Изобретение относится к волоконно-оптической измерительной технике и может быть использовано для измерения перемещения во взрывоопасных и жестких условиях производства и эксплуатации.
Известны аналогичные датчики положения и перемещения, построенные на основе многополюсной кодирующей магнитной линейки, соединенной с объектом измерения, и считывающего модуля (магнитной головки, декодера), сопряженного через зазор с плоскостью магнитной линейки. При перемещении магнитной линейки относительно считывающего модуля или при перемещении считывающего модуля относительно магнитной линейки с выхода считывающего модуля снимаются электрические сигналы, количество, период, фаза и амплитуда которых зависят от принципа построения и формы магнитной линейки и считывающего модуля. Известны магнитные линейки (например, патент WO №2010/086585 приоритет 11.07.2011; патент US №4871624 А приоритет 11.01.1988; и др.), выпускаемые фирмами Magnescale® (каталог продукции 2015 г. ООО «ТЦ «ТочМаш» - официального дистрибьютора Magnescale Ltd., Магнитные измерительные системы, Системы цифрового считывания), Electronica Mechatronic Systems и Newall (Каталог «Устройства цифровой индикации и магнитные линейки для станков» 2016 г., "Юнисел", г. Москва),  (каталог продукции Fritz GmbH, Position and Motion Sensors, 2015), GEMAC GmbH (каталог продукции GEMAC mbH 2015 г., Magnetic Measuring Systems), Baumer (каталог продукции Baumer Electric, 2015 г. ), Balluff (Магнитные системы измерения длины, каталог продукции компании Balluff, 2016 г.) и др., которые исполняются с одно- и многодорожечными многополюсными шкалами для инкрементных и абсолютных датчиков линейного и углового перемещения и с соответствующими считывающими модулями. Структура, количество и топология чувствительных элементов в считывающих модулях определяются требуемыми точностью и стабильностью измерения. В качестве чувствительных элементов в считывающих модулях применяются магнитные сопротивления (резисторы), в том числе, гигантские магнитные сопротивления, включенные в электрическую измерительную цепь (например, патент РФ №2436037 приоритет 13.09.2010; патент US №5036276 А приоритет 5.04.1989; заявка на европейский патент №06020263.7 приоритет 27.09.2006; заявка на патент США №20150369636 приоритет 24.12.2015; патент US №7023203 В2 приоритет 15.12.2003; сообщение о НИР в НИИЯФ МГУ по госконтракту №14.513.11.0116 в рамках ФЦП «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2007 - 2013 годы»), а также датчики Холла (например, патент РФ №2312363 С1 приоритет 31.01.2006; патент US №6124710 A приоритет 13.11.1998; инкрементные магнитные датчики угла серии ЛИР-МИ137 - ЛИР-МИ208, каталог СКБ ИС, 2016; инкрементные магнитные датчики угла серии AS5030 - AS5048, AS5140 и др., каталог компании AMS AG, 2016; инкрементные и абсолютные магнитные датчики угла серии Sendix 3651, 3671 и др., каталог компании Fritz Kuebler GmbH, 2016).
(каталог продукции Fritz GmbH, Position and Motion Sensors, 2015), GEMAC GmbH (каталог продукции GEMAC mbH 2015 г., Magnetic Measuring Systems), Baumer (каталог продукции Baumer Electric, 2015 г. ), Balluff (Магнитные системы измерения длины, каталог продукции компании Balluff, 2016 г.) и др., которые исполняются с одно- и многодорожечными многополюсными шкалами для инкрементных и абсолютных датчиков линейного и углового перемещения и с соответствующими считывающими модулями. Структура, количество и топология чувствительных элементов в считывающих модулях определяются требуемыми точностью и стабильностью измерения. В качестве чувствительных элементов в считывающих модулях применяются магнитные сопротивления (резисторы), в том числе, гигантские магнитные сопротивления, включенные в электрическую измерительную цепь (например, патент РФ №2436037 приоритет 13.09.2010; патент US №5036276 А приоритет 5.04.1989; заявка на европейский патент №06020263.7 приоритет 27.09.2006; заявка на патент США №20150369636 приоритет 24.12.2015; патент US №7023203 В2 приоритет 15.12.2003; сообщение о НИР в НИИЯФ МГУ по госконтракту №14.513.11.0116 в рамках ФЦП «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2007 - 2013 годы»), а также датчики Холла (например, патент РФ №2312363 С1 приоритет 31.01.2006; патент US №6124710 A приоритет 13.11.1998; инкрементные магнитные датчики угла серии ЛИР-МИ137 - ЛИР-МИ208, каталог СКБ ИС, 2016; инкрементные магнитные датчики угла серии AS5030 - AS5048, AS5140 и др., каталог компании AMS AG, 2016; инкрементные и абсолютные магнитные датчики угла серии Sendix 3651, 3671 и др., каталог компании Fritz Kuebler GmbH, 2016).
К достоинствам таких датчиков относятся: простота конструкции, большие допуски на погрешности при монтаже; легкость монтажа, простота эксплуатации и технического обслуживания, достаточная для многих приложений точность измерений (1…25 мкм для линейных перемещений), высокое разрешение (0,5…5 мкм для линейных перемещений); высокие рабочие скорости (≥25 м/с), пыле- и маслонепроницаемость, защищенность от внешних воздействий (класс защиты IP 67 по DIN 40050), большой диапазон линейных перемещений (от нескольких сантиметров до десятков метров), относительно низкая цена.
Недостатками таких датчиков для опасных производств, жестких и опасных условий эксплуатации являются: сложность конструкции, заключающаяся в необходимости исполнения считывающего модуля в искро- взрыво- пожаробезопасном исполнении, с введением защиты от воздействия электромагнитных помех, статического электрического поля, высоковольтного напряжения и агрессивных сред, а также сложность в эксплуатации, заключающаяся в обязательной периодической проверке состояния изоляции корпуса считывающего модуля, заземляющих проводов, подводящих и отводящих токонесущих проводов.
Известны аналогичные волоконно-оптические датчики положения и перемещения, построенные на способе преобразования деформации фрагмента оптоволокна с отражающей внутриволоконной Брэгговской решеткой (ВБР) в изменение длины волны отраженного света. Например, производящийся фирмой Micron Optics Inc. датчик перемещения os5100, а также датчики, описанные в публикациях: Бусурин В.И., Носов Ю.Р. Волоконно-оптические датчики: Физические основы, вопросы расчета и применения. - М.: Энергоатомиздат, 1990. - 285 с.; Удд Э. Волоконно-оптические датчики. М.: Техносфера, 2008. - 520 с.; патент RU 2377497 приоритет 15.07.2008; патент RU 2393431 С1 приоритет 13.04.2009; патент US 7796843 В2 приоритет 21.03.2007; патент СА 2661276 А1 приоритет 16.08.2006; патент US 6854327 В2 приоритет 6.11.2002; патент US 6740866 В1 приоритет 15.06.2001; Culsha В. Fiber Optics in Sensing and Measurement, IEEE journal of selected topics in quantum electronics, Vol. 6, NO. 6, november/december 2000; Chuang K.-C, Ma C.-C. Pointwise fiber Bragg grating displacement sensor system for dynamic measurements / 2008 Optical Society of America /10 July 2008 / Vol. 47, No. 20 / Applied optics.
Указанный тип датчиков не требует электропитания, чувствительная зона датчика по существу совмещена с волоконно-оптическими линиями передачи измерительной информации. Степень воздействия условий внешней среды, электромагнитных помех, статического электрического поля, высоковольтного напряжения, агрессивных сред на такие датчики значительно ниже, чем на датчики, использующие электрическое преобразование первичной измерительной информации. Кроме того, по своим эксплуатационным характеристикам, габаритно-весовым показателям, простоте конструкции и возможности формирования сетевых мультисенсорных структур волоконно-оптические датчики на ВБР превосходят традиционные аттенюаторные волоконно-оптические аналоги, использующие другие принципы построения чувствительного элемента.
Технический результат применения датчиков на ВБР заключается в обеспечении безопасности при их эксплуатации во взрывоопасных и пожароопасных зонах за счет отсутствия гальванических элементов и цепей, и, соответственно, электрических сигналов и питающих токов в непосредственной близости от точек измерения. Кроме того, такие датчики из-за отсутствия технологических зазоров и переходов являются пылевлагонепроницаемыми, что, наряду с отсутствием гальванических элементов, существенно упрощает их эксплуатацию.
Недостатком аналогов является узкий диапазон измерения перемещения, связанный с предельным значением коэффициента допустимой линейной деформации сенсорного фрагмента стандартного одномодового кварцевого оптоволокна с ВБР (относительное линейное сжатие - до  , относительное линейное удлинение - до
, относительное линейное удлинение - до  , после превышения которого оптоволокно теряет упругие свойства и разрушается. Расширение динамического диапазона перемещения в абсолютных цифрах требует значительного увеличения длины оптического волокна с ВБР, соответственно, габаритно-весовых характеристик датчика и, например, датчик os5100 фирмы Micron Optics (проспект "Оптоволоконные системы высокоточных измерений" 2015 г.) для диапазона измерения перемещения 0-50,0 мм имеет массу 1,0 кг и габариты 152,4×76,2×44,5 мм. Альтернативный датчик перемещения на полимерном оптоволокне с ВБР обладает лишь в два раза большим значением коэффициента допустимой линейной деформации, может надежно работать на эффекте поперечного изгиба (измерение перемещения до нескольких десятков миллиметров), но при этом на удаленных расстояниях сказывается высокий уровень затухания и дисперсии сигнала, что существенно увеличивает погрешность преобразования (Madhav K.V., Semenova Y., Farrell G. Macro-bend optical fiber linear displacement sensor, Proc. SPIE 7726, Optical Sensing and Detection, 772608, May 13, 2010; Fang S., Li В., Song D., Zhang J., Sun W., Yuan L. A Smart Graded-index Multimode Fiber Based Sensor Unit for Multi-parameter Sensing Applications / Optics and Photonics Journal, 2013, 3, 265-267; Каталог продукции фирмы «Фемтотех» (Новосибирск): ВБР на основе стандартных телекоммуникационных волокон, ВБР на основе полиимидных волокон).
, после превышения которого оптоволокно теряет упругие свойства и разрушается. Расширение динамического диапазона перемещения в абсолютных цифрах требует значительного увеличения длины оптического волокна с ВБР, соответственно, габаритно-весовых характеристик датчика и, например, датчик os5100 фирмы Micron Optics (проспект "Оптоволоконные системы высокоточных измерений" 2015 г.) для диапазона измерения перемещения 0-50,0 мм имеет массу 1,0 кг и габариты 152,4×76,2×44,5 мм. Альтернативный датчик перемещения на полимерном оптоволокне с ВБР обладает лишь в два раза большим значением коэффициента допустимой линейной деформации, может надежно работать на эффекте поперечного изгиба (измерение перемещения до нескольких десятков миллиметров), но при этом на удаленных расстояниях сказывается высокий уровень затухания и дисперсии сигнала, что существенно увеличивает погрешность преобразования (Madhav K.V., Semenova Y., Farrell G. Macro-bend optical fiber linear displacement sensor, Proc. SPIE 7726, Optical Sensing and Detection, 772608, May 13, 2010; Fang S., Li В., Song D., Zhang J., Sun W., Yuan L. A Smart Graded-index Multimode Fiber Based Sensor Unit for Multi-parameter Sensing Applications / Optics and Photonics Journal, 2013, 3, 265-267; Каталог продукции фирмы «Фемтотех» (Новосибирск): ВБР на основе стандартных телекоммуникационных волокон, ВБР на основе полиимидных волокон).
Известны датчики перемещения и положения, построенные на эффекте магнитострикции (Уорден, К. Новые интеллектуальные материалы и конструкции: свойства и применение / Пер. с англ. под ред. С.Л. Баженова. - М.: Техносфера, 2006. - 223 с.), который представляет собой, например, изменение длины стержня из магнитострикционного материала под воздействием магнитного поля. Этот эффект является симметричным относительно приложенного поля, с дисторсией (деформацией) только в одном направлении, независимо от формы магнитного поля.
Известен аналогичный датчик скорости (патент US 5394488, приоритет 30.11.1993), в котором применен магнитострикционный элемент с прикрепленным к нему фрагментом оптоволокна с ВБР. При прохождении перемещающегося магнитного или электромагнитного элемента вблизи магнитострикционного элемента с фрагментом оптоволокна с ВБР происходит растяжение магнитострикционного элемента и скрепленного с ним фрагмента оптоволокна с ВБР. При этом изменяется длина волны отраженного от ВБР света, что позволяет фиксировать и подсчитывать за определенный промежуток времени количество моментов, когда изменяется длина волны отраженного светового потока.
Недостатком аналога является ограничение функциональных возможностей фрагмента оптоволокна с ВБР, используемого только для определения скорости перемещения по количеству полных оборотов вала за некоторый промежуток времени без определения параметров девиации скорости вращения в пределах одного оборота.
Известен аналогичный бесконтактный датчик вибрации вала (Yuegang Т.; Li W., Zude Z. A non-contact fiber Bragg grating vibration sensor, Review of Scientific Instruments / Volume:85, Issue: 1, Jan 2014, P.: 015002 - 015002-7), в котором через воздушный зазор осуществляется магнитное взаимодействие между вибрирующим магнитным валом и магнитной диафрагмой, к которой прикреплен фрагмент оптоволокна с ВБР. В процессе вращения вала вибрация приводит к изменению зазора, соответственно изменяется длина волны отраженного от ВБР света, что позволяет определять частоту и амплитуду вибрации.
Недостатком аналога является ограничение функциональных возможностей датчика, используемого только для определения параметров вибрации в аналоговой форме, требующей для последующей обработки и коррекции измерительных данных аналого-цифрового преобразования в удаленном оптико-электронном блоке-интеррогаторе.
Наиболее близким по своей алгоритмической сущности и по конструктивному исполнению устройством в качестве прототипа выбран волоконно-оптический датчик положения (патент RU 2413178 С2, приоритет 17.05.2005). Датчик содержит магнитный или электромагнитный элемент, широкополосный источник света, оптическое волокно, по меньшей мере, два сенсора в виде внутриволоконной Брэгговской решетки (ВБР), по меньшей мере, один сегмент из магнитострикционного материала, стержень, изготовленный из материала, непроницаемого для магнитных полей. По меньшей мере, один из двух сенсоров прикреплен к сегменту из магнитострикционного материала, при этом, по меньшей мере, один из сегментов магнитострикционного материала прикреплен к стержню. Магнитный или электромагнитный элемент и стержень совмещены таким образом, что они могут испытывать относительное смещение только вдоль оси стержня. Указанное смещение вызывает изменение размеров элемента из магнитострикционного материала и закрепленного на нем фрагмента оптоволокна с сенсором на ВБР, что приводит к изменениям длины световой волны, отражаемой ВБР.
Так как температура представляет собой фактор, который также может вызывать изменения длины волны ВБР, то в датчике используют, по меньшей мере, два фрагмента оптоволокна с ВБР, при этом второй фрагмент может не крепиться к элементу из магнитострикционного материала. Введение второго фрагмента оптоволокна с ВБР позволяет согласно прототипу производить необходимую компенсацию влияния температуры посредством предварительной температурной калибровки.
Особенностью и ключевым признаком прототипа является типовой базовый модуль, позволяющий создавать составной датчик положения на большие перемещения, содержащий от одного до N модулей, каждый из которых рассчитан на преобразование перемещения в диапазоне от 0 до 10-20 мм. Каждый типовой j-й модуль содержит как минимум два сенсора - положения и температурный (корректирующий), настроенных на длины волн λj1 и λj2, причем λj1≠λj2. При создании многомодульного датчика положения, имеющего расширенный динамический диапазон измерения, можно исключать оптические соединительные элементы. Кроме того, при широкополосном источнике излучения имеется возможность подключения посредством этого же волокна других датчиков с ВБР, настроенных на другие длины волн.
Устройство-прототип имеет следующие недостатки.
1. Низкая функциональная эффективность использования ВБР, связанная с тем, что для расширения динамического диапазона в N раз требуется соответствующее, в N раз, увеличение количества сенсорных модулей, в том числе сегментов ОВ с N, 2N или 3N ВБР в зависимости от варианта исполнения. В результате, например, на один датчик положения в диапазоне линейного перемещения от 0 до 20-25 см может потребоваться от 10 до 30 ВБР длиной 10…30 мм и расстоянием между ними 10-15 мм.
2. Сложность и громоздкость конструкции, которые возрастают по мере расширения диапазона измерения из-за увеличения количества модулей, которые необходимо согласовывать между собой и с интеррогатором, осуществляющим преобразование длин волн оптических сигналов, отраженных группой ВБР, в цифровые коды, привязанные к шкале перемещения (положения).
3. Сложность эксплуатации, связанная с тем, что при длительной работе датчика необходимо периодически проводить температурную калибровку каждого модуля, что требует привлечения определенных временных и вычислительных ресурсов.
4. Наличие функциональных и конструкционных ограничений, накладываемых конечными минимальными размерами фрагмента оптического волокна с ВБР (для короткопериодической решетки длина фрагмента равна ≥10 мм) и использованием магнитострикционных материалов с максимальным коэффициентом относительного линейного удлинения  . Наибольшие изменения линейных размеров достижимы у магнитных эластомеров и сильномагнитных материалов на основе некоторых редкоземельных элементов. Их относительное удлинение
. Наибольшие изменения линейных размеров достижимы у магнитных эластомеров и сильномагнитных материалов на основе некоторых редкоземельных элементов. Их относительное удлинение  варьируется в пределах до 10-2 (предельно допустимое линейная деформация оптоволокна), что требует применение различных алгоритмов масштабирования. Кроме того, при изменении линейных размеров элемента из магнитострикционного материала под воздействием внешних сил и внутренних состояний его магнитные свойства существенно изменяются (эффект Виллари), что приводит к росту погрешности преобразования перемещения (положения) без специальной калибровки до величины 2-2,5% с калибровкой - ≥1,2% (Удд Э. Волоконно-оптические датчики. - М.: Техносфера, 2008. - 520 с., Гавричев В.Д., Дмитриев А.Л. Волоконно-оптические датчики магнитного поля / Учебное пособие. - СПб: СПбНИУ ИТМО, 2013. - 83 с.).
варьируется в пределах до 10-2 (предельно допустимое линейная деформация оптоволокна), что требует применение различных алгоритмов масштабирования. Кроме того, при изменении линейных размеров элемента из магнитострикционного материала под воздействием внешних сил и внутренних состояний его магнитные свойства существенно изменяются (эффект Виллари), что приводит к росту погрешности преобразования перемещения (положения) без специальной калибровки до величины 2-2,5% с калибровкой - ≥1,2% (Удд Э. Волоконно-оптические датчики. - М.: Техносфера, 2008. - 520 с., Гавричев В.Д., Дмитриев А.Л. Волоконно-оптические датчики магнитного поля / Учебное пособие. - СПб: СПбНИУ ИТМО, 2013. - 83 с.).
5. Необходимость осуществления аналого-цифрового преобразования центральной длины волны и ширины спектра оптических сигналов, отраженных от ВБР, причем разрешающая способность и точность преобразования определяются как нелинейностью функции отклика магнитострикционного материала и нелинейными искажениями оптического сигнала в участке оптического волокна между ВБР и удаленным интеррогатором, так и техническими характеристиками интеррогатора. При этом для получения цифрового кода перемещения в большом диапазоне значений необходима калибровка и аналого-цифровое преобразование изменения максимумов от 10 до 30 различных длин волн отраженных сигналов. Следует учитывать относительно высокую стоимость изготовления одной ВБР (от 2000 до 5000 рублей в зависимости от используемого метода изготовления, параметров решетки и точности ее исполнения). В результате с увеличением динамического диапазона измеряемого перемещения стоимость одного датчика будет существенно возрастать.
6. Высокая чувствительность датчика к изменению расстояния z между магнитострикционным элементом и плоскостью движения, перемещающегося относительно его магнита, что приводит к значительной дополнительной инструментальной погрешности вследствие виброударных воздействий на направляющие перемещения. Для коррекции этой погрешности необходимо реализовывать различные методы и средства, например, введения дополнительного канала измерения параметров виброударных воздействий, построенного на основе отдельного сенсорного модуля, сопряженного с неподвижным дополнительным магнитом, привязанным к плоскости перемещающегося магнита.
Заявляемое устройство лишено этих недостатков.
Технический результат заключается в расширении технических возможностей путем увеличения диапазона измерения перемещения, повышения точности и стабильности процесса измерения, получения цифрового кода перемещения непосредственно в считывающем модуле датчика.
Сущность изобретения заключается в том, что цифровой волоконно-оптический датчик перемещения, содержащий: магнитный или электромагнитный элемент, широкополосный источник света, оптическое волокно, по меньшей мере два датчика в виде внутриволоконной Брэгговской решетки, изготовленные из оптического волокна, по меньшей мере один сегмент магнитострикционного материала, стержень, изготовленный из материала, непроницаемого для магнитных полей, причем по меньшей мере один из двух датчиков прикреплен к сегменту магнитострикционного материала, при этом по меньшей мере один из сегментов магнитострикционного материала прикреплен к стержню, причем магнитный или электромагнитный элемент и стержень совмещены таким образом, что они могут испытывать относительное смещение только вдоль оси стержня, причем указанное смещение вызывает изменение размеров сегмента магнитострикционного материала, что приводит к изменениям длины волны, отражаемой датчиками в виде внутриволоконной Брэгговской решетки, причем в него введены многополюсная кодирующая магнитная линейка и считывающий модуль в виде корпуса из немагнитного материала с направляющим пазом, участок оптического волокна, содержащий по меньшей мере два датчика в виде внутриволоконной Брэгговской решетки, настроенных на разные длины волн, и жестко соединенные с ними по меньшей мере два идентичных магниточувствительных элемента, расположенные в направляющем пазу, многополюсная кодирующая магнитная линейка соединена с объектом измерения и содержит две параллельно расположенные вдоль координаты перемещения периодические структуры из магнитных профилированных элементов с периодом следования элементов а0, линейной шириной элементов а0/2, высотой элементов  , где
, где  - длина внутриволоконной Брэгговской решетки, вторая периодическая структура сдвинута относительно первой периодической структуры по координате перемещения на величину a0/4, первый и второй датчики в виде внутриволоконной Брэгговской решетки и жестко соединенные с ними соответственно первый и второй магниточувствительные элементы заключены в направляющий паз корпуса считывающего модуля, имеющий форму прямой линии, ориентированной перпендикулярно координате перемещения и плоскости многополюсной кодирующей магнитной линейки, фрагменты участка оптического волокна, не содержащие датчики в виде внутриволоконной Брэгговской решетки, жестко закреплены в корпусе считывающего модуля, при этом при перемещении многополюсной кодирующей магнитной линейки относительно считывающего модуля обеспечивается изменение с периодом а0 длины волны отраженных от по меньшей мере первого и второго датчиков в виде внутриволоконной Брэгговской решетки, причем взаимное смещение первой и второй периодических структур на величину a0/4 обеспечивает реверсивный подсчет количества перемещающихся профилированных участков кодирующей магнитной линейки относительно модуля считывания при обработке оптических сигналов от внутриволоконных Брэгговских решеток; а многополюсная кодирующая магнитная линейка содержит одну периодическую структуру из магнитных профилированных элементов с периодом следования элементов а0, линейной шириной элементов a=a0/2≥dOB и высотой b≥dOB, где dOB - диаметр оптического волокна с внутриволоконной Брэгговской решеткой, а паз в корпусе считывающего модуля выполнен в форме дуги, плоскость которой ориентирована таким образом, чтобы обеспечивать размещение в нем участка оптического волокна с первым и вторым датчиками в виде внутриволоконной Брэгговской решетки и жестко соединенными с ними первым и вторым магниточувствительными элементами соответственно на расстоянии между оптическими осями указанных датчиков по координате перемещения равном ka0+a0/4, где k=0, 1, 2…; причем многополюсная кодирующая магнитная линейка выполнена в форме n-разрядной цифровой шкалы, корпус считывающего модуля содержит паз выполненный в форме линии, ориентированной параллельно плоскости многополюсной кодирующей магнитной линейки и перпендикулярно координате ее перемещения, а участок оптического волокна, размещенный в пазу, содержит по меньшей мере n датчиков в виде внутриволоконных Брэгговских решеток, настроенных на разные длины волн, и n магниточувствительных элементов, жестко соединенных с соответствующими датчиками в виде внутриволоконных Брэгговских решеток.
- длина внутриволоконной Брэгговской решетки, вторая периодическая структура сдвинута относительно первой периодической структуры по координате перемещения на величину a0/4, первый и второй датчики в виде внутриволоконной Брэгговской решетки и жестко соединенные с ними соответственно первый и второй магниточувствительные элементы заключены в направляющий паз корпуса считывающего модуля, имеющий форму прямой линии, ориентированной перпендикулярно координате перемещения и плоскости многополюсной кодирующей магнитной линейки, фрагменты участка оптического волокна, не содержащие датчики в виде внутриволоконной Брэгговской решетки, жестко закреплены в корпусе считывающего модуля, при этом при перемещении многополюсной кодирующей магнитной линейки относительно считывающего модуля обеспечивается изменение с периодом а0 длины волны отраженных от по меньшей мере первого и второго датчиков в виде внутриволоконной Брэгговской решетки, причем взаимное смещение первой и второй периодических структур на величину a0/4 обеспечивает реверсивный подсчет количества перемещающихся профилированных участков кодирующей магнитной линейки относительно модуля считывания при обработке оптических сигналов от внутриволоконных Брэгговских решеток; а многополюсная кодирующая магнитная линейка содержит одну периодическую структуру из магнитных профилированных элементов с периодом следования элементов а0, линейной шириной элементов a=a0/2≥dOB и высотой b≥dOB, где dOB - диаметр оптического волокна с внутриволоконной Брэгговской решеткой, а паз в корпусе считывающего модуля выполнен в форме дуги, плоскость которой ориентирована таким образом, чтобы обеспечивать размещение в нем участка оптического волокна с первым и вторым датчиками в виде внутриволоконной Брэгговской решетки и жестко соединенными с ними первым и вторым магниточувствительными элементами соответственно на расстоянии между оптическими осями указанных датчиков по координате перемещения равном ka0+a0/4, где k=0, 1, 2…; причем многополюсная кодирующая магнитная линейка выполнена в форме n-разрядной цифровой шкалы, корпус считывающего модуля содержит паз выполненный в форме линии, ориентированной параллельно плоскости многополюсной кодирующей магнитной линейки и перпендикулярно координате ее перемещения, а участок оптического волокна, размещенный в пазу, содержит по меньшей мере n датчиков в виде внутриволоконных Брэгговских решеток, настроенных на разные длины волн, и n магниточувствительных элементов, жестко соединенных с соответствующими датчиками в виде внутриволоконных Брэгговских решеток.
Отличительные признаки изобретения состоят в том, что в нем изменена структура датчика перемещения с введением новых элементов по сравнению с прототипом и изменением связи между ними.
Сравнение заявляемого устройства с прототипом и другими техническими решениями показывает, что при осуществлении отличительных признаков-оно приобретает новые свойства, которых нет в них. Следовательно, отличительные признаки являются существенными.
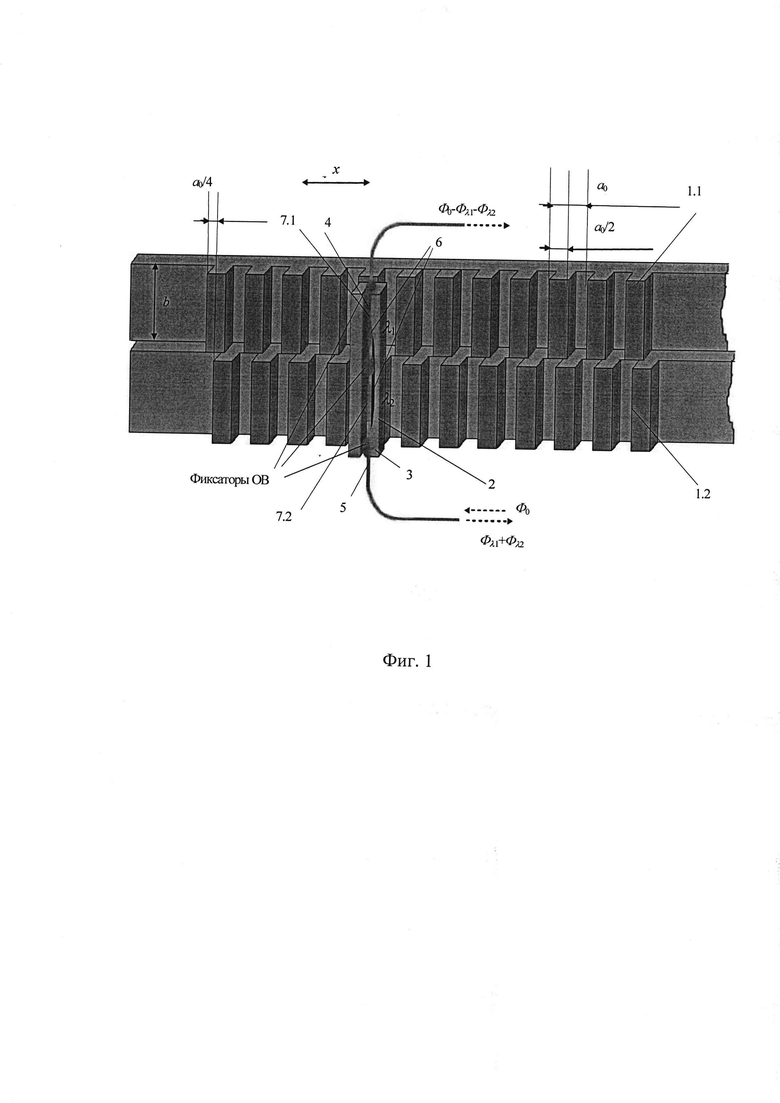
Графические материалы заявки содержат: фиг. 1 - структурная схема цифрового инкрементного волоконно-оптического датчика перемещения с многополюсной кодирующей магнитной линейкой на основе двух периодических структур; фиг. 2 - структурная схема модели перемещения многополюсной кодирующей магнитной линейки относительно магниточувствительного считывающего элемента; фиг. 3 - эпюра сигнала перемещения при реализации модели перемещения многополюсной кодирующей магнитной линейки относительно магниточувствительного считывающего элемента; фиг. 4 - эпюры сигналов цифровых инкрементных волоконно-оптических датчиков перемещения; фиг. 5 - структурная схема цифрового инкрементного волоконно-оптического датчика перемещения с многополюсной кодирующей магнитной линейкой на основе одной периодической структуры; фиг. 6 - структурная схема цифрового абсолютного волоконно-оптического датчика перемещения.
Заявляемый по пункту 1 цифровой инкрементный волоконно-оптический датчик перемещения, изображенный на фиг. 1, содержит многополюсную кодирующую магнитную линейку 1 на основе двух периодических структур 1.1 и 1.2 и считывающий модуль 2, включающий корпус 3 с пазом 4, в котором размещается участок оптического волокна 5 с фрагментами, содержащими внутриволоконные Брэгговские решетки (ВБР) 6, по меньшей мере две из которых жестко соединены с магниточувствительными элементами 7. Минимальное количество магниточувствительных элементов 7 равно двум (7.1 и 7.2), что соответствует количеству периодических структур многополюсной кодирующей магнитной линейки 1 (1.1. и 1.2). Другие фрагменты участка оптического волокна 5 с ВБР 6, которые не имеют соединений с магниточувствительными элементами 7, предназначены для реализации в интеррогаторе температурной калибровки датчика и коррекции температурной погрешности в процессе преобразования перемещения. Фрагменты участка оптического волокна 5, размещенного в пазу 4, не содержащие ВБР, жестко закреплены в корпусе 3 считывающего модуля 2 таким образом, чтобы обеспечивать свободную деформацию и взаимонезависимое изменение длины всех фрагментов участка оптического волокна 5 с ВБР 6, в том числе жестко соединенных с ними магниточувствительных элементов 7, в пределах, достаточных для индикации в интеррогаторе изменения длины волны ВБР в заданном диапазоне с заданной точностью и не приводящих к деградации и обрывам оптического волокна. В качестве крепежного средства может использоваться клей (например, ЦМК-5) или механические крепежные детали. В качестве магниточувствительного элемента может применяться: пластина из магниточувствительного материала; конструкция из одного или двух субэлементов, выполненных из магниточувствительного материала и прикрепленных тем или иным способом к одному или двум краям фрагмента оптоволокна с ВБР; тонкопленочное покрытие в форме оболочки из магниточувствительного материала, сформированной тем или иным способом на фрагменте оптического волокна с ВБР, предварительно очищенном от буферного покрытия и др.
В качестве магниточувствительного материала для изготовления считывающего элемента датчика могут применяться постоянные магниты, магнитострикционные материалы, в том числе магнитные эластомеры, и любые другие вещества, взаимодействующие с постоянным магнитным полем.
Геометрические размеры элементов и датчика в целом, изображенного на фиг. 1, определяются способом измерения и диапазоном перемещения, длиной участка оптического волокна 5 с ВБР 6, расстояниями между ВБР, обеспечивающими взаимонезависимую деформацию фрагментов участка оптического волокна 5 с ВБР 6 и магниточувствительными элементами 7, а также предельной разрешающей способностью, обеспечиваемой способом считывания и возможной минимальной толщиной участков оптического волокна 5 с ВБР 6 и магниточувствительными элементами 7.
Для описания механизма изменения центральной длины волны света, отраженного от ВБР при перемещении многополюсной кодирующей магнитной линейки, разработаны модель и компьютерная программа dip15 численного исследования взаимодействия профилированных магнитов многополюсной кодирующей магнитной линейки с профилированным магниточувствительным элементом, совмещенным с участком оптического волокна с ВБР. Программа позволяет подбирать и рассчитывать элементы, а также уточнять параметры многополюсной кодирующей магнитной линейки и считывающего модуля.
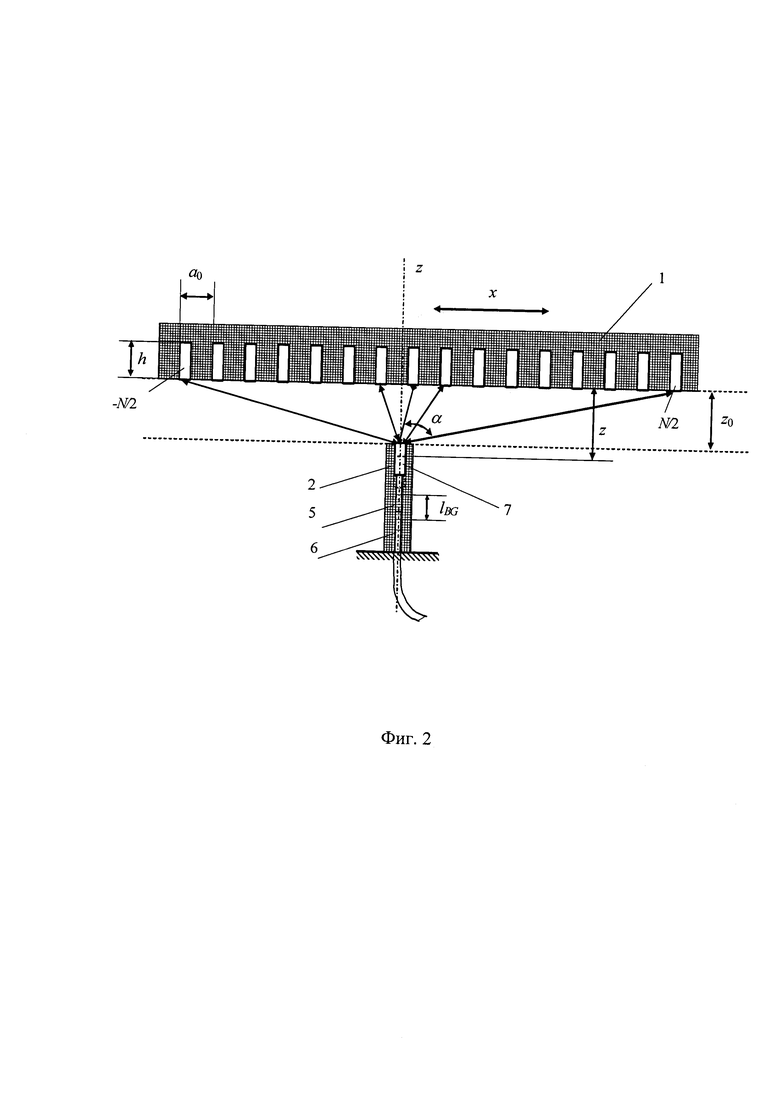
В качестве примера моделирования датчика линейного перемещения на фиг. 2 представлена структурная схема модели перемещения многополюсной кодирующей магнитной линейки относительно магниточувствительного считывающего элемента. В соответствии со схемой датчик работает следующим образом. При перемещении многополюсной кодирующей магнитной линейки 1 из набора N цилиндрических постоянных магнитов относительно считывающего модуля 2, содержащего цилиндрический магнит 7, закрепленный на конце участка оптоволокна 5 с ВБР 6, или при перемещении считывающего модуля 2 относительно многополюсной кодирующей магнитной линейки 1 осуществляется магнитное взаимодействие между элементами многополюсной кодирующей магнитной линейки 1 и попадающим в формируемые ими магнитными полями магнитом 7, жестко соединенным с участком оптического волокна 5 в месте расположения измерительной ВБР 6. В результате взаимодействия группы элементов перемещающейся многополюсной кодирующей магнитной линейки и считывающего модуля происходит функционально привязанная к перемещению х деформация  фрагмента оптического волокна с ВБР и соответствующие изменения длины волны отраженного от нее света.
фрагмента оптического волокна с ВБР и соответствующие изменения длины волны отраженного от нее света.
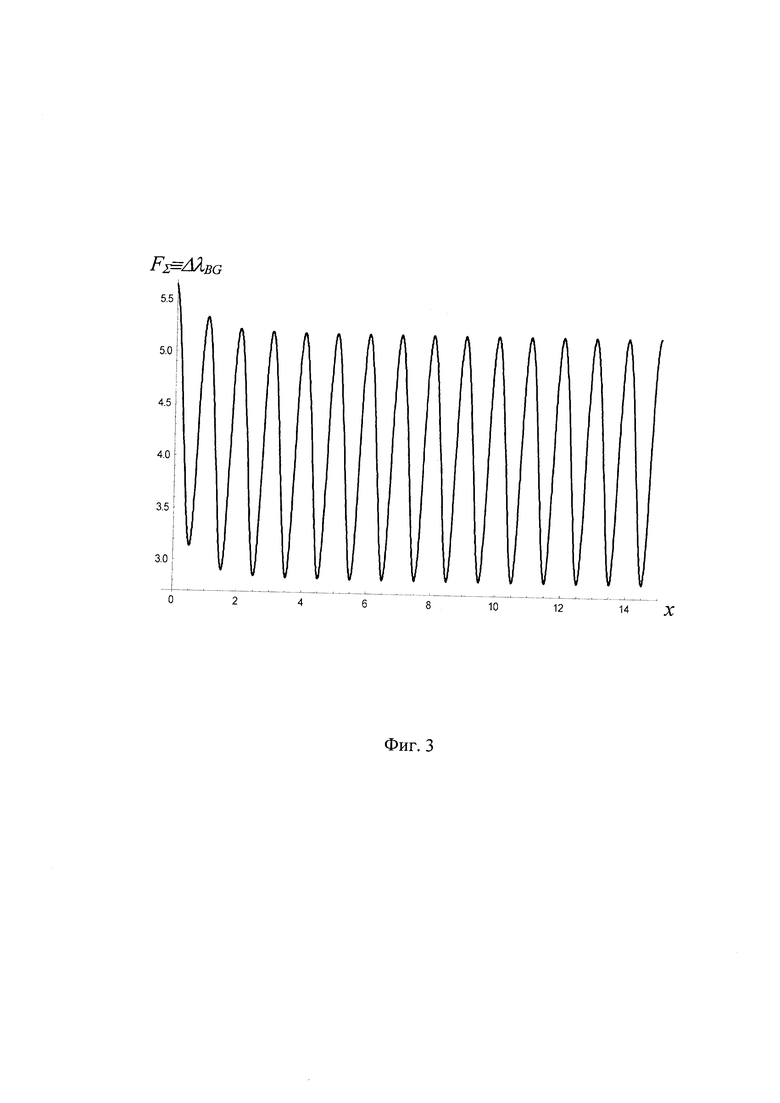
Суммарную силу FΣ взаимодействия между магнитом, закрепленном на участке оптоволокне с ВБР, и N цилиндрическими магнитами в составе перемещающейся вдоль оси х линейки можно представить с использованием упрощенной модели взаимодействия магнитных диполей [Браун У. Ф., Микромагнетизм, пер. с англ., М., 1979]:



В формулах (1-3): m - магнитный момент магнита на многополюсной кодирующей магнитной линейке, m0 - магнитный момент магнита на оптоволокне с ВБР, z - расстояние от многополюсной кодирующей магнитной линейки до магнита на оптоволокне; а0 - период следования магнитных диполей на многополюсной магнитной линейке; FΣ - сила магнитного взаимодействия между магнитом, закрепленном на оптоволокне, и магнитной линейкой; ν - потенциальная энергия взаимодействия магнита, закрепленного на оптоволокне и магнитной линейкой.
На фиг. 3 приведена эпюра изменения суммарной силы магнитного взаимодействия при перемещении х многополюсной кодирующей магнитной линейки относительно магнита, закрепленного на участке оптоволокна с ВБР. При реализации модели заданы следующие параметры: N=250; m=1; m0=1; радиусы магнита на многополюсной кодирующей магнитной линейке и магнита на оптоволокне R0=Rmν=0,25⋅10-3 м соответственно; длина магнита на линейке и длина магнита на оптоволокне h=3⋅10-3 м; радиус оптоволокна с защитными покрытиями Rν=0,1⋅10-3 м; длина участка оптоволокна с ВБР  ; модуль Юнга для кварцевого стекла Yν=73⋅109 МПа; расстояние между магнитами на линейке а0=0,5⋅10-3 м; минимальное расстояние от линейки до магнита, закрепленного на участке оптоволокна с ВБР (технологический зазор) z0=0,5⋅10-3 м; максимально и минимально допустимое относительное удлинение участка оптического волокна с ВБР при максимальной силе FΣmax магнитного взаимодействия:
; модуль Юнга для кварцевого стекла Yν=73⋅109 МПа; расстояние между магнитами на линейке а0=0,5⋅10-3 м; минимальное расстояние от линейки до магнита, закрепленного на участке оптоволокна с ВБР (технологический зазор) z0=0,5⋅10-3 м; максимально и минимально допустимое относительное удлинение участка оптического волокна с ВБР при максимальной силе FΣmax магнитного взаимодействия:  и
и  соответственно.
соответственно.
В процессе моделирования определено, что при максимальном значении силы магнитного взаимодействия FΣmax=6500 Н относительное удлинение равно  при технологическом зазоре z0=10-3м. Уменьшение допустимого технологического зазора между магнитом на оптоволокне и линейкой до z0=10-4 м и минимального допустимого относительного удлинения оптоволокна
при технологическом зазоре z0=10-3м. Уменьшение допустимого технологического зазора между магнитом на оптоволокне и линейкой до z0=10-4 м и минимального допустимого относительного удлинения оптоволокна  уменьшает требуемое максимальное значение силы взаимодействия до FΣmax=89,8 Н. Это дает возможность существенно снизить намагниченность и габариты элементов магнитной линейки и магниточувствительного элемента считывающего модуля.
уменьшает требуемое максимальное значение силы взаимодействия до FΣmax=89,8 Н. Это дает возможность существенно снизить намагниченность и габариты элементов магнитной линейки и магниточувствительного элемента считывающего модуля.
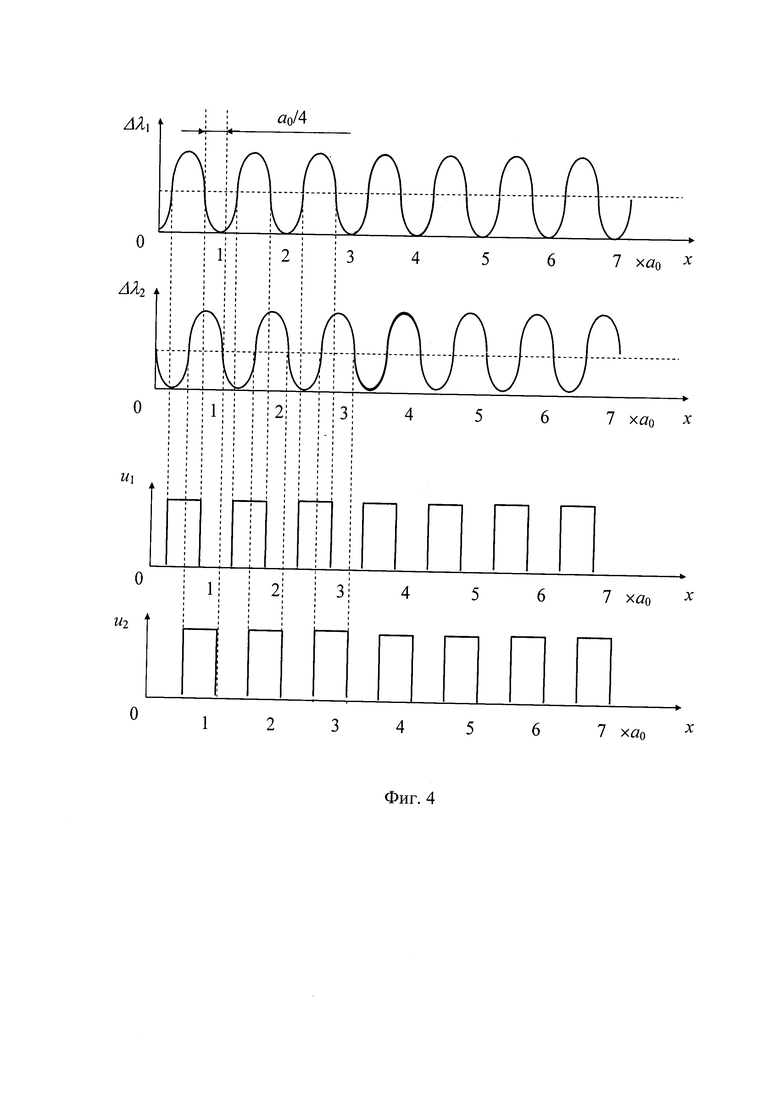
На фиг. 4 показаны эпюры сигналов при перемещении первой 1.1 и второй 1.2 периодических структур многополюсной кодирующей магнитной линейки 1 относительно линии считывания, которая в соответствии со схемой, приведенной на фиг. 1, задается положением оптического волокна 5 в пазе 4 корпуса 3 считывающего элемента 2. От первой и второй ВБР отражаются соответственно два модулированных по длине волны оптических сигнала (фиг. 4а) с одинаковым пространственным периодом a0, которые смещены друг относительно друга на величину а0/4 по координате перемещения. Взаимный сдвиг первой 1.1 и второй 1.2 периодических структур многополюсной кодирующей магнитной линейки 1 на величину а0/4 по координате х перемещения позволяет в процессе последующего оптоэлектронного преобразования в интеррогаторе и обработки позиционных сигналов получить из двух оптических два электрических сигнала в форме меандра (фиг. 4б), из которых получается цифровой код перемещения с использованием способа инкрементного преобразования с определением направления перемещения без дополнительной калибровки и аналого-цифрового преобразования [Домрачев В.Г. Схемотехника цифровых преобразователей перемещений: справоч. пособ. / В.Г. Домрачев, В.Р. Матвеевский, Ю.С. Смирнов. - М.: Энергоатомиздат, 1987].
Поскольку температурный дрейф обеих ВБР, выполненных на общем коротком участке оптического волокна на минимальном удалении друг от друга, практически одинаковый, то для такого датчика достаточно введения одной корректирующей ВБР для компенсации температурной погрешности, с применением известных методов и алгоритмов автокоррекции инструментальных погрешностей. Также к такому типу датчиков можно применить известные способы, алгоритмы и средства коррекции других инструментальных погрешностей. (Земельман, М.А. Автоматическая коррекция погрешностей измерительных устройств / М.: Издательство стандартов, 1972 - 200 с., Аш Ж. и др. Датчики измерительных систем: В двух книгах. Кн. 1 // Пер. с франц. М.: Мир, 1992. 480 с., Леонович, Г.И. Оптоэлектронные цифровые датчики перемещений для жестких условий эксплуатации. /Самара: Самарск. гос. аэрокосм, ун-т, 1998. - 256 с., Домрачеев, В.Г. Мейко Б.С. Цифровые преобразователи угла: принципы построения, теория точности, методы контроля./ М.: Энергоатомиздат, 1984. - 328 с.). В зависимости от форм и соотношения величин геометрических параметров полюсов кодирующей магнитной линейки и магниточувствительных элементов сигналы могут иметь форму меандра, треугольника, трапецеидальную или близкую к синусоиде. При треугольной или синусоидальной формах сигналов для увеличения разрешающей способности можно применять известные методы и простые технические средства интерполяции и обработки сигналов (Гречишников В.М. Конюхов Н.Е. Оптоэлектронные цифровые датчики перемещений со встроенными волоконно-оптическими линиями связи. / М.: Энергоатомиздат, 1992. - 160 с.).
Заявляемый по пункту 2 цифровой инкрементный волоконно-оптический датчик перемещения, изображенный на фиг. 5, содержит многополюсную кодирующую магнитную линейку 1 из одной периодической структуры и считывающий модуль 2, включающий корпус 3 с U-образным пазом 4, в котором размещается участок оптического волокна 5 с фрагментами, содержащими внутриволоконные Брэгговские решетки (ВБР) 6, по меньшей мере две из которых жестко соединены с магниточувствительными элементами 7. Минимальное количество магниточувствительных элементов 7 равно двум (7.1 и 7.2), которые расположены вдоль оси перемещения многополюсной кодирующей магнитной линейки таким образом, чтобы расстояние между их центрами было равно a=ja0+a0/4, где - период следования полюсов многополюсной кодирующей магнитной линейки, j=1, 2, 3… Другие фрагменты участка оптического волокна 5 с ВБР 6, которые не имеют соединений с магниточувствительными элементами 7, предназначены для реализации в интеррогаторе температурной калибровки датчика и коррекции температурной погрешности в процессе преобразования перемещения. Фрагменты участка оптического волокна 5, размещенного в U-образном пазу 4, не содержащие ВБР, жестко закреплены в корпусе 3 считывающего модуля 2 таким образом, чтобы обеспечивать свободную деформацию и взаимонезависимое изменение длины всех фрагментов участка оптического волокна 5 с ВБР 6, в том числе жестко соединенных с ними магниточувствительных элементов 7, в пределах, достаточных для индикации в интеррогаторе изменения длины волны ВБР в заданном диапазоне с заданной точностью и не приводящих к деградации и обрывам оптического волокна. В качестве крепежного средства может использоваться клей (например, ЦМК-5) или механические крепежные детали. В качестве магниточувствительного элемента может применяться: пластина из магниточувствительного материала; конструкция из одного или двух субэлементов, выполненных из магниточувствительного материала и прикрепленных тем или иным способом к одному или двум краям фрагмента оптоволокна с ВБР; тонкопленочное покрытие в форме оболочки из магниточувствительного материала, сформированной тем или иным способом на фрагменте оптического волокна с ВБР, предварительно очищенном от буферного покрытия и др.
Датчик, изображенный на фиг. 5, работает следующим образом. При перемещении многополюсной кодирующей магнитной линейки 1 относительно считывающего модуля 2 или при перемещении считывающего модуля 2 относительно многополюсной кодирующей магнитной линейки 1 осуществляется силовое взаимодействие между профилированными элементами многополюсной кодирующей магнитной линейки 1 и магниточувствительными элементами 7.1 и 7.2 жестко соединенными с оптическим волокном в местах расположения измерительных ВБР 6. В результате этого взаимодействия происходит деформация ВБР и соответствующее изменение длины волны отраженного от нее света. Перемещение периодической структуры многополюсной кодирующей магнитной линейки 1 относительно двух линий считывания, которые задаются положением магниточувствительных элементов 7.1 и 7.2 относительно оси перемещения многополюсной кодирующей магнитной линейки 1, отображается в виде двух модулированных по длине волны оптических сигналов с одинаковым периодом a0 и пространственно смещенных друг относительно друга на величину а0/4 (см. фиг. 4, а, б). Пространственное смещение а0/4 в направлении перемещения многополюсной кодирующей магнитной линейки позволяет в процессе последующего оптоэлектронного преобразования и обработки сигналов в интеррогаторе определить направление перемещения. Расположение участков оптоволокна с ВБР 6 перпендикулярно плоскости многополюсной кодирующей магнитной линейки 1 позволяет уменьшить размеры элементов многополюсной кодирующей магнитной линейки до величины, соответствующей ширине канала U-образного паза 4. Кроме того, поскольку температурный дрейф обеих ВБР, выполненных на общем оптическом волокне на минимальном удалении друг от друга, практически одинаковый, то для такого датчика достаточно введения одной корректирующей ВБР для компенсации температурной погрешности, с применением известных методов и алгоритмов автокоррекции инструментальных погрешностей. В зависимости от соотношения между линейными размерами полюсов кодирующей магнитной линейки и магниточувствительных элементов сигналы могут иметь форму меандра, треугольника, трапецеидальную или близкую к синусоиде. При треугольной или синусоидальной формах сигналов для увеличения разрешающей способности можно применять известные методы интерполяции и обработки сигналов (Аш Ж. и др. Датчики измерительных систем: В двух книгах. Кн. 1 // Пер. с франц. М.: Мир, 1992. 480 с, Домрачев В.Г. Схемотехника цифровых преобразователей перемещений: справоч. пособ. / В.Г. Домрачев, В.Р. Матвеевский, Ю.С. Смирнов. - М.: Энергоатомиздат, 1987, Леонович).
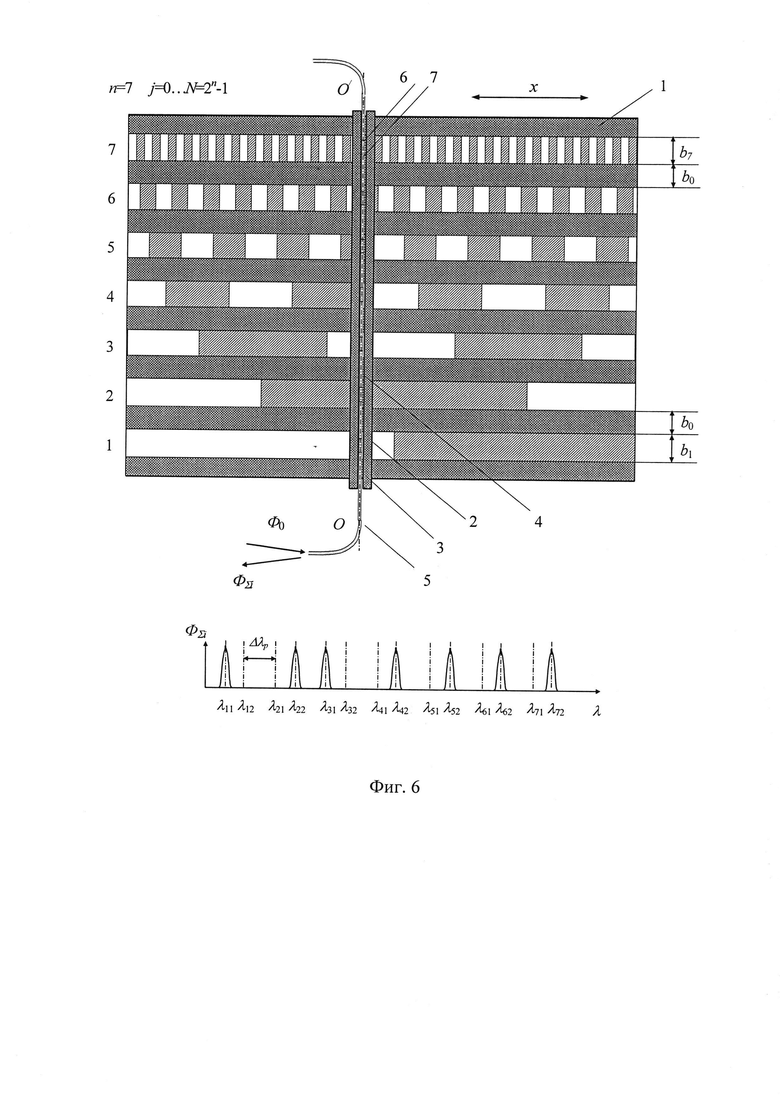
Заявляемый по пункту 3 цифровой абсолютный волоконно-оптический датчик перемещения, изображенный на фиг. 6, содержит многополюсную кодирующую магнитную линейку 1 из n периодических структур и считывающий модуль 2, включающий корпус 3 с пазом 4, в котором размещается участок оптического волокна 5 с внутриволоконными Брэгговскими решетками 6, часть из которых жестко соединена с магниточувствительными элементами 7. Минимальное количество магниточувствительных элементов 7 равно n, что соответствует количеству периодических структур кодирующей магнитной линейки. Другие ВБР 6 которые не имеют жестких соединений с магниточувствительными элементами 7, предназначены для реализации в интеррогаторе калибровки датчика и коррекции температурной погрешности преобразования перемещения. Фрагменты участка оптического волокна 5, размещенного в пазу 4, не содержащие ВБР, жестко закреплены в корпусе 3 считывающего модуля 2 таким образом, например, перпендикулярно оси перемещения х (по оси OO/), чтобы обеспечивать независимую друг от друга свободную деформацию и изменение длины фрагментов с ВБР 6 и жестко соединенных с ними магниточувствительных элементов 7 в пределах, достаточных для индикации в интеррогаторе изменения длины волны в заданном диапазоне с заданной точностью и не приводящих к деградации и обрывам оптического волокна. В качестве крепежного средства может использоваться клей (например, ЦМК-5) или механические крепежные детали. В качестве магниточувствительного элемента может применяться: пластина из магнитострикционного материала; пластина из упругого диэлектрического материала, на которую нанесено магниточувствительное покрытие; тонкопленочное магниточувствительное покрытие, нанесенное на участок оптического волокна с ВБР, очищенный от буферного покрытия.
Датчик, изображенный на фиг. 6, работает следующим образом. В оптическое волокно из интеррогатора подается широкополосный оптический импульс, содержащий минимум 2n спектральных составляющих, длины волн которых попарно соответствуют длинам волн n ВБР при наличии (λBGi1) и отсутствии (λBGi2) магнитного воздействия. От i-го (i=1…n) ВБР-элемента отражается сигнал только с той центральной длиной волны λBGi1 или λBGi2, на которые настроен соответствующий разряд с учетом магнитного и температурного воздействия. В результате на выходе оптического разветвителя формируется суммарный оптический сигнал, который в упрощенном виде можно выразить как:
 ,
,
где n - количество разрядов (разрядных дорожек многополюсной кодирующей магнитной линейки и считывающих элементов), Ф0 - широкополосный прямоугольный импульс, подаваемый на вход датчика перемещения; ki{λi[Fi(х)]} - функция отклика считывающего i-го ВБР-элемента; λi[Fi(х)] - длина волны i-го ВБР-элемента, зависящая от силы магнитного воздействия с перемещающейся по оси х i-й дорожки многополюсной кодирующей магнитной линейки.
Расстояние между соседними разрядами кода перемещения по шкале длины волны Δλp выбирается исходя из параметров максимального температурного дрейфа и максимального изменения длины волны при магнитном взаимодействии, например, в соответствии с выражением  . Значение ΔλBG(T)max рассчитывается в заданном диапазоне рабочих температур по формуле, одинаковой для всех однотипных считывающих элементов: ΔλBG(Т)=0,01 нм/К°.
. Значение ΔλBG(T)max рассчитывается в заданном диапазоне рабочих температур по формуле, одинаковой для всех однотипных считывающих элементов: ΔλBG(Т)=0,01 нм/К°.
Заявляемый цифровой волоконно-оптический датчик по пунктам 1, 2 и 3 в вариантах исполнения, изображенных на фиг. 1, 5 и 6 соответственно, независимо от диапазона измеряемого перемещения, всегда содержит простой в исполнении оптомагнитный подвижный или стационарный считывающий модуль, в состав которого входят минимум два (для инкрементных датчиков) или n (для абсолютных датчиков) магниточувствительных элементов на основе внутриволоконной Брэгговской решетки (ВБР). Для повышения точности измерения перемещения количество ВБР и магниточувствительных элементов может быть увеличено в соответствии с известными методами статистической и функциональной коррекции инструментальных погрешностей (Земельман М.А. Автоматическая коррекция погрешностей измерительных устройств. -М.: Издательство стандартов, 1972. - 200 с., Домрачев В.Г., Мейко Б.С. Цифровые преобразователи угла: принципы построения, теория точности, методы контроля. - М.: Энергоатомиздат, 1984. - 328 с., Леонович Г.И. Оптоэлектронные цифровые датчики перемещений для жестких условий эксплуатации. - Самара: Изд-во СГАУ, 1998. 264 с.).
Многополюсная кодирующая магнитная линейка может иметь различные формы, в том числе для измерения однокоординатных линейных и угловых перемещений. В соответствии с формой и видом многополюсной кодирующей магнитной линейки выполняется считывающий модуль.
Например, в варианте, когда многополюсная кодирующая магнитная линейка 1 имеет форму кольца или сектора кольца в виде n+1-разрядной кодовой шкалы Грея, заявляемое устройство является n-разрядным абсолютным датчиком углового положения с автокоррекцией погрешности считывания, возникающей при существенных перекосах и вибрации считывающего модуля в форме вытянутого параллелепипеда относительно многополюсной кодирующей магнитной линейки. Для компенсации температурной погрешности достаточно введения одного дополнительного ВБР-элемента.
Таким образом, заявленный цифровой волоконно-оптический датчик существенно превосходит аналоги и прототип по параметрам простоты исполнения, компактности и устойчивости к механическим дестабилизирующим факторам, что особенно важно при их применении в жестких условиях эксплуатации на больших удалениях от интеррогатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2022 |
|
RU2813169C1 |
| ОПТОВОЛОКОННЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2023 |
|
RU2823908C1 |
| Способ изготовления образца изо льда с внедренными волоконно-оптическими датчиками | 2022 |
|
RU2794868C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК НАПРЯЖЕННОСТИ ЭЛЕКТРИЧЕСКОГО ПОЛЯ | 2019 |
|
RU2724099C1 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ВЕРТИКАЛЬНОГО ТЕМПЕРАТУРНОГО РАЗРЕЗА В ВОДНОЙ СРЕДЕ | 2023 |
|
RU2822208C1 |
| Способ и волоконный чувствительный элемент для определения тепловых характеристик веществ (жидкостей и газов) | 2022 |
|
RU2804474C1 |
| Устройство и способ измерения спектральных характеристик волоконно-оптических брэгговских решеток | 2018 |
|
RU2700736C1 |
| Устройство для измерения наведенного тока в мостике накаливания электрического средства инициирования | 2024 |
|
RU2831340C1 |
| СИСТЕМА НА ОСНОВЕ ВЫНУЖДЕННОГО РАССЕЯНИЯ МАНДЕЛЬШТАМА-БРИЛЛЮЭНА С МНОЖЕСТВОМ ВБР | 2010 |
|
RU2511066C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ИЗНОСА И ТЕМПЕРАТУРЫ ИЗДЕЛИЯ ПРИ ТРЕНИИ (ВАРИАНТЫ) | 2016 |
|
RU2631082C1 |

Изобретение относится к волоконно-оптической измерительной технике и может быть использовано для измерения перемещения во взрывоопасных и жестких условиях производства и эксплуатации. Устройство содержит многополюсную кодирующую магнитную линейку (МПКМЛ), сопряженную с объектом измерения, и считывающий модуль. Считывающий модуль содержит считывающие элементы, выполненные на основе участков оптического волокна с несколькими внутриволоконными Брэгговскими решетками (ВБР), настроенными на разные длины волн и имеющими профилированное магниточувствительное покрытие или постоянные магниты, жестко закрепленные на границах участков оптоволокна с ВБР. При перемещении МПКМЛ относительно считывающего модуля происходит вызванная магнитным взаимодействием деформация локальных участков оптоволокна с ВБР. Это приводит к изменению длин волн соответствующих ВБР относительно исходного значения. Количество считывающих элементов, топологическая схема волоконно-оптического тракта и величина деформации локальных участков оптоволокна с ВБР определяются способом кодирования, способом считывания, параметрами МПКМЛ и элементов считывающего модуля. Предложены варианты конструктивного исполнения МПКМЛ и считывающего модуля, позволяющие получить цифровые инкрементные и абсолютные волоконно-оптические датчики линейного и углового перемещения без дополнительного аналого-цифрового преобразования оптических сигналов в удаленном оптоэлектронном блоке. Технический результат заключается в расширении технических возможностей путем увеличения диапазона измерения перемещения, повышения точности и стабильности процесса измерения, получения цифрового кода перемещения непосредственно в считывающем модуле. 2 з.п. ф-лы, 6 ил.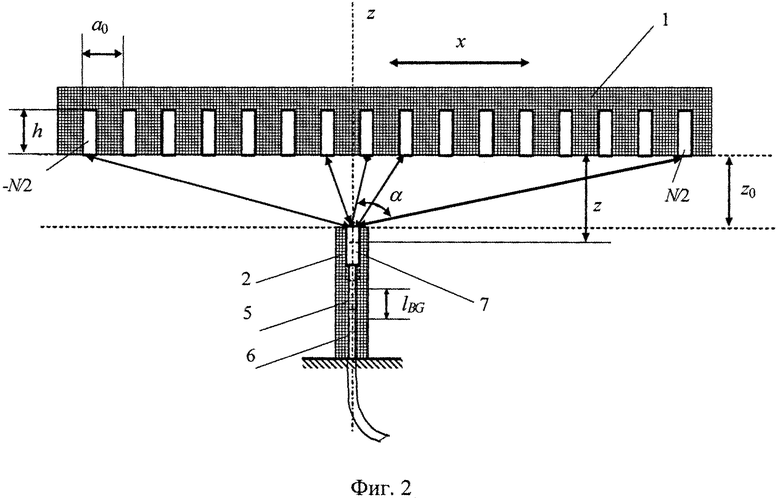
1. Цифровой волоконно-оптический датчик перемещения, содержащий магнитный или электромагнитный элемент, широкополосный источник света, оптическое волокно, по меньшей мере два датчика в виде внутриволоконной Брэгговской решетки, изготовленные из оптического волокна, по меньшей мере один сегмент магнитострикционного материала, стержень, изготовленный из материала, непроницаемого для магнитных полей, причем по меньшей мере один из двух датчиков прикреплен к сегменту магнитострикционного материала, при этом по меньшей мере один из сегментов магнитострикционного материала прикреплен к стержню, причем магнитный или электромагнитный элемент и стержень совмещены таким образом, что они могут испытывать относительное смещение только вдоль оси стержня, причем указанное смещение вызывает изменение размеров сегмента магнитострикционного материала, что приводит к изменениям длины волны, отражаемой датчиками в виде внутриволоконной Брэгговской решетки, отличающийся тем, что в него введены многополюсная кодирующая магнитная линейка и считывающий модуль в виде корпуса из немагнитного материала с направляющим пазом, участок оптического волокна, содержащий по меньшей мере два датчика в виде внутриволоконной Брэгговской решетки, настроенных на разные длины волн, и жестко соединенные с ними по меньшей мере два идентичных магниточувствительных элемента, расположенные в направляющем пазу, многополюсная кодирующая магнитная линейка соединена с объектом измерения и содержит две параллельно расположенные вдоль координаты перемещения периодические структуры из магнитных профилированных элементов с периодом следования элементов а0, линейной шириной элементов а0/2, высотой элементов h≥lBG, где lBG - длина внутриволоконной Брэгговской решетки, вторая периодическая структура сдвинута относительно первой периодической структуры по координате перемещения на величину а0/4, первый и второй датчики в виде внутриволоконной Брэгговской решетки и жестко соединенные с ними соответственно первый и второй магниточувствительные элементы заключены в направляющий паз корпуса считывающего модуля, имеющий форму прямой линии, ориентированной перпендикулярно координате перемещения и плоскости многополюсной кодирующей магнитной линейки, фрагменты участка оптического волокна, не содержащие датчики в виде внутриволоконной Брэгговской решетки, жестко закреплены в корпусе считывающего модуля, при этом при перемещении многополюсной кодирующей магнитной линейки относительно считывающего модуля обеспечивается изменение с периодом а0 длины волны отраженных от по меньшей мере первого и второго датчиков в виде внутриволоконной Брэгговской решетки, причем взаимное смещение первой и второй периодических структур на величину а0/4 обеспечивает реверсивный подсчет количества перемещающихся профилированных участков кодирующей магнитной линейки относительно модуля считывания при обработке оптических сигналов от внутриволоконных Брэгговских решеток.
2. Цифровой волоконно-оптическом датчик перемещения по п. 1, отличающийся тем, что многополюсная кодирующая магнитная линейка содержит одну периодическую структуру из магнитных профилированных элементов с периодом следования элементов a0, линейной шириной элементов a=a0/2≥dOB и высотой b≥dOB, где dOB - диаметр оптического волокна с внутриволоконной Брэгговской решеткой, а паз в корпусе считывающего модуля выполнен в форме дуги, плоскость которой ориентирована таким образом, чтобы обеспечивать размещение в нем участка оптического волокна с первым и вторым датчиками в виде внутриволоконной Брэгговской решетки и жестко соединенными с ними первым и вторым магниточувствительными элементами соответственно на расстоянии между оптическими осями указанных датчиков по координате перемещения, равном kа0+а0/4, где k=0, 1, 2….
3. Цифровой волоконно-оптическом датчик перемещения по п. 1, отличающийся тем, что многополюсная кодирующая магнитная линейка выполнена в форме n-разрядной цифровой шкалы, корпус считывающего модуля содержит паз, выполненный в форме линии, ориентированной параллельно плоскости многополюсной кодирующей магнитной линейки и перпендикулярно координате ее перемещения, а участок оптического волокна, размещенный в пазу, содержит по меньшей мере n датчиков в виде внутриволоконных Брэгговских решеток, настроенных на разные длины волн, и n магниточувствительных элементов, жестко соединенных с соответствующими датчиками в виде внутриволоконных Брэгговских решеток.
| ФАЗОВЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2272244C1 |
| УЧЕБНЫЙ КОМПЛЕКТ ПО ОПТИКЕ | 2009 |
|
RU2402823C1 |
| Устройство для сушки растворов,суспензий и эмульсий в кипящем слое инертных тел | 1982 |
|
SU1020734A1 |
| WO 2015106732 A1, 23.07.2015 | |||
| US 5680489 A1, 21.10.1997 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЯ И СЕРВЕР, ИСПОЛЬЗУЕМЫЙ В НЕМ | 2014 |
|
RU2609087C2 |

