Область техники, к которой относится изобретение
Изобретение относится к фазоконтрастной радиографической системе, к способу обработки данных, обеспечиваемых фазоконтрастной радиографической системой, к компьютерному программному элементу и к машиночитаемому носителю.
Уровень техники
В некоторых сканирующих системах визуализации, таких как маммографические сканирующие системы, изображаемый объект сканируется посредством перемещения детектора системы визуализации. Некоторые из этих сканирующих систем визуализации содержат установку интерферометра, обеспечивающую возможность фазоконтрастной визуализации на основе интерференционной решетки. См., например, C. Kottler et al., Grating interferometer based scanning setup for hard x-ray phase contrast imaging, Rev. Sci. Instrum. 78, 043710 (2007).
Предпосылка при фазоконтрастной визуализации состоит в том, что интенсивность излучения, определяемая детектором, не только кодирует информацию о поглощении (на этом основана традиционная рентгеновская радиография), но также сохраняет информацию о рефракции, которой подвергается излучение при его прохождении через изображаемый объект. При фазоконтрастной визуализации затем используется множество технологий, известных как «получение фазы», задача которых состоит в извлечении этой информации о рефракции из обнаруженных сигналов.
Было замечено, что когда используется установка с неподвижным интерферометром, то есть такая, в которой дифракционные решетки закреплены неподвижно относительно друг друга при визуализации, калибровка оказывается весьма обременительной. Например, в некоторых подходах используются специально разработанные фантомные объекты.
Раскрытие изобретения
Следовательно, может иметься потребность в другом способе и сопутствующей системе для фазоконтрастной визуализации с упрощенной процедурой калибровки.
Задача настоящего изобретения решается посредством объекта независимых пунктов формулы изобретения, причем дополнительные варианты осуществления содержатся в зависимых пунктах формулы изобретения. Следует заметить, что описанный ниже вариант изобретения в равной степени применим к компьютерному программному элементу и к машиночитаемому носителю.
В соответствии с первым вариантом изобретения, предложена фазоконтрастная радиографическая система сканирующего типа, содержащая:
основание;
раму, подвижную относительно основания;
смонтированный в раме или установленный на раме узел интерферометра, содержащего две или более решеток;
источник рентгеновского излучения для формирования излучения;
детектор, способный перемещаться при сканирующем движении для приема упомянутого излучения после взаимодействия упомянутого излучения с интерференционными решетками интерферометра для формирования картины интенсивности дрейфующего муара, которая может обнаруживаться детектором на протяжении последовательности считываний во время использования устройства;
элемент жесткости, выполненный с возможностью приложения силы к раме и/или к креплению интерферометра, чтобы изменять его жесткость перед сканирующим движением или во время его, с тем, чтобы воздействовать на относительное движение между по меньшей мере двумя интерференционными решетками, давая, тем самым, возможность управления изменением локальной фазы интерференции упомянутой муаровой картины.
За счет наличия компонента в виде элемента жесткости, предложенная здесь система визуализации позволяет управлять фазовым сдвигом муаровой картины вместо управления конкретной величиной сдвига, осуществляемого более-менее по выбору. Наличие возможности управления фазовым сдвигом муара имеет то преимущество, что операция калибровки детектора с целью получения фазы может более стабильно формировать изображение. Разработчик системы обладает лучшей возможностью управления тем, как быстро дрейфует муаровая картина, которая влияет на стабильность процедуры калибровки, в частности, предложенной здесь процедуры. В частности, при предложенной калибровке желательно иметь дрейф муаровой картины, равный по меньшей мере полному периоду при движении сканирования. С другой стороны, если картина дрейфует слишком быстро, это может привести к потере видимости, что может ухудшить общее качество изображения.
Например, может быть полезным слегка изменять уровень полного сдвига фаз интерференционной полосы между медио-латеральной-наклонной (MLO) проекцией, при которой рама отклоняется на средний угол, равный 40%-50% от вертикали, и проекцией CC, при которой портальная рама находится при среднем угле отклонения, приблизительно соответствующем вертикальному направлению. В противном случае, неуправляемый фазовый сдвиг муара может зависеть от влияний гравитации на различные компоненты, которые будут различаться для различных угловых положений.
В соответствии с одним из вариантов осуществления, элемент жесткости размещен в качестве привода зажима по меньшей мере с одной парой захватов для сцепления между собой рамы и/или узла интерферометра, чтобы позволить выборочно регулировать величину приложенной силы для достижения желаемой величины дрейфа муаровой картины.
В соответствии с одним из вариантов осуществления, элемент жесткости выполнен с возможностью приведения в действие вручную.
В соответствии с одним из вариантов осуществления, привод зажима содержит микрометрическое устройство с одним или более зажимами, выполненными с возможностью захвата крепления, так чтобы позволить пользователю выборочно регулировать величину приложенной силы дискретными ступенями.
Поскольку регулируемость ограничивается дискретными ступенями, различные установки жесткости являются повторяемыми, что, в свою очередь, гарантируют единообразное качество изображения.
В соответствии с одним из вариантов осуществления, элемент жесткости изготавливается из биметаллического листа, прикрепленного к раме и/или к креплению интерферометра.
В соответствии с одним из вариантов осуществления, система содержит генератор видеосигнала. Упомянутый генератор видеосигнала управляется, чтобы подавать последовательность считываний на блок отображения во время работы элемента жесткости для достижения визуального представления того, как фаза муара меняется в зависимости от приложенной силы. Это позволяет оператору легко выбирать определенные предпочтительные установки жесткости.
В соответствии с другим вариантом настоящего изобретения, обеспечивается способ обработки данных, подаваемых от фазоконтрастного радиографического устройства сканирующего типа, содержащего интерферометр, причем упомянутый способ содержит этапы, на которых:
принимают последовательность считываний детектора, которые в совокупности записывают дрейфующую муаровую картину, причем считывания обнаруживаются множеством пикселей детектора для детектора упомянутого устройства во время операции контрольного сканирования, а дрейф вызывается относительным движением между по меньшей мере двумя интерференционными решетками упомянутого интерферометра во время упомянутой операции сканирования;
аппроксимируют считывания к функции f модели сигнала измерения, находя для множества значений параметра калибровки, содержащего множество фаз (ϕl) дрейфующей муаровой картины и/или по меньшей мере i) интенсивность (Ai) для каждого пикселя или ii) видимость (Vi) для каждого пикселя.
Способ позволяет выполнять задачу калибровки более эффективно. Прежде, чем может быть осуществлено получение фазы, нужно получить некоторые данные о базовой линии, чтобы узнать о параметре калибровки, то есть индивидуальных характеристиках или специфическом поведении пикселей детектора. В прошлом это делалось, используя конкретные фантомные объекты, которые помещались в область исследования вместо молочной железы. В представленном подходе, однако, предлагается получать эти базовые линии на этапе калибровки исключительно на основе контрольного сканирования.
Другими словами, здесь предлагается усилить в других ситуациях нежелательный эффект, а именно, дрейф муаровой картины, чтобы получить (прежде всего) неизвестную фазовую информацию муаровой картины, увеличивая «объем» переменных и найти переменные ϕl фазового дрейфа при аппроксимации считываний. Это позволяет определять фазу муаровой картины без использования специальных фантомов или без знания абсолютного положения интерференционных решеток относительно друг друга.
В соответствии с одним из вариантов осуществления, операция аппроксимации содержит нахождение решения для пиксельного смещения (Δi) для каждого пикселя. Другими словами, модель функции сигнала увеличивается за счет пиксельных смещений, которые моделируют несовершенства расположений пикселей в детекторе. Это дополнительно увеличивает объем пригодных для аппроксимации переменных, позволяя, таким образом, моделировать отклонения типичной чисто синусоидальной муаровой картины, которая может возникать из-за несовершенства интерференционных решеток.
Проблема аппроксимации может быть изложена в целевой функции, которая может затем быть оптимизирована, чтобы выполнить операцию аппроксимации. Соответствующие алгоритмы оптимизации содержат нисходящий симплексный алгоритм, сопряженные градиенты или могут использоваться и другие алгоритмы.
В соответствии с одним из вариантов осуществления, способ дополнительно содержит этап, на котором:
регулируют жесткость рамы и/или крепления установленного в ней интерферометра, чтобы управлять величиной дрейфа муаровой картины. Это может делаться, используя предложенное здесь устройство визуализации, имеющее элемент жесткости.
В соответствии с одним из вариантов осуществления, способ дополнительно содержит этап, на котором:
применяют операцию получения фазы к считывания детектора для контрольного сканирования, чтобы сформировать по меньшей мере одно скорректированное фазоконтрастное изображение. Другими словами, считывания детектора для контрольного сканирования обрабатывают так, как если бы они были получены при сканировании объекта. При контрольном сканировании между источником излучения и детектором никакого объекта нет, тогда как при сканировании объекта этот объект помещается между источником излучения и детектором. Применение получения фазы содержит, в частности, перегруппировку (или повторную выборку или пересортировку) контрольных показаний детектора в группы в соответствии с направлением проекции через пространство визуализации, то есть пространство между источником рентгеновского излучения и детектором.
В соответствии с одним из вариантов осуществления, способ дополнительно содержит этапы, на которых:
сканируют изображаемый объект, чтобы получить считывания детектора для объекта;
используют по меньшей мере одно скорректированное фазоконтрастное изображение при применении операции получения фазы к считываниям детектора для объекта, чтобы получить фазоконтрастное изображение объекта.
Краткое описание чертежей
Далее примерные варианты осуществления изобретения будут описаны со ссылкой на следующие чертежи, на которых:
Фиг. 1 - устройство визуализации;
Фиг. 2 - операция сканирования устройства визуализации, показанного на фиг. 1;
Фиг. 3 - считывание детектором строки детектора;
Фиг. 4 - первый вариант осуществления компонента устройства визуализации, показанного на фиг. 1;
Фиг. 5 - второй вариант осуществления компонента устройства визуализации, показанного на фиг. 1;
Фиг. 6 - блок-схема способа обработки данных изображения.
Осуществление изобретения
На фиг. 1 показано радиографическое устройство MA фазоконтрастной визуализации. В одном из вариантов осуществления устройство фазоконтрастной визуализации является устройством для маммографии типа сканера, но следует понимать, что все далее сказанное находит равное применение в других сканирующих радиографических устройствах для фазоконтрастной визуализации, например, к сканерам для компьютерной томографии (СТ). Следует понимать, что термин «рама», используемый здесь, соответствует вращающейся портальной раме в системах СТ-сканеров.
Система MA визуализации подключается через соответствующее интерфейсное средство и через сеть связи к рабочей станции WS. Вообще говоря, рабочая станция WS является компьютерной системой, с помощью которой врач («пользователь») может управлять работой системы визуализации. В соответствии с одним из вариантов осуществления, существует также блок отображения или монитор М, который управляется рабочей станцией WS и который обеспечивает возможность отображения изображений, полученных системой визуализации. Рабочая станция WS использует операционную систему, которая, в свою очередь, управляет работой процессора данных изображения (IDP), содержащего многочисленные модули CAL, RECON и CORR, работа которых будет пояснена ниже более подробно.
Маммографическое устройство МА содержит основание PD, на котором установлен источник XR рентгеновского излучения. Источник рентгеновского излучения может вращаться вокруг своей фокальной точки FSP. На основании PD установлена вращающаяся портальная рама с вращающейся полой рамой AR. Рама AR может вращаться вокруг фокальной точки FSP. Рама содержит две или больше интерференционные решетки (решетку G0 источника, и π-фазовую решетку G1 и/или решетку G2 анализатора), которые в совокупности позволяют формировать фазовое изображение, как будет пояснено ниже более подробно. G1 может также быть π/2-фазовой решеткой или другой соответствующей фазовой решеткой. Даже возможно, хотя и не предпочтительно, вместо фазовой решетки G1 использовать решетку поглотителя, что является предпочтительным вариантом осуществления при медицинских применениях, но версия с поглотителем для G1 может требоваться в немедицинских контекстах.
На нижнем конце рамы AR устанавливается плата D детектора с чувствительной к излучению поверхностью для обнаружения излучения, излучаемого источником XR. Нижняя часть рамы также содержит крепление самих решеток GM, установленных сверху платы детектора. Крепление удерживает одну или две (предпочтительно, две) решетки G1, G2, с решеткой G1 над решеткой G2, и обе над платой детектора, в частности, обе решетки монтируются над чувствительной к излучению поверхностью платы D детектора. Решетка G0 источника располагается на верхнем конце рамы в выходном окне источника XR рентгеновского излучения. Также в одном из вариантов осуществления содержится и установлено на раме многоколлиматорное устройство, предпочтительно, предколлиматор PRC и постколлиматор PSC. Постколлиматор предназначен для удаления рассеяния, но этот компонент может не содержаться в конкретном варианте осуществления, поскольку решетка G2 действует аналогично для удаления рассеяния.
Имеется область исследования, определяемая как углубление в корпусе маммографического устройства МА для помещения в него примерного изображаемого объекта, например, груди BR пациентки. Часть корпуса маммографического устройства MA определяет корпус детектора, верхняя поверхность которого служит опорой BS для груди, на которую помещается грудь BR пациентки во время сеанса визуализации, при этом опора груди таким образом ограничивает область исследования снизу. Имеется также пластина CP сжатия или лопатка, которая может совершить возвратно-поступательное движение вверх и вниз, чтобы сжимать грудь при ее размещении на опоре для груди.
В дополнение к тому, что рама вращается, как описано выше, вся портальная рама также может вращаться вокруг центра вращения примерно на высоте опоры для груди. Вся портальная рама может, таким образом, наклоняться, чтобы изменять угол подхода для выборочной визуализации в различных проекциях, например, проекции CC (краниокаудальная) (вертикальное положение, на 12 часов) или проекции MLO (медио-латеральная наклонная), в положении приблизительно на 2 часа.
Излучение от источника XR поступает на раму через выходное окно и затем проходит через раму к детектору. При ее прохождении волна излучения взаимодействует с первой решеткой G0, также называемый решеткой G0 источника, чтобы обеспечить когерентность.
Короче говоря, поток излучения проходит следующим образом: волна излучения коллимируется одним или двумя коллиматорами, затем взаимодействует с грудью BR, если она присутствует в области исследования, после этого взаимодействует с двумя решетками G1, G2 и затем падает на плату D детектора, где должна обнаруживаться.
Маммографическое устройство МА выполнено с возможностью работы в двух основных режимах: в режиме контрольного сканирования или в режиме сканирования объекта. В режиме сканирования объекта, который является обычным режимом работы, грудь BR пациентки или другой образец размещается в области исследования. В режиме контрольного сканирования никакой объект или грудь не присутствует в области исследования. При сканировании объекта получают показания детектора, которые могут быть поданы на реконструктор RECON для вычисления фазоконтрастного проекционного изображения (и, при необходимости, (традиционного) изображения с контрастом по поглощению и/или изображения с контрастом по малому рассеиванию («темное поле»)) при операции получения фазы. Для работы по получению фазы необходим определенный параметр или данные калибровки, в частности, но не только, конкретные характеристики пикселей. Данные калибровки вычисляются модулем CAL калибровки модуля по показаниям детектора, полученным во время контрольного сканирования. Работа модуля CAL калибратора и модуля RECON реконструктора будет объяснена ниже более подробно со ссылкой на фиг. 6. Оба модуля предназначены для работы на рабочей станции WS.
Во время сканирования объекта или контрольного сканирования нижняя часть рамы (и с ней плата детектора и крепление решетки GM) механизирована, чтобы переместить детектор в корпусе под опору BS для груди. На левом краю фиг. 1 показана рама AR, наклоненная вбок, с ее компонентами, зависящими от ее положения и смонтированными в ней или на ней. В одном из режимов - сканирования объекта или контрольного сканирования - рама перемещается синхронно с вращением источника рентгеновского излучения вокруг ее фокальной точки FSP, так что плата детектора вместе с решетками G1 и G2 следуют по траектории SP сканера под грудью BR, если она присутствует. Обычно траектория сканирования представляет собой дугу, как показано на фиг. 1.
В одном из вариантов осуществления маммографическое устройство МА является устройством с одиночным или многочисленными срезами. Другими словами, чувствительная к излучению поверхность платы D детектора формируется одиночной или, вообще говоря, многочисленными (например, 8) строками полупроводникового детектора, осажденные на основание подложки, полученными посредством фотолитографии или другой подходящей технологии изготовления детектора. В центральной фронтальной вертикальной проекции, показанной на фиг. 1, эти строки DL детектора или дорожки уходят в плоскость бумаги, расположенную по бокам. Каждая строка детектора образуется линейной последовательностью пикселей детектора. Благодаря наличию устройства предколлиматора и постколлиматора, рентгеновский луч, по существу, расщепляется на множество минивеерных пучков, причем каждый веерный пучок излучается в какой-то один момент точно на одной из соответствующих строк детектора, а именно, той, которая оказывается проходящей через упомянутый веерный пучок во время движения детектора. Говоря иначе, строки детектора подвергаются облучению соответствующим минивеерным пучком, когда каждый минивверный пучок изменяет свое направление при сканировании. При прохождении вдоль траектории сканирования каждая строка детектора будет создавать соответствующие считывания в различных местах траектории. Другими словами, в отличие от двумерных сканеров, у которых все поле зрения получают в одном единственном снимке, в настоящей мультисрезной системе после завершения движения сканирования, последующие считывания детекторов во время сканирования могут использоваться для составления единого двумерного изображения поля зрения. На фиг. 2 схематично показана присущая избыточность (которая равна количеству строк детектора, имеющему порядок 20 строк в одном из вариантов осуществления) при подходе с мультисрезным сканированием. Строки детектора (пронумерованные как 1-5), проходят в плоскость бумаги, поперечную направлению сканирования. « считывания» в контексте настоящего документа означают данные, собранные пикселями вдоль заданной строки детектора, когда упомянутая строка детектора находится в заданном положении l на траектории сканирования. Говоря по-другому, считывания являются данными для каждого положения строки детектора.
Локальное положение каждого пикселя или строки может указываться двумя «координатами», индексом столбца или строки и индексом пикселя. Поскольку ширина пикселя, расстояние между пикселями и расстояние между строками известны, то поэтому известно положение платы детектора в любой момент времени на его траектории SP, каждое считывание детектора (которое является пиксельной реакцией), может быть «пространственно отмечено» устройством слежения (не показано), поэтому каждое считывание детектора может быть связано с конкретным положением фиксированного геометрического луча, который может рассматриваться как проходящий от фокальной точки FSP через область исследования к плате D детектора. Существует множество таких геометрических лучей и к каждой точке в области исследования существует такой геометрический луч, который проходит через упомянутую точку, и множество лучей формируют конус с фокальной точкой FP в качестве вершины. Один такой геометрический луч показан на фиг. 2 полужирной линией. Пространственные отметки, связанные с показаниями, позволяют разрешить эту избыточность, как будет объяснено более подробно на фиг. 6 при объяснении работы реконструктора RECON.
Настоящее маммографическое устройство использует фазоконтрастную визуализацию, другими словами, контраст изображения, который создается упомянутым устройством визуализации, основан не исключительно на поглощении, как в случае традиционных рентгеновских систем, а основан также на контрасте, получаемом в результате фазовых сдвигов, которые испытывает фронт волны излучения, когда взаимодействует с веществом в груди. Фазовые сдвиги или искажения волны вызываются локально различным рефрактивным поведением отображаемого вещества.
Однако, фазовые сдвиги сами по себе не могут обнаруживаться детектором из-за отсутствию достаточной пространственной разрешающей способности. Вместо этого, фазовые сдвиги получают опосредованно, используя интерферометрические решетки для выборки пространственной картины, картины муарового изображения, то есть той, которая может обнаруживаться после соответствующей настройки вдоль строк детектора. Муаровые картины возникают, когда периодичность интерференционных полос немного и контролируемо отличается от периодичности структур решетки G2 анализатора. Этот подход предложен A. Momose и другими в "High-Speed X-ray phase imaging and X-ray phase tomography with Talbot interferometer and white synchrotron radiation" в Optics Express, том 17, № 15, стр. 12540, (2009). Во-первых, в зависимости от средней длины волны излучения источником XR и должным образом выбранных соответствующих периодичностей p0, p1, p2 решеток G0-G2, коллиматоры и решетки тщательно настраиваются относительно строк детектора на требуемое расстояние Тэлбота желаемого порядка, выравнивая ориентацию и расстояние. См., например, T. Donath и др. в "Inverse geometry for grating-based x-ray phase-contrast imaging", J. Appl. Phys. 106, 054703 (2009). В этот момент, внимательно перестраивая эту настройку Тэлбота, например, варьируя расстояние между решеткой G0 источника и π-фазной решеткой G1 (или π/2-фазной решеткой) эталонная муаровая картина возникает вдоль строк детектора во время контрольного сканирования. То, как обнаруживается эта эталонная муаровая картина, зависит от локальных характеристик различных пикселей детектора, как упомянуто ранее в связи с данными калибровки. Затем предложение состоит в том, чтобы введение объекта BR при сканировании объекта создавало возмущение этой муаровой картины. Возмущение представляется как фазовый сдвиг эталонной муаровой картины и этот фазовый сдвиг муаровой картины, как известно, связывается с локальным градиентом фазового сдвига, который испытывает волна, проходя через объект. Таким образом, необходимо знать фазу («эталонную фазу») муаровой картины, чтобы иметь возможность выполнить получение фазы. Определение упомянутого эталона муаровой фазы является частью задачи калибровки, в общем описанной выше.
В предшествующих подходах к фазоконтрастной визуализации использовалась фиксированная интерферометрическая настройка, при которой для целей получения фазы одна из решеток двигалась относительно другой, чтобы сделать выборку интерференционной картины посредством «ступенчатого изменения фазы». См., например, T. Weitkamp и др. в "Optics Express", том 13, №16, стр. 6296-6304 (2005) Однако при настоящем подходе такое ступенчатое изменение фазы не требуется. Вместо этого операция получения фазы основана на сканирующем движении (вместе с движением решеток), которое используется здесь для анализа интерференционных полос муаровой картины, зарегистрированной детектором во время его движения для формирования желаемой фазоконтрастной информации (и попутно также быть полезна для визуализации на основе поглощения или визуализации в темном поле). Таким образом, движение детектора служит нескольким функциям: во-первых, оно позволяет получать полное поле зрения, что было первоначальной целью, и, во-вторых, движение используется для целей получения фазы.
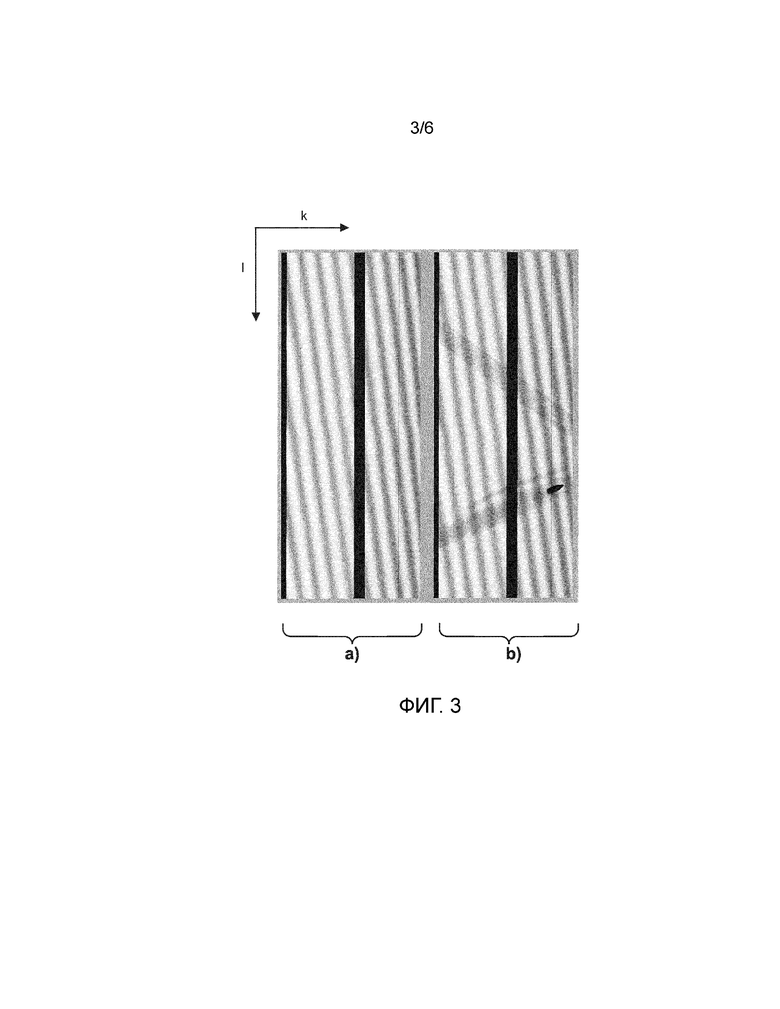
Однако избыточность в считываниях добавляет уровень сложности. Из-за сканирующего движения муаровая картина не только распределяется в пространстве вдоль строки детектора, но также распределяется во времени по различным считываниям детектора в различных положениях вдоль траектории. Прежде чем обратиться к модели CAL калибровки более подробно, теперь со ссылкой на фиг. 2 и фиг. 3 должны быть более подробно рассмотрены определенные характеристики считываний детектора при контрольном сканировании. Предположим на мгновение, что на фиг. 2 никакой объект не присутствует, что имеет место при контрольном сканировании. По мере того, как детектор движется вперед по своей траектории сканирования, определенная строка детектора, скажем, строка 5 на фиг. 2, будет принимать излучение от рентгеновского источника и эталонная муаровая картина будет возникать вдоль пикселей pxk упомянутой строки 5 детектора (строка детектора, показанная на фиг. 2, проходит в плоскость бумаги). Можно затем ожидать, что муаровые картины в каждый момент считывания могли бы быть одинаковыми. В конце концов, можно себе представить, что излучение проходит просто через воздух, который должен быть одинаковым для любой строки детектора, независимо от ее положения на трассе сканирования. Хотя, на самом деле, дело обстоит не так. Вместо этого, заявитель наблюдал, что муаровая картина, наблюдаемая одной и той же строкой детектора во время движения сканирования, не является одинаковой. Это показано на фиг. 3.
Левая часть на фиг. 3a показывает время 1 считывания относительно результатов измерений строки детектора, где k указывает положения пикселей на определенной одиночной строке. В различные моменты считывания существует дрейф, который можно видеть как темные и светлые полосы, проходящие на чертеже под наклоном, определяемым множеством считываний согласно фиг. 3. На правой стороне на фиг. 3b показан дрейф той же самой ширины во время сканирования объекта и замечательным является тот факт, что дрейф хорошо повторяется для контрольного сканирования и для сканирования объекта. Приблизительно на половине пути вдоль направления 1 считывания можно видеть «перегиб», который указывает момент, когда рама AR сканирования перешла через горизонтальное положение. Заявители заметили, что этот дрейф муара может быть обусловлен механическим несовершенством жесткости сканирующей рамы AR. Другими словами, рама AR и, следовательно, крепление GM решеток, расположенное на ней, слегка деформируются во время движения сканирующей рамы в связи с недостаточной жесткостью. Связанные с показаниями электроники широкие, темные полосы, проходящие вертикально, которые в одном из вариантов осуществления накладываются на строки детектора, так что там не может быть обнаружено никакое излучение. Например, задние полосы отмечают местоположение ASIC или другого электронного компонента. Однако, присутствие этих черных полос является только примером, поскольку в альтернативных вариантах осуществления компонент электроники считывания не накладывается на строки детектора.
Предлагается здесь сформулировать функцию модели сигнала, учитывающую упомянутый дрейф муаровой картины. Более конкретно, предлагается не только использовать конкретные количества детектора, которые обычно желательно определить при калибровке с контрольным сканированием, но также усилить эту модель введением в нее неизвестных дрейфа муаровой картины и, таким образом, увеличить объем переменной, чтобы достигнуть более стабильной оценки. Последующее моделирование является одним и тем же для каждой из строк детектора, поэтому мы далее в интересах компактности системы обозначений пропустим индекс строки. Обозначим измеренные интенсивности одной строки детектора во время сканирования как Ikl, где k является индексом столбца детектора и l - индекс считывания. Сначала опишем простую версию идеи, чтобы проиллюстрировать базовую концепцию. В этой упрощенной версии муаровая картина, измеренная посредством Ikl, моделируется, чтобы следовать функции сигнала:
Ikl=Ak(1+Vkcos(κk+ϕl)) (1)
Функция модели сигнала согласно (1) содержит два параметра, а именно, Ak и Vk, которые являются характеристикой детектора и локальными свойствами решеток. Параметр Ak относится к произведению входящей интенсивности и чувствительности пикселя k детектора, а параметр Vk относится к локальной видимости интерференционной полосы для пикселя k детектора. Поскольку эти два параметра являются конкретными параметрами детектора и решетки, они не меняются при изменении индекса l считывания, так как вместо этого они зависят только от положения k пикселя. Изменения картины интерференционной полосы во время считывания полностью зависят от простого фазового сдвига интерференционной картины, представленного специфичными для считывания фазами ϕl. Наконец, модель содержит также глобальный параметр κ, связанный с пространственной частотой интерференционных муаровых полос, обнаруживаемых вдоль строк детектора. В системе без какого-либо дрейфа муаровой картины все фазы ϕl должны быть одинаковы. Обеспечивая охватывание дрейфом нескольких периодов муаровой картины для каждого пикселя детектора во время сканирования, может быть получена стабильная оценка Ak и Vk.
Однако, как можно видеть, величина дрейфа находится более или менее в зависимости от мгновенной конфигурации рамы AR устройства визуализации и определенной заданной жесткости, которая обычно не управляется разработчиком системы. Здесь предлагается это изменить и снабдить маммографическое устройство МА механическим средством, таким как элемент жесткости RGD, чтобы иметь возможность управлять жесткостью, в частности, рамы AR сканера и всех креплений GM решеток, посредством соответствующего механического действия.
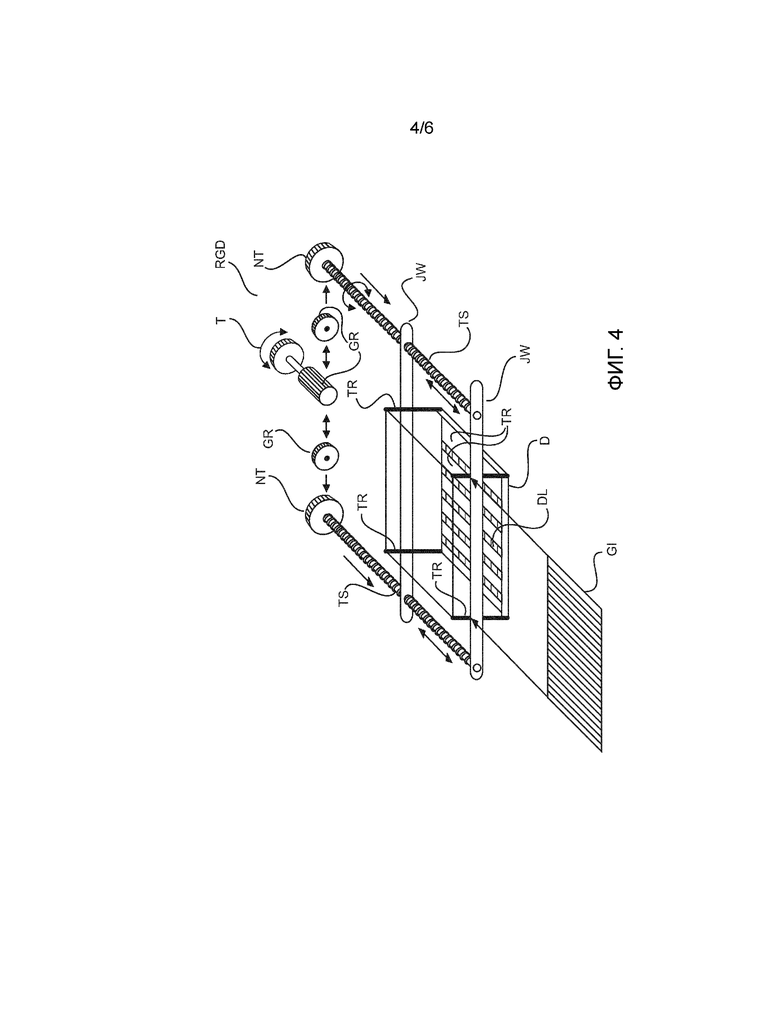
На фиг. 4 показано устройство для непосредственного управления жесткостью креплений GM решеток, расположенных в раме AR сканера. На фиг. 4 показан вид в перспективе крепления GM решеток, которое в этом варианте осуществления является рамой (в одном из вариантов осуществления изготовленной из стали), установленной на плате D детектора. В примерном варианте осуществления, показанном на фиг. 4, четыре строки DL детектора показаны как осажденные на плату D детектора. В общем плане, устройство элемента жесткости RGD может представляться как устройство с ходовым винтом. Имеется набор захватов JW, которые охватывают каркас креплений GM решеток с двух сторон. На одном из концов этих двух захватов резьбовой вал TS проходит через соответствующие отверстия в захватах и жестко соединяется с ними. Направляющая гайка NT устанавливается на соответствующих концах резьбовых валов и может продвигаться вперед вдоль вала в направлении соответствующих концов захватов JW под действием соответствующего зубчатого устройства GR, которое действует, чтобы сцеплять упомянутые гайки с колесом T с накаткой, которое вращается пользователем. В процессе работы пользователь вращает колесо T с накаткой и, таким образом, осуществляет продвижение вперед гаек NT зубчатого устройства вдоль их соответствующего резьбового вала, чтобы принудительно заставить каждую из них войти в зацепление с соответствующими захватами JW. Это позволяет пользователю прикладывать силу к каркасу GM и существенно его сжимать, изменяя, таким образом, жесткость крепления GM решеток. В соответствии с одним из вариантов осуществления, имеется храповый механизм, вставленный между зубчатым сцеплением и колесом T с накаткой для обеспечения того, чтобы сила прикладывалась к каркасу GM только дискретными ступенями и не могла изменяться непрерывно. Это обеспечивает более высокую повторяемость конкретной муаровой картины, которая связывается с определенным приложением силы. Также, как показано на фиг. 4, существуют устройства TR слежения сформированные в каркасе GM, в который решетки G1 или G2 (на фиг. 4 для простоты представления показана только одна решетка G1), устанавливаются с возможностью скольжения, мало чем отличающегося от скольжения в диапроекторе. Однако, следует понимать, что элемент жесткости, который непосредственно воздействует на каркас GM с креплением решеток, может принимать самые разные формы и на фиг. 4 показан только один из вариантов осуществления. Хотя вариант осуществления показанный на фиг. 4, предназначен для ручной работы, моторизованная версия также предусматривается и имеет контроллер, который воздействует или изменяет жесткость в ответ на входное воздействие. Также на фиг. 4 обе гайки NT двигаются синхронно под управлением винта Т с накаткой. Это всего лишь один вариант осуществления, однако, в качестве других вариантов осуществления предусматриваются варианты, в которых каждая гайка может приводиться в действие независимо от другой, которые применются как в ручной, так и в моторизованной версиях. Например, также предусмотрено микрометрическое устройство, в котором устройство типа микрометра выполнено таким образом, что каркас GM приходит в положение между двумя зажимами. Действие наконечника микрометра продвигает вперед шпиндель и каркас GM решеток входит в зацепление между зажимами, чтобы приложить к нему усилие. Опять, соответствующий механизм храпового типа может быть установлен так, чтобы обеспечивать, что приложение силы ограничивается дискретными ступенями с измеренной и градуированной силой.
На фиг. 5 показан альтернативный вариант осуществления, который может использоваться вместо или в дополнение к варианту осуществления, показанному на фиг. 4. На фиг. 5 элемент жесткости RGD воздействует на каркас крепления решеток косвенно за счет приводов BA, расположенных с любой из сторон рамы AR. Другими словами, на фиг. 5 элемент жесткости воздействует непосредственно на раму, чтобы изменять жесткость рамы.
На фиг. 5а показаны приводы BA, например, стержневые элементы, расположенные в соответствующем количестве (один или более, в данном случае, три элемента показаны в качестве примера, но не для создания ограничения) попарно вдоль рамы AR. Под воздействием приводов BA сила прикладывается к раме AR в соответствующих местах, чтобы, таким образом, изменять общую жесткость рамы AR. Другие наборы приводов могут работать синхронно или могут также действовать независимо, таким образом, предоставляя более высокую степень заказной возможности изменения жесткости.
В другом варианте осуществления используется биметаллическая фольга. Одна сторона упомянутой фольги прикрепляется с помощью сварки или клея к раме AR, одной из сторон, внутренней или внешней. Рама по существу «заворачивается» или обертывается упомянутой фольгой. Затем биметаллический металл нагревается до различных температур (перед сканированием, чтобы учесть определенную тепловую инерционность), чтобы затем увеличивать или уменьшать чувствительность рамы к изгибу за счет изменения гравитационных вращающих моментов во время сканирования.
В одном из вариантов осуществления работа элемента жесткости происходит во время фактического движения сканирования в отличие от предрегулировок или пострегулировок сканирования, которые также предусматриваются. В одном из вариантов осуществления контроллер RGDC элемента жесткости управляет элементом жесткости RGD автоматически. Например, что наблюдалось ранее в связи с фиг. 2, величина фазового сдвига муаровой картины является индикатором жесткости или ее отсутствия. Считывания согласно фиг. 2 для определенной строки детектора могут быть введены в контроллер RGDC. Контроллер RGDC затем управляет приводами BA, чтобы динамически увеличивать/уменьшать жесткость в зависимости от обнаруженной величины дрейфа фазы муара в соответствии с показаниями детектора. Большое изменение повлечет за собой приложение большей силы, чтобы сохранить жесткость, тогда как в другом случае приложение силы может быть ослаблено. Контролер может таким образом работать в замкнутом контуре, чтобы увеличивать или уменьшшать силу для поддержания желательного смещения муаровой картины или обеспечивать, чтобы этот фазовый сдвиг оставался ниже определяемого пользователем порога.
В альтернативном варианте осуществления или в дополнение к контролю считываний, чтобы определить велчину силы (или теплоты, в зависимости от обстоятельств, для варианта осуществления с биметаллом), которая должна прикладываться, работа элемента жесткости может быть связана с определенными положениями платы детектора на траектории SP. Например, как наблюдалось ранее, при прохождении рамы AR через вертикальное положение существует изменение фазы муара. Это может быть моментом тогда, когда требуется большая жесткость. Работа контроллера RGDC может поэтому программироваться так, чтобы сила прикладывалась в ответ на положение рамы AR вдоль ее траектории SP, в частности, сила прикладывается, когда рама принимает вертикальное положение.
Кроме того, может быть полезным немного изменять уровень общего фазового сдвига интерференционной полосы между проекцией MLO, когда портальная рама находится под средним углом приблизительно 40%-50% от вертикали, и проекцией CC, когда портальная рама находится под средним углом вблизи вертикального направления. Управление сдвигом посредством изменения жесткости будет смещать раму или каркас GM, так как в противном случае будут возникать нежелательные эффекты, вызванные воздействием силы тяжести на различные компоненты, которые будут различными для различных угловых положений для других проекций.
В соответствии с одним из вариантов осуществления предусматривается, что соответствующие считывания во время работы элемента жесткости формируются для просмотра на экране, что позволяет пользователю напрямую следить за тем, как изменяется муаровая картина при изменении приложения силы. В одном из вариантов осуществления графическое представление дрейфа муаровой картины показано на фиг. 3 и может формироваться для просмотра на экране.
Обратимся к процессу считывания детектором. В более общем плане, как будет обяснено ниже более подробно, данные калибровки получают при наличии считывания детектором во время контрольного сканирования, обработанных блоком CAL калибровки. Калибровочные данные затем подаются на реконструктор RECON, который затем работает, чтобы выполнить этап получения фазы для формирования, помимо прочего, фазоконтрастного изображения и/или изображения на основе поглощения и/или изображения на основе рассеяния.
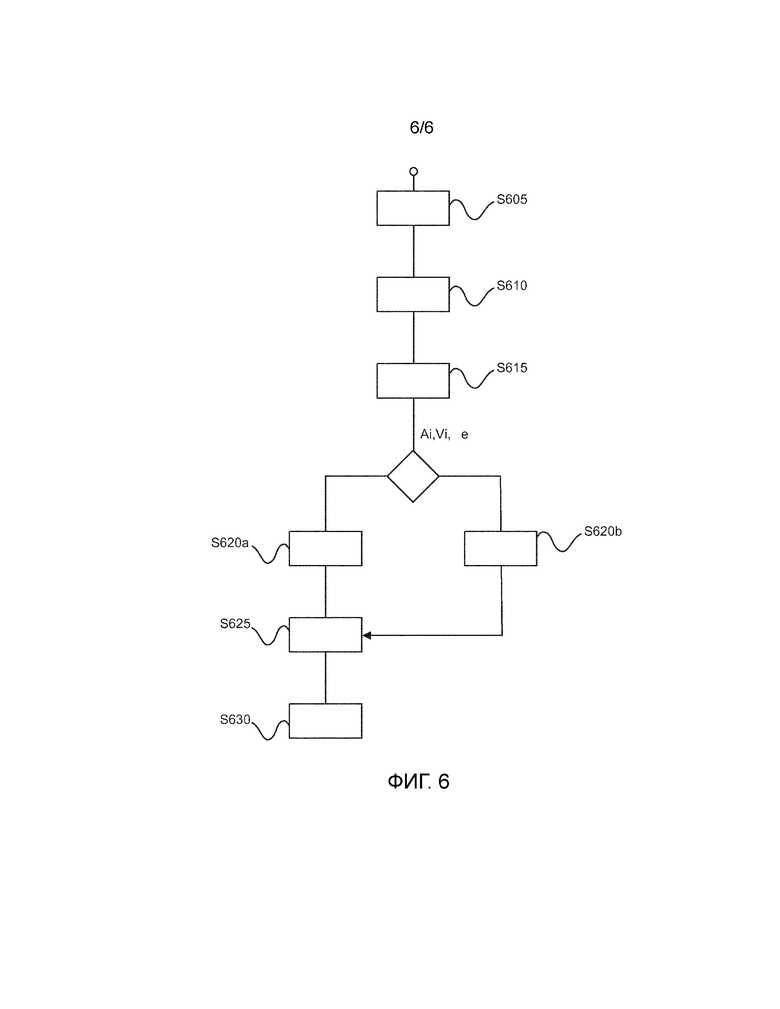
Обращаясь теперь к работе модуля CAL калибровки, ссылка будет делаться на блок-схему последовательности выполнения операций, показанную на фиг. 6. На этапе 605 жесткость рамы AR и/или крепления GM решеток регулируется до желаемой степени жесткости.
На этапе 610 контрольное сканирование теперь выполняется с рамой, имеющей желаемую жесткость. Каждый пиксель реагирует, выдавая электрический сигнал, зависящий от интенсивности излучения, получаемой соответствующим пикселем в данный момент и/или в данном положении вдоль траектории сканирования. Набор этих электрических сигналов затем преобразуется аналогово-цифровым (A/D) преобразователем посредством блока DAS сбора данных в цифровую форму и затем передается калибратору CAL в качестве соответствующих считываний детектора. Было замечено, что для формирования муаровой картины требуется определенное минимальное количество пикселей на строку детектора. Было обнаружено, что для хорошей работы количество пикселей должно составлять приблизительно 200 или 250 пикселей (в частности, 256).
Соответствующие считывания Ikl детектора затем на этапе 615 аппроксимируются к модели, соответствующей приведенному выше уравнению (1). Аппроксимация может быть достигнута при использовании метода наименьших квадратов или метода взвешенных наименьших квадратов или любого другого соответствующего метода численной аппроксимации кривой. Например, при подходе по методу наименьших квадратов уравнение (1) может быть переформулировано как объективная функция  следующим образом:
следующим образом:

Это достаточно серьезная проблема нелинейной аппроксимации с тремя неизвестными Ak, Vk, для параметров калибровки.
для параметров калибровки.
Оптимизация может быть выполнена в одном из вариантов осуществления в несколько этапов нестрогого метода итерационных координат, который разбивает большую проблему на несколько более мелких подпроблем, которые решаются легче. В частности, при введении объективной функции  для каждого индекса l считывания, уравнение (2) теперь выглядит следующим образом:
для каждого индекса l считывания, уравнение (2) теперь выглядит следующим образом:

Эта операция нелинейной аппроксимации с тремя неизвестными Ak, Vk, для градуировочных параметров, которая может быть выполнена нисходящим симплексным алгоритмом или соответствующим алгоритмом оптимизации с нелинейной объективной функцией (или "функцией стоимости"). Следует понимать, что вышеупомянутая процедура аппроксимации согласно уравнению (3) должна будет повторяться для каждой строки детектора. Это может делаться последовательно или, предпочтительно, параллельно. Кроме того, операция аппроксимации может быть начата, пока идет сканирование и как только становятся доступны считывания. Альтернативно, сначала собираются считывания и после завершении движения сканирования DAS направляет считывания модулю CAL калибровки и аппроксимация затем проводится последовательно или параллельно.
Выходным результатом этапа S615 аппроксимации является тройка параметров калибровки для каждого пикселя k соответствующей строки детектора. Калибровочная тройка для каждого пикселя на данной строке детектора содержит два зависящих от пикселя параметра: i) входная интенсивность Ak, и ii) видимость Vk. Существует также независимый от пикселя параметр, а именно, локальная фаза муаровой интерференционной полосы для каждого индекса l считывания.
В альтернативном варианте осуществления вместо этого используется другая, более подробная функция модели сигнала. Функция модели, используемая в уравнении 1, является просто чисто синусоидальным вариантом муаровой интерференционной полосы. Если решетки интерферометра не являются совершенно плоскими, могут существовать отклонения от этой идеальной модели. Более сложные модели, возможно с эвристическими параметрами, могут использоваться для моделирования результатов измерений в такой ситуации. Одним конкретным набором дополнительных параметров, который был реализован, являются средние значения положений пикселей для конкретных пикселей в пределах строки детектора в следующем виде:

В основном, модель является усовершенствованием модели, соответствующей уравнению 1, которое учитывает отклонения от чисто синусоидальной формы, предполагая, что пиксели детектора перемещаются вдоль их соответствующей строки детектора на фиксированное значение Δk от номинального интервала между пикселями (который в одном варианте осуществления составляет порядка 50 микрон, но это лишь пример, не предназначенный для ограничения). Конечно, это только "интерпретация" параметра Δk, который не обязательно представляет истинную причину отклонения. Фактически, несовершенство решетки может приводить к фазовому сдвигу муаровой картины, который также может быть хорошо представлен параметром Δk. При использовании функции модели сигнала в соответствии с уравнением 4 вместо уравнения 4, происходит аппроксимация переменных, а именно, трех переменных Ak, Vk, , как раньше, и параметр смещения Δk. Аппроксимация методом нисходящего симплекса или другим подходящим методом оптимизации является такой, которая объясняется выше для уравнения 4, где теперь член косинуса заменяется членом  .
.
Когда посредством операции оптимизации параметры Ak, Vk, получены (если усовершенствованная модель соответствует уравнению (4), существуют также аппроксимированные смещения  пикселей), они могут храниться в запоминающем устройстве и затем быть применены к следующим данным сканирования объекта, когда произойдет возвращение к операции реконструктора RECON, как будет теперь объяснено ниже более подробно.
пикселей), они могут храниться в запоминающем устройстве и затем быть применены к следующим данным сканирования объекта, когда произойдет возвращение к операции реконструктора RECON, как будет теперь объяснено ниже более подробно.
На этапе 620a выполняется сканирование объекта. Снова передаются считывания детектора, но на этот раз на реконструктор RECON через переключатель SW.
Чтобы лучше понять работу этапа получения фазы, который должен выполняться на этапе 625, стоит заметить, что работа модуля CAL калибровки не была обременена избыточностью в отношении той же самой геометрической матрицы, как наблюдалось ранее. Как следует понимать, предыдущие вычисления до этапа S620a продолжаются по строкам детектора, где каждая тройка параметров калибровки назначается для каждого из пикселей k при каждом из считываний l. Этот контекст «построчной обработки» более не применим к этапу получения фазы. Вместо этого контекстом обработки для получения фазы являются все данные, принадлежащие одному и тому же геометрическому лучу. Именно поэтому, чтобы получить пиксель в фазоконтрастном изображении, которое должно быть реконструировано, будет необходимо собрать все эти результаты измерений детектора, которые вносят свой вклад в пиксель изображении, которое должно представлять накопленные фазовые сдвиги вдоль упомянутой геометрической траектории. Накопленные фазовые сдвиги затем формируют проекционную точку, которая служит в качестве контраста изображения. Эта операция сбора данных для каждого геометрического луча может быть выполнена посредством действия устройства захвата данных, которое оценивает «пространственные отметки» для каждого считывания и собирает пиксельные считывания в группы для каждой геометрической матрицы.
Получение фазы выполняется независимо для каждого геометрического луча. Обозначим количество измерений для заданного луча как n. Дополнительно, пиксели, вносящие свой вклад в этот геометрический луч, имеют параметры калибровки Ai, Vi и βi=κ(i+Δi)+ϕl или βi=κi+ϕl (в зависимости от того, использовалась ли модель 1a или 1), как было ранее определено на этапе калибровки. Фактические результаты измерений пикселей, полученные во время сканирования объекта, обозначаются как gi. Влияние объекта BR на результаты измерений моделируется тремя параметрами изображения В (затухание рентгеновского пучка), S (потеря видимости интерференционной картины за счет малого углового рассеивания, это также называют темным полем) и ϕ (фазовый сдвиг пучка за счет рефракции, которая (после соответствующего масштабирования) соответствует фактическому фазоконтрастному изображению, которое должно быть реконструировано. Другие параметры изображения для изображения на основе поглощения и темного поля могут потребоваться или не потребоваться при дополнительной обработке или отображении.
Эти параметры изображения B, S, ϕ для каждого геометрического луча (то есть узла решетки изображения) оценивают, минимизируя функцию стоимости:

Это нелинейная аппроксимация с тремя неизвестными, которая снова может быть найдена посредством нисходящего симплексного алгоритма или другого соответствующего алгоритма оптимизации, как объяснялось ранее в связи с этапом аппроксимации модуля CAL калибровки. Выходным результатом на этапе S620 для каждого геометрического луча является соответствующая точка изображения, которые совместно (взятые для всех геометрических лучей) определяют результирующие изображения на основе затухания, потери видимости и дифференциальной фазы.
Затем на этапе S630 результирующие изображения на основе затухания и/или потери видимости и/или дифференциальной фазы выводятся и могут быть сформированы для отображения на мониторе MT или изображение может обрабатываться как-либо иначе.
Существует также необязательный этап 620b коррекции артефактов, осуществляемый модулем CORR коррекции. Заявители в некоторых случаях наблюдали в реконструированном изображении определенные артефакты. Более конкретно, основная структура артефактов продолжает следовать муаровой картине. Источником этих артефактов является тот факт, что даже при расширенной модели сигнала, соответствующей уравнению (4), контрольное сканирование не моделируется с достаточной точностью. Чтобы бороться с этими артефактами дрейфа, здесь предлагается концепция аннулирования артефакта, как описано здесь далее. Дополнительно наблюдалось, что артефакты, сами по себе присутствующие в дифференциальном фазовом изображении, полученном, в частности, для расширенной модели согласно уравнению (4), хорошо воспроизводятся, если мы используем контрольное сканирование в качестве сканирования объекта. Другими словами, сами параметры калибровки обрабатываются на этапе S20b, как если бы они получены из сканирования «объекта», выполняя операцию получения фазы, аналогичную этапу S625. Другими словами, тройка параметров калибровки группируется устройством захвата в группы для каждого геометрического луча, как было объяснено ранее для этапа S625 «реального» получения фазы на основании данных сканирования объекта. Соответствующие изображения на основе поглощения, темного поля и фазового сдвига могут считаться соответствующими изображениями с коррекцией; такими изображениями являются изображение на основе поглощения с коррекцией, изображение на основе темного поля с коррекцией и фазоконтрастное изображение с коррекцией. Опять же эта операция обращения с контрольным сканированием как со сканированием объекта, выполняя операцию получения фазы для данных калибровки контрольного сканирования, весьма парадоксальна, поскольку калибровочные данные сами по себе обычно не предназначены для отображения и операция получения фазы обычно выполняется точно, чтобы получить изображения для отображения. Теперь, увидев, что мы можем воспроизводить некоторые артефакты с помощью этого дополнительного контрольного сканирования для процесса сканирования объекта, здесь предлагается передавать это изображение с коррекцией обратно на реконструктор изображения и аннулировать эти артефакты, вычитая это «чистое» изображение после коррекции артефактов из истинного изображения объекта, полученного во время получения фазы. Другими словами, изображение с коррекцией используется при выполнении операции получения фазы для данных изображения объекта. В одном из вариантов осуществления применение изображения с коррекцией соответствует  , где B', V',
, где B', V',  являются соответствующими изображениями с коррекцией, а B, V,
являются соответствующими изображениями с коррекцией, а B, V,  являются изображением на основе поглощения, изображением на основе темного поля и фазоконтрастным изображением, полученными на этапе получения фазы из считываний при сканировании объекта, имеющих знак «тильды» (~), указывающий соответствующие скорректированные версии.
являются изображением на основе поглощения, изображением на основе темного поля и фазоконтрастным изображением, полученными на этапе получения фазы из считываний при сканировании объекта, имеющих знак «тильды» (~), указывающий соответствующие скорректированные версии.
Чтобы избежать введения дополнительного шума из-за этапа аннулирования артефактов, изображение с артефактами несколько фильтруется фильтром нижних частот в направлении сканирования.
Влияние различных этапов обработки, то есть улучшенное моделирование интерференционной картины согласно уравнениям 1 и 1a и аннулирование артефактов на этапе 620b здесь было объяснено, используя только дифференциальные фазоконтрастные изображения. Для изображения с контрастом на основе затухания и изображения на основе видимости могут быть получены аналогичные улучшения.
В одном из вариантов осуществления компоненты системы IDP обработки данных изображения, соответствующей фиг. 1, все работают на единой компьютерной системе, такой как рабочая станция WS устройства МА визуализации. В альтернативном варианте осуществления предусмотрена по меньшей мере частично распределенная архитектура, аналогичная приведенной здесь, в которой один или более компонентов размещены удаленно и соединены друг с другом и/или с системой IDP обработки данных изображения в соответствующей системе связи.
В одном из вариантов осуществления система IPD обработки данных изображения (или по меньшей мере некоторые из ее компонентов) строится как специализированная FPGA или как жестко запрограммированный (автономный) чип.
Узлы системы обработки данных изображения могут программироваться на соответствующей платформе для научных вычислений, такой как Matlab® и могут быть преобразованы в программы на языке C++ или C, пригодные для работы на компьютерной системе (такой как рабочая станция WS устройства визуализации).
В другом примерном варианте осуществления настоящего изобретения предложена компьютерная программа или компьютерный программный элемент, отличающиеся тем, что они выполнены с возможностью выполнения этапов способа в соответствии с одним из предшествующих вариантов осуществления на соответствующей системе.
Компьютерный программный элемент может храниться в вычислительном блоке, который также может быть частью варианта осуществления настоящего изобретения. Этот вычислительный блок может быть выполнен с возможностью выполнения или вызова выполнения этапов способа, описанного выше. Кроме того, он может быть выполнен с возможностью управления компонентами описанного выше устройства. Вычислительный блок может быть выполнен с возможностью автоматического управления и/или выполнения команд пользователя. Компьютерная программа может быть загружена в оперативную память процессора. Таким образом процессор может быть оборудован для выполнения способа согласно изобретению.
Этот примерный вариант осуществления изобретения охватывает как компьютерную программу, которая с самого начала использует изобретение, и компьютерную программу, которая посредством обновления превращает существующую программу в программу, использующую изобретение.
Кроме того, компьютерный программный элемент может быть способен обеспечивать все необходимые этапы, чтобы выполнить процедуру примерного варианта осуществления способа, как описано выше.
В соответствии с дополнительным примерным вариантом осуществления настоящего изобретения предложен машиночитаемый носитель, такой как CD-ROM, причем машиночитаемый носитель хранит компьютерный программный элемент, описанный в предыдущем абзаце.
Компьютерная программа может храниться и/или распространяться на соответствующем носителе, таком как оптический носитель или твердотельный носитель, поставляемый вместе или как часть другого аппаратурного обеспечения, но который может также распространяться в других формах, таких как через Интернет или другие проводные или беспроводные системы связи.
Однако компьютерная программа может также обеспечиваться по сети, такой как сеть интернет, и может загружаться в оперативную память процессора из такой сети. В соответствии с дополнительным примерным вариантом осуществления настоящего изобретения, предложен носитель, обеспечивающий компьютерный программный элемент для загрузки, причем компьютерный программный элемент выполнен с возможностью выполнения способа, соответствующего одному из ранее описанных вариантов осуществления изобретения.
Следует заметить, что варианты осуществления изобретения описаны со ссылкой на различные объекты изобретения. В частности, некоторые варианты осуществления описаны со ссылкой на пункты формулы изобретения на способ, тогда как другие варианты осуществления описаны со ссылкой на пункты формулы изобретения на устройство. Однако специалист в данной области техники поймет из приведенного выше и нижеследующего описания, что, если не указано иное, в дополнение к любому сочетанию признаков, относящихся к одному типу объекта изобретения, в настоящей заявке считается раскрытым любое сочетание признаков, относящихся к различным объектам изобретения. Однако все признаки могут объединяться, обеспечивая синергетические эффекты, которые являются большим, чем простая сумма признаков.
Хотя изобретение было подробно проиллюстрировано и описано на чертежах и в вышеприведенном описании, такую иллюстрацию и описание следует считать иллюстративными или примерными и не ограничивающими. Изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации раскрытых вариантов осуществления могут быть предусмотрены и осуществлены специалистами в данной области техники при практическом осуществлении настоящего изобретения на основании изучения чертежей, описания и зависимых пунктов формулы изобретения.
В формуле изобретения слово «содержащий» не исключает другие элементы или этапы и единственное число не исключает множественного числа. Один процессор или другой блок может выполнять функции нескольких элементов, приведенных в пунктах формулы изобретения. Сам по себе тот факт, что определенные средства приведены в различных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих средств не может использоваться с достижением преимущества. Любые ссылочные позиции в формуле изобретения не должны истолковываться как ограничивающие объем изобретения.



Группа изобретений относится к медицинской технике, а именно к средствам для фазоконтрастной радиографии. Фазоконтрастная радиографическая система (MA) сканирующего типа, содержит основание (PD), раму (AR), подвижную относительно основания, узел интерферометра в креплении (GM) в раме или на раме, включающий в себя одну или более решеток (G0, G1, G2), источник (XR) рентгеновского излучения, детектор (D), смонтированный в раме или на раме, подвижный при сканирующем движении для приема излучения после взаимодействия излучения с решетками интерферометра для создания картины интенсивности дрейфующего муара, обнаруживаемой детектором на протяжении последовательности считываний во время использования устройства, элемент (RGD) жесткости, выполненный с возможностью приложения силы к раме и/или к креплению интерферометра для изменения жесткости рамы и/или крепления (GM) интерферометра перед или во время упомянутого сканирующего движения таким образом, чтобы передавать относительное движение между этими по меньшей мере двумя решетками, таким образом обеспечивая возможность изменения локальной фазы интерференционной полосы упомянутой муаровой картины. Способ обработки данных, выдаваемых фазоконтрастным радиографическим устройством сканирующего типа, содержит этапы, на которых принимают (S610) последовательность считываний детектора, которые вместе регистрируют дрейфующую муаровую картину, причем считывания обнаружены множеством пикселей детектора упомянутого устройства во время операции контрольного сканирования, при этом дрейф вызван относительным движением по меньшей мере двух решеток интерферометра во время операции сканирования, аппроксимируют (S615) считывания к функции f модели сигнала измерения, находя для значений параметров калибровки, включающих в себя множество фаз (ϕl) дрейфующей муаровой картины и/или по меньшей мере одно из: i) интенсивности (Ai) для каждого пикселя или ii) видимости (Vi) для каждого пикселя, и регулируют (S605) жесткость рамы и/или крепления интерферометра путём приложения силы к креплению интерферометра или к раме, имеющей крепление интерферометра, таким образом, чтобы управлять величиной дрейфа муаровой картины. Машиночитаемый носитель предназначен для осуществления способа обработки данных. Использование изобретений позволяет упростить процедурную калибровку. 3 н. и 10 з.п. ф-лы, 6 ил.
1. Фазоконтрастная радиографическая система (MA) сканирующего типа, содержащая:
основание (PD);
раму (AR), подвижную относительно основания;
узел интерферометра в креплении (GM) в раме или на раме, включающий в себя одну или более решеток (G0, G1, G2);
источник (XR) рентгеновского излучения для формирования излучения;
детектор (D), смонтированный в раме или на раме, подвижный при сканирующем движении для приема упомянутого излучения после взаимодействия упомянутого излучения с решетками интерферометра для создания картины интенсивности дрейфующего муара, обнаруживаемой детектором на протяжении последовательности считываний во время использования устройства;
элемент (RGD) жесткости, выполненный с возможностью приложения силы к раме и/или к креплению интерферометра для изменения жесткости рамы и/или крепления (GM) интерферометра перед или во время упомянутого сканирующего движения таким образом, чтобы передавать относительное движение между этими по меньшей мере двумя решетками, таким образом обеспечивая возможность изменения локальной фазы интерференционной полосы упомянутой муаровой картины.
2. Фазоконтрастная радиографическая система по п. 1, в которой элемент жесткости выполнен в виде привода зажима по меньшей мере с одной парой захватов (JW, BA) для зацепления между ними рамы и/или узла интерферометра, чтобы обеспечить возможность регулирования по выбору величины приложенной силы для достижения требуемой величины дрейфа муаровой картины.
3. Фазоконтрастная радиографическая система по п. 1 или 2, в которой элемент (RGD) жесткости выполнен с возможностью приведения в действие вручную.
4. Фазоконтрастная радиографическая система по п. 2, в которой привод зажима содержит микрометрическое устройство с одним или более зажимами (JW), выполненными с возможностью взаимодействия с креплением (GM), чтобы позволить пользователю регулировать по выбору величину приложенной силы дискретными ступенями.
5. Фазоконтрастная радиографическая система по п. 1, в которой элемент (RGD) жесткости выполнен из биметаллического листа, прикрепленного к раме (AR) и/или к креплению (GM) интерферометра.
6. Фазоконтрастная радиографическая система по п. 1, содержащая генератор (VS) видеосигнала для подачи последовательности считываний на блок (MT) отображения во время работы элемента жесткости, чтобы достичь визуального отображения того, как фаза муара изменяется в зависимости от приложенной силы.
7. Фазоконтрастная радиографическая система по п. 1, содержащая:
модуль (CAL) калибровки, выполненный с возможностью:
приема последовательности считываний детектора;
аппроксимации считываний к функции f модели сигнала измерения посредством нахождения для значений параметров калибровки, содержащих множество фаз (ϕl) дрейфующей муаровой картины и/или по меньшей мере одно из: i) интенсивности Ai для каждого пикселя или ii) видимости Vi для каждого пикселя.
8. Фазоконтрастная радиографическая система по п. 1, причем система является системой маммографического сканера или системой сканера компьютерной томографии, CT.
9. Способ обработки данных, выдаваемых фазоконтрастным радиографическим устройством сканирующего типа, включащим в себя интерферометр, причем упомянутый способ содержит этапы, на которых:
принимают (S610) последовательность считываний детектора, которые вместе регистрируют дрейфующую муаровую картину, причем считывания обнаружены множеством пикселей детектора упомянутого устройства во время операции контрольного сканирования, при этом дрейф вызван относительным движением по меньшей мере двух решеток упомянутого интерферометра во время упомянутой операции сканирования;
аппроксимируют (S615) считывания к функции f модели сигнала измерения, находя для значений параметров калибровки, включающих в себя множество фаз (ϕl) дрейфующей муаровой картины и/или по меньшей мере одно из: i) интенсивности (Ai) для каждого пикселя или ii) видимости (Vi) для каждого пикселя; и
регулируют (S605) жесткость рамы и/или крепления интерферометра путём приложения силы к креплению интерферометра или к раме, имеющей крепление интерферометра, таким образом, чтобы управлять величиной дрейфа муаровой картины.
10. Способ по п. 9, в котором операция аппроксимации содержит нахождение пиксельного смещения (Δi) для каждого пикселя.
11. Способ по любому из пп. 9 или 10, содержащий этап, на котором:
применяют (S620b) операцию получения фазы к считываниям детектора для контрольного сканирования, чтобы создать по меньшей мере одно скорректированное фазоконтрастное изображение.
12. Способ по п. 9, содержащий этапы, на которых:
сканируют (S620a) изображаемый объект, чтобы получить считывания детектора для объекта;
используют по меньшей мере одно скорректированное фазоконтрастное изображение при применении (S625) операции получения фазы к считываниям детектора для объекта, чтобы получить фазоконтрастное изображение объекта.
13. Машиночитаемый носитель для осуществления способа обработки данных, выдаваемых фазоконтрастной радиографической системой, причём на машиночитаемом носителе сохранён компьютерный программный элемент, который при выполнении процессором выполнен с возможностью осуществления этапов способа по любому из пп. 9-12.
| US 2012288056 A1, 15.11.2012 | |||
| US 2013201198 A1, 08.08.2013 | |||
| US 2007183583 A1, 09.08.2007 | |||
| C | |||
| Kottler et al | |||
| Grating interferometer based scanning setup for hard x-ray phase contrast imaging, REVIEW OF SCIENTIFIC INSTRUMENTS 78, 2007, 043710-1 - 043710-4 | |||
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕНТГЕНОВСКИХ ИЗОБРАЖЕНИЙ И СПОСОБ ФОРМИРОВАНИЯ РЕНТГЕНОВСКИХ ИЗОБРАЖЕНИЙ | 2009 |
|
RU2472137C1 |

