Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для съемки изображений и способу управления устройством для съемки изображений, и, в частности, относится к техническим приемам автоматического обнаружения фокуса.
Предшествующий уровень техники
В качестве систем для автоматического обнаружения фокуса (автоматической фокусировки (AF)) устройства для съемки изображений известны система контрастной AF и система фазоразностной AF. Обе эти системы часто используются в видеокамерах и цифровых фотокамерах, а в некоторых из этих систем AF в качестве датчика для обнаружения фокуса используется датчик изображения.
В этих системах AF обнаружение фокуса выполняется с использованием оптического изображения, и соответственно имеют место случаи, когда аберрация оптической системы, формирующей оптическое изображение, приводит к появлению ошибки в результате обнаружения фокуса. Был предложен способ уменьшения ошибки подобного типа.
В патентном документе 1 (патент Японии №5087077) раскрыт способ, в котором предварительно готовятся эталонные корректирующие данные, определяющие комбинацию из множества репрезентативных значений для AF кадра, фокусного расстояния, оценочной частоты AF и расстояния до объекта, и выполняется коррекция результата обнаружения фокуса с использованием корректирующих данных, полученных посредством выполнения интерполяции согласно реальному состоянию.
Однако в случае со способом, предложенным в патентном документе 1, где используется корректирующее значение, подходящее для оценочной частоты AF, уникальной для корпуса камеры, с целью коррекции результата обнаружения фокуса, возникает проблема, состоящая в том, что ошибка в определении фокуса не может быть в достаточной степени скорректирована. Изначально ошибка обнаружения фокуса представляет собой разность между состоянием фокуса, при котором наблюдатель чувствует максимальный комфорт в отношении снятого изображения, и состоянием фокуса, указанным по упомянутому результату обнаружения фокуса. Однако, в способе, описанном в патентном документе 1, состояние фокуса для снятого изображения не учитывается.
Также оценочная частота AF в патентном документе 1 представляет пространственные частотных характеристики одной частоты. Однако полоса, которая в действительности оценивается при определении фокуса, имеет некоторую ширину и не представляет характеристики только одной частоты.
Сущность изобретения
Целью настоящего изобретения является решение одной или нескольких из вышеупомянутых проблем, присущих известным техническим приемам. В частности, целью настоящего изобретения является обеспечение устройства для съемки изображений и способа управления устройством для съемки изображений, при использовании которых можно точно скорректировать ошибку обнаружения фокуса, вызванную аберрацией оптической системы, посредством коррекции результата обнаружения фокуса с учетом по меньшей мере состояния фокуса для снятого изображения.
Согласно одному аспекту настоящего изобретения обеспечено устройство для съемки изображений, способное выполнять автоматическое обнаружение фокуса оптической системы формирования изображения с использованием сигнала, полученного от датчика изображения, причем устройство содержит: средство сбора для получения (1) первой информации о позициях формирования изображения, полученной путем выполнения, с использованием множества первых весов, суммирования со взвешиванием информации, касающейся множества позиций формирования изображения оптической системы формирования изображения, где указанная информация соответствует разным пространственным частотам, и (2) второй информации о позициях формирования изображения, полученной путем выполнения, с использованием множества вторых весов, суммирования со взвешиванием для указанной информации; корректирующее средство для коррекции результата автоматического обнаружения фокуса на основе результата сравнения первой информации о позициях формирования изображения и второй информации о позициях формирования изображения; и средство управления для управления позицией фокусирующей линзы, которая имеется в оптической системе формирования изображения, на основе скорректированного результата автоматического обнаружения фокуса, где множество первых весов соответствует первой оцененной полосе во время оценки изображения, на основе сигнала, полученного от датчика изображения, а множество вторых весов соответствует второй оцененной полосе сигнала, полученного от датчика изображения, причем при автоматическом определении фокуса используется вторая оцененная полоса.
Согласно еще одному аспекту настоящего изобретения обеспечен способ управления устройством для съемки изображений, способным выполнять автоматическое обнаружение фокуса оптической системы формирования изображения с использованием сигнала, полученного от датчика изображения, причем способ содержит: шаг получения (1) первой информации о позициях формирования изображения, полученной путем выполнения, с использованием множества первых весов, суммирования со взвешиванием информации, касающейся множества позиций формирования изображения оптической системы формирования изображения, где указанная информация соответствует разным пространственным частотам и (2) информации о второй позиции формирования изображения, полученной путем выполнения, с использованием множества вторых весов, суммирования со взвешиванием для указанной информации; шаг коррекции результата автоматического обнаружения фокуса на основе результата сравнения первой информации о позициях формирования изображения и второй информации о позициях формирования изображения; и шаг управления для управления позицией фокусирующей линзы, которая имеется в оптической системе формирования изображения, на основе скорректированного результата автоматического обнаружения фокуса, где множество первых весов соответствует первой оцененной полосе во время оценки изображения, на основе сигнала, полученного от датчика изображения, а множество вторых весов соответствует второй оцененной полосе сигнала, полученного от датчика изображения, причем при автоматическом определении фокуса используется вторая оцененная полоса.
Дополнительные признаки настоящего изобретения станут очевидными из последующего описания примерных вариантов его осуществления со ссылками на прилагаемые чертежи.
Краткое описание чертежей
фиг. 1А - блок-схема, показывающая операцию AF в одном варианте осуществления изобретения;
фиг. 1В - блок-схема, показывающая операцию AF в одном варианте осуществления изобретения;
фиг. 2 - блок-схема цифровой камеры, служащей в качестве примера устройства для съемки изображений согласно одному варианту осуществления;
фигуры 3А и 3В - схемы, показывающие примерную конфигурацию датчика изображения в одном варианте осуществления;
фигуры 4А и 4В - схемы, иллюстрирующие взаимосвязь между областью фотоэлектрического преобразования и выходным зрачком в одном варианте осуществления;
фиг. 5 - блок-схема блока 130 TVAF по фиг. 2;
фиг. 6 - схема, показывающая примерные области обнаружения фокуса в одном варианте осуществления;
фиг. 7 - блок-схема процесса вычисления BP корректирующего значения (BP1) по вертикали/горизонтали в одном варианте осуществления;
фигуры 8А и 8В - схемы, иллюстрирующие процесс вычисления BP корректирующего значения по вертикали/горизонтали в одном варианте осуществления;
фигуры 9А-9С - схемы, иллюстрирующие процесс вычисления BP корректирующего значения (BP2) по вертикали/горизонтали в одном варианте осуществления;
фигуры 10А-10С - схемы, иллюстрирующие процесс вычисления ВР корректирующего значения (ВР3) пространственной частоты в первом варианте осуществления;
фигуры 11А-11F - графики, иллюстрирующие различные пространственные частотные характеристики в одном варианте осуществления;
фиг. 12 - график, иллюстрирующий процесс вычисления ВР корректирующего значения (ВР3) пространственных частот во втором варианте осуществления;
фиг. 13 - блок-схема, иллюстрирующая процесс вычисления ВР корректирующего значения (ВР3) пространственной частоты в третьем варианте осуществления.
Описание вариантов осуществления изобретения
Далее со ссылками на сопроводительные чертежи описываются примерные варианты осуществления настоящего изобретения. Заметим, что, хотя эти варианты осуществления имеют конкретные конфигурации с целью облегчения понимания и описания настоящего изобретения, изобретение не ограничено этими конкретными конфигурациями. Например, хотя ниже приведено описание вариантов осуществления, в которых настоящее изобретение применено к зеркальной цифровой камере с одним сменным объективом, изобретение также применимо к цифровой камере, чей объектив не является сменным, а также к видеокамере. Настоящее изобретение также можно реализовать в любом электронном устройстве, имеющем камеру, например, в мобильном телефоне, персональном компьютере типа лэптоп, планшетном компьютере, настольном персональном компьютере и т.д., игровом автомате и т.п.
Первый вариант осуществления изобретения
Описание конфигурации устройства для съемки изображения - блока объектива
На фиг. 2 представлена блок-схема, иллюстрирующая примерную функциональную конфигурацию цифровой камеры в качестве примера устройства для съемки изображений согласно одному варианту осуществления. В настоящем варианте осуществления цифровая камера представляет собой зеркальную камеру с одним сменным объективом, которая содержит блок 100 объектива и корпус 120 камеры. Блок 100 объектива вмонтирован в корпус 120 камеры через держатель M, обозначенный пунктирной линией в центре фиг. 2.
Блок 100 объектива содержит оптическую систему (первая группа 101 линз, диафрагма 102, вторая группа 103 линз и группа (104) фокусирующих линз (называемая далее просто «фокусирующей линзой»), а также систему привода/управления. Таким образом, блок 100 объектива является объективом, формирующим изображение, который включает в себя фокусирующую линзу 104 и формирует оптическое изображение объекта.
Первая группа 101 линз скомпонована на конце блока 100 объектива и закреплена таким образом, что имеет возможность перемещения в направлении OA оптической оси. Диафрагма 102 предназначена для регулировки количества света во время формирования изображения, а также выполняет функцию механического затвора для управления периодом экспонирования при съемке неподвижного изображения. Диафрагма 102 и вторая группа 103 линз могут перемещаться как единое целое в направлении OA оптической оси и обеспечивать функцию зума посредством перемещения вместе с первой группой 101 линз. Фокусирующая линза 104 также может перемещаться в направлении OA оптической оси, причем расстояние до объекта (фокусное расстояние), при котором блок 100 объектива сфокусирован, изменяется в зависимости от позиции фокусирующей линзы 104. Регулировка фокуса, то есть, регулировка фокусного расстояния блока 100 объектива выполняется путем управления позицией фокусирующей линзы 104 в направлении OA оптической оси.
Система привода/управления содержит привод 111 зума, привод 112 диафрагмы, привод 113 фокуса, схему 114 управления приводом зума, схему 115 управления приводом диафрагмы, схему 116 управления приводом корпуса, микропроцессорный блок МPU 117 объектива и память 118 объектива.
Схема 114 управления приводом зума приводит в движение первую группу 101 линз и третью группу 103 линз в направлении OA оптической оси, используя привод 111 зума, и управляет углом обзора оптической системы блока 100 объектива. Схема 115 управления приводом диафрагмы приводит в движение диафрагму 102, используя привод 112 диафрагмы, и управляет апертурой и операциями открывания и закрывания диафрагмы 102. Схема 116 управления приводом фокуса приводит в движение фокусирующую линзу 104 в направлении OA оптической оси, используя привод 113 фокуса, и управляет фокусным расстоянием оптической системы блока 100 объектива. Схема 116 управления приводом фокуса определяет текущее позицию фокусирующей линзы 104, используя привод 113 фокуса.
Блок MPU (процессор) 117 линз выполняет все вычисления и управление, связанное с блоком 100 объектива, а также управляет схемой 114 управления зумом, схемой 115 управления приводом диафрагмы и схемой 116 управления приводом фокуса. MPU 117 объектива соединен с MPU 125 камеры через держатель M и осуществляет с ним обмен командами и данными. Например, MPU 117 объектива определяет позицию фокусирующей линзы 104 и уведомляет MPU 125 камеры о ее позиции в соответствии с запросом от MPU 125 камеры. Эта информация о позиции фокусирующей линзы содержит такую информацию, как позиция фокусирующей линзы 104 в направлении OA оптической оси, позиция в направлении OA оптической оси и диаметр выходного зрачка в состоянии, когда оптическая система не движется, а также позиция в направлении OA оптической оси и диаметр оправы объектива, которая ограничивает лучи света выходного зрачка. MPU 117 объектива также управляет схемой 114 управления приводом зума, схемой 115 управления приводом диафрагмы и схемой 116 управления приводом фокуса в соответствии с запросом от MPU 125 камеры. Оптическая информация, необходимая для автоматической фокусировки, записывается заранее в памяти 118 объектива. Блок MPU 125 камеры управляет операциями блока 100 объектива путем выполнения программы, хранящейся в энергонезависимой памяти, встроенной в MPU 125 камеры или память 118 объектива.
Описание конфигурации устройства для съемки изображения - корпус камеры
Корпус 120 камеры содержит оптическую систему (оптический фильтр 121 нижних частот и датчик 122 изображения) и систему привода/управления. Первая группа 101 линз, диафрагма 102, вторая группа 103 линз и фокусирующая линза 104 в блоке 100 объектива, а также оптический фильтр 21 нижних частот в корпусе 120 камеры образуют оптическую систему формирования изображения.
Оптический фильтр 21 нижних частот ослабляет псевдоцвета и муар в заснятом изображении. Датчик 122 изображения состоит из датчика изображения на основе КМОП-структуры и периферийной схемы и имеет m пикселей, скомпонованных в горизонтальном направлении и n пикселей, скомпонованных в вертикальном направлении (где m и n - целые числа, равные или превышающие 2). Датчик 122 изображения в настоящее варианте осуществления имеет функцию разделения зрачка и способен выполнять фазоразностную AF, используя данные изображения. Схема 124 обработки изображения создает (из данных изображения, выданных датчиком 122 изображения) данные для фазоразностной AF и данные изображения для отображения, записи и контрастной AF (TVAF).
Система привода/управления содержит схему 123 возбуждения датчика, схему 124 обработки изображения, MPU 125 камеры, дисплей 126, группу 127 операционных переключателей, память 128, блок 129 фазоразностной AF и блок 130 TVAF.
Схема 123 управления возбуждением датчика управляет операциями датчика 122 изображения, выполняет аналого-цифровое преобразование полученного сигнала изображения и передает преобразованный сигнал изображения в MPU 125 камеры. Схема 124 обработки изображения выполняет обработку изображения, которая обычно выполняется в цифровой камере, такую как Y преобразование, процесс балансировки белого, процесс цветовой интерполяции и процесс кодирования со сжатием на данных изображения, полученных датчиком 122 изображения. Схема 124 обработки изображения также создает сигнал для фазоразностной AF.
MPU (процессор) 125 камеры выполняет все вычисления и управление, относящееся к корпусу 120 камеры, а также управляет схемой 123 управления приводом датчика, схемой 124 обработки изображения, дисплеем 126, группой 127 операционных переключателей, памятью 128, блоком 129 фазоразностной AF и блоком 130 TVAF. Блок MPU 125 камеры подсоединен к MPU 117 объектива через сигнальную шину держателя M и осуществляет обмен командами и данными с MPU 117 объектива. Блок MPU 125 камеры выдает в MPU 117 объектива запрос на получение информации о позиции объектива, запрос на приведение в движение диафрагмы, фокусирующей линзы или на зуминг с заранее заданной величиной перемещения, запрос на получение оптической информации, уникальной для блока 100 объектива, и т.п. Блок MPU 125 камеры включает в себя ПЗУ 125а, где хранится программа для управления операциями камеры, ОЗУ (RAM) 125b, где хранятся переменные, и электрически стираемое программируемое ПЗУ (EEPROM) 125с, где хранятся различные параметры.
Дисплей 126 сформирован на основе жидкокристаллического дисплея (LCD) или т.п. и отображает информацию, относящуюся к режиму формирования изображений камеры, изображение для предварительного просмотра перед формированием изображения, изображение для проверки после формирования изображения, изображение в состоянии «в фокусе» в момент обнаружения фокуса и т.п. Группа 127 операционных переключателей состоит из выключателя питания, выключателя спуска (спусковой механизм запуска формирования изображения), выключателя операции зум, переключателя выбора режима формирования изображения и т.п. Память 128 в данном варианте осуществления представляет собой съемную флэш-память, в которую записываются полученные изображения.
Блок 129 фазоразностной AF выполняет процесс обнаружения фокуса с помощью метода фазоразностного определения с использованием данных для обнаружения фокуса, полученных схемой 124 обработки изображения. В частности, схема 124 обработки изображения создает в качестве данных для обнаружения фокуса данные пары изображений, сформированных световыми лучами, проходящими через пару областей зрачка в оптической системе формирования изображения, а блок 129 фазоразностной AF определяет величину смещения фокуса на основе величины смещения в данных указанной пары изображений. Таким образом, блок 129 фазоразностной AF в данном варианте осуществления выполняет фазоразностную AF (фазоразностная AF в плоскости формирования изображения) на основе выходного сигнала датчика 122 изображения без использования специального датчика AF. Операции, выполняемые блоком 129 фазоразностной AF, более подробно описываются ниже.
Блок 130 TVAF выполняет процесс обнаружения фокуса методом контрастного определения на основе оценочного значения для TVAF (информация о контрасте данных изображения), созданного схемой 124 обработки изображения. В процессе обнаружения фокуса методом контрастного определения фокусирующая линза 104 перемещается, и в качестве позиция «в фокусе» определяется позицию фокусирующей линзы, в котором упомянутое оценочное значение достигает максимального значения.
Таким образом, цифровая камера в настоящем варианте осуществления может выполнять как фазоразностную AF, так и TVAF, и может избирательно использовать их в зависимости от ситуации, либо может использовать их вместе.
Описание операции обнаружения фокуса: фазоразностная AF
Ниже дополнительно описываются операции блока 129 фазоразностной AF и блока 130 TVAF.
Сначала следует описание операций, выполняемых блоком 129 фазоразностной AF.
На фиг. 3А представлена схема, показывающая пиксельную матрицу в датчике 122 изображения согласно настоящему варианту осуществления, а также показывающая состояние области, покрывающей 6 (в направлении Y) линии в вертикальном направлении и 8 (в направлении Х) столбцов в горизонтальном направлении двумерного датчика на основе К-МОП структуры (вид со стороны блока 100 объектива). Датчик 122 изображения снабжен цветным фильтром с шаблоном Байера, где в линии с нечетным номером, зеленый (G) и красный (R) цветные фильтры расположены чередующимися в каждом пикселе слева, тогда как в линии с четным номером синий (B) и зеленый (G) цветные фильтры расположены чередующимися в каждом пикселе слева. В пикселе 211 окружность 211i представляет внутрикристальную микролинзу, а множество прямоугольников, а именно, прямоугольников 211а и 211b, скомпонованные в микролинзах, представляют собой блоки фотоэлектрического преобразования.
В датчике 122 изображения согласно настоящему варианту осуществления блок фотоэлектрического преобразования в каждом пикселе разделен на две части в направлении X, причем сигналы фотоэлектрического преобразования отдельных блоков фотоэлектрического преобразования и сумма сигналов фотоэлектрического преобразования могут считываться независимо. Путем вычитания сигнала фотоэлектрического преобразования одного из блоков фотоэлектрического преобразования из суммы сигналов фотоэлектрического преобразования можно получить сигнал, соответствующий сигналу фотоэлектрического преобразования другого блока фотоэлектрического преобразования. Сигналы фотоэлектрического преобразования отдельных блоков фотоэлектрического преобразования можно использовать в качестве данных для фазоразностной AF, а также для создания параллаксного изображения, образующего 3D (трехмерное) изображение. Упомянутую сумму сигналов фотоэлектрического преобразования можно использовать как обычные данные заснятого изображения.
Далее описывается пиксельный сигнал в случае выполнения фазоразностной AF. Как будет описано ниже, согласно настоящему варианту осуществления микролинза 211i и разделенные блоки 211а и 211b фотоэлектрического преобразования на фиг. 3А выполняют разделение зрачка на выходных световых лучах оптической системы формирования изображения. Что касается множества пикселей 211 в заранее заданной области, скомпонованной в одной и той же пиксельной линии, то изображение, сформированное путем объединения выходных сигналов блоков 211а фотоэлектрического преобразования, устанавливается в качестве изображения A автофокусировки АF, а изображение, сформированное путем объединения выходных сигналов блоков 211b фотоэлектрического преобразования, устанавливается в качестве изображения В автофокусировки AF. В выходных сигналах блоков 211а и 211b фотоэлектрического преобразования используется псевдояркостный (Y) сигнал, вычисленный путем суммирования выходных сигналов зеленого, красного, синего и зеленого, которые включены в единичную матрицу цветного фильтра. Однако изображения A и B автофокусировки AF могут быть сформированы для каждого из цветов: красного, синего и зеленого. Посредством обнаружения, с использованием вычисления корреляции, относительной величины смещения между изображениями А и В автофокусировки AF, созданными как было описано выше, можно определить величину смещения фокуса (величину дефокусировки) в заранее заданной области. В настоящем варианте осуществления с датчика 122 изображения считываются выходной сигнал одного из блоков фотоэлектрического преобразования в каждом пикселе и сумма выходных сигналов обоих блоков фотоэлектрического преобразования в пикселе. Например, в случае считывания выходного сигнала блока 211а фотоэлектрического преобразования и суммы выходных сигналов блоков 211а и 211b фотоэлектрического преобразования выходной сигнал блока 211b фотоэлектрического преобразования получают путем вычитания выходного сигнала блока 211а фотоэлектрического преобразования из упомянутой суммы. Таким образом, можно получить оба изображения А и В, выполнив тем самым фазоразностную AF. Поскольку датчик изображения указанного типа известен (раскрыт в выложенном патенте Японии №2004-134867), его подробное описание будет опущено.
На фиг. 3В представлена схема, показывающая примерную конфигурацию схемы считывания датчика 122 изображения согласно настоящему варианту осуществления. Ссылочная позиция 151 обозначает схему горизонтального сканирования, а ссылочная позиция 153 обозначает схему вертикального сканирования. Линии 152а и 152b горизонтального сканирования и линии 154а и 154b вертикального сканирования скомпонованы на граничных участках каждого пикселя, и сигнал каждого блока фотоэлектрического преобразования считывается вовне через эти линии сканирования.
Заметим, что датчик изображения согласно настоящему варианту осуществления имеет два вида режима считывания вдобавок к вышеописанному способу считывания каждого пикселя. Первый режим считывания называется «режимом считывания всех пикселей», и представляет режим для съемки неподвижного изображения с высоким разрешением. В этом случае считываются сигналы всех пикселей.
Второй режим считывания называется «режимом прореживающего считывания», который представляет собой режим, предназначенный только для записи движущихся изображений или отображения изображения для предварительного просмотра. Поскольку необходимые количества пикселей в этом случае меньше общего количества пикселей, считываются только пиксели в пиксельной группе, которые остались после прореживания при предварительно заданном соотношении в направлении Х и направлении Y. Режим прореживающего считывания также используют в случае, когда необходимо высокоскоростное считывание. При прореживании пикселей в направлении Х сигналы суммируются для улучшения отношения сигнал/шум, а при прореживании пикселей в направлении Y выходные сигналы в прореженных линиях игнорируются. Фазоразностная AF и контрастная AF также обычно выполняются на основе сигналов, считываемых во втором режиме считывания.
На фигурах 4А и 4В представлены схемы, иллюстрирующие сопряженную взаимосвязь между плоскостью выходного зрачка оптической системы формирования изображения и блоками фотоэлектрического преобразования в датчике изображения, скомпонованном на высоте 0 изображения, то есть, рядом с центром поверхности изображения в устройстве для съемки изображений согласно настоящему варианту осуществления. Блоки фотоэлектрического преобразования в датчике изображения и плоскость выходного зрачка оптической системы формирования изображения сконструированы таким образом, чтобы имела место сопряженная взаимосвязь через внутрикристальную микролинзу. В общем случае выходной зрачок оптической системы формирования изображения приблизительно совпадает с плоскостью, на которой расположена ирисовая диафрагма для регулировки количества света. С другой стороны, оптическая система формирования изображения согласно настоящему варианту осуществления представляет собой вариообъектив, имеющий функцию изменения увеличения. В зависимости от типа оптики расстояние выходного зрачка от поверхности изображения или размер выходного зрачка изменяется при выполнении операции изменения увеличения. На фигурах 4А и 4В показано состояние, когда фокусное расстояние блока 100 объектива находится в центре между одной крайней позицией «широкоугольная съемка» и другой крайней позицией «телефото». Оптимальный вариант формы микролинзы и параметр эксцентриситета, подходящий для высоты изображения (координаты Х и Y), достигается при использовании в этом состоянии расстояния Zep до плоскости изображения в качестве стандартного значения.
На фиг. 4А ссылочная позиция 101 обозначает первую группу линз, ссылочная позиция 101b обозначает бочкообразный элемент, который поддерживает первую группу линз, ссылочная позиция 105 обозначает третью группу линз, а ссылочная позиция 104b обозначает бочкообразный элемент, который поддерживает фокусирующую линзу 104. Ссылочная позиция 102 обозначает диафрагму, ссылочная позиция 102а обозначает апертурную пластину, которая определяет апертуру при открытой диафрагме, а ссылочная позиция 102b обозначает лепестки диафрагмы для регулировки апертуры при суженной диафрагме. Заметим, что ссылочные позиции 101b, 102а, 102b и 104b, которые играют роль ограничителей световых потоков, проходящих через оптическую систему формирования изображения, обозначают виртуальное оптическое изображение, наблюдаемое с поверхности изображения. Синтетическое отверстие рядом с диафрагмой 102 определено как выходной зрачок объектива, причем его расстояние от поверхности изображения равно Zep, как упоминалось выше.
Пиксель 211, скомпонованный вблизи центра поверхности изображения, далее называется «центральным пикселем» согласно настоящему варианту осуществления. Центральный пиксель 211 сформирован, начиная с самого низкого уровня, из блоков 211а и 211b фотоэлектрического преобразования, на уровнях 211е-211g из цветного фильтра 211h и микролинзы 211i. Два блока фотоэлектрического преобразования направлены к плоскости выходного зрачка оптической системы формирования изображения посредством внутрикристальной микролинзы 211i. Другими словами, выходной зрачок оптической системы формирования изображения направлен на поверхность блоков фотоэлектрического преобразования через внутрикристальную микролинзу 211i.
На фиг. 4В показаны спроецированные изображения блоков фотоэлектрического преобразования на плоскость выходного зрачка оптической системы формирования изображения, где эти спроецированные изображения, соответствующие блокам 211а и 211b фотоэлектрического преобразования, обозначены соответственно как EP1a и EP1b. В настоящем варианте осуществления датчик изображения имеет один пиксель, из которого можно получить выходной сигнал одного из двух блоков 211а и 211b фотоэлектрического преобразования и выходной сигнал суммы выходов обоих блоков фотоэлектрического преобразования. Выходной сигнал суммы выходов из обоих блоков фотоэлектрического преобразования получают путем выполнения фотоэлектрического преобразования на световых лучах, прошедших через обе области спроецированных изображений EP1а и EP1b, которые приблизительно покрывают всю область зрачка оптической системы формирования изображения.
На фиг. 4А, где знак L обозначает внешние участки световых лучей, проходящих через оптическую систему формирования изображения, световой луч L ограничен апертурной пластиной 102а диафрагмы, в связи с чем в спроецированных изображениях EP1a и EP1b фактически не создается виньетирование. На фиг. 4В световой луч L по фиг. 4А обозначен как TL. Можно прийти к выводу, что виньетирование фактически не возникает также из-за того обстоятельства, что большая часть спроецированных изображений EP1a и EP1b в блоках фотоэлектрического преобразования не выходит за границы окружности, обозначенной как TL. Поскольку световой луч L ограничен только апертурной пластиной 102а диафрагмы, луч TL может быть заменен на 102а. В это время состояния виньетирования спроецированных изображений EP1a и EP1b симметричны относительно оптической оси в центре поверхности изображения, и количество света, воспринимаемого блоками 211а и 211b фотоэлектрического преобразования, одинаковы для обоих блоков.
В случае выполнения фазоразностной AF процессор MPU 125 камеры управляет схемой 123 управления возбуждением датчика, чтобы обеспечить считывание вышеупомянутых двух типов выходного сигнала из датчика 122 изображения. Затем MPU 125 камеры предоставляет в схему 124 обработки изображения информацию об области обнаружения фокуса и выдает в схему 124 обработки изображения команду на создание данных изображений А и В автофокусировки AF из выходных сигналов пикселей, входящих в область обнаружения фокуса, и подает эти данные в блок 129 фазоразностной AF. Схема 124 обработки изображения создает данные изображений А и В автофокусировки AF и выводит эти данные в блок 129 фазоразностной AF согласно упомянутой команде. Схема 124 обработки изображения также выдает данные изображения в формате RAW в блок 130 TVAP.
Как было описано выше, датчик 122 изображения образует часть устройства обнаружения фокуса, использующего как фазоразностную AF, так и контрастную AF.
Заметим, что, хотя здесь была описана примерная конфигурация, в которой выходной зрачок разделен по горизонтали на две части, некоторые пиксели в датчике изображения могут иметь конфигурацию, в которой выходной зрачок разделен на две части по вертикали. Также возможна конфигурация, в которой выходной зрачок разделен как по вертикали, так и по горизонтали. В результате обеспечение пикселя, в котором выходной зрачок разделен по вертикали, фазоразностная AF позволяет оперировать как горизонтальным контрастом, так и вертикальным контрастом объекта.
(Описание операции обнаружения фокуса: контрастная AF)
Далее со ссылками на фиг. 5 описывается контрастная автофокусировка (TVAF). Контрастная AF обеспечивается MPU 125 камеры и блоком 130 TVAF, многократно выполняющими разделение фокусирующей линзы и вычисление оценочных значений во взаимосвязи друг с другом.
После ввода данных изображения в формате RAW из схемы 124 обработки изображения в блок 130 TVAF схема 401 обработки оценочного сигнала AF выделяет сигнал зеленого (G) из сигналов шаблона Байера и выполняет процесс гамма-коррекции для улучшения компонент низкой яркости и подавления компонент высокой яркости. Хотя настоящий вариант осуществления описывается для случая выполнения автофокусировки TVAF с использованием сигнала зеленого (G), могут быть использованы все сигналы красного (R), синего (B) и зеленого (G). Сигнал яркости (Y) может быть создан с использованием всех цветов RGB. В последующем описании выходной сигнал, созданный схемой 401 обработки оценочного сигнала AF, называется «сигналом Y яркости», независимо от типа используемого сигнала.
Заметим, что, как здесь предполагается, область обнаружения фокуса установлена в схеме 413 установки области блоком MPU 125 камеры. Схема 413 установки области создает селекторный сигнал для выбора сигнала внутри установленной области. Селекторный сигнал вводится в схему 402 обнаружения пикового значения, схему 403 горизонтальной интеграции, схему 404 обнаружения минимального значения в линии, схему 409 обнаружения пикового значения в строке, схемы 406 и 410 вертикальной интеграции и схемы 405, 407 и 411 обнаружения вертикального пикового значения. Временные характеристики сигнала Y яркости, вводимого в каждую схему управляются таким образом, чтобы каждое оценочное значение фокуса создавалось с сигналом Y яркости в рамках области обнаружения фокуса. Заметим, что в соответствии с данной областью обнаружения фокуса в схеме 413 установки области может быть установлено множество областей.
Далее описывается способ вычисления пикового оценочного значения Y. Сигнал Y яркости, который претерпел гамма-коррекцию, вводится в схему 402 обнаружения пикового значения в линии, и пиковое значение Y каждой горизонтальной линии получают в области обнаружения фокуса, установленной схемой 413 установки области. Пик выходного сигнала схемы 402 обнаружения пика линии поддерживается в вертикальном направлении в области обнаружения фокуса схемой 405 обнаружения вертикального пика, и создается оценочное значение пика Y. Оценочное значение пика Y является показателем, эффективным при определении объекта с высокой яркостью и объекта с низкой яркостью.
Далее описывается способ вычисления интегрального оценочного значения Y. Сигнал Y яркости, который претерпел гамма-коррекцию, вводится в схему 403 горизонтальной интеграции, после чего получают интегральное значение Y в каждой горизонтальной линии в области обнаружения фокуса. Кроме того, выход схемы 403 горизонтальной интеграции интегрируется в вертикальном направлении в области обнаружения фокуса схемой 406 вертикальной интеграции, после чего создается интегральное оценочное значение Y. Интегральное оценочное значение Y можно использовать в качестве показателя для определения яркости всей области обнаружения фокуса в целом.
Далее описывается способ вычисления максимального-минимального оценочного значения. Сигнал Y яркости, претерпевший гамма-коррекцию, вводится в схему 402 обнаружения пикового значения линии, после чего получают пиковое значение Y каждой горизонтальной линии в области обнаружения фокуса. Сигнал Y яркости, претерпевший гамму-коррекцию, также вводится в сему 404 обнаружения минимального значения в линии, и минимальное значение Y определяют в каждой горизонтальной линии в области обнаружения фокуса. Обнаруженное пиковое значение линии и минимальное значение Y в каждой горизонтальной линии вводят в вычитатель, и в схему 407 обнаружения вертикального пикового значения вводят (пиковое значение - минимальное значение линии). Схема 407 обнаружения вертикального пика сохраняет это пиковое значение в вертикальном направлении в области обнаружения фокуса и создает максимальное - минимальное оценочное значение. Максимальное - минимальное оценочное значение представляет собой показатель, эффективный для определения низкого контраста и высокого контраста.
Далее описывается способ вычисления оценочного пикового значения области. При пропускании сигнал Y яркости, претерпевший гамма-коррекцию, через фильтр BPF 408 выделяются специфические частотные компоненты, после чего создается сигнал фокуса. Этот сигнал фокуса вводится в схему 409 обнаружения пика линии и получают пиковое значение в каждой горизонтальной линии в области обнаружения фокуса. Пиковое значение линии сохраняется в виде пикового значения в области обнаружения фокуса схемой 411 обнаружения пика по вертикали, после чего создается оценочное пиковое значение области. Оценочное пиковое значение области изменяется лишь в малой степени даже в том случае, если объект перемещается в области обнаружения фокуса, и соответственно, это значение является показателем, эффективным для определения повторного запуска, то есть определения того, следует ли снова переходить к процессу нахождения точки «в фокусе» из состояния «в фокусе».
Далее описывается способ вычисления интегрального оценочного значения для всех линий. Как и в случае с оценочным пиковым значением области, схема 409 обнаружения пика линии получает значение пика линии в каждой горизонтальной линии в области обнаружения фокуса. Затем схема 409 обнаружения пика линии вводит пиковое значение линии в схему 410 вертикальной интеграции и интегрирует в вертикальном направлении пиковое значение линии в соответствии с количеством всех линий горизонтального сканирования в области обнаружения фокуса для создания интегрального оценочного значения всех линий. Высокочастотное интегральное оценочное значение всех линий, имеющее широкий динамический диапазон и высокую чувствительность благодаря эффекту интеграции, является главным оценочным значением AF. Соответственно, в настоящем варианте осуществления при упоминании «оценочного значения фокуса» имеется в виду интегральное оценочное значение всех линий.
Блок 151 управления AF в MPU 125 камеры получает выше упомянутые соответствующие оценочные значения фокуса и перемещает фокусирующую линзу 104 в заранее заданном направлении вдоль оптической оси на заранее заданную величину посредством MPU 117 объектива. Затем блок 151 управления AF вычисляет вышеупомянутые различные оценочные значения на основе вновь полученных данных изображения и определяет позицию фокусирующей линзы, в котором интегральное оценочное значение всех линий является максимальным.
В настоящем варианте осуществления различные оценочные значения AF вычисляют в направлении горизонтальных линий и направлении вертикальных линий. Тем самым, может быть выполнено обнаружение фокуса в соответствии с информацией о контрасте в двух перпендикулярных направлениях, а именно, горизонтальном направлении и вертикальном направлении.
(Описание области обнаружения фокуса)
На фиг. 6 представлена схема, показывающая примерные области обнаружения фокуса в зоне формирования изображения. Как упоминалось выше, фазоразностная AF и контрастная AF выполняются на основе сигналов, полученных от пикселей, включенных в области обнаружения фокуса. На фиг. 6 большой прямоугольник, изображенный пунктирными линиями, представляет зону 217 формирования изображения, в которой сформированы пиксели датчика 122 изображения. В зоне 217 формирования изображения установлены области 218ah, 218bh и 218ch для фазоразностной AF. Согласно настоящему варианту осуществления области 218ah, 218bh и 218ch обнаружения фокуса для фазоразностной AF установлены в трех частях: центральной части зоны 217 формирования изображения, и двух частей соответственно слева и справа от нее. Также установлены области 219a, 219b и 219с для TVAF, так что они соответственно окружают области 218ah, 218bh и 218ch обнаружения фокуса для фазоразностной AF. Заметим, что на фиг. 6 показана примерная установка областей обнаружения фокуса, то есть, количество, положение и размер областей обнаружения фокуса не ограничиваются показанными на фиг. 6 областями.
(Описание последовательности операций процесса обнаружения фокуса)
Далее со ссылками на фигуры 1А и 1В описывается процесс автоматической фокусировки (AF) в цифровой камере согласно настоящему варианту осуществления.
Сначала следует общее описание процесса AF, а затем его подробное описание. Согласно настоящему варианту осуществления MPU 125 камеры первоначально использует фазоразностную AF для областей 218ah, 218bh и 218ch обнаружения фокуса для получения величины смещения фокуса (величины дефокусировки) каждой области обнаружения фокуса и оценки надежности этой величины дефокусировки. Если величина дефокусировки с заранее заданной надежностью получена во всех областях 218ah, 218bh и 218ch обнаружения фокуса, то MPU 125 камеры перемещает фокусирующую линзу 104 на позицию «в фокусе» для ближайшего объекта на основе упомянутой величины дефокусировки.
С другой стороны, если не удалось получить величину дефокусировки с заранее заданной надежностью для какой-либо из областей обнаружения фокуса, то MPU 125 камеры получает оценочное значение фокуса в отношении области обнаружения фокуса для контрастной AF, включающей в себя область обнаружения фокуса, для которой не удалось получить величину дефокусировки с заранее заданной надежностью. Процессор MPU 125 камеры определяет, имеется ли какой-либо объект ближе в отношении расстояния до камеры в соответствии с величиной дефокусировки, полученной посредством фазоразностной AF, на основе взаимосвязи между изменением оценочного значения фокуса и позицией фокусирующей линзы 104. Если определено, что такой объект имеется, то MPU 125 камеры приводит в движение фокусирующую линзу 104 в направлении, обусловленном изменением оценочного значения фокуса.
Заметим, что, если оценочное значение фокуса ранее не было получено, то величину изменения оценочного значения фокуса получить невозможно. В этом случае, если существует область обнаружения фокуса, из которой была получена величина дефокусировки, превышающая заранее заданную величину дефокусировки, с заранее заданной надежностью, MPU 125 камеры приводит в движение фокусирующую линзу 104 с тем, чтобы сфокусироваться на ближайшем объекте в данной области обнаружения фокуса. Если величина дефокусировки с заранее заданной надежностью не была получена, и, если была получена величина дефокусировки, превышающая заранее заданную величину дефокусировки, то MPU 125 камеры приводит в движение фокусирующую линзу 104 на заранее заданную величину, которая не связана с величиной дефокусировки. Причина этого состоит в том, что при приведении в движение фокусирующей линзы 104 на основе небольшой величины дефокусировки, с большой вероятностью будет трудно обнаружить изменение оценочного значения фокуса во время следующего обнаружения фокуса.
По окончании обнаружения фокуса любым из упомянутых способов MPU 125 камеры вычисляет различные значения коррекции и корректирует результат обнаружения фокуса. Затем MPU 125 камеры приводит в движение фокусирующую линзу 104 на основе результата обнаружения фокуса после коррекции.
Далее с использованием блок-схем, показанных фигурах 1А и 1В, описываются детали раскрытого выше процесса AF. Последующие операции процесса AF в основном выполняются процессором MPU 125 камеры за исключением случаев, когда однозначно указано, что данную операцию выполняет другой блок. Когда MPU 125 камеры приводит в движение или управляет блоком 100 объектива путем передачи команды или т.п. на MPU 117 объектива, для упрощения описания иногда указывается, что данную операцию выполняет MPU 125 камеры.
На шаге S1 блок MPU 125 камеры устанавливает области обнаружения фокуса. Здесь предполагается, что установлены три области обнаружения фокуса, такие как области, показанные на фиг. 6, для фазоразностной AF и контрастной AF.
На шаге S2 блок MPU 125 камеры устанавливает флаг определения в состояние 1 в памяти RAM 125b.
На шаге S3 блок MPU 125 камеры экспонирует датчик 122 изображения, считывает сигналы изображения и инициирует создание сигналов изображения схемой 124 обработки изображения для фазоразностной AF на основе данных изображения в областях 218ah, 218bh и 218ch обнаружения фокуса для фазоразностной AF. Блок MPU 125 камеры также инициирует подачу схемой 124 обработки изображения данных изображения в формате RAW, созданных схемой 124 обработки изображения, в блок 130 TVAF, и инициирует вычисление блоком 130 TVAF оценочных значений на основе пиксельных данных в областях 219а, 219b и 219с обнаружения фокуса для автофокусировки TVAF. Заметим, что перед созданием сигналов изображения для фазоразностной AF в схеме 124 обработки изображения может быть применен процесс (смотри выложенный патент Японии №2010-117679) для коррекции асимметрии выходного зрачка, вызванной виньетированием световых лучей из-за оправы линз формирования изображения или т.п.. Оценочное значение фокуса, вычисленное блоком 130 TVAF, запоминается в RAM 125b, входящей в состав MPU 125 камеры.
На шаге S4 блок MPU 125 камеры определяет, было ли обнаружено надежное пиковое (максимальное) оценочное значение фокуса. Если надежное пиковое значение обнаружено, то блок MPU 125 камеры переходит к обработке на шаге S20, чтобы закончить процесс обнаружения фокуса. Заметим, что способ вычисления надежности пикового оценочного значения фокуса не ограничен; например, можно использовать способ, описанный со ссылками на фигуры 10-13 в выложенном патенте Японии №2010-78810. В частности, определяют, указывает ли обнаруженное пиковое значение на высшую точку кривой, путем сравнения с соответствующими пороговыми значениями разности между максимальным значением и минимальным значением оценочного значения фокуса, длины участка с наклоном, большим или равным фиксированному значению (SlopeThr) и крутизны наклонного участка. Если все пороговые условия удовлетворяются, то можно сделать вывод, что пиковое значение является надежным.
Согласно настоящему варианту осуществления используются оба вида AF: фазоразностная и контрастная. По этой причине, если подтверждено, что в той же области обнаружения фокуса или в других областях обнаружения фокуса имеется более близкий объект, то процесс может перейти к шагу S5, не закончив обнаружение фокуса, даже в том случае, если обнаружено надежное оценочное значение пика. Однако в этом случае запоминается позиция фокусирующей линзы 104, соответствующая пику надежного оценочного значения фокуса, и запомненная позиция фокусирующей линзы 104 используется в качестве результата обнаружения фокуса, если в процессе на шаге S5 и последующих шагах не получен надежный результат обнаружения фокуса.
На шаге S5, блок 129 фазоразностной AF вычисляет величину смещения (разность фаз) между парой сигналов изображения, полученных от схемы 124 обработки изображения, для каждой из областей 218ch, 218ah, 218bh и преобразует разность фаз в величину дефокусировки, используя коэффициент преобразования, который запомнен заранее. Здесь также определяется надежность вычисленной величины дефокусировки, и в процессе последующей AF используется только та величина дефокусировки области обнаружения фокуса, которая определена с заранее заданной надежностью. Разность фаз, обнаруженная между парой сигналов изображения, содержит тем больше ошибок, чем больше величина дефокусировки, из-за влияния виньетирования, инициированного оправой объектива или т.п. По этой причине можно определить, что полученная величина дефокусировки не обладает заранее заданной надежностью (то есть, имеет низкую надежность) в том случае, когда полученная величина дефокусировки превышает пороговое значение, где степень совпадения форм пары сигналов изображения низкая, или когда низок контраст сигналов изображения. Случай, когда определено, что полученная величина дефокусировки имеет заранее заданную надежность, называется ниже случаем, когда «возможно вычисление величины дефокусировки». Случай, когда величину дефокусировки по некоторой причине нельзя вычислить, и случай, когда определено, что надежность величины дефокусировки низка, называется здесь случаем, когда «невозможно вычислить величину дефокусировки».
На шаге S6 блок MPU 125 камеры проверяет, можно ли вычислить величину дефокусировки во всех областях 218ah, 218bh и 218ch обнаружения фокуса для фазоразностной AF, которые установлены на шаге S1. Если величину дефокусировки можно вычислить для всех областей обнаружения фокуса, то MPU 125 камеры переходит к обработке на шаге S20 и вычисляет корректирующее значение (BP1) по вертикали/горизонтали в отношении той области обнаружения фокуса, в которой вычисленная величина дефокусировки указывает на существование ближайшего объекта. Здесь причина выбора ближайшего объекта состоит в том, что обычно объект, на который человек, производящий съемку, хочет сфокусировать камеру, чаще находится со стороны приближения. Корректирующее значение (BP1) по вертикали/горизонтали представляет собой значение, необходимое для коррекции разности в результате обнаружения фокуса в случае выполнения обнаружения фокуса в соответствии с горизонтальным контрастом объекта или результатом обнаружения фокуса в случае выполнения обнаружения фокуса в соответствии с вертикальным контрастом объекта.
Обычный объект имеет контраст в двух направлениях: по горизонтали и вертикали, и состояние фокуса заснятого изображения также оценивается с учетом контраста как в горизонтальном, так и в вертикальном направлении. С другой стороны, при выполнении обнаружения фокуса только в горизонтальном направлении, как в вышеописанной AF с использованием способа фазоразностного обнаружения, между результатом обнаружения фокуса по горизонтали и состоянием фокуса в обоих направлениях (горизонтальном и вертикальном) заснятого изображения появляется ошибка. Причиной ее появления является астигматизм или т.п. в оптической системе формирования изображения. Корректирующее значение (BP1) по вертикали/горизонтали предназначено для коррекции этой ошибки, причем это значение вычисляют с учетом выбранной области обнаружения фокуса, позиции фокусирующей линзы 104, позиции первой группы 101 линз, указывающее состояние зума, и т.п. Подробности этого способа вычислений описываются ниже.
На шаге S21 блок MPU 125 камеры вычисляет корректирующее значение (BP2) для цвета в соответствии с областью обнаружения фокуса, являющейся целью вычисления корректирующего значения на шаге S20 с использованием информации о вертикальном или горизонтальном контрасте. Корректирующее значение (BP2) для цвета создается ввиду хроматической аберрации в оптической системе формирования изображения и создается из-за разности между цветовым балансом сигнала, используемого при обнаружении фокуса, и цветовым балансом сигнала, использованного в заснятом изображении или проявленном изображении. Например, в контрастной AF согласно настоящему варианту осуществления оценочное значение фокуса создается на основе выхода пикселя (зеленый пиксель), имеющего зеленый (G) цветовой фильтр, и, следовательно, в основном обнаруживается позиция «в фокусе» для длины волны зеленого. Однако, поскольку заснятое изображение создается с использованием всех RGB цветов, если позиция «в фокусе» красного (R) или синего (B) отличается от позиции зеленого (G) (то есть, существует осевая хроматическая аберрация), появляется смещение (ошибка) исходя из результата обнаружения фокуса на основе оценочного значения фокуса. Корректирующее значение, предназначенное для коррекции этой ошибки, представляет собой корректирующее значение (BP2) для цвета. Подробности способа вычисления корректирующего значения (BP2) для цвета будут описаны ниже.
На шаге S22 блок MPU 125 камеры вычисляет корректирующее значение (BP3) специфической пространственной частоты в отношении области обнаружения фокуса, являющейся целью коррекции, с использованием информации о контрасте сигнала зеленого или сигнала Y яркости в вертикальном или горизонтальном направлении. Корректирующее значение (BP3) для пространственной частоты создается в основном из-за сферической аберрации в оптической системе формирования изображения, а также из-за разности между оценочной частотой (полосой) сигнала, используемого при обнаружении фокуса, и оценочной частотой (полосой) во время оценки заснятого изображения. Поскольку сигналы изображения во время обнаружения фокуса считываются с датчика изображения во втором режиме, как упоминалось выше, с выходными сигналами были выполнены операции суммирования и прореживания. По этой причине выходной сигнал, используемый при обнаружении фокуса, имеет более низкую оцененную полосу по сравнению с заснятым изображением, созданным с использованием сигналов всех пикселей, которые считываются в первом режиме считывания. Корректирующее значение (BP3) для пространственной частоты предназначено для коррекции смещения при обнаружении фокуса, созданного из-за различия в оцененной полосе. Подробности способа вычисления корректирующего значения (BP3) пространственной частоты описываются ниже.
На шаге S23, блок MPU 125 камеры корректирует результат DEF_B обнаружения фокуса в соответствии с уравнением (1), приведенным ниже, с использованием трех вычисленных корректирующих значений (BP1, BP2, BP3) и вычисляет результат DEF_A обнаружения фокуса после коррекции.
DEF_A=DEF_B+BP1+BP2+BP3 (1)
В настоящем варианте осуществления корректирующие значения для коррекции результата обнаружения фокуса вычисляют в три шага в следующем порядке: «по вертикали/горизонтали» (S20), «цвет» (S21) и «пространственная частота» (S22).
Первоначально в качестве корректирующего значения (BP1) по вертикали/горизонтали вычисляется ошибка, вызванная использованием информации о контрасте в одном направлении при обнаружении фокуса, в то время как при оценке во время оценки заснятого изображения используется информация о контрасте в обоих направлениях (вертикальном и горизонтальном).
Затем разделяют влияние BP по вертикали/горизонтали, и в качестве корректирующего значения (BP2) вычисляют разность при позиции «в фокусе» между цветом сигнала, использованного в заснятом изображении, и цветом сигнала, использованного во время обнаружения фокуса в информации о контрасте в одном направлении.
Кроме того, в качестве корректирующего значения (BP3) для пространственной частоты вычисляют разность в позиции «в фокусе», получившуюся из-за различия в оцененной полосе зеленого цвета или конкретного цвета сигнала яркости или т.п. во время оценки заснятого изображения и во время обнаружения фокуса.
Таким образом достигается сокращение объема данных, подлежащих запоминанию в памяти объектива или камеры, благодаря раздельному вычислению ошибок упомянутых трех видов.
На шаге S24 блок MPU 125 камеры приводит в движение фокусирующую линзу 104 через MPU 117 объектива на основе величины DEF_A дефокусировки после коррекции, вычисленной с использованием уравнения (1).
На шаге S25 блок MPU 125 камеры обеспечивает отображение (отображение кадра AF), указывающее область обнаружения фокуса, в которой вычисляют величину дефокусировки, используемую при приведении в движение фокусирующей линзы 104, с тем чтобы наложить его на «живое» изображение, например, на дисплее 126, после чего процесс AF заканчивается.
С другой стороны, если существует область обнаружения фокуса в которой невозможно вычислить величину дефокусировки на шаге S6, то блок MPU 125 камеры переходит к обработке на шаге S7 (фиг. 1В). На шаге S7 блок MPU 125 камеры определяет, установлен ли в 1 флаг определения. Флаг определения установлен в 1, когда не было выполнено перемещение фокусирующей линзы хотя бы раз с запуска операции AF. Если приведение в движение фокусирующей линзы когда-либо имело место, то флаг определения установлен в 0. Если флаг определения установлен в 1, то блок MPU 125 камеры переходит к обработке на шаге S8.
Если на шаге S8 блок MPU 125 камеры не может вычислить величину дефокусировки в какой-либо из областей обнаружения фокуса, или, если величина дефокусировки из числа вычисленных величин дефокусировки, указывающая на присутствие ближайшего объекта, меньше или равна заранее заданному пороговому значению А, то MPU 125 камеры переходит к обработке на шаге S9. На шаге S9 блок MPU 125 камеры приводит в движение фокусирующую линзу в направлении приближения на заранее заданную величину.
Далее объясняется причина перемещения линзы на заранее заданную величину, если результатом выполнения шага S8 является «ДА». Сначала рассматривается случай, когда величина дефокусировки не может быть вычислена в какой-либо области из множества областей обнаружения фокуса, то есть, случай, когда объект, для которого должна быть выполнена фокусировка, на данный момент не был найден. По этой причине перед определением невозможности выполнения фокусировки упомянутая линза перемещается на заранее заданную величину относительно всех областей обнаружения фокуса, чтобы проверить присутствие объекта, для которого должна быть выполнена фокусировка, так чтобы можно было определить ниже описанное изменение оценочного значения фокуса. Также рассматривается случай, когда величина дефокусировки, указывающая на присутствие ближайшего объекта (из числа вычисленных величин дефокусировки), меньше или равна заранее заданному пороговому значению А, то есть, случай, когда на данный момент времени существует область обнаружения фокуса, находящаяся в состоянии, почти совпадающем с состоянием «в фокусе». В этом случае упомянутая линза перемещается на заранее заданную величину, чтобы проверить возможность существования ближайшего объекта, который к данному моменту не обнаружен, в области обнаружения фокуса, в которой невозможно вычислить величину дефокусировки, с тем чтобы можно было определить ниже описанное изменение оценочного значения фокуса.
Заметим, что заранее заданная величина, на основе которой приводится в движение фокусирующая линза на шаге S9, может быть определена на основе рассмотрения чувствительности величины перемещения фокуса на плоскости формирования изображения в зависимости от значения F или величины перемещения привода оптической системы формирования изображения.
С другой стороны, если результатом на шаге S8 является «НЕТ», то, если величина дефокусировки (из числа вычисленных величин дефокусировки), указывающая на присутствие ближайшего объекта, превышает заранее заданное пороговое значение А, то процесс обработки переходит к шагу S10. В этом случае область обнаружения фокуса, для которой возможно вычисление величины дефокусировки, существует, но эта область обнаружения фокуса не находится в состоянии «в фокусе». По этой причине на шаге S10 блок MPU 125 камеры приводит в движение упомянутую линзу на основе величины дефокусировки (из числа вычисленных величин дефокусировки), указывающей на присутствие ближайшего объекта.
После перемещения упомянутой линзы на шаге S9 или S10 блок MPU 125 камеры продолжает обработку на шаге S11, устанавливая флаг определения в 0, и процесс обработки возвращается к шагу S3 на фиг. 1А.
Если на шаге S7 флаг определения не установлен в 1 (то есть, флаг определения установлен в 0), то блок MPU 125 камеры переходит к обработке на шаге S12. На шаге S12 блок MPU 125 камеры определяет, изменилось ли на заранее заданное или большее пороговое значение (перед или после перемещения указанной линзы) оценочное значение в области обнаружения фокуса для автофокусировки TVAF, соответствующее области обнаружения фокуса, для которой невозможно вычислить величину дефокусировки. Хотя оценочное значение фокуса в некоторых случаях возрастает, а в других случаях убывает, на шаге S12 определяют, превышает ли или равна абсолютная величина изменения оценочного значения фокуса заранее заданному пороговому значению B.
Здесь случай, когда абсолютное значение величины изменения оценочного значения фокуса больше или равно заранее заданному пороговому значению В, означает, что, хотя величину дефокусировки вычислить невозможно, можно обнаружить изменение размытого состояния объекта на основе увеличения или уменьшения оценочного значения фокуса. По этой причине в настоящем изобретении даже в том случае, когда невозможно с помощью фазоразностной AF определить величину дефокусировки, присутствие объекта определяют на основе увеличения или уменьшения оценочного значения фокуса, и процесс AF продолжается. Таким образом, регулировка фокуса может выполняться для объекта, который характеризуется большой величиной дефокусировки и не может быть обнаружен с помощью фазоразностной AF.
Здесь заранее заданное пороговое значение В, используемое при упомянутом определении, изменяется в соответствии с величиной перемещения упомянутой линзы. Если эта величина велика, то в качестве порогового значения В устанавливают большее значение, чем в случае, когда указанная величина мала. Причина этого заключается в том, что при существовании объекта величина изменения оценочного значения фокуса возрастает с ростом величины перемещения упомянутой линзы. Пороговые значения В для соответствующих величин перемещения линзы хранятся в памяти EEPROM 125с.
Если абсолютное значение величины изменения оценочного значения фокуса больше или равно пороговому значению В, то блок MPU 125 камеры переходит к обработке на шаге S13 и определяет, является ли область обнаружения фокуса, для которой величина изменения оценочного значения фокуса больше или равна пороговому значению В, единственной областью обнаружения фокуса, указывающей на присутствие объекта со стороны «фокусировки на бесконечность». Случай, когда область обнаружения фокуса указывает на присутствие объекта со стороны «фокусировки на бесконечность», относится к случаю, когда оценочное значение фокуса уменьшается при направлении перемещения объектива в сторону приближения, либо к случаю, когда оценочное значение фокуса возрастает при направлении перемещения объектива в сторону «фокусировки на бесконечность».
Если область обнаружения фокуса, для которой величина изменения оценочного значения фокуса больше или равна пороговому значению В, не является единственной областью обнаружения фокуса, указывающей на присутствие объекта со стороны «фокусировки на бесконечность», то блок MPU 125 камеры продолжает обработку на шаге S14 и приводит в движение объектив в направлении приближения на заранее заданную величину. Причина этого состоит в том, что область обнаружения фокуса, указывающая на присутствие объекта на стороне приближения, включена в область обнаружения фокуса, для которой величина изменения оценочного значения фокуса больше или равна пороговому значению В. Заметим, что причина, по которой приоритет отдается объекту, находящемуся ближе, была упомянута выше.
С другой стороны, если на шаге S13 область обнаружения фокуса, для которой величина изменения оценочного значения фокуса больше или равна пороговому значению В, является единственной областью обнаружения фокуса, указывающей на присутствие объекта со стороны «фокусировки на бесконечность», то блок MPU 125 камеры переходит к обработке на шаге S15. На шаге S15 блок MPU 125 камеры определяет, существует ли область обнаружения фокуса, для которой можно вычислить величину дефокусировки. В случае, когда область обнаружения фокуса, для которой возможно вычисление величины дефокусировки, существует (ДА на шаге S15), то отдается приоритет результату фазоразностной AF, указывающему на присутствие объекта со стороны «фокусировки на бесконечность» на основе оценочного значения фокуса, и соответственно, блок MPU 125 камеры переходит к обработке на шаге S20 (фиг. 1А).
Если область обнаружения фокуса, для которой невозможно вычисление величины дефокусировки, не существует (НЕТ на шаге S15), то информация, указывающая на присутствие объекта, относится только к изменению оценочного значения фокуса. По этой причине на шаге S16 процессор блока MPU 125 камеры приводит в движение объектив в сторону «фокусировки на бесконечность» на заранее заданную величину на основе изменения оценочного значения фокуса, после чего процесс обработки возвращается к шагу S3 на фиг. 1А.
Заранее заданную величину, на которую перемещают упомянутую линзу на шагах S14 и S16, можно определить с учетом величины дефокусировки, которую можно обнаружить с помощью фазоразностной AF. Хотя определяемая величина дефокусировки отличается в зависимости от объекта, величина перемещения объектива устанавливается заранее, с тем, чтобы предотвратить ситуацию, когда объект невозможно обнаружить, при перемещении объектива из состояния, в котором обнаружение фокуса невозможно выполнить.
Если абсолютное значение величины изменения оценочного значения фокуса меньше заранее заданного порогового значения B (НЕТ на шаге S12), то блок MPU 125 камеры переходит к обработке на шаге S17 и определяет, существует ли область обнаружения фокуса, для которой можно вычислить величину дефокусировки. Если величину дефокусировки нельзя вычислить в какой-либо из областей обнаружении фокуса, то блок MPU 125 камеры переходит к обработке на шаге S18, перемещает объектив в заранее заданную фиксированную точку, после чего переходит к обработке на шаге S19, выполняет отображение, указывающее состояние «не в фокусе» на дисплее 126 и заканчивает процесс AF. Это тот самый случай, когда отсутствует область обнаружения фокуса, для которой может быть вычислена величины дефокусировки, и отсутствует область обнаружения фокуса, оценочное значение фокуса которой изменилось перед и после перемещения упомянутой линзы. В этом случае, поскольку отсутствует информация, указывающая на наличие объекта, блок MPU 125 камеры определяет, что выполнение фокусировки невозможно, и заканчивает процесс AF.
С другой стороны, если на шаге S17 существует область обнаружения фокуса, для которой можно вычислить величину дефокусировки, то блок MPU 125 камеры переходит к обработке на шаге S20 (фиг. 1А), корректирует обнаруженную величину дефокусировки (шаги S20-S23) и перемещает фокусирующую линзу 104 в позицию «в фокусе» на шаге S24. Далее на шаге S25 блок MPU 125 камеры выполняет отображение, указывающее на состояние «в фокусе» на дисплее 126 и заканчивает процесс AF.
Способ вычисления корректирующего значения ВР по вертикали/горизонтали
Далее со ссылками на фигуры 7-8В описывается способ вычисления корректирующего значения (BP1) по вертикали/горизонтали на шаге S20 (фиг. 1А). На фиг. 7 представлена блок-схема, показывающая подробности процесса вычисления корректирующего значения (BP1) по вертикали/горизонтали.
На шаге S100 блок MPU 125 камеры получает ВР корректирующую информацию по вертикали/горизонтали. ВР корректирующая информация по вертикали/горизонтали представляет собой информацию о разности между позицией «в фокусе» в горизонтальном направлении (первое направление) и позицией «в фокусе» в вертикальном направлении (второе направление). В настоящем варианте осуществления корректирующая информация ВР по вертикали/горизонтали заранее запоминается в памяти 118 объектива в блоке 100 объектива, а блок MPU 125 камеры получает эту корректирующую информацию ВР по вертикали/горизонтали по запросу от блока MPU 127 объектива. Однако корректирующая информация ВР по вертикали/горизонтали может храниться вместе с идентификационной информацией блока объектива в энергонезависимой области RAM 125b камеры.
На фиг. 8А показан пример корректирующей информации ВР по вертикали/горизонтали. Хотя здесь показан пример корректирующей информации ВР по вертикали/горизонтали, соответствующей центральным областям 219а и 218аh обнаружения фокуса на фиг. 6, также запоминается корректирующая информация ВР по вертикали/горизонтали, соответствующая другим областям 219с, 218ch, 219b и 218bh обнаружения фокуса. Однако корректирующие значения областей обнаружения фокуса, находящихся в симметричных позициях по отношению к оптической оси оптической системы формирования изображения по сути одинаковы. Поскольку области 219с и 218ch обнаружения фокуса и области 219b и 218bh обнаружения фокуса соответственно удовлетворяют указанной симметричной взаимосвязи, в настоящем варианте осуществления может храниться корректирующая информация по вертикали/горизонтали только одной из областей обнаружения фокуса в каждой паре. Также, если корректирующее значение изменяется незначительно в зависимости от положения области обнаружения фокуса, то корректирующее значение может храниться в качестве общего значения.
В примере, показанном на фиг. 8А каждая из позиций: позиция зума (угол обзора) и позиция фокусирующей линзы (фокусное расстояние) в оптической системе формирования изображения разделена на 8 зон, и корректирующие значения BP111-BP188 хранятся для соответствующих зон. Чем больше количество разделенных зон, тем более точным будет полученное корректирующее значение, подходящее для позиции первой группы 101 линз и позиции фокусирующей линзы 104 в оптической системе формирования изображения. Также эту корректирующую информацию по вертикали/горизонтали можно будет использовать как при контрастной AF, так и фазоразностной AF.
На шаге S100 блок MPU 125 камеры получает корректирующее значение, соответствующее позиции зума и позиции фокусирующей линзы, соответствующие результату обнаружения фокуса, являющегося целью коррекции. На шаге S101 блок MPU 125 камеры определяет, были ли получены надежные результаты обнаружения фокуса как по горизонтали, так и по вертикали в области обнаружения фокуса, являющейся целью коррекции. Способ определения надежности результата обнаружения фокуса, как было описано выше, относится как к фазоразностной AF, так и к контрастной AF. Поскольку согласно настоящему варианту осуществления обнаружение фокуса выполняется только в горизонтальном направлении при фазоразностной AF, надежные результаты обнаружения фокуса в отношении горизонтального и вертикального направлений получают посредством контрастной AF. По этой причине в последующем описании, относящемся к корректирующему значению по вертикали/горизонтали, предполагается использование контрастной AF, в то время как аналогичный процесс также может выполняться и в случае выполнения обнаружения фокуса посредством фазоразностной AF как в горизонтальном, так и вертикальном направлениях. Если на шаге S101 определено, что оба результата обнаружения фокуса (в горизонтальном направлении и вертикальном направлении) надежны, то блок MPU 125 камеры переходит к обработке на шаге S102.
На шаге S102 блок MPU 125 камеры определяет, допустима ли разница в результатах обнаружения фокуса в горизонтальном направлении и в вертикальном направлении. Это выполняется для того, чтобы решить проблему смещения фокуса между дальним и ближним объектами, которое появляется, когда объекты на дальнем расстоянии и на близком расстоянии включены в область обнаружения фокуса. Например, если дальний объект имеет горизонтальный контраст, а ближний объект имеет вертикальный контраст, возможны случаи, когда абсолютное значение превышает ошибку, вызванную астигматизмом в оптической системе формирования изображения, или, когда результаты обнаружения фокуса имеют противоположные знаки. Если разность между результатом обнаружения фокуса в горизонтальном направлении и результатом обнаружения фокуса в вертикальном направлении превышает заранее заданное значение С, то блок MPU 125 камеры определяет, что эта разность неприемлема (то есть, появилось смещение фокуса). Тогда блок MPU 125 камеры выбирает горизонтальное направление или вертикальное направление в качестве направления, указывающего на результат обнаружения фокуса, то есть, в сторону приближения, и переходит к обработке на шаге S104. Заметим, что по вышеуказанной причине значение С определения может быть уникально определено как значение, значительно превышающее возможную разницу, вызванную аберрацией или т.п., либо может быть установлено с использованием корректирующей информации, полученной на шаге S100.
Если на шаге S102 определено, что разность между результатом обнаружения фокуса в горизонтальном направлении и результатом обнаружения фокуса в вертикальном направлении приемлема, то блок MPU 125 камеры выполняет переход к шагу S106.
С другой стороны, если на шаге S101 надежным результатом является единственный результат обнаружения фокуса в горизонтальном направлении или вертикальном направлении, или, если на шаге S102 выбрано только одно из направлений (горизонтальное или вертикальное), то блок MPU 125 камеры продолжает обработку на шаге S104. На шаге S104 блок MPU 125 камеры выбирает направление для результата обнаружения фокуса. Блок MPU 125 камеры при определении, относящемся к смещению фокуса, выбирает то направление, для которого вычислен надежный результат обнаружения фокуса, или то направление, для которого вычислен результат обнаружения фокуса, соответствующий объекту, относящемуся к фокусировке в сторону приближения,.
Далее на шаге S105 блок MPU 125 камеры определяет, можно ли выполнить взвешивание в горизонтальном направлении и вертикальном направлении. При выполнении шага S105, исходя из надежности оценочного значения фокуса и смещения фокуса вновь выполняется определение для вычисления корректирующего значения BP по вертикали/горизонтали, даже если не были получены надежные результаты обнаружения фокуса как в горизонтальном, так и в вертикальном направлениях. Далее со ссылками на фиг. 8В разъясняется причина подобного подхода.
На фиг. 8В представлена диаграмма, показывающая примерную зависимость между позицией фокусирующей линзы 104 в выбранной области обнаружения фокуса и оценочными значениями фокуса. Кривые E_h и E_v на фиг. 8В обозначают изменение оценочного значения фокуса по горизонтали и изменение оценочного значения фокуса по вертикали, которые обнаружены посредством контрастной AF. Обозначения LP1, LP2 и LP3 относятся к позициям фокусирующей линзы. На фиг. 8В показан случай, когда LP3 получена в качестве надежного результата обнаружения фокуса из оценочного значения E_h фокуса по горизонтали, а LP1 получена в качестве надежного результата обнаружения фокуса из оценочного значения E_v фокуса по вертикали. Определено, что появилось смещение фокуса, поскольку LP1 и LP3 значительно отличаются, и на шаге S104 выбирается результат LP3 обнаружения фокуса по горизонтали, который представляет собой результат обнаружения фокуса, относящийся к фокусировке в сторону приближения.
В этой ситуации на шаге S105 блок MPU 125 камеры определяет, имеется ли результат обнаружения фокуса по вертикали, близкий к выбранному результату LP3 обнаружения фокуса по горизонтали. Поскольку в ситуации на фиг. 8В результат LP2 имеется, блок MPU 125 камеры определяет, что можно выполнить взвешивание в горизонтальном и вертикальном направлениях, продвигает процесс обработки к шагу S106 и вычисляет корректирующее значение для результата LP3 обнаружения фокуса с учетом влияния результата LP2 обнаружения фокуса.
Положим, что в качестве корректирующей информации BP по вертикали/горизонтали на шаге S100 была получена информация BP1_B, которая является одним из элементов на фиг. 8А; оценочным значением фокуса по горизонтали для LP3 на фиг. 8В является E_hp, а оценочным значением фокуса по вертикали для LP2 является E_vp. В этом случае на шаге S106 блок MPU 125 камеры вычисляет корректирующее значение BP1 по вертикали/горизонтали в соответствии с уравнением (2), приведенным ниже, на основе отношения оценочного значения фокуса в направлении, перпендикулярном направлению, претерпевшему коррекцию, к сумме оценочных значений фокуса.
BP1=BP1_B×E_vp/(E_vp+E_hp)×(+1) (2)
Хотя корректирующее значение BP1 вычисляют с использованием уравнения (2), поскольку корректирующее значение для результата обнаружения фокуса по горизонтали вычисляется в настоящем варианте осуществления, вычисление можно выполнить, используя уравнение (3), приведенное ниже, при коррекции результата обнаружения фокуса по вертикали.
BP1=BP1_B×E_hp/(E_vp+E_hp)×(-1) (3)
Если на шаге S102 определено, что разность между результатом обнаружения фокуса по горизонтали и результатом обнаружения фокуса по вертикали приемлема, то вычисляют корректирующее значение BP1 с использованием уравнения (2) в случае, когда результат обнаружения фокуса, относящийся к фокусировке в сторону приближения, является результатом обнаружения фокуса по горизонтали, или с использованием уравнения (3) для результата обнаружения фокуса по вертикали.
Как ясно следует из уравнений (2) и (3), корректирующее значение (BP1) по вертикали/горизонтали вычисляется при определении того, что объект содержит большой объем информации о контрасте, на основе информации, указывающей, что оценочное значение фокуса велико. Как было описано выше, корректирующая информация ВР по вертикали/горизонтали представляет собой:
(позиция обнаружения фокуса для объекта, имеющего информацию о контрасте только в вертикальном направлении) - (позиция обнаружения фокуса объекта, имеющего информацию о контрасте только в горизонтальном направлении). По этой причине корректирующее значение BP1 для коррекции результата обнаружения фокуса по горизонтали и корректирующее значение BP1 для коррекции результата обнаружения фокуса по вертикали имеют противоположные знаки. После окончания обработки на шаге S106 блок MPU 125 камеры заканчивает процесс вычисления корректирующих значений BP по вертикали/горизонтали.
С другой стороны, если на шаге S105 определено, что отсутствует результат обнаружения фокуса по вертикали, близкий к выбранному результату LP3 обнаружения фокуса по горизонтали, то блок MPU 125 камеры переводит процесс обработки к шагу S103. На шаге S103 блок MPU 125 камеры определяет, что объект содержит информацию о контрасте фактически только в одном направлении, и соответственно устанавливает BP1=0, после чего процесс вычисления корректирующего значения BP по вертикали/горизонтали заканчивается.
Таким образом, согласно настоящему варианту осуществления корректирующее значение вычисляют согласно информации о контрасте объекта в разных направлениях, и, следовательно, можно вычислить корректирующее значение с большой точностью в соответствии с шаблоном объекта. Заметим, что, хотя на фиг. 8В описан случай, когда между объектами появилось смещение фокуса, корректирующее значение также вычисляется на основе аналогичного подхода, когда по каждому из направлений (горизонтальному и вертикальному) обнаружен один максимум, и один из результатов обнаружения фокуса оказывается ненадежным.
Однако способ вычисления корректирующего значения ВР на шаге S106 этим не ограничивается. Например, если обнаружение фокуса может быть выполнено только в горизонтальном направлении, как при фазоразностной AF в настоящем варианте осуществления, то корректирующее значение можно вычислить, если положить, что объем информации о контрасте объекта в горизонтальном направлении совпадает с таким же объемом в вертикальном направлении. В этом случае корректирующее значение можно вычислить путем вычитания E_hp=E_vp=1 в уравнении (2) или (3), приведенных выше. При выполнении указанной обработки точность коррекции снижается, но возможно сокращение нагрузки, связанной с вычислением корректирующего значения ВР.
Хотя выше был описан результат обнаружения фокуса посредством контрастной AF, аналогичную обработку также можно выполнить с результатом обнаружения фокуса посредством фазоразностной AF. Величину изменения корреляции, вычисленную в ходе вычисления корреляции при выполнении фазоразностной AF, можно использовать в качестве весового коэффициента при вычислении корректирующего значения ВР. В этом случае тот факт, что величина изменения корреляции тем больше, чем больше объем информации о контрасте объекта, используется в случае, когда разность между ярким и темным состоянием объекта велика, или в том случае, когда велико количество границ с большой разницей между ярким и темным состоянием. Оценочное значение не ограничивается величиной изменения корреляции и может представлять собой оценочное значение любого типа, коль скоро с его помощью можно получить аналогичную зависимость.
Таким образом, благодаря коррекции результата обнаружения фокуса с использованием корректирующего значения BP по вертикали/горизонтали можно выполнить точное обнаружение фокуса независимо от объема информации о контрасте объекта в каждом направлении. Кроме того, поскольку корректирующие значения по вертикали и горизонтали вычисляют с использованием общей корректирующей информации, такой как показана на фиг. 8А, емкость памяти, необходимой для корректирующей информации, может быть уменьшена по сравнению со случаем запоминания корректирующих значений для соответствующих направлений.
Если результаты обнаружения в фокуса в соответствующих направлениях значительно расходятся, то BP корректирующее значение по вертикали/горизонтали не вычисляется с использованием упомянутых результатов обнаружения фокуса, в связи с чем может быть уменьшено влияние смещения фокуса. Кроме того, в том случае, когда также предполагается наличие смещения фокуса, может быть выполнена более точная коррекция путем взвешивания корректирующих значений учетом того, велики или малы оценочные значения фокуса в соответствующих направлениях.
Способ вычисления корректирующего значения BP для цвета
Далее со ссылками на фигуры 9А-9С описывается способ вычисления корректирующего значения (BP2) для цвета, выполненного на шаге S21 (фиг. 1А). На фиг. 9А представлена блок-схема, показывающая подробности процесса вычисления корректирующего значения (BP2) для цвета.
На шаге S200 блок MPU 125 камеры получает корректирующую BP информацию о цвете. Корректирующая информация о цвете представляет разность между позицией «в фокусе», обнаруженной с использованием сигнала зеленого (G)? и позицией «в фокусе», обнаруженной с использованием сигналов других цветов (красного (R), синего (B)). В настоящем варианте осуществления корректирующая информация для цвета заранее запоминается в памяти 118 объектива в блоке 100 объектива, и блок MPU 125 камеры получает корректирующую информацию для цвета путем ее запроса из MPU 117 объектива. Однако корректирующая информация для цвета может храниться в энергонезависимой области RAM 125b камеры.
Чем больше количество разделенных зон, тем более точное корректирующее значение, подходящее для позиции первой группы 101 линз и позиции фокусирующей линзы 104 в оптической системы формирования изображения можно получить. Также корректирующую информацию для цвета можно использовать как при контрастной AF, так и при фазоразностной AF.
На шаге S200 блок MPU 125 камеры получает корректирующее значение, соответствующее позиции зума и позиции фокусирующей линзы, подходящее для коррекции намеченного результата обнаружения фокуса.
На шаге S201 блок MPU 125 камеры вычисляет корректирующее значение BP для цвета. Если на шаге S200 в качестве одного элемента на фиг. 9В было получено BP_R, а в качестве одного элемента на фиг. 9С было получено BP_B, то MPU 125 камеры вычисляет корректирующее значение (BP2) согласно приведенному ниже уравнению (4).
BP2=K_R×BP_R+K_B×BP_B (4)
Здесь K_R и K_B представляют собой коэффициенты для корректирующей информации соответствующих цветов. Эти коэффициенты имеют значения, коррелированные с зависимостью, характеризующейся тем, что, чем больше объемы информации о красном (R) и синем (B) по сравнению с объемом информации о зеленом (G), содержащейся в объекте, тем большее значение принимает K_R в отношении к объекту, содержащему большой объем красного цвета, и тем большее значение принимает K_B по отношению к объекту, содержащему большее количество синего цвета. Коэффициенты K_R и K_B принимают малые значения в отношении объекта, содержащего большее количество зеленого цвета. Коэффициенты K_R и K_B могут быть установлены заранее на основе репрезентативной спектральной информации об объекте. Если спектральная информация об объекте может быть обнаружена, то коэффициенты K_R и K_B можно установить в соответствии со спектральной информацией об объекте. После вычисления корректирующего значения BP для цвета на шаге S202 блок MPU 125 камеры прекращает процесс вычисление корректирующего значения BP для цвета.
Заметим, что хотя в настоящем варианте осуществления корректирующие значения хранятся в виде таблиц для соответствующих областей обнаружения фокуса, как показано на фигурах 8А, 9В и 9С, способ запоминания корректирующих значений этим не ограничивается. Например, можно использовать конфигурацию, в которой система координат установлена с точкой пересечения датчика изображения и оптической оси оптической системы формирования изображения в качестве начала отсчета, и горизонтальное и вертикальное направления устройства для съемки изображений соответственно будут совпадать с осью X и осью Y, и тогда корректирующее значение в центральных координатах области обнаружения фокуса можно получить, используя функцию от X и Y. В этом случае открывается возможность уменьшения объема информации, подлежащей хранению в виде корректирующих значений для обнаружения фокуса.
В настоящем варианте осуществления корректирующее значение, используемое при обнаружении фокуса, где вычисление выполняется с использованием BP корректирующей информации по вертикали/горизонтали или BP корректирующей информации для цвета, вычисляется в предположении, что корректирующее значение не зависит от информации о пространственной частоте, которая содержит шаблон объекта. По этой причине точная коррекция может быть выполнена без увеличения объема хранимой корректирующей информации. Однако способ вычисления корректирующего значения этим не ограничен. Как и в случае ниже описанного способа вычисления BP корректирующего значения для пространственной частоты, корректирующее значение можно вычислить в соответствии с компонентами пространственной частоты объекта с использованием BP корректирующей информации по вертикали/горизонтали или корректирующей информации для цвета в отношении каждой пространственной частоты.
Способ вычисления корректирующего значения BP для пространственной частоты
Далее со ссылками на фигуры 10А-10С описывается способ вычисления корректирующего значения (BP3) для пространственной частоты, выполняемый на шаге S22 (фиг. 1А). На фиг. 10А представлена блок-схема, показывающая подробности вычисления корректирующего значения для пространственной частоты.
На шаге S300 блок MPU 125 камеры получает корректирующую информацию для пространственной частоты. Корректирующая информация для пространственной частоты представляет информацию, касающуюся позиции формирования изображения в оптической системе формирования изображения в отношении каждой пространственной частоты объекта. В настоящем варианте осуществления корректирующая информация для пространственной частоты заранее запоминается в памяти 118 объектива в блоке 100 объектива, и MPU 125 камеры получает корректирующую информацию для пространственной частоты посредством ее запроса из MPU 117 объектива. Однако корректирующая информация для пространственной частоты может храниться в энергонезависимой области RAM 125v камеры.
Приведенная в качестве примера корректирующая информация для пространственной частоты описывается далее со ссылками на фиг. 10B, где показана модуляционная передаточная функция (MTF) дефокусировки оптической системы формирования изображения. Горизонтальная и вертикальная оси на фиг. 10B показывают позицию фокусирующей линзы 104 и интенсивность функции MTF соответственно. Четыре кривых, показанных на фиг. 10B, представляют кривые MTF применительно к соответствующим пространственным частотам и указывают на случай, когда пространственная частота изменяется от низкого значения к высокому в порядке: MTF1, MTF2, MTF3 и MTF4. Кривая MTF пространственной частоты F1 (пар линий/мм) соответствует MTF1 и аналогичным образом пространственные частоты F2, F3 и F4 (пар линий/мм) соответствуют MTF2, MTF3 и MTF4. Позиции LP4, LP5, LP6 и LP7 указывают позиции фокусирующей линзы 104 согласно с максимами соответствующих кривых MTF дефокусировки. Заметим, что запомненную BP корректирующую информацию для пространственной частоты получают посредством дискретизации кривых на фиг. 10B. В результате в настоящем варианте осуществления данные для 10 позиций фокусирующей линзы дискретизированы в отношении одной кривой MTF, а, например, 10 наборов данных хранится в виде MTF1(n) (1≤n≤10) в отношении MTF1.
Позиция зума (угол обзора) оптической системы формирования изображения и позиция фокусирующей линзы (расстояние «в фокусе») разделены на 8 зон в каждой позиции в области обнаружения фокуса, и корректирующая информация для пространственной частоты каждой зоны запоминается подобно корректирующей информации по вертикали/горизонтали и корректирующей информации для цвета. Чем больше количество разделенных зон, тем более точно можно получить корректирующее значение, подходящее для позиции первой группы 10 линз и позиции фокусирующей линзы 1104 в оптической системе формирования изображения. Также корректирующую информацию для пространственной частоты можно использовать при контрастной AF и фазоразностной AF.
На шаге S300 блок MPU 125 камеры получает корректирующее значение, соответствующее позиции зума и позиции фокусирующей линзы, подходящие для результата обнаружения фокуса, являющегося целью коррекции.
На шаге S301 блок MPU 125 камеры вычисляет полосу сигнала, используемого при выполнении контрастной AF и фазоразностной AF в области обнаружения фокуса, являющейся целью коррекции. В настоящем варианте осуществления блок MPU 125 камеры вычисляет оцененную полосу AF с учетом влияния объекта, оптической системы формирования изображения, частоты дискретизации датчика изображении цифрового фильтра, используемого при оценке. Способ вычисления оцененной полосы AF описывается ниже.
Далее на шаге S302 блок MPU 125 камеры вычисляет полосу сигнала, использованного в заснятом изображении. Как и в случае вычисления оцененной полосы AF на шаге S302, блок MPU 125 камеры вычисляет оцененную полосу заснятого изображения с учетом влияния объекта, оптической системы формирования изображения, частотных характеристик датчика изображения и оцененной полосы человека, который оценивает заснятое изображение.
Далее с использованием фигур 11А-1F описывается вычисление оцененной полосы AF (вторая оцененная полоса) и оцененной полосы заснятого изображения (первая оцененная полоса), выполненное на шагах S301 и S302. На фигурах 11А-11F показаны интенсивности в зависимости от соответствующих пространственных частот с использованием горизонтальной и вертикальной оси соответственно для пространственной частоты и интенсивности.
На фиг. 11А показана пространственная частотная характеристика (I) объекта. F1, F2, F3 и F4 на горизонтальной оси представляют собой пространственные характеристики, соответствующие кривым (MTF1 - MTF4) на фиг 10B. Nq указывает частоту Найквиста, которая определяется пиксельным шагом датчика 122 изображения. F1-F4 и Nq также подобны величинам, показанным на фигурах 11B-11F, описание которых приведено ниже. В настоящем варианте осуществления в качестве пространственной частотной характеристики (I) объекта используется репрезентативное значение, запомненное заранее. Пространственная частотная характеристика (I) объекта, которая показана на фиг. 11А непрерывной кривой, имеет дискретные значения I(n) (1≤n≤4), которые соответствуют пространственным частотам F1, F2, F3 и F4.
Хотя в настоящем варианте осуществления в качестве пространственной частотной характеристики объекта используется заранее запомненное репрезентативное значение, используемая пространственная частотная характеристика объекта может быть изменена в зависимости от объекта, для которого выполняется обнаружение фокуса. Информация о пространственной частоте (спектр мощности) объекта может быть получена посредством применения быстрого преобразования Фурье (FFT) или т.п. для сигнала снимаемого изображения. В этом случае, хотя объем вычислений возрастает, можно вычислить корректирующее значение, соответствующее объекту, для которого действительно выполняется обнаружение фокуса, и соответственно можно выполнить точное обнаружение фокуса. Проще говоря, некоторые виды частотных пространственных характеристик, запомненные заранее, могут быть эффективно использованы в зависимости от того, велика или мала контрастная информация объекта.
На фиг. 11B показана пространственная частотная характеристика «О» оптической системы формирования изображения. Эта информация может быть получена через MPU 117 объектива, либо может храниться в RAM 125b в камере. Запомненная информация может представлять собой пространственные частотные характеристики в соответствии с состояниями дефокусировки, либо может представлять собой единственную пространственную частотную характеристику в состоянии «в фокусе». Поскольку корректирующее значение для пространственной частоты вычисляют вблизи позиции «в фокусе», может быть выполнена точная коррекция с использованием пространственной частоты в состоянии «в фокусе». Однако можно выполнить более точную регулировку фокуса с использованием пространственных частотных характеристик в соответствующих состояниях дефокусировки, хотя при этом вычислительная нагрузка возрастает. Пространственная частотная характеристика в состоянии дефокусировки, подлежащая использованию, может быть выбрана с использованием величины дефокусировки, полученной с помощью фазоразностной AF.
Пространственная частотная характеристика (О) оптической системы формирования изображения, которая показана непрерывной кривой на фиг. 11B, имеет дискретные значения О(n) (1≤n≤4), соответствующие пространственным частотам F1, F2, F3 и F4.
На фиг. 11С показана пространственная частотная характеристика (L) оптического фильтра 121 нижних частот. Эта информация хранится в RAM 125b в камере. Пространственная частотная характеристика (L) оптического фильтра 121 нижних частот, которая показана непрерывной кривой на фиг. 11С, имеет дискретные значения L(n) (1≤n≤4), соответствующие пространственным частотам F1, F2, F3 и F4.
На фиг. 11D показаны пространственные частотные характеристики (M1, M2) во время создания сигнала. Как упоминалось выше, датчик изображения в настоящем варианте осуществления имеет два режима считывания. В первом режиме считывания, то есть, в режиме считывания всех пикселей, пространственная частотная характеристика при создании сигнала не изменяется, как показано под ссылочной позицией M1. С другой стороны, во втором режиме считывания, то есть, в режиме считывания с прореживанием, пространственная частотная характеристика изменяется при создании сигнала, как показано под ссылочной позицией M2. Как упоминалось выше, сигналы во время прореживания суммируются в направлении X для улучшения отношения сигнал/шум (S/N), и таким образом, возникает эффект пропускания нижних частот путем суммирования. M2 на фиг. 11D указывает пространственную частотную характеристику во время создания сигнала во втором режиме считывания. Здесь эффект пропускания нижних частот, полученный благодаря суммированию, показан без учета влияния прореживания на рассматриваемую ситуацию.
Пространственные частотные характеристики (M1, M2) во время создания сигнала, которые на фиг. 11D показаны непрерывными линиями, имеют дискретные значения M1(n) и M2(n) (1≤n≤4), соответствующие пространственным частотам, F1, F2, F3 и F4.
На фиг. 11Е показана пространственная частотная характеристика (D1), показывающая чувствительность в зависимости от каждой пространственной частоты во время оценки заснятого изображения, и пространственная частотная характеристика (D2) цифрового фильтра, используемого в процессе для оцениваемого сигнала AF. Чувствительность в отношении каждой пространственной частоты во время оценки снятого изображения зависит от индивидуальных отличий человека, который оценивает изображение, размера изображения, расстояния во время оценки изображения, окружающей среды, в которой оценивается изображение, например, яркость и т.п. В настоящем варианте осуществления в качестве репрезентативного значения устанавливается и запоминается чувствительность в отношении каждой пространственной частоты во время оценки.
С другой стороны, из-за воздействия прореживания во втором режиме считывания создается шум от наложения спектров частотных компонент сигнала. Пространственная частотная характеристика цифрового фильтра показана под ссылочной позицией D2 с учетом влияния указанного шума.
Пространственные частотные характеристики (D1) во время оценки и пространственная частотная характеристика (D2) цифрового фильтра, которые показаны непрерывными кривыми на фиг. 11Е, имеют дискретные значения D1(n) и D2(n) (1≤n≤4), соответствующие пространственным частотам F1, F2, F3 и F4.
Таким образом, благодаря запоминанию различных видов информации либо в камере, либо в объективе, блок MPU 125 камеры вычисляет оцененную полосу W1 снятого изображения и оцененную полосу W2 автофокусировки AF, опираясь на уравнения (5) и (6), приведенные ниже.
W1(n)=I(n)×O(n)×L(n)×M1(n)×D1(n) (1≤n≤4) (5)
W2(n)=I(n)×O(n)×L(n)×M2(n)×D2(n) (1≤n≤4) (6)
На фиг. 11F показано оцененная полоса W1 снятого изображения (первая оцененная полоса) и оцененная полоса W2 автофокусировки AF (вторая оцененная полоса). Путем выполнения вычисления уравнений (5) и (6) может быть количественно оценена степень влияния, которое имеют факторы, определяющие состояние «в фокусе» снятого изображения, в отношении каждой пространственной частоты. Аналогичным образом можно количественно оценить степень влияния ошибки в результатах обнаружения фокуса в отношении каждой пространственной частоты.
Информация, хранящаяся в камере, может представлять собой W1 и W2, которые вычисляют заранее. Как было описано выше, при изменении цифрового фильтра или т.п., используемого при оценке AF, корректирующее значение можно вычислить, если гибко реагировать на указанное изменение, путем выполнения вычисления каждый раз, когда выполняется коррекция. С другой стороны, если W1 и W2 запомнены заранее, объем вычислений по уравнениям (5) и (6) и емкость памяти для различных данных могут быть сокращены.
Поскольку заранее не требуется завершение всех вычислений, также можно использовать конфигурацию, в которой, например, заранее вычисляются только пространственные частотные характеристики оптической системы формирования изображения и объекта, которые запоминаются в камере, что позволяет сократить емкость памяти данных и объем вычислений.
Фигуры 11A-11F были описаны с использованием дискретных значений, соответствующих четырем пространственным частотам (F1-F4) в целях упрощения описания. Однако, увеличение количества пространственных частот, для которых хранятся данные, приведет к более точному воспроизведению пространственных частотных характеристик снятого изображения и оцененной полосы AF, вследствие чего может быть точно вычислено корректирующее значение. С другой стороны, объем вычислений можно сократить путем сокращения количества пространственных частот, подлежащих взвешиванию. Может выполняться последовательное вычисление при сохранении одной пространственной частоты, представляющей оцененную полосу снятого изображения, и одну пространственную частоту, представляющую пространственную частоту оцененной полосы AF.
Обратимся к фиг. 10А, где на шаге S303 блок MPU 125 камеры вычисляет корректирующее значение (BP3) для пространственной частоты. При вычислении корректирующего значения пространственной частоты MPU 125 камеры сначала вычисляют MTF (C1) дефокусировки снятого изображения и MTF (C2) дефокусировки сигнала обнаружения фокуса. С1 и С2, которые представляют соответственно первую и вторую информацию о позициях формирования изображения, вычисляют с использованием информации о MTF дефокусировки, полученной на шаге S300, и оцененных полосах W1 и W2, полученных на шагах S301 и S302, согласно приведенным ниже уравнениям (7) и (8), где (1≤n≤10).
С1(n)= MTF1(n)×W1(1)+MTF2(n)×W1(2)+MTF3(n)×W1(3)+MTF4(n)×W1(4) (7)
С2(n)= MTF1(n)×W2(1)+MTF2(n)×W2(2)+MTF3(n)×W2(3)+MTF4(n)×W2(4) (8)
Таким образом, информация о MTF дефокусировки, соответствующая пространственным частотам, показанным на фиг. 10В, суммируется на основе взвешивания оцененных полос снятого изображения и AF, вычисленных на шагах S301 и S302, в результате чего получают MTF (С1) дефокусировки снятого изображения и MTF (C2) дефокусировки AF. MTF дефокусировки, используемые при выполнении суммирования со взвешиванием, могут использоваться здесь после нормализации функций MTF дефокусировки с использованием максимальных значений соответствующих пространственных частот (MTF1-MTF4). Обычно максимальные значения функций MTF дефокусировки отличаются в зависимости от пространственной частоты, как показано на фиг. 10В. Соответственно, если суммирование со взвешиванием выполняется с одинаковым весом, то влияние MTF1 велико в примере на фиг. 10В. По этой причине значения функций MTF дефокусировки, относящиеся к соответствующим пространственным частотам, которые были нормализованы с использованием соответствующих максимальных значений, можно использовать для выполнения суммирования со взвешиванием.
На фиг. 10С показаны C1 и С2, представляющие собой две полученные функции MTF дефокусировки. На горизонтальной и вертикальной осях указываются позиция фокусирующей линзы 104 и значение MTF, полученное путем выполнения суммирования со взвешиванием применительно к каждой пространственной частоте. Блок MPU 125 камеры обнаруживает позицию максимума каждой кривой MTF. В качестве позиции фокусирующей линзы 104, соответствующей максимуму кривой C1, определена позиция P_img (первая позиция формирования изображения). В качестве позиции фокусирующей линзы 104, соответствующей максимуму кривой C2, определена позиция P_AF (вторая позиция формирования изображения).
На шаге S303 блок MPU 125 камеры вычисляет BP корректирующее значение (BP3) для пространственной частоты, используя приведенное ниже уравнение (9).
BP3=P_AF-P_img (9)
Используя уравнение (9), можно вычислить корректирующее значение для коррекции ошибки, которая может появиться между позицией «в фокусе» снятого изображения и позицией «в фокусе», обнаруженной посредством AF. Заметим, что, хотя разность между первой позицией формирования изображения и второй позицией формирования изображения получается здесь в виде результата сравнения первой позиции формирования изображения и второй позиции формирования изображения, возможно использование других значений, таких как отношение первой позиции формирования изображения и второй позиции формирования изображения.
Как было описано выше, позиция «в фокусе» снятого изображения изменяется в зависимости от пространственных частотных характеристик объекта, оптической системы формирования изображения и оптического фильтра нижних частот, пространственных частотных характеристик во время создания сигнала, пространственных частотных характеристик, указывающих чувствительность в отношении каждой частоты во время оценки, обработки изображения, выполняемой на снятом изображении, и т.п. В настоящем варианте осуществления позиция «в фокусе» снятого изображения может быть точно вычислена посредством возвращения назад к процессу создания снятого изображения и вычисления пространственных частотных характеристик. Например, позиция «в фокусе» снятого изображения изменяется в зависимости от размера записи снятого изображения, процесса сверхвысокого разрешения, выполняемого при обработке изображения, резкости или т.п. Кроме того, на оцененную полосу влияют размер изображения или коэффициент увеличения, с учетом которого снятое изображение оценивается после записи, расстояние, при котором оценивается снятое изображение и т.п. Позиция «в фокусе» снятого изображения изменяется путем настройки характеристик, при которой высокочастотные составляющие оцененной полосы получают тем больший вес, чем больше размер изображения и чем меньше расстояние при оценке.
С другой стороны, позиция «в фокусе», обнаруженная при выполнении AF, подобным же образом изменяется в зависимости от пространственных частотных характеристик объекта, оптической системы формирования изображения и оптического фильтра нижних частот, пространственных частотных характеристик во время создания сигнала, пространственной частоты цифрового фильтра, используемой при оценке AF и т.п. В настоящем варианте осуществления пространственные частотные характеристики вычисляют посредством возвращения к процессу создания сигнала, используемого при выполнении AF, и позиция «в фокусе», обнаруженная при AF, тогда может быть точно вычислена. Например, автофокусировка в первом режиме считывания также может быть гибко использована. В этом случае необходимо будет только вычислить весовые коэффициенты путем изменения пространственных частотных характеристик во время создания сигнала для характеристик, соответствующих первому режиме считывания.
Поскольку устройство для съемки изображения, описанное в настоящем варианте осуществления, представляет собой зеркальную камеру с одним сменным объективом, блок 100 объектива можно заменять. Если блок 100 объектива заменен, то MPU 17 объектива передает в корпус 120 камеры информацию о MTF дефокусировки, относящуюся к соответствующим пространственным характеристикам. Затем блок MPU 125 камеры вычисляет позицию «в фокусе» снятого изображения и позицию «в фокусе», обнаруженную путем использования AF, и тогда может быть точно вычислено корректирующее значение для каждого сменного объектива. Блок 100 объектива может передать в корпус 120 камеры не только информацию о MTF фокусировки, но также такую информацию, как пространственная частотная характеристика оптической системы формирования изображения. Порядок использования этой информации был описан выше.
Аналогичным образом, если заменен корпус 120 камеры, то в некоторых случаях изменяется пиксельный шаг, характеристики оптического фильтра нижних частот или т.п. Как было описано выше, в этом случае вычисляется корректирующее значение, подходящее для характеристик корпуса 120 камеры, после чего может быть выполнена точная коррекция.
Хотя в приведенном выше описании корректирующее значение вычисляется блоком MPU 125 камеры, это вычисление может выполнить MPU 117 объектива. В этом случае может быть использована конфигурация, в которой блок MPU 125 камеры передает на MPU 117 объектива информацию различного рода, которая была описана со ссылками на фигуры 11А-11F, и MPU 117 объектива вычисляет корректирующее значение, используя информацию о MTF фокусировки и т.п. В этом случае на шаге S24 (фиг. 1А) блок MPU 117 объектива должен будет только скорректировать позицию «в фокусе», переданную из блока MPU 125 камеры, и привести в движение объектив.
В настоящем варианте осуществления корректирующее значение для AF вычисляют с учетом характеристик (по вертикали/горизонтали, цвета, полосы пространственных частот) сигнала, используемого при обнаружении фокуса. По этой причине корректирующее значение может быть вычислено с использованием аналогичного способа независимо от способа AF. Поскольку способ коррекции и данные, используемые при коррекции, не обязательно должны поддерживаться для каждой системы AF, может быть сокращена емкость памяти для данных и снижена вычислительная нагрузка.
Второй вариант осуществления
Далее описывается второй вариант осуществления настоящего изобретения. Главное отличие его от первого варианта осуществления заключается в способе вычисления корректирующего значения для пространственной частоты. В первом варианте осуществления информацию о MTF дефокусировки используют в качестве значения, представляющего характеристики оптической системы формирования изображения в отношении соответствующих пространственных частот. Однако объем данных в информации о MTF дефокусировки велик, а значит, возрастают требования к емкости памяти и вычислительная нагрузка. По этой причине во втором варианте осуществления корректирующее значение для пространственной частоты вычисляют с использованием максимальной информации о MTF дефокусировки. В результате появляется возможность экономии емкости памяти 118 объектива или RAM 125b, сокращения объема обмена данными между объективом и камерой и уменьшения вычислительной нагрузки для, например, блок MPU 125 камеры.
Заметим, что блок-схема (фиг. 2) устройства для съемки изображения, схемы (фигуры 3А-5), иллюстрирующие способы обнаружения фокуса, схема (фиг. 6), иллюстрирующая области обнаружения фокуса, а также блок-схемы (фигуры 1А, 1В, 7 и 9А) процесса обнаружения фокуса и различные виды процессов вычисления корректирующего значения BP также используются в настоящем варианте осуществления. Также в этом варианте используется блок-схема (фиг. 10А) процесса вычисления BP корректирующего значения для пространственной частоты и диаграммы (фигуры 11А-11F), представляющие оцененные полосы.
Далее со ссылками на фиг. 12 описывается способ вычисления корректирующего значения (BP3) для пространственной частоты.
На шаге S300 блок MPU 125 камеры получает BP корректирующую информацию для пространственной частоты.
На фиг. 12 показаны позиции фокусирующей линзы 104, на которой функции MTF дефокусировки принимают максимальные значения применительно к соответствующим пространственным частотам, которые являются характеристиками оптической системы формирования изображения. По вертикальной оси показаны позиции LP4, LP5, LP6 и LP7 фокусирующих линз, на которых функции MTF дефокусировки достигли своих пиковых значений (максимумов) применительно к дискретным пространственным частотам F1-F4, показанным на фиг. 10В. В настоящем варианте осуществления LP4-LP7 хранятся в памяти 118 объектива или в RAM 125b в виде MTF_P(n) (1≤n≤4). Хранящаяся информация связана с позицией области обнаружения фокуса, позицией зума и позицией фокусирующей линзы, как в первом варианте осуществления.
Во втором варианте осуществления на шаге S300 при выполнении процесса вычисления корректирующего значения для пространственной частоты, показанного на фиг. 10А, блок MPU 125 камеры получает корректирующее значение, соответствующее позиции зума, и позицию фокусирующей линзы, подходящую для результата обнаружения фокуса, являющегося целью коррекции.
На шагах S301 и S302 блок MPU 125 камеры выполняет процессы, аналогичные процессам в первом варианте осуществления.
На шаге S303 блок MPU 125 камеры вычисляет корректирующее значение (BP3) для пространственной частоты. При вычислении корректирующего значения для пространственной частоты блок MPU 125 камеры сначала вычисляет позицию «в фокусе» (P_img) снятого изображения и позицию «в фокусе» (P_AF), обнаруженную посредством AF согласно приведенным ниже уравнениям (10) и (11). При вычислении используется информация об MTF дефокусировки, MTF_P(n), полученная на шаге S300, и оцененные полосы W1 и W2, полученные на шагах S301 и S302.
P_img=MTF_P(1)×W1(1)+MTF_P(2)×W1(2)+
MTF_P(3)×W1(3)+MTF_P(4)×W1(4) (10)
P_AF=MTF_P(1)×W2(1)+MTF_P(2)×W2(2)+
MTF_P(3)×W2(3)+MTF_P(4)×W2(4) (11)
Другими словами, информация MTF_P(n) о максимуме функции MTF дефокусировки в соответствии с каждой пространственной частотой, показанной на фиг. 12, подвергается суммированию с взвешиванием с использованием оцененных полос W1 и W2 снятого изображения и AF, вычисленных на шагах S301 и S302. Таким образом вычисляется позиция «в фокусе» (P_img) снятого изображения и позиция «в фокусе» (P_AF), обнаруженная с помощью AF.
Далее блок MPU 125 камеры вычисляет корректирующее значение (BP3) для пространственной частоты, как в первом варианте осуществления, с использованием приведенного ниже уравнения (9)
BP3=P_AF-P_img (9)
Заметим, что, хотя разность между первой позицией формирования изображения и второй позицией формирования изображения также получены здесь в виде примерного результата сравнения первой позиции формирования изображения и второй позиции формирования изображения, возможно использование других значений, например, отношения первой позиции формирования изображения ко второй позиции формирования изображения.
В настоящем варианте осуществления корректирующее значение ВР для пространственной частоты можно вычислить более легким способом. Хотя точность корректирующего значения для пространственной частоты в настоящем изобретении чуть меньше, чем в первом варианте осуществления, имеется возможность сократить объем информации, хранящийся для вычисления корректирующего значения ВР для пространственной частоты, уменьшить объем данных, передаваемых между объективом и камерой, и уменьшить вычислительную нагрузку на блок MPU 125 камеры.
Третий вариант осуществления
Далее описывается третий вариант осуществления настоящего изобретения. В настоящем варианте осуществления способ вычисления корректирующего значения для пространственной частоты также отличается от аналогичных способов в вышеописанных вариантах осуществления. В настоящем варианте осуществления корректирующее значение для пространственной частоты не вычисляется, когда в этом вычислении нет необходимости, что позволяет сократить объем данных, которыми обмениваются объектив, и камера и снизить вычислительную нагрузку на блок MPU 125 камеры, не снижая при этом точность корректирующего значения для пространственной частоты.
Заметим, что блок-схема (фиг. 2) устройства для съемки изображения, схемы (фигуры 3А-5), иллюстрирующие способы обнаружения фокуса, схема (фиг. 6), иллюстрирующая области обнаружения фокуса, а также блок-схемы (фигуры 1А, 1В, 7 и 9А) процесса обнаружения фокуса и различные виды процессов вычисления корректирующего значения BP также используются в настоящем варианте осуществления. Также в этом варианте используются схемы (фигуры 10В-10С), связанные с процессом вычисления корректирующего значения для пространственной частоты.
Далее со ссылками на блок-схему (фиг. 13) описывается способ вычисления корректирующего значения (BP3) для пространственной частоты в настоящем варианте осуществления. Процессы на фиг. 13, аналогичные процессам на фиг. 10А, обозначены одинаковыми ссылочными позициями, и их описание опущено.
На шаге S3000 блок MPU 125 камеры определяет, необходимо ли вычисление корректирующего значения для пространственной частоты. Как понятно из описания первого варианта осуществления, чем больше сходство между оцененной полосой W1 снятого изображения и оцененной полосой W2 автофокусировки AF, тем будет меньше корректирующее значение для пространственной частоты. По этой причине в настоящем варианте осуществления, если определено, что разница между этими двумя оцененными полосами настолько мала, что вычислять корректирующее значение для пространственной частоты нет необходимости (например, если эта разница меньше заранее определенного порогового значения), то вычисление корректирующего значения не выполняется.
В частности, вычисление указанного корректирующего значения опускается, если удовлетворяется условие, при котором разница между двумя оцененными полосами достаточно мала. Например, если сигналом, используемым в AF, также является сигнал, считанный в первом режиме, то оцененная полоса снятого изображения совпадает с оцененной полосой автофокусировки. Кроме того, при использовании (в процессах для оцененного сигнала AF) цифрового фильтра, имеющего пространственную частотную характеристику, подобную пространственной частотной характеристике, указывающей чувствительность в отношении каждой пространственной частоты во время оценки снятого изображения, пространственная частотная характеристика во время оценки совпадает с пространственной частотной характеристикой цифрового фильтра. Эта ситуация появляется в случае отображения изображения, подлежащего отображению на дисплее 126, например, в увеличенном масштабе.
Аналогичным образом положим, что оцененная полоса снятого изображения совпадает с оцененной полосой AF при создании снятого изображения с использованием сигнала, который считывается во втором режиме считывания. Эта ситуация появляется в случае, когда установлен малый размер записанного снятого изображения.
Если на шаге S3000 удовлетворяется любое из указанных заранее заданных условий, то блок MPU 125 камеры определяет, что вычисление корректирующего значения не обязательно, и переводит процесс обработки к шагу S3001.
На шаге S3001, поскольку корректирующее значение не вычислено, блок MPU 125 камеры выставляет 0 для BP3 и заканчивает процесс вычисления корректирующего значения (BP3) для пространственной частоты.
С другой стороны, если на шаге S3000 определено, что вычисление корректирующего значения необходимо, то блок MPU 125 камеры выполняет шаги S300-S303 как в первом варианте осуществления (или во втором варианте осуществления).
Поскольку в настоящем варианте осуществления опускается вычисление корректирующего значения, если определено, что в вычислении корректирующего значения для пространственной частоты нет необходимости, может быть уменьшен объем передачи данных и вычислительная нагрузка во время вычисления корректирующего значения, хотя объем данных, запоминаемых для вычисления упомянутого корректирующего значения, не может быть сокращен. Заметим, что настоящий вариант осуществления может сочетаться с вторым вариантом осуществления, и в этом случае объем передачи данных и вычислительная нагрузка во время вычисления корректирующего значения может быть дополнительно уменьшена, без уменьшения объема данных, запоминаемых для вычисления корректирующего значения.
Хотя в настоящем варианте осуществления описано, что возможно опустить вычисление корректирующего значения для пространственной частоты, также можно опустить вычисление корректирующего значения по вертикали/горизонтали и корректирующего значения для цвета, если определено, что в этих корректирующих значениях нет необходимости. Например, при выполнении обнаружения фокуса с учетом контраста по вертикали и горизонтали вычисление корректирующего значения по вертикали/горизонтали может быть опущено. Если сигнал цвета, использованный в снятом изображении, совпадает с сигналом цвета, использованным при обнаружении фокуса, то можно опустить вычисление корректирующего значения для цвета.
Другие варианты осуществления
Варианты осуществления настоящего изобретения можно также реализовать с помощью компьютера системы или устройства, которое считывает и выполняет исполняемые компьютером команды (например, одна или несколько программ), записанные в запоминающей среде (которую также можно назвать более полно «считываемой компьютером запоминающей средой долговременного хранения») для выполнения функций вышеописанных вариантов осуществления, и/или которое включает в себя одну или несколько схем (например, прикладная специализированная интегральная схема (ASIC)) для выполнения функций одного или нескольких из вышеописанных вариантов осуществления, и с помощью способа, выполняемого компьютером системы или устройством, например, путем считывания и выполнения считываемых компьютером команд из запоминающей среды для выполнения функций одного или нескольких из вышеописанных вариантов осуществления, и/или управления одной или несколькими схемами для выполнения функций одного или нескольких из вышеописанных вариантов осуществления. Упомянутый компьютер может содержать один или несколько процессоров (например, центральный процессорный блок (CPU), микропроцессорный блок (MPU)) и может включать в себя сеть отдельных компьютеров или отдельных процессоров для считывания и выполнения считываемых компьютером команд. Исполняемые компьютером команды могут быть предоставлены компьютеру, например, из сети или запоминающей среды. Запоминающая среда может включать в себя, но не только, например, один или несколько жестких дисков, память с произвольной выборкой (RAM), память только для считывания (ROM), запоминающее устройство распределенных вычислительных систем, оптический диск (такой как компакт-диск (CD), цифровой универсальный диск (DVD) или диск Blu-ray (BD)TM), устройство флэш-памяти, карта памяти и т.п.
Хотя настоящее изобретение было описано со ссылками на примерные варианты его осуществления, должно быть понятно, что изобретение не ограничено раскрытыми здесь примерными вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации, с тем чтобы включить в него все указанные модификации, эквивалентные структуры и функции.






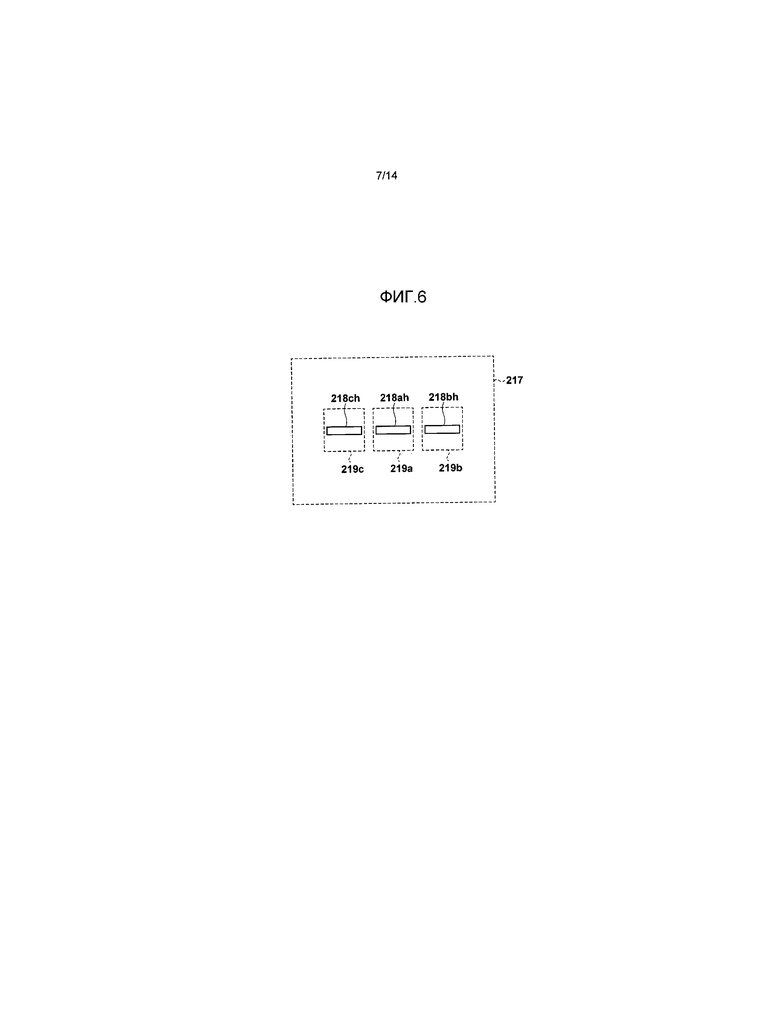




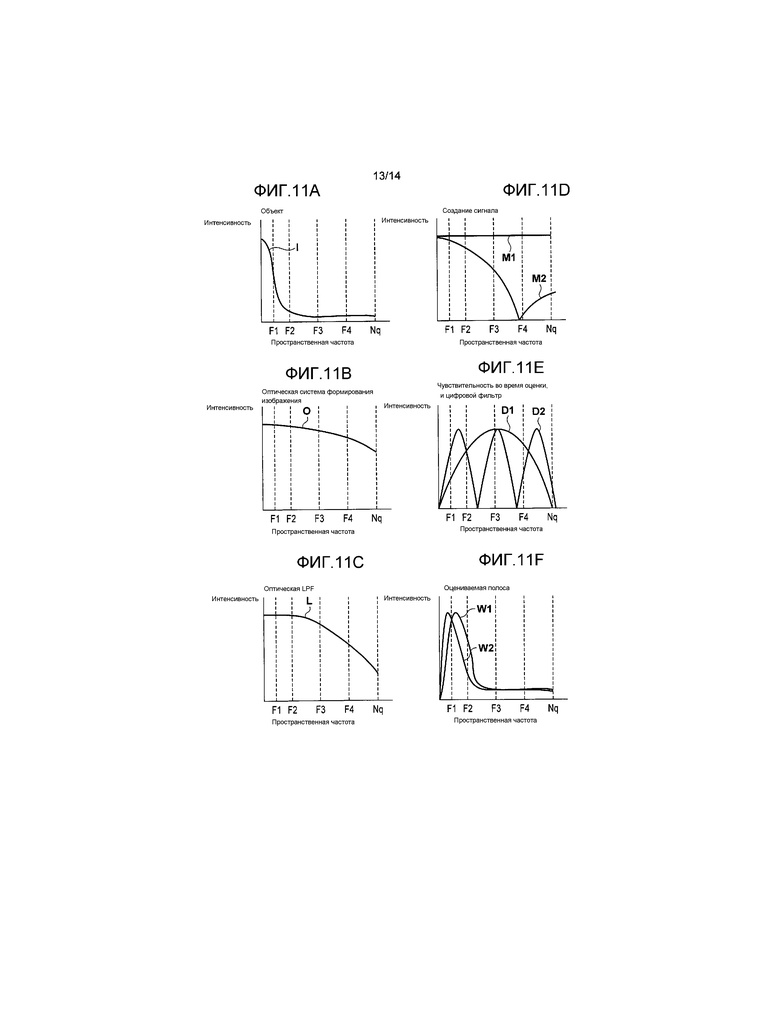

Изобретение относится к устройствам для съемки изображений. Устройство для съемки изображения выполняет автоматическое обнаружение фокуса (AF) оптической системы формирования изображения, используя сигнал, полученный от датчика изображения. Устройство содержит: первое средство сбора для получения первой информации, касающейся пространственных частот, при процессе формирования сигналов изображения, и второй информации, касающейся пространственных частот, при процессе формирования сигналов о снятом изображении; второе средство сбора для получения третьей информации, касающейся аберраций оптической системы формирования изображения; средство для коррекции результата автоматического обнаружения фокуса на основе первой, второй и третьей информаций; и средство управления позицией фокусирующей линзы, в оптической системе формирования изображения, на основе скорректированного результата автоматического обнаружения фокуса. Технический результат заключается в точной коррекции ошибки при обнаружении фокуса. 5 н. и 3 з.п. ф-лы, 26 ил.
1. Устройство для съемки изображений, способное выполнять автоматическое обнаружение фокуса (AF) оптической системы формирования изображения с использованием сигнала, полученного от датчика изображения, причем устройство содержит:
первое средство сбора для получения (i) первой информации, касающейся пространственных частот, касающихся процесса, выполняемого при формировании сигналов изображения AF, используемых при автоматическом обнаружении фокуса, и (ii) второй информации, касающейся пространственных частот, касающихся процесса, выполняемого при формировании сигналов о снятом изображении;
второе средство сбора для получения третьей информации о позициях формирования изображения оптической системы формирования изображения для разных пространственных частот; и
корректирующее средство для коррекции результата автоматического обнаружения фокуса на основе первой информации, второй информации и третьей информации;
средство управления для управления позицией фокусирующей линзы, которая имеется в оптической системе формирования изображения, на основе скорректированного результата автоматического обнаружения фокуса.
2. Устройство для съемки изображения по п. 1, в котором третья информация представляет собой информацию о множестве позиций формирования изображения, соответствующих максимальным значениям модуляционной передаточной функции (MTF), соответствующим различным пространственным частотам, соответственно.
3. Устройство для съемки изображения по п. 1, в котором корректирующее средство корректирует результат автоматического обнаружения фокуса на основе (i) позиции формирования изображения сигналов изображения AF, полученных путем вычисления с использованием третьей информации, и (ii) позиции формирования изображения сигналов о снятом изображении, полученных путем вычисления с использованием третьей информации.
4. Оптическая система формирования изображения, содержащая:
память, выполненную с возможностью хранения информации о позициях формирования изображения оптической системы формирования изображения для разных пространственных частот.
5. Оптическая система формирования изображения по п.4, в которой указанная информация представляет собой информацию о позициях формирования изображения, соответствующую максимальным значениям модуляционной передаточной функции(MTF), соответствующим разным пространственным частотам, соответственно.
6. Способ управления устройством для съемки изображений, способным выполнять автоматическое обнаружение фокуса (AF) оптической системы формирования изображения с использованием сигнала, полученного от датчика изображения, причем способ содержит этапы, при которых:
получают первую информацию, касающуюся пространственных частот, касающихся процесса, выполняемого при формировании сигналов изображения АF, используемых при автоматическом обнаружении фокуса,
получают вторую информацию, касающуюся пространственных частот, касающихся процесса, выполняемого при формировании сигналов о снятом изображении;
получают третью информацию o позициях формирования изображения оптической системы формирования изображения для разных пространственных частот; и
корректируют результат автоматического обнаружения фокуса на основе первой информации, второй информации и третьей информации;
управляют положением фокусирующей линзы, которая имеется в оптической системе формирования изображения, на основе скорректированного результата автоматического обнаружения фокуса.
7. Устройство для съемки изображений, способное выполнять автоматическое обнаружение фокуса (AF) оптической системы формирования изображения с использованием сигнала, полученного от датчика изображения, причем устройство содержит:
первое средство сбора для получения первой информации, касающейся характеристик сигналов изображения AF, используемых при автоматическом обнаружении фокуса, и второй информации, касающейся характеристик снятого изображения и которая является предварительно определенной;
второе средство сбора для получения третьей информации o позициях формирования изображения оптической системы формирования изображения для разных пространственных частот; и
корректирующее средство для коррекции результата автоматического обнаружения фокуса на основе первой информации, второй информации и третьей информации;
средство управления для управления позицией фокусирующей линзы, которая имеется в оптической системе формирования изображения, на основе скорректированного результата автоматического обнаружения фокуса.
8. Способ управления устройством для съемки изображений, способным выполнять автоматическое обнаружение фокуса (AF) оптической системы формирования изображения с использованием сигнала, полученного от датчика изображения, причем способ содержит этапы, при которых:
получают первую информацию, касающуюся характеристик сигналов изображения AF, используемых при автоматическом обнаружении фокуса, и вторую информацию, касающуюся характеристик снятого изображения и которая является предварительно определенной;
получают третью информацию o позициях формирования изображения оптической системы формирования изображения для разных пространственных частот; и
корректируют результат автоматического обнаружения фокуса на основе первой информации, второй информации и третьей информации;
управляют позицией фокусирующей линзы, которая имеется в оптической системе формирования изображения, на основе скорректированного результата автоматического обнаружения фокуса.
| US 2010194966 A1, 05.08.2010 | |||
| US 2012148109 A1, 14.06.2012 | |||
| JP 2013029656 A, 07.02.2013 | |||
| US 8184171 B2, 22.05.2012 | |||
| US 2010165175 A1, 01.07.2010. |

