ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к управлению двигателем с меняющимися вязкостями масла и их выявлению.
УРОВЕНЬ ТЕХНИКИ
Вязкость масла оказывает непосредственное воздействие на трение в двигателе, которое, в свою очередь, оказывает влияние на выходной крутящий момент и скорость холостого хода двигателя. Поэтому, трение в двигателе должно оцениваться или предполагаться многими частями стратегии управления двигателем, включающей в себя регулирование скорости холостого хода и электронное управление дросселем. Вязкость масла также оказывает влияние на давление масла, которое, в свою очередь, оказывает влияние на системы, подобные VCT (система регулируемой установки фаз распределительного вала), которые полагаются на давление масла для работы.
Что касается традиционных моторных масел, вязкость значительно изменяется в зависимости от температуры (то есть, низкого индекса вязкости). Разрабатываются новые масла, которые имеют гораздо более высокий индекс вязкости, поэтому, их вязкость изменяется в гораздо меньшей степени с изменением температуры.
Некоторые стратегии управления двигателем включают в себя модификаторы температуры, которые помогают компенсировать изменения вязкости масла. Например, при низкой температуре, и более высокой вязкости, большее открывание дросселя (более интенсивный поток воздуха) используется для достижения требуемой скорости холостого хода или крутящего момента на выходном валу двигателя.
Авторы в материалах настоящего описания выявили, что эти модификаторы температуры могут вызывать нежелательную работу, если двигатель заправлен маслом, имеющим индекс вязкости, который является в значительной мере иным, чем рекомендация производителя. Например, модификаторы температуры, предназначенные для рекомендованного производителем масла с высоким индексом вязкости, не будут сильно изменять открывание дросселя на холостом ходу при низкой температуре. Если двигатель заправлен маслом с низким индексом вязкости, скорость холостого хода на низких температурах будет более низким, чем намечено, и двигатель может останавливаться.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Авторы решили эти проблемы посредством новой стратегии управления, которая выявляет реальные вязкость и/или индекс вязкости масла и управляет двигателем надлежащим образом.
В одном из аспектов предложен способ управления двигателем, включающий в себя этапы, на которых:
определяют после остановки двигателя вязкость моторного масла на основании времени слива масла обратно в поддон картера двигателя и температуры масла при указанном сливе; и
корректируют рабочий параметр двигателя на основании указанной определенной вязкости масла, причем указанный рабочий параметр двигателя содержит положение или угол дросселя по дроссельной заслонке, управляемую контроллером двигателя для регулирования воздуха, засасываемого в двигатель.
В одном из вариантов предложен способ, дополнительно включающий в себя этапы, на которых определяют нормальное время пополнения поддона, когда двигатель является новым, с использованием известной вязкости масла, при этом указанное определение вязкости масла дополнительно включает в себя этап, на котором сравнивают указанное время пополнения поддона после остановки двигателя с указанным временем пополнения поддона для указанного нового двигателя.
В одном из вариантов предложен способ, в котором указанное определение нормального времени пополнения поддона и указанное определение вязкости масла осуществляют в ответ на указанную температуру масла.
В одном из вариантов предложен способ, в котором указанную температуру масла обеспечивают датчиком температуры.
В одном из вариантов предложен способ, в котором указанную температуру масла выводят из одной или более температур двигателя и одного или более условий работы двигателя.
В одном из вариантов предложен способ, в котором указанной дроссельной заслонке дают команду требуемого положения дросселя для обеспечения засасывания требуемого количества воздуха в двигатель, причем указанное требуемое положение дросселя корректируют на основании указанной определенной вязкости масла.
В одном из дополнительных аспектов предложен способ управления двигателем, включающий в себя этапы, на которых:
определяют после остановки двигателя вязкость масла у моторного масла на основании температуры указанного масла и времени слива указанного масла обратно в поддон картера двигателя;
определяют индекс вязкости указанного масла по меньшей мере по двум указанным определяемым вязкостям и температурам масла после по меньшей мере двух указанных остановок двигателя при разных температурах; и
корректируют рабочий параметр двигателя на основании текущей температуры указанного масла и индекса вязкости указанного масла.
В одном из вариантов предложен способ, в котором указанный рабочий параметр двигателя содержит положение или угол дросселя по дроссельной заслонке, управляемую контроллером двигателя для регулирования воздуха, засасываемого в двигатель.
В одном из вариантов предложен способ, в котором указанной дроссельной заслонке дают команду требуемого положения дросселя для обеспечения засасывания требуемого количества воздуха в двигатель, причем указанное требуемое положение дросселя корректируют на основании указанного индекса вязкости и указанной текущей температуры.
В одном из вариантов предложен способ, в котором указанные температуры моторного масла после по меньшей мере двух указанных остановок двигателя отличны друг от друга на пороговую величину.
В одном из вариантов предложен способ, дополнительно включающий в себя этапы, на которых осуществляют криволинейную аппроксимацию указанных определяемых вязкостей моторного масла в зависимости от указанных температур моторного масла.
В одном из вариантов предложен способ, в котором указанный определяемый индекс вязкости выводят из указанной криволинейной аппроксимации.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором определяют, что произошла замена моторного масла, когда одна из указанных определяемых вязкостей моторного масла не соответствует указанной кривой.
В одном из еще дополнительных аспектов предложен способ управления двигателем, включающий в себя этапы, на которых:
определяют после остановки двигателя вязкость масла у моторного масла на основании температуры указанного масла и времени слива указанного масла обратно в поддон картера двигателя;
определяют индекс вязкости указанного масла по меньшей мере по двум указанным определяемым вязкостям масла после по меньшей мере двух указанных остановок двигателя при разных температурах;
регулируют скорость холостого хода двигателя посредством первого определения исходного положения дросселя на основании требуемой скорости холостого хода и предполагаемой вязкости масла; и
корректируют указанное исходное положение дросселя на основании указанного определяемого индекса вязкости и данной температуры масла.
В одном из вариантов предложен способ, дополнительно включающий в себя этапы, на которых увеличивают указанное положение дросселя, когда указанная определенная вязкость указанного масла больше, чем указанная предполагаемая вязкость масла, и уменьшают указанное положение дросселя, когда указанная определенная вязкость указанного масла меньше, чем указанная предполагаемая вязкость масла.
В одном из вариантов предложен способ, в котором указанное время слива указанного масла обратно в указанный поддон основано по меньшей мере частично на датчике уровня масла, указывающем, когда указанное сливаемое масло достигает заданного уровня масла в указанном поддоне.
В одном из вариантов предложен способ, в котором указанные температуры моторного масла после по меньшей мере двух указанных остановок двигателя отличны друг от друга на пороговую величину.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором выполняют криволинейную аппроксимацию указанных определяемых вязкостей моторного масла в зависимости от указанных температур моторного масла.
В одном из вариантов предложен способ, в котором указанный определяемый индекс вязкости выводят из указанной криволинейной аппроксимации.
В одном из аспектов, новый способ управления включает в себя этапы, на которых осуществляют после остановки двигателя, определение вязкости моторного масла на основании времени слива масла обратно в поддон картера двигателя и температуры масла при сливе; и корректируют рабочий параметр двигателя на основании определенной вязкости масла. В конкретном аспекте изобретения, рабочим параметром двигателя является дроссельная заслонка, и дроссельной заслонке дается команда с требуемым углом или положением дросселя для обеспечения засасывания требуемого количества воздуха в двигатель, и требуемый угол дросселя подвергается поправке на основании определенной вязкости масла. Дроссельной заслонке дается команда в исходное положение дросселя для достижения требуемой скорости холостого хода двигателя. В еще одном применении, дроссельной заслонке дается команда в исходное положение для обеспечения требуемого выходного крутящего момента двигателя. Таким образом, технический результат достигается этими действиями.
В еще одном аспекте изобретения, авторы предусмотрели способ, в котором определяют индекс вязкости масла и управляет двигателем надлежащим образом. В частности, способ включает в себя этапы, на которых осуществляют после остановки двигателя, определение вязкости масла у моторного масла на основании температуры масла и времени слива масла обратно в поддон картера двигателя; после по меньшей мере двух остановок двигателя при разных температурах, определение индекса вязкости масла по меньшей мере по двум определяемым вязкостям масла; и корректируют рабочий параметр двигателя на основании текущей температуры масла и индекса вязкости масла. В более конкретном примере, рабочий параметр двигателя содержит положение или угол дросселя по дроссельной заслонке, управляющей количеством воздуха, засасываемого в двигатель. И дроссельной заслонке дают команду требуемого положения дросселя для обеспечения засасывания требуемого количества воздуха в двигатель, и указанное требуемое положение дросселя корректируют на основании указанного индекса вязкости и указанной текущей температуры.
В кроме того еще одном примере, индекс вязкости масла определяют и, в свою очередь, используют для коррекции положения дросселя для регулирования скорости холостого хода. Точнее, способ управления включает в себя этапы, на которых осуществляют после остановки двигателя, определение вязкости масла у моторного масла на основании температуры масла и времени слива масла обратно в поддон картера двигателя; после по меньшей мере двух остановок двигателя при разных температурах, определение индекса вязкости масла по меньшей мере по двум определяемым вязкостям масла; регулирование скорости холостого хода двигателя прежде всего посредством определения исходного положения дросселя на основании требуемой скорости холостого хода и предполагаемой вязкости масла; и коррекцию исходного положения дросселя на основании определяемого индекса вязкости и данной температуры масла. Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего Подробного описания, когда воспринимаются по отдельности или в связи с прилагаемыми чертежами.
Следует понимать, что раскрытие изобретения, приведенное выше, представлено для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Не предполагается идентифицировать ключевые или существенные признаки заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен вариантами осуществления, которые исключают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует примерный привод на ведущие колеса транспортного средства.
Фиг. 2 показывает структурную схему двигателя с турбонаддувом.
Фиг. 3 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода вязкости масла в двигателе по фиг. 2.
Фиг. 4 показывает блок-схему последовательности операций способа, иллюстрирующую еще один способ логического вывода вязкости масла в двигателе по фиг. 2.
Фиг. 5 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода вязкости масла в приводе на ведущие колеса транспортного средства по фиг. 1.
Фиг. 6 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода индекса вязкости масла в двигателе по фиг. 2.
Фиг. 7 показывает примерный график вязкости-температуры масла, сформированный в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 8 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода вязкости масла в двигателе по фиг. 2 на основании времени пополнения поддона.
Фиг. 9 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода индекса вязкости масла в двигателе по фиг. 2 на основании времени пополнения поддона.
Фиг. 10 показывает блок-схему последовательности операций способа, иллюстрирующую способ регулирования скорости холостого хода двигателя по фиг. 2.
Фиг. 11 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода вязкости масла в транспортном средстве с гибридным приводом MHT.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Выходной крутящий момент и скорость холостого хода двигателя находятся под непосредственным влиянием вязкости масла, текущего через двигатель. Соответственно, работа двигателя может управляться более оптимальным образом, если известна вязкость масла. Некоторые типы моторных масел имеют вязкости, которые значительно меняются в зависимости от температуры. В некоторых подходах, работа двигателя модифицируется, чтобы компенсировать эти изменения вязкости. Например, положение дроссельной заслонки, регулирующей воздух, засасываемый в двигатель, может меняться по мере того, как происходят изменения вязкости масла. Однако, такие подходы могут не быть приспособлены для значительных изменений индекса вязкости, например, обусловленных заменами моторного масла. По существу, может происходить субоптимальная работа двигателя, например, давая в результате остановки двигателя.
Предусмотрены различные способы логического вывода вязкости масла и/или индекса вязкости масла в двигателе внутреннего сгорания. В одном из примеров, новый способ управления содержит: после остановки двигателя, определение вязкости моторного масла на основании времени слива масла обратно в поддон картера двигателя и температуры масла при сливе; и внесение поправки в рабочий параметр двигателя на основании определенной вязкости масла. Фиг. 1 иллюстрирует примерный привод на ведущие колеса транспортного средства. Фиг. 2 показывает структурную схему двигателя с турбонаддувом. Фиг. 3 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода вязкости масла в двигателе по фиг. 2. Фиг. 4 показывает блок-схему последовательности операций способа, иллюстрирующую еще один способ логического вывода вязкости масла в двигателе по фиг. 2. Фиг. 5 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода вязкости масла в приводе на ведущие колеса транспортного средства по фиг. 1. Фиг. 6 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода индекса вязкости масла в двигателе по фиг. 2. Фиг. 7 показывает примерный график вязкости-температуры масла, сформированный в соответствии с вариантом осуществления настоящего изобретения. Фиг. 8 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода вязкости масла в двигателе по фиг. 2 на основании времени пополнения поддона. Фиг. 9 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода индекса вязкости масла в двигателе по фиг. 2 на основании времени пополнения поддона. Фиг. 10 показывает блок-схему последовательности операций способа, иллюстрирующую способ регулирования скорости холостого хода двигателя по фиг. 2. Фиг. 11 показывает блок-схему последовательности операций способа, иллюстрирующую способ логического вывода вязкости масла в транспортном средстве с гибридным приводом MHT. Двигатель по фиг. 2 также включает в себя контроллер, выполненный с возможностью выполнять способы, изображенные на фиг. 3-6 и 8-10.
Фиг. 1 - структурная схема привода 1 на ведущие колеса транспортного средства и транспортного средства 2. Привод 1 на ведущие колеса может быть механизирован двигателем 10. Двигатель 10 может запускаться посредством DISG 3, встроенного в привод на ведущие колеса стартера/генератора, который, в этом конкретном примере, является типом транспортного средства с гибридным приводом. Кроме того, двигатель 10 может вырабатывать или регулировать крутящий момент посредством исполнительного механизма 4 крутящего момента, такого как одно или более из топливной форсунки, дросселя, распределительного вала, подъема клапанов, и т.д.
Крутящий момент на выходе двигателя может передаваться на входную сторону маховика 5 двойной массы. Скорость вращения двигателя, а также положение и скорость вращения входной стороны маховика двойной массы могут определяться посредством датчика 6, такого как датчик 118 положения двигателя, подробнее описанного ниже со ссылкой на фиг. 2. Маховик 5 двойной массы может включать в себя пружины и отдельные массы (не показаны) для демпфирования возмущений крутящего момента привода на ведущие колеса. Выходная сторона маховика 5 двойной массы показана являющейся механически присоединенной к входной стороне муфты 7 расцепления. Муфта 7 расцепления может быть с электрическим или гидравлическим приводом и может использоваться для проворачивания коленчатого вала двигателя 10 во время горячих перезапусков, а в некоторых примерах, также при теплых перезапусках. Датчик 8 положения расположен на стороне муфты расцепления маховика 5 двойной массы для считывания выходного положения и скорости вращения маховика 5 двойной массы. Расположенная ниже по потоку сторона муфты 7 расцепления показана механически присоединенной к входному валу 9 DISG.
DISG 3 может приводиться в действие, чтобы выдавать крутящий момент на привод 1 на ведущие колеса или преобразовывать крутящий момент привода на ведущие колеса в электрическую энергию, которая должна накапливаться в устройстве 11 накопления энергии. DISG 3 может иметь более высокую несущую способность по крутящему моменту на выходном валу, чем электродвигатель 41, показанный на фиг. 2. Кроме того, DISG 3 непосредственно приводит в движение привод 1 на ведущие колеса или непосредственно приводится в движение приводом 1 на ведущие колеса. Нет никаких ремней, шестерен или цепей для присоединения DISG 3 к приводу 1 на ведущие колеса. Скорее, DISG 3 вращается на той же самой частоте, что и привод 1 на ведущие колеса. Устройство 11 накопления электрической энергии может быть аккумуляторной батареей, конденсатором или катушкой индуктивности. Расположенная ниже по потоку сторона DISG 3 механически присоединена к насосному колесу 13 гидротрансформатора 14 через вал 15. Расположенная выше по потоку сторона DISG 3 механически присоединена к муфте 7 расцепления. Гидротрансформатор 14 включает в себя турбину 16 для вывода крутящего момента на входной вал 17 трансмиссии. Входной вал 17 трансмиссии механически присоединяет гидротрансформатор 14 к автоматической трансмиссии 18. Гидротрансформатор 14 также включает в себя обходную блокировочную муфту 19 гидротрансформатора (TCC). Крутящий момент непосредственно передается с насосного колеса 13 на турбину 16, когда TCC блокирована. TCC электрически приводится в действие контроллером 12. В качестве альтернативы, TCC может блокироваться гидравлически. В одном из примеров, гидротрансформатор может указываться ссылкой как компонент трансмиссии. Скорость вращения и положение турбины гидротрансформатора могут определяться посредством датчика 20 положения. В некоторых примерах, 25 и/или 20 могут быть датчиками крутящего момента или могут быть комбинированными датчиками положения и крутящего момента.
Когда блокировочная муфта 19 гидротрансформатора полностью расцеплена, гидротрансформатор 14 передает крутящий момент двигателя на автоматическую трансмиссию 18 посредством переноса текучей среды между турбиной 16 гидротрансформатора и насосным колесом 13 гидротрансформатора, тем самым, давая возможность умножения крутящего момента. В противоположность, когда муфта 19 блокировки гидротрансформатора полностью зацеплена, крутящий момент на выходе двигателя передается непосредственно через муфту гидротрансформатора на входной вал 17 трансмиссии 18. В качестве альтернативы, блокировочная муфта 19 гидротрансформатора может зацепляться частично, тем самым, давая возможность регулироваться величине крутящего момента, передаваемого непосредственно на трансмиссию. Контроллер 12 может быть выполнен с возможностью регулировать величину крутящего момента, передаваемого гидротрансформатором 19, посредством регулировки блокировочной муфты гидротрансформатора в ответ на различные условия работы двигателя или на основании основанного на водителе запроса режима работы двигателя.
Автоматическая трансмиссия 18 включает в себя муфты 28 передач (например, передачи 1-N, где N - целое число между 2-25) и муфту 29 переднего хода. Муфты 28 передач и муфта 29 переднего хода могут избирательно вводиться в зацепление для продвижения транспортного средства. Крутящий момент на выходе из автоматической трансмиссии 18, в свою очередь, может передаваться на колеса 31, чтобы приводить транспортное средство в движение, через выходной вал 32. Более точно, автоматическая трансмиссия 18 может передавать входной вращающий момент на входном валу 17 в ответ на состояние перемещения транспортного средства перед передачей выходного вращающего момента на колеса 31.
Кроме того, сила трения может прикладываться к колесам 31 посредством приведения в действие колесных тормозов 33. В одном из примеров, колесные тормоза 33 могут приводиться в действие в ответ на нажимание водителем его ступней на тормозную педаль (не показана). В других примерах, контроллер 12 или контроллер, связанный с контроллером 12, может включать колесные тормоза 33. Таким же образом, сила трения может снижаться в отношении колес 31 посредством отведения колесных тормозов 33 в ответ на отпускание водителем своей ступни с тормозной педали. Кроме того, тормоза транспортного средства могут прикладывать силу трения к колесам 31 посредством контроллера 12 в качестве части процедуры автоматического останова.
Механический масляный насос 34 может находиться в сообщении по текучей среде с автоматической трансмиссией 18, чтобы выдавать гидравлическое давление для приведения в действие различных муфт, таких как муфта 29 переднего хода, муфта 28 передач и/или блокировочная муфта 19 гидротрансформатора. Механический масляный насос 34, например, может приводиться в действие в соответствии с гидротрансформатором 14, и может приводиться в движение вращением входного вала двигателя или DISG через входной вал 15. Таким образом, гидравлическое давление, вырабатываемое в механическом масляном насосе 34, может повышаться по мере того, как увеличиваются скорость вращения двигателя и/или скорость вращения DISG, и может снижаться по мере того, как уменьшается скорость вращения двигателя и/или скорость вращения DISG.
Контроллер 12 может быть выполнен с возможностью принимать входные сигналы с двигателя 10, как подробнее показано на фиг. 2, и соответствующим образом управлять выходным крутящим моментом двигателя и/или работой гидротрансформатора, трансмиссии, DISG, муфт и/или тормозов. В качестве одного из примеров, крутящий момент на выходном валу двигателя может управляться посредством регулировки комбинации установки момента зажигания, длительности импульса топлива, установки момента импульса топлива и/или заряда воздуха посредством управления открыванием дросселя и/или установкой фаз клапанного распределения, подъемом клапана и давлением наддува для двигателей с нагнетателем и турбонагнетателем. В случае дизельного двигателя, контроллер 12 может управлять крутящим моментом на выходном валу двигателя, управляя комбинацией длительности импульса, установки момента импульса топлива и заряда воздуха. Во всех случаях, управление двигателем может выполняться на основе цилиндр за цилиндром, чтобы регулировать крутящий момент на выходном валу двигателя. Контроллер 12 также может управлять выходным крутящим моментом и выработкой электрической энергии из DISG посредством регулировки тока, втекающего в и из обмоток возбуждения и/или обмоток якоря DISG, как известно в данной области техники.
Когда условия выключения холостого хода удовлетворены, контроллер 12 может инициировать остановку двигателя посредством отключения топлива и зажигания у двигателя. Однако, двигатель может продолжать вращаться в некоторых примерах. Кроме того, для поддержания величины кручения в трансмиссии, контроллер 12 может заземлять вращающиеся элементы трансмиссии 18 в картер 35 трансмиссии и тем самым, на раму транспортного средства. В частности, контроллер 12 может вводить в зацепление одну или более муфт трансмиссии, таких как муфта 29 переднего хода, и блокировать зацепленную муфту(ы) трансмиссии относительно картера 35 трансмиссии и транспортного средства. Давление муфт трансмиссии может меняться (например, повышаться), чтобы регулировать состояние зацепления муфты трансмиссии и выдавать требуемую величину кручения трансмиссии. Когда удовлетворены условия запуска, и/или водитель транспортного средства желает пустить в ход транспортное средство, контроллер 12 может повторно активировать двигатель, возобновляя сгорание в цилиндрах.
Давление колесных тормозов также может регулироваться во время отключения двигателя на основании давления муфты трансмиссии, чтобы содействовать удерживания трансмиссии наряду с уменьшением крутящего момента, передаваемого через колеса. Более точно, посредством применения колесных тормозов 33 наряду с блокировкой одной или более зацепленных муфт трансмиссии, противодействующие силы могут прикладываться к трансмиссии и, следовательно, к приводу на ведущие колеса, тем самым, сохраняя промежуточную передачу в активном зацеплении, и потенциальную энергию кручения в зубчатой передаче трансмиссии, не двигая колеса. В одном из примеров, давление колесных тормозов может регулироваться, чтобы координировать применение колесных тормозов с блокировкой зацепленной муфты трансмиссии во время остановки двигателя. По существу, посредством регулировки давления колесных тормозов и давления муфты, может регулироваться величина кручения, удерживаемая в трансмиссии, когда двигатель остановлен.
Фиг. 2 - схематичное изображение, показывающая примерный вариант осуществления двигателя 10, который может быть включен в силовую установку автомобиля, включающую в себя, но не в качестве ограничения, привод 1 на ведущие колеса транспортного средства, показанный на фиг. 1. Двигатель 10 показан с четырьмя цилиндрами 30. Однако, другие количества цилиндров могут использоваться в соответствии с данным изобретением. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. Каждая камера 30 сгорания (например, цилиндр) двигателя 10 может включать в себя стенки камеры сгорания с поршнем (не показан), расположенными в них. Поршни могут быть присоединены к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии (не показана). Кроме того, электродвигатель 41 (например, стартер) показан в качестве являющегося присоединенным к коленчатому валу 40 через маховик 43, чтобы давать возможность операции запуска двигателя 10. Электрическая мощность может выдаваться в электродвигатель 41 через аккумуляторную батарею 45 транспортного средства. Аккумуляторная батарея 45 транспортного средства может давать возможность проворачивания коленчатого вала двигателя 10, а также других операций, в том числе, искрового зажигания и освещения транспортного средства, и может иметь различные пригодные типы, в том числе, но не в качестве ограничения, 12-вольтной свинцово-кислотной аккумуляторной батареи. Аккумуляторная батарея 45 транспортного средства может обеспечивать (например, с отклонением менее чем в 5%) постоянный источник электрической мощности для электродвигателя 41 и других компонентов, в зависимости от ее состояния заряда (SOC).
Камеры 30 сгорания могут принимать всасываемый воздух из впускного коллектора 44 через впускной канал 42 и могут выпускать выхлопные газы через выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 46 могут избирательно сообщаться с камерой 30 сгорания через соответствующие впускные клапаны и выпускные клапаны (не показаны). В некоторых вариантах осуществления, камера 30 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
Топливные форсунки 50 показаны присоединенными непосредственно к камере 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала FPW, принятого из контроллера 12. Таким образом, топливная форсунка 50 обеспечивает то, что известно в качестве непосредственного впрыска топлива в камеру 30 сгорания. Топливная форсунка, например, может быть установлена сбоку камеры сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 50 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива. В некоторых вариантах осуществления, камеры 30 сгорания, в качестве альтернативы или дополнительно, могут включать в себя топливную форсунку, расположенную во впускном коллекторе 44, в конфигурации, которая предусматривает то, что известно как оконный впрыск топлива во впускное окно выше по потоку от каждой камеры 30 сгорания.
Впускной канал 42 может включать в себя дроссель 21 и 23, имеющий дроссельные заслонки 22 и 24, соответственно. В этом конкретном примере, положение дроссельных заслонок 22 и 24 может регулироваться контроллером 12 посредством сигналов, выдаваемых на привод, включенный в состав дросселями 21 и 23. В одном из примеров, приводы могут быть электроприводами (например, электродвигателями), конфигурацией, которая обычно указывается ссылкой как электронный регулятор дросселя (ETC). Таким образом, заслонки 21 и 23 могут приводиться в действие для варьирования всасываемого воздуха, подаваемого в камеру 30 сгорания, между другими цилиндрами двигателя. Примерный способ управления положением дросселя описан ниже со ссылкой на фиг. 10. Положение дроссельных заслонок 22 и 24 может выдаваться в контроллер 12 сигналом TP положения дросселя. Впускной канал 42 дополнительно может включать в себя датчик 120 массового расхода воздуха, датчик 122 давления воздуха в коллекторе и датчик давления на входе дросселя для выдачи соответствующих сигналов MAF (массового расхода воздуха), MAP (давления воздуха в коллекторе) в контроллер 12.
Выпускной канал 48 может принимать выхлопные газы из цилиндров 30. Датчик 128 выхлопных газов показан присоединенным к выпускному каналу 48 выше по потоку от турбины 62 и устройства 78 снижения токсичности выхлопных газов. Датчик 128 может быть выбран из числа различных пригодных датчиков для выдачи показания топливно-воздушного соотношения в выхлопных газах, например, таких как линейный кислородный датчик или UEGO (универсальный или широкодиапазонный датчик кислорода в выхлопных газах), двухрежимный кислородный датчик или EGO, датчик NOx, HC, или CO. Устройство 78 снижения токсичности выхлопных газов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности выхлопных газов или их комбинациями.
Температура выхлопных газов может измеряться одним или более датчиков температуры (не показаны), расположенных в выпускном канале 48. В качестве альтернативы, температура выхлопных газов может выводиться на основании условий работы двигателя, таких как скорость вращения, нагрузка, топливно-воздушное соотношение (AFR), запаздывание искрового зажигания, и т.д.
Контроллер 12 показан на фиг. 2 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы постоянного запоминающего устройства 106 в этом конкретном примере, оперативное запоминающее устройство 108, энергонезависимую память 110 и шину данных. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение всасываемого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру хладагента двигателя (ECT) с датчика 112 температуры, схематично показанного в одном месте в пределах двигателя 10; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика положения дросселя, как обсуждено; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122, как обсуждено. Сигнал скорости вращения двигателя, RPM, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе 44. Отметим, что могут использоваться различные комбинации вышеприведенных датчиков, такие как датчик MAF без датчика MAP, или наоборот. Во время стехиометрической работы, датчик MAP может давать показание крутящего момента двигателя. Кроме того, этот датчик, наряду с выявленной скоростью вращения двигателя, может давать оценку заряда (включающего в себя воздух), введенного в цилиндр. В одном из примеров, датчик 118, который также используется в качестве датчика скорости вращения двигателя, может вырабатывать заданное количество равноразнесенных импульсов каждый оборот коленчатого вала 40. В некоторых примерах, постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машиночитаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены.
Двигатель 10 дополнительно может включать в себя компрессионное устройство, такое как турбонагнетатель или нагнетатель, включающий в себя по меньшей мере компрессор 60, расположенный вдоль впускного коллектора 44. Что касается турбонагнетателя, компрессор 60 может по меньшей мере частично приводиться в действие турбиной 62, например, через вал или другое соединительное устройство. Турбина 62 может быть расположена вдоль выпускного канала 48 и сообщаться с выхлопными газами, текущими через него. Различные компоновки могут быть предусмотрены для осуществления привода компрессора. Что касается нагнетателя, компрессор 60 может по меньшей мере частично приводиться в движение двигателем и/или электрической машиной и может не включать в себя турбину. Таким образом, величина сжатия, обеспечиваемого для одного или более цилиндров двигателя посредством турбонагнетателя или нагнетателя, может регулироваться контроллером 12. В некоторых случаях, турбина 62, например, может приводить в движение электрогенератор 64 для выдачи энергии в аккумуляторную батарею 66 через приводной механизм 68 турбонагнетателя. Энергия из аккумуляторной батареи 66 затем может использоваться для приведения в движение компрессора 60 посредством электродвигателя 70. Кроме того, датчик 123 может быть расположен во впускном коллекторе 44 для выдачи сигнала BOOST (НАДДУВ) в контроллер 12.
Кроме того, выпускной канал 48 может включать в себя перепускную заслонку 26 для выхлопных газов для отвода выхлопных газов от турбины 62. В некоторых вариантах осуществления, перепускная заслонка 26 для выхлопных газов может быть многоступенной перепускной заслонкой для выхлопных газов, таким как двухступенная перепускная заслонка для выхлопных газов с первой ступенью, выполненной с возможностью регулировать давление наддува, и второй ступенью, выполненной с возможностью увеличивать тепловой поток в устройство 78 снижения токсичности выхлопных газов. Перепускная заслонка 26 для выхлопных газов может приводиться в действие посредством привода 150, который может быть электрическим приводом или пневматическим приводом. Впускной канал 42 может включать в себя перепускной клапан 27 компрессора, выполненный с возможностью отводить всасываемый воздух вокруг компрессора 60. Перепускная заслонка 26 для выхлопных газов и/или перепускной клапан 27 компрессора могут управляться контроллером 12 через исполнительные механизмы (например, привод 150), например, чтобы открываться, когда требуется более низкое давление наддува.
Впускной канал 42 может дополнительно включать в себя охладитель 80 наддувочного воздуха (CAC) (например, промежуточный охладитель) для понижения температуры нагнетаемых турбонагнетателем или нагнетателем всасываемых газов. В некоторых вариантах осуществления, охладитель 80 наддувочного воздуха может быть воздушно-воздушным теплообменником. В других вариантах осуществления охладитель 80 наддувочного воздуха может быть воздушно-жидкостным теплообменником.
Кроме того, в раскрытых вариантах осуществления, система рециркуляции выхлопных газов (EGR) может направлять требуемую порцию выхлопных газов из выпускного канала 48 во впускной канал 42 через канал 140 EGR. Величина EGR, выдаваемой во впускной канал 42, может регулироваться контроллером 12 посредством клапана 142 EGR. Кроме того, датчик EGR (не показан) может быть расположен внутри канала EGR и может выдавать показание одного или более из давления, температуры, концентрации выхлопных газов. В качестве альтернативы, EGR может управляться посредством расчетного значения, основанного на сигналах с датчика MAF (выше по потоку), MAP (впускного коллектора), MAT (температуры газа в коллекторе) и датчика скорости вращения коленчатого вала. Кроме того, EGR может управляться на основании датчика O2 выхлопных газов и/или кислородного датчика на впуске (впускного коллектора). В некоторых условиях, система EGR может использоваться для регулирования температуры смеси воздуха и топлива в пределах камеры сгорания. Фиг. 2 показывает систему EGR высокого давления, где EGR направляется из выше по потоку от турбины турбонагнетателя в ниже по потоку от компрессора турбонагнетателя. В других вариантах осуществления, двигатель, дополнительно или в качестве альтернативы, может включать в себя систему EGR низкого давления, где EGR направляется из ниже по потоку от турбины турбонагнетателя в выше по потоку от компрессора турбонагнетателя.
Фиг. 2 также схематично иллюстрирует поток масла через двигатель 10 для уменьшения износа компонентов двигателя и содействия рассеянию тепла, происходящего от трения. В этом примере, масло накачивается из масляного поддона 160 масляным насосом 162 для смазки множества движущихся частей в двигателе 10, таких как коленчатый вал 40 и его шатуны, а также подшипники в шатунах и пальцы поршней, расположенных в цилиндрах 30. Масло также может использоваться для смазки между кольцами поршней и цилиндров 30. Толщина и трение этой масляной пленки являются зависящими от температуры и свойств масла, таких как вязкость масла. После достижения движущихся частей двигателя 10, масло оттекает обратно в поддон 160 через множество дренажных магистралей 164. Масло может циркулировать на всем протяжении двигателя через множество каналов (не показаны).
Масляный поддон 160 включает в себя датчик 166 уровня масла, выполненный с возможностью выводить указания уровня масла в масляном поддоне в контроллер 12. Выходной сигнал с датчика 166 уровня масла может отслеживаться по времени и использоваться для контроля скорости, с которой масло оттекает из двигателя 10 в масляный поддон 160 вслед за глушением двигателя. Скорости оттока масла, полученные таким образом, могут использоваться для оценки вязкости масла в двигателе 10, как подробнее описано ниже.
Далее, с обращением к фиг. 3, показана блок-схема последовательности операций способа, иллюстрирующая примерный способ 300 для логического вывода вязкости масла в двигателе внутреннего сгорания. Способ 300, например, может храниться в качестве машиночитаемых команд в ПЗУ 106 контроллера 12 на фиг. 2. Хотя способ 300 описан со ссылкой на двигатель 10 по фиг. 2, будет понятно, что способ 300 может выполняться для других двигателей внутреннего сгорания.
На этапе 302 способа 300, определяется, был ли двигатель недействующим в течение по меньшей мере пороговой продолжительности времени. Двигатель может считаться недействующим на всем протяжении продолжительности времени, при которой он не работает - например, не сжигает топливо и не вращается. Вращение двигателя, например, может оцениваться посредством контроля сигнала PIP, вырабатываемым датчиком на эффекте Холла (например, датчиком 118 на фиг. 2). Пороговая продолжительность времени может выбираться, чтобы соответствовать продолжительности времени, спустя которую температура двигателя существенно снижается (например, до в пределах 10°C от температуры окружающей среды) вслед за отключением по предыдущему циклу. Таким образом, идентификация изменений скорости вращения, на котором двигатель подвергается проворачиванию коленчатого вала вслед за пороговой продолжительностью времени, может предоставлять возможность устранения неоднозначности многочисленных воздействий, которые могут вызывать такие изменения. Изменения скорости проворачивания коленчатого вала, в особенности обусловленные изменениями вязкости масла, могут идентифицироваться особо. Если определено, что двигатель не оставался недействующим в течение по меньшей мере пороговой продолжительности времени (Нет), способ заканчивается. Если определено, что двигатель оставался недействующим в течение по меньшей мере пороговой продолжительности времени (Да), способ переходит на этап 304.
На этапе 304 способа, определяется, находится ли температура окружающей среды в пределах заданного диапазона температур. Как с пороговой продолжительностью времени описанной выше, изменения скорости проворачивания коленчатого вала двигателя, в особенности обусловленные изменениями вязкости масла, могут идентифицироваться, гарантируя, что чересчур высокие или низкие температуры окружающей среды не оказывают значительного влияния на вязкость масла. Заданный диапазон температур, например, может продолжаться от 20°C до 25°C. Температура окружающей среды может измеряться непосредственно датчиком температуры окружающей среды, например, расположенным ближайшим к передней зоне транспортного средства, или опосредованно, посредством логического вывода температуры окружающей среды на основании измерений с одного или более других датчиков температуры (например, датчика 112 на фиг. 2). Если определено, что температура окружающей среды не находится в пределах заданного диапазона температур (Нет), способ заканчиваться. Если определено, что температура окружающей среды находится в пределах заданного диапазона температур (Да), способ переходит на этап 306.
На этапе 306 способа, определяется, превышает ли состояние заряда (SOC) аккумуляторной батареи (например, аккумуляторной батареи 45 по фиг. 2) пороговое значение SOC. Как с пороговой продолжительность времени и диапазоном температур окружающей среды, описанными выше, изменения скорости проворачивания коленчатого вала двигателя, в особенности обусловленные изменениями вязкости масла, могут идентифицироваться, гарантируя, что низкие заряды аккумуляторной батареи не оказывают значительного влияния на скорость проворачивания коленчатого вала. Текущее SOC может выводиться на основании напряжения аккумуляторной батареи, предыстории тока, текущего в и из аккумуляторной батареи, и т.д. Пороговое значение SOC может выбираться на основании конкретной используемой аккумуляторной батареи и устанавливаться в пороговое значение состояния заряда, ниже которого скорость проворачивания коленчатого вала подвергается значительному влиянию. В качестве неограничивающего примера, пороговым значением SOC могут быть 70% максимального заряда (например, 100%). Если определено, что SOC аккумуляторной батареи не превышает пороговое значение SOC (Нет), способ заканчивается. Если определено, что SOC аккумуляторной батареи превышает пороговое значение SOC (Да), способ переходит на этап 308.
На этапе 308, определяется, была ли информация о новой вязкости масла подана в систему управления двигателя, например, водителем транспортного средства или техническим специалистом сервисной службы. Новая вязкость масла может подаваться в контроллер двигателя, выполняющий способ 300, такой как контроллер 12 по фиг. 2, и сохраняться на запоминающем носителе контроллера двигателя (например, в ПЗУ 106). В некоторых сценариях, новая вязкость масла может подаваться в условиях производства перед или одновременно с начальным вводом в действие (например, зажиганием) двигателя. Двигатель может заправляться маслом. В других сценариях, новая вязкость масла может подаваться по замене масла. Масла для замены (или новые) могут иметь рекомендованную производителем вязкость, пригодную для двигателя, или могут иметь другие известные вязкости. Новые вязкости масла могут подаваться в блок управления двигателем различными пригодными способами - например, через инструмент для технического обслуживания и ремонта, присоединенный к порту бортовой диагностики (OBD), посредством находящегося в транспортном средстве сенсорного экрана или другого информационного экрана для водителя, или посредством заданной последовательности или комбинации событий включения/выключения зажигания и/или переключений. Новая вязкость может подаваться в блок управления двигателем по локальной сети контроллеров (CAN), а в некоторых вариантах осуществления, посредством беспроводной линии связи. Например, масляные канистры или этикетки, имеющие машиночитаемый код (например, 1D (одномерный) или 2D (двухмерный) штрих-код), указывающий вязкость масла, хранимого в них, может интерпретироваться и отправляться в контроллер двигателя по беспроводной линии связи. Если новая вязкость масла была подана (Да), способ переходит на этап 310. Если новая вязкость масла не была подана (Нет), способ переходит на этап 318.
На этапе 310 способа, определяется опорная скорость проворачивания коленчатого вала, которое определяет скорость вращения, при котором двигатель подвергается проворачиванию коленчатого вала во время режима запуска. В этом режиме запуска, переменные, такие как действие двигателя, температура окружающей среды и SOC аккумуляторной батареи находятся в приемлемых пределах и не оказывают неблагоприятного влияния и не искажают скорость проворачивания коленчатого вала иным образом. В проиллюстрированном варианте осуществления, опорная скорость проворачивания коленчатого вала определяется посредством проворачивания коленчатого вала двигателя стартерным электродвигателем (например, электродвигателем 41 по фиг. 2) на этапе 312 и ассоциативного связывания результирующего скорости проворачивания коленчатого вала с подаваемой вязкостью масла на этапе 314. Как описано выше, скорость проворачивания коленчатого вала может определяться посредством сигналов PIP, выдаваемых датчиком на эффекте Холла или другим типом датчика (например, датчиком 118 по фиг. 2). В некоторых вариантах осуществления, скорость проворачивания коленчатого вала в этом режиме запуска может не быть связанным с подаваемой вязкостью масла до тех пор, пока не превышена пороговая продолжительность времени, в течение которой двигатель подвергается проворачиванию коленчатого вала. Дополнительно или в качестве альтернативы, скорость проворачивания коленчатого вала может не связываться с подаваемой вязкостью масла до тех пор пока ускорение проворачивания коленчатого вала не падает ниже порогового ускорения. Такие подходы могут подавлять неточные определения опорной скорости проворачивания коленчатого вала, обусловленные переходными изменениями скорости проворачивания коленчатого вала. В некоторых примерах (например, в условиях сборки или технического обслуживания и ремонта), определение опорной скорости проворачивания коленчатого вала может происходить, когда двигатель наполняется маслом, имеющим рекомендованную производителем вязкость масла или другую известную вязкость масла. В этом примере, двигатель может быть новым.
Затем, на этапе 316, определенная скорость проворачивания коленчатого вала и связанная вязкость масла сохраняются на пригодном запоминающем носителе. Определенные скорости проворачивания коленчатого вала и связанные вязкости, например, могут сохраняться в ПЗУ 106 контроллера 12 на фиг. 2 и могут храниться посредством различных пригодных структур данных, таких как опорные таблицы, выполненных с возможностью выводить вязкость масла для данной скорости проворачивания коленчатого вала. Следует принимать во внимание, что, в некоторых вариантах осуществления, однако, новая вязкость масла, подобная (например, в пределах 5%) ее предыдущей вязкости масла, может не вызывать определение опорной скорости проворачивания коленчатого вала. Вслед за 316, способ заканчивается.
На этапе 318 способа, если новая вязкость масла не была подана, вязкость масла выводится и вывод вязкости масла включает в себя, на этапе 320, извлечение опорной скорости проворачивания коленчатого вала, определяемого ранее или поданного иным образом. Извлечение опорной скорости проворачивания коленчатого вала может включать в себя осуществление доступа в пригодную структуру данных (например, опорную таблицу), в которой хранится опорная скорость проворачивания коленчатого вала, и может включать в себя извлечение вязкости масла, связанной со опорной скоростью проворачивания коленчатого вала. Следует принимать во внимание, что множество опорных скоростей проворачивания коленчатого вала и связанных вязкостей масла могут храниться в такой структуре данных. Различные критерии могут использоваться для выбора конкретного опорной скорости проворачивания коленчатого вала. Затем, на этапе 322, двигатель подвергается проворачиванию коленчатого вала стартерным электродвигателем. на этапе 324, текущая скорость проворачивания коленчатого вала в течение этого периода проворачивания коленчатого вала двигателя определяется посредством способов, описанных выше (например, посредством измерения сигналов PIP, вырабатываемых датчиком 118 на фиг. 2). Затем, на этапе 326, определяется разность между текущей скоростью проворачивания коленчатого вала и определяемым или поданным опорной скоростью проворачивания коленчатого вала. Эта разность затем может использоваться для логического вывода вязкости масла - например, если текущая скорость проворачивания коленчатого вала является значительно меньшим, чем опорная скорость проворачивания коленчатого вала, может делаться вывод, что вязкость масла повысилась относительно предыдущей вязкости. Такие изменения вязкости масла могут количественно определяться не только посредством сравнения разности между текущим и опорным числами оборотов проворачивания коленчатого вала, но также вязкости масла, связанной с опорной скоростью проворачивания коленчатого вала. В одном из подходов, например, разность между текущим и опорным числами оборотов проворачивания коленчатого вала может умножаться на вязкость масла, связанную с опорной скоростью проворачивания коленчатого вала, для определения новой вязкости масла.
Затем, на этапе 328 способа, один или более рабочих параметров подвергаются поправке на основании вязкости масла, выведенной на этапе 318. Среди других регулировок, такое внесение поправки может включать в себя корректировку, на этапе 330, положения дросселя у дроссельной заслонки, управляющей количеством воздуха, засасываемого в двигатель - например, дроссельной заслонки 22 дросселя 21 на фиг. 2. Например, положение дросселя у дроссельной заслонки может увеличиваться, чтобы дополнительно открывать дроссель, по определению, что вязкость масла повысилась. Выяснение вязкости масла может предоставлять двигателю возможность поддерживать правильная скорость холостого хода после значительного изменения вязкости вслед за заменой масла, а также подавать правильный выходной крутящий момент и установки фаз клапанного распределения. Последующие регулировки дросселя, в таком случае, могут помещать дроссельную заслонку в командное положение на основании различных параметров, в том числе, но не в качестве ограничения, требуемой скорости холостого хода двигателя, температуры масла и выведенной вязкости масла.
Поправки для одного или более рабочих параметров, основанные на вязкостях масла, выведенных посредством способа 300, могут давать в результате повышенную экономию топлива, повышенные ездовые качества и пониженную частоту остановок. Точность логического вывода вязкостей масла посредством скоростей проворачивания коленчатого вала также может повышаться, так как может устраняться неоднозначность множества факторов, которые могут оказывать влияние на скорость проворачивания коленчатого вала.
Следует принимать во внимание, что способ 300 может быть скорректирован различными способами. Например, дополнительный блок принятия решений может определять, было ли выявлено изменение скорости проворачивания коленчатого вала выше первого порогового значения, но ниже второго порогового значения. Изменения скорости проворачивания коленчатого вала ниже первого порогового значения могут считаться незначительными и игнорироваться или усредняться, наряду с тем, что большие изменения могут использоваться для указания, что произошла замена масла. Вязкость масла затем может выводиться посредством способов, описанных выше. В качестве альтернативы или дополнительно, предупреждение может отправляться водителю транспортного средства (например, посредством индикаторов приборной панели или устройства отображения), указывающее выявление смены масла и, по выбору, запрашивающее информацию о новом масле.
Далее, с обращением к фиг. 4, показана блок-схема последовательности операций способа, иллюстрирующая примерный способ 400 для логического вывода вязкости масла. Способ 400, например, может храниться в качестве машиночитаемых команд в ПЗУ 106 контроллера 12 на фиг. 2. Хотя способ 400 описан со ссылкой на двигатель 10 по фиг. 2, будет понятно, что способ 400 может выполняться для других двигателей внутреннего сгорания.
На этапе 402 способа 400, определяется, был ли двигатель недействующим в течение по меньшей мере пороговой продолжительности времени. Как описано выше, вращение двигателя и, таким образом, его действие может оцениваться посредством контроля сигнала PIP, вырабатываемого датчиком на эффекте Холла или другим типом датчика (например, датчиком 118 на фиг. 2). Пороговая продолжительность времени может содействовать устранению неоднозначности множества факторов, которые оказывают влияние на скорость проворачивания коленчатого вала во время запуска двигателя, и, таким образом, идентификации изменений скорости проворачивания коленчатого вала, обусловленных изменениями вязкости масла. Если определено, что двигатель не оставался недействующим в течение по меньшей мере пороговой продолжительности времени (Нет), способ переходит на этап 404. Если определено, что двигатель оставался недействующим в течение по меньшей мере пороговой продолжительности времени (Да), способ переходит на этап 410.
На этапе 404 способа, определяется температура масла. Здесь, учитываются изменения вязкости масла, вызванные высокими или низкими температурами масла. Определение температуры масла может включать в себя непосредственное измерение температуры 406 масла, если будет иметься в распоряжении выходной сигнал с датчика, выполненного с возможностью измерять температуру масла. Такой датчик, например, может быть расположен вдоль множества дренажных магистралей 164 или в поддоне 160 на фиг. 2. Наоборот, температура масла может выводиться на этапе 408 на основании множества параметров, в том числе, температуры двигателя при непосредственно предшествующем выключении, времени замачивания двигателя после остановки и текущей температуры окружающей среды, которые могут определяться, как описано выше. Температура масла дополнительно может выводиться из одной или более температур, измеренных где-нибудь еще в двигателе, таких как температура металла головки блока цилиндров.
На этапе 410 способа, если двигатель оставался недействующим в течение по меньшей мере пороговой продолжительности времени, температура масла выводится в качестве являющейся температурой окружающей среды.
Затем, на этапе 412 способа, выводится вязкость масла. И вывод вязкости масла включает в себя извлечение опорной скорости проворачивания коленчатого вала на этапе 414. Как описано выше, одно или более опорных скоростей проворачивания коленчатого вала могут храниться в пригодной структуре данных (например, справочной таблице) и подвергаться доступу для данного входного сигнала. В некоторых вариантах осуществления, опорная скорость проворачивания коленчатого вала может подвергаться доступу посредством подачи вязкости масла в качестве входных данных. В качестве альтернативы или дополнительно, входные данные могут содержать температуру масла, измеренную или выведенную некоторым образом, описанным выше.
Затем, на этапе 416 способа, двигатель подвергается проворачиванию коленчатого вала стартерным электродвигателем (например, электродвигателем 41 на фиг. 2), которое может происходить во время режима запуска двигателя.
Затем, на этапе 418 способа, текущая скорость проворачивания коленчатого вала двигателя во время проворачивания коленчатого вала двигателя определяется посредством способов, описанных выше (например, посредством измерения сигналов PIP, вырабатываемых датчиком 118 на фиг. 2). Как описано выше со ссылкой на способ 300 по фиг. 3, подходы могут быть приняты подходы для устранения переходных изменений скорости проворачивания коленчатого вала в течение периода измерения.
Затем, на этапе 420 способа, определяется разность между текущей скоростью проворачивания коленчатого вала и опорной скоростью проворачивания коленчатого вала. Как описано выше со ссылкой на способ 300 по фиг. 3, эта разность может использоваться для логического вывода вязкости масла. Например, если текущая скорость проворачивания коленчатого вала является значительно меньшим, чем опорная скорость проворачивания коленчатого вала, может делаться вывод, что вязкость масла повысилась относительно предыдущей вязкости.
Затем, на этапе 422 способа, по выбору может определяться SOC аккумуляторной батареи (например, аккумуляторной батареи 45 по фиг. 2), оперативно присоединенной к стартерному электродвигателю. Это SOC аккумуляторной батареи затем может использоваться для дополнительного логического вывода вязкости масла. Например, изменение вязкости масла может быть частично приписано относительно низкому SOC аккумуляторной батареи. Определенные SOC аккумуляторной батареи могут добавляться в структуры данных, в которых хранятся скорости проворачивания коленчатого вала. Например, опорная таблица может хранить скорости проворачивания коленчатого вала и один или более связанных параметров, в том числе, но не в качестве ограничения, вязкость масла, температуру масла и SOC аккумуляторной батареи.
Затем, на этапе 424 способа, один или более рабочих параметров подвергаются поправке на основании вязкости масла, выведенной на этапе 412. Среди других регулировок, такое внесение поправки может включать в себя корректировку, на этапе 426, положения дросселя у дроссельной заслонки, управляющей количеством воздуха, засасываемого в двигатель - например, дроссельной заслонки 22 дросселя 21 на фиг. 2. Например, положение дросселя у дроссельной заслонки может увеличиваться, чтобы дополнительно открывать дроссель, по определению, что вязкость масла повысилась.
Следует принимать во внимание, что способ 400 может быть модифицирован различными путями. В некоторых вариантах осуществления, могут учитываться зависящие от местоположения колебания температуры по всему двигателю. Несмотря на то, что температуры двигателя типично измеряются непосредственно во всасываемом воздухе, хладагента двигателя и головке блока цилиндров, трение в двигателе находится под влиянием локальных температур в подшипниках, клапанном механизме, масляном насосе и поверхностях поршня/гильзы. Эти локальные температуры могут выводиться на основании одного или более из измеренных температур (например, на основании показаний ECT с датчика 112 на фиг. 2), времени после запуска двигателя, известных тепловых свойств таких компонентов двигателя и моделей теплового распределения.
Далее, с обращением к фиг. 5, показана блок-схема последовательности операций способа, иллюстрирующая примерный способ 500 для логического вывода вязкости масла в транспортном средстве с гибридным приводом. Способ 500, например, может храниться в качестве машиночитаемых команд в ПЗУ 106 контроллера 12 на фиг. 2. Хотя способ 500 описан со ссылкой на двигатель 10 по фиг. 2, будет понятно, что способ 500 может выполняться для других двигателей внутреннего сгорания.
На этапе 502 способа 500, определяется, был ли двигатель недействующим по меньшей мере в течение пороговой продолжительности времени, например, посредством контроля вращения посредством сигналов PIP, вырабатываемых датчиком на эффекте Холла или другим типом датчика, как описано выше со ссылкой на способ 300 по фиг. 3. Если определено, что двигатель не оставался недействующим в течение по меньшей мере пороговой продолжительности времени (Нет), способ переходит на этап 504. Если определено, что двигатель оставался недействующим в течение по меньшей мере пороговой продолжительности времени (Да), способ переходит на этап 510.
На этапе 504 способа, определяется температура масла. Как описано выше со ссылкой на фиг. 4, определение температуры масла может включать в себя непосредственное измерение 506 температуры масла, если будет иметься в распоряжении выходной сигнал с датчика, выполненного с возможностью измерять температуру масла. Такой датчик, например, может быть расположен вдоль множества дренажных магистралей 164 или в поддоне 160 на фиг. 2. Наоборот, температура масла может выводиться на этапе 508 на основании множества параметров, в том числе, температуры двигателя при непосредственно предшествующем выключении, времени замачивания двигателя после остановки и текущей температуры окружающей среды, которые могут определяться, как описано выше.
На этапе 510 способа, если двигатель оставался недействующим в течение по меньшей мере пороговой продолжительности времени, температура масла выводится в качестве являющейся температурой окружающей среды.
Затем, на этапе 512 способа, выводится вязкость масла и вывод вязкости масла включает в себя извлечение опорной мощности проворачивания коленчатого вала на этапе 514. В то время как скорость проворачивания коленчатого вала типично установлено на требуемом значении для транспортных средств с гибридным приводом с большими аккумуляторными батареями высокого напряжения, вязкость масла может выводиться на основании мощности, подаваемой на стартерный электродвигатель (например, электродвигатель 41 на фиг. 2), содействующий проворачиванию коленчатого вала двигателя. Как с опорными числами оборотов проворачивания коленчатого вала, описанными выше, одна или более опорных мощностей проворачивания коленчатого вала могут храниться в пригодной структуре данных (например, справочной таблице) и подвергаться доступу для данного входного сигнала. В некоторых вариантах осуществления, опорная мощность проворачивания коленчатого вала может подвергаться доступу посредством подачи вязкости масла в качестве входных данных. В качестве альтернативы или дополнительно, входные данные могут содержать температуру масла, измеренную или выведенную некоторым образом, описанным выше.
Затем, на этапе 516 способа, двигатель подвергается проворачиванию коленчатого вала стартерным электродвигателем (например, электродвигателем 41 на фиг. 2), которое может происходить во время режима запуска двигателя.
Затем, на этапе 518 способа, определяется текущая мощность проворачивания коленчатого вала. Различные подходы могут применяться для устранения переходных изменений в измерениях мощности проворачивания коленчатого вала, такие как усреднение измеренной мощности проворачивания коленчатого вала по меньшей мере за часть периода проворачивания коленчатого вала. Мощность проворачивания коленчатого вала может быть измеренной электрической мощностью (например, электрическим током и крутящим моментом), измеренным крутящим моментом и скоростью вращения, или выводиться из других параметров.
Затем, на этапе 520 способа, определяется разность между текущей мощностью проворачивания коленчатого вала и опорной мощностью проворачивания коленчатого вала. Эта разность может использоваться для логического вывода вязкости масла. Например, если текущая мощность проворачивания коленчатого вала значительно выше, чем опорная мощность проворачивания коленчатого вала, может делаться вывод, что вязкость масла повысилась относительно предыдущей вязкости, так как более высокая мощность проворачивания коленчатого вала отбирается для достижения проворачивания коленчатого вала двигателя.
Затем, на этапе 522 способа, по выбору может определяться SOC аккумуляторной батареи (например, аккумуляторной батареи 45 по фиг. 2), оперативно присоединенной к стартерному электродвигателю. Это SOC аккумуляторной батареи затем может использоваться для дополнительного логического вывода вязкости масла. Например, изменение вязкости масла может быть частично приписано относительно низкому SOC аккумуляторной батареи. Определенные SOC аккумуляторной батареи могут добавляться в структуры данных, в которых хранятся мощности проворачивания коленчатого вала. Например, опорная таблица может хранить мощности проворачивания коленчатого вала и один или более связанных параметров, в том числе, но не в качестве ограничения, вязкость масла, температуру масла и SOC аккумуляторной батареи.
Затем, на этапе 524 способа, один или более рабочих параметров подвергаются поправке на основании вязкости масла, выведенной на этапе 512. Среди других регулировок, такое внесение поправки может включать в себя корректировку, на этапе 526, положения дросселя у дроссельной заслонки, управляющей количеством воздуха, засасываемого в двигатель - например, дроссельной заслонки 22 дросселя 21 на фиг. 2. Например, положение дросселя у дроссельной заслонки может увеличиваться, чтобы дополнительно открывать дроссель, по определению, что вязкость масла повысилась.
Фиг. 6 показывает блок-схему последовательности операций способа, иллюстрирующую примерный способ 600 для логического вывода индекса вязкости масла. Способ 600, например, может храниться в качестве машиночитаемых команд в ПЗУ 106 контроллера 12 на фиг. 2. Хотя способ 600 описан со ссылкой на двигатель 10 по фиг. 2, будет понятно, что способ 600 может выполняться для других двигателей внутреннего сгорания.
На этапе 602 способа 600, определяется, имеются ли в распоряжении вязкости масла, полученные из двух или более событий проворачивания коленчатого вала, покрывающих температурный диапазон, больший, чем пороговый диапазон температур. Другими словами, температуры, которым соответствуют полученные вязкости масла, отличны друг от друга на пороговую величину. Так как график вязкости и температуры масла может определяться впоследствии, точность и полезность графика могут повышаться посредством использования данных из по меньшей мере двух или более событий проворачивания коленчатого вала, которые покрывают относительно большой диапазон температур (например, диапазон по меньшей мере 20°C). Если определено, что вязкости масла, полученные из двух или более событий проворачивания коленчатого вала, покрывающих температурный диапазон, больший, чем пороговый температурный диапазон, имеются в распоряжении (Да), способ переходит на этап 604. Если определено, что вязкостей масла, полученные из двух или более событий проворачивания коленчатого вала, покрывающих температурный диапазон, больший, чем пороговый температурный диапазон, нет в распоряжении (Нет), способ заканчивается.
Затем, на этапе 604 способа, определяется график вязкости масла в зависимости от температуры. График может формироваться различными пригодными методами. Например, график может графически изображать вязкости масла в зависимости от температуры или, в качестве альтернативы, может графически изображать кинематические вязкости в зависимости от температуры. Масштаб, в котором показаны вязкости и температуры, также может меняться. Например, вязкости могут быть графически изображены в логарифмическом масштабе. График вязкости-температуры масла может храниться в различных пригодных структурах данных (например, опорной таблице) на запоминающем носителе, таком как ПЗУ 106 контроллера 12 на фиг. 2.
Фиг. 7 показывает пример графика 700 вязкости-температуры масла, сформированный в соответствии с вариантом осуществления настоящего изобретения. Здесь, множество вязкостей масла были выведены на основании способов, раскрытых в материалах настоящего описания для диапазона температур (например, температур масла), по существу покрывающего диапазон, простирающийся между -20°C и 100°C. В частности, множество кинематических вязкостей (в единицах мм2/с) графически изображены в логарифмическом масштабе. Следует принимать во внимание, что график 700 вязкости-температуры масла предоставлен только в качестве иллюстративного примера, и не подразумевается ограничивающим никоим образом. Дискретные выведенные вязкости масла показаны в качестве формирующих непрерывный график только ради иллюстрации.
Возвращаясь на фиг. 6, на этапе 606 способа 600, аппроксимация применяется к графику вязкости-температуры масла. Эта аппроксимация может моделировать экстраполированные данные, чтобы вязкости масла могли выводиться для температур, на которых вязкости масла не определялись. Аппроксимация может определяться посредством различных известных способов, а в некоторых примерах, может быть криволинейной аппроксимацией (например, нелинейной). Например, аппроксимация может определяться на основании метода наименьших квадратов.
Затем, на этапе 608 способа, определяется, отклоняется ли последняя по времени определения вязкость масла от аппроксимации, определенной на этапе 606, на величину, большую, чем пороговое отклонение (например, пороговая вязкость). Пороговое отклонение может быть установлено, чтобы переходные отклонения измерений вязкости масла не уменьшали предсказательной силы аппроксимации. Если определено, что последняя по времени определения вязкость масла не отклоняется от аппроксимации на величину, большую, чем пороговое отклонение (Нет), способ переходит на этап 610. Если определено, что последняя по времени определения вязкость масла отклоняется от аппроксимации на величину, большую, чем пороговое отклонение (Да), способ переходит на этап 612.
На этапе 610 способа, последняя по времени определения вязкость масла добавляется в график вязкости-температуры масла (например, график 700 по фиг. 7).
Затем, на этапе 612 способа, индекс вязкости масла выводится на основании аппроксимации, определенной на этапе 606, и применяться к графику вязкости-температуры масла. Индекс вязкости, например может выводиться посредством следующей зависимости: V=100((A-B)/(A-C)), где V - индекс вязкости, B - кинематическая вязкость на 40°C, а A и C - значения, основанные на кинематической вязкости на 100°C. выведенный индекс вязкости, например, может сохраняться на запоминающем носителе, таком как ПЗУ 106 контроллера 12 на фиг. 2.
Затем, на этапе 614 способа, один или более рабочих параметров по выбору могут подвергаться поправке на основании индекса вязкости масла, выведенного на этапе 612. Среди других регулировок, такое внесение поправки может включать в себя корректировку, на этапе 616, положения дросселя у дроссельной заслонки, управляющей количеством воздуха, засасываемого в двигатель - например, дроссельной заслонки 22 дросселя 21 на фиг. 2. Например, положение дросселя у дроссельной заслонки может увеличиваться, чтобы дополнительно открывать дроссель, по определению, что вязкость масла повысилась.
Способ 600 содействует логическому выводу индекса вязкости масла и, посредством определения аппроксимации для графика вязкости-температуры масла, определения вязкости масла для температур, на которых вязкость масла не выводилась, во время работы двигателя, а не только проворачивания коленчатого вала двигателя.
Следует принимать во внимание, что способ 600 может быть модифицирован различными путями. Например, расположение блока 608 принятия решения может быть изменено. В некоторых вариантах осуществления, действия, выполняемые посредством блока 608 и 610 принятия решения, могут выполняться в отдельном способе, реализуемом для добавления надлежащих измерительных точек в график вязкости-температуры масла.
Далее, с обращением к фиг. 8, показана блок-схема последовательности операций способа, иллюстрирующая способ 800 для логического вывода вязкости масла в двигателе внутреннего сгорания на основании времени пополнения поддона. Способ 800, например, может храниться в качестве машиночитаемых команд в ПЗУ 106 контроллера 12 на фиг. 2. Хотя способ 800 описан со ссылкой на двигатель 10 по фиг. 2, будет понятно, что способ 800 может выполняться для других двигателей внутреннего сгорания.
На этапе 802 способа 800, определяется, произошла ли остановка (например, вывод из работы) двигателя. Если определено, что остановка двигателя не произошла (Нет), способ заканчивается, так как выведения вязкости масла в этом варианте осуществления основаны на периодах, в течение которых масло оттекает из двигателя. Если двигатель остановился (Да), способ переходит на этап 804.
На этапе 804 способа 800, определяется температура масла в двигателе. Как описано выше, температура масла может непосредственно измеряться на этапе 806, если имеется в распоряжении выходной сигнал с датчика, выполненного с возможностью измерять температуру масла. В качестве альтернативы, температура масла выводится на этапе 808 на основании множества параметров, которые могут включать в себя температуру окружающей среды двигателя при непосредственно предыдущем запуске, время, которое был работающим двигатель и текущую температуру хладагента. Температура масла дополнительно может выводиться на основании других показаний температуры, таких как измерения температуры металлических компонентов в двигателе. Таким образом, температура масла может выводиться из одной или более температур в различных местоположениях в пределах двигателя и из одного или более условий работы двигателя.
Затем, на этапе 810 способа, определяется, была ли информация о новой вязкости масла подана в систему управления двигателя, например, водителем транспортного средства или техническим специалистом сервисной службы. Новая вязкость масла может подаваться в контроллер двигателя, выполняющий способ 800, такой как контроллер 12 по фиг. 2, и сохраняться на запоминающем носителе контроллера двигателя (например, в ПЗУ 106). В некоторых сценариях, новая вязкость масла может подаваться в условиях производства перед или одновременно с начальным вводом в действие (например, зажиганием) двигателя. Двигатель может заправляться маслом. В других сценариях, новая вязкость масла может подаваться по замене масла. Масла для замены (или новые) могут иметь рекомендованную производителем вязкость, пригодную для двигателя, или могут иметь другие известные вязкости. Как описано выше, новые вязкости масла могут подаваться в блок управления двигателем различными пригодными способами - например, через инструмент для технического обслуживания и ремонта, присоединенный к порту бортовой диагностики (OBD), посредством находящегося в транспортном средстве сенсорного экрана или другого информационного экрана для водителя, или посредством заданной последовательности или комбинации событий включения/выключения зажигания и/или переключений. Если новая вязкость масла была подана (Да), способ переходит на этап 812. Если новая вязкость масла не была подана (Нет), способ переходит на этап 814.
На этапе 812 способа, определяется продолжительность времени, за которую масляный поддон пополняется маслом, оттекающим из двигателя вслед за остановкой. Время пополнения поддона может определяться для сценариев, в которых, среди прочего, двигатель является новым и/или использует масло, имеющее рекомендованную производителем или другую известную вязкость. В этих случаях, определенные времена пополнения поддона могут считаться нормальными. Датчик 166 уровня масла на фиг. 2, например, может использоваться для указания количества масла в масляном поддоне 160. Измерения с этого датчика, в таком случае, могут отслеживаться по времени для оценки изменений уровней масла в поддоне (например, подача масла в двигатель, отток масла из двигателя) и определять время пополнения поддона для данной вязкости масла, которая, в этом примере, является вязкостью, подаваемой в систему управления двигателем. Одно или более времен пополнения поддона могут определяться таким образом для связанных вязкостей масла и сохраняться на пригодном запоминающем носителе. Например, множество времен пополнения поддона и связанных вязкостей масла, например, могут сохраняться в ПЗУ 106 контроллера 12 на фиг. 2 и извлекаться посредством справочной таблицы. Вслед за 812, способ переходит на этап 822.
Если было определено, что новая вязкость масла не была подана на этапе 810 (Нет), способ переходит на этап 814, где выводится вязкость масла в двигателе и вывод вязкости масла включает в себя, на этапе 816, определение текущего времени пополнения поддона. Текущее время пополнения поддона может определяться посредством отслеживания выходного сигнала с датчика уровня масла, как описано выше. Начало и окончание времени пополнения поддона могут определяться различными способами. Например, время пополнения поддона может продолжаться от момента времени остановки двигателя до момента времени, в который скорость изменения уровня масла в поддоне уменьшается ниже порогового уровня. Дополнительно или в качестве альтернативы, время пополнения поддона частично может быть основано на датчике уровня масла, указывающем, когда оттекшее масло из двигателя достигает заданного уровня в поддоне.
И вывод вязкости масла дополнительно включает в себя, на этапе 818, извлечение сохраненного времени пополнения поддона и его связанной вязкости масла. Как описано выше, множество времен пополнения поддона, определяемых для соответствующих вязкостей масла, могут сохраняться на машиночитаемом запоминающем носителе и быть доступными посредством блока управления двигателем (например, сохраняться в ПЗУ 106 контроллера 12 на фиг. 2).
И вывод вязкости масла дополнительно включает в себя, на этапе 820, определение разности между текущим временем пополнения поддона, определяемым на этапе 816, и хранимым временем пополнения поддона, извлеченным на этапе 818. Эта разность может использоваться для логического вывода вязкости масла. Например, если текущее время пополнения поддона больше, чем хранимое время пополнения, может делаться вывод, что вязкость масла, циркулирующего на данный момент через двигатель и масляный поддон, больше, чем вязкость масла, для которого узнавалось хранимое время пополнения поддона. В некоторых подходах, разность между текущим временем пополнения поддона и хранимым временем пополнения поддона может умножаться на вязкость, связанную с хранимым временем пополнения поддона, чтобы выводить текущую вязкость масла.
В заключение, на этапе 822 способа, один или более рабочих параметров по выбору могут подвергаться поправке на основании поданной или выведенной вязкости масла. Среди других регулировок, такое внесение поправки может включать в себя корректировку, на этапе 824, положения дросселя у дроссельной заслонки, управляющей количеством воздуха, засасываемого в двигатель - например, дроссельной заслонки 22 дросселя 21 на фиг. 2. Например, положение дросселя у дроссельной заслонки может увеличиваться, чтобы дополнительно открывать дроссель, по определению, что вязкость масла повысилась. В некоторых вариантах осуществления, поправка одного или более рабочих параметров может выполняться на основании других величин, таких как определенная температура масла.
Следует принимать во внимание, что способ 800 может модифицироваться различными подходящими способами. Например, времена пополнения поддона могут определяться для сценариев, в которых новая вязкость масла не подается. В некоторых подходах, определение может планироваться периодически, так чтобы времена пополнения поддона определялись по мере того, как двигатель и другие компоненты постепенно стареют.
Далее, с обращением к фиг. 9, показана блок-схема последовательности операций способа, иллюстрирующая способ 900 для логического вывода индекса вязкости масла. Способ 900, например, может храниться в качестве машиночитаемых команд в ПЗУ 106 контроллера 12 на фиг. 2. Хотя способ 900 описан со ссылкой на двигатель 10 по фиг. 2, будет понятно, что способ 900 может выполняться для других двигателей внутреннего сгорания.
На этапе 902 способа 900, определяется, имеются ли в распоряжении вязкости масла, выведенные два или более раз после последней замены масла и покрывающие температурный диапазон, больший, чем пороговый диапазон температур. Так как график вязкости и температуры масла может определяться впоследствии, точность и полезность графика могут повышаться посредством использования данных из по меньшей мере двух х выводов вязкости, которые покрывают относительно большой диапазон температур (например, диапазон по меньшей мере 20°C). Если определено, что вязкости масла, выведенные два или более раз после последней замены масла, покрывающие температурный диапазон, больший, чем пороговый температурный диапазон, имеются в распоряжении (Да), способ переходит на этап 904. Если определено, что вязкостей масла, выведенных два или более раз после последней замены масла, покрывающих температурный диапазон, больший, чем пороговый температурный диапазон, нет в распоряжении (Да), способ заканчивается.
Затем, на этапе 904 способа, определяется график вязкости масла в зависимости от температуры. График может формироваться различными пригодными методами. Например, график может графически изображать вязкости масла в зависимости от температуры или, в качестве альтернативы, может графически изображать кинематические вязкости в зависимости от температуры. Масштаб, в котором показаны вязкости и температуры, также может меняться. Например, вязкости могут быть графически изображены в логарифмическом масштабе. График вязкости-температуры масла может храниться в различных пригодных структурах данных (например, справочной таблице) на запоминающем носителе, таком как ПЗУ 106 контроллера 12 на фиг. 2.
Затем, на этапе 906 способа, аппроксимация применяется к графику вязкости-температуры. Эта аппроксимация может моделировать экстраполированные данные, чтобы вязкости масла могли выводиться для температур, на которых вязкости масла не выводились. Аппроксимация может определяться посредством различных известных способов, а в некоторых примерах, может быть криволинейной аппроксимацией (например, нелинейной). Например, аппроксимация может определяться на основании метода наименьших квадратов.
Затем, на этапе 908 способа, определяется, отклоняется ли последняя по времени определения вязкость масла от аппроксимации, определенной на этапе 906, на величину, большую, чем пороговое отклонение (например, пороговая вязкость). Пороговое отклонение может быть установлено, чтобы переходные отклонения измерений вязкости масла не уменьшали предсказательной силы аппроксимации. В некоторых вариантах осуществления, две или более вязкостей, покрывающих минимальную продолжительность времени, могут оцениваться по отношению к пороговому отклонению. Если определено, что последняя по времени определения вязкость масла не отклоняется от аппроксимации на величину, большую, чем пороговое отклонение (Нет), способ переходит на этап 912. Если определено, что последняя по времени определения вязкость масла отклоняется от аппроксимации на величину, большую, чем пороговое отклонение (Да), способ переходит на этап 910.
На этапе 910 способа, делается вывод, что произошла замена масла. По осуществлению этого вывода, может выполняться множество не показанных действий. Например, событие определения вязкости масла может предпочтительно планироваться. В качестве альтернативы или дополнительно, водитель транспортного средства может информироваться о замене масла посредством индикаторов приборной панели, панели отображения, и т.д.
На этапе 912 способа, индекс вязкости масла выводится на основании аппроксимации, определенной на этапе 906, и применяться к графику вязкости-температуры масла. Индекс вязкости, например может выводиться посредством следующей зависимости: V=100((A-B)/(A-C)), где V - индекс вязкости, B - кинематическая вязкость на 40°C, а A и C - значения, основанные на кинематической вязкости на 100°C. выведенный индекс вязкости, например, может сохраняться на запоминающем носителе, таком как ПЗУ 106 контроллера 12 на фиг. 2.
Затем, на этапе 914 способа, один или более рабочих параметров по выбору могут подвергаться поправке на основании индекса вязкости масла, выведенного на этапе 912. Среди других регулировок, такое внесение поправки может включать в себя корректировку, на этапе 916, положения дросселя у дроссельной заслонки, управляющей количеством воздуха, засасываемого в двигатель, как описано выше. В некоторых вариантах осуществления, поправка одного или более рабочих параметров может выполняться на основании других величин, таких как определенная температура масла.
В некоторых сценариях, текущие вязкость и индекс вязкости масла могут быть не известны. Поэтому, предполагаемые вязкость и/или индекс вязкости масла могут использоваться во время работы двигателя. В качестве одного из неограничивающих примеров, скорость холостого хода двигателя (например, двигателя 10) может регулироваться посредством определения исходного положения дросселя для дросселя, управляющего количеством воздуха, засасываемого в двигатель, на основании требуемой скорости холостого хода и предполагаемой вязкости масла. Предполагаемая вязкость масла может быть основана на определенной или поданной ранее вязкости масла. Впоследствии, по определению текущего индекса вязкости посредством способов, описанных выше, исходное положение дросселя может подвергаться поправке на основании определяемого индекса вязкости в дополнение к другим параметрам, таким как данная температура масла. Процедуры, применяемые при управлении положением дросселя, кроме того, могут увеличивать положение дросселя, когда действующая скорость холостого хода меньше, чем требуемая скорость холостого хода, и уменьшать положение дросселя, когда действующая скорость холостого хода больше, чем требуемая скорость холостого хода.
Далее, с обращением к фиг. 10, показана блок-схема последовательности операций способа, иллюстрирующая способ 1000 для регулирования скорости холостого хода двигателя внутреннего сгорания. Способ 1000, например, может применяться для регулирования скорости холостого хода двигателя 10 на фиг. 2, хотя будет понятно, что способ 1000 может использоваться для регулирования скорости холостого хода других двигателей. Способ 1000, например, может храниться в качестве машиночитаемых команд в ПЗУ 106 контроллера 12 на фиг. 2.
На этапе 1002 способа 1000, угол дросселя определяется для требуемой скорости холостого хода двигателя при условии стандартной вязкости масла двигателя. Угол дросселя может определяться для впускного дросселя, выполненного с возможностью регулировать количество воздуха, засасываемого в двигатель - например, дросселя 21 на фиг. 2. Определение угла дросселя может включать в себя осуществление доступа к базе данных, в которой множество углов дросселя хранятся и связаны с требуемыми числами оборотов холостого хода двигателя. Например, угол дросселя может извлекаться посредством подачи требуемой скорости холостого хода двигателя в справочную таблицу. Стандартная вязкость моторного масла, которая предполагается, может соответствовать рекомендованной производителем вязкости масла для двигателя или может быть основана на одной или более определяемых ранее вязкостей масла и других факторах, таких как промежуток времени после самого последнего определения вязкости масла.
Затем, на этапе 1004 способа, действующая вязкость моторного масла рассчитывается на основании текущих температуры и индекса вязкости масла. Как описано выше, измерение температуры масла может выполняться непосредственно или выводиться на основании других показаний, например, таких как показания ECT с датчика 112 на фиг. 2. Индекс вязкости может выводиться посредством способа 900, показанного на фиг. 9.
Затем, на этапе 1006 способа, угол дросселя, определяемый на этапе 1002, увеличивается, если действующая вязкость, рассчитанная на этапе 1004, больше, чем предполагаемая стандартная вязкость. В качестве альтернативы, если действующая вязкость меньше, чем предполагаемая стандартная вязкость, угол дросселя уменьшается. В некоторых вариантах осуществления, угол дросселя может увеличиваться или уменьшаться пропорционально разности между рассчитанной и предполагаемой стандартной вязкостью.
Затем, на этапе 1008 способа, определяется, является ли действующая скорость холостого хода большим, чем требуемая скорость холостого хода. Действующая скорость холостого хода, например, может определяться посредством контроля сигналов PIP, вырабатываемых датчиком 118 на фиг. 2. Если определено, что действующая скорость холостого хода больше, чем требуемая скорость холостого хода (Да), способ переходит на этап 1010. Если определено, что действующая скорость холостого хода не больше, чем требуемая скорость холостого хода (Нет), способ переходит на этап 1012.
На этапе 1010 способа, угол дросселя уменьшается, чтобы уменьшать разность между действующей скоростью холостого хода и требуемой скоростью холостого хода. В некоторых вариантах осуществления, угол дросселя может уменьшаться пропорционально разности между действующей скоростью холостого хода и требуемой скоростью холостого хода. Вслед за 1010, способ заканчивается.
На этапе 1012 способа, определяется, является ли действующая скорость холостого хода меньшим, чем требуемая скорость холостого хода. Если определено, что действующая скорость холостого хода меньше, чем требуемая скорость холостого хода (Да), способ переходит на этап 1014. Если определено, что действующая скорость холостого хода не меньше, чем требуемая скорость холостого хода (Нет), способ заканчивается.
В заключение, на этапе 1014 способа, угол дросселя увеличивается, чтобы уменьшать разность между действующей скоростью холостого хода и требуемой скоростью холостого хода. В некоторых вариантах осуществления, угол дросселя может увеличиваться пропорционально разности между действующей скоростью холостого хода и требуемой скоростью холостого хода. Вслед за 1014, способ заканчивается.
Фиг. 11 показывает блок-схему последовательности операций способа, иллюстрирующую способ 1100 для логического вывода вязкости масла в гибридном приводе с модульной гибридной трансмиссией (MHT). Способ 1100, например, может быть реализован в транспортном средстве с гибридным приводом, схематично показанном на фиг. 1, которое включает в себя муфту 7 расцепления и встроенный в привод на ведущие колеса стартер/генератор 3 (DISG).
На этапе 1102 способа, определяется, произошел ли перезапуск двигателя при температуре выше пороговой температуры. Температура двигателя 10 на фиг. 1 может определяться многообразием пригодных способов - например, посредством показаний ECT с датчика 112 на фиг. 2. В некоторых вариантах осуществления, пороговая температура может выбираться, чтобы способ продолжал движение для горячих перезапусков, но не для перезапусков при более холодных температур. В других вариантах осуществления, пороговая температура может быть относительно более низкой, чтобы способ также продолжал движение для теплых перезапусков. Как правило, пороговая температура может выбираться, чтобы выполнялись е выводы вязкости масла, например, при которых двигатель подвергается проворачиванию коленчатого вала посредством DISG, а не типичного стартерного электродвигателя. Если перезапуск двигателя произошел при температуре выше пороговой температуры (Да), способ переходит на этап 1104. Если перезапуск двигателя не произошел при температуре выше пороговой температуры (Нет), способ заканчивается.
Затем, на этапе 1104 способа, определяется, подается ли крутящий момент муфтой расцепления, приводимой в движение посредством DISG, на одно или более колес транспортного средства. Это определение может выполняться посредством контроля крутящего момента, выдаваемого с муфты расцепления и/или DISG, и, в качестве альтернативы или дополнительно, контроля или логического вывода вращения колес. В одном из примеров, крутящий момент, выдаваемый с муфты расцепления, может определяться на основании выходного сигнала с датчика 8 на фиг. 1 и выходного сигнала с датчика 118 на фиг. 2. Разностные положения на датчике 8, выдаваемые посредством его выходного сигнала, и положения коленчатого вала двигателя, указываемые датчиком 118, могут использоваться для расчета крутящего момента на поворотной пружине маховика 5 двойной массы на фиг. 1, который, в таком случае, может приравниваться к крутящему моменту муфты расцепления во время перезапуска двигателя. Если определено, что крутящий момент не подается ни на какие колеса в транспортном средстве (Нет), и что DISG выдает крутящий момент исключительно на коленчатый вал двигателя, способ переходит на этап 1106. Если определено, что крутящий момент подается на одно или более колес в транспортном средстве (Да), способ переходит на этап 1108.
На этапе 1106 способа, крутящий момент муфты расцепления определяется на основании крутящего момента DISG. В то время как DISG выдает крутящий момент исключительно на коленчатый вал двигателя, крутящий момент муфты расцепления приравнивается крутящему моменту DISG.
На этапе 1108 способа, определив, что крутящий момент подается на одно или более колес транспортного средства, определяется, является ли муфта расцепления проскальзывающей. Если определено, что муфта расцепления не проскальзывает (Нет), способ заканчивается. Если определено, что муфта расцепления является проскальзывающей (Да), способ переходит на этап 1109, где определяется, постоянен ли градиент скорости вращения двигателя (например, является ли ускорение транспортного средства нулевым или постоянным значением). Если градиент скорости вращения двигателя не постоянен (Нет), способ переходит на этап 1110, где оценивается крутящий момент муфты расцепления. Оценка муфты расцепления на этапе 1110 включает в себя, на этапе 1112, определение давления муфты, а на этапе 1114, определение скорости проскальзывания муфты расцепления, так как величина крутящего момента, передаваемого проскальзывающей муфтой может рассчитываться как давление муфты, умноженное на эффективную площадь муфты, а знак крутящего момента муфты может определяться на основании знака скорости проскальзывания муфты. В некоторых примерах, давление муфты может быть известной величиной и, таким образом, может определяться непосредственно. В других примерах, давление муфты выводится из командного давления муфты. Скорость и знак проскальзывания муфты могут определяться на основании выходного сигнала с датчика 8 на фиг. 1, описанного выше.
Если, на этапе 1109, определено, что градиент скорости вращения двигателя постоянен (Да), способ переходит на этап 11116, где муфта расцепления оценивается на основании изменения крутящего момента DISG.
После этапов 1106, 1110 и 1116, определяется вязкость масла, текущего внутри транспортного средства и двигателя. На этапе 1118 способа, вязкость масла может определяться некоторым образом, подобным описанным выше. Более точно, опорный крутящий момент муфты расцепления извлекается на этапе 1120. Один или более опорных крутящих моментов муфты расцепления могут храниться в пригодной структуре данных (например, справочной таблице) и подвергаться доступу для данного входного сигнала. В некоторых вариантах осуществления, опорный крутящий момент муфты расцепления может подвергаться доступу посредством подачи температуры масла в качестве входных данных, измеренной или выведенной описанным выше образом. На этапе 1122, определяется разность между этим опорным крутящим моментом муфты расцепления и текущим крутящим моментом муфты расцепления. Эта разность может использоваться для логического вывода вязкости масла. Например, если текущий крутящий момент муфты расцепления является значительно более высоким, чем опорный крутящий момент муфты расцепления, может делаться вывод, что вязкость масла повысилась относительно предыдущей вязкости, так как более высокий крутящий момент подается для достижения проворачивания коленчатого вала двигателя и/или вращения колес.
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящего описания, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Способы и процедуры управления, раскрытые в материалах настоящего описания, могут храниться в качестве исполняемых команд в постоянной памяти. Специфичные процедуры, описанные в материалах настоящего описания, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящего описания, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машиночитаемого запоминающего носителя в системе управления двигателем.
Следует принимать во внимание, что конфигурации и процедуры, раскрытые в материалах настоящего описания, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего изобретения включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящего описания.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Следует понимать, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЯВЛЕНИЕ ВЯЗКОСТИ С ИСПОЛЬЗОВАНИЕМ СТАРТЕРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2653713C2 |
| СПОСОБ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) | 2014 |
|
RU2581993C2 |
| СПОСОБ ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СИСТЕМА ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2588390C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЮФТОМ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ЛЮФТОМ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2640085C2 |
| СПОСОБ ОСТАНОВА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2642012C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) И СИСТЕМА ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА | 2013 |
|
RU2640676C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) И СИСТЕМА ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА | 2013 |
|
RU2629820C2 |
| СПОСОБ РАБОТЫ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2640433C2 |
| СПОСОБ ОСТАНОВА ВРАЩЕНИЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ОСТАНОВА ВРАЩЕНИЯ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643016C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2640162C2 |

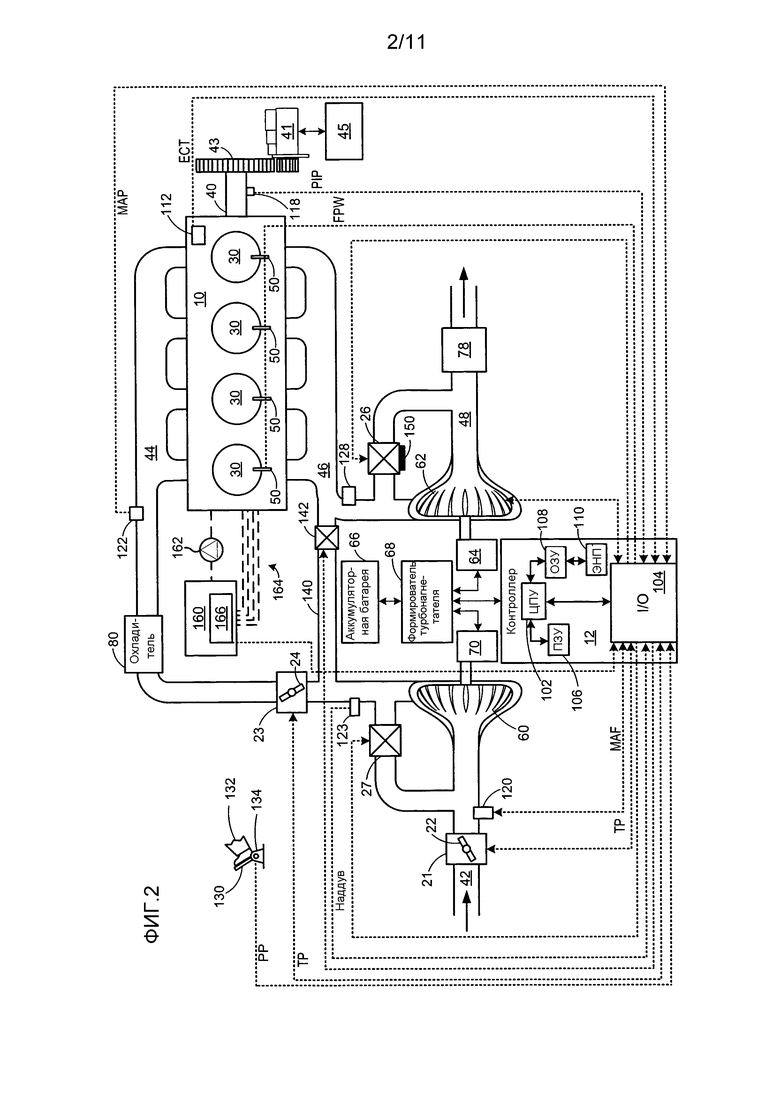









Изобретение может быть использовано в двигателях внутреннего сгорания. Способ управления двигателем (10) заключается в том, что определяют после остановки двигателя (10) вязкость моторного масла на основании времени слива масла обратно в поддон картера двигателя и температуры масла при сливе. Корректируют рабочий параметр двигателя (10) на основании определенной вязкости масла. Рабочий параметр двигателя (10) определяется по положению или углу дросселя в дроссельной заслонке (4). Дроссельная заслонка (4) управляется контроллером (12) двигателя для регулирования воздуха, засасываемого в двигатель (10). Раскрыты варианты способа управления двигателем. Технический результат заключается в выявлении реальной вязкости масла и возможности изменения работы двигателя на основании полученной реальной вязкости масла. 3 н. и 16 з.п. ф-лы, 11 ил. 
1. Способ управления двигателем, включающий в себя этапы, на которых:
определяют после остановки двигателя вязкость моторного масла на основании времени слива масла обратно в поддон картера двигателя и температуры масла при указанном сливе; и
корректируют рабочий параметр двигателя на основании указанной определенной вязкости масла, причем указанный рабочий параметр двигателя содержит положение или угол дросселя по дроссельной заслонке, управляемой контроллером двигателя для регулирования воздуха, засасываемого в двигатель.
2. Способ по п. 1, дополнительно включающий в себя этапы, на которых определяют нормальное время пополнения поддона, когда двигатель является новым, с использованием известной вязкости масла, при этом указанное определение вязкости масла дополнительно включает в себя этап, на котором сравнивают указанное время пополнения поддона после остановки двигателя с указанным временем пополнения поддона для указанного нового двигателя.
3. Способ по п. 2, в котором указанное определение нормального времени пополнения поддона и указанное определение вязкости масла осуществляют в ответ на указанную температуру масла.
4. Способ по п. 1, в котором указанную температуру масла обеспечивают датчиком температуры.
5. Способ по п. 1, в котором указанную температуру масла выводят из одной или более температур двигателя и одного или более условий работы двигателя.
6. Способ по п. 1, в котором указанной дроссельной заслонке дают команду требуемого положения дросселя для обеспечения засасывания требуемого количества воздуха в двигатель, причем указанное требуемое положение дросселя корректируют на основании указанной определенной вязкости масла.
7. Способ управления двигателем, включающий в себя этапы, на которых:
определяют после остановки двигателя вязкость масла у моторного масла на основании температуры указанного масла и времени слива указанного масла обратно в поддон картера двигателя;
определяют индекс вязкости указанного масла по меньшей мере по двум указанным определяемым вязкостям и температурам масла после по меньшей мере двух указанных остановок двигателя при разных температурах; и
корректируют рабочий параметр двигателя на основании текущей температуры указанного масла и индекса вязкости указанного масла.
8. Способ по п. 7, в котором указанный рабочий параметр двигателя содержит положение или угол дросселя по дроссельной заслонке, управляемой контроллером двигателя для регулирования воздуха, засасываемого в двигатель.
9. Способ по п. 8, в котором указанной дроссельной заслонке дают команду требуемого положения дросселя для обеспечения засасывания требуемого количества воздуха в двигатель, причем указанное требуемое положение дросселя корректируют на основании указанного индекса вязкости и указанной текущей температуры.
10. Способ по п. 7, в котором указанные температуры моторного масла после по меньшей мере двух указанных остановок двигателя отличны друг от друга на пороговую величину.
11. Способ по п. 7, дополнительно включающий в себя этапы, на которых осуществляют криволинейную аппроксимацию указанных определяемых вязкостей моторного масла в зависимости от указанных температур моторного масла.
12. Способ по п. 11, в котором указанный определяемый индекс вязкости выводят из указанной криволинейной аппроксимации.
13. Способ по п. 11, дополнительно включающий в себя этап, на котором определяют, что произошла замена моторного масла, когда одна из указанных определяемых вязкостей моторного масла не соответствует указанной кривой.
14. Способ управления двигателем, включающий в себя этапы, на которых:
определяют после остановки двигателя вязкость масла у моторного масла на основании температуры указанного масла и времени слива указанного масла обратно в поддон картера двигателя;
определяют индекс вязкости указанного масла по меньшей мере по двум указанным определяемым вязкостям масла после по меньшей мере двух указанных остановок двигателя при разных температурах;
регулируют скорость холостого хода двигателя посредством первого определения исходного положения дросселя на основании требуемой скорости холостого хода и предполагаемой вязкости масла; и
корректируют указанное исходное положение дросселя на основании указанного определяемого индекса вязкости и данной температуры масла.
15. Способ по п. 14, дополнительно включающий в себя этапы, на которых увеличивают указанное положение дросселя, когда указанная определенная вязкость указанного масла больше, чем указанная предполагаемая вязкость масла, и уменьшают указанное положение дросселя, когда указанная определенная вязкость указанного масла меньше, чем указанная предполагаемая вязкость масла.
16. Способ по п. 14, в котором указанное время слива указанного масла обратно в указанный поддон основано по меньшей мере частично на датчике уровня масла, указывающем, когда указанное сливаемое масло достигает заданного уровня масла в указанном поддоне.
17. Способ по п. 14, в котором указанные температуры моторного масла после по меньшей мере двух указанных остановок двигателя отличны друг от друга на пороговую величину.
18. Способ по п. 14, дополнительно включающий в себя этап, на котором выполняют криволинейную аппроксимацию указанных определяемых вязкостей моторного масла в зависимости от указанных температур моторного масла.
19. Способ по п. 18, в котором указанный определяемый индекс вязкости выводят из указанной криволинейной аппроксимации.
| DE 19518776 A1, 28.11.1996 | |||
| US 6732572 B1, 11.05.2004 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 2002174712 A1, 28.11.2002 | |||
| СПОСОБ И СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ МАСЛА В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2232904C1 |

