Изобретение относится к космической технике, в частности, к инструментам и устройствам, применяемым космонавтом в скафандре под избыточным давлением в процессе внекорабельной деятельности в условиях невесомости.
Применение космонавтами инструментов при выполнении технологических операций по сборке, монтажу и ремонту в условиях полета стало инженерной реальностью при эксплуатации космических объектов. Применяются инструменты различного предназначения, преимущественно ручные, адаптированные к условиям эксплуатации. Наиболее распространенной технологической операцией является завертывание/отвертывание крепежных деталей резьбовых соединений, а также образование отверстий. Увеличение объема технологических работ вызывает необходимость повысить производительность труда космонавта-монтажника, снизить трудоемкость работ и нагрузку на космонавта путем применения ручной машины.
Ручной называется машина, снабженная двигателем, вес которой при работе полностью или частично воспринимается руками оператора; главное рабочее движение (движение рабочего органа) в этой машине осуществляется с помощью соответствующего двигателя, а вспомогательное движение (подача) и управление выполняются непосредственным воздействием на машину вручную (Большая советская энциклопедия. Т. 22, с. 436. Издательство "Советская энциклопедия". М. 1975).
Ручная машина (РМ), как система, состоит из двух четко отграниченных подсистем:
- электродвигатель и механизм передачи вращающего момента от вала электродвигателя на шпиндель или другой рабочий орган машины;
- корпус машины, рукоятка, орган управления.
Известна РМ (Цыганков О.С. Пятидесятилетие внекорабельной деятельности // Космическая техника и технологии. - 2015. - №1. - С. 9). В данной конструкции двигательно-передаточная подсистема выполнена с удовлетворением требования минимизации реактивного воздействия на руку космонавта в наддутой перчатке, что является обязательным для РМ космического применения.
Компоновочное решение подсистемы, включающей корпус, рукоятку и орган управления, выполненное по традиционной схеме РМ для стандартных условий на Земле, без учета требований эксплуатации в космическом полете, не обеспечивает компенсацию ограничений, которые накладывают скафандр и средства фиксации в невесомости на функциональные возможности космонавта, не ведет к высокой производительности и снижению трудоемкости, не исключает повреждения наддутых перчаток скафандра, орган управления не эргономичен, так как предусматривает использование только одного пальца руки.
Задачей изобретения является обеспечение эргономичности, технологической эффективности, высокой производительности, минимальной трудоемкости, надежности и безопасности РМ для применения космонавтом в скафандре под избыточным давлением в процессе внекорабельной деятельности в условиях невесомости.
Техническим результатом изобретения является повышение эргономичности, технологической эффективности, производительности, минимизация трудоемкости, повышение надежности и безопасности ручной машины для применения космонавтом в скафандре под избыточным давлением в процессе внекорабельной деятельности в условиях невесомости путем согласования конструкции РМ с функциональными возможностями космонавта, конструктивно-эксплуатационными характеристиками скафандра и рабочей позой космонавта, определяемой в невесомости средствами фиксации.
Технический результат изобретения достигается тем, что РМ для применения космонавтом в скафандре под избыточным давлением в процессе внекорабельной деятельности в условиях невесомости содержит двигательно-передаточную подсистему, корпус, на котором закреплены посредством шарниров, по крайней мере, две рукоятки с органами управления в виде гашеток нажимного действия, упомянутые рукоятки, согласованы с наддутыми перчатками скафандра космонавта и расположены в III и IV четвертях, в одной вертикальной плоскости (V), перпендикулярной продольной оси корпуса (X) и симметрично относительно оси (-Y), лежащей в вертикальной плоскости (V), под углами 60°±15 с возможностью их регулировки и фиксации.
Кроме того, шарниры могут быть выполнены сферическими или цилиндрическими.
Из определения РМ следует, что усилие подачи, например, при сверлении, должен прикладывать оператор вдоль связки "ось двигателя - шпиндель - рабочий орган". Из практики известно, что в обычных условиях на Земле, при работе дрелью или шуруповертом, оператор занимает характерную позу стоя "вполоборота" к обрабатываемой поверхности, например, к стене.
Оценим реализуемость указанных действий космонавтом в наддутом скафандре при внекорабельной деятельности в невесомости. Для приложения усилия подачи космонавт должен быть зафиксирован на относительно неподвижной опоре, например, в устройстве для закрепления ног (Цыганков О.С. Пятидесятилетие внекорабельной деятельности // Космическая техника и технологии. - 2015. - №1. - С. 10). Занять космонавту положение "вполоборота", будучи зафиксированным, не представляется возможным ввиду отсутствия в скафандре подвижности в районе поясного шпангоута и наличия определенного закроя рукавов скафандра.
Таким образом, при ограниченной координации движений рук-аэробалок и сниженной тактильной чувствительности пальцев в наддутых перчатках, возможность направить рабочий орган, например, сверло, перпендикулярно на обрабатываемую поверхность и приложить необходимое усилие, в данных условиях может быть обеспечена космонавту только изменением компоновочного решения корпуса РМ, рациональным расположением рукоятки.
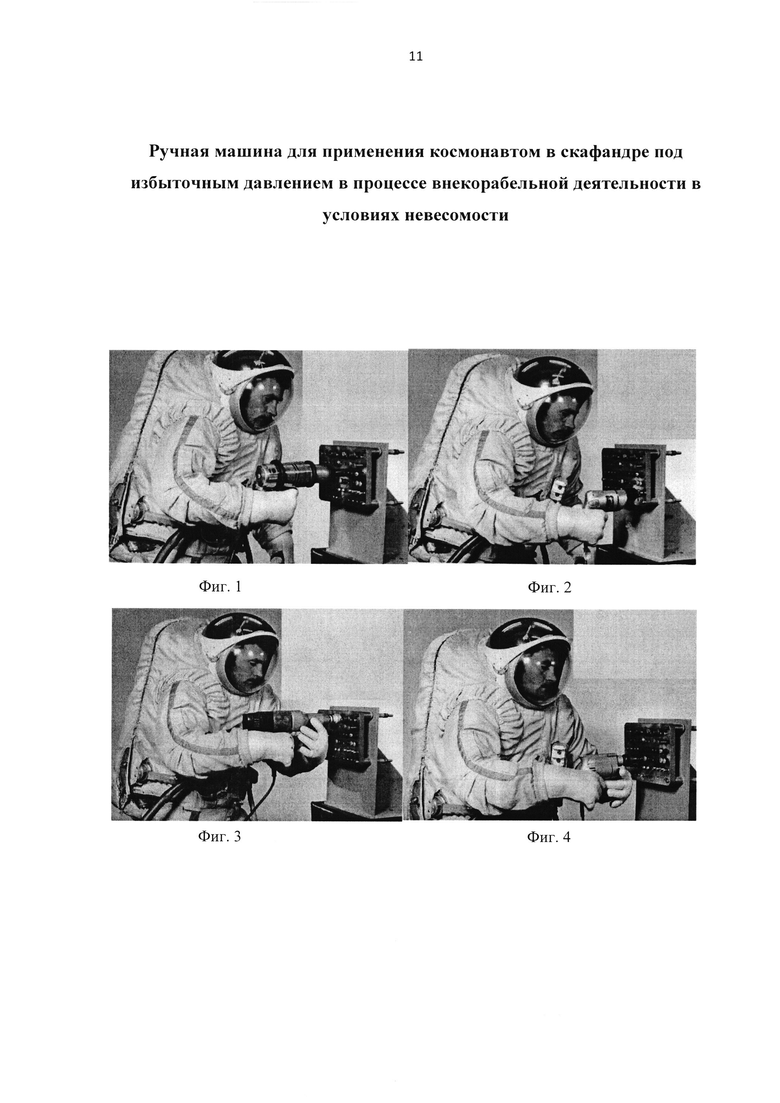
Для поиска рационального компоновочного облика РМ космического предназначения проведена экспериментальная технико-эксплуатационная оценка известных РМ на совместимость с функциональными возможностями космонавта-испытателя, облаченного в скафандр под избыточным давлением 0,4 ати. Ниже приводятся виды компоновок и результаты оценки (фиг. 1-10).
Фиг. 1. РМ пистолетного типа, рукоятка расположена под центром масс (ЦМ). Слишком большое расстояние (плечо) между осью шпинделя и точкой приложения усилия испытателя на рукоятке по направлению движения рабочего инструмента, сопряжено с поломками сверла.
Фиг. 2. РМ с рукояткой пистолетного типа, выполненной заодно с корпусом. ЦМ находится впереди рукоятки. Отклонение направления усилия от оси инструмента ведет к поломке инструмента, особенно при образовании отверстий, глубина которых больше диаметра сверла.
Фиг. 3. РМ пистолетного типа с рукояткой в зоне ЦМ. Левая рука используется для поддержки и более надежного соблюдения соосности направления движения инструмента и приложения усилия подачи. Отсутствует захватный элемент для левой руки. Перчатка левой руки находится в опасной близости от инструмента. Отмечаются поломки инструмента.
Фиг. 4. РМ с рукояткой пистолетного типа, выполненной заодно с корпусом. Левая рука используется для поддержки и более надежного соблюдения соосности направления движения инструмента и приложения усилия подачи. Отсутствует захватный элемент для левой руки. Перчатка левой руки в опасной близости от инструмента. Отмечаются поломки инструмента.
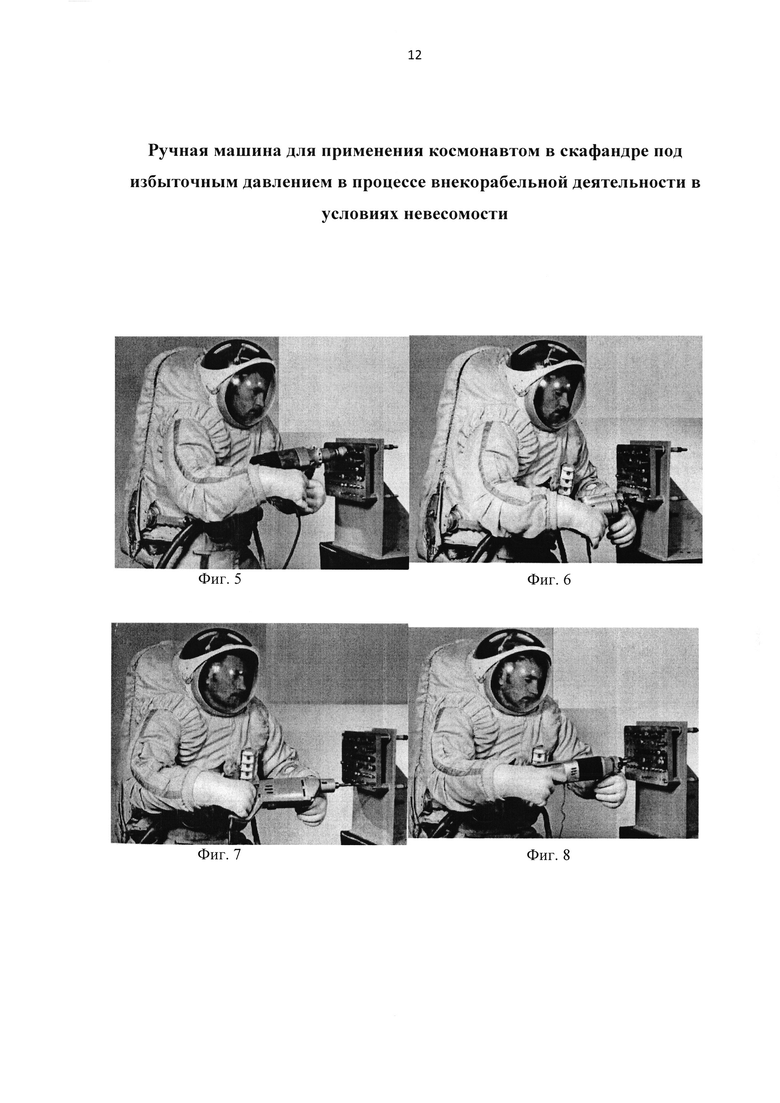
Фиг. 5. РМ пистолетного типа. Введена вторая рукоятка. Удерживать РМ и направление оси инструмента значительно удобнее. Расположение рукояток рядом затрудняет полноценный захват в наддутых перчатках двух рукояток одновременно.
Фиг. 6. РМ с рукояткой пистолетного типа, выполненной заодно с корпусом. Введена вторая рукоятка. Удерживать РМ более удобно. Левая перчатка в опасной близости от инструмента.
Фиг. 7. РМ со скобообразной рукояткой, расположенной по оси корпуса с тыльной его стороны. Введена вторая рукоятка. Удерживать РМ удобно. Отмечается отклонение инструмента от технологического направления из-за большого расстояния между рукоятками, вследствие этого разные положения рук и прилагаемых усилий.
Фиг. 8. РМ с пистолетной рукояткой на тыльной стороне корпуса. Введена вторая рукоятка. Удерживать РМ удобно. Большое расстояние между рукоятками обусловливает различное положение рук и величину прилагаемый усилий, что вызывает отклонение оси инструмента от технологического направления.
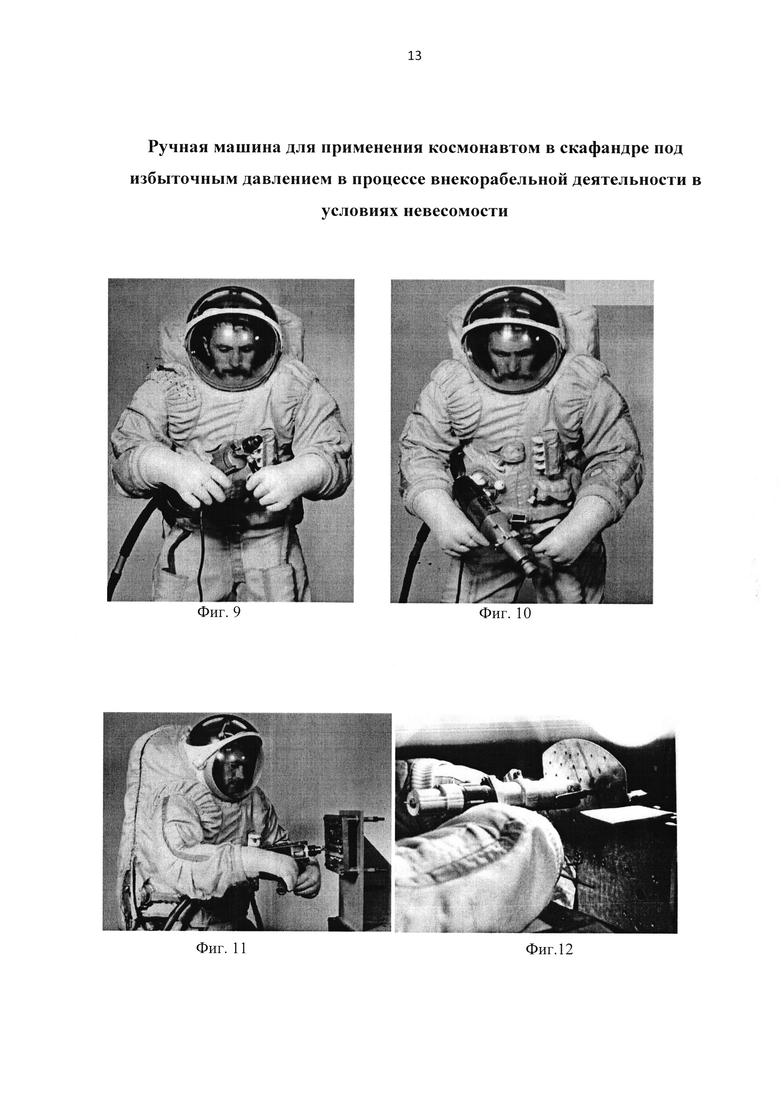
На фиг. 9, 10 отчетливо видно, что при двух разнесенных по длине корпуса рукоятках и одинаковых положении каждой из рук испытателя, инструмент не может быть ориентирован перпендикулярно обрабатываемой поверхности, параллельной фронтальной плоскости испытателя.
На фиг. 11, 12 показаны макетные образцы РМ с двумя рукоятками, расположенными по длине корпуса в одной плоскости, перпендикулярной продольной оси корпуса, что обеспечивает перпендикулярность инструмента к обрабатываемой поверхности и сохранение его целостности, особенно при сверлении.
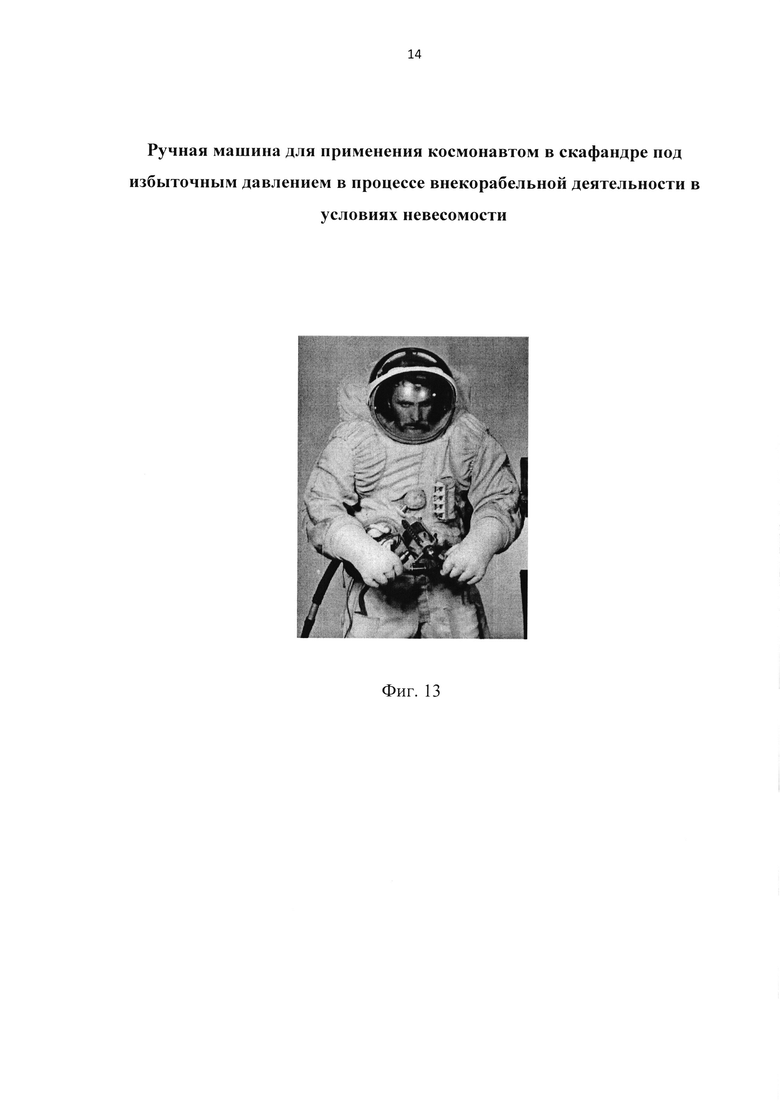
На фиг. 13 представлена конфигурация макета РМ в качестве результата экспериментальной технико-эксплуатационной оптимизации корпуса, в котором две рукоятки расположены симметрично по длине корпуса под оптимальными углами к продольной оси корпуса с возможностью их регулировки и фиксации в диапазоне пространственного угла 180°.
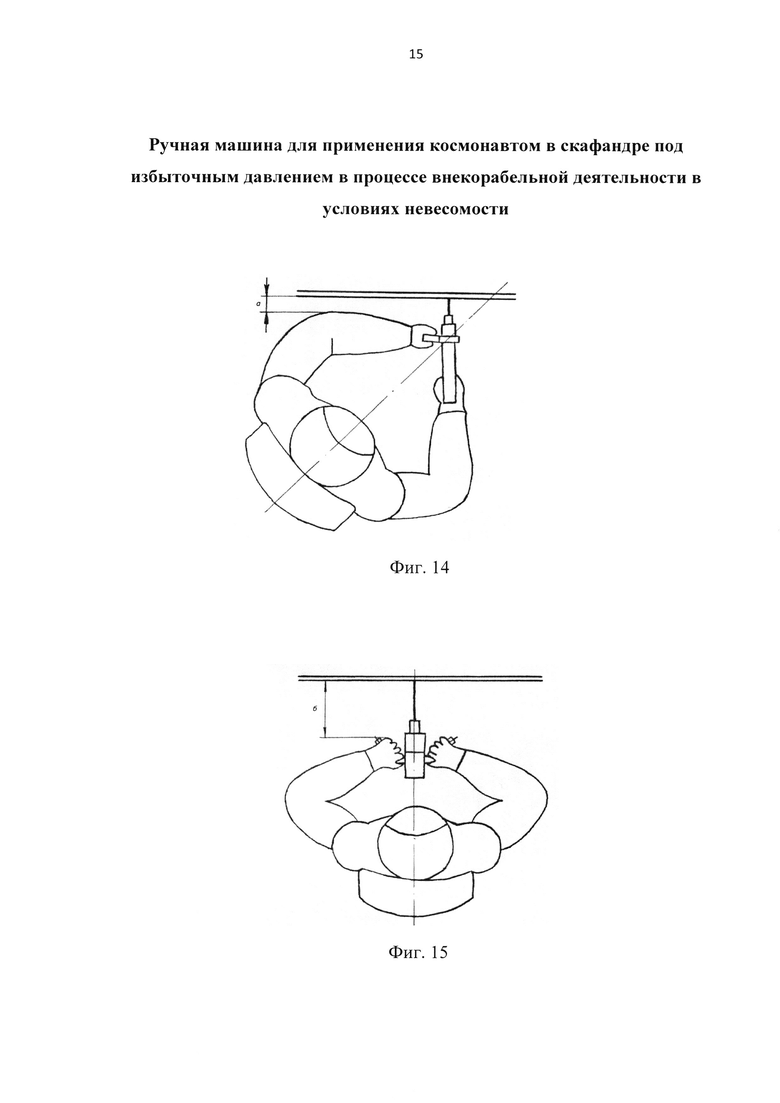
Для обоснованного и уверенного выбора конструкции РМ космического предназначения, проведен сравнительный анализ действий по применению РМ традиционной компоновки (фиг. 14) и РМ компоновки, полученной в результате экспериментальной технико-эксплуатационной оценки известных типов РМ (фиг. 15).
В позе испытателя, показанной на фиг. 14, предплечье левой руки находится в небезопасной близости от обрабатываемой поверхности (зазор "а"→0). В данном положении усилия, развиваемого правой рукой, может быть недостаточно для выполнения технологической операции или потребуется излишнее перенапряжение испытателя. Затруднено наблюдение за техпроцессом.
На фиг. 15 фронтальная плоскость испытателя параллельна обрабатываемой поверхности, что позволяет испытателю направить инструмент перпендикулярно этой поверхности. Зазор "б"=150±25 мм достаточен для рабочего хода инструмента. Наличие двух рукояток позволяет удобно удерживать РМ. Наклон рукояток позволяет придать рукам комфортное положение, согласованное с закроем рукавов скафандра под наддувом и прикладывать необходимые усилия.
Таким образом, конструкция РМ, представленная на фиг.15, принимается как наиболее рациональная.
На фигурах показано:
На фиг. 1, 2, 3, 4 - разновидности традиционных компоновок корпусов РМ с одной рукояткой, обычная поза испытателя.
На фиг. 5, 6 7, 8 - РМ с двумя рукоятками, обычная поза испытателя.
На фиг. 9, 10 - РМ с двумя разнорасположенными по длине рукоятками, рациональная поза испытателя.
На фиг. 11, 12 - РМ с двумя симметрично расположенными рукоятками, рациональная поза испытателя.
На фиг. 13 - представлена конфигурация РМ в качестве результата экспериментальной технико-эксплуатационной оптимизации корпуса.
На фиг. 14 - положение испытателя при применении РМ традиционной компоновки корпуса.
На фиг. 15 - положение испытателя при применении РМ оптимизированной компоновки корпуса.
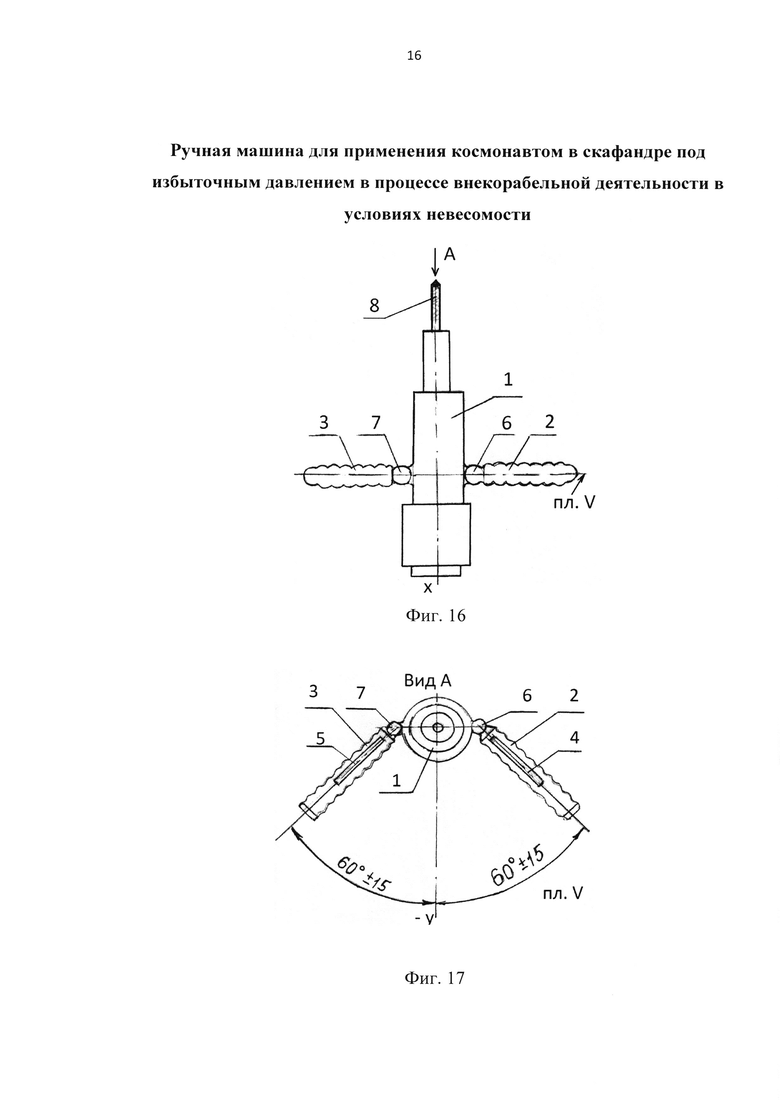
На фиг. 16 - конструктивная схема РМ для применения космонавтом в скафандре.
На фиг. 17 - конструктивная схема РМ для применения космонавтом в скафандре, вид А.
На фигурах 16-17 приняты следующие обозначения: 1 - корпус; 2, 3 - рукоятки; 4, 5 - гашетки;
6, 7 - цилиндрические или сферические шарниры;
8 - рабочий инструмент.
Ручная машина (фиг. 16 и 17) содержит двигательно-передаточную подсистему (на фигурах не показана), корпус 1, рукоятки 2 и 3 с гашетками 4 и 5, находящиеся в III и IV в четвертях. Рукоятки 2 и 3 согласованы с наддутыми перчатками скафандра космонавта и закреплены на корпусе 1 посредством цилиндрических или сферических шарниров 6 и 7 с возможностью их регулирования и фиксации в диапазоне выбранного угла 60°±15 в одной вертикальной плоскости V, перпендикулярной продольной оси (X) корпуса 1 и расположены симметрично относительно оси (-Y), лежащей в вертикальной плоскости V.
Применение РМ осуществляется следующим образом.
Космонавт-оператор занимает рабочее место и фиксирует ботинки скафандра в устройстве фиксации (Цыганков О.С. Пятидесятилетие внекорабельной деятельности // Космическая техника и технологии. - 2015. - №1. - С. 9-10). Другой член экипажа, удерживая РМ за одну рукоятку 2, подает РМ космонавту-оператору, который ее принимает захватом за вторую рукоятку 3. Затем космонавт-оператор захватывает рукоятку 2, удерживая РМ за обе рукоятки 2 и 3, направляет рабочий инструмент 8 на предмет труда и, нажимая гашетки 4 и 5 одновременно на рукоятках 2 и 3, прилагает усилие для осуществления рабочего хода. Обратное вращение двигателя достигается нажатием на одну любую гашетку 4 или 5.
Предложенное изобретение при выполнении технологических операций космонавтом в скафандре под избыточным давлением в процессе внекорабельной деятельности в условиях невесомости обеспечивает:
- компенсацию отсутствия подвижности скафандра в поясной области (расширение возможностей);
- удобство удерживания РМ и исключает повреждения перчаток скафандра (безопасность);
- соблюдение необходимого технологического направления рабочего инструмента (техническая эффективность);
- комфортную позу при приложении усилий, снижение энерготрат космонавта-оператора (снижение трудоемкости);
- обзор зон технологических действий при групповых операциях (производительность).
Изобретение относится к космической технике, в частности к инструментам и устройствам, применяемым космонавтом в скафандре под избыточным давлением в процессе внекорабельной деятельности в условиях невесомости. Ручная машина для завертывания и отвертывания крепежных деталей и образования отверстий, предназначенная для внекорабельной деятельности космонавта в скафандре в условиях невесомости, содержит двигательно-передаточную подсистему для обеспечения вращения рабочего органа и корпус, рукоятку с органом управления. На корпусе посредством шарниров закреплены по крайней мере две рукоятки, каждая из которых согласована с наддутыми перчатками скафандра космонавта. Одна из рукояток закреплена в III четверти корпуса, другая - в IV четверти корпуса и в одной и той же вертикальной плоскости (V), перпендикулярной продольной оси корпуса (X), и симметрично относительно оси (-Y), лежащей в вертикальной плоскости (V). Каждая из рукояток выполнена с органами управления в виде гашеток нажимного действия для фиксации и регулировки под углом 60±15° к оси (-Y). Технический результат заключается в повышении производительности труда космонавта-монтажника, снижении трудоемкости работ и нагрузки на космонавта, повышении технологической эффективности, производительности, минимизации трудоемкости, повышении надежности и безопасности при работе ручной машины. 2 з.п. ф-лы, 17 ил.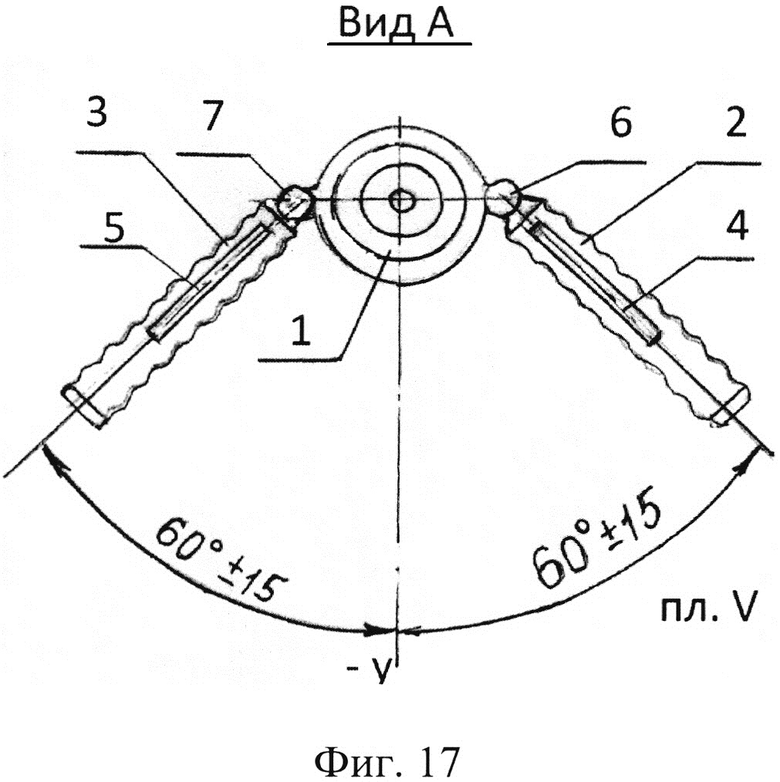
1. Ручная машина для завертывания и отвертывания крепежных деталей и образования отверстий, предназначенная для внекорабельной деятельности космонавта в скафандре в условиях невесомости, содержащая двигательно-передаточную подсистему для обеспечения вращения рабочего органа, корпус и рукоятку с органом управления, отличающаяся тем, что на корпусе посредством шарниров закреплены по крайней мере две рукоятки, каждая из которых согласована с наддутыми перчатками скафандра космонавта, при этом одна из рукояток закреплена в III четверти корпуса, другая - в IV четверти корпуса и в одной и той же вертикальной плоскости (V), перпендикулярной продольной оси корпуса (X), и симметрично относительно оси (-Y), лежащей в вертикальной плоскости (V), при этом каждая из рукояток выполнена с органами управления в виде гашеток нажимного действия для фиксации и регулировки под углом 60±15° к оси (-Y).
2. Ручная машина по п. 1, отличающаяся тем, что шарниры выполнены сферическими.
3. Ручная машина по п. 1, отличающаяся тем, что шарниры выполнены цилиндрическими.
| Цыганков О.С., Пятидесятилетие внекорабельной деятельности, ПАО "РКК "Энергия" имени С.П.Королёва", Космическая техника и технологии | |||
| ИНСТРУМЕНТ С ОГРАНИЧЕНИЕМ КРУТЯЩЕГО МОМЕНТА | 2002 |
|
RU2223897C1 |
| WO 1997023326 A1, 03.07.1997 | |||
| US 7207245 B1, 24.04.2007. | |||

