Предлагаемое изобретение относится к области дистанционного зондирования Земли (ДЗЗ).
В настоящее время совершенствуется целевая аппаратура ДЗЗ - сканер цвета открытой морской поверхности, предназначенной для использования в составе космического комплекса гидрометеорологического и океанографического обеспечения [«Практическая реализация современных метрологических требований, предъявляемых к перспективному сканеру цветности КА «Метеор-М» №3 для исследования акваторий», Акимов Н.П., Зайцев А.А., Соловьев A.M. Сборник трудов VI Всероссийской научно-технической конференции «Актуальные проблемы ракетно-космического приборостроения и информационных технологий», 2013]. Также известны сканеры цвета открытой морской поверхности - SeaWiFS, MODIS, VIIRS.
Известны следующие требования к сканерам цвета открытой морской поверхности: отношение сигнал/шум >500 при съемке акваторий; максимум спектральной энергетической яркости излучения, восходящего от водной поверхности на длине волны 410 нм при спектральной плотности энергетической яркости 95 Вт/м2 ср мкм (см. результаты моделирования при создании сканера SeaWiFS /http://oceancolor.gsfc.nasa.gov/SeaWiFS/); минимальная яркость восходящего от водной поверхности излучения ~7 Вт/м2⋅ср⋅мкм (для длины волны 860 нм). То есть сканер должен обеспечить съемку объектов малой яркости, при этом спектральная плотность энергетической яркости от верхних слоев облачной поверхности на границе плотной атмосферы может достигать значения 660 Вт/м2 ср мкм (для длины волны 460 нм). Результаты моделирования показали, что использование в конструкции сканеров одно- и многоэлементных приемников излучения в сочетании с оптико-механической разверткой, многоэлементных (линейных) приемников, а также матричных приемников для кадровой съемки не обеспечивает перечисленные выше требования при приемлемых массово-габаритных характеристиках. Таким образом, в настоящее время существует задача создания сканера, работающего во всем динамическом диапазоне яркостных сцен, обеспечивающего необходимые угол обзора и разрешение, а также отвечающего перечисленным метрологическим требованиям в части отношения сигнал/шум >500 при съемке акваторий.
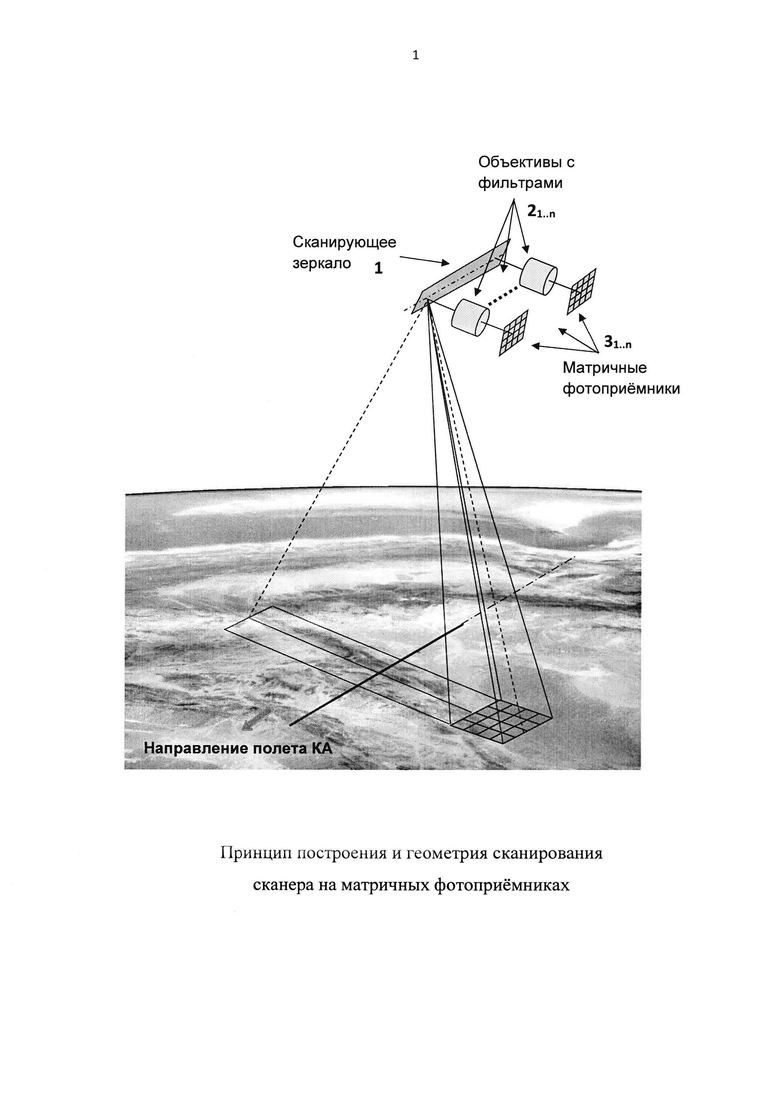
Для решения описанной выше задачи предложено сканирующее устройство для дистанционного получения изображений, формирующее совокупность информационных каналов. Сканирующее устройство включает оптически связанные между собой плоское сканирующее зеркало, совершающее возвратно-поступательное угловое перемещение, и совокупность оптико-электронных блоков. Каждый из оптико-электронных блоков содержит линзовый объектив, фильтр, матричный фотоприемник излучения и блок обработки сигналов. В отличие от аналога упомянутый фотоприемник представляет собой малоформатный (128×128 элементов) высокоскоростной матричный КМОП-фотоприемник. Обработка сигнала в бортовом блоке обработки реализована при помощи динамического интерполяционного алгоритма с итоговым формированием выходного сигнала в режиме цифровой временной задержки и накопления (ВЗН) с динамически меняющимися параметрами в масштабе реального времени. Оптико-электронные блоки работают асинхронно, обеспечивая прецизионную настройку режима цифровой задержки и накопления с целью минимизации смаза изображения в направлении сканирования за счет индивидуальной подстройки кадровой частоты матричного фотоприемника при общей тактовой частоте. Для формирования общего информационного потока со сканера в каждом блоке обработки сигналов предусмотрен буфер с асинхронной записью и синхронным чтением.
Принципиальная схема (см. рисунок) предложенного сканирующего устройства включает плоское сканирующее зеркало 1, линзовый объектив 2 с фильтром и матричный фотоприемник 3. Сканирующее зеркало 1 является односторонним и совершает вращение в одном направлении во время сканирования с последующим реверсом. Работа сканера во всем динамическом диапазоне яркостных сцен с обеспечением необходимого угла обзора и разрешения и отвечающего требованиям в части отношения сигнал/шум >500 при съемке акваторий обеспечивается при совместном использовании высокоскоростного малоформатного матричного фотоприемника 3 с оптико-механической разверткой и накоплением цифрового сигнала в соответствии с заданным алгоритмом. За счет избыточного числа фотоэлементов достигается требуемое отношение сигнал/шум для модели излучения от водной поверхности во всех каналах, но при этом существенно возрастает информационный поток. Использование же в устройстве матричных фотоприемников большой размерности (порядка 1024×1024) нецелесообразно, так как в выбранной схеме сканирования необходим фотоприемник с высокой кадровой частотой (порядка 500 кадров/сек), а кроме того, с увеличением размерности фотоприемника существенно возрастают геометрические искажения при проектировании матрицы на поверхность Земли.
Для уменьшения объема передаваемой информации (возрастающего, как было указано выше, из-за избыточности сигнала) предлагается использовать алгоритм бортовой обработки сигнала, учитывающий геометрические искажения, возникающие при съемке подстилающей поверхности. Алгоритм обеспечивает динамическое отображение геометрических соотношений, возникающих в пространстве объектов съемки при сканировании, в пространство оперативной памяти бортового устройства обработки сигналов. Отсчеты на выходе алгоритма объединения эквивалентны отсчетам от виртуального столбца, геометрически соответствующего первому столбцу матрицы; каждый набор отсчетов от виртуального столбца является суперпозицией полученных в разные моменты времени отсчетов от всех столбцов матрицы фотоприемника.
Данный алгоритм является интерполяционным и описывается сверткой

i∈(1; n), j∈(1; m), k∈(1; m*+m-1), i*∈(1; n*), j*∈(1; m*),
где i - номер строки матрицы фотоприемника;
j - номер чувствительного элемента в строке матрицы фотоприемника (номер столбца матрицы фотоприемника);
k - номер экспозиции;
i* - номер строки матрицы памяти;
j* - номер столбца матрицы памяти;
n - количество строк матрицы фотоприемника;
m - количество чувствительных элементов в строке матрицы фотоприемника (количество столбцов матрицы фотоприемника);
n* - количество строк матрицы памяти;
m* - количество столбцов матрицы памяти;
Ui,j,k - первичный сигнал, формируемый чувствительным элементом с номером (i, j) в результате k-й экспозиции;
 - выходной сигнал, записанный в ячейку памяти с номером (i*, j*);
- выходной сигнал, записанный в ячейку памяти с номером (i*, j*);
 - ядро матрицы свертки, осуществляющее преобразование первичного сигнала, получаемого с фотоприемника, в выходной сигнал;
- ядро матрицы свертки, осуществляющее преобразование первичного сигнала, получаемого с фотоприемника, в выходной сигнал;
h - высота орбиты космического аппарата (КА);
χ - угол крена КА;
τ - угол тангажа КА;
ρ - угол рысканья КА.
Матрица свертки  рассчитывается по данным конкретных параметров фотоприемной системы, орбитального движения и ориентации КА, что позволяет учесть орбитальную скорость космического аппарата, скорость сканирования и геометрические искажения, возникающие при съемке земной поверхности матричным фотоприемником. То есть предложенный алгоритм позволяет сформировать выходной сигнал в режиме цифровой временной задержки и накопления с динамически меняющимися параметрами в масштабе реального времени и сократить объем передаваемой информации в m раз без потери информативности. Алгоритм реализуется в бортовом блоке обработки сигнала.
рассчитывается по данным конкретных параметров фотоприемной системы, орбитального движения и ориентации КА, что позволяет учесть орбитальную скорость космического аппарата, скорость сканирования и геометрические искажения, возникающие при съемке земной поверхности матричным фотоприемником. То есть предложенный алгоритм позволяет сформировать выходной сигнал в режиме цифровой временной задержки и накопления с динамически меняющимися параметрами в масштабе реального времени и сократить объем передаваемой информации в m раз без потери информативности. Алгоритм реализуется в бортовом блоке обработки сигнала.
Для реализации цифровой ВЗН в представленной многоканальной системе с единым сканирующим зеркалом необходимо использовать новый принцип функционирования матричных фотоприемников из-за технологического разброса величины фокусного расстояния  для различных объективов порядка 1% от номинального значения
для различных объективов порядка 1% от номинального значения  При таком значении различия фокусных расстояний для матричного фотоприемника формата 128×128 отличие скорости бега изображения в фокальной плоскости от номинального значения приведет к рассогласованию более чем на 1 элемент за время формирования 128 экспозиций и существенному смазу изображения в направлении сканирования. Для компенсации данного эффекта предлагается реализовать асинхронную работу матричных фотоприемников в разных оптико-электронных блоках за счет добавления различного количества «пустых» тактов в тактовую диаграмму работы фотоприемника, сохраняя при этом единую тактовую частоту. Добавление различного количества «пустых» тактов позволяет регулировать кадровую частоту работы фотоприемника ϑ вблизи номинального значения ϑ0. Такая настройка компенсирует разброс значений фокусного расстояния объективов, поскольку имеет место соотношение
При таком значении различия фокусных расстояний для матричного фотоприемника формата 128×128 отличие скорости бега изображения в фокальной плоскости от номинального значения приведет к рассогласованию более чем на 1 элемент за время формирования 128 экспозиций и существенному смазу изображения в направлении сканирования. Для компенсации данного эффекта предлагается реализовать асинхронную работу матричных фотоприемников в разных оптико-электронных блоках за счет добавления различного количества «пустых» тактов в тактовую диаграмму работы фотоприемника, сохраняя при этом единую тактовую частоту. Добавление различного количества «пустых» тактов позволяет регулировать кадровую частоту работы фотоприемника ϑ вблизи номинального значения ϑ0. Такая настройка компенсирует разброс значений фокусного расстояния объективов, поскольку имеет место соотношение  Для формирования общего информационного потока со сканера в каждом блоке обработки сигналов предусмотрен буфер с асинхронной записью и синхронным чтением.
Для формирования общего информационного потока со сканера в каждом блоке обработки сигналов предусмотрен буфер с асинхронной записью и синхронным чтением.
В результате, предложенное сканирующее устройство позволяет реализовать современные метрологические требования, предъявляемые к аппаратуре ДЗЗ, предназначенной для определения цветности акваторий мирового океана; при этом интерполяционный алгоритм значительно сократит информационный поток с борта космического аппарата без потерь радиометрического разрешения и с минимальными геометрическими искажениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ радиометрической коррекции скановой структуры изображения от многоэлементного фотоприёмника многозонального сканирующего устройства | 2019 |
|
RU2702849C1 |
| СПОСОБ И УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ТЕПЛОВОГО ИЗОБРАЖЕНИЯ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1999 |
|
RU2199830C2 |
| Устройство интерполяции для отображения графической информации | 1988 |
|
SU1525717A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
| ЗВЕЗДНЫЙ ДАТЧИК С УВЕЛИЧЕННОЙ ЧАСТОТОЙ ОБНОВЛЕНИЯ ИНФОРМАЦИИ ОБ ОРИЕНТАЦИИ | 2014 |
|
RU2583349C2 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОГИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЧЕТНОСТИ | 1990 |
|
RU2025758C1 |
| ШИРОКОПОЛОСНЫЙ СПЕКТРОЗОНАЛЬНЫЙ АНАЛИЗАТОР | 1992 |
|
RU2068175C1 |
| Способ компенсации неравномерности видеосигнала матричного фотоприемника | 1982 |
|
SU1117858A1 |
| Устройство интерполяции для отображения графической информации | 1985 |
|
SU1297089A1 |
| Способ компенсации геометрического шума инфракрасных изображений | 2018 |
|
RU2688616C1 |
Сканирующее устройство для дистанционного получения изображений, формирующее N информационных каналов (от 1 до N), включает оптически связанные между собой плоское зеркало, совершающее возвратно-поступательное угловое перемещение и N оптико-электронных блоков, содержащих линзовый объектив, фильтр, матричный КМОП-фотоприемник излучения и блок обработки сигналов. Технический результат заключается в сокращение информационного потока с борта космического аппарата без потерь радиометрического разрешения и с минимальными геометрическими искажениями. 1 ил.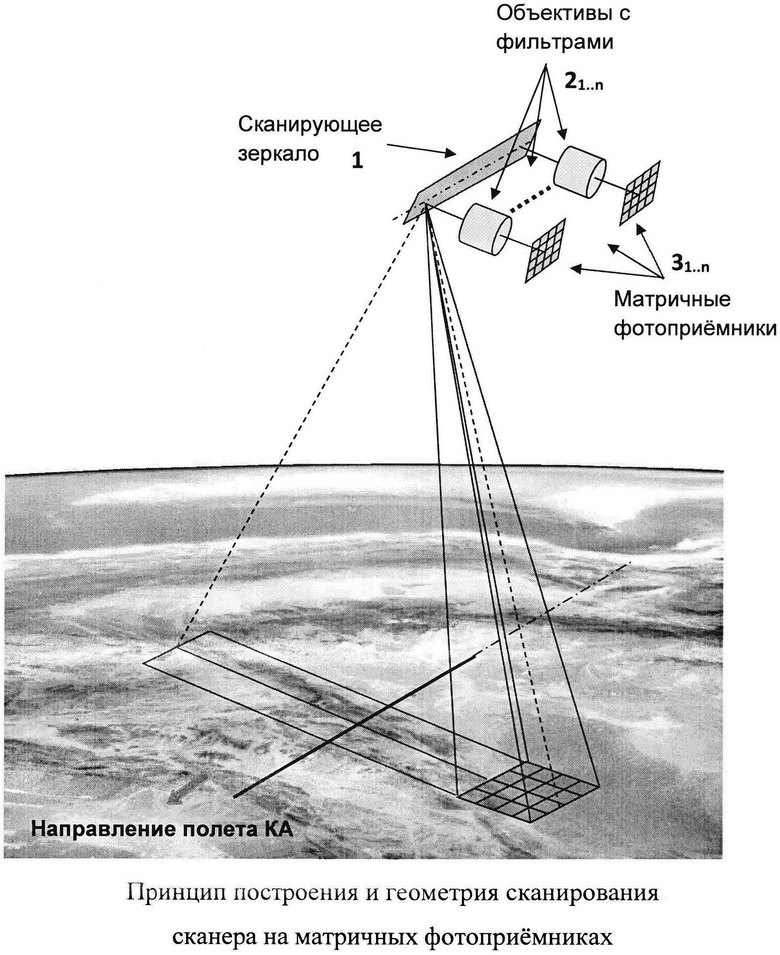
Сканирующее устройство для дистанционного получения изображений, формирующее совокупность информационных каналов и
включающее оптически связанные между собой плоское сканирующее зеркало, совершающее возвратно-поступательное угловое перемещение, и совокупность оптико-электронных блоков, каждый из которых содержит
линзовый объектив, фильтр, матричный фотоприемник излучения и блок обработки сигналов, отличающееся тем, что
упомянутый матричный фотоприемник представляет собой малоформатный высокоскоростной матричный КМОП-фотоприемник,
упомянутый блок обработки сигналов включает буфер с асинхронной записью и синхронным чтением, причем
обработка сигнала в ПЛИС указанного блока реализована при помощи динамического интерполяционного алгоритма:
U*(i*,j*)=∑kα(i,j,k)×U(i,j,k),
i∈(1; n), j∈(1; m), k∈(1; m*+m-1),
i*∈(1; n*), j*∈(1; m*), где
i - номер чувствительного элемента в строке матрицы фотоприемника;
j - номер строки матрицы фотоприемника;
k - номер экспозиции;
i* - номер столбца матрицы памяти;
j* - номер строки матрицы памяти;
n - количество чувствительных элементов в строке матрицы фотоприемника;
m - количество строк матрицы фотоприемника;
n* - количество столбцов матрицы памяти;
m* - количество строк матрицы памяти;
U(i,j,k) - первичный сигнал, формируемый чувствительным элементом с номером (i,j) в результате k-й экспозиции;
α(i,j,k) - матрица свертки, осуществляющая преобразование первичного сигнала, получаемого с фотоприемника, в выходной сигнал и рассчитывающаяся исходя из параметров фотоприемной системы и ее перемещения;
U*(i*,j*) - выходной сигнал, записанный в ячейку памяти с номером (i*,j*),
с итоговым формированием выходного сигнала в режиме цифровой временной задержки и накопления с динамически меняющимися параметрами в масштабе реального времени.
| СКАНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2498365C1 |
| Ограничитель грузоподъемности | 1961 |
|
SU144591A1 |
| US 5043924 A1 27.08.1991 | |||
| US 5155597 A1 13.10.1992. | |||

