ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству обнаружения лампы и способу обнаружения лампы.
УРОВЕНЬ ТЕХНИКИ
[0002] До настоящего времени известно устройство обнаружения светофора, выполненное с возможностью обнаружения светофора из снимка изображения с помощью камеры (см. Патентная Литература 1). В соответствии с Патентной Литературой 1, потенциальная сигнальная лампа обнаруживается из изображения на основании цвета и формы сигнальной лампы, и определяется, мигает или нет потенциальная сигнальная лампа с предварительно определенным циклом.
СПИСОК ЦИТИРОВАНИЯ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003] Патентная Литература 1: Японская публикация патентной заявки № 2005-301518
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004] При перемещении транспортного средства со смонтированной камерой, позиция участка границы, включенного в снимок изображения, во время перемещения и с разностью яркости, равной или превышающей предварительно определенное значение, также перемещается соответствующим образом. Это вызывает ступенчатую реакцию яркости в области, где участок границы перемещается, и генерирует шум с широкими частотными компонентами. Когда пиксели с яркостями, варьирующимися с предварительно определенным циклом, извлекаются в качестве лампы, шум с широким частотным компонентом может быть ошибочно распознан в качестве такой лампы.
[0005] Настоящее изобретение было выполнено, принимая во внимание вышеупомянутую проблему. Цель изобретения состоит в предоставлении устройства обнаружения лампы и способа обнаружения лампы, которые выполнены с возможностью стабильного обнаружения лампы, при этом сдерживая ошибочное обнаружение ступенчатой реакции яркости в качестве лампы даже в случае перемещения участка границы.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006] Устройство обнаружения лампы в соответствии с одним аспектом настоящего изобретения обнаруживает участок границы из изображения камеры, при этом участок границы имеет разность яркости, равную или превышающую предварительно определенное значение, и генерирует сглаженное изображение посредством ослабления разности яркости участка границы. Затем, устройство обнаружения лампы извлекает синхронизированные пиксели из сглаженного изображения, причем синхронизированные пиксели с яркостями, варьирующимися синхронно с циклом переменного тока питания, подаваемого к лампе, и обнаруживает лампу из синхронизированных пикселей.
ПРЕИМУЩЕСТВЕННЫЕ РЕЗУЛЬТАТЫ ИЗОБРЕТЕНИЯ
[0007] Один аспект настоящего изобретения уменьшает градиент яркости, представляющий собой разность яркости между смежными пикселями на участке границы, тем самым уменьшая разность яркости при ступенчатой реакции яркости пикселя, которая характерна позиционному сдвигу участка границы в изображении, и уменьшая интенсивность шума в полосе частот питания. Таким образом, существует возможность стабильного обнаружения лампы, при этом сдерживая ошибочное обнаружение шума, характерного ступенчатой реакции яркости пикселя, в качестве лампы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
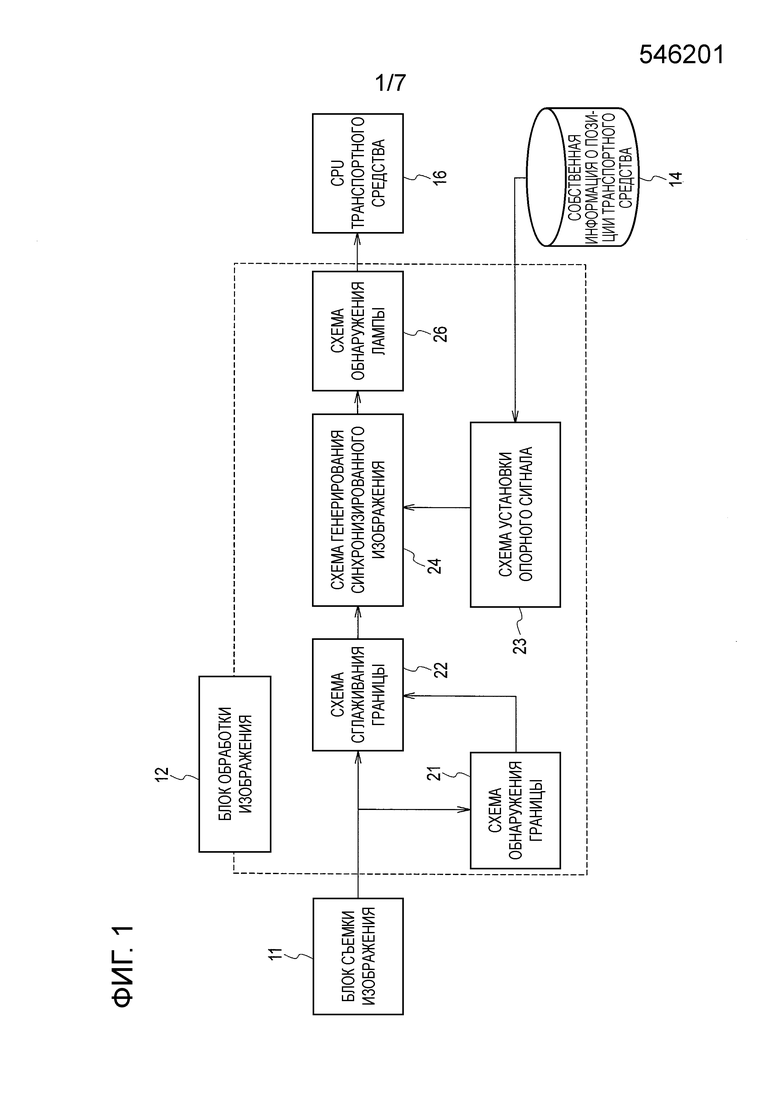
[0008] [Фиг. 1] Фиг. 1 является структурной схемой, показывающей общую конфигурацию устройства обнаружения лампы в соответствии с первым вариантом осуществления.
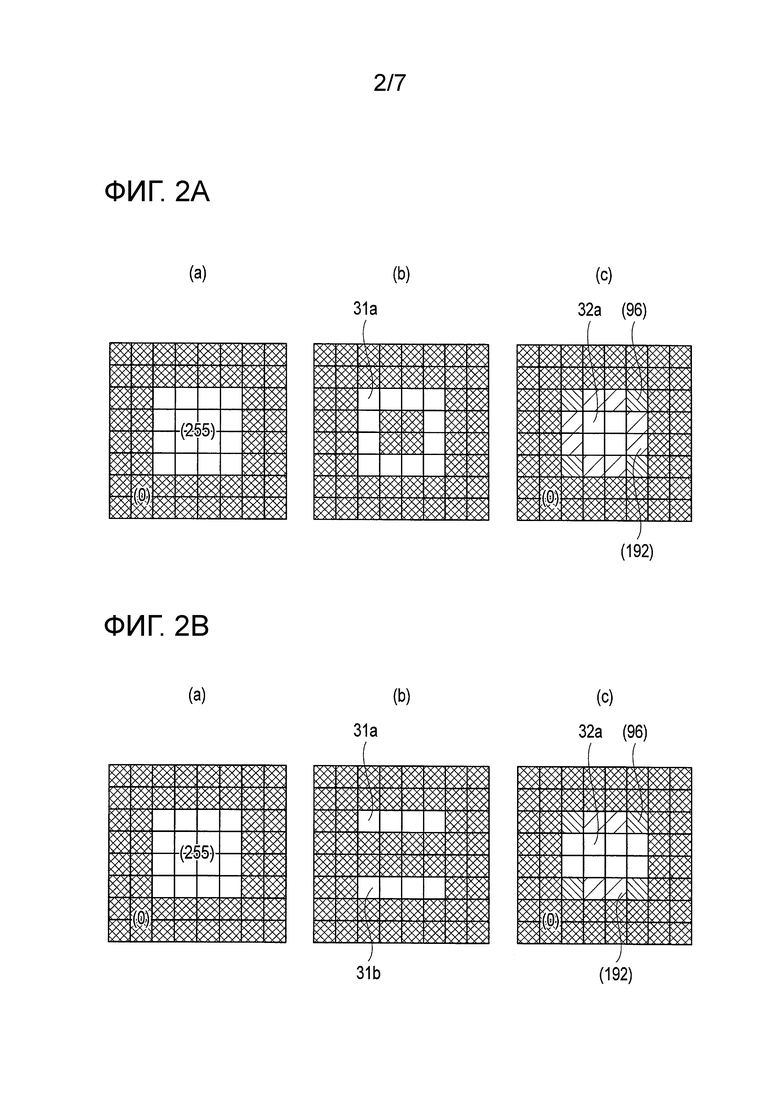
[Фиг. 2A] Фиг. 2A(a) показывает изображение камеры, Фиг. 2A(b) показывает участок границы, обнаруженный из Фиг. 2A(a), и Фиг. 2A(c) показывает сглаженное изображение, сгенерированное посредством регулирования яркости на участке границы Фиг. 2A(b).
[Фиг. 2B] Фиг. 2B(a) показывает изображение камеры, Фиг. 2B(b) показывает суб-участки границы последовательные в горизонтальном направлении, которые обнаруживаются из Фиг. 2B(a), и Фиг. 2B(c) показывает сглаженное изображение, сгенерированное посредством регулирования яркостей на участке границы.
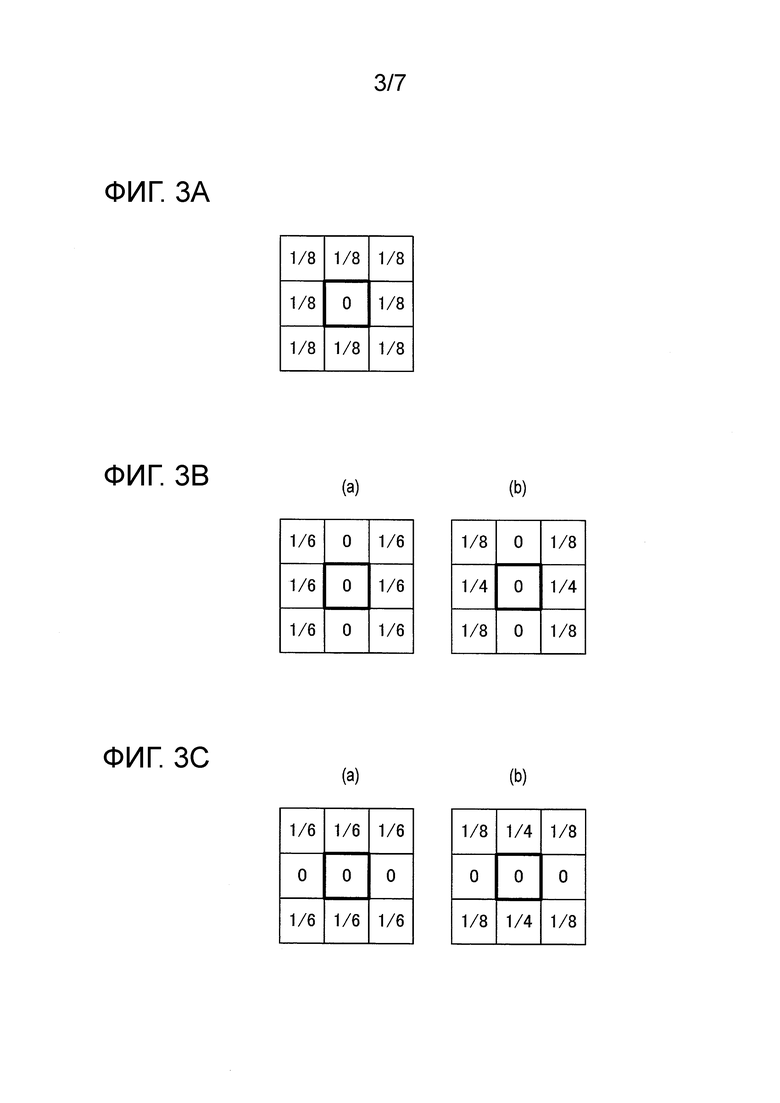
[Фиг. 3A] Фиг. 3A является схемой, показывающей пример обработки сглаживания, чтобы отрегулировать яркость пикселя в центре посредством использования яркостей восьми окружающих пикселей.
[Фиг. 3B] Фиг. 3B(a) и 3B(b) являются схемами, показывающими пример обработки сглаживания, чтобы отрегулировать яркость пикселя в центре посредством использования яркостей шести окружающих пикселей, которая представляет собой обработку сглаживания суб-участок границы, которые проходят в продольном направлении.
[Фиг. 3C] Фиг. 3С(a) и 3C(b) являются схемами, показывающими пример обработки сглаживания, чтобы отрегулировать яркость пикселя в центре посредством использования яркостей шести окружающих пикселей, которая представляет собой обработку сглаживания суб-участков границы, которые проходят в поперечном направлении.
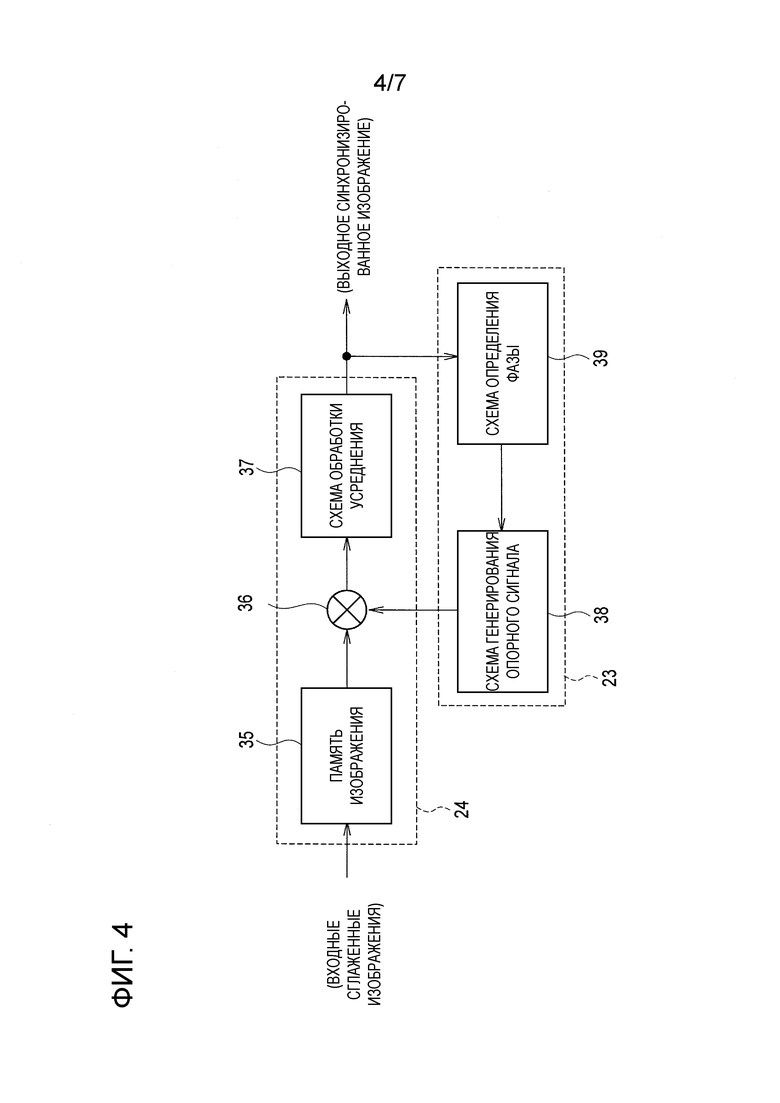
[Фиг. 4] Фиг. 4 является структурной схемой, показывающей подробные конфигурации схемы 24 генерирования синхронизированного изображения и схемы 23 установки опорного сигнала.
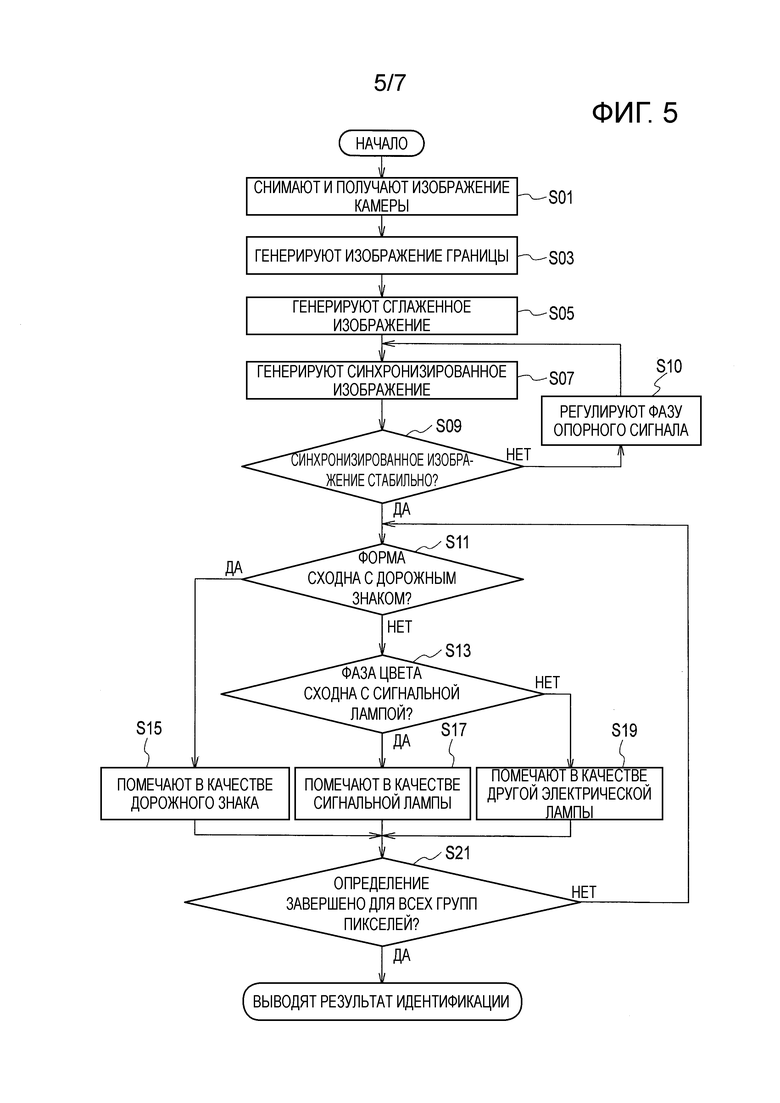
[Фиг. 5] Фиг. 5 является блок-схемой, показывающей пример способа обнаружения лампы, используя устройство обнаружения лампы с Фиг. 1.
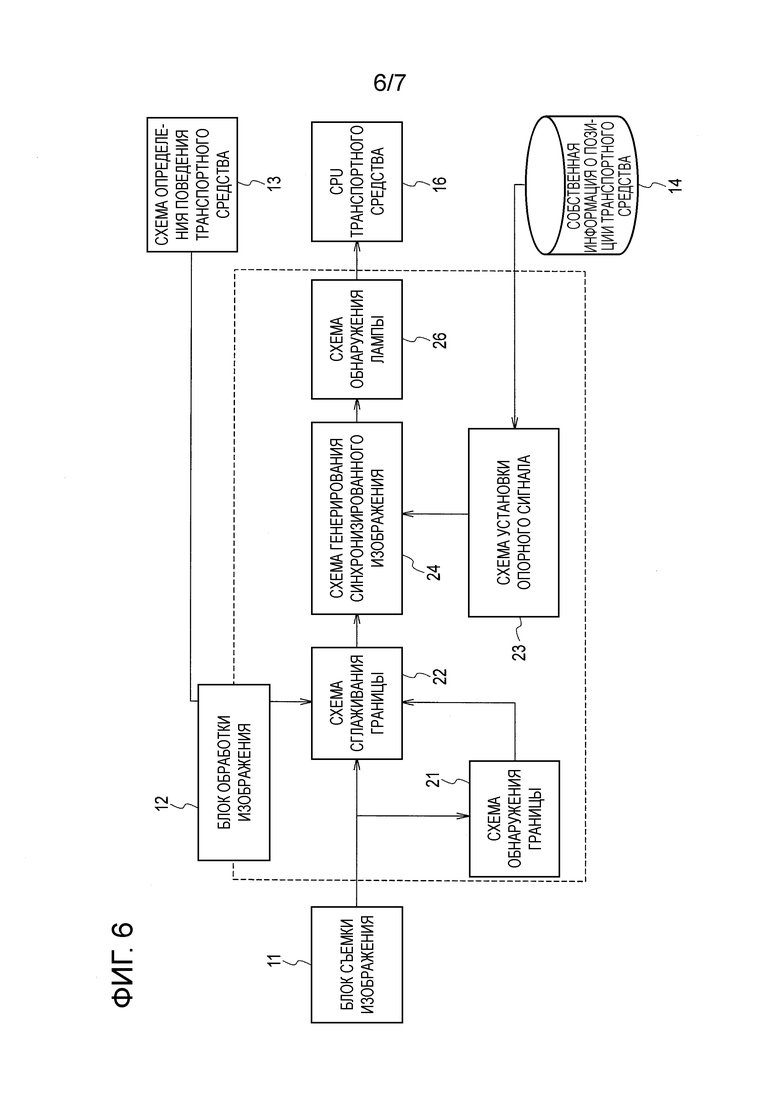
[Фиг. 6] является структурной схемой, показывающей общую конфигурацию устройства обнаружения лампы в соответствии со вторым вариантом осуществления.
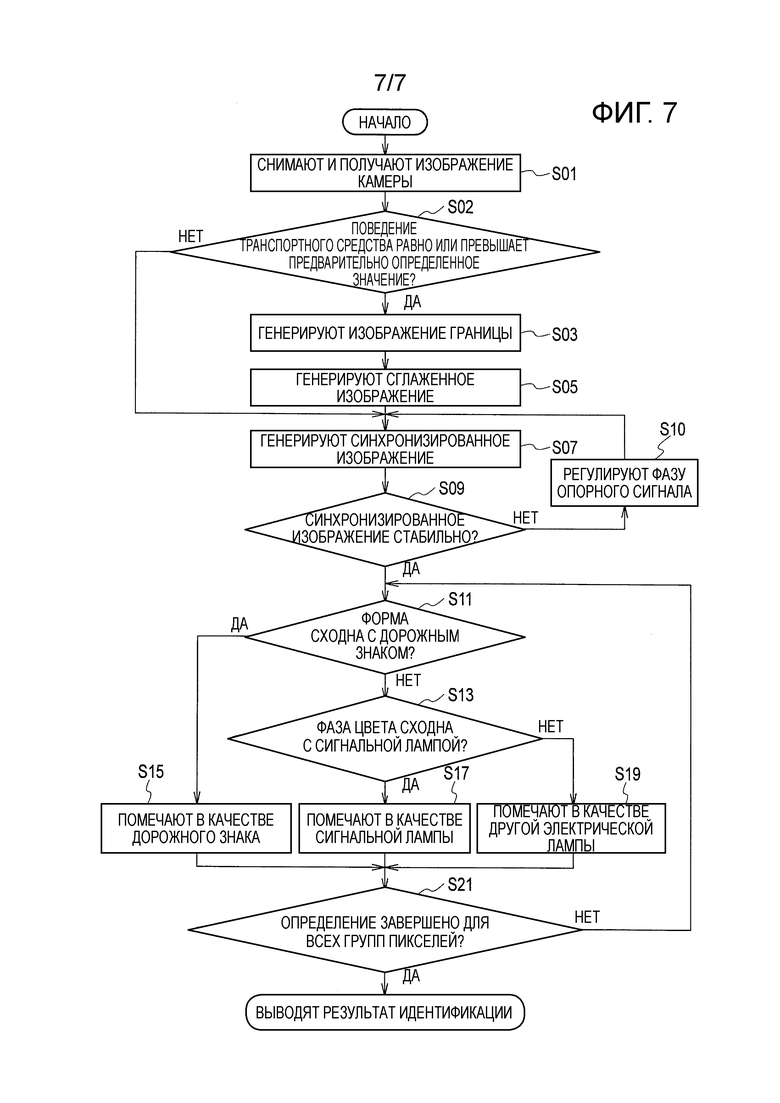
[Фиг. 7] Фиг. 7 является блок-схемой, показывающей пример способа обнаружения лампы, используя устройство обнаружения лампы с Фиг. 6.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0009] [Первый Вариант Осуществления]
Далее, варианты осуществления настоящего изобретения будут описаны подробно со ссылкой на чертежи.
[0010] Общая конфигурация устройства обнаружения лампы в соответствии с первым вариантом осуществления будет описана со ссылкой на Фиг. 1. Устройство обнаружения светофора включает в себя блок 11 съемки изображения, смонтированный на транспортном средстве, и выполненный с возможностью получения изображения камеры посредством съемки изображения вокруг транспортного средства, блок 12 обработки изображения, выполненный с возможностью обнаружения лампы, посредством использования изображения камеры, полученного блоком 11 съемки изображения, и базы данных карты.
[0011] Блок 11 съемки изображения является цифровой камерой, которая включает в себя твердотельные устройства регистрации изображения (датчики изображения), такие как CCD и CMOS, и выполнен с возможностью получения изображения камеры с возможностью обработки изображения. Блок 11 съемки изображения получает последовательные изображения камеры посредством съемки изображений перед транспортным средством, например, неоднократно с заданными интервалами времени. Блок 11 съемки изображения снимает изображения несколько раз в течение одного цикла переменного тока источника питания системы, который должен подаваться к лампе. Блок 11 съемки изображения может захватывать лампу, расположенную перед транспортным средством в каждом изображении камеры. Другими словами, датчики изображения обладают чувствительностью, по меньшей мере, достаточной, чтобы обнаруживать лампу.
[0012] В данном документе, «лампа» является искусственным источником света, который излучает свет наряду с источником питания системы, и включает в себя сигнальную лампу в светофоре, светоизлучающий дорожный знак, и любую другую электрическую лампу (светоизлучающая вывеска, и светоизлучающая часть торгового автомата или подобное).
[0013] Блок 12 обработки изображения принимает данные изображений камеры, полученных блоком 11 съемки изображения, и обнаруживает тип лампы, включенной в изображение камеры. Информация об обнаруженной лампе переадресовывается другому блоку обработки (CPU 16 транспортного средства), смонтированному на транспортном средстве, который включает в себя контроллер для реализации автономного вождения транспортного средства, например. Блок 12 обработки изображения формируется из микроконтроллера, включающего в себя CPU, памяти, и блока ввода-вывода, например, и составляет несколько схем обработки информации, предусмотренных в устройстве обнаружения лампы посредством исполнения компьютерной программы, инсталлированной заранее. Блок 12 обработки изображения исполняет последовательность цикла обработки информации (включая обработку обнаружения границы, обработку сглаживания границы, и обработку синхронизации питания), чтобы обнаруживать неоднократно лампу из изображения камеры, для каждого из последовательных изображений камеры. Блок 12 обработки изображения также служит в качестве ECU, используемого для другого управления, связанного с транспортным средством.
[0014] Несколько схем обработки информации, составленных из блока 12 обработки изображения, включают в себя схему 21 обнаружения границы, схему 22 сглаживания границы, схему 23 установки опорного сигнала, схему 24 генерирования синхронизированного изображения, и схему 26 обнаружения лампы.
[0015] Схема 21 обнаружения границы обнаруживает участок границы из каждого изображения камеры. В данном документе, каждый участок границы обладает разностью яркости между смежными пикселями равной или больше предварительно определенного значения. Например, схема 21 обнаружения границы обнаруживает участок 31a границы, показанный на Фиг. 2A(b), из изображения камеры, показанного на Фиг. 2A(a). Значения (0) и (255) на Фиг. 2A(a) представляют собой значения яркости (в восемь бит), соответственно. Значение (0) представляет собой черный, тогда как значение (255) представляет собой белый. Сетки на Фиг. 2A(a) представляют собой пиксели. Участок, который создает разность яркости между смежными пикселями, по величине равную или превышающую предварительно определенную величину, обнаруживается в качестве участка 31a границы схемой 21 обнаружения границы. Участок на Фиг. 2A(a), где значение (0) яркости граничит со значением (255) яркости обнаруживаются в качестве участка 31a границы. Участок 31a границы, показанный на Фиг. 2A(b), формируется из суммарно шестнадцати последовательных пикселей в форме квадрата, определяемого четырьмя продольными пикселями и четырьмя поперечными пикселями. Когда область высокой яркости участка границы перемещается по изображению камеры, яркость пикселя, в который перемещается участок границы, варьируется образом со ступенчатой реакцией. Как следствие, значение яркости возникает в качестве шума в широкой полосе частот. Если шум возникает в полосе частот цикла переменного тока питания, подаваемого к лампе, шум также извлекается в качестве синхронизированных пикселей, в которых яркость варьируется синхронно. Вследствие этого, предварительно определенное значение, которое служит в качестве предварительно определенной пороговой величины, устанавливается на основании разности яркости участка границы, который создает шум, который склонен к извлечению в качестве синхронизированного пикселя.
[0016] Способ обнаружения границы не ограничивается конкретным способом, и здесь могут быть использованы существующие методики. Например, можно использовать оператор Собеля, оператор Прюитта, и детектор границы Кэнни.
[0017] Схема 22 сглаживания границы генерирует сглаженное изображение посредством ослабления разности яркости участка 31a границы в изображении камеры. Например, схема 22 сглаживания границы генерирует сглаженное изображение, показанное на Фиг. 2A(c) посредством преднамеренного ослабления разности яркости участка 31a границы в изображении камеры, показанном на Фиг. 2A(a). В данный момент, разность яркости преднамеренно ослабляется с тем, чтобы уменьшить градиент яркости, представляющий собой разность яркости между смежными пикселями на участке 31a границы в изображении камеры Фиг. 2A(b). В одном примере, схема 22 сглаживания границы регулирует соответствующие яркости всех шестнадцати пикселей, составляющих участок 31a границы, показанный на Фиг. 2A(b), в соответствии с обработкой сглаживания, показанной ниже. Разность яркости участка 31a границы ослабляется с тем, чтобы исключить возникновение шума, который будет извлекаться в качестве синхронизированного изображения.
[0018] На Фиг. 3A, пиксель в центре, помеченный «0» соответствует пикселю, который составляет участок 31a границы. В соответствии со способом на Фиг. 3A, яркость данного пикселя регулируется до среднего значения яркостей окружающих восьми пикселей. Данная обработка выполняется над каждым из шестнадцати пикселей, составляющих участок 31a границы. Соответственно, как показано на Фиг. 2A(c), яркости восьми пикселей, составляющих четыре стороны участка 31a границы, регулируются до значения (192), тогда как яркости четырех пикселей, составляющих четыре угла участка 31a границы, регулируются до значения (96). Таким образом, разность яркости изображения камеры на Фиг. 2A(a) ослабляется с тем, чтобы уменьшить градиент яркости, представляющий собой разность яркости между смежными пикселями на участке 31a границе, тем самым генерируется сглаженное изображение Фиг. 2A(c). Группа пикселей, определяемая двумя продольными пикселями и двумя поперечными пикселями, которые не подвергаются регулированию яркости, и окруженные восемью пикселями, которые были подвергнуты регулированию яркости, составляют область 32a для обнаружения лампы.
[0019] Между тем, Фиг. 3B(a) и 3B(b) показывают пример, в котором суб-участки границы, которые проходят в продольном направлении, подвергают обработке сглаживания, а Фиг. 3C(a) и 3C(b) показывают пример, в котором суб-участки границы, которые проходят в поперечном направлении, подвергают обработке сглаживания. Другими словами, касательно участка 31a границы на Фиг. 2A(b), суб-участок границы, проходящий в вертикальном направлении, может подвергаться обработке сглаживания образом отличным от обработки сглаживания, которая должна быть выполнена над суб-участком границы, проходящим в горизонтальном направлении. В качестве альтернативы, только один из суб-участка границы, проходящего в горизонтальном направлении, и суб-участка, проходящего в вертикальном направлении, может быть подвергнут обработке сглаживания в зависимости от направления перемещения изображения, как описывается позже.
[0020] Схема 24 генерирования синхронизированного изображения (схема извлечения синхронизированного пикселя) извлекает синхронизированные пиксели из сглаженного изображения, в котором яркости варьируются синхронно с циклом переменного тока питания, подаваемого к лампе, и затем генерирует синхронизированное изображение, составленное из синхронизированных пикселей. Схема 23 установки опорного сигнала устанавливает опорный сигнал, используемый для извлечения синхронизированных пикселей.
[0021] Как показано на Фиг. 4, схема 24 генерирования синхронизированного изображения включает в себя память 35 изображения, схему 36 умножения, и схему 37 обработки усреднения. Схема 23 установки опорного сигнала включает в себя схему 38 генерирования опорного сигнала и схему 39 определения фазы. Сначала, схема 38 генерирования опорного сигнала получает информацию о частоте для источника питания системы (коммерческий источник питания) вокруг транспортного средства, посредством использования собственной информации 14 о позиции транспортного средства, показанной на Фиг. 1, и генерирует опорный сигнал, интенсивность которого варьируется с циклом (100Гц, например) питания переменного тока, полученного посредством того, что источник питания системы подвергается двухполупериодному выпрямлению. Здесь, собственная информация 14 о позиции транспортного средства может быть получена из сигнала позиционирования, такого как сигнал GPS, иди позиционной информации по транспортным ориентирам, захваченным в изображении камеры.
[0022] Схема 36 умножения считывает сглаженное изображение, хранящееся в памяти 35 изображения, и извлекает синхронизированные пиксели посредством умножения сглаженного изображения на опорный сигнал. Схема 36 умножения исполняет описанную выше обработку умножения над каждым из нескольких сглаженных изображений, сохраненных одновременно в памяти 35 изображения. Схема 37 обработки усреднения получает среднее значение результатов умножения соответствующих сглаженных изображений посредством схемы 36 умножения, и выводит среднее значение в качестве синхронизированного изображения, составленного из синхронизированных пикселей.
[0023] В данном документе, схема 39 определения фазы определяет, синхронизирована или нет фаза опорного сигнала с фазой вариации яркости сглаженных изображений, и подает результат определения обратно схеме 38 генерирования опорного сигнала. По приему обратной связи, схема 38 генерирования опорного сигнала регулирует фазу опорного сигнала таким образом, чтобы синхронизировать фазу опорного сигнала с вариацией яркости сглаженных изображений. В частности, фаза опорного сигнала регулируется таким образом, что результат умножения посредством схемы 36 умножения, т.е., яркость каждого синхронизированного пикселя, принимает наибольшее значение. Данное управление обратной связи позволяет увеличить яркость синхронизированного изображения.
[0024] Питание, подаваемое к лампе, является питанием переменного тока, полученным посредством того, что питание коммерческого источника питания подвергается двухполупериодному выпрямлению. Яркость лампы, зажигаемой посредством приема питания, подаваемого от коммерческого источника питания, варьируется в цикле, который точно такой же как цикл (такой как 100Гц) питания переменного тока после двухполупериодного выпрямления. Синхронизированные пиксели, яркости которых варьируются синхронно с циклом переменного тока питания, подаваемого к лампе, могут быть извлечены из сглаженных изображений.
[0025] В данном варианте осуществления, разность яркости участка границы ослабляется с тем, чтобы уменьшить градиент яркости, представляющий собой разность яркости между смежными пикселями на участке границы, и впоследствии извлекаются синхронизированные пиксели, яркости которых варьируются синхронно с циклом переменного тока питания. Таким образом, пространственная частота будет смешиваться с меньшей вероятностью в случае обнаружения синхронизации временной частоты, даже в ситуации особого перемещения области высокой яркости, и можно уменьшить шум, включенный в синхронизированное изображение.
[0026] Схема 26 обнаружения лампы обнаруживает позицию лампы в синхронизированном изображении посредством обнаружения синхронизированных пикселей в синхронизированном изображении с более высокими яркостями, чем предварительно определенная пороговая величина яркости, в качестве лампы. Затем, тип лампы обнаруживается посредством использования, по меньшей мере, одного из синхронизированного изображения, изображений гарнцы, и изображений камеры. Например, схема 26 обнаружения лампы использует сопоставление шаблона, чтобы определять, является или нет форма лампы сходной с той, что у светоизлучающего дорожного знака. Затем, схема 26 обнаружения лампы определяет, является или нет фаза цвета в позиции в изображении камеры, соответствующей позиции лампы, сходной с цветом лампы в светофоре. Эти функции определения позволяют определять, является ли лампа сигнальной лампой в светофоре, светоизлучающим знаком, или любой другой электрической лампой.
[0027] Пример способа обнаружения лампы, используя устройство обнаружения лампы с Фиг. 1, будет описан со ссылкой на блок-схему Фиг. 5.
[0028] Сначала, на этапе S01, блок 11 съемки изображения получает последовательно изображения камеры. Полученные таким образом несколько изображений камеры сохраняются в памяти. Обработка переходит к этапу S03 после получения шести изображений камеры, например, в течение одного цикла переменного тока источника питания системы. Схема 21 обнаружения границы обнаруживает участок 31a границы (Фиг. 2A(b)) с разностью яркости, равной или превышающей предварительно определенное значение, из изображения камеры (Фиг. 2A(a)) посредством использования оператора Собеля или оператор Прюитта, например.
[0029] Далее, обработка переходит к этапу S05. Как описано со ссылкой на Фиг. 2A и с 3A по 3C, схема 22 сглаживания границы генерирует сглаженное изображение (Фиг. 2A(c)) посредством ослабления разности яркости в изображении камеры с тем, чтобы уменьшить градиент яркости, представляющий собой разность яркости между смежными пикселями на участке 31a границы.
[0030] Обработка переходит к этапу S07, где схема 24 генерирования синхронизированного изображения извлекает синхронизированные пиксели, в которых яркости варьируются синхронно с циклом переменного тока питания, подаваемого к лампе, из сглаженных изображений, и затем генерирует синхронизированное изображение, составленное из синхронизированных пикселей. Обработка переходит к этапу S09, где схема 39 определения фазы определяет, синхронизирована или нет фаза опорного сигнала с вариацией яркости сглаженных изображений, посредством обращения к синхронизированному изображению. Например, когда среднее значение яркости всего синхронизированного изображения ниже предварительно определенного значения, схема 39 определения фазы определяет, что синхронизация отсутствует (НЕТ на этапе S09), и подает результат определения назад схеме 38 генерирования опорного сигнала. По приему обратной связи, схема 38 генерирования опорного сигнала регулирует фазу опорного сигнала таким образом, чтобы синхронизировать фазу опорного сигнала с вариацией яркости сглаженных изображения (этап S10).
[0031] В случае определения, что синхронизация присутствует (ДА на этапе S09), обработка переходит к этапу S11, где схема 26 обнаружения лампы обнаруживает позицию лампы в синхронизированном изображении посредством определения кластера из синхронизированных пикселей (группа пикселей) в синхронизированном изображении, который имеет более высокие яркости, чем предварительно определенная пороговая величина яркости, в качестве лампы. Схема 26 обнаружения лампы использует сопоставление шаблона, чтобы определять является или нет форма лампы (группа пикселей) сходной с той, что у светоизлучающего дорожного знака. Когда форма является сходной с той, что у светоизлучающего дорожного знака (ДА на этапе S11), схема 26 обнаружения лампы помечает лампу (группу пикселей) в качестве светоизлучающего дорожного знака (этап S15), и обработка переходит к этапу S21.
[0032] Когда форма не является сходной с той, что у светоизлучающего дорожного знака (НЕТ на этапе S11), схема 26 обнаружения лампы определяет, является или нет фаза цвета в позиции в изображении камеры, соответствующей позиции лампы, сходной с цветом лампы светофора (этап S13). Когда фаза цвета является сходной с цветом лампы светофора (ДА на этапе S13), схема 26 обнаружения лампы помечает лампу (группу пикселей) в качестве сигнальной лампы светофора (этап S17), и обработка переходит к этапу S21. Когда фаза цвета не является сходной с цветом лампы светофора (НЕТ на этапе S13), схема 26 обнаружения лампы помечает лампу (группу пикселей) в качестве другой электрической лампы (этап S19), и обработка переходит к этапу S21.
[0033] Когда определение типа всех групп пикселей в синхронизированном изображении, каждая из которых определяется в качестве лампы, еще не завершено (НЕТ на этапе S21), обработка возвращается к этапу S11 и определение типа выполняется над группой пикселей (лампой), которая еще не подвергалась определению. После того, как определение типа всех групп пикселей (ламп) завешено (ДА на этапе S21), устройство обнаружения лампы переадресовывает информацию по обнаруженным лампам CPU 16 транспортного средства.
[0034] Как описано выше, следующая работа и результаты получаются в соответствии с первым вариантом осуществления.
В первом варианте осуществления, разность яркости участка границы преднамеренно ослабляется (S05) с тем, чтобы уменьшить градиент яркости, представляющий собой разность яркости между смежными пикселями на участке границы, и затем извлекаются синхронизированные пиксели, в которых яркости варьируются синхронно с циклом переменного тока питания (S07). Градиент яркости, представляющий собой разность яркости между смежными пикселями на участке границы, таким образом сглаживается. Когда область высокой яркости участка границы перемещается по изображению камеры, яркость пикселя, в который перемещается участок границы, варьируется образом со ступенчатой реакцией. Как следствие, значение яркости возникает в качестве шума в широкой полосе частот. Величина шума растет больше по мере того, как становится больше вариация яркости из-за перемещения или по мере того, как становится быстрее скорость перемещения. Если шум возникает в полосе частот цикла переменного тока питания, подаваемого к лампе, шум также извлекается в качестве синхронизированных пикселей, в которых яркость варьируется синхронно. Соответственно, ослабление разности яркости участка границы с тем, чтобы уменьшить градиент, представляющий собой разность яркости между смежными пикселями на участке границы, уменьшает шанс ошибочного обнаружения шума в качестве синхронизированного пикселя, который характерен ступенчатой реакции яркости пикселя в отношении перемещения участка границы в позицию изображения. Таким образом, шум, включенный в синхронизированное изображение, уменьшается так, что лампа может быть стабильно обнаружена.
[0035] [Модифицированные Примеры]
Касательно участка границы, который должен быть подвержен обнаружению границы и обработке сглаживания, первый вариант осуществления (Фиг. 2A) не ограничивает его направление продления (горизонтальное или вертикальное). В фактической среде передвижения, где передвигается транспортное средство, кузов транспортного средства трясется вверх и вниз. Соответственно, величина перемещения суб-участка границы в вертикальном направлении становится больше, чем то, что в горизонтальном направлении. В связи с этим, из нескольких суб-участков границы, только суб-участки границы, которые являются последовательными в горизонтальном направлении, могут быть подвергнуты ослаблению разности яркости для того, чтобы эффективно удалять шум, при этом уменьшая нагрузку от обработки изображения.
[0036] Например, схема 22 сглаживания границы на Фиг. 1 может ослаблять разность яркости только суб-участков 31a границы, которые являются последовательными в горизонтальном направлении из участка 31a границы, обнаруженного схемой 21 обнаружения границы и показанного на Фиг. 2A(b), таким образом, чтобы уменьшать градиент яркости, представляющий собой разность яркости между смежными пикселями. Можно выполнять обработку сглаживания только суб-участков 31a границы у участка 31a границы, которые являются последовательными в горизонтальном направлении, например, посредством использования матриц на Фиг. 3C. Это позволяет генерировать сглаженное изображение, как показано на Фиг. 2B(c).
[0037] В качестве альтернативы, схема 21 обнаружения границы на Фиг. 1 может обнаруживать только суб-участки 31b границы, которые являются последовательными в горизонтальном направлении, из изображения камеры на Фиг. 2B(a). В данном случае, схема 22 сглаживания границы может выполнять обработку сглаживания по всем суб-участкам 31b границы, обнаруженным схемой 21 обнаружения границы. Может быть сгенерировано сглаженное изображение, как показано на Фиг. 2B(c). На Фиг. 2B(c), группа пикселей, определенная двумя продольными пикселями и четырьмя поперечными пикселями, которые не подвергаются регулированию яркости, составляют область 32b для обнаружения лампы. Область 32b обнаружения на Фиг. 2B(c) шире, чем область 32a обнаружения на Фиг. 2A(c), полученная посредством сглаживания двух границ в горизонтальном направлении и двух границ в вертикальном направлении, так как суб-участки границы, проходящие в вертикальном направлении не сглаживаются и остаются неизмененными от изображения камеры.
[0038] Градиент яркости, представляющий собой разность яркости между смежными пикселями на суб-участках границы из участка границы, которые являются последовательными в горизонтальном направлении, уменьшается. Таким образом, суб-участки границы последовательные в вертикальном направлении сохраняют от сглаживания, и они, следовательно, могут оставаться в качестве области для обнаружения лампы. Соответственно, лампа, которая является низкой по яркости и находится далеко от транспортного средства, может быть обнаружена с высокой чувствительностью при этом эффективно уменьшая шум на участке границы. Тем временем, нагрузка от обработки изображения касательно обнаружения границы или сглаживания границы также уменьшается.
[0039] [Второй Вариант Осуществления]
По мере того, как увеличивается скорость позиционного сдвига участка границы в изображении камеры, шум более вероятно возникает в области, в которую сдвигается участок границы. Шум менее вероятно возникает, когда позиционный сдвиг участка границы в изображении камеры имеет низкую скорость. В данном случае, предпочтительным является гарантировать широкую область обнаружения, при этом оставляя участок границы нетронутым без сглаживания. Второй вариант осуществления будет описывать устройство обнаружения лампы и способ обнаружения лампы, которые разработаны, чтобы определять необходимость уменьшения шума в зависимости от скорости вариации участка границы в изображении камеры.
[0040] Как показано на Фиг. 6, устройство обнаружения лампы в соответствии со вторым вариантом осуществления отличается от Фиг. 1 тем, что устройство дополнительно включает в себя схему 13 определения поведения транспортного средства. Как и с блоком 12 обработки изображения, схема 13 определения поведения транспортного средства формируется из микроконтроллера, например, который составляет схему 13 определения поведения транспортного средства посредством исполнения компьютерной программы, инсталлированной заранее.
[0041] Схема 13 определения поведения транспортного средства определяет, является или нет скорость позиционного сдвига участка границы на изображении камеры равной или превышающей опорное значение. Опорное значение является значением, которое служит в качестве опорного для определения необходимости в том, чтобы подвергать участок границы обработке сглаживания, и это является предварительно определенным значением. Схема 13 определения поведения транспортного средства может оценивать скорость позиционного сдвига участка границы в изображении камеры на основании информации об угловом колебании кузова в продольном направлении и информации о ходе подвески транспортного средства, полученной от электронного управления стабильностью (ESC) через связь CAN.
[0042] Фиг. 7 показывает пример способа обнаружения лампы, используя устройство обнаружения лампы с Фиг. 6. Когда скорость позиционного сдвига участка границы на изображении камеры равна или превышает опорное значение (ДА на этапе S02), этап (S03) обнаружения границы и этап (S05) сглаживания проводятся образом сходным с тем, что в первом варианте осуществления. С другой стороны, когда скорость позиционного сдвига участка границы ниже опорного значения (НЕТ на этапе S02), схема 24 генерирования синхронизированного изображения может генерировать синхронизированное изображение непосредственно из изображения камеры (этап S07) без проведения обнаружения границы или сглаживания. Оставшиеся процедуры являются точно такими же как те, что на Фиг. 5.
[0043] Шум более вероятно возникает, когда скорость позиционного сдвига участка границы в изображении камеры растет больше. Вследствие этого, когда скорость позиционного сдвига участка границы на изображении камеры равна или превышает опорное значение, синхронизированные пиксели извлекаются из сглаженного изображения для того, чтобы уменьшить возникновение шума. С другой стороны, шум не возникает слишком сильно, когда скорость падает ниже опорного значения. Следовательно, синхронизированные пиксели извлекаются из изображения камеры. Как описано выше, необходимость уменьшения шума определяется в зависимости от скорости позиционного сдвига участка границы в изображении камеры. Следовательно, можно уменьшить нагрузку обработки изображения из изображения камеры до сглаженного изображения, и эффективно уменьшать шум, характерный участку границы.
[0044] Несмотря на то, что настоящее изобретение было описано выше со ссылкой на варианты осуществления, не следует понимать, что утверждения и чертежи, составляющие часть данного раскрытия, предназначены для того, чтобы ограничивать настоящее изобретение. Разнообразные альтернативные варианты осуществления, примеры, и методики работы будут очевидны специалисту в соответствующей области техники из данного раскрытия.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
[0045]
11 блок съемки изображения
13 схема определения поведения транспортного средства
21 схема обнаружения границы
22 схема сглаживания границы
23 схема установки опорного сигнала
24 схема генерирования синхронизированного изображения (схема извлечения синхронизированного пикселя)
26 схема обнаружения лампы
31a, 31b участок границы
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СВЕТОФОРОВ И СПОСОБ ОБНАРУЖЕНИЯ СВЕТОФОРОВ | 2014 |
|
RU2628639C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СВЕТОФОРОВ И СПОСОБ ОБНАРУЖЕНИЯ СВЕТОФОРОВ | 2014 |
|
RU2628023C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СВЕТОФОРОВ И СПОСОБ ОБНАРУЖЕНИЯ СВЕТОФОРОВ | 2014 |
|
RU2643861C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СВЕТОФОРА И СПОСОБ ОБНАРУЖЕНИЯ СВЕТОФОРА | 2015 |
|
RU2655256C1 |
| СПОСОБ УЛУЧШЕНИЯ КАРТЫ ДИСПАРАНТНОСТИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2008 |
|
RU2382406C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПРОТЯЖЕННЫХ КОНТУРОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2016 |
|
RU2628172C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ КАРТЫ ГЛУБИНЫ СЦЕНЫ | 2014 |
|
RU2580466C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ТЕЛ И СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ТЕЛ | 2012 |
|
RU2568777C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ СУЧКА В ДРЕВЕСИНЕ | 2006 |
|
RU2381442C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2598899C1 |
Группа изобретений относится к области обнаружения лампы светофора. Обнаружение лампы светофора осуществляется по способу устройством, которое обнаруживает участок границы из изображения камеры, который имеет разность яркости, равную или превышающую предварительно определенное значение, и генерирует сглаженное изображение посредством ослабления разности яркости участка границы. Затем устройство обнаружения лампы светофора извлекает синхронизированные пиксели из сглаженного изображения, при этом синхронизированные пиксели имеют яркости, варьирующиеся синхронно с циклом переменного тока питания, подаваемого к лампе, и обнаруживает лампу из синхронизированных пикселей. Обеспечивается повышение эффективности обнаружения лампы светофора. 2 н. и 2 з.п. ф-лы. 7 ил.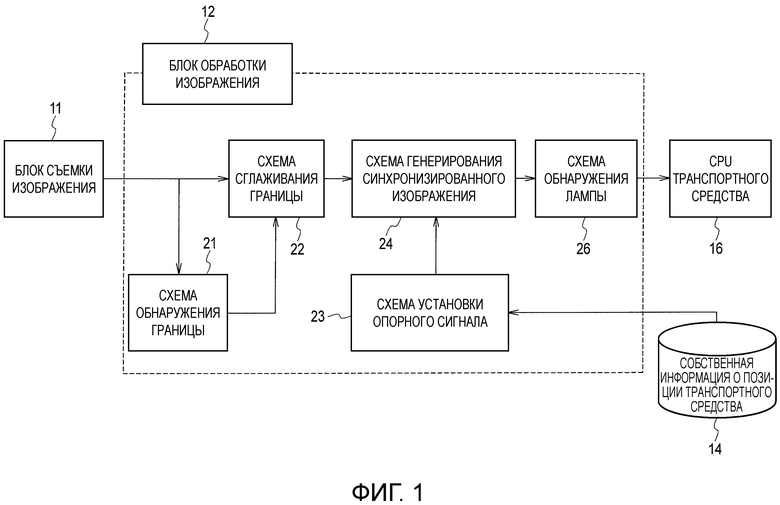
1. Устройство обнаружения лампы, содержащее:
блок съемки изображения, смонтированный на транспортном средстве и выполненный с возможностью получения изображения камеры посредством съемки изображения вокруг транспортного средства;
схему обнаружения границы, выполненную с возможностью обнаружения участка границы из изображения камеры, причем участок границы имеет разность яркости, равную или превышающую предварительно определенное значение;
схему сглаживания границы, выполненную с возможностью генерирования сглаженного изображения посредством ослабления разности яркости между смежными пикселями на участке границы;
схему извлечения синхронизированного пикселя, выполненную с возможностью извлечения синхронизированных пикселей из сглаженного изображения, при этом синхронизированные пиксели имеют яркости, варьирующиеся синхронно с циклом переменного тока питания, подаваемого к лампе; и
схему обнаружения лампы, выполненную с возможностью обнаружения лампы из синхронизированных пикселей.
2. Устройство обнаружения лампы по п. 1, в котором схема сглаживания границы ослабляет разность яркости только субучастков границы на участке границы, которые являются последовательными в горизонтальном направлении.
3. Устройство обнаружения лампы по п. 1 или 2, дополнительно содержащее:
схему определения поведения транспортного средства, выполненную с возможностью определения, является или нет скорость позиционного сдвига участка границы на изображении камеры равной или превышающей опорную величину, при этом
схема извлечения синхронизированного пикселя извлекает синхронизированные пиксели с яркостями, варьирующимися синхронно с циклом переменного тока питания, подаваемого лампе, из сглаженного изображения, когда скорость позиционного сдвига участка границы равна или превышает опорное значение, и
схема извлечения синхронизированного пикселя извлекает синхронизированные пиксели с яркостями, варьирующимися синхронно с циклом переменного тока питания, подаваемого лампе, из изображения камеры, когда скорость позиционного сдвига участка границы ниже опорного значения.
4. Способ обнаружения лампы, содержащий этапы, на которых:
получают изображение камеры посредством съемки изображения вокруг транспортного средства, при этом используя блок съемки изображения, смонтированный на транспортном средстве;
обнаруживают участок границы из изображения камеры, причем участок границы имеет разность яркости, равную или превышающую предварительно определенное значение;
генерируют сглаженное изображение посредством ослабления разности яркости между смежными пикселями на участке границы;
извлекают синхронизированные пиксели из сглаженного изображения, при этом синхронизированные пиксели имеют яркости, варьирующиеся синхронно с циклом переменного тока питания, подаваемого к лампе; и
обнаруживают лампу из синхронизированных пикселей.
| US 20080278577 A1, 13.11.2008 | |||
| US 6611610 B1, 26.08.2003 | |||
| CN 103345766 A, 09.10.2013 | |||
| Вакуум-присос для подъема грузов | 1958 |
|
SU116258A1 |

