Перекрестная ссылка
[0001] Настоящая заявка заявляет приоритет по предварительной заявке на патент США 61/758322, поданной 30 января 2013 года, и предварительной заявке США, 61/768285, поданной 22 февраля 2013 года, которые в полном объеме включены в данный документ посредством ссылки.
Область техники
[0002] Настоящее изобретение, главным образом, относится к способам и устройствам для эксплуатации транспортного средства в различных режимах.
Уровень техники
[0003] Транспортные средства для отдыха, например снегоходы, вездеходы (квадроциклы), внедорожники для развлечений (RUVs) и тому подобные, эксплуатируются в разных условиях и на разных ландшафтах. Транспортные средства используются для занятий спортом, отдыха и в коммунальной сфере. Некоторые водители, управляющие транспортным средством, предпочитают агрессивный стиль вождения, тогда как другие предпочитают более спокойный подход. Расход топлива и уровень шума во время эксплуатации транспортного средства также являются важными факторами. Как правило, такие транспортные средства часто настроены для работы в различных режимах, каждый из которых оптимизирует различные характеристики управляемости для удовлетворения всевозможных предпочтений и потребностей пользователей транспортных средств.
[0004] Независимо от режима эксплуатации, используемого водителем, двигатель часто работает на "холостом ходу", к примеру, при временной остановке транспортного средства. В режиме холостого хода двигатель продолжает работать, однако при этом он не связан функционально с расположенными на земле элементами транспортного средства (колесами или гусеничными лентами, в зависимости от ситуации). Таким образом, транспортное средство не приводится в движение двигателем. Как правило, различные режимы эксплуатации транспортного средства относятся только к активному режиму работы двигателя (то есть режиму, отличному от режима холостого хода). Мощность двигателя адаптирована к различным режимам эксплуатации, за исключением работы в режиме холостого хода. Требуется оптимизация работы в режиме холостого хода двигателя при различных режимах эксплуатации для дополнительного улучшения режима езды.
[0005] Таким образом, существует необходимость в устройствах и способах, обеспечивающих эксплуатацию в различных режимах, как в режиме холостого хода, так и в активном режиме работы двигателя.
Сущность изобретения
[0006] Предметом данного изобретения является преодоление некоторых недостатков, существующих в известном уровне техники.
[0007] В одном аспекте, настоящее изобретение предлагает способы эксплуатации транспортного средства. Транспортное средство содержит двигатель. Способ включает определение запроса на работу двигателя на холостом ходу, и определение текущего режима эксплуатации транспортного средства. Текущий режим эксплуатации представляет собой любой из множества режимов эксплуатации, включая по меньшей мере первый режим и второй режим. Способ включает работу двигателя с первым числом оборотов холостого хода, если текущий режим эксплуатации транспортного средства представляет собой первый режим эксплуатации; и работу двигателя со вторым числом оборотов холостого хода, если текущий режим эксплуатации представляет собой второй режим эксплуатации. Первое число оборотов холостого хода больше, чем второе число оборотов холостого хода.
[0008] В другом аспекте, двигатель соединен с корпусом дроссельной заслонки. Корпус дроссельной заслонки содержит дроссельную заслонку. Дроссельная заслонка перемещается в пределах множества положений дроссельной заслонки. Каждое положение дроссельной заслонки соответствует углу открытия дроссельной заслонки. Работа двигателя с первым числом оборотов холостого хода включает работу двигателя с первым установленным углом опережения зажигания и позиционированием дроссельной заслонки в первом положении дроссельной заслонки. Работа двигателя со вторым числом оборотов холостого хода включает работу двигателя со вторым установленным углом опережения зажигания и позиционированием дроссельной заслонки во втором положении дроссельной заслонки. Первый установленный угол опережения зажигания имеет уменьшенный угол опережения, по сравнению со вторым установленным углом опережения зажигания. Угол открытия дроссельной заслонки, соответствующий первому положению дроссельной заслонки, больше, чем угол открытия дроссельной заслонки, соответствующий второму положению дроссельной заслонки.
[0009] В еще одном аспекте, двигатель функционально связан с бесступенчатой коробкой передач. Бесступенчатая коробка передач имеет число оборотов зацепления. Первое число оборотов холостого хода меньше, чем число оборотов зацепления. Разница между первым числом оборотов холостого хода и числом оборотов зацепления меньше, чем разница между первым числом оборотов холостого хода и вторым числом оборотов холостого хода.
[0010] В дополнительном аспекте, способ также включает определение желаемого режима эксплуатации, при этом желаемый режим эксплуатации может быть любым из множества режимов, включая первый режим и второй режим. Желаемый режим эксплуатации сравнивается с текущим режимом эксплуатации транспортного средства. Если желаемый режим эксплуатации отличается от текущего режима эксплуатации транспортного средства, определяется положение дроссельной заслонки и определяется скорость транспортного средства. Режим эксплуатации транспортного средства изменяется с текущего режима эксплуатации на желаемый режим эксплуатации на основании по меньшей мере частично, положения дроссельной заслонки и скорости транспортного средства.
[0011] В дополнительном аспекте, этап изменения режима эксплуатации включает изменение режима эксплуатации транспортного средства, если выполняется одно из следующих условий: скорость транспортного средства больше, чем пороговое значение скорости транспортного средства; положение дроссельной заслонки меньше, чем нижнее пороговое значение положения дроссельной заслонки; и положение дроссельной заслонки больше, чем верхнее пороговое значение положения дроссельной заслонки.
[0012] В другом аспекте, способ включает информирование водителя транспортного средства об обновлении статуса изменения режима работы.
[0013] В другом аспекте, способ включает продолжение эксплуатации автомобиля в текущем режиме работы, если все последующие условия остаются невыполненными: скорость транспортного средства больше, чем пороговое значение скорости транспортного средства, положение дроссельной заслонки меньше, чем нижнее пороговое значение положения дроссельной заслонки, и положение дроссельной заслонки больше, чем верхнее пороговое значение положения дроссельной заслонки. Режим работы транспортного средства изменяется с текущего режима работы на желаемый режим работы в тот момент, когда выполнено одно из следующих условий: скорость транспортного средства больше, чем пороговое значение скорости транспортного средства; положение дроссельной заслонки меньше, чем нижнее пороговое значение положения дроссельной заслонки; и положение дроссельной заслонки больше, чем верхнее пороговое значение положения дроссельной заслонки.
[0014] В еще одном аспекте, пороговое значение скорости транспортного средства составляет 10 км/ч.
[0015] В дополнительном аспекте, нижнее пороговое значение положения дроссельной заслонки составляет 5% от максимального положения дроссельной заслонки для текущего режима эксплуатации транспортного средства.
[0016] В дополнительном аспекте, верхнее пороговое значение положения дроссельной заслонки составляет 86% от максимального положения дроссельной заслонки для текущего режима эксплуатации транспортного средства.
[0017] В дополнительном аспекте, изменение режима эксплуатации на желаемый режим эксплуатации включает в себя изменение по меньшей мере одного из следующих параметров: максимальной выходной мощности двигателя; максимального положения дроссельной заслонки; и ответной реакции положения дроссельной заслонки, как функции изменения положения механизма привода дроссельной заслонки.
[0018] В другом аспекте, максимальное положение дроссельной заслонки во втором режиме является либо меньшим, либо равным по сравнению с максимальным положением дроссельной заслонки в первом режиме.
[0019] В еще одном аспекте, максимальное положение дроссельной заслонки во втором режиме составляет 50% от максимального положения дроссельной заслонки в первом режиме.
[0020] В дополнительном аспекте, изменение ответной реакции дроссельной заслонки по отношению к положению механизма привода дроссельной заслонки включает модификацию скорости изменения положения дроссельной заслонки, как функции изменения положения механизма привода дроссельной заслонки.
[0021] В дополнительном аспекте, скорость изменения положения дроссельной заслонки, как функции изменения положения механизма привода дроссельной заслонки в первом режиме больше, чем во втором режиме.
[0022] В другом аспекте, множество режимов эксплуатации транспортного средства дополнительно включает третий режим эксплуатации. Максимальное положение дроссельной заслонки во втором режиме является либо меньшим, либо равным максимальному положению дроссельной заслонки в первом режиме. Максимальное положение дроссельной заслонки в третьем режиме меньше, чем максимальное положение дроссельной заслонки во втором режиме.
[0023] В еще одном аспекте, множество режимов эксплуатации транспортного средства дополнительно включает третий режим эксплуатации. Скорость изменения положения дроссельной заслонки, как функции изменения положения механизма привода дроссельной заслонки, в первом режиме больше, чем во втором режиме. Скорость изменения положения дроссельной заслонки, как функции изменения положения механизма привода дроссельной заслонки, во втором режиме больше, чем в третьем режиме.
[0024] В другом аспекте, предложен способ эксплуатации транспортного средства, имеющего двигатель. Способ включает определение текущего режима эксплуатации транспортного средства, при этом текущий режим эксплуатации может быть любым из множества режимов эксплуатации, причем множество режимов эксплуатации включает по меньшей мере первый режим и второй режим. Определяется желаемый режим эксплуатации, при этом желаемый режим эксплуатации может быть любым из множества режимов, включая первый режим и второй режим. Желаемый режим эксплуатации сравнивается с текущим режимом эксплуатации транспортного средства. Если желаемый режим эксплуатации отличается от текущего режима эксплуатации транспортного средства, определяется положение привода дросселя. Режим эксплуатации транспортного средства изменяется с текущего режима эксплуатации на желаемый режим эксплуатации, если положение механизма привода дроссельной заслонки больше, чем нижнее пороговое значение положения механизма привода дроссельной заслонки.
[0025] В другом аспекте, предлагается способ эксплуатации транспортного средства в отношении транспортного средства, имеющего двигатель. Способ включает определение текущего режима эксплуатации транспортного средства, при этом текущий режим эксплуатации может быть любым из множества режимов эксплуатации, причем множество режимов эксплуатации включает по меньшей мере первый режим и второй режим. Определяется желаемый режим эксплуатации, при этом желаемый режим эксплуатации может быть любым из множества режимов, включая первый режим и второй режим. Желаемый режим эксплуатации сравнивается с текущим режимом эксплуатации транспортного средства. Режим эксплуатации транспортного средства изменяется с текущего режима эксплуатации на желаемый режим эксплуатации в том случае, если расположение механизма привода дроссельной заслонки выше, чем расположение, соответствующее неактивному положению дроссельной заслонки.
[0026] В дополнительном аспекте, способ также включает определение первого положения механизма привода дроссельной заслонки перед сравнением желаемого режима эксплуатации с текущим режимом эксплуатации транспортного средства, и определение второго положения привода дроссельной заслонки после сравнения желаемого режима эксплуатации с текущим режимом эксплуатации транспортного средства. Режим эксплуатации транспортного средства изменяется с текущего режима эксплуатации на желаемый режим эксплуатации, если второе положение механизма привода дроссельной заслонки больше, чем первое положение механизма привода дроссельной заслонки.
[0027] В контексте настоящей заявки, термины, связанные с ориентацией в пространстве при ссылке на транспортное средство, и компоненты, связанные с транспортным средством, например, "вперед", "назад", "влево", "вправо", "выше" и "ниже", применяются таким образом, чтобы они были понятны водителю транспортного средства, сориентированного прямо вперед (т.е. не повернутому влево или вправо), в строго вертикальном положении (т.е. без наклона). Приводимые ниже определения имеют приоритет над определениями, которые могут быть предоставлены в документе, включенном здесь в качестве ссылки.
[0028] Каждый из вариантов реализации настоящего изобретения имеет по меньшей мере один из вышеупомянутых объектов и/или аспектов, но не обязательно все из них. Следует понимать, что некоторые аспекты настоящего изобретения, полученные в результате попытки достичь вышеупомянутой цели, могут не удовлетворять этой цели и/или могут удовлетворять другим целям, специально не указанным в данном документе.
[0029] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов реализации настоящего изобретения станут очевидными из последующего описания, приложенных графических материалов, и прилагаемой формулы изобретения.
Краткое описание графических материалов
[0030] Для лучшего понимания настоящего изобретения, а также других аспектов и их дополнительных признаков, создана ссылка на последующее описание, которое должно быть использовано в сочетании с прилагаемыми графическими материалами, где:
[0031] Фиг. 1 представляет собой вид справа на снегоход;
[0032] Фиг. 2А представляет собой схематическое изображение силовой передачи снегохода, проиллюстрированного на фиг. 1;
[0033] Фиг. 2В представляет собой схематическое изображение системы управления дроссельной заслонкой снегохода, проиллюстрированного на фиг. 1;
[0034] Фиг. 3 представляет собой схематическое изображение элементов блока управления двигателем снегохода, проиллюстрированного на фиг. 1;
[0035] Фиг. 4 представляет собой логическую схему, иллюстрирующую способ управления работой двигателя снегохода, проиллюстрированного на фиг. 1, на холостом ходу;
[0036] Фиг. 5 представляет собой логическую схему, иллюстрирующую способ изменения режима эксплуатации снегохода, проиллюстрированного на фиг. 1;
[0037] Фиг. 6А иллюстрирует ответную реакцию дроссельной заслонки в определенном положении механизма привода дроссельной заслонки, в различных режимах эксплуатации снегохода, проиллюстрированного на фиг. 1;
[0038] Фиг. 6В иллюстрирует изменение положения дроссельной заслонки, как функции от времени, при переходе из одного режима эксплуатации в другой режим эксплуатации;
[0039] Фиг. 7А иллюстрирует увеличенный вид в перспективе, полученный с задней правой стороны снегохода, проиллюстрированного на фиг. 1, демонстрирующий его систему безопасности;
[0040] Фиг. 7В иллюстрирует вид сбоку на стандартный ключ и два обучаемых ключа системы безопасности, проиллюстрированной на фиг. 7А;
[0041] Фиг. 8А иллюстрирует ответную реакцию дроссельной заслонки в определенном положении механизма привода дроссельной заслонки, в различных режимах эксплуатации снегохода, проиллюстрированного на фиг. 1, при использовании первого из обучаемых ключей системы безопасности, проиллюстрированной на фиг. 7В;
[0042] Фиг. 8В иллюстрирует ответную реакцию дроссельной заслонки в определенном положении механизма привода дроссельной заслонки, в различных режимах эксплуатации снегохода, проиллюстрированного на фиг. 1, при использовании второго из обучаемых ключей системы безопасности, проиллюстрированной на фиг. 7В;
[0043] Фиг. 9 иллюстрирует три различных соотношения положения дроссельной заслонки, в зависимости от скорости движения снегохода, проиллюстрированного на фиг. 1, эксплуатируемого с использованием трех разных обучаемых ключей и иллюстрирующего ограничения крутящего момента для каждого из обучаемых ключей; и
[0044] Фиг. 10 иллюстрирует схематический вид выбора и установки рабочих параметров для эксплуатации транспортного средства с помощью обучаемых ключей.
Подробное раскрытие изобретения
[0045] Несмотря на то что в данном документе описывается снегоход, следует понимать, что по меньшей мере некоторые аспекты настоящего изобретения также могут быть применены к другим видам транспортных средств, например лодкам, транспортным средствам повышенной проходимости (квадроциклам), мотоциклам, трехколесным моторным транспортным средствам и тому подобным.
[0046] Как показано на фиг. 1, снегоход 10 содержит переднюю часть 12 и заднюю часть 14, которые выполнены в соответствии с направлением движения транспортного средства. Снегоход 10 содержит корпус транспортного средства в виде рамы или шасси 16, включающей задний туннель 18, узел подрамника двигателя 20, и сборный узел передней подвески 22.
[0047] Двигатель 24, который схематически проиллюстрирован на фиг. 1, удерживается с помощью узла подрамника двигателя 20 рамы 16. Двигатель 24 приводит в действие выходной вал двигателя (не показан), который вращается вокруг горизонтальной оси, проходящей, главным образом, перпендикулярно к продольной центральной оси 61 снегохода 10. Топливный бак 25, закрепленный выше туннеля 18, снабжает двигатель 24 топливом для его работы. Блок управления двигателем (ЭБУ) 200 (фиг. 3) функционально связан с двигателем 24, для управления работой двигателя 24, как будет описано ниже.
[0048] Два лыжных шасси 26, расположенных в передней части 12 снегохода 10, прикреплены к сборному узлу передней подвески 22 рамы 16 через передний узел подвески 28. Узел передней подвески 28 содержит лыжные стойки 30, опорные рычаги 32 и шаровые шарниры (не показаны) для функционального соединения с соответствующими лыжными стойками 30, опорными рычагами 32 и рулевой колонкой 34.
[0049] Гусеница бесконечного бортового привода 38 расположена в задней части 14 снегохода 10. Гусеница бортового привода 38, расположенная, в основном, под туннелем 18, функционально соединена с двигателем 24 через систему ременной передачи 40, которая схематически показана пунктирными линиями на фиг. 1. Выходной вал двигателя приводит в действие систему трансмиссии 40 для передачи крутящего момента на бесконечный бортовой привод 38, приводящий в движение снегоход 10. Трансмиссия 40 представляет собой бесступенчатую коробку передач 40, однако, также предполагается использование других видов трансмиссии. Бесконечный бортовой привод 38 приводится в движение вблизи узла задней подвески 42 для передачи поступательного движения снегоходу 10.
[0050] Узел задней подвески 42 содержит пару направляющих салазок 44, имеющих скользящий контакт с бесконечным бортовым приводом 38. Узел задней подвески 42 также содержит один или более амортизаторов 46, который может дополнительно содержать спиральную пружину (не показана), установленную вокруг отдельных амортизаторов 46. Передние и задние рычаги подвески 48 и 50 установлены для соединения направляющих салазок 44 с рамой (шасси) 16. Один или более натяжных колес 52 также установлены в узле задней подвески 42.
[0051] В передней части 12 снегохода 10 обтекатели 54 закрывают двигатель 24 и систему ременной трансмиссии 40, обеспечивая, тем самым, внешнюю оболочку, которая не только защищает двигатель 24 и систему ременной трансмиссии 40, но и выполняет декоративную роль, придавая снегоходу 10 более эстетичный вид. Как правило, обтекатели 54 содержат капот (не показан) и одну или более боковых панелей, которые могут быть открыты, чтобы обеспечить доступ к двигателю 24 и системе ременной трансмиссии 40 при необходимости, например, для осмотра и технического обслуживания двигателя 24 и/или системы ременной трансмиссии 40. Ветровое стекло 56, соединенное с обтекателями 54, выступает в качестве защиты от ветра для уменьшения воздействия потока воздуха на водителя во время движения снегохода 10.
[0052] Сиденье сдвоенного типа 58 расположено над топливным баком 25 и проходит назад от обтекателей 54 к месту размещения водителя снегохода 10. Задняя часть сиденья 58 может содержать отсек для хранения или может быть использована для размещения пассажирского сиденья (не показано). Подножка 60 расположена с каждой стороны снегохода 10, ниже сиденья 58 для размещения ног водителя.
[0053] Верхний конец рулевой колонки 34 соединен с рулевым механизмом, например рулем 36, который расположен перед сиденьем 58. Руль 36 используется для поворота лыжных стоек 30 и, таким образом, лыж 26, обеспечивая управление транспортным средством 10. Механизм привода дроссельной заслонки 37 в виде срабатывающего от пальца рычага дроссельной заслонки 37 установлен на руле 36. Предполагается использование и других типов механизмов привода дроссельной заслонки, например, рычага, приводимого в действие большим пальцем, и вращающейся рукоятки. Рычаг дроссельной заслонки 37 в обычном состоянии находится в положении, удаленном от руля 36, как правило, за счет пружины. Это положение рычага дроссельной заслонки 37 указывает на работу двигателя 24 на холостом ходу, как будет описано ниже. Рычаг дроссельной заслонки 37 может быть прижат к рулю 36 для увеличения потока воздуха, поступающего в двигатель 24, увеличивая, таким образом, выходную мощность двигателя 24 с помощью системы электронного управления (DBW). В заявке на патент США 61/666443, поданной 29 июня 2012 года, полностью включенной в настоящее описание в качестве ссылки, предложены дополнительные детали системы электронного управления дроссельной заслонкой в транспортных средствах. Положение механизма привода дроссельной заслонки ПП определяется, как часть его полностью активированного положения, и, таким образом, изменяется в пределах от 0% (не активированное положение или положение холостого хода) до 100% (полностью активированное положение, когда рычаг дроссельной заслонки 37 находится в ближайшем к рулю 36 положении). Тормозной привод 39 в виде рычага ручного тормоза 46 установлен на левой стороне руля 36 для торможения снегохода 10 известным способом.
[0054] Блок устройства отображения 64 (фиг. 3) установлен в передней части руля 36 для отображения информации, например, скорости транспортного средства, числа оборотов двигателя, режима эксплуатации транспортного средства, температуры и тому подобного, предназначенной водителю снегохода 10. Блок устройства отображения 64, по возможности, содержит один или несколько датчиков, экран дисплея, индикаторные лампы и устройства вывода звука, такие как динамики, аварийные сигналы и тому подобные.
[0055] Переключатель режимов 62 (фиг. 3) установлен вблизи или на руле 36. Переключатель режимов 62 выполнен в виде тумблера, однако предполагается, что это может быть кнопочный переключатель, ручка, рычаг или другой пользовательский элемент управления, встроенный в блок устройства отображения 64 или датчик. Переключатель режимов 62 имеет фиксированные положения, соответствующие экономичному режиму, стандартному режиму и спортивному режиму, как будет более подробно описано ниже. Переключатель режимов 62 может переключаться последовательно, через положения, соответствующие экономичному режиму, стандартному режиму и спортивному режиму. Водитель снегохода 10 указывает на желание изменить режим эксплуатации с текущего режима эксплуатации TP на желаемый режим эксплуатации ЖР снегохода 10 путем перевода переключателя режимов 62 в положение, соответствующее желаемому режиму ЖР. Режим эксплуатации снегохода 10 изменяется с текущего режима работы TP на желаемый режим ЖР в соответствии со способами, описанными более подробно ниже. Предполагается, что количество и названия режимов эксплуатации могут отличаться от описанных в данном документе режимов.
[0056] Снегоход 10 также содержит переключатель отсечки двигателя 216 (фиг. 3 и 7А), соединенный с ЭБУ 200, для отключения двигателя 24. Переключатель отсечки двигателя 216 в виде вытяжного переключателя находится сверху на правой стороне руля 36. Расположение переключателя отсечки двигателя 216 ближе к правой ручке руля 36 позволяет водителю снегохода легко добраться до переключателя отсечки двигателя 216 и задействовать его для отключения двигателя. ЭБУ 200 может прекратить работу двигателя путем отключения подачи напряжения либо к топливному насосу, либо к топливным форсункам, чтобы лишить двигатель 24 топлива, или он может прекратить подачу напряжения к свечам зажигания, чтобы предотвратить сгорание топлива в двигателе 24. Также предполагается, что ЭБУ 200 может использовать два или более из этих методов одновременно, чтобы остановить движение снегохода и/или работу двигателя. Другие способы предотвращения перемещения снегохода 10 могут быть очевидными для специалиста в данной области техники, и любой из этих других методов считается учтенным в пределах объема настоящего изобретения.
[0057] Переключатель запуска 220 (фиг. 3 и 7А) в виде нажимной кнопки расположен на левой стороне руля 36 вблизи тормозного рычага 39. Водитель указывает на желание запустить двигатель 24 путем приведения в действие переключателя запуска 220, т.е. путем нажатия переключателя запуска 220 в положение "ВКЛ". В проиллюстрированном варианте реализации снегохода 10, снегоход 10 имеет стартер (не показан) для запуска двигателя 24. При активации мотор стартера входит в зацепление с маховиком, соединенным с коленчатым валом (не показан) двигателя 24, и, тем самым, проворачивает коленчатый вал для запуска двигателя 24. Предполагается, что стартер может отсутствовать, а с маховиком может быть соединен пусковой трос для проворачивания коленчатого вала и запуска двигателя 24. Таким образом, вместо нажатия кнопки, водитель может потянуть трос для запуска двигателя 24.
[0058] Как показано на фиг 3, 7А и 7В, снегоход 10 снабжен системой безопасности 230, например, системой безопасности Bombardier Recreation Product's Digitally Encoded Security System (DESS™). Система безопасности 230 содержит гнездо для ключа 232 и ключ 234, связанный со шнуром 236, как можно видеть на фиг. 7А. Гнездо для ключа 232 выполнено в виде цилиндра, расположенного в передней части сиденья 58 на правой стороне верхнего конца рулевой колонки 34, под правой частью руля 36. Чашеобразный ключ 234 насаживается на гнездо для ключа 232. Ключ 234 содержит магнит и цифровой кодированный чип, содержащий идентификационную информацию. Шнур 236 предназначен для закрепления с помощью зажима к водителю снегохода 10. Если водитель снегохода покидает снегоход 10, ключ 234, прикрепленный к водителю снегохода на шнуре 236, отсоединится от гнезда для ключа 232. Двигатель 24 и другие системы будут отключены, если ключ системы безопасности 234 будет удален из гнезда для ключа 232. Таким образом, система безопасности 230 также служит в качестве системы безопасности снегохода 10, прекращающей работу снегохода 10, если водитель снегохода отделен от снегохода 10 во время эксплуатации. Таким образом, двигатель 24 и другие системы снегохода могут быть запущены или активированы только в том случае, если ключ 234 присоединен или установлен в гнездо 232 для ключа. Двигатель 24 работает только при установке авторизованного ключа 234 системы безопасности в гнездо 232 для ключа, переключатель 216 отсечки двигателя находится в положении "ОТКЛ" или деактивирован, а переключатель 220 запуска находится в положении "ВКЛ". Система безопасности 230 подробно описана в находящейся на одновременном рассмотрении международной публикации заявки на патент WO 2014/005130, которая в полном объеме включена в настоящее описание посредством ссылки.
[0059] На фиг. 2А схематически проиллюстрирована силовая передача 75 снегохода 10. Силовая передача 75 содержит двигатель 24, бесступенчатую коробку 40 передач и редукторный привод с постоянным отношением 78. Бесступенчатая коробка 40 передач содержит приводной шкив 80, соединенный непосредственно с выходным валом двигателя, и ведомый шкив 88, соединенный с концом поперечно установленного промежуточного вала 92, который удерживается на раме 16 с помощью подшипников. Ремень 86 бесступенчатой коробки передач, расположенный вокруг обоих шкивов 80, 88, передает крутящий момент от ведущего шкива 80 к ведомому шкиву 88. Противоположный конец поперечно установленного промежуточного вала 92 соединен со входным элементом редукторного привода 78, а выходной элемент редукторного привода 78 соединен с ведущим валом 90, на который установлены зубчатые колеса (не показаны), обеспечивающие подвижное соединение с бортовым приводом 38.
[0060] В этом конкретном варианте реализации изобретения, приводной шкив 80 вращается с тем же числом оборотов ОД, что и выходной вал двигателя 24, поскольку скорость вращения поперечного промежуточного вала 92 определена в соответствии с текущим передаточным отношением бесступенчатой коробки 40 передач. Ведущий вал 90 вращается с более низкой скоростью, чем поперечный промежуточный вал 92, из-за действия редукторного привода 78. Следует понимать, что ведомый шкив 88 может быть соединен с валом, без использования промежуточного вала 92, например, непосредственно с ведущим валом 90 или любым другим валом, функционально соединенным с элементом транспортного средства 10, расположенным на земле (т.е. бортовым приводом 38, в случае снегохода 10, проиллюстрированного в данном документе).
[0061] Каждый из шкивов 80, 88 содержит подвижный блок 84, 89, который может перемещаться в осевом направлении относительно неподвижного блока 82, 87, для изменения эффективного диаметра соответствующего шкива 80, 88. Блоки 82, 84 приводных шкивов смещены по отношению друг к другу, чтобы при остановке блоки 82, 84 приводных шкивов находились на большом расстоянии и ремень 86 высвобождался из зацепления с приводным шкивом 80. Подвижный блок 84 перемещается в ответ на изменение числа оборотов двигателя ОД. Эффективные диаметры шкивов 80, 88 находятся в обратной взаимосвязи. В проиллюстрированном варианте реализации изобретения, бесступенчатая коробка 40 передач является чисто механической коробкой 40 передач, в которой эффективный диаметр приводного шкива 80 зависит только от числа оборотов двигателя ОД. Как только выходной вал двигателя и блоки 82, 84 приводных шкивов начинают вращаться с увеличивающейся частотой вращения ОД, расстояние между блоками 82, 84 приводных шкивов уменьшается, из-за воздействия набора центробежных грузов, прижимающих подвижный блок 84 по направлению к неподвижному блоку 82. При определенном числе оборотов двигателя ОД блоки 82, 84 приводных шкивов вступают в контакт с ремнем 86, который, в свою очередь, начинает вращать блоки 87, 89 приводных шкивов. Число оборотов ОД (выходного вала двигателя и блоков 82, 84 приводных шкивов), при котором блоки 82, 84 приводных шкивов входят в зацепление с ремнем 86, называют числом оборотов зацепления ОДзацепления. Также предполагается, что бесступенчатая коробка 40 передач может быть вспомогательной коробкой передач, имеющей гидравлическую, пневматическую или другую систему для управления эффективным диаметром шкива 80 или 88, и, таким образом, числом оборотов зацепления ОДзацепления коробки 40 передач.
[0062] При числе оборотов ОД, большем, чем число оборотов зацепления ОДзацепления, двигатель 24 является функционально соединенным через бесступенчатую коробку 40 передач с бортовым приводом 38. При числе оборотов ОД, меньшем, чем число оборотов зацепления ОДзацепления, коробка 40 передач не входит в зацепление и, таким образом, силовая передача 75 не может передавать крутящий момент и мощность от двигателя 24 к бортовому приводу 38. Таким образом, снегоход 10 не приводится в действие двигателем 24, и двигатель 24 работает на холостом ходу при числе оборотов двигателя ОД, меньшем, чем число оборотов зацепления ОДзацепления. Работа двигателя 24 на холостом ходу обеспечивает питанием системы транспортного средства, например, дисплеи 64, ЭБУ 200, и тому подобные. Двигатель 24 может быть переведен в режим работы на холостом ходу путем высвобождения рычага дроссельной заслонки 37 без остановки двигателя 24. Как правило, двигатель 24 заводится и отключается путем установки ключа (механического и/или электронного) в гнездо для ключа или путем использования переключателя включения/выключения.
[0063] Двигатель 24 представляет собой рядный, двухцилиндровый, четырехтактный двигатель внутреннего сгорания. Тем не менее предполагается, что конструкция двигателя 24 может представлять собой любую известную конструкцию. Двигатель 24 получает топливо из топливного бака 25 через систему впрыска топлива 76 (фиг. 3). Двигатель 24 получает воздух из системы впуска воздуха 66 (фиг. 2В) через корпус дроссельной заслонки 68. Топливо-воздушная смесь в двигателе 24 воспламеняется системой зажигания 74. Выходная мощность двигателя Р, крутящий момент τ, и число оборотов двигателя ОД частично обусловлены топливо-воздушной смесью в двигателе 24 и установкой угла опережения зажигания УОЗ. Блок управления двигателем (ЭБУ) 200 функционально соединен с двигателем 24 для управления работой двигателя 24, как будет описано ниже.
[0064] Как показано на фиг. 2В, корпус дроссельной заслонки 68 содержит дроссельную заслонку 70, которая регулирует количество воздуха, проходящего через корпус дроссельной заслонки 68 в двигатель 24. Дроссельная заслонка 70 представляет собой поворотную заслонку, содержащую круглый диск, закрепленный внутри полого корпуса дроссельной заслонки 68, вращающийся вокруг штока, проходящего сквозь поперечину диска. Прохождение воздуха через полый корпус дроссельной заслонки 68 может быть ограничено различным объемом, за счет вращения диска вокруг штока. Дроссельная заслонка 70 находится в полностью открытом положении (минимальное ограничение воздушного потока), когда круглая поверхность диска находится на своем минимальном угле отклонения по отношению к центральной оси полого корпуса дроссельной заслонки 68, и в полностью закрытом положении (максимальное ограничение воздушного потока), когда круглая поверхность диска находится на своем максимальном угле отклонения по отношению к центральной оси полого корпуса дроссельной заслонки 68. Привод дроссельной заслонки 72, в виде электродвигателя, функционально соединен с дроссельной заслонки для изменения положение дроссельной заслонки и, тем самым, регулировки открытия дроссельной заслонки 70. Положение дроссельной заслонки ПДЗ может быть определено в терминах степени открытия дроссельной заслонки 70, выраженной в процентах. Положение дроссельной заслонки ПДЗ определяется как часть, от его полностью открытого положения, и, таким образом, изменяется от 0% (полностью закрыта) до 100% (полностью открыта). Датчик положения дроссельной заслонки 206 соединен с дроссельной заслонкой 70 для определения положения дроссельной заслонки ПДЗ. Привод дроссельной заслонки 72 позиционирует дроссельную заслонку 70 на основании по меньшей мере частично, положения ПП рычага дроссельной заслонки 37 снегохода 10. Как упоминалось выше, снегоход 10 имеет систему электронного управления (DBW), в которой дроссельная заслонка 70 управляется электронным путем, вместо механической связи между рычагом дроссельной заслонки 37 и дроссельной заслонкой 70. Положение ПП рычага дроссельной заслонки 37 контролируется с помощью датчика положения механизма привода дроссельной заслонки 204. Управление приводом 72 частично основано на сигналах, получаемых от ЭБУ 200, как описано ниже.
[0065] Как показано на фиг. 2В и 3, ЭБУ 200 связан электронным способом с различными датчиками, от которых он принимает сигналы. ЭБУ 200 использует эти сигналы для управления работой привода дроссельной заслонки 72, системы зажигания 74, и системы впрыска топлива 76, в случае двигателя с впрыском топлива, для управления двигателем 24. Способы, с помощью которых ЭБУ 200 управляет двигателем 24, будут описаны более подробно ниже.
[0066] Как будет понятно специалистам в данной области техники, не каждый датчик или компонент, проиллюстрированный на фиг. 3, необходим для достижения аспектов настоящего изобретения. Как, также будет понятно специалистам в данной области техники, в зависимости от конкретного аспекта настоящего изобретения, некоторые из датчиков и компонентов могут отсутствовать, некоторые из датчиков и компонентов могут быть заменены другими типами датчиков и компонентов, а два или более датчиков могут быть объединены в единый датчик, который можно использовать для выполнения нескольких функций без отступления от сущности и объема настоящего изобретения.
[0067] Датчик положения механизма привода дроссельной заслонки 204 определяет положение ПП механизма привода дроссельной заслонки 37 (задействованного пальцем или большим пальцем рычага дроссельной заслонки 37, в проиллюстрированном варианте реализации снегохода 10) и посылает сигнал, представляющий собой положение дроссельной заслонки ПП, в ЭБУ 200. В зависимости от типа механизма привода дроссельной заслонки, датчик положения механизма привода дроссельной заслонки 204, как правило, расположен в непосредственной близости от механизма привода дроссельной заслонки 37 и определяет перемещение механизма привода дроссельной заслонки 37 или линейное перемещение троса, соединенного с механизмом привода дроссельной заслонки 37.
[0068] ЭБУ 200 передает сигнал на привод дроссельной заслонки 72 для регулировки положения ПДЗ, и, тем самым, открытия дроссельной заслонки 70 внутри корпуса дроссельной заслонки 68. Положение дроссельной заслонки ПДЗ частично регулируется на основании положения механизма привода дроссельной заслонки ПП, а также других факторов, например, установки угла опережения зажигания УОЗ, требуемой выходной мощности Р и крутящего момента τ, текущего режима эксплуатации TP, и тому подобных.
[0069] Датчик положения дроссельной заслонки 206 определяет положение (т.е. угол открытия) дроссельной заслонки 70 и направляет сигнал, представляющий собой положение ПДЗ дроссельной заслонки 70, в ЭБУ 200. Датчик положения дроссельной заслонки 206 действует как обратная связь с ЭБУ 200, так как ЭБУ 200 использует сигнал, полученный от датчика положения дроссельной заслонки 206, для определения того, переместил ли привод 72 дроссельной заслонки дроссельную заслонку 70 в требуемое положение, и выполнена ли соответствующая регулировка. В качестве датчика положения дроссельной заслонки 206 может быть использован любой подходящий тип датчика, например, реостат, датчик Холла, потенциометр, и тому подобный. В зависимости от типа используемого привода 72 дроссельной заслонки отдельный датчик положения дроссельной заслонки 206 может не потребоваться. Например, отдельный датчик положения дроссельной заслонки 206 не требуется, если привод 72 дроссельной заслонки представляет собой серводвигатель, так как серводвигатель содержит свою собственную цепь обратной связи, которая корректирует положение двигателя и, таким образом, имеет встроенный датчик положения дроссельной заслонки 206.
[0070] Датчик числа оборотов двигателя 208 определяет число оборотов ОД двигателя 24 и направляет сигнал, представляющий собой число оборотов ОД двигателя 24, в ЭБУ 200. Датчик числа оборотов двигателя 208 представляет собой датчик Холла, соединенный с зубчатым колесом на выходном валу двигателя. Предполагается, что датчик числа оборотов двигателя 202 может быть соединен с любым вращающимся валом двигателя 24, например, с коленчатым валом. Число оборотов ОД двигателя 24 может быть использовано ЭБУ 200 для расчета крутящего момента τ и выходной мощности Р двигателя 24.
[0071] Датчик переключателя режимов 210 определяет положение или перемещение переключателя режимов 62 и направляет сигнал в ЭБУ 200, указывающий на желаемый режим эксплуатации ЖР. В некоторых вариантах реализации изобретения, датчик переключателя режимов 210 выполнен с возможностью определения положения переключателя режимов 62, а ЭБУ 200 определяет соответствующий желаемый режим эксплуатации ЖР по сигналу, полученному от датчика переключателя режимов 210. В некоторых вариантах реализации изобретения, датчик переключателя режимов 210 выполнен с возможностью определения перемещения переключателя режимов 62, в том числе количества шагов перемещения (одного или двух шагов в проиллюстрированном варианте) и направления перемещения ("вверх" или "вниз"). Датчик переключателя режимов 210 отправляет сигнал в ЭБУ 200, указывающий на перемещение, а ЭБУ 200 определяет желаемый режим эксплуатации ЖР на основании текущего режима эксплуатации TP и информации, полученной о перемещении переключателя режимов 62.
[0072] Датчик скорости транспортного средства 202 определяет скорость СТС снегохода 10 и посылает сигнал, характеризующий скорость СТС снегохода 10, в блок 64. Предполагается, что датчик скорости транспортного средства 202 может также послать сигнал, характеризующий скорость СТС снегохода 10 в ЭБУ 200. Датчик скорости транспортного средства 202 представляет собой датчик Холла, соединенный с зубчатым колесом на приводном валу, например, на ведущем валу 90 или промежуточном валу 92, для определения частоты их вращения. Предполагается, что датчик скорости транспортного средства 202 может определить скорость любого вала, приводимого в движение ведомым валом 88 (т.е. любого вала, соединяющего ведомый вал 88 и бортовой привод 38), в том числе валов внутри редукторного привода 78, для определения скорости снегохода 10. Предполагается, что может быть использован любой подходящий тип датчика скорости транспортного средства 202. Кроме того, датчик скорости транспортного средства 202 может содержать систему глобального позиционирования (блок GPS). При использовании информации из блока GPS, скорость транспортного средства 10 может быть определена путем расчета изменения положения транспортного средства 10 в течение определенного периода времени, который обычно зависит от блока GPS.
[0073] ЭБУ 200 подключен к системе зажигания 74 для управления воспламенением топливо-воздушной смеси в камере сгорания двигателя 24. Например, ЭБУ 200 частично управляет установкой угла опережения зажигания УОЗ, на основании положения дроссельной заслонки ПДЗ, положения механизма привода дроссельной заслонки ПП, и/или числа оборотов двигателя ОД. ЭБУ 200 также подключен к системе впрыска топлива 76, для управления впрыском топлива в двигатель 24.
[0074] ЭБУ 200 подключен к блоку устройства отображения 64 для управления выводимой на него информацией. ЭБУ 200 передает сигналы в блок устройства отображения 64 для вывода информации относительно числа оборотов двигателя и скорости транспортного средства, а также выбора режимов.
[0075] ЭБУ 200 соединен с переключателем отсечки двигателя 216 для определения необходимости остановки работы двигателя.
[0076] ЭБУ 200 соединен с переключателем запуска 220 для определения момента, когда водитель желает запустить работу двигателя 24.
[0077] ЭБУ 200 подключен к системе безопасности 230 для проверки того, что водитель авторизован на управление снегоходом 10, остановки транспортного средства и/или работы двигателя в аварийной ситуации. Как будет описано ниже, ЭБУ 200 может также получать информацию для работы снегохода 10 от системы безопасности.
[0078] Предполагается, что ЭБУ 200 может быть разделен на несколько блоков, каждый из которых выполняет одну или более функций, описанных выше и, кроме того, описанных ниже.
[0079] ЭБУ 200 управляет работой двигателя 24 на основании по меньшей мере частично, сигналов, получаемых от датчиков 202, 204, 206, 208, 210, и в зависимости от конкретной схемы управления или карты, используемой в ECU 200. Карты управления предоставляют информацию, связанную с различными параметрами (например, положение дроссельной заслонки, положение механизма привода дроссельной заслонки, впрыска топлива, установки угла опережения зажигания, крутящего момента двигателя, выходной мощности и так далее), необходимыми для работы двигателя 24. Например, карта управления представляет информацию о различных вариантах положений дроссельной заслонки и оборотов двигателя для достижения определенной выходной мощности или крутящего момента двигателя. ЭБУ 200 может также использовать алгоритмы, дополнительно к картам управления, для определения некоторых параметров.
[0080] Снегоход 10 может работать в различных режимах эксплуатации (спортивный, стандартный и экономный, в проиллюстрированном варианте реализации изобретения), как упоминалось выше. Некоторые из карт управления, используемых в ЭБУ 200, являются специфическими для каждого режима эксплуатации и задают различные параметры двигателя для работы в этом режиме.
[0081] Ссылаясь на фиг. 6А, можно увидеть, что ответная реакция дроссельной заслонки (т.е. положение дроссельной заслонки ПДЗ, как функции изменения положения механизма привода дроссельной заслонки ПП) различна для разных режимов. Как упоминалось выше, положение дроссельной заслонки ПДЗ определяется как часть от ее полностью открытого положения и, таким образом, изменяется в диапазоне от 0% (полностью закрыта) до 100% (полностью открыта). Положение механизма привода дроссельной заслонки ПП также определяется как часть ее полностью задействованного положения и, таким образом, изменяется в диапазоне от 0% (не задействована) до 100% (полностью задействована).
[0082] Так как положение механизма привода дроссельной заслонки ПП увеличивается от 0% до 100%, соответствующее положение дроссельной заслонки ПДЗ для каждого режима увеличивается от минимального значения для данного режима до максимального значения для данного режима. Минимальное положение дроссельной заслонки ПДЗ, соответствующее 0% положения механизма привода дроссельной заслонки ПП, больше нуля для всех трех режимов. Предполагается, что положение дроссельной заслонки ПДЗ, соответствующее 0% положения механизма привода дроссельной заслонки ПП, равно нулю для всех трех режимов. Минимальное положение дроссельной заслонки ПДЗ соответствует положению дроссельной заслонки на холостом ходу ПДЗХХ для данного режима и установлено значение, большее чем нуль, для обеспечения работы на холостом ходу в данном режиме, как будет описано ниже.
[0083] Как видно, для любого заданного положения механизма привода дроссельной заслонки ПП, соответствующее положение дроссельной заслонки ПДЗ экономичного режима меньше, чем соответствующее положение дроссельной заслонки ПДЗ для спортивного и стандартного режима. Кроме того, для любого заданного положения механизма привода дроссельной заслонки ПП, за исключением 100%, положение дроссельной заслонки ПДЗ спортивного режима больше, чем соответствующее положение дроссельной заслонки ПДЗ для стандартного режима. При положении механизма дроссельной заслонки ПП, равном 100%, положения дроссельной заслонки ПДЗ в спортивном и стандартном режиме одинаковы.
[0084] В проиллюстрированном варианте реализации изобретения, максимальное положение дроссельной заслонки ПДЗ в спортивном и стандартном режиме устанавливается в полностью открытое положение (т.е. равное 100%), в то время как в экономичном режиме, максимальное положение дроссельной заслонки ПДЗ ограничено 50% от ее полностью открытого положения. Предполагается, что максимальное положение дроссельной заслонки ПДЗ стандартного режима может быть меньше, чем в спортивном режиме, таким образом, каждый из трех режимов имеет различное максимальное положение дроссельной заслонки ПДЗ. Также предполагается, что максимальное положение дроссельной заслонки ПДЗ стандартного режима может быть таким же, как и в экономичном режиме. В проиллюстрированном варианте реализации изобретения, для каждого из трех режимов, максимальное положение дроссельной заслонки ПДЗ достигается, когда педаль дроссельной заслонки 37 расположена в максимальном положении привода дроссельной заслонки ПП, равном 100%. Предполагается, что максимальное положение дроссельной заслонки ПДЗ может быть достигнуто при положении механизма привода дроссельной заслонки, меньшем чем 100%.
[0085] Двигатель 24 снегохода 10 способен передавать определенную максимальную выходную мощность на основании его производительности, как будет понятно квалифицированному специалисту в данной области техники. Мощность Р, передаваемая двигателем 24 в любой заданный момент времени, зависит, помимо других параметров, от положения дроссельной заслонки ПДЗ, установки угла опережения зажигания УОЗ и впрыска топлива. ЭБУ 200 управляет работой двигателя 24 таким образом, что выходная мощность Р, передаваемая двигателем 24, также зависит от текущего режима эксплуатации ТР. Например, в экономичном режиме, выходная мощность Р, передаваемая двигателем 24, ограничена максимальным значением, то есть приблизительно 50% от максимальной выходной мощности, доступной для двигателя 24.
[0086] Кроме того, работа двигателя 24 на холостом ходу также управляется на основании текущего режима работы TP двигателя 24. Двигатель 24 работает на оборотах холостого хода двигателя ОХХ, которые отличаются для разных режимов. Положение дроссельной заслонки на холостом ходу ПДЗХХ и установка угла опережения зажигания холостого хода УОЗХХ также имеют разные значения в различных режимах для получения различных характеристик зацепления коробки передач в каждом режиме.
[0087] Число оборотов двигателя на холостом ходу ОХХ частично определяет время отклика при переходе от работы на холостом ходу (ОХХ<ОДзацепления и ПП=0%) к работе в активном режиме (ОД>ОДзацепления и ПП>0%). Ответная реакция дроссельной заслонки определяется как время, прошедшее между моментом, когда рычаг дроссельной заслонки 37 приведен в действие (увеличение значения от ПП = 0), и моментом, когда бесступенчатая коробка 40 передач входит в зацепление, таким образом, соединяя двигатель 24 с бесконечными бортовыми приводами 38. Число оборотов двигателя на холостом ходу в спортивном, стандартном и экономичном режиме, обозначенных соответственно ОХХСПОРТ, ОХХСТД и ОХХЭКО, установлено таким образом, чтобы обеспечить необходимое время отклика для данного режима эксплуатации. Например, меньше время отклика требуется в спортивном режиме, по сравнению со стандартным и экономичным режимом эксплуатации, при аналогичном задействовании рычага дроссельной заслонки 37 из положения рычага дроссельной заслонки ПП=0% в положение рычага дроссельной заслонки ПП>0%.
[0088] В целом, время отклика меньше для оборотов холостого хода двигателя ОХХ, близких к оборотам зацепления ОДзацепления. В связи с этим, обороты холостого хода двигателя ОХХСПОРТ спортивного режима устанавливаются ближе (относительно ОХХСТД и ОХХЭКО) к оборотам зацепления ОДзацепления для того, чтобы при малейшем перемещении рычага дроссельной заслонки 37 обеспечить зацепление коробки 40 передач, предоставляя водителю снегохода 10 ощущение "спортивности" или высокой производительности.
[0089] Заданные обороты холостого хода двигателя ОХХ могут быть получены путем различных комбинаций положения дроссельной заслонки на холостом ходу ПДЗХХ и установки угла опережения зажигания на холостом ходу УОЗХХ. В целом, число оборотов двигателя ОД может быть увеличено, как за счет опережения угла зажигания УОЗ, так и за счет увеличения положения дроссельной заслонки ПДЗ.
[0090] Ответная реакция дроссельной заслонки, при переходе от работы на холостом ходу в активный режим эксплуатации, также зависит от положения дроссельной заслонки на холостом ходу ПДЗХХ и от установки угла опережения зажигания УОЗ, выбранных для получения заданного числа оборотов двигателя на холостом ходу ОХХ, так как, эти параметры по разному оказывают влияние на ответную реакцию дроссельной заслонки. Установка угла опережения зажигания УОЗ и положение дроссельной заслонки ПДЗ по отдельности могут быть изменены очень быстро. Тем не менее скорость изменения оборотов двигателя ОД, в ответ на изменение установки момента зажигания, намного больше, чем в ответ на изменение положения дроссельной заслонки ПДЗ, из-за большого объема воздуха в системе впрыска снегохода 10. В целом, эффект влияния изменения ПДЗ на обороты двигателя ОД меньше для большего объема воздуха в системе впрыска. Поэтому изменение оборотов двигателя ОД может быть получено гораздо быстрее, за счет изменения установки угла опережения зажигания УОЗ, чем за счет изменения положения дроссельной заслонки ПДЗ.
[0091] Переход от работы на холостом ходу к активному режиму работы включает увеличение числа оборотов двигателя ОД от значения числа оборотов на холостом ходу ОХХ, меньшего, чем число оборотов зацепления ОДзацепления, к окончательному значению, которое немного больше, чем число оборотов зацепления ОДзацепления. Это увеличение числа оборотов двигателя ОД может быть получено за значительно более короткое время отклика путем увеличения угла опережения зажигания УОЗ, чем за счет увеличения положения дроссельной заслонки ПДЗ. Кроме того, ответная реакция дроссельной заслонки может быть дополнительно минимизирована путем уменьшения регулировки положения дроссельной заслонки ПДЗ, необходимого для перехода из режима работы на холостом ходу к активному режиму эксплуатации. Регулировка дроссельной заслонки 70 минимизируется путем выбора положения дроссельной заслонки на холостом ходу ПДЗХХ, которое приблизительно равно положению дроссельной заслонки ПДЗ, обеспечивающему число оборотов двигателя ОД для активного режима работы в заданном режиме эксплуатации.
[0092] В связи с этим, чтобы сократить время отклика в спортивном режиме, по сравнению со временем отклика в стандартном режиме, положение дроссельной заслонки на холостом ходу в спортивном режиме ПДЗХХСПОРТ увеличено по сравнению с положением дроссельной заслонки на холостом ходу в стандартном режиме ПДЗХХСТД, а угол опережения зажигания на холостом ходу в спортивном режиме УОЗХХСПОРТ уменьшен, по сравнению с углом опережения зажигания на холостом ходу в стандартном режиме УОЗХХстд. Уменьшение угла опережения зажигания на холостом ходу в спортивном режиме УОЗХХСПОРТ позволяет обеспечить работу двигателя 24 на холостом ходу (т.е. число оборотов двигателя на холостом ходу меньше, чем число оборотов зацепления ОХХ<ОДзацепления), несмотря на увеличенное положение дроссельной заслонки на холостом ходу в спортивном режиме ПДЗХХСПОРТ. Такое регулирование положения дроссельной заслонки на холостом ходу в спортивном режиме ПДЗХХСПОРТ и угла опережения зажигания на холостом ходу в спортивном режиме УОЗХХСПОРТ, также дает желаемый эффект снижения времени отклика в спортивном режиме.
[0093] Обороты холостого хода в экономичном режиме ОХХЭКО меньше, чем обороты двигателя на холостом ходу в стандартном режиме ОХХСТД. Положение дроссельной заслонки на холостом ходу в экономичном режиме ПДЗХХЭКО меньше, чем положение дроссельной заслонки на холостом ходу в стандартном режиме ПДЗХХСТД, а угол опережения зажигания на холостом ходу в экономичном режиме увеличен, по сравнению с углом опережения зажигания на холостом ходу в стандартном режиме УОЗХХСТД. Предполагается, что в режиме угол опережения зажигания на холостом ходу УОЗХХ имеет одинаковое значение в стандартном и экономичном режиме. Предполагается, что число оборотов двигателя на холостом ходу ОХХ, положение дроссельной заслонки на холостом ходу ПДЗХХ, и угол опережения зажигания на холостом ходу УОЗХХ имеют одни и те же значения в стандартном и экономичном режиме. Также предполагается, что положение дроссельной заслонки на холостом ходу ПДЗХХ может иметь одинаковое значение во всех трех режимах, и что различное число оборотов двигателя на холостом ходу может быть получено путем соответствующей регулировки угла опережения зажигания на холостом ходу.
[0094] Со ссылкой на фиг. 4 будет описан способ 400, с помощью которого ЭБУ 200 управляет работой двигателя 24 на холостом ходу.
[0095] Способ 400 начинается на этапе 405 после запуска двигателя 24, как правило, путем установки и/или подключения электронного и/или механического ключа и нажатия кнопки запуска. На этапе 410, способ 400 определяет, следует ли двигателю 24 работать на холостом ходу. В настоящем варианте реализации изобретения, ЭБУ определяет, следует ли двигателю 24 работать на холостом ходу на основании положения ПП рычага дроссельной заслонки 37. ЭБУ 200 также предполагает, что двигатель 24 должен работать в режиме холостого хода при начальном запуске, так снегоход 10, согласно настоящему варианту реализации изобретения, имеет защиту от запуска в том случае, когда рычаг дроссельной заслонки 37 не находится в положении "холостого хода", максимально удаленного от руля 36, т.е. снегоход 10 не будет запущен при нажатом рычаге дроссельной заслонки 37. Таким образом, в проиллюстрированном варианте реализации способа 400, ЭБУ 200 определяет, что двигатель 24 работает на холостом ходу при начальном запуске снегохода 10, или в период времени после запуска, если положение механизма привода дроссельной заслонки ПП установлено в нулевое значение.
[0096] Если ЭБУ 200 определяет, что работа двигателя 24 на холостом ходу не требуется, способ 400 переходит к выполнению этапа 490, продолжая активный режим работы (т.е. работа не на холостом ходу) двигателя 24. В активном режиме или в режиме работы двигателя 24 не на холостом ходу, рабочие параметры двигателя 24, в том числе такие параметры, как выходная мощность, ответная реакция дроссельной заслонки, и угол опережения зажигания, управляются на основании получения информации о действии пользователя, управляющего рычагом дроссельной заслонки 37, переключателя режимов 62 и так далее, и алгоритмов и/или карт управления для текущего режима эксплуатации ТР.
[0097] Если на этапе 410 ЭБУ 200 определяет, что двигателю 24 следует работать в режиме холостого хода, способ 400 переходит к этапу 420, где ЭБУ 200 определяет текущий режим эксплуатации TP на основе сигнала, полученного от датчика переключателя режимов 210, как описано выше.
[0098] Если текущий режим работы TP определен, как спортивный режим, на этапе 430, на этапе 440 ЭБУ 200 устанавливает положение дроссельной заслонки ПДЗ в положение ПДЗХХСПОРТ и угол опережения зажигания УОЗ в положение УОЗХХСПОРТ для работы на холостом ходу в спортивном режиме. Затем способ переходит к этапу 480.
[0099] Если на этапе 430 текущий режим TP не является спортивным режимом, способ 400 переходит к этапу 450 для определения того, является ли текущий режим эксплуатации TP стандартным режимом. Если на этапе 450 текущий режим TP, определенный на этапе 450, является стандартным режимом, то на этапе 460 положение дроссельной заслонки ПДЗ устанавливается в положение ПДЗХХСТД и угол опережения зажигания УОЗ устанавливается в положение УОЗХХСТД для работы на холостом ходу в стандартном режиме. Затем способ переходит к этапу 480.
[00100] Текущий режим TP определяется как экономный режим, если на этапе 450 определено, что TP не является стандартным режимом. Затем, способ 400 переходит к этапу 470, где ЭБУ 200 устанавливает положение дроссельной заслонки ПДЗ в положение ПДЗХХЭКО, и угол опережения зажигания УОЗ устанавливается в положение УОЗХХЭКО, для работы на холостом ходу в экономичном режиме. Затем способ переходит к этапу 480.
[00101] Следует понимать, что этап 430 может быть выполнен параллельно с этапом 450 или этапом 430, а этап 450 может быть выполнен в обратном порядке, чем порядок, проиллюстрированный на фиг. 4. Следует понимать, что ЭБУ 200 может, в качестве альтернативы, определять, является ли текущий режим TP стандартным режимом или экономичным режимом, и если текущий режим не является ни тем, ни другим, то сделать вывод, что текущий режим TP является спортивным режимом. Аналогично, ЭБУ 200 может, в качестве альтернативы, определять, является ли текущий режим TP спортивным режимом или экономичным режимом, и если текущий режим не является ни тем, ни другим, то сделать вывод, что текущий режим TP является стандартным режимом. Способ 400 также может иметь отдельный этап для определения текущего режима TP, а затем, соответственно, переходить к одному из этапов 440, 460 и 470, прежде чем перейти к этапу 480.
[00102] На этапе 480, ЭБУ 200 определяет, должна ли продолжаться работа двигателя 24 на холостом ходу. ЭБУ 200 определяет, что работа двигателя 24 на холостом ходу должна быть прекращена, если рычаг дроссельной заслонки 37 устанавливает механизм привода дроссельной заслонки ПП в положение, отличное от нуля. Если работа двигателя 24 на холостом ходу должна быть прекращена, способ 400 переходит к этапу 490 для инициализации активного режима эксплуатации транспортного средства 10, где рабочие параметры двигателя 24 основаны на действиях пользователя и картах управления и/или алгоритмов, описанных выше. Если на этапе 480 определено, что работа двигателя на холостом ходу должна продолжаться, способ 400 переходит к этапу 485 для ожидания предварительно заданного периода времени Δt перед повторным возвращением к этапу 420 для определения текущего режима эксплуатации ТР.
[00103] Со ссылкой на фиг. 5, будет описан способ 500 для изменения режима эксплуатации снегохода 10.
[00104] Способ 500 начинается на этапе 505, где ЭБУ 200 управляет работой снегохода 10 в текущем режиме ТР. На этапе 510 ЭБУ 200 определяет желаемый режим работы ЖР на основании сигнала(ов), полученных от датчика переключателя режимов 210.
[00105] На этапе 520 ЭБУ 200 сравнивает желаемый режим ЖР с текущим режимом эксплуатации TP для определения того, запрашивается ли изменение режима эксплуатации. Если желаемый режим ЖР является таким же, что и текущий режим TP, указывая на то, что эксплуатация снегохода 10 продолжается в текущем режиме TP, способ 500 возвращается на этап 505 для продолжения эксплуатации в текущем режиме ТР. Если на этапе 520 определяется, что ЖР будет отличаться от TP, указывая на то, что требуется изменение режима эксплуатации снегохода 10, способ 500 переходит к этапу 530 для определения того, когда должен быть изменен режим эксплуатации.
[00106] На этапе 530 ЭБУ определяет положение механизма привода дроссельной заслонки ПП на основе сигналов, полученных от датчика положения механизма привода дроссельной заслонки 204.
[00107] На этапе 535 ЭБУ определяет скорость транспортного средства СТС на основании сигналов, посылаемых датчиком скорости транспортного средства 202.
[00108] На этапе 540 ЭБУ 200 определяет, находится ли по меньшей мере положение механизма привода дроссельной заслонки ПП или скорость транспортного средства СТС в диапазоне, определенном их соответствующими пороговыми значениями, при котором допускается изменение режима эксплуатации.
[00109] На этапе 540 ЭБУ 200 сравнивает положение механизма привода дроссельной заслонки ПП с нижним пороговым значением положения механизма привода дроссельной заслонки ППНПЗ и верхним пороговым значением положения механизма привода дроссельной заслонки ППВПЗ. На этапе 540 ЭБУ 200 также сравнивает скорость транспортного средства СТС с нижним пороговым значением скорости транспортного средства СТСНПЗ. Если ЭБУ 200 определяет, что положение механизма привода дроссельной заслонки ПП меньше или равно нижнему пороговому значению ПП≥ППНПЗ, способ переходит к этапу 570 для изменения режима эксплуатации. В альтернативном варианте, если положение механизма привода дроссельной заслонки ПП больше или равно верхнему пороговому значению ПП≤ППВПЗ, способ переходит к этапу 570 для изменения режима эксплуатации. Кроме того, способ также выполняет этап 570 для изменения режима эксплуатации, если на этапе 540 определено, что скорость транспортного средства СТС больше или равна нижнему пороговому значению СТС≥СТСНПЗ.
[00110] Если на этапе 540 положение механизма привода дроссельной заслонки ПП определено как меньшее, чем верхнее пороговое значение ППВПЗ, и большее, чем нижнее пороговое значение ППНПЗ, и, кроме того, что скорость транспортного средства СТС определена как меньшая, чем нижнее пороговое значение СТСНПЗ, режим эксплуатации не изменяется моментально, а способ 500 возвращается на этап 505 для продолжения работы в текущем режиме ТР. В некоторых вариантах реализации изобретения, способ 500 ожидает, пока одно из условий этапа 540 не будет выполнено перед изменением режима эксплуатации. В этом случае, способ возвращается к этапу 530 (как показано с помощью пунктирной линии), вместо этапа 505, чтобы продолжить контролировать положение механизма привода дроссельной заслонки ПП и скорости автомобиля СТС, таким образом, режим может быть изменен, когда одно из условий на шаге 540 будет выполнено. В некоторых вариантах реализации изобретения, способ 500 будет ожидать в течение предварительно заданного периода времени изменения положения механизма привода дроссельной заслонки ПП и/или скорости транспортного средства СТС, при которых условия на этапе 540 будут выполнены. Способ 500 может дополнительно включать в себя этап, на котором ЭБУ 200 передает сигнал в блок устройства отображения 64 для отображения соответствующего сообщения/информации (например, с помощью мигающего индикатора или значка, текстового сообщения или тому подобного) в качестве информации для водителя снегохода, что режим еще не был изменен. Показания индикатора обновляются (например, мигающий индикатор перестает мигать и гаснет или продолжает светиться) для информирования о том, что, либо изменение режима было выполнено, либо истекло время (прошло больше времени, чем предварительно заданный период времени, в течение которого условия на этапе 540 не были выполнены).
[00111] Как будет понятно специалистам в данной области техники, переход из одного режима к другому выполняется без необходимости того, чтобы положение механизма привода дроссельной заслонки ПП соответствовало положению ПП механизма привода дроссельной заслонки на холостом ходу ПДЗХХ. Другими словами, режим может быть изменен во время активной эксплуатации транспортного средства 10 и двигатель 24 способен передавать крутящий момент для передвижения транспортного средства 10 вперед.
[00112] В некоторых вариантах реализации изобретения, способ 500 сравнивает положение механизма привода дроссельной заслонки со вторым нижним пороговым значением ППНПЗГ, которое больше, чем нуль, и меньше, чем нижнее пороговое значение ППНПЗ. Способ 500 будет изменять режим только в том случае, если положение механизма привода дроссельной заслонки ПП больше, чем это второе пороговое значение положения привода дроссельной заслонки ППНПЗГ.
[00113] Предполагается, что ЭБУ 200 может определить положение дроссельной заслонки ПДЗ и изменить режим эксплуатации, если положение дроссельной заслонки ПДЗ больше, чем положение дроссельной заслонки на холостом ходу ПДЗХХ для текущего режима эксплуатации. Предполагается, что существует также пороговое значение положения дроссельной заслонки для задания условий, при которых возможно изменение режимов эксплуатации.
[00114] Также предполагается, что способ 500 может иметь дополнительный этап 515 определения положения механизма привода дроссельной заслонки ПП. Этап 540 может включать дополнительное сравнение (не показано) между данным начальным значением ПП1 положения механизма привода дроссельной заслонки ПП с положением механизма привода дроссельной заслонки ПП, определенным на этапе 520, и выполнить изменение режима эксплуатации, даже если ПП больше, чем предыдущее положение ПП1. Таким образом, режим эксплуатации может быть изменен, даже если транспортное средство 10 ускоряется.
[00115] На этапе 570 ЭБУ 200 устанавливает текущий режим работы TP в качестве желаемого режима ЖР (i.е.ТР=ЖР). ЭБУ 200 получает доступ к картам управления и алгоритмам, характерным для нового режима ЖР. Кроме того, на этапе 580, ЭБУ 200 передает сигнал в блок устройства отображения 64 для отображения информации о том, что режим был изменен. Затем, способ 500 возвращается к этапу 505 для управления двигателем 24 в новом режиме ЖР.
[00116] При изменении режима эксплуатации кривая ответной реакции дроссельной заслонки 102, 104, 106, используемая ЭБУ 200 для управления дроссельной заслонкой 70, также изменяется. Как можно видеть на фиг. 6А, могут быть значительные различия между положением дроссельной заслонки ПДЗ в различных режимах, при одном и том же соответствующем положении механизма привода дроссельной заслонки ПП. Таким образом, изменение в режиме эксплуатации влечет за собой изменение положения дроссельной заслонки ПДЗ из начального (текущий режим) положения дроссельной заслонки ПДЗ к конечному (желаемому режиму) положению дроссельной заслонки ПДЗ. Окончательное положение дроссельной заслонки зависит от того, изменялось или нет положение механизма привода дроссельной заслонки ПП водителем снегохода 10 во время выполнения изменений в режиме эксплуатации.
[00117] Как показано на фиг. 6А, переходы 110, 112 иллюстрируют изменение в режиме эксплуатации во время изменения положения механизма привода дроссельной заслонки ПП. Переход 110 представляет собой переход от экономичного к стандартному режиму эксплуатации или наоборот. Переход 112 иллюстрирует переход от стандартного к спортивному режиму эксплуатации и наоборот. Также предполагается, что водитель снегохода 10 может удерживать рычаг дроссельной заслонки 37 в постоянном положении при выполнении запроса на изменение режима работы с текущего режима TP на желаемый режим ЖР. Переходы 110', 112', соответственно, иллюстрируют переходы между экономичным и стандартным режимом и наоборот, а также между стандартным и спортивным режимом и наоборот, при постоянном положении рычага дроссельной заслонки ПП во время смены режимов.
[00118] Во всех вышеперечисленных ситуациях, режим эксплуатации изменяется с текущего режима TP на желаемый режим ЖР, таким образом, что положение дроссельной заслонки ПДЗ изменяется с начального (текущий режим) положения дроссельной заслонки ПДЗТР на конечное (желаемый режим) положение дроссельной заслонки ПДЗЖР постепенно и непрерывно, как функция от времени, как показано на фиг. 6В, а не резко и прерывисто. Таким образом, изменение режима эксплуатации занимает ограниченное количество времени, зависящее от скорости перехода и определенных значений начальных и конечных положений дроссельной заслонки ПДЗ, и, дополнительно, от начальных и конечных положений механизма привода дроссельной заслонки ПП.
[00119] ЭБУ 200 управляет переходом с текущего режима TP к желаемому режиму ЖР эксплуатации на основании предварительно заданных алгоритмов. Фиг. 6В иллюстрирует пример изменения положения дроссельной заслонки ПДЗ, как функции от времени, при переходе 110 между экономичным и стандартным режимами, и при переходе 112 между стандартным и спортивным режимами. Скорость перехода выражается в % в секунду и определяется, как изменение положения дроссельной заслонки ПДЗ, как функции от времени. Мгновенное изменение положения дроссельной заслонки ПДЗ представляет собой разницу между положением дроссельной заслонки в заданный момент времени ПДЗ(t) и начальным положением дроссельной заслонки ПДЗТР. Скорость перехода 110 между экономичным режимом и стандартным режимом отличается по сравнению со скоростью перехода 112 между стандартным и спортивным режимами.
[00120] В проиллюстрированном варианте реализации изобретения, скорость перехода не зависит от направления перехода 110, 112. Предполагается, что скорость перехода при переходах 110, 112 может также зависеть от направления перехода 110 или 112. Таким образом, скорость перехода при переходе "вверх" (т.е. из экономичного к стандартному для перехода 110, и со стандартного к спортивному, для перехода 112) отличается от скорости перехода для соответствующего перехода "вниз" (т.е. со спортивного к стандартному, для перехода 112, и со стандартного к экономичному, для перехода 110).
[00121] В проиллюстрированном варианте реализации изобретения, изменение режима эксплуатации разрешается только отдельными этапами, т.е. от экономичного к стандартному режиму, и наоборот, и от стандартного к спортивному, и наоборот. Предполагается, что изменение режима эксплуатации также допускается со спортивного к экономичному, и/или наоборот. Дополнительно предполагается, что скорость перехода, для изменения режима эксплуатации, между спортивным и экономичным режимом может быть больше или меньше, чем скорость перехода для переходов 110, 112.
[00122] Когда начальное положение дроссельной заслонки ПДЗТР для текущего режима такое же, как конечное положение дроссельной заслонки для желаемого режима ПДЗЖР, например, при переходе (не показан) 108 на фиг. 6А между стандартным и спортивным режимом, при удержании рычагом дроссельной заслонки 37 постоянного положения ПП механизма привода дроссельной заслонки, равном 100%, изменение режима эксплуатации с текущего режима TP на желаемый режим ЖР осуществляется мгновенно, поскольку изменение положения дроссельной заслонки, как проиллюстрировано на фиг. 6В, не требуется.
[00123] Предполагается также, что для некоторых переходов, водителю снегохода 10 может потребоваться изменить положение механизма привода дроссельной заслонки ПП. Ответная реакция дроссельной заслонки 102, 104, 106 и переходы 110, 112, 110', 112' между ними, как показано на фиг. 6А и 6В соответственно, заданы исключительно в качестве примера, и настоящее описание не ограничивается переходами, проиллюстрированными в данном документе.
[00124] Эксплуатация снегохода 10 в различных режимах также может быть основана на информации, закодированной в ключе системы безопасности 234. В дополнение к идентификационной информации, упомянутой выше, ключ 234 может также содержать рабочие параметры для эксплуатации снегохода 10.
[00125] Как проиллюстрировано на фиг. 7В, в одном варианте реализации транспортного средства 10, транспортное средство 10 снабжено несколькими ключами 234, 234', 234'', каждый из которых, соответственно, прикреплен к соответствующему шнуру 236, 236' 236'', как можно видеть на фиг. 7В. В каждом ключе 234, 234', 234'' кодируется информация для ограничения определенных параметров, например, скорости транспортного средства СТС, крутящего момента двигателя, и тому подобных, чтобы адаптировать характеристики снегохода для разных водителей, имеющих разные ключи 234, 234', 234''. Когда ключ 234, 234', 234'' находится в гнезде для ключа 232, и если ключ 234, 234', 234'' авторизован, ЭБУ 200 извлекает информацию, например, о параметрах ограничений и/или описании ключа, связанных с эксплуатацией транспортного средства 10, и, соответственно, управляет эксплуатацией транспортного средства 10.
[00126] Например, первый ключ 234 может быть стандартным ключом без ограничений, применяемых к любой из стандартных характеристик транспортного средства, например, скорости транспортного средства и положению открытия дроссельной заслонки ПДЗ. Водитель, управляющий снегоходом 10, используя стандартный ключ 234, может эксплуатировать снегоход 10 в любом из двух или более различных режимов, например, СПОРТ, СТД, ЭКО, и связь между положением дроссельной заслонки ПДЗ, как функции изменения положения механизма привода дроссельной заслонки ПП, показана на фиг. 6, для примера.
[00127] Транспортное средство также может быть снабжено вторым ключом 234', который может быть закодирован для ограничения максимальной скорости транспортного средства СТС, например, максимум 70 км/ч. Третий ключевой 234'' может быть закодирован с другим ограничением максимальной скорости транспортного средства СТС, например, 40 км/ч. Ключи 234', 234'', которые имеют такие ограничения, связанные с их использованием, в данном документе называют "обучаемыми ключами".
[00128] Скорость транспортного средства СТС может быть ограничена путем ограничения выходного крутящего момента двигателя, который, в свою очередь, может быть ограничен за счет ограничения положения дроссельной заслонки клапана ПДЗ до значения, меньшего чем 100%. Максимальное положение дроссельной заслонки ПДЗ может быть ограничено до значения, которое обеспечивает достаточный крутящий момент двигателя для приведения в движение транспортного средства 10 вперед по ровной горизонтальной поверхности, при максимальной скорости СТС, обусловленной данным обучаемым ключом 234', 234''. Например, для конкретного транспортного средства 10, эксплуатируемого с использованием обучаемого ключа 234', максимальному положению дроссельной заслонки ПДЗ установлено значение 75%, чтобы ограничить скорость ниже 70 км/ч.
[00129] Как показано на фиг. 9, обучаемый ключ 234', 234'' также может быть закодирован таким образом, чтобы ограничивать или иным образом управлять ускорением транспортного средства 10, когда он эксплуатируется с обучаемым ключом 234', 234''. Ускорением транспортного средства 10 можно управлять путем регулирования выходного крутящего момента двигателя. Транспортное средство 10 может иметь различные параметры крутящего момента двигателя, соответствующие различным настройкам ускорения.
[00130] Как показано на фиг. 9, первая настройка крутящего момента τ1 обучаемого ключа позволяет транспортному средству 10 иметь постоянное ускорение при эксплуатации транспортного средства 10 со стандартным ключом 234 (т.е. 100% положение механизма привода ПП = достигается в положении дроссельной заслонки ПДЗ, равному 100%), однако, как только достигается определенная скорость транспортного средства СТС1, в этой точке ЭБУ 200 ограничивает открытие дроссельной заслонки ПДЗ (даже, если положение механизма привода дроссельной заслонки ПП остается равным 100%) тем положением дроссельной заслонки ПДЗ, при котором скорость транспортного средства 10 будет поддерживаться на максимальном значении СТС, установленном для определенного используемого обучаемого ключа 234', 234''. Такое управление крутящим моментом/ускорением позволяет пользователю, использующему обучаемый ключ 234', 234'', получать высокое ускорение, при этом максимальная скорость транспортного средства СТС будет ограничена. Этот тип управления крутящим моментом/ускорением может подходить, к примеру, для водителей со средним уровнем подготовки.
[00131] Как показано на фиг. 9, транспортное средство 10 снабжено другой настройкой крутящего момента τ2 обучаемого ключа, при которой транспортное средство 10 имеет ограничение максимальной скорости транспортного средства СТС такое же, как и для настройки крутящего момента τ1 обучаемого ключа, тем не менее, ускорение ограничено значением, меньшим, чем для настройки крутящего момента τ1 обучаемого ключа. Таким образом, при настройке крутящего момента τ2 обучаемого ключа, положение дроссельной заслонки ПДЗ управляется таким образом, чтобы увеличить соответствующую постоянную степень открытия, но ограничить максимальное открытие дроссельной заслонки ПДЗ более низким значением, для обеспечения меньшей интенсивности ускорения, по сравнению с настройкой крутящего момента τ1 обучаемого ключа.
[00132] Продолжая ссылаться на фиг. 9, в проиллюстрированном варианте реализации изобретения, транспортное средство 10 снабжено другой настройкой крутящего момента τ3 обучаемого ключа, при которой максимальная скорость СТС транспортного средства 10 ограничена таким же значением, как и при настройке крутящего момента τ1 и τ2 обучаемого ключа, однако транспортное средство 10 ограничивается меньшим ускорением, по сравнению с настройками крутящего момента τ1 и τ2 обучаемого ключа.
[00133] Для простоты, на фиг. 9, все три кривых настройки крутящего момента τ1, τ2, τ3 обучаемого ключа проиллюстрированы при положении механизма привода дроссельной заслонки ПП, равном 100%, на всем протяжении процесса ускорения. Если текущее положение механизма привода дроссельной заслонки ПП установлено водителем во время ускорения на уровне 100%, при этом соответствующее положение дроссельной заслонки ПДЗ будет установлено на уровне, соответствующем мгновенному положению механизма привода дроссельной заслонки ПП, до достижения максимальной скорости транспортного средства СТС1, в котором ЭБУ 200 либо снизит степень открытия дроссельной заслонки ПДЗ, либо будет поддерживать текущий уровень открытия дроссельной ПДЗ заслонки для поддержания скорости транспортного средства СТС на максимально доступном значении СТС1, даже если водитель транспортного средства 10 продолжает увеличивать положение механизма привода дроссельной заслонки ПП. Во всех трех настройках крутящего момента τ1, τ2, τ3 обучаемого ключа, оговоренных выше, максимальный выходной крутящий момент ограничен некоторым значением, при котором скорость транспортного средства растет от 0 до максимально допустимого значения скорости транспортного средства СТС1.
[00134] Как показано на фиг. 8А и 8В, обучаемые ключи 234', 234'' позволяют водителю эксплуатировать транспортное средство 10 в двух или более режимах вождения, например, СПОРТ, СТД или ЭКО режимах. Это позволяет водителю, использующему обучаемые ключи 234', 234'', иметь возможность персонального управления, даже если определенные параметры ограничены более низкими значениями, по сравнению с водителем, использующим стандартный ключ 134. Для водителя, использующего обучаемый ключ 234', 234'', каждый режим имеет аналогичную связь между положением механизма привода дроссельной заслонки ПП и положением дроссельной заслонки ПДЗ, как и у водителя, использующего стандартный ключ 234 (показан на фиг. 6А), за исключением того, что положение дроссельной заслонки ПДЗ для любого заданного положения механизма привода дроссельной заслонки ПП будет пропорционально ограничению максимального положения дроссельной заслонки ПДЗ, связанному с определенным ключом 234', 234''.
[00135] Таким образом, используя приводимый выше в качестве примера обучаемый ключ 234', как показано на фиг. 8А, когда водитель, использующий обучаемый ключ 234', изменяет положение механизма привода дроссельной заслонки ПП от 0% до 100% в режиме СПОРТ, положение дроссельной заслонки ПДЗ изменяется от положения дроссельной заслонки на холостом ходу ПДЗХХСПОРТ до значения, равного 75%. В режиме ЭКО, при использовании стандартного ключа 234, открытие дроссельной заслонки ограничивается значением 50%, как можно видеть на фиг. 6А. При использовании обучаемого ключа 234' в режиме ЭКО, открытие дроссельной заслонки ПДЗ изменяется от положения дроссельной заслонки на холостом ходу ПДЗХХЭКО до 37,5%. Как показано на фиг. 8В, когда водитель, использующий обучаемый ключ 234'', изменяет положение механизма привода дроссельной заслонки ПП от 0% до 100% в режиме СПОРТ, положение дроссельной заслонки ПДЗ изменяется от положения дроссельной заслонки на холостом ходу ПДЗХХСПОРТ до 50%. При использовании обучаемого ключа 234'' в режиме ЭКО, открытие дроссельной заслонки ПДЗ изменяется от положения дроссельной заслонки на холостом ходу ПДЗХХЭКО до 25%. Следует понимать, что значения, перечисленные в данном документе, приведены исключительно в качестве примера, и обучаемые ключи 234', 234'' могут ограничивать скорость транспортного средства СТС и положение дроссельной заслонки ПДЗ другими значениями, отличными от тех, которые описаны в данном документе.
[00136] Следует принимать во внимание, что обучаемые ключи 234', 234'' могут быть идентифицированы и связаны с различными рабочими параметрами, например, максимальной скоростью транспортного средства, максимальным ускорением, и тому подобными, которые не могут быть изменены с использованием обучаемых ключей 234', 234'', однако могут быть изменены только с помощью стандартного ключа 234.
[00137] Предполагается, что предельные рабочие параметры, такие как максимальная скорость транспортного средства СТС, максимальный выходной крутящий момент двигателя и тому подобные, связанные с обучаемыми ключами 234', 234'', могут быть сохранены в ЭБУ 200 вместо самих обучаемых ключей 234', 234''. Также предполагается, что ограничения параметров, связанных с обучаемыми ключами 234', 234'', может изменяться посредством ЭБУ 200, чтобы избежать необходимости в наличии множества обучаемых ключей 234', 234''. В одном варианте реализации изобретения, ограничение(я), связанные с обучаемым ключом 234', изменяются путем выполнения следующих шагов: нажатия переключателя запуска 220 для инициализации и пробуждения электрической системы; установки стандартного ключа 234 в гнездо для ключа 232 и изменения параметров ограничения(ий), которые были ранее сохранены в ЭБУ 200 с использованием ввода данных пользователем, например, путем выбора и использования кнопок режимов, предоставляемых блоком устройства отображения. Предполагается, что различные последовательности шагов, или ввода пользователем данных, могут быть использованы для ввода и сохранения предельных параметров ограничения в ЭБУ 200. Как только новые параметры для обучаемого ключа 234' будут сохранены в ЭБУ 200, а затем стандартный ключ 234 будет заменен на обучаемый ключ 234', установленный в гнездо для ключа 232, ЭБУ 200 опознает его, как обучаемый ключ 234' и использует новые параметры ограничений при эксплуатации транспортного средства 10. ЭБУ 200 выполнен с возможностью ограничения использования водителем транспортного средства 10 обучаемого ключа 234' для изменения параметров ограничений, и обучаемый ключ 234' не может быть запрограммирован в качестве стандартного ключа 234. Таким образом, параметры ограничений для максимального крутящего момента двигателя, максимальной скорости транспортного средства СТС и тому подобных, связанные с обучаемым ключом 234', имеют более низкие значения, чем у стандартного ключа 234.
[00138] На фиг. 10 схематично проиллюстрированы выбор и настройка рабочих параметров при эксплуатации транспортного средства с использованием обучаемых ключей 234', 234''. Как видно, максимальная скорость транспортного средства СТС1 представляет собой первую установку, после которого настройки крутящего момента обучаемого ключа выбираются из одной из трех установок τ1, τ2, τ3. В проиллюстрированном варианте реализации изобретения, транспортное средство 10 снабжено тремя различными настройками крутящего момента τ1, τ2, τ3, однако предполагается, что транспортное средство 10 может иметь две, или больше чем три различных настройки крутящего момента. Установка максимальной скорости транспортного средства СТС1 обучаемого ключа и установка крутящего момента обучаемого ключа могут быть выполнены только с помощью стандартного ключа 234, установленного в гнездо для ключа 232. Тем не менее водитель, использующий обучаемый ключ 234', 234'', не ограничен в выборе режима эксплуатации (СПОРТ, СТД, ЭКО, в проиллюстрированном варианте реализации изобретения) и выполняет изменение с одного режима на другой в соответствии со своими предпочтениями.
[00139] Модификации и усовершенствования вышеописанных вариантов реализации настоящего изобретения будут очевидными для специалистов в данной области техники. Вышеприведенное описание приведено в качестве примера, а не в качестве ограничений. Следовательно, объем настоящего изобретения ограничен исключительно объемом прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2782720C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2680209C2 |
| СНЕГОХОД | 2013 |
|
RU2719265C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2636249C2 |
| СПОСОБ ДЛЯ КОМПЛЕКСНОГО И ПОЭЛЕМЕНТНОГО ДИАГНОСТИРОВАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2538003C2 |
| Учебный стенд-тренажер по электронной системе управления двигателем внутреннего сгорания и способ его работы | 2022 |
|
RU2793016C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОБОРОТАМИ ДВИГАТЕЛЯ НА ХОЛОСТОМ ХОДУ | 2014 |
|
RU2678398C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2587187C2 |
| СПОСОБ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2716055C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ И СИСТЕМА ДВИГАТЕЛЯ | 2013 |
|
RU2617634C2 |
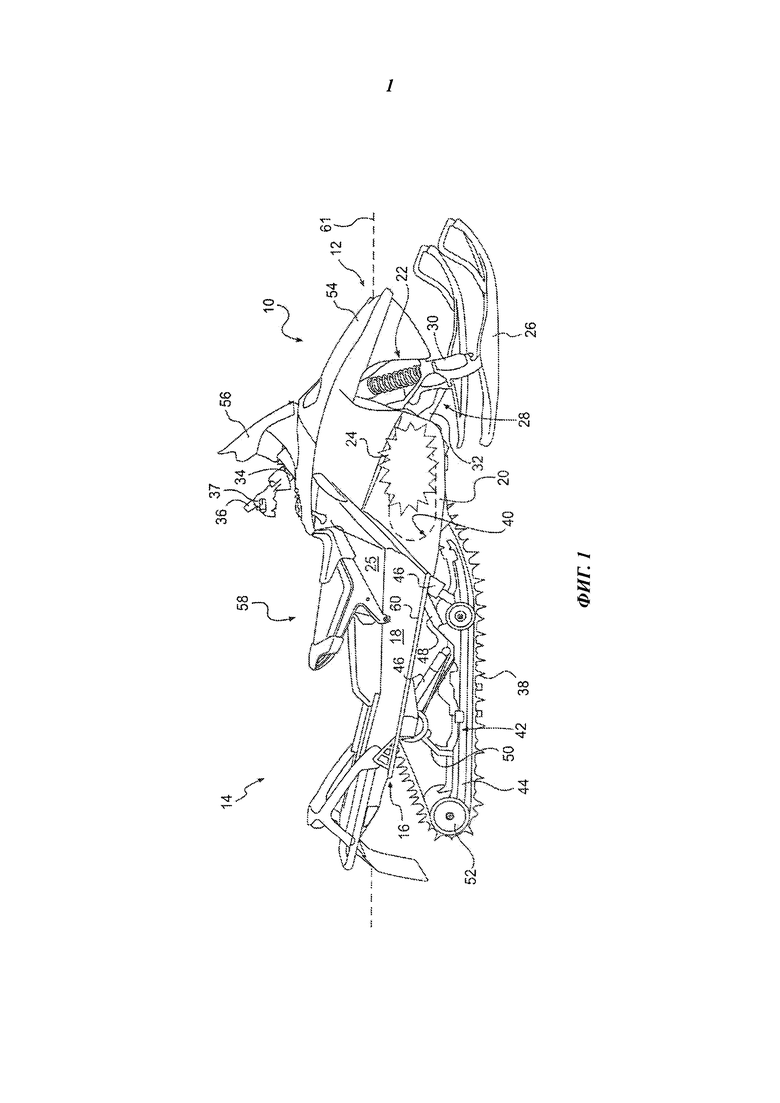
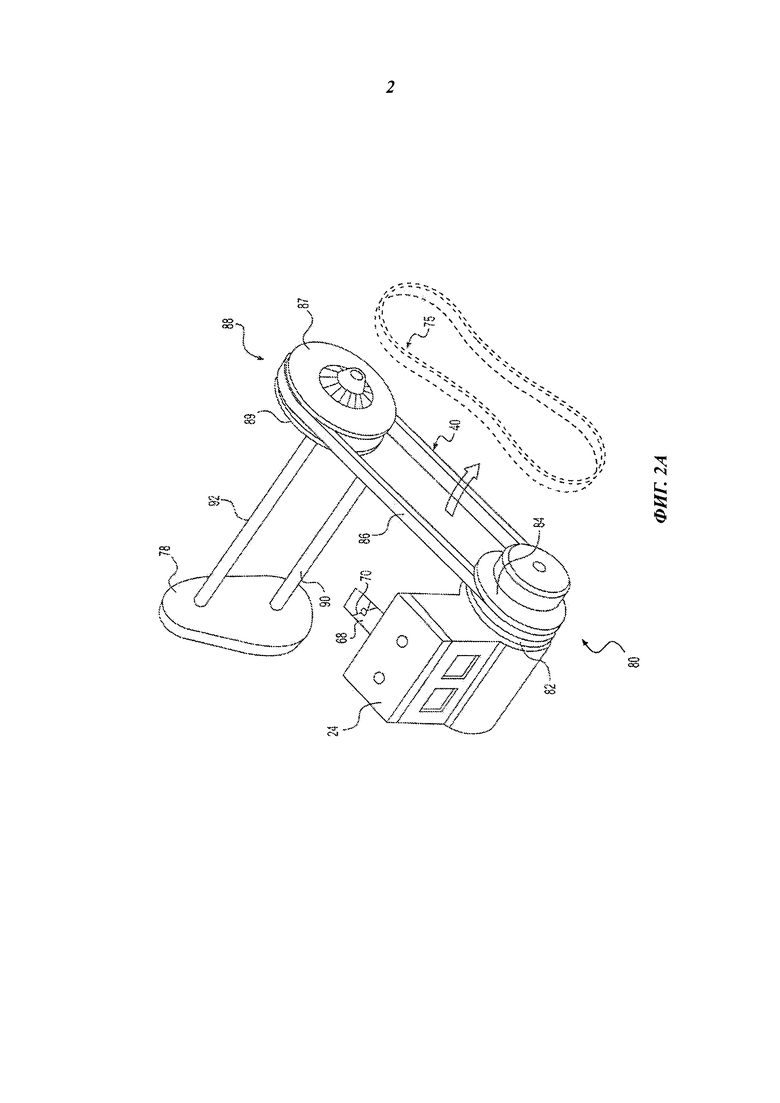

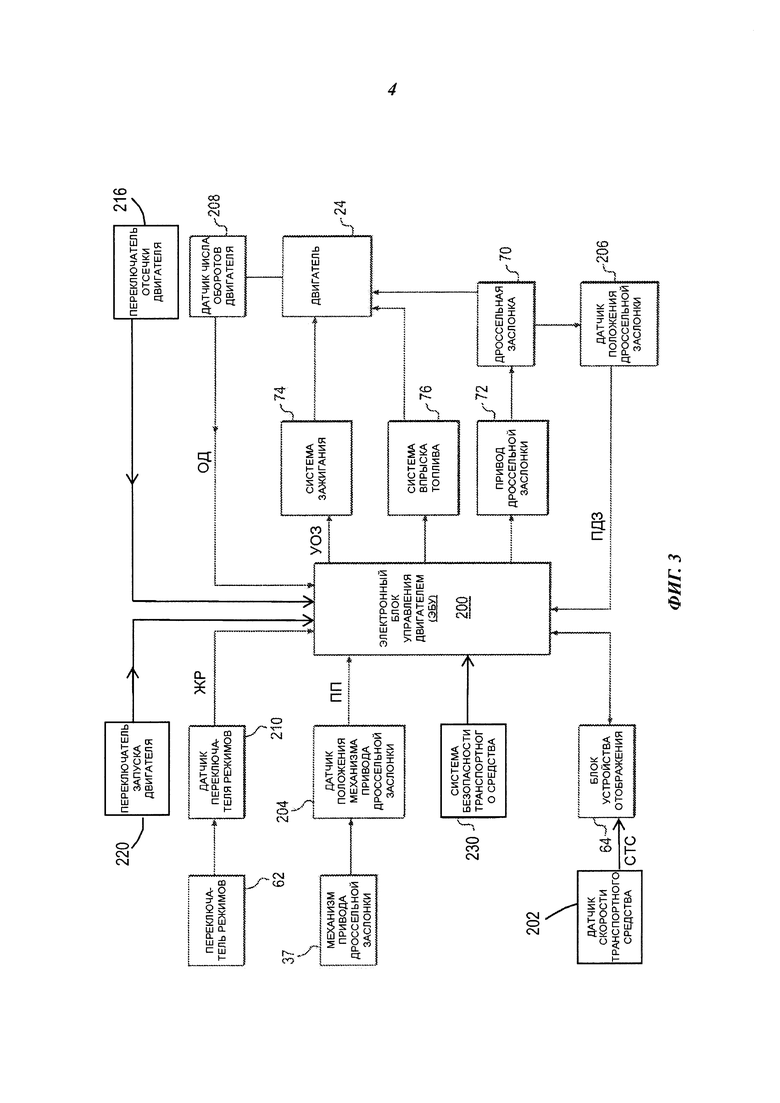
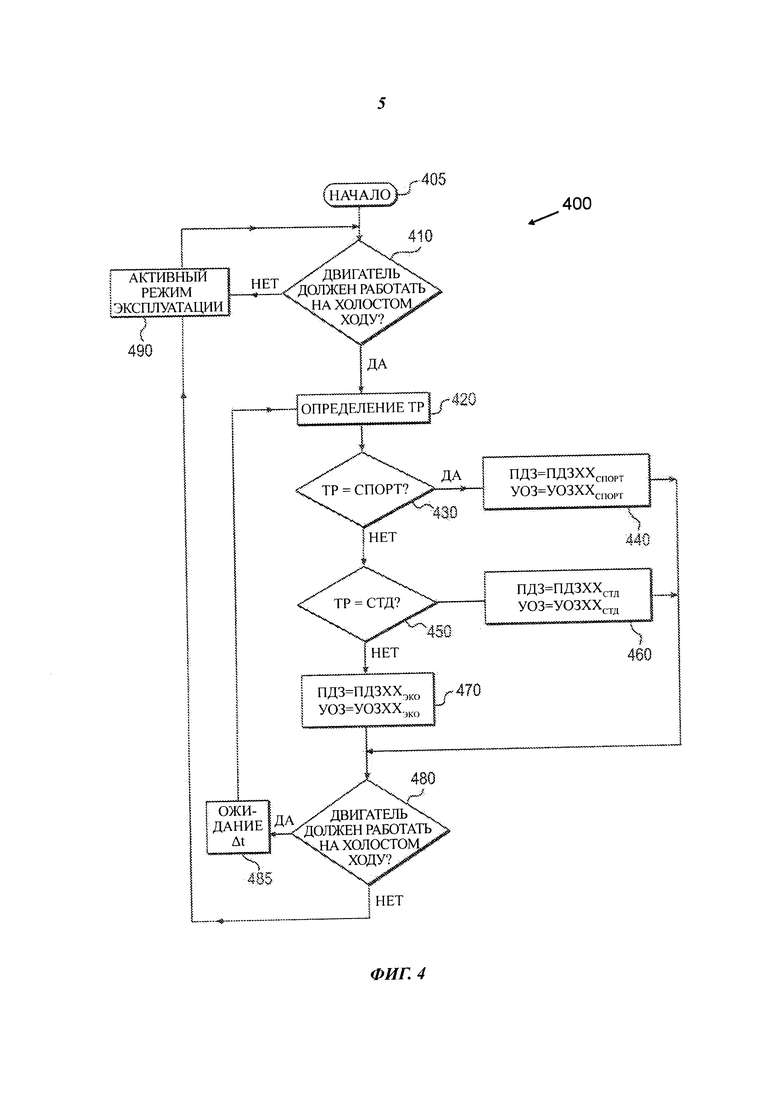
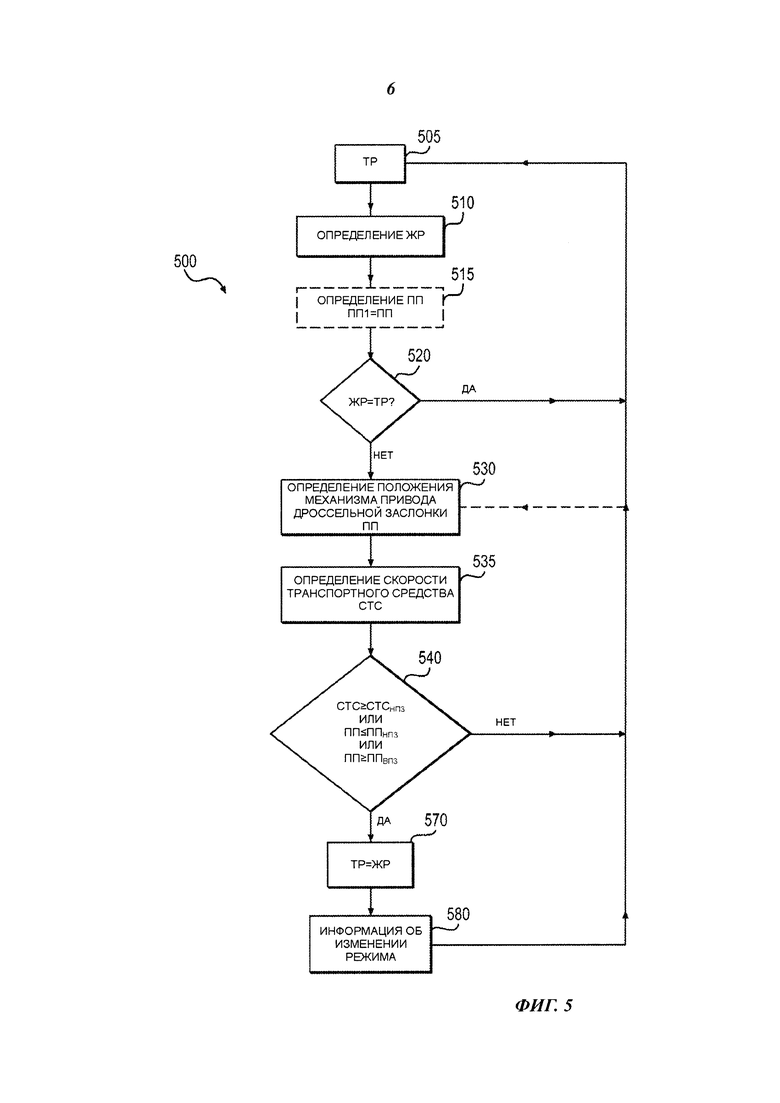
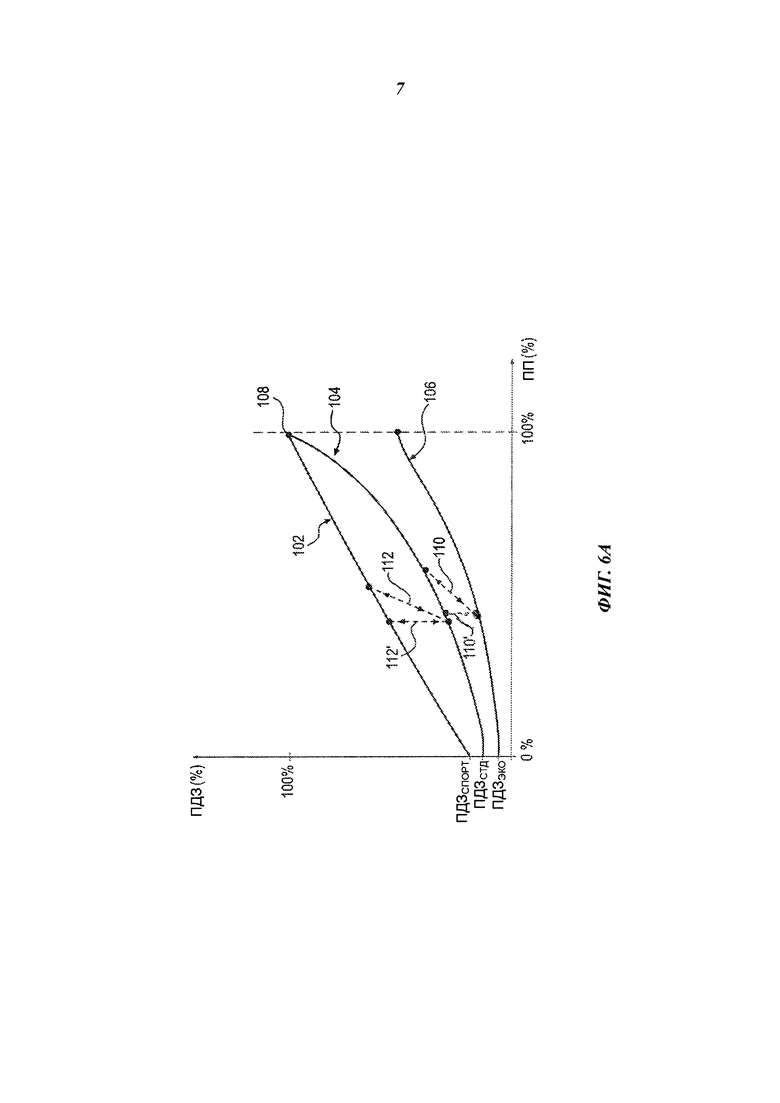
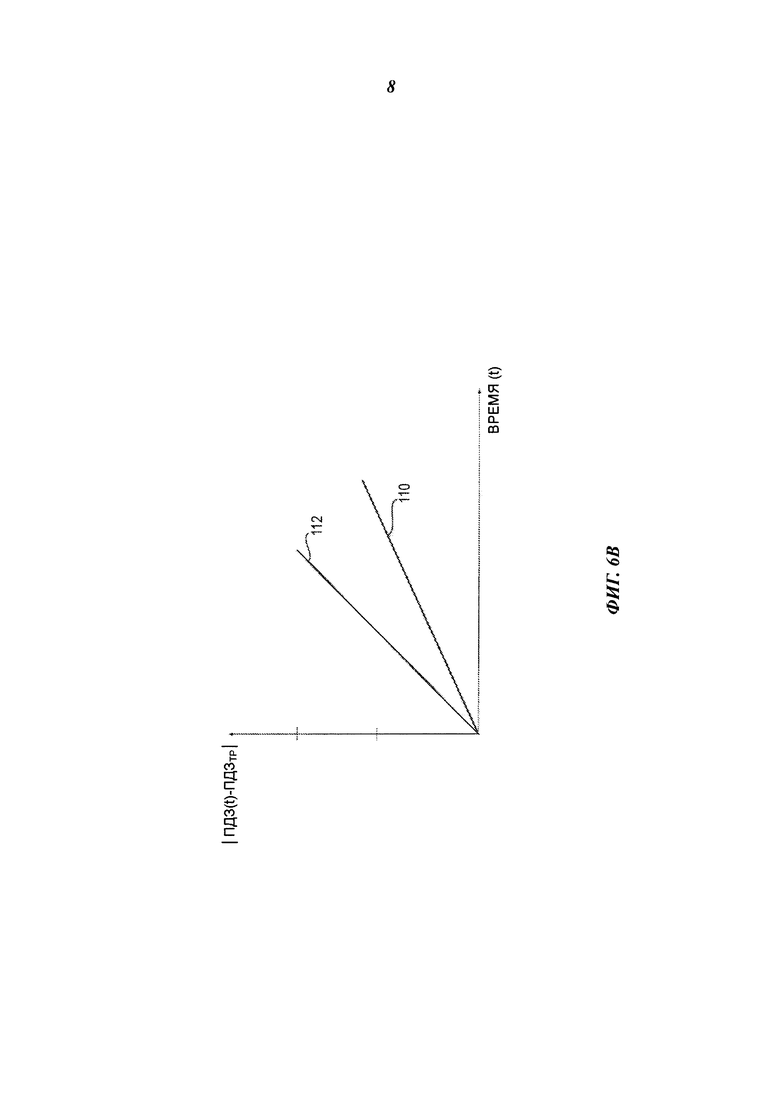
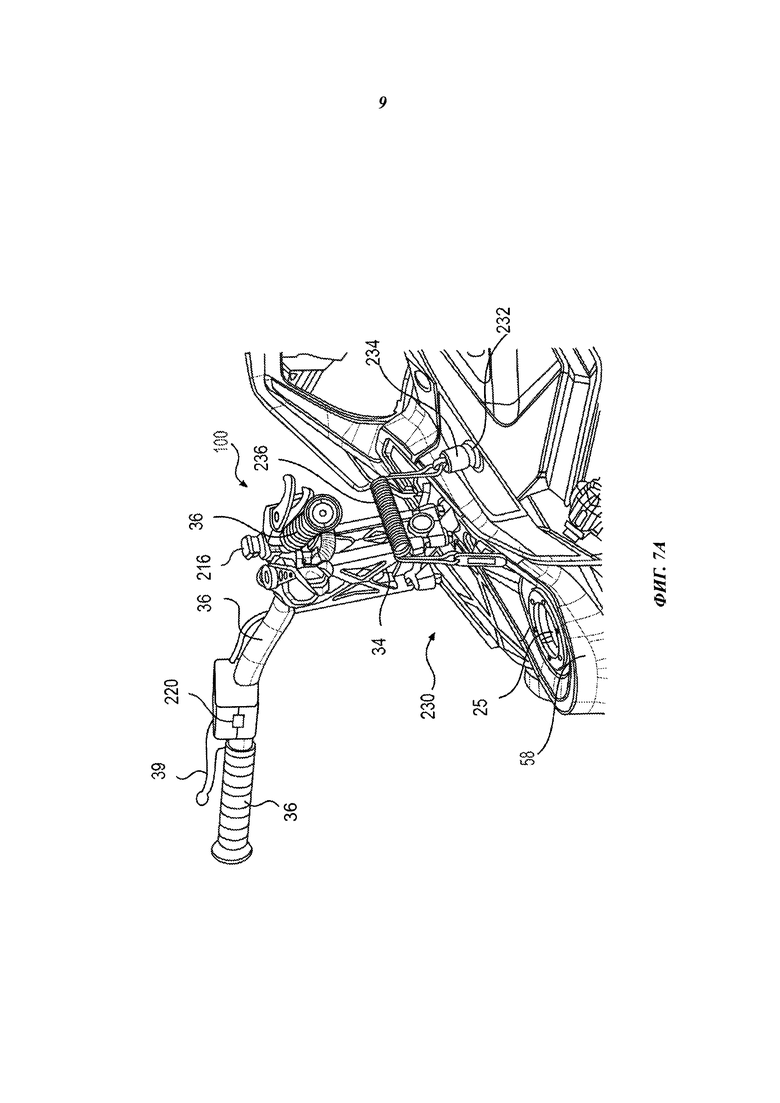
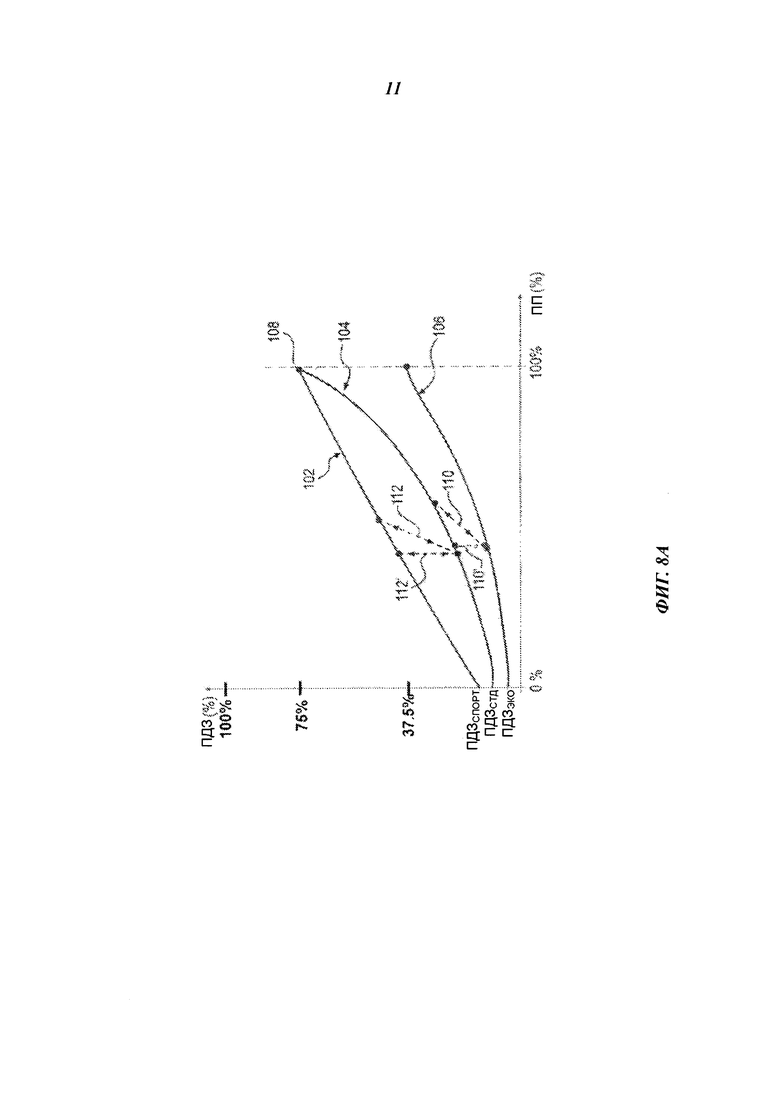
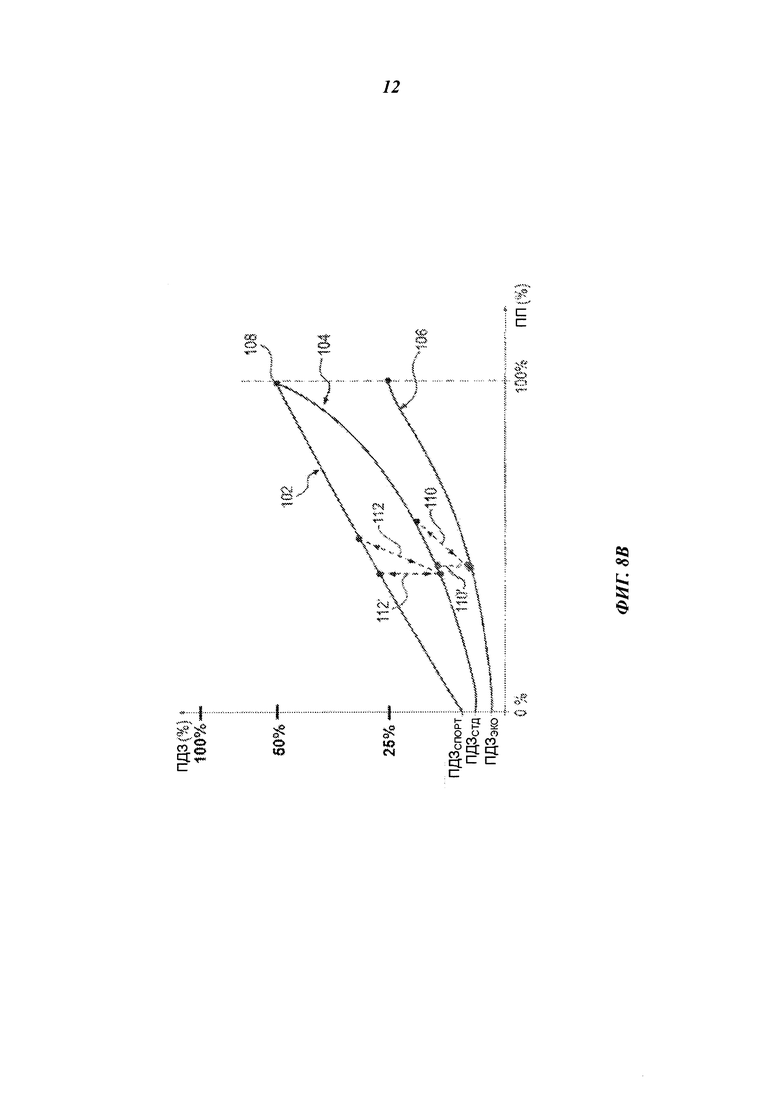
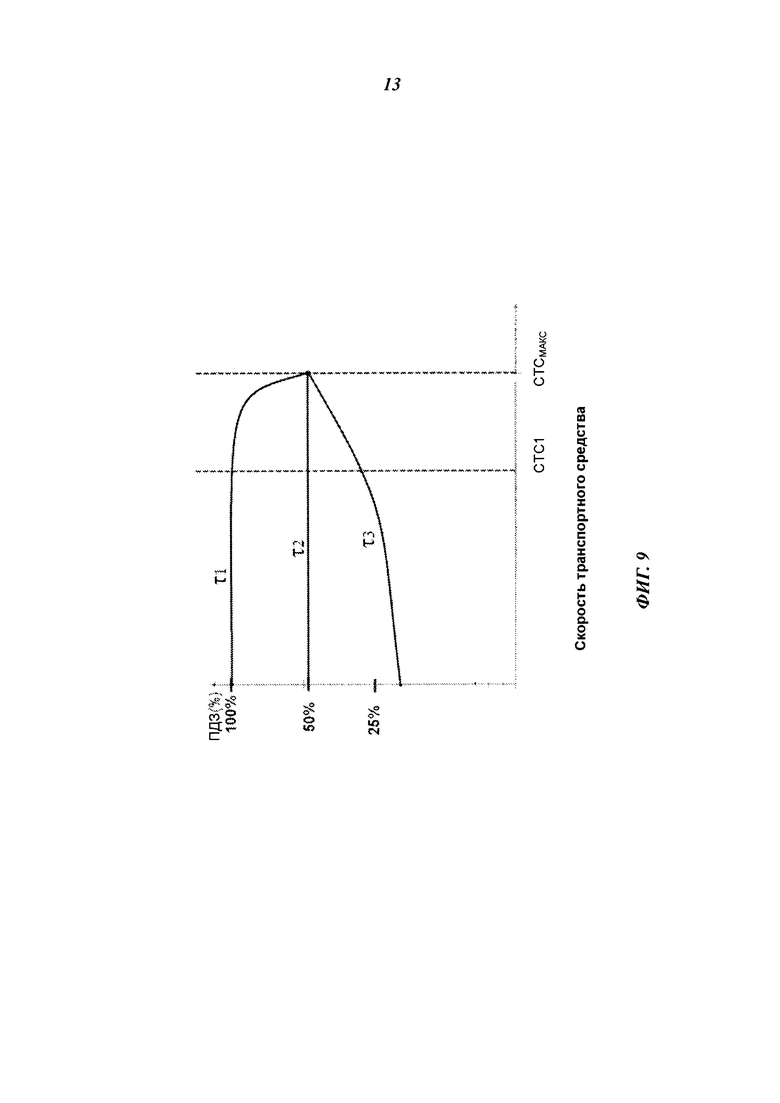
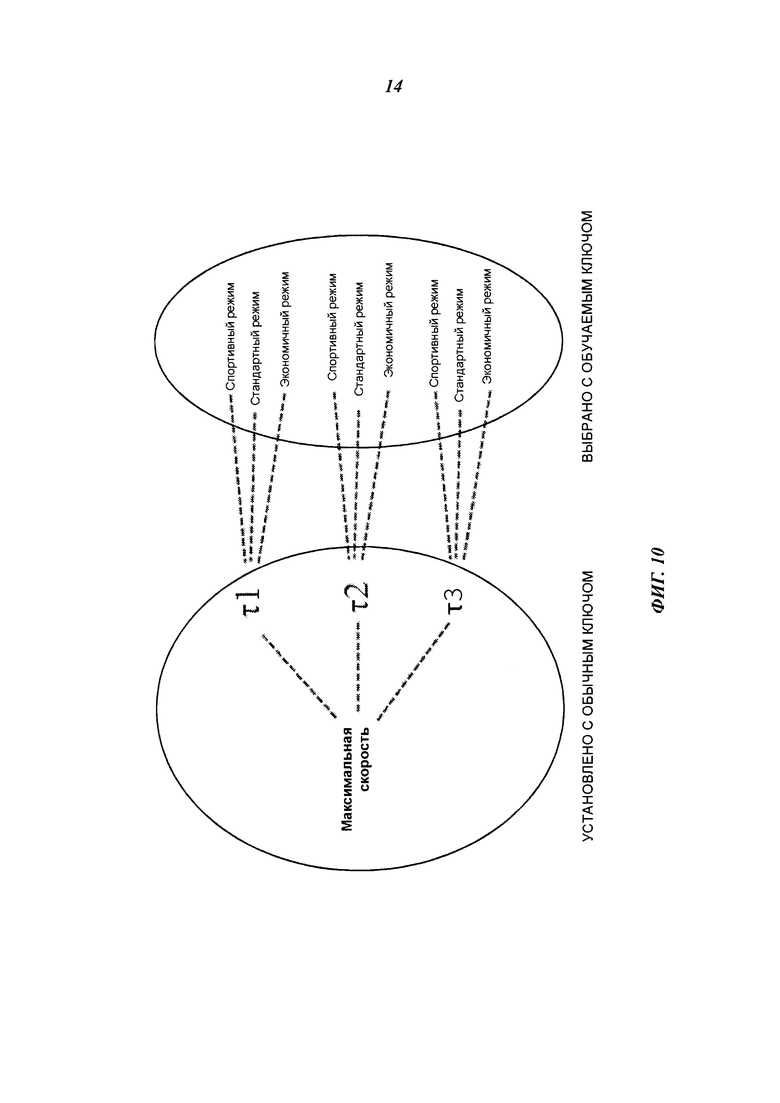
Изобретение может быть использовано при эксплуатации транспортных средств в различных режимах. Способ эксплуатации транспортного средства, содержащего двигатель, заключается в том, что определяют, следует ли двигателю работать на холостом ходу. Определяют текущий режим эксплуатации транспортного средства. Текущий режим эксплуатации может быть любым из множества режимов эксплуатации. Каждый из множества режимов эксплуатации транспортного средства включает в себя соответствующую активную работу двигателя и соответствующую работу двигателя на холостом ходу. Множество режимов эксплуатации включает по меньшей мере первый режим и второй режим. Осуществляют работу двигателя на холостом ходу с первым числом оборотов холостого хода, если текущий режим эксплуатации транспортного средства представляет собой первый режим эксплуатации. Осуществляют работу двигателя на холостом ходу со вторым числом оборотов холостого хода, если текущий режим эксплуатации транспортного средства представляет собой второй режим эксплуатации. Первое число оборотов холостого хода больше, чем второе число оборотов холостого хода. Раскрыты варианты способа эксплуатации транспортного средства, содержащего двигатель. Технический результат заключается в оптимизации характеристик управляемости транспортного средства в режиме холостого хода двигателя при различных режимах эксплуатации. 3 н. и 20 з.п. ф-лы, 14 ил.
1. Способ эксплуатации транспортного средства, содержащего двигатель, включающий:
определение того, следует ли двигателю работать на холостом ходу;
определение текущего режима эксплуатации транспортного средства, при этом текущий режим эксплуатации может быть любым из множества режимов эксплуатации, причем каждый из множества режимов эксплуатации транспортного средства включает в себя соответствующую активную работу двигателя и соответствующую работу двигателя на холостом ходу, при этом множество режимов эксплуатации включает по меньшей мере первый режим и второй режим; и
если определено, что двигателю следует работать на холостом ходу:
работу двигателя с первым числом оборотов холостого хода, если текущий режим эксплуатации транспортного средства представляет собой первый режим эксплуатации; и
работу двигателя со вторым числом оборотов холостого хода, если текущий режим эксплуатации транспортного средства представляет собой второй режим эксплуатации,
первое число оборотов холостого хода больше, чем второе число оборотов холостого хода.
2. Способ по п. 1, отличающийся тем, что двигатель соединен с корпусом дроссельной заслонки, при этом корпус дроссельной заслонки содержит дроссельную заслонку, дроссельная заслонка перемещается между множеством положений дроссельной заслонки, каждое положение дроссельной заслонки соответствует углу открытия дроссельной заслонки; и
отличающийся тем, что:
работа двигателя с первым числом оборотов холостого хода включает:
работу двигателя с первым углом опережения зажигания, и
позиционирование дроссельной заслонки в первом положении дроссельной заслонки;
и
работа двигателя со вторым числом оборотов холостого хода включает:
работу двигателя со вторым углом опережения зажигания, и
позиционирование дроссельной заслонки во втором положении дроссельной заслонки,
первый угол опережения зажигания имеет уменьшенный угол опережения зажигания по сравнению со вторым углом опережения зажигания, и
угол открытия дроссельной заслонки, соответствующий первому положению дроссельной заслонки, больше, чем угол открытия дроссельной заслонки, соответствующий второму положению дроссельной заслонки.
3. Способ по п. 1, отличающийся тем, что:
двигатель функционально связан с бесступенчатой коробкой передач, при этом коробка передач имеет число оборотов зацепления;
первое число оборотов холостого хода меньше, чем число оборотов зацепления; и
разница между первым числом оборотов холостого хода и числом оборотов зацепления меньше, чем разница между первым числом оборотов холостого хода и вторым числом оборотов холостого хода.
4. Способ по п. 1, дополнительно включающий:
определение желаемого режима эксплуатации, при этом желаемый режим эксплуатации может быть любым из множества режимов, включая первый режим и второй режим;
сравнение желаемого режима эксплуатации с текущим режимом эксплуатации транспортного средства; и
если желаемый режим эксплуатации отличается от текущего режима эксплуатации транспортного средства:
определение положения механизма привода дроссельной заслонки;
определение скорости транспортного средства; и
изменение режима эксплуатации транспортного средства с текущего режима эксплуатации на желаемый режим эксплуатации на основании, по меньшей мере, частично, положения механизма привода дроссельной заслонки и скорости транспортного средства.
5. Способ по п. 4, отличающийся тем, что этап изменения режима эксплуатации включает изменение режима эксплуатации транспортного средства в том случае, если выполняется любое из последующих условий:
скорость транспортного средства больше, чем пороговое значение скорости транспортного средства;
положение механизма привода дроссельной заслонки меньше, чем нижнее пороговое значение положения механизма привода дроссельной заслонки; и
положение механизма привода дроссельной заслонки больше, чем верхнее пороговое значение положения механизма привода дроссельной заслонки.
6. Способ по п. 5, дополнительно включающий:
информирование оператора транспортного средства об обновлении статуса изменения режима работы.
7. Способ по п. 5, дополнительно включающий:
продолжение эксплуатации транспортного средства в текущем режиме эксплуатации, если последующие условия не выполняются:
скорость транспортного средства больше, чем пороговое значение скорости транспортного средства;
положение механизма привода дроссельной заслонки меньше, чем нижнее пороговое значение положения механизма привода дроссельной заслонки; и
положение механизма привода дроссельной заслонки больше, чем верхнее пороговое значение положения механизма привода дроссельной заслонки;
и
изменение режима эксплуатации транспортного средства с текущего режима эксплуатации на желаемый режим эксплуатации в то время, когда выполняется одно из последующих условий:
скорость транспортного средства больше, чем пороговое значение скорости транспортного средства;
положение механизма привода дроссельной заслонки меньше, чем нижнее пороговое значение положения механизма привода дроссельной заслонки; и
положение механизма привода дроссельной заслонки меньше, чем верхнее пороговое значение положения механизма привода дроссельной заслонки.
8. Способ по п. 5, отличающийся тем, что пороговое значение скорости транспортного средства составляет 10 км/ч.
9. Способ по п. 5, отличающийся тем, что нижнее пороговое значение положения механизма привода дроссельной заслонки составляет 5% от максимального положения механизма дроссельной заслонки для текущего режима эксплуатации транспортного средства.
10. Способ по п. 5, отличающийся тем, что верхнее пороговое значение положения механизма привода дроссельной заслонки составляет 86% от максимального положения механизма дроссельной заслонки для текущего режима эксплуатации транспортного средства.
11. Способ по п. 4, отличающийся тем, что изменение режима эксплуатации с текущего режима на желаемый режим эксплуатации включает изменение, по меньшей мере, одного из следующих параметров:
максимальной выходной мощности двигателя;
максимального положения дроссельной заслонки; и
ответной реакции положения дроссельной заслонки, как функции изменения положения механизма привода дроссельной заслонки.
12. Способ по п. 11, отличающийся тем, что максимальное положение дроссельной заслонки во втором режиме представляет собой одно из значений, меньшее или равное максимальному значению положения дроссельной заслонки в первом режиме.
13. Способ по п. 12, отличающийся тем, что максимальное положение дроссельной заслонки во втором режиме составляет 50% от максимального значения положения дроссельной заслонки в первом режиме.
14. Способ по п. 11, отличающийся тем, что:
множество режимов эксплуатации транспортного средства дополнительно включает третий режим эксплуатации;
текущий режим эксплуатации представляет собой один из следующих режимов: первый режим, второй режим либо третий режим эксплуатации;
желаемый режим эксплуатации представляет собой любой другой из следующих режимов: первый режим, второй режим либо третий режим эксплуатации; и
отличающийся тем, что:
максимальное положение дроссельной заслонки во втором режиме является либо меньшим, либо равным максимальному положению дроссельной заслонки в первом режиме; и
максимальное положение дроссельной заслонки в третьем режиме меньше, чем максимальное положение дроссельной заслонки во втором режиме.
15. Способ по п. 11, отличающийся тем, что модификация ответной реакции дроссельной заслонки, как функции от положения механизма привода дроссельной заслонки, включает:
изменение положения дроссельной заслонки, как функции от времени.
16. Способ по п. 15, отличающийся тем, что скорость перехода при изменении положения дроссельной заслонки, как функции от времени, является такой же, как при переходе с первого режима ко второму режиму, так и при переходе со второго режима к третьему режиму.
17. Способ по п. 15, отличающийся тем, что:
множество режимов эксплуатации транспортного средства дополнительно включает третий режим эксплуатации;
текущий режим эксплуатации представляет собой один из следующих режимов: первый режим, второй режим либо третий режим эксплуатации;
желаемый режим эксплуатации представляет собой любой другой из следующих режимов: первый режим, второй режим либо третий режим эксплуатации; и
отличающийся тем, что:
скорость перехода, при изменении положения дроссельной заслонки, как функции от времени, больше при переходе между первым режимом и вторым режимом, чем при переходе между вторым режимом и третьим режимом.
18. Способ эксплуатации транспортного средства, содержащего двигатель, включающий:
определение текущего режима эксплуатации транспортного средства, при этом текущий режим эксплуатации может быть любым из множества режимов эксплуатации, и при этом множество режимов эксплуатации включает по меньшей мере первый режим и второй режим, и
определение желаемого режима эксплуатации, при этом желаемый режим эксплуатации может быть любым из множества режимов, включая первый режим и второй режим;
сравнение желаемого режима эксплуатации с текущим режимом эксплуатации транспортного средства; и
если желаемый режим эксплуатации отличается от текущего режима эксплуатации транспортного средства:
определение положения механизма привода дроссельной заслонки; и
изменение режима эксплуатации транспортного средства с текущего режима эксплуатации на желаемый режим эксплуатации, если положение механизма привода дроссельной заслонки больше, чем нижнее пороговое значение положения механизма привода дроссельной заслонки.
19. Способ по п. 18, отличающийся тем, что нижнее пороговое значение положения механизма привода дроссельной заслонки больше нуля.
20. Способ по п. 18, дополнительно включающий:
определение скорости транспортного средства; и
изменение режима эксплуатации транспортного средства с текущего режима эксплуатации на желаемый режим эксплуатации, если скорость транспортного средства больше, чем пороговое значение скорости транспортного средства.
21. Способ по п. 20, отличающийся тем, что пороговое значение скорости транспортного средства равно нулю.
22. Способ эксплуатации транспортного средства, содержащего двигатель, включающий:
определение текущего режима эксплуатации транспортного средства, при этом текущий режим эксплуатации может быть любым из множества режимов эксплуатации, и при этом множество режимов эксплуатации включает, по меньшей мере, первый режим и второй режим, и
определение желаемого режима эксплуатации, при этом желаемый режим эксплуатации может быть любым из множества режимов, включая первый режим и второй режим;
сравнение желаемого режима эксплуатации с текущим режимом эксплуатации транспортного средства; и
изменение режима эксплуатации транспортного средства с текущего режима эксплуатации на желаемый режим эксплуатации, в том случае, если расположение механизма привода дроссельной заслонки выше, чем расположение, соответствующее неактивному положению дроссельной заслонки.
23. Способ по п. 22, дополнительно включающий:
определение первого положения механизма привода дроссельной заслонки перед сравнением желаемого режима эксплуатации с текущим режимом эксплуатации транспортного средства;
определение второго положения механизма привода дроссельной заслонки после сравнения желаемого режима эксплуатации с текущим режимом эксплуатации транспортного средства; и
изменение режима эксплуатации транспортного средства с текущего режима эксплуатации на желаемый режим эксплуатации, если второе положение механизма привода дроссельной заслонки больше, чем первое положение механизма привода дроссельной заслонки.
| US 7702450 B2, 20.04.2010 | |||
| US 5975048 A, 02.11.1999 | |||
| US 5863277 A, 26.01.1999 | |||
| US 6414401 B1, 02.07.2002 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2440258C2 |

