ОБЛАСТЬ ТЕХНИКИ
Предлагаемое изобретение относится к изготовлению устройств детектирования видимого или рентгеновского изображения или изображения, полученного при регистрации рентгеновского или гамма-излучения, в частности, устройств для рентгеновской маммографии и томосинтеза.
УРОВЕНЬ ТЕХНИКИ
Для построения цифровых матричных сенсоров изображения, рентгеновских детекторов, в том числе в маммографии, применяются т.н. «плоскопанельные» датчики видимого изображения, которые регистрируют видимое излучение или конвертированное рентгеновское изображение («тень») исследуемого объекта. Такие детекторы на плоских панелях представляют собой полноформатный пространственный (матричный) сенсор изображения с масштабом преобразования 1:1.
Непосредственно фотодетектор обладает высокой чувствительностью в зоне длин волн видимого света (400-700 нм), но к рентгеновскому излучению, как правило, нечувствителен. Соответственно, для конвертирования рентгеновского изображения в видимое применяются т.н. сцинтилляционные экраны (сцинтилляторы), которые строятся на базе люминофорных покрытий различной эффективности и рассеивающих характеристик. Такой экран физически апплицируется к волоконно-оптической плите (ВОП), переносящей изображение от сцинтиллятора к фотоприемнику, с одной стороны, и блокирующей рентгеновской излучение, не поглощенное в слое люминофора, с другой, образуя стек преобразования «рентгеновское изображение - электрический сигнал». Сигнал, в свою очередь, преобразуется в цифровую форму и передается на обработку и визуализацию. Аналогичной конструкции экраны используются в детекторах для регистрации гамма-излучения.
Из уровня техники известен метод монтажа многочиповых фотоприемников на оптической опорной плите при помощи несущей металлической рамы с возможностью последующего перенесения упомянутого матричного фотоприемника на волоконно-оптическую плиту (патент РФ 136639 «УСТРОЙСТВО ДЛЯ СБОРКИ МАТРИЧНОГО ФОТОПРИЕМНИКА»). Недостатком данного метода является высокая вероятность повреждения фотоприемников при манипуляциях совмещения, т.к. их активная поверхность находится в прямом контакте с жесткой опорной плитой. Также для установки ВОП, так или иначе, требуется дополнительная серия процедур установки совмещения, что удорожает и усложняет техпроцесс.
В качестве второго ближайшего аналога выбран способ, описанный в WO 2012-145038 А1 (Teledyne Rad-Icon Imaging Corp.).
Недостатком известного способа является необходимость использования применяемой оснастки как финального элемента конструкции собираемой матрицы фотосенсоров. В результате возрастают количество деталей сборки и стоимость изделия. Также не отпадает необходимость в высокоточной операции установки матрицы на ВОП и совмещения с ней.
Также близкими аналогами предлагаемого способа могут служить установка, разработанная авторами исследовательской группы в составе Travis Lange, Tim Bond, James Chiang, Andrew P. Rasmussen and colleagues и упоминаемая в публикации «Integration and Verification Testing of the Large Synoptic Survey Telescope Саmеrа» (SLAC National Accelerator Laboratory, MenloPark, CA, United States). Минусом способа, применяемого в описываемой установке, очевидно является высокая сложность и громоздкость системы совмещения и юстировки, а также медленный, подходящий только для единичных сборок, процесс. Кроме того, дополнительно закрепляемые на фотоприемниках детали сильно увеличивают общие глубину и вес финальной конструкции.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача, на решение которой направлен предлагаемый способ, заключается в упрощении процесса монтажа многочипового (состоящего из нескольких кремниевых пластин) детектора излучений, обеспечивающего высокий выход годных детекторов при производстве.
Целью монтажа является взаимное совмещение фотоприемников относительно ВОП и одновременно взаимное совмещение относительно друг друга. В частности, одно из существенных требований при сборке матрицы (матрицы фотоприемников) - это обеспечение возможно малого зазора между фотоприемниками. Нижнее ограничение величины зазора определяется требованиями на диапазон температур, при котором собранная матрица хранится и эксплуатируется, т.к. не должно произойти физического столкновения кремниевых пластин отдельных фотоприемников при возможном понижении температуры. Такое столкновение способно привести к механическому повреждению кремниевых чипов и выходу из строя фотоприемников.
Верхнее ограничение величины зазора нормируется задачей восстановления целостности изображения в области стыковки фотоприемников и, как правило, лимитируется величиной в 1-2 шага ячейки (пиксела) фотоприемника.
Таким образом, процесс совмещения фотоприемников должен весьма жестко контролироваться для получения высокой точности сборки. Для реальных фотоприемников с размером ячейки 50-100 мкм необходимая точность стыковки оценивается в 5-10 мкм, т.е. на порядок выше, чем шаг пиксела.
Технический результат, достигаемый при осуществлении предложенного способа, заключается в уменьшении механических нагрузок на матричные фотоприемники в процессе монтажа, упрощении технологии монтажа и уменьшении веса собранных матричных детекторов, повышение технологичности при одновременном расширении области применения.
Для решения поставленной задачи и достижения заявленного технического результата предложен способ, при котором ВОП является сборочной и, одновременно, выравнивающей поверхностью для т.н. оптической плоскости, представляющей собой матрицу из нескольких чипов матричных фотоприемников. Таким образом, одна из деталей конструкции детектора, фактически, служит оснасткой при его сборке, что уменьшает общий номенклатурный лист изделий и сокращает техпроцесс сборки.
Поставленная задача и требуемый технический результат достигаются за счет нового способа монтажа многоэлементного сцинтилляционного детектора проникающих излучений, в котором по меньшей мере один матричный фотоприемник бесконтактно контролируемо юстируют, вращают и перемещают по жидкой фазе оптического полимера, предварительно нанесенного на по меньшей мере часть поверхности волоконно-оптической плиты, с последующей фиксацией отверждением указанного полимера, где на этапах юстировки, вращения и перемещения для предотвращения механического воздействия на матричный фотоприемник используется гидропланирование, при этом на этапе перемещения матричного фотоприемника его электронная схема может быть подключена к электронным блокам системы считывания информации.
Согласно предложенному способу на обратную сторону волоконно-оптической плиты может быть спроектировано по меньшей мере одно изображение тестового объекта, с целью точного текущего контроля положения матричного фотоприемника при монтаже. В процессе перемещения матричного фотоприемника его положение контролируется по изображению на обратной стороне волоконно-оптической плиты.
Согласно предложенному способу на поверхности волоконно-оптической плиты предварительно формируют направляющие и ограничивающие движение матричного фотоприемника структурные элементы, например, методом 3D литографии в полимеризующихся жидкостях. Сформированные структурные элементы направляют и ограничивают перемещение матричного фотоприемника не только в плоскости перемещения, но и в перпендикулярном указанной плоскости направлении.
Для предотвращения механического воздействия на матричный фотоприемник на этапах юстировки, вращения и перемещения используют электромагнитные двигатели линейного позиционирования без механической связи ротора и статора.
Согласно предложенному способу в качестве матричного фотоприемника используют, в одном из вариантов, кремниевый бесподложечный чип.
Согласно предложенному способу контактные соединения и внешние схемы указанного кремниевого бесподложечного чипа устанавливают на указанную волоконно-оптическую плиту после монтажа.
Поверхность ВОП является именно той поверхностью, с которой необходимо обеспечить наиболее плотный оптический контакт матричных фотоприемников для максимального контраста и разрешения в работе сцинтилляционных гибридных фотоприемников. Таким образом, наиболее естественным способом монтажа был бы прямой монтаж на указанной поверхности, однако ряд операций монтажа трудновыполнимы при этом, для минимизации механических воздействий на матричные фотоприемники предлагается использовать предварительно нанесенные на ВОП разделительные и поддерживающие столбчатые элементы, изготавливаемые методом 3D литографии (стереолитографии). Фоточувствительный детектор, в лучшем варианте, будет содержать минимум элементов конструкции, а именно: волоконно-оптическую плиту, кремниевые чипы фотоприемников и периферийные узлы сопряжения, представляющие собой зону разварки выводов чипов и печатные узлы с буферными схемами и электрическими соединителями для передачи данных изображения в схемы обработки.
Жидкий, в дальнейшем ходе процесса отверждаемый полимер, наносимый на поверхность ВОП перед началом сборки, служит одновременно нескольким целям: защита поверхности фотоприемников от прямого соприкосновения с ВОП; оптическая иммерсия, позволяющая минимизировать потери света на границах материалов; антифрикционная среда, значительно облегчающая возможность перемещения чипов фотоприемников относительно ВОП. Также упомянутый полимер создает клеевое долговечное соединение между ВОП и поверхностью фотоприемника, образуя в результате высокостабильную конструкцию, т.к. температурные коэффициенты расширения кремния и стекла, которое составляет основной материал ВОП, близки.
Расширение области применения достигается за счет окончательной фиксации чипов фотоприемников непосредственно на ВОП и, так как волоконно-оптическая плита имеет коэффициент температурного расширения (КТР), сравнимый с КТР кремния, который является материалом чипа фотосенсора, увеличивается допустимый диапазон температур эксплуатации и хранения изготавливаемого изделия. Кроме того, отсутствие необходимости оставлять в собираемой конструкции элементы юстировки снижает общие габариты изделия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
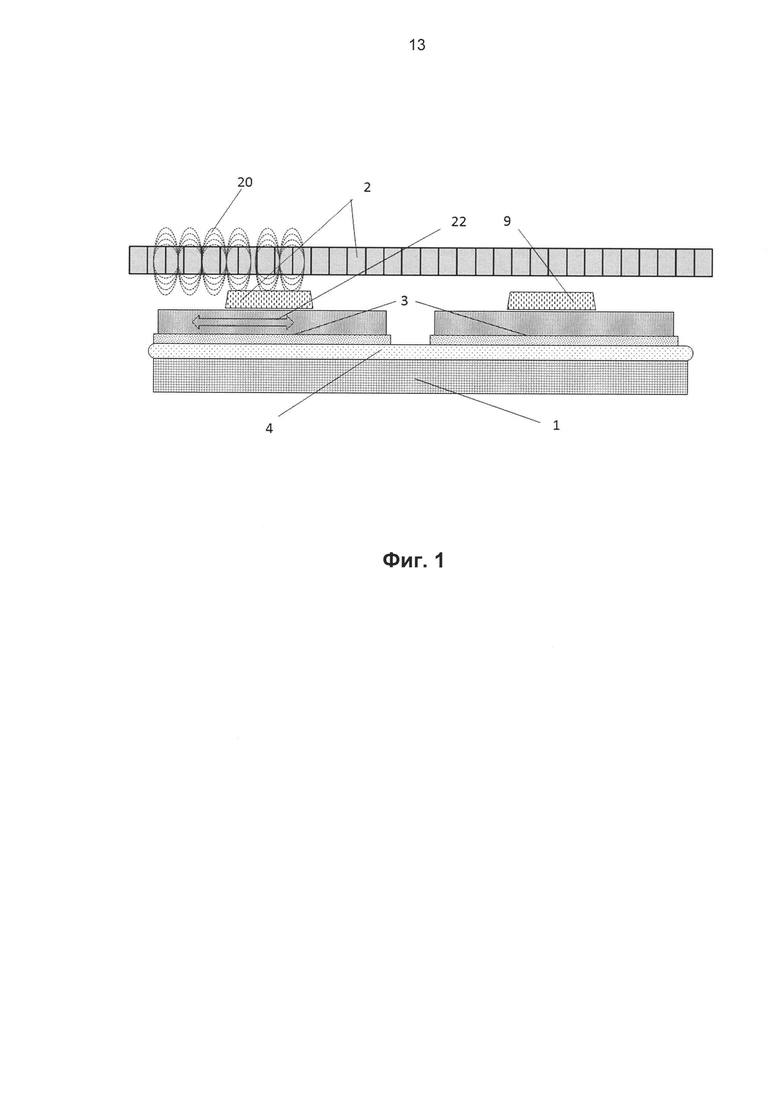
На Фиг. 1 изображен поперечный срез установки, выполняющей совмещение фотоприемников (3), расположенных на иммерсионном слое жидкого полимера (иммерсионно-клеевого слоя в дальнейшем) (4), нанесенного, в свою очередь, на ВОП (1). Перемещение фотоприемников осуществляется с помощью системы линейного шагового перемещения (2), состоящей из катушек, формирующих многофазовое магнитное поле (20) и воздействующее на постоянные магниты (9), закрепленные (временно) на обратной стороне фотоприемников. В результате данного воздействия происходит перемещение (22) фотоприемников, необходимое в процессе их совмещения.
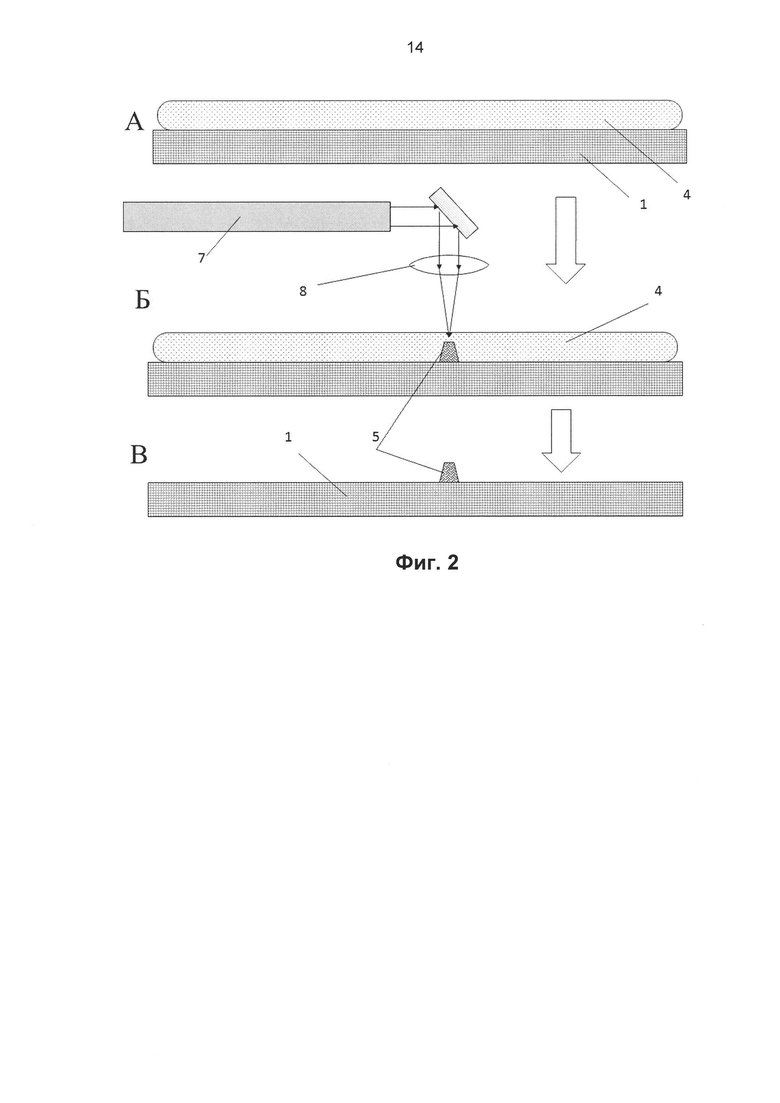
На Фиг. 2 показаны этапы формирования разделительных (барьерных) и поддерживающих (опорных) столбиков на поверхности ВОП:
A) на поверхность ВОП (1) наливается жидкий фотополимер (4);
Б) с помощью лазера (7) и проекционной системы (8) в толще фотополимера (4) формируются отвержденные столбчатые или полусферические участки (5);
B) неотвержденный полимер опционально удаляется с ВОП (1), на поверхности остаются сформированные барьерные столбики (5).
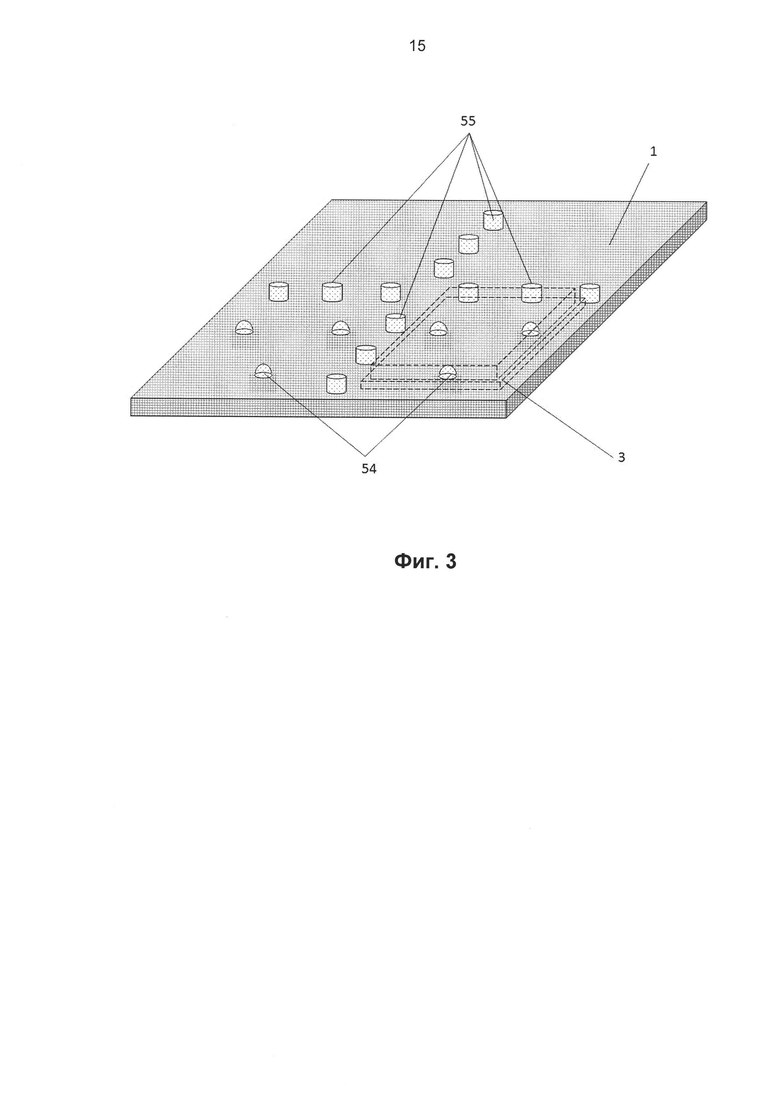
На Фиг. 3 схематически показана матрица барьерных столбцов (55) и матрица опорных полусфер (54), также сформированных с помощью фотоотверждения полимера или прямой печати полимерным материалом на поверхности ВОП (1). Фотоприемник (3) располагается на опорных полусферах, тем самым исключается прямой контакт между поверхностями фотоприемника и ВОП.
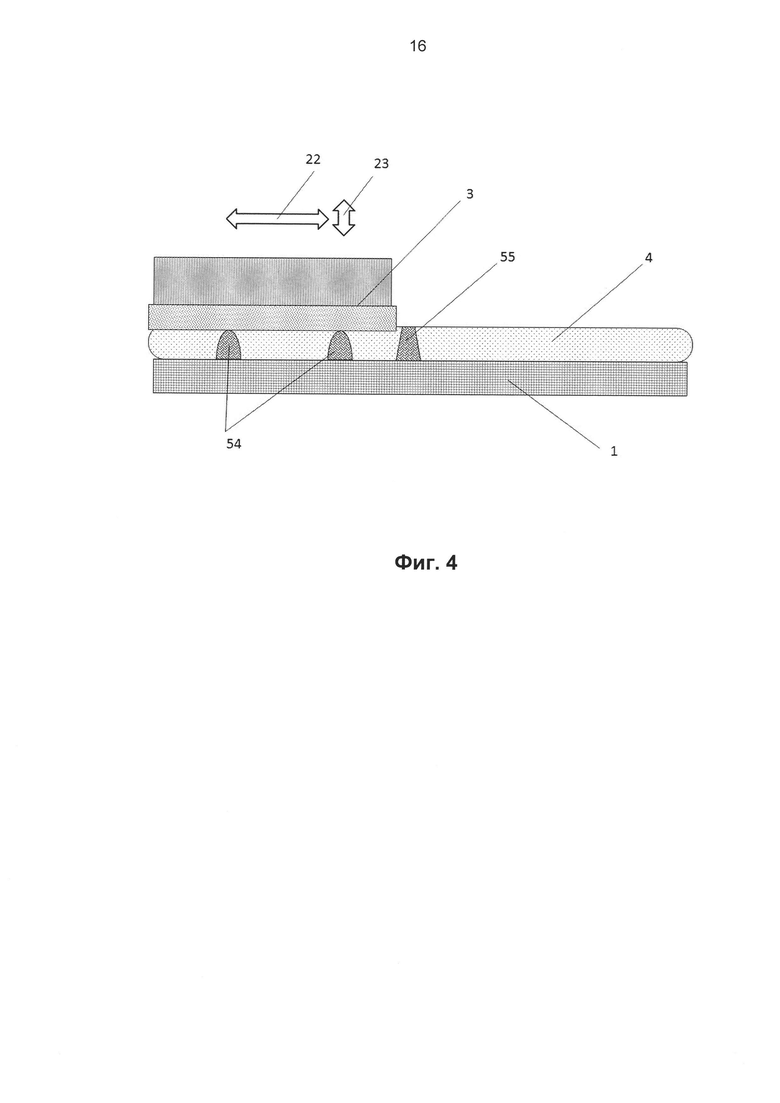
На Фиг. 4 схематически изображен процесс перемещения по осям X (22) и Y (23) фотоприемника (3) в процессе совмещения. Фотоприемник скользит по жидкому (впоследствии отверждаемому) полимеру 4, в то же время опорные полусферы (54) обеспечивают постоянный малый зазор между ВОП (1) и кремниевым чипом фотоприемника (3).
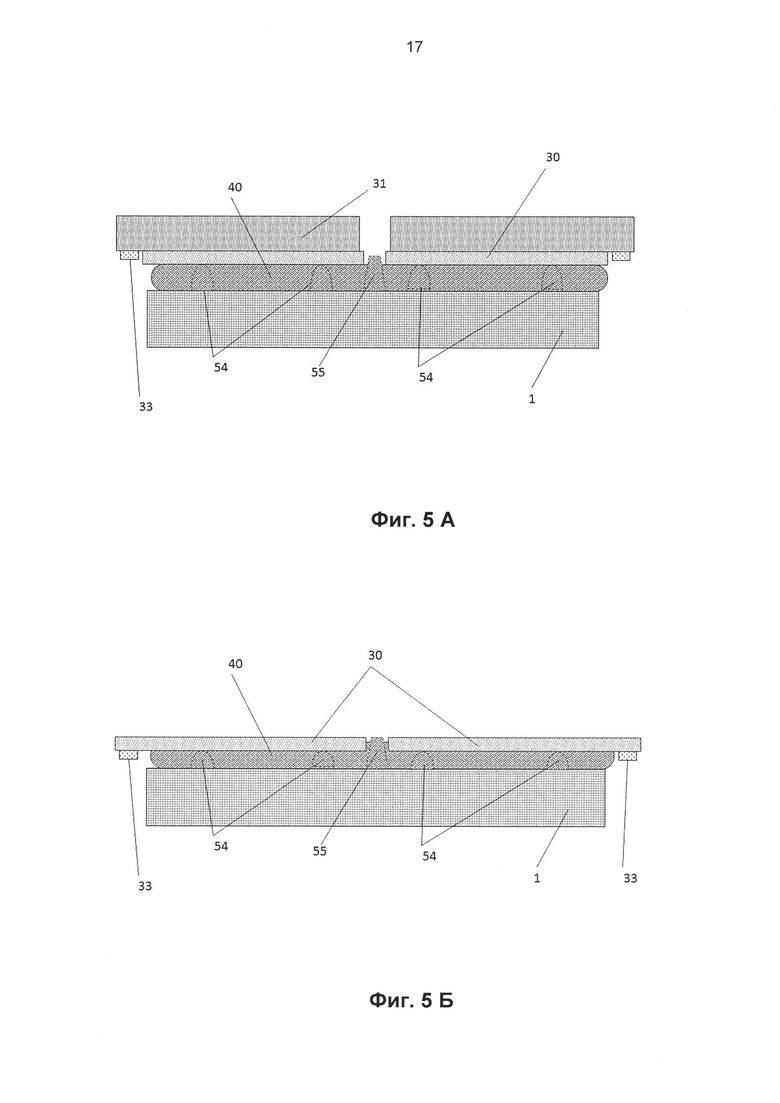
На Фиг. 5 показаны варианты совмещения фотоприемников с подложкой и без нее:
А) кремниевый чип фотоприемника (30) с подложкой (31) приклеен на ВОП (1) нанесенным и затем отвержденным полимером (40). Справочно показана зона разварки выводов чипа фотоприемника (33);
Б) безподложечный фотоприемник (30) приклеен на ВОП (1) нанесенным и затем отвержденным полимером (40), также показаны сформированные в жидком полимере (до отверждения основного его объема) опорные полусферы (54) и ограничивающие столбики (55), которые фиксируют расстояние между поверхностями и торцами кремниевых чипов и ВОП.
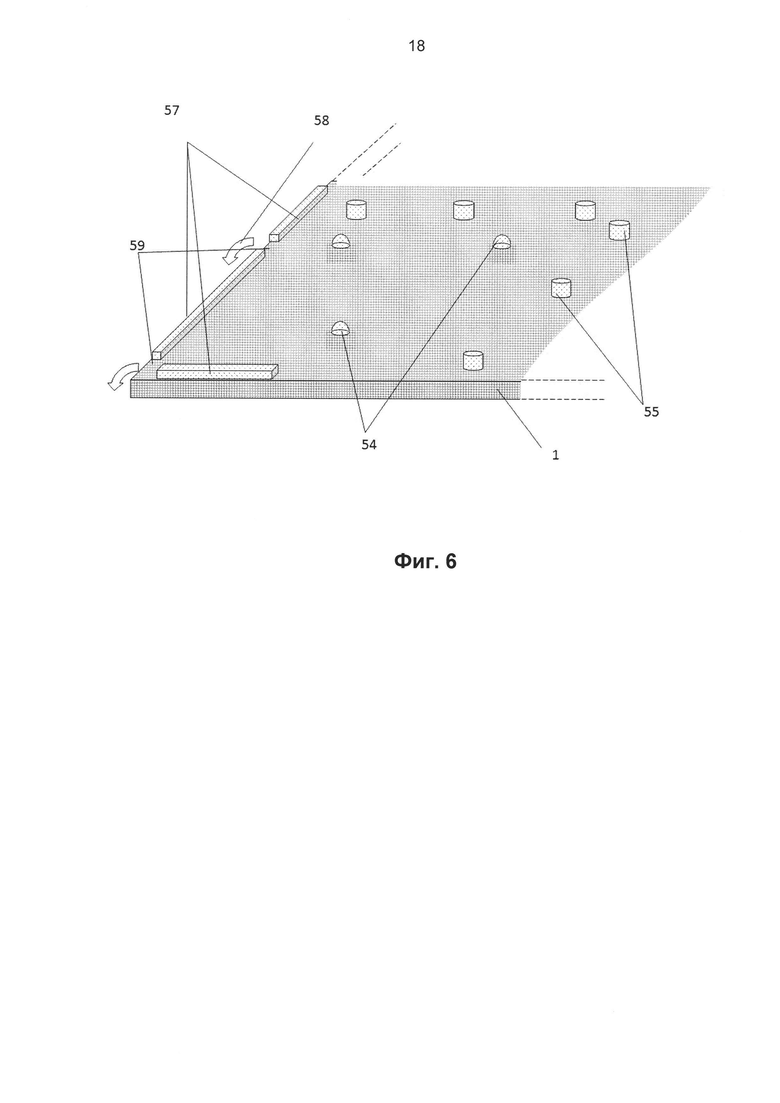
На Фиг. 6 - показан фрагмент ВОП (1) с барьером из столбиков (55), с матрицей опорных полусфер (54) и сформированными на поверхности ВОП структурами для обеспечения контролируемого удаления излишков жидкого полимера, где:
57 - бортики, сформированные на поверхности ВОП;
58 - слив излишков полимера
59 - каналы между бортиками для удаления излишков полимера;
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Матричный фотодетектор состоит из по меньшей мере одного фотоприемника (3), расположенного на ВОП (1), закрепленного при помощи полимеризованного (40) жидкого оптического полимера (4). Описание способа предполагает различение фаз полимера в указании на фигурах чертежей. В контексте данного описания жидкая фаза полимера отмечена номером 4, а отвержденная - номером 40.
Первоначально, жидкий полимер распределяется по площади ВОП - равномерно или частично - после чего фотоприемник или несколько фотоприемников помещаются на образованную полимером поверхность. Под частичным распределением полимера подразумевается нанесение его в необходимом объеме, но не на всю поверхность, а на ее часть - обычно в форме капли, овала или гантели. В случае частичного распределения полимера на ВОП он растекается по всей площади за счет компрессионных сил и капиллярного эффекта. На этом этапе фотоприемники могут быть помещены на ВОП с относительно низкой точностью.
Описанному первому этапу предшествует подготовка поверхности ВОП, в процессе которой формируется разделительный ряд столбцов (55) из полимера, который препятствует столкновению чипов фотоприемников при совмещении и позволяет выдержать необходимый зазор, достаточный по величине для исключения соприкосновения соседних чипов, уже зафиксированных на общем основании, при температурном расширении. Такие столбцы возможно формировать многопроходной печатью, например силоксановым полимером, с последующим его отверждением. В широком выборе распространены системы позиционирования-микродозирования-печати, работающие с жидкостями различной вязкости и позволяющие формировать описанные столбчатые структуры размером от 100 мкм и с точностью расположения до 5 мкм. Таким образом, можно, например, обеспечить соответствующий зазор в 100 мкм между совмещаемыми кремниевыми чипами фотоприемников. В том же случае, когда нужно обеспечить большую точность, наиболее пригоден метод формирования отвержденных структур в слое фотополимера, наносимого, в описываемом способе, на поверхность ВОП. Этот же фотополимер служит иммерсионно-клеевым слоем между ВОП и кремниевым чипом фотоприемника. Для выравнивания и поддерживания кремниевых чипов по плоскости ВОП служит другой тип микроструктур - матрица опорных полусфер (54), которая формируется в аналогичной микростолбикам (55) технологии, их размер, расположение на ВОП и форма, выбирается из принципа минимального механического контакта кремниевого чипа с поверхностью ВОП, и может быть оптимизированы для конкретного чипа и учитывающие особенности профиля чипа и его прогибы. Прототипом использования опорных полусфер является применение микросфер в технологии производства ЖК дисплеев, где микросферы обеспечивают равномерное взаимное дистанциирование стеклянных пластин.
Для осуществления точного перемещения фотоприемников, «плавающих» на жидком полимере (4), предлагается использование т.н. линейно-пространственного шагового двигателя, статор которого представляет собой матрицу электромагнитов с дифференцированным управлением фазами и токами в обмотках, а ротор - постоянные магниты, временно закрепляемые на обратной стороне фотоприемников.
Также возможны и другие методы перемещения фотоприемников во время процесса совмещения, например, с помощью микромеханических актуаторов.
Процесс перемещения фотоприемников возможно контролировать с помощью видеокамер большого увеличения, располагаемых под нижней стороной ВОП. Но, в любом случае, погрешности системы смещения фотоприемников компенсируются ограничением их хода движения при соприкосновении с разделительными рядами столбиков (55). Это означает, что система позиционирования/перемещения фотоприемников (линейный пространственный шаговый двигатель) должна иметь малые усилия сдвига объектов (фотоприемников) - в таком случае фотоприемник должен останавливаться при упоре в разделительный ряд и не двигаться далее даже при продолжении воздействия сил, его смещающих.
Количество, форма и взаиморасположение структурных элементов (54, 55) может быть любым, но достаточным для обеспечения постоянного малого зазора между ВОП (1) и кремниевым чипом фотоприемника (3) и в то же время ограничения движения чипов в процессе их перемещения и позиционирования.
После позиционирования всех фотоприемников или каждого фотоприемника по отдельности производится отверждение иммерсионно-клеевого слоя, по которому фотоприемник скользил при перемещении. Наиболее доступный и простой метод для этого - использование фотоотверждаемого полимера в качестве иммерсионно-клеевого слоя (4), который служит и антифрикционным слоем при совмещении фотоприемников. Аналогично могут быть использованы и эпоксидные клеевые, и гелеобразные полимерные композиции или термоотверждаемые композиции, если температура их отверждения не влияет значительным образом на работоспособность сборки после отверждения. Отверждение фотоотверждаемого полимера производится его экспонированием УФ-излучением, направляемым через нижнюю поверхность ВОП. Эпоксидные или силоксановые композиции отверждаются без дополнительных внешних воздействий через нормируемое время выдержки сборки в диапазоне заданных температур и времени (как правило, 12-28 ч при 20-40°С).
После отверждения иммерсионно-клеевого слоя (фотополимера или другой оптически прозрачной композиции) собранная матрица фотоприемников готова к эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СТРУКТУРИРОВАННОГО СЦИНТИЛЛЯТОРА НА ПОВЕРХНОСТИ ПИКСЕЛИРОВАННОГО ФОТОПРИЕМНИКА (ВАРИАНТЫ) И СЦИНТИЛЛЯЦИОННЫЙ ДЕТЕКТОР, ПОЛУЧЕНННЫЙ ДАННЫМ СПОСОБОМ (ВАРИАНТЫ) | 2013 |
|
RU2532645C1 |
| РЕНТГЕНОВСКИЙ ДЕТЕКТОР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2019 |
|
RU2726905C1 |
| МНОГОЭЛЕМЕНТНЫЙ ДЕТЕКТОР РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ, РЕДКОЗЕМЕЛЬНЫЙ РЕНТГЕНОЛЮМИНОФОР ДЛЯ НЕГО, СПОСОБ ФОРМИРОВАНИЯ МНОГОЭЛЕМЕНТНОГО СЦИНТИЛЛЯТОРА И ДЕТЕКТОРА В ЦЕЛОМ | 2009 |
|
RU2420763C2 |
| БЫСТРОДЕЙСТВУЮЩАЯ РЕНТГЕНОСЕНСОРНАЯ ПАНЕЛЬ ДЛЯ ЦИФРОВОЙ МАММОГРАФИИ | 2012 |
|
RU2524449C2 |
| МАТРИЧНЫЙ РЕНТГЕНОВСКИЙ ПРИЕМНИК ДЛЯ СКАНИРУЮЩЕГО РЕНТГЕНОВСКОГО АППАРАТА | 2010 |
|
RU2403593C1 |
| СКАНИРУЮЩИЙ МАЛОДОЗОВЫЙ РЕНТГЕНОГРАФИЧЕСКИЙ АППАРАТ | 2007 |
|
RU2347531C1 |
| ФОТОЭЛЕКТРОННОЕ УСТРОЙСТВО | 2011 |
|
RU2472250C1 |
| МАТРИЧНЫЙ РЕНТГЕНОВСКИЙ ПРИЕМНИК | 1996 |
|
RU2123710C1 |
| Способ юстировки сегментированного зеркала и устройство для его осуществления | 2019 |
|
RU2712780C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ПАПИЛЛЯРНОГО УЗОРА | 2006 |
|
RU2306602C1 |
Использование: для изготовления устройств рентгеновской маммографии и томосинтеза. Сущность изобретения заключается в том, что по меньшей мере один матричный фотоприемник контролируемо юстируют путем вращения и перемещения по жидкой фазе оптического полимера, предварительно нанесенного на по меньшей мере часть поверхности волоконно-оптической плиты, с последующей фиксацией отверждением указанного полимера. Технический результат: обеспечение возможности минимизировать вероятность повреждения чипа фотоприемника. 10 з.п. ф-лы, 6 ил.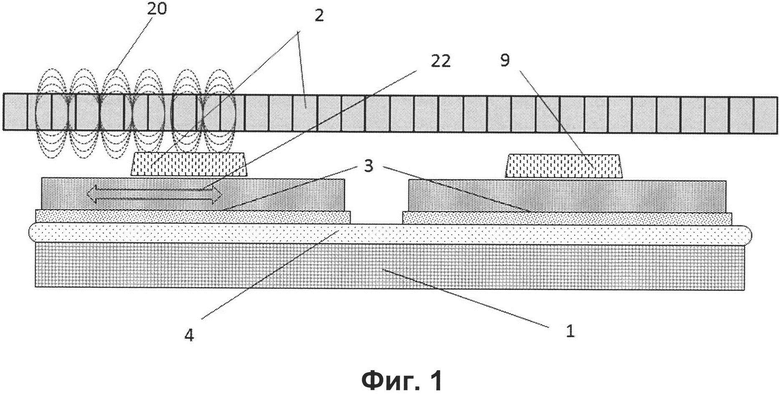
1. Способ монтажа многоэлементного матричного фотодетектора проникающих излучений, в котором по меньшей мере один матричный фотоприемник бесконтактно контролируемо юстируют, вращают и перемещают по жидкой фазе оптического полимера, предварительно нанесенного на по меньшей мере часть поверхности волоконно-оптической плиты, с последующей фиксацией отверждением указанного полимера.
2. Способ по п. 1, в котором на этапах юстировки, вращения и перемещения для предотвращения механического воздействия на матричный фотоприемник используется гидропланирование.
3. Способ по п. 1, в котором на этапе перемещения матричного фотоприемника его электронная схема может быть подключена к электронным блокам системы считывания информации.
4. Способ по п. 3, в котором на обратную сторону волоконно-оптической плиты проектируется по меньшей мере одно изображение тестового объекта, с целью точного текущего контроля положения матричного фотоприемника при монтаже.
5. Способ по п. 1, в котором на поверхности волоконно-оптической плиты предварительно формируют направляющие и ограничивающие движение матричного фотоприемника структурные элементы.
6. Способ по п. 5, в котором формирование указанных структурных элементов проводят методом 3D литографии в полимеризующихся жидкостях.
7. Способ по пп. 1 и 2, в котором на этапах юстировки, вращения и перемещения для предотвращения механического воздействия на матричный фотоприемник используют электромагнитные двигатели линейного позиционирования без механической связи ротора и статора.
8. Способ по п. 1, в котором в процессе перемещения матричного фотоприемника его положение контролируется по изображению на обратной стороне волоконно-оптической плиты.
9. Способ по п. 6, в котором сформированные структурные элементы направляют и ограничивают перемещение матричного фотоприемника не только в плоскости перемещения, но и в перпендикулярном указанной плоскости направлении.
10. Способ по п. 1, в котором в качестве матричного фотоприемника используют кремниевый бесподложечный чип.
11. Способ по п. 10, в котором контактные соединения и внешние схемы указанного кремниевого бесподложечного чипа устанавливают на указанную волоконно-оптическую плиту после монтажа.
| Устройство для автоматической удифферентовки судов и определения действующих на судно перерезывающих сил и изгибающих моментов | 1959 |
|
SU136639A1 |
| СПОСОБ СБОРКИ ИК-ФОТОПРИЕМНИКА | 2013 |
|
RU2526489C1 |
| МАТРИЧНЫЙ ФОТОПРИЕМНИК | 1987 |
|
SU1519470A1 |
| WO 2012145038 A1, 26.10.2012 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ МАТРИЧНОГО ФОТОПРИЕМНИКА (ВАРИАНТЫ) | 2011 |
|
RU2460174C1 |

