ОБЛАСТЬ ТЕХНИКИ
Изобретение относится в целом к беспроводной связи и, в частности, к управлению мощностью передач от пользовательского оборудования и к приемам от базовой станции в адаптивно сконфигурированных системах связи дуплексной связи с временным разделением (TDD).
УРОВЕНЬ ТЕХНИКИ
Беспроводная связь является одной из наиболее успешных инноваций в современной истории. Недавно количество абонентов услуг беспроводной связи превысило пять миллиардов и продолжает быстро расти. Потребность в беспроводном трафике данных быстро увеличивается вследствие роста количества индивидуальных и коллективных пользователей смартфонов и других мобильных устройств обработки данных, например планшетов, ноутбуков, нетбуков и устройств чтения электронных книг. Ввиду быстрого роста мобильного трафика данных, повышение эффективности радиоинтерфейса и улучшение выделения нового спектра является задачей первостепенной важности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
Настоящее раскрытие предусматривает управление мощностью для передач от пользовательского оборудования в адаптивно сконфигурированных системах связи дуплексной связи с временным разделением (TDD).
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
В первом варианте осуществления предусмотрен способ. Способ включает в себя передачу, посредством базовой станции, на пользовательское оборудование (UE), первой сигнализации, указывающей первую конфигурацию восходящей-нисходящей линии связи (UL-DL) для дуплексной связи с временным разделением (TDD) из набора конфигураций UL-DL для TDD. Конфигурация UL-DL для TDD задана на протяжении периода времени в десять подкадров (SF), которые содержат SF DL, при которых связь осуществляется в направлении от базовой станции к UE, SF UL, при которых связь осуществляется в направлении от UE к базовой станции, и особые SF, при которых связь может осуществляться в направлении от базовой станции к UE и от UE к базовой станции. Каждый SF из десяти SF имеет уникальный индекс во временной области. Способ также включает в себя передатчик, выполненный с возможностью передачи, на UE, информации первой конфигурации для связи с использованием адаптированных конфигураций UL-DL для TDD. Пригодная адаптированная конфигурация UL-DL для TDD получена из поднабора набора конфигураций UL-DL для TDD. Несколько SF UL или особых SF в первой конфигурации UL-DL для TDD являются SF DL в адаптированной конфигурации UL-DL для TDD, и по меньшей мере один SF UL в первой конфигурации UL-DL для TDD остается SF UL в любой конфигурации UL-DL для TDD из поднабора набора конфигураций UL-DL для TDD. Способ дополнительно включает в себя передачу, посредством базовой станции на UE, информации второй конфигурации для первого набора параметров, связанных с первым процессом управления мощностью (PC) UL, второго набора параметров, связанных со вторым процессом PC UL, и битовой карты, задающей взаимно-однозначное отображение между поднабором предварительно определенных SF, в любой конфигурации UL-DL для TDD из набора конфигураций UL-DL для TDD, и первым набором SF и вторым набором SF. Двоичное значение '0' связывает SF с первым набором SF, и двоичное значение '1' связывает SF со вторым набором SF. Первый набор SF включает в себя все SF, которые являются SF UL в каждой конфигурации UL-DL для TDD из поднабора набора конфигураций UL-DL для TDD, и второй набор SF включает в себя по меньшей мере один SF, который является SF DL в по меньшей мере одной конфигурации UL-DL для TDD из поднабора набора конфигураций UL-DL для TDD. Способ дополнительно включает в себя передачу, посредством базовой станции на UE, второй сигнализации, предписывающей UE передавать физический совместно используемый канал UL (PUSCH) или зондирующего опорного сигнала (SRS) в SF UL адаптированной конфигурации UL-DL для TDD. В ответ на прием, посредством UE, первой сигнализации, информации первой конфигурации, информации второй конфигурации и второй сигнализации, UE передает PUSCH или SRS в SF UL с мощностью, определенной согласно первому процессу PC UL, если SF UL находится в первом наборе SF, или с мощностью, определенной согласно второму процессу PC UL, если SF UL находится во втором наборе SF.
Во втором варианте осуществления предусмотрен способ. Способ включает в себя прием, посредством базовой станции от пользовательского оборудования (UE) первого физического совместно используемого канала восходящей линии связи (PUSCH), переносящего начальную передачу транспортного блока (TB) информации данных, и второго PUSCH, переносящего повторную передачу TB информации данных. Способ также включает в себя объединение, посредством базовой станции, для одной и той же информации данных, первого демодулированного значения в первом PUSCH и второго демодулированного значения во втором PUSCH после масштабирования второго демодулированного значения с коэффициентом. Способ дополнительно включает в себя декодирование, посредством базовой станции, TB информации данных.
В третьем варианте осуществления предусмотрена базовая станция. Базовая станция включает в себя передатчик, выполненный с возможностью передачи, на пользовательское оборудование (UE), первой сигнализации, указывающей первую конфигурацию восходящей-нисходящей линии связи (UL-DL) для дуплексной связи с временным разделением (TDD) из набора конфигураций UL-DL для TDD. Конфигурация UL-DL для TDD задана на протяжении периода времени в десять подкадров (SF), которые содержат SF DL, при которых связь осуществляется в направлении от базовой станции к UE, SF UL, при которых связь осуществляется в направлении от UE к базовой станции, и особые SF, при которых связь может осуществляться в направлении от базовой станции к UE и от UE к базовой станции. Каждый SF из десяти SF имеет уникальный индекс во временной области. Базовая станция также включает в себя передатчик, выполненный с возможностью передачи, на UE, информации первой конфигурации для связи с использованием адаптированных конфигураций UL-DL для TDD. Пригодная адаптированная конфигурация UL-DL для TDD получена из поднабора набора конфигураций UL-DL для TDD. Несколько SF UL или особых SF в первой конфигурации UL-DL для TDD являются SF DL в адаптированной конфигурации UL-DL для TDD, и по меньшей мере один SF UL в первой конфигурации UL-DL для TDD остается SF UL в любой конфигурации UL-DL для TDD из поднабора набора конфигураций UL-DL для TDD. Базовая станция дополнительно включает в себя передатчик, выполненный с возможностью передачи, на UE, информации второй конфигурации для первого набора параметров, связанных с первым процессом управления мощностью (PC) UL, второго набора параметров, связанных со вторым процессом PC UL, и битовой карты, задающей взаимно-однозначное отображение между поднабором предварительно определенных SF, в любой конфигурации UL-DL для TDD из набора конфигураций UL-DL для TDD, и первым набором SF и вторым набором SF. Двоичное значение '0' связывает SF с первым набором SF, и двоичное значение '1' связывает SF со вторым набором SF. Первый набор SF включает в себя все SF, которые являются SF UL в каждой конфигурации UL-DL для TDD из поднабора набора конфигураций UL-DL для TDD, и второй набор SF включает в себя по меньшей мере один SF, который является SF DL в по меньшей мере одной конфигурации UL-DL для TDD из поднабора набора конфигураций UL-DL для TDD. Базовая станция дополнительно включает в себя передатчик, выполненный с возможностью передачи, на UE, второй сигнализации, предписывающей UE передавать физический совместно используемый канал UL (PUSCH) или зондирующего опорного сигнала (SRS) в SF UL адаптированной конфигурации UL-DL для TDD. Базовая станция дополнительно включает в себя приемник, выполненный с возможностью приема, от UE, PUSCH или SRS в SF UL с мощностью, определенной согласно первому процессу PC UL, если SF UL находится в первом наборе SF, или с мощностью, определенной согласно второму процессу PC UL, если SF UL находится во втором наборе SF.
В четвертом варианте осуществления предусмотрено пользовательское оборудование (UE). UE включает в себя приемник, выполненный с возможностью приема, от базовой станции, первой сигнализации, указывающей первую конфигурацию восходящей-нисходящей линии связи (UL-DL) для дуплексной связи с временным разделением (TDD) из набора конфигураций UL-DL для TDD. Конфигурация UL-DL для TDD задана на протяжении периода времени в десять подкадров (SF), которые содержат SF DL, при которых связь осуществляется в направлении от базовой станции к UE, SF UL, при которых связь осуществляется в направлении от UE к базовой станции, и особые SF, при которых связь может осуществляться в направлении от базовой станции к UE и от UE к базовой станции. Каждый SF из десяти SF имеет уникальный индекс во временной области. UE также включает в себя приемник, выполненный с возможностью приема, от базовой станции, информацию первой конфигурации для связи с использованием адаптированных конфигураций UL-DL для TDD. Пригодная адаптированная конфигурация UL-DL для TDD получена из поднабора набора конфигураций UL-DL для TDD. Несколько SF UL или особых SF в первой конфигурации UL-DL для TDD являются SF DL в адаптированной конфигурации UL-DL для TDD, и по меньшей мере один SF UL в первой конфигурации UL-DL для TDD остается SF UL в любой конфигурации UL-DL для TDD из поднабора набора конфигураций UL-DL для TDD. UE дополнительно включает в себя приемник, выполненный с возможностью приема, от базовой станции, информации второй конфигурации для первого набора параметров, связанных с первым процессом управления мощностью (PC) UL, второго набора параметров, связанных со вторым процессом PC UL, и битовой карты, задающей взаимно-однозначное отображение между поднабором предварительно определенных SF, в любой конфигурации UL-DL для TDD из набора конфигураций UL-DL для TDD, и первым набором SF и вторым набором SF. Двоичное значение '0' связывает SF с первым набором SF, и двоичное значение '1' связывает SF со вторым набором SF. Первый набор SF включает в себя все SF, которые являются SF UL в каждой конфигурации UL-DL для TDD из поднабора набора конфигураций UL-DL для TDD, и второй набор SF включает в себя по меньшей мере один SF, который является SF DL в по меньшей мере одной конфигурации UL-DL для TDD из поднабора набора конфигураций UL-DL для TDD. UE дополнительно включает в себя приемник, выполненный с возможностью приема, от базовой станции, второй сигнализации, предписывающей UE передавать физический совместно используемый канал UL (PUSCH) или зондирующего опорного сигнала (SRS) в SF UL адаптированной конфигурации UL-DL для TDD. UE также включает в себя передатчик, выполненный с возможностью передачи, на базовую станцию, PUSCH или SRS в SF UL с мощностью, определенной согласно первому процессу PC UL, если SF UL находится в первом наборе SF, или с мощностью, определенной согласно второму процессу PC UL, если SF UL находится во втором наборе SF.
В пятом варианте осуществления предусмотрена базовая станция. Базовая станция включает в себя приемник, выполненный с возможностью приема, от пользовательского оборудования (UE), первый физический совместно используемый канал восходящей линии связи (PUSCH), переносящий начальную передачу транспортного блока (TB) информации данных, и второго PUSCH, переносящего повторную передачу TB информации данных. Базовая станция также включает в себя объединитель, выполненный с возможностью объединения, для одной и той же информации данных, первого демодулированного значения в первом PUSCH и второго демодулированного значения во втором PUSCH после масштабирования второго демодулированного значения с коэффициентом. Базовая станция дополнительно включает в себя декодер, выполненный с возможностью декодирования TB информации данных.
Прежде чем перейти к рассмотрению нижеследующего подробного описания, предпочтительно дать определения некоторых слов и выражений, используемых на протяжении этого патентного документа. Термин "связывать" и его производные относятся к любой прямой или косвенной связи между двумя или более элементами, независимо от того, находятся ли эти элементы в физическом контакте друг с другом. Термины "передавать", "принимать" и "сообщать", а также их производные, охватывают как прямую, так и косвенную связь. Термины “включают в себя” и “содержат”, а также их производные, означают включение без ограничения. Термин "или" является включительным, в смысле и/или. Выражения “связанный с” и “в связи с этим”, а также их производные, может означать "включающий в себя", "включенный в", "связанный с", "содержащий", "содержащийся в", "подключенный к", "соединенный с", "присоединенный к", "имеющий возможность осуществлять связь с", "взаимодействующий с", "перемежающийся", "примыкающий к", "находящийся вблизи", "привязанный к", "имеющий", "обладающий свойством" и т.п. Термин “контроллер” означает любое устройство, систему или ее часть, которое/ый управляет по меньшей мере одной операцией. Такой контроллер может быть реализован в оборудовании или комбинации оборудования и программного обеспечения и/или программно-аппаратного обеспечения. Функциональные возможности, связанные с любым конкретным контроллером, могут быть централизованными или распределенными, локально или дистанционно. Выражение "по меньшей мере один из", при использовании со списком элементов, означает, что можно использовать разные комбинации из одного или более из перечисленных элементов, и может требоваться только один элемент в списке. Например, "по меньшей мере один из: A, B и C" включает в себя любую из следующих комбинаций: A; B; C; A и B; A и C; B и C; A, и B, и C.
Кроме того, различные описанные ниже функции могут реализоваться или поддерживаться одной или более компьютерными программами, каждая из которых сформирована из компьютерно-читаемого программного кода и воплощена в компьютерно-читаемом носителе. Термины "приложение" и "программа" относятся к одной или более компьютерным программам, программным компонентам, наборам инструкций, процедурам, функциям, объектам, классам, экземплярам, соответствующим данным или их части, адаптированным для реализации в подходящем компьютерно-читаемым программным кодом. Выражение "компьютерно-читаемый программный код" включает в себя любой тип компьютерного кода, включая исходный код, объектный код и исполнимый код. Выражение "компьютерно-читаемый носитель" включает в себя любой тип носителя к которому может обращаться компьютер, например постоянную память (ROM), оперативную память (RAM), жесткий диск, компакт-диск (CD), цифровой видеодиск (DVD) или память любого другого типа. Понятие "нетранзиторного" компьютерно-читаемого носителя не включает в себя проводные, беспроводные, оптические или другие линии связи, которые переносят транзиторные (кратковременные) электрические или другие сигналы. Нетранзиторный (некратковременный) компьютерно-читаемый носитель включает в себя носители, где данные могут храниться постоянно, и носители, где данные могут храниться и затем перезаписываться, например перезаписываемый оптический диск или стираемое запоминающее устройство.
Определения некоторых других слов и выражений обеспечены на протяжении этого патентного документа. Специалистам в данной области техники очевидно, что во многих, если не в большинстве случаях, такие определения применимы к предыдущим, а также будущим вариантам использования таких определенных слов и выражений.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более полного понимания настоящего раскрытия и его преимуществ обратимся к нижеследующему описанию, приведенному совместно с прилагаемыми чертежами, где аналогичные ссылочные позиции представляют аналогичные части:
фиг. 1 демонстрирует пример сети беспроводной связи согласно этому раскрытию;
фиг. 2 демонстрирует пример пользовательского оборудования (UE) согласно этому раскрытию;
фиг. 3 демонстрирует пример eNodeB (eNB) согласно этому раскрытию;
фиг. 4 демонстрирует пример структуры передачи PUSCH в течение интервала времени передачи (TTI) согласно этому раскрытию;
фиг. 5 демонстрирует пример структуры передатчика UE для информации данных и UCI в PUSCH согласно этому раскрытию;
фиг. 6 демонстрирует пример структуры приемника eNB для информации данных и UCI в PUSCH согласно этому раскрытию;
фиг. 7 демонстрирует пример структуры передатчика для последовательности ZC, которую можно использовать в качестве DMRS или в качестве SRS, согласно этому раскрытию;
фиг. 8 демонстрирует пример разных характеристик помехи в разных гибких TTI UL согласно этому раскрытию;
фиг. 9 демонстрирует пример использования поля PCC в формате DCI для связывания соответствующей передачи PUSCH с первым процессом PC UL или со вторым процессом PC UL согласно этому раскрытию;
фиг. 10 демонстрирует пример использования поля TPC в формате DCI, планирующем PUSCH в зависимости от того, может ли он указывать использование первого процесса PC UL или второго процесса PC UL, согласно этому раскрытию;
фиг. 11 демонстрирует пример процесса для UE для определения, использовать ли первый процесс PC UL или второй процесс PC UL для неадаптивной повторной передачи TB данных в PUSCH согласно этому раскрытию;
фиг. 12 демонстрирует пример процесса для UE для получения команд TPC для первого процесса PC UL и команд TPC для второго процесса PC UL из разных соответствующих форматов DCI 3/3A согласно этому раскрытию;
фиг. 13 демонстрирует пример определения на UE команды TPC для первого процесса PC UL и команды TPC для второго процесса PC UL в одном и том же формате DCI 3/3A согласно этому раскрытию;
фиг. 14 демонстрирует пример осуществления первого процесса CLPC и второго процесса CLPC после адаптации конфигурации UL-DL для TDD согласно этому раскрытию;
фиг. 15 демонстрирует пример использования первого  для определения объема ресурсов CSI в первом TTI и использования второго
для определения объема ресурсов CSI в первом TTI и использования второго  для определения объема ресурсов CSI во втором TTI согласно этому раскрытию;
для определения объема ресурсов CSI во втором TTI согласно этому раскрытию;
фиг. 16 демонстрирует пример использования сдвига  индекса MCS для UE для определения индекса MCS для повторной передачи TB данных согласно этому раскрытию;
индекса MCS для UE для определения индекса MCS для повторной передачи TB данных согласно этому раскрытию;
фиг. 17 демонстрирует пример масштабирования демодулированных значений для битов информации данных из повторной передачи TB данных до объединения с демодулированными значениями для битов информации данных из начальной передачи одного и того же TB данных до декодирования согласно этому раскрытию.
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
Рассмотренные ниже фиг. 1-17 и различные варианты осуществления, используемые для описания принципов настоящего раскрытия в этом патентном документе, приведены исключительно в порядке иллюстрации и никоим образом не призваны ограничивать объем раскрытия. Специалистам в данной области техники очевидно, что принципы настоящего раскрытия можно реализовать в любой надлежащим образом организованной системе беспроводной связи.
Таким образом, следующие документы и описания стандартов включены в состав настоящее раскрытия, как если бы были полностью изложены здесь: 3GPP TS 36.211 v11.1.0, "E-UTRA, Physical channels and modulation" (REF 1); 3GPP TS 36.212 v11.1.0, "E-UTRA, Multiplexing and Channel coding" (REF 2); 3GPP TS 36.213 v11.1.0, "E-UTRA, Physical Layer Procedures" (REF 3); и 3GPP TS 36.331 v11.1.0, "E-UTRA, Radio Resource Control (RRC) Protocol Specification". (REF 4).
Это раскрытие относится к адаптации направления связи в сетях беспроводной связи, где используется дуплексная связь с временным разделением (TDD). Сеть беспроводной связи включает в себя нисходящую линию связи (DL), которая переносит сигналы от точек передачи (например, базовых станций или eNodeB) на экземпляры пользовательского оборудования (UE). Сеть беспроводной связи также включает в себя восходящую линию связи (UL), которая переносит сигналы от UE на точки приема, например eNodeB.
Фиг. 1 демонстрирует пример беспроводная сеть 100 согласно этому раскрытию. Вариант осуществления беспроводной сети 100, показан на фиг. 1 исключительно для иллюстрации. Другие варианты осуществления беспроводной сети 100 можно использовать, не выходя за рамки объема этого раскрытия.
Как показано на фиг. 1, беспроводная сеть 100 включает в себя eNodeB (eNB) 101, eNB 102 и eNB 103. eNB 101 осуществляет связь с eNB 102 и eNB 103. eNB 101 также осуществляет связь с по меньшей мере одной сетью 130 интернет-протокола (IP), например интернетом, частной IP-сетью иили другой сетью передачи данных.
В зависимости от типа сети вместо "eNodeB" или "eNB", можно использовать другие общеизвестные термины, например "базовая станция" или "точка доступа". Для удобства термины "eNodeB" и "eNB" используются в этом патентном документе в отношении компонентов сетевой инфраструктуры, которые обеспечивают беспроводной доступ к удаленным терминалам. Кроме того, в зависимости от типа сети, вместо "пользовательское оборудование" или "UE" можно использовать другие общеизвестные термины, например, "мобильная станция", "абонентская станция", "удаленный терминал", "беспроводной терминал" или "пользовательское устройство". Для удобства, термины "пользовательское оборудование" и "UE" используются в этом патентном документе в отношении удаленного беспроводного оборудования, которое осуществляет беспроводной доступ к eNB, вне зависимости от того, является ли UE мобильным устройством (например, мобильным телефоном или смартфоном) или обычно рассматриваемым стационарным устройством (например, настольным компьютером или торговым автоматом).
eNB 102 обеспечивает беспроводной широкополосный доступ к сети 130 для первого множества экземпляров пользовательского оборудования (UEs) в зоне 120 покрытия eNB 102. Первое множество UE включает в себя UE 111, которое может располагаться на малом предприятии (SB); UE 112, которое может располагаться на предприятии (E); UE 113, которое может располагаться на активном участке (HS) WiFi; UE 114, которое может располагаться в первом жилом помещении (R); UE 115, которое может располагаться во второй жилом помещении (R); и UE 116, которое может быть мобильным устройством (M), например, сотовым телефоном, портативным компьютером с возможностью беспроводной связи, беспроводным PDA и т.п. eNB 103 обеспечивает беспроводной широкополосный доступ к сети 130 для второго множества UE в зоне 125 покрытия eNB 103. Второе множество UE включает в себя UE 115 и UE 116. В некоторых вариантах осуществления один или более из eNB 101-103 могут осуществлять связь друг с другом и с UE 111-116 с использованием 5G, LTE, LTE-A, WiMAX или других передовых методов беспроводной связи.
Пунктирные линии демонстрируют приблизительные границы зон 120 и 125 покрытия, которые изображены приблизительно круглыми исключительно в целях иллюстрации и объяснения. Следует отчетливо понимать, что зоны покрытия, связанные с eNB, например, зоны 120 и 125 покрытия, могут иметь другие формы, в том числе, неправильные формы, в зависимости от конфигурации eNB и изменениями условий радиосвязи, связанными с естественными и рукотворными препятствиями.
Как более подробно описано ниже, различные компоненты сети 100 (например, eNB 101-103 и/или UE 111-116) поддерживают управление мощностью восходящей линии связи в сети 100, которая может использовать TDD.
Хотя фиг. 1 иллюстрирует один пример беспроводной сети 100, в фиг. 1 можно вносить различные изменения. Например, беспроводная сеть 100 может включать в себя любое количество eNB и любое количество UE в любой подходящей конфигурации. Кроме того, eNB 101 может осуществлять связь непосредственно с любым количеством UE и обеспечивать этим UE беспроводной широкополосный доступ к сети 130. Аналогично, каждый eNB 102-103 может осуществлять связь непосредственно с сетью 130 и обеспечивать UE прямой беспроводной широкополосный доступ к сети 130. Кроме того, eNB 101, 102 и/или 103 могут обеспечивать доступ к другим или дополнительным внешним сетям, например, внешним телефонным сетям или сетям передачи данных других типов.
Фиг. 2 демонстрирует пример UE 114 согласно этому раскрытию. Вариант осуществления UE 114 показан на фиг. 2 исключительно для иллюстрации, и другие UE на фиг. 1, могут иметь такую же или аналогичную конфигурацию. Однако UE демонстрируют самые разнообразные конфигурации, и фиг. 2 не ограничивает объем этого раскрытия никакой конкретной реализацией UE.
Как показано на фиг. 2, UE 114 включает в себя антенну 205, радиочастотный (РЧ) приемопередатчик 210, схему 215 обработки передающего тракта (TX), микрофон 220 и схему 225 обработки приемного тракта (RX). UE 114 также включает в себя громкоговоритель 230, главный процессор 240, интерфейс 245 (IF) ввод/вывод (I/O), клавишную панель 250, дисплей 255 и память 260. Память 260 включает в себя программу 261 базовой операционной системы (OS) и одно или более приложений 262.
РЧ приемопередатчик 210 принимает, от антенны 205, входной радиосигнал, передаваемый eNB или другим UE. РЧ приемопередатчик 210 выполняет понижающее преобразование входного радиосигнал для генерации сигнала промежуточной частоты (ПЧ) или основной полосы. Сигнал IF или основной полосы поступает на схему 225 обработки RX, которая генерирует обработанный сигнал основной полосы путем фильтрации, декодирования и/или оцифровки сигнала основной полосы или ПЧ. Схема 225 обработки RX передает обработанный сигнал основной полосы на громкоговоритель 230 (например, для речевых данных) или на главный процессор 240 для дальнейшей обработки (например, для данных веб-обозревания).
Схема 215 обработки TX принимает аналоговые или цифровые речевые данные от микрофона 220 или другие выходные данные основной полосы (например веб-данные, электронную почту или данные интерактивных видеоигр) от главного процессора 240. Схема 215 обработки TX кодирует, мультиплексирует и/или оцифровывает выходные данные основной полосы для генерации обработанного сигнала основной полосы или ПЧ. РЧ приемопередатчик 210 принимает выходной обработанный сигнал основной полосы или ПЧ от схемы 215 обработки TX и выполняет повышающее преобразование сигнала основной полосы или ПЧ в радиосигнал, который передается через антенну 205.
Главный процессор 240 может включать в себя один или более процессоров или другие устройства обработки и может выполнять программу 261 базовая OS, хранящуюся в памяти 260, для управления работой UE 114 в целом. Например, главный процессор 240 может управлять приемом сигналов прямого канала и передачей сигналов обратного канала РЧ приемопередатчиком 210, схемой 225 обработки RX и схемой 215 обработки TX в соответствии с общеизвестными принципами. В некоторых вариантах осуществления главный процессор 240 включает в себя по меньшей мере один микропроцессор или микроконтроллер.
Главный процессор 240 также способен выполнять другие процессы и программы, присутствующие в памяти 260. Главный процессор 240 может перемещать данные в или из памяти 260, что необходимо для выполнения процесса, например операции, поддерживающие управление мощностью восходящей линии связи в адаптивно сконфигурированных системах связи дуплексной связи с временным разделением (TDD). В некоторых вариантах осуществления главный процессор 240 выполнен с возможностью выполнения приложений 262 на основе программы 261 OS или в ответ на сигналы, принятые от eNB, других UE или оператора. Главный процессор 240 также подключен к интерфейсу 245 ввода-вывода, который позволяет UE 114 подключаться к другим устройствам например, портативным компьютерам и карманным компьютерам. Интерфейс 245 ввода-вывода является каналом связи между этими принадлежностями и главным процессором 240.
Главный процессор 240 также подключен к клавишной панели 250 и блоку 255 отображения. Оператор UE 114 может использовать клавишную панель 250 для ввода данных в UE 114. Дисплей 255 может быть жидкокристаллическим дисплеем или другим дисплеем, способным визуализировать текст и/или, по меньшей мере, ограниченную графику, например, из веб-сайтов. Дисплей 255 также может представлять собой сенсорный экран.
Память 260 подключена к главному процессору 240. Часть памяти 260 может включать в себя оперативную память (RAM), и другая часть памяти 260 может включать в себя флэш-память или другую постоянную память (ROM).
Как более подробно описано ниже, передающий и приемный тракты UE 114 (реализованные с использованием РЧ приемопередатчика 210, схемы 215 обработки TX и/или схемы 225 обработки RX) поддерживают сигнализацию нисходящей линии связи для адаптации восходящей линии связи и нисходящей линии связи в адаптивно конфигурируемых системах TDD.
Хотя фиг. 2 иллюстрирует один пример UE 114, можно вносить различные изменения в фиг. 2. Например, различные компоненты на фиг. 2 можно объединять, дополнительно подразделять или исключать, и дополнительные компоненты можно добавлять согласно конкретным нуждам. В порядке конкретного примера, главный процессор 240 может делиться на множественные процессоры, например, один или более центральных процессоров (CPU) и один или более графических процессоров (GPU). Кроме того, хотя фиг. 2 иллюстрирует UE 114, сконфигурированный как мобильный телефон или смартфон, UE могут быть выполнены с возможностью работы в качестве мобильных или стационарных устройств других типов. Кроме того, различные компоненты на фиг. 2 можно дублировать, например, когда разные РЧ компоненты используются для осуществления связи с eNB 101-103 и с другими UE.
Фиг. 3 демонстрирует пример eNB 102 согласно этому раскрытию. Вариант осуществления eNB 102 показан на фиг. 3 исключительно для иллюстрации, и другие eNB, показанные на фиг. 1, могут иметь такую же или аналогичную конфигурацию. Однако eNB демонстрируют самые разнообразные конфигурации, и фиг. 3 не ограничивает объем этого раскрытия никакой конкретной реализацией eNB.
Как показано на фиг. 3, eNB 102 включает в себя множественные антенны 305a-305n, множественные РЧ приемопередатчики 310a-310n, схему 315 обработки передающего тракта (TX) и схему 320 обработки приемного тракта (RX). eNB 102 также включает в себя контроллер/процессор 325, память 330 и магистральный или сетевой интерфейс 335.
РЧ приемопередатчики 310a-310n принимают, от антенн 305a-305n, входные радиосигналы, например сигналы, передаваемые UE или другими eNB. РЧ приемопередатчики 310a-310n выполняют понижающее преобразование входных радиосигналов для генерации сигналов ПЧ или основной полосы. Сигналы ПЧ или основной полосы поступают на схему 320 обработки RX, которая генерирует обработанные сигналы основной полосы путем фильтрации, декодирования и/или оцифровки сигналов основной полосы или ПЧ. Схема 320 обработки RX передает обработанные сигналы основной полосы на контроллер/процессор 325 для дальнейшей обработки.
Схема 315 обработки TX принимает аналоговые или цифровые данные (например, речевые данные, веб-данные, электронную почту или данные интерактивных видеоигр) от контроллера/процессора 325. Схема 315 обработки TX кодирует, мультиплексирует и/или оцифровывает выходные данные основной полосы для генерации обработанных сигналов основной полосы или ПЧ. РЧ приемопередатчики 310a-310n принимают выходные обработанные сигналы основной полосы или ПЧ от схемы 315 обработки TX и выполняет повышающее преобразование сигналов основной полосы или ПЧ в радиосигналы, которые передаются через антенны 305a-305n.
Контроллер/процессор 325 может включать в себя один или более процессоров или другие устройства обработки, которые управляют работой eNB 102 в целом. Например, контроллер/процессор 325 может управлять приемом сигналов прямого канала и передачей сигналов обратного канала РЧ приемопередатчиками 310a-310n, схемой 320 обработки RX и схемой 315 обработки TX в соответствии с общеизвестными принципами. Контроллер/процессор 325 также может поддерживать дополнительные функции, например, более передовые функции беспроводной связи. Например, контроллер/процессор 325 может поддерживать операции формирования диаграммы направленности или направленной маршрутизации, в которых выходные сигналы от множественных антенн 305a-305n взвешиваются по-разному, чтобы эффективно направлять выходные сигналы в желаемом направлении. Любая из самых разнообразных других функций может поддерживаться на eNB 102 контроллером/процессором 325. В некоторых вариантах осуществления контроллер/процессор 325 включает в себя по меньшей мере один микропроцессор или микроконтроллер.
Контроллер/процессор 325 также способен выполнять программы и другие процессы, присутствующие в памяти 330, например базовую OS и операции, поддерживающие управление мощностью восходящей линии связи в адаптивно сконфигурированных системах связи дуплексной связи с временным разделением (TDD). Контроллер/процессор 325 может перемещать данные в или из памяти 330, что необходимо для выполнения процесса.
Контроллер/процессор 325 также подключен к магистральному или сетевому интерфейсу 335. Магистральный или сетевой интерфейс 335 позволяет eNB 102 осуществлять связи с другими устройствами или системами по магистральному соединению или по сети. Интерфейс 335 может поддерживать связь по любому(ым) подходящему(им) проводному(ым) или беспроводному(ым) соединению(ям). Например, когда eNB 102 реализован в виде части системы сотовой связи (например, поддерживающей 5G, LTE или LTE-A), интерфейс 335 может позволять eNB 102 для осуществления связи с другими eNB по проводному или беспроводному магистральному соединению. Когда eNB 102 реализован в виде точки доступа, интерфейс 335 может позволять eNB 102 осуществлять связь по проводной или беспроводной локальной сети или по проводному или беспроводному соединению с более крупной сетью (например, интернетом). Интерфейс 335 включает в себя любую подходящую структуру, поддерживающую связь по проводному или беспроводному соединению, например Ethernet или РЧ приемопередатчик.
Память 330 подключена к контроллеру/процессору 325. Часть памяти 330 может включать в себя RAM, и другая часть памяти 330 может включать в себя флэш-память или другую ROM.
Как более подробно описано ниже, передающий и приемный тракты eNB 102 (реализованные с использованием РЧ приемопередатчиков 310a-310n, схемы 315 обработки TX и/или схемы 320 обработки RX) поддерживают сигнализацию нисходящей линии связи для адаптации восходящей линии связи и нисходящей линии связи в адаптивно конфигурируемых системах TDD.
Хотя фиг. 3 иллюстрирует один пример eNB 102, можно вносить различные изменения в фиг. 3. Например, eNB 102 может включать в себя любое количество каждого компонента, показанного на фиг. 3. В порядке конкретного примера, точка доступа может включать в себя несколько интерфейсов 335, и контроллер/процессор 325 может поддерживать функции маршрутизации для маршрутизации данных между разными сетевыми адресации. В порядке другого конкретного примера, хотя он показан включающим в себя единичный экземпляр схемы 315 обработки TX и единичный экземпляр схемы 320 обработки RX, eNB 102 может включать в себя множественные экземпляры каждой из них (например, по одному на каждый РЧ приемопередатчик).
В некоторых беспроводных сетях сигналы DL включают в себя сигналы данных, переносящие информационное наполнение, сигналы управления, переносящие информацию управления DL (DCI) и опорные сигналы (RS), также известные как пилот-сигналы. eNB, например eNB 102, передает информацию данных через соответствующие физические совместно используемые каналы DL (PDSCH). eNB 102 передает DCI по физическим каналам управления DL (PDCCH) или улучшенные PDCCH (EPDCCH). PDCCH передается посредством одного или более элементов канала управления (CCE), тогда как EPDCCH передается посредством ECCE (см. также REF 1). eNB, например eNB 102, передает один или более из множественных типов RS, включающих в себя RS, общего для UE (CRS), RS информации состояния канала (CSI-RS) и RS демодуляции (DMRS). CRS эффективно передается по всей полосе DL (BW) и может использоваться UE, например UE 114, для демодуляции PDSCH или PDCCH или для осуществления измерений. eNB 102 также может передавать CSI-RS с меньшей плотностью во временной и/или частотной области, чем CRS. Для измерения канала можно использовать ресурсы CSI-RS ненулевой мощности (NZP CSI-RS). Для измерения помехи, UE 114 может использовать ресурсы измерение помехи CSI (CSI-IM), связанные с CSI-RS нулевой мощности (ZP CSI-RS), который eNB 102 конфигурирует на UE с использованием сигнализации более высокого уровня (см. также REF 1 и REF 3). DMRS передается только в BW соответствующего PDSCH или PDCCH, и UE 114 может использовать DMRS для когерентной демодуляции информации в PDSCH или EPDCCH (см. также REF 1).
В некоторых беспроводных сетях сигналы UL могут включать в себя сигналы данных, переносящие информационное наполнение, сигналы управления, переносящие информацию управления UL (UCI), и RS. UE 114 передает информацию данных или UCI через соответствующий физический совместно используемый канал UL (PUSCH) или физический канал управления UL (PUCCH). Если UE 114 передает информацию данных и UCI в одном и том же интервале времени передачи (TTI), UE 114 может мультиплексировать оба из них в PUSCH. UCI включает в себя информацию квитирования смешанного автоматического запрашивания повторной передачи (HARQ-ACK), указывающую верное (ACK) или неверное (NACK) обнаружение транспортных блоков данных (TB) в запросе планирования (SR) PDSCH, указывающем, имеет ли UE 114 данные в своем буфере, и информацию состояния канала (CSI), позволяющую eNB 102 выбирать надлежащие параметры для передач PDSCH или PDCCH на UE 114. Если UE 114 не удается обнаружить PDCCH, планирующий PDSCH, UE 114 может указывать это с использованием состояния HARQ-ACK, именуемого DTX. DTX и NACK часто может отображаться в одно и то же значение (значение NACK/DTX, см. также REF 3). UL RS включает в себя DMRS и зондирующий RS (SRS). DMRS передается только в BW соответствующего PUSCH или PUCCH. eNB 102 может использовать DMRS для когерентной демодуляции информации в PUSCH или PUCCH. UE 114 передает SRS для обеспечения UL CSI для eNB 102.
Передача SRS от UE может осуществляться периодически (P-SRS) с предварительно определенными TTI с параметрам передачи, сконфигурированным для UE 114 посредством сигнализации более высокого уровня, например сигнализации управления радиоресурсами (RRC), или может осуществляться апериодически (A-SRS), будучи инициированы форматом DCI, переносимым по PDCCH или EPDCCH, планирующим PUSCH или PDSCH. Во всех следующих описаниях, если не указано обратное, параметр именуется определяемым конфигурацией, если его значение обеспечивается посредством сигнализации более высокого уровня, например RRC, и именуется динамически определяемым, если его значение обеспечивается форматом DCI, переносимым в PDCCH или EPDCCH.
Фиг. 4 демонстрирует пример структуры передачи PUSCH на протяжении TTI согласно этому раскрытию. Вариант осуществления структуры 400 передачи PUSCH на протяжении TTI показан на фиг. 4 исключительно для иллюстрации. Другие варианты осуществления можно использовать, не выходя за рамки объема настоящего раскрытия.
Как показано на фиг. 4, TTI соответствует одному подкадру 410, который включает в себя два слота. Каждый слот 420 включает в себя  символов 430 для передачи информации данных, UCI, или RS. Некоторые символы TTI в каждом слоте используются для передачи DMRS 440. BW передачи включает в себя единицы частотных ресурсов, которые именуются блоками ресурсов (RB). Каждый RB включает в себя
символов 430 для передачи информации данных, UCI, или RS. Некоторые символы TTI в каждом слоте используются для передачи DMRS 440. BW передачи включает в себя единицы частотных ресурсов, которые именуются блоками ресурсов (RB). Каждый RB включает в себя  поднесущих, или ресурсных элементов (RE), и UE 114 выделяется
поднесущих, или ресурсных элементов (RE), и UE 114 выделяется  RB 450 для всех
RB 450 для всех  RE для BW передачи PUSCH. Последний символ TTI можно использовать для мультиплексирования передач 460 SRS от одного или более UE. Количество доступных символов TTI для передачи данных/UCI/DMRS равно
RE для BW передачи PUSCH. Последний символ TTI можно использовать для мультиплексирования передач 460 SRS от одного или более UE. Количество доступных символов TTI для передачи данных/UCI/DMRS равно  , где
, где  , если для передачи SRS используется последний символ TTI, и
, если для передачи SRS используется последний символ TTI, и  в противном случае.
в противном случае.
Фиг. 5 демонстрирует пример структуры передатчика UE для информации данных и UCI в PUSCH согласно этому раскрытию. Вариант осуществления передатчика UE 500 показан на фиг. 5 исключительно для иллюстрации. Другие варианты осуществления можно использовать, не выходя за рамки объема настоящего раскрытия. В некоторых вариантах осуществления передатчик 500 располагается на UE 114.
Как показано на фиг. 5, кодированные и модулированные символы 205 CSI и кодированные и модулированные символы 510 данных мультиплексируются мультиплексором 520. Затем кодированные и модулированные символы HARQ-ACK вставляются мультиплексором 530 путем прореживания символов данных и/или символов CSI. Передача RI аналогична передаче HARQ-ACK (не показана). Блок 540 DFT обеспечивает дискретное преобразование Фурье (DFT), блок 555 выбора выбирает RE 550, соответствующие BW передачи PUSCH, блок 560 IFFT осуществляет обратное быстрое преобразование Фурье (IFFT), фильтр 570 фильтрует выходной сигнал, и усилитель 580 мощности (PA) придает ему определенную мощность, после чего, сигнал передается 590. Для краткости, дополнительные схемы передатчика, например, цифроаналоговый преобразователь, фильтры, усилители и передающие антенны, а также кодеры и модуляторы для символов данных и символов UCI опущены для краткости.
Фиг. 6 демонстрирует пример структуры приемника eNB для информации данных и UCI в PUSCH согласно этому раскрытию. Вариант осуществления приемника eNB 600 показан на фиг. 6 исключительно для иллюстрации. Другие варианты осуществления можно использовать, не выходя за рамки объема настоящего раскрытия. В некоторых вариантах осуществления приемник eNB 600 располагается на eNB 102.
Как показано на фиг. 6, фильтр 620 фильтрует принятый сигнал 610, блок 630 FFT применяет быстрое преобразование Фурье (FFT), блок 640 выбора выбирает RE 650, используемые передатчиком, блок обратного DFT (IDFT) применяет IDFT 660, демультиплексор 670 извлекает кодированные символы HARQ-ACK и размещает стирания в соответствующих RE для символов данных и символов CSI и, наконец, другой демультиплексор 680 разделяет кодированные символы 690 данных и кодированные символы 695 CSI. Прием кодированных символов RI аналогичен приему кодированных символов HARQ-ACK (не показан). Дополнительные схемы приемника, например блок оценивания канала, демодуляторы и декодеры для данных и символов UCI, для краткости не показаны.
Предполагая, для простоты, передачу одного TB данных в PUSCH, UE 114 определяет количество кодированных символов модуляции в расчете на уровень  для передачи HARQ-ACK согласно уравнению 1 (см. также REF 2)
для передачи HARQ-ACK согласно уравнению 1 (см. также REF 2)
<уравнение 1>

где  – потолочная функция, округляющая число до минимального превышающего его целого числа,
– потолочная функция, округляющая число до минимального превышающего его целого числа,  – количество информационных битов HARQ-ACK,
– количество информационных битов HARQ-ACK,  – BW передачи PUSCH в текущем TTI для TB данных,
– BW передачи PUSCH в текущем TTI для TB данных,  – количество символов TTI для начальной передачи PUSCH для одного и того же TB данных,
– количество символов TTI для начальной передачи PUSCH для одного и того же TB данных,  – значение, сконфигурированное на UE от eNB 102 посредством сигнализации более высокого уровня,
– значение, сконфигурированное на UE от eNB 102 посредством сигнализации более высокого уровня,  – BW передачи PUSCH для начальной передачи PUSCH для одного и того же TB данных,
– BW передачи PUSCH для начальной передачи PUSCH для одного и того же TB данных,  – количество кодовых блоков, и
– количество кодовых блоков, и  – количество битов для количества
– количество битов для количества  кодовых блоков. Когда PUSCH содержит только CSI, помимо HARQ-ACK, UE определяет количество кодированных символов модуляции в расчете на уровень для HARQ-ACK как
кодовых блоков. Когда PUSCH содержит только CSI, помимо HARQ-ACK, UE определяет количество кодированных символов модуляции в расчете на уровень для HARQ-ACK как  , где
, где  – минимальное количество информационных битов CSI, включающих в себя биты циклического контроля по избыточности (CRC). Такое же определение количества кодированных символов модуляции в расчете на уровень применяется для передачи RI, где
– минимальное количество информационных битов CSI, включающих в себя биты циклического контроля по избыточности (CRC). Такое же определение количества кодированных символов модуляции в расчете на уровень применяется для передачи RI, где  заменен
заменен  . Для CSI, количество кодированных символов модуляции в расчете на уровень определяется как согласно
. Для CSI, количество кодированных символов модуляции в расчете на уровень определяется как согласно  , где – количество битов CSI,
, где – количество битов CSI,  – количество битов CRC, заданное согласно
– количество битов CRC, заданное согласно 
 – количество информационных битов в расчете на символ модуляция. Если RI не передается, то
– количество информационных битов в расчете на символ модуляция. Если RI не передается, то  . Процесс кодирования битов HARQ-ACK или битов RI или битов CSI не рассматривается, поскольку не является предметом этого раскрытия (см. REF 2).
. Процесс кодирования битов HARQ-ACK или битов RI или битов CSI не рассматривается, поскольку не является предметом этого раскрытия (см. REF 2).
В уравнении 1 параметр для соответствующего типа UCI служит для отделения коэффициента блоковых ошибок (BLER) для TB данных от BLER для типа UCI, поскольку он обратно пропорционален спектральной эффективности передачи TB данных. Например, для данного отношения сигнала к шуму плюс помеха (SINR), планировщик eNB 102 может использовать более высокую спектральную эффективность для передачи TB данных, что приводит к повышению рабочей точки BLER для TB данных, но может поддерживать фиксированный BLER для типа UCI путем увеличения соответствующего значения , что, в свою очередь, приведет к увеличению количества RE, выделенных UCI для мультиплексирования в PUSCH.
Передача DMRS или SRS может осуществляться через передачу соответствующей последовательности Задова-Чу (ZC). Для системной BW UL, равной  RB, последовательность
RB, последовательность  может задаваться циклическим сдвигом (CS)
может задаваться циклическим сдвигом (CS)  базовой последовательности
базовой последовательности  согласно
согласно  , где
, где  – длина последовательности, 1≤m≤, и
– длина последовательности, 1≤m≤, и  , где q-я корневая последовательность ZC задана как
, где q-я корневая последовательность ZC задана как  , 0≤m≤
, 0≤m≤ , где
, где  задано как
задано как  и
и  задано как
задано как  . Длина
. Длина  последовательности ZC задается наибольшим простым числом, для которого
последовательности ZC задается наибольшим простым числом, для которого  (см. также REF 1). Множественные последовательности ZC можно задавать на основе единичной базовой последовательности с использованием разных значений . Передача DMRS в двух или более символах TTI, как на фиг. 1, также может модулироваться ортогональным покрывающим кодом (OCC). Для передачи DMRS в PUSCH, запланированном PDCCH, UE 114 определяет соответствующую последовательность ZC из системной информации или из конфигурации посредством сигнализации более высокого уровня и определяет CS и OCC из соответствующего поля индекса CS и OCC, включенного в формат DCI, планирующий передачу PUSCH.
(см. также REF 1). Множественные последовательности ZC можно задавать на основе единичной базовой последовательности с использованием разных значений . Передача DMRS в двух или более символах TTI, как на фиг. 1, также может модулироваться ортогональным покрывающим кодом (OCC). Для передачи DMRS в PUSCH, запланированном PDCCH, UE 114 определяет соответствующую последовательность ZC из системной информации или из конфигурации посредством сигнализации более высокого уровня и определяет CS и OCC из соответствующего поля индекса CS и OCC, включенного в формат DCI, планирующий передачу PUSCH.
Фиг. 7 демонстрирует пример структуры передатчика для последовательности ZC, которую можно использовать в качестве DMRS или в качестве SRS, согласно этому раскрытию. Вариант осуществления передатчика 700 показан на фиг. 7 исключительно для иллюстрации. Другие варианты осуществления можно использовать, не выходя за рамки объема настоящего раскрытия. В некоторых вариантах осуществления передатчик 700 располагается на UE 114.
Как показано на фиг. 7, блок 720 отображения отображает последовательность ZC длиной  710 в RE BW передачи, поскольку они указаны блоком 730 выбора RE. Отображение может отображаться в последовательные RE для DMRS или в перемежающиеся RE для SRS, тем самым создавая гребенчатый спектр (см. также REF 1). Затем блок 740 IFFT осуществляет IFFT, блок 750 CS применяет CS к выходному сигналу, фильтр 760 фильтрует результирующий сигнал, усилитель 770 мощности применяет мощность передачи, и RS передается 780.
710 в RE BW передачи, поскольку они указаны блоком 730 выбора RE. Отображение может отображаться в последовательные RE для DMRS или в перемежающиеся RE для SRS, тем самым создавая гребенчатый спектр (см. также REF 1). Затем блок 740 IFFT осуществляет IFFT, блок 750 CS применяет CS к выходному сигналу, фильтр 760 фильтрует результирующий сигнал, усилитель 770 мощности применяет мощность передачи, и RS передается 780.
Мощность передачи PUSCH определяется таким образом, что соответствующий сигнал принимается на eNB 102 с желаемым SINR при управлении соответствующей помехой, создаваемой в соседних сотах, тем самым достигая целевой надежности приема и гарантируя правильную работу сети. Управление мощностью (PC) UL включает в себя управление мощностью без обратной связи (OLPC) с параметрами, зависящими от соты и зависящими от UE, и корректировки управления мощностью с обратной связью (CLPC), обеспечиваемые eNB 102 через команды управления мощностью передачи (TPC). Если передача PUSCH запланирована PDCCH, команда TPC включается в соответствующий формат DCI. Команды TPC также могут обеспечиваться отдельным PDCCH, переносящим формат DCI 3 или формат DCI 3A, совместно именуемые форматом DCI 3/3A, обеспечивая команды TPC группе UE. Формат DCI включает в себя биты циклического контроля по избыточности (CRC), и UE 114 идентифицирует тип формата DCI из соответствующего временного идентификатора радиосети (RNTI), используемого для скремблирования битов CRC. Для формата DCI 3/3A, RNTI является TPC-RNTI, сконфигурированный UE 114 посредством сигнализации более высокого уровня. Для формата DCI, планирующего передачу PUSCH от UE 114 или передачу PDSCH на UE 114, RNTI является RNTI соты (C-RNTI). Существуют также дополнительные типы RNTI (см. также REF 2).
UE 114 могут выводить мощность передачи PUSCH  в децибелах на милливатт (дБмВт), в соте
в децибелах на милливатт (дБмВт), в соте  в течение TTI
в течение TTI  согласно уравнению 2. Для простоты предполагается, что UE не передает оба PUSCH и PUCCH в одном и том же TTI (см. также REF 3).
согласно уравнению 2. Для простоты предполагается, что UE не передает оба PUSCH и PUCCH в одном и том же TTI (см. также REF 3).
<уравнение 2>

где  – максимальная мощность передачи UE, сконфигурированная на UE 114 посредством сигнализации более высокого уровня,
– максимальная мощность передачи UE, сконфигурированная на UE 114 посредством сигнализации более высокого уровня,  – BW передачи PUSCH в RB,
– BW передачи PUSCH в RB,  управляет средним SINR приема на eNB 102 и равна сумме компонента, зависящего от соты,
управляет средним SINR приема на eNB 102 и равна сумме компонента, зависящего от соты,  , и компонента, зависящего от UE,
, и компонента, зависящего от UE,  , обеспеченных на UE 114 посредством сигнализации более высокого уровня. Для планируемого на полупостоянной основе (SPS) PUSCH, j=0. Для динамически планируемого PUSCH, j=1.
, обеспеченных на UE 114 посредством сигнализации более высокого уровня. Для планируемого на полупостоянной основе (SPS) PUSCH, j=0. Для динамически планируемого PUSCH, j=1.  – оценка потерь на трассе (PL), вычисленная на UE 114. Для j=0 или j=1,
– оценка потерь на трассе (PL), вычисленная на UE 114. Для j=0 или j=1,  конфигурируется на UE 114 посредством сигнализации более высокого уровня. Дробное PC UL получается для
конфигурируется на UE 114 посредством сигнализации более высокого уровня. Дробное PC UL получается для  , поскольку PL не полностью скомпилированы.
, поскольку PL не полностью скомпилированы.  либо равно 0, либо определяется спектральной эффективностью передачи PUSCH. Кроме того, детали не являются предметом настоящего изобретения и опущены. Наконец,
либо равно 0, либо определяется спектральной эффективностью передачи PUSCH. Кроме того, детали не являются предметом настоящего изобретения и опущены. Наконец,  , если используется накопительное CLPC, и
, если используется накопительное CLPC, и  , если используется абсолютное CLPC, где
, если используется абсолютное CLPC, где  – команда TPC, включенная в формат DCI, планирующий PUSCH, или включенная в формат DCI 3/3A.
– команда TPC, включенная в формат DCI, планирующий PUSCH, или включенная в формат DCI 3/3A.  получается из временной шкалы между TTI передачи PDCCH, планирующей PUSCH, и TTI соответствующей передачи PUSCH.
получается из временной шкалы между TTI передачи PDCCH, планирующей PUSCH, и TTI соответствующей передачи PUSCH.
Мощность SRS  в соте в течение TTI согласуется с мощностью передачи PUSCH согласно уравнению 3 (см. также REF 3)
в соте в течение TTI согласуется с мощностью передачи PUSCH согласно уравнению 3 (см. также REF 3)
<уравнение 3>

где  – 4-битовый параметр, сконфигурированный на UE 114 посредством сигнализации более высокого уровня, с m=0 для P-SRS и m=1 для A-SRS, и
– 4-битовый параметр, сконфигурированный на UE 114 посредством сигнализации более высокого уровня, с m=0 для P-SRS и m=1 для A-SRS, и  – BW передачи SRS, выраженная в количестве RB.
– BW передачи SRS, выраженная в количестве RB.
Мощность передачи PUCCH подчиняется практически тем же принципам, что и мощность передачи PUSCH или передачи SRS (см. также REF 3), но, поскольку это не имеет отношения к этому раскрытию, дополнительное рассмотрение для краткости опущено.
В системе связи TDD направление связи в некоторых TTI находится в DL, и направление связи в некоторых других TTI находится в UL. В Таблице 1 указаны конфигурации UL-DL в течение периода 10 TTI (TTI, или подкадр (SF), имеет длительность 1 миллисекунду (мс)), что также именуется периодом кадра. "D" обозначает TTI DL, "U" обозначает TTI UL, и "S" обозначает особый TTI, который включает в себя поле передач DL и именуется DwPTS, защитный период (GP) и поле передачи UL, именуемое UpPTS. Существуют несколько комбинаций для длительности каждого поля в особом TTI, при условии, что полная длительность равна одному TTI.
Конфигурации UL-DL для TDD в таблице 1 обеспечивают 40% и 90% TTI DL на кадр в качестве TTI DL (и оставшиеся в качестве TTI UL). Несмотря на эту гибкость, полустатическая конфигурация UL-DL для TDD, которая может обновляться каждые 640 мс или менее часто посредством сигнализации блока системной информации (SIB) или, в случае агрегации несущих DL и вторичной соты посредством сигнализации RRC (см. также REF3 и REF 4), может не в точности совпадать с условиями кратковременного трафика данных. В оставшейся части этого раскрытия такая конфигурация UL-DL для TDD будет именоваться традиционной (или неадаптированной) конфигурацией UL-DL для TDD и предполагается подлежащей использованию традиционными (или унаследованными) UE в соте. По этой причине период ускоренной адаптации конфигурации UL-DL для TDD может повышать пропускную способность системы, в частности, для малого или умеренного количества подключенных UE в соте. Например, когда трафик DL больше, чем трафик UL, традиционная конфигурация UL-DL для TDD может адаптироваться каждые 10, 20, 40 или 80 мс, чтобы включать в себя больше TTI DL. Сигнализация для ускоренной адаптации конфигурации UL-DL для TDD в принципе может обеспечиваться несколькими механизмами, включающими в себя сигнализацию формата DCI в PDCCH.
Рабочее ограничение в адаптации конфигурации UL-DL для TDD способами, отличными от традиционных, состоит в возможности существования UE, которые не могут знать о такой адаптации. Такие UE именуются традиционными UE. Поскольку традиционные UE осуществляют измерения в TTI DL с использованием соответствующего CRS, такие TTI DL не могут меняться на TTI UL или на особые TTI посредством ускоренной адаптации конфигурации UL-DL для TDD. Однако TTI UL может меняться на TTI DL, не затрагивая традиционные UE, поскольку eNB 102 может гарантировать, что такие UE не передают никаких сигналов в таких TTI UL. Кроме того, может существовать TTI UL, общий для всех конфигураций UL-DL для TDD, чтобы eNB 102 мог выбирать этот TTI UL только как TTI UL. В некоторых реализациях, включающих в себя все конфигурации UL-DL для TDD в таблице 1, этот TTI UL является TTI #2.
TTI DL является фиксированным, если в традиционной конфигурации UL-DL для TDD присутствует TTI DL. Особый TTI может переключаться только в TTI DL. В отношении описаний этого раскрытия, единственным фиксированным TTI UL является TTI #2. В общем случае, TTI UL конфигурации UL-DL для TDD, которая сконфигурирована eNB 102 на UE 114, и которую UE может использоваться для передач сигнала HARQ-ACK, являются фиксированными TTI UL. TTI именуется гибким TTI DL, если в традиционной конфигурации UL-DL для TDD существует TTI UL, который адаптируется к TTI DL. TTI именуется гибким TTI UL, если в традиционной конфигурации UL-DL для TDD существует TTI UL, который, хотя и может адаптироваться к TTI DL в адаптированной конфигурации UL-DL для TDD, остается TTI UL.
С учетом вышесказанного, таблица 2 указывает максимальное количество гибких TTI (обозначенных 'F') для каждой конфигурации UL-DL для TDD в таблице 1. Очевидно, поскольку TTI DL в традиционной конфигурации UL-DL для TDD не могут меняться на TTI UL, не все конфигурации UL-DL для TDD могут использоваться для адаптации. Например, если конфигурация UL-DL для TDD 2 является традиционной, адаптация возможна только для конфигурации UL-DL для TDD 5. Кроме того, использование сконфигурированной конфигурации UL-DL для TDD для UE 114 для вывода TTI UL для передач HARQ-ACK дополнительно ограничивает конфигурацию UL-DL для TDD, которую можно использовать для адаптации, поскольку такие TTI UL являются фиксированными TTI UL. Таким образом, указание адаптации для конфигурации UL-DL для TDD UE 114 может рассматривать как недействительное, например, при переключении TTI DL в традиционной конфигурации UL-DL для TDD на TTI UL. Недействительные указания могут быть обусловлены, например, тем, что UE 114 неверно определяет формат DCI, переносящий указание для адаптированной конфигурации UL-DL для TDD.
Мощность передачи UL в гибком TTI UL может отличаться от мощности передачи UL в фиксированном TTI UL, поскольку помеха в первом может быть обусловлена комбинацией передач DL или передач UL в соседних сотах, тогда как помеха в последнем всегда обусловлена передачами UL в соседних сотах. Можно рассмотреть Два отдельных процесса PC UL; один для использования в фиксированных TTI, например TTI #2, и другой для использования в гибких TTI. Каждый процесс PC UL может иметь процессы отдельные OLPC в связи с соответствующими значениями  и
и  или может иметь отдельные процессы CLPC в связи с отдельным применением команд TPC
или может иметь отдельные процессы CLPC в связи с отдельным применением команд TPC  . Однако традиционного подхода наличия единственного процесса PC UL для гибких TTI может быть достаточно, поскольку разные гибкие TTI могут испытывать разные характеристики помехи. Кроме того, наличия одного и того же процесса PC UL для всех UE в соте также может быть достаточно, поскольку разные UE могут испытывать разную помеху.
. Однако традиционного подхода наличия единственного процесса PC UL для гибких TTI может быть достаточно, поскольку разные гибкие TTI могут испытывать разные характеристики помехи. Кроме того, наличия одного и того же процесса PC UL для всех UE в соте также может быть достаточно, поскольку разные UE могут испытывать разную помеху.
Фиг. 8 демонстрирует пример разных характеристик помехи в разных гибких TTI UL согласно этому раскрытию. Варианты осуществления характеристик помехи, показанных в разных гибких TTI, показаны на фиг. 13 исключительно для иллюстрации. Другие варианты осуществления можно использовать, не выходя за рамки объема настоящего раскрытия.
Как показано на фиг. 8, конфигурация UL-DL для TDD 1 используется в опорной соте #1 810, конфигурация UL-DL для TDD 2 используется в помеховой соте #2 820, и конфигурация UL-DL для TDD 3 используется в помеховой соте #3 830. В фиксированном TTI #2 в соте #1 840, соте #2 850 и соте #3 860, помеха, испытываемая передачами UL, статистически одинакова, и может применяться традиционный процесс PC UL. В гибком TTI #3 в соте #1 842, помеха, испытываемая передачами UL, отличается от помехи в фиксированном TTI #2, поскольку гибкий TTI #3 используется для передач DL в соте #2 852 и для передач UL в соте #3 862. Таким образом, UE 114 в соте #1, которая располагается к соте #2, может испытывать совершенно другую помеху в TTI #3, чем в TTI #2. В гибком TTI #7 в соте #1 844, помеха, испытываемая передачами UL, отличается от помехи в фиксированном TTI #2 или гибком TTI #3, поскольку гибкий TTI #7 является TTI UL в соте #2 854, тогда как в соте #3 864 он является TTI DL. Таким образом, передачи UL от UE 114 в соте #1, которая располагается к соте #3, может испытывать совершенно другую помеху в TTI #7, чем в TTI #2 или в TTI #3. Наконец, в гибком TTI #8 в соте #1 846, помеха, испытываемая передачами UL, может отличаться от в фиксированном TTI #2, или в гибком TTI #3, или в гибком TTI #7, поскольку гибкий TTI #8 является TTI DL в обеих соте #2 856 и соте #3 866. Таким образом, не только существует различие в помехе между двумя типами TTI (фиксированными и гибкими), но и существует различие в помехе в разных гибких TTI.
Вследствие увеличенных различий в помехе в гибком TTI UL относительно фиксированного TTI UL, надежность приема TB данных, передаваемых в PUSCH в гибком TTI UL, может быть хуже, чем надежность приема одного из TB данных, передаваемых в PUSCH в фиксированном TTI UL. В общем случае, надежность приема TB данных в PUSCH может снижаться, когда помеха в соответствующем TTI в TTI DL, чем когда он является TTI UL. Это не является серьезной проблемой для передач TB данных, поскольку они могут пользоваться повторными передачами HARQ, но является серьезной проблемой для передач UCI в PUSCH, которым предъявляются более строгие требования к надежности и которые не могут пользоваться повторными передачами HARQ.
Варианты осуществления этого раскрытия обеспечивают механизмы для связывания первого процесса PC UL и второго процесса PC UL с первым набором TTI и со вторым набором TTI в кадре, соответственно, в зависимости от UE, где гибкий TTI UL, который является TTI UL, отличным от TTI #2, может быть связан либо с первым процессом PC UL, либо со вторым процессом PC UL. Варианты осуществления этого раскрытия обеспечивают команды TPC форматом DCI 3/3A для передач сигнала от UE 114 в первом наборе TTI и во втором наборе TTI. Варианты осуществления этого раскрытия также обеспечивают механизмы для поддержки процесса PC UL во втором наборе TTI после адаптации конфигурации UL-DL для TDD. Кроме того, варианты осуществления этого раскрытия обеспечивают механизмы для обеспечения надежности приема для TB данных или CSI в PUSCH, который UE 114 передает в гибком TTI UL, которая сравнима с надежностью приема для TB данных или CSI в PUSCH, который UE 114 передает в фиксированном TTI UL. Дополнительно, вариант осуществления этого раскрытия обеспечивают механизмы для передачи и приема повторной передачи транспортного блока данных в TTI, связанном с первым (или вторым) процессом PC UL для начальной передачи транспортного блока данных в TTI, связанном с втором (или первым) процессом PC UL.
АДАПТАЦИЯ ПАРАМЕТРОВ OLPC И CLPC В ГИБКИХ TTI UL
В некоторых вариантах осуществления, поскольку значения параметров OLPC, например или , или параметров CLPC, например  , которые UE 114 использует для передач сигнала UL, могут зависеть от местоположения UE 114 в соте, адаптация таких значений может зависеть не только от того, является ли TTI UL фиксированным или гибким, но и от конкретного гибкого TTI UL. Тот же процесс PC UL, что и для фиксированного TTI UL, например TTI #2 в таблице 2, может использоваться в первом гибком TTI UL, тогда как другой процесс PC UL, чем для фиксированного TTI UL, может использоваться во втором гибком TTI UL. Кроме того, адаптация для значений параметров OLPC или CLPC для каждого процесса PC UL зависит от UE, поскольку помеха, испытываемая передачей сигнала UL, может различаться для разных UE в одном и том же гибком TTI UL. для передач сигнала UL в одном и том же гибком TTI UL, первое UE 114 может использовать тот же процесс PC UL, что и в фиксированном TTI UL, тогда как второе UE 115 может использовать другой процесс PC UL, чем в фиксированном TTI UL.
, которые UE 114 использует для передач сигнала UL, могут зависеть от местоположения UE 114 в соте, адаптация таких значений может зависеть не только от того, является ли TTI UL фиксированным или гибким, но и от конкретного гибкого TTI UL. Тот же процесс PC UL, что и для фиксированного TTI UL, например TTI #2 в таблице 2, может использоваться в первом гибком TTI UL, тогда как другой процесс PC UL, чем для фиксированного TTI UL, может использоваться во втором гибком TTI UL. Кроме того, адаптация для значений параметров OLPC или CLPC для каждого процесса PC UL зависит от UE, поскольку помеха, испытываемая передачей сигнала UL, может различаться для разных UE в одном и том же гибком TTI UL. для передач сигнала UL в одном и том же гибком TTI UL, первое UE 114 может использовать тот же процесс PC UL, что и в фиксированном TTI UL, тогда как второе UE 115 может использовать другой процесс PC UL, чем в фиксированном TTI UL.
Поскольку UE 114 обычно испытывает преобладающую помеху от одной соседней соты, процесс PC UL в гибком TTI UL может быть таким же, как для фиксированного TTI UL, если гибкий TTI в соте преобладающей помехи также является TTI UL. Напротив, процесс PC UL в гибком TTI UL может отличаться от для фиксированного TTI UL, если гибкий TTI UL в соте преобладающей помехи является TTI DL. Таким образом, процесс PC UL для передач PUSCH или A-SRS в гибком TTI UL может указываться UE 114 таким же, как для фиксированного TTI UL (TTI #2 для конфигураций UL-DL для TDD в таблице 2) или другим, чем в фиксированном TTI UL. Таким образом, два набора TTI UL определяются согласно соответствующему процессу PC UL для передач PUSCH или A-SRS; первый набор, который включает в себя TTI #2, где используется первый, традиционный, процесс PC UL, и второй набор, где используется второй процесс PC UL. Каждый процесс PC UL может быть связан с разными значениями  или для OLPC или с разными циклами CLPC , которые могут быть заранее сконфигурированы на UE 114 посредством сигнализации более высокого уровня и не нуждаются в адаптации с той же скоростью, что и адаптация конфигурации UL-DL для TDD. Для передачи A-SRS,
или для OLPC или с разными циклами CLPC , которые могут быть заранее сконфигурированы на UE 114 посредством сигнализации более высокого уровня и не нуждаются в адаптации с той же скоростью, что и адаптация конфигурации UL-DL для TDD. Для передачи A-SRS,  также может быть сконфигурировано отдельно для каждого процесса PC UL для соответствующего OLPC. Указание UE 114 использовать первый процесс PC UL или второй процесс PC UL в гибком TTI UL конфигурируется посредством сигнализации RRC, и, по возможности, конфигурация RRC может дополняться динамическим указанием, обеспеченным форматом DCI в PDCCH или EPDCCH, который планирует передачи PUSCH или A-SRS.
также может быть сконфигурировано отдельно для каждого процесса PC UL для соответствующего OLPC. Указание UE 114 использовать первый процесс PC UL или второй процесс PC UL в гибком TTI UL конфигурируется посредством сигнализации RRC, и, по возможности, конфигурация RRC может дополняться динамическим указанием, обеспеченным форматом DCI в PDCCH или EPDCCH, который планирует передачи PUSCH или A-SRS.
В первом подходе к динамическому указанию указание UE 114 использовать первый набор значений или второй набор значений для параметров OLPC или CLPC для передачи сигнала UL в TTI UL (отличном от TTI #2) обеспечивается путем включения дополнительного поля конфигурации управления мощностью (PCC), имеющего один двоичный элемент, в форматах DCI, планирующих передачи PUSCH. Для планирования PUSCH в фиксированном TTI UL #2, где предполагается, что всегда используется первый набор значений для параметров OLPC или CLPC, поле PCC можно задать равным значению, принятому по умолчанию, например '0'. Исключение может возникать, когда передача A-SRS также инициируется в гибком TTI UL, и в этом случае поле PCC можно интерпретировать как указывающее набор значений для параметров OLPC или CLPC, применимых к передаче A-SRS в гибком TTI UL.
Фиг. 9 демонстрирует пример использования поля PCC в формате DCI для связывания соответствующей передачи PUSCH с первым процессом PC UL или со вторым процессом PC UL согласно этому раскрытию. Хотя блок-схема операций изображает ряд последовательных этапов, если явно не указано обратное, из этой последовательности не следуют делать вывод о конкретном порядке осуществления, осуществлении этапов или их участков последовательно, а не одновременно, или с перекрыванием, или осуществлении указанных этапов исключительно в отсутствие переходных или промежуточных этапов. Процесс, представленный в описанном примере, реализуется цепью передатчика, например, на мобильной станции.
Как показано на фиг. 9, UE 114 обнаруживает PDCCH, переносящий формат DCI, планирующий PUSCH в TTI UL, в операции 910. UE 114 проверяет значение 1-битового поля PCC, включенного в формат DCI, в операции 920. Если это значение является двоичным '0', UE 114 передает PUSCH с мощностью передачи, определенной согласно первому набору значений для параметров OLPC или CLPC, в операции 930 (первый процесс PC UL). Если это значение является двоичным '1', UE 114 передает PUSCH с мощностью передачи, определенной согласно второму набору значений для параметров OLPC или CLPC, в операции 940 (второй процесс PC UL).
Во втором подходе к динамическому указанию указание UE 114 использовать первый набор значений или второй набор значений для параметров OLPC или CLPC для передачи сигнала UL в TTI UL (отличном от TTI #2) осуществляется путем повторной интерпретации 2-битового поля TPC в соответствующем формате DCI, планирующем передачу PUSCH или A-SRS. Традиционная интерпретация 2-битового поля TPC состоит в том, что каждое значение указывает регулировку мощности передачи в децибелах (дБ), где '00', '01', '10' и '11' указывают, соответственно, -1 дБ, 0 дБ, 1 дБ и 3 дБ (см. также REF 3). для передач PUSCH или A-SRS в TTI UL, отличном от TTI #2, один бит поля TPC, например первый бит, может использоваться для указания регулировки мощности передачи, и другой бит поля TPC может использоваться для указания использования первого процесса PC UL или второго процесса PC UL. Например, значения регулировки мощности передачи могут быть -1 дБ или 1 дБ или могут зависеть от того, указан ли первый процесс PC UL или второй процесс PC UL.
Фиг. 10 демонстрирует пример использования поля TPC в формате DCI, планирующем PUSCH в зависимости от того, может ли он указывать использование первого процесса PC UL или второго процесса PC UL, согласно этому раскрытию. Хотя блок-схема операций изображает ряд последовательных этапов, если явно не указано обратное, из этой последовательности не следуют делать вывод о конкретном порядке осуществления, осуществлении этапов или их участков последовательно, а не одновременно, или с перекрыванием, или осуществлении указанных этапов исключительно в отсутствие переходных или промежуточных этапов. Процесс, представленный в описанном примере, реализуется цепью передатчика, например, на мобильной станции.
Как показано на фиг. 10, UE 114 обнаруживает PDCCH, переносящий формат DCI, включающий в себя 2-битовое поле TPC и планирующий передачу PUSCH, в операции 1010. Затем UE 114 проверяет, является ли соответствующий TTI фиксированным TTI UL #2, в операции 1020. Если это TTI #2, UE 114 передает PUSCH с использованием первого набора значений для параметров OLPC или CLPC, соответствующего первому процессу PC UL, и использует отображение обоих битов поля TPC для определения значения для регулировки мощности передачи, в операции 1030. Если TTI не является TTI #2, UE 114 определяет, использовать ли первый набор значений или второй набор значений для параметров OLPC или CLPC, соответствующий первому или второму процессу PC UL, соответственно, в зависимости от значения второго бита 2-битового поля TPC в операции 1040. Например, если значение второго бита является двоичным '0', UE 114 использует первый процесс PC UL; в противном случае, если значение второго бита является двоичным '1', UE 114 использует второй процесс PC UL. Наконец, UE 114 дополнительно определяет регулировку мощности передачи с использованием отображения первого бита поля TPC 1050.
В третьем подходе к динамическому указанию указание UE 114 использовать первый набор значений или второй набор значений для параметров OLPC или CLPC для передачи сигнала UL в TTI UL (отличном от TTI #2) осуществляется путем повторной интерпретации состояний другого поля, включенного в формат DCI, планирующий PUSCH для обеспечения упомянутого указания. Например, поскольку количество UE с активным соединением с eNB 102, которые выполнены с возможностью работать с адаптированной конфигурацией UL-DL для TDD, обычно невелико, 3-битовое поле индекса CS и OCC в формате DCI, используемом для обеспечения пространственного мультиплексирования передач PUSCH между UE (также см. REF 2), обычно является избыточным. Затем для передачи PUSCH в TTI, отличном от TTI #2, 1 бит из 3 битов CS и поля OCC может использоваться для обеспечения указания для первого процесса PC UL или для второго процесса PC UL. Такой подход можно распространить на другие поля формата DCI, соответственно, ограничивая их объем. Поскольку UE 114 работает примерно так же, как во втором подходе, дополнительная иллюстрация для краткости опущена.
Для любого подхода, опирающегося на вспомогательное динамическое указание первого процесса PC UL или второго процесса PC UL, если передача PUSCH переносит повторную передачу для TB данных, она происходит в TTI, отличном от TTI #2, и инициируется сигналом HARQ-ACK DL (NACK для предыдущей передачи одного и того же TB данных, см. также REF 3), UE 114 нужно неявно определять, использовать ли первый процесс PC UL или второй процесс PC UL. Если UE 114 запланировало посредством PDCCH или EPDCCH передачу PUSCH в одном и том же TTI в предыдущем кадре для одной и той же конфигурации UL-DL для TDD, UE 114 поддерживает один и тот же (первый или второй) процесс PC UL для передачи PUSCH, переносящий повторную передачу TB данных. Если UE 114 не запланировало посредством PDCCH или EPDCCH никакой передачи PUSCH в одном и том же TTI в предыдущем кадре для одной и той же конфигурации UL-DL для TDD, неявное правило можно применять для UE 114 для определения, использовать ли первый процесс PC UL или второй процесс PC UL. Например, если для начальной передачи одного и того же TB данных, поле индекса CS и OCC, включающее в себя 3 бита в соответствующем формате DCI, указывает одно из четырех меньших значений, UE 114 может использовать первое PC UL для повторной передачи TB данных; в противном случае, если поле индекса CS и OCC указывает одно из четырех более высоких значений, UE 114 может использовать второе PC UL для повторной передачи TB данных.
Фиг. 11 демонстрирует пример процесса для UE для определения, использовать ли первый процесс PC UL или второй процесс PC UL для неадаптивной повторной передачи TB данных в PUSCH согласно этому раскрытию. Хотя блок-схема операций изображает ряд последовательных этапов, если явно не указано обратное, из этой последовательности не следуют делать вывод о конкретном порядке осуществления, осуществлении этапов или их участков последовательно, а не одновременно, или с перекрыванием, или осуществлении указанных этапов исключительно в отсутствие переходных или промежуточных этапов. Процесс, представленный в описанном примере, реализуется цепью передатчика, например, на мобильной станции.
Как показано на фиг. 11, UE 114 обнаруживает сигнал HARQ-ACK, переносящий NACK для начальной передачи TB данных в операции 1110. UE 114 передает PUSCH, переносящий повторную передачу TB данных в TTI (отличном от TTI #2) согласно временной шкале HARQ в зависимости от индекса TTI обнаружения сигнала HARQ-ACK для сконфигурированной конфигурации UL-DL для TDD, в операции 1120. UE 114 определяет, использовать ли первый процесс PC UL или второй процесс PC UL для передачи PUSCH на основании значения поля индекса CS и OCC, включенного в формат DCI, планирующий начальную передачу PUSCH для одного и того же TB данных в операции 1130. Если значение поля индекса CS и OCC находится в нижней половине значений, UE 114 использует первый процесс PC UL в операции 1140. Если значение поля индекса CS и OCC находится в верхней половине значений, UE 114 использует второй процесс PC UL в операции 1150.
TTI для передачи A-SRS, инициированной форматом DCI, который UE 114 обнаруживает в TTI DL n, определяется как первый TTI UL, удовлетворяющий условию n+k, k≥4 и  , где
, где  – индекс TTI в кадре
– индекс TTI в кадре  ,
,  – смещение TTI A-SRS,
– смещение TTI A-SRS,  – периодичность A-SRS (см. также REF 3). Затем A-SRS может передаваться либо в фиксированном TTI UL (например, TTI #2), либо в гибком TTI UL. Если передача A-SRS инициируется PDCCH, планирующим PDSCH, и A-SRS подлежит передаче в гибком TTI UL, снова можно использовать первые два подхода. В частности, форматы DCI, планирующие PDSCH и поддерживающие инициирование A-SRS, могут включать в себя либо поле PCC, применимое к передачам A-SRS, таким же образом, как поле PCC в форматах DCI, планирующих PUSCH, для указания, следует ли использовать первый или второй процесс UL, или поле TPC может делиться на две части (только при инициировании A-SRS) причем первая часть указывает команду TPC, и вторая часть действует как PCC. Альтернативно, для передачи A-SRS, инициированной PDCCH, планирующим PDSCH, второй процесс PC UL может использоваться по умолчанию, поскольку такое инициирование, в основном, полезно при наличии преобладающей помехи UL. Если A-SRS подлежит передаче в фиксированном TTI UL, например TTI #2, применяется традиционный процесс PC UL (первый процесс PC UL).
– периодичность A-SRS (см. также REF 3). Затем A-SRS может передаваться либо в фиксированном TTI UL (например, TTI #2), либо в гибком TTI UL. Если передача A-SRS инициируется PDCCH, планирующим PDSCH, и A-SRS подлежит передаче в гибком TTI UL, снова можно использовать первые два подхода. В частности, форматы DCI, планирующие PDSCH и поддерживающие инициирование A-SRS, могут включать в себя либо поле PCC, применимое к передачам A-SRS, таким же образом, как поле PCC в форматах DCI, планирующих PUSCH, для указания, следует ли использовать первый или второй процесс UL, или поле TPC может делиться на две части (только при инициировании A-SRS) причем первая часть указывает команду TPC, и вторая часть действует как PCC. Альтернативно, для передачи A-SRS, инициированной PDCCH, планирующим PDSCH, второй процесс PC UL может использоваться по умолчанию, поскольку такое инициирование, в основном, полезно при наличии преобладающей помехи UL. Если A-SRS подлежит передаче в фиксированном TTI UL, например TTI #2, применяется традиционный процесс PC UL (первый процесс PC UL).
Хотя два разных процесса PC UL может применяться для передач PUSCH или A-SRS, в этом раскрытии предусмотрено, что передачи PUCCH могут быть заключены в фиксированных TTI и, таким образом, достаточно единичного (первого) процесса PC UL. Одна причина такого ограничения состоит в том, что для защиты передач PUCCH от помехи DL, в отличие от передач данных в PUSCH, передача информации управления в PUCCH обычно требует более высокой надежности приема и не может пользоваться повторными передачами HARQ. Другая причина состоит в том, что использование второго процесса PC UL и применение более высокой мощности передачи в TTI UL, где унаследованные UE передают информацию управления в PUCCH (или даже информацию данных в PUSCH) могут создавать нежелательные внутриполосные излучения и значительно снижают надежность приема информации, передаваемой традиционными UE, которые используют первый процесс PC UL. Следствие избежания внутриполосных излучений и приема сигналов с использованием второго процесса PC UL со значительно более высокой мощностью, чем сигналы с использованием первого процесса PC UL в одном и том же TTI, состоит в том, что второй процесс PC UL может не использоваться в TTI, где традиционные UE передают сигналы, даже если UE 114 испытывает в основном, помеху DL в таких TTI. Таким образом, независимо от TTI UL, один и тот же процесс PC UL всегда используется для передач PUCCH как традиционными UE, так и UE, сконфигурированными для работы с адаптированной конфигурацией UL-DL для TDD.
Передачи PUCCH также могут осуществляться в гибком TTI UL, который является TTI UL, отличным от TTI #2, который, тем не менее, не может адаптироваться к TTI DL, на основании другой конфигурации UL-DL для TDD, которая сконфигурирована на UE 114 для передач HARQ-ACK в ответ на обнаружения PDCCH. Например, если конфигурация UL-DL 2 сконфигурирована на UE 114 для передач HARQ-ACK, TTI #7 всегда является TTI UL, хотя он может быть гибким TTI UL, если конфигурация UL-DL 5 сконфигурирована на UE 114 для передач HARQ-ACK (только TTI #2 всегда является TTI UL независимо от конфигурации UL-DL для TDD, которая сконфигурирована на UE 114 для передач HARQ-ACK). Тогда, поскольку в этом раскрытии предусмотрено, что первый процесс PC UL всегда используется для передач PUCCH, и TTI #7 может использоваться для передач сигнала HARQ-ACK от UE 114 в PUCCH, первый процесс PC UL также используется для TTI #7. В общем случае, первый процесс PC UL используется для всей сигнализации UL (PUSCH, SRS, PUCCH) в каждом TTI, помимо TTI #2, где UE 114 может передавать PUCCH.
Для передач P-SRS, поскольку тип TTI (фиксированный или гибкий) является предварительно определенной конфигурацией, используется ли первый или второй процесс PC UL, также предварительно определяется конфигурацией. Для передачи SPS PUSCH, это раскрытие дополнительно предусматривает, что он всегда может находиться в фиксированном TTI и использовать первый процесс PC UL, поскольку конфигурация UL-DL для TDD может адаптироваться быстрее, чем конфигурация TTI UL, где передается SPS PUSCH.
Для передач PUSCH связь TTI UL с первым процессом PC UL или вторым процессом PC UL также может опираться исключительно на конфигурацию (сигнализацию RRC) без вспомогательной динамической сигнализации. Например, с учетом помехи на соседнем канале от соты, которая не адаптирует свою конфигурацию UL-DL для TDD быстрее, чем традиционная, использование первого процесса PC UL или второго процесса PC UL в TTI может сигнализироваться на UE 114 полустатически посредством сигнализации RRC. Такой же подход можно применять для повторной передачи PUSCH, инициированной сигналом HARQ-ACK со значением NACK, поскольку не существует соответствующего формата DCI для динамического указания процесса PC UL для UE для использования в TTI повторной передачи PUSCH, или для A-SRS, сконфигурированного происходить в гибком TTI UL и инициированного путем адаптации конфигурации UL-DL для TDD.
Рассмотрим кадр из 10 TTI и предположим, что TTI #2 является фиксированным TTI UL, тогда как TTI #0, TTI #1, TTI #5 являются либо фиксированными TTI DL, либо фиксированными особыми TTI (имеющими одну и ту же конфигурацию длины DwPTS и длины UpPTS) во всех конфигурациях UL-DL для TDD, сигнализация RRC может быть битовой картой, которая включает в себя 6 битов (для гибких TTI #3, TTI #4, TTI #6, TTI #7, TTI #8 и TTI #9), причем для соответствующего TTI, битовое значение '0' может указывать использование первого процесса PC UL, тогда как битовое значение '1' может указывать использование второго процесса PC UL. Причина возможной связи второго процесса PC UL с TTI #6 состоит в том, что, если это особый TTI, он может поддерживать передачи UL в UpPTS, например передачи SRS, и UE 114 может испытывать либо помеху UL, либо помеху DL (если это TTI DL в конфигурации UL-DL для TDD, используемой в соседней соте). Битовая карта также может быть задана с размером, равным количеству гибких TTI в традиционной конфигурации UL-DL для TDD и в таком случае он может включать в себя менее 4 битов. Связи посредством сигнализации RRC TTI UL в кадре в первом наборе TTI, связанном с первым процессом PC UL и во втором наборе TTI, связанном со вторым процессом PC UL, достаточно в случае, когда помеховая сота использует традиционную адаптацию своей конфигурации UL-DL для TDD.
Изобретение дополнительно предусматривает, что использование второго процесса PC UL сконфигурировано на UE 114 посредством сигнализации RRC. Например, если сота принадлежит кластеру сот, использующих одну и ту же адаптацию конфигурации UL-DL для TDD и помеху в соте, в кластере сот, в основном, генерируется сотами в одном и том же кластере, второй процесс PC UL не требуется, поскольку передачи UL в соте испытывают помеху из других сот в одном и том же кластере.
Команды TPC в формате DCI 3/3A для использования в фиксированных TTI или гибких TTI
В некоторых вариантах осуществления команды TPC для регулировки мощности передачи PUSCH или мощности передачи SRS также обеспечиваются группе UE путем передачи формата DCI 3/3A с CRC, скремблированным TPC-RNTI. Когда отдельные процессы PC UL используются между передачами в первом наборе TTI UL и передачами во втором наборе TTI UL, необходимо идентифицировать команды TPC для каждого процесса PC UL.
В первом подходе отдельный TPC-RNTI связан с командами TPC, применимыми ко второму набору TTI UL, и сконфигурирован на UE 114 посредством сигнализации более высокого уровня, например сигнализации RRC. Таким образом, при обнаружении соответствующего PDCCH, переносящего формат DCI 3/3A, UE 114 осуществляет проверку CRC после дескремблирования CRC либо первым TPC-RNTI, соответствующим формату DCI 3/3A, с обеспечением команд TPC для первого процесса PC UL, либо вторым TPC-RNTI, соответствующим формату DCI 3/3A, с обеспечением команд TPC для второго процесса PC UL.
Фиг. 12 демонстрирует пример процесса для UE 114 для получения команд TPC для первого процесса PC UL и команд TPC для второго процесса PC UL из разных соответствующих форматов DCI 3/3A согласно этому раскрытию. Хотя блок-схема операций изображает ряд последовательных этапов, если явно не указано обратное, из этой последовательности не следуют делать вывод о конкретном порядке осуществления, осуществлении этапов или их участков последовательно, а не одновременно, или с перекрыванием, или осуществлении указанных этапов исключительно в отсутствие переходных или промежуточных этапов. Процесс, представленный в описанном примере, реализуется цепью передатчика, например, на мобильной станции.
Как показано на фиг. 12, UE 114 принимает PDCCH, потенциально переносящий формат DCI 3/3A, и дескремблирует его CRC с использованием первого TPC-RNTI и с использованием второго TPC-RNTI и осуществляет первую соответствующую проверку CRC и вторую соответствующую проверку CRC в операции 1210. Затем UE 114 проверяет результаты соответствующих первой и второй проверок CRC в операции 1220. Если ни одна из проверок CRC не дает положительного результата, UE 114 игнорирует результат декодирования PDCCH в операции 1230. Если первая проверка CRC дает положительный результат в операции 1240, то UE 114 использует команду TPC в формате DCI для первого процесса CLPC UL для регулировки мощности передачи PUSCH или SRS в операции 1250; в противном случае, UE 114 использует команду TPC в формате DCI для второго процесса CLPC UL для регулировки мощности передачи PUSCH или SRS в операции 1260.
Во втором подходе команда TPC, применимая к первому процессу PC UL, и команда TPC, применимая ко второму процессу PC UL, обеспечены в одном и том же формате DCI 3/3A. UE 114 сконфигурирован (например, посредством сигнализации RRC) первое местоположение для команды TPC, применимой к первому процессу PC UL, и неявно определяет команду TPC, применимую ко второму процессу PC UL для размещения сразу после команды TPC, применимой к первому процессу PC UL.
Фиг. 13 демонстрирует пример определения на UE команды TPC для первого процесса PC UL и команды TPC для второго процесса PC UL в одном и том же формате DCI 3/3A согласно этому раскрытию. Хотя блок-схема операций изображает ряд последовательных этапов, если явно не указано обратное, из этой последовательности не следуют делать вывод о конкретном порядке осуществления, осуществлении этапов или их участков последовательно, а не одновременно, или с перекрыванием, или осуществлении указанных этапов исключительно в отсутствие переходных или промежуточных этапов. Процесс, представленный в описанном примере, реализуется цепью передатчика, например, на мобильной станции.
Как показано на фиг. 13, UE 114 принимает PDCCH, потенциально переносящий формат DCI 3/3A, дескремблирует его CRC с использованием TPC-RNTI и осуществляет проверку CRC в операции 1310. Затем UE 114 проверяет результат проверок CRC в операции 1320. В случае отрицательного результата проверки CRC, UE 114 игнорирует результат декодирования PDCCH в операции 1330. В случае положительного результата проверки CRC, UE 114 использует первую команду TPC в формате DCI для первого процесса CLPC для регулировки мощности передачи PUSCH или SRS в операции 1340. UE также использует вторую команду TPC в формате DCI для второго процесса CLPC для регулировки мощности передачи PUSCH или SRS в операции 1350, причем местоположение второй команды TPC либо отдельно конфигурируется из местоположения первой команды TPC, либо следует сразу за местоположением первой команды TPC.
Помимо того что формат DCI 3/3A обеспечивает команду TPC для регулировки мощности передачи PUSCH или мощности передачи SRS в гибких TTI, он также может быть полезен для указания гибких TTI, для которых применима регулировка мощности передачи (поскольку не все гибкие TTI применяют один и тот же процесс PC UL). Можно применять такой же подход, как для неадаптивной повторной передачи TB данных в PUSCH.
Наконец, с учетом того что команда TPC, обеспеченная форматом DCI 3/3A для UE 114, в основном, предназначена для регулировки мощности передачи периодической сигнализации, например, SPS PUSCH, или P-SRS, или UCI, передаваемого в PUCCH (в отличие от HARQ-ACK, который является ответом на обнаружения PDCCH посредством UE 114, которые переносят форматы DCI, которые включают в себя по меньшей мере одну команду TPC), поскольку мощность передачи для непериодической сигнализации, инициированной обнаружением форматов DCI, можно регулировать на основании команды TPC, включенной в соответствующий формат DCI, можно избежать поддержки команд TPC форматом DCI 3/3A исключительно для второго процесса PC UL, и UE 114 может интерпретировать такие команды TPC как всегда применяющиеся либо только к первому процессу PC UL, либо к обоим первому процессу PC UL и второму процессу PC UL.
Регулировка процессов PC UL после адаптации конфигурации UL-DL для TDD
Этот вариант осуществления предусматривает, что после адаптации конфигурации UL-DL для TDD, помеха, испытываемая передачами PUSCH или SRS от UE 114 в гибком TTI, может изменяться в зависимости от конфигураций UL-DL для TDD, используемых в соседних сотах. Таким образом, может быть нецелесообразно продолжать использовать тот же процесс CLPC, что и в предыдущей конфигурации UL-DL для TDD для передач PUSCH или SRS в гибких TTI, если команды TPC являются накопительными.
В этом раскрытии предусмотрено, что после адаптации конфигурации UL-DL для TDD, второй процесс CLPC,  , для передач PUSCH или SRS от UE 114 во втором наборе TTI повторно инициализируется, тогда как первый процесс CLPC,
, для передач PUSCH или SRS от UE 114 во втором наборе TTI повторно инициализируется, тогда как первый процесс CLPC,  , для передач PUSCH или SRS от UE 114 в первом наборе TTI, продолжается от своего последнего значения в течение предыдущей конфигурации UL-DL для TDD. Для поддержки отслеживания изменений канала для адаптации мощности передачи PUSCH или SRS во втором наборе TTI, связанным со вторым процессом PC UL после адаптации конфигурации UL-DL для TDD, UE 114 повторно инициализирует последним значением в течение предыдущей конфигурации UL-DL для TDD. Альтернативно, до приема команды TPC, применимой к текущей конфигурации UL-DL для TDD, UE 114 может повторно инициализировать текущим значением . Кроме того, когда UE 114 сконфигурировано для работы со вторым процессом PC UL, начальное значение может быть равно существующему значению во время конфигурации. Это также можно распространить на любой случай, когда UE 114 переводит свою работу из традиционной конфигурацию UL-DL для TDD в адаптированную конфигурацию UL-DL для TDD. Например, UE 114 может инициализировать существующим значением , когда UE 114 не удается обнаружить первый формат DCI, указывающий первую адаптированную конфигурацию UL-DL для TDD на протяжении периода адаптации (в этом случае UE 114 работает с традиционной конфигурацией UL-DL для TDD с использованием первого процесса PC UL), и затем UE 114 обнаруживает второй формат DCI, указывающий вторую адаптированную конфигурацию UL-DL для TDD на протяжении периода адаптации. Альтернативно, конфигурация для использования накопительного или абсолютного TPC может быть независимой для первого процесса CLPC и второго процесса CLPC. Альтернативно, если UE 114 не работает с адаптированной конфигурацией UL-DL для TDD
, для передач PUSCH или SRS от UE 114 в первом наборе TTI, продолжается от своего последнего значения в течение предыдущей конфигурации UL-DL для TDD. Для поддержки отслеживания изменений канала для адаптации мощности передачи PUSCH или SRS во втором наборе TTI, связанным со вторым процессом PC UL после адаптации конфигурации UL-DL для TDD, UE 114 повторно инициализирует последним значением в течение предыдущей конфигурации UL-DL для TDD. Альтернативно, до приема команды TPC, применимой к текущей конфигурации UL-DL для TDD, UE 114 может повторно инициализировать текущим значением . Кроме того, когда UE 114 сконфигурировано для работы со вторым процессом PC UL, начальное значение может быть равно существующему значению во время конфигурации. Это также можно распространить на любой случай, когда UE 114 переводит свою работу из традиционной конфигурацию UL-DL для TDD в адаптированную конфигурацию UL-DL для TDD. Например, UE 114 может инициализировать существующим значением , когда UE 114 не удается обнаружить первый формат DCI, указывающий первую адаптированную конфигурацию UL-DL для TDD на протяжении периода адаптации (в этом случае UE 114 работает с традиционной конфигурацией UL-DL для TDD с использованием первого процесса PC UL), и затем UE 114 обнаруживает второй формат DCI, указывающий вторую адаптированную конфигурацию UL-DL для TDD на протяжении периода адаптации. Альтернативно, конфигурация для использования накопительного или абсолютного TPC может быть независимой для первого процесса CLPC и второго процесса CLPC. Альтернативно, если UE 114 не работает с адаптированной конфигурацией UL-DL для TDD
Фиг. 14 демонстрирует пример осуществления первого процесса CLPC и второго процесса CLPC после адаптации конфигурации UL-DL для TDD согласно этому раскрытию. Хотя блок-схема операций изображает ряд последовательных этапов, если явно не указано обратное, из этой последовательности не следуют делать вывод о конкретном порядке осуществления, осуществлении этапов или их участков последовательно, а не одновременно, или с перекрыванием, или осуществлении указанных этапов исключительно в отсутствие переходных или промежуточных этапов. Процесс, представленный в описанном примере, реализуется цепью передатчика, например, на мобильной станции.
Как показано на фиг. 14, UE 114 определяет адаптацию конфигурации UL-DL для TDD в операции 1410. UE 114 задает равным последнему значению в течение предыдущей конфигурации UL-DL для TDD (или равным текущему значению ) в операции 1420. UE 114 использует последнее значение в предыдущей конфигурации UL-DL для TDD для обновления в текущей конфигурации UL-DL для TDD в операции 1430.
Определение ресурсов UCI в фиксированных TTI и в гибких TTI
В некоторых вариантах осуществления вследствие разных характеристик помехи, которые передача PUSCH от UE 114 может испытывать между фиксированными TTI, например TTI #2, и, по меньшей мере, некоторые гибкие TTI, и, несмотря на возможность использования разных соответствующих процессов PC UL для учета разной помехи, UE 114 может действовать с разными соответствующими BLER для передачи TB данных. Например, помеха для передачи PUSCH от UE 114 в некоторых гибких TTI может быть обусловлена передачами DL и может быть значительно сильнее, чем помеха для передачи PUSCH от UE 114 в фиксированном TTI UL, которая всегда обусловлена передачами UL.
Хотя целевой BLER для TB данных можно регулировать для учета изменений общих условий эксплуатации, включающих в себя условия помехи, целевой BLER UCI обычно является фиксированным независимо от условий эксплуатации. Передача UCI в PUCCH может осуществляться только в фиксированных TTI, например TTI #2 для конфигураций UL-DL для TDD в таблице 2, и в этом случае она находится в практически стабильных условиях эксплуатации. Однако передача UCI в PUSCH, например, апериодическая передача CSI, инициированная PDCCH, переносящим формат DCI, планирующий PUSCH, может осуществляться либо в фиксированном TTI, либо в гибком TTI. Если передача CSI мультиплексируется в PUSCH в гибком TTI, то, в зависимости от соответствующих условий помехи, соответствующее количество RE, выделенных CSI, может потребоваться регулировать для учета различия в рабочем BLER для TB данных в гибком TTI относительно фиксированного TTI. Поскольку по практическим причинам мощность RE в одном и том же символе PUSCH одинакова, невозможно по отдельности управлять мощностью для RE CSI и RE информации данных в PUSCH. Однако регулировка количество RE, используемых для мультиплексирования CSI в PUSCH функционально эквивалентна осуществлению PC UL для CSI отдельно от PC UL для информации данных. Дополнительно, хотя первый процесс PC UL может использоваться для передач PUSCH в фиксированных TTI, и второй процесс PC UL может использоваться для передач PUSCH в, по меньшей мере, некоторых гибких TTI, второго процесса PC UL может быть недостаточно для повышения надежности приема для TB данных или для CSI, поскольку соответствующее UE может быть ограничено по мощности (уже работать вблизи максимальной мощности передачи), или сеть может выбирать отказываться от значительного увеличения соответствующей мощности передачи во избежание создания значительной помехи.
Для учета разных BLER TB данных в PUSCH между TTI, находящихся в значительно отличающихся условиях помехи, поддерживающих при этом одного и того же BLER UCI независимо от типа TTI, в гибком TTI для передачи CSI может использоваться другой , чем в фиксированном TTI. Таким образом, eNB 102 может конфигурировать для UE 114 два значения , причем первое значение используется для мультиплексирования CSI в PUSCH, передаваемом в первом наборе TTI, например, в фиксированном TTI или в гибком TTI, где UE 114 испытывает помеху, статистически аналогичную фиксированному TTI, и второе значение используется для мультиплексирования CSI в PUSCH, передаваемом во втором наборе, например, для гибких TTI, где передача PUSCH испытывает существенно другую помеху, чем в фиксированном TTI. Кроме того, поскольку передачи PUSCH SPS рассматриваются осуществляемыми в фиксированном TTI, первое значение используется в случае, когда соответствующий CSI мультиплексируется в передаче SPS PUSCH.
Фиг. 15 демонстрирует пример использования первого для определения объема ресурсов CSI в первом TTI и использования второго для определения объема ресурсов CSI во втором TTI согласно этому раскрытию. Хотя блок-схема операций изображает ряд последовательных этапов, если явно не указано обратное, из этой последовательности не следуют делать вывод о конкретном порядке осуществления, осуществлении этапов или их участков последовательно, а не одновременно, или с перекрыванием, или осуществлении указанных этапов исключительно в отсутствие переходных или промежуточных этапов. Процесс, представленный в описанном примере, реализуется цепью передатчика, например, на мобильной станции.
Как показано на фиг. 15, UE 114 обнаруживает PDCCH, переносящий формат DCI, планирующий PUSCH в TTI в операции 1510. UE 114 мультиплексирует CSI в PUSCH путем определения соответствующего количества RE, либо с использованием первого значения в операции 1520, если PUSCH передается в первом TTI из первого набора TTI в кадре или с использованием второго значения в операции 1530, если PUSCH передается во втором TTI из второго набора TTI в кадре. Таким образом, используется для передачи CSI в PUSCH для первого набора TTI в кадре и используется для передачи CSI в PUSCH для второго набора TTI в кадре.
Использование первого или второго при определении количества RE для мультиплексирования соответствующего CSI в передаче PUSCH в TTI может указываться UE 114 таким же образом, как использование первого процесса PC UL или второго процесса PC UL для передачи PUSCH, как было ранее описано (конфигурация посредством сигнализации RRC или динамическое указание форматом DCI). Кроме того, использование первого может быть непосредственно связано с использованием первого процесса PC UL, тогда как использование второго может быть непосредственно связано с использованием второго процесса PC UL (первый набор TTI в кадре сконфигурирован для использования первого процесса PC UL, и первый и второй набор TTI в кадре сконфигурирован для использования первого процесса PC UL и второго ).
Адаптация линии связи для повторных передач транспортных блоков данных
В некоторых вариантах осуществления аналогично адаптации линии связи передач UCI в PUSCH, который может испытывать разные характеристики помехи между фиксированным TTI и по меньшей мере одним гибким TTI, такая адаптация линии связи также может быть полезна для передач TB данных. Как рассмотрено ранее, использование отдельных процессов PC UL для сигнализации UL от UE 114 в TTI с преобладающей помехой UL и в TTI с преобладающей помехой DL может повышать надежность приема в TTI, где помеху, в основном, оказывают передачи DL на другие UE, но часто может быть трудно (например, вследствие ограничений мощности передачи UE или вследствие ограничений в дополнительной помехе UL) для обеспечения надежности приема, сравнимой с TTI, где помеху, в основном, оказывают передачи DL на другие UE.
Независимо от того, является ли повторная передача TB данных в PUSCH адаптивной (инициируемой обнаружением соответствующего PDCCH) или неадаптивной (инициируемой обнаружением значения NACK в соответствующем сигнале HARQ-ACK), используется тот же индекс  схемы модуляции и кодирования (MCS), что и для соответствующей начальной передачи TB данных, и обновляется только версия избыточности (RV) для процесса HARQ с использованием нарастающей избыточности (IR). Хотя целесообразно сохранять один и тот же MCS, когда повторная передача TB данных испытывает статистически такую же помеху, как начальная передача TB данных, это может быть вредно, когда помеха значительно различается между двумя передачами.
схемы модуляции и кодирования (MCS), что и для соответствующей начальной передачи TB данных, и обновляется только версия избыточности (RV) для процесса HARQ с использованием нарастающей избыточности (IR). Хотя целесообразно сохранять один и тот же MCS, когда повторная передача TB данных испытывает статистически такую же помеху, как начальная передача TB данных, это может быть вредно, когда помеха значительно различается между двумя передачами.
В первом подходе когда PUSCH, переносящий начальную передачу TB данных, передается в фиксированном TTI или в гибком TTI, где соответствующее UE испытывает преобладающую помеху от передач UL от других UE, и PUSCH, переносящий повторную передачу одного и того же TB данных передается в гибком TTI, где соответствующее UE испытывает преобладающую помеху от передач DL на другие UE, может быть полезно, чтобы MCS, используемая в повторной передаче TB данных, была ниже, чем MCS, используемая для начальной передачи того же TB данных. Это может обеспечивать надежность для значений демодулированных битов данных (до декодирования), сравнимую с надежностью начальной передачи TB данных, и позволяет правильно объединять соответствующие значения до декодирования TB данных. Напротив, когда PUSCH, переносящий начальную передачу TB данных, передается в гибком TTI, где соответствующее UE испытывает преобладающую помеху от передач DL на другие UE, и PUSCH, переносящий повторную передачу одного и того же TB данных передается в фиксированном TTI или в гибком TTI, где соответствующее UE испытывает преобладающую помеху от передач UL от других UE, может быть полезно, чтобы MCS, используемая для повторной передачи TB данных, была выше, чем MCS, используемая для начальной передачи того же TB данных.
Настоящее раскрытие предусматривает, что eNB 102 конфигурирует UE 114 сдвигом индекса MCS  , который UE 114 может применять при определении индекса MCS для повторной передачи TB данных. Если помеха в TTI, переносящем повторную передачу TB данных в PUSCH, статистически отличается от помехи в TTI, переносящем начальную передачу того же TB данных в PUSCH, и, обозначая
, который UE 114 может применять при определении индекса MCS для повторной передачи TB данных. Если помеха в TTI, переносящем повторную передачу TB данных в PUSCH, статистически отличается от помехи в TTI, переносящем начальную передачу того же TB данных в PUSCH, и, обозначая  индекс MCS для начальной передачи TB данных, UE 114 определяет индекс MCS
индекс MCS для начальной передачи TB данных, UE 114 определяет индекс MCS  для повторной передачи TB данных как
для повторной передачи TB данных как  , если TTI начальной передачи относится к тому же типу, что и TTI первого процесса PC UL и TTI повторной передачи, если относится к тому же типу, что и TTI второго процесса PC UL. В противном случае, если TTI начальной передачи относится к тому же типу, что и TTI второго процесса PC UL, и TTI повторной передачи, если относится к тому же типу, что и TTI первого процесса PC UL,
, если TTI начальной передачи относится к тому же типу, что и TTI первого процесса PC UL и TTI повторной передачи, если относится к тому же типу, что и TTI второго процесса PC UL. В противном случае, если TTI начальной передачи относится к тому же типу, что и TTI второго процесса PC UL, и TTI повторной передачи, если относится к тому же типу, что и TTI первого процесса PC UL,  .
.  и
и  являются, соответственно, минимальным и максимальным индексами MCS, поддерживаемыми для работы UE 114. Связь типа TTI с процессом PC UL отвечает ранее описанным способам определения для использования первого процесса PC UL (TTI находится в первом наборе) или второго процесса PC UL (TTI находится во втором наборе) и не зависит от того, действительно ли используется более одного процесса PC UL. Напротив, если помеха в TTI, переносящем повторную передачу TB данных в PUSCH, статистически идентична помехе в TTI, переносящем начальную передачу того же TB данных в PUSCH, сдвиг MCS не используется. Тогда
являются, соответственно, минимальным и максимальным индексами MCS, поддерживаемыми для работы UE 114. Связь типа TTI с процессом PC UL отвечает ранее описанным способам определения для использования первого процесса PC UL (TTI находится в первом наборе) или второго процесса PC UL (TTI находится во втором наборе) и не зависит от того, действительно ли используется более одного процесса PC UL. Напротив, если помеха в TTI, переносящем повторную передачу TB данных в PUSCH, статистически идентична помехе в TTI, переносящем начальную передачу того же TB данных в PUSCH, сдвиг MCS не используется. Тогда  .
.
Фиг. 16 демонстрирует пример использования сдвига индекса MCS для UE 114 для определения индекса MCS для повторной передачи TB данных согласно этому раскрытию. Хотя блок-схема операций изображает ряд последовательных этапов, если явно не указано обратное, из этой последовательности не следуют делать вывод о конкретном порядке осуществления, осуществлении этапов или их участков последовательно, а не одновременно, или с перекрыванием, или осуществлении указанных этапов исключительно в отсутствие переходных или промежуточных этапов. Процесс, представленный в описанном примере, реализуется цепью передатчика, например, на мобильной станции.
Как показано на фиг. 16, eNB 102 конфигурирует, с использованием сигнализации более высокого уровня, сдвиг  индекса MCS на UE 114 1610. Для повторной передачи TB данных в PUSCH во втором TTI в операции 1620, UE 114 определяет, относится ли второй TTI к тому же типу, что и первый TTI, для начальной передачи того же TB данных в соответствующем PUSCH в операции 1630. TTI может быть первого типа или второго типа, и соответствующее определение может быть, как описано ранее для UE 114 для определения, применять ли первый процесс PC UL или второй процесс PC UL для соответствующей передачи PUSCH. Если первый TTI и второй TTI относятся к одному и тому же типу, UE 114 определяет индекс MCS для повторной передачи TB данных, , равным индексу MCS для начальной передачи того же TB данных,
индекса MCS на UE 114 1610. Для повторной передачи TB данных в PUSCH во втором TTI в операции 1620, UE 114 определяет, относится ли второй TTI к тому же типу, что и первый TTI, для начальной передачи того же TB данных в соответствующем PUSCH в операции 1630. TTI может быть первого типа или второго типа, и соответствующее определение может быть, как описано ранее для UE 114 для определения, применять ли первый процесс PC UL или второй процесс PC UL для соответствующей передачи PUSCH. Если первый TTI и второй TTI относятся к одному и тому же типу, UE 114 определяет индекс MCS для повторной передачи TB данных, , равным индексу MCS для начальной передачи того же TB данных,  1640. Если первый TTI и второй TTI не относятся к одному и тому же типу, UE 114 определяет индекс MCS для повторной передачи TB данных как
1640. Если первый TTI и второй TTI не относятся к одному и тому же типу, UE 114 определяет индекс MCS для повторной передачи TB данных как  , если первый TTI относится к первому типу, и второй TTI относится ко второму типу в операции 1650, или как
, если первый TTI относится к первому типу, и второй TTI относится ко второму типу в операции 1650, или как  , если первый TTI относится ко второму типу, и второй TTI относится к первому типу в операции 1660.
, если первый TTI относится ко второму типу, и второй TTI относится к первому типу в операции 1660.
Во втором подходе одна и та же MCS может использоваться для начальной передачи и для повторной передачи одного и того же TB данных, но eNB 102 может по-разному масштабировать, до объединения для декодирования TB данных, значения демодулированных битов данных, которые он принимает в TTI, где UE 114 испытывает преобладающую помеху UL и применяет первый процесс PC UL, и значения демодулированных битов данных, которые он принимает в TTI, где UE 114 испытывает преобладающую помеху DL и применяет второй процесс PC UL. Это позволяет получать операцию, функционально аналогичную применению сдвига MCS, как было рассмотрено ранее, но, вместо применения такой регулировки передачи на UE 114 для повторной передачи TB данных, аналогичная регулировка приема применяется на eNB 102 для повторной передачи TB данных.
Фиг. 17 демонстрирует пример масштабирования демодулированных значений для битов информации данных из повторной передачи TB данных до объединения с демодулированными значениями для битов информации данных из начальной передачи одного и того же TB данных до декодирования согласно этому раскрытию. Хотя блок-схема операций изображает ряд последовательных этапов, если явно не указано обратное, из этой последовательности не следуют делать вывод о конкретном порядке осуществления, осуществлении этапов или их участков последовательно, а не одновременно, или с перекрыванием, или осуществлении указанных этапов исключительно в отсутствие переходных или промежуточных этапов. Процесс, представленный в описанном примере, реализуется цепью передатчика, например, на мобильной станции.
Как показано на фиг. 17, eNB 102 принимает повторную передачу TB данных во втором TTI в операции 1710 и определяет, относится ли второй TTI к тому же типу, что и первый TTI, где eNB 102 принимает начальную передачу того же TB данных в операции 1720. Если это так, демодулированные биты данных, соответствующие кодированным битам информации данных, принятым во втором TTI, масштабируются первым числом до объединения с демодулированными битами данных, соответствующими кодированным битам информации данных, принятым в первом TTI до декодирования, в операции 1730. Например, первое число может быть равно единице, и демодулированные биты данных объединяются с их фактическими значениями, которые захватывают соответствующий SINR. Если это не так и первый TTI относится к первому типу и второй TTI относится ко второму типу, демодулированные биты данных, соответствующие кодированным битам информации данных, принятым во втором TTI, масштабируются вторым числом до объединения с демодулированными битами данных, соответствующими кодированным битам информации данных, принятым в первом TTI до декодирования, в операции 1740. Например, второе число может быть меньше единице. Если это не так и первый TTI относится ко второму типу и второй TTI относится к первому типу, демодулированные биты данных, соответствующие кодированным битам информации данных, принятым во втором TTI, масштабируются третьим числом до объединения с демодулированными битами данных, соответствующими кодированным битам информации данных, принятым в первом TTI до декодирования, в операции 1750. Например, третье число может быть больше единицы. Аналогично использованию сдвига MCS, такое масштабирование, в частности, применимо, если второй процесс PC UL не может полностью компенсировать преобладающую помеху DL во втором наборе TTI UL вследствие ограничений по мощности передачи UL от UE 114, либо поскольку дополнительная мощность недоступна, либо поскольку это полезно во избежание увеличения помехи для других сот.
Хотя настоящее раскрытие описано в иллюстративном варианте осуществления, специалист в данной области техники может предложить различные изменения и модификации. Предполагается, что настоящее раскрытие охватывает такие изменения и модификации в объеме нижеследующей формулы изобретения.


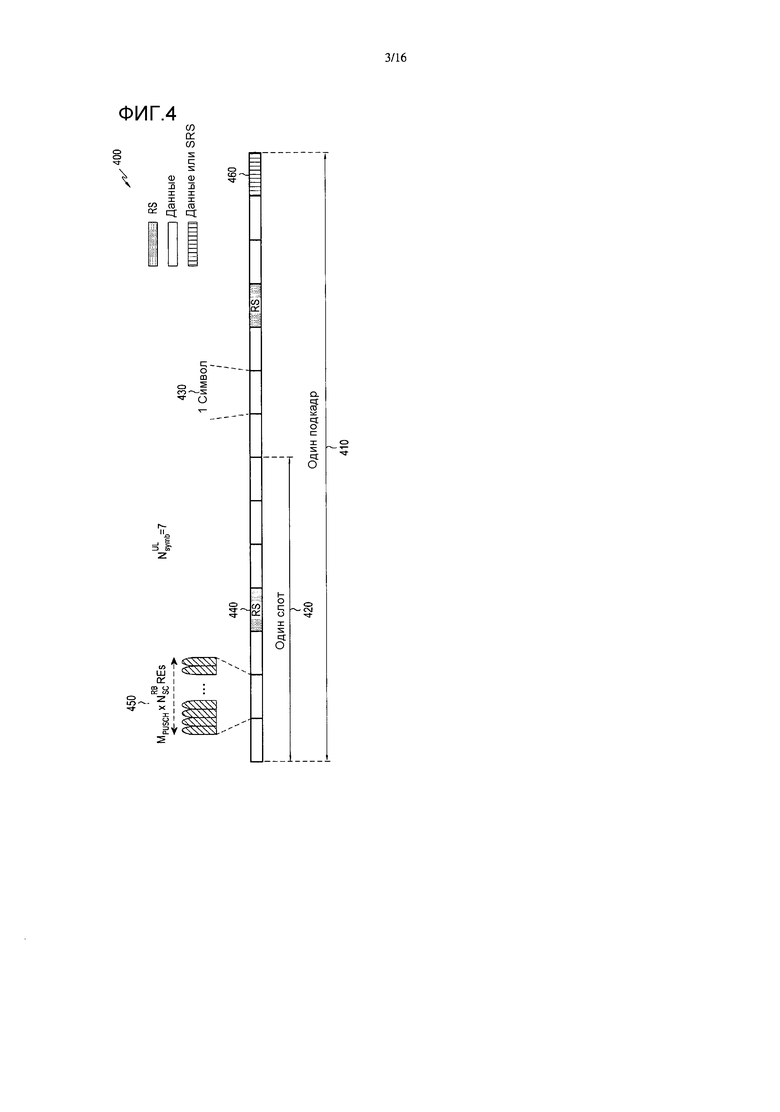







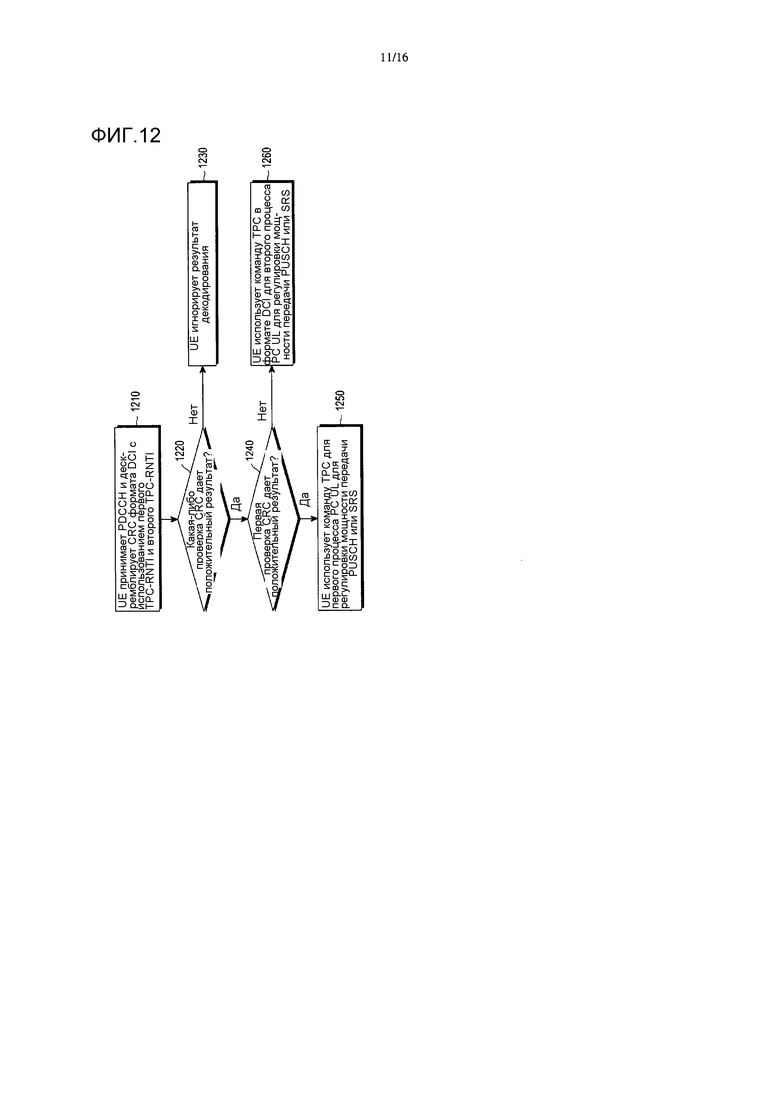
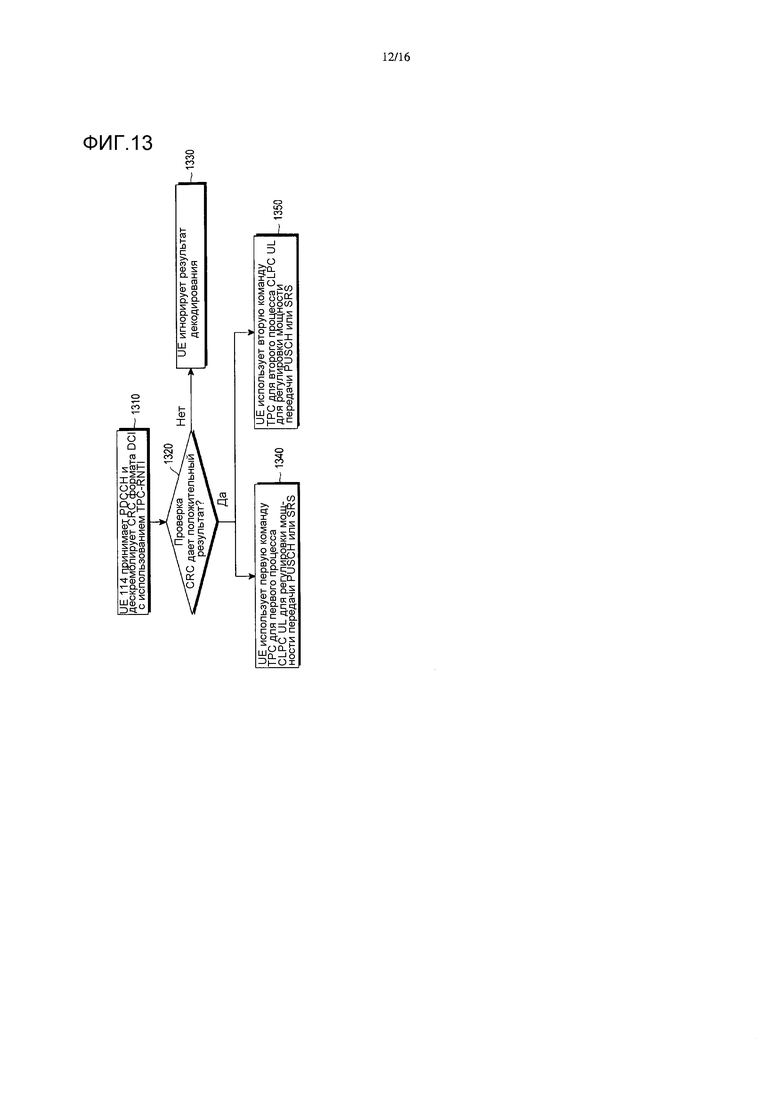

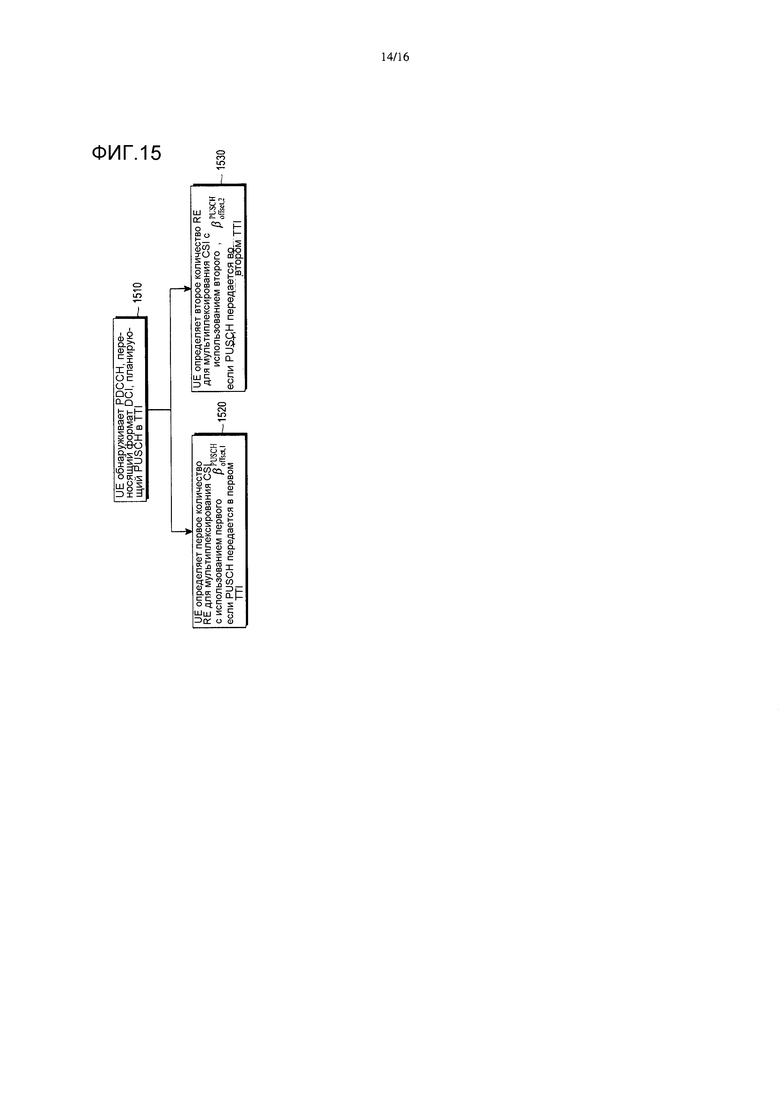


Изобретение относится к беспроводной связи. Технический результат заключается в повышении эффективности радиоинтерфейса и улучшении выделения нового спектра. Предусмотрены способы и устройство базовой станции или пользовательского оборудования (UE), осуществляющих связь друг с другом. UE сконфигурировано посредством базовой станции для работы с адаптированной конфигурацией восходящей-нисходящей линии связи (UL-DL) для дуплексной связи с временным разделением (TDD). Предусмотрены процесс, допускающий управление мощностью UL для передач различных каналов или сигналов от UE в двух разных наборах интервалов времени передачи (TTI) UL, и процесс, допускающий приемы транспортных блоков данных посредством базовой станции в двух разных наборах TTI UL. 4 н. и 24 з.п. ф-лы, 17 ил., 2 табл.
1. Способ передачи данных на физическом совместно используемом канале восходящей линии связи (PUSCH) в подкадре посредством пользовательского оборудования (UE), причем способ содержит этапы, на которых:
принимают первую информацию, связанную с первым процессом управления мощностью, и вторую информацию, связанную со вторым процессом управления мощностью;
определяют первую мощность для передачи PUSCH в подкадре с использованием первого процесса управления мощностью, когда подкадр принадлежит первому набору подкадров;
определяют вторую мощность для передачи PUSCH в подкадре с использованием второго процесса управления мощностью, когда подкадр принадлежит второму набору подкадров; и
передают данные на PUSCH с упомянутой определенной первой мощностью или второй мощностью.
2. Способ по п. 1, в котором первая информация или вторая информация включает в себя компонент, характерный для соты (PO_NOMINAL_PUSCHE,c), компонент, характерный для UE (PO_UE_PUSCH,c), и параметр (αc) для управления мощностью без обратной связи в качестве параметров управления мощностью для первого процесса управления мощностью или для второго процесса управления мощностью, соответственно.
3. Способ по п. 1, в котором UE принимает информацию, которая включает в себя параметр (ƒc) для первого управления мощностью с обратной связью для первого процесса управления мощностью, когда подкадр находится в первом наборе подкадров, или для второго управления мощностью с обратной связью для второго процесса управления мощностью, когда подкадр находится во втором наборе подкадров.
4. Способ по п. 1, дополнительно содержащий этап, на котором принимают информацию, указывающую первый набор подкадров и второй набор подкадров.
5. Способ по п. 1, причем способ дополнительно предназначен для передачи зондирующего опорного сигнала (SRS).
6. Способ по п. 1, дополнительно содержащий этапы, на которых принимают информацию о первом смещении и информацию о втором смещении для определения ресурсов для передачи информации состояния канала в PUSCH; и
передают информацию состояния канала в PUSCH с использованием первого смещения, когда подкадр находится в первом наборе подкадров, или с использованием второго смещения, когда подкадр находится во втором наборе подкадров.
7. Способ по п. 1, дополнительно содержащий этап, на котором передают данные в PUSCH с использованием схемы модуляции и кодирования (MCS) из первого набора MCS, когда подкадр находится в первом наборе подкадров, или с использованием MCS из второго набора MCS, когда подкадр находится во втором наборе подкадров.
8. Пользовательское оборудование (UE) для передачи данных на физическом совместно используемом канале восходящей линии связи (PUSCH) в подкадре, причем UE содержит:
приемопередатчик, выполненный с возможностью передавать или принимать сигнал; и
контроллер, выполненный с возможностью управления тем, чтобы:
принимать первую информацию, связанную с первым процессом управления мощностью, и вторую информацию, связанную со вторым процессом управления мощностью;
определять первую мощность для передачи PUSCH в подкадре с использованием первого процесса управления мощностью, когда подкадр принадлежит первому набору подкадров;
определять вторую мощность для передачи PUSCH в подкадре с использованием второго процесса управления мощностью, когда подкадр принадлежит второму набору подкадров; и
передавать данные на PUSCH с упомянутой определенной первой мощностью или второй мощностью.
9. UE по п. 8, в котором первая информация или вторая информация включает в себя компонент, характерный для соты (PO_NOMINAL_PUSCH,c), компонент, характерный для UE (PO_UE_PUSCH,c), и параметр (αc) для управления мощностью без обратной связи в качестве параметров управления мощностью для первого процесса управления мощностью или для второго процесса управления мощностью, соответственно.
10. UE по п. 8, в котором контроллер дополнительно выполнен с возможностью управления тем, чтобы принимать информацию, которая включает в себя параметр (ƒc) для первого управления мощностью с обратной связью для первого процесса управления мощностью, когда подкадр находится в первом наборе подкадров, или для второго управления мощностью с обратной связью для второго процесса управления мощностью, когда подкадр находится во втором наборе подкадров.
11. UE по п. 8, в котором контроллер дополнительно выполнен с возможностью управления тем, чтобы принимать информацию, указывающую первый набор подкадров и второй набор подкадров.
12. UE по п. 8, в котором контроллер дополнительно выполнен с возможностью управления тем, чтобы передавать зондирующий опорный сигнал (SRS) таким же образом, который используется при передаче PUSCH.
13. UE по п. 8, в котором контроллер дополнительно выполнен с возможностью управления тем, чтобы принимать информацию о первом смещении и информацию о втором смещении для определения ресурсов для передачи информации состояния канала в PUSCH; и
передавать информацию состояния канала в PUSCH с использованием первого смещения, когда подкадр находится в первом наборе подкадров, или с использованием второго смещения, когда подкадр находится во втором наборе подкадров.
14. UE по п. 8, в котором контроллер дополнительно выполнен с возможностью управления тем, чтобы передавать данные в PUSCH с использованием схемы модуляции и кодирования (MCS) из первого набора MCS, когда подкадр находится в первом наборе подкадров, или с использованием MCS из второго набора MCS, когда подкадр находится во втором наборе подкадров.
15. Способ приема данных на физическом совместно используемом канале восходящей линии связи (PUSCH) в подкадре посредством базовой станции, причем способ содержит этапы, на которых:
передают первую информацию, связанную с первым процессом управления мощностью, и вторую информацию, связанную со вторым процессом управления мощностью; и
принимают данные, переданные на PUSCH с первой мощностью или второй мощностью,
причем первая мощность определена в пользовательском оборудовании (UE) для передачи PUSCH в подкадре с использованием первого процесса управления мощностью, когда подкадр принадлежит первому набору подкадров;
причем вторая мощность определена в UE для передачи PUSCH в подкадре с использованием второго процесса управления мощностью, когда подкадр принадлежит второму набору подкадров.
16. Способ по п. 15, в котором первая информация или вторая информация включает в себя компонент, характерный для соты (PO_NOMINAL_PUSCH,c), компонент, характерный для UE (PO_UE_PUSCH,c), и параметр (αc) для управления мощностью без обратной связи в качестве параметров управления мощностью для первого процесса управления мощностью или для второго процесса управления мощностью, соответственно.
17. Способ по п. 15, в котором базовая станция дополнительно передает информацию, которая включает в себя параметр (ƒc) для первого управления мощностью с обратной связью для первого процесса управления мощностью, когда подкадр находится в первом наборе подкадров, или для второго управления мощностью с обратной связью для второго процесса управления мощностью, когда подкадр находится во втором наборе подкадров.
18. Способ по п. 15, в котором базовая станция дополнительно передает информацию, указывающую первый набор подкадров и второй набор подкадров.
19. Способ по п. 15, причем способ дополнительно предназначен для приема зондирующего опорного сигнала (SRS).
20. Способ по п. 15, дополнительно содержащий этапы, на которых передают информацию о первом смещении и информацию о втором смещении для определения ресурсов для передачи информации состояния канала в PUSCH; и
принимают информацию состояния канала в PUSCH с использованием первого смещения, когда подкадр находится в первом наборе подкадров, или с использованием второго смещения, когда подкадр находится во втором наборе подкадров.
21. Способ по п. 15, дополнительно содержащий этап, на котором принимают данные в PUSCH с использованием схемы модуляции и кодирования (MCS) из первого набора MCS, когда подкадр находится в первом наборе подкадров, или с использованием MCS из второго набора MCS, когда подкадр находится во втором наборе подкадров.
22. Базовая станция для приема данных на физическом совместно используемом канале восходящей линии связи (PUSCH) в подкадре, причем базовая станция содержит:
приемопередатчик, выполненный с возможностью передавать или принимать сигнал; и
контроллер, выполненный с возможностью управления тем, чтобы:
передавать первую информацию, связанную с первым процессом управления мощностью, и вторую информацию, связанную со вторым процессом управления мощностью; и
принимать данные, переданные на PUSCH с первой мощностью или второй мощностью,
причем первая мощность определена в пользовательском оборудовании (UE) для передачи PUSCH в подкадре с использованием первого процесса управления мощностью, когда подкадр принадлежит первому набору подкадров;
причем вторая мощность определена в UE для передачи PUSCH в подкадре с использованием второго процесса управления мощностью, когда подкадр принадлежит второму набору подкадров.
23. Базовая станция по п. 22, в которой первая информация или вторая информация включает в себя компонент, характерный для соты (PO_NOMINAL_PUSCH,c), компонент, характерный ДЛЯ UE (PO_UE_PUSCH,c), и параметр (αc) для управления мощностью без обратной связи в качестве параметров управления мощностью для первого процесса управления мощностью или для второго процесса управления мощностью, соответственно.
24. Базовая станция по п. 22, в которой контроллер дополнительно выполнен с возможностью управления тем, чтобы передавать информацию, которая включает в себя параметр (ƒc) для первого управления мощностью с обратной связью для первого процесса управления мощностью, когда подкадр находится в первом наборе подкадров, или для второго управления мощностью с обратной связью для второго процесса управления мощностью, когда подкадр находится во втором наборе подкадров.
25. Базовая станция по п. 22, в которой контроллер дополнительно выполнен с возможностью управления тем, чтобы передавать информацию, указывающую первый набор подкадров и второй набор подкадров.
26. Базовая станция по п. 22, в которой контроллер дополнительно выполнен с возможностью управления тем, чтобы принимать зондирующий опорный сигнал (SRS) таким же образом, который используется при приеме PUSCH.
27. Базовая станция по п. 22, в которой контроллер дополнительно выполнен с возможностью управления тем, чтобы:
передавать информацию о первом смещении и информацию о втором смещении для определения ресурсов для передачи информации состояния канала в PUSCH; и
принимать информацию состояния канала в PUSCH с использованием первого смещения, когда подкадр находится в первом наборе подкадров, или с использованием второго смещения, когда подкадр находится во втором наборе подкадров.
28. Базовая станция по п. 22, в которой контроллер дополнительно выполнен с возможностью управления тем, чтобы принимать данные в PUSCH с использованием схемы модуляции и кодирования (MCS) из первого набора MCS, когда подкадр находится в первом наборе подкадров, или с использованием MCS из второго набора MCS, когда подкадр находится во втором наборе подкадров.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| УСТРОЙСТВО И СПОСОБ АДАПТИВНОГО ИЗМЕНЕНИЯ СХЕМЫ УПРАВЛЕНИЯ МОЩНОСТЬЮ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ В СООТВЕТСТВИИ СО СТАТУСОМ МОБИЛЬНОГО ТЕРМИНАЛА В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ С TDD | 2005 |
|
RU2355112C2 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

