Изобретение относится к технике антенных измерений и может быть использовано для измерения диаграммы направленности (ДН) антенны.
Известно устройство, реализующее способ определения погрешностей измерения ДН антенны для их компенсации (а.с. SU №1770917 A1, G01R 29/10), включающее элементарный излучатель с изотропной ДН, установленный на поворотном блоке и подключенный через кабель к измерителю амплитуды и фазы, выход которого подсоединен к входу блока управления и обработки, выход которого подключен к входу управления поворотного блока. Поправку к ДН находят по формуле
 ,
,
где An и ϕn - амплитуды и фазы сигнала, принятого элементарным излучателем в точке с координатами {xn, yn}.
Существенный недостаток данного устройства состоит в том, что область его применения чрезвычайно узка: - измерение изотропных ДН.
Наиболее близким по технической сущности к заявляемому изобретению является выбранное в качестве прототипа устройство для измерения диаграммы направленности антенны (патент RU 2370781 C1, G01R 29/10), содержащее генератор сигнала, подключенный к входу вспомогательной антенны, последовательно соединенные смеситель, вход которого подключен к выходу исследуемой антенны, установленной на поворотном стенде, усилитель промежуточной частоты, пиковый детектор, вход которого подключен к усилителю промежуточной частоты, блок выборки-хранения, генератор качающейся частоты, первый выход которого подключен ко второму входу смесителя, а второй выход - ко входу «Сброс» пикового детектора и входу «Выборка» блока выборки-хранения, а также последовательно соединенные аналогово-цифровой преобразователь (АЦП), блок управления ЭВМ, причем вход АЦП подключен к выходу блоку выборки-хранения, а выход подключен к ЭВМ, первый управляющий порт ЭВМ - к блоку управления, последовательно подключенному к поворотному стенду, а второй управляющий порт ЭВМ подключен к генератору сигнала.
Недостатком данного устройства для измерения диаграммы направленности является снижение точности измерения ДН антенны в условиях, когда облучающее поле значительно отличается от плоской волны, например, из-за ограниченных габаритов измерительной камеры (вспомогательная антенна не может быть установлена на достаточно большом расстоянии) или из-за наличия отражений от стен камеры.
Технической задачей изобретения является устранение недостатков аналогичных решений за счет аппаратно-программного обеспечения, при котором становится возможным восстановление истинной ДН исследуемой антенны путем использования данных, полученных при вращении зонда с известной ДН.
Поставленная задача достигается тем, что в известное устройство для измерения диаграммы направленности антенны, содержащее генератор сигналов, подключенный к входу вспомогательной антенны, поворотный стенд, последовательно соединенные смеситель, усилитель промежуточной частоты, детектор, первый вход которого подключен к усилителю промежуточной частоты, аналогово-цифровой преобразователь, блок выборки и хранения, а также ЭВМ и блок управления, к которому подключен поворотный стенд, согласно изобретению введены зонд с точно известной ДН, выполненный с возможностью закрепления на поворотном стенде на расстоянии R от оси вращения, синтезатор частот и коммутатор, причем вход смесителя выполнен с возможностью подключения его к зонду, или к испытуемой антенне, детектор выполнен по схеме детектора комплексной огибающей с синфазным и квадратурным выходами, выход блока выборки-хранения через коммутатор подключен к двум портам ЭВМ ввода данных, первый управляющий порт ЭВМ соединен с синтезатором частот, к трем выходам которого подключены соответственно генератор сигнала, второй вход смесителя и вход опорного сигнала детектора, второй управляющий выход блока управления соединен с управляющим входом коммутатора и с управляющим входом блока выборки-хранения.
Сопоставительный анализ с прототипом показывает, что предложенное устройство для измерения диаграммы направленности антенны отличается наличием новых существенных признаков - введены зонд с точно известной ДН, коммутатор, синтезатор частот, детектор выполнен по схеме детектора комплексной огибающей, а программное обеспечение ЭВМ реализует алгоритм восстановления ДН испытуемой антенны путем совместной обработки результатов измерений, полученных с помощью зонда и испытуемой антенны.
Таким образом, заявляемое устройство соответствует критерию «новизна».
Анализ известных технических решений (аналогов) в исследуемой области и смежных с ней позволяет сделать вывод, что введенные элементы известны, однако наличие их в составе устройства указанным образом и с указанными связями образует аппаратно-программное средство, которое обеспечивает такое новое свойство, как возможность восстановления ДН испытуемой антенны в условиях, когда поле, облучающее область измерений, существенно отличается от плоской волны.
Изобретение соответствует критерию «изобретательский уровень», так как для специалиста оно не следует явным образом из уровня техники.
Изобретение является «промышленно применимым», так как оно может быть использовано при разработке и контроле характеристик разнообразных антенн систем радиосвязи.
На фиг. 1 приведена структурная электрическая схема устройства для измерения диаграммы направленности антенны: 1 - генератор сигналов, 2 - вспомогательная антенна, 3 - поворотный стенд, 4а - зонд с известной ДН, 4б - исследуемая антенна, 5 - смеситель, 6 - усилитель промежуточной частоты, 7 - детектор комплексной огибающей, 8 - аналогово-цифровой преобразователь, 9 - блок выборки-хранения, 10 - коммутатор, 11 - ЭВМ, 12 - блок управления, 13 - синтезатор частот.
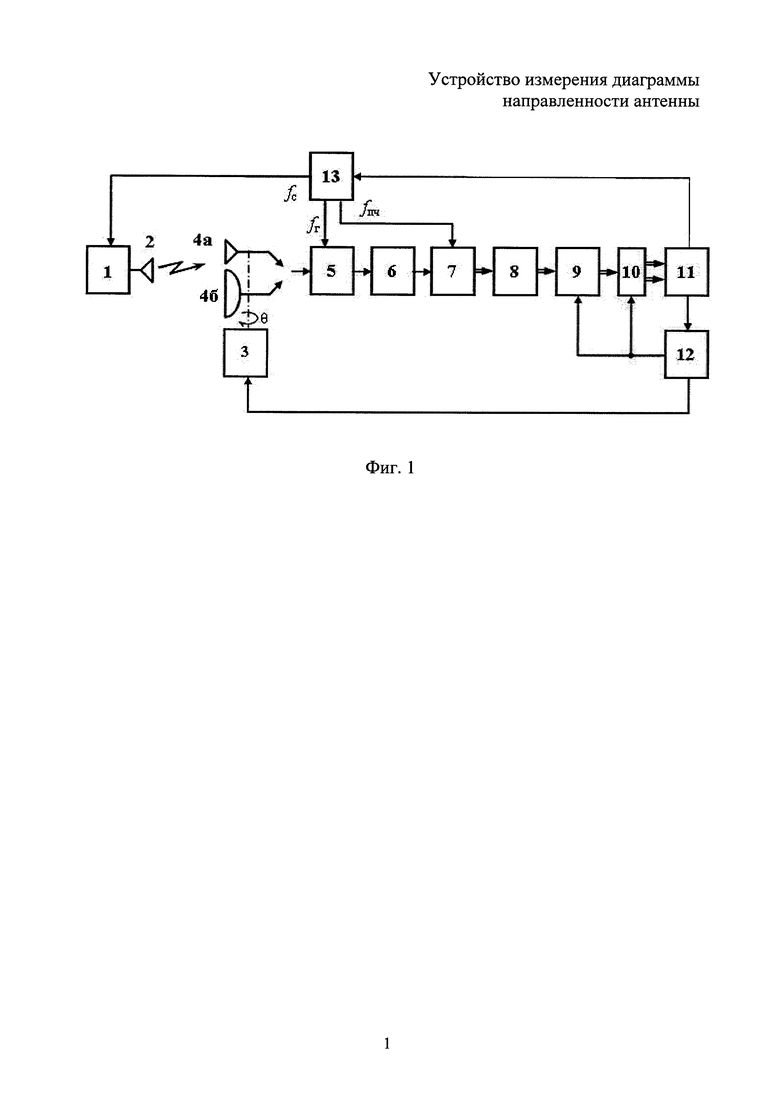
На фиг. 2 представлена блок-схема алгоритма обработки результатов измерений и восстановления диаграммы направленности исследуемой антенны.
Фиг. 3 поясняет геометрию и обозначения, использованные при моделировании этапа 1 измерений (тестирование облучающего поля с помощью зонда).
Фиг. 4 поясняет геометрию и обозначения, использованные при моделировании этапа 2 (измерение и восстановление ДН исследуемой антенны).
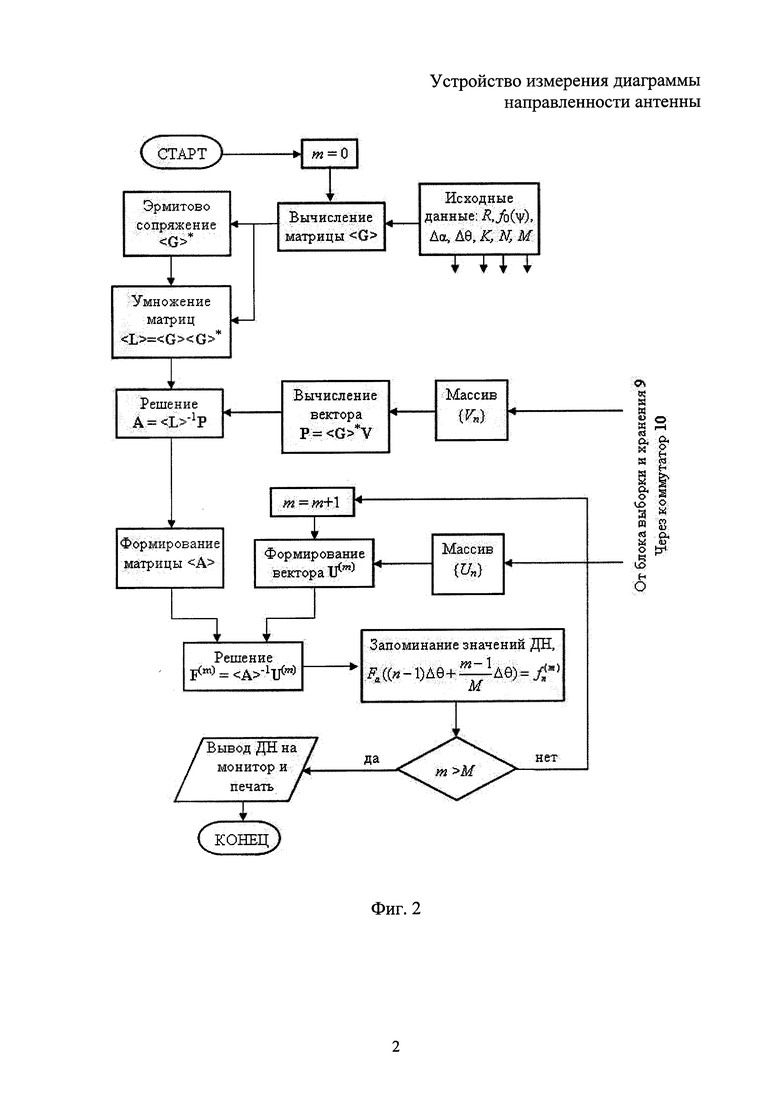
На фиг. 5 представлены результаты моделирования: серая жирная линия - измеренная ДН исследуемой антенны, черная жирная линия - восстановленная ДН исследуемой антенны, черная тонкая линия - точная ДН исследуемой антенны.
Устройство для измерения диаграммы направленности антенны включает генератор сигналов 1, подключенный ко входу вспомогательной антенны 2, поворотный стенд 3, зонд 4а с точно известной ДН, выполненный с возможностью фиксации на поворотном стенде 3 на расстоянии R от оси вращения, последовательно соединенные смеситель 5, вход которого выполнен с возможностью подключения или зонда 4а, или исследуемой антенны 4б, усилитель промежуточной частоты 6, детектор комплексной огибающей 7, выполненный по схеме детектора комплексной огибающей с синфазным и квадратурным выходами, аналогово-цифровой преобразователь 8, блок выборки-хранения 9, коммутатор 10 и ЭВМ 11, два входных порта которой подключены соответственно к двум выходам коммутатора 10, а также синтезатор частот 13, к трем выходам которого подключены соответственно генератор сигнала 1, второй вход смесителя 5 и выход опорного сигнала детектора 7, и блок управления 12. Первый управляющий порт ЭВМ 11 соединен с синтезатором частот 13, второй управляющий порт ЭВМ 11 соединен с блоком управления 12, первый управляющий выход которого соединен с поворотным стендом 3, а второй - с управляющими входами коммутатора 10 и блока 9 выборки-хранения.
Работа устройства для измерения ДН антенны состоит из трех последовательных этапов: тестирование облучающего поля (этап 1), тестирование исследуемой антенны (этап 2), восстановление ДН исследуемой антенны (этап 3) - и осуществляется следующим образом.
Первые два этапа выполняются однотипно и отличаются лишь тем, что именно закреплено на поворотном стенде 3: зонд 4а или испытуемая антенна 4б - и тем, на какой порт ЭВМ 11 поступают результаты измерений. По команде от ЭВМ 11 синтезатор 13 формирует на своих выходах соответственно сигнал рабочей частоты  , сигнал частоты гетеродина
, сигнал частоты гетеродина  и опорный сигнал промежуточной частоты
и опорный сигнал промежуточной частоты  . Подключенная к генератору 1 вспомогательная антенна 2 излучает сигнал заданной частоты
. Подключенная к генератору 1 вспомогательная антенна 2 излучает сигнал заданной частоты  , принимаемый соответственно зондом 4а на этапе 1 или исследуемой антенной 4б на этапе 2. ЭВМ 11 подает управляющий сигнал, соответствующий углу поворота θ, на вход блока управления 12. Блок управления 12 преобразует полученный управляющий сигнал в код и подает его на вход поворотного стенда 3, а также обеспечивает обнуление памяти блока 9 выборки-хранения при стартовом значении угловой координаты θ, и запись результатов измерений через коммутатор 10 в соответствующий массив оперативной памяти ЭВМ 11 по завершению полного оборота (или установленного сектора) вращения поворотного стенда 3.
, принимаемый соответственно зондом 4а на этапе 1 или исследуемой антенной 4б на этапе 2. ЭВМ 11 подает управляющий сигнал, соответствующий углу поворота θ, на вход блока управления 12. Блок управления 12 преобразует полученный управляющий сигнал в код и подает его на вход поворотного стенда 3, а также обеспечивает обнуление памяти блока 9 выборки-хранения при стартовом значении угловой координаты θ, и запись результатов измерений через коммутатор 10 в соответствующий массив оперативной памяти ЭВМ 11 по завершению полного оборота (или установленного сектора) вращения поворотного стенда 3.
Сигнал с выхода зонда 4а или исследуемой антенной 4б, пропорциональный их ДН, поступает на смеситель 5, на второй вход которого поступает сигнал частоты гетеродина  от синтезатора частот 13. Сигнал промежуточной частоты
от синтезатора частот 13. Сигнал промежуточной частоты  с выхода смесителя 5 поступает на усилитель 6 промежуточной частоты. Этот сигнал
с выхода смесителя 5 поступает на усилитель 6 промежуточной частоты. Этот сигнал  поступает на детектор 7, формирующий сигнал комплексной амплитуды S=Aejϕ=S'+jS'' в виде синфазной S'=Acos(ϕ) и квадратурной S''=Acos(ϕ) составляющих, для чего используется опорный сигнал
поступает на детектор 7, формирующий сигнал комплексной амплитуды S=Aejϕ=S'+jS'' в виде синфазной S'=Acos(ϕ) и квадратурной S''=Acos(ϕ) составляющих, для чего используется опорный сигнал  от синтезатора частот 13. Двойные линии на схеме (фиг. 1) обозначают тракты для комплексно-значных сигналов. При заданных угловых положениях {αk} поворотного стенда 3 оцифрованные с помощью АЦП 8 комплексные амплитуды {Sk} записываются в блок 9 выборки-хранения, откуда по завершении полного оборота стенда 3 через коммутатор 10 переносятся в соответствующий массив оперативной памяти ЭВМ 11. Для определенности обозначим массив, сформированный при вращении зонда, через {Vk}, а массив, сформированный при вращении исследуемой антенны, - через {Uk} (k=1…K).
от синтезатора частот 13. Двойные линии на схеме (фиг. 1) обозначают тракты для комплексно-значных сигналов. При заданных угловых положениях {αk} поворотного стенда 3 оцифрованные с помощью АЦП 8 комплексные амплитуды {Sk} записываются в блок 9 выборки-хранения, откуда по завершении полного оборота стенда 3 через коммутатор 10 переносятся в соответствующий массив оперативной памяти ЭВМ 11. Для определенности обозначим массив, сформированный при вращении зонда, через {Vk}, а массив, сформированный при вращении исследуемой антенны, - через {Uk} (k=1…K).
После выполнения этапов 1 и 2 инициируется исполнение программы обработки результатов измерений для восстановления ДН исследуемой антенны 4б, блок-схема алгоритма которой представлена на фиг. 2. Известен метод восстановления ДН (см. Чони Ю.И., Пироженко С.А. Восстановление ДН антенны по результатам измерений в неидеальных условиях // Известия вузов. Радиоэлектроника. 1992. т. 35, №2. С. 43-50), основанный на том, что реальное облучающее поле, т.е. поле вспомогательной антенны 2 (плюс отраженных волн, если они существуют), представляется в виде пучка плоских волн (фиг. 3). Неизвестные комплексные амплитуды волн пучка {An=A(θn)} определяются из условия, что реакция зонда 4а на пучок совпадает с результатами измерений. Это условие эквивалентно системе линейных алгебраических уравнений

где {αk=(k-1)Δα} - углы поворота стенда 3 с шагом Δα=2π/K, при которых осуществляются отсчеты комплексных амплитуд {Vk} сигналов, принимаемых зондом 4а;
 - известная ДН зонда 4а в системе координат, привязанной к нему (см. фиг. 3);
- известная ДН зонда 4а в системе координат, привязанной к нему (см. фиг. 3);
 - направления прихода плоских волн пучка, аппроксимирующего поле в области измерений, при выбранном их числе N и дискрете Δθ=2π/N;
- направления прихода плоских волн пучка, аппроксимирующего поле в области измерений, при выбранном их числе N и дискрете Δθ=2π/N;
сомножитель  учитывает фазовый набег, обусловленный вращением зонда 4а по окружности радиуса R, здесь
учитывает фазовый набег, обусловленный вращением зонда 4а по окружности радиуса R, здесь  - волновое число свободного пространства. Число точек {αk} (k=1…K), т.е. число уравнений системы (1), может быть больше выбранного числа N волн пучка.
- волновое число свободного пространства. Число точек {αk} (k=1…K), т.е. число уравнений системы (1), может быть больше выбранного числа N волн пучка.
Тогда система уравнений (1) решается известным методом наименьших квадратов (см. Гантмахер Ф.Р. Теория матриц. Изд. 5-е. - М.: Физматлит, 2004. 560 с.). Соответствующий алгоритм удобно представить в матричной форме. Обозначим матрицей <G> прямоугольную матрицу K*N коэффициентов  , вектором V - вектор-столбец, составленный из K коэффициентов Vk, а вектором А - вектор-столбец, составленный из N коэффициентов An. Тогда система уравнений (1) представляется компактной матричной записью
, вектором V - вектор-столбец, составленный из K коэффициентов Vk, а вектором А - вектор-столбец, составленный из N коэффициентов An. Тогда система уравнений (1) представляется компактной матричной записью

В рамках метода минимальных квадратов умножением слева на эрмитово сопряженную матрицу <G>* уравнение (1') сводится к системе N уравнений с N неизвестными

где <L>=<G>*<G> - квадратная матрица порядка N;
Р=<G>* V есть вектор-столбец размерности N, образованный коэффициентами  .
.
Решение матричного уравнения (1'') А=<L>-1 Р обеспечивает наилучшее среднеквадратичное приближение к вектору V правых частей уравнения (1). Существуют стандартные процедуры для его вычисления. Тем самым определяются комплексные амплитуды {Аn} пучка волн, при которых сигналы на выходе вращающегося зонда минимально (в среднеквадратичном смысле) отклоняются от измеренных значений {Vk}.
После вычисления комплексных амплитуд {Аn} пучка решается система N линейных алгебраических уравнений относительно значений Fa(ψ) ДН испытуемой антенны. Причем, если угловой дискрет Δα вращения испытуемой антенны при измерении сигналов {Uk} совпадает с дискретом пучка, то система уравнений имеет вид

где k=1…N.
Если в интересах восстановления ДН с более мелким дискретом дискрет ее вращения Δα установлен как доля дискрета Δθ, т.е. Δα=Δθ/M, то составляются и решаются М независимых систем уравнений с N неизвестными

где k=1…N, а m=1…М - это номер отсчета в пределах основного дискрета, который одновременно является порядковым номером системы уравнений. Физический смысл m-той системы уравнений прост (фиг. 4): в формировании сигнала Uk, принятого испытуемой антенной при конкретном угле αk ее поворота участвуют N волн пучка и значения ДН Fa(ψ) в направлениях, откуда приходят волны пучка.
Система уравнений (3) с номером m приводится к каноническому виду

где элементы akn квадратной матрицы <А> (k=1…N, n=1…N) формируются путем сдвига элементов вектора А по правилу  ; элементы
; элементы  вектора U(m) являются выборкой с шагом Δθ из массива измеренных комплексных амплитуд {Uk=U(αk)}, отсчеты которых могут иметь более мелкий шаг Δα=Δθ/М, a именно
вектора U(m) являются выборкой с шагом Δθ из массива измеренных комплексных амплитуд {Uk=U(αk)}, отсчеты которых могут иметь более мелкий шаг Δα=Δθ/М, a именно 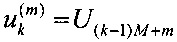 . Решение F(m)=<A>-1U(m) есть вектор из N элементов
. Решение F(m)=<A>-1U(m) есть вектор из N элементов  , являющихся отсчетами ДН испытуемой антенны с шагом Δθ и сдвигом на угол (m-1)Δα в пределах основного дискрета Δθ. Это соответствует записи
, являющихся отсчетами ДН испытуемой антенны с шагом Δθ и сдвигом на угол (m-1)Δα в пределах основного дискрета Δθ. Это соответствует записи  .
.
Технический результат изобретения иллюстрируют представленные на фиг. 5 результаты моделирования процесса обработки данных измерений в соответствии с алгоритмами (1)-(3). В качестве зонда использовался элемент с кардиоидной ДН  , который вращался по окружности радиуса R=4λ. На расстоянии D=14λ, располагался источник сферической волны. Сигнал зонда V рассчитывался по формуле V=[(1+cs)exp(-j2πr/λ)]/2r, где r=[((D-ξcos(α))2+(ξcos(α))2]1/2 - расстояние от точки D до текущего положения зонда (фиг. 3); cs=(Dcos(α)-R)/r есть значение косинуса угла между радиус-вектором α и направлением от зонда в точку D. С учетом размера 2R=8λ области измерений число волн пучка было выбрано равным N=60, чему соответствует угловой дискрет пучка Δθ=6°. Зонд вращался с дискретом Δα=1° (М=6). Система уравнений (1) решалась по методу наименьших квадратов.
, который вращался по окружности радиуса R=4λ. На расстоянии D=14λ, располагался источник сферической волны. Сигнал зонда V рассчитывался по формуле V=[(1+cs)exp(-j2πr/λ)]/2r, где r=[((D-ξcos(α))2+(ξcos(α))2]1/2 - расстояние от точки D до текущего положения зонда (фиг. 3); cs=(Dcos(α)-R)/r есть значение косинуса угла между радиус-вектором α и направлением от зонда в точку D. С учетом размера 2R=8λ области измерений число волн пучка было выбрано равным N=60, чему соответствует угловой дискрет пучка Δθ=6°. Зонд вращался с дискретом Δα=1° (М=6). Система уравнений (1) решалась по методу наименьших квадратов.
В качестве исследуемой рассматривалась линейная антенна длиной La=8λ, из синфазно и равномерно возбужденных элементов с кардиоидными индивидуальными ДН. Соответствующая ДН представлена тонкой черной линией, которая почти сливается с кривой, изображенной жирной линией.
Сигнал, принимаемый испытуемой антенной вычислялся как интеграл  , где ξ - координата вдоль испытуемой линейной антенны, cs=(Dcos(α)-ξ)/r, r=[((D-ξcos(α))2+(ξcos(α))2]1/2. Соответствующая угловая зависимость U(α) (измеренная ДН) представлена на фиг. 5 жирной серой линией. Ее разительное отличие от истинной ДН (тонкая черная линия) обусловлена тем, что облучатель (точка D=14λ) расположен слишком близко. Действительно, дальняя зона для рассматриваемой антенны начинается с расстояния 2(La)2/λ=128λ.
, где ξ - координата вдоль испытуемой линейной антенны, cs=(Dcos(α)-ξ)/r, r=[((D-ξcos(α))2+(ξcos(α))2]1/2. Соответствующая угловая зависимость U(α) (измеренная ДН) представлена на фиг. 5 жирной серой линией. Ее разительное отличие от истинной ДН (тонкая черная линия) обусловлена тем, что облучатель (точка D=14λ) расположен слишком близко. Действительно, дальняя зона для рассматриваемой антенны начинается с расстояния 2(La)2/λ=128λ.
Жирной черной линией изображена ДН, восстановленная в соответствии с алгоритмом (3). Для восстановления ДН с дискретом в 1° испытуемая антенна вращалась с этим дискретом. Соответственно в (3) фигурировало значение М=6.
При реализации элементов заявляемого устройства проблем не возникает.
Блок управления 12 обеспечивает цифровое управление поворотным стендом через последовательный порт от внешней ЭВМ и его реализация полностью повторяет прототип. Блок управления содержит микропроцессор с 10-битным аналогово-цифровым преобразователем и электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ). Последовательный порт может быть сконфигурирован для передачи сигналов с частотой от 1200 до 9600 бод. Блок управления содержит разъем DB9M для соединения с ЭВМ. Блок управления 12 выполнен на следующих микросхемах: MAXIM МАХ232СРЕ, TOSHIBA TD62083APG, Microchip PIC18C452-I/P, Microchip 24LC256-I/P, NEC 7805A.
Квадратурный детектор - это широко применяемый с системах связи элемент когерентной обработки сигналов (см. Глинченко А.С. Цифровая обработка сигналов. Красноярск: ИПК СФУ, 2008, с. 164, рис. 12.4. Доступен на сайте http://files.lib.sfu-kras.ru/ebibl/umkd/50/u_lectures.pdf). Он состоит из двух идентичных цепей, состоящих из последовательно соединенных умножителя входного сигнала на когерентный опорный сигнал и фильтра низких частот. Эти цепи отличаются тем, что их опорные сигналы сдвинуты по фазе на 90°.
Блок 8 АЦП выполняется на следующих микросхемах: КР142ЕН5А, КР1162ЕН5А, КР1533АП5, AD817AN, REF191GP(GS), AD586JR, AD826AN(AR), AD876AR.
Поскольку в рассматриваемом приложении нет жестких требований к объему памяти и скорости вычислений, то в качестве ЭВМ может использоваться персональный компьютер практически любой марки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2008 |
|
RU2370781C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК КРУПНОГАБАРИТНЫХ АНТЕНН ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ БЕЗ ИХ НЕПОСРЕДСТВЕННЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2541206C2 |
| СПОСОБ ИЗМЕРЕНИЯ КОМПЛЕКСНЫХ АМПЛИТУД ВОЗБУЖДЕНИЯ КАНАЛОВ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2267795C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 1992 |
|
RU2042140C1 |
| Устройство для измерения диаграммы направленности антенны | 1989 |
|
SU1617388A1 |
| Способ определения диаграммы направленности антенны | 1985 |
|
SU1357880A1 |
| АНТЕННО-СОГЛАСУЮЩЕЕ УСТРОЙСТВО | 2005 |
|
RU2308145C2 |
| ИЗМЕРИТЕЛЬ ПЕЛЕНГАЦИОННЫХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА - ОБТЕКАТЕЛЬ | 2010 |
|
RU2442181C1 |
| Способ определения диаграммы направленности и амплитудно-фазового распределения поля антенны и устройство для его осуществления | 1984 |
|
SU1332244A1 |
| Устройство для измерения параметров ФАР | 1990 |
|
SU1756838A1 |

Изобретение относится к технике антенных измерений и может быть использовано при измерении диаграммы направленности антенны в условиях, когда облучающее поле значительно отличается от плоской волны, например, из-за ограниченных габаритов измерительной камеры. Сначала по окружности радиуса R вращается зонд с точно известной диаграммой и в память ЭВМ заносятся комплексные амплитуды {Vn} принятых зондом сигналов. Затем повторяются измерения с исследуемой антенной, и запоминаются комплексные амплитуды {Un} принятых сигналов. После этого осуществляется обработка данных, суть которой состоит в том, что по значениям {Vn} восстанавливается облучающее поле как сходящийся пучок плоских волн. Затем вычисляется диаграмма направленности испытуемой антенны как та диаграмма направленности, которая в условиях найденного пучка волн порождает комплексные амплитуды {Un}. Технический результат, наблюдаемый при реализации заявленного технического решения, заключается в повышении точности измерений за счет аппаратно-программных средств. 5 ил.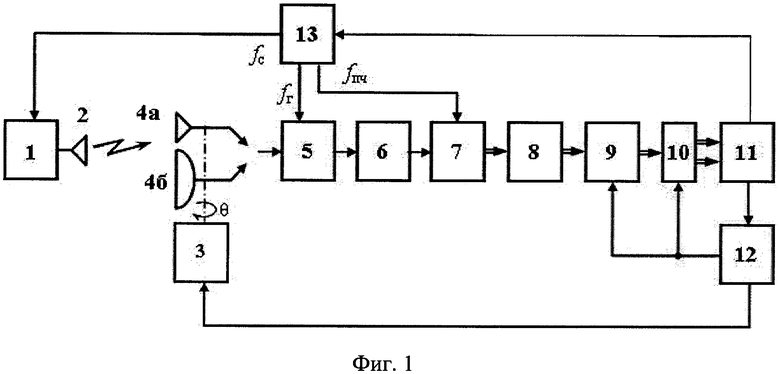
Устройство измерения диаграммы направленности антенны, содержащее генератор сигналов, подключенный к входу вспомогательной антенны, поворотный стенд, последовательно соединенные смеситель, усилитель промежуточной частоты, детектор комплексной огибающей, первый вход которого подключен к усилителю промежуточной частоты, аналогово-цифровой преобразователь, блок выборки и хранения, а также ЭВМ и блок управления, к которому подключен поворотный стенд, отличающееся тем, что введены зонд с точно известной диаграммной направленности, выполненный с возможностью закрепления на поворотном стенде на расстоянии R от оси вращения, синтезатор частот и коммутатор, причем вход смесителя выполнен с возможностью подключения его к зонду, или к испытуемой антенне, детектор выполнен по схеме квадратурного детектора с синфазным и квадратурным выходами, выход блока выборки-хранения через коммутатор подключен к двум портам ЭВМ ввода данных, первый управляющий порт ЭВМ соединен с синтезатором частот, к трем выходам которого подключены соответственно генератор сигнала, второй вход смесителя и вход опорного сигнала детектора; второй управляющий порт ЭВМ соединен с блоком управления, первый управляющий выход которого соединен с поворотным стендом; второй управляющий выход блока управления соединен с управляющим входом коммутатора и с управляющим входом блока выборки-хранения.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1991 |
|
RU2012003C1 |
| Статья: "ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ИЗЛУЧЕНИЯ АНТЕНН, ПОСТРОЕННЫХ НА ОСНОВЕ РЕБЕРНО-ДИЭЛЕКТРИЧЕСКОЙ ЛИНИИ", 2007 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2004 |
|
RU2279100C2 |
| US 2011304501 A1, 15.12.2011. | |||

