Изобретение относится к охранной сигнализации и может использоваться, в частности, для обнаружения нарушителя по факту преодоления им зоны обнаружения, создаваемой устройством. Для контроля протяженных рубежей охраны могут применяться двухпозиционные активные устройства с передатчиками и приемниками направленного излучения. К таким устройствам могут быть отнесены двухпозиционные радиолучевые и радиоволновые устройства для тревожной сигнализации.
Общеизвестны радиолучевые и радиоволновые устройства и системы для тревожной сигнализации, которые могут быть использованы для контроля рубежей охраны на открытой местности (патенты RU №№2079889, 2103743, 2109343, 2155382, 2292600, 2306612, 2455692, 2311658, 2348980, 2595979, 38412 и др.).
При размещении двухпозиционных радиолучевых и радиоволновых устройств на местности перед переводом их в режим охраны необходимо выполнять взаимную юстировку приемных и передающих блоков. Обычно юстировка выполняется вручную двумя-тремя людьми и требует определенных навыков и трудозатрат.
Поэтому, к недостаткам датчиков, устройств и систем следует отнести отсутствие возможности юстировки передающих и приемных блоков в автоматическом режиме (без участия человека). Применение автоматического режима юстировки позволит значительно сократить время ввода в эксплуатацию устройств при оборудовании, например, протяженных рубежей охраны.
Наиболее близким по технической сущности к заявленному изобретению является устройство «Радиолокационный модуль и извещатели охраны на его основе», описанное в патенте RU №2406154, МПК G08B 13/18, G01S 13/00, опубл. в 2010 г., которое выбрано в качестве прототипа. Это устройство содержит (см. п. 6 формулы изобретения) размещенные на противоположных сторонах охраняемого рубежа передатчик и приемник направленного радиоизлучения. Передатчик содержит первую (передающую) СВЧ-антенну с подключенным к ее первому СВЧ-входу передающим радиомодемом, содержащим генератор СВЧ и усилитель мощности. Приемник содержит вторую (приемную) СВЧ-антенну с подключенным к ее первому СВЧ-входу приемным радиомодемом, который содержит последовательно соединенные амплитудный детектор СВЧ, усилитель низкой частоты и фильтр. Выход приемного радиомодема является выходом сигнала тревоги. Передающий радиомодем реализует функции модуляции, генерации и усиления мощности зондирующего сигнала. Приемный радиомодем реализует функции приема (амплитудного детектирования), усиления, фильтрации и пороговой обработки отличительных признаков полезного сигнала с формированием сигнала тревоги на своем выходе. При движении нарушителя через охраняемый рубеж приемный радиомодем осуществляет пороговую обработку отличительных признаков полезного сигнала и в устройстве принимается решение о пересечении нарушителем охраняемого рубежа с формированием сигнала тревоги.
Общими существенными признаками с заявляемым решением являются: размещенные на противоположенных сторонах рубежа охраны передатчик и приемник направленного излучения, формирующие вдоль рубежа охраны зону обнаружения; упомянутый передатчик на передающей стороне рубежа охраны, содержащий генератор импульсов, усилитель мощности, выход которого подключен к первому входу первой (передающей) СВЧ-антенны (передающего блока), формирующей первую диаграмму направленности; упомянутый приемник на приемной стороне рубежа охраны, содержащий вторую (приемную) СВЧ-антенну (приемный блок), формирующую вторую диаграмму направленности, первый вход второй (приемной) СВЧ-антенны (приемного блока) через последовательно соединенные амплитудный детектор и усилитель низкой частоты подключены ко входу фильтра.
Недостатком устройства является отсутствие возможности юстировки передающих и приемных блоков в автоматическом режиме (без участия человека).
Целью настоящего изобретения является обеспечение возможности юстировки передающих и приемных блоков по азимуту и углу места в автоматическом режиме (без участия человека).
Для достижения этой цели в известное техническое решение введены новые существенные признаки, функциональные элементы и связи, которые позволяют обеспечить юстировку передающих и приемных блоков по азимуту и углу места в автоматическом режиме с помощью сервоприводов.
Эта цель достигнута в предложенном устройстве для тревожной сигнализации с сервоприводами передающего и приемного блоков, содержащим размещенные на противоположенных сторонах рубежа охраны передатчик и приемник направленного излучения, формирующие вдоль рубежа охраны зону обнаружения; упомянутый передатчик на передающей стороне рубежа охраны содержит последовательно соединенные генератор импульсов и усилитель мощности, выход которого подключен ко входу передающего блока, формирующего первую диаграмму направленности; упомянутый приемник на приемной стороне рубежа охраны содержит приемный блок, формирующий вторую диаграмму направленности, выход приемного блока через амплитудный детектор подключен к первому входу усилителя низкой частоты, выход которого подключен ко входу фильтра, в передатчик на передающей стороне рубежа охраны введены первый и второй сервоприводы, каждый из которых механически связан с передающим блоком, а также первый коммутатор, первый вход/выход которого подключен ко входу/выходу первого сервопривода, а его второй вход/выход подключен ко входу/выходу второго сервопривода; в приемник на приемной стороне рубежа охраны введены третий и четвертый сервоприводы, каждый из которых механически связан с приемным блоком, второй коммутатор и сигнальный процессор, первый вход/выход второго коммутатора подключен ко входу/выходу третьего сервопривода, а его второй вход/выход подключен ко входу/выходу четвертого сервопривода, выход фильтра подключен ко входу сигнального процессора, первый выход сигнального процессора подключен ко второму входу усилителя низкой частоты, первый вход/выход сигнального процессора подключен посредством первой линии интерфейса к третьему входу/выходу первого коммутатора, второй вход/выход сигнального процессора подключен посредством второй линии интерфейса к третьему входу/выходу второго коммутатора, второй выход сигнального процессора является выходом сигналов тревоги и неисправности. Первый и второй сервоприводы передающего блока выполнены с возможностью юстировки его в пространстве, соответственно, по азимуту и по углу места. Третий и четвертый сервоприводы приемного блока выполнены с возможностью юстировки его в пространстве, соответственно, по азимуту и по углу места. Сигнальный процессор выполнен с возможностями управления первым и вторым сервоприводами передающего блока, управления третьим и четвертым сервоприводами приемного блока, пороговой обработки полезного сигнала и принятия решения о пересечении нарушителем рубежа охраны с формированием сигнала тревоги или формирования сигнала неисправности.
Сущность изобретения поясняется фиг. 1, 2, на которых изображено следующее.
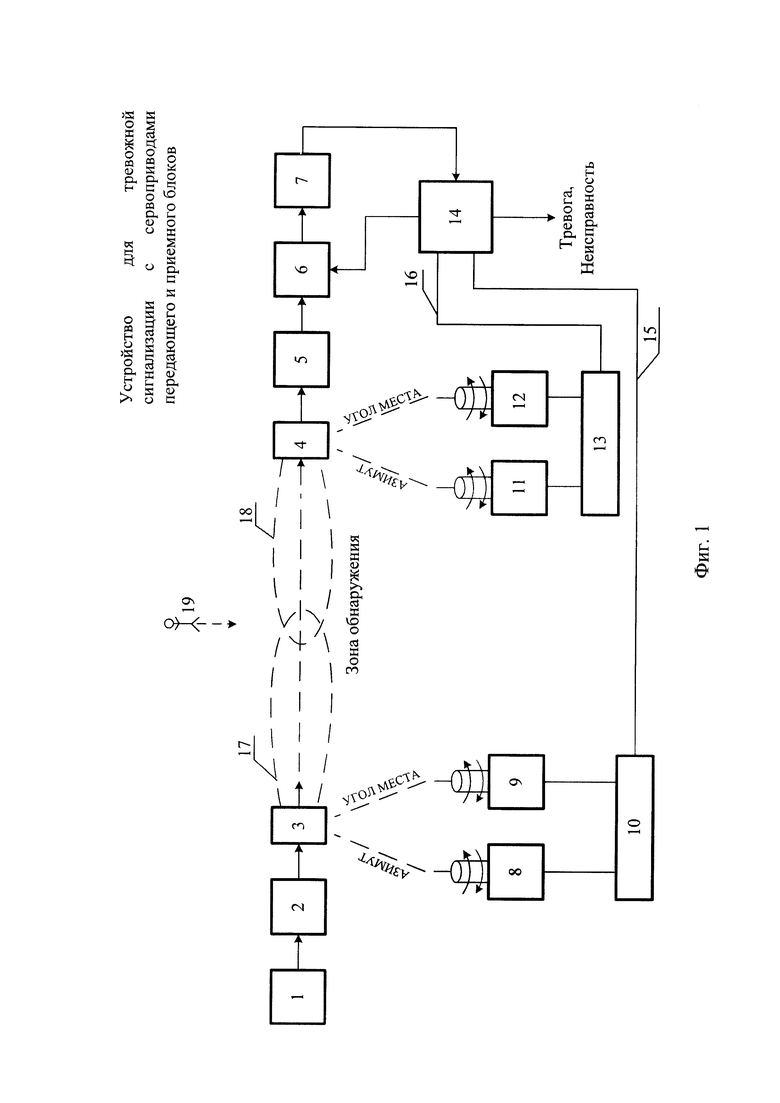
На фиг. 1 приведена структурная схема предложенного устройства, где введены обозначения: генератор импульсов - 1, усилитель мощности - 2, передающий блок - 3, приемный блок - 4, амплитудный детектор - 5, усилитель низкой частоты - 6, фильтр - 7, первый сервопривод - 8, второй сервопривод - 9, первый коммутатор - 10, третий сервопривод - 11, четвертый сервопривод - 12, второй коммутатор - 13, сигнальный процессор - 14, первая линия интерфейса - 15, вторая линия интерфейса - 16. На фиг. 1 также изображены: первая диаграмма направленности - 17 передающего блока, вторая диаграмма направленности - 18 приемного блока, человек - нарушитель (цель) - 19, пересекающий рубеж охраны в направлении, указанном штрихпунктирной стрелкой. Стрелками, выполненными сплошными линиями в зоне обнаружения, показано направление излучения зондирующего сигнала вдоль рубежа охраны.
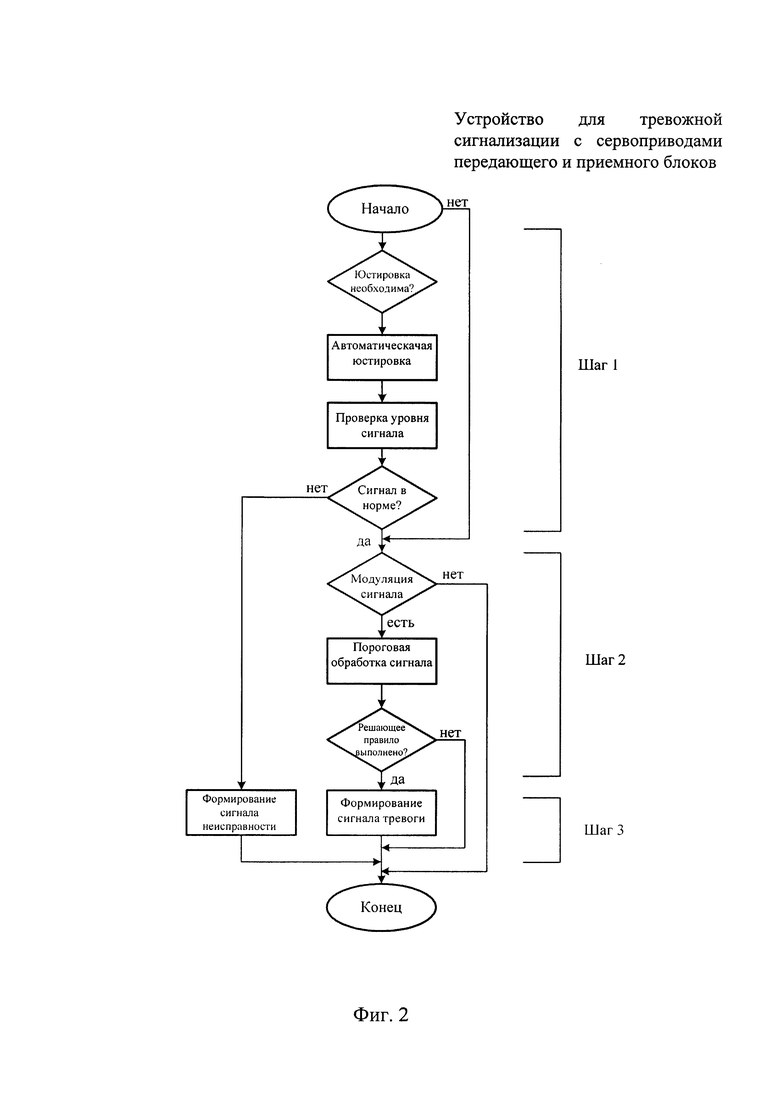
На фиг. 2 приведен пример общего алгоритма работы сигнального процессора 14.
Предложенное устройство (фиг. 1) работает следующим образом.
Данное устройство с сервоприводами передающего и приемного блоков является двухпозиционным и содержит размещенные на противоположенных сторонах рубежа охраны передатчик и приемник направленного излучения, формирующие вдоль рубежа охраны зону обнаружения. Передатчик состоит из генератора импульсов 1, усилителя мощности 2, передающего блока 3, первого 8 и второго 9 сервоприводов и первого коммутатора 10. Приемник состоит из приемного блока 4, амплитудного детектора 5, усилителя низкой частоты 6, фильтра 7, третьего 11 и четвертого 12 сервоприводов, второго коммутатора 13 и сигнального процессора 14. Каждый из блоков 3 и 4 формирует диаграммы направленности, ориентированные в пространстве вдоль рубежа охраны навстречу друг другу. В передатчике генератор импульсов 1 генерирует зондирующий сигнал, который подключается к усилителю мощности 2. Усилитель мощности усиливают зондирующий сигнал перед поступлением его на вход передающего блока 3, который на передающей стороне излучает в направлении первой диаграммы направленности 17 этот зондирующий сигнал. На приемной стороне приемным блоком 4 по направлению второй диаграммы направленности 18 принимается этот зондирующий сигнал, который поступает на амплитудный детектор 5, где преобразуется в низкочастотный (НЧ) сигнал. Далее этот НЧ-сигнал проходит через усилитель низкой частоты 6, фильтр 7 и поступает на вход сигнального процессора 14. При отсутствии нарушений рубежа охраны человеком в НЧ-сигнале будет отсутствовать амплитудная модуляция. При движении человека - нарушителя через рубеж охраны в НЧ-сигнале появится переменная составляющая (амплитудная модуляция). Известен, например, принцип формирования переменной составляющей (огибающей) НЧ-сигнала в двухпозиционном радиолучевом (радиоволновом) средстве обнаружения при пересечении человеком - нарушителем 19 зон Френеля на рубеже охраны в зоне обнаружения. Типовая форма изменения амплитуды принимаемого НЧ-сигнала при движении нарушителя (модуляция сигнала) описана, например, в работе Магауенова Р.Г. Системы охранной сигнализации: основы теории и принципы построения». Учебное пособие. - М., Горячая линия - Телеком, 2004. - Гл. 3, п. 3.2, с. 134-138. Объяснение принципа формирования переменной составляющей (огибающей) сигнала за счет зон Френеля приведено, например, в другом источнике информации - патенте RU №2455692, на с. 4, 5. Таким образом, НЧ-сигнал, поступающий на вход сигнального процессора 14, несет в себе информацию о пересечении человеком - нарушителем рубежа охраны. Работа сигнального процессора 14 осуществляется на программном уровне с использованием констант, базы данных и управляющих программ, расположенных во внутренней памяти сигнального процессора. Пример общего алгоритма работы сигнального процессора 14 представлен на фиг. 2. Алгоритм основан на последовательном повторении во времени трех шагов (этапов) работы устройства, отмеченных на фиг. 2 символами: шаг 1…шаг 3. Работа сигнального процессора 14 после установки устройства на рубеже охраны и его первого включения (шаг 1) начинается с автоматического процесса взаимной юстировки передающего 3 и приемного 4 блоков с помощью соответствующих первого 8, второго 9, третьего 11 и четвертого 12 сервоприводов. Сервоприводы (см. фиг. 1), механически крепятся к указанным блокам. Каждый из сервоприводов обеспечивает юстировку по азимуту или по углу места. Процесс юстировки выполняется под управлением сигнального процессора 14 без участия человека. Конечная цель юстировки - получение оптимального уровня сигнала на приемной стороне. Команды на юстировку передающего блока 3 по азимуту с помощью первого сервопривода 8 поступают от сигнального процессора 14 по первой линии интерфейса 15 через первый коммутатор 10. Соответственно, команды на юстировку передающего блока 3 по углу места с помощью второго сервопривода 9 поступают также от сигнального процессора 14 по первой линии интерфейса 15 через первый коммутатор 10. Аналогично, юстировка приемного блока 4 по азимуту и углу места осуществляется, соответственно, по командам от сигнального процессора 14, поступающим по второй линии интерфейса 16 через второй коммутатор 13.
Рассмотрим алгоритм автоматической взаимной юстировки передающего 3 и приемного 4 блоков, имеющих узкие диаграммы направленности (не более 10°) по вертикали и горизонтали. В действующем макете предлагаемого устройства автоматическая юстировка проводилась в диапазоне ± 10° по углу места и ± 47° по азимуту от вертикальной и горизонтальной нормалей. Перед процессом автоматической юстировки передающий 3 и приемный 4 блоки были сориентированы друг к другу в направлении осевой линии зоны обнаружения.
Алгоритм автоматической юстировки
1. Установить приемный блок 4 в крайнее левое нижнее положение, а передающий блок 3 - в крайнее левое верхнее положение.
2. На первый сервопривод 8 через первый коммутатор 10 подать команду на юстировку передающего блока 3 по азимуту до противоположного по горизонтали состояния.
3. Во время движения передающего блока 3 по азимуту, с частотой не менее 10 Гц измерять и фиксировать значение уровня сигнала.
4. При достижении передающего блока 3 крайнего положения, юстировать приемный блок 4 по азимуту путем подачи соответствующей команды на третий сервопривод 11 через второй коммутатор 13 в течение 2 секунд (приблизительно на 3-5°). Если найденный максимум сигнала на данном шаге больше предыдущего сохраненного, то следует заменить его и зафиксировать наклоны передающего 3 и приемного 4 блоков по углу места.
5. Повторить пп. 2-4 до достижения приемным блоком крайнего положения по азимуту.
6. Изменить положение передающего 3 и приемного 4 блоков по углу места примерно на 2°: приемного блока - вниз, передающего блока - вверх. Повторять пп. 2-6 до одного из возможных случаев 6.1 или 6.2.
6.1. Пройден весь диапазон по углу места:
- без нахождения сигнала (при уровне сигнала менее 6% выдать сообщение «Неисправность»);
- при нахождении сигнала установить передающий 3 и приемный 4 блоки на сохраненный угол (см. пп. 2- 5) по углу места и перейти к п. 7.
6.2. Если при текущей юстировке по азимуту уровень сигнала меньше последнего зафиксированного на 10%, то установить передающий 3 и приемный 4 блоки на сохраненный угол по углу места и перейти к п. 7, установив по азимуту оба блока в крайнее левое положение.
7. На первый сервопривод 8 через первый коммутатор 10 подать команду на юстировку передающего блока 3 по азимуту до противоположного по горизонтали состояния.
8. Во время юстировки передающего блока 3 по азимуту, с частотой не менее 10 Гц измерять и фиксировать значение уровня сигнала.
9. При достижении передающим блоком 3 крайнего положения, юстировать приемный блок 4 по азимуту путем подачи соответствующей команды на третий сервопривод 11 через второй коммутатор 13 в течение 2 секунд (приблизительно на 3-5°). Если найденный максимум сигнала на данном шаге больше предыдущего сохраненного, то следует заменить его и зафиксировать наклоны передающего 3 и приемного 4 блоков по углу места.
10. Последовательно изменяя положения приемного блока 4 по азимуту определить максимум сигнала и сохранить при этом угол отклонения антенны.
11. Зафиксировать в памяти сигнального процессора 14 сохраненные значения углов направления в пространстве передающего 3 и приемного 4 блоков.
Примечания
После выполнения процесса юстировки при последующих выключениях и включениях электропитания устройства в дальнейшем автоматическая юстировка на первом этапе (шаг 1) может быть пропущена (см. фиг. 2).
В процессе автоматической юстировки сигнальный процессор 14 автоматически корректирует усиление в приемном тракте устройства путем воздействия на усилитель низкой частоты 6 по его второму входу. Такая коррекция необходима, например, при избыточно большом уровне сигнала, приводящем приемный тракт в насыщение. Уменьшение коэффициента усиления позволяет выйти из режима насыщения и перейти в оптимальный режим в соответствии с динамическим диапазоном устройства. Таким образом, после выполнения автоматической юстировки обеспечивается необходимый оптимальный уровень принимаемого сигнала. Если все же уровень сигнала будет недостаточным (слишком малым), то в этом случае сигнальный процессор 14 выдаст сигнал неисправности на втором его выходе, например, в виде постоянного уровня напряжения, свидетельствующего о невозможности дальнейшего функционирования устройства.
В процессе эксплуатации устройства также осуществляется автоматическая корректировка положений передающего и приемного блоков по углу места. В случаях, например, сезонных усадок почвы и, как следствие, отклонения блоков от закрепленного по углу места положения, может измениться уровень сигнала. В процессе работы сигнальный процессор 14 непрерывно контролирует указанные углы отклонения блоков от положения, зафиксированного в процессе автоматической юстировки. При их отклонении до критического положения, осуществляется последующая коррекция путем повторной автоматической юстировки (см. фиг. 2).
Следующим этапом обобщенного алгоритма работы сигнального процессора (шаг 2) является пороговая обработка полезного НЧ-сигнала. На этом этапе происходит сравнение отрицательных выбросов сигнала с отрицательным пороговым уровнем, а положительных выбросов сигнала - с положительным пороговым уровнем. Превышение сигналом пороговых уровней свидетельствует о нахождении передвигающегося нарушителя в зоне обнаружения в границах первой зоны Френеля. Поочередное превышение по времени всех пороговых уровней (выполнение решающего правила) свидетельствует о прохождении нарушителя через зону обнаружения с пересечением ее осевой линии, что является нарушением охраняемого рубежа. Далее (шаг 3) осуществляется формирование сигнала тревоги на втором выходе сигнального процессора 14 в виде, например, импульса напряжения определенной длительности. На этом же выходе сигнал неисправности может быть сформирован, например, в виде постоянного уровня напряжения.
В качестве примера реализации сигнального процессора 14 устройства может быть использован микропроцессор A Txmega 256А3 фирмы «Atmel». В качестве реализации сервоприводов 8, 9 и 11, 12 могут быть использованы, например, серийные сервоприводы фирм Corona, Futaba и Kin-со.
Возможность юстировки передающих и приемных блоков устройства по азимуту и углу места в автоматическом режиме (без участия человека) может найти широкое применение, например, при организации рубежей охраны с применением предложенного устройства в быстро развертываемых (мобильных) охранных системах.
Действующий лабораторный макет устройства подвергался всесезонным испытаниям в течение одного года. Была подтверждена устойчивая работоспособность действующего лабораторного макета по обнаружению нарушителя после автоматического процесса взаимной юстировки передающего и приемного блоков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальное радиолучевое устройство для тревожной сигнализации с пониженным энергопотреблением | 2018 |
|
RU2698770C1 |
| Интеллектуальный радиолучевой датчик для тревожной сигнализации | 2015 |
|
RU2610549C1 |
| РАДИОЛУЧЕВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С ВОЗМОЖНОСТЬЮ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПЕРЕСЕЧЕНИЯ НАРУШИТЕЛЕМ РУБЕЖА ОХРАНЫ | 2015 |
|
RU2600432C1 |
| ИНФРАКРАСНАЯ АКТИВНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2014 |
|
RU2573261C2 |
| Инфракрасная активная система для контроля протяженных рубежей охраны | 2019 |
|
RU2722927C1 |
| Способ обнаружения нарушителя на контролируемом рубеже | 2019 |
|
RU2719505C1 |
| МАЛОКАДРОВАЯ МОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2012 |
|
RU2504015C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2543930C2 |
Изобретение относится к охранной сигнализации и может использоваться, в частности, для обнаружения нарушителя по факту преодоления им зоны обнаружения, создаваемой устройством. Технический результат - обеспечение возможности юстировки передающих и приемных блоков устройства по азимуту и углу места в автоматическом режиме. Устройство содержит размещенные на противоположенных сторонах рубежа охраны передатчик и приемник направленного излучения. Первый и второй сервоприводы передающего блока и третий и четвертый сервоприводы приемного блока выполнены с возможностью юстировки блоков в пространстве, соответственно, по азимуту и по углу места. Сигнальный процессор выполнен с возможностями управления первым и вторым сервоприводами передающего блока, управления третьим и четвертым сервоприводами приемного блока, пороговой обработки полезного сигнала и принятия решения о пересечении нарушителем рубежа охраны с формированием сигнала тревоги или формирования сигнала неисправности. 3 з.п. ф-лы, 2 ил.
1. Устройство для тревожной сигнализации с сервоприводами передающего и приемного блоков, содержащее размещенные на противоположенных сторонах рубежа охраны передатчик и приемник направленного излучения, формирующие вдоль рубежа охраны зону обнаружения; упомянутый передатчик на передающей стороне рубежа охраны содержит последовательно соединенные генератор импульсов и усилитель мощности, выход которого подключен к входу передающего блока, формирующего первую диаграмму направленности; упомянутый приемник на приемной стороне рубежа охраны содержит приемный блок, формирующий вторую диаграмму направленности, выход приемного блока через амплитудный детектор подключен к первому входу усилителя низкой частоты, выход которого подключен к входу фильтра, отличающееся тем, что в передатчик на передающей стороне рубежа охраны введены первый и второй сервоприводы, каждый из которых механически связан с передающим блоком, а также первый коммутатор, первый вход/выход которого подключен к входу/выходу первого сервопривода, а его второй вход/выход подключен к входу/выходу второго сервопривода; в приемник на приемной стороне рубежа охраны введены третий и четвертый сервоприводы, каждый из которых механически связан с приемным блоком, второй коммутатор и сигнальный процессор, первый вход/выход второго коммутатора подключен к входу/выходу третьего сервопривода, а его второй вход/выход подключен к входу/выходу четвертого сервопривода, выход фильтра подключен к входу сигнального процессора, первый выход сигнального процессора подключен к второму входу усилителя низкой частоты, первый вход/выход сигнального процессора подключен посредством первой линии интерфейса к третьему входу/выходу первого коммутатора, второй вход/выход сигнального процессора подключен посредством второй линии интерфейса к третьему входу/выходу второго коммутатора, второй выход сигнального процессора является выходом сигналов тревоги и неисправности.
2. Устройство по п. 1, отличающееся тем, что первый и второй сервоприводы передающего блока выполнены с возможностью юстировки его в пространстве, соответственно, по азимуту и по углу места.
3. Устройство по п. 1, отличающееся тем, что третий и четвертый сервоприводы приемного блока выполнены с возможностью юстировки его в пространстве, соответственно, по азимуту и по углу места.
4. Устройство по п. 1, отличающееся тем, что сигнальный процессор выполнен с возможностями управления первым и вторым сервоприводами передающего блока, управления третьим и четвертым сервоприводами приемного блока, пороговой обработки полезного сигнала и принятия решения о пересечении нарушителем рубежа охраны с формированием сигнала тревоги или формирования сигнала неисправности.
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| РАДИОЛУЧЕВОЙ ИЗВЕЩАТЕЛЬ ОХРАНЫ, СПОСОБ ЕГО УСТАНОВКИ И УЗЕЛ КРЕПЛЕНИЯ СВЧ ДИОДА ДЛЯ НЕГО | 1995 |
|
RU2103743C1 |
| РАДИОЛОКАЦИОННЫЙ АНТЕННЫЙ ОТРАЖАТЕЛЬ | 2004 |
|
RU2273924C1 |
| СЕНСОР ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ПРИ ПОМОЩИ СВЕРХШИРОКОПОЛОСНОГО ЗОНДИРУЮЩЕГО СИГНАЛА (ВАРИАНТЫ) | 2006 |
|
RU2311658C9 |
| РАДИОТЕХНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2006 |
|
RU2306612C1 |
| DE 102005039142 A1, 22.02.2007 | |||
| US 4334214 A1, 08.06.1982 | |||
| US 4219802 A1, 26.08.1980. | |||

