Область изобретения
Настоящее изобретение, в целом, относится к способам обнаружения разбалансировки отношения воздуха к топливу в цилиндрах, и к соответствующим системам.
Существующий уровень техники и краткое описание изобретения В современных транспортных средствах для дополнительной обработки выхлопных газов бензиновых двигателей используют трехкомпонентные каталитические нейтрализаторы (ТКН). Из-за ужесточающихся законодательных требований к автомобильным выбросам для правильного регулирования отношения воздуха к топливу (ОВТ) в двигателе используют управление с обратной связью. Некоторые транспортные средства оснащены универсальным датчиком кислорода выхлопных газов (УКВГ), расположенным перед ТКН по ходу потока, и нагреваемым датчиком кислорода в выхлопных газах (НКВГ), расположенным за ТКН по ходу потока, предназначенными для поддержания ОВТ около стехиометрического соотношения. Управление ОВТ в цилиндрах с обратной связью обеспечивается поддержанием требуемого ОВТ, близкого к стехиометрическому, которое, в свою очередь, точно регулируется по сигналу отклонения напряжения НКВГ от заранее установленного значения напряжения НКВГ.
Однако, физическая геометрия и расположение цилиндров создают в системе выпуска условия неравномерного и зонированного потока выхлопных газов, что усложняет определение ОВТ в цилиндрах. Различные условия, такие как разбалансировка ОВТ различных цилиндров, могут усугублять эти условия неравномерного и зонированного потока выхлопных газов, в результате чего датчик УКВГ может работать не одинаково для всех цилиндров. Разбалансировка ОВТ в различных цилиндрах возникает в том случае, если ОВТ в одном или нескольких цилиндрах отличается от ОВТ в других цилиндрах из-за индивидуальных условий в цилиндрах, таких как утечка во впускном коллекторе около одного конкретного цилиндра, засоренный инжектор топлива, разбалансировка канала рециркуляции
выхлопных газов отдельного цилиндра, или проблемы с подачей топлива. Из-за зонирования потока выхлопа цилиндр с разбалансировкой отношения воздуха к топливу может быть обнаружен только при относительно высокой разбалансировке. Поэтому небольшие разбалансировки могут оставаться не обнаруженными, что приводит к существенным выбросам неочищенных газов, таких как монооксид углерода (СО), или оксиды азота (NOx), проходящих непосредственно в выхлопную трубу, поскольку неоптимальная смесь воздуха с топливом подается непосредственно в каталитический нейтрализатор, переполняя буфер накопления кислорода, позволяющий недолгие отклонения от стехиометрического соотношения.
Авторы настоящего изобретения осознают вышеупомянутые недостатки, и разработали различные подходы к их устранению. В частности, предложены системы и способы для обеспечения технического результата, заключающегося в определении и устранении условий разбалансировки отношения воздуха к топливу в конкретном цилиндре двигателя. В одном из примеров способ содержит регулирование работы двигателя на основании информации о разбалансировке отношения воздуха к топливу в цилиндре, причем разбалансировку отношения воздуха к топливу в цилиндре определяют на основе выходного сигнала второго датчика и множества отдельных весовых коэффициентов отдельного цилиндра, при этом второй датчик расположен в выпускной системе по ходу потока за первым датчиком, расположенным в выпускной системе.
Таким образом, разбалансировка отношения воздуха к топливу в цилиндре может быть обнаружена на основе состава выхлопных газов, измеренного вторым датчиком выхлопных газов. Выхлопные газы, проходящие второй датчик выхлопных газов, являются относительно гомогенной смесью выхлопных потоков всех цилиндров, поэтому измерение отношения воздуха к топливу одинаково для каждого из цилиндров. С целью определения отношения воздуха к топливу в каждом цилиндре при оценке только смеси выхлопных газов, но не отдельных струй, соответствующих каждому отдельному цилиндру, к выходному сигналу второго датчика выхлопных газов применяют множество весовых коэффициентов отдельных цилиндров. Упомянутое множество весовых коэффициентов отдельных цилиндров может отражать вклад каждого из цилиндров в отношение воздуха к топливу, определенное вторым датчиком выхлопных газов во множестве различных условий работы двигателя.
Должно быть ясно, что приведенное выше краткое описание приведено для ознакомления в упрощенном виде с набором идей, более подробно раскрытых в подробном описании. Оно не предназначено для определения ключевых или обязательных признаков истребуемого объема изобретения, объем которого определен исключительно формулой изобретения, следующей за подробным описанием. Кроме того, заявленный объем изобретения не ограничен вариантами осуществления, в которых устранены недостатки, указанные выше или в любой части настоящего документа.
Краткое описание чертежей
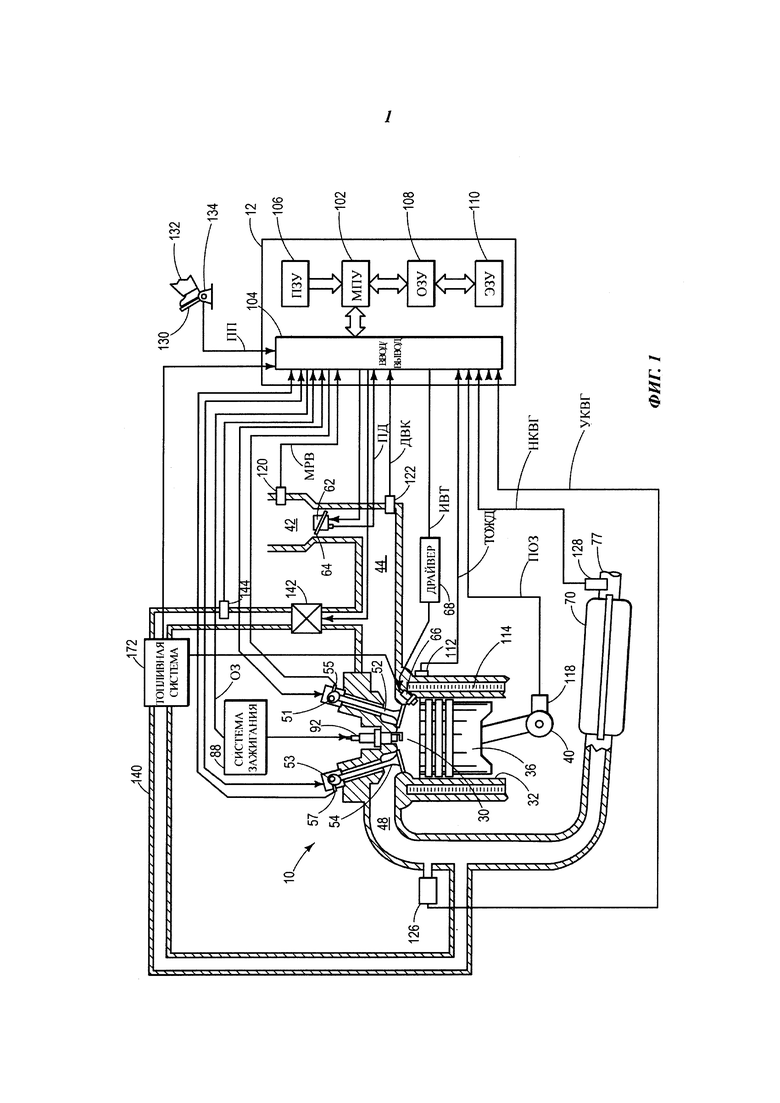
На фиг. 1 представлена схема системы двигателя, иллюстрирующая один цилиндр многоцилиндрового двигателя.
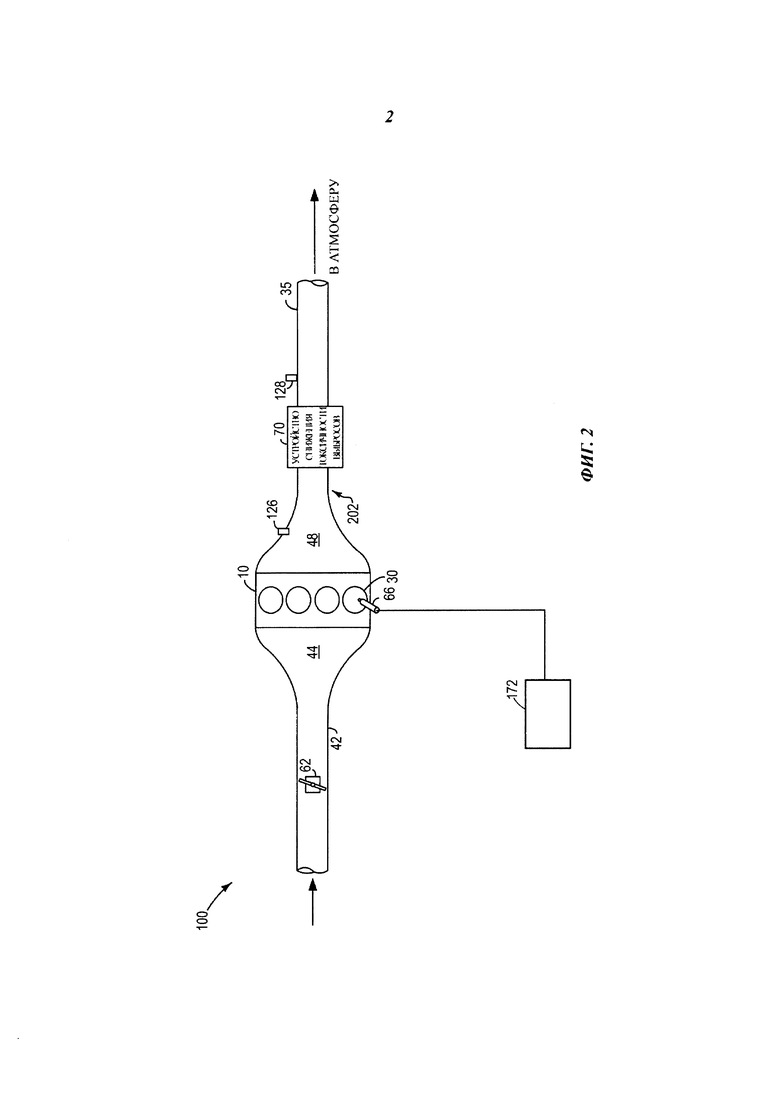
На фиг. 2 представлена схема системы двигателя, показанной на фиг. 1, содержащей многоцилиндровый двигатель.
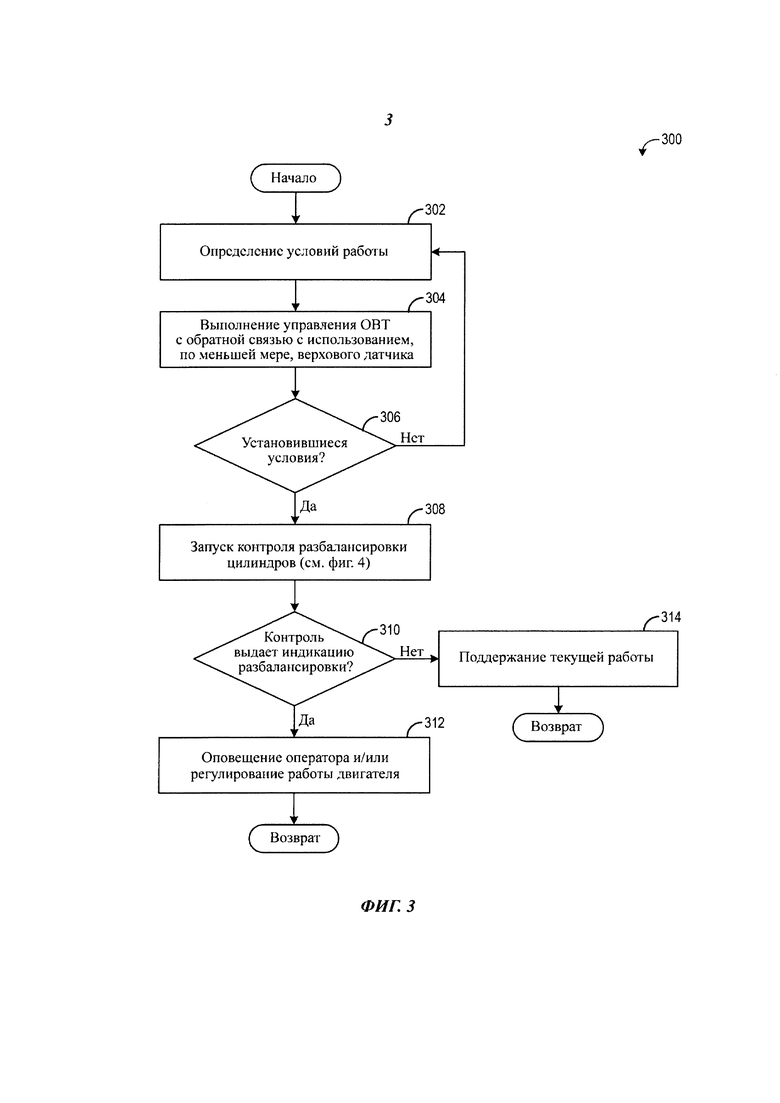
На фиг. 3 представлена высокоуровневый алгоритм, иллюстрирующий способ определения разбалансировки отношения воздуха к топливу в цилиндре.
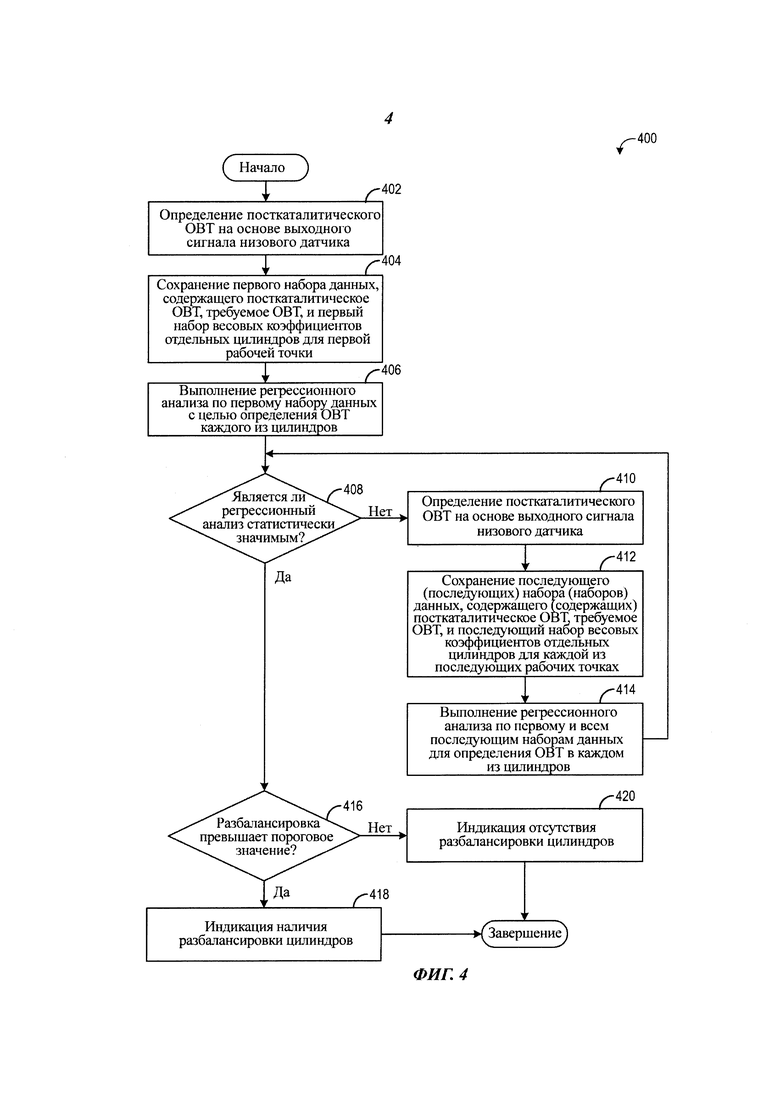
На фиг. 4 представлен алгоритм, иллюстрирующий способ обнаружения разбалансировки отношения воздуха к топливу в отдельном цилиндре с использованием низового датчика.
Подробное описание
Следующее описание относится к системам и способам для обнаружения разбалансировки отношения воздуха к топливу в цилиндре с использованием посткаталитического датчика выхлопных газов. Разбалансировка отношения воздуха к топливу в цилиндре может способствовать повышенному загрязнению выхлопными газами, поэтому система двигателя может осуществлять контроль разбалансировки отношения воздуха к топливу в цилиндре и регулировать работу двигателя и/или уведомлять оператора в случае обнаружения разбалансировки отношения воздуха к топливу в цилиндре. Обычно контроль разбалансировки цилиндров осуществляется с использованием датчика выхлопных газов, расположенного перед каталитическим нейтрализатором по ходу потока, где могут быть обнаружены отдельные «струи» слишком богатых или обедненных выхлопных газов, проходящие этот датчик выхлопных газов. Однако, этот датчик выхлопных газов может определять состав выхлопа из каждого из цилиндров не одинаковым образом. Например, на способность датчика одинаково контролировать каждый из цилиндров могут оказывать влияние геометрия выпускного коллектора, расположение датчика, а также состав выхлопных газов. Таким образом, может быть сложно отличить действительную разбалансировку цилиндра, для которого датчик обладает слабой чувствительностью, от нормальной работы цилиндра, для которого датчик обладает сильной чувствительностью. Другим недостатком такого контроля является необходимость опроса и обработки данных этого датчика выхлопных газов с относительно высокой частотой. Это создает существенную хронометрическую нагрузку на контроллер транспортного средства при высоких скоростях вращения двигателя, в результате чего в некоторых рабочих режимах контроль становится невозможен.
В соответствии с раскрытыми в настоящей заявке вариантами осуществления, для контроля разбалансировки отношения воздуха к топливу в цилиндре может опрашиваться посткаталитический датчик выхлопных газов (например, низовой датчик). В раскрытом варианте контроля осуществляется определение изменения состава посткаталитического газа в различных режимах работы (например, в различных условиях по нагрузке и скорости). Посткаталитические выхлопные газы являются смесью выхлопных газов из всех цилиндров одного ряда. Однако, состав смеси определяется с погрешностью, которая зависит от коэффициента чувствительности докаталитического датчика, относящегося к отдельным цилиндрам (например, верхового датчика выхлопных газов). В результате, посткаталитический состав газа сильно зависит от чувствительности верхового датчика по отношению к каждому из цилиндров в определенных условиях работы.
В процессе схематизации может быть количественно определена чувствительность в различных условиях по скорости и нагрузке. Динамическая чувствительность верхового датчика может быть использована в качестве источника естественных или пассивных помех. В течение обычного ездового цикла двигатель работает во множестве различных условий по скорости и нагрузке. Вклад каждого цилиндра в измерения и результирующее отношение воздуха к топливу может быть сохранен с образованием набора данных со значениями во всем рабочем диапазоне. Посредством регрессии на основе набора данных может быть установлен приблизительный вклад каждого из цилиндров в определенном ряду.
Такой вид обработки может быть осуществлен с относительно небольшой скоростью, поскольку газы, используемые для определения разбалансировки цилиндров, смешиваются и фильтруются в каталитическом нейтрализаторе. Поэтому нет никаких преимуществ в частом опрашивании датчика. Данные для каждого из условий по скорости и нагрузке могут быть усреднены по определенному периоду времени, и усредненное значение может быть использовано при регрессии, для снижения хронометрической нагрузки. На фиг. 1-2 изображена система двигателя, содержащая первый, верховой датчик, и второй, низовой датчик для контроля разбалансировки цилиндров. Система двигателя, представленная на фиг. 1-2, дополнительно содержит контроллер, в котором записаны команды для реализации описанных здесь способов и алгоритмов, таких как способы, проиллюстрированные на фиг. 3-4.
На фиг. 1-2 схематически представлена система 100 двигателя, содержащая многоцилиндровый двигатель 10, который может входить в состав двигательной установки автомобиля. На фиг. 1 представлен один цилиндр многоцилиндрового двигателя 10, тогда как на фиг. 2 показаны все цилиндры двигателя 10. Управление двигателем 10 может осуществляться, по меньшей мере, частично, посредством системы управления, содержащей контроллер 12, и посредством входных сигналов от оператора 132 транспортного средства, передаваемых через устройство 130 ввода. В данном примере устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали, выдающий пропорциональный сигнал положения педали (ПП). Камера 30 сгорания (то есть, цилиндр) двигателя 10 может содержать стенки 32 камеры сгорания, и расположенный в ней поршень 36. Поршень 36 может быть соединен с коленчатым валом 40 с возможностью преобразования возвратно-поступательного движения поршня во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен, по меньшей мере, с одним ведущим колесом транспортного средства через промежуточную трансмиссию. Кроме того, через маховик с коленчатым валом может быть соединен двигатель стартера, обеспечивающий запуск двигателя 10.
Камера 30 сгорания может получать впускной воздух из впускного коллектора 44 через канал 42, и может осуществлять выпуск продуктов сгорания через выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 48 могут быть связаны с камерой 30 сгорания с возможностью переключения, соответственно, через впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления камера 30 сгорания может содержать два или большее количество впускных клапанов и/или два или большее количество выпускных клапанов. В данном примере управление впускным клапаном 52 и выпускным клапаном 54 может осуществляться кулачковым приводом через один или большее количество кулачков, и при этом могут использоваться одна или несколько из нижеперечисленных систем, а именно систем переключения профилей кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ), и/или изменения высоты подъема клапанов (ИВПК), которыми может управлять контроллер 12 для изменения работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 может быть определено посредством датчиков 55 и 57 положения, соответственно. В альтернативных вариантах осуществления управление впускным клапаном 52 и/или выпускным клапаном 54 может быть реализовано посредством электрического привода. Например, в качестве альтернативы, цилиндр 30 может содержать впускной клапан, управляемый электрическим приводом, и выпускной клапан, управляемый кулачковым приводом, оснащенным системой ППК и/или ИФКР.
В некоторых вариантах осуществления каждый цилиндр двигателя 10 может быть оснащен одним или несколькими топливными инжекторами для подачи в него топлива. В качестве не ограничивающего примера, цилиндр 30 показан содержащим один топливный инжектор 66, топливо в который подается из топливной системы 172. Топливный инжектор 66 показан непосредственно соединенным с цилиндром 30 для прямого впрыска в него топлива в количестве, пропорциональном ширине впрыска топлива (ИВТ), получаемого от контроллера 12 через электронный драйвер 68. Таким образом, топливный инжектор 66 осуществляет так называемый непосредственный впрыск (далее в настоящей заявке также упоминаемый как «НВ») топлива в цилиндр 30 сгорания.
Должно быть ясно, что в альтернативных вариантах осуществления инжектор 66 может быть инжектором распределенного впрыска, подающим топливо во впускной порт, расположенный перед цилиндром 30 по ходу потока. Также должно быть ясно, что топливо в цилиндр 30 может подаваться из множества инжекторов, такого как множество инжекторов распределенного впрыска, множество инжекторов непосредственного впрыска, или их сочетание.
Как показано на фиг. 1, впускной канал 42 может содержать дроссель 62, содержащий дроссельную заслонку 64. В данном конкретном примере контроллер 12 может изменять положение дроссельной заслонки 64 посредством сигнала, подаваемого на электрический двигатель или привод, входящий в состав дросселя 62, в так называемой системе электронного управления дросселем (ЭУД). Таким образом, работа дросселя 62 может обеспечивать изменение количества впускного воздуха, подаваемого в камеру 30 сгорания, а также другие цилиндры двигателя. Положение дроссельной заслонки 64 может передаваться контроллеру 12 в виде сигнала положения дросселя (ПД). Впускной канал 42 может содержать датчик 120 массового расхода воздуха (МРВ) и датчик 122 давления воздуха в коллекторе (ДВК), передающие контроллеру 12 соответствующие сигналы МРВ и ДВК.
Система зажигания 88, в определенных режимах работы, в ответ на сигнал опережения зажигания (ОЗ) от контроллера 12 может подавать в камеру 30 сгорания искру зажигания через свечу 92 зажигания. Несмотря на то, что показаны компоненты искрового зажигания, в некоторых вариантах осуществления камера 30 сгорания или одна или большее количество камер сгорания двигателя 10 могут работать в режиме воспламенения от сжатия с искрой зажигания или без нее.
Первый, верховой датчик 126 выхлопных газов показан соединенным с выпускным каналом 48 перед устройством 70 снижения токсичности выбросов по ходу потока. Верховой датчик 126 может быть любым подходящим датчиком для определения отношения воздуха к топливу в выхлопных газах, таким как линейный широкополосный датчик кислорода или УКВГ (универсальный или широкополосный датчик кислорода в выхлопных газах), В одном из вариантов осуществления верховой датчик 126 выхлопных газов является датчиком УКВГ, выполненным с возможностью выдачи сигнала, такого как сигнал напряжения, пропорционального количеству присутствующего в выхлопе кислорода. Контроллер 12 использует этот выходной сигнал для определения отношения воздуха к топливу в выхлопе.
Устройство 70 снижения токсичности выбросов 70 показано расположенным вдоль выпускного канала 48 за датчиком 126 выхлопных газов по ходу потока. Устройство 70 может быть трехкомпонентным каталитическим нейтрализатором ТКН, выполненным с возможностью снижения количества NOx и доокисления СО и несгоревших углеводородов. В некоторых вариантах осуществления устройство 70 может быть ловушкой NOx, другим устройством снижения токсичности выбросов, или их сочетанием.
Второй, низовой датчик 128 выхлопных газов показан соединенным с выпускным каналом 48 за устройством 70 снижения токсичности выбросов по ходу потока. Низовой датчик 128 может быть любым подходящим датчиком для определения отношения воздуха к топливу в выхлопных газах, таким как датчик УКВГ, КВГ (кислорода в выхлопных газах), НКВГ и так далее. В одном из вариантов осуществления низовой датчик 128 является датчиком НКВГ, выполненным с возможностью определения относительной обогащенности или обедненности выхлопных газов после прохождения через каталитический нейтрализатор. Таким образом, датчик НКВГ может обеспечивать выходной сигнал в виде точки переключения, или сигнала напряжения, соответствующего точке, в которой выхлопной газ переходит из обедненного состояния в обогащенное. В настоящем документе под низовым датчиком понимается датчик, расположенный в системе выпуска по направлению потока выпуска за верховым датчиком системы выпуска. Кроме того, верховой датчик может быть расположен перед устройством снижения токсичности выбросов, таким как каталитический нейтрализатор, тогда как низовой датчик может быть расположен за устройством снижения токсичности выбросов по направлению потока выхлопа. Таким образом, выпускной поток, выходящий из множества цилиндров, протекает мимо верхового датчика перед протеканием мимо низового датчика.
Кроме того, как раскрыто в вариантах осуществления, система рециркуляции выхлопных газов (РВГ) может перенаправлять выхлопные газы в необходимой пропорции из выпускного канала 48 во впускной канал 42 через канал 140 РВГ. Регулирование количества рециркулированных выхлопных газов, подаваемого во впускной канал 42, может осуществляться контроллером 12 посредством клапана 142 РВГ. Кроме того, внутри канала РВГ может быть предусмотрен датчик 144 РВГ, обеспечивающий измерение давления и/или температуры и/или концентрации выхлопных газов. В некоторых условиях система РВГ может использоваться для регулирования температуры топливо-воздушной смеси в камере сгорания.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, содержащего микропроцессорное устройство 102 (МПУ), порты 104 ввода/вывода, электронное запоминающее устройство для исполняемых программ и калибровочных значений, показанное в данном конкретном примере в виде микросхемы 106 постоянного запоминающего устройства (ПЗУ), оперативное запоминающее устройство 108 (ОЗУ), энергонезависимое запоминающее устройство 110 (ЭЗУ) и шину данных. Контроллер 12 может получать различные сигналы от датчиков, соединенных с двигателем 10, в том числе, в дополнение к вышеописанным примерам, измеренный массовый расход засасываемого воздуха МРВ от датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ТОЖД) от датчика 112 температуры, соединенного с рукавом 114 охлаждения; сигнал профильного определения зажигания (ПОЗ) от датчика 118 Холла (или датчика другого типа), соединенного с коленчатым валом 40; сигнал положения дросселя (ПД) от датчика положения дросселя; и сигнал абсолютного давления в коллекторе (ДВК) от датчика 122. Скорость вращения двигателя, число оборотов в минуту, может быть определена контроллером 12 на основе сигнала (ПОЗ).
В постоянном запоминающем устройстве 106 могут быть записаны машиночитаемые данные, представляющие собой постоянные команды, исполняемые процессором 102 для реализации способов, описанных ниже, а также других вариантов, которые предполагаются, но не приведены отдельно.
Как описано выше, на фиг. 1 представлен только один цилиндр многоцилиндрового двигателя, и каждый из цилиндров может аналогичным образом содержать свой набор впускных/выпускных клапанов, топливный инжектор, свечу зажигания, и так далее.
Как отмечено выше, первый, верховой датчик выхлопных газов (датчик 126 на фиг. 1-2) может обладать различной чувствительностью для выхлопа из различных цилиндров. Как показано на фиг. 2, верховой датчик 126 может быть расположен перед зоной 202 слияния в системе выпуска, где происходит слияние потоков выхлопа из всех цилиндров ряда цилиндров. Из-за расположения верхового датчика 126 этот датчик может не обладать одинаковой чувствительностью для всех цилиндров во всех режимах по скорости и нагрузке. Например, верховой датчик 126 может быть расположен ближе к первому цилиндру двигателя 10, нежели к остальным цилиндрам; он может быть расположен дальше всего от четвертого цилиндра (например, цилиндра 30 на фиг. 2) двигателя. В результате этого, по меньшей мере, в некоторых условиях, замер выхлопа из первого цилиндра может осуществляться с наибольшей чувствительностью.
Напротив, датчик выхлопных газов, расположенный за зоной слияния (например, низовой датчик 128) осуществляет замеры смешанного и отфильтрованного выхлопного потока, в котором выхлоп из всех цилиндров ряда цилиндров смешан с образованием гомогенного потока. Таким образом, низовой датчик выхлопных газов может одинаковым образом измерять вклад каждого из цилиндров в отношение воздуха к топливу в выхлопных газах в низовой точке по ходу потока.
Как будет описано более подробно со ссылкой на фиг. 3, разбалансировка отношения воздуха к топливу в цилиндре может быть обнаружена низовым датчиком выхлопных газов, несмотря на то, что низовой датчик измеряет только смешанные выхлопные газы, и, поэтому, не оценивает отдельные струи выхлопа, относящиеся к потокам выхлопа отдельных цилиндров. Это осуществляется за счет использования вариаций, обусловленных неравномерным измерением низовых выхлопных газов, в качестве пассивных помех в низовом потоке выхлопных газов, которые могут быть использованы для обнаружения факта работы одного или нескольких цилиндров при разбалансировке отношения воздух-топливо.
Обращаясь теперь к фиг. 3, рассмотрим способ 300 обнаружения разбалансировки отношения воздуха к топливу в цилиндре. Способ 300 может быть реализован контроллером, таким как контроллер 12, представленный на фиг. 1, в соответствии с записанными в нем постоянными командами, с целью обеспечения управления отношением воздуха к топливу в двигателе, таком как двигатель 10, изображенный на фиг. 1-2, на основе обратной связи от первого, верхового датчика выхлопных газов (такого как верховой датчик 126 на фиг. 1-2) и второго, низового датчика выхлопных газов (такого как низовой датчик 128 на фиг. 1-2). Способ 300 также содержит контроль разбалансировки в цилиндрах, при котором определяют отношение воздуха к топливу в отдельных цилиндрах на основе выходного сигнала низового датчика выхлопных газов.
На этапе 302 способ 300 содержит определение условий работы двигателя. Определяемые условия могут содержать, но не ограничены, следующими: скорость вращения двигателя, нагрузка двигателя, выходной сигнал верхового и/или низового датчика выхлопных газов, и другие условия работы. На этапе 304 способ 300 содержит реализацию управления отношением воздуха к топливу (ОВТ) с обратной связью на основе выходного сигнала, по меньшей мере, верхового датчика выхлопных газов. Управление ОВТ с обратной связью может содержать регулирование количества впрыскиваемого топлива для поддержания требуемого ОВТ. Например, для соответствия ОВТ требуемому может быть определено отклонение выходного сигнала верхового датчика от требуемого ОВТ, и может быть осуществлено регулирование одного или большего количества инжекторов двигателя для подачи требуемого количества топлива. В некоторых примерах для управления ОВТ с обратной связью может также использоваться выходной сигнал низового датчика выхлопных газов. Требуемое ОВТ может быть определено, например, на основании скорости вращения и нагрузки двигателя.
На этапе 306 в способе 300 определяют, работает ли двигатель в установившемся состоянии. Установившееся состояние может содержать остающиеся относительно неизменными скорость вращения и/или нагрузку, например, изменяющиеся в течение определенного времени менее чем на пороговую величину. Если нет, способ 300 возвращается к этапу 302 для продолжения отслеживания условий работы и реализации управления ОВТ с обратной связью. Если двигатель работает в установившемся состоянии, способ 300 продолжается на этапе 308 запуском контроля разбалансировки цилиндров, который более подробно описан ниже со ссылкой на фиг. 4. Вкратце, при контроле разбалансировки цилиндров осуществляется дискретизация выходного сигнала низового датчика выхлопных газов, и использование этого дискретного сигнала, совместно с требуемым ОВТ для верхового датчика и множеством весовых коэффициентов отдельных цилиндров, для вычисления отношений воздуха к топливу отдельных цилиндров. При наличии разбалансировки ОВТ в одном из цилиндров (например, если в одном из цилиндров ОВТ отличается от ОВТ других цилиндров), может быть осуществлена индикация разбалансировки цилиндра. С целью выдачи более достоверных данных контроль разбалансировки цилиндров может быть запущен в условиях установившегося состояния, но не в переходных условиях (например, отношение воздуха к топливу в цилиндре может слишком сильно изменяться в переходных условиях, усложняя обнаружение разбалансировки цилиндра).
На этапе 310 определяют, осуществляет ли контроль разбалансировки индикацию о работе двигателя с разбалансировкой цилиндра. Если осуществляется индикация разбалансировки цилиндра, способ 300 продолжается на этапе 312 оповещением оператора о разбалансировке и/или регулировании работы двигателя. С целью оповещения оператора может быть включена лампа индикации неисправности, может быть сохранен диагностический код в запоминающем устройстве контроллера, или может быть выполнено другое действие. Кроме того, регулирование работы двигателя может содержать регулирование количества впрыскиваемого топлива в разбалансированный цилиндр, снижение крутящего момента двигателя, регулирование момента зажигания, регулирование момента впрыска, или другое изменение работы двигателя для удержания выбросов в установленных пределах. Кроме того, контроль разбалансировки цилиндров позволяет определять, какой именно цилиндр разбалансирован, и является ли разбалансировка цилиндра разбалансировкой обеднения (при которой цилиндр работает при слишком обедненной смеси воздуха с топливом) или разбалансировкой обогащения (при которой цилиндр работает при слишком обогащенной смеси воздуха с топливом). Если разбалансировка цилиндра указывает на разбалансировку обеднения, количество впрыскиваемого в цилиндр топлива может быть увеличено, а если разбалансировка цилиндра указывает на разбалансировку обогащения, количество впрыскиваемого в цилиндр топлива может быть уменьшено.
Если контроль разбалансировки не указывает на разбалансировку, способ 300 продолжается на этапе 314 поддержанием текущей работы, в том числе осуществлением управления отношением воздуха к топливу с обратной связью. После этого способ 300 возвращается к началу.
Таким образом, описанный выше способ 300 реализует контроль разбалансировки цилиндров при установившихся условиях работы с целью определения разбалансировки цилиндров на основе выходных сигналов низового датчика выхлопных газов. Поскольку за каталитическим нейтрализатором по ходу потока выхлоп является относительно гомогенной смесью потоков выхлопа из всех цилиндров двигателя или ряда цилиндров, отношение воздуха к топливу в низовой точке по ходу потока не отражает отношение воздуха к топливу каждого из цилиндров, независимо от того, как часто опрашивается низовой датчик выхлопных газов. Однако верховой датчик выхлопных газов не осуществляет измерение отдельных струй выхлопа каждого из цилиндров, и, кроме того, не измеряет выхлоп каждого из цилиндров одинаковым образом во всех режимах по скорости вращения и нагрузке двигателя. Поскольку регулирование отношения воздуха к топливу в каждом из цилиндров основано на выходном сигнале верхового датчика выхлопных газов, как описано выше в отношении управления отношением воздуха к топливу с обратной связью, общий состав выхлопных газов за каталитическим нейтрализатором отражает неодинаковое измерение отношения воздуха к топливу в низовой точке по ходу потока. Неодинаковое измерение отношения воздуха к топливу в низовой точке по ходу потока может быть оценено и использовано для определения множества весовых коэффициентов отдельных цилиндров, которые отражают погрешность измерения верхового датчика при различных режимах работы по скорости вращения и нагрузке. Эти весовые коэффициенты отдельных цилиндров могут быть использованы вместе с измеренным значением отношения воздуха к топливу в низовой точке по ходу потока и требуемым значением отношения воздуха к топливу в низовой точке по ходу потока в одном или нескольких режимах работы для осуществления регрессионного анализа с целью определения отношения воздуха к топливу каждого отдельного цилиндра.
На фиг. 4 представлен способ 400 определения отношения воздуха к топливу в цилиндре на основании выходного сигнала второго, низового (например, посткаталитического) датчика выхлопных газов. Способ 400 может быть реализован контроллером 12 в соответствии с записанными в нем постоянными командами, и выполнен в качестве части описанного выше способа 300 (например, способ 400 может быть выполнен сразу после запуска контроля разбалансировки цилиндров в способе 300).
На этапе 402 способ 400 содержит определение посткаталитического отношения воздуха к топливу на основе выходного сигнала второго, низового датчика выхлопных газов. На этапе 404 осуществляется сохранение (например, в запоминающем устройстве контроллера) первого набора данных. Первый набор данных содержит, для первого условия работы двигателя, посткаталитическое отношение воздуха к топливу, определенное на этапе 402, соответствующее требуемое значение отношения воздуха к топливу для первого, верхового датчика выхлопных газов (например, отношение воздуха к топливу, используемое контроллером вместе с выходным сигналом верхового датчика для реализации управления ОВТ с обратной связью в то же время, в которое определяется посткаталитическое отношение воздуха к топливу), и первый набор весовых коэффициентов отдельных цилиндров. Например, при опрашивании низового датчика выхлопных газов для определения отношения воздуха к топливу вместе с соответствующим требуемым отношением воздуха к топливу определяют скорость вращения двигателя и нагрузку во время опрашивания. Эти значения сохраняют в первом наборе данных вместе с первым набором весовых коэффициентов отдельных цилиндров.
Первый набор весовых коэффициентов отдельных цилиндров содержит вклад каждого из цилиндров в измеренное докаталитическое отношение воздуха к топливу (например, отношение воздуха к топливу, измеренное верховым датчиком выхлопных газов) при определенных выше скорости вращения и нагрузке двигателя. Первый набор весовых коэффициентов отдельных цилиндров может быть выбран из множества весовых коэффициентов отдельных цилиндров, каждый из которых отражает вклад определенных цилиндров в измеренное докаталитическое отношение воздуха к топливу при определенных условиях по скорости вращения и нагрузке. Множество весовых коэффициентов отдельных цилиндров может быть сохранено в виде структуры данных в запоминающем устройстве контроллера.
Множество весовых коэффициентов отдельных цилиндров может быть определено подходящим образом. Например, множество весовых коэффициентов отдельных цилиндров может быть определено в режиме обучения двигателя. В режиме обучения двигателя отношение воздуха к топливу каждого из цилиндров может быть намеренно изменено (например, работа цилиндра может быть намеренно настроена на обогащенную или обедненную) последовательно от одного цилиндра к другому, и каждое результирующее отношение воздуха к топливу, измеренное верховым датчиком, может быть сохранено вместе со скоростью вращения и нагрузкой, соответствующими времени измерения отношения воздуха к топливу. Этот процесс может быть повторен в течение одного или нескольких циклов работы двигателя с целью сбора отношений воздуха к топливу при множестве различных условий скоростей вращения и нагрузки двигателя. Эти данные могут быть использованы для определения множества весовых коэффициентов отдельных цилиндров.
Например, в четырехцилиндровом двигателе (или в одном ряду V-образного восьмицилиндрового двигателя) без учета погрешности измерения верхового датчика выхлопных газов, вклад каждого цилиндра (например, цилиндров 1-4) составляет 25% общих измеренных выхлопных газов. Однако, из-за расположения верхового датчика реальный вклад каждого из цилиндров может не быть равен 25%, и может изменяться в зависимости от скорости вращения двигателя и нагрузки. В одном из примеров, при низкой скорости вращения двигателя и низкой нагрузке, вклад каждого из цилиндров 1 и 2 может составлять 31,25%, вклад цилиндра 3 может составлять 15%, и вклад цилиндра 4 может составлять 22,5% выхлопных газов, измеряемых верховым датчиком выхлопных газов. Напротив, при высокой скорости вращения двигателя и средней нагрузке, вклад цилиндра 1 может составлять 15%, вклад цилиндра 2 может составлять 22,5%, вклад цилиндра 3 может составлять 28,75%, и вклад цилиндра 4 может составлять 33,75% выхлопных газов, измеряемых верховым датчиком выхлопных газов. Упомянутое множество весовых коэффициентов отдельных цилиндров может отражать вклад каждого из цилиндров в отношение воздуха к топливу, определенное вторым датчиком выхлопных газов во множестве различных условий работы двигателя.
Таким образом, возвращаясь к этапу 404 способа 400, если посткаталитическое отношение воздуха к топливу определено при первых скорости вращения двигателя и нагрузке (таких как описанные выше условия низкой скорости вращения и низкой нагрузки), первый набор весовых коэффициентов отдельных цилиндров содержит весовой коэффициент отдельного цилиндра для каждого из цилиндров в режиме работы, соответствующем низкой скорости вращения и низкой нагрузке. В описанном выше примере первый набор весовых коэффициентов отдельных цилиндров может содержать значения 0,3125, 0,3125, 0,15 и 0,225 для цилиндров 1-4, соответственно. Должно быть ясно, что приведенные значения весовых коэффициентов отдельных цилиндров по своей природе являются примерами, поскольку возможны другие значения или варианты представления. Например, весовые коэффициенты отдельных цилиндров могут быть представлены в виде процентов или в другом подходящем виде.
На этапе 406 осуществляется регрессионный анализ первого набора данных с целью определения отношения воздуха к топливу для каждого цилиндра. Как описано выше, выходной сигнал низового датчика выхлопных газов не является непосредственно результатом измерения отношения воздуха к топливу в каждом отдельном цилиндре (из-за того факта, что низовой датчик является узкополосным датчиком, и поскольку он осуществляет измерение однородной смеси выхлопов из всех цилиндров). Однако, отношение воздуха к топливу в каждом из цилиндров может быть получено из других измерений в соответствии с уравнением:
[ϕOuter]=[Ccyl][βcyl][ϕInner]+[ϕbias]
где [ϕOuter] является отношением воздуха к топливу, измеренным вторым, низовым датчиком выхлопных газов, [Ccyl] является неизвестным вкладом определенного цилиндра в отношение воздуха к топливу, [βcyl] - весовой коэффициент этого цилиндра, [ϕInner] - требуемое отношение воздуха к топливу на первом, верховом датчике выхлопных газов, и [ϕbias] - компенсация погрешности низового датчика выхлопных газов.
Значения [Ccyl] для каждого из цилиндров могут быть определены посредством регрессионного анализа. Регрессионный анализ позволяет определить значение одной или нескольких неизвестных независимых переменных (например, [Ссу1] каждого из цилиндров) на основе зависимой переменной (в данном случае, отношения воздуха к топливу в низовой точке по ходу потока) и дополнительных известных независимых переменных (например, требуемого отношения воздуха к топливу). Регрессионный анализ может быть подходящим регрессионным анализом, таким как параметрический или не параметрический, линейный или не линейный, и так далее.
На этапе 408 определяют, является ли регрессионный анализ статистически значимым. Это может быть определено подходящим образом. В одном из примеров регрессионный анализ может лишь обеспечивать достоверную оценку [Ccyl] каждого из цилиндров при измерении зависимой переменной при нескольких различных значениях известных зависимых переменных. Например, в четырехцилиндровом двигателе (или ряде цилиндров, содержащем четыре цилиндра) необходимы четыре значения [Ccyl] (например, одно для каждого цилиндра). Таким образом, отношение воздуха к топливу в низовой точке по ходу потока может быть измерено, по меньшей мере, при четырех различных требуемых значениях отношения воздуха к топливу и/или при четырех различных условиях по скорости вращения двигателя и нагрузке. Кроме того, отношение воздуха к топливу в низовой точке по ходу потока может быть измерено для каждой из независимых переменных более чем один раз.
Если определено, что регрессионный анализ не является статистически значимым, способ 400 переходит на этап 410 для того, чтобы вновь определить посткаталитическое отношение воздуха к топливу на основе выходного сигнала низового датчика, сохранить последующий набор данных на этапе 412, который содержит посткаталитическое отношение воздуха к топливу, измеренное на этапе 410, соответствующее требуемое отношение воздуха к топливу для верхового датчика и последующий набор весовых коэффициентов отдельных цилиндров для последующей рабочей точки (например, для тех же частоты вращения и нагрузки двигателя для первого набора данных, или для других частоты вращения и нагрузки), и снова выполнить регрессионный анализ, используя первый набор данных и последующий набор данных. Затем упомянутый способ возвращается к этапу 408 для определения, является ли регрессионный анализ статистически значимым. Если этот анализ не является статистически значимым, способ повторяет этапы 410-414, на которых осуществляется сбор одного или нескольких последующих наборов данных и выполнение регрессионного анализа, до тех пор, пока регрессионный анализ не будет иметь достаточно образцов для статистической значимости.
Когда на этапе 408 определено, что регрессионный анализ является статистически значимым, способ 400 продолжается на этапе 416 определением на основе результатов регрессионного анализа факта наличия разбалансировки цилиндров, превышающей пороговое значение. Как описано ранее, посредством регрессионного анализа определяют отношение воздуха к топливу в каждом из цилиндров. Наличие разбалансировки цилиндра может быть определено, если в одном или нескольких цилиндрах отношение воздуха к топливу отличается от порогового значения отношения воздуха к топливу, например, если отношение воздуха к топливу в цилиндре отличается от среднего отношения воздуха к топливу во всех цилиндрах, или если отношение воздуха к топливу в цилиндре отличается от требуемого отношения воздуха к топливу. Если разбалансировка превышает пороговое значение, способ 400 продолжается на этапе 418 оповещением о разбалансировке в цилиндре. Если разбалансировка превышает пороговое значение, способ продолжается на этапе 420 оповещением об отсутствии разбалансировки цилиндров. После этого способ 400 завершается.
В описанных выше способах 300 и 400 контроль разбалансировки цилиндров осуществляется с использованием выходного сигнала посткаталитического, низового датчика выхлопных газов, который оценивает выхлопные газы за соединением выхлопных потоков нескольких цилиндров. Контроль разбалансировки цилиндров основан на том факте, что докаталитический, верховой датчик выхлопных газов, который оценивает выхлоп перед тем, как происходит слияние выхлопных потоков нескольких цилиндров, не одинаково измеряет вклад каждого из цилиндров (поскольку такой вклад, измеренный датчиком, зависит от динамики потока выхлопа), что оказывает влияние на измеренный низовым датчиком состав газа. Контроль разбалансировки также основан на работе двигателя в различных условиях, в которых образуются потоки с различной динамикой.
Низовой датчик оценивает посткаталитические выхлопные газы всего множества цилиндров. Низовой датчик не обеспечивает непосредственного измерения отношения воздуха к топливу в цилиндрах (например, поскольку он является узкополосным датчиком), но отношения воздуха к топливу в цилиндрах могут быть получены в результате других измерений и управляющих воздействий. В этом случае верховой датчик не используется напрямую. От физического положения верхового датчика зависит вклад измерений верховым датчиком различных цилиндров в каждой из рабочих точек. Весовые коэффициенты для каждого из цилиндров могут быть структурированы и сохранены в виде таблицы. Результатом регрессии выбранных структур значений, вместе с низовым отношением воздуха к
топливу, являются значения вклада каждого из цилиндров в отношение воздуха к топливу, которые могут быть использованы при вычислении для определения баланса в цилиндрах.
Техническим результатом контроля разбалансировки отношения воздуха к топливу в цилиндрах с использованием выходного сигнала низового датчика выхлопных газов (например, расположенного за каталитическим нейтрализатором по ходу потока) является одинаковое измерение отношения воздуха к топливу в каждом из цилиндров во множестве условий работы, при снижении вычислительной нагрузки контроллера.
В одном из вариантов осуществления способ для двигателя содержит регулирование работы двигателя на основе информации о разбалансировке отношения воздуха к топливу в цилиндре, причем обнаружение разбалансировки осуществляется на основе выходного сигнала второго датчика и множества весовых коэффициентов отдельных цилиндров, при этом второй датчик расположен в системе выхлопа по ходу потока за первым датчиком, расположенного в системе выхлопа. Второй датчик расположен в системе выхлопа за зоной соединения, в которой происходит слияние потоков выхлопа множества цилиндров, и первый датчик расположен по ходу потока перед зоной соединения.
Каждый из множества весовых коэффициентов отдельных цилиндров отражает вклад определенного цилиндра в общее отношение воздуха к топливу, измеренное первым датчиком при определенных условиях по скорости вращения двигателя и нагрузке. Множество весовых коэффициентов отдельных цилиндров содержит весовые коэффициенты для каждого из множества цилиндров, по меньшей мере, при одном условии по скорости вращения двигателя и нагрузке. Информация о разбалансировке отношения воздуха к топливу в цилиндре может быть дополнительно основана на требуемом значении отношения воздуха к топливу на первом датчике.
Для определения разбалансировки отношения воздуха к топливу в цилиндре упомянутый способ содержит, для первого условия скорости вращения двигателя и нагрузки: сохранение первого набора данных, содержащего первое отношение воздуха к топливу в низовой точке по ходу потока, измеренное вторым датчиком, соответствующее первое требуемое значение отношения воздуха к топливу на первом датчике, и первый поднабор множества весовых коэффициентов отдельных цилиндров, причем первый поднабор содержит весовой коэффициент для каждого из множества цилиндров при первом условии по скорости вращения двигателя и нагрузке; и выполнение первого регрессионного анализа первого набора данных с целью определения первого отношения воздуха к топливу в каждом из множества цилиндров. Упомянутый способ дополнительно содержит индикацию разбалансировки отношения воздуха к топливу в случае, если, по меньшей мере, одно из первых отношений воздуха к топливу отличается от среднего отношения воздуха к топливу более чем на пороговое значение.
Для определения разбалансировки отношения воздуха к топливу в цилиндре упомянутый способ может дополнительно содержать, для второго условия скорости вращения двигателя и нагрузки: сохранение второго набора данных, содержащего второе отношение воздуха к топливу в низовой точке по ходу потока, измеренное вторым датчиком, соответствующее второе требуемое значение отношения воздуха к топливу на верховом датчике выхлопных газов, и второй поднабор множества весовых коэффициентов отдельных цилиндров, причем второй поднабор содержит весовой коэффициент для каждого из множества цилиндров при втором условии по скорости вращения двигателя и нагрузке; и выполнение второго регрессионного анализа первого набора данных и второго набора данных с целью определения второго отношения воздуха к топливу в каждом из множества цилиндров.
Упомянутый способ может дополнительно содержать многократное повторение упомянутого сохранения и выполнения регрессионного анализа для одного или нескольких последующих условий по скорости вращения двигателя и нагрузке до тех пор, пока не будет достигнута индикация статистической значимости регрессионного анализа, и индикацию разбалансировки отношения воздуха к топливу в цилиндре, если отношение воздуха к топливу, по меньшей мере, одного из множества цилиндров, определенное посредством статистически значимого регрессионного анализа, отличается от среднего отношения воздуха к топливу более чем на пороговое значение.
В одном из примеров регулирование работы двигателя содержит регулирование количества топлива, впрыскиваемого, по меньшей мере, в один цилиндр. В других примерах регулирование работы двигателя содержит один или несколько из нижеследующих вариантов: регулирование предельного крутящего момента двигателя, снижение давления наддува, регулирование момента впрыска топлива, и уменьшение запаздывания зажигания.
Второй датчик расположен по ходу потока за каталитическим нейтрализатором, расположенного в выпускном канале, который связан с двигателем по текучей среде, и первый датчик расположен перед каталитическим нейтрализатором по ходу потока.
Упомянутый способ дополнительно содержит определение множества весовых коэффициентов отдельных цилиндров в режиме обучения двигателя. Режим обучения двигателя содержит, для каждого из множества условий по скорости вращения двигателя и нагрузке, намеренное изменение отношения воздуха к топливу в каждом из множества цилиндров и измерение каждого результирующего отношения воздуха к топливу первым датчиком; и определение множества весовых коэффициентов отдельных цилиндров на основе результирующих значений отношения воздуха к топливу в каждом цилиндре для каждых из множества условий по скорости вращения двигателя и нагрузке.
Другой способ для двигателя содержит индикацию разбалансировки отношения воздуха к топливу в цилиндре на основе регрессионного анализа, выполненного по множеству измеренных значений посткаталитического отношения воздуха к топливу, множеству соответствующих значений требуемого докаталитического отношения воздуха к топливу, и множеству весовых коэффициентов отдельных цилиндров.
Каждый из множества весовых коэффициентов отдельных цилиндров отражает вклад определенного цилиндра в докаталитическое отношение воздуха к топливу, измеренное верховым датчиком выхлопных газов при определенных условиях по скорости вращения двигателя и нагрузке. Упомянутый способ дополнительно содержит регулирование работы двигателя в ответ на индикацию разбалансировки в цилиндре. Упомянутое регулирование работы двигателя содержит увеличение количества топлива, подаваемого в цилиндр, связанный с разбалансировкой отношения воздуха к топливу в цилиндре, если разбалансировка отношения воздуха к топливу указывает на разбалансировку обеднения. Упомянутое регулирование работы двигателя содержит снижение количества топлива, подаваемого в цилиндр, связанный с разбалансировкой отношения воздуха к топливу в цилиндре, если разбалансировка отношения воздуха к топливу указывает на разбалансировку обогащения.
Вариант осуществления системы содержит двигатель с множеством цилиндров; выпускной коллектор, соединенный по текучей среде со множеством цилиндров и с выпускным каналом; каталитический нейтрализатор, расположенный в выпускном канале; верховой датчик выхлопных газов, расположенный перед каталитическим нейтрализатором по ходу потока; низовой датчик выхлопных газов, расположенный за каталитическим нейтрализатором по ходу потока; и контроллер с машиночитаемыми командами для: измерения посткаталитического отношения воздуха к топливу посредством низового датчика выхлопных газов во множестве различных условий работы, выполнения регрессионного анализа для определения отношения воздуха к топливу в каждом из множества цилиндров; и осуществления индикации разбалансировки в цилиндре на основе отношения воздуха к топливу в каждом цилиндре, причем регрессионный анализ выполняется по каждому из измеренных отношений воздуха к топливу, множеству соответствующих требуемых значений докаталитического отношения воздуха к топливу, и множеству весовых коэффициентов отдельных цилиндров, каждый из которых отражает вклад определенного цилиндра в докаталитическое отношение воздуха к топливу, измеренное верховым датчиком выхлопных газов при определенных условиях по скорости вращения двигателя и нагрузке.
В одном из примеров верховой датчик выхлопных газов может быть расположен в выпускном коллекторе. В другом примере верховой датчик выхлопных газов может быть расположен в выпускном канале за выпускным коллектором и перед каталитическим нейтрализатором по ходу потока. Верховой датчик выхлопных газов является широкополосным датчиком, и низовой датчик выхлопных газов является узкополосным датчиком.
Необходимо отметить, что примеры приведенных здесь алгоритмов управления и оценки могут быть использованы с двигателями и/или системами транспортных средств различных конструкций. Раскрытые в настоящей заявке способы и алгоритмы управления могут быть записаны в виде исполнимых команд в постоянном запоминающем устройстве, и могут быть реализованы системой управления, содержащей контроллер в сочетании с различными датчиками, приводами и другими аппаратными средствами двигателя. Конкретные раскрытые в настоящей заявке алгоритмы могут представлять собой одну или несколько из любого количества стратегий вычислений, таких как основанная на событиях, основанная на прерываниях, многозадачная, многопоточная и тому подобные. Таким образом, различные описанные действия, процессы и/или функции могут быть выполнены в представленной последовательности, параллельно, или, в некоторых случаях, могут быть опущены. Аналогично, такой порядок вычислений не обязателен для достижения преимуществ и реализации признаков раскрытых в настоящей заявке примеров осуществления, но приведен для простоты графического представления и описания. Одно или несколько описанных действий, процессов и/или функций могут быть выполнены повторно в зависимости от конкретной используемой стратегии. Более того, описанные действия, процессы и/или функции могут графически представлять код, который должен быть записан в энергонезависимой памяти машиночитаемого запоминающего устройства в системе управления двигателем, в которой описанные действия реализуются посредством исполнения команд в системе, содержащей различные аппаратные средства двигателя в сочетании с электронным контроллером.
Должно быть ясно, что конфигурации и последовательности, раскрытые в данном документе, являются по своей сути примерами, и эти конкретные варианты осуществления не должны быть восприняты в ограничивающем значении, поскольку возможно множество модификаций. Например, вышеупомянутая технология может быть применена к V-образному шестицилиндровому, рядному четырехцилиндровому, рядному шестицилиндровому, V-образному двенадцатицилиндровому, оппозитному четырехцилиндровому и другим типам двигателей. Объем настоящего изобретения содержит все неизвестные и неочевидные сочетания и частичные сочетания различных систем, конфигураций, и других признаков, функций и/или свойств, раскрытых в данном документе.
В последующих пунктах формулы изобретения конкретно указаны определенные сочетания и частичные сочетания, которые следует считать новыми и неочевидными. Эти пункты формулы могут ссылаться на «элементы» или «первые элементы», или их эквиваленты. Такие пункты формулы следует считать содержащими возможность наличия одного или нескольких таких элементов, но не требующими наличия и не исключающими возможность наличия двух или большего количества таких элементов. Другие сочетания или частичные сочетания раскрытых признаков, функций, элементов и/или свойств могут быть заявлены посредством внесения поправок в настоящие пункты формулы или через включение новых пунктов формулы в настоящую или связанную заявку. Такие пункты формулы, вне зависимости от того, шире, уже, эквивалентные или отличные от исходных пунктов формулы изобретения, также включены в объем настоящего изобретения.
Изобретение, в целом, относится к способам обнаружения разбалансировки отношения воздуха к топливу в цилиндрах и к соответствующим системам. Способ обнаружения разбалансировки отношения воздуха к топливу в цилиндре двигателя заключается в регулировке работы двигателя на основе индикации разбалансировки отношения воздуха к топливу в цилиндре. Обнаружение разбалансировки осуществляют на основе по меньшей мере двух регрессионных анализов. По меньшей мере два регрессионных анализа включают первый регрессионный анализ, выполняемый для первого набора данных, и второй регрессионный анализ, выполняемый для большего, второго, набора данных, причем каждый из первого и второго наборов данных содержит выходной сигнал второго датчика, расположенного в системе выхлопа по ходу потока за первым датчиком, расположенным в системе выхлопа, и множество весовых коэффициентов отдельных цилиндров. Каждый из множества весовых коэффициентов отражает вклад соответствующего отдельного цилиндра в общее отношение воздуха к топливу, измеренное первым датчиком при определенных условиях по скорости вращения и нагрузке двигателя. Технический результат - определение и устранение условий разбалансировки отношения воздуха к топливу в конкретном цилиндре двигателя. 2 н. 13 з.п. ф-лы, 4 ил.
1. Способ обнаружения разбалансировки отношения воздуха к топливу в цилиндре двигателя, содержащий:
регулирование работы двигателя на основе индикации разбалансировки отношения воздуха к топливу в цилиндре, причем обнаружение разбалансировки осуществляют на основе по меньшей мере двух регрессионных анализов, причем по меньшей мере два регрессионных анализа включают первый регрессионный анализ, выполняемый для первого набора данных, и второй регрессионный анализ, выполняемый для большего, второго, набора данных, причем каждый из первого и второго наборов данных содержит выходной сигнал второго датчика, расположенного в системе выхлопа по ходу потока за первым датчиком, расположенным в системе выхлопа, и множество весовых коэффициентов отдельных цилиндров, причем каждый из множества весовых коэффициентов отражает вклад соответствующего отдельного цилиндра в общее отношение воздуха к топливу, измеренное первым датчиком при определенных условиях по скорости вращения и нагрузке двигателя.
2. Способ по п. 1, в котором второй датчик расположен в системе выхлопа по ходу потока за зоной соединения, в которой происходит слияние потоков выхлопа множества цилиндров.
3. Способ по п. 2, в котором первый датчик расположен перед зоной соединения по ходу потока, и при этом множество весовых коэффициентов отдельных цилиндров содержит весовой коэффициент для каждого из множества цилиндров по меньшей мере при одном условии по скорости вращения двигателя и нагрузке.
4. Способ по п. 3, содержащий для определения разбалансировки отношения воздуха к топливу в цилиндре при первом условии скорости вращения двигателя и нагрузки:
сохранение первого набора данных, содержащего первое отношение воздуха к топливу в низовой точке по ходу потока, измеренное вторым датчиком, соответствующее первое требуемое значение отношения воздуха к топливу на первом датчике и первый поднабор множества весовых коэффициентов отдельных цилиндров, причем первый поднабор содержит весовой коэффициент для каждого из множества цилиндров при первом условии по скорости вращения двигателя и нагрузке; и
выполнение первого регрессионного анализа первого набора данных с целью определения первого отношения воздуха к топливу в цилиндре для каждого из множества цилиндров.
5. Способ по п. 4, дополнительно содержащий для определения разбалансировки отношения воздуха к топливу в цилиндре при втором условии скорости вращения двигателя и нагрузки:
сохранение второго набора данных, содержащего второе отношение воздуха к топливу в низовой точке, измеренное вторым датчиком, соответствующее второе требуемое значение отношения воздуха к топливу на первом датчике и второй поднабор множества весовых коэффициентов отдельных цилиндров, причем второй поднабор содержит весовой коэффициент для каждого из множества цилиндров при втором условии по скорости вращения двигателя и нагрузке; и
выполнение второго регрессионного анализа первого набора данных и второго набора данных с целью определения второго отношения воздуха к топливу в цилиндре для каждого из множества цилиндров.
6. Способ по п. 5, дополнительно содержащий многократное повторение упомянутого сохранения и выполнения последующего регрессионного анализа для одного или нескольких последующих условий по скорости вращения двигателя и нагрузке до индикации статистической значимости последующего регрессионного анализа и индикацию того, что разбалансировка отношения воздуха к топливу в цилиндре является разбалансировкой отношения воздуха к топливу в цилиндре для первого цилиндра из множества цилиндров, если статистически значимое отношение воздуха к топливу для первого цилиндра из множества цилиндров, определенное посредством статистически значимого регрессионного анализа, отличается от среднего отношения воздуха к топливу более чем на пороговое значение.
7. Способ по п. 6, в котором регулирование работы двигателя содержит регулирование количества топлива, впрыскиваемого в первый цилиндр.
8. Способ по п. 2, в котором второй датчик расположен по ходу потока за каталитическим нейтрализатором, расположенным в выпускном канале, который связан с двигателем по текучей среде, и в котором первый датчик расположен перед каталитическим нейтрализатором по ходу потока.
9. Способ по п. 3, дополнительно содержащий определение множества весовых коэффициентов отдельных цилиндров в режиме обучения двигателя, причем режим обучения двигателя содержит:
для каждого из множества условий по скорости вращения двигателя и нагрузке, намеренное изменение отношения воздуха к топливу в каждом из множества цилиндров и измерение каждого результирующего отношения воздуха к топливу в выхлопе первым датчиком; и
определение множества весовых коэффициентов отдельных цилиндров на основе результирующих значений отношения воздуха к топливу в каждом цилиндре для каждых из множества условий по скорости вращения двигателя и нагрузке.
10. Способ по п. 1, в котором регулирование работы двигателя содержит один или несколько из нижеследующих вариантов: регулирование предельного крутящего момента двигателя, снижение давления наддува, регулирование момента впрыска топлива и уменьшение запаздывания зажигания.
11. Способ по п. 1, в котором индикация разбалансировки отношения воздуха к топливу в цилиндре дополнительно основана на требуемом значении отношения воздуха к топливу на первом датчике.
12. Способ по п. 5, дополнительно содержащий индикацию разбалансировки отношения воздуха к топливу в цилиндре в случае, если по меньшей мере одно из вторых отношений воздуха к топливу отличается от среднего отношения воздуха к топливу более чем на пороговое значение.
13. Способ обнаружения разбалансировки отношения воздуха к топливу в цилиндре двигателя, содержащий:
регулирование работы двигателя на основе индикации разбалансировки отношения воздуха к топливу в цилиндре, причем обнаружение разбалансировки осуществляют на основе по меньшей мере двух регрессионных анализов, включающих первый регрессионный анализ и второй регрессионный анализ, каждый из которых выполняют для соответствующих первого и второго наборов данных, содержащих множество измеренных значений посткаталитического отношения воздуха к топливу, множество соответствующих значений требуемого докаталитического отношения воздуха к топливу и множество весовых коэффициентов отдельных цилиндров, каждый из которых отражает вклад соответствующего отдельного цилиндра в общее отношение воздуха к топливу, измеренное в докаталитической области при определенных условиях по скорости вращения и нагрузке двигателя, причем второй набор данных включает в себя первый набор данных и причем второй набор данных больше, чем первый набор данных.
14. Способ по п. 13, в котором регулирование работы двигателя содержит увеличение количества топлива, подаваемого в цилиндр, связанный с разбалансировкой отношения воздуха к топливу в цилиндре, если разбалансировка отношения воздуха к топливу в цилиндре указывает на разбалансировку обеднения.
15. Способ по п. 13, в котором регулирование работы двигателя содержит уменьшение количества топлива, подаваемого в цилиндр, связанный с разбалансировкой отношения воздуха к топливу в цилиндре, если разбалансировка отношения воздуха к топливу в цилиндре указывает на разбалансировку обогащения.
| US 2011282541 A1, 17.11.2011 | |||
| US 6668812 B2, 30.12.2003 | |||
| US 75977091 B2, 06.10.2009 | |||
| US 2009283080 A1, 19.11.2009 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОЗДУХА, ВПУСКАЕМОГО В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ, И СООТВЕТСТВУЮЩИЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2209991C2 |

