УРОВЕНЬ ТЕХНИКИ
Двигатели могут включать в себя датчик давления в коллекторе, расположенный во впускном коллекторе двигателя для определения давления в коллекторе (MAP). Контроллер двигателя может использовать измеренное MAP для настройки работы двигателя и/или определения дополнительных рабочих параметров двигателя. Например, крутящий момент двигателя и/или заряд воздуха, засасываемый в цилиндры двигателя, могут быть по меньшей мере частично основаны на MAP. Если датчик MAP становится подвергнутым ухудшению характеристик или имеет смещение, побуждающее выходной сигнал датчика MAP быть иным, чем действующее MAP, настройки двигателя, основанные на выходном сигнале датчика MAP, могут иметь пониженную точность.
Другие попытки принять меры в ответ на ухудшение характеристик или смещение датчика MAP включают в себя сравнение выходных сигналов дополнительных датчиков давления двигателя с показаниями датчика MAP. Один из примерных подходов показан Йю и другими в US 7,171,301. В нем, множество отсчетов, полученных с датчика MAP, сравнивается с множеством отсчетов с датчика массового расхода воздуха (MAF). Смещение датчика MAP определяется на основании этого сравнения.
Однако, изобретатели в материалах настоящей заявки распознали потенциальные проблемы у таких систем. В качестве одного из примеров, в некоторых двигателях, датчик MAP может быть единственным имеющимся в распоряжении датчиком давления. Таким образом, сравнение показаний датчика MAP с датчиком MAF или любым другим датчиком давления может не быть возможным.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном из примеров, проблемы, описанные выше, могут быть препоручены способу для указания ухудшения характеристик датчика давления в коллекторе на основании смещения датчика, смещение датчика основано на давлении в коллекторе, измеренном при первом угле открытия дросселя, барометрическом давлении при втором угле открытия дросселя, опорном давлении в коллекторе при первом угле открытия дросселя и опорном барометрическом давлении, и опорном барометрическом давлении. Например, отношение барометрического давления (BP) при втором угле открытия дросселя и на текущей высоте над уровнем моря к BP на опорной высоте над уровнем моря (например, опорному BP) может быть по существу таким же, как отношение давления в коллекторе (MAP) на текущей высоте над уровнем моря и при первом угле открытия дросселя (например, текущего MAP) к значению MAP, рассчитанному на опорной высоте над уровнем моря (например, опорному MAP). Опорное BP может быть основано на предопределенном BP на опорной высоте над уровнем моря (например, BP на уровне моря). BP при втором угле открытия дросселя может быть основано на выходном сигнале датчика давления в коллекторе во время одного из работы двигателя при широко открытом дросселе или включения зажигания двигателя. Дополнительно, опорное MAP может определяться на основании одного или более из текущего (например, первого) угла открытия дросселя, опорного BP, числа оборотов двигателя, массового расхода воздуха и/или положения распределительного вала. По существу, опорное MAP может определяться при опорном BP и первом угле открытия дросселя. В одном из примеров, первый угол открытия дросселя может быть меньшим, чем второй угол открытия дросселя.
Указание ухудшения характеристик датчика MAP может включать в себя указание ухудшения характеристик, когда смещение датчика больше, чем пороговое значение смещения. Кроме того, выходной сигнал датчика MAP может корректироваться на определенное смещение датчика. Впоследствии, контроллер двигателя может настраивать работу двигателя на основании скорректированного выходного сигнала датчика MAP. Как результат, значения MAP, определенные на датчике MAP и скорректированные на смещение датчика, могут быть более точными, чем нескорректированные выходные сигналы MAP. Это может давать в результате более точное управление двигателем.
В частности, раскрыт способ для двигателя, состоящий в том, что указывают ухудшение характеристик датчика давления в коллекторе на основании смещения датчика, причем смещение датчика основано на давлении в коллекторе, измеренном при первом угле открытия дросселя, барометрическом давлении при втором угле открытия дросселя, опорном давлении в коллекторе при первом угле открытия дросселя и опорном барометрическом давлении, и опорном барометрическом давлении.
В дополнительном аспекте указание ухудшения характеристик заключается в том, что указывают ухудшение характеристик в ответ на смещение датчика, большее, чем пороговое значение смещения.
В другом дополнительном аспекте пороговое значение смещения основано на одном или более из предопределенного смещения датчика или требуемого процента точности датчика давления в коллекторе.
В еще одном дополнительном аспекте первый угол открытия дросселя меньше, чем пороговый угол открытия дросселя, а второй угол открытия дросселя больше, чем пороговый угол открытия дросселя.
В еще одном дополнительном аспекте опорное барометрическое давление является предопределенным давлением на опорной высоте над уровнем моря, причем опорная высота над уровнем моря является уровнем моря.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что определяют барометрическое давление на основании выходного сигнала датчика давления в коллекторе во время одного из работы двигателя при широко открытом дросселе или включения зажигания двигателя.
В еще одном дополнительном аспекте давление в коллекторе измеряется датчиком давления в коллекторе, в то время как двигатель выполняет сгорание, и когда первый угол открытия дросселя меньше, чем пороговый угол открытия дросселя, при этом датчик давления в коллекторе расположен во впускном коллекторе двигателя.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что многократно оценивают опорное давление в коллекторе на основании первого угла открытия дросселя, опорного барометрического давления, числа оборотов двигателя и положения распределительного вала.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что оценивают опорное давление в коллекторе на основании оценки массового расхода воздуха во время работы при первом угле открытия дросселя и коэффициента наполнения двигателя, причем коэффициент наполнения двигателя основан на числе оборотов двигателя, положении распределительного вала и оцененном массовом расходе воздуха.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что корректируют выходной сигнал датчика давления в коллекторе на смещение датчика, чтобы определять скорректированное давление в коллекторе.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что настраивают работу двигателя на основании скорректированного давления в коллекторе.
Кроме того, раскрыт способ для двигателя, состоящий в том, что: настраивают работу двигателя на основании скорректированного давления в коллекторе, причем скорректированное давление в коллекторе основано на смещении датчика давления в коллекторе, смещение основано на зависимости между давлением в коллекторе при первом угле открытия дросселя, опорным давлением в коллекторе, опорным барометрическим давлением и барометрическим давлением при втором угле открытия дросселя; и указывают ухудшение характеристик датчика давления в коллекторе в ответ на смещение, большее, чем пороговое значение смещения.
В дополнительном аспекте первый угол открытия дросселя меньше, чем второй угол открытия дросселя.
В другом дополнительном аспекте первый угол открытия дросселя меньше, чем пороговый угол открытия дросселя, а второй угол открытия дросселя является углом при широко открытом дросселе.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что оценивают опорное давление в коллекторе на основании первого угла открытия дросселя, опорного барометрического давления, числа оборотов двигателя и положения распределительного вала.
В еще одном дополнительном аспекте опорное барометрическое давление является предопределенным барометрическим давлением на уровне моря.
В еще одном дополнительном аспекте давление в коллекторе измеряется датчиком давления в коллекторе, и при этом барометрическое давление оценивается на основании выходного сигнала датчика давления в коллекторе при одном из широко открытого дросселя или включения зажигания двигателя.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что оценивают барометрическое давление во время углов открытия дросселя, меньших, чем пороговое значение, на основании давления в коллекторе, опорного давления в коллекторе и опорного барометрического давления.
Также раскрыта система, содержащая: впускной коллектор; дроссель, расположенный во впускном коллекторе; датчик давления в коллекторе, расположенный во впускном коллекторе и выполненный с возможностью определять измеренное давление в коллекторе; и контроллер с машинно-читаемыми командами для коррекции измеренного давления в коллекторе на смещение датчика давления в коллекторе, причем смещение датчика давления в коллекторе основано на измеренном давлении в коллекторе при первом угле открытия дросселя, меньшем, чем пороговое значение, оцененном барометрическом давлении при втором угле открытия дросселя, большем, чем первый угол открытия дросселя, опорном барометрическом давлении и опорном давлении в коллекторе при первом угле открытия дросселя и опорном барометрическом давлении.
В дополнительном аспекте машинно-читаемые команды дополнительно включают в себя команды для указания ухудшения характеристик датчика давления в коллекторе, когда смещение датчика давления в коллекторе больше, чем пороговое значение смещения.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен реализациями, которые кладут конец каким-нибудь недостаткам, отмеченным выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - принципиальная схема примерной системы двигателя, включающей в себя датчик давления в коллекторе.
Фиг. 2 - график, показывающий зависимость между давлением в коллекторе и барометрическим давлением при разных углах открытия дросселя.
Фиг. 3 - блок-схема последовательности операций способа для оценивания барометрического давления на основании угла открытия дросселя.
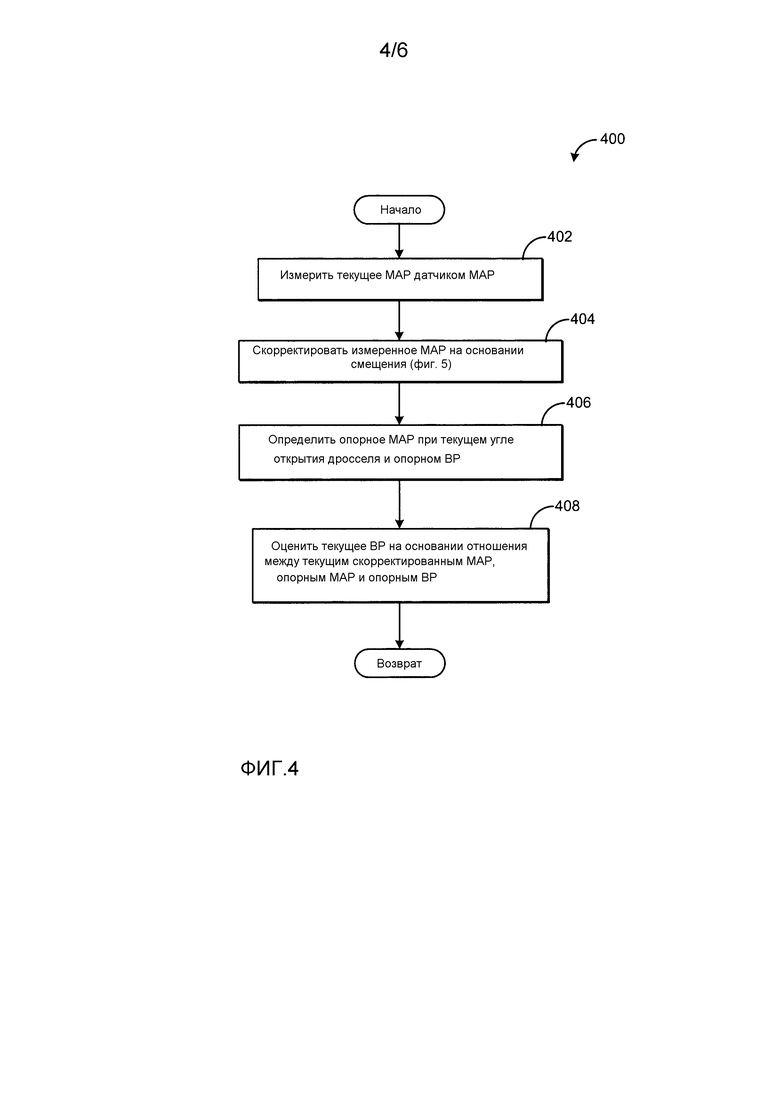
Фиг. 4 - блок-схема последовательности операций способа для оценивания барометрического давления при меньших углах открытия дросселя.
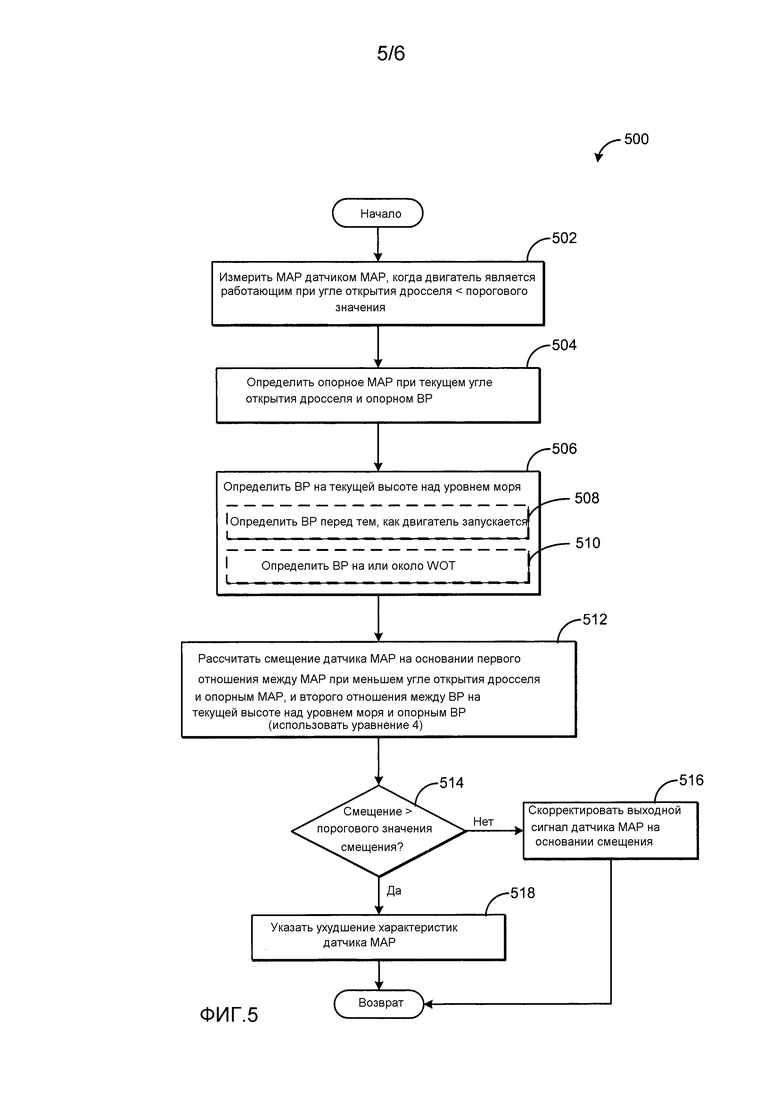
Фиг. 5 - блок-схема последовательности операций способа для определения смещения датчика давления в коллекторе.
Фиг. 6 - график примерных настроек для эксплуатации двигателя на основании оцененного барометрического давления.
ПОДРОБНОЕ ОПИСАНИЕ
Последующее описание относится к системам и способам для оценивания барометрического давления на основании опорного барометрического давления и давлений в коллекторе на двух разных высотах над уровнем моря. В некоторых примерах, система двигателя, такая как система двигателя, показанная на фиг. 1, может не включать в себя датчик барометрического давления (BP). Однако, работа двигателя может быть основана на текущем BP. В одном из примеров, когда двигатель не включает в себя датчик BP, BP может оцениваться на основании значений MAP, измеренных по датчику MAP, расположенному во впускном коллекторе двигателя. Однако, при меньших углах открытия дросселя (например, угле открытия дросселя у впускного дросселя, меньшем, чем пороговое значение), основывание BP только на выходном сигнале датчика MAP и падении давления на впускном дросселе может давать в результате оценки BP пониженной точности. Таким образом, когда двигатель является работающим при углах открытия дросселя, меньших, чем пороговое значение, BP, взамен, может быть основано на значениях MAP в двух разных рабочих состояниях двигателя. Фиг. 3 показывает способ для определения BP на основании угла открытия дросселя. Точнее, для любых заданных угла открытия дросселя, числа оборотов двигателя и положения распределительного вала, отношение между показаниями датчика MAP на двух разных высотах над уровнем моря (или BP) может быть одинаковым. Зависимость между показаниями датчика MAP на двух разных высотах над уровнем моря показана на фиг. 2. Кроме того, отношение между показаниями датчика MAP на двух разных высотах над уровнем моря может быть по существу таким же, как отношение между BP на двух разных высотах над уровнем моря. Эти отношения могут использоваться в способе, показанном на фиг. 4, для оценивания BP при меньших углах открытия дросселя. Таким образом, BP может оцениваться при любом угле открытия дросселя с использованием одного из способов, описанных выше, выбранный способ основан на угле открытия впускного дросселя относительно порогового угла открытия дросселя. Фиг. 6 показывает примерные настройки для работы двигателя на основании оцененного BP.
В некоторых примерах, датчик MAP двигателя может иметь смещение, побуждающее измеренное MAP отличаться от действующего MAP. Кроме того, датчик MAP может становиться подвергнутым ухудшению характеристик, что подтверждается повышением смещения выше порогового значения смещения. Однако, система двигателя может не включать в себя датчик массового расхода воздуха (MAF) или другой датчик давления для сравнения измерений давления с показаниями датчика MAP и последующего диагностирования датчика MAP. Как результат, управление двигателем на основании показаний датчика MAP может иметь пониженную точность. В одном из примеров, смещение датчика MAP может определяться с использованием отношений между BP и MAP на двух разных высотах над уровнем моря, как описано выше. Фиг. 5 показывает способ для определения смещения датчика MAP, а затем, коррекции выходного сигнала датчика MAP на основании определенного смещения. Кроме того, контроллер двигателя может указывать ухудшение характеристик датчика MAP, если смещение возрастает выше порогового значения смещения. Таким образом, коррекция выходного сигнала датчика MAP на смещение датчика MAP может давать в результате более точные оценки BP, оценки MAP и управление двигателем.
Фиг. 1 - принципиальная схема, показывающая примерный двигатель 10, который может быть включен в силовую установку автомобиля. Двигатель 10 показан с четырьмя цилиндрами иди камерами 30 сгорания. Однако, другие количества цилиндров могут использоваться в соответствии с данным раскрытием. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. Каждая камера 30 сгорания (например, цилиндр) двигателя 10 может включать в себя стенки камеры сгорания с поршнем (не показан), расположенными в них. Поршни могут быть присоединены к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему 150 трансмиссии. Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10. Коленчатый вал 40 также может использоваться для привода генератора переменного тока (не показанного на фиг. 1).
Крутящий момент на выходе двигателя может передаваться на гидротрансформатор (не показан), чтобы приводить в движение систему 150 автоматической трансмиссии. Кроме того, одна или более муфт могут приводиться в зацепление, в том числе, муфта 154 переднего хода, для приведения в движение автомобиля. В одном из примеров, гидротрансформатор может указываться ссылкой как компонент системы 150 трансмиссии. Кроме того, система 150 трансмиссии может включать в себя множество передаточных муфт 152, которые могут приводиться в зацепление по необходимости, чтобы активировать множество постоянных передаточных отношений трансмиссии. Более точно, посредством настойки включения множества передаточных муфт 152, трансмиссия может переключаться между верхней передачей (то есть, передачей с боле низким передаточным отношением) и нижней передачей (то есть, передачей с более высоким передаточным отношением). По существу, разность передаточных отношений вводит в действие более низкое умножение крутящего момента на трансмиссии, когда на верхней передаче, наряду с предоставлением возможности более высокого умножения крутящего момента на трансмиссии, когда на нижней передаче. Транспортное средство может обладать четырьмя имеющимися в распоряжении передачами, где передача трансмиссии четыре (четвертая передача трансмиссии) является высшей имеющейся в распоряжении передачей, а передача трансмиссии один (первая передача трансмиссии) является низшей имеющейся в распоряжении передачей. В других вариантах осуществления, транспортное средство может иметь больше или меньше, чем четыре имеющихся в распоряжении передач. Как конкретизировано в материалах настоящей заявки, контроллер может менять передачу трансмиссии (например, переключать с повышением или переключать с понижением передачу трансмиссии), чтобы настраивать величину крутящего момента, передаваемого через трансмиссию и гидротрансформатор на колеса 156 транспортного средства (то есть, крутящий момент на выходном валу двигателя). В то время как трансмиссия переключается на более низкую передачу, число оборотов двигателя (Ne или RPM) возрастает, увеличивая поток воздуха двигателя. Разрежение во впускном коллекторе, сформированное вращающимся двигателем, может увеличиваться при более высоком RPM.
Камеры 30 сгорания могут принимать всасываемый воздух из впускного коллектора 44 и могут выпускать отработавшие газы через выпускной коллектор 56 в выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 46 могут избирательно сообщаться с камерой 30 сгорания через соответственные впускные клапаны и выпускные клапаны (не показаны). В некоторых вариантах осуществления, камера 30 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
Топливные форсунки 50 показаны присоединенными непосредственно к камере 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала FPW, принятого из контроллера 12. Таким образом, топливная форсунка 50 обеспечивает то, что известно в качестве непосредственного впрыска топлива в камеру 30 сгорания; однако, будет принято во внимание, что оконный впрыск также возможен. Топливо может подаваться в топливную форсунку 50 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива.
В процессе, указываемом ссылкой как воспламенение, впрыснутое топливо воспламеняется известным средством воспламенения, таким как свеча 52 зажигания, приводя к сгоранию. Установка момента искрового зажигания может управляться, из условия чтобы искра возникала до (с опережением) или после (с запаздыванием) предписанного производителем момента времени. Например, установка момента зажигания может подвергаться запаздыванию от установки момента максимального тормозного момента (MBT) для борьбы с детонацией в двигателе или подвергаться опережению в условиях высокой влажности. В частности, MBT может подвергаться опережению, чтобы учитывать низкую скорость горения. В одном из примеров, искровое зажигание может подвергаться запаздыванию во время нажатия педали акселератора. В альтернативном варианте осуществления, воспламенение от сжатия может использоваться для зажигания впрыснутого топлива.
Впускной канал 44 может принимать всасываемый воздух из впускного канала 42. Впускной канал 42 и/или впускной коллектор 44 включает в себя дроссель 21, имеющий дроссельную заслонку 22, чтобы регулировать поток во впускной коллектор 44. В этом конкретном примере, положение (TP) дроссельной заслонки 22 может меняться контроллером 12, чтобы давать возможность электронного управления дросселем (ETC). Таким образом, дроссель 21 может приводиться в действие для изменения всасываемого воздуха, выдаваемого в камеры 30 сгорания. Например, контроллер 12 может настраивать дроссельную заслонку 22 для увеличения открывания дросселя 21. Увеличение открывания дросселя 21 может увеличивать количество воздуха, подаваемого во впускной коллектор 44. В альтернативном примере, открывание дросселя 21 может уменьшаться или полностью закрываться, чтобы перекрывать поток воздуха во впускной коллектор 44. В некоторых вариантах осуществления, дополнительные дроссели могут присутствовать во впускном канале 42. Дополнительно, положение дросселя или угол открытия дросселя могут определяться датчиком 23 положения дросселя, расположенным в дросселе 21. В одном из примеров, датчик 23 положения дросселя может измерять угол дроссельной заслонки 22 относительно направления потока воздуха через впускной канал 42. Например, когда дроссельная заслонка 22 полностью закрыта (и блокируя потока воздуха через впускной канал 42), угол открытия дросселя может приблизительно иметь значение ноль градусов. Когда дроссельная заслонка 22 полностью открыта (и перпендикулярна потоку воздуха), угол открытия дросселя может иметь значение приблизительно 90 градусов. Как дополнительно обсуждено ниже, угол открытия дросселя может оказывать влияние на падение давления на дросселе и на системе впуска. Таким образом, угол открытия дросселя также может оказывать влияние на оценку барометрического давления (BP).
Кроме того, в раскрытых вариантах осуществления, система рециркуляции отработавших газов (EGR) может направлять требуемую часть отработавших газов из выпускного канала 48 во впускной канал 42 через канал EGR, такой как канал 140 EGR. Величина EGR, выдаваемая во впускной канал 42, может меняться контроллером 12 посредством клапана EGR, такого как клапан 142 EGR. В некоторых условиях, система EGR может использоваться для регулирования температуры смеси воздуха и топлива в пределах камеры сгорания. Когда работоспособна, система EGR может вызывать формирование конденсата, особенно когда воздух охлаждается охладителем наддувочного воздуха, как подробнее описано ниже. Например, канал 140 EGR может включать в себя охладитель 143 EGR высокого давления.
Двигатель 10 может быть безнаддувным двигателем без трубонагнетателя или без нагнетателя. По существу, способы, дополнительно описанные ниже со ссылкой на фиг. 2-6, могут выполняться в условиях без наддува. В альтернативных вариантах осуществления, двигатель 10 может включать в себя турбонагнетатель, включающий в себя компрессор с приводом от турбины.
Двигатель 10 дополнительно может включать в себя один или более датчиков кислорода, расположенных во впускном канале 42 и/или впускном коллекторе 44. Впускной коллектор 44 включает в себя датчик 122 MAP для измерения абсолютного давления в коллекторе (MAP). Как дополнительно обсуждено ниже, выходной сигнал датчика 122 MAP может использоваться для оценки других давлений в системе двигателя, таких как BP. Дополнительно, необязательный датчик 120 массового расхода воздуха (MAF) может быть расположен во впускном канале 42 выше по потоку от дросселя 21. В других вариантах осуществления, впускной канал 42 может не включать в себя датчик 120 MAF, и массовый расход воздуха может оцениваться с использованием альтернативных способов, как дополнительно обсуждено ниже. В некоторых вариантах осуществления, датчик 122 MAP может быть единственным датчиком давления во впуске двигателя (например, во впускном канале 42 и впускном коллекторе 44). Дополнительно, в этом варианте осуществления, впуск двигателя может не включать в себя датчик 120 MAF.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, дежурную память 110 и шину данных. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10 для выполнения различных функций для эксплуатации двигателя 10. В дополнение к таким сигналам, обсужденным ранее, эти сигналы могут включать в себя измерение засасываемого массового расхода воздуха с датчика 120 MAF (если датчик 120 MAF включен в двигатель 10); температуру охлаждающей жидкости двигателя (ECT) с датчика 112 температуры, схематически показанного в одном месте в пределах двигателя 10; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика 23 положения дросселя; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122, как обсужденный выше. Сигнал числа оборотов двигателя, RPM, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе 44. Отметим, что могут использоваться различные комбинации вышеприведенных датчиков, такие как датчик MAF без датчика MAP, или наоборот. Во время стехиометрической работы, датчик MAP может давать показание крутящего момента двигателя. Кроме того, этот датчик, наряду с выявленным числом оборотов двигателя, может давать оценку заряда (включающего в себя воздух), введенного в цилиндр. В одном из примеров, датчик 118 на эффекте Холла, который также используется в качестве датчика числа оборотов двигателя, может вырабатывать предопределенное количество равноразнесенных импульсов каждый оборот коленчатого вала 40.
Другие, не изображенные датчики также могут присутствовать, такие как датчик для определения температуры и/или влажности окружающей среды, и другие датчики. В некоторых примерах, микросхема 106 постоянного запоминающего устройства запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими команды, исполняемые микропроцессорным блоком 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены. Примерные процедуры описаны в материалах настоящей заявки на фиг. 3-5.
Система по фиг. 1 предусматривает систему двигателя, включающую в себя впускной коллектор, дроссель, расположенный во впускном коллекторе, датчик давления в коллекторе, расположенный во впускном коллекторе и выполненный с возможностью определять измеренное давление в коллекторе, и контроллер. В одном из примеров, контроллер может включать в себя машинно-читаемые команды для настройки работы двигателя в ответ на барометрическое давление, барометрическое давление основано на измеренном давлении в коллекторе, а, во время работы двигателя при угле открытия дросселя, меньшем, чем пороговое значение, барометрическое давление дополнительно основано на опорном барометрическом давлении и опорном давлении в коллекторе при угле открытия дросселя и опорном барометрическом давлении. опорное давление в коллекторе может быть основано на многократном расчете давления в коллекторе и массовом расходе воздуха при опорном барометрическом давлении и угле открытия дросселя, и при этом, опорное барометрическое давление является предопределенным барометрическим давлением, хранимым в памяти контроллера.
В еще одном примере, контроллер может включать в себя машинно-читаемые команды для коррекции измеренного давления в коллекторе на смещение датчика давления в коллекторе, смещение датчика давления в коллекторе основано на измеренном давлении в коллекторе при первом угле открытия дросселя, меньшем, чем пороговое значение, оцененном барометрическом давлении при втором угле открытия дросселя, большем, чем первый угол открытия дросселя, опорном барометрическом давлении и опорном давлении в коллекторе при первом угле открытия дросселя и опорном барометрическом давлении. Машинно-читаемые команды дополнительно могут включать в себя команды для указания ухудшения характеристик датчика давления в коллекторе, когда смещение датчика давления в коллекторе больше, чем пороговое значение смещения.
Как представлено выше, измерение барометрического давления (BP) может использоваться контроллером двигателя (например, контроллером 12, показанным на фиг. 1) для различных процедур диагностики и управления двигателем. В одном из примеров, контроллер может использовать измерение или оценку BP для расчета заряда воздуха. В еще одном примере, контроллер может настраивать рабочие параметры двигателя, такие как требуемое топливо-воздушное соотношение, установка момента зажигания и/или требуемый уровень EGR (например, интенсивность потока EGR), на основании BP.
Однако, некоторые системы двигателя (такие как система, показанная на фиг. 1) могут не включать в себя датчик барометрического давления (BP) для определения BP. В этих системах двигателя, BP может оцениваться на основании измерений с альтернативных датчиков двигателя и/или условий эксплуатации двигателя. В одном из примеров, BP может оцениваться на основании MAP, измеренного по датчику MAP во впускном коллекторе двигателя. Более точно, BP может логически выводиться (например, оцениваться) в качестве показания датчика MAP плюс небольшое падение давления на дросселе. Однако, этот способ оценки BP может требовать, чтобы дроссель был открыт в достаточной мере, из условия чтобы падение давления на дросселе было достаточно малым, чтобы моделироваться функцией угла открытия дросселя и потока воздуха (например, массового расхода воздуха). В одном из примеров, оценивание BP таким образом может быть точным только при широко открытом дросселе (WOT), или когда угол открытия дросселя (или величина открывания дросселя) больше, чем пороговое значение. Пороговое значение может быть пороговым углом открытия дросселя, ниже которого падение давления на дросселе возрастает до уровня, приводящего к пониженной точности оценки BP и являющегося результатом управления двигателем.
Таким образом, во время работы двигателя, когда положение дросселя находится ниже порогового угла открытия дросселя, BP может не оцениваться. Взамен, предыдущая (или самая последняя) оценка BP может использоваться для настроек исполнительных механизмов и/или рабочих параметров двигателя. В одном из примеров, когда двигатель является снижающимся с более высокой высоты над уровнем моря, угол открытия дросселя может быть ниже порогового значения, а BP может быть меняющимся. Однако, поскольку BP может не оцениваться во время этого состояния, расчеты и настройки исполнительных механизмов двигателя на основании BP могут снижаться по точности.
Взамен, BP может оцениваться на основании значений MAP в двух разных рабочих состояниях двигателя. Для любых заданных угла открытия дросселя, числа оборотов двигателя и положения распределительного вала, отношение между показаниями датчика MAP на двух разных высотах над уровнем моря (или BP) может быть одинаковым. Более точно, двигатель, работающий при фиксированных числе оборотов двигателя и положении распределительного вала на уровне моря и тех же самых фиксированных числе оборотов двигателя и положении распределительного вала на более высокой высоте над уровнем моря, может иметь постоянное отношение между показаниями датчика MAP, когда двигатель, в то же время, переводится с низкого угла открытия дросселя на WOT. Кроме того, как представлено выше, выходной сигнал датчика MAP может отражать BP при любом числе оборотов двигателя и положении распределительного вала, когда дроссель находится близко к (пределах порогового значения) или на WOT.
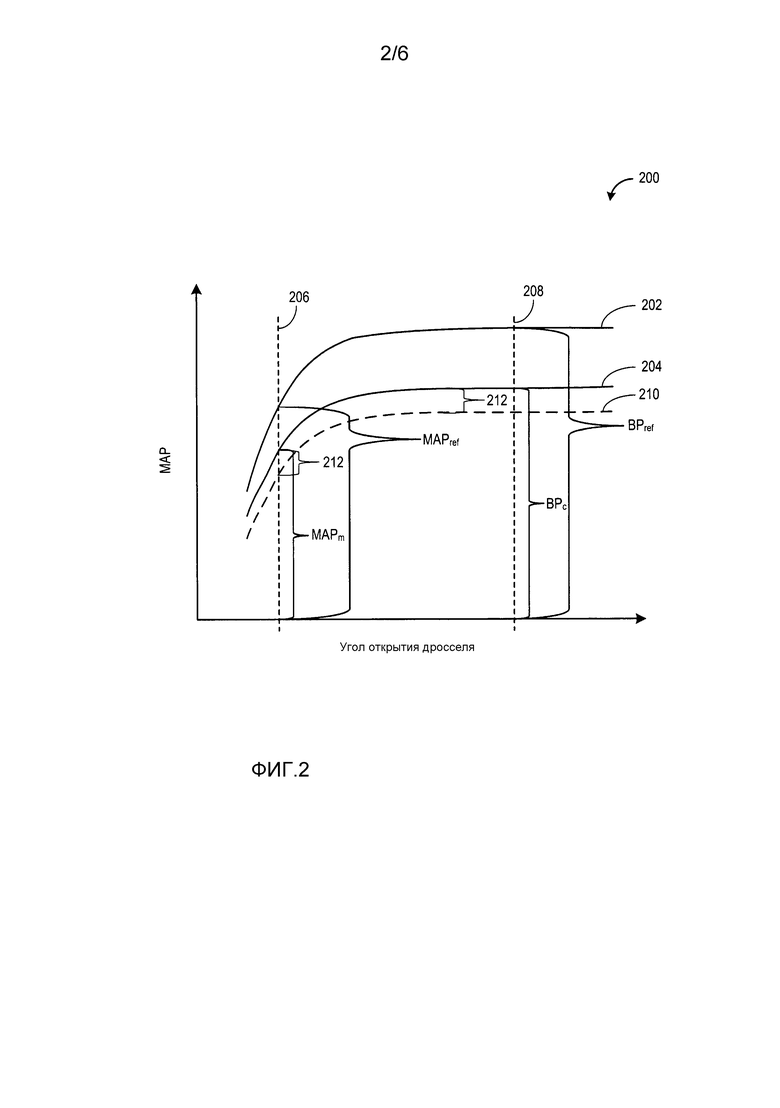
Зависимость между показаниями датчика MAP на двух разных высотах над уровнем моря показана на фиг. 2. Более точно, фиг. 2 показывает график 200 давления в коллекторе (MAP) в зависимости от угла открытия дросселя. Каждая линия на графике 200 находится на разном BP. Линия 202 предназначена для первого BP. Первое BP может быть опорным BP. В одном из примеров, первое BP может быть BP на первой высоте над уровнем моря, такой как уровень моря. Линия 204 предназначена для второго BP, второе BP является более низким, чем первое BP. По существу, второе BP может представлять вторую высоту над уровнем моря, более высокую, чем первая высота над уровнем моря.
Как обсуждено выше, линия 202 может представлять опорное BP наряду с тем, что линия 204 может представлять BP на текущем возвышении (на котором работает транспортное средство). Таким образом, измеренное MAP, MAPm, является MAP, измеренным датчиком MAP при текущих возвышении, BP и условиях эксплуатации двигателя. Кроме того, MAPm показано при текущем угле открытия дросселя, как показано на линии 206. Текущий угол открытия дросселя (линия 206) может быть меньшим, чем пороговый угол открытия дросселя, как обсуждено выше. График 200 также показывает текущее BP, BPc, на текущей высоте над уровнем моря (линия 204). BPc может быть тем, что датчик MAP показывал бы до того, как двигатель запускается, или при более высоком угле открытия дросселя, таком как WOT. Таким образом, в одном из примеров, линия 208 может представлять WOT. В других примерах, линия 208 может представлять угол открытия дросселя, меньший, чем WOT, но больший, чем пороговый угол открытия дросселя.
График 200 также показывает опорное BP, BPref, на линии 202. В способах, дополнительно описанных ниже, опорное BP может выбираться на калиброванном опорном значении, таком как BP на уровне моря ли BP при запуске двигателя (например, при включении зажигания перед эксплуатацией двигателя). Опорное MAP, MAPref, может рассчитываться (например, оцениваться) при текущем угле открытия дросселя (линия 206) и опорном BP (линия 202). MAPref также может рассчитываться на основании текущих числа оборотов двигателя и положения распределительного вала. Способ для расчета MAPref дополнительно обсужден ниже со ссылкой на фиг. 4 и может включать в себя итерационный способ для определения значения MAP с использованием модели дросселя, чтобы логически выводить поток воздуха и характеристику коэффициента наполнения.
Как показано на графике 200, отношение BP на текущей высоте над уровнем моря, BPc, к BP на опорной высоте над уровнем моря, BPref, может быть по существу равным отношению измеренного MAP на текущей высоте над уровнем моря, MAPm, к рассчитанному MAP на опорной высоте над уровнем моря, MAPref. Эта зависимость может быть представлена уравнением 1:
 (1)
(1)
Уравнение 1 может быть перекомпоновано для определения BPc, как показано в уравнении 2:
 (2)
(2)
Таким образом, BP в любых условиях эксплуатации двигателя, во время работы транспортного средства, может оцениваться с использованием зависимостей давления, показанных на фиг. 2.
В некоторых примерах, датчик MAP может становиться подвергнутым ухудшению характеристик или включать в себя смещение, которое может снижать точность выходного значения MAP. Смещение датчика MAP может определяться с использованием зависимости степени повышения давления, описанной выше. После определения смещения датчика, выходной сигнал датчика MAP может подвергаться поправке с использованием определенного смещения. Фиг. 2 показывает примерное смещение датчика MAP на 212. Смещение 212 датчика MAP может быть по существу постоянным значением давления, которое может побуждать датчик MAP показывать давление, на некоторую величину более высокое или более низкое, чем действующее MAP. Величиной может быть смещение 212. Как показано на фиг. 2, смещение, показанное на 212, может побуждать выходной сигнал датчика MAP давать показание, как показанное на линии 210, вместо показания действующего MAP, как показанное на линии 204. В одном из примеров, смещение 212 может быть отрицательным смещением, из условия чтобы датчик MAP показывал значение MAP, более низкое, чем действующее MAP. Если смещение (например, абсолютное значение смещения) возрастает выше порогового значения смещения, контроллер может указывать водителю транспортного средства, что датчик MAP подвергнут ухудшению характеристик.
Для определения смещения, переменная смещения может быть добавлена в уравнение 1, как показано в уравнении 3:
 (3)
(3)
Перекомпоновка для решения относительно смещения дает в результате уравнение 4:

 (4)
(4)
Однако, далее, в уравнении 4, BP на текущей высоте над уровнем моря, BPc, теперь является выходным сигналом (например, показанием) датчика MAP до того, как двигатель запускается (например, при включении зажигания двигателя), или когда двигатель является работающим на или около (в пределах порогового значения от) WOT. Дополнительно, MAP текущего измерения, MAPm, является MAP, измеренным по датчику MAP, когда двигатель является работающим при меньшем угле открытия дросселя (например, угле открытия дросселя ниже порогового угла открытия дросселя).
Кроме того, подробности об определении смещения датчика MAP обсуждены ниже со ссылкой на фиг. 5. После определения смещения, выходной сигнал датчика MAP может корректироваться на смещение. При определении BP в любом рабочем состоянии (при более низких углах открытия дросселя), как показано в уравнении 1, MAPm может включать в себя поправку смещения.
Таким образом, способ для двигателя может содержать, во время углов открытия дросселя, меньших, чем пороговое значение, и в то время как двигатель выполняет сгорание, настройку рабочего состояния двигателя на основании барометрического давления, барометрическое давление основано на текущем давлении в коллекторе относительно опорного давления в коллекторе при текущем угле открытия дросселя и опорном барометрическом давлении. В одном из примеров, опорное барометрическое давление основано на измеренном давлении в коллекторе и на одном или более из широко открытого дросселя или запуска двигателя. В еще одном примере, опорное барометрическое давление является предопределенным давлением на опорной высоте над уровнем моря.
Текущее давление в коллекторе может быть основано на давлении в коллекторе, измеренном датчиком давления в коллекторе, и смещении датчика у датчика давления в коллекторе, датчик давления в коллекторе расположен во впускном коллекторе двигателя. Способ дополнительно может содержать оценивание смещения датчика на основании первого отношения между текущим давлением в коллекторе и опорным давлением в коллекторе и второго отношения между текущим барометрическим давлением и опорным барометрическим давлением, текущее барометрическое давление основано на выходном сигнале датчика давления в коллекторе во время одного из широко открытого дросселя или запуска двигателя.
В одном из примеров, способ может включать в себя многократное оценивание опорного давления в коллекторе на основании текущего угла открытия дросселя, опорного барометрического давления, числа оборотов двигателя и положения распределительного вала. В еще одном примере, способ может включать в себя оценивание опорного давления в коллекторе на основании массового расхода воздуха, измеренного по датчику массового расхода воздуха, угла открытия дросселя и опорного барометрического давления. В еще одном другом примере, способ может включать в себя оценивание опорного давления в коллекторе на основании коэффициента наполнения двигателя, коэффициент наполнения двигателя основан на числе оборотов двигателя, положении распределительного вала и измеренном массовом расходе воздуха.
Способ дополнительно может содержать, во время углов открытия дросселя, больших, чем пороговое значение, и в то время как двигатель является осуществляющим сгорание, настройку рабочего состояния двигателя на основании барометрического давления, барометрическое давление основано на текущем давлении в коллекторе и падении давления на впускном дросселе. В одном из примеров, настройка рабочего состояния двигателя на основании барометрического давления включает в себя одно или более из настройки заряда воздуха в цилиндре, топливо-воздушного соотношения, установки момента зажигания или потока рециркуляции отработавших газов.
В качестве еще одного варианта осуществления, способ для двигателя может содержать указание ухудшения характеристик датчика давления в коллекторе на основании смещения датчика, смещение датчика основано на давлении в коллекторе, измеренном при первом угле открытия дросселя, барометрическом давлении при втором угле открытия дросселя, опорном давлении в коллекторе при первом угле открытия дросселя и опорном барометрическом давлении, и опорном барометрическом давлении. В качестве одного из примеров, первый угол открытия дросселя может быть меньшим, чем пороговый угол открытия дросселя, а второй угол открытия дросселя может быть большим, чем пороговый угол открытия дросселя. Дополнительно, опорное барометрическое давление может быть предопределенным давлением на опорной высоте над уровнем моря, опорная высота над уровнем моря является уровнем моря.
В одном из примеров, указание ухудшения характеристик включает в себя указание ухудшения характеристик в ответ на смещение датчика, большее, чем пороговое значение смещения. Пороговое значение смещения может быть основано на одном или более из предопределенного смещения датчика или требуемого процента точности датчика давления в коллекторе. Способ дополнительно может содержать определение барометрического давления на основании выходного сигнала датчика давления в коллекторе во время одного из работы двигателя при широко открытом дросселе или включения зажигания двигателя.
Давление в коллекторе может измеряться датчиком давления в коллекторе, в то время как двигатель, в котором установлен датчик давления в коллекторе, выполняет сгорание, и когда первый угол открытия дросселя меньше, чем пороговый угол открытия дросселя, датчик давления в коллекторе расположен во впускном коллекторе двигателя. Способ дополнительно может содержать многократное оценивание опорного давления в коллекторе на основании первого угла открытия дросселя, опорного барометрического давления, числа оборотов двигателя и положения распределительного вала. В еще одном примере, способ может содержать оценивание опорного давления в коллекторе на основании оценки массового расхода воздуха во время работы при первом угле открытия дросселя и коэффициента наполнения двигателя, коэффициент наполнения двигателя основан на числе оборотов двигателя, положении распределительного вала и оцененном массовом расходе воздуха.
Способ дополнительно может содержать коррекцию выходного сигнала датчика давления в коллекторе на смещение датчика, чтобы определять скорректированное давление в коллекторе. Работа двигателя, в таком случае, может настраиваться на основании скорректированного давления в коллекторе.
Далее, с обращением к фиг. 3, показан способ 300 для оценки барометрического давления (BP) на основании угла открытия дросселя у впускного дросселя. Более точно, способ 300 показывает определение, какой способ и условия эксплуатации двигателя следует использовать для расчета барометрического давления на текущей высоте над уровнем моря (например, текущем барометрическом давлении), способ выбирается на основании угла открытия дросселя относительно порогового угла открытия дросселя. Команды для выполнения способа 300 могут храниться в памяти контроллера (такого как контроллер 12, показанный на фиг. 1). Кроме того, контроллер может выполнять способ 300, описанный ниже.
Способ 300 начинается на 302 оценкой и/или измерением условий эксплуатации двигателя. Условия эксплуатации двигателя могут включать в себя число оборотов и нагрузку двигателя, угол открытия дросселя, MAP, MAF, положение распределительного вала, поток EGR, температуры двигателя, и т. д. На 304, способ включает в себя определение, является ли угол открытия дросселя у впускного дросселя (например, дросселя 21, показанного на фиг. 1) большим, чем пороговый угол открытия дросселя. В одном из примеров, угол открытия дросселя может определяться по датчику положения дросселя на впускном дросселе. Пороговый угол дроссель может быть пороговым углом открытия дросселя, ниже которого падение давления на дросселе возрастает до уровня, приводящего к пониженной точности оценки BP и являющегося результатом управления двигателем. Таким образом, оценивание BP на основании MAP может быть точным (например, до требуемой относительной точности, такой как 90%) только для углов открытия дросселя выше порогового угла открытия дросселя. Таким образом, если угол открытия дросселя больше, чем пороговый угол открытия дросселя (например, на или около WOT), способ продолжается на 308, чтобы оценивать BP на основании выходного сигнала датчика MAP (например, текущего MAP). В некоторых примерах, BP может быть основано на выходном сигнале датчика MAP плюс падении давления на дросселе. В других примерах, таких как при WOT, BP может оцениваться по существу равным выходному сигналу датчика MAP (например, BP является приблизительно таким же, как MAP при WOT). Как обсуждено выше, падение давления на дросселе может моделироваться в качестве функции угла открытия дросселя и потока воздуха через дроссель (например, массового расхода воздуха).
В качестве альтернативы, на 304, если угол открытия дросселя не больше, чем пороговый угол открытия дросселя, способ продолжается на 306. На 306, контроллер может оценивать (например, рассчитывать) BP на основании текущего MAP (измеренного датчиком MAP) относительно опорного MAP при текущем угле открытия дросселя и опорном барометрическом давлении. Способ на 306 представлен подробнее на фиг. 4. После оценки текущего BP с использованием одного из способов на 308 или 306, способ продолжается на 310, чтобы настраивать условия эксплуатации двигателя на основании оцененного BP. Условия эксплуатации двигателя могут включать в себя одно или более из заряда воздуха (например, количества воздуха, поступающего в цилиндр двигателя для сгорания), требуемого топливо-воздушного соотношения двигателя, установки момента зажигания и/или требуемого уровня EGR. В одном из примеров, по мере того, как BP возрастает, контроллер может осуществлять запаздывание установки момента зажигания и/или повышать топливо-воздушное соотношение.
Фиг. 4 показывает способ 400 для оценивания BP на основании измеренного MAP относительно опорного MAP и опорного BP. Способ 400 продолжается из способа 300 после определения, что угол открытия дросселя у впускного дросселя меньше, чем (или равен) пороговый угол открытия дросселя. Как результат, BP может определяться с использованием зависимости между отношением барометрических давлений на двух разных высотах над уровнем моря (например, возвышениях) и MAP на двух разных высотах над уровнем моря, как представлено выше со ссылкой на фиг. 2.
Способ 400 начинается на 402 измерением текущего MAP (например, MAP на текущей высоте транспортного средства над уровнем моря) датчиком MAP, датчик MAP расположен во впускном коллекторе. На 404, контроллер может корректировать измеренное MAP на основании смещения датчика MAP. Смещение (или ошибка) датчика MAP может определяться с использованием способа отношения давлений, показанного на фиг. 5. В других вариантах осуществления, способ 400 может не включать в себя коррекцию измеренного MAP на смещение, а взамен, использовать измеренное MAP для определения BP на 408.
На 406, способ включает в себя определение опорного MAP при текущем угле открытия дросселя и опорном BP. В одном из примеров, предопределенное опорное BP может храниться в памяти контроллера. Например, опорное BP может иметь значение BP на уровне моря или другой опорной высоте над уровнем моря (например, высоте над уровнем моря, большей, чем уровень моря). В еще одном примере, опорное BP может определяться до работы двигателя, при запуске транспортного средства (например, включении зажигания двигателя). Опорное MAP может определяться итерационным способом, использующим модель дросселя и коэффициент наполнения двигателя. Более точно, модель дросселя может использовать текущий угол открытия дросселя, MAP и давление выше по потоку (например, опорное BP), чтобы логически выводить массовый расход воздуха. Этот способ может использоваться, если двигатель не включает в себя датчик MAF. Однако, если двигатель не включает в себя датчик MAF, опорное MAP может определяться с использованием модели дросселя и измеренного MAF, текущего угла открытия дросселя и опорного BP.
Коэффициент наполнения двигателя затем может использоваться для логического вывода MAP из логически выведенного массового расхода воздуха, текущего числа оборотов двигателя и текущего положения распределительного вала. При любых заданных числе оборотов двигателя и положении распределительного вала, MAP является функцией заряда воздуха, как показано уравнением 5:
 (5)
(5)
Поток воздуха в уравнении 5 является логически выведенным потоком воздуха из модели дросселя. MAP, в таком случае, может логически выводиться из получающегося в результате значения заряда воздуха. Расчет по уравнению 5 и уравнению модели дросселя выполняется многократно, для того чтобы определять опорное MAP при текущем угле открытия дросселя и опорном BP. В качестве альтернативы, если двигатель включает в себя датчик MAF или другое средство оценивания массового расхода воздуха, контроллер может оценивать опорное MAP на основании коэффициента наполнения двигателя и оцененного (или измеренного) массового расхода воздуха с использованием уравнения 5.
На 408, способ включает в себя оценивание (например, расчет) текущего BP (например, BP на текущей высоте над уровнем моря) на основании отношения между текущим скорректированным MAP, определенным на 404, опорным MAP, определенным на 406, и опорным BP. Это делается с использованием уравнения 2, как описано выше и воспроизведено ниже:
 (2)
(2)
В уравнении 2, BPc - BP на текущей высоте вождения над уровнем моря, MAPm - MAP, измеренное датчиком MAP и, по выбору, скорректированное на смещение датчика, BPref - опорное BP, и MAPref - опорное MAP.
В одном из примеров, оценка BP способом 400 может выполняться непрерывно, в то время как угол открытия дросселя находится ниже порогового угла открытия дросселя. В других примерах, оценка BP способом 400 может выполняться после порогового изменения MAP (например, когда измеренное MAP изменяется на пороговую величину, контроллер повторно рассчитывает BP), в то время как угол открытия дросселя находится ниже порогового угла открытия дросселя. В еще одном другом примере, оценка BP способом 400 может выполняться после того, как прошла некоторая длительность после последней оценки BP. Таким образом, оценка BP может выполняться с установленными временными интервалами.
Далее, с обращением к фиг. 5, показан способ 500 для определения смещения датчика MAP. Способ 500 начинается на 502 посредством измерения MAP датчиком MAP, когда двигатель является работающим при угле открытия дросселя, меньшем, чем пороговый угол открытия дросселя. В еще одном примере, MAP может измеряться, когда двигатель является работающим при любом угле открытия дросселя, меньшем, чем WOT. Угол открытия дросселя, при котором MAP измеряется на 502, может указываться ссылкой в материалах настоящей заявки как первый угол открытия дросселя.
На 504, способ включает в себя определение опорного MAP при текущем угле открытия дросселя (например, первом угле открытия дросселя) и опорном BP. Способ на 504 может включать в себя итерационный способ, использующий модель дросселя и зависимость коэффициента наполнения двигателя, как обсуждено на 406 по фиг. 4. Таким образом, способ на 504 может придерживаться способа, описанного на 406. Поскольку двигатель может не включать в себя датчик MAF, поток воздуха (например, массовый расход воздуха) логически выводиться из модели дросселя, а затем, используется в зависимости коэффициента наполнения. Получающееся в результате значение MAP на 504 является рассчитанным значением MAP, основанным на угле открытия дросселя, опорном BP (например, предопределенном BP на опорной высоте над уровнем моря, такой как уровень моря), числе оборотов двигателя и положении распределительного вала. В альтернативных вариантах осуществления, массовый расход воздуха может оцениваться с использованием альтернативного способа, основанного на альтернативных показаниях датчиков или условиях эксплуатации двигателя. Этот оцененный массовый расход воздуха затем может использоваться с уравнением коэффициента наполнения (уравнением 5) для определения опорного MAP при опорном BP и текущем массовом расходе воздуха (вместо текущего угла открытия дросселя). В еще одном другом примере, способ 500 по-прежнему может использоваться для определения смещения, если двигатель не включает в себя датчик MAF. В этом варианте осуществления, способ на 504 может включать в себя использование выходного сигнала датчика MAF для определения массового расхода воздуха и, впоследствии, опорного MAP.
На 506, способ включает в себя определение BP на текущей высоте над уровнем моря и при втором угле открытия дросселя, второй угол открытия дросселя является иным, чем первый угол открытия дросселя. BP на текущей высоте над уровнем моря может быть выходным сигналом (например, показанием) датчика MAP перед тем, как двигатель запускается (например, при включении зажигания двигателя) или выходным сигналом датчика MAP при или около (например, в пределах порогового значения от) WOT. Таким образом, BP на текущей высоте над уровнем моря может быть MAP, измеренным датчиком MAP в одном или более состояний на 508 или 510. Кроме того, второй угол открытия дросселя может быть большим, чем первый угол открытия дросселя.
После 506, способ продолжается на 512, чтобы рассчитывать смещение датчика MAP на основании первого отношения между MAP при меньшем угле открытия дросселя (например, MAPm, показанным в уравнениях 3 и 4 при первом угле открытия дросселя) и опорным MAP, и второго отношения между BP на текущей высоте над уровнем моря (например, BPc, показанным в уравнениях 3 и 4 при втором угле открытия дросселя) и опорным BP. Смещение датчика MAP прибавляется к любым значениям, измеренным по датчику MAP (например, MAPm и BPc). Первое отношение и второе отношение, в таком случае, устанавливаются равными друг другу, как показано в уравнении 3, и смещение отыскивается, как показано в уравнении 4.
(4)
Таким образом, способ на 512 включает в себя ввод значений MAP и BP, определенных на 502-506, а затем, решение уравнения 4 относительно смещения датчика.
На 514, способ включает в себя определение, является ли рассчитанное смещение датчика большим, чем пороговое значение смещения. Пороговое значение смещения может быть основано на требуемой точности датчика MAP или предопределенном базовом смещении датчика, определенном для датчика MAP. Если рассчитанное смещение не больше, чем пороговое значение смещения, способ продолжается на 516, чтобы корректировать выходной сигнал датчика MAP на основании смещения. Способ на 516 может включать в себя прибавление смещения к показанию датчика MAP. Таким образом, все значения MAP, измеренные датчиком MAP, могут корректироваться на это смещение датчика. Смещение датчика MAP может применяться к способам на 306 и 308 по фиг. 3. Настройки исполнительных механизмов или рабочего состояния двигателя на основании BP и/или MAP, в таком случае, могут настраиваться на основании значений BP и MAP, которые были скорректированы на смещение. Таким образом, смещение датчика MAP может применяться к показаниям с датчика MAP, когда двигатель является работающим при любом угле открытия дросселя. В качестве альтернативы, на 515, если смещение датчика MAP больше, чем пороговое значение смещения, способ продолжается на 518, чтобы указывать ухудшение характеристик датчика MAP. В одном из примеров, способ на 518 может включать в себя уведомление водителя транспортного средства, что датчик MAP подвергнут ухудшению характеристик. В еще одном примере, способ на 518 может включать в себя как указание ухудшения характеристик датчика MAP, так и продолжение корректировать смещение датчика MAP на основании смещения.
Фиг. 6 показывает графический пример настроек рабочего состояния (например, параметров) двигателя в ответ на оцененное барометрическое давление (BP). Более точно, график 600 показывает изменения барометрического давления (BP) на графике 602, изменения измеренного MAP на графике 604, изменения скорректированного MAP на графике 606, изменения угла открытия дросселя на графике 608, изменения высоты над уровнем моря в поездке (например, возвышения, на котором движется автомобиль) на графике 610, изменения топливо-воздушного соотношения двигателя на графике 612, изменения установки момента зажигания на графике 614 и изменения смещения датчика MAP на графике 616. Как обсуждено выше, двигатель может не включать в себя датчик BP. По существу, BP на графике 602 может быть оцененным BP, оцениваемым по выходному сигналу датчика MAP и дополнительных условий эксплуатации двигателя на основании угла открытия дросселя относительно порогового угла открытия дросселя, T1. Измеренное MAP может измеряться датчиком MAP. В некоторых примерах, датчик MAP может иметь смещение, дающее в результате ошибку между MAP, которое измеряет датчик, и действующим MAP. Таким образом, как описано выше на фиг. 5, смещение датчика может определяться, а затем, использоваться для коррекции выходного сигнала датчика MAP (например, измеренного MAP). График 606 показывает подвергнутое поправке на смещение скорректированное MAP.
До момента t1 времени, дроссель может быть действующим на угле открытия дросселя, большем, чем пороговый угол открытия дросселя, T1. Как результат, контроллер может оценивать BP на основании измеренного и скорректированного MAP (графики 604 и 606). В момент t1 времени, транспортное средство может спускаться с более высокой высоты над уровнем моря (график 610). По мере того, как высота над уровнем моря убывает, оцененное BP (график 602) возрастает. Прямо после момента t1 времени, угол открытия дросселя уменьшается ниже порогового угла T1 открытия дросселя. Таким образом, после этого момента времени, контроллер оценивает BP на основании скорректированного MAP (график 606) и рассчитанного опорного MAP при текущем угле открытия дросселя и опорном BP, BPref. Как описано на фиг. 3-4, BP может оцениваться с использованием зависимости отношений между двумя BP и двумя MAP на разных высотах над уровнем моря, в то время как угол открытия дросселя находится ниже порогового угла T1 открытия дросселя. В то время как BP убывает, контроллер может понижать топливо-воздушное соотношение (график 612) и/или осуществлять опережение установки момента зажигания ближе к MBT (график 614). В других примерах, контроллер может настраивать дополнительные или альтернативные условия эксплуатации двигателя (например, с помощью настройки исполнительных механизмов двигателя) в ответ на изменяющееся BP.
В момент t2 времени, высота над уровнем моря начинает возрастать, тем самым, понижая BP. Дополнительно, прямо после момента t2 времени, угол открытия дросселя возрастает выше порогового угла T1 открытия дросселя (график 608). Как результат, контроллер может возвращаться к оцениванию BP на основании скорректированного MAP (график 606). По мере того, как BP убывает, контроллер может осуществлять запаздывание установки момента зажигания (график 614) и/или повышать топливо-воздушное соотношение, чтобы делать топливо-воздушное соотношение более богатым (график 612). В момент t3 времени, смещение датчика MAP возрастает выше порогового значения смещения, T2. В ответ, контроллер может указывать ухудшение характеристик датчика MAP, уведомляя водителя транспортного средства. В одном из примеров, после момента t3 времени, контроллер может продолжать коррекцию измеренного MAP на смещение. Как показано на графиках 606 и 604, смещение прибавляется к измеренному MAP (график 604) для получения скорректированного MAP (график 606). Таким образом, по мере того, как смещение возрастает, увеличивается разность между измеренным MAP и скорректированным MAP.
Как показано на фиг. 6, во время первого состояния (как показанное между моментом t1 времени и моментом t2 времени), когда угол открытия дросселя у впускного дросселя меньше, чем пороговое значение, и в то время как двигатель выполняет сгорание, настраивают рабоче состояние двигателя на основании барометрического давления, барометрическое давление основано на отношении между измеренным давлением в коллекторе, опорным давлением в коллекторе и опорным барометрическим давлением. Во время второго состояния (как показано до момента t1 времени и после момента t2 времени), когда угол открытия дросселя больше, чем пороговое значение, настраивают рабочее состояние двигателя на основании барометрического давления, барометрическое давление основано на измеренном давлении в коллекторе.
Измеренное давление в коллекторе измеряется датчиком давления в коллекторе, расположенным во впускном коллекторе двигателя, на текущей высоте над уровнем моря в поездке и при угле открытия дросселя. Кроме того, как показано на графике 606, измеренное давление в коллекторе может корректироваться на смещение датчика давления в коллекторе, смещение датчика давления в коллекторе основано на измеренном давлении в коллекторе, оцененном барометрическом давлении на текущей высоте над уровнем моря, опорном давлении в коллекторе при текущем угле открытия дросселя и опорном барометрическом давлении, и опорном барометрическом давлении.
Опорное давление в коллекторе может быть оцененным давлением в коллекторе при опорном барометрическом давлении и угле открытия дросселя во время первого состояния, опорное давление в коллекторе основано на одном или более из угла открытия дросселя, массового расхода воздуха, положения распределительного вала или числа оборотов двигателя. Дополнительно, барометрическое давление во время второго состояния может быть дополнительно основано на падении давления на впускном дросселе, падение давления основано на угле открытия дросселя и массовом расходе воздуха. Как показано после момента t2 времени, настройка рабочего состояния двигателя на основании барометрического давления может включать в себя одно или более из повышения топливо-воздушного соотношения или осуществления запаздывания установки момента зажигания в ответ на понижающееся барометрическое давление. В одном из примеров, опорное барометрическое давление является предопределенным барометрическим давлением на уровне моря.
В качестве еще одного варианта осуществления, способ для двигателя содержит настройку работы двигателя на основании скорректированного давления в коллекторе, скорректированное давление в коллекторе основано на смещении датчика давления в коллекторе, смещение основано на зависимости между давлением в коллекторе при первом угле открытия дросселя, опорным давлением в коллекторе, опорным барометрическим давлением и барометрическим давлением при вором угле открытия дросселя. Способ дополнительно содержит указание ухудшения характеристик датчика давления в коллекторе в ответ на смещение, большее, чем пороговое значение смещения.
Первый угол открытия дросселя может быть меньшим, чем второй угол открытия дросселя. Дополнительно, в одном из примеров, первый угол открытия дросселя может быть меньшим, чем пороговый угол открытия дросселя, а второй угол открытия дросселя может иметь значение широко открытого дросселя. Способ дополнительно может содержать оценивание опорного давления в коллекторе на основании первого угла открытия дросселя, опорного барометрического давления, числа оборотов двигателя и положения распределительного вала. В одном из примеров, опорное барометрическое давление является предопределенным барометрическим давлением на уровне моря. Кроме того, давление в коллекторе может измеряться датчиком давления в коллекторе. Барометрическое давление может оцениваться на основании выходного сигнала датчика давления в коллекторе при одном из широко открытого дросселя или включения зажигания двигателя. Способ дополнительно может включать в себя оценивание барометрического давления во время углов открытия дросселя, меньших, чем пороговое значение, на основании давления в коллекторе, опорного давления в коллекторе и опорного барометрического давления.
Таким образом, технический результат изобретения достигается посредством оценки BP при любом угле открытия дросселя и, впоследствии, настройки работы двигателя на основании оцененного BP. Когда угол открытия дросселя у впускного дросселя больше, чем пороговое значение, BP может оцениваться на основании выходного сигнала датчика MAP и падения давления на впускном дросселе. В качестве альтернативы, когда угол открытия дросселя меньше, чем или равен пороговому значению, BP может оцениваться на основании первого отношения между измеренным давлением в коллекторе при текущем угле открытия дросселя и BP, и опорным давлением в коллекторе при текущем угле открытия дросселя и опорном BP, и второго отношения между текущим BP и опорным BP. Кроме того, выходной сигнал датчика MAP может корректироваться на основании смещения датчика MAP. Как результат, работа двигателя может настраиваться на основании скорректированного MAP и оцененных значений BP.
В качестве еще одного варианта осуществления, способ для двигателя может включать в себя оценку опорного давления в коллекторе на основании опорного барометрического давления, угла открытия дросселя, числа оборотов двигателя и положения распределительного вала; измерение текущего давления в коллекторе датчиком давления в коллекторе; и оценку текущего барометрического давления на основании отношения между текущим давлением в коллекторе, опорным давлением в коллекторе и опорным барометрическим давлением. В качестве еще одного другого варианта осуществления, способ для двигателя может включать в себя измерение текущего давления в коллекторе датчиком давления в коллекторе, когда угол открытия дросселя у впускного дросселя меньше, чем пороговое значение; оценку опорного давления в коллекторе на основании угла открытия дросселя и опорного барометрического давления; оценку барометрического давления на основании выходного сигнала датчика давления в коллекторе, когда угол открытия дросселя является углом при широко открытом дросселе; и оценку смещения датчика давления в коллекторе на основании зависимости между текущим давлением в коллекторе, опорным давлением в коллекторе, опорным барометрическим давлением и оцененным барометрическим давлением.
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Способы и процедуры управления, раскрытые в материалах настоящей заявки, могут храниться в качестве исполняемых команд в постоянной памяти. Специфичные процедуры, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машинно-читаемого запоминающего носителя в системе управления двигателем.
Будет принято во внимание, что конфигурации и процедуры, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.



Изобретение относится к двигателям внутреннего сгорания с датчиком давления в коллекторе. Технический результат заключается в указании ухудшения характеристик датчика давления в коллекторе. Предложен способ определения смещения датчика давления в коллекторе, который включает в себя указание ухудшения характеристик датчика давления в коллекторе на основании смещения датчика, смещение датчика основано на давлении в коллекторе, измеренном при первом угле открытия дросселя, барометрическом давлении при втором угле открытия дросселя, опорном давлении в коллекторе при первом угле открытия дросселя и опорном барометрическом давлении. Также способ может включать в себя коррекцию выходного сигнала датчика давления в коллекторе на определенное смещение датчика. 3 н. и 17 з.п. ф-лы, 6 ил.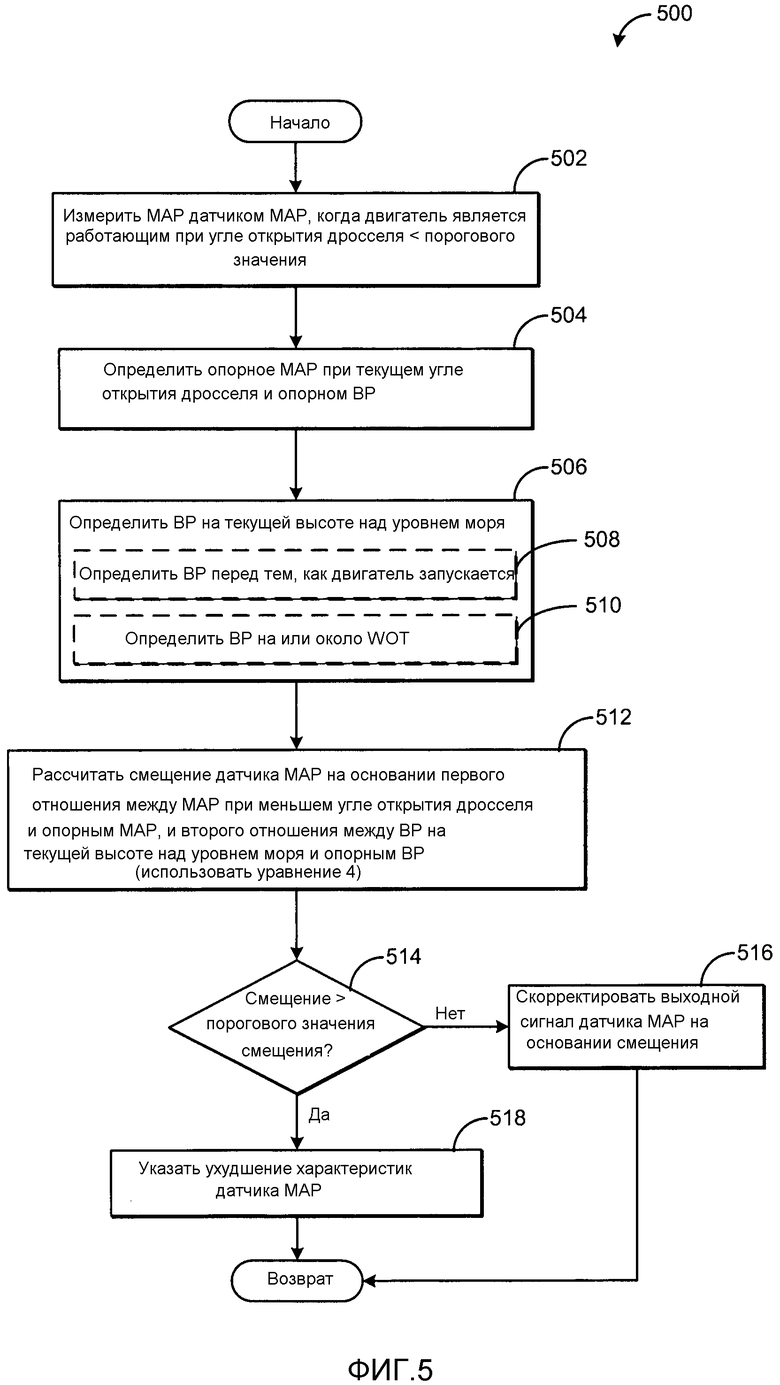
1. Способ эксплуатации двигателя, состоящий в том, что:
во время работы двигателя, когда двигатель, по меньшей мере, вращается
измеряют давление в коллекторе при первом угле открытия дросселя;
определяют барометрическое давление при втором угле открытия дросселя;
указывают ухудшение характеристик датчика давления в коллекторе на основании смещения датчика, причем смещение датчика определяют посредством приравнивания первого отношения между давлением в коллекторе и опорным давлением в коллекторе, определенным при первом угле открытия дросселя и при опорном барометрическом давлении, и второго отношения между барометрическим давлением и опорным барометрическим давлением, причем упомянутое указание включает в себя уведомление водителя; и
настраивают работу двигателя на основании смещения датчика.
2. Способ по п. 1, в котором указание ухудшения характеристик заключается в том, что указывают ухудшение характеристик в ответ на смещение датчика, большее чем пороговое значение смещения.
3. Способ по п. 2, в котором пороговое значение смещения основано на одном или более из предопределенного смещения датчика или требуемого процента точности датчика давления в коллекторе.
4. Способ по п. 1, в котором первый угол открытия дросселя меньше, чем пороговый угол открытия дросселя, а второй угол открытия дросселя больше, чем пороговый угол открытия дросселя.
5. Способ по п. 1, в котором опорное барометрическое давление является предопределенным давлением на опорной высоте над уровнем моря, причем опорная высота над уровнем моря является уровнем моря.
6. Способ по п. 1, дополнительно состоящий в том, что определяют барометрическое давление на основании выходного сигнала датчика давления в коллекторе во время одного из работы двигателя при широко открытом дросселе или включения зажигания двигателя.
7. Способ по п. 1, в котором давление в коллекторе измеряется датчиком давления в коллекторе, в то время как двигатель выполняет сгорание, и когда первый угол открытия дросселя меньше, чем пороговый угол открытия дросселя, при этом датчик давления в коллекторе расположен во впускном коллекторе двигателя.
8. Способ по п. 7, дополнительно состоящий в том, что определяют число оборотов двигателя и положение распределительного вала при первом угле открытия дросселя и многократно оценивают опорное давление в коллекторе на основании первого угла открытия дросселя, опорного барометрического давления, числа оборотов двигателя и положения распределительного вала.
9. Способ по п. 1, дополнительно состоящий в том, что оценивают опорное давление в коллекторе на основании оценки массового расхода воздуха во время работы при первом угле открытия дросселя и коэффициента наполнения двигателя, причем коэффициент наполнения двигателя основан на числе оборотов двигателя, положении распределительного вала и оцененном массовом расходе воздуха.
10. Способ по п. 1, дополнительно состоящий в том, что корректируют выходной сигнал датчика давления в коллекторе на смещение датчика, чтобы определять скорректированное давление в коллекторе.
11. Способ по п. 10, в котором настройка работы двигателя содержит настройку работы двигателя на основании скорректированного давления в коллекторе.
12. Способ эксплуатации двигателя, состоящий в том, что:
настраивают работу двигателя на основании скорректированного давления в коллекторе, причем скорректированное давление в коллекторе основано на смещении датчика давления в коллекторе, упомянутое смещение определяют, когда двигатель, по меньшей мере, вращается посредством измерения давления в коллекторе при первом угле открытия дросселя, определения барометрического давления при втором угле открытия дросселя и приравнивания первого отношения между давлением в коллекторе и опорным давлением в коллекторе и второго отношения между барометрическим давлением и опорным барометрическим давлением; и
указывают ухудшение характеристик датчика давления в коллекторе посредством уведомления водителя в ответ на смещение, большее чем пороговое значение смещения.
13. Способ по п. 12, в котором первый угол открытия дросселя меньше, чем второй угол открытия дросселя.
14. Способ по п. 12, в котором первый угол открытия дросселя меньше, чем пороговый угол открытия дросселя, а второй угол открытия дросселя является углом при широко открытом дросселе.
15. Способ по п. 12, дополнительно состоящий в том, что определяют число оборотов двигателя и положение распределительного вала при первом угле открытия дросселя и оценивают опорное давление в коллекторе на основании первого угла открытия дросселя, опорного барометрического давления, числа оборотов двигателя и положения распределительного вала.
16. Способ по п. 12, в котором опорное барометрическое давление является предопределенным барометрическим давлением на уровне моря.
17. Способ по п. 12, в котором давление в коллекторе измеряется датчиком давления в коллекторе, и при этом барометрическое давление оценивается на основании выходного сигнала датчика давления в коллекторе при одном из широко открытого дросселя или включения зажигания двигателя.
18. Способ по п. 12, дополнительно состоящий в том, что оценивают барометрическое давление во время углов открытия дросселя, меньших чем пороговое значение, на основании давления в коллекторе, опорного давления в коллекторе и опорного барометрического давления.
19. Система для эксплуатации двигателя, содержащая:
впускной коллектор, соединенный с двигателем;
дроссель, расположенный во впускном коллекторе;
датчик давления в коллекторе, расположенный во впускном коллекторе и выполненный с возможностью определять измеренное давление в коллекторе; и
контроллер с машинно-читаемыми командами для, во время работы двигателя, когда двигатель, по меньшей мере, вращается:
измерения давления в коллекторе при первом угле открытия дросселя, меньшем, чем пороговое значение;
оценки барометрического давления при втором угле открытия дросселя, большем, чем первый угол открытия дросселя;
коррекции измеренного давления в коллекторе на смещение датчика давления в коллекторе, причем смещение датчика давления в коллекторе определено посредством приравнивания первого отношения между измеренным давлением в коллекторе и опорным давлением в коллекторе и второго отношения между оцененным барометрическим давлением и опорным барометрическим давлением; и
настройки работы двигателя на основании скорректированного давления в коллекторе.
20. Система по п. 19, в которой машинно-читаемые команды дополнительно включают в себя команды для указания ухудшения характеристик датчика давления в коллекторе посредством уведомления водителя, когда смещение датчика давления в коллекторе больше, чем пороговое значение смещения.
| US 2010023243 A1, 2010-01-28 | |||
| US 2006179926 A1, 2006-08-17 | |||
| US 2006277907 A1, 2006-12-14 | |||
| ДИЗЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2260140C1 |

