Изобретение относится к области управления движением космических аппаратов (КА) и может быть использовано для предотвращения сближения космического аппарата с активным объектом.
Известно защищенное патентом изобретение - аналог: заявка №4542963/11, МПК B64G 1/24, 1991 год «Система стабилизации космического аппарата» (Гришин В.Н., Дубчак B.C., Климов В.А., Охапкин В.А., Папков О.В.). Система стабилизации КА содержит каналы управления по тангажу и рысканью из последовательно соединенных датчика отклонения углового ускорения и угловой скорости, суммирующего усилителя и рулевой машинки, датчика отклонения линейного ускорения и линейной скорости, двигательной установки, камера сгорания которой установлена с возможностью линейного перемещения вдоль поперечной оси КА. Данная система обеспечивает автономное управление КА безотносительно его движения по сравнению с другими космическими объектами и поэтому является неэффективной для проведения операций орбитального обслуживания.
Известно защищенное патентом изобретение - аналог: заявка №2012125987/11, МПК B64G 1/24, B64G 1/26, 2010 год «Стабилизация движения неустойчивых фрагментов космического мусора» (Поулос Деннис, США). Предложенный способ относится к управлению движением космических объектов и обеспечивает стабилизацию относительного движения фрагментов космического мусора (вокруг собственного центра масс). Способ стабилизации движения указанных фрагментов включает приложение силы к фрагменту в определенных расчетных точках. Силу, воздействующую на фрагмент, создают с использованием пневматического действия газового факела, генерируемого на борту находящегося рядом КА. Газовый факел может создаваться устройствами типа ракетных двигателей разного рода. При этом возможно одновременное изменение орбиты фрагмента космического мусора. К недостаткам способа следует отнести сложность позиционирования ракетных двигателей КА относительно фрагмента космического мусора, а также необходимость компенсации импульса, создаваемого этими ракетными двигателями, для удержания КА в требуемой орбитальной позиции.
Известно защищенное патентом изобретение - аналог: заявка №2012136164/11, МПК B64G 1/64, 2012 год «Способ стыковки космических аппаратов и устройство для его реализации» (Трушляков В.И., Юткин Е.А., Макаров Ю.Н., Олейников И.И., Шатров Я.Т.). Согласно способу выполняют стыковку двух КА, один из которых пассивный (ПКА), а другой, сближающийся с ним - активный (АКА). Способ включает использование самонаводящегося космического микробуксира (КМБ) для доставки троса, выпускаемого с АКА при сближении с ПКА на минимальное расстояние и оснащенного стыковочным штырем. Далее выполняют стягивание ПКА и АКА с помощью троса. Способ отличается тем, что в качестве устройства зацепления на ПКА используют сопло маршевого двигателя, вводят стыковочный штырь в камеру двигателя и при проходе критического сечения двигателя, достигнув передней стенки камеры сгорания, последовательно задействуют устройства фиксации и стягивания, установленные на стыковочном штыре. В процессе стягивания синхронизируют угловые скорости связки (КМБ + ПКА) и АКА, совмещают продольные оси АКА и связки (КМБ + ПКА) с направлением линии, соединяющей их центры масс, осуществляют стабилизацию углового положения, с помощью продольных ускорений, развиваемых двигателями АКА и КМБ, осуществляют снижение натяжения троса до минимального. После касания связки (КМБ + ПКА) с посадочным местом на АКА осуществляют фиксацию связки с помощью системы, установленной на АКА. Недостатком способа является механическое повреждение двигательной установки ПКА устройством фиксации, что исключает возможность дальнейшего использования ПКА при проведении операций орбитального обслуживания.
Известно изобретение - прототип: патент №2619168, МПК B64G 3/00, 2015 год, «Способ определения направления на активный объект, преднамеренно сближающийся с космическим аппаратом» (Яковлев М.В., Яковлева Т.М., Яковлев Д.М.), согласно которому принимают сигналы, излучаемые приближающимся активным объектом, измеряют амплитуду и выполняют обработку принимаемых сигналов. Для приема сигналов применяют детекторы плоской формы. Детекторы располагают на поверхности сферической оболочки ортогонально радиус-вектору из центра сферической оболочки к точке касания с детектором. Внутри сферической оболочки помещают материал - поглотитель излучения. Направление на активный приближающийся объект определяют по радиус-вектору, направленному на детектор с максимальной амплитудой регистрируемого сигнала. Недостатком способа является невозможность его использования для определения времени сближения активного объекта с космическим аппаратом.
Целью предполагаемого изобретения является определение времени до встречи активного объекта с космическим аппаратом при параллельном сближении.
Указанная цель достигается в заявляемом способа определения времени до встречи активного объекта (АО) с космическим аппаратом при параллельном сближении, согласно которому излучаемые приближающимся активным объектом сигналы регистрируют детекторами плоской формы, расположенными на поверхности сферической оболочки. Запоминают принимаемые сигналы и выполняют их обработку, определяют направление на активный объект по радиус-вектору на детектор с максимальной амплитудой сигнала. Направление регистрируют в различные моменты времени и одновременно измеряют мощность принимаемых сигналов, сравнивают зарегистрированные направления на активный объект и при их совпадении определяют время до сближения по интервалу времени между последовательными измерениями и соотношению мощностей сигналов в моменты измерений.
Обоснование реализуемости и практической значимости заявляемого способа заключается в следующем.
Особенность функционирования используемого в заявляемом изобретении метода приема сигналов лазерного излучения, излучаемого приближающимся активным объектом, состоит в том, что детекторы располагают на поверхности сферической оболочки ортогонально радиус-вектору из центра сферической оболочки к точке касания с детектором (патент №2619168). Каждый детектор регистрирует излучение в пределах телесного угла 2%, при этом амплитуда сигнала пропорциональна косинусу угла падения луча на поверхность детектора. Поэтому нормаль к поверхности детектора с максимальной амплитудой сигнала указывает направление на источник излучения. Погрешность измерений определяется величиной телесного угла, равного отношению площади детектора к квадрату радиуса сферической оболочки, на которой он расположен. Таким образом, используемый в заявляемом изобретении метод приема сигналов позволяет определить направление на источник излучения.
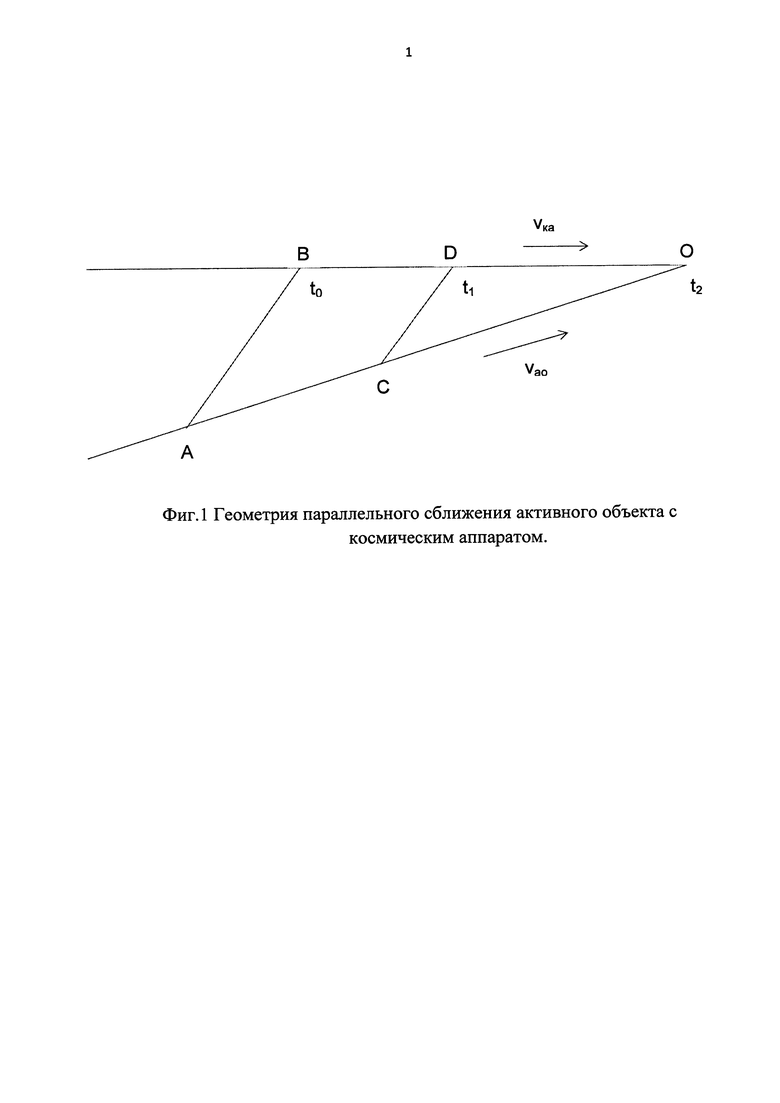
При одинаковом направлении на приближающийся АО по данным двух измерений траектории АО и КА лежат в одной плоскости, как показано на фиг. 1 (режим параллельного сближения: В.А. Вейцель, А.С. Волковский, С.А. Волковский и др. - Радиосистемы управления, под ред. В.А. Вейцеля М. Дрофа, 2005. 450 с.). При постоянной мощности излучения в источнике отношение мощностей принимаемых сигналов в точках D и В обратно пропорционально отношению квадратов расстояний между АО и КА в этих точках (отрезки CD и АВ). Поэтому из подобия треугольников ОАВ и OCD следует, что отношение отрезков ОВ и OD будет пропорционально корню квадратному из отношения мощностей сигналов в точках D и В. Отрезок OD равен разности отрезков ОВ и BD. В таком случае соотношение интервалов времени от первого измерения до встречи активного объекта с космическим аппаратом, Δt=(t2-t0), и между двумя последовательными измерениями мощности сигналов в точках D и В, (t1-t0), определяется по формуле:
 ,
,
где t0, t1 - моменты времени первого и второго измерений; PD, PB - значения мощности измеренных сигналов в моменты времени t1, t0. По мере приближения t1 к t2 выполняется соотношение PD>>PB, и формула преобразуется к виду:
Δt≈(t2-t0).
Практическая значимость предлагаемого способа определения времени до встречи активного объекта с космическим аппаратом при параллельном сближении заключается в том, что информация, полученная о времени до встречи, позволяет реализовать мероприятия, исключающие возможные негативные последствия столкновения.
Таким образом, возможность технической реализации заявляемого способа определения времени до встречи активного объекта с космическим аппаратом при параллельном сближении и его практическая значимость не вызывают сомнений.
Изобретение относится к управлению движением космических аппаратов (КА), в частности для предотвращения сближения КА с активным объектом (АО). Согласно способу излучаемые приближающимся АО сигналы регистрируют на борту КА детекторами плоской формы, расположенными на поверхности сферической оболочки. Эти сигналы запоминают и обрабатывают, определяя текущее направление на АО по радиус-вектору детектора с максимальной амплитудой сигнала. Регистрируют направления на АО в различные моменты времени и одновременно измеряют мощность принимаемых сигналов. Сравнивают зарегистрированные направления на АО и при их совпадении определяют время до встречи по интервалу между последовательными измерениями и соотношению мощностей сигналов в моменты измерений. Техническим результатом является заблаговременное определение момента встречи АО с КА сравнительно простыми средствами. 1 ил.
Способ определения времени до встречи активного объекта с космическим аппаратом при параллельном сближении, согласно которому излучаемые приближающимся активным объектом сигналы регистрируют детекторами плоской формы, расположенными на поверхности сферической оболочки, запоминают принимаемые сигналы и выполняют их обработку, определяют направление на активный объект по радиус-вектору на детектор с максимальной амплитудой сигнала, причем направление регистрируют в различные моменты времени и одновременно измеряют мощность принимаемых сигналов, сравнивают зарегистрированные направления на активный объект и при их совпадении определяют время до сближения по интервалу времени между последовательными измерениями и соотношению мощностей сигналов в моменты измерений.
| Способ определения направления на активный объект, преднамеренно сближающийся с космическим аппаратом | 2015 |
|
RU2619168C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2542820C2 |
| US 20150346355 A1, 03.12.2015 | |||
| US 20110127437 A1, 02.06.2011 | |||
| US 6866232 B1, 15.03.2005. | |||

