Область техники
Настоящее изобретение относится к конструкции кровати, содержащей участки с независимым автоматическим регулированием жесткости и/или высоты.
Предпосылки изобретения
Конструкция кровати обеспечивает опору для веса или части веса пользователя; при этом кровать обеспечивает распределение веса пользователя по части поверхности устройства. В зависимости от того, как именно распределяется вес пользователя на кровати, кровать воспринимается как мягкая или жесткая. Степень жесткости такой кровати зависит от свойств упругих элементов, например, коэффициента жесткости пружин, и от того, как именно эти упругие элементы установлены в кровати, в частности от степени сжатия или предварительного напряжения. Соответственно, жесткость кровати обычно задается в процессе изготовления устройства.
Однако разные пользователи могут иметь разные пожелания и потребности в том, что касается жесткости. Кроме того, для разных частей тела может требоваться различная жесткость.
Известны конструкции кровати с переменной жесткостью. Жесткость устройства может регулироваться за счет создания деформации упругих элементов различной степени выраженности. Деформирующий элемент обладает способностью вызывать деформацию упругого элемента независимо от деформации этого упругого элемента под весом пользователя. Это означает, что жесткость кровати можно регулировать в процессе ее подготовки к использованию в соответствии с пожеланиями пользователя. Кроме того, можно обеспечить компенсацию изменения жесткости устройства, обусловленного возможными изменениями упругих свойств упругой конструкции устройства с течением времени. Также известно независимое изменение жесткости различных участков (секций) матраса.
Такие известные решения описаны, например, в патентных заявках ЕР 2245967 и WO 2009/120270. В обоих этих документах также описана возможность контроля давления, оказываемого на различные участки, а также автоматического регулирования жесткости различных участков с тем, чтобы уменьшить общее давление.
Однако представление о том, какую жесткость должны иметь различные участки, чтобы обеспечить максимальный комфорт, у разных пользователей может существенно различаться. Соответственно, для многих пользователей общее сведение давления к минимуму не обеспечивает наиболее комфортной конфигурации. Кроме того, распределение давления на матрас в значительной степени зависит от лежачего положения пользователя, и пользователь зачастую требует, как отдельного распределения жесткости между участками кровати, так и различной общей жесткости/мягкости матраса для разных лежачих положений.
Таким образом, по-прежнему существует потребность в конструкции кровати, которая обеспечивала бы автоматическое регулирование жесткости сравнительно рентабельным способом с тем, чтобы сделать кровать более удобной и, соответственно, обеспечить более расслабляющий и полезный отдых и сон.
Краткое описание изобретения
Таким образом, цель настоящего изобретения заключается в том, чтобы, по меньшей мере, частично решить указанные проблемы и предложить усовершенствованную конструкцию кровати.
Эти и другие цели, которые будут ясны из приведенного ниже описания, достигаются благодаря конструкции кровати и способу управления такой конструкцией согласно прилагаемой формуле изобретения.
Согласно первому аспекту изобретения предложена конструкция кровати, обладающая адаптивными свойствами, содержащая:
матрас, содержащий по меньшей мере один участок с возможностью независимого регулирования жесткости и/или высоты;
приводной блок, обеспечивающий регулирование жесткости и/или высоты указанного по меньшей мере одного участка;
по меньшей мере один датчик, при этом указанный датчик(датчики) предназначен для измерения физического параметра, связанного с лежачим положением, которое принимает пользователь; и
блок управления, предназначенный для идентификации на основе входных сигналов от указанного датчика(датчиков) текущего лежачего положения пользователя при этом указанное лежачее положение может быть идентифицировано как одно из набора из по меньшей мере двух заранее определенных лежачих положений, и для управления приводным блоком с целью регулирования жесткости и/или высоты указанного участка(участков) в соответствии с заранее заданными значениями жесткости/высоты, соответствующими идентифицированному лежачему положению.
Манера сна и представления об удобстве у разных людей могут существенно различаться. Кроме того, пользователь зачастую может считать мягкий матрас более удобным при использовании одного лежачего положения, например, на животе, т.е. в положении лежа на животе, или на боку, по сравнению с отдыхом в другом положений для сна, например, на спине, т.е. в положении лежа на спине. Согласно настоящему изобретению предложен эффективный и в то же время относительно простой и экономичный способ изменения свойств матраса в зависимости от выбранного пользователем лежачего положения, что позволяет постоянно обеспечивать оптимальную степень комфорта. Установлено, что это существенно улучшает впечатления от отдыха и сна, и, соответственно, качество отдыха и сна. Улучшение качества отдыха и сна также способствует улучшению состояния здоровья пользователя и в целом улучшению качества жизни.
В контексте настоящего изобретения «конструкция кровати» может трактоваться в широком смысле. Конструкция кровати может представлять собой единый блок, но также может представлять собой более или менее распределенную систему. Например, блок управления (целиком или частично), датчик, дополнительный пульт(пульты) дистанционного управления и т.д. могут представлять собой отдельные блоки, соединенные с другими частями предложенной конструкции кровати с помощью проводных или беспроводных соединений.
Датчик(датчики) может крепиться к матрасу или быть встроен в матрас. Однако датчик(датчики) может также быть соединен с рамой кровати или т.п. Кроме того датчик(датчики) может представлять собой отдельный блок, например, носимый пользователем конструкции кровати.
Предпочтительно в каждом из участков размещается по меньшей мере один датчик. Однако в зависимости, например, от типа используемого датчика лежачее положение также можно идентифицировать при помощи датчиков, расположенных исключительно на одном или нескольких из участков, или датчиков, расположенных вне участков, например, в концевой секции конструкции кровати.
Матрас предпочтительно содержит по меньшей мере два участка с независимо регулируемой жесткостью и/или высотой. Тем по меньшей мере еще более предпочтительно, чтобы матрас содержал по меньшей мере три таких участка, предпочтительно по меньшей мере пяти участков. Участки переменной жесткости могут быть, например, предусмотрены, по меньшей мере, для бедер и плеч пользователя. Такие участки могут быть также предусмотрены для ступней и головы пользователя. Между такими участками могут быть расположены участки постоянной жесткости/высоты. Тем не менее, альтернативно эти промежуточные участки также могут иметь переменную жесткость и/или высоту. Таким образом, некоторые варианты изобретения могут предусматривать наличие 7, 10 и даже более участков переменной жесткости и/или высоты.
Предпочтительно участки с независимо регулируемой жесткостью и/или высотой простираются практически на всю ширину матраса, и в продольном направлении матраса участки разделены. Поскольку обычно требуется одна и та же степень жесткости, не зависимо от того, лежит ли пользователь по центру или ближе к одному из краев, как правило, нет необходимости в разделении участков в поперечном направлении. Однако если данной конструкцией кровати одновременно должны пользоваться несколько человек или, если по иным причинам существует необходимость в разграничении между различными положениями в поперечном направлении, то также могут использоваться участки с переменной жесткостью/высотой, разделенные в поперечном направлении.
Набор заранее определенных лежачих положений предпочтительно содержит по меньшей мере два, и предпочтительно трех лежачих положений, соответствующих положению пользователя лежа на спине (положение лежа на спине), на животе (положение лежа на животе) и на боку. Однако также может быть определено более трех лежачих положений. В частности, могут быть определены различные лежачие положения на боку, например, положения, в которых тело лежит прямо или согнуто/свернуто вперед или назад.
Датчик(датчики) для идентификации лежачего положения могут быть различных типов, и предназначены для определения различных физических параметров, связанных с лежачим положением. Например, датчик(датчики) может быть предназначен для определения веса пользователя, действующего на матрас в различных областях измерения, путем измерения вызванной пользователем деформации матраса, измерения относительной влажности воздуха при различных положениях, измерения локальной температуры при различных положениях и т.п. Идентификация лежачего положения может также производиться путем автоматизированного визуального контроля с помощью камеры, инфракрасного датчика и т.п.
Датчик(датчики) может быть также размещен на теле пользователя, например, крепиться непосредственно к телу пользователя с помощью пластыря, клея, клейкой ленты и т.п. или же крепиться к ночному белью, пижаме и т.п., надеваемым пользователем. В таких случаях датчик(датчики) может использоваться для обнаружения абсолютного положения, отслеживания движений и т.п. Например, датчик(датчики) может представлять собой акселерометр, например, аналогичный используемым в смартфонах и т.п., предпочтительно измеряющий ускорения в нескольких направлениях, например, вдоль трех разных осей. Альтернативно или дополнительно датчик(датчики) может содержать гиродатчик, например, МЭМС-гироскоп (гироскоп на основе микроэлектромеханических систем) или оптический гироскоп, например, аналогичный используемому в современных беспроводных манипуляторах типа «мышь» и т.п. Благодаря сочетанию гироскопа и акселерометра датчики способны отслеживать движение вдоль еще большего числа осей, например влево, вправо, вверх, вниз, вперед и назад, а также вращение вокруг продольной, поперечной и вертикальной осей, обеспечивая тем самым возможность более точного отслеживания движения. Также могут использоваться носимые датчики других типов, например, магнитометрические компасы и т.п.
Такой носимый датчик(датчики) могут размещаться на различных участках тела. Предпочтительным местом размещения датчика является верхняя часть плеча, т.е. датчик носится, как погон. Такое расположение датчика очень удобно для определения лежачего положения и, как правило, позволяет избежать его контакта с кроватью или постельным бельем во время отдыха. Датчик(датчики) предпочтительно взаимодействует с блоком управления посредством беспроводного соединения, RFID-интерфейса, технологии Bluetooth и т.п.
Альтернативно датчики могут представлять собой набор датчиков, распределенных по поверхности матраса. Например, эти датчики могут образовывать предпочтительно гибкую и плоскую чувствительную оболочку, которая располагается поверх матраса. Чувствительная оболочка может обладать полным электрическим сопротивлением, в частности активным сопротивлением, которое изменяется под воздействием вертикально направленной силы, приложенной к ней. В частности, эта чувствительная оболочка может содержать верхний гибкий электропроводящий лист, содержащий верхний проводящий элемент датчика, нижний гибкий электропроводящий лист, содержащий нижний проводящий элемент датчика, а также гибкий промежуточный слой, например пьезорезистивный слой, с активной чувствительной областью, полное электрическое сопротивление которой изменяется под воздействием вертикально направленной силы, приложенной к ней, при этом указанный промежуточный слой расположен между указанными верхним и нижним электропроводящими листами. В этом варианте верхний и нижний листы электрически связаны с промежуточным слоем. Предпочтительно датчики могут иметь несимметричную вольтамперную характеристику. Пьезорезистивный слой может быть, например, выполнен в виде взвеси электропроводящих частиц в полимерной матрице. Электропроводящие частицы могут, в частности, иметь покрытие, содержащее по меньшей мере один оксид металла, например, оксид меди, за счет чего в указанном слое создается полупроводящий p-n-переход. Оболочка предпочтительно изготовлена, по меньшей мере, частично, из эластичного материала, и предпочтительно из эластичной ткани. Примеры таких чувствительных оболочек, которые могут быть использованы в описанной выше конструкции, приведены в заявках US 8161826 и WO 2009/120270, которые включены в настоящую заявку посредством ссылки.
Различные лежачие положения и/или различные значения жесткости/высоты регулируемых участков могут быть определены заранее, или определены и заданы окончательно в процессе изготовления или же в процессе установки, выполняемой, например, продавцом. Однако предпочтительно по меньшей мере один набор лежачих положений и значений параметров жесткости/высоты может определяться пользователем и со временем также может повторно определяться и сбрасываться.
Для этого предпочтительно блок управления может работать в режиме настройки параметров, в котором можно определять и/или регулировать заранее заданные значения жесткости/высоты различных участков кровати для различных лежачих положений. Кроме того, предпочтительно, чтобы в режиме настройки параметров можно было определять и/или повторно определять набор заранее определенных лежачих положений.
Таким образом, пользователь может входить в режим настройки параметров, когда пожелает, и в режиме настройки параметров регулировать значения жесткости/высоты различных участков кровати для различных лежачих положений, определять новые лежачие положения или исключать ранее определенные лежачие положения. Для этого пользователь может, например, ложиться на кровать, принимая определенные лежачие положения. После этого пользователь может вручную регулировать жесткость/высоту различных участков пока не будет получена комфортная конфигурация. После этого лежачее положение и значения жесткости/высоты различных участков могут быть сохранены. Эта процедура может быть повторена для других лежачих положений. Альтернативно или дополнительно из памяти может быть загружено ранее сохраненное лежачее положение, и затем значения жесткости/высоты различных участков регулируется и сохраняется.
Для связи с блоком управления может использоваться пульт дистанционного управления, который предназначен для связи с блоком управления, например, посредством интерфейса беспроводной связи.
При определении или повторном определении набора лежачих положений блок управления также может использоваться для сохранения сенсорных данных датчиков, соответствующих заранее определенным лежачим положениям, и для использования сохраненных данных для различения заранее определенных лежачих положений в рабочем режиме. Авторами настоящего изобретения было установлено, что данные измерений, полученные от набора разных датчиков, могут быть использованы для однозначной идентификации большого числа различных лежачих положений посредством использования величин отдельных измеренных значений и/или с учетом соотношения(соотношений) одновременно измеренных значений. Это можно использовать для того, чтобы заранее определить то, как нужно идентифицировать разные лежачие положения в целом, не зависимо от индивидуальных особенностей пользователя. Однако, поскольку конструкцию кровати может использовать пользователь с существенно отличными весом, ростом и формой тела, предпочтительным является определение этих параметров и/или соотношения(соотношений) отдельно для каждого пользователя.
Блок управления может использоваться для непрерывного или периодического определения, на основе входных сигналов от указанных датчиков, текущего лежачего положения пользователя. Например, блок управления может непрерывно контролировать данные датчиков и оценивать, произошла ли смена лежачего положения, или проводить такую оценку периодически, например, каждые 15 или 30 секунд, каждую минуту и т.п. Тем не менее альтернативно или дополнительно блок управления может быть предназначен для определения на основе входных сигналов от указанных датчиков текущего лежачего положения пользователя, если было идентифицировано, что входной сигнал от любого из датчиков изменен по сравнению с последним сохраненным значением датчика от указанного датчика на величину, превышающую заранее определенное пороговое значение.
Матрасы могут быть различных типов, например, могут содержать надувные элементы, упругие элементы из вспененного материала или каучука, заполняемые водой элементы и т.п. Однако предпочтительно матрас содержит несколько витых пружин, и при этом предпочтительно витые пружины расположены в отдельных чехлах из покрывающего материала для образования матраса с пружинными блоками.
Согласно другому аспекту настоящего изобретения предложен способ автоматического изменения свойств конструкции кровати, включающий этапы:
предоставления матраса, содержащего по меньшей мере один участок с независимо регулируемой жесткостью и/или высотой;
предоставления по меньшей мере одного датчика, при этом указанный датчик(датчики) предназначен для измерения физического параметра, связанного с лежачим положением, которое принимает пользователь;
идентификации на основе входных сигналов от указанного датчика(датчиков) текущего лежачего положения пользователя, при этом указанное лежачее положение может быть идентифицировано как одно из набора из по меньшей мере двух заранее определенных лежачих положений; и
регулирования жесткости и/или высоты указанного по меньшей мере одного участка в соответствии с заранее заданными значениями жесткости/высоты, соответствующими идентифицированному лежачему положению.
Посредством этих дополнительных аспектов изобретения могут быть достигнуты подобные цели и преимущества, описанные выше в связи с первым аспектом изобретения.
Краткое описание графических материалов
Эти и другие аспекты настоящего изобретения далее будут описаны более подробно со ссылкой на прилагаемые графические материалы, на которых показаны предпочтительные на данный момент варианты осуществления изобретения.
На фиг. 1 показан схематический вид сбоку в перспективе конструкции кровати согласно настоящему изобретению;
на фиг. 2a-2d показаны схематические виды сверху матрасов, используемых в конструкции кровати по фиг. 1 и имеющих различные конфигурации участков;
на фиг. 3а-3с показаны схематические виды сверху различных вариантов осуществления конфигураций датчиков на матрасе в конструкции кровати по фиг. 1;
на фиг. 4 показано более детальный схематический вид одного варианта осуществления конфигурации датчиков;
на фиг. 5а-с показаны матрас с семью участками, при использовании в положении лежа на боку, положении лежа на животе и положении лежа на спине, соответственно;
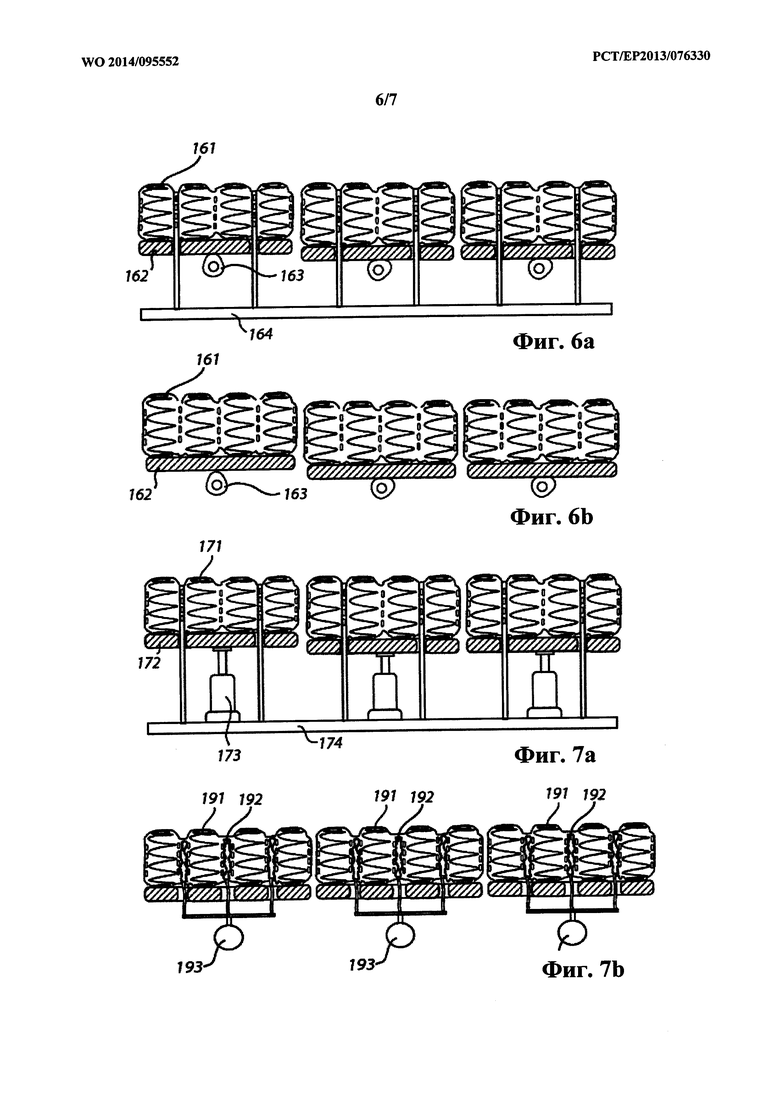
на фиг. 6а показано устройство регулирования жесткости согласно первому варианту осуществления;
на фиг. 6b показано устройство регулирования высоты согласно первому варианту осуществления;
на фиг. 7а и 7b показано устройство регулирования жесткости согласно второму и четвертому вариантам осуществления, соответственно; и
на фиг. 8 показано устройство регулирования жесткости согласно третьему варианту осуществления.
Подробное описание
На фиг. 1 схематически показана конструкция кровати согласно первому варианту осуществления изобретения. Конструкция кровати обладает адаптивными свойствами и, в частности, содержит по меньшей мере один, и предпочтительно по меньшей мере два участка, имеющих независимо регулируемую жесткость и/или высоту.
Конструкция 1 кровати содержит матрас 2, содержащий некоторое количество участков 21. Кроме того, предусмотрена конфигурация 3 датчиков, где на каждом из участков расположен по меньшей мере один датчик 31. Датчики предназначены для измерения физического параметра, который пропорционален весу пользователя, воздействующему на матрас в областях измерения датчиков. Кроме того, в конструкции кровати предусмотрен по меньше мере один приводной блок 4, предназначенный для регулирования жесткости и/или высоты участков. Блок управления 5 предназначен для приема входных сигналов от датчиков, и идентификации текущего лежачего положения пользователя на основе входных сигналов. Лежачее положение идентифицируется как одно из набора из по меньшей мере двух заранее определенных лежачих положений. Блок управления 5 предназначен для управления приводным блоком(блоками) для регулирования жесткости и/или высоты соответствующих участков для приведения этих параметров к заранее заданным значениям жесткости/высоты, которые соответствуют идентифицированному лежачему положению.
Матрас содержит по меньшей мере два участка с независимым регулированием жесткости и/или высоты. Тем не менее, предпочтительно матрас содержит по меньшей мере три таких участка, и предпочтительно по меньшей мере пять участков. Например, различные участки переменной жесткости/высоты могут быть предусмотрены, по меньшей мере, для ягодиц и плеч пользователя. Такие участки также могут быть предусмотрены для ступней и головы пользователя. Между такими участками могут быть расположены участки постоянной жесткости/высоты. Тем не менее, альтернативно эти промежуточные участки также могут иметь переменную жесткость и/или высоту. Таким образом, в более предпочтительных вариантах осуществления могут быть предусмотрены 7, 10 и даже больше участков переменной жесткости/высоты.
На фиг. 2а показан примерный вариант осуществления с пятью участками переменной жесткости и/или высоты. В данном случае участки могут соответствовать (от одной стороны до другой) голове/шее, плечам, тазу, ногам и ступням.
На фиг. 2b показан примерный вариант осуществления с семью участками переменной жесткости и/или высоты. В данном случае эти участки могут соответствовать (от одной стороны до другой) голове/шее, плечам/верхней части спины, пояснице, тазу/ягодицам, бедрам/коленям, икрам/голеням и лодыжкам/ступням.
На фиг. 2с предусмотрены те же участки, что и на фиг. 2b, но здесь регулируемые жесткость и/или высоту имеют только участок для плеч/верхней части спины и участок для таза/ягодиц, при этом остальные участки имеют фиксированную жесткость/высоту. В данном случае участки для бедер/коленей, икр/голеней и лодыжек/ступней могут быть представлены как три отдельных участка, как два участка или как один единственный участок.
Однако описанные выше конфигурации участков приведены лишь в качестве примеров, кроме того, возможны и другие конфигурации участков с большим или меньшим количеством участков.
Предпочтительно участки с независимо регулируемыми жесткостью и/или высотой простираются практически на всю ширину матраса и в продольном направлении матраса участки разделены. Такие варианты осуществления показаны на фиг. 2а, 2b и 2с. Однако если конструкцией кровати одновременно должны пользоваться более чем один человек, или если необходимо различать между различными положениями в поперечном направлении по иным причинам, возможно использование участков переменной жесткости/высоты, разделенных и в поперечном направлении. Пример такой конфигурации участков приведен на фиг. 2d. Здесь приведено семь расположенных в продольном направлении участков, как на фиг. 2b, но, кроме того, каждый продольный участок также разделен на три участка по ширине. Таким образом, данный вариант осуществления в совокупности содержит 21 участок с независимо регулируемыми жесткостью и/или высотой. Кроме того, описанная выше конфигурация участков также приведена лишь в качестве примера, и возможно разделение по ширине поровну на два участка, а также более чем на три, например, на четыре, пять или еще большее количество.
Предпочтительно датчики расположены сверху матраса. В зависимости от типа используемых датчиков и необходимой разрешающей способности возможны различные конфигурации расположения. На фиг. 3а-3с схематически изображены некоторые альтернативные конфигурации.
На фиг. 3а изображена конфигурация датчиков, где на каждом участке предусмотрено по одной чувствительной области 31. Это позволяет определять давление, воздействующее на каждый из участков. На фиг. 3b представлена конфигурация датчиков, где на каждом участке предусмотрено по три чувствительные области 31', при этом чувствительные области разделены по ширине матраса. Это позволяет определять давление, воздействующее на каждый из участков, но кроме того, можно определить, как именно распределяется между сторонами и серединой давление на каждом участке. Конфигурация датчиков на фиг. 3с содержит группу чувствительных областей 31'' на каждом участке, при этом датчики на каждом участке разделены как по длине, так и по ширине матраса. В примере варианта осуществления по фиг. 3с по длине выполнено 5 чувствительных областей, и три чувствительные области по ширине на каждом участке, предоставляя в совокупности 15 чувствительных областей на каждом участке. Однако возможно использование большего или меньшего числа чувствительных областей и чувствительные области также могут располагаться по другой схеме. Число чувствительных областей также не должно быть одинаковым на различных участках.
Датчики предназначены для измерения физического параметра, связанного с лежачим положением, которое принимает пользователь, например, физического параметра, величина которого пропорциональна весу пользователя, воздействующему на матрас, или связанного с относительной влажностью воздуха, температурой или т.п. Измеренная информация, относящаяся к физическому параметру передается в блок управления. Физический параметр может быть, например, давлением, весом, деформацией, температурой, влажностью воздуха и т.п. Таким образом, посредством датчика можно измерять вес, воздействующий на конструкцию кровати, или другие изменения, происходящие в связи со сменой лежачего положения. Измеренная информация используется в качестве основы для регулирования жесткости и/или высоты участков, как будет более подробно описано ниже.
В качестве датчиков могут использоваться различные измерительные приборы. Например, может использоваться одно или несколько из следующего: манометры, пьезоэлектрические тензометрические датчики, емкостные, магнитные датчики, пьезоэлектрические датчики, оптические датчики, потенциометрические датчики и резонансные датчики, термопарные датчики или термисторные датчики. Датчики могут быть расположены внутри матраса, под матрасом или сверху матраса.
В одном примере варианта осуществления датчики выполнены как группа датчиков, расположенная на поверхности матраса. Например, датчики могут образовывать предпочтительно гибкую и плоскую чувствительную оболочку, расположенную поверх матраса. При этом чувствительная оболочка может обладать полным электрическим сопротивлением, которое изменяется под воздействием вертикально направленной силы, приложенной к ней. Такая конфигурация датчиков схематически показана на фиг. 4. Здесь чувствительная оболочка содержит верхний гибкий электропроводящий лист 61, содержащий верхний проводящий элемент(элементы) 62 датчика, нижний гибкий электропроводящий лист 63, содержащий нижний проводящий элемент(элементы) 64 датчика, а также гибкий промежуточный слой 65 с активной чувствительной областью, полное электрическое сопротивление которой изменяется под воздействием вертикально направленной силы, приложенной к ней. Промежуточный слой 65 расположен между верхним электропроводящим листом 61 и нижним электропроводящим листом 63. Здесь верхний и нижний электропроводящие листы 61, 63 электрически связаны с промежуточным слоем. Предпочтительно датчики могут иметь несимметричную вольтамперную характеристику. Пьезорезистивный слой может быть, например, выполнен в виде взвеси электропроводящих частиц в полимерной матрице. При этом электропроводящие частицы могут, в частности, иметь покрытие, содержащее по меньшей мере один оксид металла, например, оксид меди, чтобы таким образом создать при помощи указанного слоя полупроводящий p-n-переход. Предпочтительно оболочка изготавливается, по меньшей мере частично, из эластично растяжимого материала, предпочтительно из растяжимой ткани. Примеры таких чувствительных оболочек, которые могут быть использованы в описанной выше конструкции, приведены в заявках US 8161826 и WO 2009/120270, которые включены в настоящую заявку посредством ссылки.
На основе информации, полученной от датчиков, блок управления 5 предназначен для идентификации того, в каком из набора заранее определенных лежачих положений находится в данный момент пользователь. Предпочтительно набор заранее определенных лежачих положений содержит по меньшей мере два, и предпочтительно три лежачих положения, соответствующих положению пользователя лежа на спине (положение лежа на спине), на животе (положение лежа на животе) и на боку. Тем не менее, также может быть определено более чем три лежачих положения. Например, могут быть определены различные лежачие положения на боку (например, положение, промежуточное между положением на животе и на боку), в том числе, когда тело лежит ровно или согнуто/свернуто вперед или назад. Также может быть возможным и необходимым проводить различие между положением на левом боку (например, положение, промежуточное между положением на животе и на левом боку) и положением на правом боку (например, положение, промежуточное между положением на животе и на правом боку). Кроме того, можно различать различные положения рук в положении лежа на животе, на спине и на боку. Например, можно различать расположены ли руки вдоль тела, раскинуты в стороны, направлены вверх или заложены за голову.
Некоторые исследования указывают, что наиболее распространенными лежачими положениями во время сна являются:
- положение зародыша, т.е. выражено изогнутое/скрученное положение лежа на боку (41%);
- положение «бревно», т.е. положение лежа ровно на боку с руками, расположенными вдоль тела (15%);
- положение «ностальгии» или «жаждущего», т.е. положение на боку с незначительным изгибом/скручиванием тела, при котором руки в одном и том же направлении направлены вбок от тела (13%);
- положение «солдат», т.е. положение лежа на спине с руками вдоль тела (8%);
- положение «свободного падения», т.е. положение лежа на животе с руками, вытянутыми вверх по сторонам от головы (7%); и
- положение «морская звезда», т.е. положение лежа на спине с руками, вытянутыми вверх по сторонам от головы (5%).
Эти и возможно дополнительные лежачие положения предпочтительно могут идентифицироваться посредством блока управления.
Различные лежачие положения и/или различные жесткость/высота регулируемых участков могут быть заранее определены, или определены и заданы окончательно в процессе изготовления, или в процессе установки, выполняемой, например, продавцом. Однако предпочтительно по меньшей мере одно из набора лежачих положений и параметров жесткости/высоты может определяться пользователем и со временем также может повторно определяться и сбрасываться.
Для этого блок управления предпочтительно работает в режиме настройки параметров, в котором можно определять и/или регулировать заранее заданные значения жесткости/высоты различных участков кровати для различных лежачих положений. Также предпочтительно, чтобы в режиме настройки параметров можно было определять и/или повторно определять набор заранее определенных лежачих положений.
Таким образом, пользователь может переходить в режим настройки параметров, когда пожелает, и в этом режиме настройки параметров изменять значения жесткости/высоты различных участков для различных лежачих положений, определять новые лежачие положения и/или исключать ранее определенные лежачие положения. Для этого пользователь может, например, ложиться на кровать, принимая определенные лежачие положения. Затем пользователь может вручную регулировать жесткость и/или высоту различных участков пока не будет получена комфортная конфигурация. Затем лежачее положение и значения жесткости/высоты различных участков могут быть сохранены. Эта процедура может быть повторена для других лежачих положений. Альтернативно или дополнительно из памяти может быть загружено ранее сохраненное лежачее положение, и затем значения жесткости/высоты различных участков регулируется и сохраняется.
Для связи с блоком управления может использоваться пульт 7 дистанционного управления, который предназначен для связи с блоком управления, например, посредством интерфейса беспроводной связи.
При определении или повторном определении набора лежачих положений блок управления также может использоваться для сохранения сенсорных данных датчиков, соответствующих заранее определенным лежачим положениям, и для использования сохраненных данных для различения заранее определенных лежачих положений в рабочем режиме. Этого можно добиться посредством заранее определенных данных о том, как нужно идентифицировать разные лежачие положения в целом, не зависимо от конкретного пользователя. Однако, поскольку конструкцию кровати может использовать пользователь с существенно отличными весом, ростом и формой тела, предпочтительным является определение этих параметров и/или соотношения(соотношений) отдельно для каждого пользователя.
Сравнительно простой способ настройки работы блока управления заключается в том, чтобы позволить пользователю самостоятельно определять различные лежачие положения, которые должен идентифицировать блок управления, и задавать желаемые значения жесткости/высоты участков для каждого из указанных положений. Как правило, пользователь прекрасно знает, какие лежачие положения он принимает чаще всего. Затем пользователь, к примеру, сначала принимает первое из этих лежачих положений и задает желаемые значения жесткости/высоты каждого участка, например, посредством пульта дистанционного управления. Если пользователь доволен результатом, он сохраняет полученные настройки посредством активирования подходящего элемента управления на пульте. Таким образом, блок управления сохранит это положение в качестве первого лежачего положения вместе со значениями жесткости/высоты каждого участка для указанного лежачего положения и с данными датчиков, полученными, когда пользователь принимал это лежачее положение. Затем эта процедура повторяется еще для одного или нескольких лежачих положений. Когда необходимое количество лежачих положений будет сохранено, пользователь выходит из режима настройки параметров и переходит в рабочий режим. При этом блок управления отслеживает входные сигналы от датчиков и на основе сохраненных данных, связанных с сохраненными лежачими положениями, определяет, какое лежачее положение наиболее близко к тому положению, которое в данный момент принял пользователь, и контролирует жесткость и/или высоту участков в соответствии со значениями жесткости/высоты, сохраненными для указанного лежачего положения.
При получении данные датчиков для лежачего положения могут незначительно различаться, если значения жесткости/высоты матраса регулировались в соответствии с этим лежачим положением и если значения жесткости/высоты все еще регулируются в соответствии с другим, ранее принятым лежачим положением. Однако, как правило, блок управления в любом случае способен различать такие лежачие положения. Тем не менее, если было сохранено большое количество лежачих положений и/или если было сохранено несколько схожих лежачих положений, блок управления может дополнительно сохранять данные датчиков для лежачего положения как при настройке матраса на это лежачее положение, так и при настройке на другие лежачие положения. Например, можно сохранять данные датчиков для каждого заранее определенного лежачего положения и для каждой настройки значения жесткости/высоты, соответствующей этим заранее определенным лежачим положениям. Таким образом, если были определены три лежачих положения a, b и с, соответствующие им настройки жесткости/высоты А, В и С, соответственно, данные датчиков, предназначенные для различения разных лежачих положений, могут сохраняться для лежачих положений a, b и с с настройкой жесткости/высоты А; для a, b и с с настройкой жесткости/высоты В; для a, b и с с настройкой жесткости/высоты С. Таким образом различение между разными лежачими положениями становится более точным. Альтернативно или дополнительно может использоваться меньшее число датчиков или менее чувствительные датчики.
Блок управления может быть предназначен для постоянной или периодической идентификации текущего лежачего положения пользователя на основе входных сигналов от указанных датчиков. В частности, блок управления может постоянно контролировать данные датчиков и оценивать, произошла ли смена лежачего положения, или проводить такую оценку периодически, например, каждые 15 или 30 секунд, каждую минуту и т.п. Тем не менее альтернативно или дополнительно блок управления может быть предназначен для определения на основе входных сигналов от указанных датчиков текущего лежачего положения пользователя, если было идентифицировано, что входной сигнал от любого из датчиков изменен по сравнению с последним сохраненным значением датчика от указанного датчика на величину, превышающую заранее определенное пороговое значение.
Блок управления может быть дополнительно предназначен для регистрации и сохранения данных от датчиков. Таким образом, можно сохранить необработанные данные от датчиков и/или можно регистрировать накопленные данные, полученные контроллером на основе таких данных от датчиков. Например, можно регистрировать любое идентифицированное изменение лежачего положения. Сохраненные данные могут быть затем использованы для анализа сна пользователя, например, врачом, специалистом по сну и т.п. Анализ таких данных сна позволяет выявлять различные проблемы, связанные со сном, и находить решения, которые могут улучшить как продолжительность, так и качество сна.
Когда блок управления зарегистрирует смену положения пользователем, предпочтительно он настроен на ожидание в течение некоторого времени, например, несколько секунд, прежде чем адаптировать жесткость/высоту в соответствии с новым лежачим положением. Например, блок управления может использовать время задержки в диапазоне 1-60 с, предпочтительно 5-30 с, и в наиболее предпочтительном варианте 10-20 с. Это позволяет избежать ненужных изменений жесткости/высоты, например, когда пользователь ненадолго принимает новое лежачее положение, а затем снова возвращается в предыдущее лежачее положение, когда пользователь принимает промежуточное лежачее положение прежде чем принять нужное новое положений и в других подобных случаях. Таким образом, исключается слишком частое изменения жесткости/высоты и тем самым переходы становятся более плавными и менее заметными.
На фиг. 5а-с изображен матрас с семью участками, когда пользователь находится в положении лежа на боку, на животе и, соответственно, на спине. Далее упоминается только жесткость. Однако специалисту в данной области станет понятно, что соответствующего эффекта можно достигнуть и путем изменения высоты, как подробнее будет описано дальше. Таким образом, повышению жесткости соответствует увеличение высоты и наоборот. В положении лежа на боку, как показано на фиг. 5а, плечи оказывают наибольшее давление на матрас, и кроме того, относительно большое давление создается тазом. Часто предпочтительные настройки жесткости участков должны иметь относительно жесткий участок головы/шеи, относительно мягкий участок плеч/верхней части спины, относительно мягкий участок поясницы, относительно мягкий участок таза/ягодиц, относительно жесткий участок бедер/колен, относительно жесткий участок икр/голеней и относительно мягкий участок ступней/лодыжек. В положении лежа на животе, как показано на фиг. 5b, голова оказывает наибольшее давление на матрас, но в целом давление распределяется достаточно равномерно. Часто предпочтительные настройки жесткости участков должны иметь относительно мягкий участок головы/шеи, относительно жесткий участок плеч/верхней части спины, относительно жесткий участок поясницы, относительно жесткий участок таза/ягодиц, относительно жесткий участок бедер/колен, относительно мягкий участок икр/голеней и относительно мягкий участок ступней/лодыжек. В положении лежа на спине, как показано на фиг. 5с, голова и плечи оказывают наибольшее давление на матрас, кроме того, относительно большое давление создается плечами. Часто предпочтительные настройки жесткости участков должны иметь относительно мягкий участок головы/шеи, относительно мягкий участок плеч/верхней части спины, относительно жесткий участок поясницы, относительно мягкий участок таза/ягодиц, относительно жесткий участок бедер/колен, относительно мягкий участок икр/голеней и относительно мягкий участок ступней/лодыжек.
На фиг. 5а-с эти семь участков обозначены буквами A-G, начиная с участка А головы/шеи. У матраса, имеющего 10 различных уровней жесткости, для каждого участка 1 является самым мягким, а 10 - самым жестким, при этом следующие значения жесткости в качестве примера используются для положения лежа на боку (фиг. 5а), положения лежа на животе (фиг. 5b) и положения лежа на спине (фиг. 5с), соответственно.

Однако, как было описано выше, предпочтительные настройки различаются для разных людей, и описанные выше настройки жесткости приведены исключительно в качестве примера.
Используемый матрас может быть различных типов, например, может содержать надувные элементы, элементы на основе упругого пенопласта, упругого каучука и т.п. Однако предпочтительно матрас содержит множество витых пружин, и предпочтительно витые пружины расположены в отдельных чехлах из покрывающего материала для образования матраса с пружинными блоками.
В конфигурации матраса с пружинными блоками данного матраса каждый участок предпочтительно выполнен в виде отдельного пружинного блока, соединенный с другими пружинными блоками. Однако также возможен сплошной матрас с пружинными блоками, простирающийся над несколькими или всеми участками. Каждый матрас с пружинными блоками предпочтительно содержит несколько полос, расположенных рядом и соединенных между собой посредством поверхностного прикрепления, например, клея, сварки, застежки «велкро» и т.п. Каждая полоса содержит несколько сплошных чехлов/кожухов, выполненных из одного сплошного куска материала и отделенных друг от друга поперечными швами, например, сварными швами. Каждый чехол/кожух содержит по меньшей мере одну, и предпочтительно только одну, витую спиральную пружину. Пружины могут иметь виток спирали пружины с диаметром приблизительно 2-10 см, и предпочтительно 6 см.
Однако, как было описано выше, в вышеописанной конструкции кровати также могут использоваться и другие типы матрасов.
Изменение жесткости и/или высоты таких матрасов может достигаться различными способами, которые по существу уже известными из уровня техники. Некоторые примеры таких конструкций будут кратко описаны ниже.
Ссылаясь на фиг. 6а, участки регулируемой жесткости могут быть созданы за счет установки витых пружин 161, помещенных, например, в чехлы, на опорные пластины 162 переменной высоты. Высота опорных пластин может регулироваться с помощью вращающихся элементов 163, расположенных под опорными пластинами, со смещенной осью вращения. В результате этого за счет вращения вращающихся элементов пластины принимают различную высоту. Верхняя поверхность матраса может крепиться к основанию 164 конструкции кровати, при этом за счет различной высоты опорных пластин создается различное предварительное напряжение элементов матраса. Такие средства регулирования жесткости описаны, например, в заявках US 3340548 и US 2011/0258772, которые включены в настоящую заявку посредством ссылки.
Как показано на фиг. 6b, аналогичная система может использоваться для изменения высоты участков. В этом варианте осуществления между основанием 164 и верхней поверхностью матраса нет никакого крепления. Таким образом, разница в высоте опорных пластин создает соответствующую разницу в высоте на поверхности матраса. Предпочтительным зачастую является изменение жесткости, поскольку при этом поверхность матраса будет поддерживать ровную и плоскую верхнюю поверхность, что в большинстве случаев можно считать привлекательным. Однако поддерживающий эффект для пользователя является более или менее таким же не зависимо от того, изменяется ли жесткость или высота участка(участков). Кроме того, изменение высоты зачастую является более простым и дешевым решением.
Кроме того, возможно изменять одновременно жесткость и высоту, например, за счет частичного ограничения смещения верхней поверхности матраса.
Ссылаясь на фиг. 7а, участки с изменяемой жесткостью также могут быть созданы за счет установки витых пружин 171, помещенных, например, в чехлы, на опорные пластины 172 переменной высоты. Высота опорных пластин может регулироваться с помощью смещающих элементов, например, линейных двигателей, домкратов или других подъемных механизмов. Верхняя поверхность матраса также может крепиться к основанию 174 конструкции кровати, при этом за счет различной высоты опорных пластин создается различное предварительное напряжение элементов матраса. Такие средства регулирования жесткости описаны, в частности, в документах AU 551300, US 4222137, US 2006/0253994, WO 99/65366 и ЕР 2245967, которые включены в настоящую заявку посредством ссылки. Подобным образом, как было описано выше со ссылкой на фиг. 6а и 6b, конструкция на фиг. 7а также может использоваться без крепления к основанию, чтобы обеспечить изменение высоты вместо изменения жесткости.
Ссылаясь на фиг. 8, участки переменной жесткости/высоты могут быть выполнены в виде надувных элементов 181, давление в которых может независимо регулироваться с помощью средств 182 нагнетания. Такие средства регулирования жесткости описаны, в частности, в документе WO 2009/120270, при этом указанный документ включен в настоящую заявку посредством ссылки.
Ссылаясь на фиг. 7b, участки с переменной жесткостью могут быть выполнены посредством сочетания надувных элементов 192 и других упругих элементов, в частности витых пружин, например, расположенных в чехлах. Давление в этих надувных элементах может независимо регулироваться с помощью средств 193 нагнетания. Такие средства регулирования жесткости описаны, например, в документе US 5113539, при этом указанный документ включен в настоящую заявку посредством ссылки.
Также могут использоваться другие средства регулирования жесткости и/или высоты, например, посредством размещения проходящих через матрас полос или нитей, при этом изменяются высота и/или натяжение, как например, описано в документе US 4667357, и этом указанный документ включен в настоящую заявку посредством ссылки.
Предпочтительно средства регулирования жесткости/высоты приводятся в действие приводным блоком, например, приводным двигателем, регулирующим жесткость/высоту различных участков матраса с помощью электрического и/или пневматического привода.
Для автоматического изменения жесткости/высоты одного или нескольких участков блок управления может изменять жесткость/высоту, пока не будет достигнуто заранее определенное значение датчика, соответствующее желаемой жесткости. Однако предпочтительно регулирование жесткости осуществляется путем перехода в положение, которое было сохранено во время настройки или в режиме настройки параметров. Таким образом, подвижная часть может перемещаться, пока не будет достигнуто требуемое положение, высота и т.п. Альтернативно управление приводным блоком может осуществляться с целью достижения определенного числа оборотов или вращений и т.п. Также можно использовать счетчики импульсов и т.п.
Специалисту в данной области техники станет понятно, что данное изобретение никоим образом не ограничивается описанными выше предпочтительными вариантами осуществления. Напротив, в пределах объема прилагаемой формулы изобретения возможны различные модификации и вариации. Например, на участках можно использовать альтернативные элементы матраса, например, упругие элементы, выполненные из пенопласта, каучука, витых пружин, витых пружин в чехлах, надувных элементов и т.п. Кроме того, датчики могут быть реализованы различными способами, и различными способами может настраиваться блок управления.






Изобретение относится к конструкции кровати и направлено на повышение комфортабельности размещения пользователя на пружинной кровати. Конструкция кровати, обладающая адаптивными свойствами, содержит матрас, приводной блок, по меньшей мере один датчик и блок управления. Матрас содержит некоторое количество витых пружин, расположенных в отдельных чехлах для образования матраса с пружинными блоками, и содержит по меньшей мере один участок с независимо регулируемой жесткостью. Приводной блок предназначен для регулирования жесткости указанного по меньшей мере одного участка. Датчик предназначен для измерения физического параметра, который связан с лежачим положением, которое принимает пользователь. Блок управления предназначен для идентификации на основе входных сигналов от указанного датчика текущего лежачего положения пользователя, при этом лежачее положение может быть идентифицировано как одно из набора из по меньшей мере двух заранее определенных лежачих положений, и для управления приводным блоком с целью регулирования жесткости участка в соответствии с заранее заданным значением жесткости, соответствующим идентифицированному лежачему положению. 2 н. и 14 з.п. ф-лы, 17 ил.
1. Конструкция кровати, обладающая адаптивными свойствами, содержащая:
матрас, содержащий некоторое количество витых пружин, расположенных в отдельных чехлах для образования матраса с пружинными блоками, и содержащий по меньшей мере один участок с независимо регулируемой жесткостью;
приводной блок, предназначенный для регулирования жесткости указанного по меньшей мере одного участка;
по меньшей мере один датчик, при этом указанный датчик(датчики) предназначен для измерения физического параметра, который связан с лежачим положением, которое принимает пользователь; и
блок управления, предназначенный для идентификации на основе входных сигналов от указанного датчика(датчиков) текущего лежачего положения пользователя, при этом указанное лежачее положение может быть идентифицировано как одно из набора из по меньшей мере двух заранее определенных лежачих положений, и для управления приводным блоком с целью регулирования жесткости указанного участка(участков) в соответствии с заранее заданным значением(значениями) жесткости, соответствующим идентифицированному лежачему положению.
2. Конструкция кровати по п. 1, отличающаяся тем, что матрас содержит по меньшей мере два участка с независимо регулируемой жесткостью, предпочтительно по меньшей мере три участка и наиболее предпочтительно по меньшей мере пять участков.
3. Конструкция кровати по п. 1, отличающаяся тем, что участок(участки) с независимо регулируемой жесткостью простирается, по существу, на всю ширину матраса, и в продольном направлении матраса участки разделены.
4. Конструкция кровати по п. 1, отличающаяся тем, что набор заранее определенных лежачих положений включает по меньшей мере два и предпочтительно три лежачих положения, соответствующих положению пользователя лежа на спине, на животе и на боку.
5. Конструкция кровати по п. 1, отличающаяся тем, что датчики образуют плоскую и предпочтительно гибкую чувствительную оболочку, которая расположена поверх матраса.
6. Конструкция кровати по п. 5, отличающаяся тем, что чувствительная оболочка обладает полным электрическим сопротивлением, которое изменяется под воздействием вертикально направленной силы, приложенной к ней.
7. Конструкция кровати по п. 5, отличающаяся тем, что чувствительная оболочка содержит верхний гибкий электропроводящий лист, содержащий верхний проводящий элемент датчика, нижний гибкий электропроводящий лист, содержащий нижний проводящий элемент датчика, а также гибкий промежуточный слой, например пьезорезистивный слой, с активной чувствительной областью, полное электрическое сопротивление которой изменяется под воздействием вертикально направленной силы, приложенной к ней, при этом указанный промежуточный слой расположен между указанными верхним и нижним электропроводящими листами.
8. Конструкция кровати по п. 1, отличающаяся тем, что блок управления выполнен с возможностью работы в режиме настройки параметров, в котором можно определять и/или регулировать заранее заданные значения жесткости различных участков для различных лежачих положений.
9. Конструкция кровати по п. 8, отличающаяся тем, что в режиме настройки параметров можно определять и/или повторно определять набор заранее определенных лежачих положений.
10. Конструкция кровати по п. 9, отличающаяся тем, что при определении или повторном определении набора лежачих положений блок управления дополнительно предназначен для хранения сенсорных данных указанных датчиков, соответствующих указанным заранее определенным лежачим положениям, и для использования указанных сохраненных данных для различения заранее определенных лежачих положений в рабочем режиме.
11. Конструкция кровати по п. 1, отличающаяся тем, что дополнительно содержит пульт дистанционного управления, предназначенный для связи с блоком управления, и при этом указанная связь предпочтительно обеспечивается посредством интерфейса беспроводной связи.
12. Конструкция кровати по п. 1, отличающаяся тем, что блок управления предназначен для постоянной или периодической идентификации текущего лежачего положения пользователя на основе входных сигналов от указанных датчиков.
13. Конструкция кровати по п. 1, отличающаяся тем, что блок управления предназначен для идентификации текущего лежачего положения пользователя на основе входных сигналов от указанных датчиков, когда установлено, что входные сигналы от любого из датчиков были изменены по сравнению с последним сохраненным значением датчика от указанного датчика на величину, превышающую заранее определенное пороговое значение.
14. Конструкция кровати по п. 12 или 13, отличающаяся тем, что блок управления настроен на ожидание в течение определенного периода времени, после регистрации смены положения пользователем, прежде чем адаптировать жесткость в соответствии с новым лежачим положением.
15. Конструкция кровати по п. 1, отличающаяся тем, что блок управления предназначен для постоянной или периодической идентификации текущего лежачего положения пользователя на основе входных сигналов от указанных датчиков и настроен на ожидание в течение определенного периода времени в диапазоне 1-60 секунд, после регистрации смены положения пользователем, прежде чем адаптировать жесткость в соответствии с новым лежачим положением.
16. Способ автоматической настройки свойств конструкции кровати, включающий этапы:
предоставления матраса, содержащего некоторое количество витых пружин, расположенных в отдельных чехлах для образования матраса с пружинными блоками, и содержащего по меньшей мере один участок с независимо регулируемой жесткостью;
предоставления по меньшей мере одного датчика, при этом указанный датчик(датчики) предназначен для измерения физического параметра, связанного с лежачим положением, которое принимает пользователь;
идентификации на основе входных сигналов от указанного датчика(датчиков) текущего лежачего положения пользователя, при этом указанное лежачее положение может быть идентифицировано как одно из набора из по меньшей мере двух заранее определенных лежачих положений; и
регулирования жесткости указанного участка(участков) в соответствии с заранее заданными значениями жесткости, соответствующими идентифицированному лежачему положению.
| WO 2004080246 A1, 23.09.2004 | |||
| WO 2009120270 A2, 01.10.2009 | |||
| US 20030221261 A1, 04.12.2003 | |||
| УСТРОЙСТВА И СПОСОБЫ ОПРЕДЕЛЕНИЯ ОСОБЕННОСТЕЙ ЧЕЛОВЕКА ДЛЯ ИСПОЛЬЗОВАНИЯ В СПАЛЬНОЙ СИСТЕМЕ | 2008 |
|
RU2463936C2 |

