Изобретение относится к области управления сельскохозяйственными машинами, в частности к системе мониторинга маршрутов движения сельскохозяйственных машин при выполнении полевых работ.
В последние годы вслед за постоянным ростом производительности систем сельхозмашин, таких как зерноуборочные комбайны или полевые измельчители, тракторы с различным навесным оборудованием, разбрасыватели удобрений, сеялки, опрыскиватели, сеноворошилки и т.п., все большее значение получает планирование рабочего процесса.
Для достижения этой цели и оптимального проведения рабочего процесса были разработаны так называемые системы и способы маршрутизации, с помощью которых для соответствующей системы машин определяется оптимальный маршрут при обработке определенной территории, например определенной делянки или площади.
Конкретная система машин в зависимости от ее оснащения может направляться вдоль этого маршрута либо с автоматическим управлением, то есть с помощью автоматической системы рулевого управления, либо с полуавтоматическим или просто ручным управлением при поддержке соответствующего индикаторного устройства, при этом оператор должен стараться выдерживать положение машины на виртуальной линии движения.
Обычно такие системы маршрутизации или автоматические системы рулевого управления работают со спутниковыми навигационными системами, например, с помощью приемников системы GPS (Global Positioning System - глобальная система навигации и определения местоположения).
Как правило, любой запланированный маршрут содержит не только запланированные проходы внутри подлежащей обработке площади, то есть отдельные «рабочие проходы» на поле, но также и проходы разворота для выполнения маневров поворота в областях разворота на краю поля, выполняемые для перехода от одного рабочего прохода к другому.
Эти ситуации предъявляют специфические требования к операторам сельскохозяйственных машин, когда несколько сельскохозяйственных машин выполняют работу на одном поле одновременно, двигаясь по полю по своему запланированному маршруту.
Задача системы мониторинга маршрутов движения сельскохозяйственных машин при выполнении полевых работ и состоит в отслеживании маршрутов движения сельскохозяйственных машин и предотвращения их возможных нарушений.
Известны технические решения поставленной задачи.
Первое из известных технических решений содержит блок определения местоположения для автоматического определения данных действительного местоположения системы машин, систему маршрутизации для выработки для системы машин маршрута, содержащего рабочие проходы, вдоль которых система машин проходит при обработке территории, и проходы разворота, вдоль которых система машин проходит от одного рабочего прохода к следующему подлежащему выполнению рабочему проходу, систему управления разворотом на краю поля, которая управляет системой машин таким образом, что к концу одного рабочего прохода и/или в ходе движения по следующему за ним проходу разворота и/или к началу последующего рабочего прохода системой машин автоматически выполняется последовательность технологических шагов при развороте, причем система управления разворотом на краю поля выполнена с возможностью динамичной актуализации последовательности технологических шагов при развороте и выполнения этой последовательности в зависимости от действительного местоположения системы машин и в зависимости от рабочего прохода, подлежащего последующему выполнению (1).
Недостаток данного технического решения заключается в невысоком быстродействии системы, поскольку данные для принятия решения система выдает только после окончания сбора и обработки всей входной информации.
Известно и другое техническое решение, содержащее центральный сервер, имеющий модуль связи, предназначенный для приема входных данных управления и передачи выходных данных управления, и базу данных для хранения входных данных управления, первое устройство управления первой сельскохозяйственной машины, имеющее модуль связи для беспроводной передачи входных данных управления на центральный сервер, при этом входные данные управления содержат данные об участке, обработанном первой сельскохозяйственной машиной, второе устройство управления второй сельскохозяйственной машины, имеющее модуль связи для беспроводного приема выходных данных управления от центрального сервера, при этом центральный сервер выполнен с возможностью формирования выходных данных управления, причем, по меньшей мере, часть выходных данных управления, передаваемых второму устройству управления второй сельскохозяйственной машины, содержит данные, сформированные центральным сервером с использованием, по меньшей мере, части входных данных управления, принятых от первого устройства управления первой сельскохозяйственной машины, содержащих данные об участке, обработанном первой сельскохозяйственной машиной, и сохраненных в базе данных центрального сервера, при этом центральный сервер выполнен также с возможностью приема команд, предназначенных для первого устройства управления первой сельскохозяйственной машины или второго устройства управления второй сельскохозяйственной машины, и передачи указанных команд в качестве выходных данных управления упомянутым первому устройству управления или второму устройству управления (2).
Недостаток этого технического решения также состоит в невысоком быстродействии, обусловленном большими затратами времени на решение расчетных задач.
Цель изобретения заключается в устранении указанного недостатка, т.е. в повышении быстродействия системы путем исключения затрат времени на выявление экстремальных ситуаций, связанных с нарушением маршрутов движения, требующих немедленной реакции.
Поставленная цель достигается тем, что в систему, содержащую блок приема транзакций с датчиков географического положения сельскохозяйственных машин, информационный и синхронизирующий входы которого являются информационным и синхронизирующим входами системы соответственно, при этом информационный вход системы предназначен для приема транзакций с датчиков географического положения сельскохозяйственных машин, синхронизирующий вход системы предназначен для приема синхронизирующих сигналов занесения транзакций с датчиков географического положения сельскохозяйственных машин в блок приема транзакций с датчиков географического положения сельскохозяйственных машин, блок идентификации датчиков географического положения сельскохозяйственных машин, адресный вход которого соединен с адресным выходом блока приема транзакций с датчиков географического положения сельскохозяйственных машин, синхронизирующий вход блока идентификации датчиков географического положения сельскохозяйственных машин подключен к синхронизирующему входу системы, блок выдачи адресов записей маршрутов движения сельскохозяйственных машин, информационный вход которого соединен с информационным выходом блока идентификации датчиков географического положения сельскохозяйственных машин, синхронизирующий вход подключен к первому синхронизирующему выходу блока идентификации датчиков географического положения сельскохозяйственных машин, а информационный выход блока выдачи адресов записей маршрутов движения сельскохозяйственных машин является адресным выходом системы, предназначенным для выдачи адресов записей маршрутов движения сельскохозяйственных машин на адресный вход сервера базы данных системы, при этом второй синхронизирующий выход блока идентификации датчиков географического положения сельскохозяйственных машин является синхронизирующим выходом системы, предназначенным для выдачи сигналов управления на вход первого канала прерывания сервера базы данных, блок приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, информационный вход которого является вторым информационным входом системы, предназначенным для приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, синхронизирующий вход блока приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы является вторым синхронизирующим входом системы, предназначенным для приема синхронизирующих сигналов занесения реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы в блок приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, введены первый блок идентификации координат географического положения сельскохозяйственных машин, один информационный вход которого соединен с первым информационным выходом блока приема транзакций с датчиков географического положения сельскохозяйственных машин, другой информационный вход первого блока идентификации координат географического положения сельскохозяйственных машин подключен к первому информационному выходу блока приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, а синхронизирующий вход первого компаратора соединен со вторым синхронизирующим входом системы, второй блок идентификации координат географического положения сельскохозяйственных машин, один информационный вход которого соединен со вторым информационным выходом блока приема транзакций с датчиков географического положения сельскохозяйственных машин, другой информационный вход второго блока идентификации координат географического положения сельскохозяйственных машин подключен ко второму информационному выходу блока приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, блок коммутации и выдачи данных на информационные входы сельскохозяйственных машин, адресный вход которого соединен с адресным выходом блока приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, первый и второй информационные выходы которого подключены к первому и второму информационным входам блока коммутации и выдачи данных на информационные входы сельскохозяйственных машин, один выход первого блока идентификации координат географического положения сельскохозяйственных машин соединен с первым сигнальным входом блока коммутации и выдачи данных на информационные входы сельскохозяйственных машин, другой выход первого блока идентификации координат географического положения сельскохозяйственных машин подключен к синхронизирующему входу второго блока идентификации координат географического положения сельскохозяйственных машин, один выход которого соединен со вторым сигнальным входом блока коммутации и выдачи данных на информационные входы сельскохозяйственных машин, а другой выход блока идентификации координат географического положения сельскохозяйственных машин является первым сигнальным выходом системы, при этом информационные выходы первой и второй групп выходов являются информационными выходами системы, а сигнальный выход блока коммутации и выдачи данных на информационные входы сельскохозяйственных машин является вторым сигнальным выходом системы.
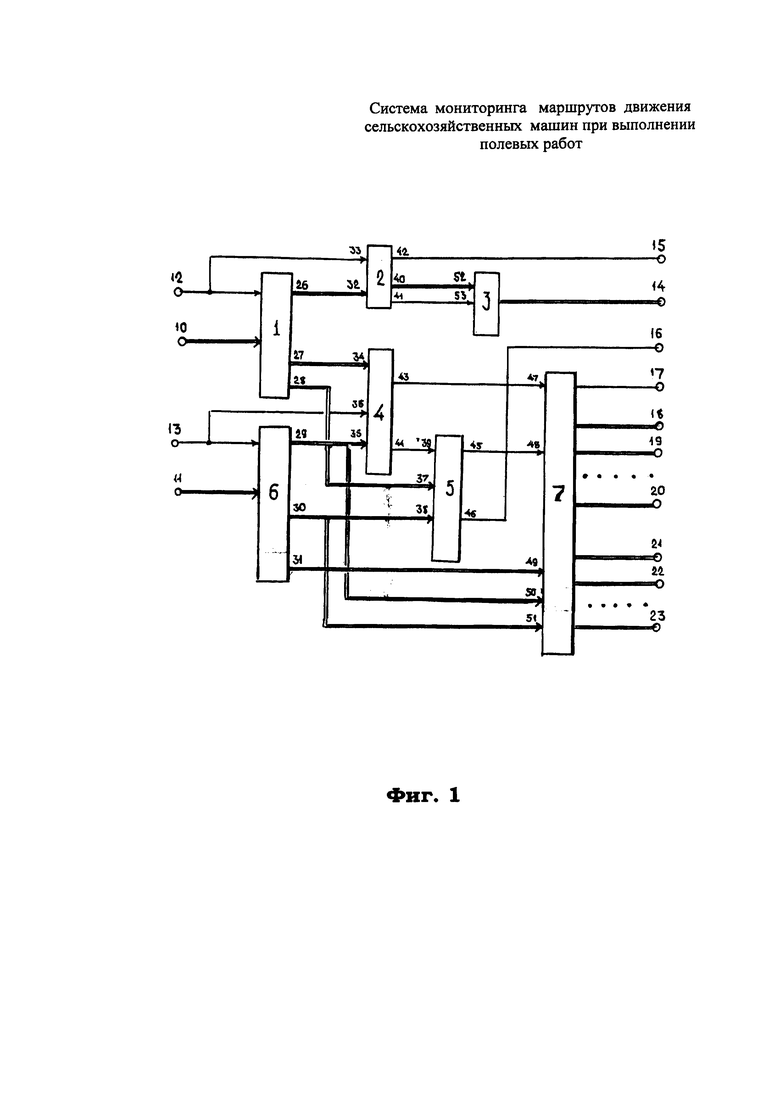
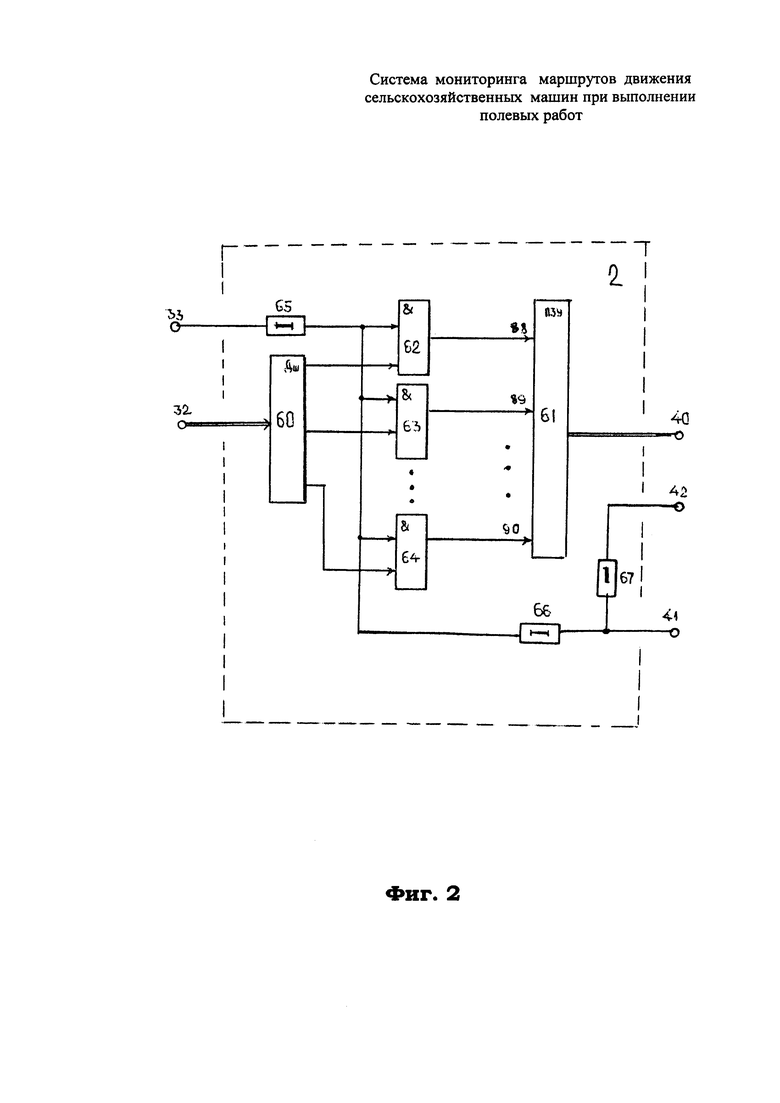
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема системы, на фиг. 2 - структурная схема блока идентификации датчиков географического положения сельскохозяйственных машин, на фиг. 3 - структурная схема первого блока идентификации координат географического положения сельскохозяйственных машин, на фиг. 4 - структурная схема блока коммутации и выдачи данных на информационные входы сельскохозяйственных машин.
Система (фиг. 1) содержит блок 1 приема транзакций с датчиков географического положения сельскохозяйственных машин, блок 2 идентификации датчиков географического положения сельскохозяйственных машин, блок 3 выдачи адресов записей маршрутов движения сельскохозяйственных машин, первый 4 и второй 5 блоки идентификации координат географического положения сельскохозяйственных машин, блок 6 приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, блок 7 коммутации и выдачи данных на информационные входы сельскохозяйственных машин.
На фиг. 1 показаны первый 10 и второй 11 информационные, первый 12 и второй 13 синхронизирующие входы системы, а также информационный 14 выход системы, синхронизирующий 15, первый 16 и второй 17 синхронизирующие выходы системы, первая 18-20 и вторая 21-23 информационные группы выходов системы.
Блок 1 (фиг. 1) приема транзакций с датчиков географического положения сельскохозяйственных машин выполнен в виде регистра, имеющего информационный 10 и синхронизирующий 12 входы, а также адресный 26, первый 27 и второй 28 информационные выходы.
Блок 2 (фиг. 2) идентификации датчиков географического положения сельскохозяйственных машин содержит дешифратор 60, постоянное запоминающее устройство 61 с входами 88, 89 и 90, элементы 62-64 И, элементы 65, 66 и 67 задержки. На чертеже показаны адресный 31, синхронизирующий 33 входы, а также информационный 40, первый 41 и второй 42 синхронизирующие выходы.
Блок 3 (фиг. 1) выдачи адресов записей маршрутов движения сельскохозяйственных машин выполнен в виде регистра, имеющего информационный 52 и синхронизирующий 53 входы, и адресный выход 14.
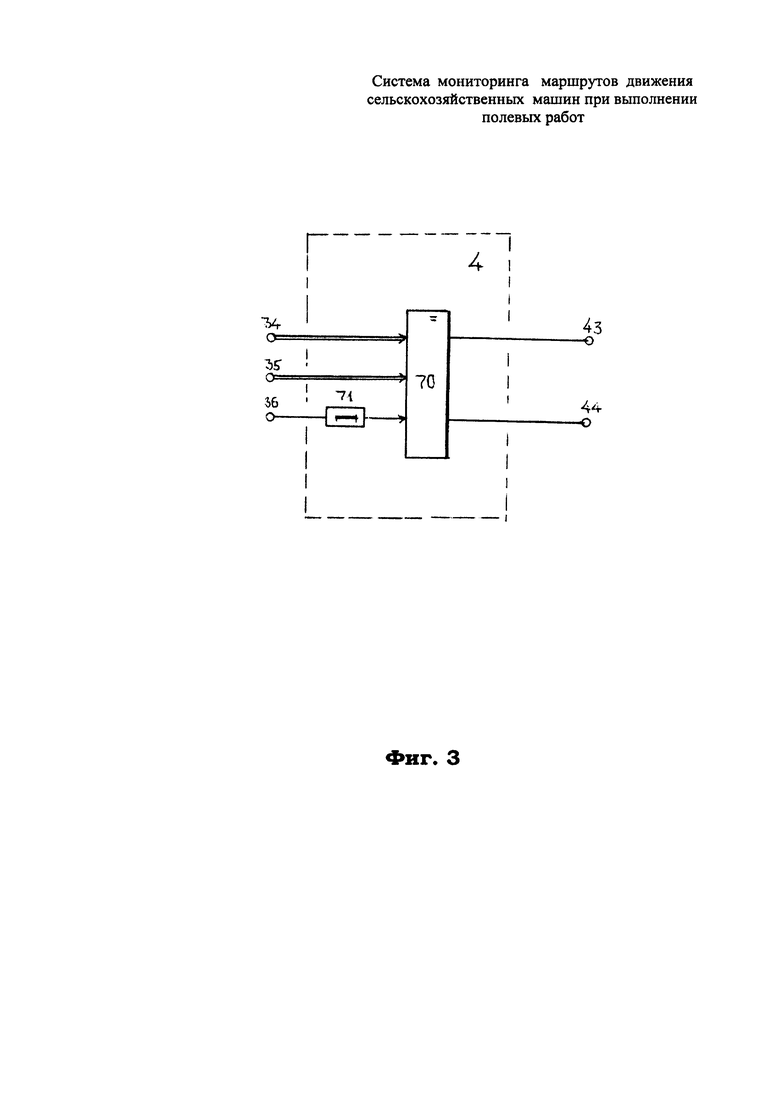
Первый блок 4 (фиг. 3) идентификации координат географического положения сельскохозяйственных машин содержит компаратор 70 и элемент 71 задержки. На чертеже также показаны первый 34 и второй 35 информационные и синхронизирующий 36 входы, а также первый 43 и второй 44 выходы.
Второй блок 5 (фиг. 2) идентификации координат географического положения сельскохозяйственных машин выполнен в виде компаратора 70, имеющего первый 37 и второй 38 информационные и синхронизирующий 39 входы, а также первый 45 и второй 46 выходы.
Блок 6 (фиг. 1) приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы выполнен в виде регистра, имеющего информационный 11 и синхронизирующий 13 входы, а также первый 29, второй 30 информационные и адресный 31 выходы.
Блок 7 (фиг. 4) коммутации и выдачи данных на информационные входы сельскохозяйственных машин содержит дешифратор 80, первую 81-83 группу элементов И, вторую 84-86 группу элементов И, элемент 87 ИЛИ. На чертеже показаны адресный 49 вход, первый 50 и второй 51 информационные входы, первый 47 и второй 48 синхронизирующие входы, а также первая 18-20 и вторая 21-23 группы информационных выходов.
Все узлы и элементы системы выполнены на стандартных потенциально-импульсных элементах.
Система работает следующим образом.
Дня определенности работу системы рассмотрим на примере использования в качестве сельскохозяйственной машин при выполнении полевых работ комбайнов, оснащенных установленными на крыше кабин так называемыми GPS-датчиками, которые генерируют сигналы датчиков о географическом положении комбайнов на основе GPS из сигналов, получаемых от спутниковой GPS-системы. Эти сигналы датчиков о положении комбайна используются известным образом для рабочего маршрута, проходимого комбайном.
Данные с датчиков, установленных на комбайнах, в виде транзакций поступают на контроллер - устройство, которое преобразует сигналы для передачи по каналу GSM через навигационный терминал. Затем транзакции посредством Internet поступают на информационный 10 вход системы мониторинга.
Структура кодограммы транзакции, поступающей на информационный 10 вход системы (фиг. 1) имеет следующий вид:
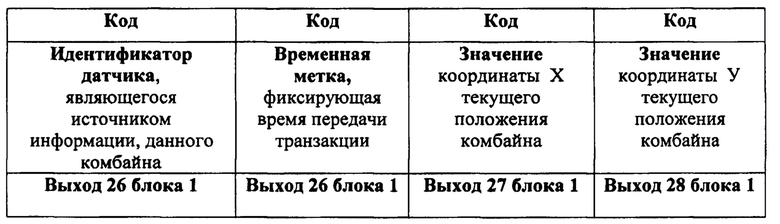
Синхронизирующим сигналом, поступающим на синхронизирующий вход 12 системы, кодограмма транзакции заносится в регистр блока 1.
Код идентификатора датчика, от которого поступила данная транзакция, с выхода 26 блока 1 поступает на информационный 32 вход блока 2 и далее на вход дешифратора 60, а синхронизирующий импульс с входа 12 через вход 33 блока 2 задерживается элементом 65 задержки на время занесения кода идентификатора датчика в регистр 1 и срабатывания дешифратора 60, и далее поступает на входы элементов 62-64 И. Дешифратор 60 расшифровывает поступивший код и подготавливает цепь прохождения сигнала с выхода элемента 65 задержки, открывая один из элементов 62-64 И. Для определенности положим, что высокий потенциал поступил на один вход элемента 63 И.
Учитывая то обстоятельство, что открытым по одному входу будет только элемент 63 И, то пройдя этот элемент И, синхроимпульс поступает, во-первых, на вход 89 считывания фиксированной ячейки памяти постоянного запоминающего устройства 61, в которой хранится код адреса записи данных маршрута движений данного комбайна с заданным идентификатором датчика положения в данный момент времени в базе данных сервера системы (не показан).
Код адреса указанной записи из ПЗУ 61 считывается через информационный 40 выход блока 2 на информационный 52 вход регистра модуля 3.
Параллельно с описанным процессом, тот же импульс считывания с выхода элемента 65 задерживается элементом задержки 66 на время считывания содержимого фиксированной ячейки ПЗУ 61 и с выхода 41 модуля 2 поступает на синхронизирующий 53 вход регистра модуля 3, фиксируя в нем код адреса ячейки памяти сервера базы данных системы.
Одновременно с этим синхронизирующий импульс с выхода элемента 66 задержки задерживается элементом 67 на время занесения кода адреса в блок 3 и затем через выход 42 модуля 2 и далее с выхода 15 системы поступает на вход первого канала прерывания сервера базы данных системы.
С поступлением этого сигнала сервер базы данных системы переходит на подпрограмму считывания содержимого ячейки памяти сервера, адрес которой сформирован на выходе 14 системы, и выдачи считанной записи на информационный вход 11 системы, откуда она поступает на информационный вход модуля 6, в который и заносится синхронизирующим импульсом сервера, поступающим на вход 13 системы.
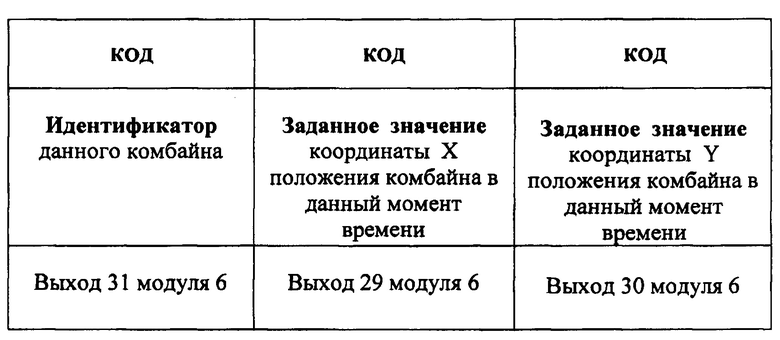
В результате на выходе регистра модуля 6 будет сформирована кодограмма, имеющая следующую структуру:
Код значения координаты X текущего положения комбайна, находящийся в блоке 1, с выхода 27 поступает на информационный вход 34 модуля 4, а код заданного значения координаты X положения комбайна, находящийся в блоке 6, с выхода 29 поступает на другой информационный вход 35 блока 4.
Параллельно с этим процессом синхронизирующий импульс с входа 13 поступает на синхронизирующий вход 36 модуля 4, где задерживается элементом 71 на время занесения кода в регистр блока 6 и далее поступает на синхронизирующий вход компаратора 70 блока 4.
По этому синхроимпульсу компаратор 70 сравнивает входные коды, и если код значения координаты X текущего положения комбайна, находящийся в блоке 1, совпадает с кодом заданного значения координаты X положения комбайна, находящимся в блоке 6, то на выходе 44 модуля 4 появляется сигнал, поступающий на синхронизирующий вход 39 компаратора блока 5.
К этому моменту времени на один информационный 37 вход компаратора блока 5 с выхода 28 блока 1 поступает код значения координаты Y текущего положения комбайна, а на другой информационный 38 вход компаратора блока 5 с выхода 30 блока 6 поступает код заданного значения координаты Y положения комбайна.
По синхронизирующему импульсу, поступающему на вход 39, компаратор блока 5 сравнивает входные коды, и если входные коды окажутся равными, то на выходе 46 компаратора блока 5 формируется сигнал, подтверждающий тот факт, что данный комбайн следует точно по запланированному маршруту. Этот сигнал через выход 16 системы выдается на табло отображения.
Если же при сравнении входных кодов компараторами блоков 4 или 5 будет зафиксировано несовпадение значений текущих координат X или Y положения комбайна с их заданными значениями в данный момент времени, то на выходе 43 компаратора блока 4 или на выходе 45 компаратора блока 5 будут формироваться сигналы несовпадения координат, которые соответственно поступают на входы 47 и 48 блока 7.
Кроме того, на адресный вход 49 блока 7 поступает код идентификатора комбайна с выхода 31 блока 6, на один информационный 50 вход блока 7 поступает код заданного значения координаты X, а на другой информационный 51 вход поступает код заданного значения координаты Y с информационных выходов 29 и 30 блока 6 соответственно.
Дешифратор 80 расшифровывает код идентификатора комбайна и выдает высокий потенциал на одном из своих выходов, например на выходе, соединенном с элементами 81 и 84 И первой и второй групп, открывая их по одному входу, к другим входам которых подключены информационные входы 50 и 51 соответственно.
С поступлением любого из сигналов несовпадения кодов на один из входов 47 или 48 блока 7, поступивший сигнал проходит элемент 87 ИЛИ, и далее через элементы 81 и 84 И выдает заданные значения координат на информационные входы системы управления соответствующего комбайна.
Кроме того, с выхода 17 системы на табло отображения поступает сигнал, подтверждающий выдачу уточняющих координат.
Таким образом, введение новых узлов и блоков позволило существенно повысить быстродействие системы путем исключения затрат времени на выявление экстремальных ситуаций, требующих немедленной реакции на уточнение маршрута движения соответствующих сельскохозяйственных машин.
Источники информации
1. Патент РФ №2424642 (19.04.2007).
2. Патент РФ №2517384 (21.12.2010) (прототип).

Система мониторинга маршрутов движения сельскохозяйственных машин при выполнении полевых работ содержит блок приема транзакций с датчиков географического положения сельскохозяйственных машин, блок идентификации датчиков географического положения сельскохозяйственных машин, блок выдачи адресов записей маршрутов движения сельскохозяйственных машин, блок приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, первый блок идентификации координат географического положения сельскохозяйственных машин, второй блок идентификации координат географического положения сельскохозяйственных машин, блок коммутации и выдачи данных на информационные входы сельскохозяйственных машин, соединенные определенным образом. Обеспечивается повышение быстродействия отслеживания маршрутов движения сельскохозяйственных машин. 4 ил.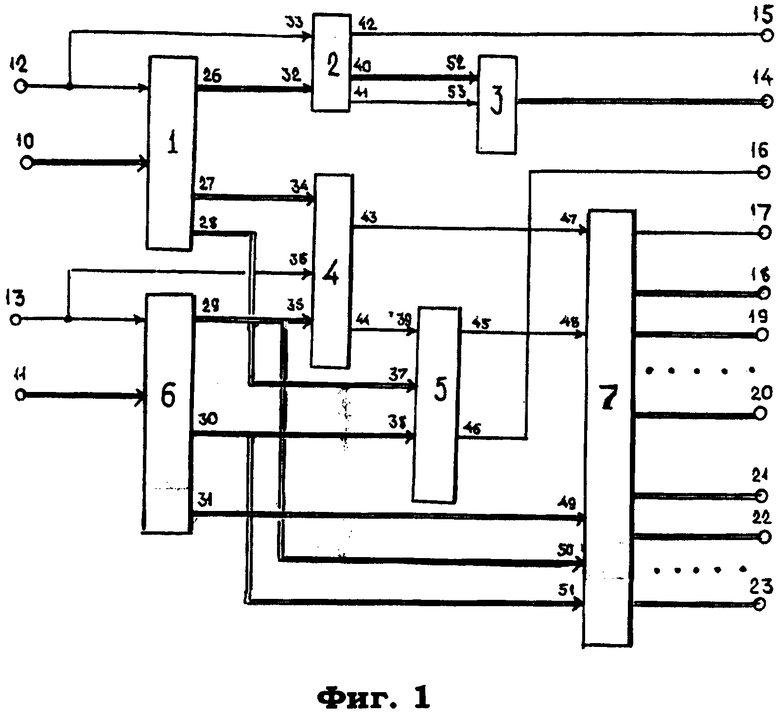
Система мониторинга маршрутов движения сельскохозяйственных машин при выполнении полевых работ, содержащая блок приема транзакций с датчиков географического положения сельскохозяйственных машин, информационный и синхронизирующий входы которого являются информационным и синхронизирующим входами системы соответственно, при этом информационный вход системы предназначен для приема транзакций с датчиков географического положения сельскохозяйственных машин, синхронизирующий вход системы предназначен для приема синхронизирующих сигналов занесения транзакций с датчиков географического положения сельскохозяйственных машин в блок приема транзакций с датчиков географического положения сельскохозяйственных машин, блок идентификации датчиков географического положения сельскохозяйственных машин, адресный вход которого соединен с адресным выходом блока приема транзакций с датчиков географического положения сельскохозяйственных машин, синхронизирующий вход блока идентификации датчиков географического положения сельскохозяйственных машин подключен к синхронизирующему входу системы, блок выдачи адресов записей маршрутов движения сельскохозяйственных машин, информационный вход которого соединен с информационным выходом блока идентификации датчиков географического положения сельскохозяйственных машин, синхронизирующий вход подключен к первому синхронизирующему выходу блока идентификации датчиков географического положения сельскохозяйственных машин, а информационный выход блока выдачи адресов записей маршрутов движения сельскохозяйственных машин является адресным выходом системы, предназначенным для выдачи адресов записей маршрутов движения сельскохозяйственных машин на адресный вход сервера базы данных системы, при этом второй синхронизирующий выход блока идентификации датчиков географического положения сельскохозяйственных машин является синхронизирующим выходом системы, предназначенным для выдачи сигналов управления на вход первого канала прерывания сервера базы данных, блок приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, информационный вход которого является вторым информационным входом системы, предназначенным для приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, синхронизирующий вход блока приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы является вторым синхронизирующим входом системы, предназначенным для приема синхронизирующих сигналов занесения реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы в блок приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, отличающаяся тем, что система содержит первый блок идентификации координат географического положения сельскохозяйственных машин, один информационный вход которого соединен с первым информационным выходом блока приема транзакций с датчиков географического положения сельскохозяйственных машин, другой информационный вход первого блока идентификации координат географического положения сельскохозяйственных машин подключен к первому информационному выходу блока приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, а синхронизирующий вход первого компаратора соединен со вторым синхронизирующим входом системы, второй блок идентификации координат географического положения сельскохозяйственных машин, один информационный вход которого соединен со вторым информационным выходом блока приема транзакций с датчиков географического положения сельскохозяйственных машин, другой информационный вход второго блока идентификации координат географического положения сельскохозяйственных машин подключен ко второму информационному выходу блока приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, блок коммутации и выдачи данных на информационные входы сельскохозяйственных машин, адресный вход которого соединен с адресным выходом блока приема данных реквизитов маршрутов движения сельскохозяйственных машин из базы данных сервера системы, первый и второй информационные выходы которого подключены к первому и второму информационным входам блока коммутации и выдачи данных на информационные входы сельскохозяйственных машин, один выход первого блока идентификации координат географического положения сельскохозяйственных машин соединен с первым сигнальным входом блока коммутации и выдачи данных на информационные входы сельскохозяйственных машин, другой выход первого блока идентификации координат географического положения сельскохозяйственных машин подключен к синхронизирующему входу второго блока идентификации координат географического положения сельскохозяйственных машин, один выход которого соединен со вторым сигнальным входом блока коммутации и выдачи данных на информационные входы сельскохозяйственных машин, а другой выход блока идентификации координат географического положения сельскохозяйственных машин является первым сигнальным выходом системы, при этом информационные выходы первой и второй групп выходов являются информационными выходами системы, а сигнальный выход блока коммутации и выдачи данных на информационные входы сельскохозяйственных машин является вторым сигнальным выходом системы.
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2005 |
|
RU2384987C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНОЙ | 2005 |
|
RU2384988C2 |
| СИСТЕМА И СПОСОБ ОБМЕНА ДАННЫМИ | 2010 |
|
RU2517384C2 |
| US 20160157275 A1, 02.06.2016 | |||
| EP 3125060 A1, 01.02.2017. | |||

