторами второго набора 818 предикторов.
Преимущество обработки вариантов осуществления по фиг. 6 или фиг. 7 вытекает из полного выполнения процесса 709 масштабирования параллельно с первым процессом 715 или 815 отбрасывания и процессом 717 или 817 формирования предикторов векторов движения. Согласно сложности каждого процесса, дополнительные процессы 721 отбрасывания могут быть включены в способ для того, чтобы предварительно определять недублированный набор, чтобы уменьшать сложность конечного процесса 719 отбрасывания. Таким образом, в первом варианте осуществления изобретения можно считать, что полный процесс отбрасывания разбивается на два процесса отбрасывания, реализованные посредством модулей 721 и 719.
Параллельный процесс масштабирования оказывает положительное влияние на эффективность кодирования. Фактически, поскольку временной предиктор 714 или 814 не используется для того, чтобы формировать второй набор 718 или 818 предикторов, это оказывает влияние на формирование предикторов векторов движения.
Этапы способа формирования набора предикторов векторов движения в соответствии с третьим вариантом осуществления изобретения проиллюстрированы на блок-схеме последовательности операций по фиг. 8. Способ согласно третьему варианту осуществления изобретения дополнительно уменьшает влияние на эффективность кодирования.
Модуль 908 выбора работает аналогично соответствующим модулям 708 и 808 выбора первого и второго вариантов осуществления изобретения, чтобы выбирать 4 вектора 910-913 движения на основе их доступности, из пространственных и временных позиций 901-907 блоков.
Основное отличие заключается в использовании модуля 923 принятия решений по масштабированию. В модуле 923 принятия решений по масштабированию сравниваются временное расстояние временного вектора движения и временное расстояние временного предиктора (номер 5 предиктора). Для однонаправленного типа внешнего предсказания это означает то, что разность номера в последовательности изображений (POC) между временным кадром (кадром блока H и совместно размещенного блока) и опорным кадром, указываемым посредством временного вектора движения (H или совместно размещенного), сравнивается с временным расстоянием между текущим кадром и опорным кадром временного предиктора. Если эти временные расстояния равны, модуль 923 принятия решений по масштабированию возвращает значение "Нет". В противном случае, это означает то, что процесс масштабирования требуется, и модуль 923 принятия решений по масштабированию возвращает значение "Да". Для типа двунаправленного предсказания модуль 923 принятия решений сравнивает временные расстояния для каждого списка, и возвращаемое решение зависит от решений для обоих списков. Таким образом, если для обоих списков не требуется масштабирование, модуль 923 принятия решений по масштабированию возвращает значение "Нет", а если, по меньшей мере, один процесс масштабирования требуется для одного списка, модуль 923 принятия решений по масштабированию возвращает значение "Да".
Если модуль 923 принятия решений по масштабированию возвращает значение "Нет", временной предиктор 5 (924) используется в процессе 915 отбрасывания. Следовательно, формирование 917 предикторов векторов движения использует значение временного предиктора 5 для того, чтобы формировать второй набор 918 предикторов. Затем, процесс 921 отбрасывания применяется к сокращенному набору 916 предикторов и второму набору 918 предикторов. Затем, модуль 925 принятия решений принимает решение по предоставлению окончательного набора предикторов векторов движения на основе решения модуля 923 принятия решений по масштабированию - т.е. решение, принимаемое посредством модуля 923 принятия решений по масштабированию, используется для того, чтобы определять то, является или нет сокращенный набор предикторов, сформированный посредством процесса 921 отбрасывания, окончательным набором предикторов - когда "Нет" возвращается посредством модуля 923 принятия решений, определяется то, что сокращенный набор предикторов, сформированный посредством процесса 921 отбрасывания, является окончательным набором предикторов. Таким образом, когда модуль 923 принятия решений по масштабированию возвращает "Нет", указывающее то, что масштабирование не требуется, извлечение набора предикторов работает аналогично извлечению набора предикторов, как проиллюстрировано на фиг. 2.
В противном случае, если модуль 923 принятия решений по масштабированию возвращает значение "Да", указывающее то, что временной предиктор масштабируется в модуле 909 для того, чтобы формировать номер 5 (914) временного предиктора, определяется то, что сокращенный набор предикторов, сформированный посредством процесса 921 отбрасывания, не является окончательным набором предикторов. В этом случае процессор 915 отбрасывания не использует временной предиктор для процесса отбрасывания, и модуль 917 формирования предикторов векторов движения не использует временной предиктор, чтобы создавать новые предикторы. Следовательно, аналогично процессу, проиллюстрированному на блок-схеме последовательности операций по фиг. 6, процесс 909 масштабирования временного предиктора 5 выполняется параллельно формированию 917 предикторов векторов движения. Модуль 925 принятия решений по масштабированию, после второго процесса отбрасывания, возвращает значение "Да". Таким образом, масштабированный временной предиктор 914 сравнивается с предикторами второго сокращенного набора 922 предикторов в процессе 919 отбрасывания. Как и в случае процессора 719 отбрасывания по фиг. 6, если временной предиктор 914 является недублированным предиктором предикторов во втором сокращенном наборе предикторов, модуль 919 отбрасывания и переупорядочения вставляет временной предиктор в набор предикторов после первого сокращенного набора 916 предикторов, чтобы предоставлять окончательный набор 920 предикторов.
Если обобщить этот вариант осуществления, процесс 909 масштабирования выполняется параллельно процессу 917 формирования второго набора 918, только если временной предиктор должен масштабироваться.
Если предполагается, что формирование 917 предикторов векторов движения длится 1 цикл, и если временному предиктору не требуется процесс масштабирования, 4 цикла требуются для того, чтобы формировать набор предикторов слияния, в противном случае требуются 5 циклов. Следовательно, процесс сокращается на 2 цикла в самом сложном случае аналогично первому варианту осуществления. Основные преимущества этого варианта осуществления по сравнению с предыдущим заключаются в использовании временного предиктора для формирования второго набора предикторов только тогда, когда временному предиктору не требуется масштабирование. Следовательно, эффективность кодирования может быть повышена по сравнению с первым вариантом осуществления.
В дополнительном варианте осуществления, можно учитывать сложность процесса масштабирования. Например, можно знать, требует процесс масштабирования только одного цикла или нет. Только один цикл требуется, если должен быть изменен знак предиктора вектора движения. В этом случае, временной предиктор доступен в идентичное время с сокращенным набором 916 предикторов. Таким образом, временной предиктор может использоваться для процесса 921 отбрасывания. В этом случае, модуль 925 принятия решений по масштабированию возвращает значение "Да", и модули 922 и 919 не требуются для того, чтобы предоставлять окончательный набор предикторов. Следовательно, длительность процесса извлечения сокращается на один цикл, поскольку процесс 919 отбрасывания длится 1 цикл.
Фиг. 9 является блок-схемой последовательности операций, иллюстрирующей способ извлечения набора предикторов векторов движения в соответствии с четвертым вариантом осуществления изобретения. Блок-схема последовательности операций по фиг. 9 основана на блок-схеме последовательности операций по фиг. 6. Как следствие, модули 1001-1020 и 1022 по фиг. 9 являются идентичными, соответственно, модулям 701-720 и 720 по фиг. 6. Отличия заключаются в параллельном использовании недублированных предикторов посредством добавления смещений, как описано при формировании предикторов векторов движения относительно фиг. 10(a)-(c). Когда задается первый предиктор 1 1010, модуль 1023 формирует недублированные предикторы списка. Как пояснено относительно фиг. 10(c), этот процесс состоит в добавлении смещений в один или оба компонента вектора движения первого предиктора 1010. Набор 1024 недублированных предикторов содержит 4 предиктора, которые отличаются друг от друга и отличаются от первого предиктора 1010, доступного после проверки доступности, реализованной посредством процессора 1008 выбора. Как следствие, в этом варианте осуществления, набор 1024 недублированных предикторов, при добавлении в первый предиктор 1010, содержит 5 недублированных предикторов, что фиксировано задано для режима слияния. Формирование недублированных предикторов выполняется параллельно процессу 1015 отбрасывания. Процессор 1025 отбрасывания сравнивает набор 1024 недублированных предикторов с сокращенным набором 1016 предикторов, чтобы получать только 5 предикторов. Набор 1026 недублированных предикторов содержит сокращенный набор 1016 предикторов, после которого идет набор недублированных предикторов, сформированный в 1024. Можно отметить, что процесс 1025 отбрасывания, в общем, требует максимум 6 сравнений. Самый сложный случай возникает, когда сокращенный набор 1016 предикторов векторов движения содержит 4 предиктора. Набор 1024 недублированных предикторов содержит 4 предиктора. Теоретически, процесс отбрасывания требует 16 сравнений в самом сложном случае (4 предиктора сокращенного набора 1016 предикторов векторов движения на 4 предиктора набора 1024 недублированных предикторов). Тем не менее, предикторы векторов движения в наборе 1024 недублированных предикторов отличаются от первого предиктора, так что только второй, третий и четвертые предикторы сокращенного набора 1016 предикторов векторов движения должны сравниваться с набором 1024 недублированных предикторов векторов движения. Как следствие, требуется 12 (4 на 3) сравнений. Предикторы отличаются друг от друга в наборе 1024 недублированных предикторов, так что в самом сложном случае, если 3 первых предиктора недублированных предикторов 1024 равны 3 последним предикторам сокращенного набора 1016 предикторов векторов движения, можно предположить, что последний предиктор в 1024 отличается от предиктора сокращенного набора 1016 предикторов векторов движения. Таким образом, требуются только 9 (3 на 3) сравнений.
Затем, второй набор 1018 предикторов векторов движения формируется посредством модуля 1017 формирования предикторов векторов движения. Процесс 1021 отбрасывания и переупорядочения проверяет то, являются или нет предикторы векторов движения второго набора 1018 предикторов недублированными по сравнению с недублированным набором 1026, который уже содержит 5 предикторов. Если предиктор второго набора 1018 предикторов отличается от всех остальных, он вставляется в позиции числа предикторов в сокращенном наборе 1016 предикторов (после предикторов сокращенного набора 1016 предикторов векторов движения в списке). Следующие этапы 1022, 1019 и 1020 работают идентично обработке модулей 722, 719 и 720 по фиг. 6.
Можно отметить, что формирование 1023 недублированных предикторов может добавляться в конце процесса извлечения после процесса 1019 отбрасывания. Это требует дополнительного процесса отбрасывания, которому необходим еще один цикл, и не приводит к идентичному упорядочению набора предикторов.
Четвертый вариант осуществления имеет несколько преимуществ. Во-первых, в этом варианте осуществления, каждая позиция предиктора имеет значение. Следовательно, способ предоставляет более надежный процесс, чем текущая схема HEVC. Фактически, кодер может использовать индекс предиктора без значения в декодере, которое может приводить к отказу в декодере. Это может происходить, например, когда возникают ошибки сети.
Этот вариант осуществления компенсирует потери эффективности кодирования при параллельном масштабировании. Кроме того, эта модификация также компенсирует потери эффективности кодирования уменьшения числа возможных вариантов, сформированных при формировании предикторов векторов движения модуля 1017. За счет этих недублированных предикторов, только 2 предиктора должны быть сформированы в 1021. Следовательно, процессу 1021 отбрасывания требуются только 10 сравнений в самом сложном случае. Таким образом, требуется только один цикл вместо 3 для самого сложного случая текущей HEVC-схемы, представленной на фиг. 2. За счет этого упрощения только 5 циклов в самом сложном случае требуются для того, чтобы извлекать набор предикторов слияния, вместо 11 для текущей HEVC-схемы.
Следует принимать во внимание, что четвертый вариант осуществления по фиг. 9 может быть легко комбинирован с третьим вариантом осуществления, представленным на фиг. 8.
Далее описываются примеры процессов для формирования дополнительных векторов движения в качестве предикторов, реализованных посредством модулей 717, 817, 917 и 1017 формирования предикторов векторов движения по фиг. 6, 7, 8 и 9, соответственно, со ссылкой на фиг. 10(a)-(c). Текущая HEVC-схема использует 3 схемы, чтобы добавлять новые предикторы на основе формирования текущего набора. Первая схема используется для серий последовательных B-макроблоков. Формирование предикторов векторов движения заключает в себе комбинирование предикторов сокращенного набора 716, 816, 916, 1016 предикторов по фиг. 6, 7, 8 и 9, соответственно. Комбинированный предиктор формируется посредством выбора вектора движения списка L0 первого предиктора и посредством выбора вектора движения списка L1 из другого предиктора. Например, первый возможный комбинированный предиктор имеет вектор движения (и опорный индекс) из L0 первого предиктора из 716 и вектор движения (и опорный индекс) из L1 второго предиктора из 716. В текущей HEVC-схеме могут быть сформированы 12 возможных комбинированных предикторов. Фиг. 10(a) показывает пример этого процесса.
Вторая схема может использоваться только для серий последовательных B-макроблоков. Масштабированный предиктор содержит замену однонаправленных предикторов на двунаправленные предикторы. Если предиктор из 716 является однонаправленным, вектор движения создается в противоположном списке на основе начального вектора движения. Например, если первый предиктор из 716 является однонаправленным, и если он указывает на L0 с опорным индексом 0, значение его вектора движения масштабируется, чтобы указывать на опорный индекс 0 из L1. Компонуемый предиктор содержит опорный индекс 0 и значение вектора движения для L0, а также опорный индекс 0 и масштабированный вектор для списка L1. Этот новый двунаправленный предиктор добавляется во второй набор (718) предикторов. Этот вид формирования предиктора является очень сложным, поскольку он должен масштабировать векторы движения, так что это увеличивает число циклов для модуля 717 (3 цикла). Таким образом, процесс масштабирования может быть ограничен, чтобы менять знак на противоположный компонента значения вектора движения, который может быть выполнен в одном цикле, вместо 3 для классического процесса масштабирования. Фиг. 10(b) показывает пример этого формирования.
Другой способ формирования новых предикторов векторов движения состоит в замене двунаправленных предикторов на однонаправленные предикторы. В этом случае, когда предиктор является двунаправленным, могут формироваться 2 новых предиктора (по одному для каждого списка). Это представляет собой процесс с низкой сложностью по сравнению с процессом обработки масштабированных векторов движения по фиг. 10(a).
В текущей схеме HEVC в конце списка добавляется значение "нулевого вектора движения". Для слияния нулевое значение задается для обоих векторов движения из L0 и L1. Кроме того, при возможности индекс опорного кадра каждого списка увеличивается, чтобы создавать другие нулевые предикторы. Таким образом, изменяется только опорный индекс. Если N опорных индексов используются в обоих списках, N нулевых векторов могут добавляться в набор предикторов. Фиг. 10(c) иллюстрирует пример такого процесса формирования предикторов векторов движения.
Кроме того, можно использовать недублированные предикторы посредством добавления одного или более смещений в компоненты или в несколько компонентов одного доступного предиктора начального набора предикторов. Например, если только один предиктор находится в начальном наборе предикторов, можно формировать 4 предиктора, которые отличаются друг от друга. Например, если предполагается, что предиктор в списке является однонаправленным, первый предиктор формируется посредством добавления значения смещения для одного компонента первого вектора движения. Второй предиктор формируется посредством добавления обратного смещения в первый компонент. Третий получается посредством добавления смещения во второй компонент, и четвертый - посредством добавления обратного смещения во второй компонент. Можно отметить, что этот процесс может применяться к первому возможному варианту, так что предиктор может извлекаться перед процессом 715 отбрасывания.
Фиг. 11 показывает пример масштабирования для временного предиктора, применяемого в модулях 709, 809, 909 и 1009 масштабирования по фиг. 6, 7, 8 и 9, соответственно. На этом чертеже, совместно размещенный вектор MVcol движения в опорном кадре Ref0 указывает на Ref2 с POC (номером в последовательности изображений), равным N-3. Опорный кадр временного предиктора MVt определен и равен Ref0 (POC-номер, равный N-1). Временное расстояние iDiffPocD совместно размещенного вектора движения равно POC Ref2 минус POC Ref0. Таким образом, его временное расстояние равно:
iDiffPocD=(N-3)-(N-1)=2
Аналогичным образом, временное расстояние iDiffPocB, которое должно покрываться посредством временного предиктора, равно POC текущего кадра N минус POC Ref0:
iDiffPocB=(N)-(N-1)=1
Теоретически, масштабированный вектор движения для временного предиктора равен:
MVt=(iDiffPocB*MVcol)/iDiffPocD
Таким образом, в примере, каждый компонент (горизонтальный и вертикальный) делится на 2. Тем не менее, в текущей HEVC-схеме, масштабирование вектора движения задается посредством следующего процесса.
Масштабированный фактор определяется посредством следующей формулы:
iScale=(iDiffPocB×iX+32)>>6;
где iX:
iX=(0×4000+abs(iDiffPocD/2))/iDiffPocD;
MVt затем задается следующим образом:
MVt=(iScale×MVcol+127+(iScale×MVcol<0))>>8
В этих формулах:
">>" представляет оператор сдвига
"abs" представляет функцию, которая возвращает абсолютное значение
"0×4000" представляет значение 16384
Таким образом, варианты осуществления изобретения предоставляют процесс параллельного извлечения с целью уменьшения числа циклов, требуемых для того, чтобы извлекать набор предикторов векторов движения с незначительным влиянием на эффективность кодирования.
Хотя настоящее изобретение описано выше в отношении конкретных вариантов осуществления, настоящее изобретение не ограничено конкретными вариантами осуществления, и для специалистов в данной области техники должны быть очевидными модификации, которые находятся в пределах объема настоящего изобретения. Множество дополнительных модификаций и изменений предполагаются специалистами в данной области техники после прочтения вышеприведенных иллюстративных вариантов осуществления, которые приводятся только в качестве примера и которые не направлены на то, чтобы ограничивать объем изобретения, который определяется исключительно посредством прилагаемой формулы изобретения. В частности, при необходимости различные признаки из различных вариантов осуществления могут меняться местами.
В формуле изобретения, слово "содержащий" не исключает другие элементы или этапы, и упоминание единственного элемента не исключает множества элементов. Простой факт того, что различные признаки упомянуты во взаимно различных зависимых пунктах формулы изобретения, не означает того, что комбинация этих признаков не может быть с выгодой использована.
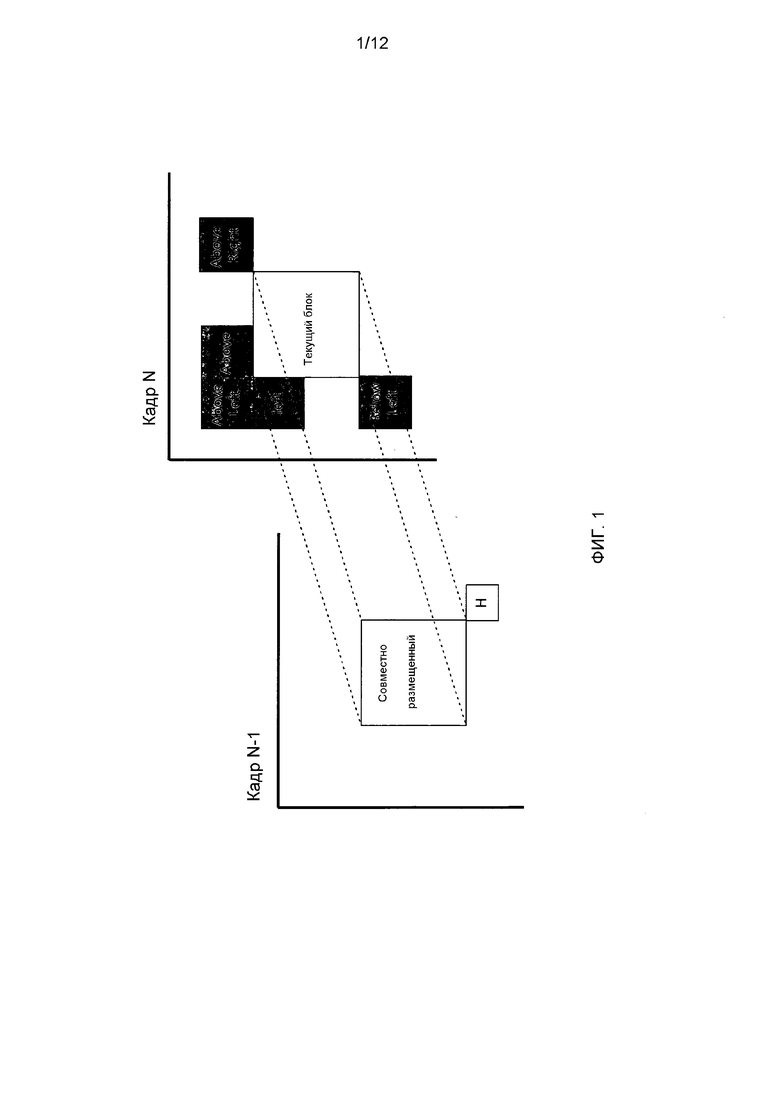
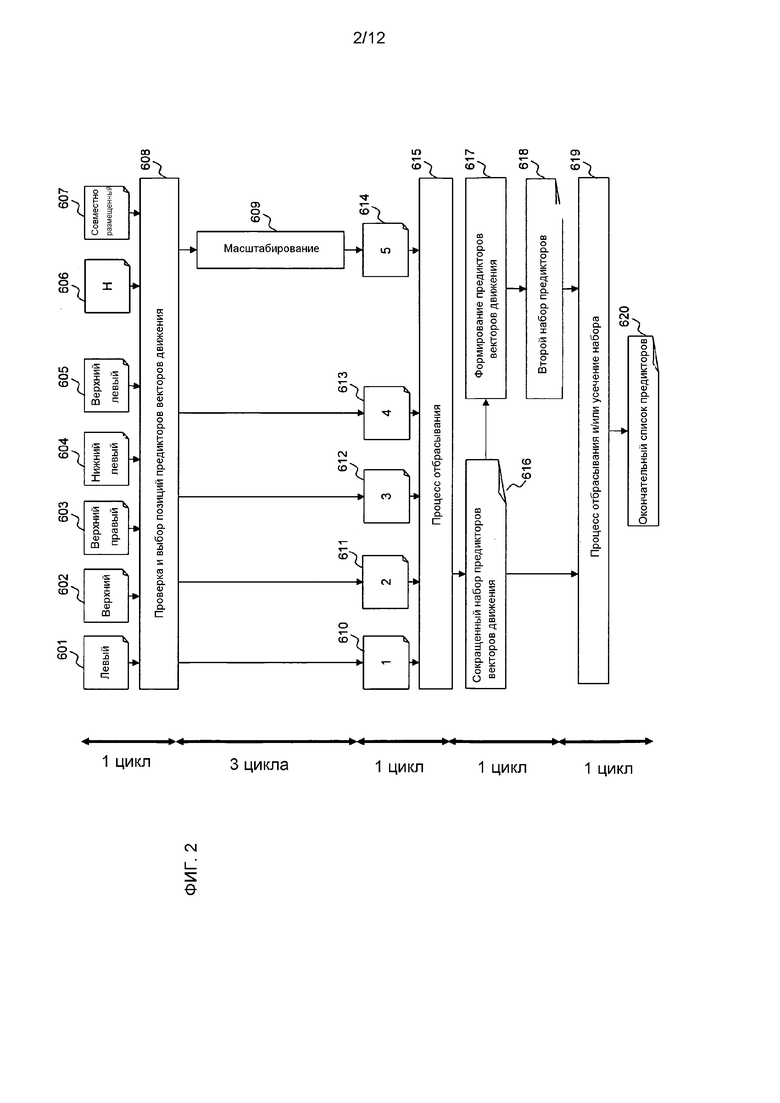
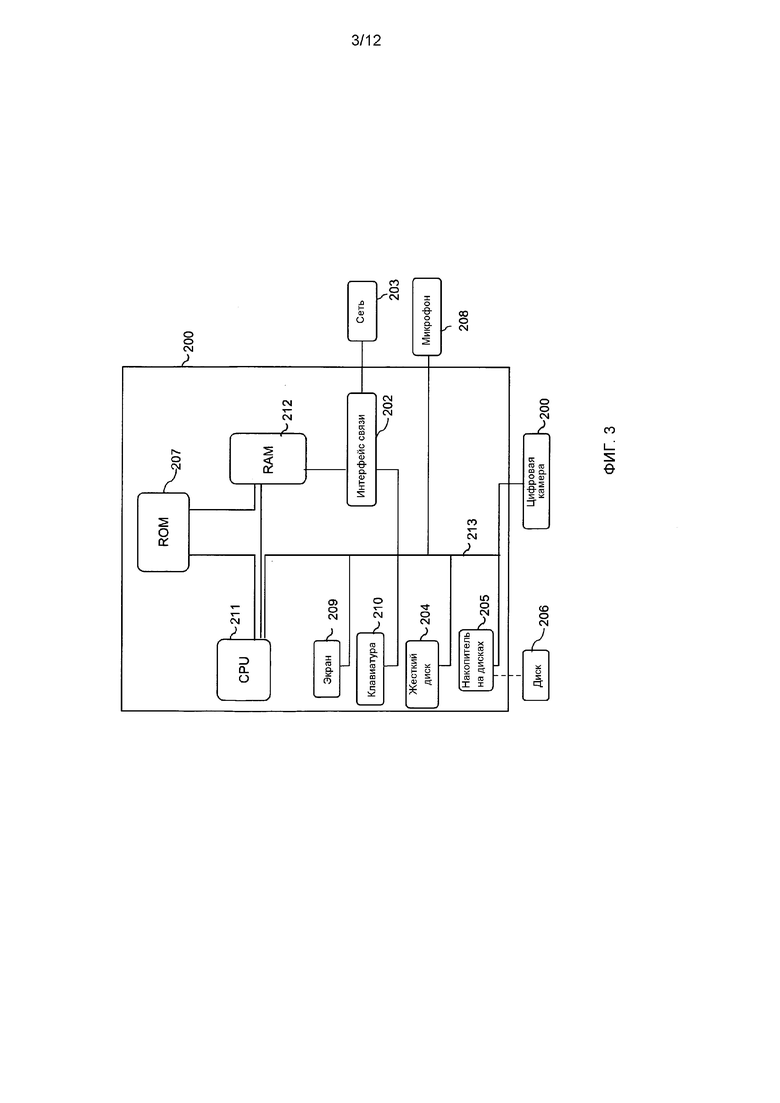
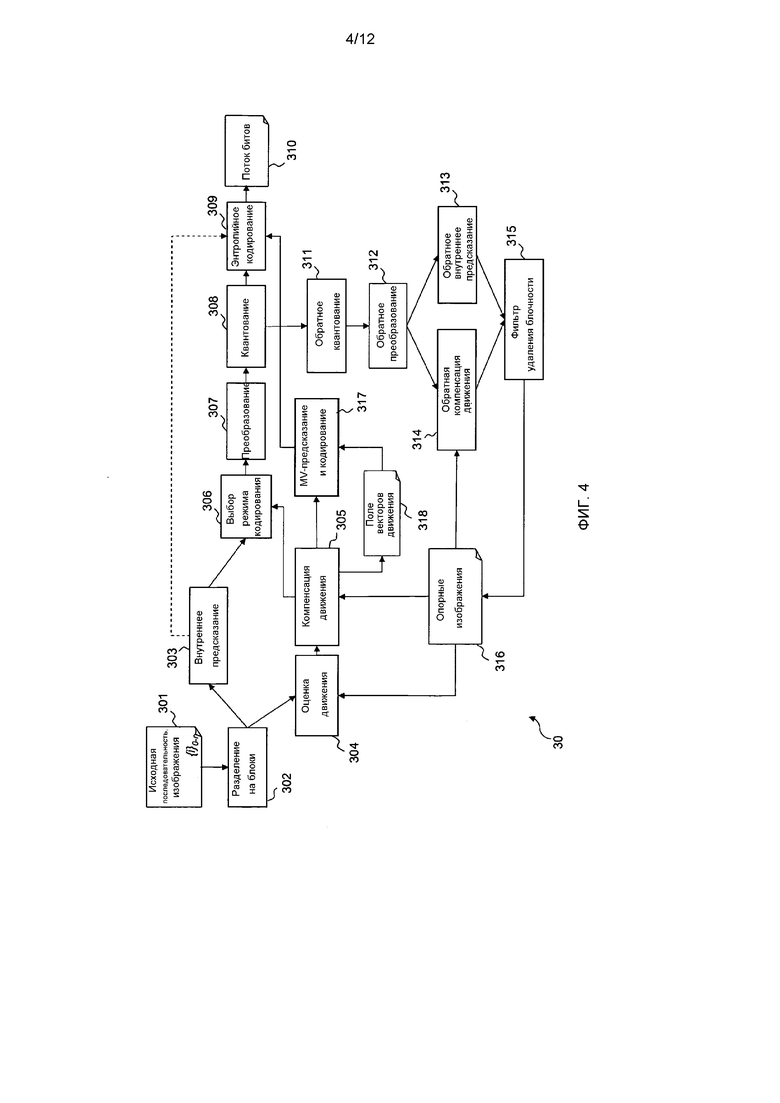
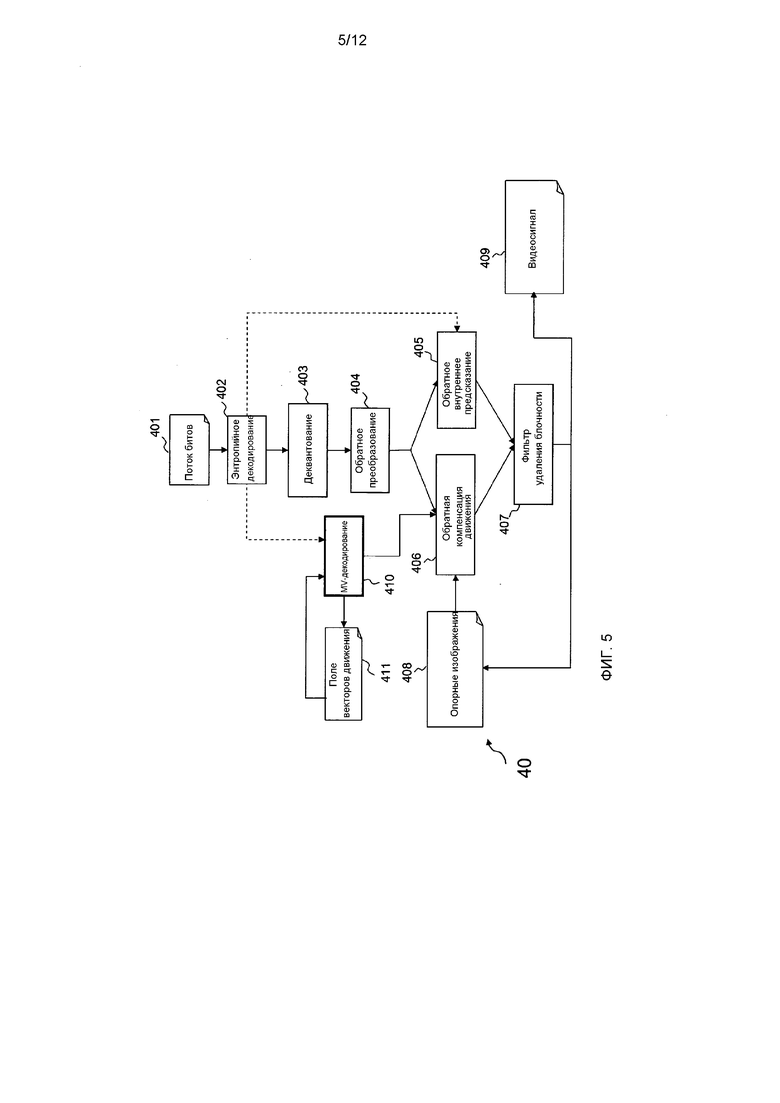
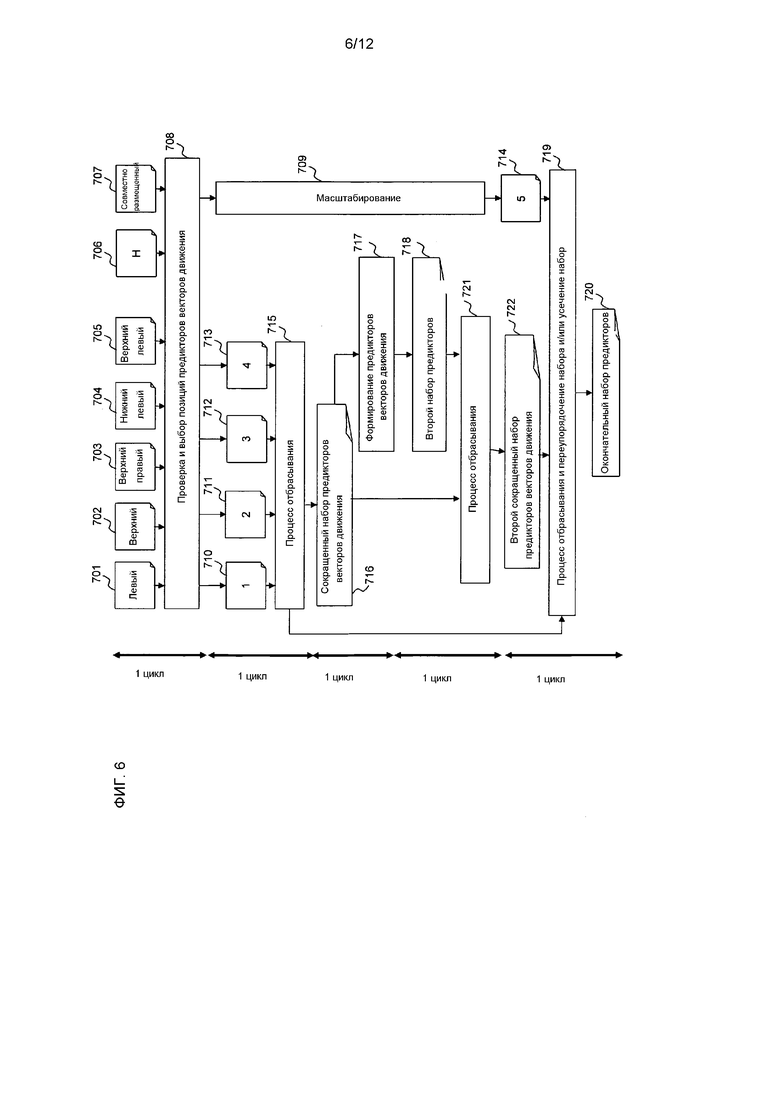
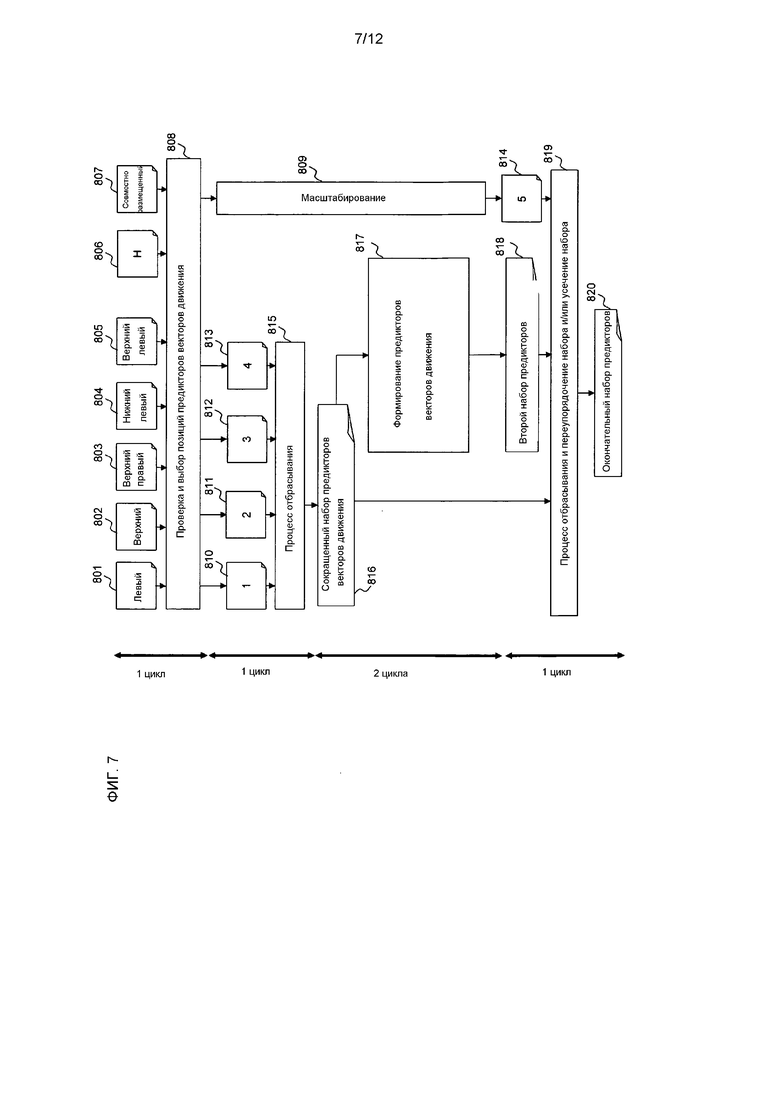
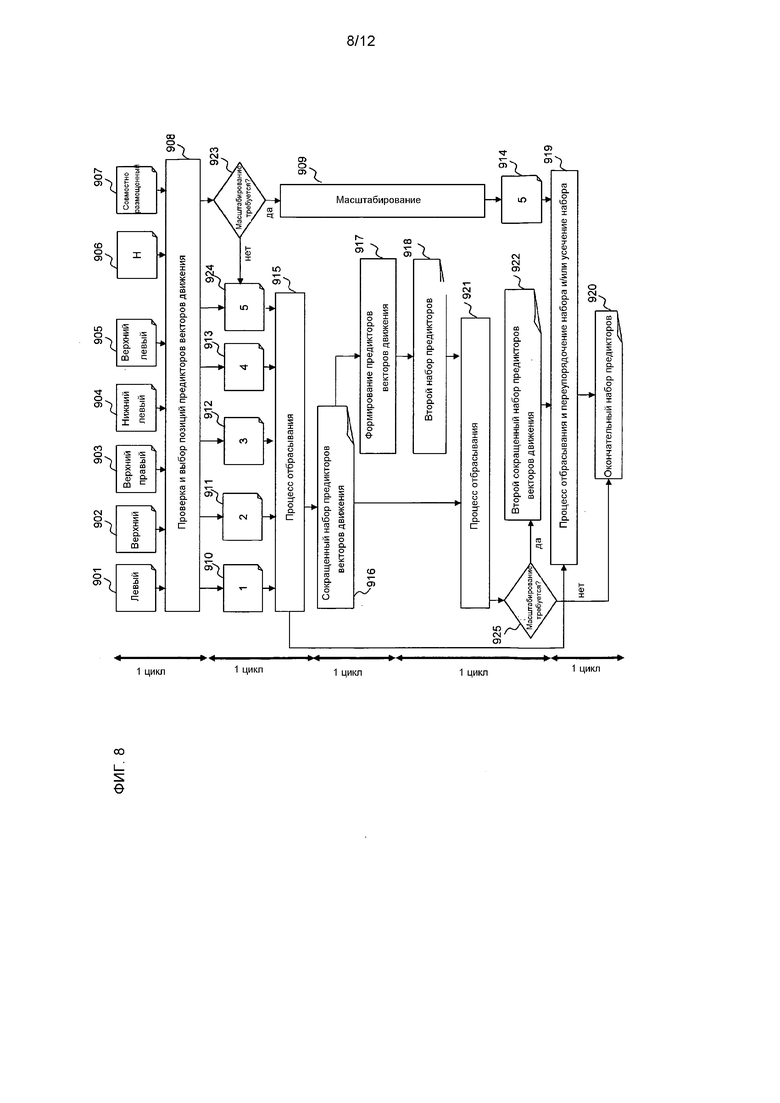
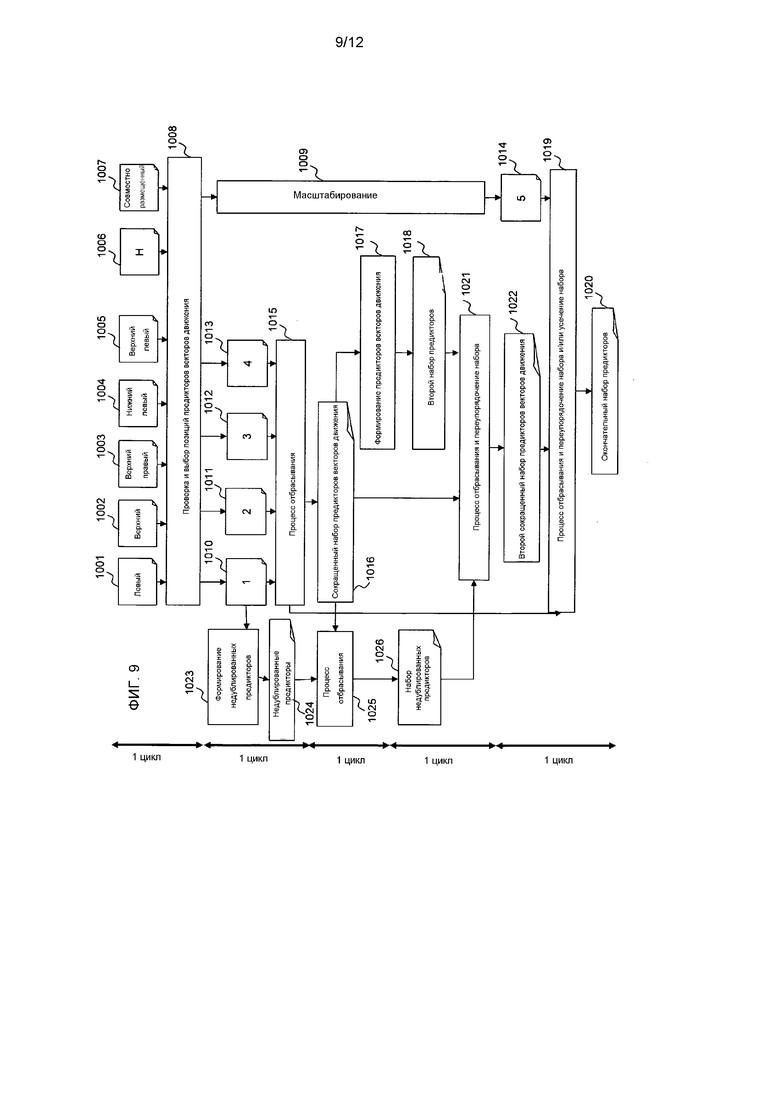
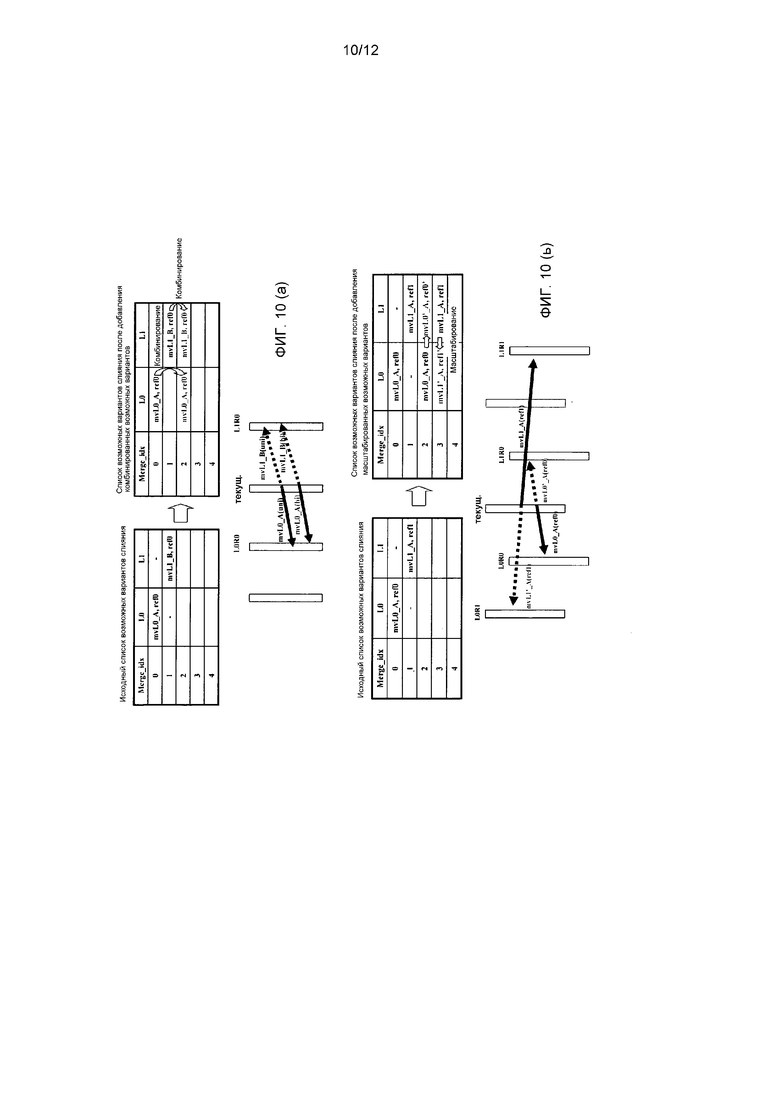
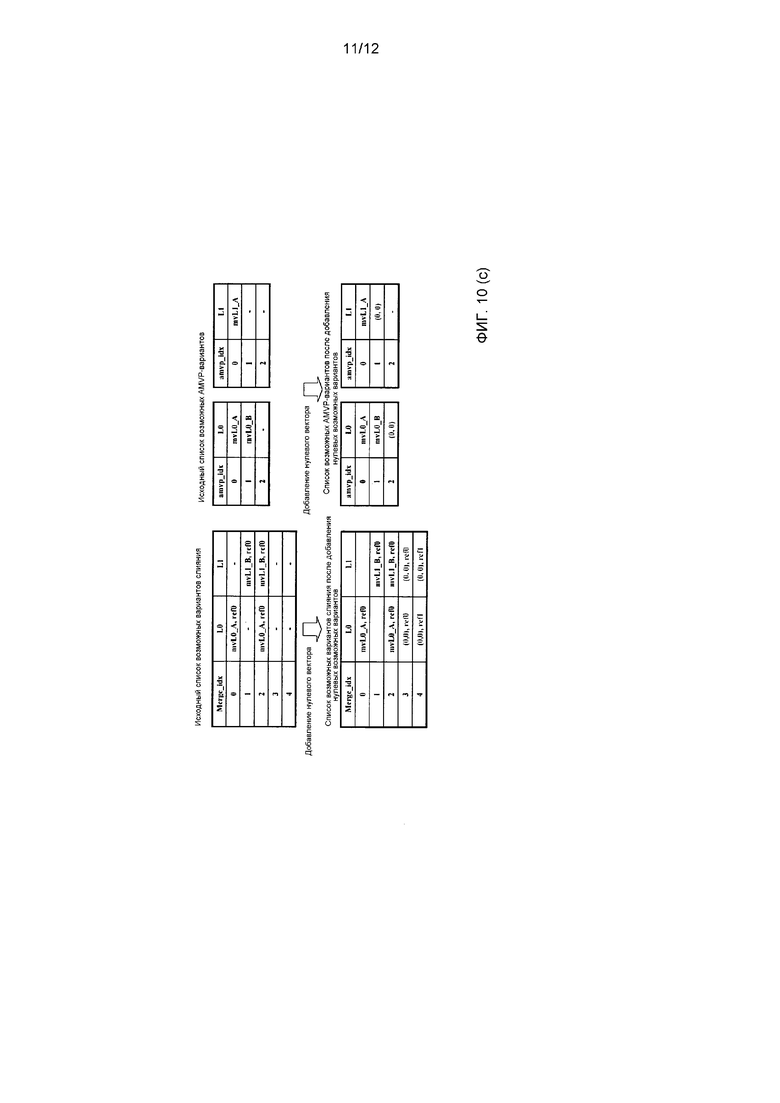
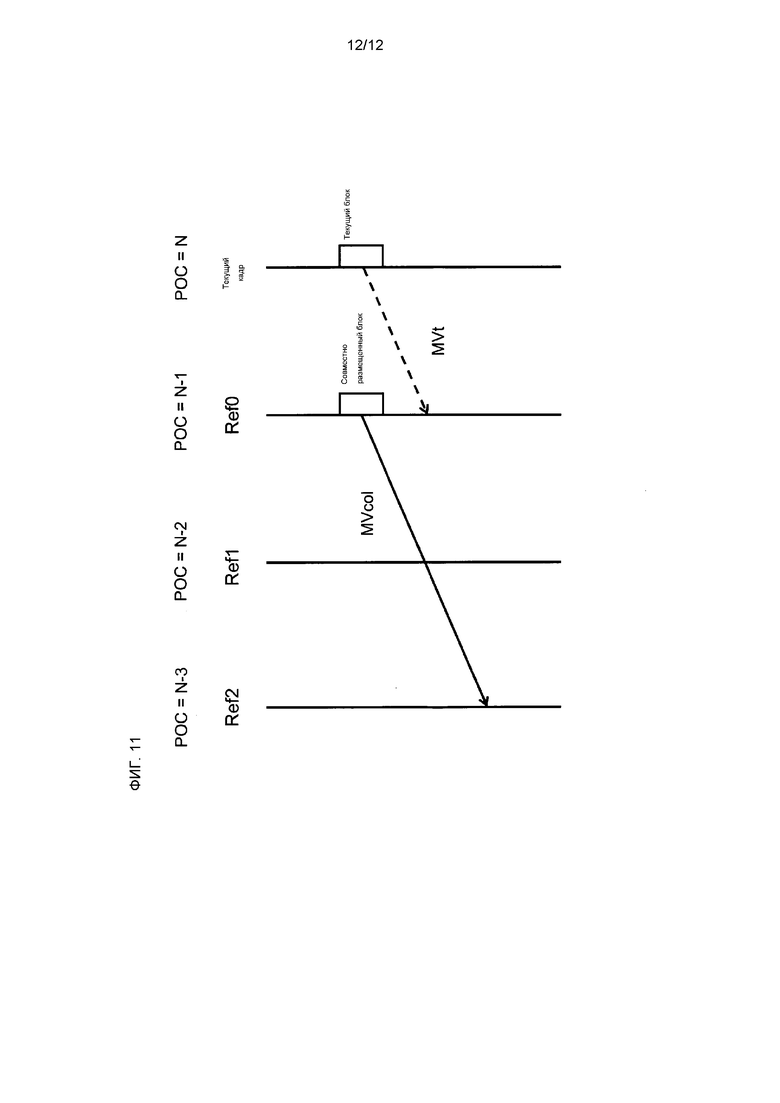
Изобретение относится к вычислительной технике. Технический результат заключается в уменьшении вычислительной сложности кодирования и декодирования. Устройство кодирования для кодирования блока изображения, используя внешнее предсказание, содержит блок извлечения возможного варианта предиктора вектора движения (ПВД), выполненный с возможностью извлекать возможные варианты ПВД для кодирования блока изображения, используя внешнее предсказание, причем возможные варианты ПВД включают в себя первый возможный вариант ПВД, извлеченный из кадра, отличного от кадра, в который включен блок, который должен быть кодирован, и один или более вторых возможных вариантов ПВД, извлеченных из кадра, в который включен блок, который должен быть кодирован; и блок удаления, выполненный с возможностью, в случае когда множество вторых возможных вариантов ПВД извлечены блоком извлечения возможного варианта ПВД, и идентичные возможные варианты ПВД включены среди множества вторых возможных вариантов ПВД, удалять по меньшей мере один идентичный возможный вариант ПВД из возможных вариантов ПВД для кодирования блока, который должен быть кодирован, используя внешнее предсказание. 6 н. и 14 з.п. ф-лы, 13 ил., 1 табл.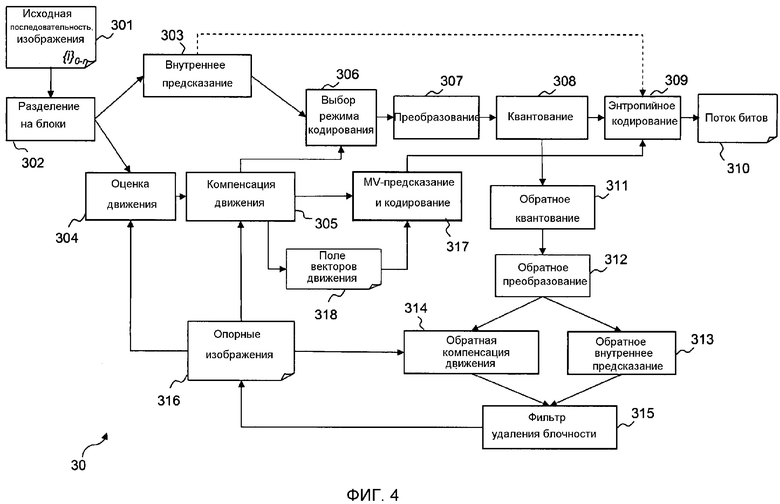
1. Устройство кодирования для кодирования блока изображения, используя внешнее предсказание, содержащее:
блок извлечения возможного варианта предиктора вектора движения, выполненный с возможностью извлекать возможные варианты предиктора вектора движения для кодирования блока изображения, используя внешнее предсказание, упомянутые возможные варианты предиктора вектора движения включают в себя первый возможный вариант предиктора вектора движения, извлеченный из кадра, отличного от кадра, в который включен блок, который должен быть кодирован, и один или более вторых возможных вариантов предиктора вектора движения, извлеченных из кадра, в который включен блок, который должен быть кодирован; и
блок удаления, выполненный с возможностью, в случае когда множество вторых возможных вариантов предиктора вектора движения извлечены блоком извлечения возможного варианта предиктора вектора движения, и идентичные возможные варианты предиктора вектора движения включены среди множества вторых возможных вариантов предиктора вектора движения, удалять по меньшей мере один идентичный возможный вариант предиктора вектора движения из возможных вариантов предиктора вектора движения для кодирования блока, который должен быть кодирован, используя внешнее предсказание.
2. Устройство по п. 1, дополнительно содержащее блок масштабирования, выполненный с возможностью масштабировать первый возможный вариант предиктора вектора движения, используя временную информацию.
3. Устройство по п. 2, в котором блок масштабирования выполнен с возможностью масштабировать первый возможный вариант предиктора вектора движения, используя временную информацию, основанную на временной разнице между кадром, в который включен блок, который должен быть кодирован, и кадром, отличным от кадра, в который включен блок, который должен быть кодирован.
4. Устройство по п. 2, в котором блок масштабирования выполнен с возможностью масштабировать первый возможный вариант предиктора вектора движения, используя временную информацию на основе временной разницы между опорным кадром, представленным первым возможным вариантом предиктора вектора движения, и кадром, отличным от кадра, в который включен блок, который должен быть кодирован.
5. Устройство по п. 1, дополнительно содержащее блок добавления, выполненный с возможностью добавления нулевого вектора движения к возможным вариантам предиктора вектора движения для кодирования блока, который должен быть кодирован, используя внешнее предсказание.
6. Устройство по п. 1, дополнительно содержащее блок добавления, выполненный с возможностью формирования нового возможного варианта предиктора вектора движения посредством объединения второго возможного варианта предиктора вектора движения и добавления сформированного нового возможного варианта предиктора вектора движения к возможным вариантам предиктора вектора движения для кодирования блока, который должен быть кодирован, используя внешнее предсказание.
7. Устройство по п. 1, дополнительно содержащее блок добавления, выполненный с возможностью формирования нового возможного варианта предиктора вектора движения посредством добавления смещения ко второму возможному варианту предиктора вектора движения и добавления сформированного нового возможного варианта предиктора вектора движения к возможным вариантам предиктора вектора движения для кодирования блока, который должен быть кодирован, используя внешнее предсказание.
8. Устройство по п. 1, в котором блок удаления выполнен с возможностью, после завершения удаления идентичных возможных вариантов предиктора вектора движения из множества вторых возможных вариантов предиктора вектора движения, удаления по меньшей мере одного идентичного возможного варианта предиктора вектора движения из возможных вариантов предиктора вектора движения, состоящих из первого возможного варианта предиктора вектора движения и одного или более оставшихся вторых возможных вариантов предиктора вектора движения для кодирования блока, который должен быть кодирован, используя внешнее предсказание.
9. Устройство декодирования для извлечения для декодирования блока кодированного изображения, используя внешнее предсказание, причем устройство содержит:
блок извлечения возможного варианта предиктора вектора движения, выполненный с возможностью извлекать возможные варианты предиктора вектора движения для декодирования блока изображения, причем упомянутые возможные варианты предиктора вектора движения включают в себя первый возможный вариант предиктора вектора движения, который необходимо извлечь из кадра, отличного от кадра, в который включен блок, который должен быть декодирован, и один или более вторых возможных вариантов предиктора вектора движения, которые необходимо извлечь из кадра, в который включен блок, который должен быть декодирован; и
блок удаления, выполненный с возможностью, в случае когда множество вторых возможных вариантов предиктора вектора движения извлечены блоком извлечения возможного варианта предиктора вектора движения, и идентичные возможные варианты предиктора вектора движения включены среди множества вторых возможных вариантов предиктора вектора движения, удалять по меньшей мере один идентичный возможный вариант предиктора вектора движения из возможных вариантов предиктора вектора движения для кодирования блока, который должен быть декодирован.
10. Устройство по п. 9, дополнительно содержащее блок масштабирования, выполненный с возможностью масштабировать первый возможный вариант предиктора вектора движения, используя временную информацию.
11. Устройство по п. 10, в котором блок масштабирования выполнен с возможностью масштабировать первый возможный вариант предиктора вектора движения, используя временную информацию, основанную на временной разнице между кадром, в который включен блок, который необходимо декодировать, и кадром, отличным от кадра, в который включен блок, который необходимо декодировать.
12. Устройство по п. 10, в котором блок масштабирования выполнен с возможностью масштабировать первый возможный вариант предиктора вектора движения, используя временную информацию, основанную на временной разнице между опорным кадром, представленным первым возможным вариантом предиктора вектора движения, и кадром, отличным от кадра, в который включен блок, который необходимо декодировать.
13. Устройство по п. 9, дополнительно содержащее блок добавления, выполненный с возможностью добавления нулевого вектора движения к возможным вариантам предиктора вектора движения для декодирования блока, который должен быть декодирован, используя внешнее предсказание.
14. Устройство по п. 9, дополнительно содержащее блок добавления, выполненный с возможностью формирования нового возможного варианта предиктора вектора движения посредством объединения второго возможного варианта предиктора вектора движения и добавления сформированного нового возможного варианта предиктора вектора движения к возможным вариантам предиктора вектора движения для декодирования блока, который должен быть декодирован, используя внешнее предсказание.
15. Устройство по п. 9, дополнительно содержащее блок добавления, выполненный с возможностью формирования нового возможного варианта предиктора вектора движения посредством добавления смещения ко второму возможному варианту предиктора вектора движения и добавления сформированного нового возможного варианта предиктора вектора движения к возможным вариантам предиктора вектора движения для декодирования блока, который должен быть декодирован, используя внешнее предсказание.
16. Устройство по п. 9, в котором блок удаления выполнен с возможностью, после завершения удаления идентичных возможных вариантов предиктора вектора движения из множества вторых возможных вариантов предиктора вектора движения, удаления по меньшей мере одного идентичного возможного варианта предиктора вектора движения из возможных вариантов предиктора вектора движения, состоящих из первого возможного варианта предиктора вектора движения и одного или более оставшихся вторых возможных вариантов предиктора вектора движения, для декодирования блока, который должен быть декодирован.
17. Способ кодирования изображения, используя внешнее предсказание, содержащий:
извлечение возможных вариантов предиктора вектора движения, для кодирования блока изображения, используя внешнее предсказание, упомянутые возможные варианты предиктора вектора движения включают в себя первый возможный вариант предиктора вектора движения, извлеченный из кадра, отличного от кадра, в который включен блок, который должен быть кодирован, и один или более вторых возможных вариантов предиктора вектора движения, извлеченных из кадра, в который включен блок, который должен быть кодирован; и
в случае, когда множество вторых возможных вариантов предиктора вектора движения извлечены, и идентичные возможные варианты предиктора вектора движения включены среди множества вторых возможных вариантов предиктора вектора движения, удаление по меньшей мере одного идентичного возможного варианта предиктора вектора движения из возможных вариантов предиктора вектора движения для кодирования блока, который должен быть кодирован, используя внешнее предсказание.
18. Способ декодирования кодированного изображения, используя внешнее предсказание, содержащий:
извлечение возможных вариантов предиктора вектора движения для декодирования блока изображения, используя внешнее предсказание, причем упомянутые возможные варианты предиктора вектора движения включают в себя первый возможный вариант предиктора вектора движения, извлеченный из кадра, отличного от кадра, в который включен блок, который должен быть декодирован, и один или более вторых возможных вариантов предиктора вектора движения, извлеченных из кадра, в который включен блок, который должен быть декодирован; и
в случае, когда множество вторых возможных вариантов предиктора вектора движения извлечены блоком извлечения возможного варианта предиктора вектора движения, и идентичные возможные варианты предиктора вектора движения включены среди множества вторых возможных вариантов предиктора вектора движения, удаление по меньшей мере одного идентичного возможного варианта предиктора вектора движения из возможных вариантов предиктора вектора движения для декодирования блока, который должен быть декодирован, используя внешнее предсказание.
19. Носитель данных, содержащий исполняемые процессором команды для предписания процессору осуществлять способ по п. 17.
20. Носитель данных, содержащий исполняемые процессором команды для предписания процессору осуществлять способ по п. 18.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 8000392 B1, 16.08.2011 | |||
| US 7450642 B2, 11.11.2008 | |||
| ПРОСТРАНСТВЕННО-ВРЕМЕННОЕ ПРОГНОЗИРОВАНИЕ ДЛЯ ДВУНАПРАВЛЕНО ПРОГНОЗИРУЕМЫХ (В) ИЗОБРАЖЕНИЙ И ПРОГНОЗИРОВАНИЕ ВЕКТОРА ДВИЖЕНИЯ ДЛЯ КОМПЕНСАЦИИ ДВИЖЕНИЯ МНОЖЕСТВЕННЫХ ИЗОБРАЖЕНИЙ С ПОМОЩЬЮ ЭТАЛОНА | 2003 |
|
RU2310231C2 |

