Представленное изобретение относится к способу и устройству для заполнения последовательных лотков для яиц на линии перемещаемых лотков для яиц. Основные его особенности более конкретно относятся к операции, которую в профессиональных кругах называют "стабилизацией", которая включает укомплектование степени заполнения лотков путем определения того, какие ячейки приема яиц лишены яиц в перемещающемся лотке (также называемом текущим лотком), и размещения в них яиц, которые берутся из хранилища доступных яиц. Это хранилище расположено снаружи линии транспортера лотков, последовательно подвергаемых операциям стабилизации. Оно может быть образовано из яиц, находящихся в определенном лотке из потока, который был выбран из входящего потока из стабилизационного узла устройства и который предназначен для опустошения его от яиц для этой цели.
Следует отметить, что на данном этапе обрабатываемые яйца не определяются иначе, чем дискретные объекты, которые распределены в лотках, поставляющих их. Только тогда, когда рассматриваются предпочтительные условия применения реализации изобретения, концепция яиц приобретает более конкретный смысл, отвечающий хрупким объектам, с которыми, как с куриными яйцами, следует обращаться бережно и правильно хранить в стабильном положении в содержащих их лотках. Дополнительно известно, что куриные яйца обрабатываются последовательно в очень больших количествах и очень быстром темпе, что может оправдать использование разработанного устройства, которое может не быть прибыльным в других приложениях.
Более конкретно, но без ограничений, изобретение рассматривает применения, в которых встречаются операции стабилизации в наиболее полном промышленном варианте реализации способа, после предварительного этапа по проверке состояния отдельных яиц, ведущего к удалению из каждого лотка с яйцами яиц, признанных негодными и неподходящими для последующего использования по назначению, при этом яйца, признанные годными, остаются в каждом лотке. Более конкретно, просвечивающие яйца устройства путем овоскопии используются для обнаружения является ли каждое из яиц, находящихся в лотке во время каждого цикла обработки последовательно перемещающихся лотков, оплодотворенным, и для удаления из цикла неоплодотворенных яиц, которые признаются негодными для последующих циклов обработки, поскольку, например, нет смысла в отправлении их в конечные пункты, предназначенные для оплодотворенных яиц, таких как инкубаторы, в которых вылупляются цыплята. Другие проверки соответствия могут относиться к внешней геометрической форме яиц.
Это демонстрирует заинтересованность в выполнении этапа стабилизации, делая возможным восполнить степень заполнения лотков до отправления их к следующему планируемому применению. Высокая степень заполнения лотков, в частности, желательна, если оплодотворенные яйца предназначены для использования в установках, где они получают продукт, такой как вакцина, вносимая в них путем инъекций. Это может включать как вакцинацию яиц, так и использование отдельных яиц в качестве культурной среды для выращивания вакцины. Важно, чтобы лотки, входящие в машину обработки яиц, были полными, и в то же время, содержащими только пригодные яйца, чтобы избежать потерь или неправильного использования дозы вакцины, так как инъекция выполняется индифферентно в каждой приемной ячейке лотка, таким образом, даже в пустых ячейках.
Состояние уровня техники в данной области частично отображено патентными документами FR 2912600, US 5898488 и EP 2377393. Необходимость в операциях стабилизации для улучшения заполнения лотка при каждом цикле обработки последующих лотков на линии обработки сама по себе известна; настоящее изобретение, таким образом, специально проверяет, как пригодные яйца берутся из накопителя доступных для этой процедуры яиц, и то, как они перемещаются для пополнения текущего лотка в его ячейках, не имеющих яиц.
Изобретение обеспечивает автоматизацию этих операций путем воздействия не через управление индивидуальным инструментом перемещения отдельно для каждого яйца для перемещений между накопителем доступных яиц, из которого оно изымается, и пустой ячейкой текущего лотка, в которую оно помещается, а скорее через управление механическими элементами специально сконструированного накопителя доступных яиц. Тем самым оно дает возможность гарантировать, что принимающие яйца ячейки в различных лотках заполняются корректно, в частности, в соответствии с заданными условиями, зависящими от степени заполнения каждого лотка, эффективно и надежно, без потерь времени в ритме обработки лотков на линии. Изобретение также приводит к обеспечению такой "стабилизации", избегая в то же время использования оборудования, которое будет сложным, дорогим, сложным в установке или проблемным в обслуживании.
В предпочитаемых вариантах реализации изобретения, последний относится к установке для заполнения последовательно перемещающихся лотков, в которой накопитель имеющихся в наличии яиц для заполнения пустых ячеек в стабилизируемом лотке изготовлен из ячеек, каждая из которых принимает яйца, которые свободно перемещаются под управлением устройства управления, которое автоматически регулирует движение для приведения их в конфигурацию накопителя, которая сама устанавливается автоматически на основании степени заполнения текущего лотка, определяя распределение пустых ячеек относительно заполненных ячеек. Расположение ячеек, содержащих яйца, в указанной конфигурации накопителя до переноса яиц, которые они содержат, может быть выполнено с преимуществом ряд за рядом в накопителе, в котором ячейки расположены в параллельных рядах и в котором, в каждом ряду, они закреплены с возможностью скольжения один за другим вдоль направляющей рельсы, которая направляет их движение.
В соответствии с одной особенно интересной особенностью данного изобретения, возможно реализовать способ для периодического заполнения накопителя пригодными яйцами из всех яиц из одного из перемещающихся лотков, выбранного для этой цели следующего выше по потоку от узла стабилизации. Таким образом, обеспечивается наполненность накопителя достаточным количеством яиц для корректного заполнения следующих в цепи перемещений лотков и выполняется это заполнение путем использования одного из лотков, который полностью опустошается до удаления его из линии обработки. В соответствии с одной из особенностей, дающих преимущество данному изобретению, способ может дополнительно включать этап перераспределения имеющихся в наличии в накопителе яиц путем удаления определенного количества яиц из ячеек ряда накопителя, который автоматически определяется как более укомплектованный, и для размещения яиц, извлеченных таким образом в ячейки ряда накопителя, который автоматически определен как менее укомплектованный.
Средства для переноса яиц между основной линией обработки следующих лотков и накопителем могут более конкретно состоять из захватывающей пластины, то есть пластины содержащей отдельные захватывающие устройства для яиц, размещенных в таком количестве столбцов и рядов, как и в каждом из последовательно перемещаемых лотков, имеющих места или ячейки для размещения яиц.
Перемещение и распределение ячеек в накопителе может выполняться с преимуществом путем использования гребня убираемых зубьев, расположенных вдоль линии привода через ряды ячеек. Такой гребень будет описан ниже как содержащий поддерживающий рычаг с закрепленными убираемыми зубьями, движимый в направлении, определяемом рядами ячеек в накопителе, и который укомплектован пальцами, реализующими убираемые зубцы, каждый из которых движим между развернутым положением, в котором он активен и служит приводом для ячейки накопителя, с которой он взаимодействует, и втянутым положением, в котором он неактивен, а точнее фактически в том, что отведен от всех ячеек, над которыми он проходит, когда гребень перемещается над сборкой при перемещении туда и обратно из одного конца накопителя в другой.
В соответствии с одним конкретным вариантом реализации такого накопителя с движимыми ячейками, каждая ячейка выполнена в форме чаши с полостью внутри корпуса, которая имеет плоские и параллельные боковые стенки, способные соприкасаться с другими сторонами чаши, в которой располагается яйцо, с противоположной стороной прилегающего корпуса ячейки. Ячейки, таким образом, прилегают сторонами друг к другу, гранича друг с другом в каждом ряду. Более того, каждый корпус ячейки содержит приводной язычок, с которым зубцы гребня могут вступать в контакт располагая себя напротив или за ними, выбор регулируется автоматически в зависимости от направления перемещения гребня, поэтому приводимая ячейка толкает остальные ячейки того же ряда с собой.
В соответствии с другими особенностями изобретения, ряды ячеек, принимающие доступные яйца, содержат количество ячеек большее, чем количество ячеек, принимающее яйца в каждой линии лотка. Накопитель может, таким образом, содержать область хранения ячеек, служащую для заполнения накопителя, когда он периодически пополняется новыми яйцами, эта область хранения отделяется от области загрузки, или области переноса, в которой содержащиеся яйца, доступные после перемещения ячеек в желаемой конфигурации будут удалены для переноса в лоток, проходящий обработку в узле стабилизации, и размещены в пустых ячейках этого лотка.
Изобретение будет более подробно описано в контексте предпочитаемых особенностей и преимуществ, описанных в данном документе в одном из его возможных вариантов реализации, с яйцами, со ссылками на фигуры 1-9, в которых:
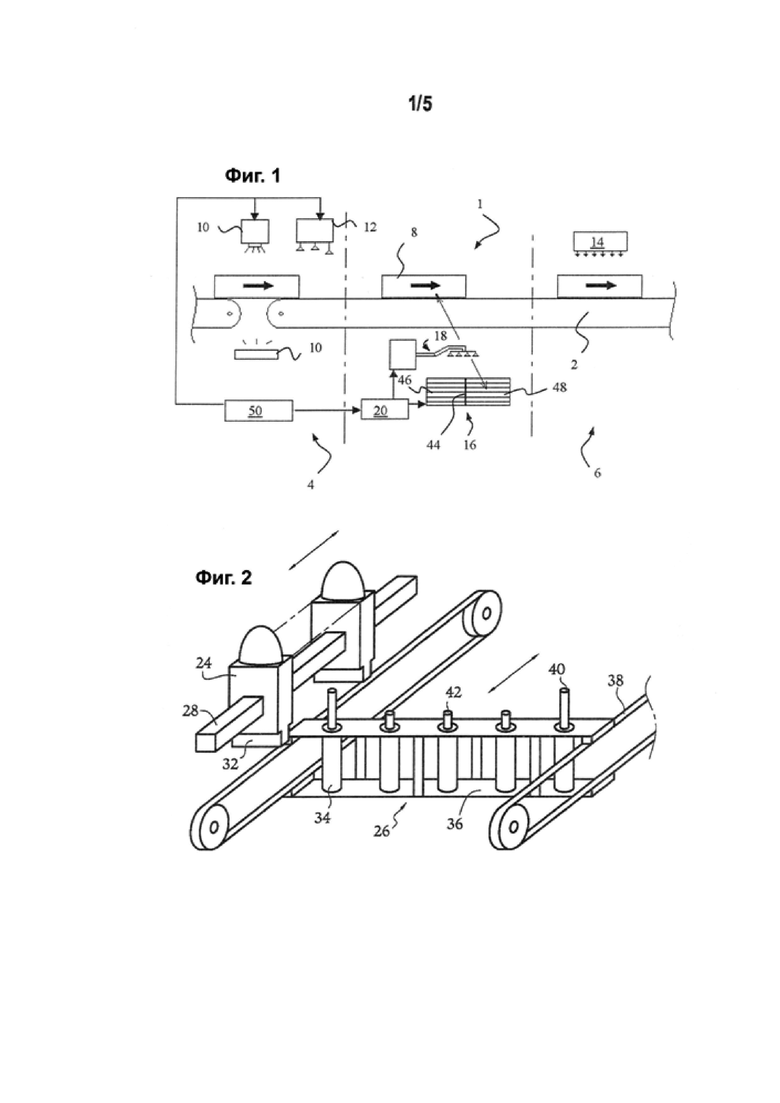
- фигура 1 является схематической иллюстрацией установки стабилизации, в данном случае расположенной между узлом овоскопа, на выходе из которого непригодные яйца удаляются, и узлом для введения вакцин в яйца, размещенных в лотках;
- фигура 2 является подробным изображением накопителя установки, проиллюстрированной на фигуре 1, частично показывающей две ячейки из одного ряда и связанные приводные средства, причем эти устройства проиллюстрированы с пальцами, расположенными в приводном положении, и пальцами в убранном неактивном приводном положении;
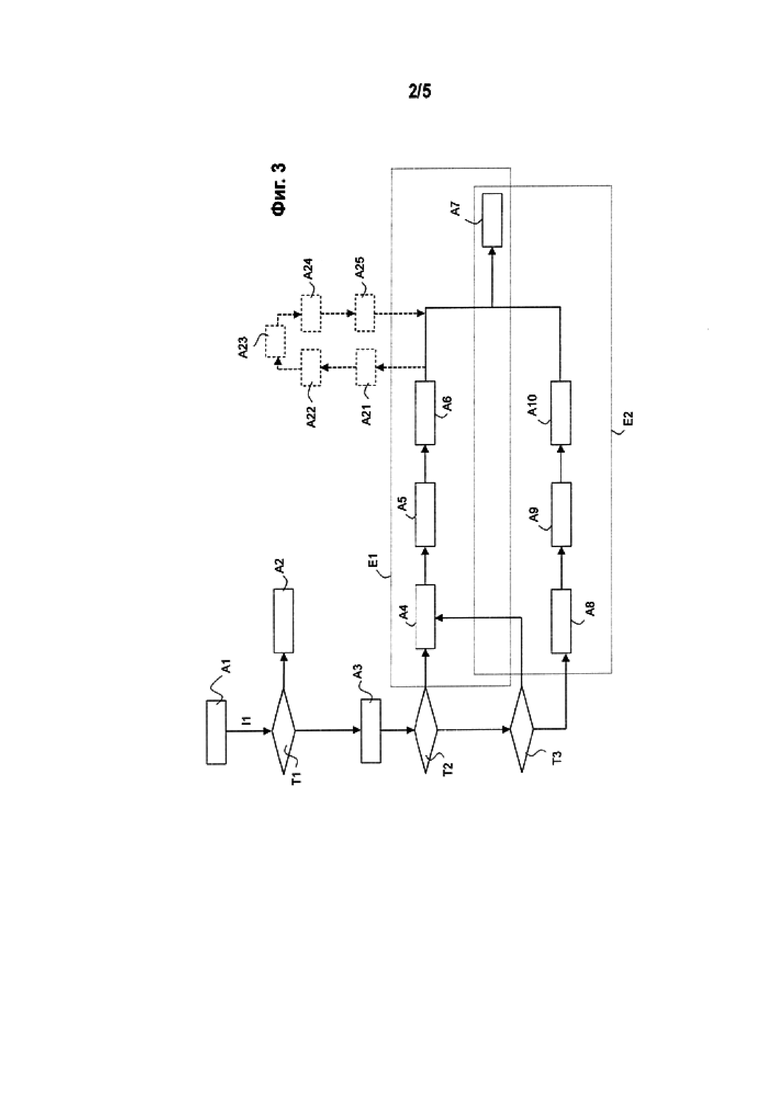
- фигура 3 является блок-схемой, иллюстрирующей последовательность этапов способа стабилизации в соответствии с изобретением, демонстрирующей, в пунктирных линиях, этапы способа, в случае оборудования установки дополнительными средствами перемещения, во втором варианте реализации изобретения установки;
- и фигуры 4-9 являются иллюстрациями этапов способа, соответствующего изобретению, с:
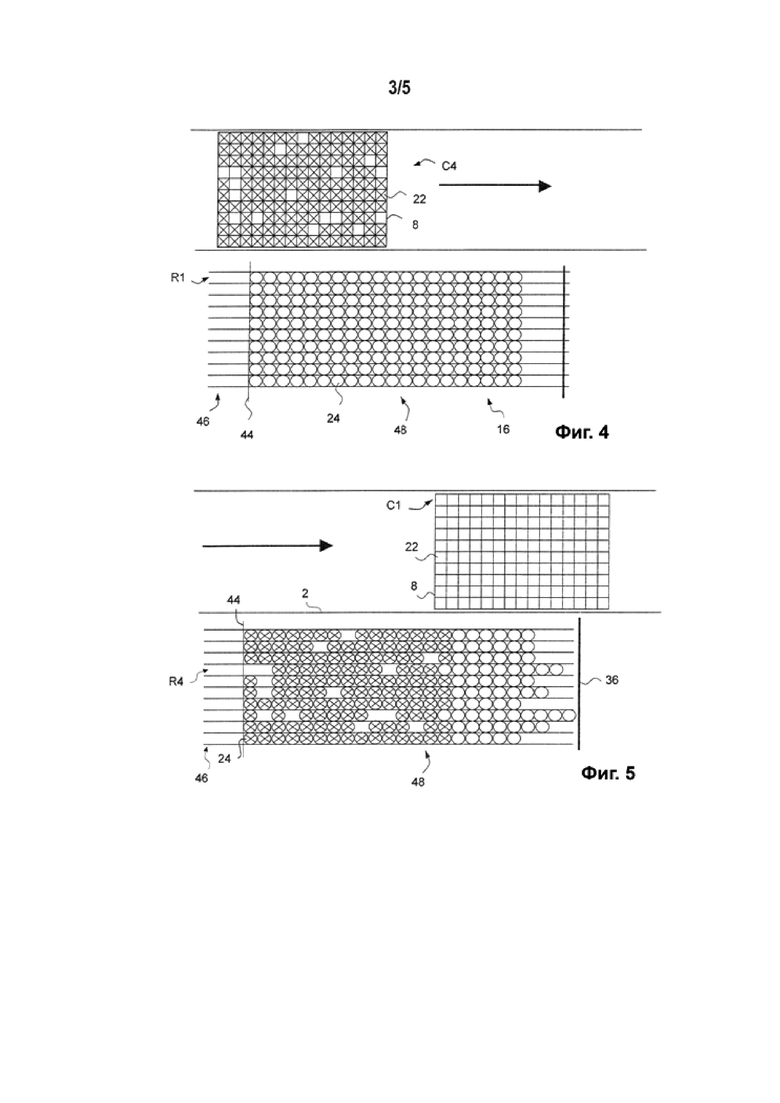
фигурами 4 и 5, иллюстрирующими начальное заполнение накопителя,
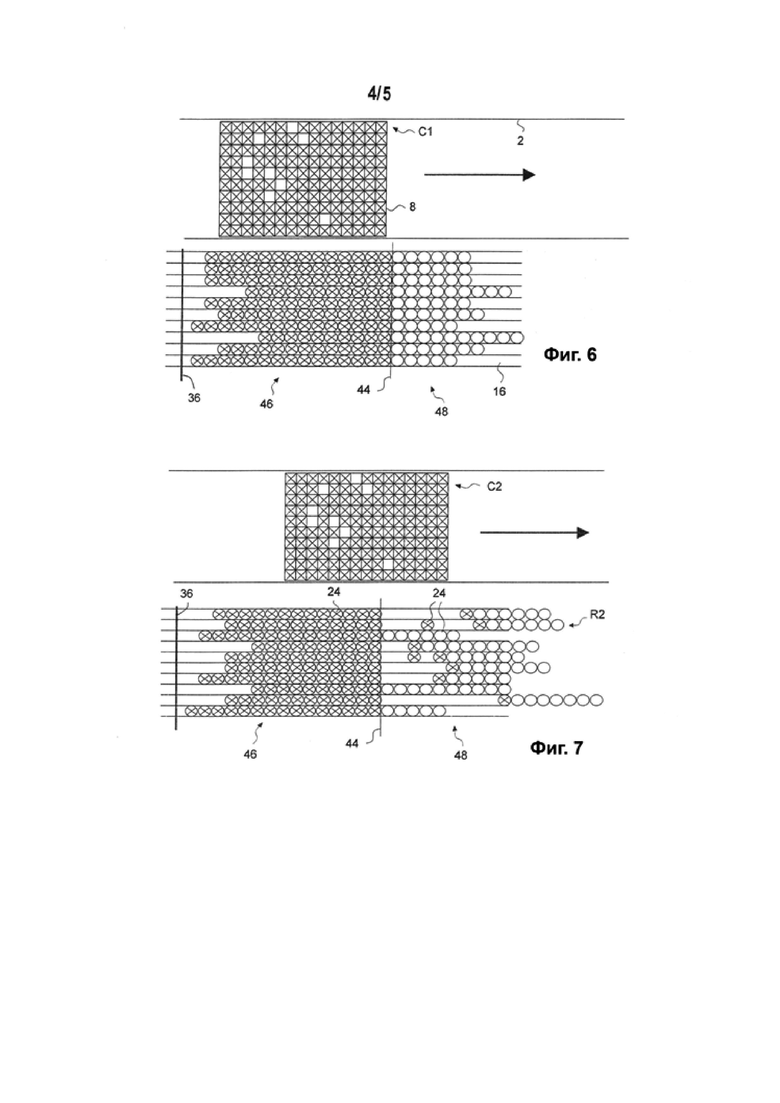
фигурами 6 и 7, иллюстрирующими один обычный случай заполнения лотка яйцами из накопителя,
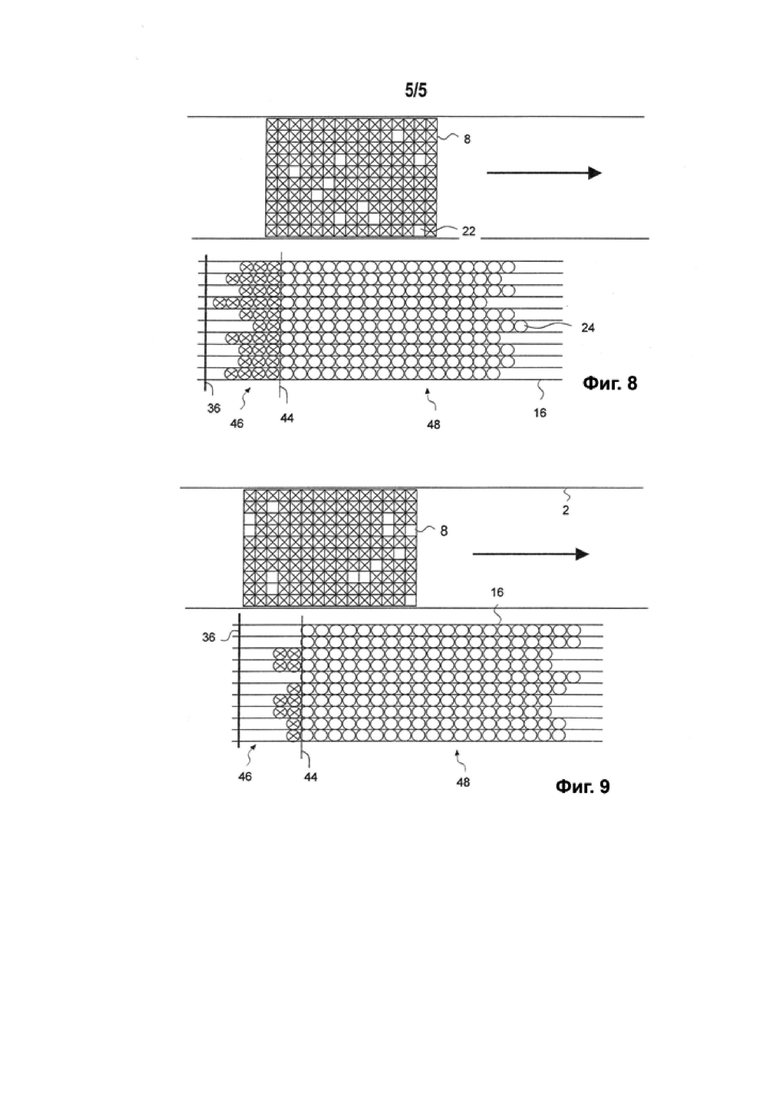
и фигурами 8 и 9, иллюстрирующими условия для пополнения накопителя,
фигура 8 соответствует случаю, в котором накопитель повторно не заполняется, в то время как фигура 9, напротив, иллюстрирует случай, при котором накопитель будет повторно заполняться.
В установке, соответствующей изобретению, подобной той, что проиллюстрирована в качестве примера на фигуре 1, узел стабилизации 1 расположен на линии транспортера 2, между узлом предварительной обработки яиц, проиллюстрированным как узел овоскопа 4, и узлом последующей обработки яиц, проиллюстрированным как узел введения вакцины 6. Лотки для яиц 8 приводятся транспортером в движение, один за другим, от узла овоскопа до входа в узел стабилизации и от его выхода к узлу введения вакцины. Узел овоскопа в данном изобретении содержит средства 10 для проверки путем овоскопии и захватывающих средств 12 для удаления любых яиц, признанных непригодными, из лотка, прошедшего перед средствами проверки. Узел обработки содержит средства введения вакцины 14, способные проникать отдельно в каждое яйцо, например, инокуляционные иглы для посева культуры, вакцины, имеющиеся в количестве и расположении, соответствующем ячейкам для яиц в лотке, сборка поддерживается удаленно управляемой платформой.
Мы предоставим более подробное описание узла стабилизации, характерного для изобретения, в котором он содержит накопитель 16 для пополнения яиц, который расположен параллельно транспортеру и в котором обеспечивается возможность использования пригодных яиц для наполнения каждого лотка, последовательно поступающего в узел стабилизации, а также передаточная пластина 18, способная переносить яйца между накопителем и лотками, перемещающимися вдоль линии транспортера, и устройство управления 20, в данном документе упоминается использование программных модулей, поскольку он управляет передаточной пластиной при операциях переноса яиц, перемещения и освобождения яиц, под автоматическим управлением программных модулей, сделанных из компьютерных программ, управляющих различными операциями для регулировки пластины перемещения на основании информации, относящейся к заполнению лотков, перемещающихся на транспортере.
Транспортер является обычным и, например, состоит из ремня транспортера для перемещения лотков, причем ремень последовательно обслуживает различные узлы установки. В данном документе уделяется большее внимание части транспортера, формирующей линию перемещения между узлом овоскопа и узлом обработки через узел стабилизации для обработки каждого перемещающегося лотка в последовательности лотков, перемещаемых через узел стабилизации.
Лотки 8 расположены на транспортере и перемещаются из одного узла в следующий, преимущественно с одинаковой частотой, установленной между каждым проходом. Лотки имеют ячейки для яиц 22, каждая из которых имеет пустоту в форме чаши для приёма яйца, различные ячейки располагаются в шахматном порядке прямоугольных рядов и линий, с Xc линий Yc ячеек. В каждом перемещающемся лотке, поступающем в узел стабилизации, определенные ячейки пусты, в частности после операции овоскопирования, при которой определяются непригодные яйца и удаляются из лотка. Распределение ячеек, определенных как пустые, и ячеек, которые полны, в которых яйцо присутствует, записывается в форме степени заполнения, которая характерна для каждого лотка и отличается от состояния заполнения предшествующего лотка и перемещающегося лотка.
Накопитель 16 располагается параллельно с транспортером, то есть он не расположен на линии на цепи передачи, но сбоку со стороны этой цепи, в положении, способствующем переносу яиц из накопителя в лоток линии обработки, или наоборот. Накопитель содержит движимые ячейки 24, каждая из которых сделана в форме корпуса ячейки в форме бруска с плоскими боковыми стенками с полостью внутри в форме чаши, принимающей яйцо, и с которым связано устройство управления, автоматически регулирующее приводное средство 26, двигающее различные ячейки.
Накопитель выполнен из Xr рядов Yr ячеек, и количество рядов накопителя определяется как количество, по меньшей мере равное количеству линий лотка, и количество ячеек в ряду как количество по меньшей мере равно, но предпочтительно большее, чем количество ячеек в линии. В проиллюстрированном варианте, количество Xc линий выбрано с преимуществом, равным количеству Xr рядов, с тем чтобы легко сделать n-ю линию лотка соответствующей n-му ряду накопителя. Здесь, это количество случайно равно десяти. Более того, в проиллюстрированных вариантах, выбрано, что накопитель создан из приблизительно на 33% большего количества ячеек, чем количество ячеек для яиц в лотке, таким образом, что, например, двадцать ячеек на ряд в накопителе для только пятнадцати ячеек на линию в каждом лотке.
Как проиллюстрировано на фигуре 2, ячейки поддерживаются направляющими рельсами 28, направляющими их движение, на которых они скользят под действием приводящих средств, регулируемых устройством управления. Каждый ряд ячеек в накопителе имеет соответствующей направляющий рельс, на котором последовательно закреплены Yr ячейки ряда. Под корпусом каждой ячейки 24 предусмотрен захват 32, выступающий вертикально из корпуса, перпендикулярно к оси направляющей рельсы. Этот захват расположен по всей ширине корпуса ячейки, но в предпочитаемом варианте реализации изобретения, описанном в качестве примера, он был кроме всего прочего оборудован так, что корпус ячейки в данном варианте имеет уменьшенное сечение в продольном направлении, формируя один рычаг сзади и другой спереди, таким образом, в случае если ячейки сжимаются последовательно друг к другу в ряду, между ячейками формируется углубление, делая возможным вставку приводящего штыря между ними
Приводящие средства 26 для ячеек различных рядов пролегают под сборками этих ячеек. Они содержат подъемное приспособление 34 для каждого ряда ячеек, все эти устройства поддерживаются поддерживающим рычагом 36, который пролегает через направляющие рельсы 28. Этот поддерживающий рычаг здесь поддерживается в его продольных концах двумя ремнями приводящих средств 38, так что рычаг может двигаться продольно под рядами ячеек. Приводящие средства моторизованы и регулируется автоматически с тем, чтобы двигаться в поступательном движении вперед и назад, из одного конца различных рядов ячеек к другому.
Рычаг 36, таким образом, поддерживает множество подъемных приспособлений, привод которых регулируется программными средствами устройства управления связанного с узлом стабилизации. Когда подъемное приспособление приведено в направлении введения в действие, палец кронштейна 40 выходит, пока не достигнет положения приведения в действие, в котором свободный конец пальца, здесь и далее называемый палец 42, выходит до высоты нижнего края ячеек. Перемещение рычага, в случае если подъемное приспособление, таким образом, приведено в действие, создается контакт соответствующего пальца с ячейкой, или более конкретно с приводным язычком, который выступает из корпуса электрода.
Следует понимать, что в случае, если приводящие средства двигаются ниже ячеек, пальцы подъемных приспособлений не касаются ячеек, если подъемные приспособления находятся во втянутом положении, и что если подъемное приспособление находится в положении приведения в действие (показано на фигуре 2 для подъемного приспособления, связанного с рядом, в котором были показаны ячейки), соответствующий палец толкает ячейку, с которой он находится в контакте. Поскольку палец остается в контакте с ячейкой, приводящие средства толкают эту ячейку, а также все ячейки, расположенные далее по направлению движения в этом ряду, которые тем не менее также двигаются вдоль рельсы, хотя ячейки в противоположном направлении от движения не двигаются.
Когда подъемное приспособление, связанное с рядом, убрано, палец более не пересекается с выступающими язычками ячеек этого ряда и более не выполняет функцию привода для этих ячеек. Последние останавливаются и сохраняют положение, в котором они были, когда подъемное приспособление было убрано. Будет очевидно, что ячейки соединяются для направления по рельсе путем соединения с возможностью скольжения, определяя то, что ячейки могут скользить по их соответствующей рельсе, если они проталкиваются приводящими устройствами, но они также могут останавливаться, поскольку подъемное приспособление убирается и соответствующий палец перестает их толкать. Будет возможно, например, использование специального материала, имеющего коэффициент трения, позволяющий поддержание такого механического эффекта.
Как проиллюстрировано на фигурах 6-9, возможно разделить две отличающиеся области накопителя, разделяемые разграничительной линией 44, которая пролегает виртуально через ряды накопителя. Первая область состоит из области хранения 46, в которой ячейки проталкиваются и группируются друг напротив друга, и вторую область, состоящую из области заполнения 48, или области переноса, в которой яйца доступны для переноса в перемещающийся лоток в узле стабилизации и в которой ячейки располагаются, ряд за рядом, не обязательно друг к другу и соприкасаясь друг с другом, с тем чтобы сформировать негативное зеркальное отображение лотка, поступившего в узел заполнения на транспортере, как будет описано ниже. Накопитель имеет такие размеры, что каждая из этих областей может пролегать на дистанции, эквивалентные Yc ячейкам лотка.
В направлении перемещения лотка, область переноса и область хранения расположены с одной стороны или с другой стороны разграничительной линии и приводящие средства и устройства перемещения откалиброваны на основании этого размещения областей с пониманием того, что передаточная пластина способна захватить яйца в области переноса. В проиллюстрированных примерах, в которых лотки перемещаются слева направо, область переноса располагается справа от разграничительной линии.
Передаточная пластина для яиц захватывает все яйца, доступные ей, без какого-либо отбора, вне зависимости в области переноса накопителя или в определенном лотке линии обработки. Она состоит из пластины, несущей инструменты для захвата яиц, в количестве равном количеству ячеек приема яиц в каждом лотке, и распределенных идентично распределению ячеек приема яиц в лотке, в данном случае в шахматном порядке. Тут, захватывающие инструменты состоят из втягивающих чашек, причем все одновременно соединены с вакуумным насосом, который служит приводом для захвата яиц, или альтернативно к линии сжатого воздуха впускного контура во втягивающих чашках для освобождения яиц и размещения их в их следующем месте. Эти захватывающие устройства сами по себе известны и не будут описываться здесь более подробно. Будет, однако, отмечено, что именно этот тип захватывающей пластины представляет интерес в контексте реализации настоящего изобретения, традиционно изготавливаемой в форме объединяющей устройства управления для втягивающих чашек, которые действуют по отдельности на каждой втягивающей чашке для открывания или перекрывания функции втягивания. В этом случае, в изобретении для управления предоставляется регулировка втягивающими чашками с учётом информации о конфигурации накопителя, поскольку он преобразуется на основании конфигурации перемещающегося лотка, предназначенного для заполнения, беря во внимание доступность яиц, находящихся в накопителе при каждом цикле заполнения лотка.
Передаточная пластина связана с программными средствами автоматического управления 20, которые определяют направление, в котором должен выполняться перенос яиц, то есть он включает захват яиц из лотка, проходящего обработку для размещения их в области хранения накопителя (лоток, таким образом, опустошается, далее отклоняясь от основной линии транспортера), или если противоположное должно быть выполнено, перенос яиц делается доступным в области переноса из накопителя в перемещающийся лоток для выгрузки в его пустые ячейки. С этой целью, устройства управления получают информацию о композиции перемещающемся лотке и количестве яиц, имеющихся в наличии, в каждом ряду накопителя, и отсюда делается вывод инструкций управления для рычага и приводящих устройств для распределения области переноса накопителя, до того как заполняется лоток и заполняется накопитель.
Программные средства управления 20, специальные для узла заполнения, соединяются со средствами сбора данных для получения данных относительно заполнения каждого последовательно поступающего лотка, и/или программные средства 50, специализированные для узла овоскопа, и они дополнительно соединяются с механическими компонентами узла заполнения для регулировки их работы, то есть передаточной пластиной 18 и приводящими устройствами накопителя 26.
Мы сейчас представим функциональное описание изобретения на основании диаграммы фигуры 3 и иллюстрации различных этапов на фигурах 4-9, обозревая способ этапов, в соответствии с которыми заполняются лоток или накопитель, на основании количества яиц, присутствующих в текущем, и количества яиц, присутствующих в накопителе, каждый раз делая линию приемных ячеек перемещающегося лотка соответствующей ряду ячеек в накопителе. Как проиллюстрировано на фигурах 4-9, линия C1 лотка заполнена или опустошена относительно количества яиц, находящихся в ряду R1 накопителя, и n-я линия Cn заполнена или опустошена относительно количества яиц, находящихся в n-м ряду Rn накопителя.
Как проиллюстрировано на диаграмме по фигуре 3, программные средства устройства управления автоматически рассчитывают количество яиц, которое будет извлечено из накопителя для заполнения каждого лотка, так же как и конфигурация, в которой ячейки, поддерживающие эти яйца, должны быть расположены так, чтобы устройства перемещения могли правильно разместить яйца в каждой пустой ячейке лотка. Более того, они автоматически определяют, присутствует ли ситуация, между двумя циклами заполнения текущего лотка, для периодического пополнения яйцами накопителя заполнением его пустых ячеек из перемещающегося лотка, пришедшего на узел стабилизации, из которого яйца, которые он содержит, удаляются. Устройством управления автоматически принимается решение, является ли текущее время подходящим для выполнения такого пополнения и какой лоток выбрать для опустошения для этой цели, в частности беря во внимание конфигурацию накопителя в ячейках, содержащих яйца, и состояние заполнения текущего лотка, который должен скоро проследовать с заполненными ячейками.
Когда лоток поступает на узел стабилизации (действие A1), после выхода из механизма овоскопа, который предшествует на пути следования лотков на транспортере, информация I1, относящаяся к содержанию этого лотка, то есть его конфигурация в смысле присутствия или отсутствия яиц в каждой из ячеек, посылается на устройство управления от специальных программных средств для механизма овоскопа, путем которого непригодные яйца удаляются из лотка в зависимости от результата овоскопирования. Эта информация отправляется модулю автоматического управления, связанного с установкой, может также приходить от специальных фотодатчиков ячеек для установки и способных определять информацию о состоянии заполнения лотка.
Первое тестирование T1 выполняется программными средствами на основании этой информации. Если лоток пуст, ничего не выполняется (действие A2) и лоток выгружается на выходе узла заполнения, так что он не попадает в узел введения вакцины. Если лоток не пуст, программные средства вычисляют (действие A3) количество яиц в линии, которое необходимо для укомплектования до уровня заполнения лотка, соответствующего техническим условиям. Второй тест T2 далее выполняется на основании этих расчетов и на основании информации, принадлежащей программным средствам относительно количества яиц, присутствующих в ряду накопителя. Если накопитель содержит достаточное количество яиц на ряд для заполнения соответствующих линий перемещающегося лотка, ссылаясь на предварительно определенный порог заполненности, строго говоря, выполняется этап E1 для заполнения лотков.
На этом этапе E1, программные средства анализируют распределение лотка на основании информации о конфигурации изначально полученного содержания (действие A4), и из этого делается вывод инструкций управления для приводящих устройств, так что последнее расставляет (действие A5) ряд накопителя так, чтобы ячейки, содержащие яйца, находящиеся в области переноса накопителя, формировали комплементарное изображение распределения яиц, находящихся в текущем лотке, то есть противоположное изображение, на котором каждая пустая ячейка лотка соответствует заполненной ячейке накопителя, и наоборот.
В качестве примера рассмотрим случай, проиллюстрированный на фигурах 4 и 5, в которых перемещающийся лоток имеет несколько пустых ячеек, содержит первую ячейку, расположенную в первом ряду и седьмом столбце, вторую ячейку, расположенную во втором ряду и четвертом столбце, и третью ячейку, расположенную во втором ряду и восьмом столбце. Область переноса накопителя далее распределяется путем приводящих устройств под управлением программных средств, так что первая ячейка, содержащая яйцо, располагается в первом ряду накопителя, на расстоянии от разграничительной линии эквивалентном толщине семи ячеек, вторая ячейка, содержащая яйцо, располагается во втором ряду накопителя, на расстоянии от разграничительной линии, эквивалентном толщине семи ячеек, и третья ячейка содержащая яйцо располагается во втором ряду накопителя, на расстоянии от разграничительной линии, эквивалентном толщине восьми ячеек. Дополнительно можно заметить, что приводящие средства не двигают ячейки в третьем ряду и оставляют их все в области хранения, поскольку перемещающийся лоток не имеет пустых ячеек в своей третьей линии.
Таким образом, накопитель сконфигурирован на основании распределения яиц в перемещающемся лотке. Ниже, мы предоставим более подробное описание того как приводящие средства и управление ими путем программных средств, которое делает возможным выполнение этого конфигурационного этапа накопителя относительно формы лотка, наполнение которого закончено.
Передаточная пластина далее захватывает и переносит (действие A6) все яйца, расположенные в области переноса накопителя в лоток. Распределение яиц, когда они захватываются в области переноса, сохраняется во время переноса, так что каждое захваченное яйцо располагается в пустых ячейках перемещающегося лотка, распределение яиц в области переноса до их захвата передаточной пластиной было негативным зеркальным отражением лотка, приводя ячейки, содержащие яйца, в соответствие пустым ячейкам лотка.
После переноса, приводящие средства, связанные с накопителем, управляются программными средствами (действие A7), так что ячейки, содержащие яйца проталкиваются друг за другом, в ряду, в области хранения, причем ячейки в каждом ряду проталкиваются больше или меньше так, чтобы ряды выравнивались по разграничительной линии между областью хранения и областью переноса (показано на фигурах 6, 8 и 9).
Так как результат второго теста T2 указывает, что накопитель не содержит достаточное количество яиц на ряд для заполнения соответствующих линий перемещающегося лотка со ссылкой на соответствующий указанный порог заполнения, третий тест T3 проводится для определения, имеет ли накопитель достаточное количество пустых ячеек, ряд за рядом, для размещения всех яиц, находящихся в перемещающемся лотке. Если результат положительный, то есть накопитель имеет достаточное количество пустых ячеек, ряд за рядом, для размещения всех яиц, находящихся в лотке, этап E2 проводится для пополнения накопителя, как будет описано ниже.
Такой случай проиллюстрирован на фигуре 9, которая демонстрирует лоток, поддерживающий 15 яиц в первой линии и 12 яиц в восьмой линии, и накопитель с двадцатью пустыми ячейками в первом ряду и восемнадцатью пустыми ячейками в восьмом ряду, каждый ряд накопителя имеет по меньшей мере такое же количество пустых ячеек, как и количество яиц, присутствующих в соответствующей линии перемещающегося лотка. Напротив, если результат теста T3 негативный, этап E1 проводится снова для заполнения лотка, как было описано ранее, разрешая операцию заполнения пониженного качества, при которой порог заполненности не достигается. Такой случай негативного результата теста проиллюстрирован на фигуре 8, которая демонстрирует лоток, поддерживающий 14 яиц в первой линии и 15 яиц в четвертой линии, и накопитель с шестнадцатью пустыми ячейками в первом ряду и четырнадцатью пустыми ячейками в четвертом ряду. Фактически этот четвертый ряд накопителя имеет меньшее количество пустых ячеек, чем количество яиц, присутствующих в соответствующей линии перемещающегося лотка, делая невозможным общий перенос яиц из лотка в накопитель и делая этап заполнения невозможным.
Следует понимать, что расположение этапов и тестов, как проиллюстрировано на фигуре 3, стремится способствовать оптимальному заполнению лотков накопителя и не приемлет заполнение пониженного качества, то есть с большим количеством лотков, оставшимися незаполненными после заполнения, чем желает пользователь, за исключением, когда периодический этап заполнения накопителя не может быть проведен. Таким образом, этапы заполнения лотка следуют друг за другом, при каждом цикле обработки перемещающегося лотка, поскольку накопитель не имеет достаточное количество пустых ячеек для размещения всех яиц текущего перемещающегося лотка. Когда это случается, этап заполнения E2 для заполнения накопитель прерывается серией этапов заполнения лотка.
Этап заполнения накопителя E2 как следует. Программные средства рассчитывают положение ячеек данных ряд за рядом для размещения всех яиц из текущего лотка (Действие A8). Для правильной работы накопителя при операциях заполнения будущих лотков ни одна ячейка ряда, после заполнения накопителя яйцами из лотка, не должна оставаться пустой выше от ячейки, поддерживающей яйцо. Программные средства далее выполняют инструкции управления (Действие A9) для разделения отдельных ячеек в ряду, как показано на фигуре 4, так что это расстояние, оставляемое пустым между двумя ячейками, соответствует ячейке перемещающегося лотка, которая не содержит яйцо.
Как можно увидеть при изучении фигуры 5, распределение яиц, захваченных в перемещающемся лотке передаточной пластиной (действие A10), сохраняется до размещения в накопителе, и приводящие средства, связанные с накопителем, далее применяются для того, чтобы ячейки вдоль толкали друг друга, в ряду, в область хранения, с тем чтобы не оставлять пустого места в области хранения с отсутствующим яйцом между двумя ячейками, поддерживающими яйцо.
Сейчас мы опишем операции конфигурирования накопителя относительно формы перемещающегося лотка. Такое конфигурирование имеет место, как можно заметить при чтении предшествующего описания, как перед заполнением лотка и перед заполнением накопителя всеми яйцами из лотка. В этом подробном описании, мы ссылаемся на случай, проиллюстрированный на фигуре 7, в котором накопитель конфигурируется так, чтобы область переноса сформировала негативное изображение обрабатываемого лотка, показанного на фигурах 6 и 7.
В этом случае, программные средства определяют, как каждый из рядов лотка должен быть заполнен, то есть здесь для первых трех линий, по одному яйцу в седьмой ячейке первой линии, одному яйцу в четвертой ячейке во второй линия, и одному яйцу в восьмой ячейке второй линии.
Приводящие средства будут толкать ячейки накопителя, ряд за рядом, для конфигурирования области переноса как негативного изображения лотка, подлежащего заполнению. Приводящие средства, управляемые программными средствами, в частности, разместят яйцо в первом ряду на расстоянии от разграничительной линии, эквивалентном семи ячейкам лотка, одно яйцо во втором ряду на расстоянии от разграничительной линии, эквивалентном четырем ячейкам лотка, одно яйцо во втором ряду на расстоянии от разграничительной линии, эквивалентном восьми ячейкам лотка, и ни одного яйца в третьем ряду.
Поддерживающий рычаг убираемых штырей (гребень) двигается по оси вдоль рядов между положением первого конца, проходя область хранения, как проиллюстрировано на фигуре 6, и вторым положением, проходя область переноса, как проиллюстрировано на фигуре 7. Подъемные приспособления приводятся в действие независимо друг от друга в соответствии с распределением по каждому данному ряду, с которым они связаны.
В проиллюстрированном случае, подъемные приспособления связаны с первым и вторым рядами (зубья гребня), непосредственно приводятся для толкания их ряда ячеек, поскольку яйца должны быть извлечены из этих рядов, в то время как подъемное приспособление, связанное с третьим рядом, не приводится в действие, поскольку нет яиц, которые следует удалять из этого ряда.
Роль приводящих устройств состоит в движении ячеек из области хранения в область переноса ряд за рядом, по отношению к прилегающей ячейке, также оставляя одну или более ячеек свободными или сдвигая ячейки друг к другу.
Приводящие средства выполняют первое приводящее действие, которое включает, для каждого ряда, упреждающий набор яиц на расстояние, соответствующее количеству яиц, которые будут извлечены из этого ряда, и располагают эти яйца в области заполнения (также называемой область переноса), заставляя их пройти виртуальную разграничительную линию. В описанном примере, одно яйцо должно быть взято из первого ряда, так что подъемное приспособление приводится в действие, сцепляясь с этой ячейкой на время перемещения приводящим средством на расстояние, соответствующее продольной толщине ячейки. Все ячейки проталкиваются последовательно из-за влияния воздействия пальца относительно ячейки, находящейся в начале последовательности, наиболее удаленной от разграничительной линии, поэтому ячейка в хвосте ряда, наиболее близкая к разграничительной линии, проходит её, соответствующее яйцо обнаруживается в область переноса. Подъемное приспособление далее регулируется так, чтобы палец занял втянутое положение, чтобы ячейки в этом ряду не толкались более и остались в своем положении. Подъемное приспособление проходит под ячейками, поддерживаемое поддерживающим рычагом. Будет очевидно, что в то же время, подъемное приспособление, связанное с третьим рядом, не приводится в действие, поскольку, в конечном счете, здесь нет яиц, которые следует убрать из этого третьего ряда, и поскольку подъемное приспособление, связанное со вторым рядом, приводилось для толкания всех ячеек на расстояние, соответствующее продольной толщине двух ячеек, поскольку два яйца должны быть извлечены из этого второго ряда. Здесь снова подъемное приспособление, связанное со вторым рядом, регулируется так, чтобы палец принял втянутое положение и мог проходить под ячейками.
Второе приводящее действие выполняется, как только поддерживающий рычаг (гребень) проходит виртуальную разграничительную линию. Второе приводящее действие должно сделать возможным распределение правильно в области переноса яиц, вытолкнутых из области хранения во время первого приводящего действия. Подъемные приспособления приводятся в действие в соответствии с распределением, данным связанному с ними ряду. Программные средства устройства управления определяют расстояние, на котором полные ячейки должны быть размещены от разграничительной линии, для формирования зеркального изображения желаемого для области переноса. Они, таким образом, определяют последовательные цели, в которых будут помещаться ячейки в том же ряду. Палец размещается в вытянутом положении для толкания ячейки(ек), которые следует разместить в этом ряду, и палец остается в этом вытянутом положении, пока ячейка, которую он толкает, не станет в первую определенную цель, наиболее близкую к разграничительной линии. Для размещения ячейки, программные средства вызывают втягивание пальца подъемного приспособления, далее, когда поддерживающий рычаг продвигается по длине ячейки, палец опять вытягивается в вытянутое положение и снова начинает двигать , пока ячейка, которую он толкает прямо, не станет в следующую цель.
В примере ранее описано подъемное приспособление, связанное со вторым рядом, приводится в действие от разграничительной линии так, что две ячейки, выбранные для прохождения этой линии, проталкиваются на расстояние, эквивалентное четырем ячейкам, так что ячейка, приводимая прямо штырем подъемного приспособления, то есть хвостовая ячейка, ближайшая к разграничительной линии до второго приводящего действия, становится расположенной на первой цели, соответствующей ранее определенному положению яйца во втором ряду на расстоянии от разграничительной линии, эквивалентном четырем ячейкам лотка. Палец далее убирается, пока поддерживающий рычаг продолжает движение под ячейками, и выдвигается сразу после прохождения ячейки, которая одна должна остаться на месте, с тем чтобы войти в контакт со второй ячейкой, для ее последующего размещения на второй цели.
Таким образом, гребень с убираемыми зубьями, сформированный набором поддерживающих рычагов и управляющих подъемных приспособлений для соответствующих штырей, управляется в соответствии с логикой, с тем чтобы расположить каждую ячейку в правильном положении в ожидании захвата передаточной пластиной. Будет очевидно, что эти перемещения приводящих устройств осуществляются при желании разместить пустые ячейки правильно для получения яиц из лотка на этапе заполнения накопителя, или расположить заполненные ячейки для пополнения следующих лотков для яиц.
После операции перемещения, гребень, завершив свое перемещение, перемещается к концу накопителя, забирая с собой все ненужные ячейки, обнаруженные в каждом ряду последовательных ячеек, до того как последняя ячейка была оставлена на месте в области переноса строго говоря (на которой работает передаточная пластина), убираемые пальцы снова приводятся в действие, но это в данном случае для взаимодействия с ячейкой в начале последовательности в каждом из рядов. Поддерживающий рычаг получает команду на начало своего перемещения в обратном направлении своего поступательно-возвратного перемещения, и пальцы примыкают за захватами приводов первой ячейки, встретившейся в различных рядах, которые все приводятся в действие в направлении другого конца накопителя, напротив линии привода далее реализуется гребнем. Приводящие средства снова пересекают накопитель из одного его конца в другой, за исключением того, что подъемные приспособления приводятся в действие постоянно для толкания и размещения ячеек напротив друг друга, пустые или полные в зависимости от предшествующих операций. Если операция заполнения лотка предшествовала этому, область переноса содержит ячейки, которые остались пустыми, и приводящие средства толкают их к полным ячейкам, оставшимся в области хранения, пока не будет обеспечено (путем команд втянуться пальцам подъемных приспособлений в соответствующий момент) то, что полные ячейки останутся в конфигурации, при которой каждый ряд имеет полную ячейку на границе виртуальной разграничительной линии, как проиллюстрировано на фигуре 6, например. Если операция пополнения накопителя предшествовала этому, приводящие средства толкают ячейки, пока они не займут такую же конфигурацию по фигуре 6, в которой каждый ряд имеет полную ячейку на границе виртуальной разграничительной линии.
Второй вариант реализации изобретения может быть описан со ссылкой на фигуру 3 и элементы блок-схемы, добавленной в пунктирных линиях. Он отличается от первого варианта реализации изобретения в основном тем, что предусмотрены вторые устройства переноса яиц, называемые "локальными”, в дополнение к первым устройствам перемещения, формируемым передаточной пластиной описанной ранее. Локальные устройства перемещения имеют поле действия, сосредоточенное только на накопителе, в то время как передаточная пластина двигается от накопителя к лотку и наоборот. Более конкретно, рычаг переноса яиц внутри накопителя используется при каждом цикле заполнения, то есть после каждого переноса яиц пополнения передаточной пластиной, для уравнивания количества ячеек, содержащих яйца, в каждом ряду удаляя определенное количество яиц из практически хорошо укомплектованного ряда для размещения их в менее укомплектованном ряду.
Таким образом, предлагается решение для проблемы, которая может возникать, когда накопитель опустошен только в некоторых рядах, в то время как остальные остаются в значительной степени заполненными. Это в частности может происходить в случае, если даже в среднем непригодные яйца распределены равномерно по всем линиям лотка, серии лотков содержат немного или не содержат непригодных яиц в определенной линии, следуя один за другим в узел заполнения. Пока машина так сконструирована, накопитель заполняется следующим лотком, когда все ряды накопителя могут быть заполнены одновременно. Поэтому достаточно для ряда накопителя не иметь достаточного количества пустых ячеек, для того чтобы заполнение было бы невозможно, и только один ряд ячеек будет продолжать поставлять яйца, чтобы заместить позиции, оставленные пустыми в соответствующей линии лотка. В это время, другие, пустые ряды лотка делают невозможным заполнение лотков на 100%.
Рычаг локального переноса получает команды от программных средств, связанных с узлом заполнения, который автоматически определяет количество ячеек, содержащих яйца в каждом ряду накопителя, и поэтому идентификация ряда ячеек содержит преимущественно яйца (действие A21). На основании этих данных, программные средства определяют ряд ячеек, в котором рычаг перемещения должен захватить яйца и количество яиц которое необходимо захватить (действие A22). В то же время, программные средства определяют ряд ячеек, содержащий наименьшее количество яиц (действие A23). Они далее отправляют команды управления на приводящие средства, так что они распределяют (действие A24) этот ряд корректно, чтобы иметь достаточное количество пустых ячеек для размещения этих яиц. Программные средства, наконец, информируют рычаг перемещения ряда ячеек, в которых эти яйца должны размещаться (действие A25).
В качестве примера, в каждом цикле рычаг локального переноса может возвращать три яйца из наиболее заполненного ряда накопителя и размещать их в наиболее пустом ряду. Будет очевидно, что выбор трех яиц совершенно случаен, и что они могут быть различными после каждого цикла, рычаг перемещения далее устанавливается так, чтобы он мог одинаково захватывать одно или более яиц в соответствии с командами программных средств.
Изменение количества яиц в двух рядах накопителя, которое происходит от этого действия, вторым устройством перемещения, сопровождается командой от приводящих устройств для юстировки положения заполненных ячеек, если необходимо, и пустых ячеек этих двух рядов, относительно виртуальной разграничительной линии между областью переноса и областью хранения, поскольку это положение находится после каждого цикла заполнения, как было описано ранее.
Предшествующее описание четко объясняет, как изобретение делает возможным достижение его целей. В частности, оно разрешает реализацию операций стабилизации яиц, которые особенно эффективны для достижения оптимальной степени заполнения текущих последовательных лотков.
В случае первого варианта реализации изобретения, то есть в котором предусмотрена только основная передаточная пластина (пластина, которая забирает подготовленные яйца из ячеек накопителя и размещает их в перемещающемся лотке), без добавления рычага локального перемещения, специалисту в данной области техники будет доступно наилучшим образом определить, какое дополнительное количество ячеек должно быть предусмотрено. Увеличение количества ячеек в накопителе, близкое к количеству яиц в лотках, делает возможным улучшение конечной степени заполнения, но с побочным эффектом увеличения среднего времени, затрачиваемого яйцами в накопителе, и таким образом вне инкубаторов.
В альтернативном варианте реализации изобретения, не проиллюстрированного подробно на фигурах, возможно принимать меры для модификации узла стабилизации с тем, чтобы адаптировать его к обработке лотков для куриных яиц в соответствии с распределением ячейки приема яиц в смещенных рядах, чем в простом шахматном распределении в линиях и рядах в двух направлениях перпендикулярных относительно друг друга. Одно подходящее решение, чтобы сделать это состоит из оснащения устройств переноса яиц между накопителем и следующим лотком механизмом, способным преобразовывать распределение прямоугольного типа накопителя в распределение со смещенными рядами смещая ячейки на полшага, периодически каждый раз когда это требуется. Выполнение этой операции в устройстве переноса яиц делает возможным лучше соответствовать распределению в смещенных рядах в смысле структуры оборудования и безопасности работы.
Предшествующее описание демонстрирует, что изобретение не ограничивается подробно описанными вариантами реализации или конкретными вариантами реализации проиллюстрированными на фигурах. Напротив, оно расширяется до использования любых эквивалентных средств. Поэтому, существуют ситуации, в которых может быть возможным устранение присутствия ячейки приема яиц физически воплощенных путем их мобильности на предусмотренных с этой целью рельсах в накопителе. Допуская, например, что хотя пока в пищевой промышленности такие объекты, как яйца, хранятся в отдельных ячейках в лотках, более не куриные яйца, с их строгими требованиями к обращению, но фрукты, хранимые свободно бок о бок один за другим в каждом столбце лотка, то имеется возможность использования накопителя, содержащего набор индивидуально убираемых штырей, управляемых между выставленным положением и убранным положением, когда необходимо захватить объекты доступные в каждом ряду в количестве, соответствующем количеству недостающих объектов из соответствующего столбца накопителя, и толкать их, пока они не встанут в положение, чтобы быть коллективно захваченными устройством переноса и расположенными этим устройством в месте, оставленном свободным в каждом столбце за следующим лотком.
Изобретение также не ограничивается реализацией, содержащей узел стабилизации со своим накопителем и связанным с ним устройством управления в производственной цепи, содержащей узел овоскопа для яиц перед этапом обработки и/или узлом введения вакцины в последующем этапе, операции, присущие каждому из этих этапов, выполняются в продолжение этапа стабилизации, до и после этого этапа, соответственно, в той же промышленной установке, или относительно этапа стабилизации, они откладываются на более позднее время и/или реализуются на удаленных географических локациях.
Несмотря на то, что относительно лотков для яиц, когда они принимаются на операции стабилизации, яичные лотки, которые недостаточно полны наиболее часто следуют предварительной обработке выполняемой неразрушительными способами контроля состояния отдельных яиц выполняемых путем овоскопии и ведущих к удалению яиц из каждого лотка, которые были признаны непригодными автоматическим анализом информации полученной овоскопией, также несомненно, что после выхода из узла стабилизации, лотки, которые были полностью заполнены, могут предназначаться для множества последующих операций обработки, отличающихся от введения вакцины. Например, может рассматриваться введение вирусного культуры в приложениях использующих оплодотворенные яйца в качестве культурной среды для производства вакцины, или введения в яйца любого продукта обработки для защиты цыплят, которые родятся из обработанных яиц, или удаления образцов материала изнутри каждого яйца путем использования иглы пробивающей оболочку. Это сценарии, в которых промышленные требования в особенности строго регулируют состояние заполнения каждого лотка и геометрической правильности в смысле формы отдельных яиц и размещения различных яиц в их соответствующих приемных ячейках.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНИЯ ОБРАБОТКИ ЯИЦ | 1992 |
|
RU2048088C1 |
| Система идентификации лотка с яйцами и соответствующий способ | 2016 |
|
RU2685726C1 |
| СОРТИРОВОЧНАЯ МАШИНА ДЛЯ ЯИЦ | 1992 |
|
RU2038768C1 |
| Установка для укладки яиц в прокладки | 1981 |
|
SU1024376A1 |
| Способ контроля температуры воздуха в инкубаторе для яиц птиц | 2023 |
|
RU2805845C1 |
| СПОСОБ ОБРАБОТКИ ЯИЦ (ВАРИАНТЫ) | 2002 |
|
RU2264708C2 |
| ИНКУБАТОР-КОНВЕЙЕР | 2016 |
|
RU2637213C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ АВТОМАТИЧЕСКОГО УДАЛЕНИЯ ЯИЦ | 2008 |
|
RU2436295C1 |
| ОВОСКОП | 1999 |
|
RU2155959C1 |
| Инкубационный лоток | 2018 |
|
RU2681925C1 |
Группа изобретений относится к заполнению яйцами перемещаемых лотков. Способ осуществляют путем заполнения пустых ячеек каждого последовательно перемещающегося лотка имеющимися в наличии яйцами, извлеченными из перемещающегося лотка. Причем яйца, предназначенные для заполнения пустых ячеек, становятся доступными для переноса в приемные ячейки, которые закреплены с возможностью индивидуального перемещения в накопителе под управлением устройства управления, которое автоматически определяет расположение доступных ячеек, содержащих яйца, на основании конфигурации накопителя, соответствующей состоянию заполнения перемещающегося лотка, определяемому конфигурацией его незаполненных ячеек. Изобретением является также и устройство. Группа изобретений обеспечивает повышение надежности, производительности и упрощение. 2 н. и 20 з.п. ф-лы, 9 ил.
1. Способ заполнения перемещаемых лотков для яиц (8) путем заполнения пустых ячеек (22) каждого последовательно перемещающегося лотка (8) путем имеющихся в наличии яиц, извлеченных из указанного перемещающегося лотка, причем яйца, предназначенные для указанного заполнения пустых ячеек, становятся доступными для переноса в приемные ячейки (24), которые закрепляются с возможностью индивидуального перемещения в доступном накопителе для яиц (16), в котором они перемещаются под управлением устройства управления, которое автоматически определяет расположение доступных ячеек, содержащих яйца, на основании конфигурации накопителя, соответствующей состоянию заполнения перемещающегося лотка, определяемому конфигурацией его незаполненных ячеек.
2. Способ по п. 1, отличающийся тем, что загрузка имеющегося лотка (8) осуществляется путем одновременного переноса различных имеющихся в наличии подготовленных яиц из соответствующих ячеек (24) накопителя (16), приводя накопитель в указанную конфигурацию, далее перемещая все вместе в направлении указанного перемещающегося лотка, причем яйца, каждое в отдельности, далее укладываются в соответствующие ячейки лотка, при этом указанная конфигурация накопителя формируется автоматически на основании наличия яиц в ячейках накопителя и указанного состояния заполнения лотка, так что перенос яиц между ячейками, содержащими яйца из накопителя, и приемными ячейками перемещающегося лотка для яиц выполняется при соответствии между наличием пустой ячейки в лотке и наличием в накопителе ячейки, содержащей яйцо, доступной для перемещения.
3. Способ по п. 2, отличающийся тем, что при каждом цикле заполнения перемещающегося лотка ячейки приема яиц передвигаются в накопителе (16) между областями заполнения и хранения, в которых укладываются яйца, и областью возможного перемещения, в которой ячейки, содержащие яйца, размещаются на месте в соответствии с указанной конфигурацией накопителя, при этом перенос имеющихся в наличии яиц, таким образом, подготавливает следующий перенос, осуществляемый автоматически путем передаточной пластины, управляемой автоматически, чтобы одновременно захватывать все яйца, переместить все вместе в перемещающийся лоток и одновременно освободить их все для укладки в указанный лоток.
4. Способ по п. 3, отличающийся тем, что яйца в накопителе периодически пополняются путем переноса яиц, удаленных из одного из последующих лотков, предназначенных для этой цели, в пустые ячейки указанного накопителя.
5. Способ по п. 4, отличающийся тем, что при каждом цикле обработки перемещающегося лотка он чередует этап концентрирования ячеек накопителя, стремясь привести их бок о бок друг с другом по рядам ячеек, в направлении области хранения накопителя (46), и этап распределения ячеек, содержащих яйца, в направлении области перемещения в накопителе, в которой они автоматически размещаются в соответствии с указанной конфигурацией накопителя для переноса яиц, которые они содержат, в стабилизируемый лоток (8).
6. Способ по пп. 1-5, отличающийся тем, что в каждом ряду сконцентрированные ячейки размещены бок о бок в указанной области хранения ячеек, содержащих яйца (46), при этом количество ячеек для каждого ряда определено автоматически на основании указанной конфигурации накопителя, определенной автоматически, чтобы соответствовать состоянию заполнения лотка, для заполнения, помещается вперед движущейся линии для распределения в область переноса.
7. Способ по п. 6, дополнительно включающий этап локального перераспределения имеющихся в наличии яиц в указанном накопителе путем переноса яиц, расположенных в ячейках приема яиц, принадлежащих ряду ячеек, лучше укомплектованному имеющимися в наличии яйцами, для размещения, таким образом, удаленных яиц, таким образом, в пустых ячейках занимая ряд ячеек, менее укомплектованный имеющимися в наличии яйцами, причем указанные более и менее укомплектованные ряды определяются автоматически на основании пересчета яиц, по-прежнему содержащихся в них после переноса яиц, перемещенных в перемещаемые лотки за предшествующие циклы заполнения лотков.
8. Способ по п. 7, отличающийся тем, что необходимость в пополнении указанного накопителя (16) определяется автоматически путем сравнения количества имеющихся в наличии яиц в наборах последовательных ячеек в каждом из указанных рядов (R) с количеством пустых ячеек для яиц в каждой соответствующей линии ячеек в лотке, предназначенном для заполнения (С), причем в случае обнаружения такой необходимости указанное заполнение последовательных лотков прерывается для периодического пополнения накопителя (16) путем снабжения его яйцами путем перемещения всех яиц, содержащихся в одном из еще не обработанных заполнением перемещаемых лотков, в пустые ячейки указанного накопителя.
9. Способ по п. 8, отличающийся тем, что информация о конфигурации лотка, определяющая состояние заполнения каждого перемещаемого лотка путем распределения между пустыми ячейками и заполненными ячейками, достигается путем специального устройства датчика, расположенного на лотках или на их пути, на этапе заполнения.
10. Способ по п. 8, отличающийся тем, что заполнение последовательно перемещаемых лотков происходит после предшествующего этапа проверки состояния яиц и удаления из лотков для яиц, признанных негодными, и причем информация о состоянии заполнения для каждого перемещаемого лотка предоставляется автоматически на основании распределения между пустыми ячейками и заполненными ячейками, известными из предшествующего этапа.
11. Устройство для заполнения перемещаемых лотков для яиц (8), содержащее:
узел стабилизации в отношении перемещающихся яиц, взятых на других участках, выполненный с возможностью размещения в ячейках каждого из перемещающихся лотков, определенных как пустые, отличающееся тем, что оно содержит накопитель доступных яиц (16), причем каждые из принимающих яйцо ячеек (24) являются индивидуально подвижными в накопителе под воздействием автоматически управляемого приводного средства (26), определяющего распределение ячеек, содержащих имеющиеся в наличии яйца в области переноса (48) накопителя,
передаточную пластину (18), представляющую собой средство переноса яиц, удаленных из указанной области переноса (48) указанного накопителя, в лоток, проходящий стабилизацию (8), и размещение их в приемных ячейках указанного лотка,
и устройство автоматического управления указанным приводным средством ячеек для обеспечения распределения ячеек, содержащих имеющиеся в наличии яйца, в указанной области переноса в конфигурации накопителя, устанавливаемой автоматически на основании состояния заполнения перемещающегося лотка, определяющей его конфигурацию в смысле распределения ячеек без яиц, с тем чтобы каждая заполненная ячейка содержала имеющееся в наличии яйцо, соответствующее пустой ячейке в указанном лотке.
12. Устройство по п. 11, отличающееся тем, что средство перемещения (18) состоит из присасывающей пластины, содержащей отдельные захватные средства для захвата яиц, которые распределяются в столько рядов и столбцов, как и ячеек для яиц в каждом из указанных перемещающихся лотков (8).
13. Устройство по п. 12, отличающееся тем, что ячейки приема яиц в накопителе (16) сгруппированы вместе в ряды (Rn), отделенные друг от друга, и каждый из них сформирован ячейками (24) с возможностью индивидуального перемещения вдоль соответствующих рядов под воздействием указанного приводного средства (26), взаимодействующего с накопителем.
14. Устройство по п. 13, отличающееся тем, что в каждом из указанных рядов ячейки монтируются рядами последовательно на направляющей рельсе, направляющей их движение, и также тем, что в каждом ряду они располагаются параллельно и напротив друг друга на указанной рельсе так, что они толкают друг друга вдоль указанной рельсы в случае, если одной из них задано двигаться.
15. Устройство по п. 14, отличающееся тем, что каждый из указанных рядов (Rn) содержит количество подвижных ячеек (24) большее, чем количество ячеек приема яиц (22) в каждой из линий (Cn) лотков, последовательно двигающихся для заполнения (8).
16. Устройство по п. 15, отличающееся тем, что дополнительно к указанной области переноса (48), в которой в течение каждого цикла заполнения перемещающегося лотка ячейки, содержащие яйца, распределяются в конфигурации, определяемой автоматически на основании конфигурации пустых ячеек перемещающегося лотка, при этом яйца захватываются и извлекаются из указанных ячеек, таким образом распределяясь путем указанного средства перемещения, причем указанный накопитель (16) содержит область хранения (46) ячеек, содержащих яйца для ячеек, не используемых для заполнения перемещающегося лотка.
17. Устройство по п. 13, отличающееся тем, что указанное приводное средство (26) содержит гребень с выдвижными зубьями, которые подвижно закреплены вдоль указанных рядов ячеек от одного конца до другого по всем указанным рядам, причем каждый из зубьев гребня предназначен одному из указанных рядов ячеек и является индивидуально управляемым от активного положения, приводящего в движение ячейку соответствующего ряда, с которой он сцеплен, до неактивного положения, при котором он отводится от ячеек, в то время как гребень перемещается над всеми рядами ячеек.
18. Устройство по п. 17, отличающееся тем, что указанный гребень сделан в форме рычага, поддерживающего подъемные приспособления (34), каждое из которых содержит палец, создающий один из указанных выдвижных зубьев указанного гребня.
19. Устройство по п. 17, отличающееся тем, что каждая перемещаемая ячейка накопителя содержит приводной язычок (32), с которым сцепляется соответствующий зуб гребня, когда он приведен в активное положение для передвижения последовательности ячеек в том же ряду в одном направлении или в другом вдоль направляющей рельсы.
20. Устройство по п. 13, отличающееся тем, что дополнительно содержит рычаг локального перемещения для переноса яиц между различными ячейками в указанном накопителе, причем указанный рычаг локального перемещения регулируется автоматически для извлечения яиц, находящихся в ячейках ряда, автоматически определяемых как более укомплектованные яйцами, и для размещения их в пустые ячейки в ряду, автоматически определенном как менее укомплектованный яйцами.
21. Устройство по пп. 11-20, отличающееся тем, что содержит приспособление для управления указанными приводными средствами ячеек, настроенное на управление приводом указанного гребня в поступательном движении назад и вперед вдоль указанных рядов ячеек, перемещаемого над ячейками различных рядов накопителя, и управление зубьями гребня, так что каждый из них над соответствующим рядом зацепляется поочередно или с последними из ячеек для перемещения при перемещении гребня в первом направлении для распределения ячеек, содержащих яйца, в область перемещения ячеек, заполняющих перемещающийся лоток, или с первыми из ячеек, которые, таким образом, были опорожнены от их яиц в первом направлении (включая те, которые уже были пустыми), при гребне, двигающемся в противоположном направлении над областью хранения для ячеек, содержащих яйца, из которой при каждом цикле заполнения лотка ячейки, распределенные для перемещения, удаляются в количестве, которое определяется в каждом ряду автоматически на основании указанной конфигурации накопителя, которой следует придерживаться.
22. Устройство по п. 21, отличающееся тем, что содержит приспособление для автоматического определения момента для пополнения накопителя яйцами, а также приспособление для последующего управления указанными приводными средствами гребня и управления его зубьями, для того чтобы во время перемещения гребня в указанном первом направлении при его возвратно-поступательном движении распределять пустые ячейки в указанной области переноса согласно конфигурации, определенной в соответствии с конфигурацией заполненных ячеек перемещающегося лотка, который далее назначается для пополнения, а также приспособление для последующего управления устройством переноса яиц так, чтобы захватывать яйца, находящиеся в указанном лотке, и размещать их в пустых ячейках, которые были упорядочены в области переноса.
| FR 2912600 A1, 22.08.2008 | |||
| US 5898488 A, 27.04.1999 | |||
| СПОСОБ УПАКОВКИ, ХРАНЕНИЯ И ТРАНСПОРТИРОВКИ ЯИЦ, ПРИГОДНЫХ ДЛЯ ИНКУБИРОВАНИЯ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2097288C1 |

