ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству, способу и системе для получения показателя жизненно важных функций, в частности информации о дыхании, объекта. В частности, настоящее изобретение относится к подходу бесконтактного оптического измерения, который может быть использован для обнаружения показателей жизненно важных функций наблюдаемого объекта, например человека или животного.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Показатели жизненно важных функций человека, например частота (HR) сердечных сокращений, частота (RR) дыхания или насыщенность крови кислородом, служат в качестве индикаторов текущего состояния человека и в качестве существенных показателей серьезных медицинских случаев. По этой причине, показатели жизненно важных функций широко отслеживаются в учреждениях стационарного и амбулаторного лечения, на дому или в дополнительных оздоровительных учреждениях, учреждениях для отдыха и занятий спортом.
WO 2012/140531 A1 раскрывает устройство обнаружения дыхательного движения для обнаружения дыхательного движения человека. Это устройство обнаружения обнаруживает электромагнитное излучение, излучаемое и/или отражаемое человеком, причем это электромагнитное излучение содержит непрерывный или дискретный сигнал характерного движения, связанный с частотой дыхания человека и другими артефактами движения, связанными с перемещением человека или связанными с условиями окружающей среды. Это устройство увеличивает надежность измерения частоты дыхания путем использования средства обработки данных, выполненного с возможностью отделения сигнала частоты дыхания от общих помех путем учета заданного диапазона частот, общего заданного направления или ожидаемого диапазона амплитуд и/или профиля амплитуд, чтобы отличать различные сигналы.
Неинвазивные измерения частоты дыхания могут быть выполнены оптически путем использования неподвижной видеокамеры. Видеокамера фиксирует дыхательные перемещения грудной клетки пациента в потоке изображений. Дыхательные перемещения приводят к временной модуляции определенных признаков изображения, причем частота модуляции соответствует частоте дыхания отслеживаемого пациента. Примеры таких признаков изображения представляют собой среднюю амплитуду в исследуемой пространственной области около грудной клетки пациента, или местоположение максимального значения пространственной кросс-корреляции исследуемой области в последовательных изображениях. Качество и надежность полученной информации о показателе жизненно важных функций в значительной степени зависит от качества входных данных изображения, зависящих от подходящего выбора контрастности изображения и выбранной исследуемой области.
Отслеживание дыхания с помощью камеры основано на обнаружении незначительного дыхательного движения в выбранной исследуемой области (ROI) в грудной/брюшной области. В сценариях использования в реальной жизни статический шум, присутствующий на изображении (включая ROI), может быть зарегистрирован, усилен и (ошибочно) распознан в качестве сигнала дыхания. Это может происходить в случаях, когда анализируется только ROI, а также, когда целое изображение разделено на пространственные блоки, которые анализируются отдельно. Разумеется, шум может быть зарегистрирован в качестве сигнала дыхания, если конечный восстановленный сигнал используется для оценки его достоверности, так как в этом случае отделение шума от дыхания выполняется на основании амплитуды и/или частоты конечного одномерного сигнала.
US 2010/130873 A1 раскрывает физиологический датчик движения на основании радара. Сигналы с доплеровским сдвигом могут быть извлечены из сигналов, принимаемых датчиком. Сигналы с доплеровским сдвигом могут быть оцифрованы и далее обработаны для извлечения информации, связанной с кардиопульмональным движением в одном или более объектах. Информация может включать в себя частоты дыхания, частоты сердечных сокращений, формы волн из-за дыхательной и сердечной деятельности, направление прихода, патологическое или парадоксальное дыхание и т.д. В различных вариантах выполнения извлеченная информация может быть отображена на дисплее.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечение устройства, способа и системы для получения информации о дыхании объекта простым и недорогим образом, в частности, для обеспечения отличия сигнала дыхания от шума в проекции, основанной на регистрации показателей жизненно важных функций.
В первом аспекте настоящего изобретения представлено устройство для получения показателя жизненно важных функций объекта, которое содержит:
интерфейс для приема набора кадров изображения объекта,
блок анализа для определения количества изменений направления и/или временных интервалов между изменениями направления в исследуемой области в поднаборе кадров изображения, содержащем несколько кадров изображения указанного набора, причем изменение направления указывает изменение направления движения, появляющееся в указанной исследуемой области,
блок оценки для определения, содержит ли указанная исследуемая область в указанном поднаборе кадров изображения информацию о показателе жизненно важных функций и/или шум, посредством использования определенного количества изменений направления и/или временных интервалов для указанного поднабора кадров изображения, и
процессор для определения требуемого показателя жизненно важных функций объекта из указанной исследуемой области в указанном поднаборе кадров изображения, если определено, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций.
Во втором аспекте настоящего изобретения представлен способ получения показателя жизненно важных функций объекта, который содержит этапы, на которых:
принимают набор кадров изображения объекта,
определяют количество изменений направления и/или временные интервалы между изменениями направления в исследуемой области в поднаборе кадров изображения, содержащем несколько кадров изображения указанного набора, причем изменение направления указывает изменение направления движения, появляющееся в указанной исследуемой области,
определяют, содержит ли указанная исследуемая область в указанном поднаборе кадров изображения информацию о показателе жизненно важных функций и/или шум посредством использования определенного количества изменений направления и/или временных интервалов для указанного поднабора кадров изображения, и
определяют требуемый показатель жизненно важных функций объекта из указанной исследуемой области в указанном поднаборе кадров изображения, если определено, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций.
В дополнительных аспектах настоящего изобретения представлена система для получения показателя жизненно важных функций объекта, причем указанная система содержит блок изображения для получения набора кадров изображения объекта и устройство, которое здесь раскрыто, для получения показателя жизненно важных функций объекта посредством использования указанного набора кадров изображения объекта.
В еще дополнительных аспектах настоящего изобретения обеспечена компьютерная программа, которая содержит средство программного кода, чтобы заставлять компьютер выполнять этапы способа обработки, когда указанная компьютерная программа выполняется на компьютере, а также долговременную считываемую компьютером среду для записи, которая хранит в себе компьютерный программный продукт, который при выполнении процессором вызывает выполнение способа, раскрытого здесь.
Предпочтительные варианты выполнения изобретения определены в зависимых пунктах формулы изобретения. Должно быть понятно, что заявленный способ, система, компьютерная программа и среда имеют подобные и/или идентичные предпочтительные варианты выполнения, как заявленное устройство, и как определено в зависимых пунктах формулы изобретения.
Вышеописанная проблема может быть решена посредством анализа векторов движения на каждый блок пикселей исследуемой области. Например, однородная область движения, создаваемая смежными пространственными блоками, будет указывать, что обнаруженный сигнал представляет собой дыхательное движение. Однако этот способ является очень дорогостоящим (требует точной оценки движения), требует тщательной настройки параметров для анализа векторов движения, и, тем не менее, не решает проблему для всех случаев (например, поверхностное дыхание может быть нераспознаваемым посредством оценки движения). Другие возможные решения могут основываться на частотном анализе для отделения непериодического сигнала шума от дыхания. Однако сигнал дыхания часто также является непериодическим. Более того, из-за низкой частоты сигнала дыхания частотный анализ может требовать очень большого временного окна.
Настоящее изобретение обеспечивает простые, недорогие устройство и способ для надежного отделения показателя жизненно важных функций, в частности, сигнала поверхностного дыхания, от шума в регистрации показателей жизненно важных функций с использованием набора кадров изображения, получаемых, например, от камеры. Настоящее изобретение основано на идеи фокусирования на необработанных входных значениях (т.е. кадрах изображения), которые используются для создания восстановленного сигнала (т.е. информационного сигнала показателя жизненно важных функций или показателя жизненно важных функций, получаемого из информационного сигнала показателя жизненно важных функций), а не на восстановленном сигнале, и наблюдениях количества изменений направления и/или временных интервалов между изменениями направления в исследуемой области, измеренных в единицу времени (т.е. в поднаборе кадров изображения, содержащем заданное или изменяющееся количество последовательных кадров изображения) для отделения информации о показателе жизненно важных функций и шума. Это, в частности, решается, если из кадров изображения поднабора, может быть извлечен показатель жизненно важных функций, предпочтительно, если имеется достаточно большое отношение сигнала к шуму для получения показателя жизненно важных функций с требуемой точностью и надежностью, или, если используемые кадры изображения главным образом содержат шум. Изобретение основано на наблюдении этих необработанных входных значений, которые показывают, что количество изменений направления (или изменений показателя) в (зашумленном) статическом отображении гораздо выше, и/или временные интервалы между изменениями направления ниже, чем, когда отображение содержит дыхательное движение.
Согласно варианту выполнения указанный блок оценки выполнен с возможностью определения, ниже ли определенное количество изменений направления, чем заданное пороговое значение изменений направления, указывающее, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций. Указанное пороговое значение изменений направления может быть заданным или изменяемым, например, адаптируемым согласно частоте кадров в поднаборе или устанавливаемым пользователем. Изменение направления в общем относится к (изменению) направления корреляционного пика между двумя последовательными кадрами изображения. Изменение направления также может быть определено посредством обнаружения пересечения нуля в пределах проекции, как будет объяснено ниже. После изменений направления проекция пересекает нулевую ось так, что пересечение нуля может быть использовано в качестве индикатора изменения направления.
Согласно другому варианту выполнения обеспечен основанный на проекции подход, согласно которому указанный блок анализа выполнен с возможностью определения профиля проекции в заданном направлении из указанного поднабора кадров изображения и с возможностью определения указанного количества изменений направления из указанного профиля проекции. Отслеживание дыхания с помощью проекций описано в вышеупомянутом WO 2012/140531 A1. Концепция создания проекции и профиля проекции (совокупности профилей проекций, называемой здесь профиль движения; причем конечный одномерный сигнал может быть восстановлен из профиля движения), как описано в WO 2012/140531 A1, оценена здесь. Конечный одномерный сигнал может быть восстановлен из «профиля движения». Связанные объяснения WO 2012/140531 A1, таким образом, включены здесь путем ссылки.
В общем профиль представляет собой одномерное представление кадра изображения, полученное с помощью преобразований проекций. В более широком смысле, профиль может представлять собой любую функцию, которая фиксирует информацию о текстуре, границах или любых других деталях, присутствующих в кадре изображения. В его наиболее простой форме профиль может быть таким же, как проекция (скопление пиксельных значений в одном направлении); в более широком смысле, профиль может представлять собой продукт проекции и другой функции пикселей (например, стандартного отклонения). Таким образом, проекция представляет собой часть профиля.
Предпочтительно профиль построен для каждого кадра.
Пример проекции представляет собой построчное (или постолбцовое) объединение (например, совокупность) пиксельных значений с кадром изображения.
В другом варианте выполнения указанный блок анализа выполнен с возможностью определения двух профилей проекций в двух заданных ортогональных направлениях из указанного поднабора кадров изображения и с возможностью определения указанного количества изменений направления из указанных профилей проекций. Это увеличивает надежность и точность отделения информации о показателе жизненно важных функций и шума.
Это может быть дополнительно улучшено с помощью варианта выполнения, согласно которому указанный блок оценки выполнен с возможностью принятия решения, что указанная исследуемая область указанного поднабора кадров изображения содержит информацию о показателе жизненно важных функций, если изменения направления проявляются по существу в одни и те же моменты времени в обоих профилях проекций.
Предпочтительно блок управления обеспечен для управления количеством кадров изображения указанного поднабора кадров изображения, используемых для определения количества изменений направления, заданного порогового значения изменений направления и/или исследуемой области в пределах указанных кадров изображения. Таким образом, количество кадров изображения может быть изменено, и последовательные поднаборы кадров изображения также могут быть перекрывающимися и содержать несколько одинаковых кадров изображения, т.е. подход со скользящим «окном» (соответствующем поднабору кадров изображения) может быть использован в варианте выполнения.
Согласно варианту выполнения указанный блок оценки выполнен с возможностью определения, превышает ли количество определенных последовательных временных интервалов между изменениями направления заданное пороговое значение временных интервалов, указывающее, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций. Также указанное пороговое значение временных интервалов может быть заданным или изменяемым, например, адаптируемым согласно количеству кадров изображения в пределах поднабора или устанавливаемым пользователем.
На начальном этапе должна быть выбрана исследуемая область. С этой целью устройство предпочтительно содержит блок выбора ROI для выбора исследуемой области в указанном поднаборе кадров изображения посредством
определения двух профилей проекций в двух заданных ортогональных направлениях из указанного поднабора кадров изображения,
разделения указанных профилей проекций на области проекций,
определения количества изменений направления и/или временных интервалов между изменениями направления в указанных областях проекций,
выбора двух или более смежных областей проекций, имеющих наименьшие количества изменений направления и/или наибольшие временные интервалы между изменениями направления, причем указанные выбранные области проекций представляют собой исследуемую область.
Указанный блок выбора ROI предпочтительно выполнен с возможностью
выбора областей проекций, имеющих количество изменений направления ниже первого порогового значения областей проекций и/или временных интервалов выше второго порогового значения областей проекций,
выбора среди указанных областей проекций пары областей проекций в обоих профилях проекций, имеющих по существу равное количество изменений направления и/или по существу равные временные интервалы, причем указанные пары областей проекций образуют отдельные исследуемые области.
Таким образом, одна или более оптимальных исследуемых областей могут быть автоматически обнаружены.
Хотя изобретение может быть использовано для получения различных видов показателей жизненно важных функций, оно предпочтительно подходит для получения информации о дыхании, в частности, частоты дыхания объекта. Соответственно указанный процессор предпочтительно выполнен с возможностью определения информации о дыхании объекта из указанной исследуемой области в указанном поднаборе кадров изображения.
В предпочтительном варианте выполнения предложенное устройство дополнительно содержит блок изображения, в частности, камеру, для удаленного обнаружения электромагнитного излучения, излучаемого или отражаемого от объекта. Блок изображения, в частности, подходит для применения в удаленном отслеживании. Блок изображения может содержать один или более элементов изображения. Например, блок изображения может содержать группу фотодиодов или устройств с зарядовой связью. Согласно одному варианту выполнения блок изображения содержит по меньшей мере две группы элементов изображения, каждая из которых выполнена для обнаружения одного из компонентов сигнала данных. Согласно другому варианту выполнения блок изображения может использовать одну группу элементов изображения, имеющую характеристику чувствительности, обеспечивающую обнаружение компонентов сигнала данных. Блок изображения может быть дополнительно выполнен с возможностью фиксации последовательности кадров изображения, альтернативно представляющей компоненты сигнала данных.
В другом предпочтительном варианте выполнения предложенное устройство дополнительно содержит источник излучения, в частности, источник света для направления электромагнитного излучения к объекту. Источник излучения может быть выполнен посредством широкополосного источника освещения и/или может использовать одну группу, или две, или даже больше групп элементов излучения. Однако предложенное устройство необязательно должно содержать источник излучения, но также может использовать внешние источники света, которые не соединены с устройством.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения будут понятны и объяснены со ссылкой на вариант(ы) выполнения, описанный(ые) далее на чертежах, где:
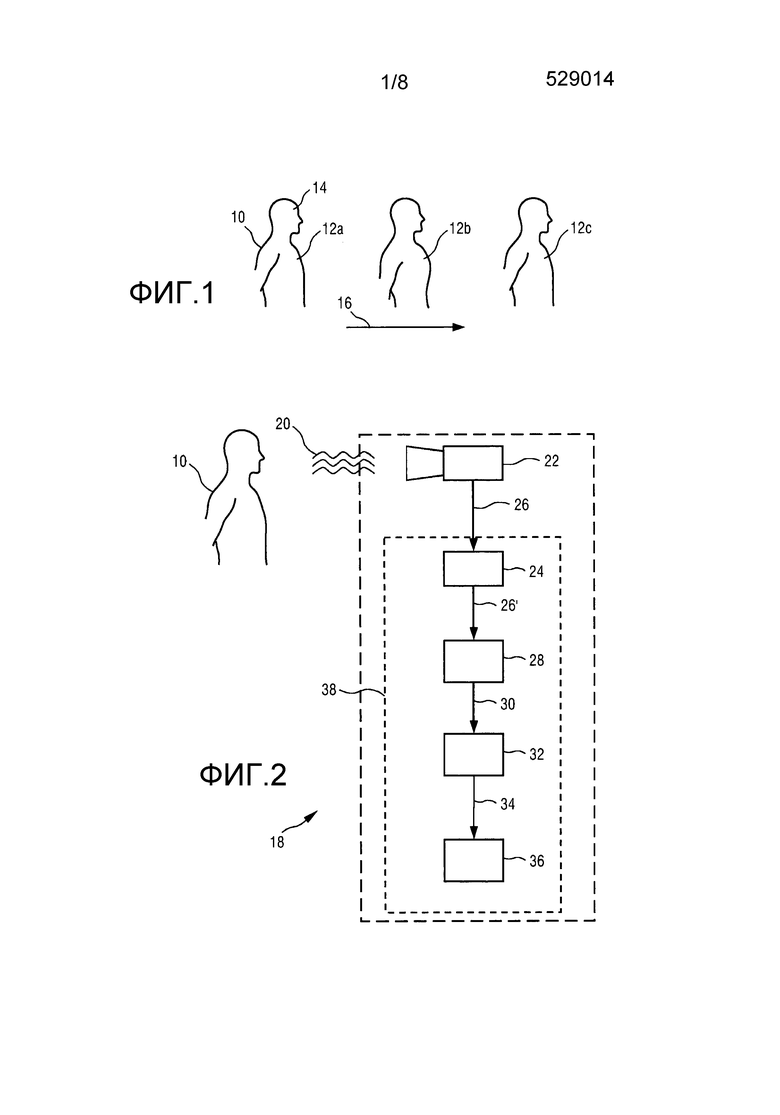
Фиг. 1 показывает схематическую иллюстрацию движения объекта, указывающего примерный сигнал жизненно важных функций,
Фиг. 2 показывает схематическую иллюстрацию общей схемы известного устройства,
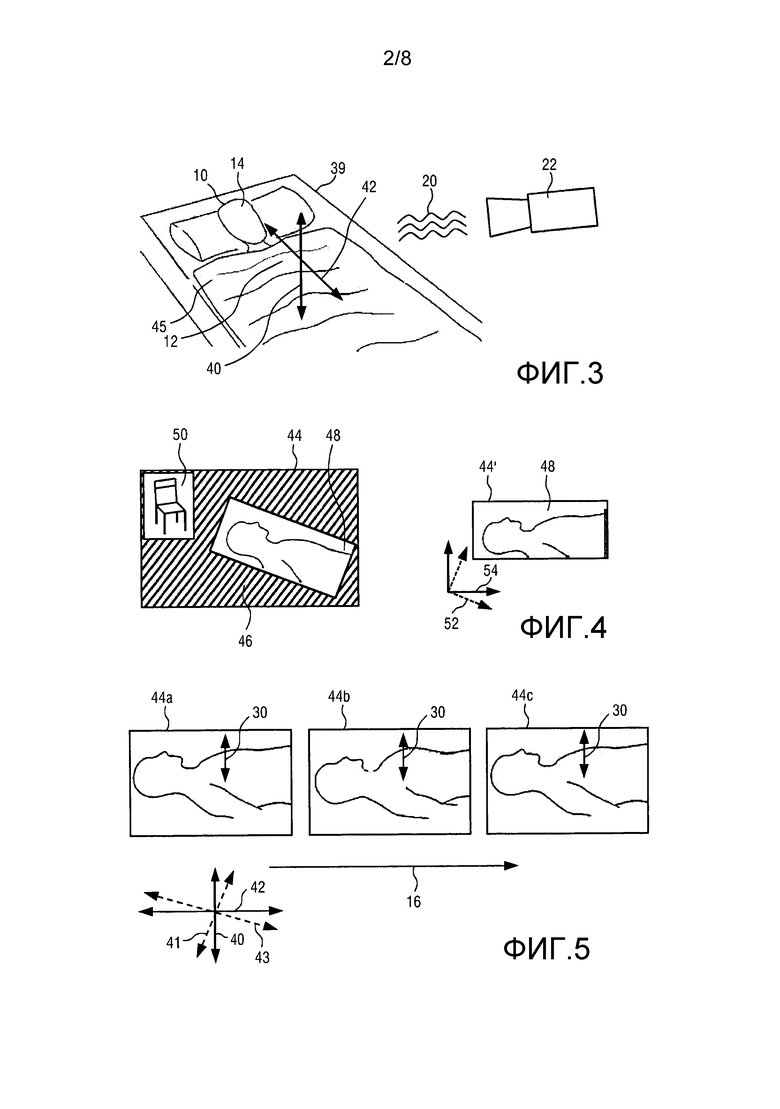
Фиг. 3 показывает схематическую иллюстрацию расположения объекта для отслеживания,
Фиг. 4 показывает схематическую иллюстрацию примерного кадра потока данных, из которого может быть получен характерный указательный элемент,
Фиг. 5 показывает схематическое примерное изображение последовательности кадров потока данных, из которой может быть получено множество характерных указательных элементов,
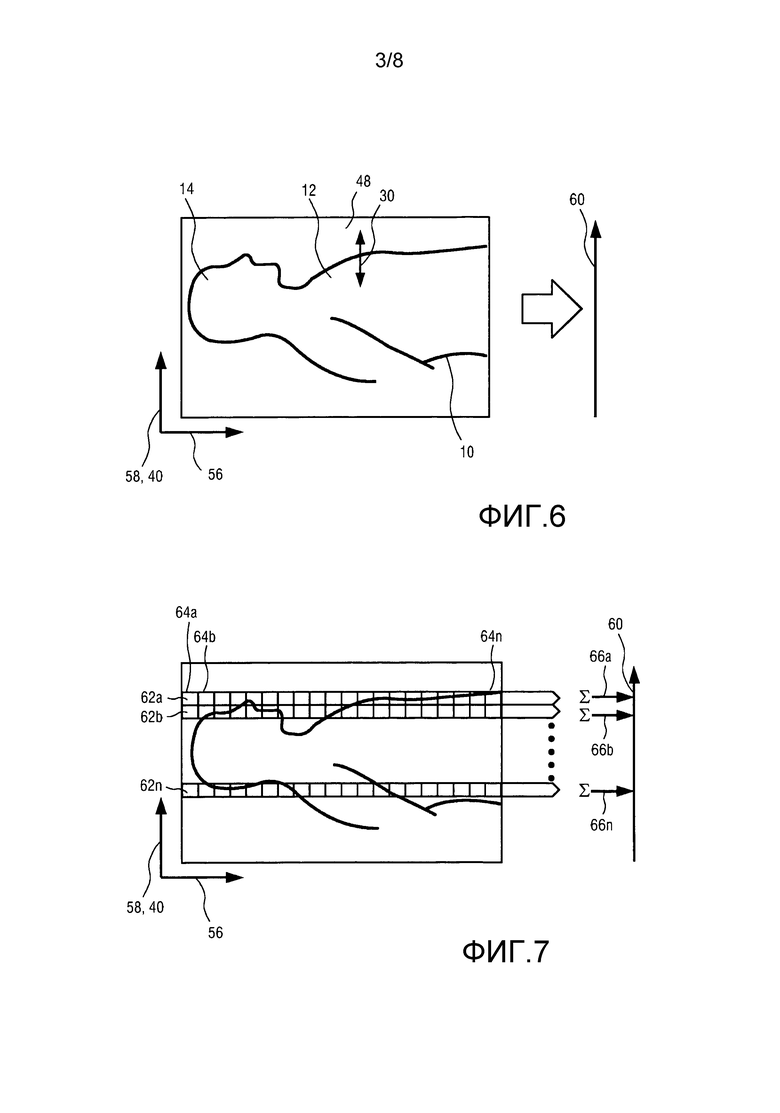
Фиг. 6 показывает дополнительный схематический примерный кадр потока данных и уменьшенный в размере характерный указательный элемент, полученный из него,
Фиг. 7 иллюстрирует примерное получение характерного указательного элемента на Фиг. 6
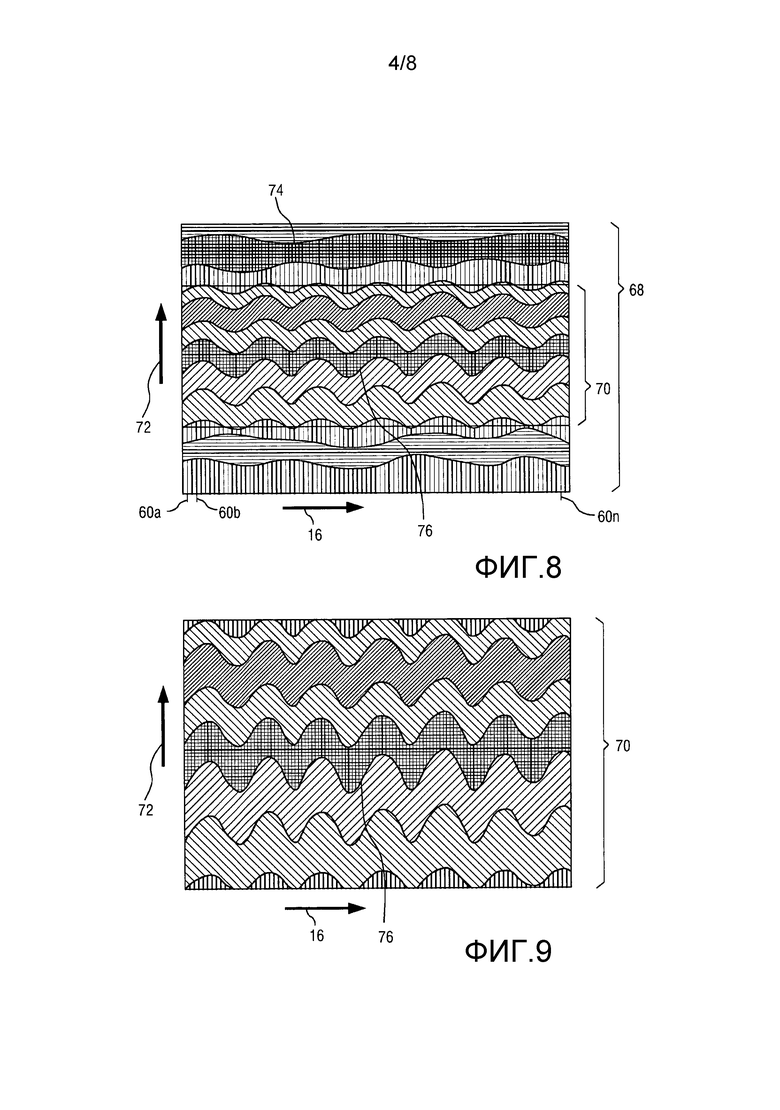
Фиг. 8 показывает упрощенную схематическую последовательность характерных указательных элементов,
Фиг. 9 показывает растянутый подробный вид упрощенной схематической последовательности характерных указательных элементов на Фиг. 8,
Фиг. 10 иллюстрирует схематическую последовательность характерных указательных элементов, к которой применено интегральное преобразование, и примерную иллюстрацию полученной последовательности диапазона значений,
Фиг. 11 показывает схематическую иллюстрацию производной формы сигнала,
Фиг. 12 показывает дополнительную схематическую иллюстрацию производной формы сигнала, к которой применена примерная компенсация для компонентов сигнала помехи,
Фиг. 13 показывает схематическую диаграмму устройства согласно настоящему изобретению, и
Фиг. 14 показывает диаграмму, иллюстрирующую определение значения из двух профилей проекций.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 показывает схематическую иллюстрацию объекта 10, который совершает движение, указывающее исследуемый сигнал. Объект 10 совершает характерное движение показательного участка 12 вследствие дыхания. При дыхании расширение и сжатие легких вызывает незначительное движение характерных участков живых существ, например, подъем и опускание грудной клетки. Также брюшное дыхание может вызывать характерное движение соответственных частей корпуса объекта. По меньшей мере частично периодические траектории движения, вызываемые физиологическими процессами, могут происходить у многих живых существ, в частности, у людей или животных.
С течением времени, как обозначено стрелкой 16, показательный участок 12 перемещается между сжатым положением, обозначенным ссылочной позицией 12a, 12c, и расширенным положением, обозначенным ссылочной позицией 12b. В сущности, на основании этой траектории движения, например, может быть оценена частота дыхания или вариабельность частоты дыхания. Хотя показательный участок 12 пульсирует с течением времени, непоказательный участок 14 остается по существу неподвижным. Разумеется, также непоказательный участок 14 совершает разнообразные движения с течением времени. Однако эти движения не соответствуют периодической пульсации показательного участка 12.
В этом контексте, на Фиг. 2 устройство, которое описано в WO 2012/140531 A1, для извлечения информации проиллюстрировано и обозначено ссылочной позицией 18. Устройство 18 может быть использовано для записи кадров изображения, представляющих объект 10. Кадры изображения могут быть получены из электромагнитного излучения 20, излучаемого или отражаемого объектом 10. Для извлечения информации из записанных данных, например, последовательности кадров изображения, определенная часть или участок объекта 10 может наблюдаться средством 22 обнаружения. Средство 22 обнаружения может быть выполнено, например, посредством камеры, выполненной с возможностью фиксации информации, принадлежащей по меньшей мере спектральному компоненту электромагнитного излучения 20. Устройство 18 также может быть выполнено с возможностью обработки входных сигналов, а именно входного потока данных, уже записанного заранее и в то же время сохраненного или буферизованного. Как обозначено выше, электромагнитное излучение 20 может содержать непрерывный или дискретный характерный сигнал, который может быть весьма показательным в отношении по меньшей мере одного по меньшей мере частично периодического сигнала жизненно важных функций.
Известные способы получения таких сигналов жизненно важных функций содержат тактильное отслеживание частоты дыхания или удаленное отслеживание частоты дыхания, основанное на метках, нанесенных на исследуемый объект. Как обозначено выше, альтернативный подход направлен на бесконтактное удаленное измерение с использованием способов обработки изображения.
Поток 26 данных, содержащий непрерывный или дискретный характерный сигнал, может быть доставлен от средства 22 обнаружения к интерфейсу 24. Разумеется, буферное средство также может быть помещено между средством 22 обнаружения и интерфейсом 24. После интерфейса 24 обеспечено средство 28 извлечения, которое выполнено с возможностью извлечения требуемой физиологической информации (а именно встроенной в характерные указательные элементы для получения из них) из проводимого потока 26' данных, принимаемого интерфейсом 24. Физиологическая информация 30 может быть получена путем извлечения, но, тем не менее, содержит компоненты сигнала помехи. Дополнительно далее может следовать средство 32 преобразования, которое выполнено с возможностью обработки физиологической информации 30, получаемой средством 28 извлечения. Предварительно обработанный сигнал, извлекаемый средством 28 извлечения, тем не менее, может содержать большие компоненты, показывающие шум. В связи с этим средство 32 преобразования может быть применено для выделения и усиления требуемого компонента сигнала, указывающего исследуемый сигнал жизненно важных функций, из общего сигнала, доставляемого ему.
После извлечения преобразованного компонента 34 сигнала, дополнительная последующая обработка данных может быть выполнена средством 36 анализа. С этой целью последующая обработка может содержать ограничение, фильтрацию ширины диапазона и/или анализ Фурье. Дополнительно могут быть предусмотрены измерения последующей обработки, способствующие еще дополнительно улучшенному обнаружению требуемого исследуемого сигнала, например, пика частоты, указывающего преобладающую частоту дыхания, в непрерывном или дискретном характерном сигнале.
Средство 28 извлечения, средство 32 преобразования и средство 36 анализа могут быть выполнены совместно посредством общего блока 38 обработки, например, центрального блока обработки, имеющего один процессор или множество процессоров. Также интерфейс 24 может быть соединен с ними в общем устройстве обработки, вмещающем соответственные подкомпоненты. Путем примера, устройство 38 обработки может быть выполнено посредством персонального компьютера, приводимого в действие соответственными логическими командами. В случае, когда средство 22 обнаружения также совместно соединено с интерфейсом 24 посредством аппаратного обеспечения, блок фиксации данных может вмещать соответственные подкомпоненты. Например, мобильное устройство, например, смартфон или мобильное устройство для контроля состояния здоровья, содержащее камеру или соединяемое с камерой, также может быть использовано для осуществления варианта выполнения изобретения.
Однако в качестве альтернативы может быть предусмотрено объединение отдельного средства 22 обнаружения с устройством 38 обработки. Это соединение может быть установлено посредством кабельных связей или посредством беспроводных связей. Вместо средства 22 обнаружения средство хранения, содержащее предварительно записанные данные, также может быть соединено с устройством 28 обработки.
На Фиг. 3 представлена общая ситуация, в которой бесконтактное обнаружение и отслеживание сигнала жизненно важных функций сталкивается с серьезными проблемами. Объект 10, например, пациент, находящийся на кровати, лежит на опоре 39. Голова объекта, содержащая непоказательный участок 14, открыта и лежит на подушке, в то время как показательный участок 12 покрыт одеялом 45. Таким образом, сигнал, вызываемый движением показательного участка 12, ослабляется. В связи с этим бесконтактное обнаружение сигнала значительно осложняется. Средство 22 обнаружения расположено так, чтобы наблюдать показательный участок 12. С этой целью примерная система координат представляет собой направление, в котором может ожидаться показательное дыхательное движение. Это направление показано указательным элементом 40 с уменьшенными помехами. Дополнительно ортогональный указательный элемент 42 (т.е. направление, в котором может быть построен профиль проекции) представляет собой направление, в котором может ожидаться небольшое указывающее дыхание движение или даже его отсутствие.
При условии, что требуемая пульсация ориентирована в одном ссылочном направлении, должно быть понятно, что ортогональный указательный элемент 42 может покрывать всю плоскость, ортогональную к указательному элементу 40 с уменьшенными помехами.
В основном, средство 22 обнаружения может быть размещено в любом направлении, при условии, что движение объекта вдоль указательного элемента 40 с уменьшенными помехами может в достаточной степени улавливаться. В связи с этим предпочтительно, если средство 22 обнаружения ориентировано по существу ортогонального указательному элементу 40 с уменьшенными помехами. Однако значительные отклонения также могут возникать, когда обнаружение требуемых сигналов, тем не менее, не обеспечивается. Таким образом, значительное движение объекта, например, когда он поднимается и поворачивается в кровати, также может быть учтено. К тому же, размещение средства 22 обнаружения по существу параллельно указательному элементу 40 с уменьшенными помехами будет вызывать серьезные отрицательные влияния на обнаружение сигнала. Снова со ссылкой на общее расположение, обеспеченное на Фиг. 3, должно быть понятно, что для некоторых потенциальных ориентаций средства обнаружения, следует ожидать, что эти отрицательные условия могут возникать, например, при размещении средства обнаружения латерально длинной стороне опоры 39. В результате при повороте на кровати указательный элемент 40 с уменьшенными помехами также поворачивается, тем самым уменьшая эффективный угол между ориентацией средства обнаружения и указательным элементом 40 с уменьшенными помехами, приводя к уменьшенному уровню сигнала.
В этом контексте, может предполагаться расположение двух или даже более средств обнаружения в различных положениях относительно объекта 10 так, чтобы обеспечивать, так сказать, стереометрическое отслеживание с возможностью отслеживания всех возможных ориентаций указательного элемента 40 с уменьшенными помехами.
Фиг. 4 изображает примерный зафиксированный кадр 44 изображения, показывающий представление объекта 10 в показательном участке 48 всего кадра. Показательный участок 48 может быть обнаружен на этом раннем этапе во время этапа предварительной обработки, обеспечивая уменьшение области обзора, тем самым уменьшая объем потока данных. Для упрощения последующей обработки преобразование координат может быть применено к обработанному кадру 44’ изображения. Таким образом, отклонение между системой 52 координат, лежащей в основе исходного зафиксированного кадра 44 изображения, и системы 54 координат указывает, что указательный элемент 40 с уменьшенными помехами и ортогональный указательный элемент 42 могут быть компенсированы.
Дополнительно Фиг. 4 показывает ссылочный участок 50 кадра 44 изображения. Ссылочный участок может представлять собой постоянные объекты изображения, которые могут быть выделены в качестве ссылочного образца для компенсации движения. Остальные участки 46 кадра 44 изображения могут быть скрыты и не учитываться для последующего анализа данных.
Фиг. 5 иллюстрирует последовательность кадров 44a, 44b, 44c изображения, представляющих дыхательное движение объекта 10, уже обозначенное на Фиг. 1. Требуемый исследуемый сигнал жизненно важных функций представлен физиологической информацией, обозначенной стрелкой 30, а именно подъемом и опусканием грудной клетки. Извлекаемая физиологическая информация 30 выровнена с указательным элементом 40 с уменьшенными помехами. Движение, выровненное с ортогональным указательным элементом 42, ориентированным ортогонально указательному элементу 40 с уменьшенными помехами, считается нехарактерным для исследуемого сигнала. Для полноты описания ссылочное направление 41 движения и ортогональное ссылочное направление 43 также проиллюстрированы на Фиг. 5. Как обозначено выше, моментальное определение указательного элемента 40 с уменьшенными помехами, например, отдельно для каждого кадра изображения может создавать серьезные проблемы. В этом контексте, отметим, что даже значительное отклонение между указательным элементом 40 с уменьшенными помехами и ссылочным направлением 41 движения не приводит к значительной потере сигнала. Вследствие этого, в любом случае, необязательно точно определять указательный элемент 40 с уменьшенными помехами с высокой точностью.
В связи с этим небольшие отклонения между указательным элементом 40 с уменьшенными помехами и ссылочным направлением 41 движения могут быть допустимы. Это обеспечивает значительное уменьшение требований компьютерной обработки. Дополнительно, принимая во внимание отношение между ожидаемыми частотами обнаруживаемого сигнала жизненно важных функций и общими частотами кадров, используемыми для обработки изображения, должно быть понятно, что для определения указательного элемента 40 с уменьшенными помехами множество кадров изображения могут быть пропущены, например, всего один из пяти или даже десяти кадров изображения должен быть рассмотрен. Например, может быть установлена схема управления, в которой установлено пороговое значение, описывающее допустимое отклонение. В случае превышения порогового значения указательный элемент 40 с уменьшенными помехами регулируется. Наконец, новое пороговое значение может быть определено.
На Фиг. 6 и 7 объяснено примерное получение характерного указательного элемента 60, представляющего информацию о направленном движении. Фиг. 6 показывает показательный участок 48 кадра изображения. Координаты, описывающие положение элементов изображения, например, одиночные пиксели, обозначены ссылочными позициями 56, 58, причем ось 56 обозначает координаты x, а ось 58 координаты y. За счет преобразования координат на Фиг. 4 и 5 указательный элемент 40 с уменьшенными помехами выровнен с осью 58. При применении уменьшения размера цель заключается в объединении свойств кадра изображения в один характерный указательный элемент 60 без значительной потери сигнала в отношении требуемой физиологической информации 30, указывающей исследуемый сигнал жизненно важных функций.
В этом контексте Фиг. 7 описывает объединение и проекцию подэлементов 62, 64 для указательного элемента 40 с уменьшенными помехами. Подэлементы 62a, 62b, …, 62n и 64a, 64b, …, 64n представляют собой соответственные положения пикселей в кадре изображения. В случае, когда физиологическая информация 30 в достаточной степени представлена движением вдоль оси 58, построчное объединение соответственных пиксельных значений обобщает соответствующую информацию каждой строки в единое целое на характерном указательном элементе 60. Преобразование обозначено стрелкой 66. Путем примера, строки 62a и 62b предполагаются в качестве весьма показательных в отношении требуемого сигнала, в виде формы показательного участка 12, грудной клетки, форм значительной границы, выполняющей дыхательное движение. С другой стороны, безусловно, может быть предположено, что строка 62n, отображающая заднюю сторону объекта 10, является менее показательной. Как указано выше, кроме простых пиксельных значений дополнительные свойства изображения также могут быть выделены для объединения.
Фиг. 8 и 9 иллюстрируют примерный профиль движения, получаемый путем последовательного расположения множества характерных указательных элементов 60a, 60b, …, 60n (представляющих последовательность кадров изображения) с течением времени. Объединение отдельных элементов приводит к квазинепрерывной или непрерывной форме волны. Для визуализации профиль движения следует понимать, как представленный строго упрощенным. Различные штриховки обозначают различные результаты построчного объединения. Более того границы, обеспеченные в профиле движения, представляют собой контрастные границы в исходном кадре изображения (при условии, что они по существу ортогональны указательному элементу 40 с уменьшенными помехами). Временная пульсация границ должна пониматься как весьма показательная в отношении требуемого сигнала жизненно важных функций.
Общий профиль движения на Фиг. 8 содержит профиль, представляющий весь непрерывный или дискретный характерный сигнал 68, получаемый из последовательности изображений с помощью уменьшения размеров. Более того их поднабор, указывающий движение компонент 70 могут быть выбраны для дополнительного анализа. С этой целью основные допущения в отношении основного сигнала жизненно важных функций могут быть применены. Например, указывающий движение компонент 70 может предполагаться для совершения незначительных периодических движений вследствие дыхательного движения грудной клетки. Частота этой пульсации может ожидаться в пределах определенного диапазона частот. Таким образом, непоказательные границы 74 могут быть обнаружены и не учитываться во время дополнительных этапов анализа. С другой стороны, показательные границы 76 могут быть выделены или даже улучшены для дополнительной обработки.
Ось 72 обозначает направление информации о движении, в то время как стрелка 16 обозначает время. Отметим, что ось 72 может содержать качественную или даже количественную информацию о движении. В общем зависимая информация о номинальном положении не может быть выделена из качественной информации, например, когда шкала, представляющая продольное движение, отсутствует. Тем не менее, однако, информация о частоте может быть извлечена из качественных сигналов. В связи с этим при стремлении к количественному обнаружению движения, предпочтительно, если действительный объект, например, ссылочная шкала, обеспечивающий количественное определение движения также отслеживается, по меньшей мере во время первоначальной установки.
В общем может ожидаться, что профиль движения будет гораздо более сложным, показывающим различные колебания и многочисленные изменения и по столбам, и по строкам. Например, профиль движения может напоминать спектральный профиль, совершающий изменения во времени. Однако диапазон частот не показан в этом варианте выполнения. Вместо этого информация о частоте может быть получена из представления, обеспеченного на Фиг. 8 и 9.
Фиг. 9 иллюстрирует растянутое представление указывающего движение компонента 70 профиля движения. Показательная граница 76 соответственно увеличена. В случае, когда предполагаются многочисленные показательные границы в профиле движения, дополнительные корреляционные измерения могут быть применены так, чтобы улучшать качество сигнала. Это применяется, если несколько границ в действительном изображении совершают движения вследствие дыхания, например, множество складок и изгибов одеяла, покрывающего объект.
Показательная граница 76 может быть выбрана с помощью измерений для обнаружения границы и дополнительно выделена. Наконец, может быть получена весьма показательная единая форма волны требуемого сигнала, смотри также получение сигнала из 86 на Фиг. 11 и 12 в связи с этим.
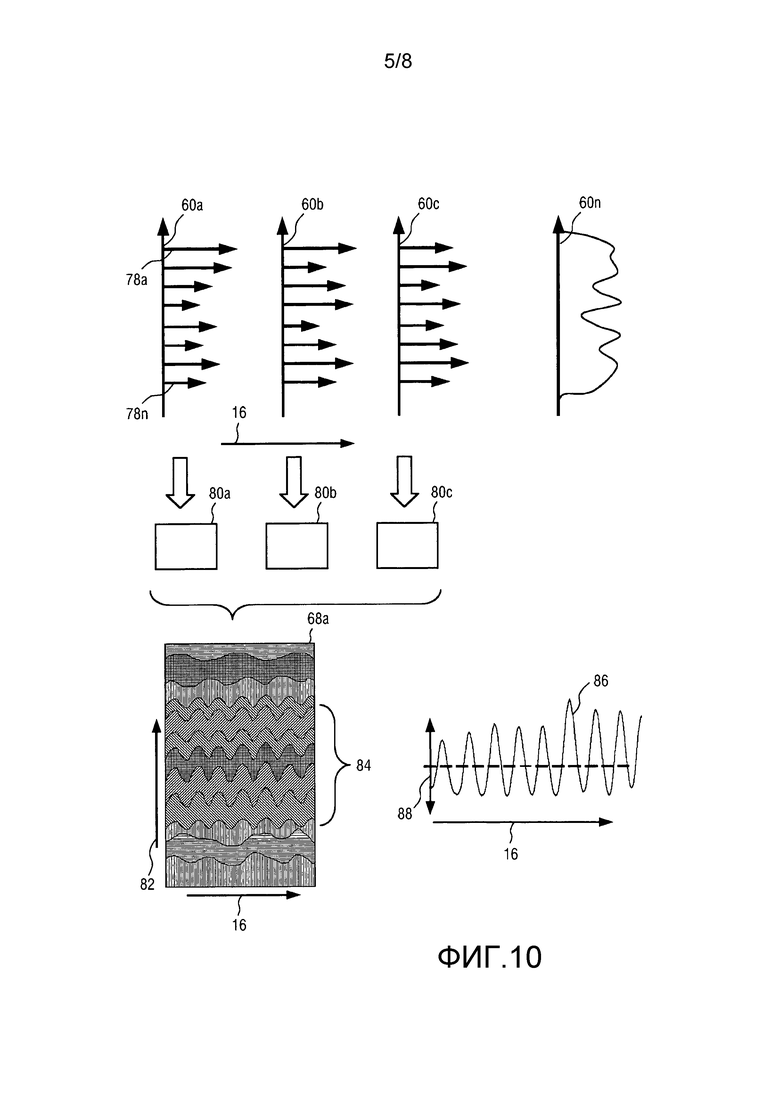
В качестве альтернативы на Фиг. 10 каждый отдельный характерный указательный элемент 60 может быть обработан до последовательного расположения и передан профилю движения. На Фиг. 10 проиллюстрированы несколько последовательных характерных указательных элементов 60a, 60b, 60c, каждый из которых содержит свойства 78, …, 78n потока данных, каждое из которых представляет объединенную и спроецированную строку одного кадра изображения, см. также Фиг. 6 и 7. С помощью интегрирования по множеству объединенных свойств 78 потока данных, может быть получен характерный указательный элемент 60n, имеющий непрерывную или квазинепрерывную форму волны.
Дополнительно интегральное преобразование, в особенности преобразование Фурье, может быть применено к каждому характерному указательному элементу 60, 60b, 60c, причем преобразование обозначено ссылочными позициями 80a, 80b, 80c. Таким образом, каждый характерный указательный элемент 60 может быть заменен или даже дополнен его диапазоном значений. Таким образом, обеспечивается область частот, основанная на представлении, а не движение, основанное на представлении. Обработанные сигналы, происходящие из характерных указательных элементов, могут быть последовательно расположены с течением времени так, чтобы получать исследуемый диапазон 84 значений. Ось 82 значений обозначает частоты, лежащие в основе представления. В основном, этот подход направлен на обнаружение требуемых сигналов жизненно важных функций на основании качественной формы волны, непоказательной в отношении количественной информации о движении.
Путем применения интегрального преобразования 80 свойства изображения (даже зафиксированные в один и тот же момент времени) проверяются на выраженные корреляции или частоты. Может быть распознано, что эти выраженные элементы также совершают пульсацию с течением времени, когда преобразованные характерные указательные элементы 60 расположены последовательно. Снова применяя измерения для обнаружения границ, может быть получена производная форма 86 сигнала, весьма показательная в отношении требуемого сигнала жизненно важных функций. Шкала 88 на Фиг. 10 считается качественной, так как она не предназначена для извлечения количественной информации о движение из производной формы 86 сигнала, полученной путем применения интегрального преобразования к характерным указательным элементам 60. В итоге, обрабатываются дополнительно или нет характерные указательные элементы 60, весьма показательная производная форма 86 сигнала может быть получена.
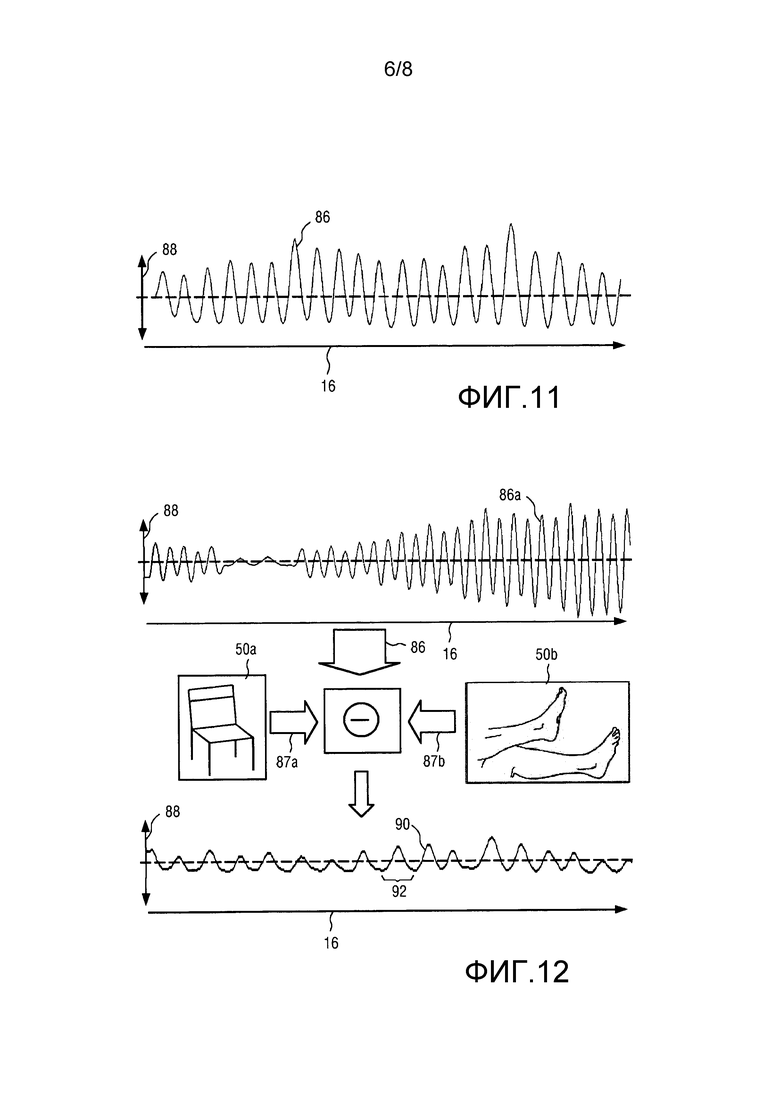
Фиг. 11 показывает иллюстрацию дополнительной примерной производной формы 86 сигнала. Хотя пульсирующий сигнал несколько нестабилен по амплитуде, основная частота может быть получена известными способами без особых усилий. Таким образом, требуемый сигнал жизненно важных функций, например, частота дыхания отслеживаемого пациента, может быть извлечен из исходного потока данных бесконтактным образом даже при плохих условиях окружающей среды.
В случае если производная форма 86 сигнала на Фиг. 11 получена путем последовательного размещения характерных указательных элементов 60 без преобразования связанных с движением сигналов в связанные с диапазоном частот сигналы, шкала 88 может быть рассмотрена как количественная шкала, показывающая информацию либо об абсолютном или относительном положении, либо в общем информацию о движении. Таким образом, даже амплитуды, например, представляющие величину движения грудной клетки, могут быть обнаружены.
Также Фиг. 12 представляет примерную производную форму 86 сигнала, полученную с помощью отслеживания и обработки данных. В отличие от Фиг. 11 производная форма 86a сигнала все же содержит большие остаточные компоненты помех. Это происходит, в частности, когда требуемое движение объекта перекрывается значительным движением помех, например, поворотом объекта на кровати или даже общим движением камеры. В таком случае, может быть предусмотрено разложение сигнала на основании ссылочных траекторий движения. С этой целью ссылочный объект может отслеживаться в дополнение к основному исследуемому объекту, смотри также ссылочный участок 50 на Фиг. 4. Обработка кадров изображения со ссылочными участками приводит к ссылочным сигналам, называемым остаточными компонентами 87 сигнала помехи. Эти компоненты могут быть, так сказать, исключены из производной формы 86a сигнала, поступающей в истинный компонент 90 движения. На Фиг. 12 остаточный компонент 87a сигнала помехи, указывающий общее движение, и остаточный компонент 87b сигнала помехи, указывающий движение объекта, вызывающее помехи, рассмотрены и проиллюстрированы соответственными ссылочными участками 50a, 50b. В итоге, частота, лежащая в основе пульсации истинного компонента 90 движения, может быть обнаружена, например, путем обнаружения ее крайних значений, как обозначено ссылочной позицией 92.
Как отмечено выше, обнаружение информации о дыхании основано на обнаружении незначительного дыхательного движения участка корпуса объекта (в общем человека, но также животного), которое показывает движение, вызываемое дыханием, в частности, грудной и/или брюшной области. Наилучшие места обычно содержат информацию о границах (для надежной оценки движения) и перемещаются вследствие дыхания, что обычно подразумевает, что они соединены с грудной клеткой или брюшной областью (но это может быть одеяло, покрывающее новорожденного, или плечо, или четкие детали на свитере взрослого человека). Менее вероятные области представляют собой конечности, которые имеют тенденцию к перемещению независимо от частоты дыхания, или части постельных принадлежностей, не находящиеся в механическом контакте с грудной или брюшной областью. Однако известные способ и устройство не могут в достаточной степени отделять требуемые сигналы дыхания от шума.
Настоящее изобретение предлагает простые и недорогие устройство и способ для надежного отличия сигнала шума от сигналов поверхностного дыхания для отслеживания показателей жизненно важных функций с помощью камеры. Предложенное устройство и способ, предложенный здесь, фокусируются на необработанных входных значениях, которые используются для создания восстановленного сигнала, а не на восстановленном сигнале и наблюдениях количества изменений направления, измеренных в единицу время для отличия между сигналом и отсутствием сигнала. Настоящее изобретение основано на наблюдении этих необработанных входных значений (т.е. проекций или сигналов 74, 76, которые показаны на Фиг. 8 и 9), которые показывают, что количество изменений направления (показателя) в (зашумленном) статическом отображении, намного выше, чем, когда отображение содержит дыхательное движение.
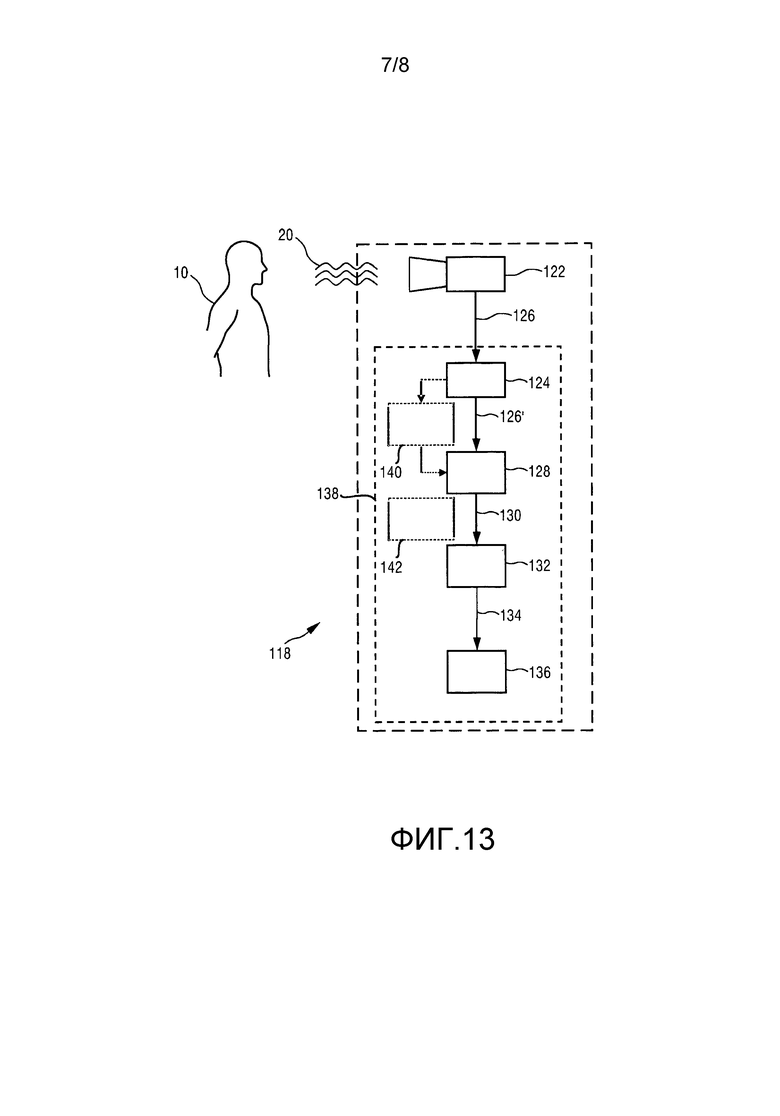
Фиг. 13 показывает схематическую диаграмму примерного варианта выполнения устройства 118 для получения показателя жизненно важных функций объекта 10 согласно настоящему изобретению. Этот вариант выполнения содержит блок 122 изображения, в частности, камеру, для удаленного обнаружения электромагнитного излучения 20, излучаемого или отражаемого от объекта. Интерфейс 124 обеспечен с возможностью приема набора кадров 126 изображения объекта 10, обеспечиваемого блоком 122 изображения. Блок 128 анализа обеспечен с возможностью определения количества изменений направления и/или временных интервалов между изменениями направления в исследуемой области в поднаборе кадров изображения, содержащем несколько кадров изображения указанного набора 26’ кадров изображения, причем изменение направления указывает изменение направления движения, проявляющееся в указанной исследуемой области. Блок 132 оценки обеспечен с возможностью определения, содержит ли указанная исследуемая область в указанном поднаборе кадров изображения информацию о показателе жизненно важных функций и/или шум путем использования определенного количества изменений направления и/или временных интервалов для указанного поднабора кадров изображения, обеспеченного в качестве выходной информации 130 из указанного блока 128 анализа. Результат 134 указанного определения обеспечен в качестве выходных данных из указанного блока 132 оценки. Наконец, процессор 136 обеспечен с возможностью определения требуемого показателя жизненно важных функций объекта из указанной исследуемой области в указанном поднаборе кадров изображения, если определено, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций.
Следует отметить, что блок 122 изображения также может представлять собой внешний блок, не являющийся частью устройства, и набор кадров 126 изображения также может быть получен заранее и сохранен в блоке хранения. Дополнительно элементы 124, 128 132 и 136 могут быть осуществлены посредством одного или более блоков обработки, например, общим компьютером.
Таким образом, в предложенном устройстве отслеживания дыхания с помощью камеры, камера используется для наблюдения объекта для измерения. В частности, грудная/брюшная область должна находиться в области обзора. До начала измерения исследуемая область (ROI) предпочтительно выбирается в грудной/брюшной области вручную или автоматически. С этой целью обеспечен возможный блок 140 выбора ROI, например, для выбора исследуемой области в указанном поднаборе кадров изображения. Поверхностное дыхательное движение в ROI далее непрерывно измеряется и анализируется для получения требуемого показателя жизненно важных функций, в частности, сигнала дыхания.
Изменение направления, таким образом, представляет собой изменение направления 72 движения показательной границы 76 для каждой проекции (=вертикальные указательные элементы 60a…60n), а временной интервал между изменениями направления, таким образом, представляет собой временной интервал между моментами, когда вектор 72 движения изменяет его направление для каждой показательной границы 76 на каждой проекции 60a…60n.
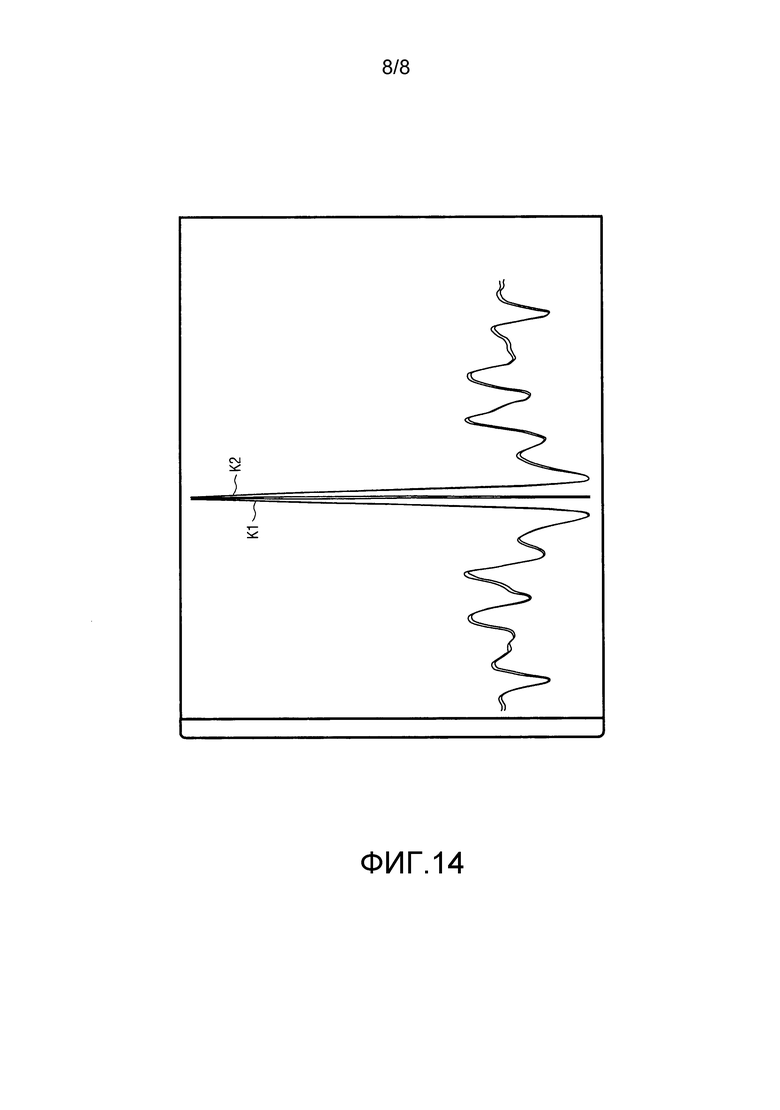
Фиг. 14 показывает диаграмму, иллюстрирующую вычисление одного значения из двух сохраненных профилей проекций. Показатель проекции обозначает направление необработанного сигнала. В варианте выполнения предложенное устройство измеряет количество наблюдаемых изменений направления в необработанном входном потоке, сравнивает его с пороговым значением для разделения сигнала дыхания и шума, и принимает решение, присутствует ли сигнал дыхания.
Две (вертикальные) кривые K1, K2 представляют собой проекции кадра видео во время T и во время T-Δ (обычно, например, 0,2 секунды). Разница (в вертикальном направлении) пиков этих двух проекций K1, K2 используется для построения сигнала дыхания (посредством интеграции). Согласно настоящему изобретению наблюдается количество изменений (в единицу времени) (и/или временной интервал между изменениями) вертикального направления, в котором перемещается пик. Для регулярного дыхания (и хорошей камеры, которая не вносит искажения сжатия) количество изменений направления будет ограничено. Когда дыхательная деятельность отсутствует, шум на изображении также будет создавать профили проекций, но они будут изменять направление более часто, что будет распознаваться и отличаться от регулярного дыхания согласно настоящему изобретению.
В предпочтительном варианте выполнения используются два параметра предложенного устройства: допустимое количество изменений направления в единицу времени (отделение поверхностного дыхания от шума) и временное окно до принятия решения, касающегося наличия сигнала дыхания (задержка для принятия решения).
В другом варианте выполнения предложенного устройства временной интервал между «пересечением нуля» (соответствующим изменению направления) необработанного сигнала непрерывно измеряется. Если интервал между такими изменениями является слишком коротким для нескольких последовательных пересечений нуля, то определяется, что сигнал дыхания отсутствует (например, пациент задерживает его дыхание) и измеренный сигнал содержит только шум, или сигнал шума преобладает над извлеченным сигналом дыхания, и в связи с этим надежное измерение дыхания невозможно. Преимущество этого варианта выполнения заключается в его очень малой задержке в обнаружении момента «отсутствия сигнала дыхания». Таким образом, в этом варианте выполнения блок 132 оценки предпочтительно выполненный с возможностью определения, ниже ли определенное количество изменений направления, чем заданное пороговое значение изменений направления, указывающее, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций.
Еще другой вариант выполнения предложенного устройства использует тот факт, что дыхательное движение грудной клетки или живота будет вызывать изменения направлений в обеих горизонтальной и вертикальной проекциях в одни и те же моменты времени, когда шум из-за его случайного характера будет приводить к смещенным изменениям направления в горизонтальной и вертикальной проекциях. В результате в этом варианте выполнения указанный блок 128 анализа предпочтительно выполнен с возможностью определения двух профилей проекций в двух заданных ортогональных направлениях из указанного поднабора кадров изображения и с возможностью определения указанного количества изменений направления из указанных профилей проекций. Предпочтительно указанный блок 132 оценки выполнен с возможностью принятия решения, что указанная исследуемая область указанного поднабора кадров изображения содержит информацию о показателе жизненно важных функций, если изменения направления появляются по существу в одни и те же моменты времени в обоих профилях проекций.
Вышеописанные варианты выполнения направлены на обнаружение отсутствия сигнала дыхания в исследуемой области, что предполагает, что ROI около грудной клетки или живота человека уже (предварительно) определены. Рассмотрим пример двух ROI, одна ROI (ROI 1) грудной области обеспечивает сигнал дыхания, а другая ROI (ROI 2) не содержит какую-либо часть человека, обеспечивает только шум. Количество «пересечений нуля» или изменений направления в ROI 2 будет гораздо больше, чем в ROI 1 (хотя амплитуды проекций могут быть подобными). К тому же, если изображение содержит только одну ROI около грудной клетки и/или живота, то только небольшие части в горизонтальной и вертикальной проекциях (которые соответствуют ROI) будут содержать небольшое количество изменений направления, в то время как все остальные части проекций (соответствующие шуму) будут иметь большое количество изменений направления.
Это наблюдение используется в дополнительных вариантах выполнения для точной настройки двумерной ROI около грудной клетки/живота или даже для полностью автоматического обнаружения ROI. Например, в варианте выполнения выполняются следующие далее этапы (например, блоком 140 выбора ROI):
Горизонтальную и вертикальную одномерные проекции делят на небольшие части; длины этих частей зависят от требуемой степени детализации размера ROI.
В каждой части обеих проекций вычисляют количество изменений направления.
Выбирают смежные части с наименьшим количеством изменений направления.
Сечение этих выбранных частей горизонтальной и вертикальной проекций будет представлять собой ROI с дыхательным движением.
В объясненном выше примере двух ROI (ROI 1 и ROI 2) часть вертикальной проекции, которая соответствует ROI 2, будет иметь гораздо большее количество изменений направления, чем часть, соответствующая ROI 1.
Вышеописанный вариант выполнения может быть дополнительно расширен, чтобы покрывать сценарии, когда несколько объектов (отслеживаемых пациентов) представлены на изображении, и показатели жизненно важных функций должны быть обнаружены и измерены для каждого из представленных объектов отдельно. В этом случае вышеописанный вариант выполнения расширен с помощью следующих далее этапов, на которых:
Обнаруживают все части в горизонтальной и вертикальной проекциях с количеством изменений направления ниже определенного порогового значения.
Образуют пары частей в горизонтальной и вертикальной проекциях с равным количеством изменений направления.
Сечения каждой из пар частей в горизонтальной и вертикальной проекциях будут представлять собой отдельные ROI около различных объектов на отображении.
Блок 132 оценки выполнен в варианте выполнения с возможностью принятия решения, что указанная исследуемая область указанного поднабора кадров изображения содержит информацию о показателе жизненно важных функций, если изменения направления появляются по существу в одни и те же моменты времени в обоих профилях проекции. В другом варианте выполнения блок 132 оценки выполнен с возможностью определения, превышает ли количество определенных последовательных временных интервалов между изменениями направления заданное пороговое значение временных интервалов, указывающее, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций.
Еще в другом варианте выполнения устройство, возможно, содержит блок 142 управления для управления количеством кадров изображения указанного поднабора кадров изображения, используемых для определения количества изменений направления, заданного порогового значения изменений направления и/или исследуемой области в указанных кадрах изображения.
В общем настоящее изобретение может быть использовано для получения различных видов показателей жизненно важных функций. Предпочтительно указанный процессор 136 выполнен с возможностью определения информации о дыхании объекта из указанной исследуемой области в указанном поднаборе кадров изображения.
Дополнительно в варианте выполнения устройство содержит источник излучения, в частности, источник света, для направления электромагнитного излучения к объекту, для улучшения условий освещения и для улучшения качества получаемого(ых) показателя(ей) жизненно важных функций.
Путем примера, настоящее изобретение может быть применено в области здравоохранения, например, бесконтактном удаленном отслеживании пациента, отслеживании новорожденного, общем надзоре, отслеживании безопасности и в так называемых средах стиля жизни, например, спортивном оборудовании, или т.п.
Хотя изобретение было проиллюстрировано и описано подробно на чертежах и в вышеупомянутом описании, такая иллюстрация и описание должны рассматриваться как иллюстративные или примерные, а не ограничивающие; изобретение не ограничивается раскрытыми вариантами выполнения. Другие варианты раскрытых вариантов выполнения могут быть поняты и осуществлены специалистом в области техники при осуществлении заявленного изобретения из изучения чертежей, раскрытия сущности изобретения и приложенной формулы изобретения.
В формуле изобретения слово «содержащий» не исключает другие элементы или этапы. Один элемент или другой блок могут выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам по себе тот факт, что определенные измерения перечислены во взаимно различных зависимых пунктах формулы изобретения, не обозначает, что совокупность этих измерений не может быть использована для преимущества.
Компьютерная программа может храниться/распространяться на подходящей долговременной среде, такой как оптическая среда хранения или твердотельная среда, поставляемая вместе с или в качестве части другого аппаратного обеспечения, но также может распространяться в других формах, например, посредством Интернета или других проводных или беспроводных телекоммуникационных систем.
Любые ссылочные позиции в формуле изобретения не должны подразумеваться как ограничивающие объем охраны.
Изобретение относится к устройству и способу получения показателя жизненно важных функций объекта. Техническим результатом является обеспечение отличия сигнала дыхания от шума в проекции, основанной на регистрации показателей жизненно важных функций. Устройство содержит интерфейс для приема набора кадров изображения объекта, блок анализа для определения количества изменений направления и/или временных интервалов между изменениями направления в исследуемой области в поднаборе кадров изображения, содержащем несколько кадров изображения указанного набора, блок оценки для определения, содержит ли указанная исследуемая область в указанном поднаборе кадров изображения информацию о показателе жизненно важных функций и/или шум посредством использования определенного количества изменений направления и/или временных интервалов для указанного поднабора кадров изображения, блок выбора для выбора исследуемой области в указанном поднаборе кадров изображения, и процессор для определения требуемого показателя жизненно важных функций объекта из указанной исследуемой области в указанном поднаборе кадров изображения. 3 н. и 10 з.п. ф-лы, 14 ил.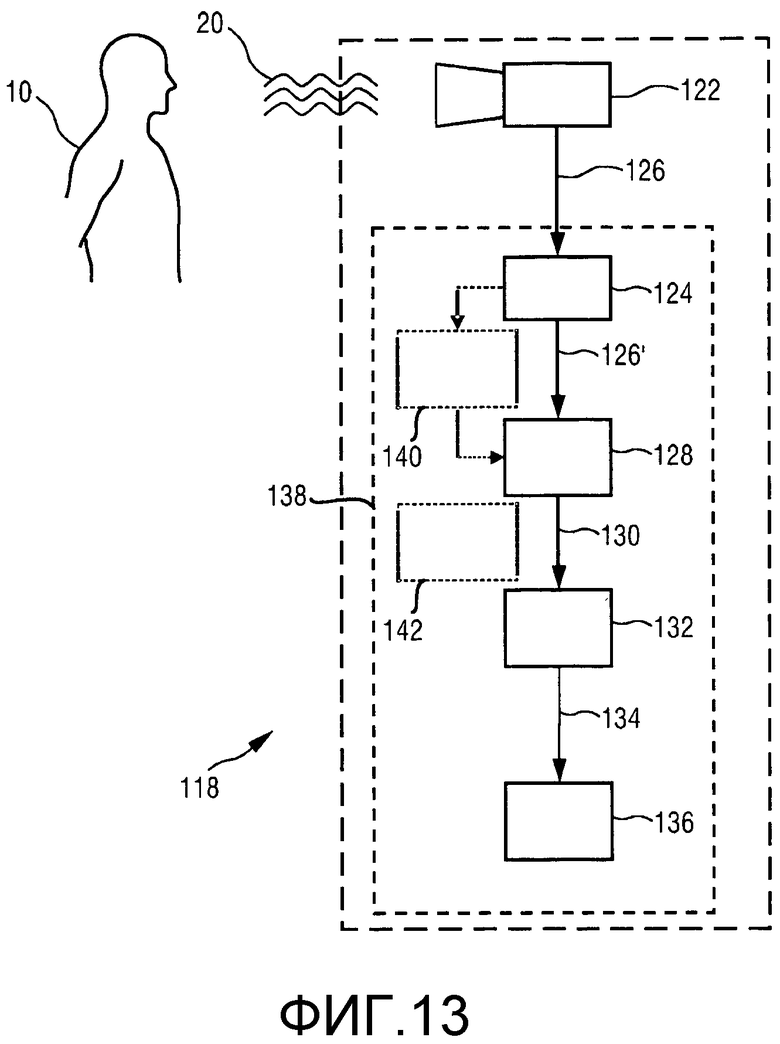
1. Устройство для получения показателя жизненно важных функций объекта, содержащее:
интерфейс (124) для приема набора кадров изображения объекта,
блок (128) анализа для определения количества изменений направления и/или временных интервалов между изменениями направления в исследуемой области в поднаборе кадров изображения, содержащем несколько кадров изображения указанного набора, причем изменение направления указывает изменение направления движения, проявляющееся в указанной исследуемой области,
блок (132) оценки для определения, содержит ли указанная исследуемая область в указанном поднаборе кадров изображения информацию о показателе жизненно важных функций и/или шум посредством использования определенного количества изменений направления и/или временных интервалов для указанного поднабора кадров изображения,
блок (140) выбора для выбора исследуемой области в указанном поднаборе кадров изображения посредством:
определения двух профилей проекций в двух заданных ортогональных направлениях из указанного поднабора кадров изображения,
разделения указанных профилей проекций на области проекций, определения количества изменений направления и/или временных интервалов между изменениями направления в указанных областях проекций,
выбор двух или более смежных областей проекций, имеющих наименьшие количества изменений направления и/или наибольшие временные интервалы между изменениями направления, причем указанные выбранные области проекций представляют собой исследуемую область,
процессор (136) для определения требуемого показателя жизненно важных функций объекта из указанной исследуемой области в указанном поднаборе кадров изображения, если определено, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций.
2. Устройство по п. 1,
в котором указанный блок (132) оценки выполнен с возможностью определения, ниже ли определенное количество изменений направления, чем заданное пороговое значение изменений направления, указывающее, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций.
3. Устройство по п. 1,
в котором указанный блок (128) анализа выполнен с возможностью определения профиля проекции в заданном направлении из указанного поднабора кадров изображения и с возможностью определения указанного количества изменений направления из указанного профиля проекции.
4. Устройство по п. 1,
в котором указанный блок (128) анализа выполнен с возможностью определения двух профилей проекций в двух заданных ортогональных направлениях из указанного поднабора кадров изображения и с возможностью определения указанного количества изменений направления из указанных профилей проекций.
5. Устройство по п. 4,
в котором указанный блок (132) оценки выполнен с возможностью принятия решения, что указанная исследуемая область указанного поднабора кадров изображения содержит информацию о показателе жизненно важных функций, если изменения направления появляются по существу в одни и те же моменты времени в обоих профилях проекции.
6. Устройство по п. 1 или 2,
дополнительно содержащее блок (42) управления для управления количеством кадров изображения указанного поднабора кадров изображения, используемых для определения количества изменений направления, заданного порогового значения изменений направления и/или исследуемой области в указанных кадрах изображения.
7. Устройство по п. 1,
в котором указанный блок (36) оценки выполнен с возможностью определения, превышает ли количество определенных последовательных временных интервалов между изменениями направления заданное пороговое значение временных интервалов, указывающее, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций.
8. Устройство по п. 1,
в котором указанный блок (140) выбора ROI выполнен с возможностью:
выбора областей проекций, имеющих количество изменений направления ниже первого порогового значения областей проекций и/или временных интервалов выше второго порогового значения областей проекций,
выбора среди указанных областей проекций пар областей проекций в обоих профилях проекций, имеющих по существу равное количество изменений направления и/или по существу равные временные интервалы между изменениями направления, причем указанные пары областей проекций образуют отдельные исследуемые области.
9. Устройство по п. 1,
в котором указанный процессор (136) выполнен с возможностью определения информации о дыхании объекта из указанной исследуемой области в указанном поднаборе кадров изображения.
10. Устройство по п. 1,
дополнительно содержащее блок (122) изображения, в частности камеру для удаленного обнаружения электромагнитного излучения, излучаемого или отражаемого от объекта.
11. Устройство по п. 1,
дополнительно содержащее источник излучения, в частности источник света для направления электромагнитного излучения к объекту.
12. Способ получения показателя жизненно важных функций объекта, содержащий этапы, на которых:
принимают набор кадров изображения объекта,
определяют количество изменений направления и/или временные интервалы между изменениями направления в исследуемой области в поднаборе кадров изображения, содержащем несколько кадров изображения указанного набора, причем изменение направления указывает изменение направления движения, появляющееся в указанной исследуемой области,
определяют, содержит ли указанная исследуемая область в указанном поднаборе кадров изображения информацию о показателе жизненно важных функций и/или шум посредством использования определенного количества изменений направления и/или временных интервалов для указанного поднабора кадров изображения,
выбирают исследуемую область в указанном поднаборе кадров изображения посредством:
определения двух профилей проекций в двух заданных ортогональных направлениях из указанного поднабора кадров изображения,
разделения указанных профилей проекций на области проекций, определения количества изменений направления и(или) временных интервалов между изменениями направления в указанных областях проекций,
выбора двух или более смежных областей проекций, имеющих наименьшие количества изменений направления и(или) наибольшие временные интервалы между изменениями направления, причем указанные выбранные области проекций представляют собой исследуемую область,
определяют требуемый показатель жизненно важных функций объекта из указанной исследуемой области в указанном поднаборе кадров изображения, если определено, что указанная исследуемая область в указанном поднаборе кадров изображения содержит информацию о показателе жизненно важных функций.
13. Машиночитаемый носитель, на котором хранится программный код, сконфигурированный для выполнения компьютером этапов способа по п. 12, когда указанный программный код выполняется на компьютере.
| US 20100130873 A1, 27.05.2010 | |||
| WO 2012140531 A1, 18.10.2012 | |||
| КРЕПЛЕНИЕ ПОДУШКИ БЕЗОПАСНОСТИ В МОДУЛЕ ПОДУШКИ БЕЗОПАСНОСТИ | 2008 |
|
RU2417908C1 |
| Цилиндрическая читающая оптическая система | 1950 |
|
SU91838A1 |

