Изобретение относится к акустическим эхолокационным системам подповерхностного зондирования и может быть использовано для обнаружения локальных неоднородностей в акустически прозрачной среде, в частности, для акустической локации подповерхностного слоя грунта, в гидроакустике, диагностической медицине, для поиска предметов на дне водоема.
Известен акустический эхолокатор [патент РФ на изобретение №2346295, М. кл. G01S 15/06, опубл. 10.02.2009, Бюл. №4], предназначенный для обнаружения объектов в океане на большой глубине. Он содержит излучающий и приемный акустоэлектрические преобразователи, генератор радиоимпульсов, генератор видеоимпульсов, блок измерения времени задержки эхо-сигнала относительно момента излучения зондирующего сигнала, блок вычисления угла прихода отраженного сигнала в вертикальной плоскости и блок определения глубины объекта.
Известное устройство имеет следующие недостатки. Оно может применяться только в море при нахождении объекта на большой глубине. Вычисления всех координат объекта оно не производит. При нахождении между объектом и эхолокатором большого количества рыбы обнаружение объекта становится недостоверным.
Известен акустический эхолокатор [патент РФ на изобретение №2433423, МКИ G01S 15/06, опубл. 10.121.2011, Бюл. №31], предназначенный для определения двух координат локальных неоднородностей в подповерхностном слое грунта. По наибольшему числу совпадающих признаков это устройство принято за прототип. Прототип содержит генератор видеоимпульсов, соединенный с генератором радиоимпульсов, приемно-излучающий акустоэлектрический преобразователь, приемный акустоэлектрический преобразователь, первый и второй приемные блоки, включающие в себя последовательно соединенные усилитель и амплитудный детектор, антенный коммутатор, осуществляющий подключение приемно-излучающего акустоэлектрического преобразователя к генератору радиоимпульсов или к первому приемному блоку, при этом приемный акустоэлектрический преобразователь подключен ко второму приемному блоку. Выход первого и второго приемных блоков подключен соответственно к первому и второму блокам определения времени задержки эхосигнала относительно излученного импульса, на которые также поступают импульсы с генератора видеоимпульсов. Выходы первого и второго блоков измерения времени задержки подключены к вычислительному блоку, осуществляющему обработку выходных сигналов блоков измерения времени задержки, а его выход подключен к блоку индикации.
К недостаткам прототипа следует отнести, во-первых, неполное определение координат объекта (только две из трех), во-вторых, низкую достоверность определения координат цели, поскольку при их вычислении могут быть использованы эхосигналы, отраженные разными объектами, которых, например, в подповерхностном слое грунта достаточно много (камни разного размера, обломки металла). Недостатком прототипа также является недостаточная точность определения координат объекта, поскольку вследствие искажения огибающей зондирующего акустического импульса при отражении от объекта сложной формы и переотражений акустической волны от мелких неоднородностей невозможно с высокой точностью определить время задержки отраженного импульса.
Техническая задача, решаемая в заявленном устройстве, состоит в повышении достоверности и точности определения места расположения неоднородности.
Поставленная техническая задача решается тем, что в устройство, содержащее генератор видеоимпульсов, соединенный с ним генератор радиоимпульсов, излучающий акустоэлектрический преобразователь, первый приемный акустоэлектрический преобразователь, соединенный с первым приемным блоком, первый блок определения интервала времени, первый вход которого подключен к выходу генератора видеоимпульсов, а второй вход - к выходу первого приемного блока, а также второй приемный блок и второй блок определения интервала времени, первый вход которого подключен к выходу второго приемного блока, а информационные выходы первого и второго блоков определения интервала времени подключены к вычислительному блоку, чей выход соединен с блоком индикации, введены второй и третий приемные акустоэлектрические преобразователи, третий приемный блок, схема совпадений, блок управления, а также третий блок определения интервала времени, при этом излучающий акустоэлектрический преобразователь подключен к выходу генератора радиоимпульсов, второй и третий приемные акустоэлектрические преобразователи подключены соответственно ко входу второго и третьего приемных блоков, первый вход третьего блока определения интервала времени соединен с выходом третьего приемного блока, второй его вход соединен с выходом первого приемного блока, а также со вторым входом первого и второго блоков определения интервала времени, а информационный выход подключен к вычислительному блоку, управляющие выходы первого, второго и третьего блоков определения интервала времени соединены с входами схемы совпадений, чей выход соединен с управляющим входом вычислительного блока, а выход блока управления соединен с управляющими входами первого, второго и третьего блоков определения интервала времени и с управляющим входом генератора видеоимпульсов.
Первый, второй и третий блоки определения интервала времени идентичны. Блок определения интервала времени содержит управляемую линию задержки, неуправляемую линию задержки, первый и второй перемножители, первый и второй интеграторы, первый и второй пиковые детекторы, компаратор и генератор линейно изменяющегося напряжения, при этом первый вход блока определения интервала времени через управляемую линию задержки соединен с первым входом первого перемножителя, второй вход блока определения интервала времени соединен со вторым входом первого и второго перемножителей, первый вход второго перемножителя через неуправляемую линию задержки соединен с выходом управляемой линии задержки, выход первого перемножителя через последовательно соединенные первый интегратор и первый пиковый детектор подключен к первому входу компаратора, а выход второго перемножителя через последовательно соединенные второй интегратор и второй пиковый детектор подключен ко второму входу компаратора, выход которого является управляющим выходом блока определения интервала времени и подключен к первому управляющему входу генератора линейно изменяющегося напряжения, чей второй управляющий вход является управляющим входом блока определения интервала времени, а выход генератора линейно изменяющегося напряжения соединен с управляющим входом управляемой линии задержки и является информационным выходом блока определения интервала времени.
При этом излучающий акустоэлектрический преобразователь и приемные акустоэлектрические преобразователи расположены на поверхности раздела сред по углам прямоугольника так, что излучающий и первый приемный акустоэлектрические преобразователи расположены на противоположных концах его диагонали.
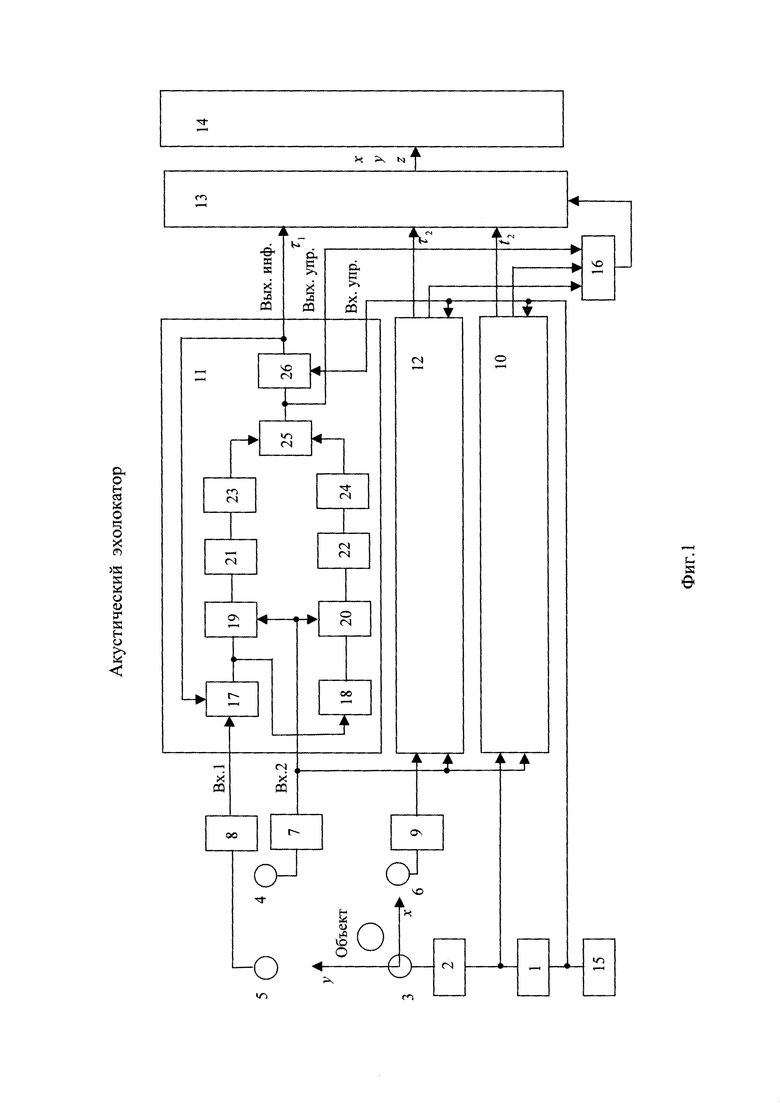
Блок-схема акустического эхолокатора изображена на фиг. 1. Устройство содержит последовательно соединенные генератор 1 видеоимпульсов, генератор 2 радиоимпульсов, излучающий акустоэлектрический преобразователь 3, идентичные первый 4, второй 5 и третий 6 приемные акустоэлектрические преобразователи, первый 7, второй 8 и третий 9 приемные блоки, а также первый 10, второй 11 и третий 12 блоки определения интервала времени, информационные выходы которых соединены с входами вычислительного блока 13, выход которого соединен с блоком 14 индикации, при этом выход первого 7 приемного блока соединен со вторым входом первого 10, второго 11 и третьего 12 блоков определения интервала времени, выход второго 8 приемного блока соединен с первым входом второго 11 блока определения интервала времени, выход третьего 9 приемного блока соединен с первым входом третьего 12 блока определения интервала времени, первый вход первого 10 блока определения интервала времени соединен с выходом генератора 1 видеоимпульсов, чей управляющий вход соединен с выходом блока 15 управления и с управляющими входами первого 10, второго 11 и третьего 12 блоков определения интервала времени, управляющие выходы которых соединены с входами схемы совпадений 16, чей выход соединен с управляющим входом вычислительного блока 13.
Блок определения интервалов времени 10, 11 и 12 содержит управляемую линию задержки 17, неуправляемую линию задержки 18, первый 19 и второй 20 перемножители, первый 21 и второй 22 интеграторы, первый 23 и второй 24 пиковые детекторы, компаратор 25 и генератор 26 линейно изменяющегося напряжения, при этом первый вход блока определения интервала времени через управляемую линию задержки 17 соединен с первым входом первого перемножителя 19, второй вход блока определения интервала времени соединен со вторым входом первого 19 и второго 20 перемножителей, первый вход второго перемножителя 20 через неуправляемую линию задержки 18 соединен с выходом управляемой линии задержки 17, выходы первого 19 и второго 20 перемножителей через последовательно соединенные соответственно первый 21 и второй 22 интеграторы и первый 23 и второй 24 пиковые детекторы подключены к первому и второму входам компаратора 25, выход которого является управляющим выходом блока определения интервала времени и подключен к первому управляющему входу генератора 26 линейно изменяющегося напряжения, чей второй управляющий вход является управляющим входом блока определения интервала времени и соединен с выходом блока управления 15, а выход генератора 26 линейно изменяющегося напряжения соединен с управляющим входом управляемой линии задержки 17 и является информационным выходом блока определения интервала времени.
Излучающий акустоэлектрический преобразователь 3 (излучатель) и приемные акустоэлектрические преобразователи 4, 5, 6 расположены на горизонтальной поверхности раздела сред (воздух и грунт) по углам прямоугольника со сторонами  и
и  где
где  - расстояние от излучателя 3 до приемного преобразователя 6,
- расстояние от излучателя 3 до приемного преобразователя 6,  - расстояние от излучателя 3 до приемного преобразователя 5. Искомый объект находится в нижней среде в точке с координатами x, y, z в ортогональной системе координат, начало которой совпадает с точкой расположения излучателя 3, ось х соответствует направлению от излучателя 3 на приемный акустоэлектрический преобразователь 6, ось у - направлению от излучателя 3 на приемный акустоэлектрический преобразователь 5, а ось z направлена вертикально вниз. Излученная преобразователем 3 акустическая волна распространяется в нижней среде и отражается от искомого объекта. Время задержки t1, t2, t3 отраженного импульса при распространении соответственно до приемных преобразователей 5, 4, 6 относительно излученного импульса определяется системой уравнений
- расстояние от излучателя 3 до приемного преобразователя 5. Искомый объект находится в нижней среде в точке с координатами x, y, z в ортогональной системе координат, начало которой совпадает с точкой расположения излучателя 3, ось х соответствует направлению от излучателя 3 на приемный акустоэлектрический преобразователь 6, ось у - направлению от излучателя 3 на приемный акустоэлектрический преобразователь 5, а ось z направлена вертикально вниз. Излученная преобразователем 3 акустическая волна распространяется в нижней среде и отражается от искомого объекта. Время задержки t1, t2, t3 отраженного импульса при распространении соответственно до приемных преобразователей 5, 4, 6 относительно излученного импульса определяется системой уравнений
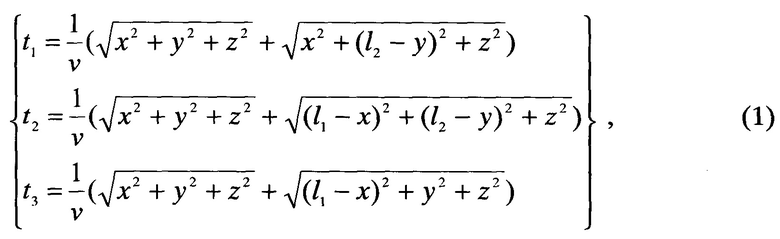
где ν - скорость распространения акустической волны. Исходя из геометрии расположения приемных акустоэлектрических преобразователей, время задержки t2 является наибольшим.
При прохождении сквозь среду и отражении от объекта огибающая акустического импульса деформируется. Это происходит потому, что в среде находятся мелкие неоднородности, вызывающие затухание, рассеяние и переотражение волны. Также сложная форма объекта является причиной деформации огибающей. В результате огибающая акустического импульса, приходящего на разные приемники, различна. Определение времени задержки вызывает трудности, так как определение момента прихода импульса становится неопределенным. В заявленном устройстве время t2 прихода на первый приемный акустоэлектрический преобразователь 4 отраженного импульса определяется по максимуму взаимно корреляционной функции огибающей излучаемого и принимаемого преобразователем 4 импульсов. Вместо непосредственного измерения времени t1, t3 измеряется разность τ1=t2-t1 и τ2=t2-t3. Для повышения точности и достоверности измерения определяется функция взаимной корреляции импульсов, полученных приемными преобразователями 4 и 5, а также 4 и 6. Временное положение максимума этой функции соответствует задержке τ1 и τ2 импульса, принятого преобразователем 4, относительно импульсов, принятых преобразователями 5 и 6. При этом в наибольшей степени учитываются особенности деформации огибающей при отражении от искомого объекта и усредняются все фоновые переотражения от мелких неоднородностей. Корреляционная обработка при определении интервалов времени дает уверенность, что импульсы на выходах приемных блоков 7, 8 и 9 принадлежат одному объекту локации, а не разным. Для правильной работы излучатель 3 должен иметь достаточно узкую диаграмму направленности, чтобы различить два разных объекта и не определить их как один. При поиске локальных неоднородностей осуществляется сканирование подповерхностного слоя путем поворота излучателя или перемещением платформы с акустоэлектрическими преобразователями 3-6.
Устройство работает следующим образом. По сигналу блока управления 15 генератор 1 начинает генерировать прямоугольные видеоимпульсы, которые модулируют генератор 2, в результате чего генератор 2 вырабатывает короткие радиоимпульсы, огибающая которых повторяет форму модулирующих видеоимпульсов. С помощью акустоэлектрического преобразователя 3 они преобразуются в акустические импульсы и излучаются во внешнюю среду. Если вблизи излучателя 3 находится объект, акустическое сопротивление которого отличается от акустического сопротивления среды, происходит отражение падающей на объект акустической волны и отраженные волны достигают приемных акустоэлектрических преобразователей 5, 4 и 6 соответственно через интервалы времени t1, t2 и t3, считая от момента излучения. Напряжение с каждого приемного акустоэлектрического преобразователя усиливается, детектируется амплитудным детектором и фильтруется в приемных блоках 7, 8 и 9. В результате на их выходах имеются видеоимпульсы, соответствующие огибающей принятых акустических импульсов. С выхода первого 7 и второго 8 приемных блоков эти импульсы поступают на входы блока 11 определения интервала времени τ1=t2-t1. С выхода первого 7 и третьего 9 приемных блоков эти импульсы поступают на входы блока 12 определения интервала времени τ2=t2-t3. На входы блока 10 определения интервала времени t2 поступают импульсы с выхода первого приемного блока 7 и с выхода генератора видеоимпульсов 1. На информационных выходах блоков 10, 11 и 12 формируются напряжения, пропорциональные соответственно интервалам времени t2, τ1 и τ2. Эти напряжения поступают на входы вычислительного блока 13. По окончании определения интервалов времени τ1, τ2 и t2 на управляющих выходах блоков 10, 11 и 12 появляется сигнал в виде перепада напряжения. Управляющие выходы блоков 10, 11 и 12 соединены со входами схемы совпадений 16. При появлении напряжения на всех входах схемы совпадения 16, на выходе последней формируется сигнал, разрешающий блоку 13 начать вычисление координат. Блок 13 осуществляет вычисление координат x, y, z, решая систему уравнений (1). При этом t1=t2-τ1, t3=t2-τ2. В качестве блока 13 можно использовать компьютер, запрограммированный на решение системы (1). Результаты вычислений координат отображаются блоком индикации 14.
Работу блока определения интервала времени рассмотрим на примере блока 11. Блок 11 определения интервала времени вырабатывает напряжение, пропорциональное разности τ1=t2-t1. На первый вход блока 11 поступает видеоимпульс с выхода второго приемного блока 8, на второй вход - напряжение с выхода первого приемного блока 7. Импульс с выхода приемного блока 8 задерживается линией задержки 17 и поступает на первый вход перемножителя 19, на второй вход которого поступает видеоимпульс с выхода приемного блока 7. После перемножения видеоимпульсов в блоке 19 и интегрирования интегратором 21 на выходе последнего формируется функция взаимной корреляции двух импульсов. Время задержки линии задержки 17 определяется величиной напряжения на ее управляющем входе. Это управляющее напряжение формируется генератором линейно изменяющегося напряжения 26, который запускается импульсом с блока управления 15. В результате время задержки каждого следующего импульса с выхода приемного блока 8 увеличивается на некоторую величину Δτ. Напряжение с выхода интегратора 21 поступает на пиковый детектор 23, который вырабатывает постоянное напряжение, равное амплитуде взаимно корреляционной функции. На первый вход второго перемножителя 20 поступает импульс с выхода управляемой линии задержки, задержанный дополнительно на время Δτ неуправляемой линией задержки 18. На второй вход перемножителя 20 поступает видеоимпульс с выхода приемного блока 7. Выходное напряжение перемножителя 20 интегрируется интегратором 22 и подается на пиковый детектор 24. Перемножитель 20 с интегратором 22 формируют функцию взаимной корреляции, которая отличается от аналогичной функции, которая формируется на выходе интегратора 21, сдвигом по времени на Δτ. Напряжения с выходов пиковых детекторов 23 и 24 подаются на входы компаратора 26. Когда напряжение на выходе пикового детектора 23 становится меньше, чем на выходе пикового детектора 24 (то есть функция взаимной корреляции идет на спад), компаратор генерирует скачок напряжения, останавливающий рост напряжения на выходе генератора линейно изменяющегося напряжения. А это напряжение является управляющим для управляемой линии задержки 17 и выходным напряжением блока 11 определения интервала времени. В результате напряжение на информационном выходе блока 11 соответствует максимуму взаимно корреляционной функции и определяет задержку акустического импульса, принятого первым приемным блоком 7, относительно акустического импульса, принятого вторым приемным блоком 8. Выход компаратора 26 является также управляющим выходом блока 11. Появление напряжения на этом выходе означает окончание формирования на информационном выходе блока 11 напряжения, пропорционального τ1. Блок 12 определения интервала времени работает аналогично и вырабатывает напряжение, пропорциональное разности τ2=t2-t3. Блок 10 определения интервала времени работает аналогично блокам 11 и 12 и вырабатывает напряжение, пропорциональное времени t2 задержки акустического импульса, принятого первым приемным блоком 7, относительно излученного акустического импульса.
При глубине зондирования 5 метров период следования зондирующих импульсов составляет около 10 мс. Время задержки в линии задержки 17 не может превышать значения периода следования импульсов, то есть может составлять единицы миллисекунд. Время задержки Δτ в линии задержки 18 зависит от требуемой точности определения интервала времени и составляет порядка 0,1 мс при точности 1%. Управляемые линии задержки могут быть реализованы в цифровом виде. Подлежащий задержке сигнал с помощью аналого-цифрового преобразователя преобразуется в цифровой код, запоминается в ячейках памяти, считывается через заданное время и цифроаналоговым преобразователем преобразуется в аналоговый вид.
Технический результат, достигаемый при применении предложенного устройства, состоит в повышении точности и достоверности определения места расположения неоднородности. Он обеспечивается применением трех каналов приема и корреляционной обработкой принятых отраженных импульсов. Это позволяет определить пространственные координаты неоднородности, уменьшить влияние на результат измерения координат формы лоцируемого объекта и наличия в среде мелких неоднородностей. Корреляционная обработка исключает возможность определения времени задержки t1, t2, t3 по импульсам, отраженным разными объектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения концентрации газа в жидкости | 1989 |
|
SU1658074A1 |
| АНАЛОГОВОЕ АКУСТОЭЛЕКТРОННОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1987 |
|
SU1440287A1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2373082C1 |
| ГЕНЕРАТОРНЫЙ ТРАКТ ПАРАМЕТРИЧЕСКОГО ГИДРОЛОКАТОРА | 2014 |
|
RU2582898C2 |
| Устройство для определения параметров газожидкостных сред | 1989 |
|
SU1709207A1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛОКАТОР | 1989 |
|
RU1641102C |
| Ультразвуковое устройство для исследования образцов материалов | 1983 |
|
SU1213410A1 |
| СПОСОБ И УСТРОЙСТВО РАДИОВОЛНОВОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 1998 |
|
RU2145441C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2388629C1 |
| Акустический измеритель расстояния | 1988 |
|
SU1532892A1 |
Изобретение относится к акустическим эхолокационным системам подповерхностного зондирования и может быть использовано для обнаружения локальных неоднородностей в акустически прозрачной среде. Решаемая техническая задача состоит в повышении достоверности и точности определения места расположения неоднородности. Устройство содержит генератор видеоимпульсов, соединенный с ним генератор радиоимпульсов, излучающий акустоэлектрический преобразователь, первый приемный акустоэлектрический преобразователь, соединенный с первым приемным блоком, первый блок определения интервала времени, первый вход которого подключен к выходу генератора видеоимпульсов, а второй вход - к выходу первого приемного блока, а также второй приемный блок и второй блок определения интервала времени, первый вход которого подключен к выходу второго приемного блока, а информационные выходы первого и второго блоков определения интервала времени подключены к вычислительному блоку, чей выход соединен с блоком индикации, введены второй и третий приемные акустоэлектрические преобразователи, третий приемный блок, схема совпадений, блок управления, а также третий блок определения интервала времени, при этом излучающий акустоэлектрический преобразователь подключен к выходу генератора радиоимпульсов, второй и третий приемные акустоэлектрические преобразователи подключены соответственно ко входу второго и третьего приемных блоков, первый вход третьего блока определения интервала времени соединен с выходом третьего приемного блока, второй его вход соединен с выходом первого приемного блока, а также со вторым входом первого и второго блоков определения интервала времени, а информационный выход подключен к вычислительному блоку, управляющие выходы первого, второго и третьего блоков определения интервала времени соединены с входами схемы совпадений, чей выход соединен с управляющим входом вычислительного блока, а выход блока управления соединен с управляющими входами первого, второго и третьего блоков определения интервала времени и с управляющим входом генератора видеоимпульсов. Достигаемый технический результат обеспечивается применением трех каналов приема и корреляционной обработкой принятых отраженных импульсов. Это позволяет определить пространственные координаты неоднородности, уменьшить влияние на результат измерения координат формы лоцируемого объекта и наличия в среде мелких неоднородностей. 2 з.п. ф-лы, 1 ил.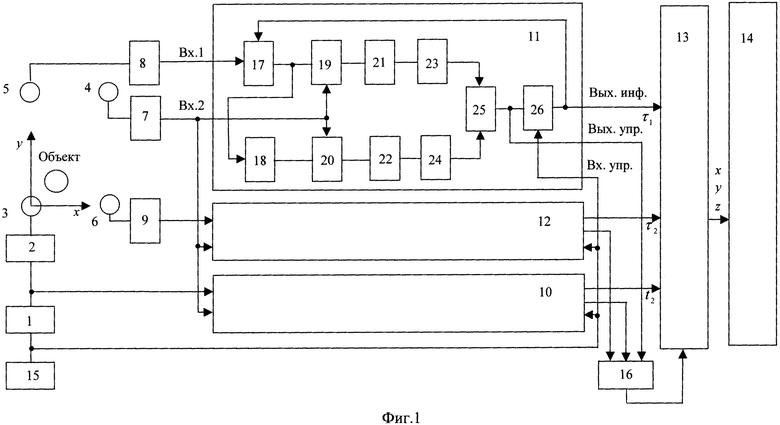
1. Акустический эхолокатор, содержащий генератор видеоимпульсов, соединенный с ним генератор радиоимпульсов, излучающий акустоэлектрический преобразователь, первый приемный акустоэлектрический преобразователь, соединенный с первым приемным блоком, первый блок определения интервала времени, первый вход которого подключен к выходу генератора видеоимпульсов, а второй вход - к выходу первого приемного блока, а также второй приемный блок и второй блок определения интервала времени, первый вход которого подключен к выходу второго приемного блока, а информационные выходы первого и второго блоков определения интервала времени подключены к вычислительному блоку, чей выход соединен с блоком индикации, отличающийся тем, что в него введены второй и третий приемные акустоэлектрические преобразователи, третий приемный блок, схема совпадений, блок управления, а также третий блок определения интервала времени, при этом излучающий акустоэлектрический преобразователь подключен к выходу генератора радиоимпульсов, второй и третий приемные акустоэлектрические преобразователи подключены соответственно ко входу второго и третьего приемных блоков, первый вход третьего блока определения интервала времени соединен с выходом третьего приемного блока, второй его вход соединен с выходом первого приемного блока, а также со вторым входом первого и второго блоков определения интервала времени, а информационный выход подключен к вычислительному блоку, управляющие выходы первого, второго и третьего блоков определения интервала времени соединены с входами схемы совпадений, чей выход соединен с управляющим входом вычислительного блока, а выход блока управления соединен с управляющими входами первого, второго и третьего блоков определения интервала времени и с управляющим входом генератора видеоимпульсов.
2. Акустический эхолокатор по п. 1, отличающийся тем, что первый, второй и третий блоки определения интервала времени содержат управляемую линию задержки, неуправляемую линию задержки, первый и второй перемножители, первый и второй интеграторы, первый и второй пиковые детекторы, компаратор и генератор линейно изменяющегося напряжения, при этом первый вход блока определения интервала времени через управляемую линию задержки соединен с первым входом первого перемножителя, второй вход блока определения интервала времени соединен со вторым входом первого и второго перемножителей, первый вход второго перемножителя через неуправляемую линию задержки соединен с выходом управляемой линии задержки, выход первого перемножителя через последовательно соединенные первый интегратор и первый пиковый детектор подключен к первому входу компаратора, а выход второго перемножителя через последовательно соединенные второй интегратор и второй пиковый детектор подключен ко второму входу компаратора, выход которого является управляющим выходом блока определения интервала времени и подключен к первому управляющему входу генератора линейно изменяющегося напряжения, чей второй управляющий вход является управляющим входом блока определения интервала времени, а выход генератора линейно изменяющегося напряжения соединен с управляющим входом управляемой линии задержки и является информационным выходом блока определения интервала времени.
3. Акустический эхолокатор по пп. 1, 2, отличающийся тем, что излучающий акустоэлектрический преобразователь и приемные акустоэлектрические преобразователи расположены на поверхности раздела сред по углам прямоугольника так, что излучающий и первый приемный акустоэлектрические преобразователи расположены на противоположных концах его диагонали.
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2010 |
|
RU2433423C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
| US 5900833 A1, 04.05.1999 | |||
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2221259C2 |

