Область техники, к которой относится изобретение
Изобретение относится к машине, в частности, к строительной машине, содержащей мачту, вдоль которой можно перемещать по вертикали верхний привод посредством регулирующего устройства, причем через верхний привод с возможностью перемещения проходит телескопическая буровая штанга, содержащая по меньшей мере одну внешнюю буровую трубу, сконструированную для размещения на верхнем приводе, и внутреннюю буровую трубу, содержащую канатную подвеску, выполненную с возможностью перемещения внутренней буровой трубы по вертикали посредством основной канатной лебедки, в соответствии с ограничительной частью пункта 1 формулы изобретения.
Кроме того, изобретение относится к способу проведения земляных работ с использованием машины, в частности машины по одному из пунктов 1-7 формулы, содержащей мачту, вдоль которой можно перемещать по вертикали верхний привод посредством регулирующего устройства, причем через верхний привод с возможностью перемещения проходит телескопическая буровая штанга, содержащая по меньшей мере одну внешнюю буровую трубу, сконструированную для размещения на верхнем приводе, и внутреннюю буровую трубу, содержащую канатную подвеску, выполненную с возможностью перемещения внутренней буровой трубы по вертикали посредством основной канатной лебедки, причем земляные работы выполняют землеройным инструментом, присоединенным к нижнему концу внутренней буровой трубы, в соответствии с ограничительной частью пункта 8 формулы.
Уровень техники
Буровая штанга представляет собой телескопическую штангу, выполненную из нескольких трубчатых стержневых элементов и содержащую по меньшей мере одну внешнюю буровую трубу и одну внутреннюю буровую трубу. Внутренняя буровая труба и, следовательно, буровая штанга в целом подвешена на канате, причем буровая штанга проходит через кольцевой поворотный привод, также называемый верхним приводом. Буровая штанга позволяет передавать крутящий момент на землеройный инструмент, в частности бурильный инструмент, присоединенный к нижнему концу внутренней буровой трубы. Глубину бурения можно увеличить за счет соответствующего телескопического выдвижения отдельных элементов буровой штанги.
Для передачи крутящего момента отдельные элементы буровой штанги содержат упорные планки, выступающие в осевом направлении от их внешней и внутренней стороны. Кроме того, в определенных осевых положениях, в частности в начальной и конечной области, предусмотрены фиксирующие углубления или элементы, посредством которых элементы буровой штанги могут фиксироваться друг относительно друга в осевом направлении. Таким образом, буровой привод может развивать силы осевого давления, которые могут быть приложены к буровой штанге и, тем самым, к землеройному инструменту. Внешняя буровая труба может быть жестко соединена с буровым приводом в осевом направлении.
В частности, при прерывистом выполнении земляных работ, например при бурении скважины ковшебуром, ковшебур необходимо многократно вводить в скважину и снова выводить из нее. Соответственно, в зависимости от глубины скважины буровую штангу многократно телескопически втягивают и выдвигают. Ковшебур, заполненный извлеченным грунтом, необходимо вытащить из скважины для опорожнения. Для этого следует снова втянуть отдельные элементы буровой штанги друг в друга и зафиксировать их. В таком втянутом положении буровую штангу вместе с ковшебуром можно извлечь из ствола скважины и повернуть в положение опорожнения. После этого буровой инструмент снова помещают в буровую скважину и повторно телескопически выдвигают буровую штангу для выполнения следующего этапа бурения.
Соответственно, втягивание и выдвижение буровой штанги требуют времени. При этом операторы буровых установок стремятся втягивать и выдвигать буровую штангу как можно быстрее, чтобы ускорить процесс бурения. Однако в случае слишком быстрого перемещения буровой штанги существует риск ее внезапного соприкосновения с землей или верхним приводом, что может привести к возникновению значительных напряжений в материале и даже к повреждению или разрушению верхнего привода.
Раскрытие сущности изобретения
Задачей изобретения является разработка машины и способа проведения земляных работ, отличающихся эффективностью работы и, в то же время, пониженной нагрузкой на материал и оборудование.
Указанная задача решена, с одной стороны, рабочей машиной с признаками, раскрытыми в пункте 1 формулы изобретения, и, с другой стороны, способом с признаками, раскрытыми в пункте 8 формулы. Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы.
Описываемая изобретением машина отличается наличием автоматического управляющего устройства, предназначенного для автоматического управления регулирующим устройством верхнего привода и/или основной канатной лебедки буровой штанги таким образом, чтобы внутреннюю буровую трубу можно было перемещать относительно верхнего привода в некоторых областях в режиме быстрого перемещения на первой скорости, и в некоторых областях - в режиме плавного перемещения на скорости, сниженной по сравнению с первой скоростью режима быстрого перемещения.
Основная идея изобретения заключается в автоматическом управлении перемещением элементов буровой штанги посредством управляющего устройства и выполнении этой операции таким образом, чтобы реализовать быстрое втягивание или выдвижение элементов буровой штанги в режиме быстрого перемещения в определенных областях перемещения и движение на сниженной скорости в режиме плавного перемещения в определенных критических областях перемещения. Скорость движения относится к верхнему приводу, то есть поворотному приводу, или мачте. Согласно изобретению, скорость устанавливается контроллером регулирующего устройства верхнего привода и/или (в альтернативном варианте) контроллером основной канатной лебедки буровой штанги. Регулирующее устройство верхнего привода может представлять собой подающую лебедку, гидравлический привод или другой линейный привод, например реечный привод. Описываемый изобретением контроллер обеспечивает очень быстрое телескопическое втягивание и выдвижение буровой штанги, причем быстрое перемещение осуществляется в не имеющих критического значения областях, например в центральной области элементов буровой штанги. В критических областях, например в области контакта стопорного кольца на верхнем конце внешней буровой трубы с верхним приводом или в области непосредственно перед контактом с землей землеройного инструмента, присоединенного к нижнему концу внутренней буровой трубы, контроллер переключается из режима быстрого перемещения, характеризующегося первой высокой скоростью, в режим плавного перемещения, характеризующийся пониженной скоростью. В режиме плавного перемещения скорость можно постепенно уменьшать до нулевого значения. Это позволяет предотвратить повреждающие материал удары, которые могут быть обусловлены резким контактом землеройного инструмента с землей или резким контактом внешней буровой трубы с верхним приводом. По существу, изобретение позволяет повысить эффективность работы и избежать риска повреждения инструмента, буровой штанги и буровой установки в целом.
В простейшем случае буровая штанга состоит всего из двух элементов, а именно из внешней буровой трубы и внутренней буровой трубы, установленной с возможностью перемещения в ней. Согласно изобретению, для увеличения глубины бурения буровая штанга, выгодным образом, содержит один или несколько промежуточных элементов буровой штанги, расположенных между внешней буровой трубой и внутренней буровой трубой. В частности, предпочтительно исполнение буровой штанги стремя или четырьмя элементами штанги.
По существу, описываемую изобретением машину с буровой штангой можно использовать в самых различных областях. В особенно предпочтительном варианте осуществления изобретения бурильный инструмент, в частности ковшебур или шнек, прикрепляют к нижнему концу внутренней буровой трубы с возможностью снятия. Такие буровые инструменты можно использовать для прерывистого бурения, требующего многократного втягивания и выдвижения буровой штанги. Увеличение рабочей скорости, достигаемое посредством изобретения, особенно выгодно для подобных повторяющихся процессов.
В следующем предпочтительном варианте осуществления изобретения предусмотрено по меньшей мере одно устройство ввода, позволяющее задавать тип и/или размер буровой штанги, положение регулирующего устройства верхнего привода, положение каната и/или тип, и/или размер верхнего привода. В простейшем случае данные можно вводить вручную с терминала. Кроме того, можно поместить соответствующие компоненты в определенное исходное положение и откалибровать машину с этими компонентами.
В предпочтительном варианте осуществления изобретения устройство ввода содержит по меньшей мере один датчик для автоматического ввода данных. Таким образом, тип и/или размер буровой штанги можно определить посредством соответствующих оптических датчиков автоматического обнаружения или измерения усилия на канате основной канатной лебедки. Что касается типа и/или размера верхнего привода, то, помимо ввода параметров верхнего привода, можно реализовать ряд пружинных измерений на пружинных амортизаторах, расположенных на верхней стороне верхнего привода. Положение регулирующего устройства верхнего привода и положение каната основной канатной лебедки можно автоматически определить посредством соответствующих инкрементных энкодеров или других подходящих датчиков положения. Управляющее устройство, предпочтительно, может сохранять входные значения, заданные в памяти данных.
Это полезно, например, в случае выдвижения буровой штанги и расположения землеройного инструмента в стволе скважины. После втягивания штанги и опорожнения инструмента буровую штангу можно снова выдвинуть в предыдущее положение, соответствующее сохраненным данным.
По существу, можно предусмотреть фиксированную заданную программу для автоматического контроллера. В особенно полезном варианте осуществления изобретения управляющее устройство после регулировки буровой штанги, в зависимости от ввода данных с устройства ввода, может фиксировать области, в которых предусмотрено движение в режиме быстрого или плавного перемещения. Управляющее устройство может быть выполнено, в частности, в виде адаптивного контроллера, адаптирующего моменты начала и конца режима быстрого перемещения и, соответственно, режим плавного перемещения для каждого телескопического процесса. В частности, для особенно быстрого выдвижения и втягивания элементов буровой штанги можно учитывать соответствующее положение верхнего привода на мачте и, тем самым, текущую глубину бурения. Для особо плавного перемещения элементов буровой штанги в режиме плавного перемещения предпочтителен вариант, в котором канат можно перемещать посредством основной канатной лебедки, а верхний привод - посредством регулирующего устройства одновременно и в одном направлении, чтобы уменьшить скорость в режиме плавного перемещения. Это позволяет, в частности, особенно эффективно амортизировать или предотвратить резкий контакт внешнего стопорного кольца на внешней буровой трубе с верхним приводом.
Способ, описываемый изобретением, отличается тем, что регулирующим устройством верхнего привода и/или основной канатной лебедки для буровой штанги можно управлять автоматически посредством управляющего устройства, причем внутреннюю буровую трубу перемещают относительно верхнего привода в некоторых областях в режиме быстрого перемещения на первой скорости, и в некоторых областях - в режиме плавного перемещения на скорости, сниженной по сравнению с первой скоростью режима быстрого перемещения.
Описываемый изобретением способ может быть выполнен, в частности, посредством описанной ранее машины. Соответственно, могут быть получены описанные ранее преимущества.
Перемещение буровой штанги реализовано, по существу, посредством основной канатной лебедки, закрепленной на верхнем конце внутренней буровой трубы. В одном из вариантов осуществления изобретения внутреннюю буровую трубу перемещают отдельно или вместе с другими элементами буровой штанги.
Кроме того, внешнюю буровую трубу можно перемещать независимо от внутренней буровой трубы посредством верхнего привода с регулирующим устройством.
В следующем предпочтительном варианте осуществления перемещение в плавном режиме выполняют непосредственно перед контактом буровой штанги с верхним приводом, контактом землеройного инструмента с грунтом и/или в области перехода, в которой два элемента буровой штанги втягиваются один в другой или выдвигаются один из другого. Перемещение элементов буровой штанги друг относительно друга в плавном режиме также можно реализовать в областях, в которых два фиксирующих элемента проходят один мимо другого без фиксации. Это позволяет избежать повреждения фиксирующих элементов, предназначенных для осевой фиксации элементов буровой штанги.
По существу, движение отдельных элементов буровой штанги в режиме плавного перемещения можно реализовать в любом положении при условии, что оператор буровой установки считает это положение критическим. Во всех прочих положениях можно использовать режим быстрого перемещения, чтобы, соответственно, быстро выдвигать или втягивать телескопическую буровую штангу. Области и моменты переключения между режимами быстрого и плавного перемещения можно, по существу, ввести в управляющее устройство вручную посредством устройства ввода.
В особенно выгодном варианте осуществления изобретения управляющее устройство, используя введенные значения, определяет время движения в режиме быстрого перемещения и время движения в режиме плавного перемещения. В частности, такое управление можно реализовать в зависимости от глубины скважины и положения верхнего привода относительно верхнего конца буровой штанги, то есть реализовать адаптивное управление.
В одном из предпочтительных вариантов осуществления изобретения управляющее устройство автоматически распознает введенные значения, по меньшей мере частично, посредством устройства ввода. Для этого предусмотрены соответствующие датчики или регистраторы измеренных значений, автоматически определяющие требуемые входные значения и передающие их проводным или беспроводным способом на управляющее устройство.
Краткое описание чертежей
Изобретение описано ниже на основании предпочтительных вариантов осуществления, схематично показанных на прилагаемых фигурах, на которых изображено:
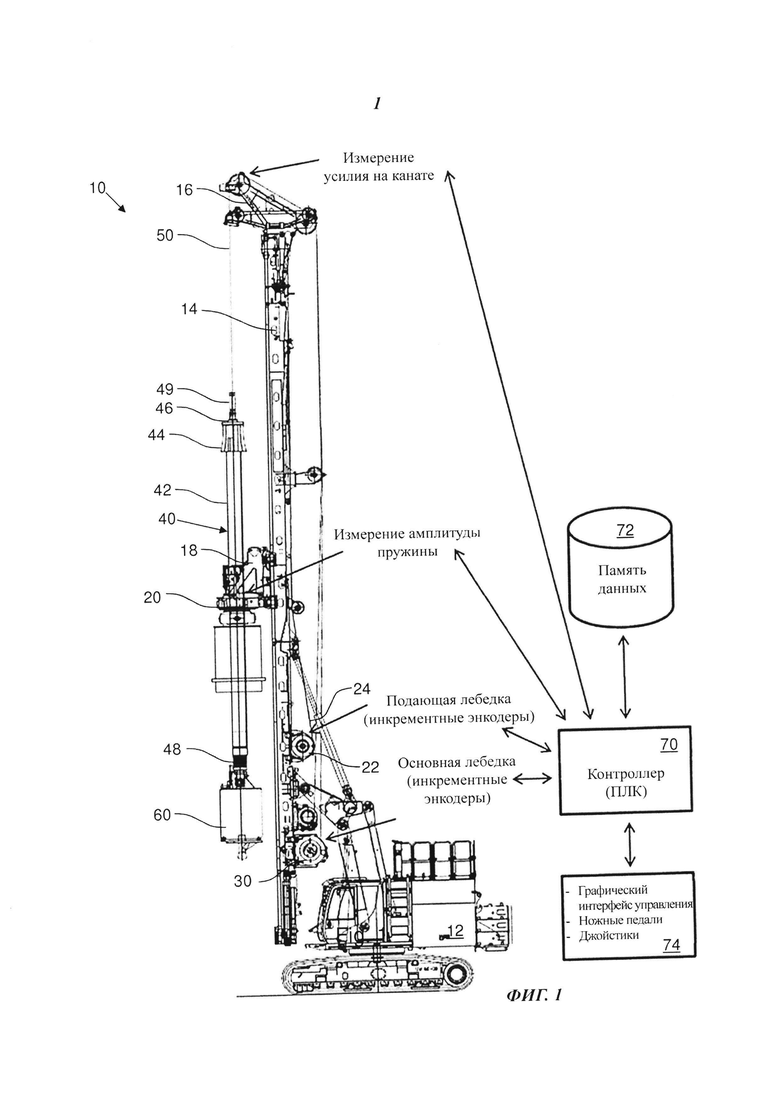
Фигура 1: схематичное изображение описываемой изобретением машины, вид сбоку.
Фигура 2: схема скоростей при опускании элемента буровой штанги.
Осуществление изобретения
Описываемая изобретением машина 10, выполненная в виде буровой установки, согласно фигуре 1 содержит несущее транспортное средство 12 с гусеничным шасси и поворотной верхней конструкцией. Вертикальная мачта 14 известным образом шарнирно соединена с несущим транспортным средством 12, причем на мачте с возможностью перемещения вдоль нее установлена каретка 18 с верхним приводом 20. Для перемещения каретки 18 предусмотрена подающая лебедка, выполненная в виде регулировочного устройства 22 и расположенная на задней стороне мачты 14. Регулирующее устройство 22 соединено с кареткой 18 ведущим канатом 24, проходящим через верхушку 16 мачты 14.
Буровая штанга 40 проходит через кольцевой верхний привод 20, будучи подвешенной на канате 50 посредством канатной подвески 49. Канат 50 проходит через верхушку 16 мачты к задней основной канатной лебедке 30.
Буровая штанга 40 содержит внешнюю буровую трубу 42 с верхним кольцом 44, диаметр которого увеличен для прилегания к верхнему приводу 20. Посредством захватывающих планок (детально не показаны) крутящий момент верхнего привода 20 можно передавать на внешнюю буровую трубу 42 и, тем самым, на буровую штангу 40. Внутри внешней буровой трубы 42 с возможностью перемещения установлена внутренняя буровая труба 46, на верхнем конце которой прикреплена канатная подвеска 49. На нижнем конце внутренней буровой трубы 46 расположена демпфирующая подушка 48, к которой с возможностью вращения прикреплен землеройный инструмент 60, выполненный в виде ковшебура.
Как показано на фигуре 1, буровая штанга 40 телескопически втянута, причем внутренняя буровая труба 46 перемещена во внутреннее пространство внешней буровой трубы 42. Телескопическое втягивание и выдвижение буровой штанги 40 выполняется автоматически посредством схематически показанного управляющего устройства 70. Оператор машины может управлять управляющим устройством 70 посредством исполнительных устройств 74, например ножных органов управления, джойстиков или графического интерфейса пользователя. Для бурения скважины канат 50 сначала опускают посредством основной канатной лебедки 30 до тех пор, пока кольцо 44 на внешней буровой трубе 42 не окажется прилегающим к верхней стороне верхнего привода 20.
Дальнейшее опускание буровой штанги 40 можно реализовать путем перемещения верхнего привода 20 посредством регулирующего устройства 22, причем верхний привод 20 перемещают вниз вдоль мачты 14 посредством каретки 18. Внешняя буровая труба 42 и внутренняя буровая труба 46 перемещаются одновременно. Внешняя буровая труба 42 может быть зафиксирована на верхнем приводе 20 и, тем самым, в осевом направлении. В качестве альтернативы или дополнения в случае неподвижного верхнего привода 20 можно дополнительно опустить канат 50 посредством основной канатной лебедки 30, причем внутренняя буровая труба 46 выходит из внешней буровой трубы 42. Посредством соответствующих инкрементных энкодеров и датчиков управляющее устройство 70 получает данные о положении верхнего привода 20, внешней буровой трубы 42 и внутренней буровой трубы 46. Кроме того, управляющее устройство 70 может запрашивать данные из памяти 72 данных, например информацию о размере и длине буровой штанги 40, размерах землеройного инструмента 60 или верхнего привода 20. В зависимости от этих данных осуществляется автоматическое управление движением буровой штанги 40 и, в частности, внутренней буровой трубы 46. По существу, элементы буровой штанги движутся в режиме быстрого перемещения на высокой первой скорости. В определенных областях перемещения, например непосредственно перед контактом кольца 44 с верхним приводом 20 или контактом землеройного инструмента 60 с землей, или в области перехода между двумя элементами буровой штанги, управляющее устройство 70 переключается из режима быстрого перемещения в режим плавного перемещения, отличающийся сниженной скоростью. Скорость можно быстро уменьшить до низкой второй скорости или, предпочтительно, постепенно до сниженной или практически нулевой скорости.
Возможная схема скоростей каната 50 с учетом глубины скважины схематично изображена на фигуре 2. Управляющее устройство 70 в точке 1 торможения инициирует переключение с максимальной скорости каната в режиме быстрого перемещения в режим плавного перемещения перед областью критического перемещения, например, при переходе между элементами буровой штанги. В плавном режиме перемещения скорость каната постепенно уменьшают с первого максимального значения до второго минимального значения. После прохождения критической области, например, прохождения фиксирующих углублений, расположенных вдоль элементов буровой штанги и, в частности, в начале и конце штанги, управляющее устройство 70 может выполнить обратное переключение в режим быстрого перемещения. Скорость каната 50 снова увеличивают до значения первой скорости в режиме быстрого перемещения.
Управляющее устройство 70 может быть выполнено в виде самообучающейся системы, причем, например, точка торможения изменяется с первой точки 1 торможения на вторую, последующую точку 2 торможения для сокращения времени движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧАЯ МАШИНА И СПОСОБ ОБРАБОТКИ ГРУНТА | 2017 |
|
RU2722612C1 |
| Установка для бурения нисходящих шпуров | 1989 |
|
SU1670113A1 |
| БУРИЛЬНО-КРАНОВАЯ МАШИНА | 2006 |
|
RU2306398C1 |
| СТРОИТЕЛЬНАЯ МАШИНА С ВЫЧИСЛИТЕЛЬНЫМ УСТРОЙСТВОМ ДЛЯ ОПРЕДЕЛЕНИЯ ДИАПАЗОНА РЕГУЛИРОВАНИЯ | 2011 |
|
RU2471981C2 |
| Агрегат подъемный для ремонта скважин АПРС-32/40 | 2019 |
|
RU2712990C1 |
| БУРОВАЯ ЭЛЕКТРОМАШИНА (ВАРИАНТЫ) | 2022 |
|
RU2793524C1 |
| МОЛОТ | 2000 |
|
RU2186175C2 |
| СТРОИТЕЛЬНАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 2013 |
|
RU2536595C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2005 |
|
RU2313650C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2005 |
|
RU2312965C2 |

Группа изобретений относится к машине и способу проведения земляных работ посредством машины, содержащей мачту, вдоль которой можно перемещать по вертикали верхний привод посредством регулирующего устройства, причем через верхний привод с возможностью перемещения проходит телескопическая буровая штанга, содержащая по меньшей мере одну внешнюю буровую трубу, сконструированную для размещения на верхнем приводе, и внутреннюю буровую трубу, содержащую канатную подвеску, выполненную с возможностью перемещения внутренней буровой трубы по вертикали посредством канатной лебедки, причем земляные работы выполняют землеройным инструментом, присоединенным к нижнему концу внутренней буровой трубы. Управляющее устройство автоматически управляет регулирующим устройством верхнего привода и/или основной канатной лебедки буровой штанги, причем внутреннюю буровую трубу перемещают относительно верхнего привода в некоторых областях в режиме быстрого перемещения с первой скоростью, и в некоторых областях - в режиме плавного перемещения со скоростью, сниженной по сравнению с первой скоростью режима быстрого перемещения. Перемещение в плавном режиме предусмотрено в области перехода, в которой два элемента буровой штанги втягиваются один в другой или выдвигаются один из другого. Обеспечивается повышение эффективности работы и исключение риска повреждения инструмента, буровой штанги и буровой установки в целом. 2 н. и 10 з.п. ф-лы, 2 ил.
1. Машина, в частности строительная машина, содержащая мачту, вдоль которой можно перемещать по вертикали верхний привод посредством регулирующего устройства, причем через верхний привод с возможностью перемещения проходит телескопическая буровая штанга, содержащая по меньшей мере одну внешнюю буровую трубу, сконструированную для размещения на верхнем приводе, и внутреннюю буровую трубу, содержащую канатную подвеску, выполненную с возможностью перемещения внутренней буровой трубы по вертикали посредством основной канатной лебедки, в которой предусмотрено автоматическое управляющее устройство, выполненное с возможностью автоматического управления регулирующим устройством верхнего привода и/или основной канатной лебедки буровой штанги таким образом, чтобы перемещать внутреннюю буровую трубу относительно верхнего привода в некоторых областях в режиме быстрого перемещения на первой скорости, и в некоторых областях - в режиме плавного перемещения на скорости, сниженной по сравнению с первой скоростью режима быстрого перемещения, отличающаяся тем, что перемещение в плавном режиме предусмотрено в области перехода, в которой два элемента буровой штанги втягиваются один в другой или выдвигаются один из другого.
2. Машина по п. 1, отличающаяся тем, что буровая штанга содержит один или несколько промежуточных элементов буровой штанги, расположенных между внешней буровой трубой и внутренней буровой трубой.
3. Машина по п. 1, отличающаяся тем, что землеройный инструмент, в частности ковшебур или шнек, прикреплен к нижнему концу внутренней буровой трубы с возможностью снятия.
4. Машина по п. 1, отличающаяся тем, что предусмотрено по меньшей мере одно устройство ввода, позволяющее задавать тип и/или размер буровой штанги, положение регулирующего устройства верхнего привода, положение каната и/или тип, и/или размер верхнего привода.
5. Машина по п. 4, отличающаяся тем, что устройство ввода содержит по меньшей мере один датчик для автоматического ввода данных.
6. Машина по п. 1, отличающаяся тем, что управляющее устройство после перемещения буровой штанги, в зависимости от ввода данных с устройства ввода, фиксирует области, в которых предусмотрено движение в режиме быстрого или плавного перемещения.
7. Машина по п. 1, отличающаяся тем, что для уменьшения скорости в режиме плавного перемещения канат можно перемещать посредством основной канатной лебедки, а верхний привод - посредством регулирующего устройства одновременно и в одном направлении.
8. Способ проведения земляных работ посредством машины, в частности, по п. 1 формулы, содержащей мачту, вдоль которой можно перемещать по вертикали верхний привод посредством регулирующего устройства, причем через верхний привод с возможностью перемещения проходит телескопическая буровая штанга, содержащая по меньшей мере одну внешнюю буровую трубу, сконструированную для размещения на верхнем приводе, и внутреннюю буровую трубу, содержащую канатную подвеску, выполненную с возможностью перемещения внутренней буровой трубы по вертикали посредством основной канатной лебедки, причем земляные работы выполняют землеройным инструментом, присоединенным к нижнему концу внутренней буровой трубы, согласно которому регулирующим устройством верхнего привода и/или основной канатной лебедки для буровой штанги управляют автоматически посредством управляющего устройства, причем внутреннюю буровую трубу перемещают относительно верхнего привода в некоторых областях в режиме быстрого перемещения с первой скоростью, и в некоторых областях - в режиме плавного перемещения, со скоростью, сниженной по сравнению с первой скоростью режима быстрого перемещения.
9. Способ по п. 8, в котором внутреннюю буровую трубу перемещают отдельно или вместе с другими элементами буровой штанги.
10. Способ по п. 8, в котором перемещение в плавном режиме выполняют непосредственно перед контактом буровой штанги с верхним приводом, контактом землеройного инструмента с грунтом и/или в области перехода, в которой два элемента буровой штанги втягиваются один в другой или выдвигаются один из другого.
11. Способ по п. 8, в котором управляющее устройство, используя введенные значения, определяет время для движения в режиме быстрого перемещения и время для движения в режиме плавного перемещения.
12. Способ по п. 11, в котором управляющее устройство автоматически распознает введенные значения, по меньшей мере частично, посредством устройства ввода.
| СТРОИТЕЛЬНАЯ МАШИНА | 2005 |
|
RU2312965C2 |
| Буровая установка | 1981 |
|
SU1002508A1 |
| СТРОИТЕЛЬНАЯ МАШИНА С МАЧТОЙ С УСТРОЙСТВОМ НАПРАВЛЕНИЯ ТРОСА | 2005 |
|
RU2312966C2 |
| СТАНОК ДЛЯ БУРЕНИЯ СКВАЖИН БОЛЬШОГО ДИАМЕТРА | 2006 |
|
RU2316638C1 |
| СТРОИТЕЛЬНАЯ МАШИНА С ВЫЧИСЛИТЕЛЬНЫМ УСТРОЙСТВОМ ДЛЯ ОПРЕДЕЛЕНИЯ ДИАПАЗОНА РЕГУЛИРОВАНИЯ | 2011 |
|
RU2471981C2 |
| US 5746277 А, 05.05.1998. | |||

