Изобретение относится к области спорта, а именно к способам оценки качества гребковых движений в целях повышения спортивного результата в гребле на байдарках.
Гребная локомоция происходит в гидродинамической среде, поэтому существенная смысловая часть гребка - подводная траектория движения лопасти - остается недоступной для визуального тренерского анализа.
Известно изобретение [патент WO №2016144208, кл. В63В 35/79, 09.03.2016, А.П. Кирпичников, ООО «Автекс», «Малоразмерное плавательное средство, преимущественно плавательная доска или лодка, выполненное с возможностью обзора подводного пространства»], позволяющее с помощью видеотехнологий просматривать пространство под водой.
Недостатком известного изобретения является необходимость видеокамер, расположенных на поверхности плавательного средства или буксируемых под водой, которые будут создавать существенное дополнительное гидродинамическое сопротивление и снижать спортивный результат.
Известно решение [патент US 20050064774, кл. В63В 35/79, 24.03.2005, G. Guerry, S. Marsea «Transparent surfboard with shark locating and repelling system»], в котором описано малоразмерное плавательное средство, а именно плавательная доска, имеющая прозрачный элемент с целью визуального обзора подводного пространства.
Недостатком известного решения является искаженное восприятие подводного пространства ввиду преломляющих особенностей прозрачного элемента и водной среды, необходимость внесения конструктивных изменение в спортивное судно, а также отсутствие возможности фиксировать биомеханические параметры гребка.
Известен способ [патент РФ, кл. G01C 11/00, 24.04.2000, Сибирский научно-исследовательский и производственный центр геоинформации и прикладной геодезии, В.И. Юрченко, «Способ бесконтактного определения пространственных координат точек объекта»], который содержит вариант нахождения координат по фотографическим снимкам.
Недостатком предложенного способа является его применимость только к неподвижным объектам в строительстве, архитектуре и медицине и невозможность его использования, когда объект находится в движении, а также в случае, если часть объекта скрыта под водой.
В области спорта известен способ [патент РФ №2399401, кл. А63В 69/12, 20.09.2010, бюл. №26 ФГОУВПО «Кубанский государственный университет физической культуры, спорта и туризма», Н.Г. Скрынникова, А.И. Погребной, А.А. Аришин, «Способ оценки техники гребковых движений рук при плавании кролем»], который содержит способ оценки техники плавания, основанный на боковой подводной видеосъемки пловца.
Недостатком данного способа при использовании в гребле является невозможность проведения подводной видеосъемки в гребле ввиду мутной воды гребных каналов и сложности прогнозирования места гребка. Кроме того, биомеханический анализ сложного пространственного движения, основанный на съемке одной камерой, является малоинформативным.
Наиболее близкий аналогом заявленного изобретения является способ изучения техники гребковых движений с помощью видеокамер и последующей пространственной реконструкции с применением программного приложения [Методика пространственной реконструкции подводной траектории движения весла как основа теоретических и прикладных исследований в гребном спорте / А.А. Померанцев. - Липецк: ФГБОУ ВПО «ЛГПУ», 2012. - 184 с.: ил.].
Недостатком предложенного метода является необходимость предварительного крепления к веслу дополнительной конструкции в виде антенны, используемой для регистрации движения весла вокруг собственной оси вращения. Данная конструкция воспринимается спортсменами как нежелательная, негативно влияющая на спортивный результат.
Изобретение направлено на устранение этих недостатков и позволяет определять, фиксировать и анализировать пространственно-временные параметры гребка в трехмерном пространстве на бесконтактной основе, не внося конструктивных изменений в весло и не создавая помех для движений гребца.
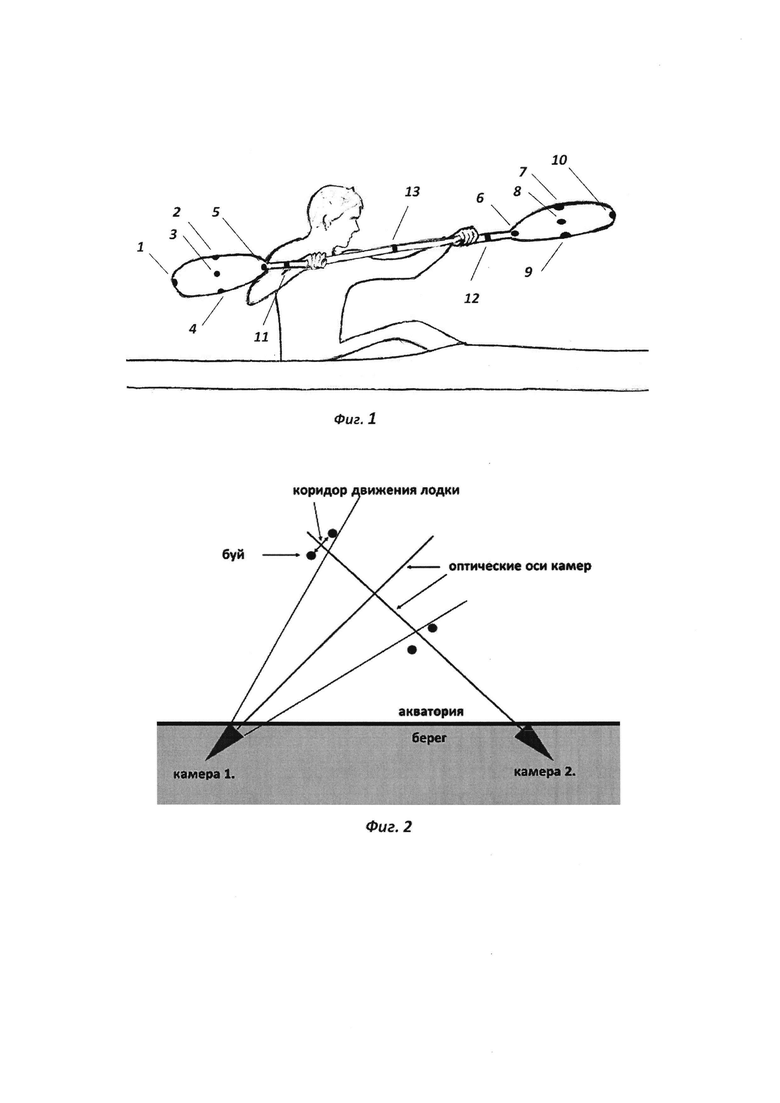
Это достигается креплением к двухлопастному байдарочному веслу светоотражающих меток, служащих для оценки поступательных и вращательных движений весла в трехмерном пространстве (включая вращение вокруг собственной оси). Главное требование к разметке и количеству меток является одновременная видимость хотя бы одной из них при съемке двумя видеокамерами. Разметка весла показана на фиг. 1.
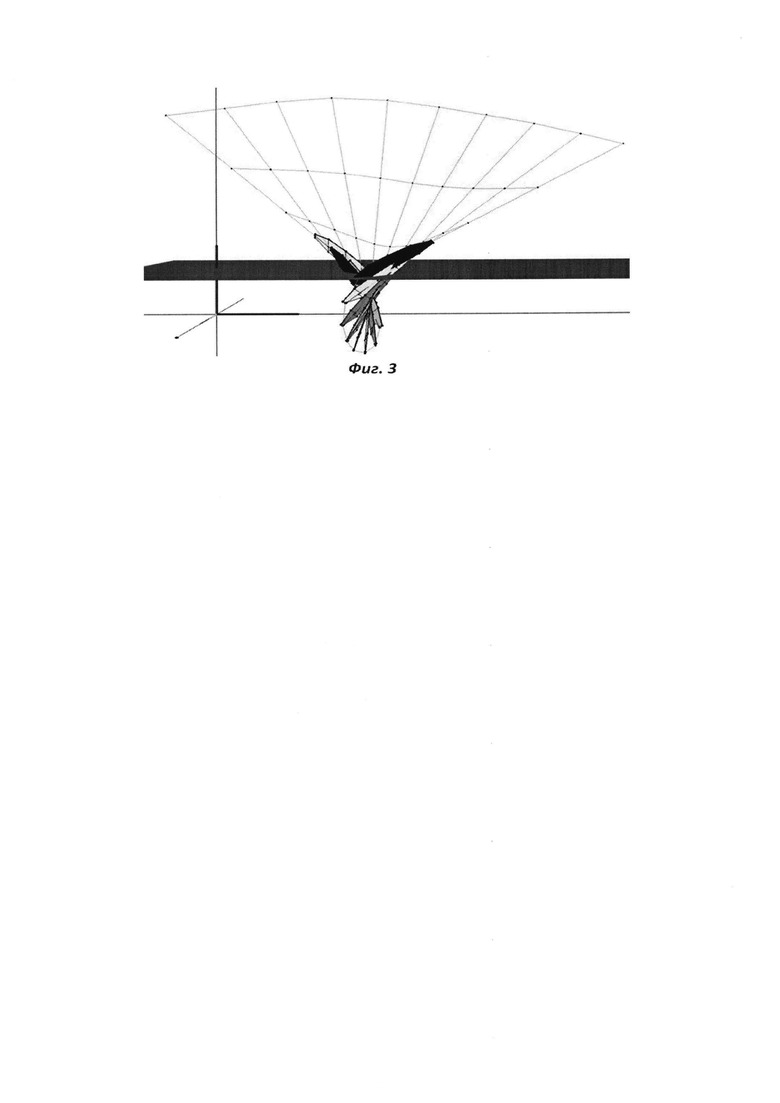
Движение весла фиксируется двумя перпендикулярно ориентированными скоростными камерами с частотой съемки не менее 250 кадров в секунду, оснащенными длиннофокусными объективами для минимизации перспективного искажения. Схема расположения видеокамер и движение лодки во время съемки поясняются на фиг. 2. Оба видеоряда записываются и сохраняются на компьютерном носителе.
Пространственные координаты меток весла определяются инструментально относительно точки отсчета №13 (центр весла). Кроме этого, определяется и фиксируется индивидуальный угол разворота двух лопастей относительно друг друга.
При анализе видеосъемки заранее известные линейные параметры лодки используются как тест-объект с известными линейными характеристиками, позволяющий определить масштаб соответствия размеров изображения на экране в пикселях и реальных линейных размеров. При анализе видеоряда камеры №1 определение масштаба происходит единожды, а при анализе видеоряда камеры №2 - рассчитывается масштаб для каждого кадра, чтобы учесть изменения размеров приближающегося объекта.
Съемка камерой №1 позволяет получить координаты точек №11 и №12 в плоскости Оху, съемка камерой №2 - координаты тех же точек в плоскости Oyz.
Используя момент касания лопастью воды, осуществляется синхронизация двух видеорядов и определяются пространственные координаты точек №11 и №12, а также одной наиболее заметной метки надводной лопасти. В качестве наиболее информативных меток для определения вращения весла вокруг собственной оси, принимаются метки, максимально отставленные от оси древка весла №2, №4 или №7, №9, остальные метки используются как резервные.
Принимая во внимание жесткость конструкции весла и неизменность его линейных размеров и основываясь на заранее известных координатах меток относительно центра весла, методом линейной экстраполяции и поворота осей координатной системы на каждом кадре определяются координаты всех меток погруженной лопасти. При реконструкции траектории движения лопасти под водой учитываются угол разворота лопастей относительно друг друга и угол поворота лопасти вокруг собственной оси.
На основании имеющегося массива пространственных координат точек лопасти для каждого кадра осуществляется визуализация гребка с целью дальнейшей оценки и коррекции техники. Пример реконструкции гребка Мастера спорта международного класса представлен на фиг. 3. Массив пространственных координат также позволяет выявить следующие важные для тренера характеристики: глубину и длину гребка, смещение весла, углы поворота, траекторию движения, скорость движения весла, углы атаки в каждый момент времени, длительность фаз гребка и ритм гребка.
К технико-экономическим преимуществам предлагаемого способа относится то, что нет необходимости крепить к веслу датчики или дополнительные конструкции, а весь анализ строится на бесконтактном оптическом способе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки соревновательной деятельности гребцов на каноэ | 2017 |
|
RU2676449C1 |
| ТРЕНАЖЕР-КАНОЭ | 2011 |
|
RU2461404C1 |
| Устройство для тренировки гребцов | 1987 |
|
SU1416143A1 |
| ШАРНИРНО-СОЧЛЕНЕННОЕ ВЕСЛО | 2004 |
|
RU2279993C2 |
| Установка для тренировки гребцов в бассейне | 1989 |
|
SU1754135A1 |
| Устройство для тренировки гребцов | 1985 |
|
SU1304830A1 |
| Установка для тренировки гребцов | 1990 |
|
SU1803159A1 |
| ВЕСЛО С ЗУБЧАТЫМ СОЕДИНЕНИЕМ РУЧКИ И ДРЕВКА | 2003 |
|
RU2252897C1 |
| УЧЕБНО-ТРЕНИРОВОЧНАЯ ЛОДКА | 2004 |
|
RU2269450C2 |
| Нагрузочный узел устройства для тренировки гребцов | 1986 |
|
SU1391668A1 |
Изобретение относится к области спорта, а именно к способам оценки качества гребковых движений в гребле на байдарках в целях повышения спортивного результата. Способ включает применение двух скоростных видеокамер, которые одновременно фиксируют гребок с двух ракурсов. Дополнительно на лопасти весла наносятся светоотражающие метки, пространственные координаты которых относительно центра весла заранее известны. Видеозаписи, полученные в процессе видеосъемки, обрабатываются с помощью компьютера с целью определения характеристик поступательного и вращательного движения весла. Основываясь на известных размерах используемого весла, путем линейного экстраполирования и поворота координатных осей, определяются пространственные координаты меток скрытой под водой лопасти. Расчет координат лопасти осуществляется для каждого кадра видеоряда с последующей визуализацией гребка в целом. 3 ил.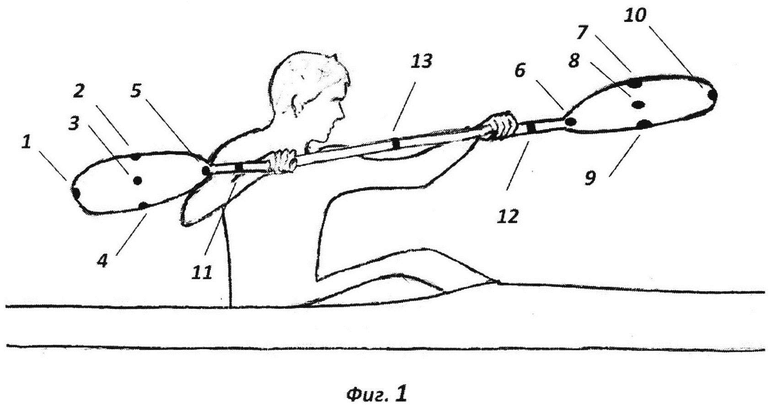
Способ оценки техники гребли на байдарках на основе бесконтактного определения пространственной структуры гребка, включающий применение двух скоростных видеокамер, фиксирующих движения весла, анализ видеозаписей с помощью компьютера, отличающийся тем, что для определения поступательного и вращательного движений весла используют светоотражающие метки на видимой лопасти; учитывая заранее известные линейные размеры весла и пространственные координаты меток относительно центра весла, путем линейного экстраполирования и поворота координатных осей, определяют пространственные координаты меток лопасти, скрытой под водой для каждого кадра видеоряда с последующей визуализацией гребка.
| Устройство для определения механических характеристик грунта | 1983 |
|
SU1106874A1 |
| US 20160199693 A1, 14.07.2016 | |||
| US 20170032693 A1, 02.02.2017. | |||

