ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Разнообразные хирургические инструменты включают концевой эффектор, имеющий режущий элемент, который вибрирует на ультразвуковых частотах для рассечения и/или запечатывания ткани (например, путем денатурации белков в клетках тканей). Эти инструменты включают пьезоэлектрические элементы, преобразующие электрическую энергию в ультразвуковые вибрации, которые передаются по акустическому волноводу на режущий элемент. Примеры таких ультразвуковых хирургических инструментов включают ультразвуковые ножницы HARMONIC ACE®, ультразвуковые ножницы HARMONIC WAVE®, ультразвуковые ножницы HARMONIC FOCUS® и ультразвуковые лезвия HARMONIC SYNERGY®, все производства компании Ethicon Endo-Surgery, Inc., г. Цинциннати, штат Огайо, США. Другие примеры таких устройств и связанные с ними понятия описаны в патенте США № 5,322,055, озаглавленном «Зажимная коагулирующая/разрезающая система для ультразвуковых хирургических инструментов», выпущенном 21 июня 1994 года, описание которого включено в настоящий документ путем ссылки; патент США № 5,873,873, озаглавленный «Ультразвуковое зажимное коагулирующее устройство, имеющее улучшенный зажимной механизм», выпущенный 23 февраля 1999 года, описание которого включено в настоящий документ путем ссылки; патент США № 5,980,510, озаглавленный «Ультразвуковой зажимной коагулирующий аппарат с улучшенным креплением зажимного рычага», поданный 10 октября 1997 года, описание которого включено в настоящий документ путем ссылки; патент США № 6,325,811, озаглавленный «Лезвия с функциональными асимметриями баланса для применения с ультразвуковыми хирургическими инструментами», выпущенный 4 декабря 2001 года, описание которого включено в настоящий документ путем ссылки; патент США № 6,783,524, озаглавленный «Роботизированный хирургический инструмент с ультразвуковым инструментом для каутеризации и рассечения», выпущенный 31 августа 2004 года, описание которого включено в настоящий документ путем ссылки; публикацию США № 2006/0079874, озаглавленную «Тканевая пластина для применения с ультразвуковым хирургическим инструментом», опубликованную 13 апреля 2006 года, описание которой включено в настоящий документ путем ссылки; публикацию США № 2007/0191713, озаглавленную «Ультразвуковое устройство для рассечения и коагуляции», опубликованную 16 августа 2007 года, описание которой включено в настоящий документ путем ссылки; публикацию США № 2007/0282333, озаглавленную «Ультразвуковой волновод и лезвие», опубликованную 6 декабря 2007 года, описание которой включено в настоящий документ путем ссылки; публикацию США № 2008/0200940, озаглавленную «Ультразвуковое устройство для рассечения и коагуляции», опубликованную 21 августа 2008 года, описание которой включено в настоящий документ путем ссылки; публикацию США № 2010/0069940, озаглавленную «Ультразвуковое устройство с управлением за счет прикосновения», опубликованную 18 марта 2010 года, описание которой включено в настоящий документ путем ссылки; и публикацию США № 2011/0015660, озаглавленную «Вращающееся крепление преобразователя для ультразвуковых хирургических инструментов», опубликованную 20 января 2011 года, описание которой включено в настоящий документ путем ссылки; заявку на патент США № 13/538,588, поданную 29 июня 2012 года, озаглавленную «Хирургические инструменты с шарнирными ручками», описание которой включено в настоящий документ путем ссылки; и заявку на патент США № 13/657,553, поданную 22 октября 2012 года, озаглавленную «Гибкие гармонические волноводы/лезвия для хирургических инструментов», описание которой включено в настоящий документ путем ссылки. Кроме того, некоторые из вышеуказанных хирургических инструментов могут оснащаться беспроводным преобразователем, описание которого приведено в заявке на патент США № 61/410,603, поданной 5 ноября 2010 года, озаглавленной «Хирургические инструменты на основе использования энергии», описание которой включено в настоящий документ путем ссылки.
Кроме того, различные хирургические инструменты включают в себя стволы с шарнирной секцией и обладают расширенными возможностями для позиционирования рабочего концевого эффектора, расположенного на противоположном конце от шарнирной части. Примеры таких устройств включают в себя различные модели эндоскопических режущих инструментов ENDOPATH® от производителя Ethicon Endo-Surgery, Inc, Цинциннати, штат Огайо. Другие примеры таких устройств и связанные с ними понятия описаны в патенте США № 7,380,696, озаглавленном «Шарнирный хирургический сшивающий инструмент со встроенным двухкомпонентным спусковым механизмом с трехрогим элементом», выпущенном 3 июня 2008 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,404,508, озаглавленном «Хирургическое режуще-сшивающее устройство», выпущенном 29 июля 2008 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,455,208, озаглавленном «Хирургический инструмент с шарнирным стволом с жесткими опорами стержня спускового механизма», выпущенном 25 ноября 2008 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,506,790, озаглавленном «Хирургический инструмент с шарнирным механизмом на электрическом приводе», выпущенном 24 марта 2009 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,549,564, озаглавленном «Хирургический сшивающий аппарат с шарнирным концевым эффектором», выпущенном 23 июня 2009 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,559,450, озаглавленном «Хирургический инструмент с гидравлически управляемым шарнирным механизмом», выпущенном 14 июля 2009 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,654,431, озаглавленном «Хирургический инструмент продольно контролируемым подвижным шарнирным элементом», выпущенном 2 февраля 2010 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,780,054, озаглавленном «Хирургический инструмент с продольно перемещаемым приводом ствола, связанным с шарнирным сочленением», выпущенном 24 августа 2010 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,784,662, озаглавленном «Хирургический инструмент с шарнирным стволом с затвором с одним стержнем и заземлением корпуса с двумя стержнями», выпущенном 31 августа 2010 года, описание которого включено в настоящий документ путем ссылки; и патенте США № 7,798,386, озаглавленном «Крышка шарнирного сочленения хирургического инструмента», выпущенном 21 сентября 2010 года, описание которого включено в настоящий документ путем ссылки.
Некоторые хирургические системы обеспечивают роботизированное управление хирургическими инструментами. С помощью минимально инвазивных методов роботизированной хирургии хирургические операции можно выполнять через небольшие разрезы в теле пациента. Роботизированные хирургические системы могут использоваться с различными типами хирургических инструментов, в том числе хирургическими сшивающими инструментами, ультразвуковыми инструментами, электрохирургическими инструментами и/или различными другими типами инструментов, подробное описание которых будет приведено ниже. Примером роботизированной хирургической системы является система DAVINCI™ производства компании Intuitive Surgical, Inc., г. Саннивейл, Калифорния, США. В качестве дополнительного примера, описание одного или нескольких аспектов роботизированных хирургических систем приведено в следующих документах: патенте США № 5,792,135, озаглавленном «Шарнирно повернутый хирургический инструмент для выполнения минимально инвазивных операций с улучшенными функциональными возможностями и чувствительностью», выпущенном 11 августа 1998 года, описание которого включено в настоящий документ путем ссылки; патенте США № 5,817,084, озаглавленном «Устройство удаленного центрального расположения с гибким приводом», выпущенном 6 октября 1998 года, описание которого включено в настоящий документ путем ссылки; патенте США № 5,878,193, озаглавленном «Автоматическая эндоскопическая система для оптимального расположения», выпущенном 2 марта 1999 года, описание которого включено в настоящий документ путем ссылки; патенте США № 6,231,565, озаглавленном «Одноразовые загрузочные элементы (disposable loading unit, DLU) роботизированного рычага для выполнения хирургических задач», выпущенном 15 мая 2001 года, описание которого включено в настоящий документ путем ссылки; патенте США № 6,783,524, озаглавленном «Роботизированный хирургический инструмент с ультразвуковым инструментом для каутеризации и рассечения», выпущенном 31 августа 2004 года, описание которого включено в настоящий документ путем ссылки; патенте США № 6,364,888, озаглавленном «Выравнивание ведущего и подчиненного механизмов в минимально инвазивном хирургическом устройстве», выпущенном 2 апреля 2002 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,524,320, озаглавленном «Система интерфейса механического исполнительного механизма для роботизированных хирургических инструментов», выпущенном 28 апреля 2009 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,691,098, озаглавленном «Манжетный механизм для связи с основной системой прибора», выпущенном 6 апреля 2010 года, описание которого включено в настоящий документ путем ссылки; патенте США № 7,806,891, озаглавленном «Изменение положения и переориентировка отношения ведущего/подчиненного механизмов при минимально инвазивной дистанционной хирургии», выпущенном 5 октября 2010 года, описание которого включено в настоящий документ путем ссылки; и патенте США № 7,824,401, озаглавленном «Хирургический инструмент с однополюсными электрохирургическими концевыми эффекторами», выпущенном 2 ноября 2010 года, описание которого включено в настоящий документ путем ссылки.
Дополнительные примеры инструментов, которые могут быть включены в состав роботизированной хирургической системы, описаны в публикации США № 2013/0012957, озаглавленной «Автоматическая система перезаряжения компонентов концевого эффектора», опубликованной 10 января 2013 года, описание которой включено в настоящий документ путем ссылки; публикации США № 2012/0199630, озаглавленной «Роботизированный хирургический инструмент с возможностью форсированной обратной связи», опубликованной 9 августа 2012 года, описание которой включено в настоящий документ путем ссылки; публикации США № 2012/0132450, озаглавленной «Смещаемый стыковочный элемент выталкивателя для роботизировано контролируемого хирургического инструмента», выпущенной 31 мая 2012 года, описание которой включено в настоящий документ путем ссылки; публикации США № 2012/0199633, озаглавленной «Хирургические сшивающие инструменты с конструкциями с кулачковым приводом для размещения скоб», выпущенной 9 августа 2012 года, описание которой включено в настоящий документ путем ссылки; публикации США № 2012/0199631, озаглавленной «Роботизированная хирургическая система концевого эффектора с электроприводом», выпущенной 9 августа 2012 года, описание которой включено в настоящий документ путем ссылки; публикации США № 2012/0199632, озаглавленной «Роботизированный хирургический инструмент с избирательно шарнирно поворачиваемым концевым эффектором», опубликованной 9 августа 2012 года, описание которой включено в настоящий документ путем ссылки; публикации США № 2012/0203247, озаглавленной «Роботизированная хирургическая система концевого эффектора», выпущенной 9 августа 2012 года, описание которой включено в настоящий документ путем ссылки; публикации США № 2012/0211546, озаглавленной «Стыковочный элемент выталкивателя для функционального соединения управляемого хирургического инструмента с автоматическим устройством», выпущенной 23 августа 2012 г.; публикации США № 2012/0138660, озаглавленной «Кабельные роботизированные хирургические концевые эффекторы», выпущенной 7 июня 2012 года, описание которой включено в настоящий документ путем ссылки; публикации США № 2012/0205421, озаглавленной «Роботизированная хирургическая система концевого эффектора с поворотно активируемыми закрывающими системами», выпущенной 16 августа 2012 года, описание которой включено в настоящий документ путем ссылки; заявке на патент США № 13/443 101, озаглавленном «Управляющий интерфейс для лапароскопического сшивающего аппарата», поданной 10 апреля 2012 года, описание которой включено в настоящий документ путем ссылки; и предварительной заявке на патент США № 61/597,603, озаглавленной «Роботизированные хирургические инструменты», поданной 10 февраля 2012 года, описание которой включено в настоящий документ путем ссылки.
Несмотря на то, что некоторые хирургические инструменты и системы изготавливаются и применяются, считается, что никто до авторов изобретения не создавал или не применял настоящее изобретение, описанное в приложенных пунктах формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Хотя описание завершается формулой изобретения, которая конкретно указывает и четко описывает эту технологию, считается, что данная технология будет более понятна из следующего описания некоторых примеров в сочетании с приложенными рисунками, на которых похожие числовые обозначения идентифицируют одинаковые элементы, причем:
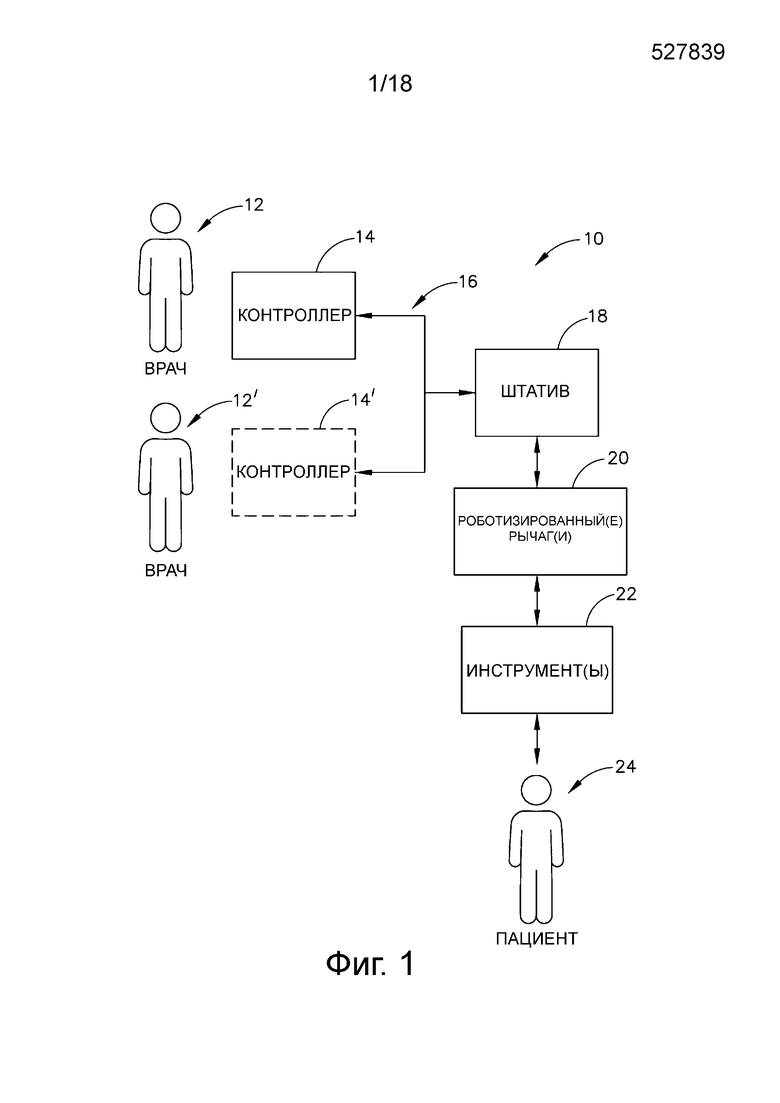
на ФИГ. 1 показана блок-схема примера роботизированной хирургической системы;
на ФИГ. 2 показан вид в перспективе примера контроллера системы, изображенной на ФИГ. 1;
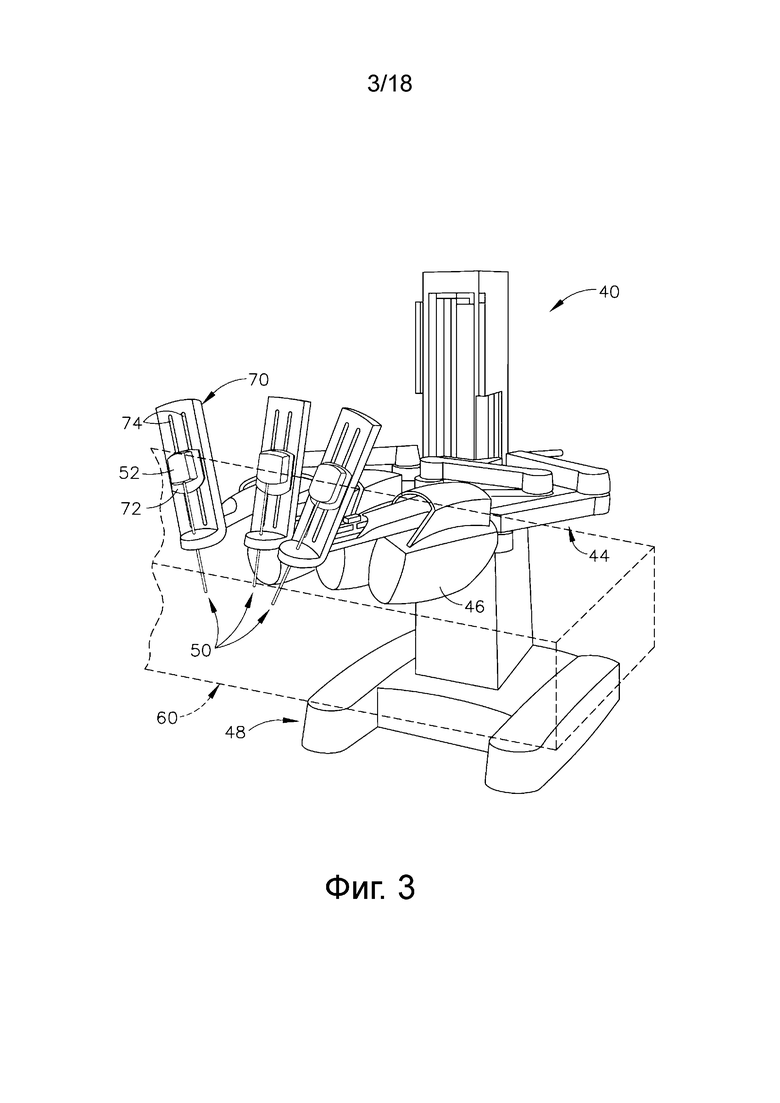
на ФИГ. 3 показан вид в перспективе примера роботизированного штатива системы, изображенной на ФИГ. 1;
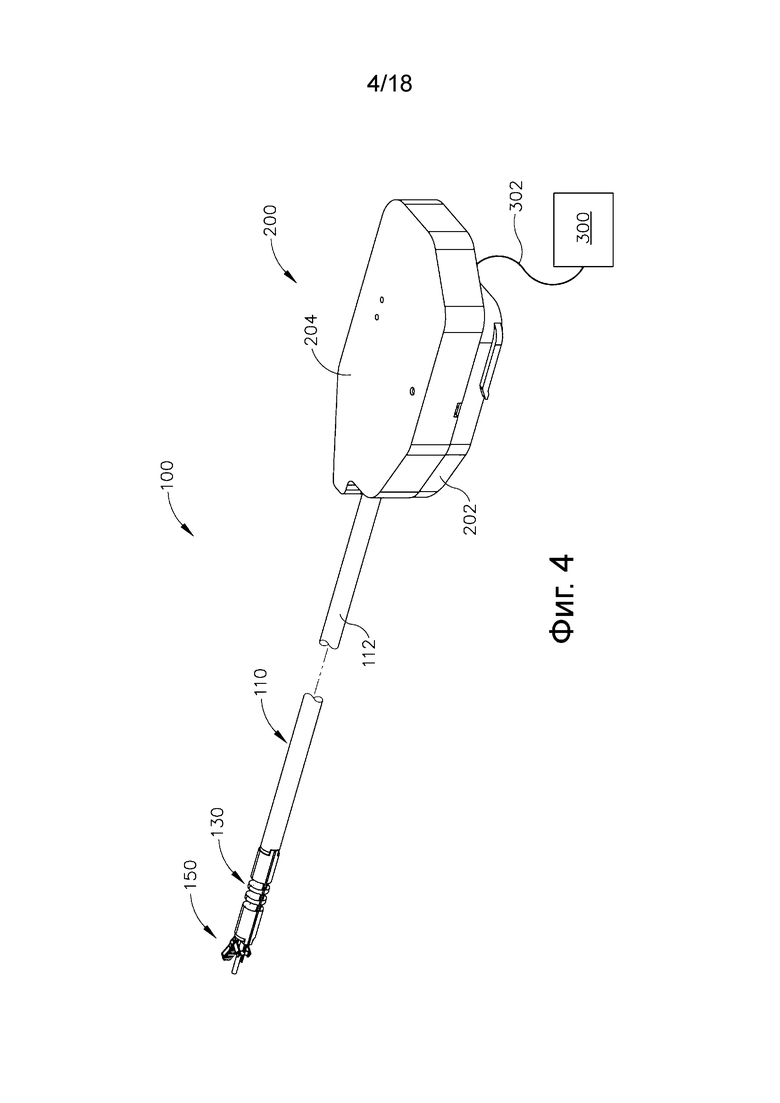
на ФИГ. 4 показан вид в перспективе примера хирургического инструмента, подходящего включения в состав системы, изображенной на ФИГ. 1;
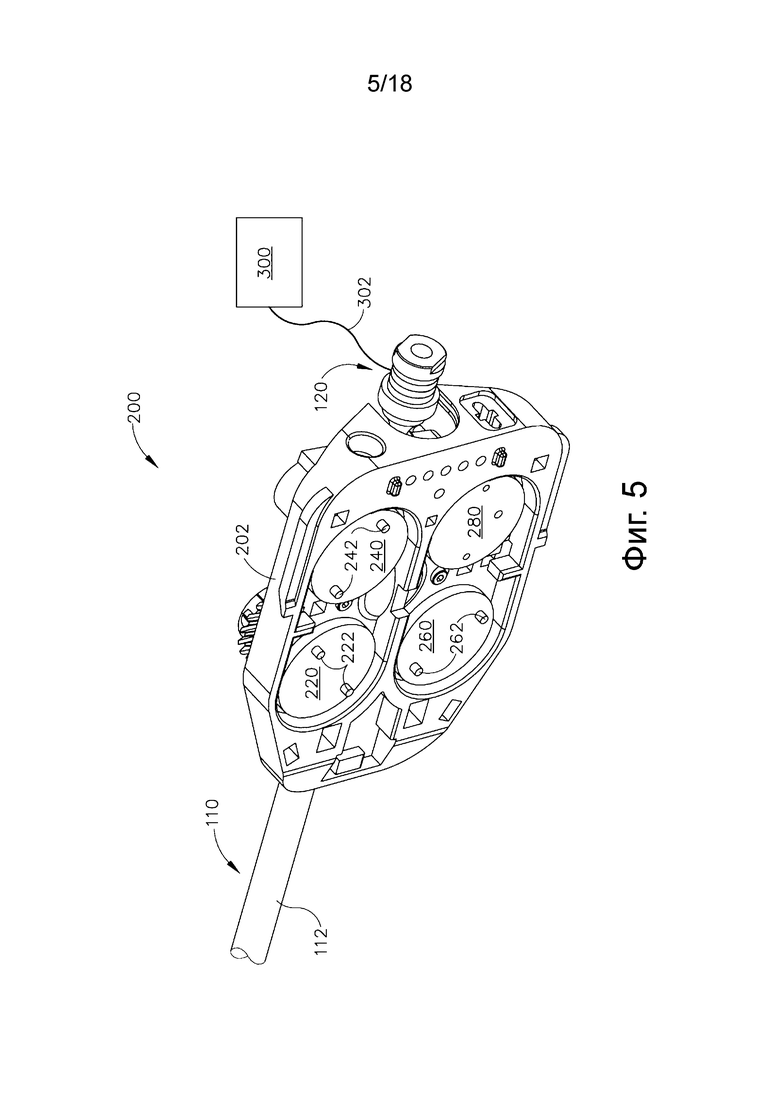
на ФИГ. 5 показан вид в перспективе нижней стороны основания в сборе инструмента, изображенного на ФИГ. 4;
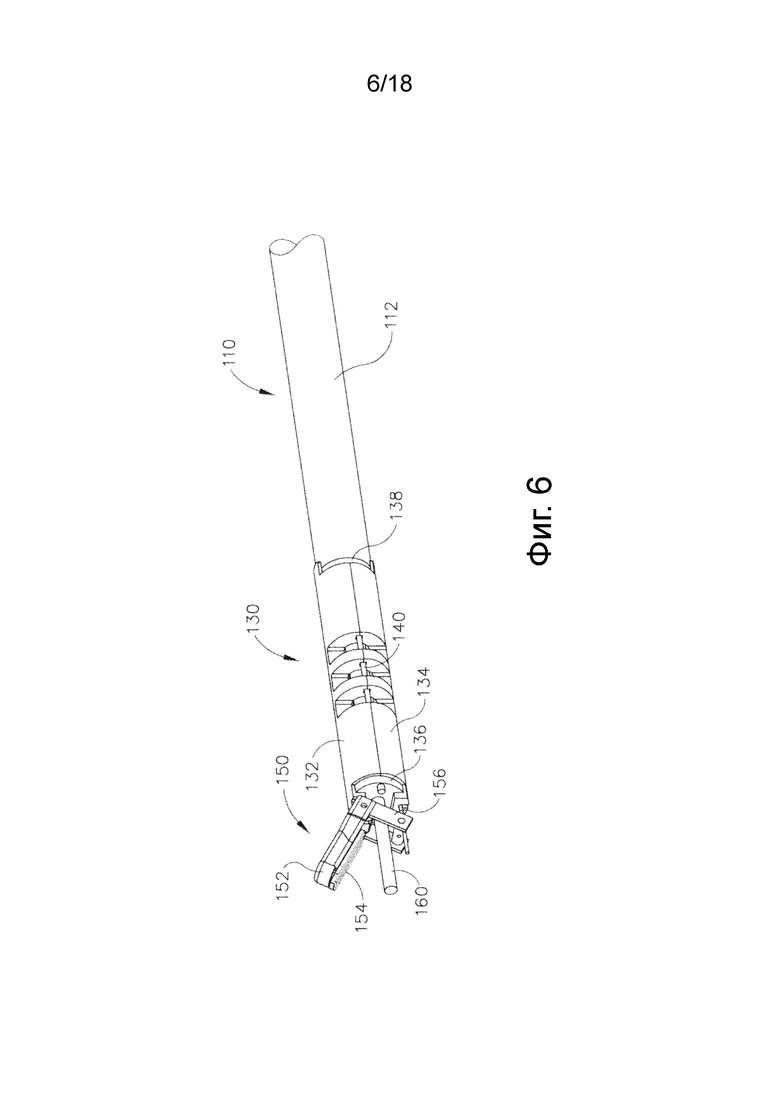
на ФИГ. 6 показан вид в перспективе концевого эффектора и шарнирной части ствола инструмента, изображенного на ФИГ. 4;
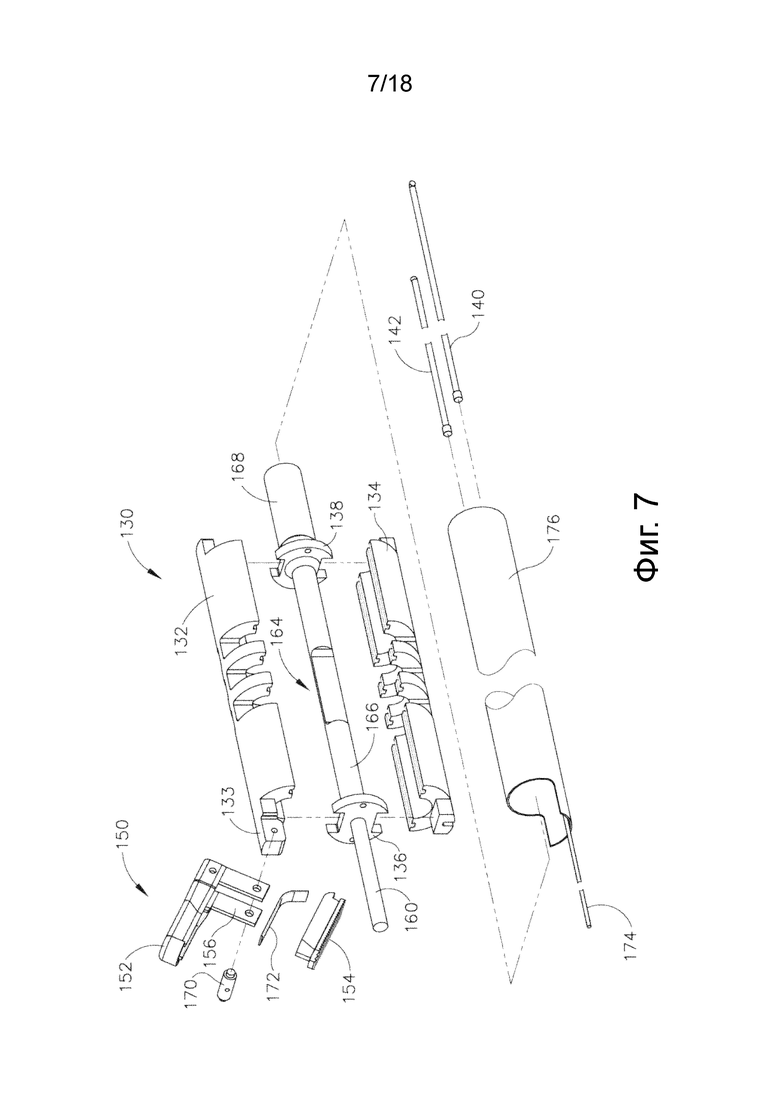
на ФИГ. 7 показан в разобранном виде концевой эффектор и шарнирная часть, изображенные на ФИГ.. 6;
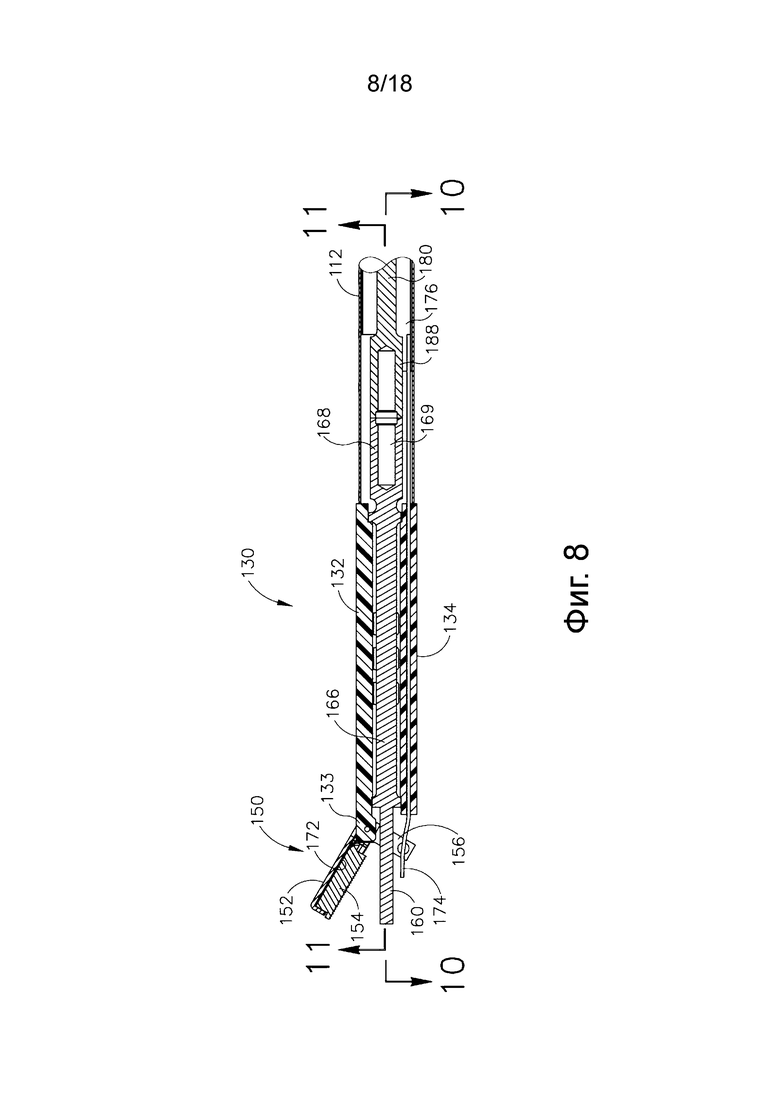
на ФИГ. 8 показан вид сбоку в поперечном сечении концевого эффектора и шарнирной части, изображенных на ФИГ.. 6;
на ФИГ. 9 показан вид в перспективе концевого эффектора и шарнирной части, изображенных на ФИГ.. 6, без кожуха и зажимной пластины;
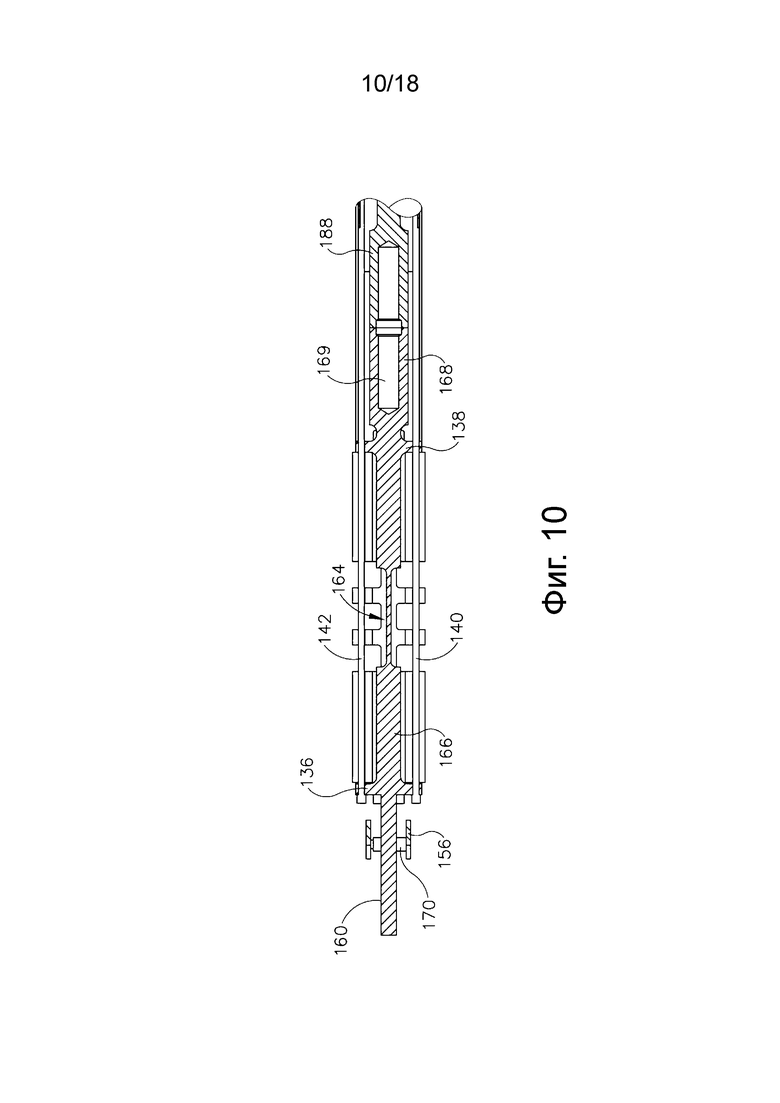
на ФИГ. 10 показано поперечное сечение концевого эффектора и шарнирной части, изображенных на ФИГ. 6, выполненное по линии 10-10 на ФИГ. 8;
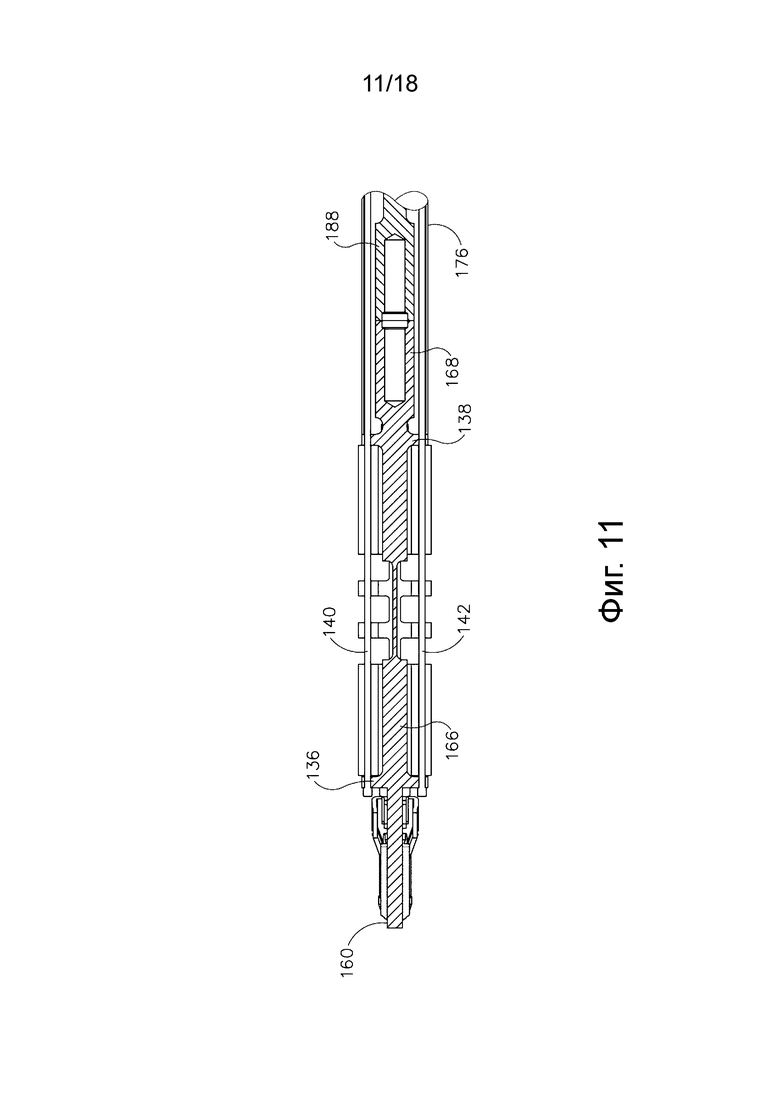
на ФИГ. 11 показано поперечное сечение концевого эффектора и шарнирной части, изображенных на ФИГ. 6, выполненное по линии 11-11 на ФИГ. 8;
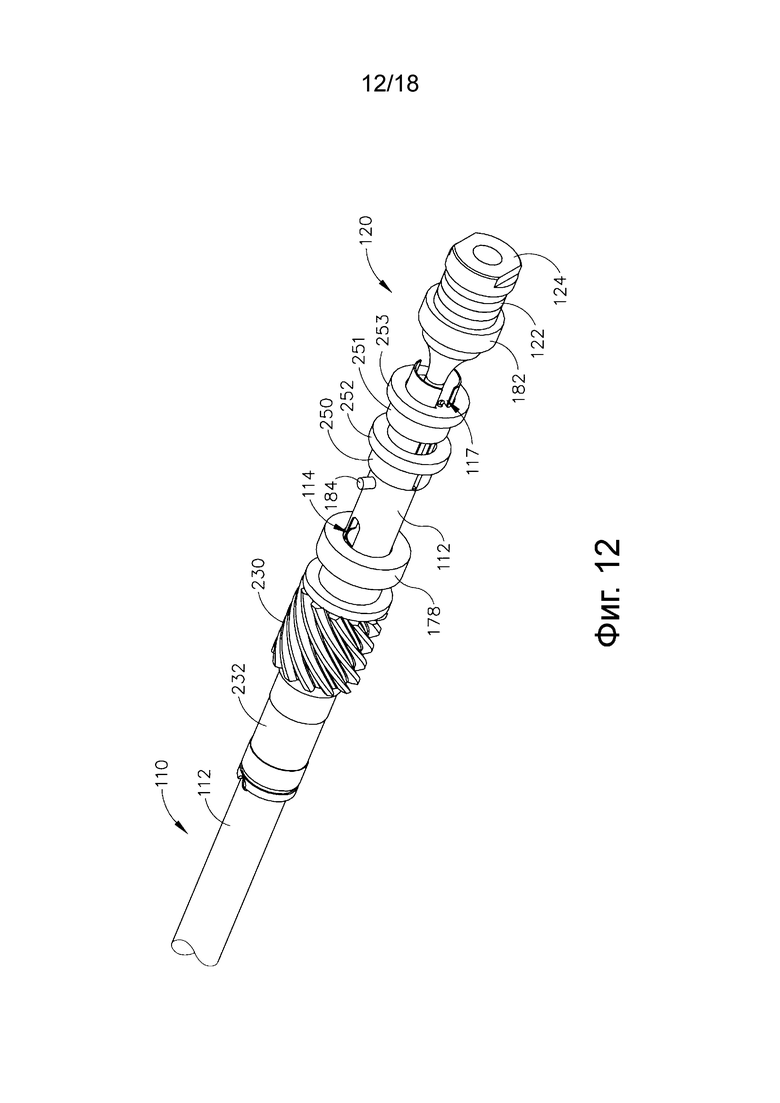
на ФИГ. 12 показан вид в перспективе проксимального конца ствола инструмента, изображенного на ФИГ. 4;
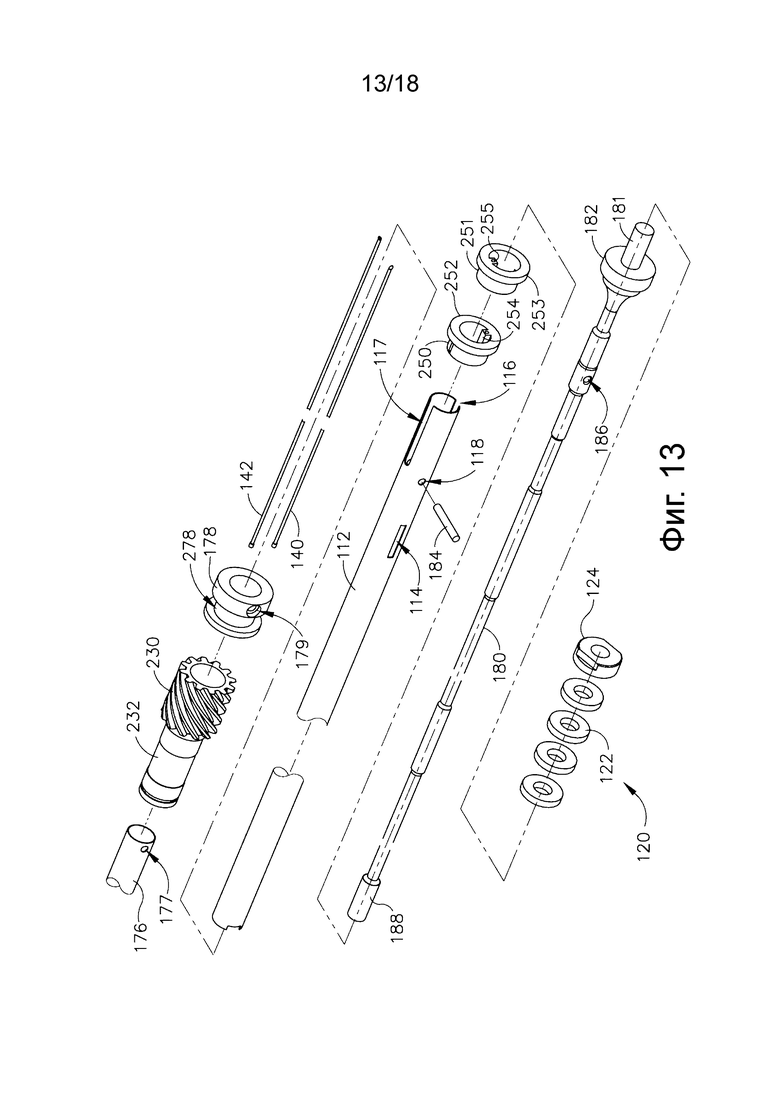
на ФИГ. 13 показан в разобранном виде проксимальный конец ствола инструмента, изображенного на ФИГ. 4;
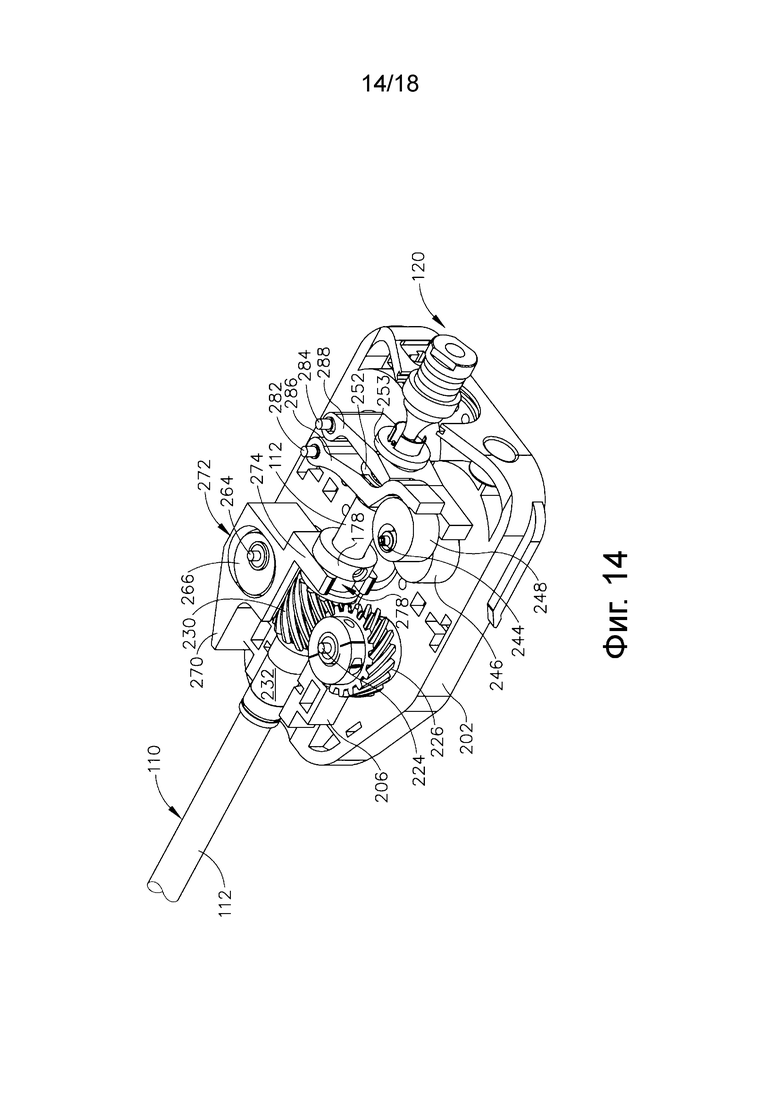
на ФИГ. 14 показан вид в перспективе проксимального конца инструмента, изображенного на ФИГ.4, без кожуха;
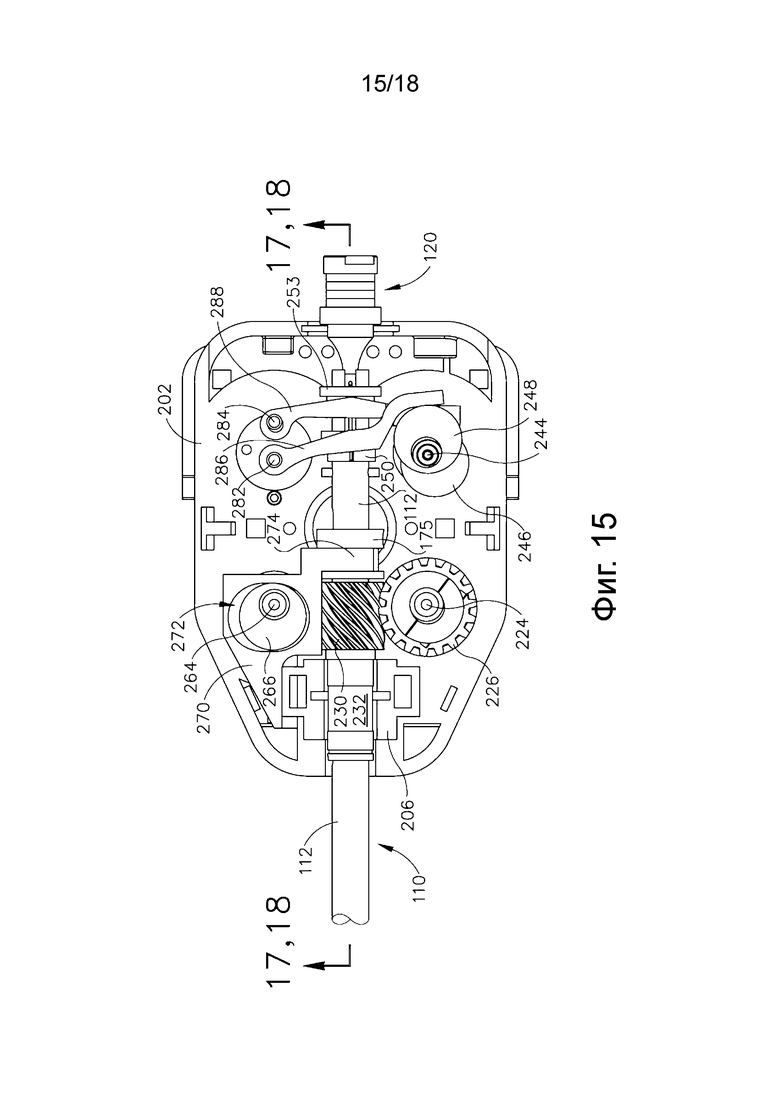
на ФИГ. 15 показан вид сверху проксимального конца инструмента, изображенного на ФИГ.4, без кожуха;
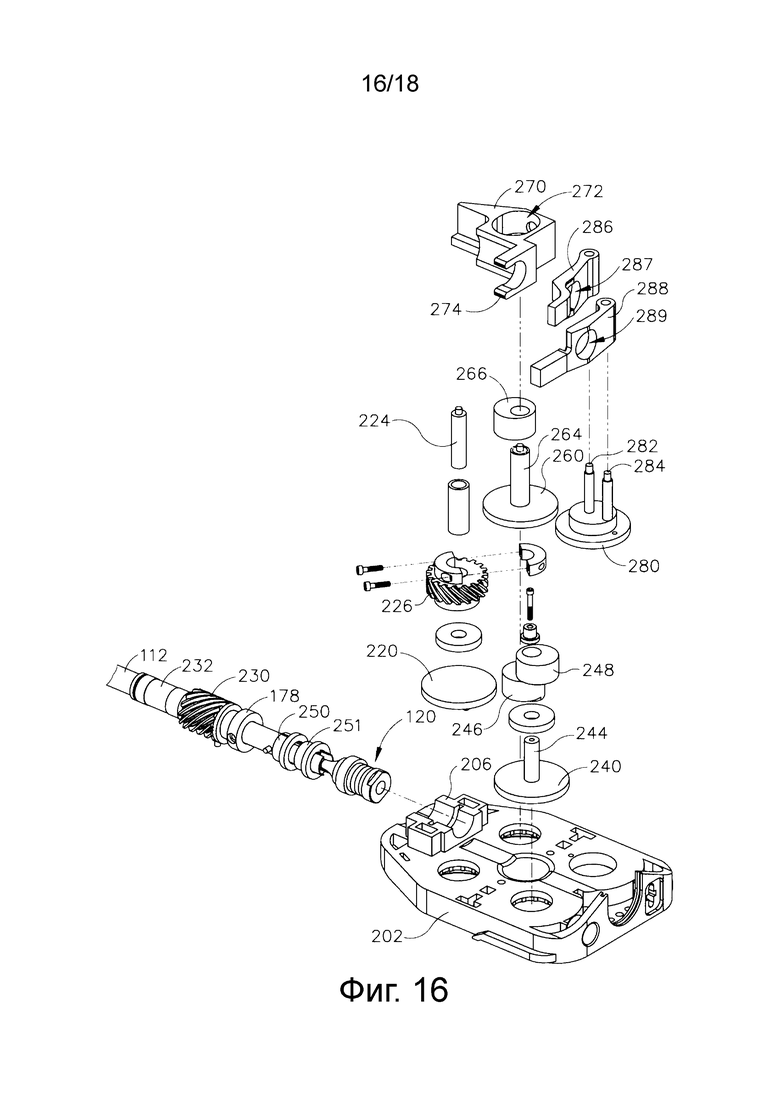
на ФИГ. 16 показан в разобранном виде проксимальный конец инструмента, изображенного на ФИГ.4, без кожуха;
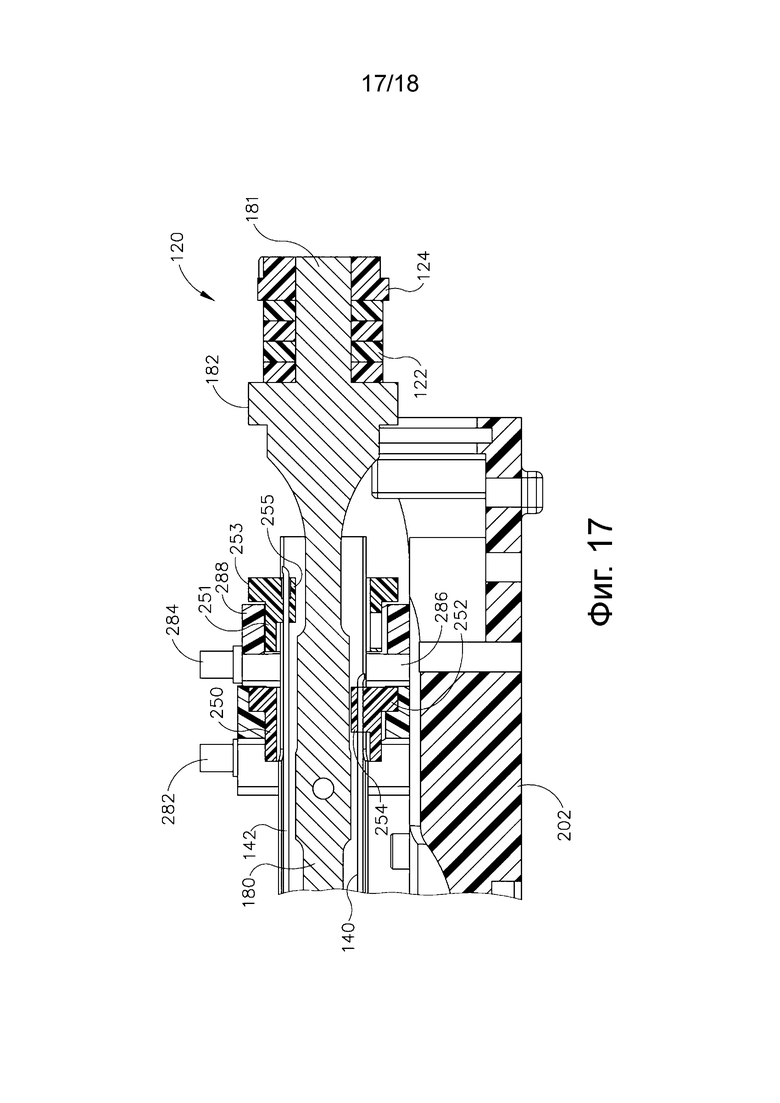
На ФИГ. 17 показан вид сбоку в поперечном сечении проксимальной части проксимального конца инструмента, изображенного на ФИГ. 4, выполненный по линии 17-17 на ФИГ. 15;
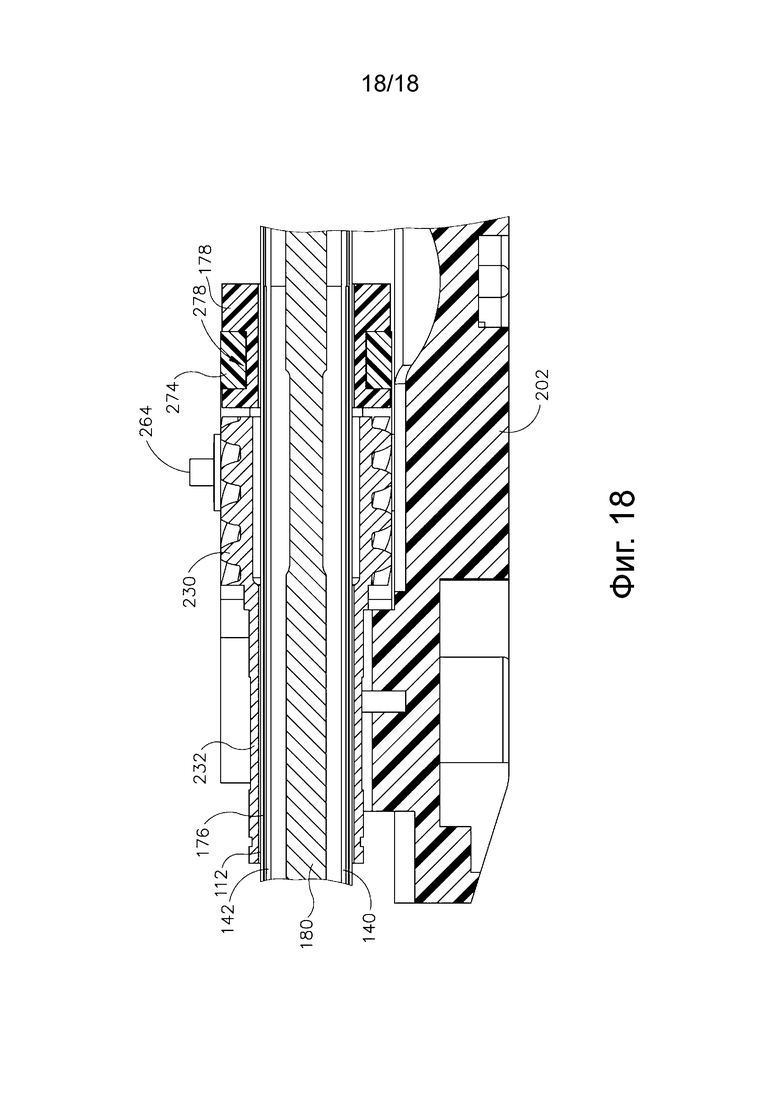
На ФИГ. 18 показан вид сбоку в поперечном сечении дистальной части проксимального конца инструмента, изображенного на ФИГ. 4, выполненный по линии 18-18 на ФИГ. 15;
Предполагается, что фигуры ни в какой степени не являются ограничительными, и считается, что различные варианты осуществления технологии можно реализовать множеством других способов, включая те, которые не обязательно показаны на рисунках. Приложенные фигуры составляют часть описания и включены в него, показывая несколько аспектов настоящей технологии, и вместе с описанием служат для пояснения принципов технологии. Однако следует понимать, что данная технология не ограничена точными показанными конфигурациями.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Следующее описание некоторых примеров технологии не следует использовать для ограничения объема настоящего изобретения. Другие примеры, элементы, аспекты, варианты осуществления и преимущества технологии станут понятны специалистам в данной области из следующего описания, в котором для целей иллюстрации предложен один из лучших способов реализации технологии. После реализации технология, описанная в настоящем документе, может иметь другие разные и очевидные аспекты, все из которых не выходят за рамки технологии. Соответственно, рисунки и описания следует рассматривать как по сути иллюстративные и не ограничивающие.
Дополнительно следует понимать, что любая одна или более из идей, выражений, вариантов осуществления, примеров и т.д., описанных в настоящем документе, могут быть скомбинированы с одной или более из других идей, выражений, вариантов осуществления, примеров и т.д., описанных в настоящем документе. Таким образом, описанные ниже идеи, выражения, варианты осуществления, примеры и т.д. не следует рассматривать в отдельности друг от друга. Различные подходящие способы, в которых можно скомбинировать идеи, представленные в настоящем документе, будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе. Предполагается, что такие модификации и варианты включены в объем формулы изобретения.
Для ясности описания, термины «проксимальный» и «дистальный» определены в настоящем документе относительно роботизированного хирургического привода, состоящего из проксимального корпуса, имеющего интерфейс, который механически и электрически соединяется с хирургическим инструментом, оснащенным дистальным хирургическим концевым эффектором. Термин «проксимальный» относится к положению элемента ближе к корпусу роботизированного хирургического привода, а термин «дистальный» относится к положению элемента ближе к хирургическому концевому эффектору хирургического инструмента и дальше в сторону от корпуса.
I. Обзор примера роботизированной хирургической системы
На ФИГ. 1 показан пример роботизированной хирургической системы (10). Система (10) состоит, как минимум, из одного контроллера (14) и, как минимум, одного штатива (18). Штатив (18) механически и/или электрически соединен с одним или несколькими роботизированными манипуляторами или рычагами (20). Каждый роботизированный рычаг (20) состоит из одного или нескольких хирургических инструментов (22), предназначенных для выполнения различных хирургических задач на пациенте (24). Управление штативом (18), включая рычагами (20) и инструментами (22) может осуществляться врачом (12) с помощью контроллера (14). В некоторых примерах второй врач (12’) также может управлять штативом (18) с помощью второго контроллера (14’) одновременно с первым врачом (12'). Например, каждый врач (12, 12') может управлять различными рычагами (20) штатива или, в некоторых случаях, полное управление штативом (18) может переключаться на одного из врачей (12, 12'). В некоторых примерах на пациенте (24) могут применяться дополнительные штативы (не показано). Эти дополнительные штативы могут управляться с помощью одного или нескольких контроллеров (14, 14').
Штатив(ы) (18) и контроллеры (14, 14') могут быть связаны друг с другом по каналу связи (16), который может быть реализован с помощью любого подходящего типа проводного и/или беспроводного интерфейса связи, по которому передается любой подходящий тип сигнала (например, электрический, оптический, инфракрасный и т.д.) с помощью любого подходящего протокола связи. Канал связи (16) может быть фактическим физическим каналом или логическим каналом, который использует один или несколько фактических физических каналов. Если в качестве канала связи используется логический канал, в качестве физического канала может использовать, канал передачи данных, канал восходящей связи, канал нисходящей связи, волоконно-оптический канал или двухточечное соединение, например, которое используется при построении компьютерной сети для соединения сетевых узлов.
на ФИГ. 2 показан пример контроллера (30), который может использоваться в качестве контроллера (14) системы (10). В этом примере контроллер (30) обычно включает узел пользовательского ввода (32), имеющий элементы прецизионного пользовательского ввода (не показано), которые управляются хирургом и манипулируются в пространстве, пока хирург просматривает хирургическую процедуру на стереоскопическом дисплее (34). Эти элементы узла пользовательского ввода (32) могут включать ручные устройства ввода, которые перемещаются с различными степенями свободы; и которые включают рукоятку с приводом для инструментов с интуитивным управлением (например, для закрытия пилы с захватом, подачи электрического потенциала на электрод и т.д.). Контроллер (30) в настоящем примере также включает набор ножных переключателей (38), обеспечивающих дополнительное управление рычагами (20) и инструментами (22) для хирурга. Дисплей (34) может показывать изображения с одного или нескольких эндоскопов, направленных на операционное поле в теле пациента, и/или другие соответствующие изображения. Кроме того, дисплей (34) может использоваться для просмотра хирургом данных измерителя воздействия (36) и визуального отображения величины усилия, прилагаемого к компоненту инструмента (22) (например, режущему элементу, зажимному элементу и т.д.). Другие наборы датчиков могут использоваться для сигнализации контроллеру (30) наличия кассеты со скобками в концевом эффекторе инструмента (22), перемещения упора инструмента (22) в закрытое положение перед выпуском и/ли других рабочих состояний инструмента (22).
На ФИГ. 3 показан пример роботизированного штатива (40), который может использоваться в качестве штатива (18) системы (10). В этом примере штатив (40) позволяет управлять множеством хирургических инструментов (50). Хотя в этом примере показаны три инструмента (50), на штатив (40) могут устанавливаться любое подходящее количество хирургических инструментов (50). Каждый из хирургических инструментов (50) поддерживается рядом рычажных механизмов, шарнирно поворачиваемых вручную (по существу их называют настраиваемыми соединениями (44)), и роботизированным манипулятором (46). Данные структуры в настоящем документе показаны с защитными чехлами, направленными на большую часть роботизированного рычажного механизма. Эти защитные чехлы могут носить факультативный характер, а также могут быть ограничены в размерах или полностью устранены в некоторых вариантах исполнения для минимизации инерции, с которой сталкиваются элементы сервоприводов, используемые для манипулирования такими устройствами, для ограничения объема движущихся компонентов, чтобы избежать столкновения, и для ограничения общего веса штатива (40).
Каждый роботизированный манипулятор (46) подключается к поворотной, вращающейся инструментальной платформе (70), которая перемещается с помощью манипулятора (46). Каждая платформа состоит из инструментальной панели (72) которая движется вдоль пары направляющих (74) для позиционирования инструмента (50). В этом примере перемещение осуществляется с помощью электропривода. Каждая инструментальная панель (72) состоит из механического и электрического интерфейсов, используемых для подключения к узлу взаимодействия (52) инструмента (50). Только в качестве примера, панель (72) может состоять из четырех поворотных выходов, которые подключаются к сопряженным поворотным входам интерфейсного блока (52). Такие элементы поворотного привода могут использоваться для управления различными операциями инструмента (50), как описано в различных ссылках, приведенных в настоящем документе, и/или как подробно описано ниже. Электрические интерфейсы могут использоваться для установления связи через физический контакт, индукционную муфту и/или иным способом; и могут обеспечивать подачу электропитания для управления одним или несколькими элементами инструмента (50), передачу команд и/или данных на инструмент (50) и/или передачу команд и/или данных с инструмента (50). Различные подходящие способы, с помощью которых инструментальная панель (72) может механически и электрически подключаться к узлу взаимодействия (52) инструмента (50), будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе. Также следует понимать, что инструмент (50) может иметь один или несколько кабелей, которые подключаются к отдельному источнику питания и/или блоку управления и обеспечивают передачу электропитания и/или команд/данных на инструмент (50) и от него.
Штатив (40) в настоящем примере также состоит из основания (48), которое перемещается (например, одним оператором) в установки штатива (40) в выбранное положение относительно пациента. Штатив (40), как правило, может иметь размеры, подходящие для его транспортировки между операционными. Штатив (40) может быть выполнен с возможностью прохода через стандартные двери операционной в стандартные лифты больниц. В некоторых вариантах исполнения автоматизированная система перезарядки инструментов (не показана) также может устанавливаться в рабочей зоне (60) штатива (40) или рядом с ней, для выборочной перезарядки компонентов (например, кассет со скобками и т.д.) инструментов (50).
В дополнение к вышеупомянутому следует понимать, что один или несколько аспектов системы (10) могут быть разработаны в соответствии с, по меньшей мере, некоторыми из идей, представленными в патенте США № 5,792,135; патенте США № 5,817,084; патенте США № 5,878,193; патенте США № 6,231,565; патенте США № 6,783,524; патенте США № 6,364,888; патенте США № 7,524,320; патенте США № 7,691,098; патенте США № 7,806,891; патенте США № 7,824,401; и/или публикации США № 2013/0012957. Описание каждого из указанных выше патентов США и публикаций патентов США включено в настоящий документ путем ссылки. Другие подходящие элементы и функциональности, которые могут быть включены в систему (10), будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе.
II Пример ультразвукового хирургического инструмента с шарнирным элементом
На ФИГ. 4-18 показан пример ультразвукового хирургического инструмента (100) который может использоваться, по меньшей мере, в качестве одного инструмента (50) в системе (10). По меньшей мере, часть инструмента (100) может быть создана и функционировать, по меньшей мере, с некоторыми идеями, представленными в патенте США № 5,322,055; патенте США № 5,873,873; патенте США № 5,980,510; патенте США № 6,325,811; патенте США № 6,783,524; публикации США № 2006/0079874; публикации США № 2007/0191713; публикации США № 2007/0282333; публикации США № 2008/0200940; публикации США № 2010/0069940; публикации США № 2011/0015660; заявке на патент США № 13/538,588; заявке на патент США № 13/657,553; и/или заявке на патент США 61/410,603. Описания каждого из вышеуказанных патентов, публикаций и заявок включены в настоящий документ путем ссылки. Как описано в указанных документах и как будет подробнее описано ниже, инструмент (100) выполнен с возможностью практически одновременно резать и скреплять ткань (например, кровеносный сосуд и т. д.). Иными словами, инструмент (100) работает аналогично сшивающему аппарату типа эндоскопического резца, за исключением того, что инструмент (100) обеспечивает сварку тканей путем применения ультразвуковой энергии колебаний вместо линий скобок для соединения тканей. Эта же ультразвуковая энергия колебаний также разделяет ткани аналогично их рассечению с помощью перемещающегося элемента хирургического ножа. Также следует понимать, что у инструмента (100) могут иметься различные признаки структурного и функционального сходства с ультразвуковыми ножницами HARMONIC ACE®, ультразвуковыми ножницами HARMONIC WAVE®, ультразвуковыми ножницами HARMONIC FOCUS® и/или ультразвуковыми лезвиями HARMONIC SYNERGY®. Более того, у инструмента (100) могут иметься различные структурные и функциональные сходства с устройствами, описанными в любом из других документов, процитированных и включенных в настоящий документ путем ссылки.
В той степени, в которой имеется некоторая степень совпадения между идеями документов, процитированных в настоящем документе, ультразвуковыми ножницами HARMONIC ACE®, ультразвуковыми ножницами HARMONIC WAVE®, ультразвуковыми ножницами HARMONIC FOCUS® и/или ультразвуковыми лезвиями HARMONIC SYNERGY®, а также представленными ниже идеями в отношении инструмента (100), какое-либо из описаний, представленных в настоящем документе, не следует считать предшествующим уровнем техники. Некоторые из идей в этом документе, по существу, выходят за сферу действия идей приведенных ссылок и ультразвуковых ножниц HARMONIC ACE®, ультразвуковых ножниц HARMONIC WAVE®, ультразвуковых ножниц HARMONIC FOCUS® и ультразвуковых лезвий HARMONIC SYNERGY®.
Инструмент (100) в настоящем примере содержит интерфейсный блок (200), ствол (110), шарнирную часть (130) и концевой эффектор (150). Узел взаимодействия (200) подключается к панели (72) роботизированного штатива (40) и осуществляет функцию управления шарнирной частью (130) и концевым эффектором (150), как будет подробно описано ниже. Как будет также подробно описано ниже, инструмент (100) выполнен с возможностью перемещения концевого эффектора (150), обеспечивая его установку в требуемое положение относительно ткани (например, крупного кровеносного сосуда и т.д.) с дальнейшим применением ультразвуковой энергии колебаний к тканям с помощью концевого эффектора (150) для разрезания и скрепления ткани.
Как будет подробно описано ниже, инструмент (100) в настоящем примере состоит из ультразвукового преобразователя (120), который выполнен с возможностью преобразования электрической энергии в ультразвуковые колебания. В некоторых случаях преобразователь (120) получает электропитание непосредственно с панели (72). В некоторых других случаях преобразователь (120) состоит из отдельного кабеля (302), с помощью которого преобразователь (120) непосредственно подключается к генератору (300). Генератор (300) может включать источник питания и блок управления, который выполнен с возможностью передачи на преобразователь (120) того профиля мощности, который конкретно подходит для создания ультразвуковых вибраций при помощи преобразователя (120). Только в качестве примера генератор (300) может содержать GEN 300, продаваемый компанией Ethicon Endo-Surgery, Inc., Цинциннати, Огайо. Кроме того, или альтернативно, генератор (300) может быть сконструирован в соответствии с, по меньшей мере, некоторыми из идей, изложенных в публикации США № 2011/0087212, озаглавленной «Хирургический генератор для ультразвуковых и электрохирургических инструментов», опубликованной 14 апреля 2011 года, описание которой включено в настоящий документ путем ссылки. Генератор (300) может иметь другие подходящие формы, а также обеспечивать различные свойства и функции, которые будут очевидны обычным специалистам в данной области в свете идей, представленных в настоящем документе. Также следует понимать, что, по меньшей мере, часть функциональных возможностей генератора (300) может быть включена непосредственно в узел взаимодействия (200). Только в качестве примера, узел взаимодействия (200) может состоять из встроенной батареи или другого встроенного источника питания, а также любых электронных схем, необходимых для управления параметрами электропитания от батареи или другого встроенного источника питания, подключенного к ультразвуковому преобразователю (120).
A. Пример концевого эффектора и акустической передачи
Как показано на ФИГ. 6-8, концевой эффектор (150) в настоящем примере содержит зажимной рычаг (152) и ультразвуковое лезвие (160). Зажимной рычаг (152) состоит из зажимной пластины (154), которая крепится к нижней стороне зажимного рычага (152) по направлению к лезвию (160). Зажимной рычаг (152) шарнирно соединен с дистально выступающей лапкой (133) первой ребристой части корпуса (132), которая образует элемент шарнирной части (130), как будет подробно описано ниже. Зажимной рычаг (152) выполнен с возможностью поворота по направлению к лезвию (160) и от него в выбранное положение и зажатия ткани между зажимным рычагом (152) и лезвием (160). Пара рычагов (156) выступает в поперечном направлении к зажимному рычагу (152) и крепится к штифту (170), который выступает в продольном направлении между рычагами (156). Стержень (174) крепится к штифту (170). Стержень (174) выступает дистально от закрывающей трубки (176) и как единое целое крепится к закрывающей трубке (176).
Приводное кольцо (178) крепится к проксимальному концу закрывающей трубки (176). В частности, как показано на ФИГ. 13, проксимальный конец закрывающей трубки (176) имеет поперечное отверстие (177), которое выполнено с возможность совмещения с поперечным отверстием (179) приводного кольца (178). Эти отверстия (177, 179) выполнены с возможностью установки стопорного винта (не показан) или другого элемента, который фиксирует приводное кольцо (178) на закрывающей трубке (176). Приводное кольцо (178) может соосно размещаться с возможностью скольжения снаружи кожуха (112); при этом закрывающая трубка (176) может соосно размещаться с возможностью скольжения внутри кожуха (112). Однако кожух (112) имеет паз (114), проходящий в продольном направлении, который выполнен с возможностью установки стопорного винта, который фиксирует приводное кольцо (178) на закрывающей трубке (176). Таким образом, паз (114) позволяет приводному кольцу (178) и закрывающей трубке (176) перемещаться вместе относительно кожуха (112). Положение стопорного винта в пазе (114) также обеспечивает вращение закрывающей трубки (176) и приводного кольца (178) вокруг продольной оси кожуха (112), когда он вращается вдоль своей продольной оси, как подробно описано ниже.
Как будет также подробно описано ниже, узел взаимодействия (200) включает элементы, которые выполнены с возможностью перемещения приводного кольца (178), закрывающей трубки (176) и стержня (174) в продольном направлении относительно кожуха (112) и шарнирной части (130). Следует понимать, что это перемещение приводного кольца (178), закрывающей трубки (176) и стержня (174) обеспечивает поворот зажимного рычага (152) по направлению к лезвию (160) (когда кольцо (178), трубка (176) и стержень (174)) перемещаются в проксимальном направлении); или от лезвия (160) (когда кольцо 178), трубка (176) и стержень (174) перемещаются в дистальном направлении). Стержень (174) имеет достаточную гибкость, чтобы изгибаться вместе с шарнирной частью (130). Однако стержень (174) имеет достаточную прочность на разрыв и сжатие, чтобы перемещать зажимной рычаг (152) когда перемещается стержень (174), независимо от того, находится ли шарнирная часть (130) в прямом или изогнутом положении.
Как показано на ФИГ. 7-8, пластинчатая пружина (172) удерживается между зажимным рычагом (152) и зажимной пластиной (172) и примыкает к дистальной поверхности лапки (133). Пластинчатая пружина (172) упруго смещается, перемещая зажимной рычаг (152) в направлении от лезвия (160) в открытое положение, показанное на ФИГ. 4, 6 и 8. Таким образом, пластинчатая пружина (172) также смещает трубку (176) и стержень (174) в дистальном направлении. Конечно, аналогично другим компонентам, описанным в настоящем документе, пластинчатая пружина (172) может быть при необходимости исключена. Кроме того, зажимной рычаг (152) и зажимная пластина (154) могут быть при необходимости исключены.
Лезвие (160) в настоящем примере выполнено с возможностью колебания на ультразвуковых частотах для обеспечения успешного разрезания и скрепления ткани, в частности, когда ткань зафиксирована между зажимной пластиной (154) и лезвием (160). Лезвие (160) располагается на дистальном конце акустической передачи. Эта акустическая передача состоит из преобразователя (120), жесткого акустического волновода (180) и гибкого акустического волновода (166). Как показано на ФИГ. 5 и 12-17, преобразователь (120) состоит из набора пьезоэлектрических дисков (122), расположенных проксимально к рупору (182) жесткого акустического волновода (180). Пьезоэлектрические диски (122) расположены соосно вдоль проксимально выступающего болта (181), который является цельным компонентом акустического волновода (180), расположенного проксимально к рупору (182). С помощью гайки (124) на болте (181) пьезоэлектрические диски (122) крепятся к жесткому акустическому волноводу (180). Как указывалось выше, пьезоэлектрические диски (122) выполнены с возможностью преобразования электрической энергии в ультразвуковые колебания, которые затем передаются по жесткому акустическому волноводу (180) на лезвие (160). Жесткий акустический волновод (180) лучше всего видно на ФИГ. 13 и 17-18. Как показано на ФИГ. 13, жесткий акустический волновод (180) имеет поперечное отверстие (186), которое дополняет поперечное отверстие (118), выполненное в кожухе (118). Штифт (184) размещается в отверстиях (118, 186) для соединения кожуха (112) с жестким акустическим волноводом (180). Это соединение обеспечивает вращение акустического волновода (180) (и остальной части акустической передачи) вокруг продольной оси кожуха (112), когда он вращается вокруг своей продольной оси, как будет подробно описано ниже. В настоящем примере отверстие (186) размещено в положении, которое соответствует узловой точке, связанной с резонансными ультразвуковыми колебаниями, передаваемыми по жесткому акустическому волноводу (180).
Жесткий акустический волновод (180) дистально заканчивается в соединении (188), как показано на ФИГ. 8-11 и 13. Соединение (188) крепится к соединению (168) с помощью болта с двухзаходной резьбой (169). Соединение (168) расположено на проксимальном конце гибкого акустического волновода (166). Как показано на ФИГ. 7-11, гибкий акустический волновод (166) состоит из дистального фланца (136), проксимального фланца (138) и суженной части (164), расположенной между фланцами (138). В настоящем примере фланцы (136, 138) размещены в положениях, которые соответствуют узловым точкам, связанным с резонансными ультразвуковыми колебаниями, передаваемыми по гибкому акустическому волноводу (166). Суженная часть (164) позволяет гибкому акустическому волноводу (166) сгибаться, практически не влияя на способность гибкого акустического волновода (166) передавать ультразвуковые колебания. Только в качестве примера, суженную часть (164) можно реализовать в соответствии с одной или несколькими идеями, представленными в заявке на патент США № 13/538,588; и/или заявке на патент США № 13/657,553, описания которых включены в настоящий документ путем ссылки. Следует понимать, что волновод (166, 180) может быть выполнен с возможностью усиления механических колебаний, передаваемых по волноводу (166, 180). Кроме того, волновод (166, 180) может иметь приспособления для управления усилением продольных колебаний, передаваемых по волноводу (166, 180) и/или приспособления для настройки волновода (166, 180) на резонансную частоту системы.
В настоящем примере дистальный конец лезвия (160) размещен в положении, соответствующем пучности, связанной с резонансными ультразвуковыми колебаниями, передаваемыми по гибкому акустическому волноводу (166), чтобы настраивать акустический узел на предпочтительную резонансную частоту fo, когда акустический узел не нагружен тканью. Когда преобразователь (120) находится под напряжением, дистальный конец лезвия (160) выполнен с возможностью перемещения продольно в диапазоне, например, от около 10 до 500 микрон от пика к пику и в некоторых случаях в диапазоне от около 20 до 200 микрон с предустановленной частотой вибрации fo, например 55,5 кГц. При активации преобразователя (120) в настоящем примере эти механические колебания передаются по волноводам (166, 180), достигая лезвия (160), таким образом обеспечивая колебание лезвия (160) с резонансной ультразвуковой частотой. Таким образом, когда ткань зафиксирована между лезвием (160) и зажимной пластиной (154), ультразвуковое колебание лезвия (160) может одновременно отделять ткань и денатурировать белки в прилегающих клетках ткани, тем самым обеспечивая коагулирующий эффект с относительно небольшим распространением тепла. В некоторых вариантах электрический ток можно проводить по лезвию (160) и зажимному рычагу (154), чтобы дополнительно прижигать ткань. Несмотря на то, что были описаны некоторые конфигурации для блока акустической передачи и преобразователя (120), другие подходящие конфигурации для блока акустической передачи и преобразователя (120) будут очевидны для тех, кто обладает соответствующими навыками технологии в отношении представленных идей. Аналогично другие подходящие конфигурации для концевого рабочего органа (150) будут очевидны для тех, кто обладает соответствующими навыками технологии в отношении представленных идей.
B. Пример ствола и шарнирной части
Ствол (110) в настоящем примере выступает дистально от интерфейсного блока (200). Шарнирная часть (130) расположена на дистальном конце ствола (110) с концевым эффектором (150), расположенным дистально к шарнирной части (130). Ствол (110) состоит из кожуха (112), который закрывает элементы привода и вышеописанные элементы акустической передачи, которые соединяют узел взаимодействия (200) с шарнирной частью (130) и концевым эффектором (150). Ствол (110) вращается вокруг продольной оси, определенной кожухом (112), по отношению к узлу взаимодействия (200). При этом концевой эффектор (150), шарнирная секция (130) и ствол (110) могут вращаться одновременно. Конечно, функцию вращения при необходимости можно опустить.
Шарнирная часть (130) позволяет выборочно устанавливать концевой эффектор (150) с различными угловыми упреждениями по отношению к продольной оси, определяемой кожухом (112). Шарнирная часть (130) может иметь различные формы. Только в качестве примера, шарнирную часть (130) можно реализовать в соответствии с одной или несколькими идеями, представленными в публикации США № 2012/0078247, описание которой включено в настоящий документ путем ссылки. Только в качестве еще одного примера, шарнирную часть (130) можно реализовать в соответствии с одной или несколькими идеями, представленными в заявке на патент США № 13/538,588; и/или заявке на патент США № 13/657,553, описания которых включены в настоящий документ путем ссылки. Различные другие подходящие формы таких шарнирных частей (130) очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Также следует понимать, что некоторые исполнения инструмента (10) могут просто не иметь шарнирной части (130).
Как показано на ФИГ. 6-11, шарнирная часть (130) в настоящем примере состоит из первой ребристой части кожуха (132) и второй ребристой части кожуха (134) с парой связок шарнирного соединения (140, 142), выступающих через каналы, выполненные в местах соединения ребристых частей кожуха (132, 134). Ребристые части кожуха (132, 134) в основном расположены в продольном направлении между фланцами (136, 138) гибкого акустического волновода (166). Дистальные концы связок шарнирного соединения (140, 142) как единое целое крепятся к дистальному фланцу (136). Связки шарнирного соединения (140, 142) также проходят через проксимальный фланец (138), при этом они могут перемещаться относительно проксимального фланца (138).
Проксимальный конец связки шарнирного соединения (140) закреплен на первом приводном кольце (250), а проксимальный конец связки шарнирного соединения (142) закреплен на втором приводном кольце (251). Как показано на ФИГ. 13 и 17, первое приводное кольцо (250) состоит из кольцеобразного фланца (252) и направленного вовнутрь крепежного элемента (254); второе приводное кольцо (251) также имеет кольцеобразный фланец (253) и направленный вовнутрь крепежный элемент (255). Проксимальный конец связки шарнирного соединения (140) жестко закреплен на крепежном элементе (254), а проксимальный конец связки шарнирного соединения (142) жестко закреплен на втором крепежном элементе (255). Приводные кольца (250, 251) расположены с возможностью перемещения вокруг проксимального конца кожуха (112). Кожух (112) имеет пару пазов (116, 117), проходящих в продольном направлении, которые выполнены с возможностью установки крепежных элементов (254, 255) соответственно. Таким образом, пазы (116, 117) позволяют приводным кольцам (250, 251) перемещаться относительно кожуха (112). Положение крепежных элементов (254, 255) в пазах (116, 117) также обеспечивает вращение колец (250, 251) и связок шарнирного соединения (140, 142) вокруг продольной оси кожуха (112), когда он вращается вдоль своей продольной оси, как подробно описано ниже.
Как будет подробно описано ниже, узел взаимодействия (200) выполнен с возможностью выборочного смещения одной связки шарнирного соединения (140, 142) в проксимальном направления путем смещения приводного кольца (250) в проксимальном направлении; при этом обеспечивается одновременное перемещение другой связки шарнирного соединения (140, 142) и приводного кольца (251) в дистальном направлении. Следует понимать, что при смещении одной связки шарнирного соединения (140, 142) в проксимальном направлении происходит изгиб шарнирной части (130) и отклонение концевого эффектора (150) в продольном направлении от продольной оси ствола (110) под углом поворота. В частности, концевой эффектор (150) будет поворачиваться по направлению к любой связке шарнирного соединения (140, 142), которая смещается проксимально; Во время такого поворота другая связка шарнирного соединения (140, 142) смещается дистально фланцем (136). Ребристые части кожуха (132, 134) и суженная часть (164) имеют достаточную гибкость, обеспечивая вышеописанный поворот концевого эффектора (150).
C. Пример интерфейсного блока роботизированного рычага
На ФИГ. 5 и 14-18 подробно показан узел взаимодействия (200) в этом примере. Как показано, узел взаимодействия (200) содержит основание (202) и кожух (204). Необходимо отметить, что кожух (204) показан только на ФИГ. 4 и не показан на ФИГ. 5 14-18 для ясности. Корпус (204) состоит из кожуха, который просто закрывает компоненты привода. В некоторых вариантах исполнения корпус (204) также имеет электронную плату, микросхему и/или другие элементы которые выполнены с возможностью идентификации инструмента (100).
Основание (202) выполнено с возможностью подключения к панели (72) штатива (40). Хотя это не показано, следует понимать, что основание (202) также может иметь один или несколько электрических контактов и/или других элементов, обеспечивающих установление электрической связи с сопряженными элементами панели (72). Опорная конструкция ствола (206) выступает вверх от основания (202) и обеспечивает опору для ствола (110) (при этом обеспечивая возможность вращения ствола (110)). Только в качестве примера, опорная конструкция ствола (206) может состоять из втулки, подшипников и/или других элементов, которые обеспечивают вращение ствола (110) относительно опорной конструкции (206). Как показано на ФИГ. 5, основание (202) также имеет три приводных диска (220, 240, 260), которые могут поворачиваться относительно основания (202). Каждый диск (220, 240, 260) включает соответствующую пару цельных штифтов (222, 242, 262), которые входят в сопряженные углубления (не показано) в приводных элементах панели (72). В некоторых вариантах исполнения один штифт (222, 242, 262) каждой пары расположен рядом с осью вращения соответствующего диска (220, 240, 260) для обеспечения правильной угловой ориентации диска (220, 240, 260) относительно соответствующего приводного элемента панели (72).
Как показано на ФИГ. 14-16, приводной стержень (224, 244, 264) как единое целое выступает вверх от каждого диска (220, 240, 260) . Как будет подробно описано ниже, диски (220, 240, 260) управляются независимо и обеспечивают независимое вращение ствола (110), изгиб шарнирной части (130) и перемещение закрывающей трубки (176) путем независимого вращения приводных стержней (224, 244, 264). Основание (202) также имеет неактивный диск (280), который не вращается и не приводит в движение никакие компоненты. Пара фиксированных осей шарниров (282, 284) как единое целое выступает вверх от диска (280) .
Как показано на ФИГ. 14-16, первая косозубая шестерня (226) жестко закреплена на приводном стержне (224) таким образом, что вращение соответствующего диска (220) обеспечивает вращение первой косозубой шестерни (226). Первая косозубая шестерня (226) входит в зацепление с второй косозубой шестерней (230), которая как единое целое закреплена на втулке (232). Втулка (232) как единое целое крепится к кожуху (112); Таким образом, вращение первой косозубой шестерни (226) обеспечивает вращение ствола (110). Следует понимать, что вращение первой косозубой шестерни (226) вокруг первой оси преобразуется во вращение второй косозубой шестерни (230) вокруг второй оси, которая расположена перпендикулярно первой оси. Вращение по часовой стрелке второй косозубой шестерни (230) (если смотреть сверху вниз) приводит к вращению по часовой стрелке ствола (110) (если смотреть с дистального конца ствола (110) по направлению к проксимальному концу ствола (110)), в зависимости от ориентации винтовой нарезки косозубых шестерен (226, 230). Вращение против часовой стрелки второй косозубой шестерни (132) (если смотреть сверху вниз) приводит к вращению против часовой стрелки ствола (110) (если смотреть с дистального конца ствола (110) по направлению к проксимальному концу ствола (110)), также в зависимости от ориентации винтовой нарезки косозубых шестерен (226, 230). Поэтому следует понимать, что ствол (110) может приводиться в движение путем вращения приводного стержня (224). Другие подходящие способы, с помощью которых ствол (110) может вращаться, будут понятны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
Также как показано на ФИГ. 14-16, пара эксцентриковых кулачков (246, 248) жестко закреплена на приводном стержне (244) таким образом, что вращение соответствующего диска (240) обеспечивает вращение кулачков (246, 248). Оба кулачка (246, 248) установлены эксцентрично по отношению к приводному стержню (244) таким образом, что продольные оси кулачков (246, 248) смещены относительно продольных осей приводного стержня (244), но при этом параллельны им. Кроме того, кулачки (246, 248) смещены противоположным образом так, что они выступают в продольном направлении относительно приводного стержня (244) в противоположных направлениях. Кулачки (246, 248) расположены так им образом, чтобы приводить в движение поворотные стержни (286, 288). Поворотный рычаг (286) шарнирно соединен с осью шарнира (282), а поворотный рычаг (288) шарнирно соединен с осью шарнира (284). Первое приводное кольцо (250) проходит через отверстие (287), выполненное в первом приводном рычаге (286), а второе приводное кольцо (251) проходит через отверстие (289), выполненное во втором приводном рычаге (288). Оба фланца (252, 253) имеют наружный диаметр, который больше внутреннего диаметра соответствующего отверстия (287, 289). Таким образом, фланцы (252, 253) ограничивают дистальное перемещение колец (250, 251) относительно соответствующих приводных рычагов (286, 288).
При вращении приводного стержня (244) один из кулачков (246, 248) проксимально упирается в соответствующий рычаг (286, 288) в зависимости о расположения этих компонентов и углового положения кулачков (246, 248) в момент вращения. В некоторых случаях кулачок (246) проксимально перемещает приводной рычаг (288) таким образом, что рычаг (288) поворачивается против часовой стрелки (если смотреть сверху вниз) вокруг оси (284). Рычаг (288) упирается во фланце (253) во время такого поворота, проксимально перемещая кольцо (251) и связку шарнирного соединения (142). Это проксимальное перемещение связки шарнирного соединения (142) приводит к изгибу шарнирной части (130) и отклонению концевого эффектора (150) по направлению к связке (142). При изгибе шарнирной части (130) связка шарнирного соединения (140) дистально перемещается, что в свою очередь приводит к дистальному перемещению кольца (250) и его фланца (252). При дистальном перемещении фланца (252) происходит дистальное перемещение приводного рычага (286) таким образом, что рычаг (286) поворачивается по часовой стрелке (если смотреть сверху вниз) вокруг оси (282). Кулачок (248) находится в положении, которое позволяет выполнить рычагу (286) такой дистальный поворот. По мере вращения приводного стержня (244) (или если приводной стержень (244) вращается в противоположном направлении) вышеуказанное перемещение в конечном итоге изменит направление. Иными словами, кулачок (248) может проксимально перемещать рычаг (286), а кулачок (246) позволяет рычагу (288) дистально поворачиваться во время изгиба шарнирной части (130), обеспечивая наклон концевого эффектора (150) по направлению к связке (140). Поэтому следует понимать, что шарнирная часть (130) может приводиться в движение путем вращения приводного стержня (244). Другие подходящие способы приведения приводного штока (130) в действие будут понятны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
Также как показано на ФИГ. 14-16, эксцентриковый кулачок (266) жестко закреплен на приводном стержне (264) таким образом, что вращение соответствующего диска (260) обеспечивает вращение кулачков (266). Оба кулачка (266) установлены эксцентрично по отношению к приводному стержню (264) таким образом, что продольная ось кулачка (266) смещена относительно продольной оси приводного стержня (264), но при этом параллельна ей. Кулачок (266) расположен в продолговатом отверстии (272), выполненном в рейке (270), которая перемещается относительно основания (202). Рейка (270) имеет выступающую в продольном направлении вилку (274). Вилка (274) расположена в круговой канавке (278) приводного кольца (178), которое закреплено на закрывающей трубке (176), как отмечалось выше. Конфигурация кулачка (266) и отверстия (272) обеспечивает взаимосвязь, посредством которой рейка (270) перемещается в продольном направлении в ответ на вращение приводного стержня (264) и кулачка (266). Это перемещение рейки (270) обеспечивает перемещение закрывающей трубки (176) за счет зацепления вилкой (274) и приводным кольцом (178) и зацепления между приводным кольцом (178) и закрывающей трубкой (176). Поэтому следует понимать, что зажимной рычаг (152) можно сместить в выбранное положение в направлении от лезвия (160) или к нему путем вращения приводного стержня (264). Другие подходящие способы приведения зажимного рычага (152) в действие будут понятны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
D. Пример операции
При обычном использовании штатив (40) используют для введения концевого эффектора (150) в тело пациента через троакар. Шарнирная часть (130) практически прямая, и зажимной рычаг (152) поворачивается по направлению к лезвию (160), когда концевой эффектор (150) и часть ствола (110) вставляют через троакар. Приводной стержень (224) можно вращать с помощью приводных элементов панели (72), которые соединены с соответствующим диском (220), для установки концевого эффектора (150) в требуемое угловое положение относительно ткани. Приводной стержень (244) можно затем вращать с помощью приводных элементов панели (72), которые соединены с соответствующим диском (240) для поворота или изгибания шарнирной части (130) ствола (110) с целью установки концевого эффектора (150) в требуемое положение и ориентацию по отношению к анатомической структуре внутри пациента. Приводной стержень (264) можно затем вращать с помощью приводных элементов панели (72), которые соединены с соответствующим диском (260), для поворота зажимного рычага (152) в направлении от лезвия (160) и открытия концевого эффектора (150).
Ткань анатомической структуры затем фиксируется между зажимной пластиной (154) и лезвием (160) путем вращения приводного стержня (264) и перемещения в дистальном направлении закрывающей трубки (176), приведя в действие приводные элементы панели (72), которые соединены с соответствующим диском (260). В некоторых случаях это включает эффектор двух слоев ткани, образующих часть естественного просвета анатомической структуры (например, кровеносного сосуда, части желудочно-кишечного тракта, части репродуктивной системы и т.д.) в теле пациента; при этом следует понимать, что инструмент (100) может использоваться на различных типах тканей и анатомических расположениях. Когда ткань зафиксирована между зажимной пластиной (154) и лезвием (160), преобразователь (120) активируется и обеспечивает подачу ультразвуковых колебаний на лезвие (160). Лезвие одновременно рассекает ткань и денатурирует белки в смежных клетках ткани, таким образом обеспечивая коагулирующий эффект с относительно небольшим распространением тепла.
Вышеописанная операция ствола (110), шарнирной части (130) и концевого эффектора (150) может быть повторена необходимое количество раз на различных участках в теле пациента. Когда оператору необходимо извлечь концевой эффектор (150) из тела пациента, приводной стержень (244) можно повернуть с помощью приводных элементов панели (72), которые соединены с соответствующим диском (240), чтобы выпрямить шарнирную часть (130). Приводной стержень (264) можно вращать с помощью приводных элементов панели (72), которые соединены с соответствующим диском (260), для поворота зажимного рычага (152) к лезвию (160) и закрытия концевого эффектора (150). Штатив (40) затем используется для извлечения концевого эффектора (150) из тела пациента и троакара. Другие подходящие возможности эксплуатации инструмента (100) будут понятны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
III. Прочая информация
Следует понимать, что любое исполнение инструментов, описанных в настоящем документе, может включать различные другие элементы, в дополнение к тем, которые описаны выше, или вместо них. Только в качестве примера, любой из инструментов, описанных в настоящем документе, также может включать один или более различных элементов, описанных в любом из различных документов, включенных в настоящий документ путем ссылки.
Хотя примеры описаны здесь в основном в контексте электрохирургических инструментов, следует понимать, что различные идеи, приведенные в настоящем документе, могут быть легко применены к целому ряду других типов медицинских инструментов. Только в качестве примера различные идеи, приведенные в настоящем документе, могут быть легко применены к другим видам электрохирургических инструментов, эффекторам для тканей, инструментам для забора тканей, хирургическим сшивающим инструментам, хирургическим клипсонакладывателям, ультразвуковым хирургическим инструментам и т.д.
В вариантах исполнения, для которых идеи, представленные в настоящем документе, применяются к электрохирургическим инструментам, следует понимать, что эти идеи могут быть легко применены к устройству для наложения лигатур ENSEAL® производства компании Ethicon Endo-Surgery, Inc., г. Цинциннати, штат Огайо, США. Кроме того или альтернативно, следует понимать, что идеи, представленные в настоящем документе, могут легко комбинироваться с идеями, представленными в одном или нескольких следующих документах: патент США № 6,500,176, озаглавленный «Электрохирургические системы и методы наложения лигатур», выданный 31 декабря 2002 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,112,201, озаглавленный «Электрохирургический инструмент и способ применения», выданный 26 сентября 2006 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,125,409, озаглавленный «Электрохирургический рабочий наконечник для контролируемой доставки энергии», выданный 24 октября 2006 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,169,146 озаглавленный «Электрохирургический зонд и способ применения», выданный 30 января 2007 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,186,253, озаглавленный «Электрохирургический эффектор для контролируемой доставки энергии», выданный 6 марта 2007 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,189,233, озаглавленный «Электрохирургический инструмент», выданный 13 марта 2007 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,220,951, озаглавленный «Хирургические скрепляющие поверхности и способы применения», выданный 22 мая 2007 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,309,849, озаглавленный «Полимерные составы с положительным температурным коэффициентом и способы изготовления», выданный 18 декабря 2007 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,311,709, озаглавленный «Электрохирургический инструмент и способ применения», выданный 25 декабря 2007 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,354,440, озаглавленный «Электрохирургический инструмент и способ применения», выданный 8 апреля 2008 года, описание которого включено в настоящий документ путем ссылки; патент США № 7,381,209, озаглавленный «Электрохирургический инструмент», выданный 3 июня 2008 года, описание которого включено в настоящий документ путем ссылки; публикация США № 2011/0087218, озаглавленная «Хирургический инструмент, состоящий из первой и второй приводных систем, запускаемых общим спусковым механизмом», опубликованная 14 апреля 2011 года, описание которой включено в настоящий документ путем ссылки; публикация США № 2012/0116379, озаглавленная «Электрохирургическое устройство с приводом от электродвигателя с механической и электрической обратной связью», опубликованная 10 мая 2012 года, описание которой включено в настоящий документ путем ссылки; публикация США № 2012/0078243, озаглавленная «Элементы управления для шарнирного хирургического устройства», опубликованная 29 марта 2012 года, описание которой включено в настоящий документ путем ссылки; публикация США № 2012/0078247, озаглавленная «Элементы шарнирного соединения для шарнирного хирургического устройства », опубликованная 29 марта 2012 года, описание которой включено в настоящий документ путем ссылки; публикация США № 2013/0030428, озаглавленная «Хирургический инструмент с многофазным смещением спускового механизма», опубликованная 31 января 2013 года, описание которой включено в настоящий документ путем ссылки; публикация США № 2013/0023868, озаглавленная «Хирургический инструмент с интегрированным двухвинтовым приводом», опубликованная 31 января 2013 года, описание которой включено в настоящий документ путем ссылки; Другие подходящие способы, с помощью которых идеи, представленные в настоящем документе, могут быть применены к электрохирургическим инструментам, будут понятны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
В вариантах исполнения, для которых идеи, представленные в настоящем документе, применяются к хирургическим сшивающим инструментам, следует понимать, что эти идеи могут комбинироваться с идеями, представленными в одном или нескольких следующих документах, описание которых включено в настоящий документ путем ссылки: патент США № 7,380,696; патент США № 7,404,508; патент США № 7,455,208; патент США № 7,506,790 патент США № 7,549,564; патент США № 7,559,450; патент США № 7,654,431; патент США № 7,780,054; патент США № 7,784,662; и/или патент США № 7,798,386. Другие подходящие способы, с помощью которых идеи, представленные в настоящем документе, могут быть применены к хирургическим сшивающим инструментам, будут понятны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
Также следует понимать, что представленные в настоящем документе идеи можно легко применить к любому из инструментов, описанных в любом другом документе, процитированном в настоящем документе, так что существует множество способов комбинирования идей настоящей заявки с идеями любого документа, процитированного в настоящем документе. Другие типы инструментов, к которым можно отнести представленные в настоящем документе идеи, будут очевидны специалистам в данной области.
Следует учитывать, что любой патент, публикация или другой материал описания, полностью или частично включенный в настоящий документ путем ссылки, включены в него только в той степени, в которой включенный материал не противоречит существующим определениям, заявлениям или другим материалам описания, представленным в настоящем описании. Таким образом, описание, в прямой форме представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей материалу, включенному в настоящий документ путем ссылки. Любой материал, или его часть, указанный как включенный в настоящий документ путем ссылки, но противоречащий существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включен в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Описанные выше варианты можно выполнить с возможностью утилизации после однократного применения или их можно выполнить с возможностью многократного применения. Варианты либо в одном, либо в обоих случаях можно подготовить для повторного применения после, по меньшей мере, одного применения. Подготовка для повторного применения может включать любую комбинацию стадий разборки устройства, затем очистки или замены конкретных фрагментов и последующей повторной сборки. В частности, некоторые варианты устройства можно разобрать, и любое число конкретных фрагментов или частей устройства можно избирательно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей некоторые исполнения устройства можно повторно собрать для последующего применения либо в отделении, выполняющем подготовку к повторному применению, либо это может сделать сам пользователь непосредственно перед процедурой. Специалистам в данной области будет понятно, что подготовка устройства к повторному применению может включать различные методики разборки, чистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
Только в качестве примера, описанные в настоящем документе варианты можно стерилизовать до и/или после процедуры. В одной методике стерилизации устройство помещают в закрытый и герметичный контейнер, такой как пластиковый пакет или пакет из материала Тайвек (TYVEK). Затем контейнер и устройство можно поместить в поле излучения, которое может проникать в контейнер, такое как гамма-излучение, рентгеновское излучение или высокоэнергетический поток электронов. Излучение может убивать бактерии на устройстве и в контейнере. Затем стерилизованное устройство можно хранить в стерильном контейнере для дальнейшего применения. Устройство также можно стерилизовать с применением любой другой методики, известной в данной области, включая, без ограничений, бета- или гамма-излучение, этиленоксид или пар.
Обычный специалист в данной области может осуществить различные показанные и описанные варианты осуществления настоящего изобретения, дополнительные адаптации способов и систем, описанных в настоящем документе, путем соответствующих модификаций без отступления от объема настоящего изобретения. Некоторые из таких потенциальных модификаций были упомянуты, а другие будут очевидны обычным специалистам в данной области. Например, примеры, варианты осуществления, геометрические формы, материалы, размеры, коэффициенты, стадии и т.п., описанные выше, являются иллюстративными и не являются обязательными. Соответственно, объем настоящего изобретения следует рассматривать в свете представленной ниже формулы изобретения, и следует понимать, что он не ограничен подробной информацией о структуре и эксплуатации, показанной и описанной в описании и на рисунках.


Группа изобретений относится к медицинской технике, а именно к роботизированным ультразвуковым хирургическим инструментам с шарнирным концевым эффектором. Устройство для оперирования тканей содержит концевой эффектор, узел ствола и узел взаимодействия. Концевой эффектор содержит ультразвуковое лезвие и зажимной рычаг, выполненный с возможностью поворота относительно ультразвукового лезвия. Концевой эффектор расположен на дистальном конце узла ствола, при этом узел ствола формирует продольную ось. Узел ствола включает в себя шарнирную часть, выполненную с возможностью отклонения концевого эффектора от продольной оси. Узел взаимодействия выполнен с возможностью приведения в действие концевого эффектора, при этом узел взаимодействия содержит основание и множество приводных стержней. Основание выполнено с возможностью связи с панелью системы роботизированного управления. Множество приводных стержней размещены перпендикулярно к продольной оси. Первый приводной стержень из множества приводных стержней выполнен с возможностью вращения с обеспечением поворота зажимного рычага по направлению к ультразвуковому лезвию. Во втором варианте выполнения вышеуказанное устройство для оперирования тканей содержит концевой эффектор, узел ствола и узел взаимодействия. Узел взаимодействия содержит основание, множество приводных стержней и множество приводных дисков. Множество приводных стержней размещены перпендикулярно к продольной оси, при этом по меньшей мере один приводной стержень выполнен с возможностью приведения в действие шарнирной части, и причем первый приводной стержень из множества приводных стержней выполнен с возможностью вращения с обеспечением поворота зажимного рычага по направлению к ультразвуковому лезвию. Множество приводных дисков связано с множеством приводных стержней. Каждый приводной диск содержит соответствующую пару штифтов. Штифты выполнены с возможностью связи с соответствующими приводными элементами системы роботизированного управления. В третьем варианте выполнения вышеприведенное устройство для оперирования тканей содержит концевой эффектор, узел ствола, узел взаимодействия и систему роботизированного управления. Узел взаимодействия включает основание и множество приводных стержней. Множество приводных стержней выполнены с возможностью вращения относительно основания и размещены перпендикулярно к продольной оси. Первый приводной стержень из множества приводных стержней выполнен с возможностью вращения с обеспечением поворота зажимного рычага по направлению к ультразвуковому лезвию. Система роботизированного управления содержит роботизированный рычаг и узел взаимодействия пользователя. Роботизированный рычаг включает в себя панель. Основание выполнено с возможностью связи с панелью. Панель включает в себя приводные элементы, выполненные с возможностью связи с приводными стержнями. Узел взаимодействия пользователя выполнен с возможностью обеспечения дистанционного управления приводными элементами. Использование группы изобретений позволит обеспечить роботизированное управление хирургическим инструментом. 3 н. и 15 з.п. ф-лы, 18 ил.
1. Устройство для оперирования тканей, причем устройство содержит:
(a) концевой эффектор, содержащий ультразвуковое лезвие и зажимной рычаг, выполненный с возможностью поворота относительно ультразвукового лезвия;
(b) узел ствола, при этом концевой эффектор расположен на дистальном конце узла ствола, при этом узел ствола формирует продольную ось, при этом узел ствола включает в себя шарнирную часть, выполненную с возможностью отклонения концевого эффектора от продольной оси; и
(c) узел взаимодействия, выполненный с возможностью приведения в действие концевого эффектора, при этом узел взаимодействия содержит:
(i) основание, выполненное с возможностью связи с панелью системы роботизированного управления, и
(ii) множество приводных стержней, размещенных перпендикулярно к продольной оси, причем первый приводной стержень из множества приводных стержней выполнен с возможностью вращения с обеспечением поворота зажимного рычага по направлению к ультразвуковому лезвию.
2. Устройство по п. 1, в котором узел ствола выполнен с возможностью вращения относительно узла взаимодействия.
3. Устройство по п. 2, в котором первый приводной стержень из множества приводных стержней выполнен с возможностью вращения с обеспечением вращения узла ствола относительно узла взаимодействия.
4. Устройство по п. 3, в котором узел ствола и первый приводной стержень включают в себя введенные в зацепление косозубые шестерни.
5. Устройство по п. 1, в котором узел ствола содержит перемещающийся элемент, соединенный между первым приводным стержнем и зажимным рычагом.
6. Устройство по п. 5, в котором узел взаимодействия дополнительно содержит:
(i) эксцентриковый кулачок, закрепленный к первому приводному стержню, и
(ii) рейку, соединенную с перемещающимся элементом, при этом эксцентриковый кулачок выполнен с возможностью проксимального перемещения рейки в ответ на вращение первого приводного стержня с обеспечением поворота зажимного рычага по направлению к ультразвуковому лезвию.
7. Устройство по п. 1, в котором шарнирная часть содержит первый шарнирный стержень, причем первый шарнирный стержень выполнен с возможностью перемещения относительно узла ствола с обеспечением отклонения концевого эффектора от продольной оси.
8. Устройство по п. 7, в котором шарнирная часть дополнительно содержит второй шарнирный стержень, при этом первый шарнирный стержень выполнен с возможностью перемещения относительно узла ствола с обеспечением отклонения концевого эффектора от продольной оси в первом направлении, причем второй шарнирный стержень выполнен с возможностью перемещения относительно узла ствола с обеспечением отклонения концевого эффектора от продольной оси во втором направлении.
9. Устройство по п. 7, в котором первый приводной стержень из множества приводных стержней выполнен с возможностью вращения с обеспечением перемещения первого шарнирного стержня.
10. Устройство по п. 9, в котором узел взаимодействия дополнительно содержит:
(i) эксцентриковый кулачок, закрепленный к первому приводному стержню, и
(ii) поворотный рычаг, соединенный с первым шарнирным стержнем, при этом эксцентриковый кулачок выполнен с возможностью проксимального перемещения поворотного рычага в ответ на вращение первого приводного стержня для отклонения концевого эффектора от продольной оси.
11. Устройство по п. 7, в котором шарнирная часть содержит пару ребристых кожухов, при этом первый шарнирный стержень расположен между парой ребристых кожухов.
12. Устройство по п. 1, в котором узел ствола содержит:
(i) жесткий акустический волновод, и
(ii) гибкий акустический волновод, проходящий через шарнирную часть,
при этом жесткий акустический волновод и гибкий акустический волновод соединены между собой, при этом жесткий акустический волновод и гибкий акустический волновод выполнены с возможностью передачи ультразвуковых колебаний к ультразвуковому лезвию.
13. Устройство по п. 12, в котором гибкий акустический волновод включает в себя суженную часть, выполненную с возможностью обеспечения изгибания гибкого акустического волновода.
14. Устройство по п. 13, в котором гибкий акустический волновод дополнительно содержит дистальный фланец и проксимальный фланец, при этом суженная часть расположена в продольном направлении между дистальным фланцем и проксимальным фланцем.
15. Устройство по п. 1, в котором основание содержит множество приводных дисков, выполненных с возможностью вращения приводных стержней.
16. Устройство по п. 15, в котором каждый приводной диск содержит соответствующую пару штифтов, выполненных с возможностью соединения с соответствующими приводными элементами системы роботизированного управления.
17. Устройство для оперирования тканей, причем устройство содержит:
(a) концевой эффектор, содержащий ультразвуковое лезвие и зажимной рычаг, выполненный с возможностью поворота относительно ультразвукового лезвия;
(b) узел ствола, при этом концевой эффектор расположен на дистальном конце узла ствола, при этом узел ствола формирует продольную ось, при этом узел ствола включает в себя шарнирную часть, выполненную с возможностью отклонения концевого эффектора от продольной оси; и
(c) узел взаимодействия, который выполнен с возможностью приведения в действие концевого эффектора, при этом узел взаимодействия содержит:
(i) основание, выполненное с возможностью связи с панелью системы роботизированного управления,
(ii) множество приводных стержней, размещенных перпендикулярно к продольной оси, при этом по меньшей мере один приводной стержень выполнен с возможностью приведения в действие шарнирной части, и причем первый приводной стержень из множества приводных стержней выполнен с возможностью вращения с обеспечением поворота зажимного рычага по направлению к ультразвуковому лезвию, и
(iii) множество приводных дисков, связанных с множеством приводных стержней, при этом каждый приводной диск содержит соответствующую пару штифтов, при этом штифты выполнены с возможностью связи с соответствующими приводными элементами системы роботизированного управления.
18. Устройство для оперирования тканей, причем устройство содержит:
(a) концевой эффектор, содержащий ультразвуковое лезвие и зажимной рычаг, выполненный с возможностью поворота относительно ультразвукового лезвия;
(b) узел ствола, при этом концевой эффектор расположен на дистальном конце узла ствола, при этом узел ствола формирует продольную ось, при этом узел ствола включает в себя шарнирную часть, выполненную с возможностью отклонения концевого эффектора от продольной оси;
(c) узел взаимодействия, выполненный с возможностью приведения в действие концевого эффектора, при этом узел взаимодействия содержит:
(i) основание, и
(ii) множество приводных стержней, выполненных с возможностью вращения относительно основания и размещенных перпендикулярно к продольной оси, и причем первый приводной стержень из множества приводных стержней выполнен с возможностью вращения с обеспечением поворота зажимного рычага по направлению к ультразвуковому лезвию; и
(d) систему роботизированного управления, содержащую:
(i) роботизированный рычаг, включающий в себя панель, при этом основание выполнено с возможностью связи с панелью, при этом панель включает в себя приводные элементы, выполненные с возможностью связи с приводными стержнями, и
(ii) узел взаимодействия пользователя, причем узел взаимодействия пользователя выполнен с возможностью обеспечения дистанционного управления приводными элементами.
| US 2011295242 A1, 01.12.2011 | |||
| Трансформатор | 1938 |
|
SU61122A1 |
| US 2002177843 A1, 28.11.2002 | |||
| US 2007173871 A1, 26.07.2007. | |||

