Область техники
Настоящее изобретение относится к механическому часовому механизму, снабженному устройством регулирования его хода, образованным резонатором, связанным со спуском. Под спуском в области производства часов следует понимать систему, образованную механизмом поддержания колебания резонатора и механизмом отсчета этого колебания для задавания ритма приводу индикации по меньшей мере одной временной величины. Резонатор и механизм поддержания его колебания образуют вместе генератор колебаний. Следует отметить, что, как правило, механизм поддержания и механизм отсчета образованы одним и тем же механизмом распределения энергии, поступающей от приводного устройства, который обеспечивает обе функции.
В частности, задачей настоящего изобретения является повышение добротности устройства регулирования с целью повышения точности хода механического часового механизма, в частности, улучшения изохронности генератора колебаний и уменьшения мощности, рассеиваемой устройством регулирования.
Уровень техники
Для повышения добротности устройства регулирования часового механизма ранее было предложено уменьшить трение воздуха на резонаторе.
Для уменьшения трения воздуха на резонаторе, в частности, на пружинном маятнике механического часового механизма, в документе FR 2054540 было предложено полностью разместить часовой механизм в воздухонепроницаемом корпусе, внутри которого давление понижают до значения ниже атмосферного давления, чтобы получить низкое давление в этом корпусе. Для регулирования частоты колебания пружинного маятника в этом документе предусмотрена система из двух биметаллических пластин, действующих на классический регулятор, когда одна или другая из этих пластин нагревается либо электрическим током, поступающим через электрические контакты в дне корпуса, либо световым пучком через стекло корпуса.
Во втором варианте выполнения с электронным часовым механизмом электромагнитный генератор колебаний предложено разместить в герметично закрытой камера, в которой находятся только этот генератор колебаний и его средства поддержания и регулирования. Колебание маятника поддерживают при помощи двух катушек, связанных с магнитами, установленными на этом маятнике. Регулирование активной длины пружины осуществляют аналогично предыдущему варианту при помощи электрического тока, подаваемого на биметаллические пластины. Как показано на фиг. 4 документа FR 2054540, генератор колебаний соединен с остальной частью электронного часового механизма только при помощи электрических соединений через стенку камеры. Следует отметить, что электрические соединения через герметичную камеру, не создают особых проблем.
Таким образом, в документе FR 2054540, опубликованном в 1971 году, было предложено размещать генератор колебаний в чистую герметичную камеру для электронного часового механизма, тогда как в механическом часовом механизме часовой механизм полностью располагают в герметичном корпусе и в этом корпусе часов понижают давление. Можно отметить, что в области производства часов это решение стало наиболее распространенным. Учитывая, что вариант выполнения, предложенный для электронного часового механизма, является относительно легким в изготовлении, в частности, для кварцевого резонатора, это решение стало основным для электронных часовых механизмов. С другой стороны, в случае механических часовых механизмов различные проблемы не позволили внедрить в промышленном масштабе механические часы, в которых часовой механизм находится в герметичном корпусе с пониженным давлением.
Во-первых, механические часы, как правило, содержат механические органы регулирования и/или приведения в действие различных функций, которые проходят через корпус, что усложняет конструкцию корпуса, чтобы он обеспечивал в течение длительного периода поддержание относительно стабильного пониженного давления. Затем, в случае послепродажного обслуживания, требующего открывания корпуса, необходимо располагать средствами, позволяющими опять удалить воздух из этого корпуса для получения заданного низкого давления. Кроме того, учитывая, что регулирование частоты резонатора зависит от окружающего давления, это регулирование создает проблемы при изготовлении. Решение, согласно которому при помощи биметаллических пластин воздействуют на регулятор путем подачи электрического тока или светового пучка через дно корпуса после установки в нем часового механизма и создания пониженного давления, создает проблему точности такого регулирования и проблему способа изготовления, так как после установки в корпус часового механизма необходимо производить индивидуальное регулирование каждых часов.
Недавно в документе WO 2013/084040 было предложено решить проблему регулирования пружинного маятника механических часов, в корпусе которых предусмотрено низкое давление для повышения добротности этого генератора колебаний. В этом документе предложено решение, согласно которому регулирование осуществляют при окружающем давлении и учитывают разность регулирования, измеряемую для хода при окружающем давлении и для хода при определенном пониженном давлении. Однако необходимо отметить, что этот документ остается в рамках концепции предыдущего документа, предлагая полностью поместить часовой механизм в корпус часов, внутри которого создают безвоздушное пространство для получения необходимого пониженного давления. Таким образом, если не считать того, что способ позволяет исключить специальное устройство в часах для регулирования их хода при низком давлении, все другие проблемы остаются.
Сущность изобретения
Задачей настоящего изобретения является устранение недостатков известных решений для часов, снабженных механическим часовым механизмом, в которых предусмотрено повышение добротности генератора колебаний за счет уменьшения трений, связанных с действующим на резонатор воздухом. Кроме того, настоящее изобретение призвано предложить механические часы, позволяющие сохранять камеру герметично закрытой во время обслуживания, в частности, когда необходимо заменить масло, классически предусмотренное на уровне подшипников различных подвижных элементов, или когда просто необходимо добавить некоторое количество масла для обеспечения нормальной смазки подвижных элементов механического часового механизма.
В связи с этим объектом настоящего изобретения является механический часовой механизм, содержащий резонатор, спуск, связанный с этим резонатором, и устройство индикации по меньшей мере одной временной величины, причем это устройство индикации приводится в движение механическим приводным устройством через зубчатое колесо отсчета, ритм хода которого задается спуском. По меньшей мере резонатор находится в герметично закрытой камере, в которой создается пониженное давление по отношению к атмосферному давлению. Согласно изобретению, спуск является магнитным спуском, содержащим анкерное колесо, связанное с резонатором напрямую или опосредовано через магнитную систему соединения. Эта магнитная система соединения включает в себя по меньшей мере первый магнитный элемент и второй магнитный элемент, по меньшей мере периодически вступающие между собой в магнитное взаимодействие. Герметично закрытая камера содержит стенку, которая проходит между первым и вторым магнитными элементами таким образом, что первый магнитный элемент находится внутри камеры, тогда как второй магнитный элемент и анкерное колесо находятся снаружи этой камеры, при этом стенка выполнена с возможностью обеспечения указанного магнитного взаимодействия через эту стенку.
Под магнитным спуском следует понимать спуск, в котором по меньшей мере два из его органов находятся между собой в бесконтактной магнитной связи.
Согласно частному варианту выполнения, механическое приводное устройство, зубчатое колесо отсчета и устройство индикации находятся за пределами герметично закрытой камеры, в которой создано пониженное давление. Таким образом, установку времени и различные другие установки функций механического часового механизма можно осуществлять классически через водонепроницаемый корпус, и они действуют на часть часового механизма, не находящуюся в камере с низким давлением.
Согласно предпочтительному варианту выполнения, механический часовой механизм не содержит в герметично закрытой камере никакого подвижного элемента, поворачивающегося с механическим трением в подшипниках. Таким образом, нет необходимости в использовании масла для ограничения механического трения и в обеспечении трения скольжения с масляной пленкой. Таким образом, во-первых, нет необходимости предусматривать замену масла в герметично закрытой камере. Затем нет никакого риска появления пыли в результате поворота подвижного элемента в отверстии механического подшипника. Кроме того, этот частный отличительный признак позволяет повысить точность хода часов, поскольку сводится к минимуму разность хода между различными возможными положениями часов. Наконец, такой вариант выполнения позволяет еще больше уменьшить мощность, необходимую для поддержания резонатора, и позволяет увеличить запас хода часов.
Другие частные отличительные признаки изобретения будут более очевидны из его нижеследующего подробного описания.
Краткое описание чертежей
Изобретение описано со ссылками на прилагаемые чертежи, которые представлены в качестве не ограничительных примеров и на которых:
Фиг. 1 - блок-схема первого общего варианта выполнения заявленного механического часового механизма;
фиг. 2 - блок-схема второго общего варианта выполнения заявленного механического часового механизма;
фиг. 3 - частичный вид сверху третьего частного варианта выполнения заявленного механического часового механизма;
фиг. 4 - вид в частичном разрезе по линии IV-IV часового механизма, показанного на фиг. 3;
фиг. 5 - частичный вид сверху четвертого частного варианта выполнения заявленного механического часового механизма;
фиг. 6 - вид в частичном разрезе по линии VI-VI часового механизма, показанного на фиг. 5;
фиг. 7 - частичный вид сверху пятого частного варианта выполнения заявленного механического часового механизма;
фиг. 8 - вид в частичном разрезе по линии VIII-VIII часового механизма, показанного на фиг. 7;
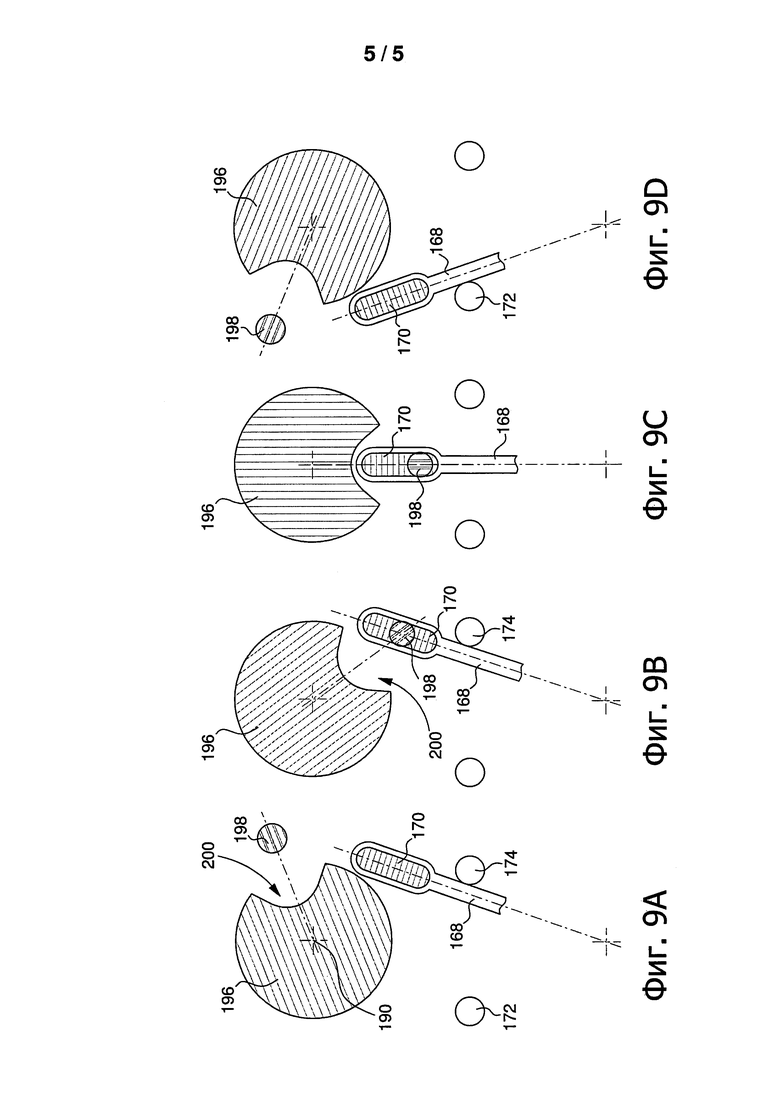
фиг. 9А, 9В, 9С и 9D - четыре последовательных положения магнитной системы соединения между маховиком маятника и арретиром, предусмотренным в пятом варианте выполнения.
Подробное описание изобретения
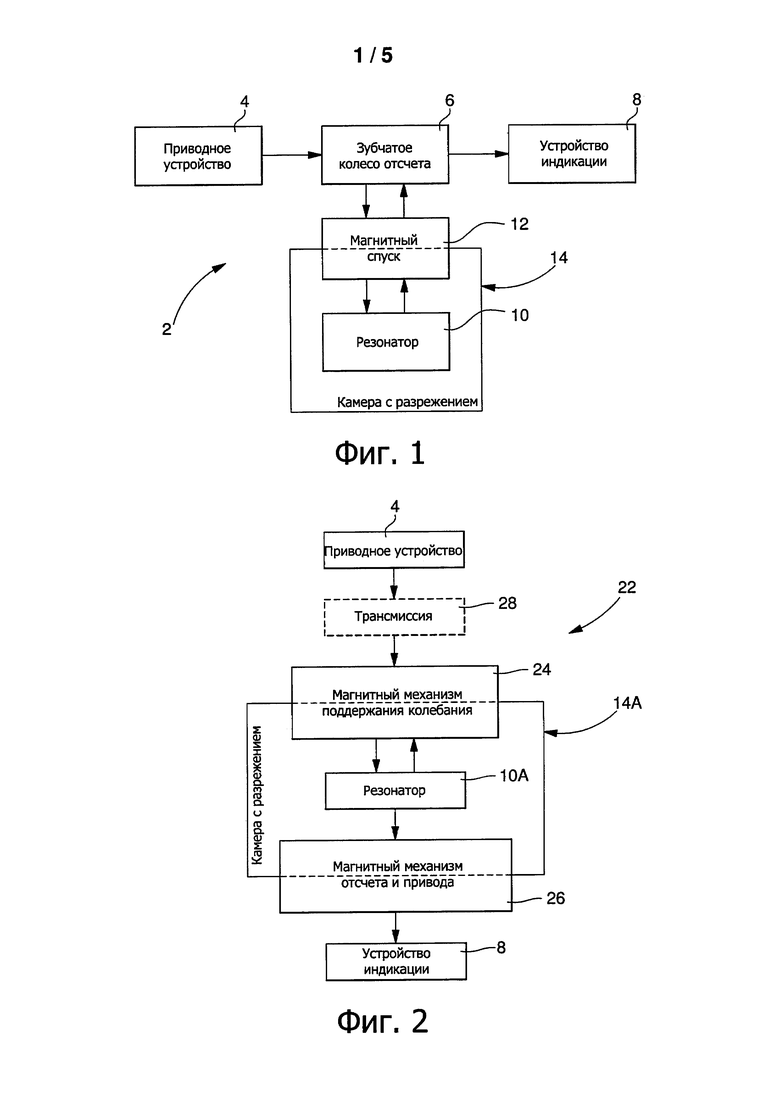
На фиг. 1 в виде блок-схемы схематично представлен первый общий вариант выполнения заявленного механического часового механизма. Этот часовой механизм 2 содержит механическое приводное устройство 4, например, барабан с ручным заводом или с автоматическом заводом, зубчатое колесо 6 отсчета, приводимое в движение приводным устройством, и аналоговое устройство 8 индикации по меньшей мере одной временной величины, приводимое в движение зубчатым колесом отсчета, что само по себе известно. Часовой механизм 2 содержит также устройство регулирования его хода, включающее в себя резонатор 10 и, согласно изобретению, магнитный спуск 12, содержащий магнитную систему бесконтактного соединения. Согласно изобретению, резонатор 10 и часть магнитного спуска расположены в герметично закрытой камере 14, где создано пониженное давление по отношению к атмосферному давлению. В этом первом общем варианте выполнения приводное устройство, зубчатое колесо отсчета и устройство индикации находятся за пределами камеры 14. Эта камера содержит стенку, которая проходит через магнитный спуск и, в частности, через его магнитную систему бесконтактного соединения, то есть между магнитными элементами этой системы, создающими упомянутое бесконтактное магнитное соединение и одновременно обеспечивающими работу магнитного спуска, то есть поддержание колебания резонатора 10 и отсчета его колебаний для задавания ритма зубчатому колесу отсчета. Согласно частному признаку, стенка камеры 14 является немагнитной по меньшей мере в зоне, где находится магнитная система.
На фиг. 2 в виде блок-схемы схематично представлен второй общий вариант выполнения заявленного механического часового механизма. Этот часовой механизм 22 тоже содержит механическое приводное устройство 4 и аналоговое устройство 8 индикации по меньшей мере одной временной величины. Этот второй общий вариант выполнения отличается от варианта, показанного на фиг. 1, тем, что магнитный механизм 24 поддержания колебания резонатора 10А и магнитный механизм 26 отсчета колебаний этого резонатора, образующие вместе часовой спуск, выполнены отдельно друг от друга. В данном случае магнитный механизм 26 имеет функцию приведения в движение устройства индикации, как и резонатор 10А. Этот вариант выполнения является особенным, так как резонатор и магнитный спуск включены в кинематическую цепь между приводным устройством и устройством индикации и, следовательно, служат не только для регулирования по меньшей мере одного зубчатого колеса отсчета. Факультативно, между приводным устройством 4 и магнитным механизмом 24 расположено трансмиссионное зубчатое колесо 28.
Следует отметить, что магнитный механизм поддержания колебания может быть по своей конструкции подобным магнитному спуску из первого варианта выполнения и, следовательно, может соответствовать, например, одному из описанных ниже частных вариантов выполнения. Это же замечание относится к магнитному механизму отсчета и приведения в движение. В частности, по меньшей мере один из этих двух магнитных механизмов содержит анкерное колесо, связанное напрямую или опосредованно с резонатором 10А через магнитную систему соединения. Эта магнитная система соединения включает в себя по меньшей мере первый магнитный элемент и второй магнитный элемент, которые по меньшей мере периодически вступают между собой в магнитное взаимодействие. Согласно изобретению, предусмотрена герметично закрытая камера 14А, которая содержит стенку, проходящую между первым и вторым магнитными элементами таким образом, что первый магнитный элемент находится внутри камеры, тогда как второй магнитный элемент и анкерное колесо находятся снаружи этой камеры. Стенка выполнена с возможностью обеспечения указанного магнитного взаимодействия через эту стенку.
В предпочтительном варианте оба магнитных механизма 24 и 26 являются механизмами одного типа и содержат, каждый, колесо. Колесо 24 механизма 24 передает энергию от приводного устройства на резонатор для поддержания его колебаний и, кроме того, для того, чтобы он, в свою очередь, приводил в движение механизм 26 и устройство 8 индикации. Колесо механизма 26 является колесом, образующим зубчатое колесо отсчета колебаний резонатора, причем это зубчатое колесо отсчета приводит в движение устройство индикации. Таким образом, в этом предпочтительном варианте два магнитных механизма 24 и 26 содержат, каждый, анкерное колесо, связанное напрямую или опосредованно с резонатором 10А через магнитную систему соединения, и камера 14А содержит первую стенку, которая проходит через первую магнитную систему бесконтактного соединения механизма 24, то есть между магнитными элементами этой первой системы, создающими бесконтактную магнитную связь, и вторую стенку, которая проходит через вторую магнитную систему бесконтактного соединения механизма 26, то есть между магнитными элементами этой второй системы, создающими бесконтактную магнитную связь. Поскольку несколько магнитных механизмов, образующих магнитные спуски, могут иметь реверсивную работу при условии определенной адаптации, специалисту понятно, что конкретные версии выполнения, представленные ниже для первого общего варианта выполнения в качестве не ограничительных примеров, можно также применить для одного или другого из двух механизмов 24 и 26, образующих магнитный спуск из второго общего варианта выполнения. В первом варианте работы энергия передается от анкерного колеса на резонатор, а во втором варианте работы энергия передается от резонатора на анкерное колесо. Часто в механизм необходимо ввести асимметрию, чтобы определить направление вращения. Так, например, лопатки и зубья устройств с ведущим анкером слегка отличаются от лопаток и зубьев классического спуска. Специалист сможет учитывать эти различия при выполнении магнитного механизма отсчета колебаний резонатора и привода устройства индикации.
Далее со ссылками на фиг. 3 и 4 следует описание третьего варианта выполнения заявленного часового механизма. Механический часовой механизм 32 показан на фигурах только частично, чтобы выделить отличительные признаки изобретения, относящиеся к устройству регулирования этого часового механизма. Этот третий вариант выполнения, а также описанные ниже другие варианты выполнения, являются частными версиями описанного выше первого общего варианта выполнения. Кроме колеса или шестеренки, служащей для механической связи между анкерным колесом и приводным устройством и зубчатым колесом отсчета, это приводное устройство и это зубчатое колесо отсчета, а также устройство индикации на фигурах не показаны и подробно не описаны, так как они известны специалисту в данной области. Действительно, настоящее изобретение отличается тем, что эти части механического часового механизма и связанные с ними устройства, в частности, устройство завода, устройство коррекции временных величин и другие устройства управления, например, для хронографа, хорошо известны. Разумеется, специалист может выбрать зубчатое колесо отсчета, соответствующее частоте колебания резонатора, и может легко предусмотреть различные пространственные расположения различных частей часового механизма, включающего в себя устройство регулирования в соответствии с изобретением с резонатором и частью спуска, расположенными в герметично закрытой камере.
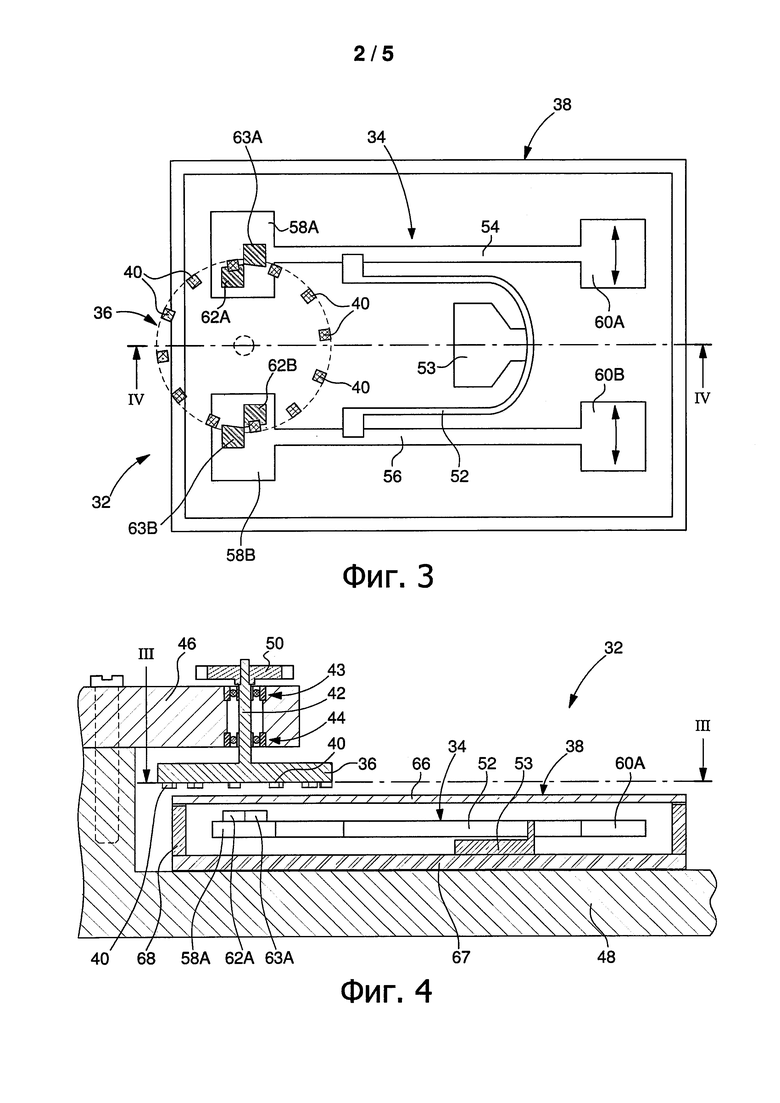
Устройство регулирования хода часового механизма 32 содержит резонатор 34 и анкерное колесо 36, имеющее прямую магнитную связь с резонатором. Этот резонатор расположен в герметично закрытой камере 38, в которой создано пониженное давление относительно атмосферного давления, тогда как анкерное колесо находится за пределами этой камеры. Предпочтительно пониженное давление меньше или по существу равно одному миллибару (1 миллибар). В предпочтительном варианте в камере предусмотрена газовая ловушка, называемая также геттером, для улавливания остаточных газов после герметичного закрывания этой камеры. Такое устройство позволяет еще больше понизить давление внутри камеры и отслеживать, чтобы эта камера не имела утечек и не теряла свою воздухонепроницаемость после определенного периода. Анкерное колесо закреплено на первом конце вала 42, установленного в двойном шарикоподшипнике 42, 44, который обеспечивает направление этого вала и обеспечивает стабильное вращение колеса 36 вокруг определенной оси вращения. Этот двойной шарикоподшипник установлен в мосту 46, который прочно закреплен при помощи по меньшей мере одного винта на пластине 48, на поверхности которой находится камера 38. На втором конце вала 42 закреплено колесико 50. Это колесико 50 служит для обеспечения соединения устройства регулирования с барабаном и зубчатым колесом отсчета часового механизма. Следует отметить, что это колесико представляет собой шестеренку, зацепляющуюся с подвижным элементом кинематической цепи между барабаном и устройством индикации. Анкерное колесо 36 содержит множество закрепленных на нем магнитов 40, направление намагниченности которых параллельно оси вращения этого колеса. Это множество магнитов образует магнитные элементы первой части магнитной системы соединения между этим колесом и резонатором, и эта система образует магнитный спуск.
Резонатор 34 образован камертоном 52, который установлен своим центром на цоколе 53 и на конце двух ветвей которого соответственно закреплены две планки 54 и 56. На своем первом конце каждая планка содержит пластинку 58А, соответственно 58В, на которых закреплены два магнита большего размера 62А и 63А, соответственно 62В и 63В, образующие магнитные элементы второй части магнитной системы соединения, образующей магнитный спуск. Направление намагниченности этих магнитов тоже параллельно оси вращения колеса 36. Кроме того, каждая планка содержит противовес 60А, соответственно 60В, которые служат для балансировки резонатора 34 и, в случае необходимости, для компенсации магнитных сил магнитной системы соединения. Только резонатор 34 находится в камере 38, которая содержит немагнитную стенку 66, в частности, кристаллическую пластинку, которая проходит между магнитами 40 анкерного колеса и магнитами 62А, 63А, 62В, 63В, закрепленными на резонаторе. Толщину этой пластинки 66 предусматривают как можно меньшей, чтобы расстояние между магнитами 40 и магнитами, установленными на резонаторе, было тоже минимальным для обеспечения достаточно сильного магнитного взаимодействия между первой и второй частями магнитной системы соединения магнитного спуска. Камера 38 образована пластинкой 67, на которой закреплен цоколь 53 резонатора, боковой стенкой 68, выполненной заодно с пластинкой 67 или герметично с ней соединенной, и стенкой 68, образующей крышку, которую крепят при помощи клея или посредством сварки при помощи известного средства на боковой стенке. Безвоздушное пространство в этой камере создают при помощи известных специалисту средств, в частности, закрыв крышку в камере с пониженным давлением или через отверстие, выполненное в боковой стенке камеры и затем закрываемое герметично. Следует отметить, что можно предусмотреть различные варианты выполнения камеры. В частности, стенка 66 может иметь небольшую толщину только в области, расположенной над колесом 36. Кроме того, для повышения жесткости камеры между дном 67 и крышкой 66 камеры, в частности, между двумя ветвями камертона можно предусмотреть распорки.
Далее следует подробное описание работы магнитного спуска согласно этому третьему варианту выполнения. Специалист может найти подробные пояснения, а также усовершенствованные варианты выполнения такого магнитного спуска в европейской патентной заявке ЕР 1416816 или в патентной заявке, в которой заявлен приоритет этой европейской заявки. В целом, приводное устройство передает момент сил на анкерное колесо 36 через колесико-шестеренку 50 для приведения во вращение этого анкерного колеса. Магниты выполнены и расположены таким образом, чтобы вращение колеса 36 возбуждало резонатор и чтобы ветви камертона начали вибрировать, а пластинки 58А и 58В начали колебаться. В варианте магнитного отталкивания магнитное взаимодействие предусмотрено таким образом, чтобы магнитная система соединения периодически накапливала потенциальную магнитную энергию, по меньшей мере большую часть которой она отдает на резонатор в каждом периоде, когда магнит 40 выходит в радиальном направлении из намагниченных зон 62А, 63А, 62В или 63В, причем эти намагниченные зоны совершают возвратно-поступательное движение по существу в радиальном направлении анкерного колеса. Таким образом поддерживается колебание резонатора. Кроме того, в определенном диапазоне момента сил магнитная система соединения обеспечивает синхронизацию между частотой колебания резонатора и угловой скоростью анкерного колеса. В основной версии пластинка 58А, соответственно 58В, совершает период колебания, тогда как колесо совершает вращение с угловым периодом, определяемым угловыми расстоянием между центрами двух смежных магнитов 40. Необходимо отметить, что в версии выполнения магнитной системы соединения магниты 40 или магниты, установленные на резонаторе, можно заменить элементами из ферромагнитного материала. В другой версии магниты расположены с обеспечением магнитного притяжения.
В частной версии предусмотрен другой тип резонатора, содержащего маятник с валом, по меньшей мере частично выполненным из магнитного материала и поворачивающимся по существу без механического трения между двумя магнитными опорными подшипниками. Эта версия выполнения будет представлена ниже. В другой частной версии резонатор образован маховиком маятника и гибкими пластинками, которые соединяют этот маховик с камерой, причем эти гибкие пластинки выполнены таким образом, чтобы маятник совершал колебание с определенной частотой. Эта версия выполнения тоже будет изложена ниже.
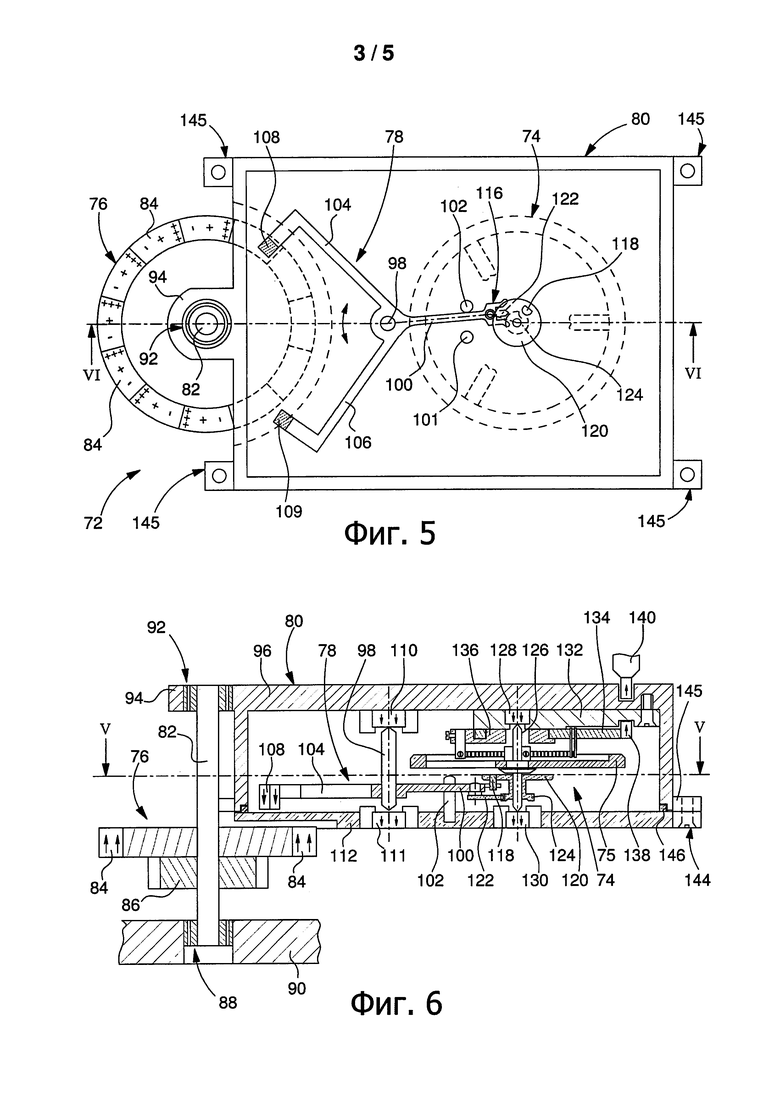
Далее со ссылками на фиг. 5 и 6 следует описание четвертого варианта выполнения заявленного часового механизма. Механический часовой механизм 72 содержит резонатор 74 и анкерное колесо 76, которые связаны через промежуточный орган 78, не соединенный неподвижно с резонатором или с анкерным колесом и колеблющийся синхронно с резонатором. Первая часть промежуточного органа напрямую связана с резонатором, и вторая часть, отличная от первой части, напрямую связана с анкерным колесом. В этом третьем варианте выполнения магнитная система соединения магнитного спуска предусмотрена между второй частью промежуточного органа и анкерным колесом. Резонатор 74 и промежуточный орган 78 находятся внутри герметично закрытой камеры 80. В варианте, показанном на фиг. 5 и 6, резонатор выполнен в виде классического пружинного маятника, но со специальными средствами регулирования, адаптированными для изобретения, и промежуточный орган образует бистабильный арретир.
Анкерное колесо 76 содержит намагниченное периферическое кольцо, образующее множество намагниченных зон 84. Это множество намагниченных зон определяет угловой магнитный период и образует первую часть магнитной системы соединения магнитного спуска часового механизма 72. Колесо 76 жестко установлено на валу 82, два конца которого соответственно заходят в два шарикоподшипника 88 и 92, которые соответственно установлены в пластине 90 и в пластинке 94, выступающих из камеры 80 на уровне ее дна 96. На валу 82 жестко установлена также анкерная шестеренка 86, которая служит для механического соединения с приводным устройством и с зубчатым колесом отсчета часового механизма. Промежуточный орган 78 образует анкер, сходный во своей работе с швейцарским анкерным спуском, однако связь между анкером и анкерным колесом в данном случае является магнитной. Анкер установлен на валу 98 и содержит, с одной стороны, рейку 100, заканчивающуюся вилкой 116 и острием 122, и, с другой стороны, два плеча 104 и 106, на соответствующих концах которых установлены два магнита 108 и 109, которые образуют вторую часть магнитной системы соединения магнитного; спуска. Анкер колеблется между двумя стабильными положениями, ограниченными двумя штифтами 101 и 102.
Хотя спуск является спуском магнитного типа, и анкер имеет магнитную связь с анкерным колесом, образованным намагниченной кольцевой конструкцией, этот вариант выполнения отличается тем, что механическое соединение между анкером 78 и маятником 75 резонатора идентично механическому соединению классического швейцарского анкерного спуска. Так, на своем валу 126 маятник содержит большую пластину 120, на которой закреплена чека 118, называемая также эллипсом, и малую пластину, содержащую вырез для острия 122. Эта магнитная система соединения позволяет, с одной стороны, поддерживать колебания пружинного маятника и, с другой стороны, сообщает анкеру прерывистое возвратно-поступательное движение между его двумя стабильными положениями, и это движение определяет колебание, которое является синхронным с колебанием пружинного маятника. Колебательное движение анкера позволяет двум магнитам поочередно вступать в магнитную связь с намагниченным зонами 84 анкерного колеса 76. Предпочтительно каждая намагниченная зона 84 предусмотрена с угловой магнитной рампой, выполненной из намагниченного материала, создающего магнитный поток, который увеличивается в угловом направлении, что показано на фигурах в виде знака «-», за которым следует знак «+». За этой магнитной рампой предусмотрен барьер магнитного потенциала, показанный в виде знака «+++», который служит для остановки в угловом направлении вращения колеса 76, благодаря магнитной системе соединения. Этот барьер потенциала образует, таким образом, магнитный ограничитель. Его создает магнит, генерирующий магнитное поле с более сильной напряженностью, достаточное, чтобы каждый результирующий момент, действующий на анкерное колесо, превышал момент, передаваемый на анкерное колесо от приводного устройства. В варианте каждая зона 84 может быть образована тремя смежными магнитами, напряженность намагниченности которых увеличивается по часовой стрелке от одного магнита к следующему. В другом варианте имеется только два магнита на каждую зону, при этом первая часть каждой зоны, обозначенная знаком «-», не содержит намагниченного материала.
Что касается работы этого магнитного спуска в конфигурации, представленной на фиг. 5, магнит 108, установленный на плече 104, упирается в магнитный барьер зоны 84 кольцевой магнитной дорожки, тогда как магнит 109, установленный на другом плече, находится за пределами этой кольцевой магнитной дорожки, то есть не расположен над ней и по существу с ней не взаимодействует. Затем, когда маятник 75 входит в следующий цикл и поворачивается против часовой стрелки, чека заходит в вилку 116 и увлекает анкер в направлении штифта 101 (ситуация показана на фиг. 6). В результате этого перемещения анкера резонатором, магнит 108 покидает кольцевую магнитную дорожку, тогда как магнит 109 располагается над этой дорожкой в не намагниченной или слабо намагниченной части зоны 84. Это создает момент сил, действующий на анкер в направлении его движения, и вилка 116 действует на резонатор импульсом, поддерживающим его колебание. После этого колесо 76 поворачивается, пока магнит 109 не придет в положение упора в барьер магнитного потенциала зоны 84, в которую он вошел. Во время следующего цикла маятника это явление повторяется, при этом магниты 108 и 109 меняются ролями, и так далее. Таким образом, понятно, что колесо 76 вращается скачкообразно с угловой скоростью и, следовательно, с частотой, синхронной с частотой колебания пружинного маятника 74. Следует отметить, что описанная выше кинематическая работа магнитного спуска подобна работе обычного швейцарского анкерного спуска. Специалист может найти дополнительные пояснения, а также частные варианты выполнения такого магнитного спуска в европейской заявке ЕР 13199427 или в патентной заявке, в которой заявлен приоритет этой европейской заявки.
Пружинный маятник и анкер расположены в камере 80 с пониженным давлением относительно атмосферного давления. Эта камера закрыта немагнитной пластинкой 12, например, из прозрачного кристалла. В области расположения друг над другом анкерного колеса и анкера 78 пластинка выполнена более тонкой, чтобы максимально сократить расстояние между магнитами анкера и намагниченными зонами анкерного колеса, между которыми, согласно изобретению, проходит эта пластинка, образующая стенку герметично закрытой камеры. В представленном варианте пластинка 112 образует крышку, которая крепится на корпусе, в котором расположены резонатор, средства регулирования его частоты и анкер, при помощи винтов, жестко соединяющих выступающие части 144 и 145 соответственно крышки и корпуса. Для обеспечения воздухонепроницаемого закрывания предусмотрена прокладка 146. Корпус выполнен, например, из латуни. В варианте все стенки камеры являются прозрачными.
Для регулирования частоты колебания пружинного маятника предусмотрено устройство, похожее на классическое устройство с регулятором 134, установленным на держателе 136 колонки волосковой пружины, но адаптированным для изобретения таким образом, что мост 132 (мост маятника) расположен над этим регулятором и над держателем относительно пружинного маятника в отличие от обычной конструкции и что регулятор расположен над держателем колонки волосковой пружины, что требует более длинных штифтов, чем в классическом выполнении. Установку этих двух органов на мосту осуществляют аналогично классическому варианту выполнения, и мост может быть закреплен на дне камеры 80, в частности, при помощи по меньшей мере одного винта. Для обеспечения регулирования активной длины пружины после закрывания камеры и по меньшей мере частичного разрежения воздуха на своем конце регулятор содержит магнит 138. При помощи инструмента 140, на конце которого установлен магнит, выполненный с возможностью притяжения магнита 138, за счет магнитной связи можно изменять угловое положение регулятора. Для облегчения этой операции, в частности, если дно 96 не является прозрачным, в дне 96 камеры предусмотрен паз. Следует отметить, что для регулирования частоты колебания резонатора можно предусмотреть альтернативные варианты. Например, можно предусмотреть маятник с первоначально слишком большой инерцией и затем уменьшать эту инерцию путем удаления материала при помощи лазерного пучка через стенку камеры, которая выполнена прозрачной для длины волны этого лазера. Однако недостатком этого простого решения является то, что оно не позволяет опять немного уменьшить частоту колебания после осуществления первого регулирования.
Согласно предпочтительному варианту, в камере 80 не находится ни одного поворотного подвижного элемента с механическим трением в подшипниках. Это позволяет отказаться от любой смазки в этой камере. В представленном варианте вал 126 маятника 75 по меньшей мере частично выполнен из магнитного материала и поворачивается по существу без механического трения между двумя схематично показанными магнитными подшипниками 128 и 130. Точно так же, вал 98 промежуточного органа 78 по меньшей мере частично выполнен из магнитного материала и поворачивается по существу без механического трения между двумя тоже схематично показанными магнитными подшипниками 110 и 111. Специалист может обратиться к ряду документов, относящихся к магнитным подшипникам, которые можно применять в области производства часов. В частности, можно указать патентную заявку WO 2012/062524 и документы, указанные в отчете о поиске, прилагаемом к этой заявке. Следует отметить, что магнитные подшипники 111 и 130 расположены в отверстиях, выполненных в пластинке 112, обеспечивая воздухонепроницаемое закрывание. Однако в варианте эти магнитные подшипники могут быть расположены на внутренней поверхности пластинки 112, как магнитные подшипники 110 и 128. В этом случае магниты выполнены удлиненными, или плечи анкера имеют, каждый, уступ или колено, позволяющее расположить магниты 108 и 109 на более низком уровне. Такое расположение позволяет также продолжить валы 98 и 126 со стороны пластинки 112.
Согласно альтернативному варианту, резонатор образован маховиком маятника и гибкими пластинками, которые соединяют этот маховик с камерой, причем эти гибкие пластинки выполнены с возможностью обеспечения колебания маятника с определенной частотой. Ниже представлен пример выполнения, который можно адаптировать для этого четвертого варианта выполнения. Точно так же, в альтернативной версии промежуточный орган соединен с камерой гибкими пластинками, причем эти гибкие пластинки выполнены с возможностью обеспечения синхронного колебания этого промежуточного органа с резонатором. Эти альтернативные решения позволяют расположить в камере подвижные элементы без поворотного вала. Это позволяет избегать любого износа или старения смазочного масла и, следовательно, открывания герметично закрытой камеры во время обслуживания часового механизма. Устраняется также проблема заводских и монтажных допусков, связанных с магнитными подшипниками.
Версия четвертого варианта выполнения, показанная на фиг. 5 и 6, отличается тем, что часовой механизм 72 включает в себя большинство традиционных часовых компонентов и элементов и одновременно содержит магнитную систему бесконтактного соединения между анкером и анкерным колесом, что позволяет расположить стенку 112 герметично закрытой камеры 80 между первой и второй частями этой магнитной системы соединения магнитного спуска.
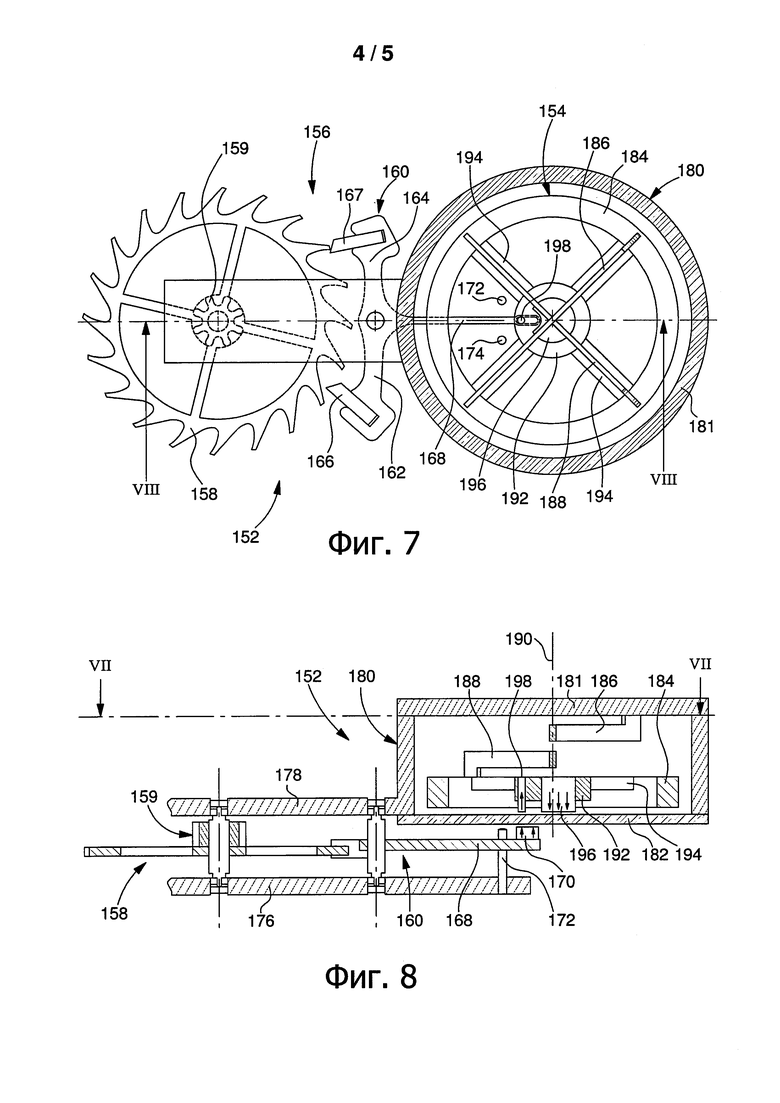
Далее со ссылками на фиг. 7, 8 и 9A-9D следует описание пятого варианта выполнения заявленного часового механизма. Механический часовой механизм 152 содержит показанные на фигурах резонатор 152 и магнитный спуск 154. Как и в четвертом варианте выполнения, этот магнитный спуск содержит анкерное колесо 158, которое связано с резонатором через промежуточный орган 160, выполненный в виде анкера, образующего бистабильный арретир. Вместе с тем, этот пятый вариант выполнения отличается от предыдущего варианта тем, что магнитная система соединения предусмотрена между анкером 160 и резонатором и что этот анкер находится за пределами камеры 180, которая закрыта герметично и содержит резонатор. Таким образом, анкерное колесо и анкер установлены на двух соответствующих валах, которые поворачиваются в обычных механических подшипниках между пластиной 176 и мостом 178, который выполнен заодно с корпусом 181. В варианте мост 178 представляет собой элемент, выполненный отдельно от камеры. В другом варианте анкер имеет поворотный магнитный вал между двумя магнитными подшипниками для уменьшения трений на этом анкере. Классически на валу анкерного колеса установлена анкерная шестеренка 159.
Резонатор образован маховиком 184 маятника и гибкими пластинками 186 и 188, закрепленными на этом маховике, причем эти гибкие пластинки выполнены с возможностью обеспечения колебания маятника по существу вокруг геометрической оси 190 с определенной частотой. В представленном варианте эти гибкие пластинки расположены в виде креста, то есть смещены на 90°. Каждая гибкая пластинка закреплена первым концом на дне корпуса 181, образующего герметично закрытую камеру, и вторым концом, диаметрально противоположным первому концу, на маховике 184 маятника. Таким образом, маятник не поворачивается, и в камере 190 не предусмотрено подшипников. Регулирование частоты колебания такого резонатора можно осуществлять на уровне гибких пластинок посредством термической обработки или снятия материала при помощи лазерного пучка и на уровне инерции маховика маятника тоже посредством снятия материала при помощи лазера. Следует отметить, что предусмотрено по меньшей мере одно окончательное регулирование после герметичного воздухонепроницаемого закрывания камеры 180 с пониженным давлением.
Как и в предыдущем варианте выполнения, этот пятый вариант выполнения отличается тем, что магнитный спуск частично идентичен классическому швейцарскому анкерному спуску, и тем, что магнитная система соединения, позволяющая применить изобретение, выполнена таким образом, чтобы кинематическая работа этого магнитного спуска была аналогичной работе швейцарского анкерного спуска. Так, анкерное колесо является классическим, и оба плеча 162 и 164 анкера, на которых установлены соответственно две пластины 166 и 167, механически связанные с этим анкерным колесом, тоже являются классическими. В представленном варианте магнитная система соединения между анкером и маховиком 184 маятника выполнена с возможностью управления анкером 160 через маятник и создания импульсов поддержания колебания этого маятника аналогично швейцарскому анкерному спуску, как было описано выше в связи с четвертым вариантом выполнения. Для этого анкер содержит рейку 169, на конце которой установлен вытянутый магнит 170, находящийся снаружи камеры 180 напротив немагнитной стенки 182 этой камеры. Этот вытянутый магнит образует первую часть магнитной системы соединения. Он выполняет две функции анкера и заменяет вилку и острие классического анкера. Маховик 184 маятника содержит в своем центре диск 192, соединенный с маховиком четырьмя стойками 194, и содержит вторую часть магнитной системы соединения, находящуюся внутри камеры. Эта вторая часть содержит магнитную чеку 198, образованную магнитом, выполненным с возможностью притяжения магнита анкера и вставленным в отверстие диска 192, который соответствует большой пластине классического спуска, и центральный намагниченный диск 196, выполненный с возможностью отталкивания магнита анкера и имеющий вырез 200. Этот центральный намагниченный диск заменяет малую пластину классического спуска.
На фиг. 9A-9D показана работа магнитной системы соединения. Эта система выполнена с возможностью обеспечения колебания анкера синхронно с резонатором между двумя стабильными положения остановки этого анкера, в которых он удерживается поочередно во время части каждого цикла колебания резонатора. Эти два стабильных положения остановки определены двумя штифтами 172 и 174, которые ограничивают угловой ход рейки 168 и на которые эта рейка поочередно опирается в течение определенного интервала времени в каждом цикле маятника под действием отталкивания намагниченного диска 196. На фиг. 9А показан анкер в первом стабильном положении, в котором он моментально останавливается, и маятник находится близко к своей максимальной амплитуде. Магнитная чека 198 и вырез 200 в центральном намагниченном диске 196 находятся в угловом направлении за пределами зоны связи с вытянутым магнитом 170, закрепленным на рейке 168 анкера. Рейка удерживается прижатой к штифту 174 магнитной силой, связанной с магнитным взаимодействием между намагниченным диском и намагниченной чекой, которые установлены с возможностью магнитного отталкивания. Когда маховик маятника поворачивается в направлении своего положения покоя, соответствующего на фиг. 9A-9D половине вертикальной оси, отходящей от оси вращения 90 вниз, намагниченная чека сначала притягивается магнитом 170 до положения, показанного на фиг. 9В, в котором вырез 200 находится напротив этого магнита 170. В первом периоде рабочей магнитной связи маятник продолжает свое вращение по существу до положения, показанного на фиг. 9С, увлекая за собой магнит 170, который частично заходит в вырез. Это приводит к повороту анкера и к отходу пластинки, в которую упирался зуб анкерного колеса. Этот зуб классически создает момент, действующий на анкер, и магнит 170 увлекается во вращении анкерным колесом. При этом во втором периоде рабочей магнитной связи магнит 170 становится ведущим элементом во взаимодействии между этим магнитом и намагниченной чекой, что позволяет получить импульс подержания колебания маятника, который затем продолжает свое вращение до максимальной амплитуды, соответствующей примерно положению на фиг. 9D, тогда как рейка 168 остается в положении опоры на штифт 172. Такое же взаимодействие происходит в каждом цикле колебания резонатора 154.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический часовой механизм с системой обратной связи | 2016 |
|
RU2718348C2 |
| ЧАСОВОЙ РЕГУЛИРУЮЩИЙ МЕХАНИЗМ С ОПТИМИЗИРОВАННЫМ МАГНИТНЫМ СПУСКОМ | 2017 |
|
RU2721618C2 |
| МЕХАНИЗМ СИНХРОНИЗАЦИИ ЧАСОВ | 2014 |
|
RU2629168C1 |
| ЕСТЕСТВЕННЫЙ СПУСКОВОЙ МЕХАНИЗМ | 2014 |
|
RU2660530C2 |
| ОПТИМИЗИРОВАННЫЙ СПУСКОВОЙ МЕХАНИЗМ | 2014 |
|
RU2665845C2 |
| БЕСКОНТАКТНЫЙ ЦИЛИНДРИЧЕСКИЙ СПУСКОВОЙ МЕХАНИЗМ ДЛЯ ЧАСОВ | 2014 |
|
RU2666451C2 |
| АНКЕРНОЕ УСТРОЙСТВО ДЛЯ ЧАСОВОГО СПУСКА | 2013 |
|
RU2603954C1 |
| РЕГУЛЯТОР СКОРОСТИ ВРАЩЕНИЯ УЗЛА КОЛЕСА ЧАСОВОГО ИЛИ УДАРНОГО МЕХАНИЗМА | 2012 |
|
RU2578986C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛОВОЙ СКОРОСТИ КОЛЕСНОГО УЗЛА В ЧАСОВОМ МЕХАНИЗМЕ, ВКЛЮЧАЮЩЕМ МАГНИТНЫЙ СПУСКОВОЙ МЕХАНИЗМ | 2014 |
|
RU2670236C2 |
| ОПТИМИЗИРОВАННЫЙ ЧАСОВОЙ МЕХАНИЗМ | 2017 |
|
RU2743149C2 |
Механический часовой механизм (2), содержащий резонатор (10), спуск, связанный с этим резонатором, и устройство (8) индикации по меньшей мере одной временной величины, причем это устройство индикации приводится в движение механическим приводным устройством (4) через зубчатое колесо (6) отсчета, ритм хода которого задается спуском, при этом по меньшей мере указанный резонатор находится в камере (14), в которой создается пониженное давление по отношению к атмосферному давлению. Спуск является магнитным спуском (12), содержащим анкерное колесо, связанное с резонатором напрямую или опосредовано через магнитную систему соединения, причем эта магнитная система соединения выполнена таким образом, что немагнитная стенка камеры проходит через магнитный спуск, при этом первая часть этого спуска находится внутри камеры, тогда как вторая часть этого спуска находится снаружи этой камеры. 33 з.п. ф-лы, 12 ил.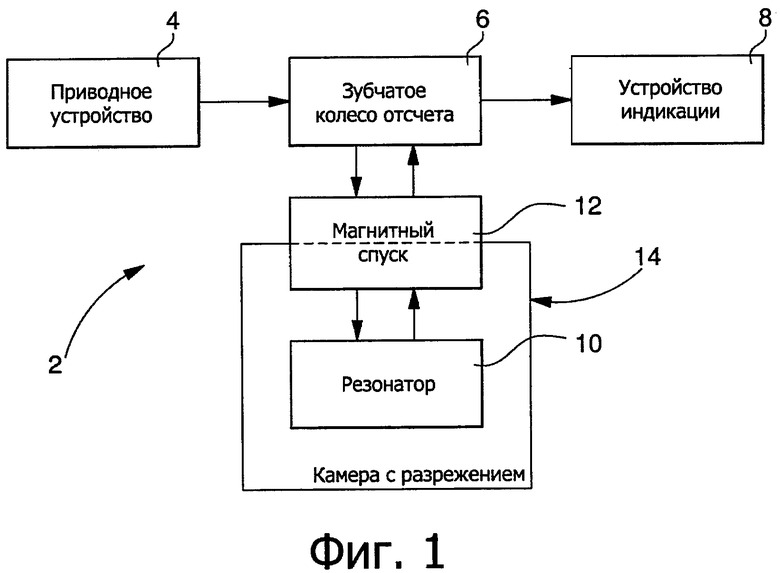
1. Механический часовой механизм (2; 22; 32; 72; 152), содержащий резонатор (10; 10А; 34; 74; 154), спуск, связанный с этим резонатором, и устройство индикации по меньшей мере одной временной величины, которое приводится в движение механическим приводным устройством через зубчатое колесо отсчета, ритм хода которого задается спуском, при этом по меньшей мере указанный резонатор находится в камере (14; 14А; 38; 80; 180), в которой создается пониженное давление по отношению к атмосферному давлению,
отличающийся тем, что
указанный спуск является магнитным спуском, содержащим анкерное колесо (36; 76; 158), связанное с резонатором напрямую или опосредовано через магнитную систему соединения, которая включает в себя по меньшей мере первый магнитный элемент (62А, 63А, 62В, 63В; 108, 109; 196, 198) и второй магнитный элемент (40; 84; 170), по меньшей мере периодически вступающие между собой в магнитное взаимодействие,
указанная камера содержит стенку (66; 112; 182), которая проходит между указанными первым и вторым магнитными элементами так, что первый магнитный элемент находится внутри камеры, а второй магнитный элемент и анкерное колесо находятся снаружи этой камеры, при этом указанная стенка выполнена с возможностью обеспечения указанного магнитного взаимодействия через эту стенку.
2. Механический часовой механизм по п. 1, отличающийся тем, что стенка камеры является немагнитной по меньшей мере в области, где находится магнитная система.
3. Механический часовой механизм по п. 1 или 2, отличающийся тем, что механическое приводное устройство, зубчатое колесо отсчета и устройство индикации находятся за пределами указанной камеры.
4. Механический часовой механизм по п. 3, отличающийся тем, что резонатор (34) напрямую связан с анкерным колесом (36), на котором установлен второй магнитный элемент, при этом на резонаторе установлен первый магнитный элемент.
5. Механический часовой механизм по п. 4, отличающийся тем, что резонатор (34) является резонатором с камертоном.
6. Механический часовой механизм по п. 4, отличающийся тем, что указанный резонатор содержит маятник с валом, по меньшей мере частично выполненным из магнитного материала и поворачивающимся по существу без механического трения между двумя магнитными подшипниками.
7. Механический часовой механизм по п. 4, отличающийся тем, что указанный резонатор образован маховиком маятника и гибкими пластинками, которые соединяют этот маховик с указанной камерой, причем эти гибкие пластинки выполнены с возможностью обеспечения колебания резонатора с определенной частотой.
8. Механический часовой механизм по п. 3, отличающийся тем, что указанный резонатор и указанное анкерное колесо связаны через промежуточный орган (78; 160), не соединенный неподвижно с резонатором или с анкерным колесом и колеблющийся синхронно с резонатором, причем этот промежуточный орган содержит первую часть (116, 122; 170), напрямую связанную с резонатором, и вторую часть (108, 109; 166, 167), отличную от первой части, напрямую связанную с анкерным колесом.
9. Механический часовой механизм по п. 8, отличающийся тем, что указанный промежуточный орган образует арретир.
10. Механический часовой механизм по п. 8 или 9, отличающийся тем, что указанная магнитная система соединения предусмотрена между указанной второй частью промежуточного органа и анкерным колесом, и тем, что указанный промежуточный орган расположен внутри указанной камеры.
11. Механический часовой механизм по п. 8, отличающийся тем, что указанная магнитная система соединения предусмотрена между указанной первой частью промежуточного органа и резонатором, и тем, что указанный промежуточный орган расположен за пределами указанной камеры.
12. Механический часовой механизм по п. 9, отличающийся тем, что указанная магнитная система соединения предусмотрена между указанной первой частью промежуточного органа и резонатором, и тем, что указанный промежуточный орган расположен за пределами указанной камеры.
13. Механический часовой механизм по п. 12, отличающийся тем, что магнитная система соединения выполнена с возможностью обеспечения колебания арретира (160) синхронно с резонатором между двумя стабильными положения остановки этого арретира, в которых он удерживается поочередно в течение части каждого цикла колебания резонатора.
14. Механический часовой механизм по любому из пп. 8, 9, 11-13, отличающийся тем, что не содержит в указанной камере подвижного элемента, поворачивающегося с механическим трением в подшипниках.
15. Механический часовой механизм по п. 10, отличающийся тем, что не содержит в указанной камере подвижного элемента, поворачивающегося с механическим трением в подшипниках.
16. Механический часовой механизм по п. 14, отличающийся тем, что указанный резонатор содержит маятник (75) с валом (126), по меньшей мере частично выполненным из магнитного материала и поворачивающимся по существу без механического трения между двумя магнитными подшипниками (128, 130).
17. Механический часовой механизм по п. 15, отличающийся тем, что указанный резонатор содержит маятник (75) с валом (126), по меньшей мере частично выполненным из магнитного материала и поворачивающимся по существу без механического трения между двумя магнитными подшипниками (128, 130).
18. Механический часовой механизм по п. 14, отличающийся тем, что указанный резонатор образован маховиком (184) маятника и гибкими пластинками (186, 188), которые соединяют этот маховик с указанной камерой, причем эти гибкие пластинки выполнены с возможностью обеспечения колебания маятника с определенной частотой.
19. Механический часовой механизм по п. 15, отличающийся тем, что указанный резонатор образован маховиком (184) маятника и гибкими пластинками (186, 188), которые соединяют этот маховик с указанной камерой, причем эти гибкие пластинки выполнены с возможностью обеспечения колебания маятника с определенной частотой.
20. Механический часовой механизм по любому из пп. 15, 17, 19, отличающийся тем, что указанный промежуточный орган (78) имеет вал (98), по меньшей мере частично выполненный из магнитного материала и поворачивающийся по существу без механического трения между двумя магнитными подшипниками (110, 111).
21. Механический часовой механизм по любому из пп. 15, 17, 19, отличающийся тем, что указанный промежуточный орган соединен гибкими пластинками с указанной камерой, причем эти гибкие пластинки выполнены с возможностью обеспечения указанного колебания промежуточного органа синхронно с указанным резонатором.
22. Механический часовой механизм по любому из пп. 1, 2, 4, 8, 9, 11, 12, отличающийся тем, что указанный резонатор выполнен в виде пружинного маятника и содержит устройство регулирования частоты колебания пружинного маятника, содержащее регулятор (134) с двумя штифтами и магнитом (138), который находится вблизи стенки указанной камеры так, что может вступать в магнитную связь с намагниченным инструментом (140), находящимся за пределами этой камеры, при этом угловое положение регулятора может быть изменено при помощи этого инструмента снаружи камеры.
23. Механический часовой механизм по п. 3, отличающийся тем, что указанный резонатор выполнен в виде пружинного маятника и содержит устройство регулирования частоты колебания пружинного маятника, содержащее регулятор (134) с двумя штифтами и магнитом (138), который находится вблизи стенки указанной камеры так, что может вступать в магнитную связь с намагниченным инструментом (140), находящимся за пределами этой камеры, при этом угловое положение регулятора может быть изменено при помощи этого инструмента снаружи камеры.
24. Механический часовой механизм по п. 10, отличающийся тем, что указанный резонатор выполнен в виде пружинного маятника и содержит устройство регулирования частоты колебания пружинного маятника, содержащее регулятор (134) с двумя штифтами и магнитом (138), который находится вблизи стенки указанной камеры так, что может вступать в магнитную связь с намагниченным инструментом (140), находящимся за пределами этой камеры, при этом угловое положение регулятора может быть изменено при помощи этого инструмента снаружи камеры.
25. Механический часовой механизм по п. 22, отличающийся тем, что указанный регулятор содержит центральную зону, расположенную между держателем (136) колонки волосковой пружины и мостом (132), причем этот мост находится над держателем и регулятором относительно пружинного маятника и закреплен на дне указанной камеры.
26. Механический часовой механизм по п. 23 или 24, отличающийся тем, что указанный регулятор содержит центральную зону, расположенную между держателем (136) колонки волосковой пружины и мостом (132), причем этот мост находится над держателем и регулятором относительно пружинного маятника и закреплен на дне указанной камеры.
27. Механический часовой механизм по любому из пп. 1, 2, 4-9, 11-13, 15-19, 23-25, отличающийся тем, что в указанной камере выполнена газовая ловушка.
28. Механический часовой механизм по п. 3, отличающийся тем, что в указанной камере выполнена газовая ловушка.
29. Механический часовой механизм по п. 10, отличающийся тем, что в указанной камере выполнена газовая ловушка.
30. Механический часовой механизм по п. 14, отличающийся тем, что в указанной камере выполнена газовая ловушка.
31. Механический часовой механизм по п. 20, отличающийся тем, что в указанной камере выполнена газовая ловушка.
32. Механический часовой механизм по п. 21, отличающийся тем, что в указанной камере выполнена газовая ловушка.
33. Механический часовой механизм по п. 22, отличающийся тем, что в указанной камере выполнена газовая ловушка.
34. Механический часовой механизм по п. 26, отличающийся тем, что в указанной камере выполнена газовая ловушка.
| Гильза цилиндра двигателя внутреннего сгорания | 1981 |
|
SU1038519A1 |
| WO 2013084042 A1, 13.06.2013 | |||
| WO 2013084040 A1, 13.06.2013 | |||
| US 3630014 A1, 28.12.1971 | |||
| DE2002561 A1, 17.09.1970. | |||

